Daiane Aparecida Alves
TÉCNICAS DE DETECÇÃO DE FALHAS
EM BARRAS DO ROTOR
NOS MOTORES DE INDUÇÃO TRIFÁSICOS
São João del-Rei, MG
2017
UNIVERSIDADE FEDERAL DE SÃO JOÃO DEL-REI
PRÓ-REITORIA DE PESQUISA
CENTRO FEDERAL DE EDUCAÇÃO
TECNOLÓGICA DE MINAS GERAIS
DIRETORIA DE PESQUISA E PÓS-GRADUAÇÃO
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA – PPGEL

Daiane Aparecida Alves
TÉCNICAS DE DETECÇÃO DE FALHAS
EM BARRAS DO ROTOR
NOS MOTORES DE INDUÇÃO TRIFÁSICOS
Dissertação apresentada à banca examinadora
designada pelo Colegiado do Programa de Pós-
Graduação em Engenharia Elétrica, associação
ampla entre a Universidade Federal de São João
del-Rei e o Centro Federal de Educação
Tecnológica de Minas Gerais, como parte dos
requisitos necessários à obtenção do grau de Mestre
em Engenharia Elétrica.
Orientadora: Prof.ª Doutora Lane Maria Rabelo
Baccarini
Coorientador: Prof. Doutor Paulo César Monteiro
Lamim Filho
São João del-Rei, MG
2017

Dedico este trabalho a todos
que contribuiram
para a sua realização.

Agradecimentos
Agradeço aos meus avós, Maria (In Memoriam) e Davi (In Memoriam), o amor que me
foi dado e por proporcionarem os momentos mais felizes de minha vida.
Aos meus irmãos, Dênis e Maísa, o apoio incondicional e todo o companheirismo.
Aos meus tios, Claudionor e Maria Nazaré, a ajuda e apoio nos momentos mais difíceis.
Agradeço à minha amiga e prima Vanessa a amizade, atenção e companheirismo.
Às minhas grandes amigas, Carol e Débora, os momentos de alegrias, a amizade e os
ensinamentos.
Agradeço aos meus amigos, Márcio e Magda, o carinho, a amizade, os ensinamentos e
todas as experiências compartilhadas.
Ao pessoal do Núcleo de Tecnologia da Informação/UFSJ, o sagrado cafezinho nas
pausas necessárias.
À minha orientadora, Professora Lane, a oportunidade dada, a orientação e o apoio
fundamental durante a realização deste trabalho.
Ao meu coorientador, Professor Paulo, a paciência, os ensinamentos compartilhados e
a orientação durante a elaboração deste trabalho.
Ao professor Fabiano, com suas colaborações fundamentais para o desenvolvimento
deste trabalho.
À Universidade Federal de São João del-Rei e ao Programa de Pós-Graduação em
Engenharia Elétrica, a oportunidade de realizar este trabalho e todo o apoio financeiro.
A todas as pessoas que contribuíram de alguma forma para a realização deste trabalho.
Resumo
Os motores de indução trifásicos, do tipo rotor gaiola de esquilo, são máquinas amplamente
usadas no ambiente industrial, devido às suas características, tais como: robustez;
confiabilidade; facilidade de manutenção; baixo custo de aquisição; e flexibilidade, quanto à
sua aplicação. Entretanto, apesar desses fatores, esses equipamentos estão sujeitos à ocorrência
de falhas ou avarias provocadas por diversas condições impostas à máquina, como tempo, modo
de operação e ambiente hostil de instalação, entre outras. Diante desse contexto, inúmeros
métodos de detecção e diagnóstico de falhas em motores elétricos têm sido desenvolvidos com
o intuito de prever e diagnosticar a ocorrência de defeitos. Assim, auxiliam o setor de
manutenção preditiva, minimizando ou eliminando interrupções não-programadas e,
consequentemente, promovendo a redução de custos na cadeia produtiva. Desta forma, o
presente trabalho propõe novas metodologias de diagnóstico e detecção de falhas em barras do
rotor gaiola, baseadas em duas importantes ferramentas de processamento de sinais: a
Demodulação Empírica e a tradicional Transformada Discreta de Wavelet. Os métodos
desenvolvidos analisam o comportamento da corrente estatórica da máquina, diante da condição
saudável e com defeito, a fim de realizar o diagnóstico de quebras em barras do rotor. Portanto,
sinais de corrente do motor são coletados e então delimitados, a partir da aplicação de um filtro
passa-banda. Na sequência, obtém-se os envelopes desses sinais por meio do uso da
Demodulação Empírica. Em seguida, a Transformada Discreta de Wavelet é utilizada para
decompor e isolar as frequências características de barra quebrada. Assim, usam-se os sinais de
saída da Wavelet para construir os parâmetros de visualização da falha, que difere em cada
metodologia. As técnicas apresentadas nesta pesquisa foram validadas por meio de ensaios
computacionais e testes experimentais, comprovando sua eficiência. Tais métodos exibem um
bom desempenho para a realização do diagnóstico, de forma independente do nível de carga,
sendo métodos não invasivos, de fácil implementação prática, uma vez que requerem a leitura
de sensores presentes na planta industrial.
Palavras-chave: motor de indução trifásico, diagnóstico de falhas, barras quebradas,
demodulação empírica, transformada de Wavelet.

Abstract
Three-phase induction motors, squirrel cage rotor type, are machines widely used in the
industrial environment, due to their characteristics, such as: robustness; reliability; ease of
maintenance; low acquisition cost; and flexibility in its application. However, despite these
factors, these equipments are subject to the occurrence of failures or failures caused by various
conditions imposed on the machine, such as time, mode of operation and hostile installation
environment, among others. In this context, numerous methods of detection and diagnosis of
failures in electric motors have been developed in order to predict and diagnose the occurrence
of defects. Thus, they help the predictive maintenance sector, minimizing or eliminating non-
scheduled interruptions and, consequently, promoting cost reduction in the production chain.
In this way, the present work proposes new methodologies for diagnosis and detection of
failures in cage rotor bars, based on two important signal processing tools: Empirical
Demodulation and the traditional Wavelet Discrete Transform. The developed methods analyze
the behavior of the stator current of the machine, in the face of the healthy and defective
condition, in order to perform the diagnosis of rotor rod breaks. Therefore, motor current signals
are collected and then delimited, from the application of a band-pass filter. In the sequence, the
envelopes of these signals are obtained through the use of Empirical Demodulation. Then, the
Wavelet Discrete Transform is used to decompose and isolate the characteristic frequencies of
a broken bar. Thus, wavelet output signals are used to construct the fault display parameters,
which differs in each methodology. The techniques presented in this research were validated
through computational tests and experimental tests, proving their efficiency. These methods
have a good performance for the diagnosis, independently of the level of load, and non-invasive
methods are easy to implement in practice, since they require the reading of sensors present in
the industrial plant.
Keywords: three-phase induction motor, fault diagnosis, broken bars, empirical demodulation,
Wavelet transform.
vii
Lista de Figuras
Figura 2.1 – Rotor gaiola de esquilo. Fonte: adaptado de Águas (2013)....................................................6
Figura 2.2 – Tipos de rotor gaiola: (a) fabricado e b) fundido. Fonte: retirado de Águas (2013)……........7
Figura 2.3 – Rotor de dupla gaiola. Fonte: adaptado de Gritli et al. (2014)............................................. 8
Figura 2.4 – Rotor com barras quebradas. Fonte: retirado de Foito (2015). ............................................ 8
Figura 3.1 – Representação do espectro de Fourier para a técnica MCSA: (a) condição sem defeito e (b)
com duas barras quebradas......................................................................................................................14
Figura 3.2 – Representação tempo e frequência da WT. Fonte: adaptado de Fanucchi (2014).................14
Figura 3.3 – Exemplo de função Wavelet da família Morlet...................................................................18
Figura 3.4 – Exemplo do processo de decomposição efetuado pela DWT. Fonte: adaptado de Bucher
(2001)......................................................................................................................................................20
Figura 3.5 – Decomposição Wavelet com nível 3 e frequência de amostragem igual à 5 kHz.................21
Figura 3.6 – HT do sinal de corrente x para a obtenção do envelope modulador xH................................24
Figura 3.7 – Exemplo de aplicação da técnica ED ao sinal de corrente x para a obtenção do envelope
modulador xED. ...................................................................................................................................... 27
Figura 4.1 – Transformação do eixo abc para o eixo dq………………………………………………...29
Figura 4.2 – Rotor gaiola com suas respectivas malhas. Fonte: adaptado de Cunha (2006). ................ 31
Figura 4.3 – Representação do circuito RL das barras do rotor gaiola. Fonte: adaptado de Cunha (2006)
……..……………………………………………………………………………………......................32
Figura 4.4 – Representação de quebra na barra k no circuito RL da gaiola do rotor. Fonte: adaptado de
Cunha (2006)...........................................................................................................................................33
Figura 4.5 – Algoritmo de Integração do Modelo Assimétrico por Barras Quebradas. Fonte: retirado de
Baccarini (2005)………………………………………………………………………………………..34
Figura 5.1 – Diagrama das metodologias propostas. .............................................................................. 36
Figura 5.2 – Processo de filtragem: (a) FFT do sinal original e (b) FFT do sinal filtrado.........................37
Figura 5.3 – Aplicação da técnica ED: (a) varredura dos extremos locais e, (b) realocação dos pontos de
mínimos locais entre os extremos superiores….......................................................................................38
Figura 5.4 – Etapas de aplicação da técnica ED: (a) sinal de corrente filtrado e envelope modulador, e
(b) FFT do sinal modulador……………………………………………………………...……………..39
Figura 5.5 – Aplicação da técnica DWT: comparação do sinal filtrado pela DWT e o envelope
moduldor……………………………………………………………………………………………….41
Figura 5.6 – Aplicação da DWT: cálculo da FFT do envelope modulador e do sinal Wavelet…………42
Figura 5.7 – Técnica EDWO: (a) defasamento do sinal de fase b e, (b) padrão geométrico em forma de
órbita construído a partir dos sinais de saída Wavelet………………......................................................42
Figura 5.8 – Técnicas EDWE: cálculo do nível de energia a partir do sinal Wavelet...............................43
Figura 5.9 – Dados simulados. Órbitas dos sinais das corrente Ia e Ib para a velocidade de: (a) 1735 rpm
e (b) 1745 rpm……….…………………………………………………………………………………44

viii
Figura 5.10 – Dados simulados. Órbitas dos sinais das correntes Ia e Ib para a velocidade de: (a) 1755
rpm e (b) 1765 rpm……………………………………………………………………………………..45
Figura 5.11 – Dados simulados. Órbitas dos sinais das corrente Ia e Ib para a velocidade de: (a) 1775
rpm e (b) 1780 rpm……………………………………………………………………………………..45
Figura 5.12 – Dados simulados. Órbita dos sinais das correntes Ia e Ib para a velocidade de: (a) 1785
rpm e (b) 1790 rpm……………………………………………………………………………………..46
Figura 5.13 – Dados simulados. Órbitas dos sinais das correntes Ia e Ib para a velocidade de: (a) 1773
rpm e (b) 1779 rpm. ............................................................................................................................... 47
Figura 5.14 – Dados simulados. Órbitas dos sinais das correntes Ia e Ib para a velocidade de: (a) 1783
rpm e (b) 1787 rpm……………………………………………………………………………………..47
Figura 5.15 – Comprimento da circunferência para cálculo do índice de severidade……......................48
Figura 5.16 – Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob 1735 rpm
…………………………………………………………………………………………………………50
Figura 5.17 – Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob 1745 rpm
…………………………………………………………………………………………………………50
Figura 5.18 – Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob 1755 rpm
…………………………………………………………………………………………………………50
Figura 5.19 – Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob 1765 rpm
…………………………………………………………………………………………………………51
Figura 5.20 – Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob 1775 rpm
…………………………………………………………………………………………………………51
Figura 5.21 – Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob 1780 rpm
…………………………………………………………………………………………………………51
Figura 5.22 – Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob 1785 rpm
…………………………………………………………………………………………………………52
Figura 5.23 – Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob 1790 rpm
…………………………………………………………………………………………………………52
Figura 5.24 – Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob 1773 rpm
…………………………………………………………………………………………………………53
Figura 5.25 – Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob 1779 rpm
…………………………………………………………………………………………………………53
Figura 5.26 – Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob 1783 rpm
…………………………………………………………………………………………………………53
Figura 5.27 – Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob 1787 rpm
……………………….………………………………………………………………………………...54
Figura 6.1 – Testes experimentais: (a) foto da bancada e (b) rotor gaiola com uma barra quebrada.........56
Figura 6.2 – Foto do sistema de medição dos sinais de corrente...............................................................57
Figura 6.3 – Dados reais. Órbita dos sinais das correntes Ia e Ib para a velocidade de: (a) 1735 rpm e (b)
1745 rpm……………………………………………………………………………………………….58
ix
Figura 6.4 – Dados reais. Órbita dos sinais das correntes Ia e Ib para a velocidade de: (a) 1755 rpm e (b)
1765 rpm .................................................................................................................................................58
Figura 6.5 – Dados reais. Órbita dos sinais das correntes Ia e Ib para a velocidade de: (a) 1775 rpm e (b)
1780 rpm……………………………………………………………………………………………….59
Figura 6.6 – Dados reais. Órbita dos sinais das correntes Ia e Ib para a velocidade de: (a) 1785 rpm e
(b) 1790 rpm............................................................................................................................................59
Figura 6.7 – Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob 1735 rpm.........60
Figura 6.8 – Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob 1745 rpm........61
Figura 6.9 – Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob 1755 rpm.........61
Figura 6.10 – Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob 1765 rpm.......62
Figura 6.11 – Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob 1775 rpm......62
Figura 6.12 – Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob 1780 rpm.......62
Figura 6.13 – Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob 1785 rpm.......63
Figura 6.14 – Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob 1790 rpm.......63

x
Lista de Tabelas
Tabela 5.1 – Banda de Frequência e Coeficientes da DWT para a faixa de interesse. ................ ..........41
Tabela 5.2 – Especificações dos motores de indução trifásicos usados nos ensaios numéricos. ....... ....43
Tabela 5.3 – Dados para o motor 5HP: carga desenvolvida (% da nominal), velocidade nominal,
escorregamento e frequência de modulação............................................................................................44
Tabela 5.4 – Dados para o motor de 500 HP: carga desenvolvida (% da nominal), velocidade nominal,
escorregamento e frequência de modulação............................................................................................46
Tabela 5.5 – Dados simulados obtidos para o motor de 5HP: carga desenvolvida (%), escorregamento,
número de ciclos e índice de falha para as condições especificadas. ................................................. ....49
Tabela 5.6 – Dados simulados obtidos para o motor de 500HP: carga desenvolvida (%), escorregamento,
número de ciclos e índice de falha para as condições especificadas. ..................................................... 49
Tabela 6.1 – Dados reais obtidos para o motor de 5 HP: carga (%), escorregamento, número de ciclos e
índice de severidade da falha para condições especificadas. ................................................................. 60

xi
Lista de Siglas
CA – Corrente Alternada
CC – Corrente Contínua
IEEE – Instituto de Engenheiros Eletricistas e Eletrônicos
EPRI – Instituto de Pesquisa em Engenharia Elétrica
LAMET – Laboratório de Máquinas e Transformadores
MITs – Motores de Indução Trifásicos

xii
Lista de Símbolos
𝑓𝑒𝑠 Frequência de escorregamento em Hertz
𝐼𝑀 Corrente máxima em Ampères
𝑓 Frequência de alimentação em Hertz
𝑡 Instante de tempo em segundos
𝑖𝑏 Corrente modulada em Ampères
𝛽 Índice de modulação
𝜔 Velocidade angular em radiano por segundos
𝜔𝑜 Velocidade angular modulada em radiano por segundo
𝑛𝑏 Número total de barras quebradas adjacentes
𝑁𝑏 Número total de barras existentes no rotor
𝑓𝑜 Frequência de modulação em Hertz
𝑠 Escorregamento
𝑓𝑏𝑟 Frequência da falha de barra quebrada em Hertz
𝑘 Constante auxiliar para o cálculo das frequências de falhas
𝑁 Números de amostras
∆𝑓 Resolução em frequência em Hertz
𝑇𝑚 Tempo de amostragem em segundos
𝑓𝑠 Frequência de amostragem em Hertz
𝜓 Função Wavelet
𝑐𝑗 Coeficiente de aproximação Wavelet em Hertz
𝑑𝑗 Coeficiente de detalhe Wavelet em Hertz
𝐸𝑐 Energia em cada nível de decomposição
𝐸 Energia total da Wavelet
𝑔[𝑛] Filtro passa alta
ℎ[𝑛] Filtro passa baixa
Φ Função escala
𝑏 Coeficiente de aproximação ou detalhe em cada ponto genérico discreto
𝐻 Energia normalizada da Wavelet

xiii
⨂ Operação de convolução
xH Amplitude do envoltório de Hilbert em Ampères
𝑃 Principal Valor de Cauchy
x Sinal genérico portador em Ampères
xED Amplitude do envoltório de Demodulação Empírica em Ampères
𝑥𝑎 𝑥𝑏 𝑥𝑐 Variáveis genéricas do sistema trifásico abc
𝑥𝑞 𝑥𝑑 𝑥0 Variáveis genéricas nas coordenadas 𝑞𝑑0
𝜃 Ângulo de defasamento entre os eixos abc e 𝑞𝑑0
𝜔 Velocidade angular de referência em radiano por segundos
𝜔𝑒 Velocidade síncrona em radiano por segundos
𝜔𝑟 Velocidade rotórica em radiano por segundos
𝑖𝑑𝑟 𝑖𝑞𝑟 Corrente do rotor de eixo direto e quadratura em Ampères
𝑖𝑑𝑠 𝑖𝑞𝑠 Corrente do estator de eixo direto e quadratura em Ampères
𝑣𝑑𝑟 𝑣𝑞𝑟 Tensão do rotor de eixo direto e quadratura em Volts
𝑣𝑑𝑠 𝑣𝑞𝑠 Tensão do estator de eixo direto e quadratura em Volts
𝜆𝑑𝑟 𝜆𝑞𝑟 Fluxo concatenado do rotor em Webers
𝜆𝑑𝑠 𝜆𝑞𝑠 Fluxo concatenado do estator em Webers
𝐿𝑙𝑠 Indutância de dispersão do estator em Henry
𝐿𝑙𝑟 Indutância de dispersão do rotor em Henry
𝐿𝑀 Indutância de magnetização em Henry
𝑟𝑟 Resistência do rotor em Ohm
𝑟𝑠 Resistência do estator em Ohm
𝑇𝑒 Torque eletromagnético em Newton por metro
𝑖𝑟𝑛 Corrente de malha do rotor em Ampères
Rb Resistência da barra do rotor em Ohm
Re Resistência do anel de curto-circuito em Ohm
Lb Indutância da barra rotórica em Henry
Le Indutância do anel de curto-circuito em Henry
𝑖𝑒 Corrente de malha do anel de curto-circuito em Ampères

xiv
𝑇𝑑𝑞 Matriz de transformação das correntes rotóricas
t_sim Tempo total de simulação em segundos
h Passo de integração
Ia Corrente de alimentação fase a em Ampères
Ib Corrente de alimentação fase b em Ampères
𝐼 Índice de severidade
𝐿𝑟𝑒𝑓 Comprimento de referência da órbita (condição sem defeito)
𝐿 Comprimento da órbita (com falha)
𝑝 Par de pólos

xv
SUMÁRIO
CAPÍTULO 1 ............................................................................................................................ 1
Introdução ................................................................................................................................. 1
CAPÍTULO 2 ............................................................................................................................ 6
Aspectos relacionados ao rotor gaiola .................................................................................... 6
2.1 Falhas nas barras do rotor ................................................................................................. 9
2.2 Conclusão .......................................................................................................................... 11
CAPÍTULO 3 .......................................................................................................................... 12
Técnicas de Detecção e Diagnóstico de Falhas em MITs .................................................... 12
3.1 Análise da Corrente do Estator ....................................................................................... 12
3.2 Transformada de Wavelet ............................................................................................... 15
3.3 Técnicas de Demodulação de Sinais ................................................................................ 22
3.3.1 Transformada de Hilbert....................................................................................... 23
3.3.2 Transformada de Hilbert-Huang .......................................................................... 25
3.3.3 Demodulação Empírica.......................................................................................... 25
3.4 Conclusão ......................................................................................................................... 27
CAPÍTULO 4 .......................................................................................................................... 28
Modelo Matemático do Motor de Indução ........................................................................... 28
4.1 Modelo Assimétrico de Barras do Rotor ........................................................................ 30
4.2 Conclusão .......................................................................................................................... 35
CAPÍTULO 5 .......................................................................................................................... 36
Metodologias Propostas ......................................................................................................... 36
5.1 Resultados da metodologia EDWO ................................................................................. 44
5.1.1 Resultados da metodologia EDWO para o motor de 500 HP ............................ 46
5.1.2 Relação do número de ciclo e índice de severidade da falha .............................. 47
5.2 Resultados da metodologia EDWE ................................................................................. 49
5.2.1 Resultados da metodologia EDWE para o motor de 500 HP ............................. 52
5.3 Conclusão .......................................................................................................................... 54
CAPÍTULO 6 .......................................................................................................................... 56
Ensaios Experimentais ........................................................................................................... 56
6.1 Descrição da Bancada Experimental .............................................................................. 56
6.2 Resultados experimentais da metodologia EDWO ........................................................ 57
6.3 Resultados experimentais da metodologia EDWE ........................................................ 60
6.4 Conclusão .......................................................................................................................... 63

xvi
CAPÍTULO 7 .......................................................................................................................... 65
Conclusões ............................................................................................................................... 65
7.1 Publicações ........................................................................................................................ 66
Referências Bibliográficas ..................................................................................................... 67
Apêndice A .............................................................................................................................. 74
CAPÍTULO 1
Introdução
Os motores de indução trifásicos (MITs) são elementos chaves, amplamente
empregados no setor industrial, devido à sua robustez, confiabilidade e baixo custo. Essas
máquinas são utilizadas em diferentes tipos de indústrias e em diversas aplicações tais como:
compressores, bombas, sopradores, entre outras. De acordo com Ferreira et al. (2016) e
Espinosa et al. (2008), os motores de indução representam cerca de 90% do total de
equipamentos instalados na indústria e são responsáveis por mais de 60% do consumo de
energia do setor.
Apesar das diversas vantagens apresentadas por esse tipo de máquina, os motores de
indução estão propensos a falhas elétricas e mecânicas, que são originadas pelos seguintes
fatores: tempo e modo de operação; condições ambientais, às quais a máquina está inserida; e
ainda defeitos intrínsecos provenientes do seu processo de fabricação, entre outros (Ying Xie,
2012). De um modo geral, as principais falhas dos motores de indução podem ser classificadas
em: i) falhas no estator (resultantes da abertura ou de curto-circuito em determinada fase); ii)
falhas no rotor (quebra nas barras ou anéis do rotor); iii) irregularidades no entreferro
(estática/dinâmica); e iv) falhas no rolamentos e transmissão (Thakur et al., 2016; Zhang et al.,
2011).
Segundo dados publicados pelo Institute of Electrical and Eletronics Engineers, Inc.
(IEEE), do total de falhas ocasionadas nos MITs, cerca de 42% correspondem aos rolamentos,
38% estão relacionadas ao enrolamento do estator, 10% referem-se ao rotor e os outros 10%
estão associadas à transmissão e irregularidades no entreferro. Em um estudo semelhante,
realizado pelo Eletric Power Research Institute (EPRI), constatou-se que: i) os rolamentos são
responsáveis por 40% do total de incidência de falhas nos motores de indução; ii) 28%
correspondem ao enrolamento do estator; iii) 8% estão associadas ao rotor; e iv) 24% referem-
se aos outros tipos de falhas (Radecki et al., 2016).
Independentemente desta classificação as falhas podem acarretar danos ao sistema de
alimentação e ao próprio motor. Entre estes, pode-se citar: tensões e correntes de linha
desbalanceadas; aumento do nível de vibração; queda do conjugado médio; aumento das perdas
e redução do rendimento; e aquecimento excessivo.
2
Quebras nas barras do rotor constituem a terceira maior causa de ocorrência de falhas
em motores. Esse tipo de defeito é consequência de uma combinação de estresses externo e
interno, motivados por diversos fatores (Pezzani et al., 2014; Fiser et al., 2013; Lu et al., 2013).
Nos motores de indução de média tensão (com faixa de tensão de 2,3 a 13,8 kVolts) há uma
maior incidência de barras quebradas, devido às elevadas e extensas tensões térmicas, que
ocorrem durante seu processo de partida (Zhang et al., 2011; Lu et al., 2013).
A presença de barras quebradas induz o surgimento de vibrações no eixo da máquina e,
consequentemente, provoca excentricidades no entreferro e desgaste prematuro nos rolamentos.
Além disso, o rompimento de uma barra pode levar à fratura progressiva das demais, elevando
o nível de vibração, podendo acarretar falhas prematuras e aumento do consumo de energia
(Valles-Novo et al, 2015). Tais efeitos reduzem a vida útil da máquina e comprometem o bom
funcionamento da cadeia produtiva. Desta maneira, torna-se necessário efetuar o
monitoramento do comportamento do motor, a fim de detectar falhas e evitar paradas não
programadas, permitindo minimizar custos de manutenção e garantir a confiabilidade e
eficiência do processo produtivo.
O monitoramento contínuo da condição da máquina para a detecção e diagnóstico de
falhas trata-se de uma importante parte do setor de manutenção, sendo particularmente
realizado na aplicação da preditiva, por meio de diferentes técnicas de monitorização que, em
sua maioria, estão associadas à inspeção dos parâmetros do motor, tais como: corrente do
estator, fluxo magnético e análise de vibração (Zhang et al., 2011).
A análise do sinal da corrente do motor (Motor Current Signature Analysis- MCSA) é
a técnica mais utilizada no diagnóstico de barras quebradas em motores de indução. Esse
método faz uso da ferramenta de processamento de sinais denominada Transformada Rápida
de Fourier (Fast Fourier Transform-FFT). A FFT consiste na versão rápida da Transformada
de Fourier (Fourier Transform-FT) e possibilita a visualização de um sinal temporal no domínio
da frequência para que se possa identificar e acompanhar a evolução de falha, por meio de suas
componentes espectrais (Gaeid et al., 2011; Mata-Castrejón et al., 2015).
A técnica MCSA trata-se de um método não-invasivo, de fácil implementação, em que
é necessária somente a leitura da corrente do estator referente à uma fase de alimentação. Sendo
assim, esse método é apropriado para o monitoramento, em tempo real, do motor sob operação
em regime permanente. Porém, apesar das inúmeras vantagens exibidas pelo método clássico
MCSA, algumas dificuldades são relatadas na literatura quanto à sua aplicação, tais como: a
dependência do nível de carga da máquina e da relação sinal-ruído (Signal-to-Noise Ratio-

3
SNR), e ainda a necessidade de manter o nível de operação com velocidade constante, a fim de
obter uma boa precisão na análise via FFT (Mabrouk et al., 2015; Singh et al., 2015; Naha et
al., 2016). Além disso, para condições de operação em baixo escorregamento, o método MCSA
requer uma boa resolução espectral, fato este que, consequentemente, irá exigir um maior tempo
de aquisição e mais espaço de memória disponível. Devido a isto, a análise de Fourier é limitada
quanto à aplicação na realização do monitoramento experimental, contínuo e em grande escala,
tendo em vista a quantidade de dados a serem armazenados e o custo computacional exigido.
Como a relação entre a resolução em frequência e o tempo de aquisição é inversamente
proporcional e conflitante, isso é um outro fator limitante quanto ao uso da análise de Fourier e
do espectro de frequência. No entanto, diversas técnicas vêm sendo desenvolvidas com o intuito
de solucionar tal problema, de forma a promover a melhora da resolução espectral, sem que
haja a necessidade do aumento do tempo de aquisição. Entre tais métodos propostos têm-se: a
técnica Zoom-FFT (ZFFT), apresentada por Dahi et al. (2015), Kia et al. (2013), Zarader et al.
(1997) e Capolino et al. (2007); os métodos de covariância máxima (Pons-Llinares et al., 2014;
Bellini et al., 2006), a transformada Zoom-Chirp (Zoom-Chirplet Transform- ZCT), proposta
por Wang et al. (2011); e o algoritmo Multiple Signal Classification (MUSIC), desenvolvido
por Kia et al. (2013), Wang et al. (2011) e Capolino et al. (2007). Entretanto, alguns desses
métodos podem apresentar um elevado custo computacional diante de uma boa resolução
espectral obtida, tal como mostrado em Capolino et al. (2007) e Bellini et al. (2006).
Em diversos trabalhos tem sido destacada a dificuldade de utilização do método clássico
MCSA em aplicações, no qual a carga da máquina é variável e pulsante, tal como ocorre em
acionamentos de moinhos, elevadores e compressores (Espinosa et al., 2008), ou seja, a análise
de Fourier consiste em uma técnica não aplicável a sinais com sequência de tempo não
estacionária. A não estacionariedade é uma característica comum de sinais reais originados dos
motores de indução. Diante desse contexto, promoveu-se uma melhoria na FFT, criando assim
uma nova ferramenta de processamentos de sinais denominada Transformada de Curta Duração
(Short-Time Fast Fourier Transform - STFFT). A Short-Fourier possibilita a investigação
espectral de sinais não estacionários, por meio do uso da técnica de janelamento, dando origem
a segmentos limitados do sinal no tempo (Pons-Llinares et al., 2014; Georgoulas et al., 2014).
Recentemente, inúmeras pesquisas têm sido propostas com o objetivo de desenvolver
técnicas de detecção e diagnóstico de falhas mais eficazes e práticas, tal como é apresentado
em Naha et al. (2016), Xu et al. (2013), Sapena-Bãno et al. (2014), Filho et al. (2014) e Hou et
al. (2012). Dessa maneira, diversos métodos de processamentos de sinais vêm sendo

4
amplamente investigados, pesquisados e explorados, como as metodologias clássicas de
filtragem e as técnicas associadas à “decomposição” e “demodulação”, com o intuito de
melhorar o desempenho de tais ferramentas.
O processo de decomposição permite separar uma sequência de tempo original em
diversas formas de ondas com diferentes conteúdos de frequência, de forma que é possível
investigar e avaliar de maneira mais detalhada apenas sinais que contenham a informação da
falha, sendo bastante similar à operação de filtragem. Metodologias baseadas na decomposição
têm sido abordadas em Keskes et al. (2013), Keskes et al. (2015), Faiz et al. (2014), Valles-
Novo et al. (2015) e Georgoulas et al. (2014), tal como a clássica Transformada de Wavelet
(Wavelet Transform-WT) e a Decomposição do Modo Empírico (Empirical Mode
Decomposition-EMD). A WT e a EMD apresentam um bom desempenho para análise de sinais
não estacionários.
Em geral, as componentes de falha podem não estar nitidamente visíveis em um sinal
porque os conteúdos de frequência, presentes em determinada sequência de tempo, transportam
diversas informações que podem estar relacionadas à falha ou não, o que dificulta ou ainda
mascara a identificação da frequência real da falha, durante a respectiva análise. Nesse contexto,
a demodulação de sinais tornou-se uma operação fundamental em diversas situações,
proporcionando uma visualização mais clara do componente de falha, pela eliminação de
características indesejadas e não úteis.
O processo de demodulação promove a construção de uma sequência de tempo
denominada sinal modulador ou envelope que estão associadas às frequências de falha (Sapena-
Bãno et al., 2015; Nemec et al., 2010). Nesses sinais de tempo modulados, as energias
provenientes do conteúdo de frequência da falha encontram-se mais concentradas, o que facilita
a investigação do sinal. As técnicas mais comuns e clássicas de demodulação consistem nos
operadores de energia (Climent-Alarcon et al., 2014; Bessam et al., 2015) e na clássica
Transformada de Hilbert (Hilbert Transform-HT), abordada em Hamdad et al. (2015) e Sapena-
Banõ et al. (2015).
De maneira geral, o emprego de métodos de decomposição e demodulação estão
relacionados ao uso de duas ou mais metodologias de processamento de sinais, tal como
proposto por Georgoulas et al. (2014). De fato, a ideia de “integração’’ ou “junção” de tais
técnicas de decomposição e demodulação têm se tornado foco de estudos de diversos trabalhos
científicos na área de detecção e diagnóstico de falhas em motores elétricos (Bessam et al.,
2015; Hamdad et al., 2015; Sapena-Banõ et al., 2015; Du et al., 2012). Por essa razão e levando-
5
se em consideração a importância de efetuar o diagnóstico de barras quebradas em seu estágio
inicial, surge a motivação desta dissertação, em que duas novas abordagens alternativas ao
método tradicional MCSA são apresentadas, com o intuito de superar as limitações exibidas
por este. Dessa maneira, são propostas novas metodologias de detecção e diagnóstico de
quebras em barras do rotor gaiola, baseadas na junção entre duas importantes ferramentas de
processamento de sinais, a Demodulação Empírica (Empirical Demodulation-ED) e a clássica
Transformada Discreta de Wavelet (Discrete Wavelet Transform-DWT). Uma vez que as
técnicas desenvolvidas efetuam a análise apenas no domínio do tempo, elas mostraram ter baixa
sensibilidade ao tempo de aquisição, diante da situação de baixo escorregamento da máquina.
Os métodos propostos foram validados, a partir de dados coletados nos ensaios realizados em
uma bancada experimental com um motor real operando com diferentes níveis de carga sob a
condição saudável e com uma barra quebrada.
Além deste presente capítulo, a dissertação está dividida em mais seis capítulos,
organizados conforme descrito a seguir.
No Capítulo 2, apresentam-se os conceitos pertinentes aos tipos de rotor gaiola, bem
como descrevem-se as origens, efeitos e causa da falha por barras quebradas nos motores de
indução. Além disso, efetua-se uma formulação matemática com o intuito de demonstrar o
aparecimento dos componentes de modulação.
No Capítulo 3, descrevem-se as tradicionais técnicas de detecção e diagnósticos de
falhas em motores de indução relatadas na literatura. E ainda, apresentam-se as principais e
importantes metodologias de demodulação e decomposição de sinais.
No Capítulo 4, detalha-se o modelo assimétrico por barras quebradas, proposto por
Baccarini (2005). E ainda apresenta-se o fluxograma referente ao algoritmo de integração do
modelo.
No Capítulo 5, desenvolvem-se as metodologias empregadas para a construção do
presente trabalho e, além disso, efetua-se a análise dos dados obtidos a partir dos ensaios
computacionais.
No Capítulo 6, tem-se a descrição da bancada de testes experimentais realizados,
assumindo a condição saudável e com uma barra quebrada. Em seguida, realiza-se a discussão
e análise acerca dos resultados obtidos.
No Capítulo 7, apresentam-se as devidas conclusões quanto ao desenvolvimento das
metodologias propostas. Além disso, detalha-se algumas sugestões para trabalhos futuros.
CAPÍTULO 2
Aspectos relacionados ao rotor gaiola
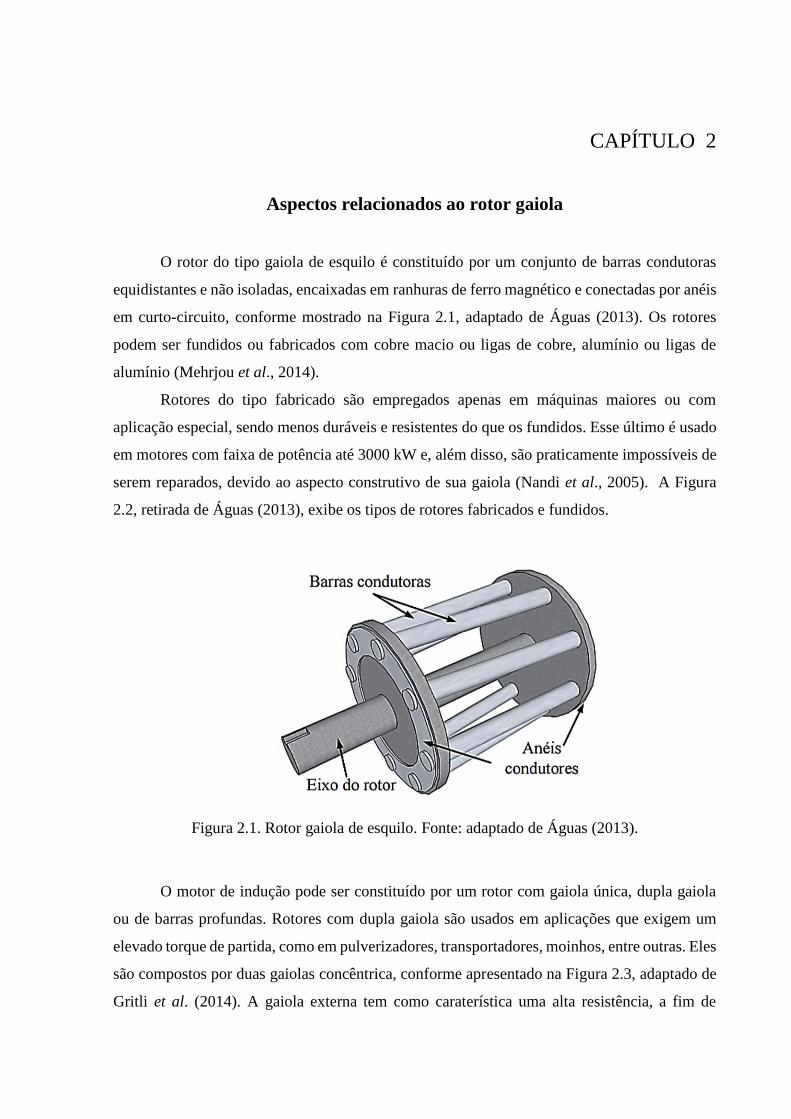
O rotor do tipo gaiola de esquilo é constituído por um conjunto de barras condutoras
equidistantes e não isoladas, encaixadas em ranhuras de ferro magnético e conectadas por anéis
em curto-circuito, conforme mostrado na Figura 2.1, adaptado de Águas (2013). Os rotores
podem ser fundidos ou fabricados com cobre macio ou ligas de cobre, alumínio ou ligas de
alumínio (Mehrjou et al., 2014).
Rotores do tipo fabricado são empregados apenas em máquinas maiores ou com
aplicação especial, sendo menos duráveis e resistentes do que os fundidos. Esse último é usado
em motores com faixa de potência até 3000 kW e, além disso, são praticamente impossíveis de
serem reparados, devido ao aspecto construtivo de sua gaiola (Nandi et al., 2005). A Figura
2.2, retirada de Águas (2013), exibe os tipos de rotores fabricados e fundidos.
Figura 2.1. Rotor gaiola de esquilo. Fonte: adaptado de Águas (2013).
O motor de indução pode ser constituído por um rotor com gaiola única, dupla gaiola
ou de barras profundas. Rotores com dupla gaiola são usados em aplicações que exigem um
elevado torque de partida, como em pulverizadores, transportadores, moinhos, entre outras. Eles
são compostos por duas gaiolas concêntrica, conforme apresentado na Figura 2.3, adaptado de
Gritli et al. (2014). A gaiola externa tem como caraterística uma alta resistência, a fim de

7
permitir um elevado torque de partida. Enquanto que a gaiola interna é construída para possuir
uma baixa resistência, de forma a garantir um bom desempenho em condições nominais. Assim,
devido às suas características construtivas, durante o processo de arranque desse tipo de
máquina, a gaiola interna será negligenciada, sendo a externa responsável pelo aumento do
nível de torque e pela rápida diminuição da corrente de partida. Entretanto, quando o sistema
atinge a condição de regime permanente, a corrente irá fluir principalmente para a gaiola
interna.
(a) (b)
Figura 2.2. Tipos de rotor gaiola: (a) fabricado e b) fundido. Fonte: retirada de Águas (2013).
Motores com rotor gaiola com barras profundas apresentam um aspecto construtivo
semelhante aos de gaiola única. Porém, as barras que o compõem possuem uma considerável
profundidade. Esse tipo de motor tem excelentes características de partidas, similares à dos
motores de dupla gaiola.
Os formatos em barras profundas ou de dupla gaiola são utilizados para se obter um alto
nível de torque de partida, necessário para o arranque da máquina (Mehrjou et al., 2014;
Mehrjou et al., 2015).
A ocorrência de quebras nas barras do rotor não provoca sintomas imediatos. Porém, a
presença desse tipo de defeito ocasiona o aparecimento de falhas secundárias que podem evoluir
e causar efeitos graves à máquina. A Figura 2.4, retirada de Foito (2015), apresenta barras
quebradas no rotor de um motor de indução.

8
Figura 2.3. Rotor de dupla gaiola. Fonte: adaptado de Gritli et al. (2014).
Figura 2.4. Rotor com barras quebradas. Fonte: retirada de Foito (2015).
Na seção seguinte serão abordados conceitos pertinentes relacionados às falhas nas
barras do rotor, tais como origem e efeitos associados a esse tipo de problema.
9
2.1 Falhas nas barras do rotor
O aparecimento de quebras nas barras do rotor gaiola de esquilo é consequência de uma
série de esforços que podem ser classificados em (Mehrjou et al., 2015; Nandi et al., 2005): i)
térmicos: ocasionados por sobrecarga e desequilíbrios térmicos; pontos quentes ou perdas
excessivas; ii) magnéticos: forças e ruídos eletromagnéticos; desequilíbrio da tração magnética;
e vibração; iii) dinâmicos: forças centrífugas, tensões cíclicas e tensões dinâmicas, resultantes
do torque de eixo; iv) ambientais: contaminação por abrasão do material do rotor, devido
principalmente a produtos químicos e umidade; e v) mecânicas: lâminas soltas; partes fatigadas;
falhas no rolamento, entre outras.
Diante de tais situações, a máquina pode continuar operando. Entretanto, a presença de
barra quebrada, podem ocasionar: i) arcos elétricos: originado no meio da fratura da barra
quebrada ou trincada, acarretando um sobreaquecimento que irá acelerar o desenvolvimento da
falha; ii) novas fraturas: provocadas por esforços mecânicos e elevadas correntes impostas nas
barras adjacentes; e, por último, iii) solturas de barras quebradas: devido à ação de forças
centrífugas que atuam no rotor, podendo danificar fisicamente as demais barras, os
enrolamentos do estator e também o circuito magnético.
O efeito de quebra nas barras do rotor produz uma distorção do fluxo magnético que
leva à origem de um campo magnético que gira a uma frequência de escorregamento (𝑓𝑒𝑠), em
sentido contrário ao da rotação do rotor. Esse campo irá atravessar o enrolamento do estator e
induzirá harmônicos na corrente, que podem ser observados em uma frequência igual a (2𝑓𝑒𝑠)
do lado da componente fundamental (Cusidó et al., 2008).
Para fins de demonstração matemática, considere uma máquina de indução sob condição
ideal, alimentada por um sistema trifásico e equilibrado. As correntes de fase do motor
apresentam comportamento puramente senoidal e podem ser descritas de acordo com a Eq.
(2.1), na qual:
𝑖(𝑡) = 𝐼𝑀 cos(𝜔𝑡) = 𝐼𝑀 cos(2𝜋𝑓𝑡) (2.1)
Em que:
𝐼𝑀 é a amplitude máxima da corrente do motor, dada em Ampères;

10
𝑓 e 𝑡 referem-se, respectivamente, à frequência de alimentação do motor (Hz) e ao
instante de tempo (s).
Devido à existência do distúrbio periódico, ocasionado pela quebra da barra do rotor em
um motor sob velocidade constante, a amplitude da corrente em cada fase será modulada de
acordo com a frequência característica da falha ( 𝑓𝑜), sendo representada pela Eq. (2.2):
𝑖𝑏(𝑡) = 𝑖(𝑡)[1 + 𝛽 cos(𝜔𝑜𝑡)] (2.2)
Sendo que:
o índice de modulação 𝛽 é determinado pela Eq. (2.3), na qual a variável 𝑛𝑏 refere-
se ao número de barras quebradas adjacentes e 𝑁𝑏 consiste no número total de barras
existentes no rotor;
𝜔𝑜 refere-se à velocidade angular modulada, dada pela Eq. (2.4).
𝛽 ≈𝑛𝑏
𝑁𝑏
(2.3)
𝜔𝑜 = 2𝜋𝑓𝑜 (2.4)
Dessa forma, efetuando-se a substituição da Eq. (2.1) na Eq. (2.2), têm-se a nova
corrente do motor, após a ocorrência da falha, dado por (Puche-Panadero et al., 2009):
𝑖𝑏(𝑡) = 𝐼𝑀𝑐𝑜𝑠𝜔(𝑡)[1 + 𝛽 cos(𝜔𝑜𝑡)] (2.5)
Realizando-se as devidas multiplicações, tem-se que:
Portanto, de acordo com a Eq. (2.6), diante da presença da barra quebrada, têm-se o
aparecimento de duas componentes de bandas laterais que são originadas devido à modulação
na corrente do estator, provocada pela existência da falha.
𝑖𝑏(𝑡) = 𝐼𝑀𝑐𝑜𝑠𝜔(𝑡) + 𝛽𝐼𝑀2
[cos ((𝜔 − 𝜔𝑜)𝑡) + cos ((𝜔 + 𝜔𝑜)𝑡) ] (2.6)

11
2.2 Conclusão
No presente capítulo foram apresentados inicialmente aspectos relacionados ao rotor
gaiola do motor de indução trifásico, tais como: características construtivas e tipos de gaiolas
existentes. Em seguida, descreveu-se a falha por barras quebradas, citando a origem destas e os
efeitos ocasionados pela presença desse tipo de defeito. Realizou-se ainda o equacionamento
matemático, a fim de demonstrar a modulação provocada à corrente do estator, diante da
ocorrência desse tipo de falha.
CAPÍTULO 3
Técnicas de Detecção e Diagnóstico de Falhas em MITs
O monitoramento das condições de operação do motor, em geral, pode ser realizado por
meio de três importantes etapas: aquisição de dados, processamento e análise dos sinais. A
primeira etapa consiste em mensurar parâmetros que estão associados ao comportamento da
máquina, tais como: corrente/tensão, vibração, fluxo magnético, entre outros. Normalmente, a
leitura de tais sinais é efetuada por meio da aplicação de sensores ou transdutores instalados no
motor. Em seguida, executa-se o processamento de tais sinais medidos, com o intuito de obter
a assinatura da condição da máquina, sob a ausência e presença da falha. Nessa etapa,
importantes técnicas de processamentos de sinais são aplicadas, a fim de proporcionar uma
melhor visualização da falha. Por último, realizam-se o monitoramento e as análises de tais
assinaturas, para identificar a presença de uma possível falha.
Dentre os inúmeros métodos de processamentos de sinais aplicados à detecção e
diagnóstico de falhas, propostos na literatura, pode-se destacar: a WT (Xingzhi et al., 2013;
Capolino et al., 2009), a STFT (Su et al., 2007) e a HT (Cui et al., 2007), entre outros.
Neste capítulo serão detalhadas algumas metodologias de detecção e diagnóstico,
aplicadas aos motores de indução, dando ênfase para a Transformada de Wavelet e a
Demodulação Empírica, que foram empregadas no desenvolvimento do presente trabalho.
3.1 Análise da Corrente do Estator
A tradicional técnica de detecção de falhas MCSA baseia-se na decomposição espectral
da corrente do estator que irá transmitir a informação da falha, por meio do uso da ferramenta
de processamentos de sinais, denominada Transformada Rápida de Fourier.
Na presença de barras quebradas há o surgimento de modulações na amplitude da
corrente e, devido a isso, ocorre o aparecimento das componentes espectrais de bandas laterais
ao redor da componente fundamental. Essas componentes de bandas laterais consistem na
frequência de falha, representadas pela Eq. (3.1), na qual as constantes s e f referem-se,
respectivamente, ao escorregamento e frequência de alimentação, sendo k um número inteiro.

13
𝑓𝑏𝑟 = (1 ± 2𝑠𝑘) 𝑓 (3.1)
Dessa maneira, por meio do uso da FFT, a MCSA permite a observação dos
componentes harmônicos relacionados às frequências de modulação e exibe também a energia
associada a cada harmônico, de tal forma que seja possível distinguir pela variação de energia
a presença de defeito no sistema.
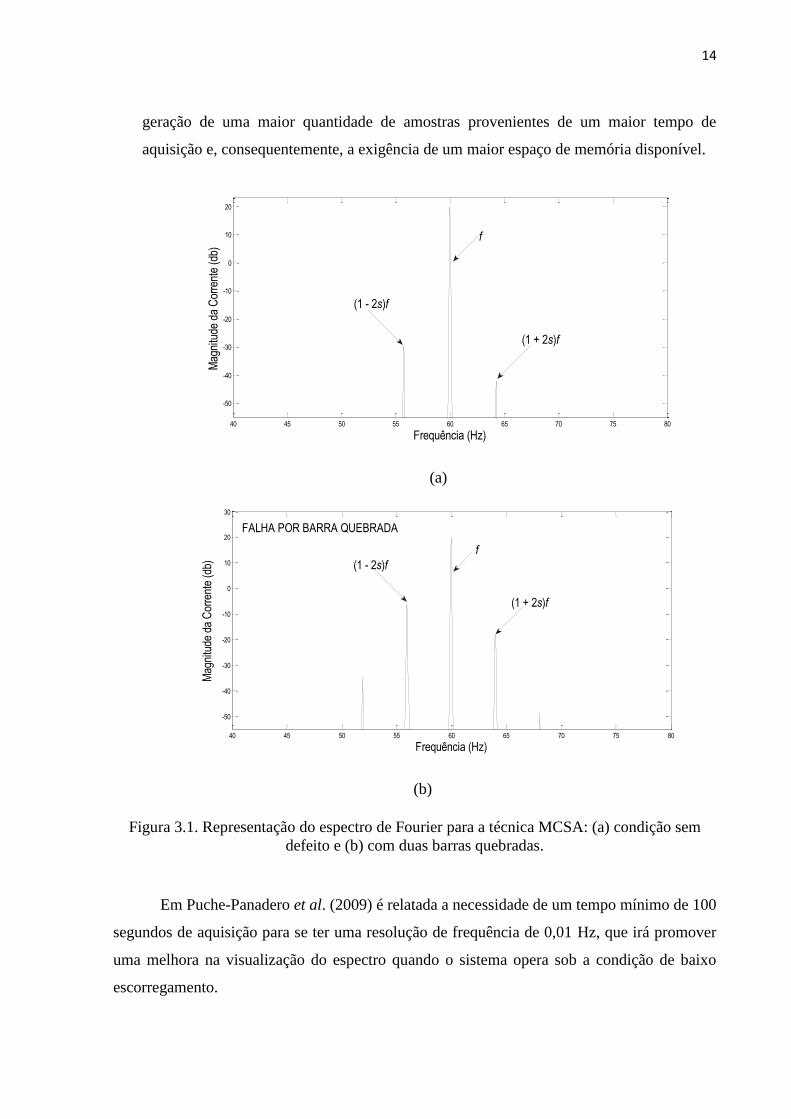
A Figura 3.1 mostra a representação do espectro de Fourier obtido a partir de dados
computacionais gerados sob a condição sem defeito e com duas barras quebradas, assumindo a
velocidade de 1735 rpm para um motor de 4 polos.
Nota-se que, para as condições analisadas, há o surgimento de duas componentes de
frequência de bandas laterais em (1 ± 2𝑠)𝑓. A componente (1 − 2𝑠)𝑓 está relacionada à
modulação provocada pela quebra na barra do rotor, ou ainda, devido à assimetria inerente à
máquina, tal como imperfeições originadas no processo de fabricação, enquanto a componente
(1 + 2𝑠)𝑓 refere-se à oscilação da velocidade. Dessa maneira, mesmo diante da condição sem
defeito, visualizada na Figura 3.1a, tem-se o surgimento de uma componente de banda lateral
esquerda devido à assimetria inerente. Porém, tal como é relatado na literatura, se a diferença
de amplitude entre a componente fundamental e as frequências de bandas laterais for menor
que 45 dB é diagnosticado a presença de barras quebradas, conforme mostra a Figura 3.1b.
Apesar de sua eficiência frente ao diagnóstico de falhas, o método clássico MCSA
apresenta algumas limitações relatadas na literatura. Pode-se citar, entre estas, a dificuldade em
executar um diagnóstico correto quando o motor opera sob condição de baixo escorregamento,
ou seja, operação com carga reduzida. Isso porque a análise de Fourier apresenta algumas
desvantagens em sua aplicação, tais como (Douglas et al., 2005; Cabanas, 2011):
i. efeito do vazamento espectral, que é ocasionado pelo uso da janela de tempo finito e
provoca um espalhamento aparente de energia da componente fundamental sobre as
demais frequências adjacentes. Uma vez que na condição de baixo escorregamento as
componentes de frequência adjacentes tornam-se bastante próximas da fundamental, o
vazamento espectral pode provocar a não visualização correta da falha, podendo levar ao
diagnóstico incorreto;
ii. o vazamento espectral também compromete a resolução em frequência, o que dificulta a
identificação da falha. Para tornar a componente de falha mais visível no espectro, torna-
se necessário promover uma melhoria na resolução em frequência. Esse fato implica na
14
geração de uma maior quantidade de amostras provenientes de um maior tempo de
aquisição e, consequentemente, a exigência de um maior espaço de memória disponível.
(a)
(b)
Figura 3.1. Representação do espectro de Fourier para a técnica MCSA: (a) condição sem
defeito e (b) com duas barras quebradas.
Em Puche-Panadero et al. (2009) é relatada a necessidade de um tempo mínimo de 100
segundos de aquisição para se ter uma resolução de frequência de 0,01 Hz, que irá promover
uma melhora na visualização do espectro quando o sistema opera sob a condição de baixo
escorregamento.
40 45 50 55 60 65 70 75 80
-50
-40
-30
-20
-10
0
10
20M
agni
tude
da
Cor
rent
e (d
b)
Frequência (Hz)
(1 + 2s)f
(1 - 2s)f
f
40 45 50 55 60 65 70 75 80
-50
-40
-30
-20
-10
0
10
20
30
Mag
nitu
de d
a C
orre
nte
(db)
Frequência (Hz)
FALHA POR BARRA QUEBRADA
f
(1 - 2s)f
(1 + 2s)f

15
Um dos grandes desafios apresentados pela técnica clássica MCSA e demais que fazem
uso da análise de Fourier trata-se da questão conflitante, existente entre a resolução em
frequência e o tempo de amostragem. A Eq. (3.2) mostra a relação inversa entre essas duas
variáveis, em que ∆𝑓 representa a resolução em frequência e 𝑁 e 𝑇𝑚 referem-se,
respectivamente, ao número de amostras e tempo de amostragem (Puche-Panadero et al., 2009).
∆𝑓 = 𝑓𝑠𝑁
=1
𝑇𝑚
(3.2)
Diversas técnicas têm sido desenvolvidas com o objetivo de promover a redução do
tempo de aquisição sem que haja o comprometimento da resolução em frequência, tal como é
apresentado em Capolino et al. (2007) e Xu et al. (2013). Porém, a maioria dos algoritmos
propostos possui elevado custo computacional e são de difícil implementação. Outra limitação,
amplamente discutida quanto ao uso da MCSA, trata-se da inviabilidade da aplicação da técnica
quando o motor opera com carga variável e oscilante (Puche-Panadero et al., 2009; Barendse
et al., 2006; Romero-Trancoso et al., 2014).
Com o intuito de solucionar tal dificuldade relatada foi proposto na literatura o uso da
Transformada de Fourier de Curta Duração. A STFT consiste em uma técnica baseada na
aplicação de uma janela de tempo finito para aproximar sinais variáveis e oscilantes em
estacionários e dessa maneira utilizar a Transformada de Fourier para analisar tais sinais
(Fernadez-Cavero et al., 2015). A STFT realiza a análise do domínio tempo-frequência e
depende do tamanho da janela aplicada e da escolha entre uma melhor resolução na frequência
ou no tempo para a execução de um diagnóstico correto. Ela apresenta alto custo computacional
e, devido às suas limitações, poucos trabalhos têm reportado sua aplicação de forma única.
Geralmente, seu uso está associado à combinação de demais técnicas.
3.2 Transformada de Wavelet
A Transformada de Wavelet é uma importante e clássica ferramenta de processamentos
de sinais, bastante utilizada em diversas áreas, principalmente por sua característica de localizar
informações específicas de determinado sinal (Antonino-Daviu et al., 2008). A WT surgiu de
uma generalização da STFT, pelo uso de uma janela de tamanho variável, que está localizada

16
no domínio do tempo e da frequência. Consequentemente, pode-se visualizar e analisar o sinal
em ambos os domínios.
Na análise Wavelet, o sinal é decomposto (ou segmentado) em versões escalonadas de
uma função matemática denominada “Wavelet-mãe”. Ou seja, a Transformada de Wavelet pode
ser entendida como o produto interno de um sinal e versões escalonadas e deslocadas da função
“Wavelet-mãe”.
A WT é efetuada em diversas etapas, em que janelas de dimensões variáveis deslocam-
se ao longo do sinal e, em cada posição, o espectro é determinado. Esse processo pode ser
repetido inúmeras vezes. Assim, ao final, têm-se um conjunto de espectros no tempo e
frequência, todos com diferentes resoluções (larguras ou escalas). Devido a esse recurso, a
análise da WT é denominada multi-resolução.
O procedimento de janelamento do sinal é efetuado por meio de uma função Wavelet
de largura variável no tempo e frequência, localizada em ambos domínios. Essas funções
possuem parâmetros que permitem que as mesmas possam ser contraídas, expandidas e
deslocadas no tempo. Isso possibilita que janelas com maior largura e menor altura sejam
melhor aplicadas para o diagnóstico do sinal em baixa frequência (variações lentas), e que, em
alta frequência (variações rápidas do sinal), janelas de menor largura e maior altura possam ser
utilizadas. A Figura 3.2, adaptado de Fanucchi (2014), ilustra o processo de janelamento do
sinal efetuado pela WT.
Figura 3.2. Representação tempo e frequência da WT. Fonte: adaptado de Fanucchi (2014).
Sabe-se que na análise de Fourier o sinal é decomposto em formas de ondas senoidais
de diversas frequências. De forma análoga e como já citado, a WT também efetua o processo
de decomposição do sinal. No entanto, para isso, ela utiliza um conjunto de funções-base,
Fre
qu
ênci
a
Tempo

17
denominadas funções Wavelet. Tais funções são agrupadas em famílias, com distintas
propriedades, tal como ortogonalidade, entre outras.
Dentre todos os fatos citados, existe ainda, uma grande diferença entre as análises da
Wavelet e Fourier, que consiste no fato de poder criar novas funções, caso não haja famílias de
Wavelets com a propriedade requerida (Bucher, 2001).
Uma função Wavelet-mãe consiste em uma forma de onda de duração limitada, com
valor médio nulo e diferentemente das senóides, as Wavelets são irregulares, sendo definidas
matematicamente por (Bucher, 2001):
𝜓𝑎,𝑏(𝑡) =1
√|𝑎|𝜓 [
(𝑡 − 𝑏
𝑎]
(3.3)
Em que os coeficientes 𝑎 e 𝑏 referem-se, respectivamente, ao parâmetro de escala (ou
compressão) e deslocamento (translação no tempo); e o fator 1/√𝑎 é usado para garantir a
conservação de energia.
Para que determinada função seja denominada Wavelet-mãe, deve-se satisfazer algumas
condições matemáticas, tais como (Fanucchi, 2014):
ser integrável;
apresentar nível de energia unitário:
∫ | 𝜓(𝑡)|2𝑑𝑡 = 1+∞
−∞
(3.4)
obedecer a condição de admissibilidade, conforme exibido na equação abaixo:
∫ 𝜓+∞
−∞
(𝑡)𝑑𝑡 = 0
(3.5)
não possuir frequências negativas, caso a Wavelet seja complexa.
Existem diversas famílias de Wavelets relatadas na literatura, tais como: Daubechies,
Symlet, Morlet, entre outras. A Figura 3.3 ilustra a função Wavelet do tipo Morlet, retirada da
toolbox do software Matlab®.

18
Uma vez que cada “Wavelet-mãe” possui diferentes características, deve-se atentar para
a escolha dessa função, a fim de que o processo de análise do sinal seja efetuado de maneira
eficiente. Torna-se necessário que o sinal investigado seja caracterizado de forma conveniente
pela função Wavelet-mãe determinada, de modo a evitar distorções no mesmo, garantindo
assim uma análise adequada.
Figura 3.3. Exemplo de função Wavelet da família Morlet.
A WT pode ser implementada tanto em sua forma contínua, denominada Transformada
Contínua de Wavelet (Continuos Wavelet Transform-CWT), como na sua forma discreta,
representada pela Transformada Discreta de Wavelet.
A CWT de um sinal contínuo 𝑓(𝑡) é determinada pela expressão abaixo:
𝐶𝑊𝑇(𝑎, 𝑏) = ∫ 𝑓(𝑡)𝜓𝑎,𝑏∗ (𝑡)𝑑𝑡 , 𝑎 𝑒 𝑏 ∈ 𝑍
+∞
−∞
(3.6)
Em que 𝜓𝑎,𝑏∗ representa o conjugado da função “Wavelet-mãe”, dada pela Equação
(3.3).
Por apresentar problemas intrínsecos a CWT é de difícil implementação, tornando-se
assim a DWT mais aplicável na literatura, sendo definida matematicamente de acordo com a
Equação 3.7 (Fanucchi, 2014):
𝐷𝑊𝑇(𝑎, 𝑏) =1
√𝑎0𝑚
∑ 𝑓(𝑘)𝜓(𝑘 − 𝑛𝑏0𝑎0
𝑚
𝑎0𝑚 )𝑑𝑡
∞
𝑘=−∞
(3.7)
-3 -2 -1 0 1 2 3-1
-0.5
0
0.5
1Morlet wavelet

19
A Equação (3.7) representa a aplicação da Transformada de Wavelets em sinais
discretizados. Os coeficientes 𝑎0 e 𝑏0 referem-se, respectivamente, aos passos relativos à escala
e a translação da função Wavelet-mãe. Os parâmetros 𝑚 e 𝑛 estão associados à discretização
da escala e translação da função “mãe” (Fanucchi, 2014).
Com o intuito de facilitar os cálculos computacionais, é comumente adotado, o
escalonamento binário e a translação unitária. Ou seja, atribui-se 𝑎0 = 2 e 𝑏0 = 1. Para tais
valores, a DWT torna-se:
𝐷𝑊𝑇(𝑎, 𝑏) =1
√2𝑚∑ 𝑓(𝑘)𝜓 (
𝑘 − 𝑛2𝑚
2𝑚) 𝑑𝑡
∞
𝑘=−∞
(3.8)
Assim a Equação 3.8 efetua uma amostragem diádica, sendo mais adequada para a
realização de cálculos computacionais.
A DWT pode ser compreendida como a aplicação de um banco de filtros que irá dividir
o espectro do sinal em duas partes relacionadas: componentes de baixas e altas frequências,
respectivamente denominados, coeficientes de aproximação (𝑐𝑛) e detalhe (𝑑𝑛).
Esse processo de separação é obtido pela convolução entre um sinal discretizado 𝑓[𝑛] e
um par de filtros passa-alta (𝑔[𝑛]) e passa-baixa (ℎ[𝑛]). Tais filtros estão correlacionados,
respectivamente, com as funções Wavelet-mãe (𝜓) e a escala (Φ), conforme expresso nas
Equações 3.9 e 3.10.
𝑐𝑗[𝑓(𝑛)] = 𝑓[𝑛] ∗ Φ(𝑛)
(3.9)
𝑑𝑗[𝑓(𝑛)] = 𝑓[𝑛] ∗ 𝜓(𝑛) (3.10)
Uma vez que as funções Φ e 𝜓 estão relacionadas aos pares de filtros (ℎ[𝑛] e 𝑔[𝑛]), elas
podem ser representadas pelas seguintes equações (Fanucchi, 2014):
Φ[𝑛] = ∑ℎ[𝑛]
𝑗
Φ[2𝑛 − 𝑗] (3.11)
𝜓[𝑛] = ∑𝑔[𝑛]
𝑗
Φ[2𝑛 − 𝑗] (3.12)
20
Sendo que, 𝑗 e 𝑛 referem-se, respectivamente, aos índices de somatório (depende do
comprimento do filtro) e do sinal.
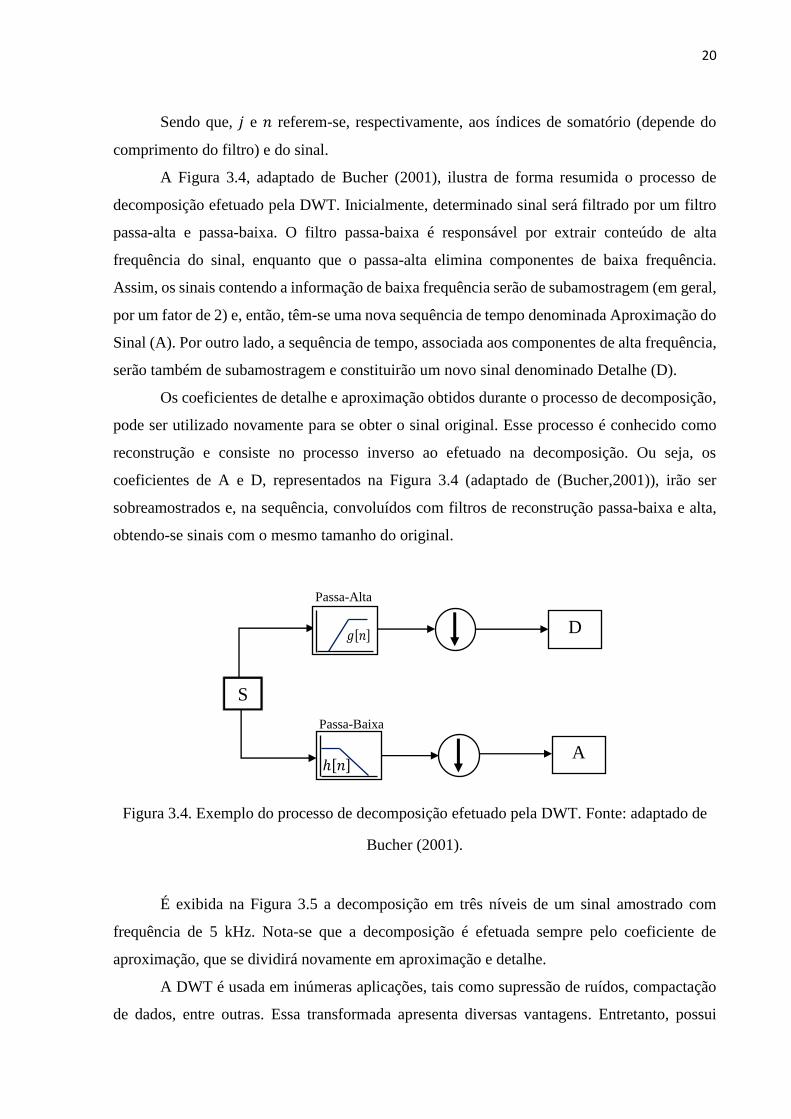
A Figura 3.4, adaptado de Bucher (2001), ilustra de forma resumida o processo de
decomposição efetuado pela DWT. Inicialmente, determinado sinal será filtrado por um filtro
passa-alta e passa-baixa. O filtro passa-baixa é responsável por extrair conteúdo de alta
frequência do sinal, enquanto que o passa-alta elimina componentes de baixa frequência.
Assim, os sinais contendo a informação de baixa frequência serão de subamostragem (em geral,
por um fator de 2) e, então, têm-se uma nova sequência de tempo denominada Aproximação do
Sinal (A). Por outro lado, a sequência de tempo, associada aos componentes de alta frequência,
serão também de subamostragem e constituirão um novo sinal denominado Detalhe (D).
Os coeficientes de detalhe e aproximação obtidos durante o processo de decomposição,
pode ser utilizado novamente para se obter o sinal original. Esse processo é conhecido como
reconstrução e consiste no processo inverso ao efetuado na decomposição. Ou seja, os
coeficientes de A e D, representados na Figura 3.4 (adaptado de (Bucher,2001)), irão ser
sobreamostrados e, na sequência, convoluídos com filtros de reconstrução passa-baixa e alta,
obtendo-se sinais com o mesmo tamanho do original.
Figura 3.4. Exemplo do processo de decomposição efetuado pela DWT. Fonte: adaptado de
Bucher (2001).
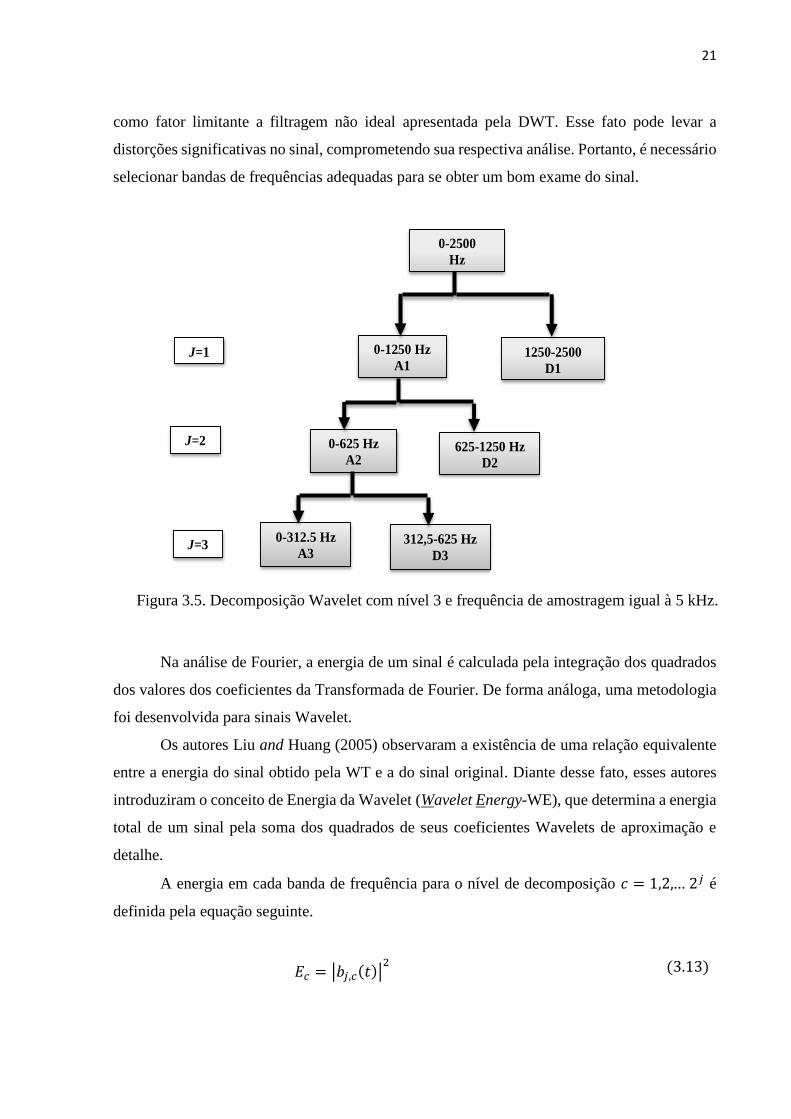
É exibida na Figura 3.5 a decomposição em três níveis de um sinal amostrado com
frequência de 5 kHz. Nota-se que a decomposição é efetuada sempre pelo coeficiente de
aproximação, que se dividirá novamente em aproximação e detalhe.
A DWT é usada em inúmeras aplicações, tais como supressão de ruídos, compactação
de dados, entre outras. Essa transformada apresenta diversas vantagens. Entretanto, possui
Passa-Baixa
Passa-Alta
S
D
A ℎ[𝑛]
𝑔[𝑛]
21
como fator limitante a filtragem não ideal apresentada pela DWT. Esse fato pode levar a
distorções significativas no sinal, comprometendo sua respectiva análise. Portanto, é necessário
selecionar bandas de frequências adequadas para se obter um bom exame do sinal.
Na análise de Fourier, a energia de um sinal é calculada pela integração dos quadrados
dos valores dos coeficientes da Transformada de Fourier. De forma análoga, uma metodologia
foi desenvolvida para sinais Wavelet.
Os autores Liu and Huang (2005) observaram a existência de uma relação equivalente
entre a energia do sinal obtido pela WT e a do sinal original. Diante desse fato, esses autores
introduziram o conceito de Energia da Wavelet (Wavelet Energy-WE), que determina a energia
total de um sinal pela soma dos quadrados de seus coeficientes Wavelets de aproximação e
detalhe.
A energia em cada banda de frequência para o nível de decomposição 𝑐 = 1,2,... 2𝑗 é
definida pela equação seguinte.
𝐸𝑐 = |𝑏𝑗,𝑐(𝑡)|2 (3.13)
0-2500
Hz
(A0)
0-1250 Hz
A1
1250-2500
D1
0-625 Hz
A2
J=1
625-1250 Hz
D2
312,5-625 Hz
D3
0-312.5 Hz
A3
J=2
J=3
Figura 3.5. Decomposição Wavelet com nível 3 e frequência de amostragem igual à 5 kHz.
22
Sendo que 𝑏j,𝑐(𝑡) consiste na amplitude do coeficiente da DWT para cada ponto
discreto em sua respectiva banda de frequência.
A energia total do sinal é dada por:
𝐸 = ( ∑𝐸𝑐
2𝑗
𝑐=1
)
(3.14)
Pela normalização dos valores de energia, obtém-se a WE, que corresponde ao nível de
energia em cada pacote Wavelet, definida por (Liu and Huang, 2005):
𝐻 = [𝐸1
𝐸,𝐸2
𝐸,… . .
𝐸2𝑗
𝐸]
(3.15)
Dessa forma, por meio do cálculo da Equação 3.15, obtém-se a energia normalizada em
cada banda de frequência.
Diante da ocorrência de assimetrias no rotor de uma máquina de indução, a assinatura
da falha está contida em determinada banda de frequência. Nesse caso, de acordo com o
conceito da WE, pode-se calcular o nível de energia em cada banda e, conforme sua variação,
pode-se detectar a presença da falha. Isso torna a WE em um excelente parâmetro quantitativo
para identificar e caracterizar fenômenos de interesse, tal como a detecção de defeitos na
máquina.
3.3 Técnicas de Demodulação de Sinais
A demodulação é uma operação de processamentos de sinais que proporciona a
separação entre o sinal portador (forma de onda que transmite as informações relacionados à
frequência de alimentação) e o sinal modulador (forma de onda que transporta características
referentes à frequência de modulação), sendo bastante aplicada em sistema de comunicação e
na área de detecção e diagnóstico de falha.
O processo de demodulação suprime a frequência portadora, extraindo do sinal uma
nova sequência de tempo modulada denominada sinal modulador ou envelope. O envelope irá
conter componentes característicos relacionado à falha. Uma vez, que a influência do sinal
portador foi eliminada, as frequências de falhas tornam-se mais visíveis, ficando mais fácil a
identificação do componente de falha (Mohanty et al., 2006).
23
Existem inúmeras técnicas de processamentos de sinais empregadas para demodular
sinais, entre estas: a clássica Transformada de Hilbert (Sapena-Banõ et al., 2015; Oumaamar et
al., 2007); sua derivada denominada Transformada de Hilbert-Huang (Hilbert-Huan Transform
- HHT), abordada em (Hamdad et al., 2015); e o método empírico EMD (Empirical Mode
Decomposition-EMD), apresentado por (Morales-Corporal et al., 2014; Valles-Novo et al.,
2015), e ainda a técnica de demodulação denominada Demodulação Empírica (Empirical
Demodulation-ED), recentemente proposta por (Batista et al., 2016), entre outras.
3.3.1 Transformada de Hilbert
A Transformada de Hilbert trata-se de uma clássica técnica, amplamente aplicada na
identificação de falhas em motores de indução. Seu uso está associado ao processo de
demodulação e a detecção de envelopes.
Seja um sinal modulado qualquer, representado por 𝑥(𝑡), a Transformada de Hilbert de
tal sinal pode ser definida pelas Eqs. 3.16 e 3.17 (Konar et al., 2013).
𝐻[𝑥(𝑡)] = 𝑦(𝑡) =1
𝜋𝑃 ∫
𝑥(𝜏)
𝑡 − 𝜏
+∞
−∞
𝑑𝜏 (3.16)
Normalmente, não é possível determinar a HT por meio de sua integral imprópria,
devido à existência do polo em 𝜏 = 𝑡. Entretanto, a variável 𝑃, definida como principal valor
de Cauchy, expande a classe na qual a integral é calculada, de modo que a expressão dada pela
Equação 3.16 pode ser somente determinada para valores nos quais a integral exista (Marques,
2013).
A HT também pode ser representada como uma operação de convolução, entre a função
(1
𝜋𝑡) e o sinal original 𝑥(𝑡), conforme a Equação 3.17 (Ahamed et al., 2014).
𝐻[𝑥(𝑡)] =1
𝜋𝑡⨂𝑥(𝑡)
(3.17)
Teoricamente, qualquer sinal analítico definido por 𝑧(𝑡) pode ser representado pela
soma de sua parte real 𝑟(𝑡) e imaginária 𝑦(𝑡). Pode-se obter 𝑦(𝑡), por meio da aplicação da
HT, como representado na Equação 3.18.
24
𝑦(𝑡) = 𝐻[𝑥(𝑡)] (3.18)
Assim, 𝑧(𝑡) é definido por (Yan and Gao, 2006):
𝑧(𝑡) = 𝑟(𝑡) + 𝑗𝑦(𝑡)
(3.19)
Pode-se reescrever a Equação 3.19, em sua polar, como representado pela expressão
seguinte:
𝑧(𝑡) = 𝐴(𝑡)𝑒𝑗𝜃(𝑡) (3.20)
Sendo que 𝐴(𝑡) e 𝜃(𝑡) representam, respectivamente, a amplitude e a fase instantânea
do sinal analítico.
O envelope ou sequência de tempo moduladora de 𝑧(𝑡) é definido como o módulo do
sinal analítico, representado pela Equação 3.21.
𝐴(𝑡) = √𝑥(𝑡)2 + 𝑦(𝑡)2
(3.21)
𝜃(𝑡) = 𝑡𝑎𝑛−1 (𝑦(𝑡)
𝑥(𝑡))
(3.22)
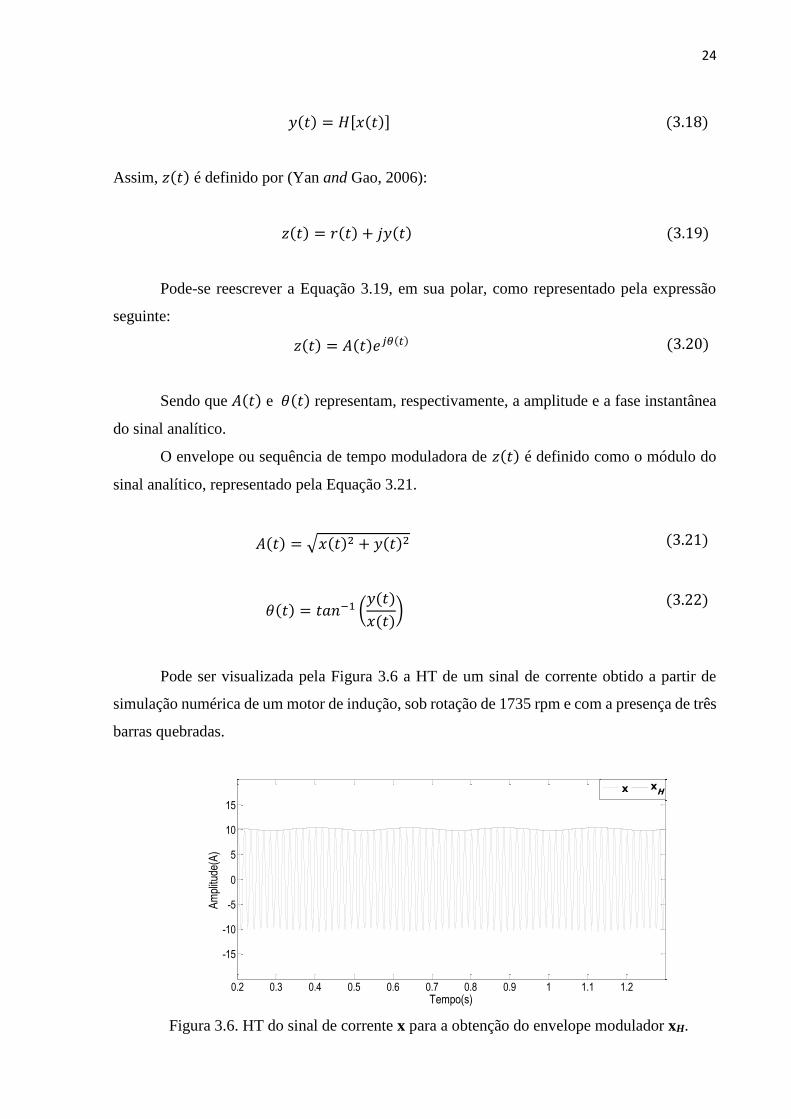
Pode ser visualizada pela Figura 3.6 a HT de um sinal de corrente obtido a partir de
simulação numérica de um motor de indução, sob rotação de 1735 rpm e com a presença de três
barras quebradas.
Figura 3.6. HT do sinal de corrente x para a obtenção do envelope modulador xH.
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2
-15
-10
-5
0
5
10
15
Am
plitu
de(A
)
Tempo(s)
x xH

25
O sinal x é denominado portador e refere-se à forma de onda da corrente que contém as
características associadas à frequência de alimentação, enquanto que o sinal xH transmite as
informações referentes ao componente de falha, sendo denominado como sinal modulador ou
envelope.
3.3.2 Transformada de Hilbert-Huang
A Transformada de Hilbert-Huang é empregada na análise de sinais não-estacionários e
não-lineares, baseada na clássica Transformada de Hilbert e na EMD. A EMD é responsável
pela decomposição dos sinais em formas de ondas, denominadas monocomponentes ou funções
intrínsecas (Capolino et al., 2011). O algoritmo de implementação da HHT é bastante simples,
sendo detalhado pelas etapas a seguir (Hamdad et al., 2015).
1) Inicialmente, a EMD extrai do sinal original as formas de ondas monocomponentes por meio
da busca por pontos locais (máximos e mínimos). Em seguida, pela aplicação da interpolação
cúbica, envelopes superiores e inferiores são determinados.
2) Posteriormente, o valor médio de tais envelopes é calculado. A diferença existente entre o
sinal original e o envelope médio consiste na parte monocomponente do sinal. Dessa forma,
as etapas 1 e 2 são executadas, até que todas as partes monocomponentes do sinal original
sejam determinadas.
3) Em seguida, a HT é aplicada a fim de se estimar a frequência instantânea, referente a cada
parte monocomponente.
3.3.3 Demodulação Empírica
Os sinais de corrente usado no diagnóstico de barras quebradas contêm inúmeros
componentes de frequência de diversas origens, relacionados com ruídos ou até mesmo
associados a outros defeitos. Portanto, esses sinais transportam informações que não são úteis
na respectiva análise da falha e, além disso, podem comprometer a visualização do conteúdo de
frequência da falha.
Desta maneira, o processo de demodulação de sinais consiste em uma importante
operação, uma vez que permite eliminar componentes de frequências indesejáveis no sinal de
falha. E assim, após a operação de demodulação, o envelope construído conterá todas as
características da falha, que serão predominantes e de fácil identificação.

26
O processo de demodulação dos sinais pode ser realizado por meio da aplicação de
várias ferramentas de processamento de sinal. No presente estudo, a demodulação é realizada
por meio da implementação de uma técnica denominada Demodulação Empírica, inicialmente
apresentada por Batista et al., (2016). A ED baseia-se na obtenção do envelope por meio da
interpolação de pontos extremos locais (mínimos e máximos locais), sendo que o envelope
construído representará a sequência de tempo desejada que irá transmitir as características de
falha necessárias para a realização do diagnóstico. Além disso, a ED consiste em uma
ferramenta bastante atraente para o propósito desta pesquisa, devido à sua simplicidade e
facilidade de implementação computacional. As etapas para a formulação da ED são descritas
a seguir.
Algoritmo-Demodulação Empírica (ED)
Passo 1: extrair o nível DC do sinal x.
Passo 2: atribuir as sequências incompletas ˆEDx e EDt :
ˆ and ED ED x t
PARA 𝑛 = 1,2, … . , 𝑁 − 2
SE 𝑥[𝑛 + 1] ≥ 𝑥[𝑛] E 𝑥[𝑛 + 1] ≥ 𝑥[𝑛 + 2] E 𝑥[𝑛 + 1] ≥ 0
ENTÃO 𝑥[𝑛 + 1] é um máximo local, ˆEDx = ˆ
EDx 𝑥[𝑛 + 1], e EDt = EDt 𝑡[𝑛 + 1]
SE 𝑥[𝑛 + 1] ≤ 𝑥[𝑛] E 𝑥[𝑛 + 1] ≤ 𝑥[𝑛 + 2] E 𝑥[𝑛 + 1] ≤ 0
ENTÃO 𝑥[𝑛 + 1] é um mínimo local, ˆEDx = ˆ
EDx 𝑥[𝑛 + 1],e EDt = EDt 𝑡[𝑛 + 1]
Atualizar as sequências ˆEDx e EDt :
ˆ ˆ ˆ ˆ ˆ ˆ1 2 1 ED ED ED ED ED EDx x x end x end x x
1 2 1 1 1 1
1
ED ED ED ED
ED ED
t t t t t t
t end t end t end t end t end t end
t t
Passo 3: interpolar as amplitudes ˆEDx i posicionadas em suas respectivas posições em (i =
1,2,…,length ( ˆEDx ) e obter a sequência com cada amplitude EDx j em sua posição
correspondente t j (j = 1,2,…, N).
Passo 4: determinar o envelope modulador:
ED EDx x

27
A Figura 3.7 ilustra uma aplicação da técnica ED em um sinal de corrente x, que foi
determinado pela simulação numérica do modelo dinâmico assimétrico por barras quebradas,
descrito no Capítulo 4, assumindo rotação de 1735 rpm e a presença de três barras quebradas.
Figura 3.7. Exemplo de aplicação da técnica ED ao sinal de corrente x para a obtenção do
envelope modulador xED.
3.4 Conclusão
Este capítulo teve como objetivo apresentar os tradicionais métodos de detecção e
diagnóstico de falhas exibidos na literatura. Foram descritas também as principais ferramentas
de processamentos de sinais empregadas para a demodulação e decomposição dos sinais.
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
-15
-10
-5
0
5
10
15
Am
plitu
de(A
)
Tempo(s)
x xED

CAPÍTULO 4
Modelo Matemático do Motor de Indução
O modelo dinâmico do motor de indução é bastante conhecido na literatura e permite
simular computacionalmente o comportamento da máquina, sob diferentes condições de
operação e diante da ausência de falhas. Nesse contexto, torna-se possível analisar grandezas
internas relacionadas com a máquina de indução, tais como: tensão e corrente; fluxo
concatenado; torque eletromagnético; entre outras (Baccarini, 2005).
O modelo matemático clássico do MIT baseia-se em uma máquina de indução com rotor
bobinado, simétrica, com 2 polos lisos e alimentação trifásica e equilibrada. Com o intuito de
reduzir a complexidade desse modelo, aplica-se a Transformada de Park e obtém-se o modelo
convencional dq0. A Transformada de Park proporciona a diminuição do número de variáveis,
por meio da conversão do sistema trifásico em um modelo equivalente, representado por um
sistema de eixos ortogonais, arbitrários e girantes, denominados eixos dq0. Ou seja, as
componentes abc, referentes ao rotor e estator da máquina, podem ser convertidas em variáveis
equivalentes de eixo dq0, por meio da aplicação da Transformada de Park, conforme exibido
na Equação 4.1.
[
𝑥𝑞
𝑥𝑑
𝑥0
] =2
3
[ 𝑐𝑜𝑠𝜃 𝑐𝑜𝑠 (𝜃 −
2𝜋
3) 𝑐𝑜𝑠 (𝜃 +
2𝜋
3)
𝑠𝑒𝑛𝜃 𝑠𝑒𝑛 (𝜃 −2𝜋
3) 𝑠𝑒𝑛 (𝜃 +
2𝜋
3)
1
2
1
2
1
2 ]
[
𝑥𝑎
𝑥𝑏
𝑥𝑐
]
(4.1)
Uma vez que a maioria das conexões de motores de indução trifásicos, em aplicações
práticas, é constituída por um sistema, a três fios, pode-se então negligenciar a componente de
sequência zero (representada pelo índice 0). Portanto, o novo sistema de coordenadas pode ser
resumido de acordo com a Equação 4.2, conforme apresentado na Figura 4.1.
[𝑥𝑞
𝑥𝑑] =
2
3[𝑐𝑜𝑠𝜃 𝑐𝑜𝑠 (𝜃 −
2𝜋
3) 𝑐𝑜𝑠 (𝜃 +
2𝜋
3)
𝑠𝑒𝑛𝜃 𝑠𝑒𝑛 (𝜃 −2𝜋
3) 𝑠𝑒𝑛 (𝜃 +
2𝜋
3)
] [
𝑥𝑎
𝑥𝑏
𝑥𝑐
]
(4.2)

29
Em que (𝑥𝑞 e 𝑥𝑑) correspondem, respectivamente, à componente de eixo direto e
quadratura. As componentes (𝑥𝑎, 𝑥𝑏 , 𝑥𝑐) referem-se às variáveis do sistema trifásico abc.
O ângulo 𝜃 refere-se ao ângulo de defasamento entre os eixos abc e dq, e a constante 𝜔
consiste na velocidade angular de referência.
Pode-se variar a posição do eixo arbitrário em relação ao dq, considerando as seguintes
posições:
eixo de referência fixo no estator: variáveis do circuito são referidas para o eixo estacionário,
em que a velocidade do sistema de referência dq assume valor nulo (𝜔 = 0);
eixo de referência fixo no campo girante: variáveis do circuito são referidas para eixo
rotacional síncrono, em que a velocidade do sistema de referência dq é igual à rede de
alimentação (𝜔 = 𝜔𝑒);
eixo de referência fixo no rotor: variáveis do circuito são referidas para o eixo fixo no rotor,
em que a velocidade do sistema de referência dq é igual a velocidade rotórica (𝜔 = 𝜔𝑟).
O modelo dinâmico dq0 do motor de indução pode ser descrito pelas seguintes
equações:
𝑣𝑑𝑠 = 𝑟𝑠𝑖𝑑𝑠 − 𝜔𝜆𝑞𝑠 + 𝑝𝜆𝑑𝑠 (4.3)
𝑣𝑞𝑠 = 𝑟𝑠𝑖𝑞𝑠 + 𝜔𝜆𝑑𝑠 + 𝑝𝜆𝑞𝑠 (4.4)
ω
𝜃
d
b
c q
a
Figura 4.1. Transformação do eixo abc para o eixo dq.

30
𝑣𝑞𝑟′ = 𝑟𝑟
′𝑖𝑞𝑟′ + (𝜔 − 𝜔𝑟)𝜆𝑑𝑟
′ + 𝑝𝜆𝑞𝑟′ (4.5)
𝑣𝑑𝑟′ = 𝑟𝑟
′𝑖𝑑𝑟′ − (𝜔 − 𝜔𝑟)𝜆𝑞𝑟
′ + 𝑝𝜆𝑑𝑟′ (4.6)
Em que :
as variáveis (𝑣𝑑𝑠, 𝑣𝑞𝑠, 𝑣𝑑𝑟′ , 𝑣𝑞𝑟
′ ) e (𝑖𝑑𝑠, 𝑖𝑞𝑠, 𝑖𝑑𝑟′ , 𝑖𝑞𝑟
′ ) correspondem, respectivamente, as
tensões e correntes de eixo direto e em quadratura;
as componentes (𝜆𝑑𝑠,𝜆𝑞𝑠, 𝜆𝑑𝑟′ e 𝜆𝑞𝑟
′ ) referem-se aos fluxos concatenados de eixo direto e em
quadratura;
os parâmetros (𝐿𝑙𝑠 e 𝐿𝑙𝑟′ ) e (𝑟𝑟
′ e 𝑟𝑠) consistem nas indutâncias de dispersão e nas resistências
do estator e rotor;
𝐿𝑀 é a indutância de magnetização e 𝑝 é o par de polos da máquina;
o apóstrofo (′) indica que tal variável está referida ao estator.
Efetuando a manipulação matemáticas das equações acima, obtem-se a relação dos
fluxos concatenados e do torque eletromagnético, representado pelas Equações 4.7 a 4.11.
𝜆𝑑𝑠 = 𝐿𝑙𝑠𝑖𝑑𝑠 + 𝐿𝑀(𝑖𝑑𝑠 + 𝑖𝑑𝑟′ ) (4.7)
𝜆𝑞𝑠 = 𝐿𝑙𝑠𝑖𝑞𝑠 + 𝐿𝑀(𝑖𝑞𝑠 + 𝑖𝑞𝑟′ ) (4.8)
𝜆𝑑𝑟′ = 𝐿𝑙𝑟
′ 𝑖𝑑𝑟′ + 𝐿𝑀(𝑖𝑑𝑠 + 𝑖𝑑𝑟
′ ) (4.9)
𝜆𝑞𝑟′ = 𝐿𝑙𝑟
′ 𝑖𝑞𝑟′ + 𝐿𝑀(𝑖𝑞𝑠 + 𝑖𝑞𝑟
′ ) (4.10)
𝑇𝑒 = (3
2) (
𝑝
2) (𝜆𝑑𝑠𝑖𝑞𝑠 − 𝜆𝑞𝑠𝑖𝑑𝑠) (4.11)
Uma abordagem mais completa, referente ao modelo dinâmico do motor de indução,
pode ser vista em Krause (2002).
4.1 Modelo Assimétrico de Barras do Rotor
Embora o modelo clássico dq0 seja adequado para a aplicação em diversas situações, o
mesmo não representa de forma satisfatória assimetrias na gaiola do rotor de uma máquina de

31
indução. Devido a isso, inúmeros modelos matemáticos foram desenvolvidos na literatura com
o intuito de reproduzir condições defeituosas nas barras rotóricas. Entretanto, a maioria
apresenta uma modelagem complexa e um elevado custo computacional em sua
implementação.
Diante desse contexto, foi utilizado na realização dos ensaios numéricos do presente
trabalho o modelo dinâmico de máquinas de indução com assimetrias nas barras do rotor
proposto por Cunha (2006). Esse modelo é baseado na teoria de circuitos elétricos
magneticamente acoplados, de forma que a corrente em barra pode ser tratada como variável
independente. Além disso, conceitos acerca da notação de vetores espaciais e componentes
simétricas foram fortemente utilizados para a construção da modelagem da gaiola do rotor.
Assim, a gaiola do rotor pode ser representada por um conjunto de (n+1) malhas
independentes e mutuamente acopladas, conforme detalhado na Figura 4.2, adaptado de Cunha
(2006). Dessa forma, n malhas referem-se às correntes rotóricas, entre as barras dadas por
(𝑖𝑟1, 𝑖𝑟2, … . . 𝑖𝑟𝑛), enquanto que a outra malha está associada à corrente de anel de curto-circuito.
Figura 4.2. Rotor gaiola com suas respectivas malhas. Fonte: adaptado de Cunha (2006).
Uma vez que as correntes entre as barras do rotor estão acopladas entre si e aos
enrolamentos do estator, por meio da indutância mútua, pode-se representar as barras do rotor
e os anéis de terminações em um circuito equivalente R-L série, de acordo com a Figura 4.3
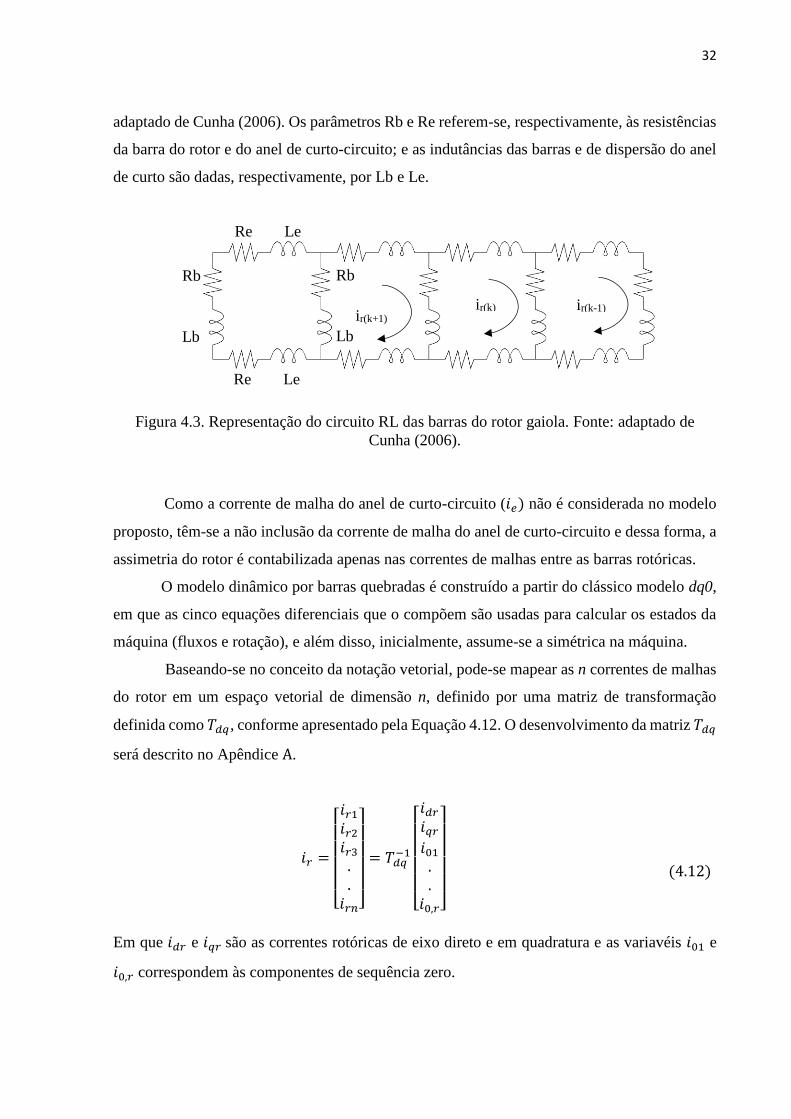
32
Rb
Lb
Rb
Lb
Re Le
Re Le
adaptado de Cunha (2006). Os parâmetros Rb e Re referem-se, respectivamente, às resistências
da barra do rotor e do anel de curto-circuito; e as indutâncias das barras e de dispersão do anel
de curto são dadas, respectivamente, por Lb e Le.
Figura 4.3. Representação do circuito RL das barras do rotor gaiola. Fonte: adaptado de
Cunha (2006).
Como a corrente de malha do anel de curto-circuito (𝑖𝑒) não é considerada no modelo
proposto, têm-se a não inclusão da corrente de malha do anel de curto-circuito e dessa forma, a
assimetria do rotor é contabilizada apenas nas correntes de malhas entre as barras rotóricas.
O modelo dinâmico por barras quebradas é construído a partir do clássico modelo dq0,
em que as cinco equações diferenciais que o compõem são usadas para calcular os estados da
máquina (fluxos e rotação), e além disso, inicialmente, assume-se a simétrica na máquina.
Baseando-se no conceito da notação vetorial, pode-se mapear as n correntes de malhas
do rotor em um espaço vetorial de dimensão n, definido por uma matriz de transformação
definida como 𝑇𝑑𝑞, conforme apresentado pela Equação 4.12. O desenvolvimento da matriz 𝑇𝑑𝑞
será descrito no Apêndice A.
𝑖𝑟 =
[ 𝑖𝑟1
𝑖𝑟2
𝑖𝑟3
.
.𝑖𝑟𝑛]
= 𝑇𝑑𝑞−1
[ 𝑖𝑑𝑟
𝑖𝑞𝑟
𝑖01
.
.𝑖0,𝑟]
(4.12)
Em que 𝑖𝑑𝑟 e 𝑖𝑞𝑟 são as correntes rotóricas de eixo direto e em quadratura e as variavéis 𝑖01 e
𝑖0,𝑟 correspondem às componentes de sequência zero.
ir(k+1) ir(k) ir(k-1)
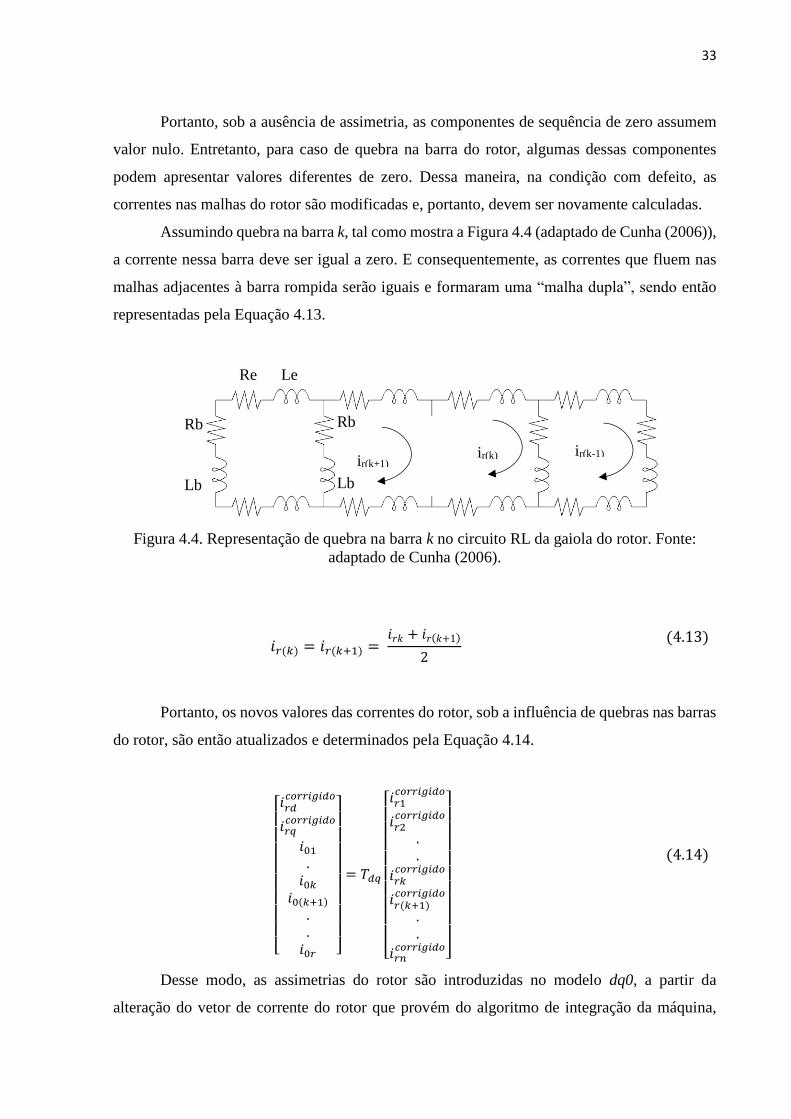
33
Portanto, sob a ausência de assimetria, as componentes de sequência de zero assumem
valor nulo. Entretanto, para caso de quebra na barra do rotor, algumas dessas componentes
podem apresentar valores diferentes de zero. Dessa maneira, na condição com defeito, as
correntes nas malhas do rotor são modificadas e, portanto, devem ser novamente calculadas.
Assumindo quebra na barra k, tal como mostra a Figura 4.4 (adaptado de Cunha (2006)),
a corrente nessa barra deve ser igual a zero. E consequentemente, as correntes que fluem nas
malhas adjacentes à barra rompida serão iguais e formaram uma “malha dupla”, sendo então
representadas pela Equação 4.13.
Figura 4.4. Representação de quebra na barra k no circuito RL da gaiola do rotor. Fonte:
adaptado de Cunha (2006).
𝑖𝑟(𝑘) = 𝑖𝑟(𝑘+1) = 𝑖𝑟𝑘 + 𝑖𝑟(𝑘+1)
2
(4.13)
Portanto, os novos valores das correntes do rotor, sob a influência de quebras nas barras
do rotor, são então atualizados e determinados pela Equação 4.14.
[ 𝑖𝑟𝑑
𝑐𝑜𝑟𝑟𝑖𝑔𝑖𝑑𝑜
𝑖𝑟𝑞𝑐𝑜𝑟𝑟𝑖𝑔𝑖𝑑𝑜
𝑖01
.𝑖0𝑘
𝑖0(𝑘+1)
.
.𝑖0𝑟 ]
= 𝑇𝑑𝑞
[ 𝑖𝑟1
𝑐𝑜𝑟𝑟𝑖𝑔𝑖𝑑𝑜
𝑖𝑟2𝑐𝑜𝑟𝑟𝑖𝑔𝑖𝑑𝑜
.
.
𝑖𝑟𝑘𝑐𝑜𝑟𝑟𝑖𝑔𝑖𝑑𝑜
𝑖𝑟(𝑘+1)𝑐𝑜𝑟𝑟𝑖𝑔𝑖𝑑𝑜
.
.
𝑖𝑟𝑛𝑐𝑜𝑟𝑟𝑖𝑔𝑖𝑑𝑜
]
(4.14)
Desse modo, as assimetrias do rotor são introduzidas no modelo dq0, a partir da
alteração do vetor de corrente do rotor que provém do algoritmo de integração da máquina,
Rb
Lb
Re Le
Rb
Lb
ir(k+1) ir(k) ir(k-1)

34
conforme ilustrado na Figura 4.5 (retirada de Baccarini, 2005). Sendo que os parâmetros t e h
referem-se, respectivamente, ao tempo total e ao passo de integração.
O modelo assimétrico por barras quebradas proposto por Cunha (2006) apresentado
nesta seção é aplicado para simulações numéricos de regime transiente e permanente, e além
disso, os parâmetros requeridos para sua implementação são de fácil obtenção.
NÃO
SIM
NÃO
Início
Leitura dos parâmetros
do motor
t=t+h
Geração das tensões de
alimentação do motor
Cálculo dos estados do
motor: fluxo e rotação
Cálculo das correntes
Cálculo do Conjugado
Existem
barras
quebradas?
??
t>t_sim
??
FIM
Atualiza os
estados
Transformação das
correntes 𝐼𝑑𝑟 e 𝐼𝑞𝑟 para o
eixo dq fixos no rotor
Correntes nas barras
quebradas=0
Cálculo das correntes
em cada malha
Transformação das
correntes 𝐼𝑑𝑟 e 𝐼𝑞𝑟 para o
eixo dq estacionário
SIM
Correntes das
correntes 𝐼𝑑𝑟 e 𝐼𝑞𝑟
Figura 4.5. Algoritmo de Integração do Modelo Assimétrico por Barras Quebradas.
Fonte: retirada de Baccarini (2005).
35
4.2 Conclusão
No presente capítulo foi apresentado o modelo dinâmico assimétrico do motor de
indução, proposto por Cunha (2006). Tal modelo possibilitou analisar o comportamento da
máquina em regime permanente e foi usado na realização dos ensaios numéricos com o intuito
de analisar os métodos propostos de detecção.
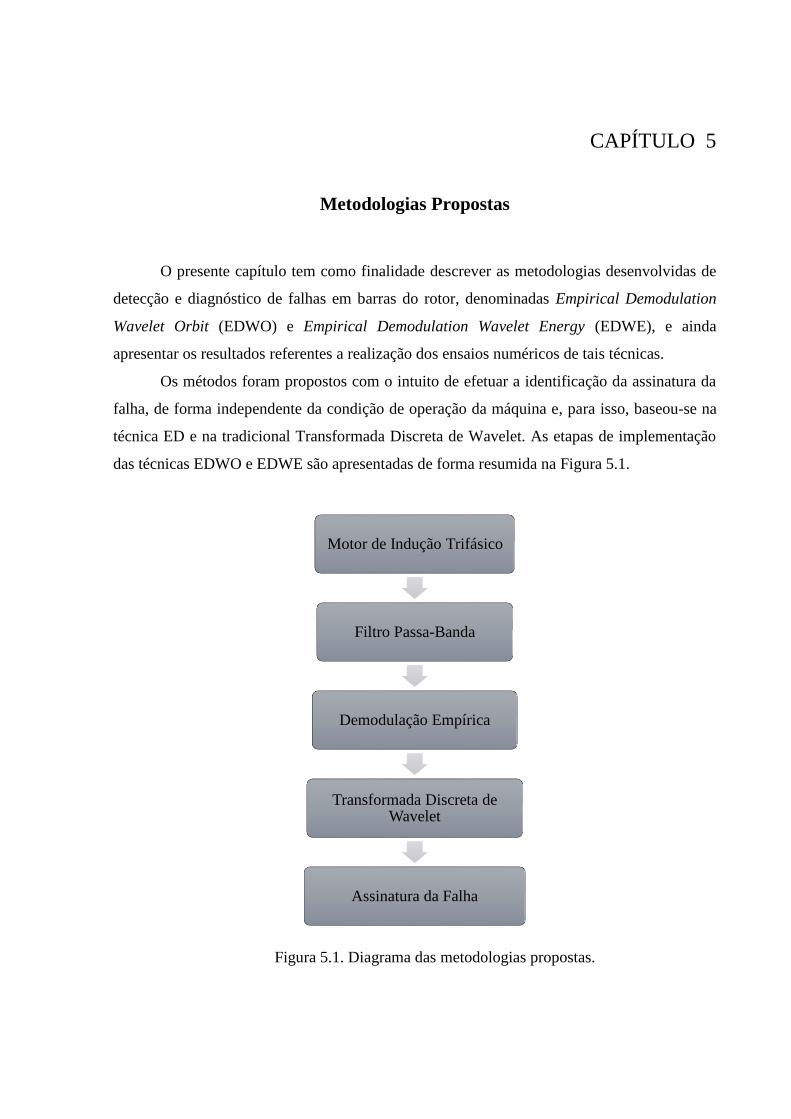
Motor de Indução Trifásico
Filtro Passa-Banda
Demodulação Empírica
Transformada Discreta de Wavelet
Assinatura da Falha
CAPÍTULO 5
Metodologias Propostas
O presente capítulo tem como finalidade descrever as metodologias desenvolvidas de
detecção e diagnóstico de falhas em barras do rotor, denominadas Empirical Demodulation
Wavelet Orbit (EDWO) e Empirical Demodulation Wavelet Energy (EDWE), e ainda
apresentar os resultados referentes a realização dos ensaios numéricos de tais técnicas.
Os métodos foram propostos com o intuito de efetuar a identificação da assinatura da
falha, de forma independente da condição de operação da máquina e, para isso, baseou-se na
técnica ED e na tradicional Transformada Discreta de Wavelet. As etapas de implementação
das técnicas EDWO e EDWE são apresentadas de forma resumida na Figura 5.1.
Figura 5.1. Diagrama das metodologias propostas.
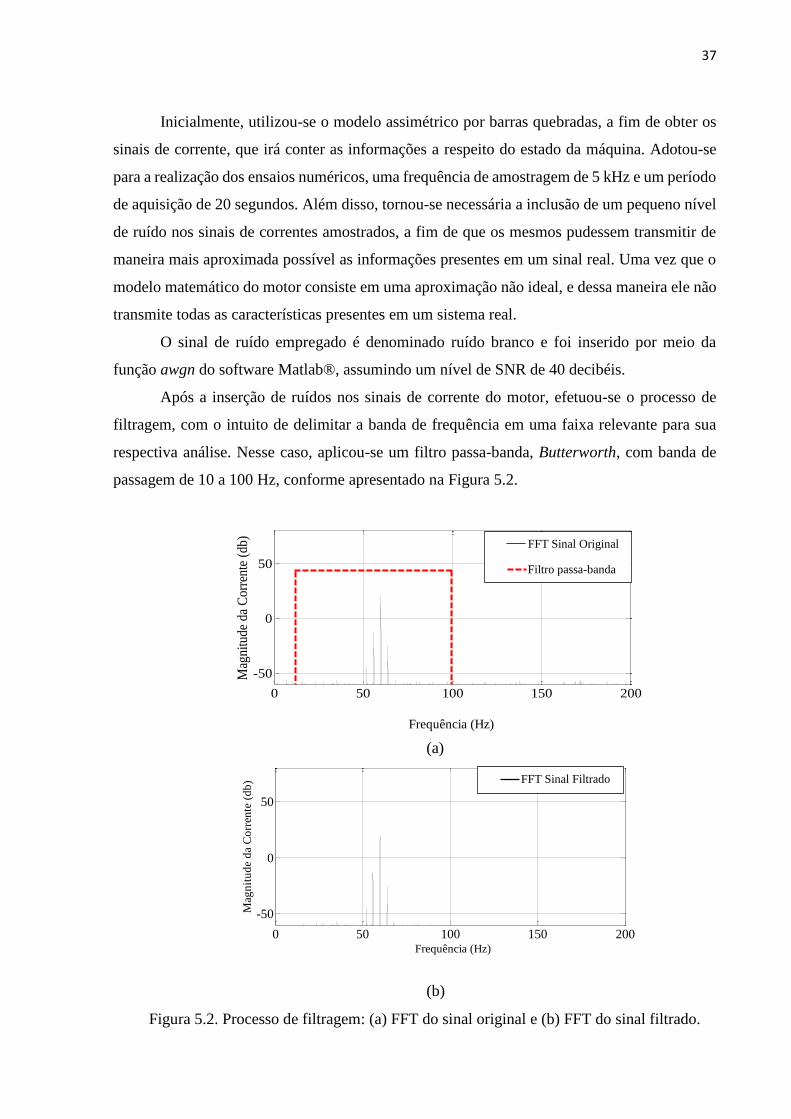
37
Inicialmente, utilizou-se o modelo assimétrico por barras quebradas, a fim de obter os
sinais de corrente, que irá conter as informações a respeito do estado da máquina. Adotou-se
para a realização dos ensaios numéricos, uma frequência de amostragem de 5 kHz e um período
de aquisição de 20 segundos. Além disso, tornou-se necessária a inclusão de um pequeno nível
de ruído nos sinais de correntes amostrados, a fim de que os mesmos pudessem transmitir de
maneira mais aproximada possível as informações presentes em um sinal real. Uma vez que o
modelo matemático do motor consiste em uma aproximação não ideal, e dessa maneira ele não
transmite todas as características presentes em um sistema real.
O sinal de ruído empregado é denominado ruído branco e foi inserido por meio da
função awgn do software Matlab®, assumindo um nível de SNR de 40 decibéis.
Após a inserção de ruídos nos sinais de corrente do motor, efetuou-se o processo de
filtragem, com o intuito de delimitar a banda de frequência em uma faixa relevante para sua
respectiva análise. Nesse caso, aplicou-se um filtro passa-banda, Butterworth, com banda de
passagem de 10 a 100 Hz, conforme apresentado na Figura 5.2.
(a)
(b)
Figura 5.2. Processo de filtragem: (a) FFT do sinal original e (b) FFT do sinal filtrado.
0 50 100 150 200
-50
0
50
Mag
nitu
de d
a C
orre
nte
(db)
Frequência
0 50 100 150 200
-50
0
50
Mag
nit
ud
e d
a C
orr
ente
(d
b)
Frequência (Hz)
FFT Sinal Original
Filtro passa-banda
FFT Sinal Filtrado
0 50 100 150 200
-50
0
50
Mag
nit
ud
e d
a C
orr
ente
(d
b)
Frequência (Hz)
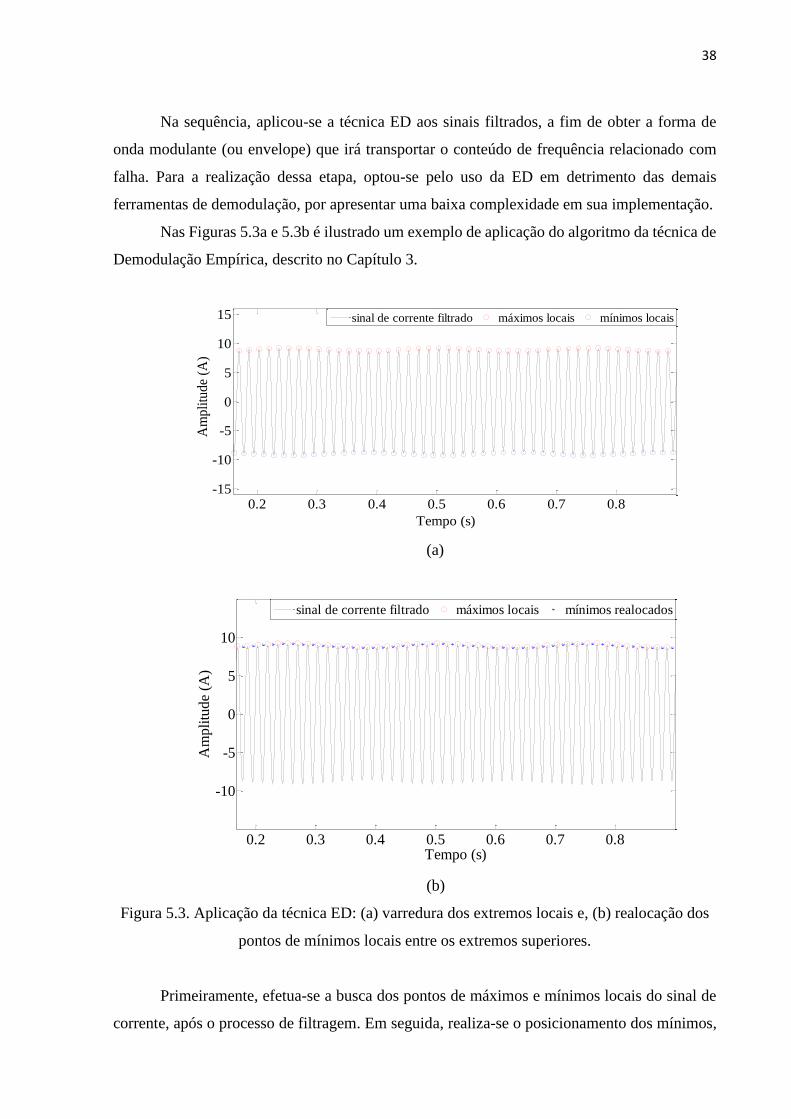
38
Na sequência, aplicou-se a técnica ED aos sinais filtrados, a fim de obter a forma de
onda modulante (ou envelope) que irá transportar o conteúdo de frequência relacionado com
falha. Para a realização dessa etapa, optou-se pelo uso da ED em detrimento das demais
ferramentas de demodulação, por apresentar uma baixa complexidade em sua implementação.
Nas Figuras 5.3a e 5.3b é ilustrado um exemplo de aplicação do algoritmo da técnica de
Demodulação Empírica, descrito no Capítulo 3.
(a)
(b)
Figura 5.3. Aplicação da técnica ED: (a) varredura dos extremos locais e, (b) realocação dos
pontos de mínimos locais entre os extremos superiores.
Primeiramente, efetua-se a busca dos pontos de máximos e mínimos locais do sinal de
corrente, após o processo de filtragem. Em seguida, realiza-se o posicionamento dos mínimos,
0.2 0.3 0.4 0.5 0.6 0.7 0.8-15
-10
-5
0
5
10
15
Tempo (s)
Am
pli
tud
e (A
)
sinal de corrente filtrado máximos locais mínimos locais
0.2 0.3 0.4 0.5 0.6 0.7 0.8
-10
-5
0
5
10
Tempo (s)
Am
pli
tude
(A)
sinal de corrente filtrado máximos locais mínimos realocados
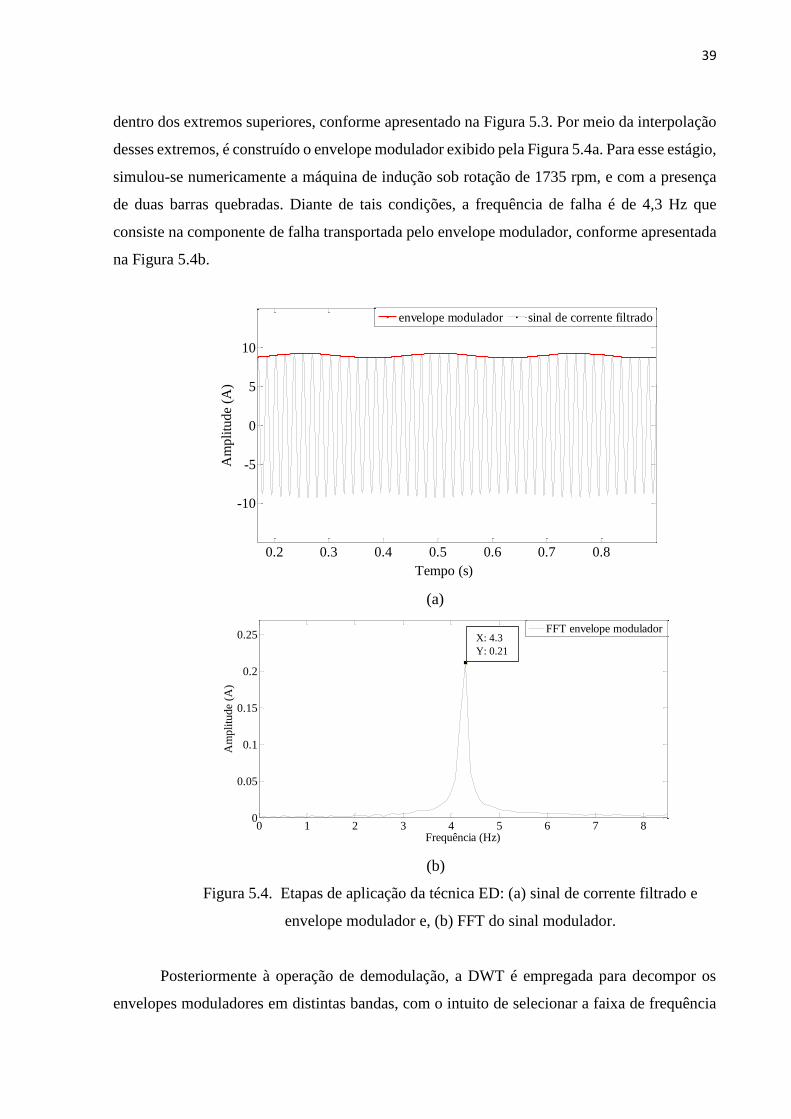
39
dentro dos extremos superiores, conforme apresentado na Figura 5.3. Por meio da interpolação
desses extremos, é construído o envelope modulador exibido pela Figura 5.4a. Para esse estágio,
simulou-se numericamente a máquina de indução sob rotação de 1735 rpm, e com a presença
de duas barras quebradas. Diante de tais condições, a frequência de falha é de 4,3 Hz que
consiste na componente de falha transportada pelo envelope modulador, conforme apresentada
na Figura 5.4b.
(a)
(b)
Figura 5.4. Etapas de aplicação da técnica ED: (a) sinal de corrente filtrado e
envelope modulador e, (b) FFT do sinal modulador.
Posteriormente à operação de demodulação, a DWT é empregada para decompor os
envelopes moduladores em distintas bandas, com o intuito de selecionar a faixa de frequência
0.2 0.3 0.4 0.5 0.6 0.7 0.8
-10
-5
0
5
10
Tempo (s)
Am
pli
tude
(A)
envelope modulador sinal de corrente filtrado
0 1 2 3 4 5 6 7 80
0.05
0.1
0.15
0.2
0.25
X: 4.3
Y: 0.2119
Frequência (Hz)
Am
pli
tude
(A)
FFT envelope modulador X: 4.3
Y: 0.21
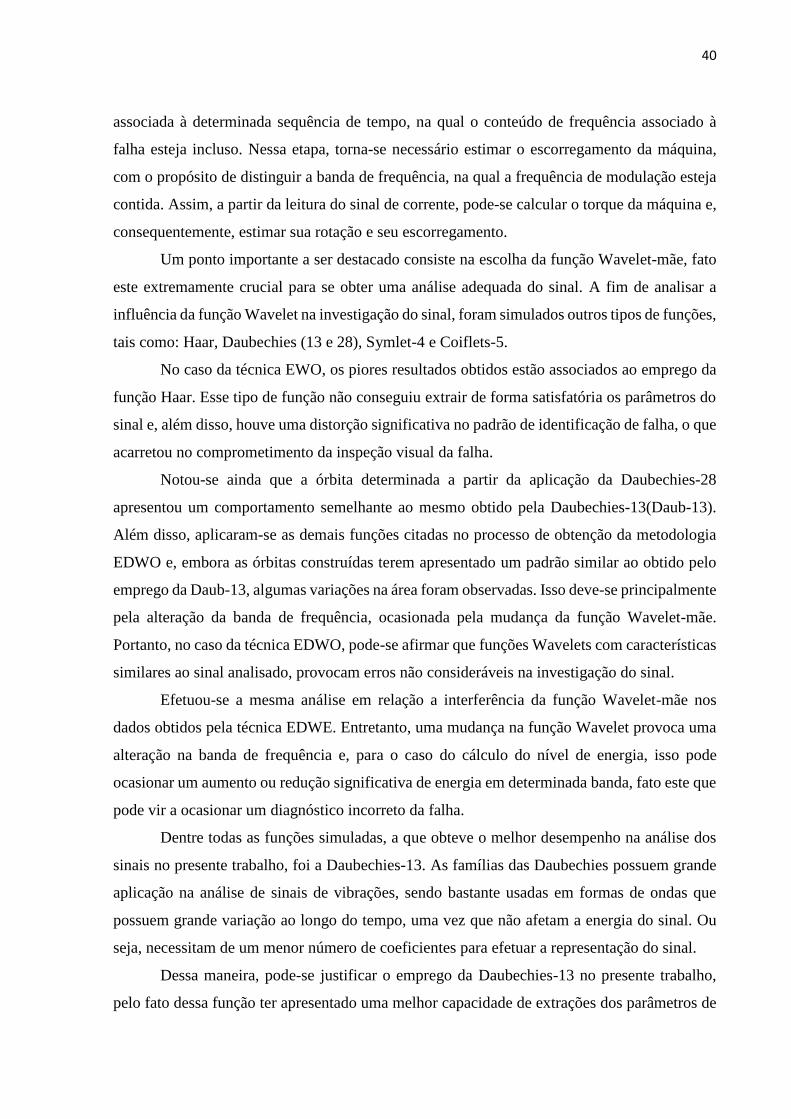
40
associada à determinada sequência de tempo, na qual o conteúdo de frequência associado à
falha esteja incluso. Nessa etapa, torna-se necessário estimar o escorregamento da máquina,
com o propósito de distinguir a banda de frequência, na qual a frequência de modulação esteja
contida. Assim, a partir da leitura do sinal de corrente, pode-se calcular o torque da máquina e,
consequentemente, estimar sua rotação e seu escorregamento.
Um ponto importante a ser destacado consiste na escolha da função Wavelet-mãe, fato
este extremamente crucial para se obter uma análise adequada do sinal. A fim de analisar a
influência da função Wavelet na investigação do sinal, foram simulados outros tipos de funções,
tais como: Haar, Daubechies (13 e 28), Symlet-4 e Coiflets-5.
No caso da técnica EWO, os piores resultados obtidos estão associados ao emprego da
função Haar. Esse tipo de função não conseguiu extrair de forma satisfatória os parâmetros do
sinal e, além disso, houve uma distorção significativa no padrão de identificação de falha, o que
acarretou no comprometimento da inspeção visual da falha.
Notou-se ainda que a órbita determinada a partir da aplicação da Daubechies-28
apresentou um comportamento semelhante ao mesmo obtido pela Daubechies-13(Daub-13).
Além disso, aplicaram-se as demais funções citadas no processo de obtenção da metodologia
EDWO e, embora as órbitas construídas terem apresentado um padrão similar ao obtido pelo
emprego da Daub-13, algumas variações na área foram observadas. Isso deve-se principalmente
pela alteração da banda de frequência, ocasionada pela mudança da função Wavelet-mãe.
Portanto, no caso da técnica EDWO, pode-se afirmar que funções Wavelets com características
similares ao sinal analisado, provocam erros não consideráveis na investigação do sinal.
Efetuou-se a mesma análise em relação a interferência da função Wavelet-mãe nos
dados obtidos pela técnica EDWE. Entretanto, uma mudança na função Wavelet provoca uma
alteração na banda de frequência e, para o caso do cálculo do nível de energia, isso pode
ocasionar um aumento ou redução significativa de energia em determinada banda, fato este que
pode vir a ocasionar um diagnóstico incorreto da falha.
Dentre todas as funções simuladas, a que obteve o melhor desempenho na análise dos
sinais no presente trabalho, foi a Daubechies-13. As famílias das Daubechies possuem grande
aplicação na análise de sinais de vibrações, sendo bastante usadas em formas de ondas que
possuem grande variação ao longo do tempo, uma vez que não afetam a energia do sinal. Ou
seja, necessitam de um menor número de coeficientes para efetuar a representação do sinal.
Dessa maneira, pode-se justificar o emprego da Daubechies-13 no presente trabalho,
pelo fato dessa função ter apresentado uma melhor capacidade de extrações dos parâmetros de
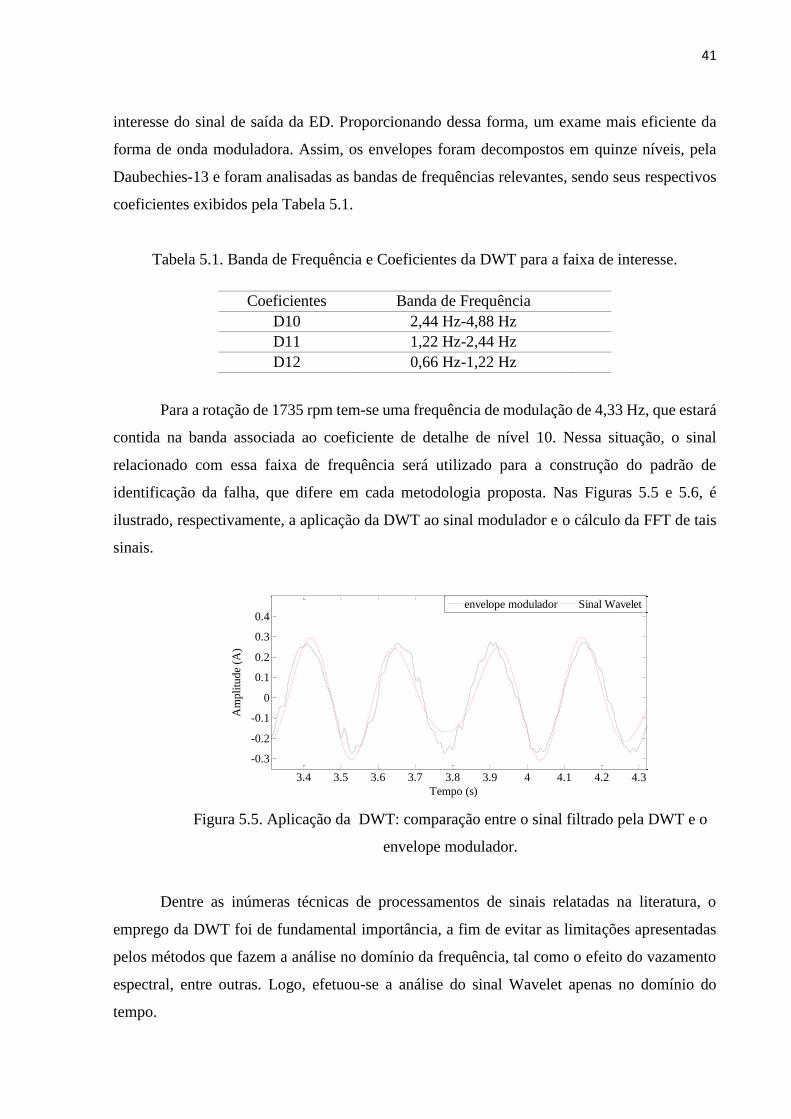
41
interesse do sinal de saída da ED. Proporcionando dessa forma, um exame mais eficiente da
forma de onda moduladora. Assim, os envelopes foram decompostos em quinze níveis, pela
Daubechies-13 e foram analisadas as bandas de frequências relevantes, sendo seus respectivos
coeficientes exibidos pela Tabela 5.1.
Tabela 5.1. Banda de Frequência e Coeficientes da DWT para a faixa de interesse.
Coeficientes Banda de Frequência
D10 2,44 Hz-4,88 Hz
D11 1,22 Hz-2,44 Hz
D12 0,66 Hz-1,22 Hz
Para a rotação de 1735 rpm tem-se uma frequência de modulação de 4,33 Hz, que estará
contida na banda associada ao coeficiente de detalhe de nível 10. Nessa situação, o sinal
relacionado com essa faixa de frequência será utilizado para a construção do padrão de
identificação da falha, que difere em cada metodologia proposta. Nas Figuras 5.5 e 5.6, é
ilustrado, respectivamente, a aplicação da DWT ao sinal modulador e o cálculo da FFT de tais
sinais.
Figura 5.5. Aplicação da DWT: comparação entre o sinal filtrado pela DWT e o
envelope modulador.
Dentre as inúmeras técnicas de processamentos de sinais relatadas na literatura, o
emprego da DWT foi de fundamental importância, a fim de evitar as limitações apresentadas
pelos métodos que fazem a análise no domínio da frequência, tal como o efeito do vazamento
espectral, entre outras. Logo, efetuou-se a análise do sinal Wavelet apenas no domínio do
tempo.
3.4 3.5 3.6 3.7 3.8 3.9 4 4.1 4.2 4.3
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Tempo (s)
Am
pli
tud
e (A
)
envelope modulador Sinal Wavelet
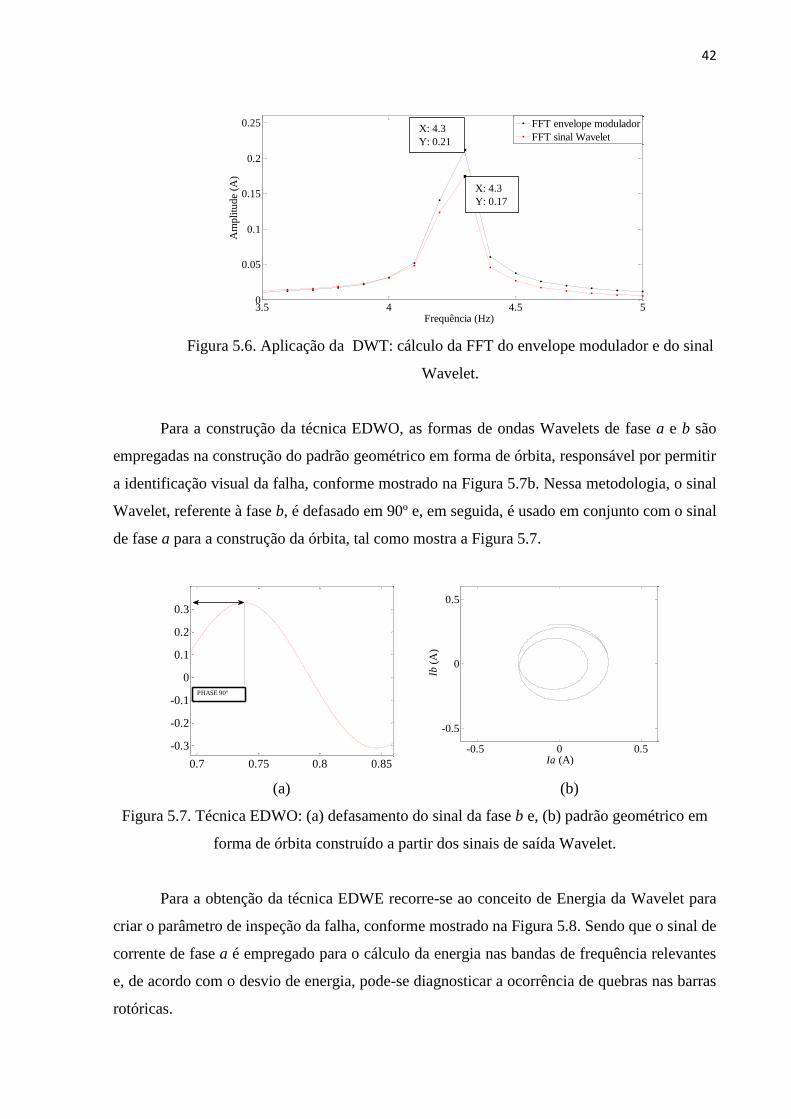
42
Figura 5.6. Aplicação da DWT: cálculo da FFT do envelope modulador e do sinal
Wavelet.
Para a construção da técnica EDWO, as formas de ondas Wavelets de fase a e b são
empregadas na construção do padrão geométrico em forma de órbita, responsável por permitir
a identificação visual da falha, conforme mostrado na Figura 5.7b. Nessa metodologia, o sinal
Wavelet, referente à fase b, é defasado em 90º e, em seguida, é usado em conjunto com o sinal
de fase a para a construção da órbita, tal como mostra a Figura 5.7.
(a) (b)
Figura 5.7. Técnica EDWO: (a) defasamento do sinal da fase b e, (b) padrão geométrico em
forma de órbita construído a partir dos sinais de saída Wavelet.
Para a obtenção da técnica EDWE recorre-se ao conceito de Energia da Wavelet para
criar o parâmetro de inspeção da falha, conforme mostrado na Figura 5.8. Sendo que o sinal de
corrente de fase a é empregado para o cálculo da energia nas bandas de frequência relevantes
e, de acordo com o desvio de energia, pode-se diagnosticar a ocorrência de quebras nas barras
rotóricas.
3.5 4 4.5 50
0.05
0.1
0.15
0.2
0.25
X: 4.3
Y: 0.2115
Am
pli
tude
(A)
Frequência (Hz)
X: 4.3
Y: 0.1738
FFT envelope modulador
FFT sinal Wavelet
0.7 0.75 0.8 0.85
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
PHASE 90º
-0.5 0 0.5
-0.5
0
0.5
Ib (
A)
Ia (A)
X: 4.3
Y: 0.17
X: 4.3
Y: 0.21
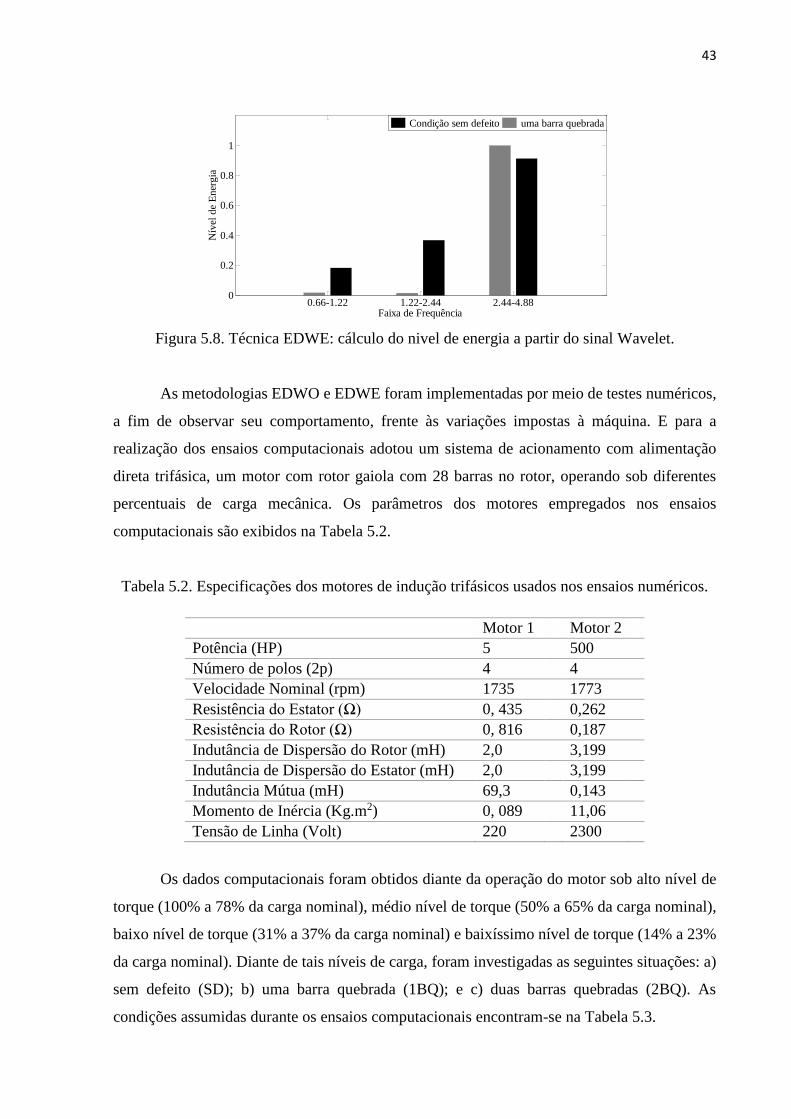
43
Figura 5.8. Técnica EDWE: cálculo do nivel de energia a partir do sinal Wavelet.
As metodologias EDWO e EDWE foram implementadas por meio de testes numéricos,
a fim de observar seu comportamento, frente às variações impostas à máquina. E para a
realização dos ensaios computacionais adotou um sistema de acionamento com alimentação
direta trifásica, um motor com rotor gaiola com 28 barras no rotor, operando sob diferentes
percentuais de carga mecânica. Os parâmetros dos motores empregados nos ensaios
computacionais são exibidos na Tabela 5.2.
Tabela 5.2. Especificações dos motores de indução trifásicos usados nos ensaios numéricos.
Motor 1 Motor 2
Potência (HP) 5 500
Número de polos (2p) 4 4
Velocidade Nominal (rpm) 1735 1773
Resistência do Estator (Ω) 0, 435 0,262
Resistência do Rotor (Ω) 0, 816 0,187
Indutância de Dispersão do Rotor (mH) 2,0 3,199
Indutância de Dispersão do Estator (mH) 2,0 3,199
Indutância Mútua (mH) 69,3 0,143
Momento de Inércia (Kg.m2) 0, 089 11,06
Tensão de Linha (Volt) 220 2300
Os dados computacionais foram obtidos diante da operação do motor sob alto nível de
torque (100% a 78% da carga nominal), médio nível de torque (50% a 65% da carga nominal),
baixo nível de torque (31% a 37% da carga nominal) e baixíssimo nível de torque (14% a 23%
da carga nominal). Diante de tais níveis de carga, foram investigadas as seguintes situações: a)
sem defeito (SD); b) uma barra quebrada (1BQ); e c) duas barras quebradas (2BQ). As
condições assumidas durante os ensaios computacionais encontram-se na Tabela 5.3.
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
ner
gia
Faixa de Frequência
Condição sem defeito uma barra quebrada

44
Tabela 5.3. Dados para o motor 5HP: carga desenvolvida (% da nominal), velocidade
nominal, escorregamento e frequência de modulação.
Carga
(N.m)
Velocidade
(rpm)
Escorregamento
(%)
2𝑠𝑓
(Hz)
100 1735 3,61 4,33
78 1745 3,05 3,66
65 1755 2,50 3,00
51 1765 1,94 2,33
37 1775 1,38 1,66
31 1780 1,11 1,33
23 1785 0,83 1,00
14 1790 0,55 0,66
Os resultados obtidos a partir dos ensaios computacionais, referentes à aplicação de cada
metodologia, são expostos nas seções seguintes.
5.1 Resultados da metodologia EDWO
Nesta seção serão apresentados os dados obtidos a partir da análise computacional da
técnica EDWO. Da Figura 5.9 à Figura 5.12 são exibidas as órbitas construídas diante das
condições de operação especificadas para o motor de 5 HP. As variáveis Ia e Ib correspondem,
respectivamente, às correntes de fase a e b.
(a) (b)
Figura 5.9. Dados simulados. Órbitas dos sinais das correntes Ia e Ib para a
velocidade de: (a) 1735 rpm e (b) 1745 rpm.
-0.5 0 0.5
-0.5
0
0.5
Ia (A)
Ib
(A
)
SD
1BQ
2BQ
-0.5 0 0.5
-0.5
0
0.5
Ia (A)
Ib
(A
)
SD
1BQ
2BQ

45
Nota-se, pelas Figuras 5.9 a 5.12, que a redução do nível de torque provoca um
incremento na velocidade e, consequentemente, isto irá acarretar na diminuição do
escorregamento da máquina. Assim, uma vez que a amplitude da corrente está associada ao
nível de torque, há também uma redução da mesma. Portanto, com o aumento da velocidade
têm-se a diminuição nas áreas das órbitas.
(a) (b)
Figura 5.10. Dados simulados. Órbitas dos sinais das correntes Ia e Ib para a
velocidade de: (a) 1755 rpm e (b) 1765 rpm.
(a) (b)
Figura 5.11. Dados simulados. Órbitas dos sinais das correntes Ia e Ib para a
velocidade de: (a) 1775 rpm e (b) 1780 rpm.
Diante da faixa de velocidade assumida, nota-se uma diferença significativa entre as
condições SD com 1BQ e 2BQ, de maneira que é possível identificar de forma mais nítida, a
presença de quebras nas barras rotóricas, independentemente do nível de torque.
-0.2 -0.1 0 0.1 0.2
-0.2
-0.1
0
0.1
0.2
Ia (A)
Ib
(A
)
SD
1BQ
2BQ
-0.2 -0.1 0 0.1 0.2
-0.2
-0.1
0
0.1
0.2
Ia (A)
Ib
(A
)
SD
1BQ
2BQ
-0.1 0 0.1
-0.1
0
0.1
Ia (A)
Ib
(A
)
SD
1BQ
2BQ
-0.1 0 0.1
-0.1
0
0.1
Ia (A)
Ib
(A
)
SD
1BQ
2BQ
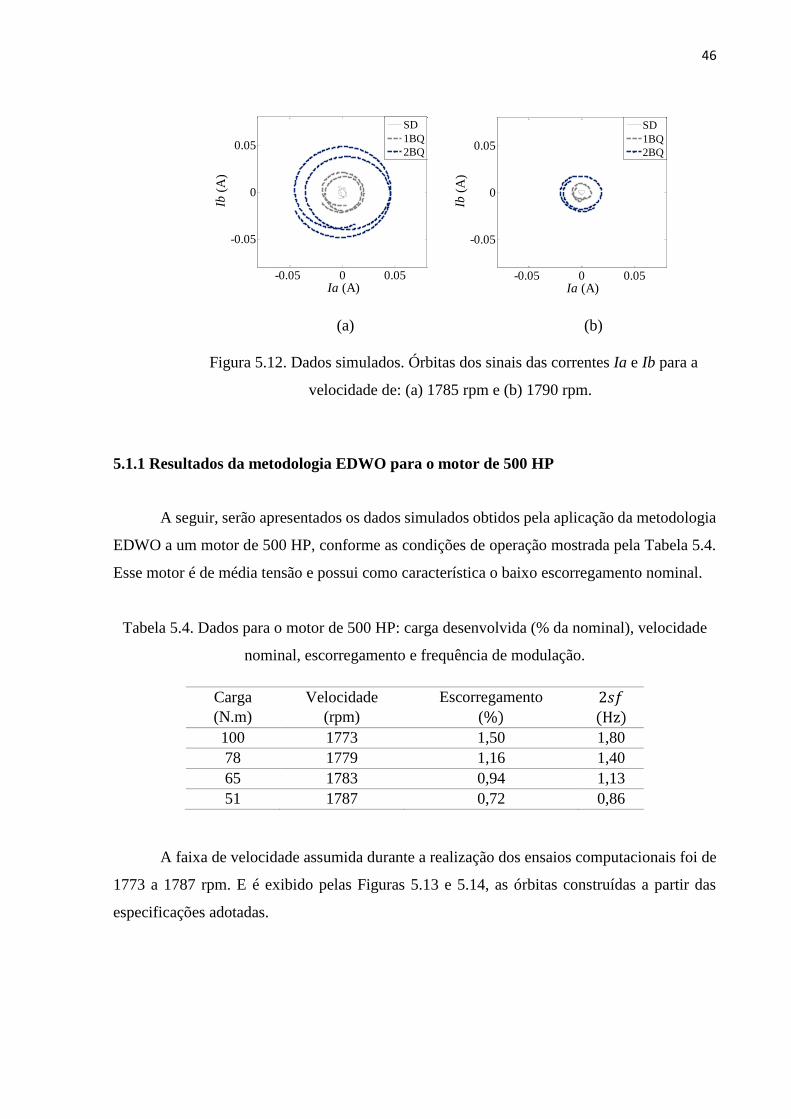
46
(a) (b)
Figura 5.12. Dados simulados. Órbitas dos sinais das correntes Ia e Ib para a
velocidade de: (a) 1785 rpm e (b) 1790 rpm.
5.1.1 Resultados da metodologia EDWO para o motor de 500 HP
A seguir, serão apresentados os dados simulados obtidos pela aplicação da metodologia
EDWO a um motor de 500 HP, conforme as condições de operação mostrada pela Tabela 5.4.
Esse motor é de média tensão e possui como característica o baixo escorregamento nominal.
Tabela 5.4. Dados para o motor de 500 HP: carga desenvolvida (% da nominal), velocidade
nominal, escorregamento e frequência de modulação.
Carga
(N.m)
Velocidade
(rpm)
Escorregamento
(%)
2𝑠𝑓
(Hz)
100 1773 1,50 1,80
78 1779 1,16 1,40
65 1783 0,94 1,13
51 1787 0,72 0,86
A faixa de velocidade assumida durante a realização dos ensaios computacionais foi de
1773 a 1787 rpm. E é exibido pelas Figuras 5.13 e 5.14, as órbitas construídas a partir das
especificações adotadas.
-0.05 0 0.05
-0.05
0
0.05
Ia (A)
Ib
(A
)
SD
1BQ
2BQ
-0.05 0 0.05
-0.05
0
0.05
Ia (A)
Ib
(A
)
SD
1BQ
2BQ

47
(a) (b)
Figura 5.13. Dados simulados. Órbitas dos sinais das correntes Ia e Ib para a velocidade de:
(a) 1773 rpm e (b) 1779 rpm.
(a) (b)
Figura 5.14. Dados simulados. Órbitas dos sinais das correntes Ia e Ib para a velocidade de:
(a) 1783 rpm e (b) 1787 rpm.
Nota-se que os resultados obtidos possuem um comportamento similar aos dados
simulados apresentado pelo motor de 5 HP.
5.1.2 Relação do número de ciclo e índice de severidade da falha
Observou-se a existência de uma relação entre o número de voltas ou ciclos da órbita
com a variação do nível de torque, que é justificada pelo incremento na velocidade provocado
pela redução do torque. Devido a isso, há uma diminuição do escorregamento e, uma vez que a
-40 -20 0 20 40
-40
-20
0
20
40
Ia (A)
Ib
(A
)
SD
1BQ
2BQ
-40 -20 0 20 40
-40
-20
0
20
40
Ia (A)
Ib
(A
)
SD
1BQ
2BQ
-10 -5 0 5 10
-10
-5
0
5
10
Ia (A)
Ib
(A
)
SD
1BQ
2BQ
-10 -5 0 5 10
-10
-5
0
5
10
Ia (A)
Ib
(A
)
SD
1BQ
2BQ

48
frequência do rotor (𝑠𝑓) está relacionada de forma direta com o escorregamento, ela também
irá sofrer as mesmas variações.
Assim, uma vez que o período do sinal modulador é dado pelo inverso de duas vezes a
frequência do rotor (2𝑠𝑓), tem-se um aumento do período desse sinal com o decréscimo do
nível de torque. Portanto, o número de ciclos ou voltas geradas pela forma de onda modulada
será bem menor durante o mesmo tempo de aquisição usado para amostrar os dados diante da
condição saudável. Dessa forma, pode-se afirmar que a redução no torque promove a
diminuição do número de ciclos presentes na órbita, conforme mostrado nas Tabelas 5.5 e 5.6.
Foi observado um aumento significativo nas áreas das órbitas, à medida que o número
de quebras nas barras do rotor gaiola é incrementado. Diante desse fato, criou-se um índice para
determinar a severidade da falha. Como as órbitas obtidas a partir dos ensaios numéricos não
apresentam uma forma circular perfeita, adotou-se como parâmetro, para fins de cálculos do
critério de severidade, o comprimento entre o ponto máximo e mínimo (em relação ao eixo x),
tal como mostra a Figura 5.15.
Figura 5.15. Comprimento da circunferência para cálculo do índice de severidade.
A formulação do índice de severidade é definida pela Equação 5.1.
𝐼 = (𝐿
𝐿𝑟𝑒𝑓)100
(5.1)
Em que o parâmetro 𝐿𝑟𝑒𝑓 representa o comprimento de referência, diante da condição saudável
e 𝐿 consiste no comprimento obtido para a situação defeituosa.
Os resultados obtidos, exibidos nas Tabelas 5.5 e 5.6, mostram que o índice de
severidade consiste em um excelente parâmetro quantitativo para o diagnóstico de barras
quebradas.
(𝑥𝑚𝑖𝑛, 0) (𝑥𝑚𝑎𝑥, 0) (0,0)
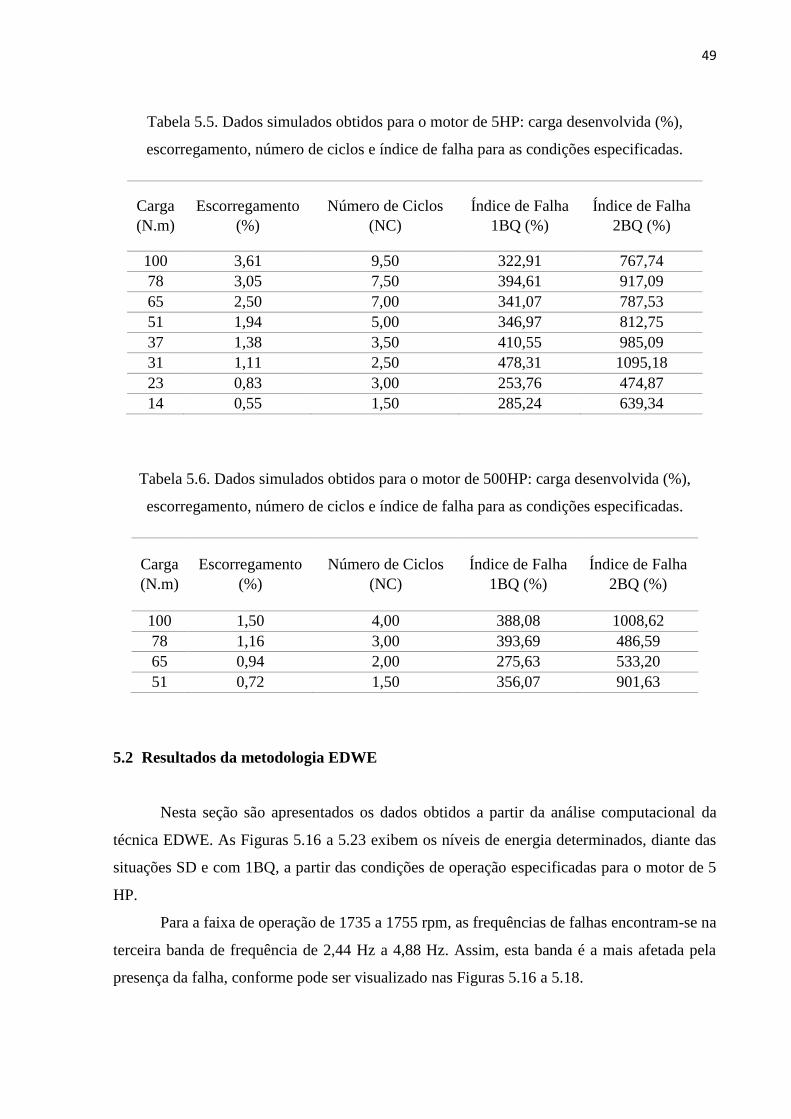
49
Tabela 5.5. Dados simulados obtidos para o motor de 5HP: carga desenvolvida (%),
escorregamento, número de ciclos e índice de falha para as condições especificadas.
Carga
(N.m)
Escorregamento
(%)
Número de Ciclos
(NC)
Índice de Falha
1BQ (%)
Índice de Falha
2BQ (%)
100 3,61 9,50 322,91 767,74
78 3,05 7,50 394,61 917,09
65 2,50 7,00 341,07 787,53
51 1,94 5,00 346,97 812,75
37 1,38 3,50 410,55 985,09
31 1,11 2,50 478,31 1095,18
23 0,83 3,00 253,76 474,87
14 0,55 1,50 285,24 639,34
Tabela 5.6. Dados simulados obtidos para o motor de 500HP: carga desenvolvida (%),
escorregamento, número de ciclos e índice de falha para as condições especificadas.
Carga
(N.m)
Escorregamento
(%)
Número de Ciclos
(NC)
Índice de Falha
1BQ (%)
Índice de Falha
2BQ (%)
100 1,50 4,00 388,08 1008,62
78 1,16 3,00 393,69 486,59
65 0,94 2,00 275,63 533,20
51 0,72 1,50 356,07 901,63
5.2 Resultados da metodologia EDWE
Nesta seção são apresentados os dados obtidos a partir da análise computacional da
técnica EDWE. As Figuras 5.16 a 5.23 exibem os níveis de energia determinados, diante das
situações SD e com 1BQ, a partir das condições de operação especificadas para o motor de 5
HP.
Para a faixa de operação de 1735 a 1755 rpm, as frequências de falhas encontram-se na
terceira banda de frequência de 2,44 Hz a 4,88 Hz. Assim, esta banda é a mais afetada pela
presença da falha, conforme pode ser visualizado nas Figuras 5.16 a 5.18.

50
Figura 5.16. Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob
1735 rpm.
Figura 5.17. Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob
1745 rpm.
Figura 5.18. Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob
1755 rpm.
Nas Figuras 5.19 a 5.21, observa-se um maior nível de energia associado ao intervalo
de frequência de 1,22 a 2,44 Hz, para a faixa de velocidade de 1765 a 1780 rpm.
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ
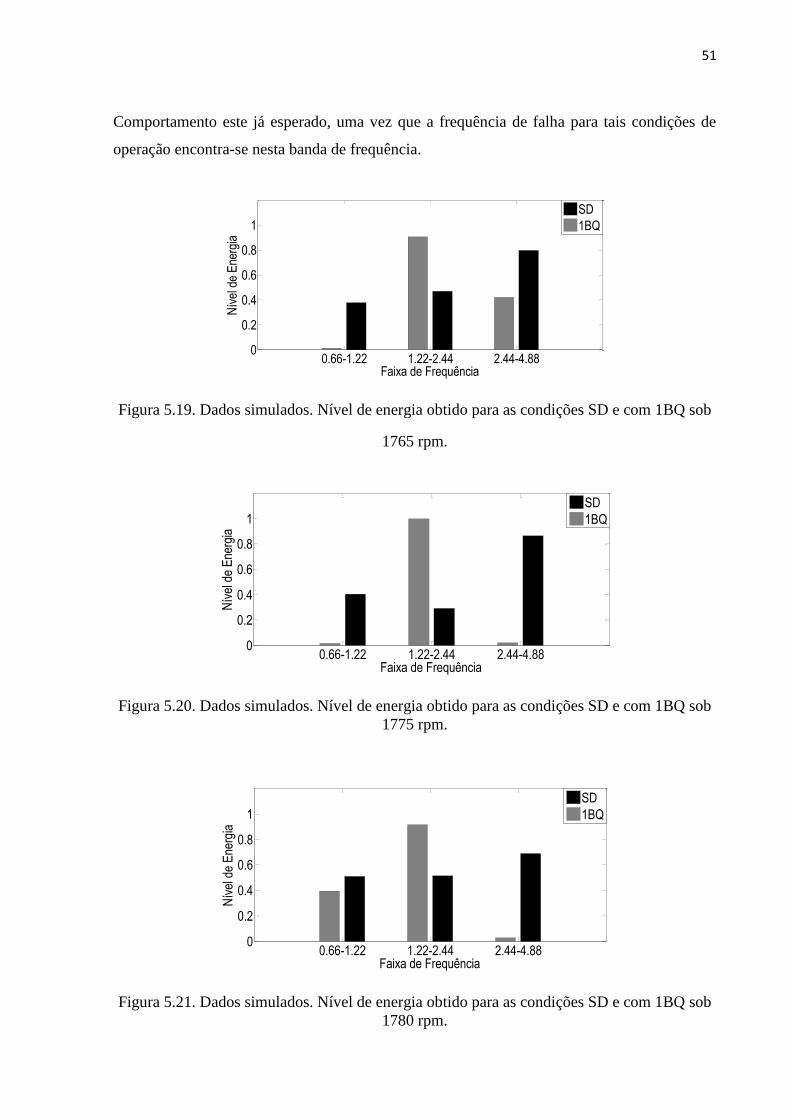
51
Comportamento este já esperado, uma vez que a frequência de falha para tais condições de
operação encontra-se nesta banda de frequência.
Figura 5.19. Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob
1765 rpm.
Figura 5.20. Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob
1775 rpm.
Figura 5.21. Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob
1780 rpm.
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1N
ível
de
Ene
rgia
Faixa de Frequência
SD
1BQ
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Faixa de Frequência
Nív
el d
e E
nerg
ia
SD
1BQ
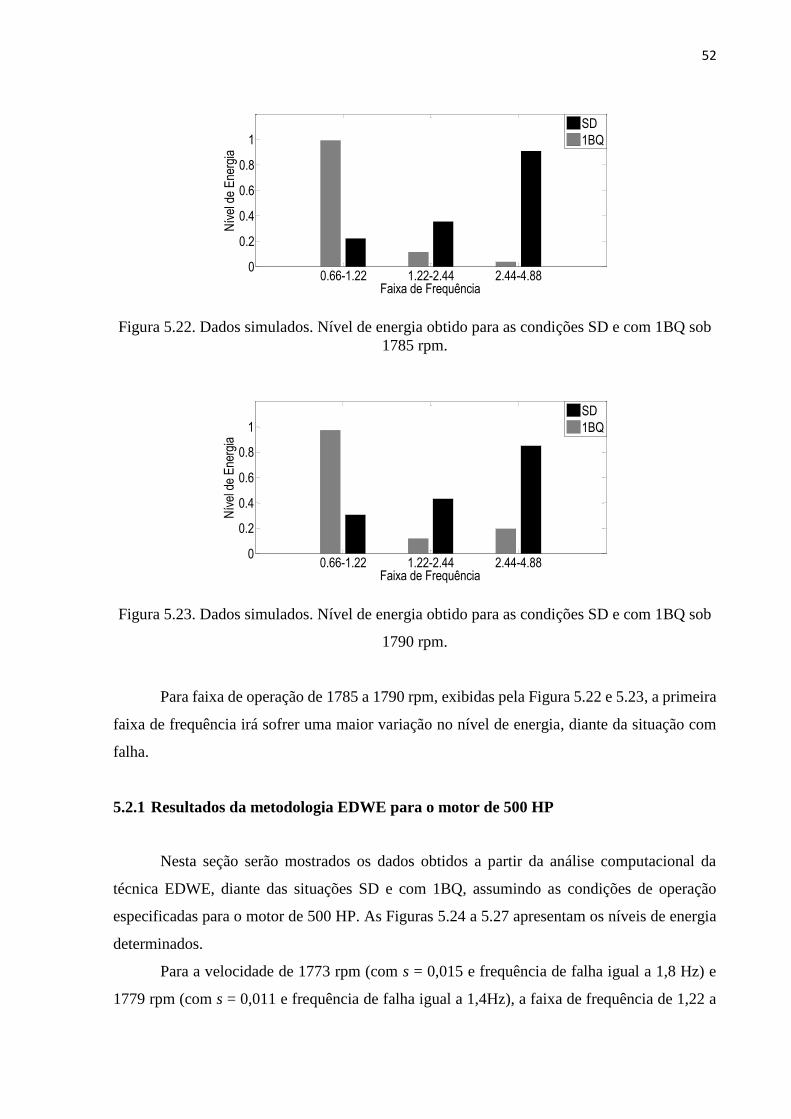
52
Figura 5.22. Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob
1785 rpm.
Figura 5.23. Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob
1790 rpm.
Para faixa de operação de 1785 a 1790 rpm, exibidas pela Figura 5.22 e 5.23, a primeira
faixa de frequência irá sofrer uma maior variação no nível de energia, diante da situação com
falha.
5.2.1 Resultados da metodologia EDWE para o motor de 500 HP
Nesta seção serão mostrados os dados obtidos a partir da análise computacional da
técnica EDWE, diante das situações SD e com 1BQ, assumindo as condições de operação
especificadas para o motor de 500 HP. As Figuras 5.24 a 5.27 apresentam os níveis de energia
determinados.
Para a velocidade de 1773 rpm (com s = 0,015 e frequência de falha igual a 1,8 Hz) e
1779 rpm (com s = 0,011 e frequência de falha igual a 1,4Hz), a faixa de frequência de 1,22 a
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ

53
2,44 Hz é mais suscetível às mudanças provocadas pela falha, como pode ser visualizado nas
Figuras 5.24 e 5.25.
Figura 5.24. Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob
1773 rpm.
Figura 5.25. Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob
1779 rpm.
Figura 5.26. Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob
1783 rpm.
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1N
ível
de
Ene
rgia
Faixa de Frequência
SD
1BQ
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ

54
Nas condições de 1783 rpm (com s = 0,009 e frequência de falha igual a 1,13 Hz) e 1787
rpm (com s = 0,007 e frequência de falha igual a 0,86 Hz) tem-se uma maior variação do nível
de energia na primeira largura de banda, diante da presença de defeito.
Figura 5.27. Dados simulados. Nível de energia obtido para as condições SD e com 1BQ sob
1787 rpm.
Portanto, de acordo com as análises realizadas, nota-se que há variações significativas
de energia nas bandas de frequências em que o componente de falha está contido.
Particularmente, para esse motor de média tensão, as faixas de frequências que sofreram
alterações significativas correspondem às bandas de 0,66 a 1,22 Hz e 1,22 a 2,44 Hz.
5.3 Conclusão
Neste capítulo, duas novas metodologias de detecção e diagnóstico de falhas em barras
do rotor, baseadas na técnica ED e na clássica DWT, foram apresentadas. A partir do emprego
do modelo dinâmico da gaiola do rotor, descrito no Capítulo 4, tornou-se possível investigar o
comportamento de tais metodologias, antes de sua implementação prática. Analisou-se ainda o
desempenho de tais técnicas, frente às variações das condições de operação impostas à máquina,
por meio do uso de dois motores de indução com diferentes especificações.
Durante o processo de análise dos dados obtidos, comprovou-se que a escolha da função
Wavelet-mãe adequada constitui em um fator crucial e fundamental para se obter resultados
corretos e coerentes. E, a fim de investigar a influência da função Wavelet no desempenho das
técnicas EDWO e EDWE, diversas outras funções foram testadas. No entanto, a que obteve um
melhor resultado foi a Daubechies-13.
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ

55
Conforme os resultados apresentados nas metodologias, pode-se diagnosticar quebras
nas barras do rotor, de forma independente da condição de operação da máquina.
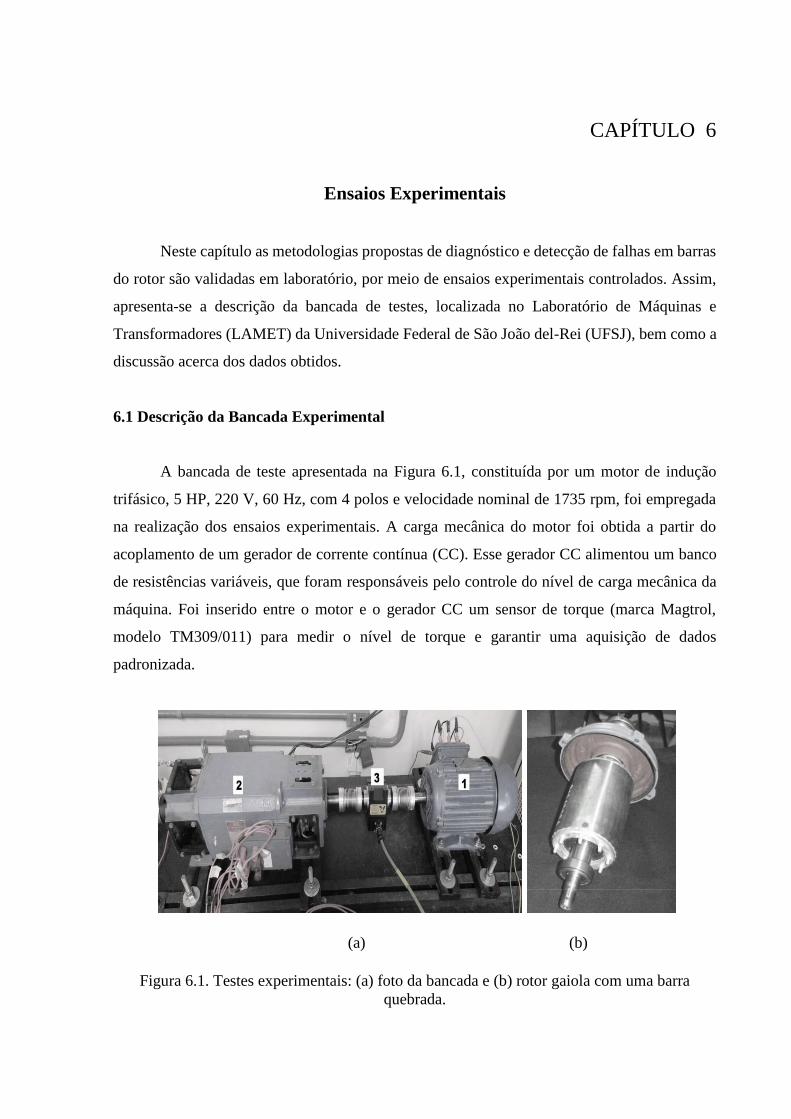
CAPÍTULO 6
Ensaios Experimentais
Neste capítulo as metodologias propostas de diagnóstico e detecção de falhas em barras
do rotor são validadas em laboratório, por meio de ensaios experimentais controlados. Assim,
apresenta-se a descrição da bancada de testes, localizada no Laboratório de Máquinas e
Transformadores (LAMET) da Universidade Federal de São João del-Rei (UFSJ), bem como a
discussão acerca dos dados obtidos.
6.1 Descrição da Bancada Experimental
A bancada de teste apresentada na Figura 6.1, constituída por um motor de indução
trifásico, 5 HP, 220 V, 60 Hz, com 4 polos e velocidade nominal de 1735 rpm, foi empregada
na realização dos ensaios experimentais. A carga mecânica do motor foi obtida a partir do
acoplamento de um gerador de corrente contínua (CC). Esse gerador CC alimentou um banco
de resistências variáveis, que foram responsáveis pelo controle do nível de carga mecânica da
máquina. Foi inserido entre o motor e o gerador CC um sensor de torque (marca Magtrol,
modelo TM309/011) para medir o nível de torque e garantir uma aquisição de dados
padronizada.
(a) (b)
Figura 6.1. Testes experimentais: (a) foto da bancada e (b) rotor gaiola com uma barra
quebrada.
57
Para a aquisição de dados, dois sensores de corrente de efeito Hall (LEM, modelo LTA-
50P) foram conectados em placa PCI-6013 da National Instruments, integrada em um
computador. Essa placa possui 16 canais analógicos de entrada independentes que permitem
amostrar a uma taxa de 200 kS/s, com 16 bits de resolução. As medições dos sinais foram
comandadas via algoritmo implementado no software Matlab, a uma frequência de 5 kHz,
durante 20 segundos, gerando um total de 100.000 amostras. A Figura 6.2 mostra o sistema de
medição dos sinais de correntes.
Figura 6.2. Foto do sistema de medição dos sinais de corrente.
Para efeitos de comparação as condições de operação do motor e de aquisição dos sinais
são iguais ao que foi adotado na simulação numérica, como descrito na seção 5.1. Sob o mesmo
nível de carga foram efetuados 10 testes para cada situação, a saber: sem defeito (SD) e com
falha devido à inserção de uma barra quebrada (1BQ). Uma barra do rotor foi danificada com
uma broca de diâmetro de 5 mm, como mostra a Figura 6.1(b), a fim de simular a situação com
defeito. As condições de operações adotadas foram expostas na Tabela 5.3.
6.2 Resultados experimentais da metodologia EDWO
As Figuras 6.3 a 6.6 mostram os resultados experimentais obtidos para análise de barras
quebradas, diante da aplicação da metodologia EDWO.
Nota-se que o padrão geométrico das órbitas, diante das simulações numéricas
apresentadas na seção 5.2, são similares aos obtidos nos testes experimentais. Observa-se
também que quanto maior o nível de carga do motor, menor será a velocidade assumida e,

58
consequentemente, maior será o escorregamento. Portanto, tem-se para um mesmo tempo de
aquisição um maior número de ciclos ou de voltas compondo a órbita. O número de ciclos, bem
como o índice de severidade, determinados para os dados experimentais são expostos, na Tabela
6.1.
(a) (b)
Figura 6.3. Dados reais. Órbita dos sinais de corrente Ia e Ib para a velocidade de:
(a) 1735 rpm e (b) 1745 rpm.
(a) (b)
Figura 6.4. Dados reais. Órbitas dos sinais de correntes Ia e Ib para a velocidade de:
(a) 1755 rpm e (b)1765 rpm.
-0.1 0 0.1
-0.1
0
0.1
Ia (A)
Ib
(A
)
SD
1BQ
-0.1 0 0.1
-0.1
0
0.1
Ia (A) I
b (
A)
SD
1BQ
-0.1 0 0.1
-0.1
0
0.1
Ia (A)
Ib
(A
)
SD
1BQ
-0.1 0 0.1
-0.1
0
0.1
Ia (A)
Ib
(A
)
SD
1BQ
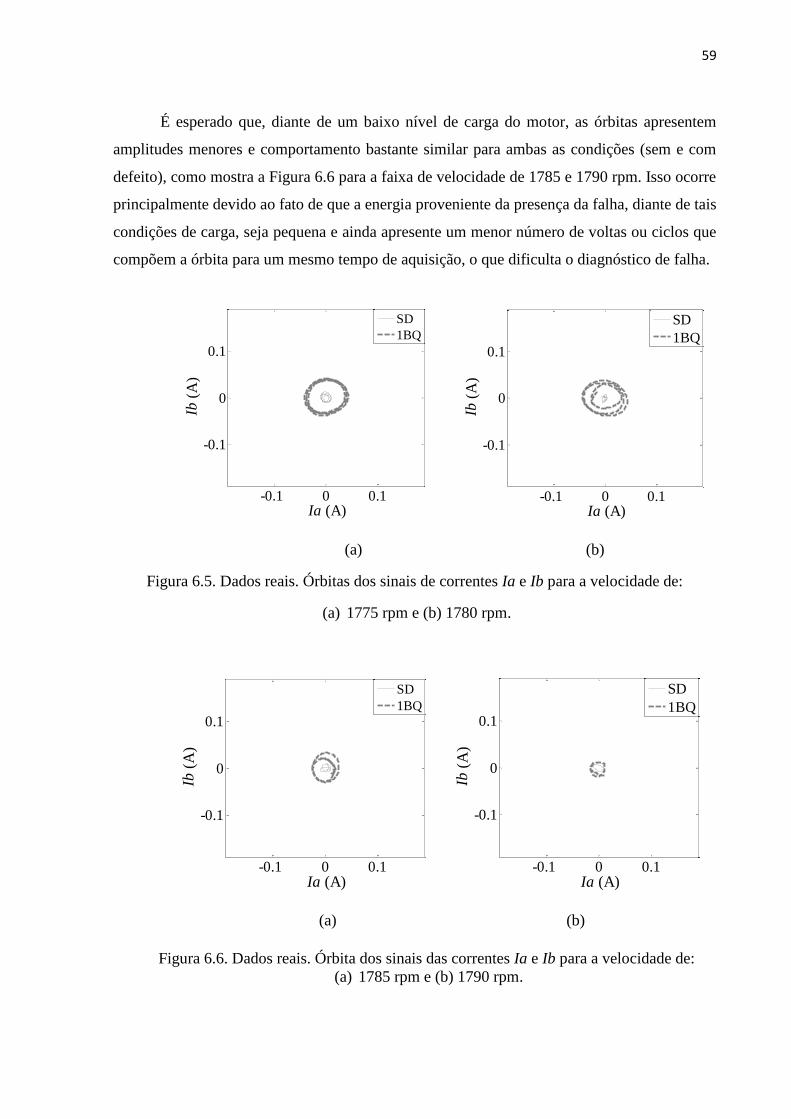
59
É esperado que, diante de um baixo nível de carga do motor, as órbitas apresentem
amplitudes menores e comportamento bastante similar para ambas as condições (sem e com
defeito), como mostra a Figura 6.6 para a faixa de velocidade de 1785 e 1790 rpm. Isso ocorre
principalmente devido ao fato de que a energia proveniente da presença da falha, diante de tais
condições de carga, seja pequena e ainda apresente um menor número de voltas ou ciclos que
compõem a órbita para um mesmo tempo de aquisição, o que dificulta o diagnóstico de falha.
(a) (b)
Figura 6.5. Dados reais. Órbitas dos sinais de correntes Ia e Ib para a velocidade de:
(a) 1775 rpm e (b) 1780 rpm.
(a) (b)
Figura 6.6. Dados reais. Órbita dos sinais das correntes Ia e Ib para a velocidade de:
(a) 1785 rpm e (b) 1790 rpm.
-0.1 0 0.1
-0.1
0
0.1
Ia (A)
Ib
(A
)
SD
1BQ
-0.1 0 0.1
-0.1
0
0.1
Ib
(A
)
Ia (A)
SD
1BQ
-0.1 0 0.1
-0.1
0
0.1
Ia (A)
Ib
(A
)
SD
1BQ
-0.1 0 0.1
-0.1
0
0.1
Ia (A)
Ib
(A
)
SD
1BQ
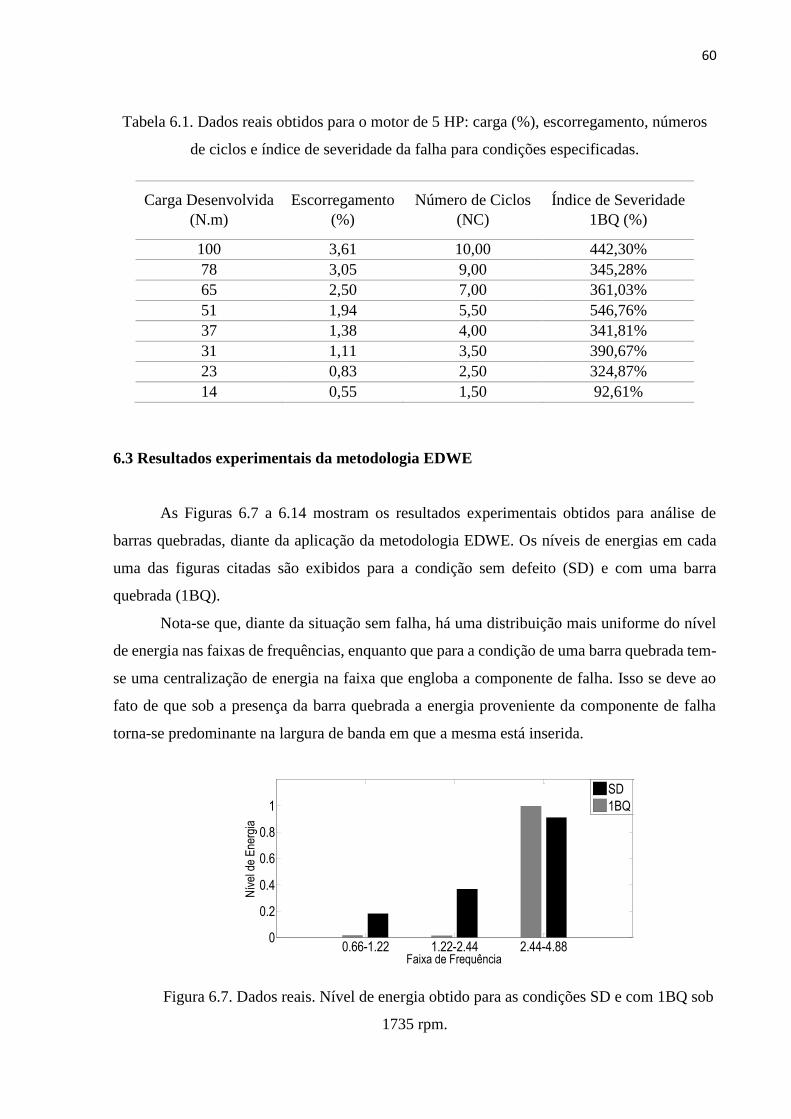
60
Tabela 6.1. Dados reais obtidos para o motor de 5 HP: carga (%), escorregamento, números
de ciclos e índice de severidade da falha para condições especificadas.
Carga Desenvolvida
(N.m)
Escorregamento
(%)
Número de Ciclos
(NC)
Índice de Severidade
1BQ (%)
100 3,61 10,00 442,30%
78 3,05 9,00 345,28%
65 2,50 7,00 361,03%
51 1,94 5,50 546,76%
37 1,38 4,00 341,81%
31 1,11 3,50 390,67%
23 0,83 2,50 324,87%
14 0,55 1,50 92,61%
6.3 Resultados experimentais da metodologia EDWE
As Figuras 6.7 a 6.14 mostram os resultados experimentais obtidos para análise de
barras quebradas, diante da aplicação da metodologia EDWE. Os níveis de energias em cada
uma das figuras citadas são exibidos para a condição sem defeito (SD) e com uma barra
quebrada (1BQ).
Nota-se que, diante da situação sem falha, há uma distribuição mais uniforme do nível
de energia nas faixas de frequências, enquanto que para a condição de uma barra quebrada tem-
se uma centralização de energia na faixa que engloba a componente de falha. Isso se deve ao
fato de que sob a presença da barra quebrada a energia proveniente da componente de falha
torna-se predominante na largura de banda em que a mesma está inserida.
Figura 6.7. Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob
1735 rpm.
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ
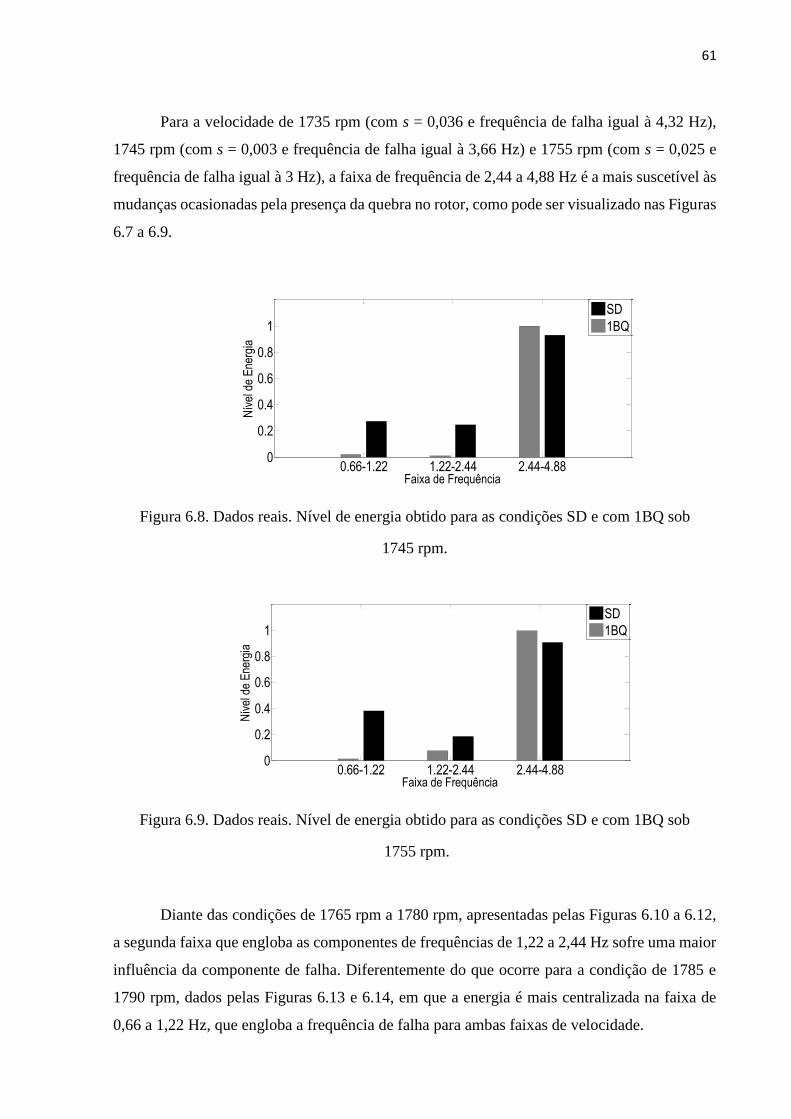
61
Para a velocidade de 1735 rpm (com s = 0,036 e frequência de falha igual à 4,32 Hz),
1745 rpm (com s = 0,003 e frequência de falha igual à 3,66 Hz) e 1755 rpm (com s = 0,025 e
frequência de falha igual à 3 Hz), a faixa de frequência de 2,44 a 4,88 Hz é a mais suscetível às
mudanças ocasionadas pela presença da quebra no rotor, como pode ser visualizado nas Figuras
6.7 a 6.9.
Figura 6.8. Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob
1745 rpm.
Figura 6.9. Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob
1755 rpm.
Diante das condições de 1765 rpm a 1780 rpm, apresentadas pelas Figuras 6.10 a 6.12,
a segunda faixa que engloba as componentes de frequências de 1,22 a 2,44 Hz sofre uma maior
influência da componente de falha. Diferentemente do que ocorre para a condição de 1785 e
1790 rpm, dados pelas Figuras 6.13 e 6.14, em que a energia é mais centralizada na faixa de
0,66 a 1,22 Hz, que engloba a frequência de falha para ambas faixas de velocidade.
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ
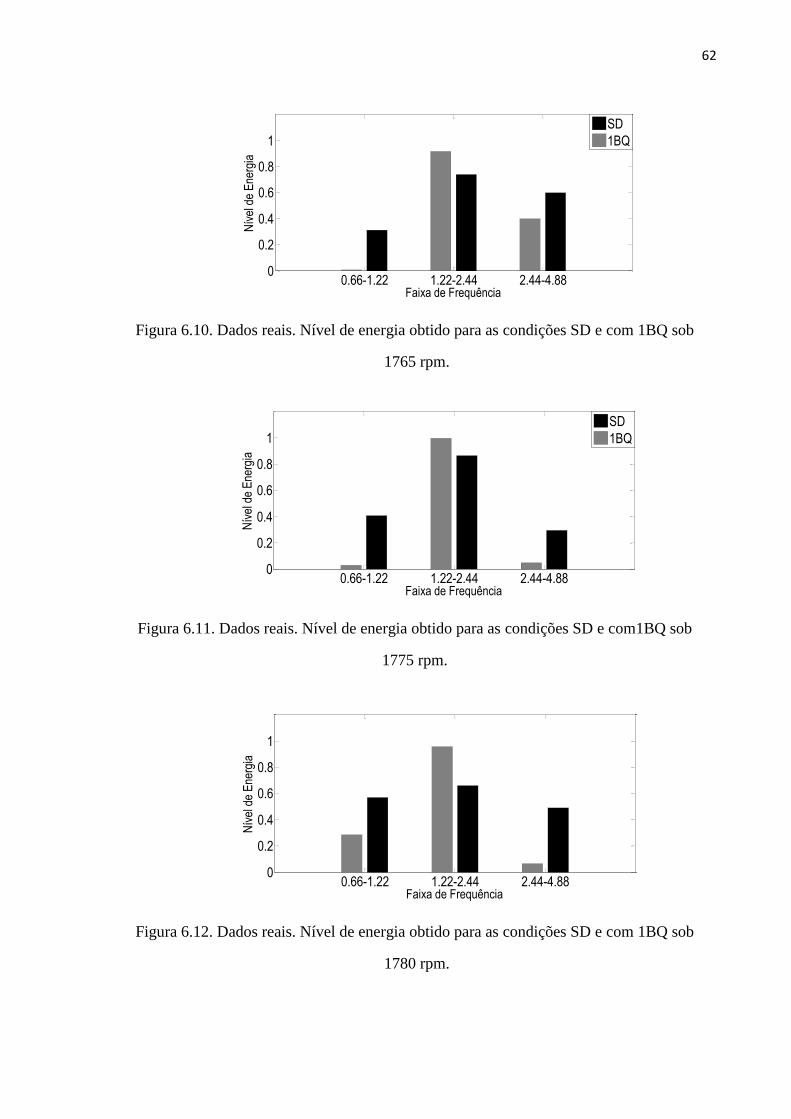
62
Figura 6.10. Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob
1765 rpm.
Figura 6.11. Dados reais. Nível de energia obtido para as condições SD e com1BQ sob
1775 rpm.
Figura 6.12. Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob
1780 rpm.
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Faixa de Frequência
Nív
el d
e E
nerg
ia
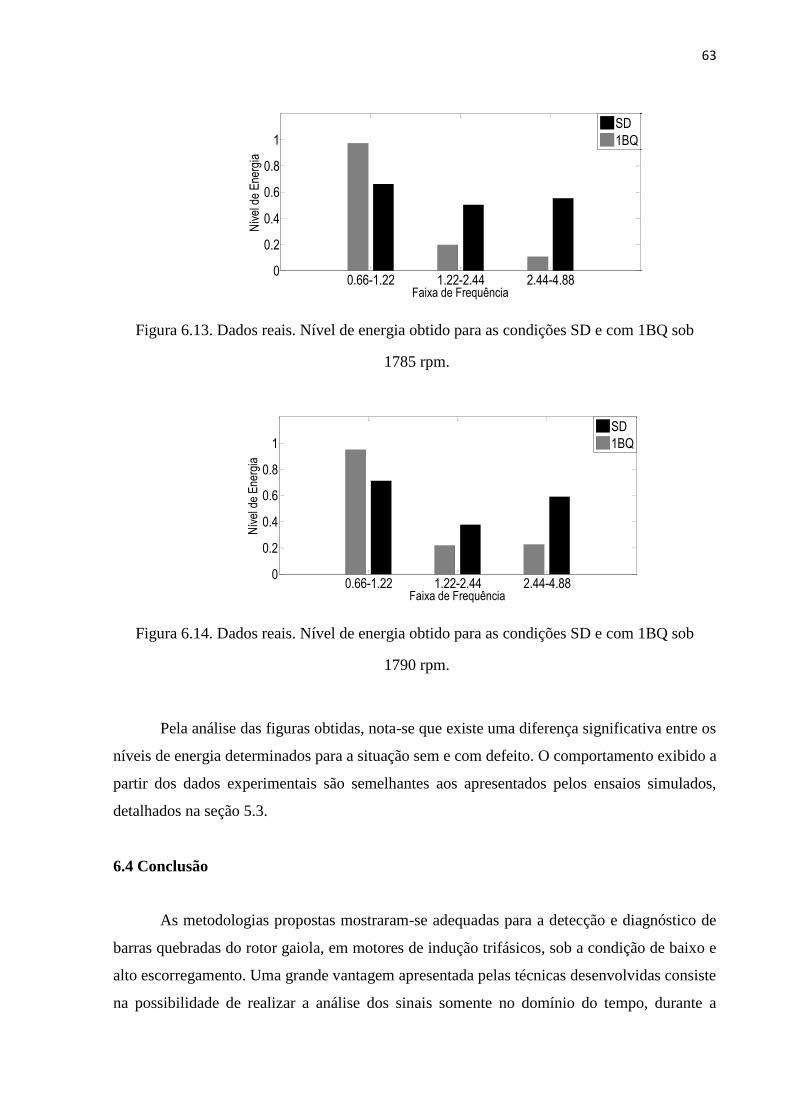
63
Figura 6.13. Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob
1785 rpm.
Figura 6.14. Dados reais. Nível de energia obtido para as condições SD e com 1BQ sob
1790 rpm.
Pela análise das figuras obtidas, nota-se que existe uma diferença significativa entre os
níveis de energia determinados para a situação sem e com defeito. O comportamento exibido a
partir dos dados experimentais são semelhantes aos apresentados pelos ensaios simulados,
detalhados na seção 5.3.
6.4 Conclusão
As metodologias propostas mostraram-se adequadas para a detecção e diagnóstico de
barras quebradas do rotor gaiola, em motores de indução trifásicos, sob a condição de baixo e
alto escorregamento. Uma grande vantagem apresentada pelas técnicas desenvolvidas consiste
na possibilidade de realizar a análise dos sinais somente no domínio do tempo, durante a
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ
0.66-1.22 1.22-2.44 2.44-4.880
0.2
0.4
0.6
0.8
1
Nív
el d
e E
nerg
ia
Faixa de Frequência
SD
1BQ
64
execução de todo o processo, fato este que difere dos métodos clássicos, tais como a MCSA e
a HT.
Outros pontos a serem destacados consiste na necessidade de um baixo tempo de
aquisição e independência do nível de carga para efetuar o diagnóstico correto da falha e ainda,
a possibilidade de aplicação das técnicas, quando o motor estiver operando com cargas variáveis
e pulsantes. Fatores estes que tornam os métodos propostos em ferramentas atraentes e
alternativas para a realização do diagnóstico de quebras nas barras do rotor.
O critério de quantificação da falha, introduzido pela técnica EDWO, tornou-se um
importante e efetivo parâmetro para a diferenciação entre a situação saudável e defeituosa.
Além disso, permitiu-se determinar a intensidade da falha.
No método EDWE a variação do nível da Energia da Wavelet possibilitou identificar,
de forma distinta, as condições com e sem quebra nas barras do rotor.
Portanto, os resultados experimentais obtidos mostraram um bom desempenho das
técnicas propostas para detecção de falhas no rotor gaiola em motores elétricos. Os métodos
propostos são simples, de fácil aplicação prática, de modo que podem ser implementados em
qualquer planta industrial, uma vez que requerem apenas a medição dos sinais de correntes do
motor.
CAPÍTULO 7
Conclusões
Devido à importância dos motores de indução trifásicos nos processos industriais e
levando-se em consideração os efeitos ocasionados pela presença das quebras nas barras
rotóricas ao seu funcionamento, torna-se importante desenvolver métodos de diagnóstico e
detecção de falhas nas barras do rotor, afim de evitar danos à cadeia produtiva e o aumento de
custos.
Nesse contexto e em virtude das limitações apresentadas pelo método clássico relatadas
na literatura, este trabalho propôs o desenvolvimento de novas metodologias de detecção e
diagnóstico de falhas no rotor gaiola.
As técnicas propostas baseiam-se na clássica Transformada Discreta de Wavelet e na
Demodulação Empírica e recorrem à análise do sinal de corrente do motor para realizar o
diagnóstico. Dessa forma, a ED é aplicada para efetuar o processo de demodulação, a fim de
obter o envelope, que é responsável por transmitir importantes características relacionadas ao
conteúdo de frequência da falha. E a DWT foi usada para delimitar e decompor o envelope em
diferentes bandas de frequência, de modo que fosse possível examinar as variações ocorridas
nos sinais que englobasse o conteúdo de componente de frequência da falha, diante da condição
saudável e defeituosa.
A partir da aplicação da ED e da DWT, criou-se dois importantes parâmetros para a
visualização da barra quebrada. Na técnica proposta EDWO, o padrão de identificação da falha
consistiu na inspeção da órbita, enquanto que a técnica EDWE baseou-se no conceito da
Energia da Wavelet para avaliar os sinais de corrente, sob a situação sem e com quebra nas
barras.
Para a validação das metodologias propostas foi adquirido o sinal de corrente de um
motor de indução trifásico, a partir de uma bancada experimental. Diante disso, foram
realizados diversos ensaios, sob a condição simétrica e com uma barra quebrada, assumindo
uma ampla faixa de variação da carga. Os resultados obtidos permitiram comprovar o bom
desempenho das técnicas investigadas.
As metodologias desenvolvidas para a detecção e diagnóstico de barras quebradas
apresentaram como principal vantagem a possibilidade de efetuar todo o processo de análise do
66
sinal no domínio do tempo, o que implica na independência da resolução em frequência e do
tempo de aquisição para efetuar o diagnóstico correto, diante das condições de alto e baixo
escorregamento. Outro ponto a ser destacado trata-se da aplicabilidade dos métodos propostos
na análise de sinais não-estacionários.
Diante desses fatores, as técnicas de detecção e diagnóstico apresentadas no presente
trabalho consistem em abordagens alternativas para a identificação de quebras nas barras do
rotor e, além disso, podem ser facilmente implementadas e utilizadas em sistemas de
monitoramento online de falhas.
Com base nos estudos realizados, sugere-se para trabalhos futuros:
aplicar as metodologias desenvolvidas no diagnóstico de outras falhas, como curto-circuito,
rolamentos, entre outras;
obter dados de motores em operação com inversores de frequência e analisar o
comportamento de tais técnicas;
simular e analisar o desempenho de tais metodologias, diante do uso de motores com dupla
gaiola;
investigar o comportamento dos métodos para o diagnóstico em regimes transientes;
propor um método de estimação de velocidade em conjunto com a implementação das
técnicas desenvolvidas,
desenvolver um novo índice de severidade da falha na técnica EDWO por meio da aplicação
de PCA (Principal Component Analysis techniques).
7.1 Publicações
Alves, D.A., Baccarini, L.R., Filho, P.C.M.L, e Batista, F.B. (2016). Método de Detecção de
Falhas em Barras do Rotor Baseado na Metodologia Hilbert-Park. In: XXI Congresso Brasileiro
de Automática. Setembro de 2016. ISSN:2525-8311.
67
Referências Bibliográficas
Águas, A. G. (2013). Otimização de um sistema online de detecção de falhas em motores de
indução. Dissertação de Mestrado. Faculdade de Ciências e Tecnologia (FCT),
Universidade Nova de Lisboa, Setembro 2013.
Ahamed, S.K., Sarkar, A., Mitra, M., e Sengupta, S. (2014). Novel Approach for Detection of
Inter-Turn Short Circuit of Induction Motor’s Stator Winding through Envelopes Analysis.
8th International Conference on Electrical and Computer Engineering (ICECE), 20-22
Dec., 2014.
Antonino-Daviu, J., Jover, P., Riera-Guasp, M., Arkkio, A., e Pineda-Sanchez, M. (2008).
Complementary diagnosis of rotor asymmetrier through the tracing of the Right Sideband
Component in the stator startup current. Proceedings of the 2008 International Conference
on Electrical Machines, 6-9 Sept., 2008.
Baccarini, L.M.R. (2005). Detecção e Diagnóstico de falhas em Motores de Indução. Tese de
Doutorado, Universidade Federal de Minas Gerais.
Barendse, P.S., e Pillay, P. A. (2006). New Algorithm for the Detection of Faults in Permanent
Magnet Machines. IEEE 32nd Annual Industrial Eletronics Conference on-IECON, 6-10
Nov., 2006.
Batista, F.B., Lamim Filho, P.C.M., Pederiva, R., e Silva, V.A.D. (2016). An Empirical
Demodulation for Electrical Fault Detection in Induction Motors. IEEE Transactions on
Instrumentation and Measurement, 65(3):559-569.
Bellini, A., Franceschini, G., e Tassoni, C. (2006). Monitoring of induction Machines by
maximum covariance method for frequency tracking. IEEE Transactions on Industry
Applications, 42(1):69-78.
Bessam, B., Menacer, A., Boumehraz, M., e Cherif, H. (2015). DWT and Hilbert Transform
for Broken Rotor Bar Fault Diagnosis in Induction Machines at Low Load. International
Conference on Technologies and Materials for Renewable Energy, Environment and
Sustainability.
Bucher, H. F. (2001). Metodologias para a aplicação de técnicas tempo-frequência em
dinâmica estrutural e ao método dos elementos de contorno. Tese de Doutorado,
Universidade Federal do Rio de Janeiro.
Cabanas, M.F. (2011). Unambiguos detection of broken bars in asynchronous motors by means
of a flux measurement-based procedure. IEEE Transactions on Instrumentation and
Measurement, 60(3):891-899.
68
Capolino, G-A., Kia, S.H., e Henao, H. (2007). A High-Resolution Frequency Estimation
Method for Three-Phase Induction Machine Fault Detection. IEEE Transactions on
Industrial Eletronics, 54(4):2305-2314.
Capolino, G-A., Kia, S.H., e Henao, H. (2009). Diagnosis of Broken-Bar Fault in Induction
Machines Using Discrete Wavelet Transform Without Slip Estimation. IEEE Transactions
on Industry Applications, 45(4):1395-1404.
Capolino, G-A., Kia, S.H., e Henao, H.(2011). Some Digital Processing Techniques for
Induction Machines Diagnosis. IEEE International Symposium on Diagnostics for Electric
Machines, Power Eletronics & Drives (SDEMPED), 5-8 Sept., 2011.
Climent-Alarcon, V., Antonino-Daviu, J.A., Haavisto, A., e Arkkio, A. (2014). Diagnosis
of Induction Machines under Varying Speed Operation by Principal Slot Harmonic
Tracking. 2014 International Conference on Eletrical Machines (ICEM), 2-5 Sept., 2014.
Cui, L.L., Gao, L.X., e Guo-Dong,W. (2007). Research on the Demodulation Method based
on the Wavelet Analysis. Proceedings of the 2007 International Conference on Wavelet
Analysis and Pattern Recognition Technology, 2-4 Nov., 2007.
Cunha, C.C.M. (2006). Modelagem, Análise e Detecção Assimetrias de Rotor em Máquinas de
Indução. Tese de Doutorado, Universidade Federal de Minas Gerais.
Cusidó, J., Romeral, L., Ortega, J.A., Rosero e Espinosa, A.G. (2008). Fault Detection in
Induction Machines Using Power Spectral Density in Wavelet Decomposition. IEEE
Transactions on Industrial Eletronics, 55(2):633-643.
Dahi, K., Elbani, S., Guedira, S., Sadiki, L., e Ouachtouk, I. (2015). High-Resolution Spectral
Analysis Method to Identify Rotor Faults in WRIM using Neural Voltage.1st International
Conference on Electrical and Information Tecnologies (ICET), 25-27 Mar., 2015.
Douglas, H., Pillay, I.P., e Ziarani. (2005). Broken Rotor Bar Detection in Induction Machines
With Transient Operating Speeds. IEEE Transactions on Energy Conversion, 20(1):135-
144.
Du, C., Gui,W., e Hu, Z. (2012). Empirical Mode Decomposition and Hilbert Spectrum
Analysis Based Bearing Faults Diagnosis. International Conference on Information Scienc
and Control Engineering, 7-9 Dec., 2012.
Espinosa, A.G., Cusidó, J., Romeral, L., Ortega, J.A., e Rosero, J.A. (2008). Fault Detection
in Inductions Machines Using Power Spectral Density in Wavelet Decomposition. IEEE
Transactions on Industrial Eletronics, 55(2):633-643.

69
Faiz, J., Ghorbanian, V., e Ebrahimi, B.M. (2014). EMD-Based Analysis of Industrial
Induction Motors With Broken Rotor Bars for Identification of Operation Point at Different
Supply Modes. IEEE Transactions on Industrial Informatics, 10(2):957-966.
Fanucchi, R. Z. (2014). A Detecção e a Localização de Faltas de Alta impedância em Sistemas
de Distribuição utilizando Transformadas Wavelets e Redes Neurais Artificais. Dissertação,
Universidade Federal de São Paulo.
Fernandez-Cavero, V., Morinigo-Sotelo, D., Duque-Perez, O., e Pons-Llinares, J. (2015).
Fault Detection in Inverter-fed Induction Motors in Transient Regime: State of the Art.
IEEE 10th International Symposium on Diagnostics for Eletrical Machines, Power
Electronics and Drives (SDEMPED), 1-4 Sept., 2015.
Ferreira, F. J.T.E., e Almeida, A. T. (2016). Energy Savings Potential Associated with Stator
Winding Connection Mode Change in Induction Motors. XXII International Conference on
Electrical Machines (ICEM), 4-7 Sept., 2016.
Foito, D.J.M. (2015). Detecção e Diagnóstico de Falhas em Sistemas de Acionamento com
Máquinas de Indução Hexafásicas. Tese de Doutorado. Universidade Nova de Lisboa.
Filho, P.C.M.L., Pederiva, R., e Brito, J.N. (2014). Detection of stator winding faults in
induction machines using flux and vibration analysis. Mechanical System Signal
Processing, 42(1-2):377–387.
Fiser, R., Drobnic, K., Lavric, H., Nernec, M., Ambrozic, V., e Makuc, D. (2013). Induction
Motor Parameters in Case of Rotor Electrical Asymmetry. IEEE Workshop on Eletrical
Machines Design Control and Diagnosis (WEMDCD), 11-12 Mar., 2013.
Gaeid, K.S., Ping, H.W., Khalid, M., e Salih, A.L. (2011). Fault Diagnosis of Induction Motor
Using MCSA and FFT. Electrical and Electronic Engineering, 1(2):85-92.
Georgoulas, G., Karvelis, P., Cysostomos, D., e Tsoumas, I.P. (2014). Automatizing the
broken bar detection process via Short Time Fourier Transform and two-dimensional
Piecewise Aggregate Approximation representation. IEEE Energy Conversion Congress
and Exposition (ECCE), 14-18 Sept., 2014.
Gritli, Y., Lee, S.B., Fillippeti, F., e Zarri, L. (2014). Advacend Diagnosis of Outer Cage
Damage in Double-Squirrel-Cage Induction Motors Under Time-Varying Conditions Based
on Wavelet Analysis. IEEE Industry Applications, 50(3):1791-1800.
Hamdad, N., e Hammouche, K. (2015). Hilbert Huang Transform and Pattern Recognition to
detect defects in induction motor. 4th International Conference on Electrical Engineering
(ICEE), 13-15 Dec., 2015.

70
Hou, L e Bergamnn, N.W. (2012). Novel industrial wireless sensor networks for machine
condition monitoring and fault diagnosis. IEEE Transactions Instrumental Measurement,
61(10):2787–2798.
Keskes, H., Braham, A., e Lachirib, Z. (2013). Broken rotor bar diagnosis in induction machines
through stationary wavelet packet transform and multiclass wavelet SVM. Eletric Power
Systems Research, 97(1):151-157.
Keskes, H., Braham, A., e Lachirib, Z. (2015). Diagnosis of Broken Rotor Bar in Induction
Machines using Picth Synchronous Wavelet Transform. 4th International Conference on
Power Engineering, Energy and Electrical Drives, May 2015.
Kia, S.H., Henao, H., e Capolino, G-A. (2013). Efficient Digital Signal Processing Techniques
for Induction Machines Fault Diagnosis. 2013 IEEE Workshop on Electrical Machines
Design Control and Diagnosis(WEMDCD), 11-12 Marc., 2013.
Konar, P., e Chattopadhyay, P. (2013). Mechanical Fault Diagnosis of Induction Motor using
Hilbert Pattern. IEEE 1st International Conference on Condition Assesment Techniques in
Electrical Systems., 6-8 Dec., 2013.
Krause, Paul C. et al. Analysis of electric machinery and drive, 2002.
Liu, T., e Huang, J. (2005). A novel method for induction motors stator interturn short circuit
fault diagnosis by wavelet packet analysis. IEEE Transactions on Electrical Machines and
Systems, 3(1):2254-2258.
Lu, B., Gao, Z., e Benzing, J. (2013). Pratical Aspects of Rotor Cage Fault Detection for
Medium-Voltage Induction Motors. IEEE Industry Applications Society Annual Meeting,
6-11 Oct., 2013.
Mabrouk, A.E., e Zouzou, S.E. (2015). Diagnosis of rotor faults in three- phases induction
motors under time-varying loads. IEEE 10th International Symposium on Diagnostics for
Electrical Machines, Power Eletronics and Drives (SDEMPED), 1-4 Sept., 2015.
Marques, J.R. (2013). Aplicação da Transformada de Hilbert-Huang na Análise das Vibrações
dos Motores de Induçaõ de Máquinas Ferramentas. Tese de Doutorado, Universidade de
São Paulo.
Mata-Castrejón, P.V., Villegas-Ortega, A., Asiain-Olivares, T. I., e Ruiz-Veja, D. (2015).
Evalution of Progressive Deterioration of a Squirrel-Cage Rotor, with a Condition
Monitoring System that Implements the SideBand Methodology. IEEE International
Autumm Meeting on Power, Electronics and Computing (ROPEC), 4-6 Nov., 2015.

71
Mehrjou, M.R., Mariun, N., Karami, M., Misron, N., e Radzi, M.A.M. (2014). Perfomance
Analysis of Line-Start Permanent Magnet synchronous Motor in Presence of Rotor Fault.
IEEE Student Conference on Research and Development (SCORed), 16-17 Dec., 2014.
Mehrjou, M.R., Mariun, N., Karami, M., Misron, N., e Radzi, M.A.M. (2015). Statistical
Features Analysis of Transient Current Signal for Broken Bars Faults Detection in LS-
PMSMs. Proc. of the IEEE 3rd International Conference on Smart Instrumentation,
Measurement and Applications (ICSIMA, 2015), 24-25 Nov., 2015.
Mohanty, A.R., e Kar, C. (2006). Fault Detection in a Multistage Gearbox by Demodulation
of Motor Current Waveform. IEEE Transactions on Industrial Eletronics, 53(4):1285-
1297.
Morales-Caporal, R., Valles-Novo, R., e Rangel-Magdaleno, J. de J. (2014). Broken Bar
Detection on Squirrel Cage Induction Motors with MCSA and EMD. Proceedings of the
2014 IEEE International Instrumentation and Measurement Technology Conference
(I2MTC), 12-15 May, 2014.
Naha, A., Samant, A.K., Routray, A., e Deb, A.K. (2016). A Method for Detecting Half-
Broken Rotor Bar in Lightly in Loaded Induction Motors Using Current. IEEE Transactions
on Instrumentation and Measurement, 65(7):1614-1625.
Nandi, S., Toliyat, H.A., e Li, X. (2005). Condition Monitoring and Fault Diagnosis of Eletrical
Motors-A Review. IEEE Transactions on Energy Conversion, 20(4):719:729.
Nemec, M., Drobnic, K., Nedeljkovi, D., Fiser, R., e Ambrozic, V. (2010). Detection of
Broken Bars in Motor Through the Analysis of Supply Voltage Modulation. IEEE
Transactions on Industrial Electronics, 57(8):2879-2888.
Oumaamar, M.E.K., Khezzar, A., Boucherma, M., Razik, A., Andriamalala, R.N., e Bagli,
L. (2007). Neutral Voltage Analysis for Broken Rotor Bars Detection in Induction Motors
Using Hilbert Transform Phase. IEEE Industry App. Conference 42nd IAS Annual Metting.
Conference Record of the 2007, 23-27 Sept., 2007.
Pezzani, C., Donolo, P., Bossio, G., Bossio, M., Guzmán, A., e Zocholl, S.E. (2014).
Detecting Broken Rotor Bars Zero-Setting Protection. IEEE Transactions on Industrial and
Applications, 50(2):1373-1384.
Pons-Llinares, J., Morinigo-Sotelo, D., Duque-Perez, O., Antonino-Daviu, J., e Perez-Alonso,
M.(2014). Transient Detection of Close Components through the Chirplet Transform: Rotor
Faults in Inverter-Fed Induction Motors. (2014). 40th Annual Conference of the Industrial
Eletronics Society (IECON), 29 Oct-1 Nov., 2014.
72
Puche-Panadero, R., Pineda-Sanchez, M., Riera-Guasp, M., Roger-Folch, J., Hurtado-Perez,
E., e Perez-Cruz, J. (2009). Improved Resolution of the MCSA Method Via Hilbert
Transform, Enabling the Diagnosis of Rotor Asymmetries at Very Low Slip. IEEE
Transactions on Energy Conversion, 24(1):52-59.
Radecki, A., Debowski, A., Wójcik, M., e Lipnicki, M. (2016). Evaluation of a Diagnostic
Information on Common Electrical Faults Contained in Signals of an Inverter-Fed AC IM
Drive with Current-Oriented Control. 10th International Conference on Compatibility,
Power Electronics and Power Engineering (CPE-POWERENG), 29 June-1 July 2016.
Romero-Trancoso, R.J., Morinigo-Stelo, D., Duque-Perez, O., Osornio-Rios, R.A., Ibarra-
Manzano, M.A., e Garcia-Perez, A. (2014). Broken Rotor Bar Detection in VSD-fed
Induction Motors at Startup by High-Resolution Spectral Analysis. IEEE International
Conference on Electrical Machines (ICEM), 2-5 Sept., 2014.
Sapena-Bãno, A., Puche-Panadero, R., Pineda-Sanchez, M., Martinez-Roman, J., e Kanovic,
Z. (2015). Low-Cost Diagnosis of Rotor Asymmetries in Induction Machines Working at a
Very Low Slip Using the Reduced Envelope of the Stator Current. IEEE Transactions on
Energy Conversion, 30(4):1409-1419.
Sapena-Bãno, A., Puche-Panadero, R., Pineda-Sanchez, M., Martinez-Roman, J., R-Guasp,
M. e Roger-Folch, J. (2014). Condition monitoring of electrical machines using low
computing power devices. International Conference on Electrical Machines (ICEM), 2-5
Sept., 2014.
Sapena-Bãno, A., Perez-Cruz, J., Puche-Panadero, R., Pineda-Sanchez, M., Martinez-Roman,
J., R-Guasp, M. e Roger-Folch, J. (2015). Harmonic Order Tracking Analysis: A Novel
Method for Fault Diagnosis in Induction Machines. IEEE Transactions on Energy
Conversion, 30(3):833-841.
Singh, G., Kumar, Ch.A., e Naikan, V.N.A. (2015). Effectiveness of Current Envelope
Analysis to Detect Broken Rotor Bar an Inter Turn Fault in an Inverter Fed Induction Motor
Drive. 2015 International Conference on Power and Advanced Control Engineering
(ICPACE), 12-14 Aug., 2015.
Su, H., e Chong, K.T. (2007). Induction Machine Condition Monitoring Using Neural Network
Modeling. IEEE Transactions on Industrial Eletronics, 54(1):241-249.
Thakur, A.K., e Kundu, P.K. (2016). Authentication of unknown fault for a three-phase
induction motor by stator current spectral analysis. 2nd International Conference on Control,
Instrumentation, Energy & Communication (CIEC), 28-30 Jan., 2016.
73
Valles-Novo, R., Rangel-Magdaleno, J.J., Ramirez-Cortez, J.M., e Peregrina, H. (2015).
Empirical Mode Decomposition Analysis for Broken-Bar Detection on Squirrel Cage
Induction Motors. IEEE Transactions Instrumentation and Measurement, 64(5):1118-1128.
Wang, X., e Fang, F. (2011). Bearing Failure Diagnosis in three-phase Induction Motor by
Chirp-Z Transform and Zoom-Music. 2011 International Conference on Electrical and
Control Engineering (ICECE), 16-18 Sept., 2011.
Xingzhi, L., Zhou, W., Xin, X., Zhirong, L., e Lin, H. (2013). Application of Wavelet packet
and Hilbert operator to the fault diagnosis of rolling bearing. 5th International Conference
on Mensuaring Technology and Mechatronics Automation, 2013.
Xu, B., Sun, L., Xu, L., e Xu, G. (2013). Improvement of the Hilbert Method via Esprit for
Detecting Rotor Fault in Induction Motors at Low Slip. IEEE Transactions on Energy
Conversion, 28(1):225-233.
Yan, Ruqiang., e Gao, R.X. (2006). Hilbert-Huang Transform-Based Vibration Signal
Analysis for Machine Health Monitoring. IEEE Transactions on Instrumentation and
Measurement, 55(6):2320-2329.
Ying, Xie. (2012). Investigation of Broken Rotor Bar Faults in Three-Phase Squirrel-Cage
Induction Motors. INTECH Open Acess Publisher, ISBN 9535104748, 9789535104742.
Zarader, J.L., Garnier, M., e Nicollet, M. (1997). New frequency filtering zoom. International
Journal of Adaptive Control and Signal Processing, 6(1):547-560.
Zhang, P., Du, Y., Habetler, T.G., e Lu, B. (2011). A Survey of Condition Monitoring and
Protection Methods for Medium-Voltage Inductions Motors. IEEE Transactions on
Industry Applications, 47(1):34-46.

74
Apêndice A
A matriz de transformação 𝑇𝑑𝑞 pode ser obtida por meio de um algoritmo de fácil
implementação, uma vez que seu cálculo depende apenas do número total de barras (𝑛) que
compõem a gaiola do rotor da máquina. Para o caso de uma máquina de 2 pólos, a matriz 𝑇𝑑𝑞
é determinada de acordo com o sistema matricial representado por:
[𝑇𝑑𝑞] = [𝐾𝑏][𝑀]
(𝐴. 1)
Sendo que as matrizes 𝐾𝑏 e 𝑀 são calculadas, respectivamente, pelas Equações A.2 e
A.3.
𝐾𝑏 =𝑛 − 1
𝑛
(𝐴. 2)
𝑀 =
[ cos(𝜃) cos (𝜃 −
2𝜋
𝑛) cos (𝜃 −
4𝜋
𝑛) … . cos (𝜃 −
𝑛 − 1
𝑛 2𝜋)
sin(𝜃) sin (𝜃 −2𝜋
𝑛) sin (𝜃 −
4𝜋
𝑛) … . sin (𝜃 −
𝑛 − 1
𝑛 2𝜋)
𝑏31 𝑏32 𝑏33 … . 𝑏3𝑛
𝑏41 𝑏42 . … . 𝑏4𝑛
: : : : :: : : : :
𝑏𝑛1 𝑏𝑛2 … . … . . 𝑏𝑛𝑛
]
(𝐴. 3)
As duas primeiras linhas que compõem a matriz 𝑀 correspondem à transformação das
grandezas, associadas com cada barra do rotor para o sistema de coordenadas dq, de forma a
garantir que os sinais de correntes apresentem amplitudes iguais para ambos os sistemas de
referência adotados no regime senoidal (Cunha, 2006). Além disso, essas duas linhas irão
formar dois vetores linearmente independentes, que constituíram uma nova submatriz
denominada:
𝑀𝑑𝑞 = [cos(𝜃) cos (𝜃 −
2𝜋
𝑛) cos (𝜃 −
4𝜋
𝑛) … . cos (𝜃 −
𝑛−1
𝑛 2𝜋)
sin(𝜃) sin (𝜃 −2𝜋
𝑛) sin (𝜃 −
4𝜋
𝑛) … . sin (𝜃 −
𝑛−1
𝑛 2𝜋)
]
(𝐴. 4)
75
Uma vez que os vetores que compõem esta submatriz são linearmente independentes,
𝑀𝑑𝑞 possui um espaço nulo de dimensão 2𝑛 e posto (𝑛 − 2). Assim, a base definida para esse
espaço nulo é determinada por uma matriz não-nula, de dimensão (𝑛 − 2)𝑛, conforme expresso
pela Equação 𝐴. 5.
[𝑀𝑑𝑞][𝐵] = 0
(𝐴. 5)
Como citado por Cunha (2006), existe uma relação entre o espaço nulo de 𝑀𝑑𝑞 e as
componentes de sequência zero de determinado sistema de 𝑙 fases. Assim, a determinação da
base do espaço nulo de 𝑀𝑑𝑞 está correlacionada à obtenção de (𝑛 − 2) vetores de sequência
zero, linearmente independente, conforme expresso na Equação 𝐴. 5.
Desse modo, com o intuito de definir a base do espaço nulo de 𝑀𝑑𝑞, adota-se valor zero
para a variável 𝜃, de maneira que a Equação 𝐴. 5 torna-se igual a:
[1 cos (−
2𝜋
𝑛) cos (−
4𝜋
𝑛) … . cos (−
𝑛 − 1
𝑛2𝜋)
0 sin (−2𝜋
𝑛) sin (−
4𝜋
𝑛) … . sin (−
𝑛 − 1
𝑛 2𝜋)
]
[ 𝑏𝑖1
𝑏𝑖2
𝑏𝑖𝑗
:𝑏𝑖𝑛]
= 0
(𝐴. 6)
Isolando os termos 𝑏𝑖1 e 𝑏𝑖2 do lado direito, pode-se reescrever a equação acima, de
acordo com a seguinte expressão:
[𝑏𝑖1
𝑏𝑖2] = − [
1 cos (−2𝜋
𝑛)
0 sin (−2𝜋
𝑛)
]
−1
[cos (−
4𝜋
𝑛) … . cos (−
𝑛 − 1
𝑛2𝜋)
sin (−4𝜋
𝑛) … . sin (−
𝑛 − 1
𝑛 2𝜋)
]
[ 𝑏𝑖3
𝑏𝑖4
::
𝑏𝑖𝑛]
(𝐴. 7)
A fim de efetuar os cálculos dos termos da matriz 𝐵, atribui-se as variáveis 𝑖 =
3, …… , 𝑛 e 𝑗 = 1,…… , 𝑛.
Pode-se especificar de forma arbitrária os coeficientes 𝑏𝑖𝑛, de modo que para valores
de 𝑖 iguais a 𝑗, a Equação 𝐴. 8 deverá ser satisfeita:
𝑏𝑖𝑗 = 1 (𝐴. 8)

76
E para os casos em que (𝑖 ≅ 𝑗), atribuir-se a:
𝑏𝑖𝑗 = 0
(𝐴. 9)
Assim, para 𝑖 = 3 e 𝑗 = 1,…… , 𝑛, a Equação 𝐴. 7 torna-se igual a:
[𝑏31
𝑏32] = − [
1 cos (−2𝜋
𝑛)
0 sin (−2𝜋
𝑛)
]
−1
[cos (−
4𝜋
𝑛) … . cos (−
𝑛 − 1
𝑛2𝜋)
sin (−4𝜋
𝑛) … . sin (−
𝑛 − 1
𝑛2𝜋)
]
[ 𝑏33
𝑏34
::
𝑏3𝑛]
(𝐴. 10)
Portanto, adotando-se 𝑏33 = 1 e 𝑏34 = 𝑏35 = ⋯𝑏3𝑛 = 0, e efetuando a substituição
desses valores na Equação 𝐴. 10, é possível determinar os coeficientes 𝑏𝑖1 e 𝑏𝑖2, de modo a
obter o terceiro vetor que constitui o espaço nulo de 𝑀𝑑𝑞, representado por:
[𝐵3] = [𝑏31 𝑏32 1 0 … . 0] (𝐴. 11)
De forma análoga, pode-se determinar os demais vetores linearmente independentes do
espaço nulo de 𝑀𝑑𝑞.
Para demonstrar o processo de obtenção da matriz de transformação 𝑇𝑑𝑞, efetuou-se a
resolução numérica da Equação 𝐴. 1, considerando uma máquina de indução de 2 pólos e com
nove barras na gaiola do rotor, em que a matriz 𝑀 é definida pela Equação 𝐴. 13.
𝑇𝑑𝑞 =8
9[𝑀]
(𝐴. 12)
𝑀 =
[ 1 cos (−
2𝜋
9) cos (−
4𝜋
9) . . . cos (−
12𝜋
9) cos (−
14𝜋
𝑛) cos (−
16
9 𝜋)
0 sin (−2𝜋
9) sin (−
4𝜋
9) . . . sin (−
12𝜋
9) sin (−
14𝜋
𝑛) sin (−
16
9 𝜋)
𝑏31 𝑏32 𝑏33 . . . . . 𝑏3𝑛
𝑏41 𝑏42 . . . . . . 𝑏4𝑛
: : : : : : : : :: : : : . : : : :
𝑏91 𝑏92 . . . . . . 𝑏99
]
(𝐴. 13)
77
A matriz 𝐵 é calculada a partir da expressão seguinte:
[𝑏𝑖1
𝑏𝑖2] = − [
1 cos (−2𝜋
9)
0 sin (−2𝜋
9)
]
−1
[cos (−
4𝜋
9) … . cos (−
16
9𝜋)
sin (−4𝜋
9) … . sin (−
16
9𝜋)
]
[ 𝑏𝑖3
𝑏𝑖4
::
𝑏𝑖𝑛]
(𝐴. 14)
E os coeficientes relacionados à matriz 𝐵 são determinados em um processo similar ao
apresentado nas Equações 𝐴. 7 a 𝐴. 10. Efetuando-se as resoluções numéricas dos coeficientes
𝑏𝑖𝑗, e substituindo-os na Equação 𝐴. 13 tem-se:
𝑀 =
[
1,00 0,76 0,17 −0,50 −0,93 −0,93 −0,50 0,17 0,760,00 − 0,64 −0,98 −0.86 −0,34 0,34 0,86 0,98 0,64
1,00 −1,53 1,00 0,00 0,00 0,00 0,00 0,00 0,00 1,53 −1,34 0,00 1,00 0,00 0,00 0,00 0,00 0,00 1,34 −0,53 0,00 0,00 1,00 0,00 0,00 0,00 0,00 0,53 0,53 0,00 0,00 0,00 1,00 0,00 0,00 0,00− 0,53 1,34 0,00 0,00 0,00 0,00 1,00 0,00 0,00−1,34 1,53 0,00 0,00 0,00 0,00 0,00 1,00 0,00−1,53 1,00 0,00 0,00 0,00 0,00 0,00 0,00 1,00
]
(𝐴. 15)
A Equação 𝐴. 16 exibe a matriz 𝑇𝑑𝑞 para o exemplo dado.
𝑇𝑑𝑞 =
[
0,88 0,67 0,15 −0,44 −0.82 −0,82 −0,44 0,15 0,670,00 −0,56 −0,87 −0,76 −0.30 0.30 0,76 0.87 0,56
0,88 −1,36 0,88 0,00 0,00 0,00 0,00 0,00 0,00 1,36 −1,19 0,00 0,88 0,00 0,00 0,00 0,00 0,00
1,19 −0,47 0,00 0,00 0,88 0,00 0,00 0,00 0,00 0,47 0,47 0,00 0,00 0,00 0,88 0,00 0,00 0,00
−0,47 1,19 0,00 0,00 0,00 0,00 0,88 0,00 0,00−1,19 1,36 0,00 0,00 0,00 0,00 0,00 0,88 0,00−1,36 0,88 0,00 0,00 0,00 0,00 0,00 0,00 0,88
]
(𝐴. 16)







