Download - Relatório frenagem dinâmica_motor_cc
Universidade Federal de Uberlândia FEELT – Faculdade de Engenharia Elétrica
Acionamentos
Relatório:
Frenagem Dinâmica de Motor CC Derivação
Professor: Marcelo Lynce Ribeiro Chaves
Claudinei Alves Rocha 11011EEL060
Uberlândia, 4 de maio de 2011.
Frenagem Dinâmica de Motor de Corrente Contínua com Derivação
Universidade Federal de Uberlândia – Faculdade de Engenharia Elétrica – UFU/FEELT – Claudinei Alves Rocha – 11011EEL060
2
1. Introdução
Toda e qualquer máquina rotativa, ao longo de sua operação passa por processos de
aceleração e desaceleração em conseqüência do seu meio ou tipo de operação, porém durante
algum momento, esse processo irá demandar algum tipo de frenagem, que pode ser tanto sob
a presença ou não de energia elétrica. Os processos de frenagem têm na maioria das vezes o
intuito de reduzir o tempo necessário para a paralisação da máquina, uma vez que dependendo
de algumas circunstâncias, esse processo pode ocorrer com ou sem a presença de energia
elétrica, esta por sua vez permite um controle sobre a ação.
Quando a frenagem ocorre na presença de energia elétrica fornecida regularmente,
essa ação se dá de forma otimizada através de circuitos eletrônicos elaboradores de forma a
ter os menores danos possíveis ao sistema, pois ocorre de forma devidamente controlada e
monitorada. Nesse processo a energia cinética presente nos equipamentos é convertida em
energia elétrica e é devolvida à rede.
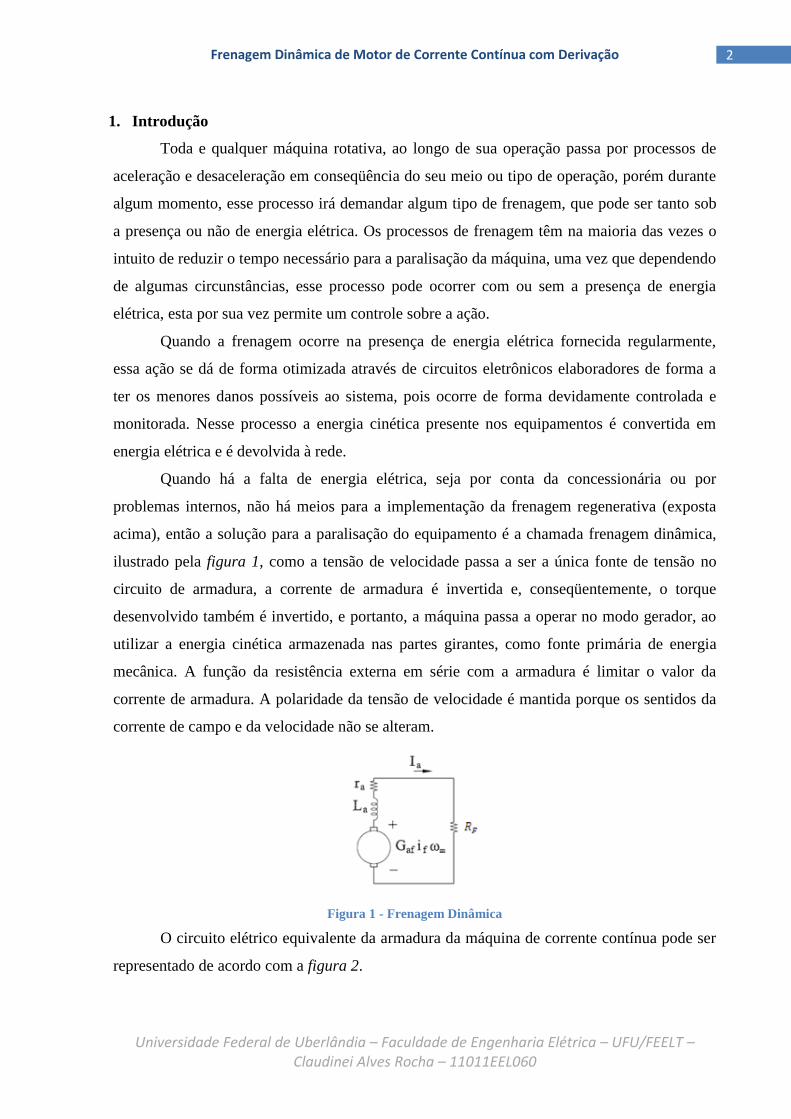
Quando há a falta de energia elétrica, seja por conta da concessionária ou por
problemas internos, não há meios para a implementação da frenagem regenerativa (exposta
acima), então a solução para a paralisação do equipamento é a chamada frenagem dinâmica,
ilustrado pela figura 1, como a tensão de velocidade passa a ser a única fonte de tensão no
circuito de armadura, a corrente de armadura é invertida e, conseqüentemente, o torque
desenvolvido também é invertido, e portanto, a máquina passa a operar no modo gerador, ao
utilizar a energia cinética armazenada nas partes girantes, como fonte primária de energia
mecânica. A função da resistência externa em série com a armadura é limitar o valor da
corrente de armadura. A polaridade da tensão de velocidade é mantida porque os sentidos da
corrente de campo e da velocidade não se alteram.
Figura 1 - Frenagem Dinâmica
O circuito elétrico equivalente da armadura da máquina de corrente contínua pode ser
representado de acordo com a figura 2.

Frenagem Dinâmica de Motor de Corrente Contínua com Derivação
Universidade Federal de Uberlândia – Faculdade de Engenharia Elétrica – UFU/FEELT – Claudinei Alves Rocha – 11011EEL060
3
Figura 2 - Circuito Elétrico Equivalente do Motor C.C. com derivação
Sabe-se que a força eletromotriz , em V, de uma máquina de corrente contínua está
diretamente relacionada com o fluxo do pólo indutor , em Wb, e com a velocidade de
rotação , em rad/s, e que o conjugado desenvolvido pelo motor , em N.m, é
diretamente proporcional a corrente , em A, e ao fluxo do indutor, temos:
A potência mecânica desenvolvida pelo motor é dada pelo produto entre conjugado e
velocidade:
Por outro lado, em análise a figura 2, sabe-se que:
Como a inércia mecânica é muito maior do que a inércia elétrica, a equação acima
pode ser simplificada como sendo:
Considerando que as perdas joulicas sejam iguais as perdas mecânicas, estima-se q a
resistência interna do motor seja dada por:
E sendo o rendimento dado por , temos:
Para o cálculo da resistência ( ) de partida, ou seja, do valor de resistência que limita
a corrente, de forma a acionar o motor de forma mais suave do que um acionamento com
partida direta, como a velocidade no momento de partida ainda é zero, pode-se calcular como
sendo:
Após a retirada da resistência de partida, o valor de corrente passa a ser , e de
conhecimento que o valor de resistência está inversamente proporcional ao valor da corrente,
ou seja, quanto maior a resistência, menor é a corrente para se desenvolver mesma tensão ou
potência, sendo assim:

Frenagem Dinâmica de Motor de Corrente Contínua com Derivação
Universidade Federal de Uberlândia – Faculdade de Engenharia Elétrica – UFU/FEELT – Claudinei Alves Rocha – 11011EEL060
4
Onde é o valor de corrente que se tem depois de desconectado o estágio de cada
restistência, é o número de estágios de resistência e é determinado por:
Sabendo que: , ou seja, onde
, então:
E sabendo ainda que:
De posse que e , e manipulando as equações acima temos:
Considerando constante durante a partida e determinando o intervalo de tempo Δt
para que seja retirado o reostato de partida, ou seja, variando de para , o tempo de
partida será dado por:
Em condições de frenagem, de maneira análoga, temos as seguintes equações:
2. Diagrama de Ligação
a) Circuito de Controle
O circuito de Controle tem a função de controlar a ordem da operação a ser realizada, no caso
a frenagem dinâmica do motor cc com derivação. E é apresentado na figura 3. Cabe salientar,
que o comando da operação de frenagem, foi executado manualmente, o que nota-se pela não

Frenagem Dinâmica de Motor de Corrente Contínua com Derivação
Universidade Federal de Uberlândia – Faculdade de Engenharia Elétrica – UFU/FEELT – Claudinei Alves Rocha – 11011EEL060
5
utilização de um temporizador por exemplo, ou seja, a ordem dos comandos foram
executados manualmente.
Figura 3 - Circuito de Controle
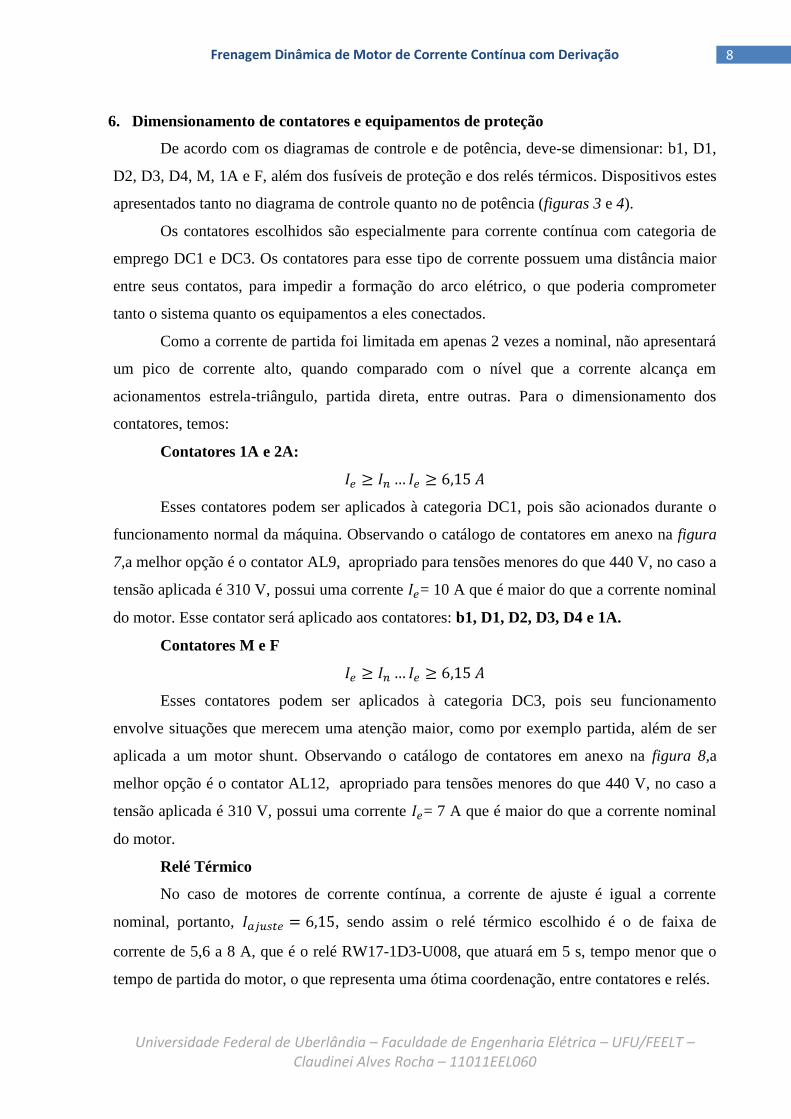
b) Circuito de Potência
A montagem do circuito de Potência foi realizada de acordo com a figura 4.
Figura 4 - Circuito de Potência
De acordo com o circuito de potência, nota-se que o motor considerado é um motor cc
de derivação.
Frenagem Dinâmica de Motor de Corrente Contínua com Derivação
Universidade Federal de Uberlândia – Faculdade de Engenharia Elétrica – UFU/FEELT – Claudinei Alves Rocha – 11011EEL060
6
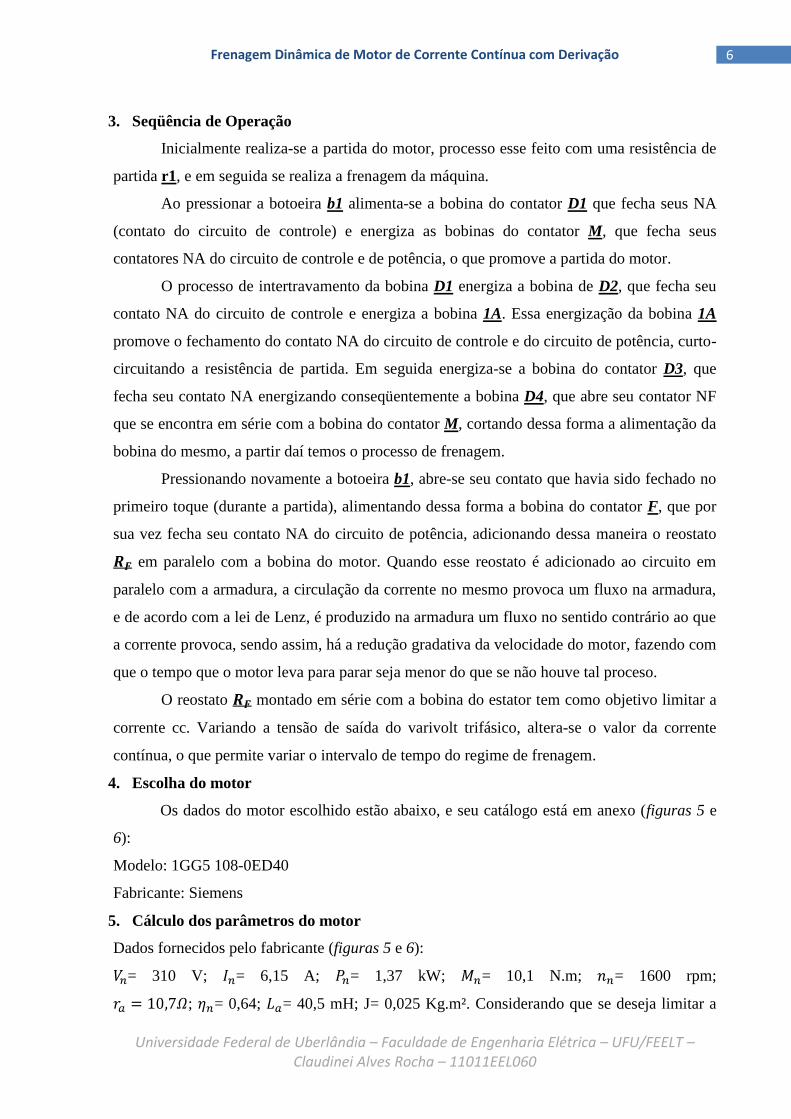
3. Seqüência de Operação
Inicialmente realiza-se a partida do motor, processo esse feito com uma resistência de
partida r1, e em seguida se realiza a frenagem da máquina.
Ao pressionar a botoeira b1 alimenta-se a bobina do contator D1 que fecha seus NA
(contato do circuito de controle) e energiza as bobinas do contator M, que fecha seus
contatores NA do circuito de controle e de potência, o que promove a partida do motor.
O processo de intertravamento da bobina D1 energiza a bobina de D2, que fecha seu
contato NA do circuito de controle e energiza a bobina 1A. Essa energização da bobina 1A
promove o fechamento do contato NA do circuito de controle e do circuito de potência, curto-
circuitando a resistência de partida. Em seguida energiza-se a bobina do contator D3, que
fecha seu contato NA energizando conseqüentemente a bobina D4, que abre seu contator NF
que se encontra em série com a bobina do contator M, cortando dessa forma a alimentação da
bobina do mesmo, a partir daí temos o processo de frenagem.
Pressionando novamente a botoeira b1, abre-se seu contato que havia sido fechado no
primeiro toque (durante a partida), alimentando dessa forma a bobina do contator F, que por
sua vez fecha seu contato NA do circuito de potência, adicionando dessa maneira o reostato
em paralelo com a bobina do motor. Quando esse reostato é adicionado ao circuito em
paralelo com a armadura, a circulação da corrente no mesmo provoca um fluxo na armadura,
e de acordo com a lei de Lenz, é produzido na armadura um fluxo no sentido contrário ao que
a corrente provoca, sendo assim, há a redução gradativa da velocidade do motor, fazendo com
que o tempo que o motor leva para parar seja menor do que se não houve tal proceso.
O reostato montado em série com a bobina do estator tem como objetivo limitar a
corrente cc. Variando a tensão de saída do varivolt trifásico, altera-se o valor da corrente
contínua, o que permite variar o intervalo de tempo do regime de frenagem.
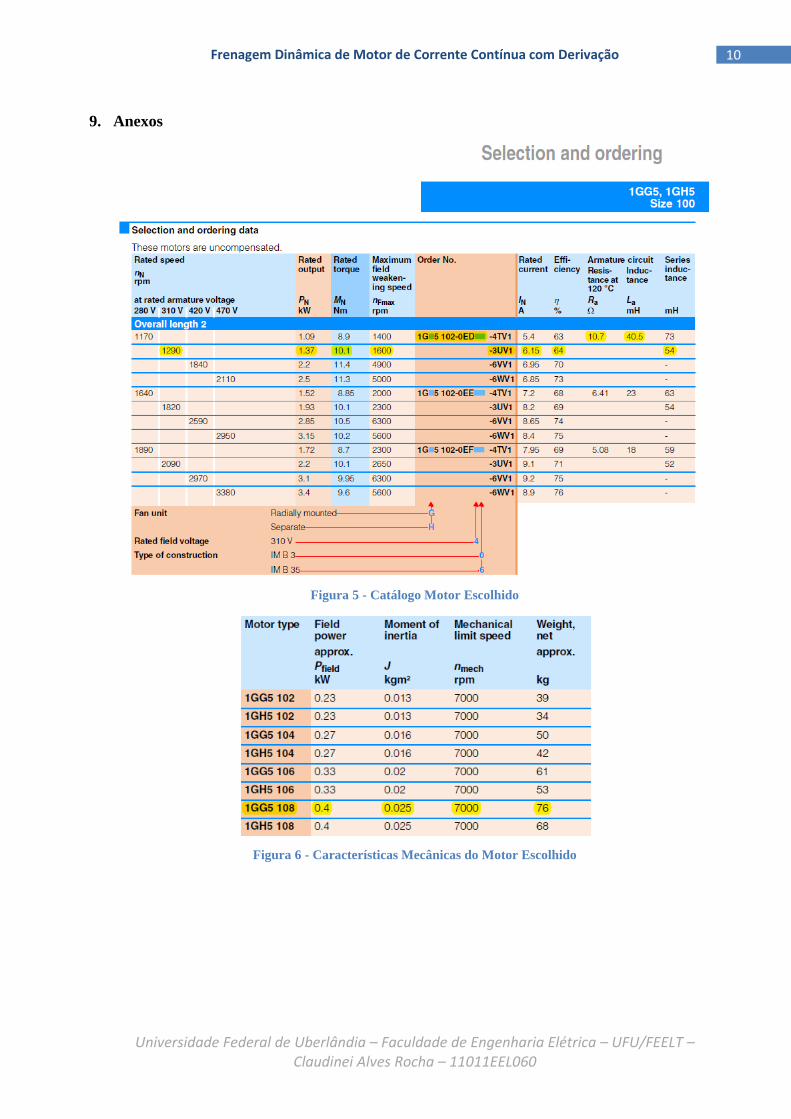
4. Escolha do motor
Os dados do motor escolhido estão abaixo, e seu catálogo está em anexo (figuras 5 e
6):
Modelo: 1GG5 108-0ED40
Fabricante: Siemens
5. Cálculo dos parâmetros do motor
Dados fornecidos pelo fabricante (figuras 5 e 6):
= 310 V; = 6,15 A; = 1,37 kW; = 10,1 N.m; = 1600 rpm;
; = 0,64; = 40,5 mH; J= 0,025 Kg.m². Considerando que se deseja limitar a

Frenagem Dinâmica de Motor de Corrente Contínua com Derivação
Universidade Federal de Uberlândia – Faculdade de Engenharia Elétrica – UFU/FEELT – Claudinei Alves Rocha – 11011EEL060
7
corrente de partida em 2,0 pu , devido às características dos
motores de corrente contínua. E considerando ainda que o motor esteja operando com carga
de 50% da nominal. Sabendo que , onde é a corrente de acordo com a carga aplicada
ao motor, daí considera-se inicialmente que , uma vez que
Baseado nos valores fornecidos pode-se calcular:
Logo para o controle da corrente de partida, será necessário apenas um estágio de
resistência com o valor de . Sendo , ou seja, resistência de
armadura mais resistência externa para controle de corrente, que tem o valor de .
O tempo para curto-circuitar a resistência de partida é de:
De posse que , para o processo de frenagem, de acordo com as equações
especificadas na introdução teórica acima temos corrente, conjugado e tempo de frenagem
respectivamente:
Frenagem Dinâmica de Motor de Corrente Contínua com Derivação
Universidade Federal de Uberlândia – Faculdade de Engenharia Elétrica – UFU/FEELT – Claudinei Alves Rocha – 11011EEL060
8
6. Dimensionamento de contatores e equipamentos de proteção
De acordo com os diagramas de controle e de potência, deve-se dimensionar: b1, D1,
D2, D3, D4, M, 1A e F, além dos fusíveis de proteção e dos relés térmicos. Dispositivos estes
apresentados tanto no diagrama de controle quanto no de potência (figuras 3 e 4).
Os contatores escolhidos são especialmente para corrente contínua com categoria de
emprego DC1 e DC3. Os contatores para esse tipo de corrente possuem uma distância maior
entre seus contatos, para impedir a formação do arco elétrico, o que poderia comprometer
tanto o sistema quanto os equipamentos a eles conectados.
Como a corrente de partida foi limitada em apenas 2 vezes a nominal, não apresentará
um pico de corrente alto, quando comparado com o nível que a corrente alcança em
acionamentos estrela-triângulo, partida direta, entre outras. Para o dimensionamento dos
contatores, temos:
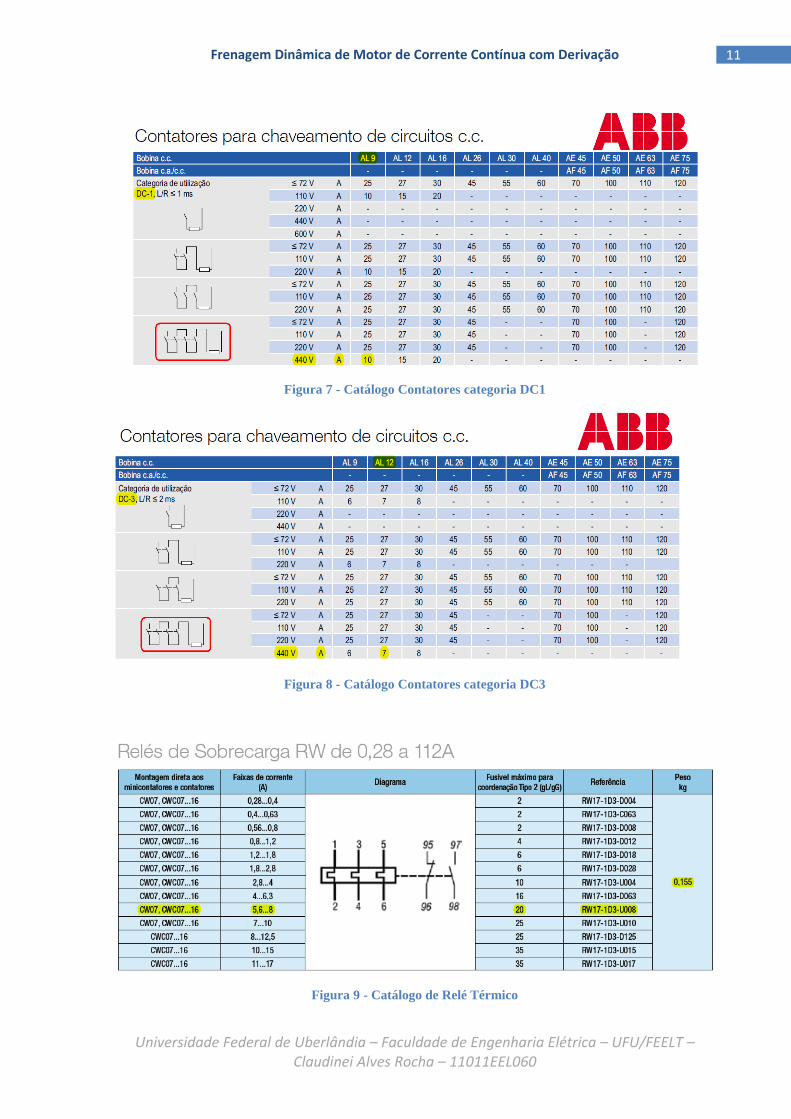
Contatores 1A e 2A:
Esses contatores podem ser aplicados à categoria DC1, pois são acionados durante o
funcionamento normal da máquina. Observando o catálogo de contatores em anexo na figura
7,a melhor opção é o contator AL9, apropriado para tensões menores do que 440 V, no caso a
tensão aplicada é 310 V, possui uma corrente = 10 A que é maior do que a corrente nominal
do motor. Esse contator será aplicado aos contatores: b1, D1, D2, D3, D4 e 1A.
Contatores M e F
Esses contatores podem ser aplicados à categoria DC3, pois seu funcionamento
envolve situações que merecem uma atenção maior, como por exemplo partida, além de ser
aplicada a um motor shunt. Observando o catálogo de contatores em anexo na figura 8,a
melhor opção é o contator AL12, apropriado para tensões menores do que 440 V, no caso a
tensão aplicada é 310 V, possui uma corrente = 7 A que é maior do que a corrente nominal
do motor.
Relé Térmico
No caso de motores de corrente contínua, a corrente de ajuste é igual a corrente
nominal, portanto, , sendo assim o relé térmico escolhido é o de faixa de
corrente de 5,6 a 8 A, que é o relé RW17-1D3-U008, que atuará em 5 s, tempo menor que o
tempo de partida do motor, o que representa uma ótima coordenação, entre contatores e relés.
Frenagem Dinâmica de Motor de Corrente Contínua com Derivação
Universidade Federal de Uberlândia – Faculdade de Engenharia Elétrica – UFU/FEELT – Claudinei Alves Rocha – 11011EEL060
9
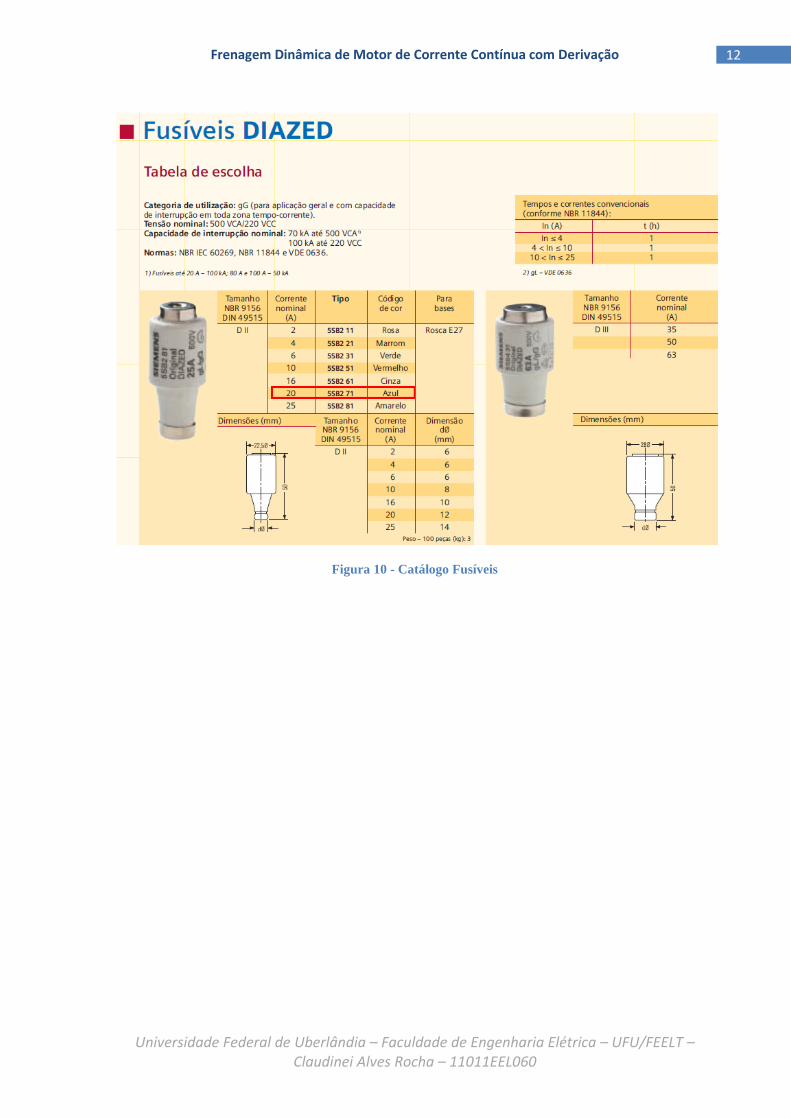
Fusíveis
Enquanto que o fusível selecionado foi escolhido baseando nas características do relé
térmico escolhido, que solicita para a coordenação ideal entre tais dispositivos, um fusível de
corrente máxima igual a 20 A, como observado nas figuras 9 e 10.
Dessa forma, têm-se a coordenação entre fusíveis, relés térmicos e contatores, de
forma que todo o processo de acionamento e frenagem seja realizado com sucesso. O fusível
escolhido é o 5SB2 71, que possui suas características descritas na figura 10 do anexo.
7. Conclusão
A utilização de motores de corrente contínua não é tão acentuada quanto a de motores
de corrente alternada, porém não menos importante. E requer, similar aos motores C.A.,
formas de controle de maneira a se ter a eficiência deseja para tal equipamento.
O dimensionamento tanto do acionamento quanto da proteção de máquinas, sejam elas
C.C. ou C.A., deve ser feito de forma consciente e baseado em valores fornecidos pelo
fabricando da máquina que se deseja proteger, de forma a manter a integridade tanto do
sistema quanto do equipamento.
8. Referências Bibliográficas
http://www.automation.siemens.com/mcms/infocenter/dokumentencenter/ld/Documentsu20C
atalogs/dc-motor/da12-2008-en.pdf
http://www.weg.net/files/products/WEG-contatores-e-reles-de-sobrecarga-catalogo-completo-
50026112-catalogo-portugues-br.pdf
http://www.itapeva.unesp.br/docentes/manoel/fusiveis%5B1%5D.pdf
http://www.valog.com.br/site/pdf/abbmanobra-catalogogeral2006.pdf
BIM, E. Máquinas Elétricas e Acionamento. Unicamp
FITZGERALD, A. E. Máquinas Elétricas com introdução à eletrônica de potência.
Frenagem Dinâmica de Motor de Corrente Contínua com Derivação
Universidade Federal de Uberlândia – Faculdade de Engenharia Elétrica – UFU/FEELT – Claudinei Alves Rocha – 11011EEL060
10
9. Anexos
Figura 5 - Catálogo Motor Escolhido
Figura 6 - Características Mecânicas do Motor Escolhido
Frenagem Dinâmica de Motor de Corrente Contínua com Derivação
Universidade Federal de Uberlândia – Faculdade de Engenharia Elétrica – UFU/FEELT – Claudinei Alves Rocha – 11011EEL060
11
Figura 7 - Catálogo Contatores categoria DC1
Figura 8 - Catálogo Contatores categoria DC3
Figura 9 - Catálogo de Relé Térmico
Frenagem Dinâmica de Motor de Corrente Contínua com Derivação
Universidade Federal de Uberlândia – Faculdade de Engenharia Elétrica – UFU/FEELT – Claudinei Alves Rocha – 11011EEL060
12
Figura 10 - Catálogo Fusíveis







