
UTILIZAÇÃO DE UM MODELO NÃO ESTACIONÁRIO DE FILAS NO
DIMENSIONAMENTO DE POSIÇÕES DE DESCARGA
EM TERMINAIS DE CROSS DOCKING
Antonio Galvão Novaesa
Roberta Briesemeistera
Edson Tadeu Bezb
Daniel Domingos Adrianob
a Departamento de Engenharia de Produção,
Universidade Federal de Santa Catarina, b Univali - Universidade do Vale do Itajaí
São José, SC
RESUMO
Cross docking é uma forma de operar um terminal de carga, na qual a mercadoria recebida não é armazenada na
forma tradicional observada em centros de distribuição, mas é descarregada, separada, rotulada e deslocada
internamente para ser carregada e distribuída através de uma outra frota de caminhões, o mais rapidamente
possível. Com isso, o custo de estoque é sensivelmente reduzido, como também o lead-time do processo. Neste
trabalho, utilizamos modelo não estacionário de fila para dimensionar o número de posições de recepção na doca
de descarga dos caminhões alimentadores, bem como o espaço necessário para estacionamento dos veículos em
espera.
ABSTRACT
Cross docking is a form of operating freight terminals, in which the receiving products are not stocked in the
traditional way observed in cargo distribution centres but, instead, are discharged, sorted, labelled and then
transferred internally to be loaded and distributed by another truck fleet, as quickly as possible. With this approach,
inventory costs are significantly reduced, as well the process lead-time. In this work a non-stationary time-
dependent queueing model is used to estimate the number of discharging doors in the receiving dock, and also the
required space to park the trucks waiting in the queue.
1. INTRODUÇÃO
Cross docking é uma forma de operação logística utilizada por empresas de diversos setores
industriais e comerciais em que são transferidos para outros veículos de carga e da forma mais
direta possível, produtos que chegam ao terminal, sem que se formem estoques intermediários
apreciáveis. Essa prática visa diversos objetivos: consolidação de cargas provenientes de vários
fornecedores, redução do lead-time entre fornecedores e clientes, redução do custo de estoque,
redução dos custos de picking-up na formação de pedidos, etc. (Van Belle et al., 2012). Boysen
e Fliedner (2010) afirmam que esta prática logística é usada principalmente na execução de
entregas em centros urbanos, onde a circulação de veículos de grande porte sofre restrições
relacionadas à sua dimensão e peso, impedindo-os de efetuar as entregas. Tais veículos
descarregam seus produtos em um armazém conhecido como “doca transversal” (cross docking
terminal). Os produtos cruzam o armazém em esteiras e/ou carrinhos manuais e, em seguida,
são carregados noutros veículos, que efetuarão as entregas.
Num terminal de cross docking, os lotes de carga trazidos em caminhões alimentadores são
descarregados, separados de acordo com o destino final e, em seguida, deslocados internamente
para as baias de despacho, onde são carregados em veículos destinados à distribuição (Bartholdi
e Gue, 2004; Vis e Roodbergen, 2008)). Os veículos de distribuição, tão logo estejam
carregados, partem para efetuar as entregas nos seus destinos finais. Em contraste com o sistema
de armazenagem tradicional, a retenção da carga no terminal é reduzida ao máximo possível,
normalmente menos do que 24 horas. Como resultado, a modalidade cross docking permite a
consolidação de muitos pedidos de menor tamanho, provenientes de diversos fornecedores, e
destinando-os a vários destinatários, gerando redução no custo de transporte e de estoque,
quando comparados às tradicionais formas de abastecimento (Stephan e Boysen, 2011).
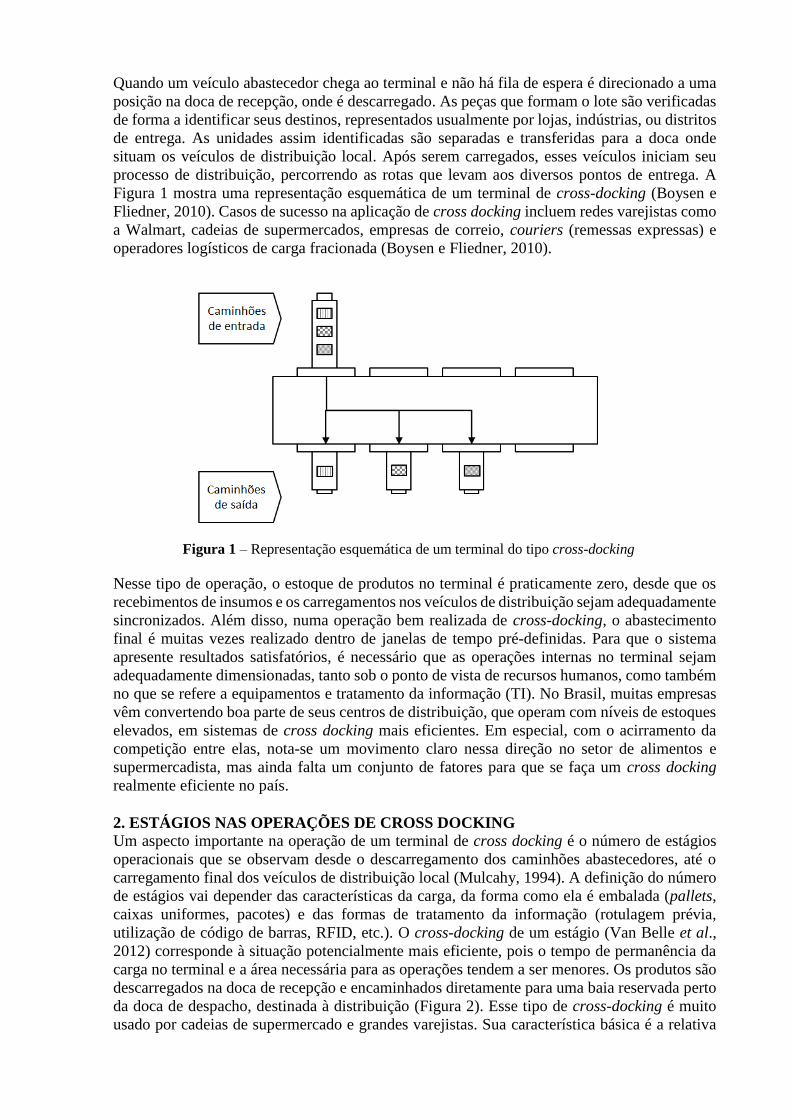
Quando um veículo abastecedor chega ao terminal e não há fila de espera é direcionado a uma
posição na doca de recepção, onde é descarregado. As peças que formam o lote são verificadas
de forma a identificar seus destinos, representados usualmente por lojas, indústrias, ou distritos
de entrega. As unidades assim identificadas são separadas e transferidas para a doca onde
situam os veículos de distribuição local. Após serem carregados, esses veículos iniciam seu
processo de distribuição, percorrendo as rotas que levam aos diversos pontos de entrega. A
Figura 1 mostra uma representação esquemática de um terminal de cross-docking (Boysen e
Fliedner, 2010). Casos de sucesso na aplicação de cross docking incluem redes varejistas como
a Walmart, cadeias de supermercados, empresas de correio, couriers (remessas expressas) e
operadores logísticos de carga fracionada (Boysen e Fliedner, 2010).
Figura 1 – Representação esquemática de um terminal do tipo cross-docking
Nesse tipo de operação, o estoque de produtos no terminal é praticamente zero, desde que os
recebimentos de insumos e os carregamentos nos veículos de distribuição sejam adequadamente
sincronizados. Além disso, numa operação bem realizada de cross-docking, o abastecimento
final é muitas vezes realizado dentro de janelas de tempo pré-definidas. Para que o sistema
apresente resultados satisfatórios, é necessário que as operações internas no terminal sejam
adequadamente dimensionadas, tanto sob o ponto de vista de recursos humanos, como também
no que se refere a equipamentos e tratamento da informação (TI). No Brasil, muitas empresas
vêm convertendo boa parte de seus centros de distribuição, que operam com níveis de estoques
elevados, em sistemas de cross docking mais eficientes. Em especial, com o acirramento da
competição entre elas, nota-se um movimento claro nessa direção no setor de alimentos e
supermercadista, mas ainda falta um conjunto de fatores para que se faça um cross docking
realmente eficiente no país.
2. ESTÁGIOS NAS OPERAÇÕES DE CROSS DOCKING
Um aspecto importante na operação de um terminal de cross docking é o número de estágios
operacionais que se observam desde o descarregamento dos caminhões abastecedores, até o
carregamento final dos veículos de distribuição local (Mulcahy, 1994). A definição do número
de estágios vai depender das características da carga, da forma como ela é embalada (pallets,
caixas uniformes, pacotes) e das formas de tratamento da informação (rotulagem prévia,
utilização de código de barras, RFID, etc.). O cross-docking de um estágio (Van Belle et al.,
2012) corresponde à situação potencialmente mais eficiente, pois o tempo de permanência da
carga no terminal e a área necessária para as operações tendem a ser menores. Os produtos são
descarregados na doca de recepção e encaminhados diretamente para uma baia reservada perto
da doca de despacho, destinada à distribuição (Figura 2). Esse tipo de cross-docking é muito
usado por cadeias de supermercado e grandes varejistas. Sua característica básica é a relativa

uniformidade dos produtos recebidos em cada caminhão de abastecimento. Suponhamos, no
exemplo do caso supermercadista, que chegue um caminhão com produtos alimentícios não
perecíveis de uma mesma indústria, envolvendo leite em pó, café solúvel, achocolatados, etc.,
todos embalados em caixas de papelão. Esses produtos, uma vez descarregados numa porta a
da doca de recepção (Figura 3), são conduzidos a uma baia b. Não existe uma identificação de
destino individualizada pacote por pacote, pois os produtos de cada tipo são homogêneos dentro
de cada categoria específica.
Figura 2 – Cross-docking de um estágio
Figura 3 – Cross-docking de dois estágios
Os pontos de destino da carga são alocados aos diversos roteiros, cada um deles realizado por
um veículo de distribuição. O funcionário recebe o borderô referente ao carregamento de um
determinado veículo, verifica quantas caixas, digamos, de leite em pó, serão carregadas, vai à
baia onde está esse produto, coloca o número certo de caixas no carrinho, e continua a operação
levando o produto a ser carregado ao respectivo veículo de distribuição. Esse processo fica mais
eficiente quando toda a carga é recebida e despachada em pallets, pois então se empregam
equipamentos de maior produtividade. Mas, para isso, os volumes operados devem ser maiores,
pois seria inadequado desfazer os carregamentos de pallets no terminal para separar produtos
em pequenas quantidades, de forma a suprir destinos com menor demanda. O sistema
operacional se torna ainda mais eficiente quando o fornecedor (a indústria, neste caso) envia
antecipadamente, por meio da Internet ou por outro sistema de Tecnologia da Informação, todas
as informações ao terminal. Assim, todos os borderôs de entrega estarão prontos quando a

operação de descarga, na doca de recepção, se inicia, permitindo o imediato embarque nos
veículos de distribuição, e assim reduzindo o ciclo operacional no terminal.
No cross-docking de dois estágios (Van Belle et al., 2012), os produtos são descarregados na
doca de recepção, onde as unidades são muitas vezes rotuladas com código de barras, e
encaminhadas a uma baia de primeiro estágio 𝑏1, situada perto da doca de recepção (Figura 3).
Na baia 𝑏1 é feita a triagem dos produtos segundo o destino, sendo identificado, para cada
unidade de carga, o veículo de distribuição correspondente. Em seguida, a unidade de carga é
transferida para uma baia de segundo estágio 𝑏2, situada perto do veículo de distribuição, de
onde será posteriormente carregado.
2. MODELOS DE FILAS PARA DIMENSIONAMENTO DA DOCA DE RECEPÇÃO
A literatura sobre cross-docking vem relatando o desenvolvimento e aplicações de diversos
tipos de modelos voltados à sua análise e operação. Alguns autores (Agustina et al., 2010;
Vahdani e Zandieh, 2010; Soltani e Sadjadi, 2010; Boysen e Fliedner, 2010) procuraram
minimizar o tempo total de percurso interno no terminal, para isso organizando os locais de
descarga dos veículos alimentadores de forma combinada com os locais de partida dos veículos
de distribuição, visando minimizar as distâncias percorridas internamente. Neste trabalho
trataremos especificamente do dimensionamento da doca de recepção dos caminhões de
abastecimento. Um veículo que chega ao terminal de cross docking para ser descarregado e
encontra uma ou mais posições de atendimento não ocupadas, sendo direcionado para uma
delas, para imediato descarregamento. Muitas vezes, no entanto, todas as posições de descarga
estão ocupadas e o veículo deve entrar numa fila, recebendo, para isso, uma senha. Para o
dimensionamento da área de recepção de carga na respectiva doca é necessário determinar o
número de baias necessárias e, de forma concomitante, estimar o número de veículos na fila,
para isso adotando-se um nível de serviço adequado, de forma a prever espaço para
estacionamento, não mantendo os caminhões esperando durante um tempo excessivo. O
número de posições de descarga operando em paralelo na doca de recepção é determinado pela
aplicação de um modelo matemático de fila, ou por simulação.
No que se refere ao dimensionamento das baias de descarga dos caminhões abastecedores
através de modelos de fila, poucos trabalhos têm sido relatados na literatura. Taniguchi et al
(1999) utiliza um modelo clássico de filas do tipo 𝑀/𝐸𝐾/𝑆/∞, conforme a tipologia de Kendall
(Page, 1972; Fogliati e Mattos, 2007; Novaes et al., 2015), em que as chegadas dos caminhões
são regidas por um processo de Poisson, o atendimento obedece a uma distribuição de Erlang
de ordem k, com S posições de serviço, e capacidade de espera infinita. Shi et al. (2014), por
outro lado, analisam o problema através de um modelo de simulação (Arena), e adotam uma
distribuição triangular para descrever os tempos de descarregamento dos veículos.
No caso de terminais de cross-docking, o tipo de distribuição das chegadas pode ser Poisson,
ou pode obedecer a outro tipo de distribuição probabilística. O atendimento, no caso, é o
processo de descarga do caminhão, cujo tempo de duração vai depender de uma série de fatores,
como o tipo da carga, o equipamento utilizado, o tipo de Tecnologia da Informação empregado
na transmissão de informações entre a empresa fornecedora dos produtos e o operador do
terminal, os recursos humanos alocados à operação, o layout do terminal, etc. Na plataforma
de recepção, são alocadas n posições de descarga (baias, ou portas de recepção) para os veículos
previstos para essa operação. O número de posições de espera na fila é uma das variáveis que
se pretende dimensionar de forma a projetar as áreas externas do terminal. Para determinar a
solução teórica de um modelo de filas clássico, admite-se que o processo permaneça em
operação com as mesmas características básicas por um período de tempo adequado,
convergindo então para uma situação de equilíbrio estocástico, denominada regime
estacionário. Tal comportamento é derivado das propriedades de Cadeias de Markov, em que

a maioria dos modelos de fila se baseia (Fogliatti e Mattos, 2007). Um grande número de
modelos de filas atende a essa condição. Há muitas situações práticas em que isso ocorre. Por
exemplo, o atendimento de veículos num posto rodoviário de pedágio durante certo período de
tempo, navios esperando atracação num terminal portuário, filas de clientes nos caixas de
bancos, etc.
No entanto, modelos clássicos de fila desse tipo geralmente não se aplicam ao dimensionamento
de terminais de cross docking, uma vez que, na maioria dos casos, o processo de formação da
fila não atinge um regime estacionário, que é um requisito básico para sua aplicação. Três
razões principais justificam essa afirmação. Em primeiro lugar, as operações de cross docking
são realizadas dentro de períodos de tempo pré-definidos (janelas de tempo), em que os veículos
chegam ao terminal obedecendo a uma programação temporal pré-fixada, e normalmente curta.
Durante essa janela de tempo, nem sempre o processo estocástico tem condições de atingir o
regime estacionário. Em segundo lugar, a taxa de chegadas dos caminhões ao terminal pode
variar significativamente ao longo do período de operação, situação essa que difere
substancialmente dos casos clássicos. Finalmente, ao terminar o tempo estabelecido
previamente para a chegada dos caminhões, pode ainda haver veículos na fila, fazendo com que
a operação de descarga continue por mais algum tempo, sem que se observem novas chegadas.
Esses aspectos serão discutidos em maiores detalhes nas próximas seções.
Uma forma alternativa de analisar filas é devida a Gordon F. Newell, que foi professor na
Universidade da California, Berkeley. Um de seus desenvolvimentos mais importantes é a
análise de filas não estacionárias (Newell, 1968, 1971), que se adaptam muito bem a problemas
práticos de cross-docking, como o analisado neste texto. Em primeiro lugar, na grande maioria
dos modelos clássicos de fila, as chegadas são representadas por um processo de Poisson, com
uma taxa média representada por 𝜆, taxa média invariável ao longo do tempo. Num caso mais
geral, a taxa de chegada varia ao logo do tempo, sendo agora representada por 𝜆(𝑡), dentro do
intervalo {0, 𝑇}, que representa a janela de tempo. Em segundo lugar, os operadores são
obrigados agora a se enquadrar à janela de tempo pré-definida. De uma forma geral, 𝜆(𝑡) pode
representar matematicamente uma curva qualquer, mas, em nosso exemplo básico vamos
representa-lo por uma reta
𝜆(𝑡) = 𝛽 𝑡, com 0 ≤ 𝑡 ≤ 𝑇, (1)
sendo 𝛽 uma constante positiva. Nessa representação estamos descrevendo, de forma
simplificada, uma situação comportamental tipicamente encontrada no Brasil e na maioria dos
países latinos: as pessoas costumam deixar para a última hora o cumprimento de seus
compromissos previamente agendados. Neste caso, os motoristas não podem chegar ao terminal
antes de 𝑡 = 0 para serem atendidos, nem depois de 𝑡 = 𝑇. Há outros tipos de representação da
curva de λ, como o de Odoni e De Neufville (1992), que se refere às chegadas de passageiros
nas filas de check-in em aeroportos. O que se procura é representar satisfatoriamente o
comportamento humano quando há claros limites de atendimento em termos temporais (janela
de tempo). De acordo com Odoni e De Neufville (1992), o comportamento dos usuários (neste
caso, os operadores de caminhões) segue, em linhas gerais a seguinte regra: cada operador de
um veículo alimentador que se destina ao terminal escolhe um momento t de chegada tal que,
na sua percepção, garante com uma probabilidade de 95%, ou maior, o cumprimento da
restrição superior da janela de tempo, ou seja, garantir o limite 𝑡 ≤ 𝑇. Assim, não estamos
considerando o valor absoluto de t, mas o valor percebido, ou antecipado, pelo transportador.
Em termos comportamentais, o valor percebido/antecipado por ele é fortemente influenciado
pelas suas piores experiências prévias, incluindo problemas de tráfego e condições
meteorológicas anteriores, bem como o rigor imposto pela administração do terminal no
cumprimento do horário pré-estabelecido. No início, a taxa 𝜆(𝑡) de chegadas de caminhões ao
terminal é baixa, e λ(𝑡) vai subindo lentamente até o instante T, conforme a expressão (1).
Esse enfoque mostra duas características que diferenciam significativamente o processo de
formação de filas de caminhões na plataforma de desembarque, quando comparado com o tipo
de fila clássico mencionado anteriormente:
(a) Há uma janela de tempo pré-definida para a chegada dos caminhões, que vai do
instante 𝑡 = 0, quando a doca de recebimento é aberta, até o instante 𝑡 = 𝑇, quando a
doca de recepção é fechada;
(b) Dentro da janela de tempo, observa-se que a taxa média de chegadas dos veículos não
é constante, mas varia de acordo com uma função 𝜆(𝑡).
Observa-se que em situações desse tipo, com regras operacionais suficientemente rígidas, o
processo estocástico de formação de filas pode não atingir o equilíbrio estacionário mencionado
anteriormente para os modelos clássicos de fila. Torna-se então necessário aplicar um tipo de
modelagem que não dependa do caráter estacionário do processo. Para isso, Newell (1968,
1971) desenvolveu uma representação contínua para o problema de formação de filas, apoiado
no modelo de difusão desenvolvido por Fokker e Planck. Para isso, transformamos a variável
que exprime as chegadas em termos discretos (caminhões) numa outra variável, que pode ser
entendida como uma representação contínua aproximada: neste caso são caixas padrões
(cartons) de dimensões 0,40×0,30×0,18 m, com volume unitário de 0,0216 𝑚2, que contêm os
diversos produtos considerados na análise.
Consideramos, nesta aplicação, o caso de uma cadeia supermercadista que possui um terminal
de cross docking, e que opera a descarga de veículos de abastecimento de uma determinada
indústria durante uma janela de tempo de 𝑇 = 2 horas, num total de 𝐺 = 22.000 caixas-
equivalentes (cartons) por dia. Na aplicação, cada veículo comporta, em média, 464,5 caixas.
A integral de 𝜆(𝑡) no intervalo 0 ≤ 𝑡 ≤ 𝑇 deve igualar a demanda total observada na janela de
tempo, ou seja
∫ 𝜆(𝑡) 𝑑𝑡𝑇
0 = ∫ 𝛽
𝑇
0𝑡 𝑑𝑡 = 𝛽
𝑇2
2= 𝐺 , (2)
que fornece 𝛽 = 2 𝐺/𝑇2. Por sua vez, a integral de 𝜆(𝑡), representada por 𝐴(𝑡), é dada por
𝐴(𝑡) = ∫ 2 𝐺
𝑇2
𝑡
0 𝑡 𝑑𝑡 =
𝐺
𝑇2 𝑡2, 0 ≤ 𝑡 ≤ 𝑇 (3)
3. PROCESSO DE FORMAÇÃO DA FILA
3.1 Equilíbrio entre oferta e demanda
Seja 𝐷(𝑡) a função acumulativa da capacidade de descarga do produto nas n portas operando
simultaneamente e em paralelo, no terminal. Cada porta tem capacidade para descarregar, em
média, 𝜇 caixas por hora. A capacidade total média da doca de descarga é, portanto, igual à 𝜇 𝑛.
Admitimos que a capacidade média de descarga seja constante durante o tempo, ou seja, 𝐷(𝑡)
varia linearmente em função do tempo:
𝐷(𝑡) = 𝑎 + 𝜇 𝑛 𝑡, para 𝑡 ≥ 𝑡0, vide (7). (4)
Vamos determinar o valor de 𝑎, indicado na relação (4), analisando, para isso, as características
estocásticas da fila de veículos que se forma à espera de atendimento (Newell, 1968, 1971).
Admitimos que não haja fila no instante 𝑡 = 0, ou seja, 𝑄(0) = 0, onde 𝑄(𝑡) exprime o
tamanho da fila no instante t. Numa primeira fase do processo, não haverá formação de fila,
pois os valores de 𝜆(𝑡) são poucos expressivos em comparação à quantidade de portas
disponíveis, a maioria delas ainda vazia. Essa situação de ausência de fila tende a permanecer
até um instante 𝑡0, quando 𝜆(𝑡) atinge uma taxa de crescimento igual à 𝜇 𝑛 (Newell, 1971), e a
curva 𝐴(𝑡) se separa da reta 𝐷(𝑡), conforme mostrado na Figura 4.

Assim, é necessário determinar 𝑡0 tal que
𝜆(𝑡0) = 𝜇 𝑛, (5)
ou seja, o instante 𝑡0 é aquele em que a taxa de chegadas dos veículos se torna igual à capacidade
de descarga total da doca (Newell, 1971), incluindo todas as portas, ou seja
𝜆(𝑡0) =2𝐺
𝑇2 𝑡0 = 𝜇 𝑛, (6)
conduzindo a
𝑡0 =𝜇 𝑛 𝑇2
2 𝐺 . (7)
No ponto 𝑡 = 𝑡0, as curvas 𝐴(𝑡) e 𝐷(𝑡) coincidem (Figura 4), ou seja
𝐺𝑡0
2
𝑇2 = 𝑎 + 𝜇 𝑛 𝑡0, (8)
levando à
𝑎 = 𝐺𝑡0
2
𝑇2− 𝜇 𝑛 𝑡0. (9)
Figura 4 – Pontos notáveis no processo de formação de fila
3.2 Duração do processo de descarregamento dos caminhões abastecedores
Idealmente, o processo de atendimento dos veículos abastecedores deveria terminar no instante
𝑡 = 𝑇 + 𝑆̅, quando o último caminhão acaba de ser descarregado (em média). 𝑆̅ representa o
tempo de descarga médio de um veículo. Mas, na maioria dos casos, não é isso que ocorre. De
fato, seja 𝑡𝑄 o momento em que 𝐷(𝑡) atinge o valor de G, ou seja, o momento em que a oferta
de serviço 𝐷(𝑡) atende plenamente a demanda diária G. Então o valor de 𝑡𝑄 é calculado através
da expressão (4), fazendo-se 𝐷(𝑡) = 𝐺:
𝐺 = 𝐷(𝑡𝑄) = 𝑎 + 𝜇 𝑛 𝑡𝑄 , (10)
Levando à
𝑡𝑄 =𝐺−𝐺
𝑡02
𝑇2+𝜇 𝑛 𝑡0
𝜇 𝑛 (11)
Para 𝐺 = 22.000 caixas, 𝑛 = 16 e 𝜇 = 642 caixas descarregadas por hora, a Figura 5 mostra
o resultado da variação de 𝐷(𝑡), que atinge o limite 𝐷(𝑡) = 𝐺 no instante 𝑡𝑄 = 2,51 ℎ, valor
maior do que 𝑇. Mostra também a formação da fila, identificada como a parte hachurada da
figura.

3.3 Extensão da fila
Teoricamente podemos considerar que, para situações de fila não estacionárias do tipo
analisado, a operação do terminal poderia se realizar com qualquer valor de n igual ou maior
do que a unidade. Ocorre que o processo de descarregar as 22.000 caixas de nosso exemplo,
levaria muito tempo para efetuar a operação, e o terminal tem que ser utilizado continuamente
para outras operações. O correto será estabelecer um tempo máximo de espera para os
caminhões, como também dimensionar a área de estacionamento adequada para os veículos que
esperam ser atendidos na fila. Por outro lado, se aumentarmos muito o número de portas na
doca, pode-se chegar a uma situação de excesso de oferta, com poucas filas, com funcionários
e facilidades (espaços no terminal, equipamentos, etc.) ociosos em boa parte do tempo. Dessa
forma, o objetivo da análise é determinar a alocação de portas na doca que equilibre os custos
de operação do terminal, com os custos operacionais dos transportadores. A análise da extensão
da fila gerada em cada alternativa possibilita que se faça essa comparação de custos.
A extensão 𝑄(𝑡) da fila varia entre os instantes 𝑡0 e 𝑡𝑄, conforme mostrado na Figura 5, sendo
que para 0 ≤ 𝑡 ≤ 𝑡0, a fila é nula. Temos então as seguintes formulações:
(a) 0 ≤ 𝑡 < 𝑡0, 𝑄(𝑡) = 0, (12)
(b) 𝑡𝑜 ≤ 𝑡 ≤ 𝑇, 𝑄(𝑡) = 𝐴(𝑡) − 𝐷(𝑡) (13)
(c) 𝑇 < 𝑡 ≤ 𝑡𝑄 𝑄(𝑡) = 𝐺 − 𝐷(𝑡) (14)
Figura 5 - Formação da fila no intervalo 𝑡0 ≤ 𝑡 ≤ 𝑡𝑄
Duas variáveis são de interesse primordial para a análise dos resultados: a fila média �̅�, em que
se considera todo o tempo de operação da descarga (0 ≤ 𝑡 ≤ 𝑡𝑄), e a fila máxima observada.
Posteriormente analisaremos os tempos de permanência na fila.
A) Fila média considerando todo o tempo de operação de descarga, calculada para o
intervalo 0 ≤ 𝑡 ≤ 𝑡𝑄:
�̅� =1
𝑡𝑄[∫ [𝐴(𝑡) − 𝐷(𝑡)]𝑑𝑡 + ∫ [𝐺 − 𝐷(𝑡)]𝑑𝑡
𝑡𝑄
𝑇
𝑇
𝑡0]. (15)
B) Valor máximo esperado da fila, dado por:
𝑄𝑚𝑎𝑥 = max𝑡0≤𝑡≤𝑡𝑄
[∅(𝑡) − 𝐷(𝑡)], (16)
onde ∅(𝑡) = 𝐴(𝑡) − 𝐷(𝑡) para 𝑡𝑜 ≤ 𝑡 ≤ 𝑇 e ∅(𝑡) = 𝐺 − 𝐷(𝑡) para 𝑇 < 𝑡 ≤ 𝑡𝑄.

3.4 Tempo de permanência na fila
O artigo seminal de Little e Graves (2008) mostra a validade da relação
�̅� = �̅� × �̅�, (17)
onde �̅� é o número médio de elementos na fila, �̅� é o tempo médio de espera de um elemento
na fila, e �̅� é a taxa média de chegadas por unidade de tempo. A expressão (17), muito utilizada
na prática, recebeu a denominação de “lei de Little”, em razão de seu caráter quase universal.
A relação (17) é notadamente simples e geral. Para sua aplicação é necessário que o processo
seja estacionário, mas há diversos casos de processos não estacionários, como o desta aplicação,
em que ela também é aplicável (Little e Graves, 2008).
A expressão (17) é utilizada neste trabalho para estimar o tempo médio de espera na fila, dado
por �̅� = �̅�/�̅�. Na Seção 3.3, foi mostrado como calcular a fila média para a situação 𝑡𝑄 > 𝑇.
Para esta situação, a fila se forma no intervalo 𝑡0 ≤ 𝑡 ≤ 𝑡𝑄. O número de veículos que chegam
ao terminal nesse intervalo é dado por
𝑁𝑉 = ∫ [𝜆(𝑡)/𝑢] 𝑑𝑡𝑇
𝑡0, (18)
onde u é a capacidade média do veículo; no nosso caso, igual a 464,5 caixas por veículo.
Lembramos que chegam zero veículos no intervalo 𝑇 < 𝑡 ≤ 𝑡𝑄 , daí a razão de a integral se
fechar em T. Tem-se então o valor médio �̅� para 𝑡0 ≤ 𝑡 ≤ 𝑇:
�̅� = 𝑁𝑉/(𝑇 − 𝑡0) , (19)
levando à
�̅� =�̅�
�̅�, (20)
onde �̅� é o tempo médio na fila e �̅� é a extensão média da fila. De forma semelhante, o tempo
de espera máximo na fila é dado por
𝑊𝑚𝑎𝑥 = 𝑄𝑚𝑎𝑥/�̅� (21)
4. VARIAÇÃO ALEATÓRIA DA EXTENSÃO DA FILA
Se dividirmos a janela de tempo 0 ≤ 𝑡 ≤ 𝑇 em intervalos infinitesimais 𝑑𝑡, em cada um deles
podemos admitir que as chegadas obedeçam aproximadamente a uma distribuição de Poisson,
com média 𝜆(𝑡) (Newell, 1961, 1978). Por ser uma distribuição de Poisson, a variância é
também igual à 𝜆(𝑡). Por outro lado, o tempo de descarga de um veículo é admitido como
regido por uma distribuição log-normal. Na fase de congestionamento, isto é, quando 𝑄(𝑡) >0, as n baias estão operando. A taxa de atendimento média, portanto, vai ser igual à 𝑛 𝜇. A
variância da diferença entre o processo de chegadas e o processo de atendimento vai se
acumulando ao logo do tempo 𝑡. A fila no instante t é dada por
𝑄(𝑡) = 𝑄(0) + 𝐴(𝑡) − 𝐷(𝑡), (22)
onde 𝑄(0) é a fila que já existia no processo quando 𝑡 = 0. No nosso caso, 𝑄(0) = 0. A
expectância da fila é
𝐸{𝑄(𝑡)} = 𝐸{𝐴(𝑡)} − 𝐸{𝐷(𝑡)} (23)
e a variância da fila
𝑉𝑎𝑟{𝑄(𝑡)} = 𝑉𝑎𝑟{𝑄(𝑡)} + 𝑉𝑎𝑟{𝐷(𝑡)} (24)

Além da fila média, dada por (23), Newell (1971) desenvolveu, em seu Capítulo 4, as seguintes
equações para a variância de 𝐴(𝑡) e de 𝐷(𝑡), cuja dedução detalhada não reproduzimos aqui
por falta de espaço
𝑉𝑎𝑟 {𝐴(𝑡)} = 𝜆 𝑡, e (25)
𝑉𝑎𝑟{𝐷(𝑡)} = (𝑡/𝑆̅) (𝜎𝑆
�̅�)
2
(26)
Uma vez que o processo de formação de filas é cumulativo ao longo do tempo, conforme
mostram as equações (25) e (26), e o número de etapas de evolução da fila é grande, o teorema
do limite central indica que a distribuição dos elementos na fila tende a se aproximar de uma
distribuição normal (Newell, 1971). Outro elemento importante na análise é o valor máximo
observado da fila, já analisado na Seção 3.4.
5. APLICAÇÃO
5.1 Tempo médio de descarga e taxa média de descarga dos veículos
Trata-se de uma empresa supermercadista, que opera um terminal do tipo cross-docking,
movimentando 22.000 cartons (caixas equivalentes) por dia, cada caixa com volume unitário
de 0,0216 𝑚2 e peso unitário de 13,8 kg, num total aproximado de 303,6 toneladas por dia.
Trataremos agora do processo de atendimento (descarga). Na Seção 2 analisamos o processo
de chegadas, representado por λ. Analisaremos agora o processo de descarga dos caminhões.
Admitimos que o tempo de descarga 𝑆 dos veículos seja regido por distribuição log-normal,
com valor médio 𝑆̅ = 43,8 minutos, e desvio padrão igual à 𝜎𝑆 = 12,8 minutos. A função
densidade de probabilidade 𝑓(𝑆) é dada por
𝑓(𝑆) =1
𝑆 𝑣 √2𝜋 exp [
−(𝑙𝑛 𝑆−𝑚)2
2𝑣2 ] , (27)
Onde m e v são dois parâmetros auxiliares dados por:
𝑚 = ln (�̅�2
√𝜎𝑆+�̅�2) e 𝑣 = √ln(
𝜎𝑆
�̅�2 + 1) (28)
Por sua vez, a taxa de descarga numa porta qualquer da doca é o inverso do tempo de descarga
(a menos de mudança de unidade), ou seja
�̅� =𝑢∗60
�̅�, (27)
com 𝑆̅ expresso em minutos, �̅� expresso em caixas por hora, �̅� em caixas por hora, sendo 𝑢 =464,5 caixas a capacidade de carga média de um caminhão, levando a �̅� = 636,30 caixas
descarregadas em média por hora.
5.2 Tempo médio de permanência no sistema
Seja 𝛾 a fração dos veículos que, ao chegar ao terminal, não enfrentam fila. Seja, por outro
lado, �̅� 𝑜 tempo médio de espera na fila, calculado dentro do intervalo de tempo quando ocorre
congestionamento (isso é, haja fila). Quando ocorre fila, o tempo médio no sistema é igual à
soma do tempo na fila e o tempo de descarga. Inversamente, quando não há fila, o tempo no
sistema é igual ao tempo de descarga. Ou seja, o tempo médio no sistema �̅�𝑠𝑦𝑠𝑡, é dado por:
�̅�𝑠𝑦𝑠𝑡 = (1 − 𝛾) (�̅� + 𝑆̅) + 𝛾 𝑆̅ (28)
6. RESULTADOS
Para aplicação do modelo foi desenvolvido um programa em Pascal, em plataforma Delphi
XE7. A Tabela 1 mostra os principais resultados obtidos com a aplicação do modelo, para n
variando de 10 a 20. Os resultados são referenciados à unidade “caixa”. Tais valores são então
divididos por 𝑢 = 464,5 caixas por veículo para transforma-los em “veículos”.

7. CONCLUSÕES E RECOMENDAÇÕES
Nota-se, através da análise da Tabela 1, que a configuração com 𝑛 = 16 posições de recepção
parece satisfatória, com fila média de 7,3 veículos e tempo de espera médio de 0,31 minutos.
Por outro lado, a fila máxima é de 13,8 veículos, que serve de parâmetro básico para definir um
espaço no pátio do terminal destinado a abrigar os caminhões que esperam na fila. Mas
certamente o que traria uma redução apreciável no número de posições de recebimento de
caminhões e de espaço para estacionamento seria reduzir ao máximo o flagrante desequilíbrio
no processo de chegadas, com grande parte dos veículos chegando próximos do fim da janela
de tempo. Tal desequilíbrio indica a necessidade de organizar melhor as chegadas, impondo
horários mais rígidos para os transportadores. De fato, embora a janela de tempo de T=2 horas
para recebimento dos veículos alimentadores já seja, em si, um controle das chegadas, a
dispersão das mesmas ao longo do tempo impõe um aproveitamento pouco satisfatório do
terminal, o que se reflete nos seus custos.
Tabela 1 – Resultados da aplicação do modelo
Número de
posições
Fila média
(veículos)
Fila máxima
(veículos)
Temp. de
espera médio
(h)
Temp. de
espera máximo
(h)
Tempo médio
no sistema (h)
10 12,4 25,3 0,52 1,72 1,21
11 11,5 23,3 0,49 1,59 1,17
12 10,7 21,4 0,45 1,29 1,13
13 9,9 19,4 0,42 1,07 1,08
14 9,1 17,5 0,38 0,88 1,04
15 8,1 15,6 0,34 0,73 1,00
16 7,3 13,8 0,31 0,64 0,96
17 6,5 12,0 0,27 0,52 0,92
18 5,6 10,2 0,24 0,42 0,88
19 4,7 8,5 0,20 0,33 0,85
20 3,9 7,0 0,16 0,26 0,82
Uma possível correção seria dividir a janela de tempo em períodos, em que o caminhão
abastecedor é alocado previamente a uma delas, de modo que tenha de chegar ao terminal dentro
da janela de tempo previamente estabelecida. Devido à variabilidade nas condições externas de
tráfego e de outros fatores, é praticamente impossível definir um horário rígido de chegada.
Mas a alocação de uma janela de tempo menor, específica a cada caminhão, pode melhorar, de
muito, o resultado.
Pode-se concluir que a eficiência e a eficácia de um terminal de cross docking depende, em
larga escala, da organização de sua operação, impondo regras rígidas e colaboração entre todos
os participantes, internos e externos, com destaque para os fornecedores de produtos e os
transportadores. Finalmente, mostramos que um modelo aproximado e não estacionário da fila,
baseado numa representação contínua da variável central, pode fornecer resultados suficientes
para uma análise preliminar do problema. Posteriormente, através de um modelo de simulação,
a análise pode ser aprofundada, levando a valores mais precisos dos resultados.
Agradecimento
Esta pesquisa foi apoiada financeiramente pelo CNPq, Projeto 470899/2013-1.

REFERÊNCIAS BIBLIOGRÁFICAS Agustina, D.; C.K.M. Lee e R. Piplani (2010). A review: Mathematical Models for Cross Docking Planning.
International Journal of Engineering Business Management, v. 2 n. 2, p. 47-54.
Bartholdi III, e K.R. Gue (2004). The Best Shape for a Crossdock. Transportation Science, v. 38, n. 2, p. 235-244.
Boysen, N. e M. Fliedner (2010). Cross Dock Scheduling: Literature Review and Research Agenda. Omega, v.
38, p. 413-422.
Fogliatti, M.C. e N.M.C Mattos (2007). Teoria de Filas. Editora Interciência, Rio de Janeiro, RJ.
Little, J.D.C. and Graves, S.S. (2008). Little’s Law, in Chhajed, D. and Lowe, T.J. (eds.) Building Intuition:
Insights from Basic Operations Management Models and Principles, New York: Springer Science +
Business Media, LLC.
Mulcahy, D. (1994). Warehouse Distribution & Operations Handbook. McGraw-Hill, New York, NY.
Newell, G.F. (1968). Queues with Time-Dependent Arrival Rates I – The Transition Through Saturation, Journal
of Applied Probability, V. 5, pp. 436-451.
Newell, G.F. (1971). Applications of Queueing Theory, London: Chapman and Hall.
Novaes, A.G.; Takebayashi, F. e Briesemeister, R. (2015). Cross Docking em Centros Logísticos de Distribuição
Urbana: Considerações sobre Operação e Modelagem, Transportes, v. 23, n. 1, p. 47-58.
Odoni, A.R. e R. De Neufville (1992). Passenger Terminal Design. Transportation Research A, v. 1, p. 27-35.
Page, E. (1972). Queueing Theory in OR. Butterworths, Londres.
Shi, W.; Shang, J.; Liu, Z. e X. Zuo (2014). Optimal Design of the Auto Parts Supply Chain for JIT Operations:
Sequential Bifurcation Factor Screening and Multi-Response Surface Methodology, European Journal of
Operational Research, v. 236, p. 664-676.
Soltani, R. e S.J. Sadjadi (2010). Scheduling Trucks in Cross-Docking Systems: A Robust Meta-Heuristics
Approach. Transportation Research Part E, v. 46, p. 650-666.
Stephan, K. e Boysen, N. (2011). Cross-docking. Journal of Management Control, v. 22, p. 129-137.
Taniguchi, E.; M. Noritake; T. Yamada e T. Izumitani (1999). Optimal Size and Location Planning of Public
Logistics Terminals. Transportation Research Part E, v. 35, p. 207-222.
Vahdani, B. e M. Zandieh (2010) Scheduling Trucks in Cross-Docking Systems: Robust Meta-Heuristics.
Computers & Industrial Engineering, v. 58, p. 12-24.
Van Belle, J.; P. Valckenaers e D. Cattrysse (2012). Cross-Docking: State of the Art. Omega, v. 40, p. 827-
846.
Vis, I.F.A. e K.J. Roodbergen (2008). Positioning of Goods in a Cross-Docking Environment. Computers &
Industrial Engineering, v.54, p. 677-689.







