Download - Interface cérebro
Interface cérebro-computadorOrigem: Wikipédia, a enciclopédia livre
Neuropsicologia
Tópicos[show]
Funções cerebrais [mostrar]
Pessoas[mostrar]
Testes [show]
Mente e cérebro portal
V
T
E
A interface cérebro-computador ( BCI ), muitas vezes chamado de interface cérebro-
máquina ( MMI ), ou às vezes chamado de uma interface neural direta ou uma interface cérebro-
máquina ( BMI ), é uma via de comunicação direta entre o cérebro e um dispositivo externo. BCIs
são dirigidos a ajudar, aumentando ou reparar funções cognitivas e sensório-motor humanos.
Pesquisa sobre BCIs começou na década de 1970 na Universidade da Califórnia Los
Angeles (UCLA), sob uma concessão do National Science Foundation , seguido por um contrato
com a DARPA . [ 1 ] [ 2 ] Os artigos publicados após esta pesquisa também marca a primeira aparição
da expressão interface cérebro-computador na literatura científica.
O campo da BCI pesquisa e desenvolvimento, desde então, focado principalmente em aplicações de
neuro-próteses que visam restaurar a audição danificada, visão e movimento. Graças à
notável plasticidade cortical do cérebro, os sinais de próteses implantadas pode, após a adaptação,
ser tratado pelo cérebro como sensor de canais naturais ou efetoras. [ 3 ] Após anos de
experimentação animal, os primeiros dispositivos neuroprosthetic implantados em seres humanos
apareceram na meados de 1990.
Conteúdo
[ esconder ]
Uma História
2 BCI contra neuroprosthetics
3 Animais pesquisa BCI
o 3.1 Os primeiros trabalhos
o 3.2 sucessos de pesquisa de destaque
3.2.1 Kennedy e Yang Dan
3.2.2 Nicolelis
3.2.3 Donoghue, Schwartz e Andersen
3.2.4 Outra pesquisa
3.2.5 O Prémio BCI
4 investigação BCI Humanos
o 4.1 BCIs invasoras
4.1.1 Visão
4.1.2 Movimento
o 4.2 BCIs parcialmente invasivos
o 4.3 BCIs não invasivos
4.3.1 EEG
4.3.1.1 Visão geral
4.3.1.2 matrizes de eletrodos ativos secos
4.3.1.3 Outra pesquisa
4.3.2 MEG e ressonância magnética
4.3.3 Neurogaming
o 4.4 telepatia sintética / comunicação silenciosa
o 4.5 Comercialização
5 BCIs de cultura celular
6 Considerações éticas
7 de baixo custo Interfaces baseadas em BCI
8 Ficção ou especulação
9 Veja também
10 Referências
11 Leitura
12 Ligações externas
História [ editar ]
A história de interfaces cérebro-computador (BCI) começa com Hans Berger é a descoberta da
atividade elétrica do cérebro humano eo desenvolvimento de eletroencefalografia (EEG). Em 1924,
Berger foi o primeiro a registrar a atividade do cérebro humano por meio de EEG. Ao analisar os
vestígios de EEG, Berger foi capaz de identificar actividade oscilatório no cérebro, tais como aonda
alfa (8-12 Hz), também conhecido como onda de Berger.
Dispositivo de Berger primeira gravação era muito rudimentar. Ele inseriu prata fios sob os escalpos
de seus pacientes. Estes foram mais tarde substituídos por folhas de prata ligados à cabeça do
paciente por ligaduras de borracha. Berger estes sensores ligados a um electrómetro capilar
Lippmann , com resultados decepcionantes. Aparelhos de medição mais sofisticados, como
aSiemens -coil double gravação galvanômetro , que exibiu tensões elétricas tão pequeno quanto um
décimo de milésimo de um volt, levou ao sucesso.
Berger analisou a inter-relação de alternâncias em seus diagramas de EEG onda com doenças
cerebrais . EEGs permitido possibilidades completamente novas para a investigação de atividades
do cérebro humano.
BCI contra neuro-próteses [ de edição ]
Ver artigo principal: Neuroprosthetics
Neuroprosthetics é uma área de neurociência preocupado com próteses neurais. Isto é, o uso de
dispositivos artificiais para substituir a função do sistema nervoso relacionadas com problemas
auditivos e cérebro, ou dos órgãos sensoriais. O dispositivo neuroprosthetic mais utilizado é
o implante coclear , que, em dezembro de 2010, havia sido implantado em cerca de 220 mil pessoas
em todo o mundo. [ 4 ] Há também vários dispositivos neuroprosthetic que visam restaurar a visão,
incluindo implantes de retina .
A diferença entre BCIs e neuro-próteses é em grande parte na forma como os termos são utilizados:
neuroprosthetics tipicamente ligar o sistema nervoso a um dispositivo, ao passo que BCIs
geralmente ligar o cérebro (ou do sistema nervoso), com um sistema de
computador. Neuroprosthetics prático, pode ser ligada a qualquer parte do sistema nervoso, por
exemplo, nervos periféricos, enquanto que o termo "BCI" designa geralmente uma classe mais
estreita do que os sistemas de interface com o sistema nervoso central.
Os termos são, por vezes, no entanto, usados alternadamente. Neuroprosthetics e BCIs procurar
atingir os mesmos objectivos, como restaurar a visão, a audição, o movimento, a capacidade de se
comunicar, e até mesmo a função cognitiva . Ambas utilizam métodos experimentais semelhantes e
técnicas cirúrgicas.
BCI Animais pesquisa [ edição ]
Vários laboratórios conseguiram gravar sinais de macaco e rato córtex cerebral para operar BCIs
para produzir o movimento. Macacos navegou cursores de computador na tela e mandou braços
robóticos para executar tarefas simples, simplesmente pensar sobre a tarefa e ver o feedback visual,
mas sem qualquer saída do motor. [ 5 ] Em maio de 2008 fotografias que mostravam um macaco
na Universidade de Pittsburgh Medical Centro de operar um braço robótico pelo pensamento foram
publicados em uma série de revistas científicas conhecidas e revistas. [ 6 ] Outra pesquisa sobre
gatos decodificou os sinais visuais neurais.
Os primeiros trabalhos [ edição ]
Macaco operar um braço robótico com interface cérebro-computador (Schwartz laboratório da Universidade de
Pittsburgh)
Em 1969, o condicionamento operante estudos de Fetz e colegas, do Centro de Investigação
Regional e Departamento de Fisiologia e Biofísica daUniversidade de Washington School of
Medicine , em Seattle , mostrou pela primeira vez que os macacos podem aprender a controlar a
deflexão de um biofeedback metros braço com a atividade neural. [ 7 ] Um trabalho semelhante na
década de 1970 estabeleceu que os macacos podem aprender rapidamente a controlar
voluntariamente as taxas de disparo de neurônios individuais e múltiplas nas primárias do córtex
motor , se eles foram recompensados para a geração de padrões adequados de atividade neural. [ 8 ]
Os estudos que se desenvolveram algoritmos para reconstruir os movimentos de córtex
motor neurônios , que controlam o movimento, remontam à década de 1970. Na década de 1980,
Apostolos Georgopoulos na Johns Hopkins University descobriram uma relação matemática entre as
respostas elétricas de um só motor neurônios do córtex em macacos rhesus e da direção em que se
moviam os braços (com base em um cosseno função). Ele também descobriu que grupos dispersos
de neurônios, em diferentes áreas do cérebro do macaco, controlada coletivamente comandos
motores. Mas ele foi capaz de gravar os disparos de neurônios em uma única área de cada vez, por
causa das limitações técnicas impostas pelo seu equipamento.[ 9 ]
Houve um rápido desenvolvimento em BCIs desde meados da década de 1990. [ 10 ] Vários grupos
foram capazes de captar os sinais cerebrais complexas córtex motor de gravação de conjuntos
neurais (grupos de neurônios) e usá-los para controlar dispositivos externos. Grupos de investigação
notáveis foram liderados por Richard Andersen, John Donoghue , Phillip Kennedy, Miguel Nicolelis e
Andrew Schwartz. [ carece de fontes? ]
Sucessos de pesquisa proeminentes [ edição ]
Kennedy e Yang Dan [ edição ]
Phillip Kennedy (que mais tarde fundou Neural Signals , em 1987) e seus colegas construíram a
primeira interface cérebro-computador intracorticais implantando neurotrófico-cone eletrodos em
macacos. [ carece de fontes? ]
Yang Dan e as gravações dos colegas de visão gato usando um BCI implantado nonúcleo geniculado
lateral (linha superior: Imagem original; linha de fundo: a gravação)
Em 1999, pesquisadores liderados por Yang Dan na University of California, Berkeley decodificado
disparos neuronais para reproduzir imagens vistas por gatos. A equipe usou uma série de eletrodos
embutidos no tálamo (que integra todos os estímulos sensoriais do cérebro) de gatos olhos
aguçados. Pesquisadores alvo 177 células cerebrais no tálamo do núcleo lateral geniculado área,
que decodifica os sinais da retina . Os gatos foram mostrados oito filmes curtos, e os seus disparos
de neurônios foram registrados. O uso de filtros matemáticos, os pesquisadores decodificados os
sinais para gerar os filmes do que os gatos viram e foram capazes de reconstruir cenas
reconhecíveis e objetos em movimento. [ 11 ] resultados semelhantes em humanos já foram
alcançados por pesquisadores no Japão ( veja abaixo ).
Nicolelis [ edição ]
Miguel Nicolelis , professor da Duke University , em Durham, Carolina do Norte , tem sido um
defensor proeminente de usar vários eletrodos distribuídos por uma área maior do cérebro para
obter os sinais neuronais para dirigir um BCI. Tais conjuntos neurais são ditas para reduzir a
variabilidade na saída produzida por eletrodos individuais, o que poderia torná-lo difícil de operar um
BCI.
Após a realização de estudos iniciais em ratos durante a década de 1990, Nicolelis e seus colegas
desenvolveram BCIs que a atividade cerebral decodificado em macacos-coruja e utilizados os
dispositivos para reproduzir os movimentos de macaco nos braços robóticos. Macacos têm
avançado alcançar e habilidades e boas habilidades de manipulação de mão agarrar, tornando-os
sujeitos de teste ideais para este tipo de trabalho.
Em 2000, o grupo conseguiu construir uma BCI que reproduziu coruja movimentos macaco
enquanto o macaco operado um joystick ou atingido por comida. [ 12 ] O BCI operado em tempo real e
também pode controlar um robô remotamente separado sobre protocolo Internet . Mas os macacos
não podia ver o braço movendo-se e não recebeu qualquer feedback, o chamado open-loopBCI.
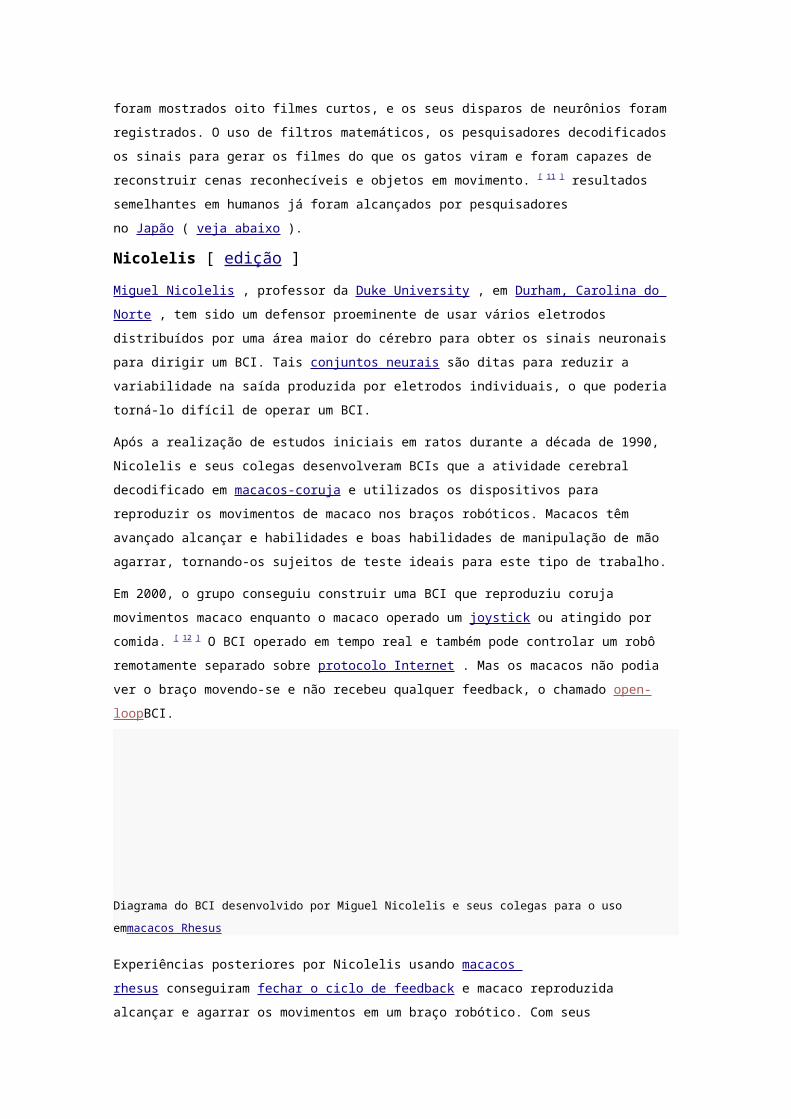
Diagrama do BCI desenvolvido por Miguel Nicolelis e seus colegas para o uso emmacacos Rhesus
Experiências posteriores por Nicolelis usando macacos rhesus conseguiram fechar o ciclo de
feedback e macaco reproduzida alcançar e agarrar os movimentos em um braço robótico. Com seus
profundamente fissura e franziu cérebros, macacos rhesus são considerados modelos melhores
para o homem neurofisiologia do que macacos-coruja. Os macacos foram treinados para alcançar e
agarrar objetos na tela do computador através da manipulação de um joystick enquanto os
movimentos correspondentes por um braço robótico estavam escondidos. [ 13 ] [ 14 ] Os macacos foram
mostrados mais tarde o robô diretamente e aprendeu a controlá-lo, visualizando seus
movimentos . O BCI usado previsões de velocidade para controlar os movimentos chegando e,
simultaneamente, previu vigor handgripping .
Donoghue, Schwartz e Andersen [ edição ]
Outros laboratórios que desenvolveram BCIs e algoritmos que decodificam sinais do neurônio
incluem as dirigidas por John Donoghue na Universidade Brown , Andrew Schwartz na Universidade
de Pittsburgh e Richard Andersen no Caltech . Estes pesquisadores foram capazes de produzir BCIs
de trabalho, mesmo usando sinais gravados a partir de muito menos neurônios do que os Nicolelis
(15-30 neurônios contra 50-200 neurônios).
O grupo de Donoghue informou treinamento macacos rhesus para usar um BCI para rastrear alvos
visuais na tela do computador (closed-loop BCI), com ou sem a ajuda de um joystick. [ 15 ] O grupo de
Schwartz criou uma BCI para rastreamento tridimensional em realidade virtual e também controlo
BCI reproduzido em um braço robótico.[ 16 ] O mesmo grupo criado manchete quando eles
demonstraram que um macaco pode alimentar-se pedaços de fruta e os marshmallows usando um
braço robotizado controlado por sinais cerebrais próprias do animal. [ 17 ] [ 18 ] [ 19 ]
O grupo de Andersen usado gravações de atividade premovement do córtex parietal posterior em
sua BCI, incluindo sinais criados quando os animais experimentais antecipado receber uma
recompensa. [ 20 ]
Outra pesquisa [ edição ]
Além de prever cinemática e cinética parâmetros de movimentos dos membros, BCIs que
predizem eletromiográficas ou atividade elétrica dos músculos de primatas estão sendo
desenvolvidos.[ 21 ] Tais BCIs poderia ser usado para restaurar a mobilidade de membros paralisados
por estimular eletricamente os músculos.
Miguel Nicolelis e seus colegas demonstraram que a atividade de grandes conjuntos neurais pode
prever posição do braço. Este trabalho possibilitou a criação de BCIs que lêem intenções de
movimento do braço e traduzi-los em movimentos de atuadores artificiais. Carmena e
colegas [ 13 ] programado a codificação neural em uma BCI que permitiu que um macaco para
controlar alcançar e agarrar os movimentos de um braço robótico. Lebedev e colegas [ 14 ] se que as
redes cerebrais reorganizar para criar uma nova representação do apêndice robótico para além da
representação dos membros próprio do animal.
O maior impedimento para o BCI tecnologia actualmente é a falta de uma modalidade sensor que
fornece um acesso seguro, preciso e robusto a sinais do cérebro. É concebível, ou mesmo provável,
contudo, que um tal sensor será desenvolvido dentro dos próximos 20 anos. O uso de um tal sensor
deve expandir o leque de funções de comunicação que podem ser fornecidos utilizando um BCI.
Desenvolvimento e implementação de um sistema BCI é complexo e demorado. Em resposta a este
problema, Dr. Gerwin Schalk tem vindo a desenvolver um sistema de propósito geral para pesquisa
BCI, chamado BCI2000 . BCI2000 tem estado em desenvolvimento desde 2000 em um projeto
liderado pela Interface de Programa de P & D Brain-Computer no Centro de Wadsworth daIorque
Departamento de Saúde do Estado Novo , em Albany, Nova York , EUA .
Uma nova abordagem 'sem fio' usa canais iônicos light-gate como channelrodopsina para controlar
a atividade de subconjuntos geneticamente definidos de neurônios in vivo . No contexto de uma
tarefa de aprendizagem simples, iluminação de transf células do córtex somatossensorial
influenciado o processo de tomada de decisão que se deslocam livremente ratinhos . [ 22 ]
O Prémio BCI [ edição ]
O Prêmio Anual BCI , dotada de 3.000 dólares, é concedido em reconhecimento de investigação
notável e inovadora na área de interfaces cérebro-computador. Cada ano, um laboratório de
pesquisa de renome é convidado a avaliar os projectos apresentados e atribuir o prémio. O júri é
composto por especialistas líderes mundiais BCI recrutados pelo laboratório de premiação.Seguinte
lista é composta dos vencedores do Prêmio BCI:
2010: Cuntai Guan, Kai Keng Ang, Karen Sui Geok Chua e Beng Ti Ang, ( A *
STAR , Singapura )
Baseado em imagética motora Interface Cérebro-Computador reabilitação robótica
para acidente vascular cerebral.
2011: Moritz Grosse-Wentrup e Bernhard Schölkopf ( Instituto Max Planck para Sistemas
Inteligentes , Alemanha )
Quais são as causas neuro-fisiológicas das variações de desempenho na interface
cérebro-computador?
2012: Surjo R. Soekadar e Niels Birbaumer, (Applied Neurotechnology Lab, do
Hospital Universitário de Tübingen e do Instituto de Psicologia Médica e Neurobiologia
Comportamental,Universidade Eberhard Karls , Tübingen, Alemanha)
Melhorar a Eficácia da Ipsilesional Brain-Computer Interface de Treinamento em
Neurorehabilitation de AVC crônico.
2013: MC Dadarlat a, b , JE O'Doherty um , PN Sabes a, b ( um Departamento de
Fisiologia do Centro de Integrative Neuroscience, San Francisco, CA, EUA, b UC
Berkeley-UCSF Programa de Pós-Graduação de Bioengenharia, Universidade da
Califórnia , San Francisco, CA, EUA),
A abordagem baseada na aprendizagem ao feedback sensorial artificial: Substitui
microestimulação intracorticais e aumenta a visão.
Human BCI pesquisa [ edição ]
BCIs invasivos [ edição ]
Visão [ edição ]
Jens Naumann, um homem com cegueira adquirida, sendo entrevistado sobre sua
visão BCI na CBS é The Early Show
Pesquisa BCI invasiva tem como alvo a reparação vista danificados e
proporcionando uma nova funcionalidade para pessoas com paralisia. BCIs
invasivos são implantados diretamente na massa cinzenta do cérebro durante a
neurocirurgia. Porque eles encontram-se na massa cinzenta, dispositivos
invasivos produzir os sinais da mais alta qualidade de dispositivos BCI mas são
propensas a cicatriz do tecido build-up, fazendo com que o sinal se torne mais
fraco, ou mesmo inexistente, como o corpo reage a um objeto estranho no
cérebro.
Em ciência da visão , diretos implantes cerebrais foram usados para tratar a
não- congênita cegueira (adquirida). Um dos primeiros cientistas a produzir uma
interface cérebro trabalhando para restaurar a visão era investigador
privado William Dobelle .
Primeiro protótipo do Dobelle foi implantado em "Jerry", um homem cego na idade
adulta, em 1978. A única série BCI contendo 68 eletrodos foi implantada em
Jerry córtex visual e conseguiu produzir fosfenos , a sensação de ver a luz. O
sistema inclui câmeras montadas em óculos para enviar sinais para o
implante. Inicialmente, o implante permitiu Jerry ver tons de cinza em um campo
de visão limitado a um frame-rate baixo. Isso também necessário que ele seja
ligado a um computador mainframe , mas encolhimento eletrônicos e
computadores mais rápidos fez o seu olho artificial mais portátil e agora capacitá-
lo a realizar tarefas simples sem ajuda. [ 23 ]
Unidade fictícia que ilustra a concepção de um BrainGate de interface
Em 2002, Jens Naumann, também cego na idade adulta, tornou-se o primeiro de
uma série de 16 pacientes que pagam para receber o implante de Dobelle
segunda geração, marcando um dos primeiros usos comerciais de BCIs. O
dispositivo de segunda geração utilizado um implante mais sofisticado permitindo
um melhor mapeamento dos fosfenos em visão coerente. Phosphenes estão
espalhados por todo o campo visual em que os pesquisadores chamam de "efeito
estrelado da noite". Imediatamente após seu implante, Jens foi capaz de usar sua
visão imperfeita restaurado paradirigir um automóvel lentamente ao redor da área
de estacionamento do instituto de pesquisa. [ 24 ]
Movimento [ edição ]
BCIs focando neuroprosthetics motoras visam quer restaurar o movimento em
indivíduos com paralisia ou fornecer dispositivos para ajudá-los, tais como
interfaces com computadores ou braços do robô.
Pesquisadores da Universidade de Emory , em Atlanta , liderado por Philip
Kennedy e Roy Bakay, foram os primeiros a instalar um implante de cérebro em
um ser humano que produziu sinais de alta qualidade o suficiente para simular o
movimento. Seu paciente, Johnny Ray (1944-2002), sofria de " locked-in
syndrome "depois de sofrer um tronco cerebral acidente vascular cerebral em
1997. Implante de Ray foi instalado em 1998 e viveu o tempo suficiente para
começar a trabalhar com o implante, acabou aprendendo a controlar um cursor de
computador, ele morreu em 2002 de umaneurisma cerebral . [ 25 ]
Tetraplégico Matt Nagle se tornou a primeira pessoa a controlar uma mão artificial
usando um BCI em 2005 como parte do primeiro teste em humanos de nove
meses de Cyberkinetics 's BrainGate chip implante. Implantada em direito de
Nagle giro pré-central (área do córtex motor para o movimento do braço), o
implante BrainGate 96 eletrodos permitiu Nagle para controlar um braço robótico
pensando em mover a mão, bem como um cursor de computador, luzes e
TV. [ 26 ] Um ano mais tarde, professor Jonathan Wolpaw [ quem? ] recebeu o prêmio
da Fundação Altran para a Inovação para desenvolver uma interface de
computador do cérebro com eletrodos localizados na superfície do crânio, em vez
de diretamente no cérebro.
Mais recentemente, equipas de investigação lideradas pelo grupo BrainGate
na Universidade Brown [ 27 ] e um grupo liderado pela University of Pittsburgh
Medical Center , [ 28 ] , tanto em colaboração com o Departamento de Assuntos de
Veteranos dos Estados Unidos , demonstraram ainda mais sucesso no controle
direto de próteses robóticas com muitos graus de liberdade usando ligações
directas para matrizes de neurônios no córtex motor de pacientes com tetraplegia.
BCIs parcialmente invasivos [ edição ]
Dispositivos BCI parcialmente invasivos são implantados no interior do crânio,
mas descanso fora do cérebro, em vez de dentro da massa cinzenta. Eles
produzem sinais melhor resolução que BCIs não invasivos em que o tecido do
osso do crânio desvia e deforma os sinais e têm um menor risco de formação de
tecido cicatricial no cérebro do que BCIs totalmente invasivos.
Electrocorticography (ECoG) mede a actividade eléctrica do cérebro feita por
baixo do crânio de um modo semelhante ao electroencefalografia não-invasiva
(ver abaixo), mas os eléctrodos são incorporados em uma almofada fina de
plástico que é colocada acima do córtex, abaixo da dura-máter mater . [ 29 ] ECoG
tecnologias foram testadas pela primeira vez em humanos em 2004 por Eric
Leuthardt e Daniel Moran da Universidade de Washington em St Louis . Em um
estudo posterior, os pesquisadores permitiu um adolescente para jogar Space
Invaders usando seu implante ECoG. [ 30 ] Esta pesquisa indica que o controle é
rápida, requer um mínimo de treinamento, e pode ser uma troca ideal com relação
ao sinal de fidelidade e nível de invasão .
(Nota: esses eletrodos não tinha sido implantado no paciente com a intenção de
desenvolver um BCI O paciente vinha sofrendo de grave. epilepsia e os eletrodos
foram implantados temporariamente para ajudar seus médicos localizar focos de
apreensão, os investigadores BCI simplesmente aproveitou esta .) [ carece de fontes? ]
Os sinais podem ser ou subdural ou epidural, mas não são tomadas a partir de
dentro do cérebro parênquima si. Ele não foi estudada extensivamente até
recentemente devido ao acesso limitado de indivíduos. Actualmente, a única
maneira para adquirir o sinal para o estudo é através da utilização de pacientes
que necessitam de monitorização invasiva para a localização e ressecção de um
foco epiléptico.
ECoG é muito promissor intermediário BCI modalidade, pois tem maior resolução
espacial, melhor relação sinal-ruído, faixa de freqüência mais ampla, e menos
exigências de formação de couro cabeludo gravados EEG, e ao mesmo tempo
tem dificuldade menor técnica, de risco clínico menor e, provavelmente, superior
estabilidade a longo prazo do que a gravação de um único neurônio medular. Este
perfil de funcionalidade e evidências recentes do alto nível de controle com os
requisitos mínimos de formação mostra potencial de aplicação no mundo real para
as pessoas com deficiência motora. [ 31 ] [ 32 ]
Luz reativas de imagem dispositivos BCI ainda estão no campo da teoria. Estes
envolveria a implantação de um laser de dentro do crânio. O laser poderia ser
treinado em um único neurónio e reflectância do neurónio medida por um sensor
separado. Quando os fogos de neurônios, o padrão de luz laser e comprimentos
de onda que reflete mudaria um pouco. Isso permitiria que os pesquisadores para
monitorar neurônios individuais, mas requerem menos contato com o tecido e
reduzir o risco de tecido cicatricial build-up. [ carece de fontes? ]
Não-invasivo BCIs [ edição ]
Bem como experiências invasivas, também houve experimentos em seres
humanos usando não-invasivos de neuroimagem tecnologias como interfaces. Os
sinais gravados deste modo foram usadas para implantes potência muscular e
restaurar o movimento parcial num voluntário experimental. Embora sejam fáceis
de usar, os implantes não-invasivos produzir baixa resolução do sinal, porque o
crânio amortece sinais, dispersão e esbater as ondas eletromagnéticas criadas
pelos neurônios. Embora as ondas pode ainda ser detectada, é mais difícil
determinar a área do cérebro que, ou ainda as acções de neurónios individuais
criado.
EEG [ edição ]
Visão [ edição ]
As gravações de ondas cerebrais produzidas por um eletroencefalograma
Eletroencefalografia (EEG) é o potencial de interface não-invasivo mais estudado,
principalmente devido à sua boa resolução temporal , facilidade de uso,
portabilidade e baixo custo de set-up. Mas, assim como a susceptibilidade da
tecnologia para o ruído , outra barreira substancial para o uso do EEG como uma
interface cérebro-computador é o extenso treinamento necessário para que os
usuários possam trabalhar a tecnologia. Por exemplo, nas experiências a partir de
meados da década de 1990, Niels Birbaumer na Universidade de
Tubingen na Alemanha pessoas treinadas paralisados de auto-regular
os potenciais corticais lento no seu EEG, de tal forma que estes sinais podem ser
usados como um sinal binário para controlar um cursor de
computador. [ 33 ] (Birbaumer já havia treinado epilépticos para impedir ataques
iminentes, controlando essa onda de baixa tensão.) O experimento viu dez
pacientes treinados para mover um cursor de computador, controlando suas
ondas cerebrais. O processo foi lento, exigindo mais de uma hora para os
pacientes para escrever 100 caracteres com o cursor, enquanto a formação
muitas vezes levou muitos meses.
Outro parâmetro de pesquisa é o tipo de actividade oscilatório que é
medido. Investigação posterior de Birbaumer com Jonathan Wolpaw
naUniversidade Estadual de Nova York tem-se centrado no desenvolvimento de
tecnologia que permita que os usuários escolham os sinais cerebrais que
encontraram mais fácil de operar uma BCI, incluindo mu e beta ritmos.
Outro parâmetro é o método de retorno utilizado e isto é demonstrado nos
estudos de P300 sinais. Padrões de P300 ondas são geradas involuntariamente
( estímulo-feedback ) quando as pessoas vêem algo que eles reconhecem e pode
permitir BCIs para decodificar categorias de pensamentos sem pacientes de
treinamento em primeiro lugar. Em contraste, os biofeedback métodos descritos
acima requerem aprender a controlar ondas cerebrais assim a actividade cerebral
resultante pode ser detectado.
Lawrence Farwell e Emanuel Donchin desenvolveu uma interface cérebro-
computador baseado em EEG na década de 1980. [ 34 ] A "prótese mental", usou o
P300 resposta ondas cerebrais para permitir que indivíduos, incluindo um
paralisado locked-in syndrome paciente, para comunicar palavras, letras e
comandos simples para um computador e, consequentemente, a fala através de
um sintetizador de voz conduzidos pelo computador. Um certo número de
dispositivos semelhantes têm sido desenvolvidos desde então. Em 2000, por
exemplo, a pesquisa por Jessica Bayliss na Universidade de Rochester mostrou
que os voluntários usando realidade virtual capacetes poderia controlar elementos
em um mundo virtual usando seus P300 leituras EEG, inclusive transformando as
luzes e desligar e trazer um carro mock-up de um parar. [ 35 ]
Enquanto uma interface cérebro-computador baseado em EEG tem sido
perseguido exaustivamente por um número de laboratórios de pesquisa, os
avanços recentes feitas por Bin Ele e sua equipe da Universidade de
Minnesota sugerem o potencial de uma interface cérebro-computador baseado
em EEG para realizar tarefas perto invasivo interface cérebro-
computador. Usando técnicas de neuroimagem funcional avançada, incluindo
funcional BOLD MRI e EEG imagem fonte, Bin He e colegas de trabalho
identificou a co-variação e co-localização de sinais eletrofisiológicos e
hemodinâmicos induzidos pela imaginação motor. [ 36 ] Refinado por uma
abordagem de neuroimagem e por uma formação protocolo, Bin He e colegas de
trabalho demonstraram a capacidade de uma interface não-invasivo baseado em
EEG cérebro-computador para controlar o vôo de um helicóptero virtual no espaço
3-dimensional, com base imaginação motor. [ 37 ] Em junho de 2013, foi anunciado
que Bin Ele desenvolveu a técnica para permitir que um helicóptero de controle
remoto para ser guiado através de uma pista de obstáculos. [ 38 ]
Além de uma interface cérebro-computador baseado em ondas cerebrais, como
gravados a partir do couro cabeludo eletrodos de EEG, Bin Ele e os colegas de
trabalho explorou uma interface cérebro-computador virtual EEG baseado em
sinal de EEG primeiro resolver o problema inverso e, em seguida, usou o virtual
resultante EEG para tarefas de interface cérebro-computador.Estudos bem
controlados sugeriram os méritos de tal interface cérebro-computador de origem
análise baseada. [ 39 ]
Matrizes de eletrodos ativos secos [ edição ]
No início de 1990 Babak Taheri, a University of California, Davis demonstrou os
primeiros conjuntos de eletrodos ativos secos individuais e também multicanal,
utilizando micro-usinagem. O único canal seco construção eletrodo de EEG e os
resultados foram publicados em 1994. [ 40 ] O eletrodo vestiu também foi
demonstrado um bom desempenho comparado ao de prata / cloreto de
prata eletrodos. O dispositivo consistia de quatro locais de sensores com
eletrônica integrada para reduzir o ruído de casamento de impedância . As
vantagens de tais eléctrodos são: (1) ausência de electrólito utilizado, (2)
nenhuma preparação para a pele, (3) reduziu significativamente o tamanho do
sensor, e (4) compatibilidade com os sistemas de monitorização do EEG. O
conjunto de eléctrodos activa é um sistema integrado feito de uma matriz de
sensores capacitivos, circuitos integrados locais alojado num pacote com baterias
para alimentar o circuito. Este nível de integração foi necessário para alcançar o
desempenho funcional obtido pelo eletrodo.
O eletrodo foi testado em uma bancada de teste elétrico e em seres humanos em
quatro modalidades de atividade EEG, a saber: (1) EEG espontâneo, (2) os
potenciais relacionados a eventos sensoriais, (3) potenciais do tronco cerebral, e
(4) evento cognitivo potenciais relacionados. O desempenho do eléctrodo seco
comparado favoravelmente com a dos eléctrodos padrão molhado em termos de
preparação para a pele, não há exigências gel (seco), e mais elevada relação
sinal-ruído. [ 41 ]
Em 1999, pesquisadores da Case Western Reserve University ,
em Cleveland , Ohio , liderado por Hunter Peckham, usou 64 eletrodos solidéu
EEG para retornar movimentos limitados de mão para tetraplégico Jim
Jatich. Como Jatich concentrou-se em conceitos simples, mas opostas como cima
e para baixo, o seu ritmo de produção de beta-EEG foi analisada utilizando
software para identificar padrões no ruído. Um padrão básico foi identificado e
usado para controlar um switch: atividade acima da média foi ativado, abaixo fora
da média. Bem como permitir Jatich para controlar um cursor de computador os
sinais também foram utilizados para conduzir os controladores nervosos
embutidos em suas mãos, restaurar algum movimento. [ 42 ]
Outra pesquisa [ edição ]
Eletrônico redes neurais foram implantados que mudar a fase de aprendizagem
do usuário para o computador. Experimentos de cientistas da Sociedade
Fraunhofer , em 2004, utilizando redes neurais levaram a melhorias visíveis
dentro de 30 minutos de treinamento. [ 43 ]
Experimentos feitos por Eduardo Miranda , na Universidade de Plymouth ,
no Reino Unido , tem objetivo de usar gravações de EEG de atividade mental
associados com a música para permitir que as pessoas com deficiência a se
expressar musicalmente através de um encephalophone . [ 44 ] Ramaswamy
Palaniappan foi pioneira no desenvolvimento do BCI para usar em biometriapara
identificar / autenticar uma pessoa. [ 45 ] O método também tem sido sugerido para
utilização como dispositivo de geração de código PIN (por exemplo, em
operações bancárias ATM e internet. [ 46 ] O grupo que está agora a Universidade
de Birmingham foi anteriormente desenvolvido controle de cursor analógico
usando pensamentos. [ 47 ]
Pesquisadores da Universidade de Twente, na Holanda foram a realização de
pesquisas sobre o uso de BCIs para pessoas sem deficiência, propondo que BCIs
poderia melhorar o tratamento de erros, o desempenho da tarefa, e experiência
do usuário e que poderiam ampliar o espectro usuário. [ 48 ] Eles particularmente
focada em jogos BCI, [ 49 ] , sugerindo que os jogos BCI poderia fornecer desafio,
fantasia e sociabilidade para os jogadores do jogo e poderia, assim, melhorar a
experiência do jogador. [ 50 ]
A Emotiv empresa tem vindo a vender um controlador de jogo de vídeo comercial,
conhecido como O Epoc, desde dezembro de 2009. O Epoc usa sensores
eletromagnéticos. [ 51 ] [ 52 ]
A primeira sessão BCI com uma precisão de 100% (baseado em 80 direita e 80 a
imaginação do movimento da mão esquerda), foi registrado em 1998 por
Christoph Guger. O sistema BCI usados 27 eletrodos que cobrem o córtex
sensório-motor, ponderados os eletrodos com padrões espaciais comuns,
calculada a variação correndo e usou uma análise discriminante linear . [ 53 ]
A investigação está em curso sobre o uso militar do BCI e desde os anos
1970 DARPA foi financiando pesquisas sobre este tema. [ 1 ] [ 2 ] O foco atual da
pesquisa é a comunicação usuário-usuário através da análise de sinais
neurais. [ 54 ] O projeto "Silent Talk" tem como objetivo detectar e analisar os sinais
neurais específicos de palavra, usando EEG, o que ocorrer antes do discurso é
vocalizado, e ver se os padrões são generalizáveis. [ 55 ]
MEG e MRI [ edição ]
Artigos principais: Magnetoencefalografia e ressonância magnética
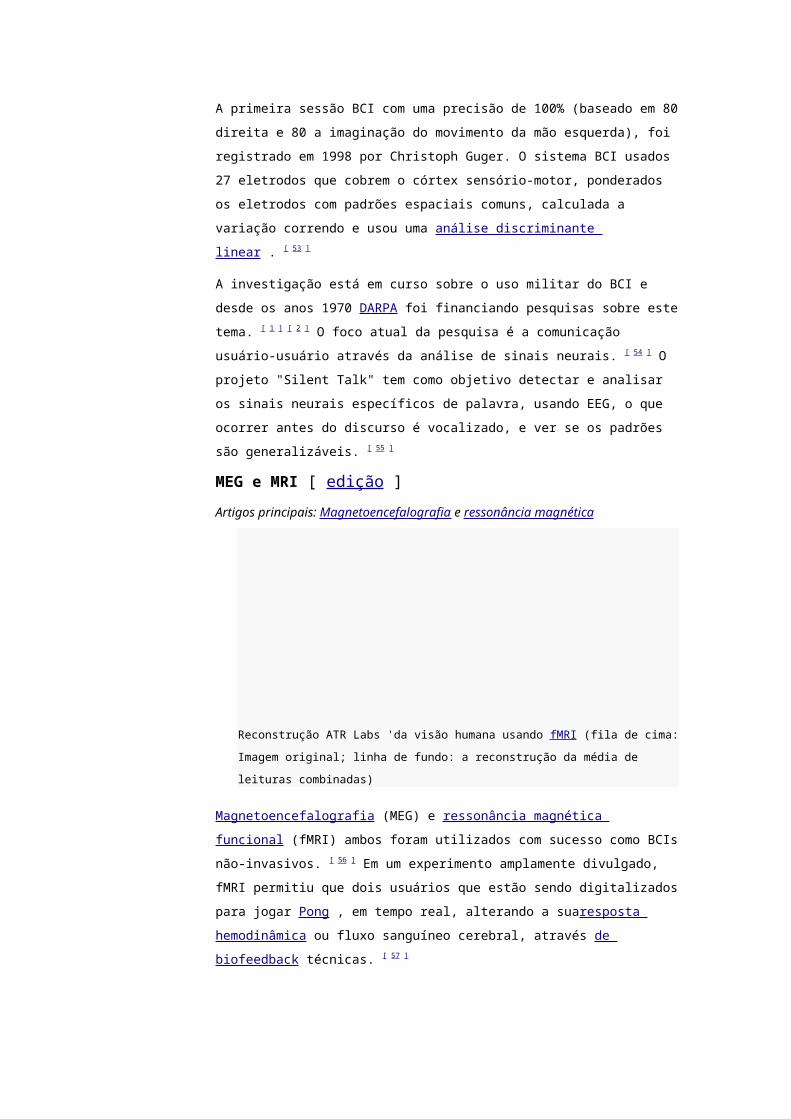
Reconstrução ATR Labs 'da visão humana usando fMRI (fila de cima: Imagem original;
linha de fundo: a reconstrução da média de leituras combinadas)
Magnetoencefalografia (MEG) e ressonância magnética funcional (fMRI) ambos
foram utilizados com sucesso como BCIs não-invasivos. [ 56 ] Em um experimento
amplamente divulgado, fMRI permitiu que dois usuários que estão sendo
digitalizados para jogar Pong , em tempo real, alterando a suaresposta
hemodinâmica ou fluxo sanguíneo cerebral, através de biofeedback técnicas. [ 57 ]
RMf medições de respostas hemodinâmicas em tempo real, também têm sido
utilizados para controlar braços robóticos, com um atraso de sete segundos entre
pensamento e movimento. [ 58 ]
Em 2008, pesquisa desenvolvida na Advanced Research Telecomunicações
(ATR) Computational Neuroscience Laboratories em Kyoto , no Japão, permitiu
aos cientistas reconstruir imagens diretamente do cérebro e exibi-los em um
computador. O artigo anunciando essas conquistas foi areportagem de capa da
revista Neuron , de 10 de dezembro de 2008. [ 59 ] Enquanto os primeiros
resultados são limitados a imagens em preto e branco de 10x10 quadrados
( pixels ), de acordo com os pesquisadores desenvolvimento da tecnologia pode
fazer possível conseguir imagens a cores, e até mesmo ver ou gravar
sonhos. [ 60 ] [ 61 ]
Em 2011, pesquisadores da UC Berkeley publicados [ 62 ] um estudo relatando
segundo-a-segundo a reconstrução de vídeos assistidos por sujeitos do estudo, a
partir de dados de fMRI. Isto foi conseguido através da criação de um modelo
estatístico relativo padrões visuais em vídeos mostrados aos sujeitos, a atividade
do cérebro causada por assistir os vídeos. Este modelo foi usado para procurar os
100 segmentos de um segundo vídeo, em um banco de dados de 18 milhões de
segundos de aleatórios do YouTube vídeos, cujos padrões visuais mais
estreitamente alinhados a atividade cerebral registrada quando os participantes
assistiram a um novo vídeo. Estes 100 extratos de um segundo vídeo foram então
combinadas em uma imagem purê-up que se assemelhava ao vídeo que está
sendo vigiado. [ 63 ] [ 64 ] [ 65 ]
Neurogaming [ edição ]
Atualmente, há um novo campo de jogo chamado Neurogaming, que usa não-
invasivo BCI, a fim de melhorar a jogabilidade de modo que os usuários podem
interagir com a consola sem o uso de um joystick tradicional. [ 66 ] usar algum
software Neurogaming ondas cerebrais de um jogador , freqüência cardíaca,
expressões, dilatação da pupila, e até mesmo emoções para completar tarefas ou
afetar o clima do jogo. [ 67 ] Por exemplo, os desenvolvedores de jogos
no Emotiv criaram não-invasivo BCI que irá determinar o modo de um jogador e
ajustar música ou cenário em conformidade. Ao lado Neurogaming, melhorias
tecnológicas em luvas de jogos como o Peregrine luva [ 68 ] estão integrando novas
formas mais eficientes de jogo para PC usuários. Esta nova forma de interação
entre o jogador eo software vai permitir que um jogador tem uma experiência de
jogo mais realista. [ 69 ] Porque haverá menos desconexão entre jogador e console,
Neurogaming vai permitir que as pessoas utilizam o seu "estado psicológico" [ 70 ] e
ter suas reações transferir para jogos em tempo real. [ 69 ]
No entanto, desde Neurogaming ainda está em seus primeiros estágios, pouco se
escreveu sobre a nova indústria. Devido a isso, a primeira Conferência
NeuroGaming será realizada em San Francisco em maio 01-02, 2013. [ 71 ]
Telepatia sintética / comunicação silenciosa [ edição ]
Em uma iniciativa de 6.300 mil dólares Exército de inventar dispositivos para
comunicação telepática, Gerwin Schalk , subscrito em uma doação de US $ 2,2
milhões, descobriram que é possível usar sinais ECOG para discriminar as vogais
e consoantes embutidos falada e em palavras imaginadas. Os resultados lançam
luz sobre os mecanismos distintos associados com a produção de vogais e
consoantes, e poderia servir de base para a comunicação baseada cérebro
usando discurso imaginário. [ 32 ] [ 72 ]
A pesquisa sobre telepatia sintética usando subvocalization está ocorrendo na
Universidade da Califórnia, em Irvine sob liderança cientista Mike D'Zmura. A
primeira comunicação ocorreu na década de 1960 usando EEG para criar código
Morse usando ondas cerebrais alfa. Usando EEG para comunicar discurso
imaginário é menos preciso do que o método invasivo de colocação de um
eletrodo entre o crânio eo cérebro. [ 73 ]
Comercialização [ edição ]
John Donoghue e seus colegas pesquisadores fundada Cyberkinetics . A empresa
comercializa seus matrizes de eletrodos sob a BrainGate nome do produto e
estabeleceu o desenvolvimento de BCIs práticas para os seres humanos como
seu principal objetivo. O BrainGate baseia-se na matriz de Utah desenvolvido por
Dick Normann.
Philip Kennedy fundada Neural Signals , em 1987, para desenvolver BCIs que
permitiriam que pacientes paralisados para se comunicar com o mundo exterior e
controlar dispositivos externos.Assim como uma BCI invasiva, a empresa também
vende um implante para restaurar a fala. "Communicator cérebro" dispositivo BCI
"Neural Signals utiliza cones de vidro contendo microeletrodos revestidos com
proteínas para incentivar os eletrodos se ligar aos neurônios.
Apesar de 16 pacientes pagantes foram tratados com William Dobelle visão BCI,
novos implantes deixado dentro de um ano da morte de Dobelle em 2004. A
empresa controlada por Dobelle,Avery Biomedical Devices , e Stony Brook
University estão continuando o desenvolvimento do implante, que ainda não
recebeu a Food and Drug Administration aprovação para a implantação humana
nos Estados Unidos. [ 74 ]
Ambiente, em uma conferência de desenvolvedores de TI no início de 2008,
mostrou um produto que eles têm no desenvolvimento chamar O Audeo . O
Audeo visa criar uma interface humano-computador para comunicação sem a
necessidade de controle do motor física ou a produção da fala. Usando
processamento de sinal, o discurso unpronounced pode ser traduzido a partir de
sinais neurológicos interceptadas. [ 75 ]
Mindball é um produto, desenvolvido e comercializado pela sueca empresa Linha
de Produtos interativo, no qual os jogadores competem para controlar o
movimento de uma bola sobre uma mesa, tornando-se mais relaxado e
focado. [ 76 ] O objetivo da Interativo Linha de Produtos é desenvolver e vender
produtos de EEG facilmente compreensível que treinar a capacidade de relaxar e
se concentrar. [ 77 ]
Um austríaco empresa chamada Guger Technologies ou [ 78 ] g.tec , vem
oferecendo sistemas de interface cérebro computador desde 1999. A empresa
fornece modelos de base do BCI como plataformas de desenvolvimento para a
comunidade de pesquisa para construir em cima, incluindo o P300 Speller,
imagética motora, e em Regime potencial evocado visual. g.tec recentemente
desenvolvido sistema de eléctrodo seco g.SAHARA, que pode fornecer sinais
comparáveis aos sistemas baseados em gel. [ 79 ]
Espanhol empresa Starlab , entrou nesse mercado em 2009, com um sistema de
4 canais sem fio chamado Enobio . Em 2011 Enobio 8 e 20 canais (CE Medical)
foi lançado e agora é comercializado por Starlab spin-off Neuroelectrics Projetado
para fins de investigação médica eo sistema fornece um tudo em uma solução e
uma plataforma para desenvolvimento de aplicações. [ 80 ]
Existem três principais-dispositivos de consumo comerciais concorrentes nesta
área (data de lançamento mencionada entre parênteses) que lançaram esses
dispositivos principalmente para jogos-e-usuários de PC:
Atuador Neural Impulse (abril de 2008)
Emotiv Sistemas (Dezembro de 2009)
NeuroSky (MindSet - Junho de 2009; Tio Milton Force Trainer - Outono de
2009, a Mattel MindFlex - Summer, 2009)
Em 2009, o primeiro sistema de escrita baseada em EEG pessoal do mundo
chegou ao mercado: intendiX . O sistema pode trabalhar com eletrodos de EEG
secos passiva, ativa, ou novo. A primeira versão utilizada atividade P300 para
digitar em um teclado do tipo matriz. Além de escrever o texto, o paciente também
pode usar o sistema para disparar um alarme, deixe o computador falar o texto
escrito, imprimir ou copiar o texto em um e-mail ou enviar comandos para os
dispositivos externos. Em março de 2012, g.tec estreou um novo módulo
chamado intendiX a tela Overlay Control Interface (SOCI) que pode permitir aos
usuários jogar World of Warcraft ou Angry Birds.
De cultura celular BCIs [ edição ]
Ver artigo principal: rede neuronal Cultivadas
Pesquisadores criaram dispositivos de interface com células neurais e inteiras
redes neurais em culturas de fora animais. Bem como promover pesquisas sobre
dispositivos implantáveis animais, as experiências sobre o tecido neural culta têm-
se centrado na construção de redes de resolução de problemas, construção de
computadores básicos e manipulação de dispositivos robóticos.Investigação de
técnicas para estimular e gravar a partir de neurônios individuais cultivadas em
chips semicondutores é muitas vezes referida como neuroelectronics
ou neurochips . [ 81 ]
O primeiro do mundo neurochip, desenvolvido pela Caltechpesquisadores Jerome Pine
e Michael Maher
Desenvolvimento do primeiro trabalho neurochip foi reivindicado por uma equipe
Caltech liderada por Jerome Pine e Michael Maher, em 1997. [ 82 ] O chip Caltech
tinha espaço para 16 neurônios.
Em 2003, uma equipe liderada por Theodore Berger, na University of Southern
California , começou a trabalhar em um neurochip projetado para funcionar como
uma prótese artificial ou hipocampo . O neurochip foi concebido para funcionar em
cérebros de rato e foi concebido como um protótipo para o desenvolvimento
eventual de cérebro de maior prótese. O hipocampo foi escolhida porque se
pensa ser a parte mais ordenado e estruturado de cérebro e é a área mais
estudada. Sua função é codificar experiências para armazenamento como
memória a longo prazo em qualquer outro local no cérebro. [ 83 ]
Thomas DeMarse na Universidade da Flórida usaram uma cultura de 25.000
neurônios retirados do cérebro de um rato a pilotar um F-22 jet fighter simulador
de aeronave . [ 84 ] Após a coleta, os neurônios corticais foram cultivadas em
uma placa de Petri e rapidamente começou a reconectar-se para formar uma rede
neural estar. As células foram distribuídas por uma grade de eléctrodos 60 e
usada para controlar o arremesso e yaw funções do simulador. O foco do estudo
foi a compreensão de como o cérebro humano aprende e realiza tarefas
computacionais em um nível celular.
Considerações éticas [ editar ]
Importantes questões éticas, legais e sociais relacionadas com a interface
cérebro-computador são: [ 85 ] [ 86 ] [ 87 ] [ 88 ]
questões conceituais (pesquisadores discordam sobre o que é eo que não é
uma interface cérebro-computador), [ 88 ]
obtenção do consentimento informado de pessoas que têm dificuldade para
se comunicar,
risco / benefício,
responsabilidade partilhada entre BCI equipes (por exemplo, como garantir
que as decisões do grupo responsáveis podem ser feitas),
as conseqüências da tecnologia BCI para a qualidade de vida dos pacientes
e suas famílias,
efeitos colaterais (por exemplo, neurofeedback de treinamento sensório-
motor ritmo é relatado para afetar a qualidade do sono),
responsabilidade pessoal e suas possíveis restrições (por exemplo, quem é
responsável por ações errôneas com neuroprosthesis)
questões relativas à personalidade e personalidade e sua possível alteração,
aplicações terapêuticas e sua eventual superação,
questões de ética em pesquisa que surgem quando progredindo de
experimentação animal para aplicação em seres humanos,
leitura da mente e privacidade,
de controle da mente ,
o uso da tecnologia em técnicas de interrogatório avançadas pelas
autoridades governamentais,
valorização seletiva e estratificação social, e
comunicação com a mídia.
Clausen afirmou em 2009 que "BCIs colocam desafios éticos, mas estes são
conceitualmente semelhantes às que bioeticistas têm abordado por outros reinos
de terapia". [ 85 ] Além disso, ele sugere que a bioética é bem preparado para lidar
com os problemas que surgem com tecnologias BCI. Haselager e
colegas [ 86 ] apontou que as expectativas de BCI eficácia e valor desempenhar um
grande papel na análise ética e da forma como os cientistas BCI deve se
aproximar da mídia. Além disso, os protocolos padrão pode ser implementado
para garantir eticamente procedimentos de consentimento informado com os
pacientes locked-in.
Pesquisadores estão bem cientes que as orientações éticas sólidas, entusiasmo
adequadamente moderado na cobertura da mídia e educação sobre sistemas BCI
será de extrema importância para a aceitação social dessa tecnologia. Assim,
recentemente, mais esforço é feito dentro da comunidade BCI para criar consenso
sobre as diretrizes éticas para a pesquisa BCI, desenvolvimento e difusão. [ 88 ]
De baixo custo baseados em BCI Interfaces [ edição ]
Recentemente, uma série de empresas reduziu tecnologia EEG classe médica (e
em um caso, NeuroSky, reconstruído a tecnologia a partir do zero) para criar BCIs
baratos. Esta tecnologia tem sido construído em brinquedos e dispositivos de
jogos, alguns destes brinquedos têm sido extremamente bem sucedido
comercialmente como o NeuroSky e Mattel MindFlex.
Em 2006 a Sony patenteou um sistema de interface neural permitindo ondas
de rádio para afetar os sinais do córtex neural. [ 89 ]
Em 2007 NeuroSky lançou o primeiro consumidor a preços acessíveis com
base EEG juntamente com o NeuroBoy jogo. Este também foi o primeiro
dispositivo de EEG em larga escala a usar a tecnologia de sensor de
seca. [ 90 ]
Em 2008 OCZ Technology desenvolveu um dispositivo para uso em jogos de
vídeo contando principalmente com eletromiografia . [ 91 ]
Em 2008, o Final Fantasy desenvolvedora Square Enix anunciou que uma
parceria com NeuroSky para criar um jogo, Judecca. [ 92 ] [ 93 ]
Em 2009, a Mattel em parceria com NeuroSky para liberar o Mindflex , um
jogo que usou um EEG para orientar a bola através de um percurso de
obstáculos. De longe o melhor consumidor de venda com base EEG até à
data. [ 92 ] [ 94 ]
Em 2009 Uncle Milton Industries em parceria com NeuroSky para liberar
o Star Wars Force Trainer , um jogo desenhado para criar a ilusão de possuir
a força. [ 92 ] [ 95 ]
Em 2009 Emotiv Sistemas lançou o EPOC, um aparelho de EEG 14 canais
que pode ler quatro estados mentais, 13 estados conscientes, expressões
faciais e movimentos de cabeça. O EPOC é o primeiro comercial BCI utilizar
tecnologia de sensor de seca, que pode ser humedecido com uma solução
salina para uma melhor ligação. [ 51 ]
Em novembro de 2011 a revista Time selecionou "Necomimi", produzido
por Neurowear como uma das melhores invenções do ano. A empresa
anunciou que deve lançar uma versão do consumidor do vestuário, que
consiste em orelhas de gato controladas por um leitor de ondas cerebrais
produzidas por NeuroSky , na Primavera de 2012. [ 96 ]
Em março de 2012 g.tec introduziu o intendiX-SPELLER, sistema BCI
primeiro disponível comercialmente para uso doméstico, que pode ser usado
para controlar os jogos de computador e aplicativos. Ele pode detectar
diferentes sinais cerebrais com uma precisão de 99%. [ 97 ] g.tec já recebeu
várias excursões oficina para demonstrar o sistema intendiX e outro hardware
e software para o público, como uma turnê de workshops g.tec de os EUA
Oeste Costa em setembro de 2012.
Em janeiro de 2013 Hasaca Universidade Nacional (HNU) anunciou primeiro
programa de mestrado em design de aplicações de realidade virtual Cérebro
do computador interface.
Ficção ou especulação [ edição ]
Veja também a categoria: interface cérebro-computador na ficção
A perspectiva de BCIs e implantes cerebrais de todos os tipos têm sido temas
importantes na ficção científica . Veja implantes cerebrais em ficção e
filosofia para uma revisão dessa literatura.
Veja também [ editar ]
Portal Neuroscience
Augmented aprendizagem
Cyborg projeto
A neuroestimulação
Realidade simulada
Deite-se de detecção
Efeito auditivo de microondas
Nootropic
Telepresença
Identificação pensamento
Emulação do cérebro inteiro
Comparação de interfaces cérebro-computador do consumidor
Eletroencefalografia
Referências [ editar ]
1. ^ um b Vidal, JJ (1973). "Para a comunicação cérebro-computador
direto". revisão anual de biofísica e bioengenharia 2 :. 157-
80 doi : 10.1146/annurev.bb.02.060173.001105 . PMID 4.583.653 .
2. ^ a b J. . Vidal (1977) "Detecção em tempo real de eventos cerebrais no
EEG" . IEEE Proceedings 65 (5):. 633-641 doi : 10.1109/PROC.1977.10542 .
3. ̂ Levine, SP; Huggins, JE; Bement, SL; Kushwaha, RK; Schuh, LA; Rohde,
MM; Passaro, EA; Ross, DA et al. (2000). "A interface direta do cérebro com
base em potenciais relacionados a eventos". IEEE Transactions on
engenharia de reabilitação: a publicação do IEEE de Engenharia em
Medicina e Biologia Society 8 (2): 180-
5. doi : 10.1109/86.847809 . PMID 10896180 .
4. ̂ NIH Publication No. 11-4798 (1 Março 2011). "Implante Coclear" . Instituto
Nacional de Surdez e Outros Distúrbios de Comunicação .
5. ̂ Miguel Nicolelis et al. (2001) Duke neurobiólogo tem sistema que permite
que macacos para controlar braços robóticos por meio de sinais cerebrais
desenvolvido
6. ̂ Baum, Michele (6 de Setembro de 2008). "Macaco Usa o poder do cérebro
para se alimentar Com Braço Robótico" . Pitt Chronicle . Retirado
2009/07/06 .
7. ̂ Fetz, EE (1969). "Condicionamento Operante de Atividade Unidade
Cortical." Ciência 163(3870):. 955-8 Bibcode : 1969Sci ... 163 ..
955g . doi : 10.1126/science.163.3870.955 .PMID 4.974.291 .
8. ̂ Schmidt, EM; McIntosh, JS; Durelli, L; Bak, MJ (1978). "Control Multa de
padrões de disparo operantly condicionado de neurônios
corticais." Experimental Neurology 61 (2):. 349-69 doi :10.1016/0014-4886
(78) 90252-2 . PMID 101.388 .
9. ̂ Georgopoulos, A.; Lurito, J.; Petrides, M, de Schwartz, A.; Massey, J.
(1989). "A rotação mental do vetor população neuronal." Ciência 243 (4888):.
234-6 Bibcode : 1989Sci ... 243 ..
234g .doi : 10.1126/science.2911737 . PMID 2.911.737 .
10. ̂ . Lebedev, MA; Nicolelis, MA (2006) "interfaces cérebro-máquina: passado,
presente e futuro" . Tendências em neurociências 29 . (9): 536-
46 doi : 10.1016/j.tins.2006.07.004 .PMID 16859758 .
11. ̂ . Stanley, GB; Li, FF; Dan, Y (1999), "Reconstrução de cenas naturais a
partir das respostas de conjunto no núcleo geniculado lateral" . Journal of
Neuroscience 19 (18): 8036-42. PMID 10479703 .
12. ̂ Nicolelis, Miguel AL; Wessberg, Johan; Stambaugh, Christopher R.; Kralik,
Jerald D.; Beck, Pamela D.; Laubach, Mark; Chapin, John K.; Kim, Jung et
al. (2000). "Previsão em tempo real de trajetória mão por conjuntos de
neurônios corticais em primatas". Nature 408 (6810):. 361-
5 doi : 10.1038/35042582 . PMID 11099043 .
13. ^ um b Carmena, JM; Lebedev, MA; Crist, RE; O'Doherty, JE; Santucci, DM;
Dimitrov, DF; Patil, PG; Henriquez, CS et al. . (2003) "Aprendendo a controlar
a interface cérebro-máquina para alcançar e agarrar por primatas" . PLoS
Biology 1 (2):.
E42 doi :10.1371/journal.pbio.0000042 . PMC 261.882 . PMID 14624244 .
14. ^ um b Lebedev, MA; Carmena, JM; O'Doherty, JE; Zacksenhouse, M;
Henriquez, CS; Príncipe, JC; Nicolelis, MA (2005). "Cortical Adaptação
Ensemble para representar velocidade de um atuador artificial controlado por
uma interface cérebro-máquina." Journal of Neuroscience 25(19):. 4681-
93 doi : 10.1523/JNEUROSCI.4088-04.2005 . PMID 15888644 .
15. ̂ Serruya, MD; Hatsopoulos, NG; Paninski, L; Fellows, MR; Donoghue, JP
(2002). . "Controle instantâneo neural de um sinal de
movimento" Nature 416 (6877): 141-2. Bibcode :2002Natur.416 ..
141S . doi : 10.1038/416141a . PMID 11894084 .
16. ̂ Taylor, DM; Tillery, SI; Schwartz, AB (2002). "Controle Cortical direta de 3D
neuroprosthetic Dispositivos". Ciência 296 (5574):. 1829-
1832 Bibcode : 2002Sci ...
296.1829T . doi :10.1126/science.1070291 . PMID 12052948 .
17. ̂ equipe Pitt para construir no braço cérebro controlado , Pittsburgh Tribune
revisão , 5 de Setembro de 2006.
18. ̂ YouTube - Macaco controla um braço robótico . Youtube.com. Página
visitada em 2012-05-29.
19. ̂ Velliste, M; Perel, S; Spalding, MC; Whitford, AS; Schwartz, AB
(2008). "controle cortical de um braço protético para a auto-
alimentação" . Nature 453 (7198):. 1098-101 Bibcode :2008Natur .453.1098
V . doi : 10.1038/nature06996 . PMID 18509337 .
20. ̂ Musallam, S.; Corneil, BD; Greger, B; Scherberger, H; Andersen, RA
(2004). "Sinais cognitivos de controle para próteses
neurais". Ciência 305 (5681): 258-62. Bibcode : 2004Sci ... 305 ..
258M . doi : 10.1126/science.1097938 . PMID 15247483 .
21. ̂ Santucci, David M.; Kralik, Jerald D.; Lebedev, Mikhail A.; Nicolelis, Miguel
AL (2005)."Ensembles do córtex frontal e parietal prever a atividade muscular
single-julgamento durante os movimentos atingindo em primatas." European
Journal of Neuroscience 22 (6):. 1529-1540doi : 10.1111/j.1460-
9568.2005.04320.x . PMID 16190906 .
22. ̂ Huber, D; Petreanu, L; Ghitani, N; Ranade, S; Hromádka, T; Mainen, Z;.
Svoboda, K (2008)"microstimulation óptico esparsos no córtex barril
impulsiona o comportamento aprendido em ratos movimentando-se
livremente" . Nature 451 (7174). 61-4 Bibcode : 2008Natur.451 ...
61H . doi : 10.1038/nature06445 . PMC 3.425.380 . PMID 18094685 .
23. ̂ Vision Quest , Wired Magazine , setembro de 2002
24. ̂ Naumann, J. Pesquisar Paradise: a conta de um paciente do Experimento
Visão Artificial(2012), Xlibris Corporação , ISBN 1-479-7092-04
25. ̂ Kennedy, PR; Bakay, RA (1998). "Restauração de saída neural de um
paciente paralisado por uma conexão direta do cérebro". NeuroReport 9 (8):.
1707-1711 doi : 10.1097/00001756-199806010-00007 . PMID 9.665.587 .
26. ̂ R. Leigh Hochberg, Mijail D. Serruya, Gerhard M. Friehs, Jon A. Mukand,
Maryam Saleh, Abraham H. Caplan, Almut Branner, David Chen, Richard D.
Penn e John P. Donoghue (13 de Julho 2006). "Controle Neuronal conjunto
de dispositivos protéticos por um ser humano com
tetraplegia." Nature 442 (7099): 164-171. Bibcode : 2006Natur.442 ..
164h . doi :10.1038/nature04970 . PMID 16838014 .
27. ̂ Hochberg, R. Leigh, et al. . (2012) doi : 10.1038/nature11076 . ausente ou
vazio | title = ( ajuda )
28. ̂ Collinger, Jennifer L., et al. . (2013) doi : 10.1016/S0140-6736 (12) 61816-
9 . ausente ou vazio | title = ( ajuda )
29. ̂ Serruya MD, Donoghue JP. (2003) Capítulo III: Princípios de Design de um
dispositivo protético Neuromotoras em Neuroprosthetics: Teoria e Prática,
ed. Kenneth W. Horch, Gurpreet S. Dhillon. Imperial College Press.
30. ̂ Adolescente move ícones de vídeo apenas pela imaginação , press
release, Universidade de Washington em St Louis, 09 de outubro de 2006
31. ̂ Yanagisawa, Takafumi (2011). "Control Electrocorticograpic de braço
protético em pacientes paralisados" . Associação Americana de
Neurologia . Retirado 19 de janeiro de 2012 . "BCI ECoG-Based tem
vantagem no sinal e durabilidade que são absolutamente necessárias para a
aplicação clínica"
32. ^ um b X, Pei (2011). "Vogais decodificação e consoantes em palavras faladas
e imaginou usando sinais eletrocorticográfica em seres humanos" . J Neural
Eng 046028 ser. 8.4 .Retirado 12 de fevereiro, 2012 . "Justin Williams, um
engenheiro biomédico da universidade, já transformou o implante ECoG em
um micro dispositivo q







