
GLOBAL POSITIONING SYSTEM
GLOBAL POSITIONING SYSTEM
(GPS)
(GPS)
Elaboração e Organização:
Profa. Dra. Andréia MedinilhaPancher
Car
togr
afia

Global PositioningSystem(GPS)
�GPS –sistema de rádio-navegação baseado em
satélites, desenvolvido e operado pelo DoD. Esse
sistema possibilita que usuários, em terra, mar e ar
determinem suas posições tridimensionais (latitude,
longitude e altitude), velocidade, hora,
24 horas por dia independente de condições
atmosféricas, em qualquer lugar do mundo.
�GPS–criado inicialmente para fins militares1 . Hoje,
uso universal
�Modelo básico do sistema
–E
ntr
ada
s –sinal do satélite com as informações
básicas para o cálculo de posição;
–P
roce
ssam
ento(interação das entidades para
atingir um processo de transformação) –cálculo
da posição efetuado pelos receptores e cálculo
processado pelo segmento de controle dos
parâmetros orbitais dos satélites; e,
–Saíd
as
–posição exata de uma entidade na
superfície terrestre
Hístórico
O G
PS surgiu como
produto da corrida
arm
amentista entre os
EUA e a ex-U
RSS, para
obter, em tempo real, a
posição exata de alguma
entidade (pessoa, veículo,
aeronave, míssel, navio,
etc.). Em 1973, o
Departamento de Defesa
dos EUA (DoD), iniciou o
projeto Sistema de
Posicionamento G
lobal.
O G
PS é também
conhecido por NAVigation
Satellite
withTim
e And
Ranging(N
AVSTAR) e o
primeiro foi lançado em
1978
Hístórico
O G
PS surgiu como
produto da corrida
arm
amentista entre os
EUA e a ex-U
RSS, para
obter, em tempo real, a
posição exata de alguma
entidade (pessoa, veículo,
aeronave, míssel, navio,
etc.). Em 1973, o
Departamento de Defesa
dos EUA (DoD), iniciou o
projeto Sistema de
Posicionamento G
lobal.
O G
PS é também
conhecido por NAVigation
Satellite
withTim
e And
Ranging(N
AVSTAR) e o
primeiro foi lançado em
1978
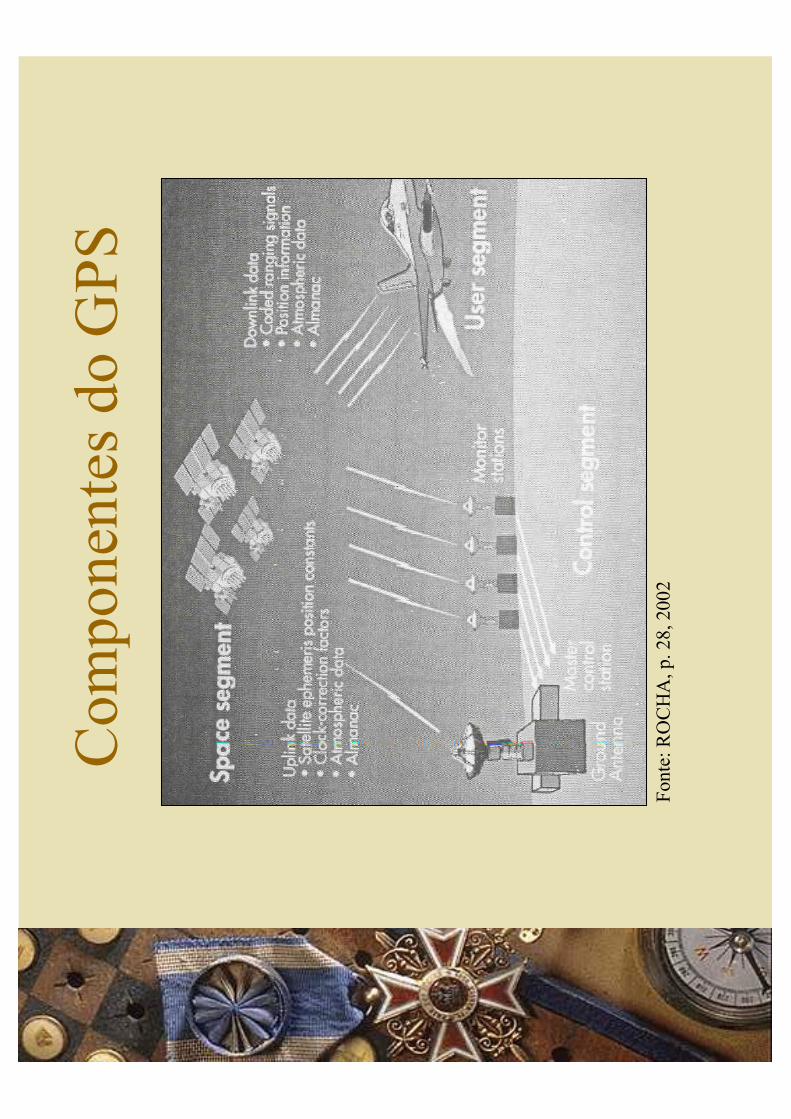
Componentes do GPS
Fonte: ROCHA, p. 28, 2002
GPS
�Sistemas de Inform
ação–sistemas de computador que
pro
cess
am
informação = informação necessária para a to
mada d
e dec
isão
�Determinação da posição
–Sis
tem
a d
e In
form
açã
o G
eográ
fica
(G
IS o
u S
IG):
ba
seado e
m
com
puta
dor
para
cole
tar,
manuse
ar
e anali
sar
dado
s geo
refe
renci
ado
s.
–In
form
açã
o g
eore
fere
nci
ada:
rela
cionada a
cer
to p
onto
da s
uper
fíci
e te
rres
tre
iden
tifi
cado p
or
coord
enada
s geo
grá
fica
s
GPS de navegação
�D
iálo
go–formado por várias telas de informações disponíveis pelo software do
receptor;
�D
ado
s–produzido pelo receptor com o contínuo cálculo da posição geográfica
corrente;
�M
odel
o–análise das atividades envolvidas na ciência ou na arte da navegação.
�Tomada de decisão programada
�O que é um receptor GPS?
–Um computador dedicado, com um dispositivo de entrada de dados (a antena
receptora das ondas de rádio enviadas pelos satélites), consistindo na base sobre a
qual é feito o cálculo da posição corrente após o ajuste do relógio do receptor pelo
do satélite
GPS
–Microprocessadores –tecnologia que impulsionou o desenvolvimento do
GPS
�Quais as possibilidades do GPS?
–Através de módulos pequenos o GPS permite o seu ajuste; Inserção de
pontos; cálculo de distâncias e azimutes, definir rotas, ativarrotas, função
MOB, etc., a fim de solucionar um problema maior que é navegar de um
ponto a outro na superfície da Terra.
�Componentes do GPS
–Segmento Espacial –satélites e seus sinais. O GPS é formado por 24
satélites, orbitandonuma altitude de 20.200km em 6 órbitas com uma
inclinação, em relação ao Equador, de 55o . Cada um realiza uma volta em
torno da Terra a cada 12 horas.
–Segmento de Controle –monitoração, geração, correção e avaliação de
todo o sistema. Há uma estação central (MASTER) nos EUA (Colorado
Springs, Colorado) e outras estações monitoras em toda a terra.
–Segmento de Usuários –todos os tipos de aplicações, métodos de
posicionamento, formas de recepção, processamento dos sinais e todos os
tipos de receptores
Como funciona o GPS?
�Dados de Código: computados a partir do código gerado pelo satélite
GPS e, em seguida, transmitidos para o usuário, por meio de um sinal
de rádio.
–GPS de navegação –C/A (Course/Acquisition) –SPS (Standard
PositioningService)
�Alm
anaque: formado por dados genéricos da localização e as
condições de todos os satélites da constelação GPS. Esse pode ser
obtido a partir de qualquer um dos satélites. Os sinais são recebidos
pelo receptor GPS por meio de circuitos eletrônicos denominados
sinais.
�O receptor captando sinais de 3 ou mais satélites, calculará a posição
atual em qualquer lugar da terra através do “software” (programa)
armazenado em sua memória. Os receptores devem “enxergar” um
mínimo de 3 satélites para o contínuo cálculo da sua posição através da
triangulação. Às vezes, mais satélites podem ser necessários para
determinar a posição.

Como o GPS calcula a posição?
�O receptor GPS mede a distância entre ele mesmo e 3 satélites no
espaço, usando essas medidas como raios de 3 esferas, cada uma delas
tendo um satélite como centro. A posição do receptor será o ponto
comum de interseção das 3 esferas. A determinação da distância e da
posição do satélite é calculada com base nos dados do almanaque (tabela
do números dos satélites com seus parâmetros orbitais) armazenado na
memória do receptor GPS.
�Após o cálculo da posição em qualquer lugar da Terra, o receptorGPS
terá sempre de cinco a doze satélites em vista. O receptor, sempre
selecionará os melhores satélites em vista para o cálculo das posições a
uma taxa de, na maioria dos receptores de navegação, 1 nova posição
por segundo.
�Posição Bidimensional (2D navigation: latitude e longitude)–3 satélites
com boa geometria.
�Posições tridimensionais (3D navigation) –4 ou mais satélites.
�O receptor GPS fornece coordenadas, altitude (em relação a um modelo
matemático da terra), velocidade, azimute e hora baseado no mínimo de
condições favoráveis; bem como distâncias, fotoperíodo, visibilidade
lunar, dentre outras.
Qual é a precisão do GPS?
�Precisão
–15 a 40 metros;
–S/A (SelectiveAvailability) –DoD: 100 metros. Eliminada em
maio de 2000
–Atualmente, precisão de 5 aos 10 metros
�DOP(Diluição da Precisão)
–Objetivo: contínua avaliação da melhor ou pior distribuição de
satélites acima do horizonte.
–Indica o melhor ou o pior momento para obter uma posição.
–Os valores de 1 a 10 são obtidos através de cálculos matemáticos,
sendo que 1 é o melhor valor e 10 o pior, isto é, baixos valores
indicam uma boa distribuição dos satélites e, altos valores de
DOP uma má distribuição.

�Altitude
–GPS fornece a altura elipsoidal referente ao Word GeodeticSystem
(WGS-84): baseia-se em geometria, onde a terra é representada
matematicamente por um elipsóide de revolução, sem considerar a
gravidade. A diferença entre o geóide e o elipsóide de revoluçãoé
denominada de o
ndula
ção g
eoid
al. A tabela abaixo permite corrigir a
altitude, ou altura elipsoidal, referente ao elipsóide WGS-84, a qual é
fornecida em metros, por qualquer receptor GPS de navegação.
Qual é a precisão do GPS?
6-6
-215
238
40oS
4-8
416
329
30oS
-5-6
-520
359
20oS
-9-13
-18
432
110oS
3-18
-27
-15
1014
0o3
-16
-42
-41
-11
110oN
30oW
40oW
50oW
60oW
70oW
80oW
Lat.Long.

�DGPS (DiferentialGPS)
–Técnica usada em tempo real ou pós-processamento
para remover a maioria dos erros no uso do GPS.
–Receptor estacionário sobre um ponto de coordenadas
conhecidas (estação base)
Qual é a precisão do GPS?
Conceitos de Cartografia
�Escala
–GPS: precisão de 10 metros, utilizado para escalas de 1:50.000 amenores.
�A form
a da Terra
–GPS calcula a posição num sistema cartesiano global (x, y, z) geocêntrico e a
apresenta na tela, no formato escolhido no “NavigationSetup”. Também, as
coordenadas estão de acordo com o elipsóide de revolução padrão (WGS-84).
–NavigationSetup–o usuário seleciona o sistema geodésico no qual as cartas
foram elaboradas. Esse sistema abrange parâmetros do elipsóide de referência
adotado pelo órgão que produziu as cartas, denominado de DatumHorizontal.
Datum
-superfície de referência que abrange 5 parâm
etros: ponto do
terreno, altura geoidal, elipsóide de referência, coordenadas astronômicas de
cada ponto de partida e azimute deste ponto. Esse forma a base para o
cálculo dos levantam
entos de controle horizontal, através do qual é
considerada a curvatura da Terra. Nível de referência ao qual asaltitudes são
referidas geralmente, porém
não a rigor o nível médio do mar.
Datu
md
e c
on
tro
le h
ori
zo
nta
l–ponto de referência geodésico que
representa a base dos levantam
entos horizontais, dos quais são conhecidos
os mesmos parâm
etros já destacados na definição de Datum
. O Datum
de
controle horizontal pode estender-se por um
continente ou limitar-se a uma
pequena área.
Datum
-superfície de referência que abrange 5 parâm
etros: ponto do
terreno, altura geoidal, elipsóide de referência, coordenadas astronômicas de
cada ponto de partida e azimute deste ponto. Esse forma a base para o
cálculo dos levantam
entos de controle horizontal, através do qual é
considerada a curvatura da Terra. Nível de referência ao qual asaltitudes são
referidas geralmente, porém
não a rigor o nível médio do mar.
Datu
md
e c
on
tro
le h
ori
zo
nta
l–ponto de referência geodésico que
representa a base dos levantam
entos horizontais, dos quais são conhecidos
os mesmos parâm
etros já destacados na definição de Datum
. O Datum
de
controle horizontal pode estender-se por um
continente ou limitar-se a uma
pequena área.
Conceitos de Cartografia
–Datumsul-americano de 1969 (SAD69)–adotado para uniformizar a rede de
controle básico continental, e destinado a todos os levantamentos de projetos de
engenharia e operações cartográficas. Para a sua determinação foi usado um
número suficiente de posições astronômicas bem distribuídas e bem amarradas a
uma rede de triangulação exata. A sua origem é a localidade chamada Chuá, no
Brasil, situada numa área de pequena perturbação. À seguir apresenta-se sua
definição:
•A
stro
nôm
ica
Latitude: 19o45’ 41”, 34 S + ou –0”, 05
Longitude: 48o06’ 07”, 80 W + ou –0”, 08
Azimute de Uberaba: (medido no sul)
271o30’ 05” 42 + ou –0”, 21
Afastamento Geoidal: N = 0 metros
Definição do Elipsóide do SAD69:
Semi-eixo maior: a = 6.378.160 metros
Achatamento: f = 1/298,25
�G
eodés
ica
Latitude: 19o45’ 41”, 6527 S
Longitude: 48o06’ 04”, 0639 W
Azimute de Uberaba: 271o30’ 04”, 05
Conceitos de Cartografia
�Coordenadas Geográficas
–Elementos (latitude e longitude) para definir a posição de um ponto
(waypoint)
�Nortes de Referência (Proa)
–N
ort
e M
agnét
ico: direção indicada pela agulha magnética da bússola. É
o referencial 0oou 360o .
–N
ort
e V
erdadei
ro: em qualquer ponto da Terra, é a direção ao ponto
Norte geográfico.
–D
ecli
naçã
o m
agnét
ica: ângulo formado entre o Norte Verdadeiro e o
Norte Magnético. Os receptores GPS, no geral, calculam
automaticamente a Declinação magnética.
�Rumos e Azimutes
–A
zim
ute: ângulo medido no sentido horário, entre a linha Norte-Sul e
esta direção, com variação entre 0oe 360o.
–R
um
o: exprime direções por meio das bússolas graduadas em
quadrantes, de 0oou 90o. O rumo é o menor ângulo horizontal que uma
direção forma coma direção Norte-Sul, nunca ultrapassa de 90o.

GPS Garmin

GPS Garmin
BIBLIO
GRAFIA
ROCHA, J. A. M. R. G
PS: uma abordagem
prática. 3aedição. Recife: Ed.
Bagaço. 2002, 184p.







