
Prof. Dr. Emilio C. Nelli Silva
1
Atuadores e Sistemas Hidráulicos
Prof. Dr. Emílio Carlos Nelli Silva
Aula 1
Escola Politécnica da USP
Departamento de Engenharia Mecatrônica e Sistemas
Mecânicos

Prof. Dr. Emilio C. Nelli Silva
2 Introdução
• Ano 200 AC: rodas d’água;
• 1600: bomba de engrenagens (Johannes Kepler);
• 1640 e 1795: prensa hidráulica (Pascal e Bramah);
• Século XIX: indústria naval (âncora, direção, guindastes);
• 1900: água é substituída por óleo; bomba de pistões axiais;
• 1910: controle de turbinas hidráulicas, motor de pistões
radiais;
• 1950: acumulador hidropenumático;
• Ápós 1960: mecanização e automação (servo hidráulica);
Hidráulica é o ramo da engenharia que estuda a aplicação de
um líquido para a tecnologia de acionamento e comando
Histórico

Prof. Dr. Emilio C. Nelli Silva
3
•Líquido em geral inflamável;
• Necessita linhas de retorno;
• Alta viscosidade vazamentos são mais difíceis;
• Líquido é em geral incompressível atuadores podem atingir
posições intermediárias com precisão Circuitos hidráulicos são
análogos aos circuitos eletrônicos analógicos.
Sistema Hidráulico Genérico
Tecnologia de Acionamento Hidráulico
Prof. Dr. Emilio C. Nelli Silva
4 Campo de Aplicação da Hidráulica
• Máquinas operatrizes, prensas, robôs
industriais;
• Máquinas de precisão
• Siderurgia, engenharia civil (comportas e
represas, pontes móveis), geração de energia
e extração mineral;
• Tratores, guindastes, máquinas agrícolas,
carros, etc..;
• Aplicações navais (controle do leme,
guindastes, etc..);
• Controle de aeronaves, trens de
aterrisagem, simuladores
de vôo, disjuntores de centrais elétricas;
• Equipamentos odontológicos e hospitalares,
postos de gasolina, prensas de lixo urbano,
etc...

Prof. Dr. Emilio C. Nelli Silva
5 Características dos Sistemas Hidráulicos
• Baixa relação peso/potência (aplicações aeronáuticas);
• Resposta rápida (inversão de movimentos);
• Variação contínua de força e velocidade nos atuadores
(sistema analógico);
• Controle de sistemas rápidos;
• Movimento preciso em sistemas lentos;
• Segurança à sobrecarga;
• Componentes lubrificados pelo próprio fluido;
• Capacidade de armazenar energia (acumuladores);
Vantagens:

Prof. Dr. Emilio C. Nelli Silva
6 Características dos Sistemas Hidráulicos
Desvantagens:
• Custo elevado em relação a sistemas mecânicos e
elétricos;
• Perdas por vazamentos internos e externos;
• Compressibilidade, embora pequena, pode afetar;
• Presença de ar (bolhas - cavitação) provoca movimento
pulsante nos atuadores;
• Cuidados com cavitação;
• Baixo rendimento devido à perda de carga nas
canalizações e nos componentes;
• Alteração da temperatura, altera a viscosidade que altera
as perdas por vazamentos. Solução: trocadores de calor;
Prof. Dr. Emilio C. Nelli Silva
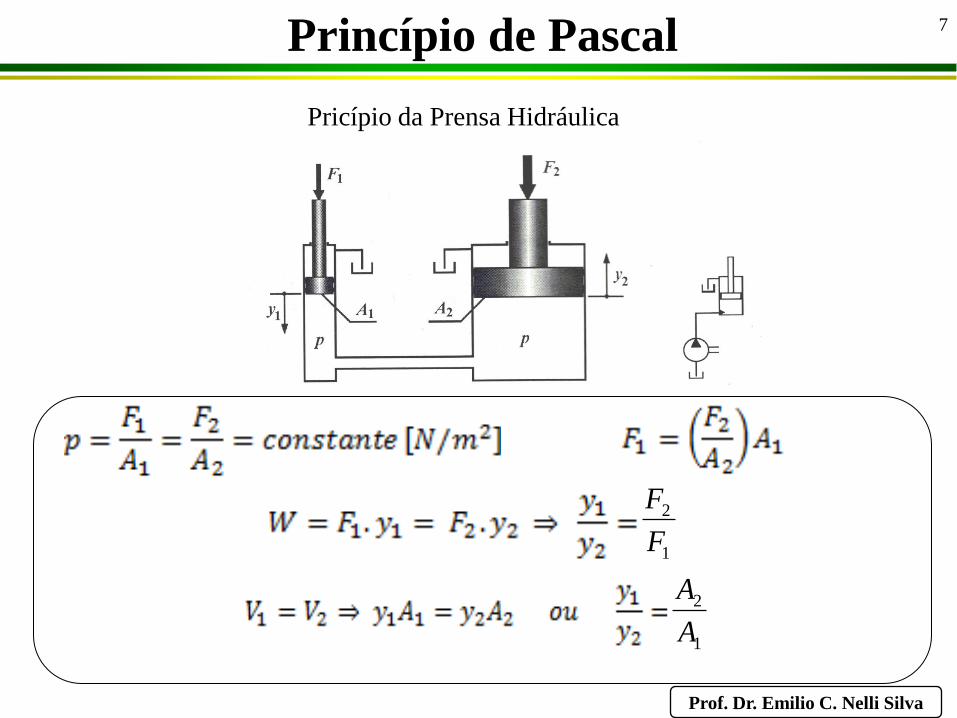
7 Princípio de Pascal
Pricípio da Prensa Hidráulica
1
2
F
F
1
2
A
A

Prof. Dr. Emilio C. Nelli Silva
8 Conservação da Massa - Eq. da Continuidade
Se escoamento incompressível (ideal): Volume de Controle Fixo
Escoamento unidimensional
em regime permanente num
componente qualquer de um
sistema
Neste caso, o volume de controle com uma
entrada e uma saída é fixo e as propriedades
são invariantes no tempo.
Prof. Dr. Emilio C. Nelli Silva
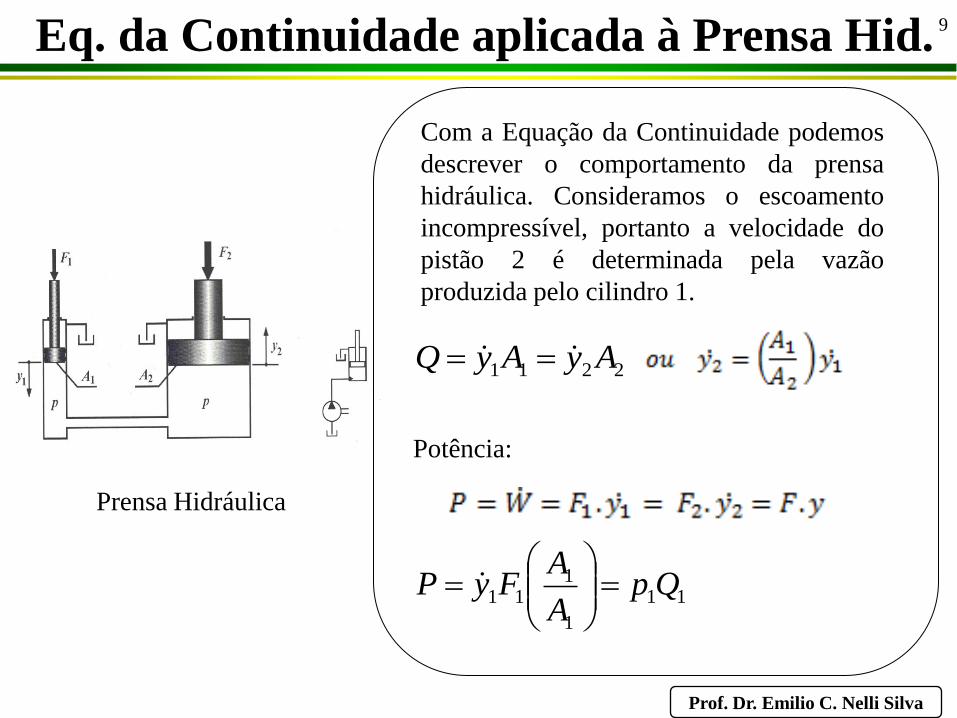
9 Eq. da Continuidade aplicada à Prensa Hid.
Potência:
Prensa Hidráulica
Com a Equação da Continuidade podemos
descrever o comportamento da prensa
hidráulica. Consideramos o escoamento
incompressível, portanto a velocidade do
pistão 2 é determinada pela vazão
produzida pelo cilindro 1.
2211 AyAyQ
11
1
111 Qp
A
AFyP
Prof. Dr. Emilio C. Nelli Silva
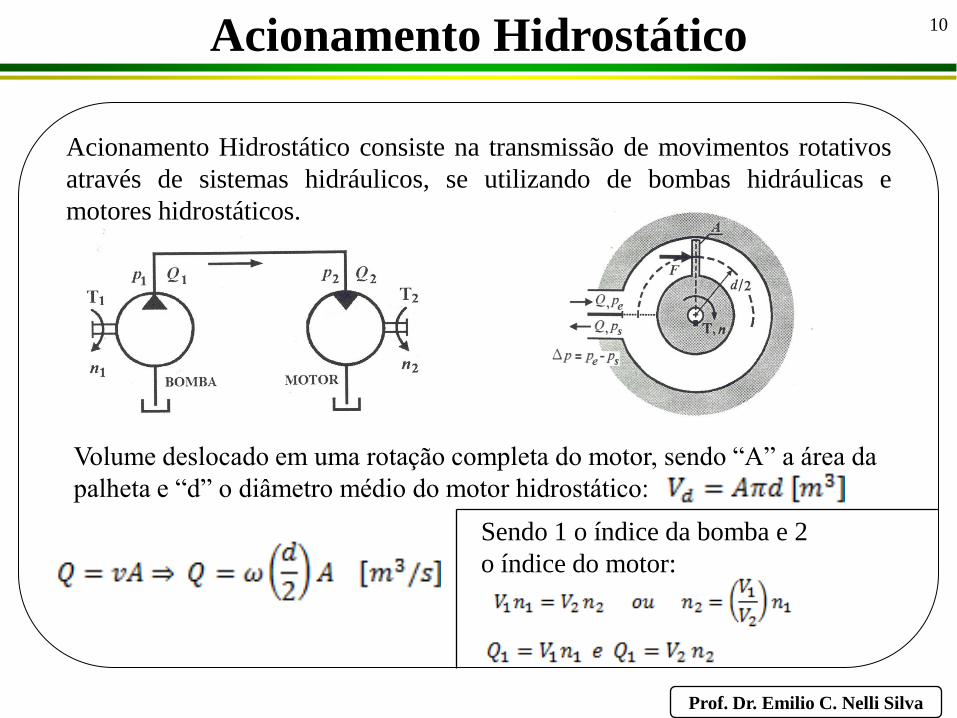
10 Acionamento Hidrostático
Acionamento Hidrostático consiste na transmissão de movimentos rotativos
através de sistemas hidráulicos, se utilizando de bombas hidráulicas e
motores hidrostáticos.
Volume deslocado em uma rotação completa do motor, sendo “A” a área da
palheta e “d” o diâmetro médio do motor hidrostático:
Sendo 1 o índice da bomba e 2
o índice do motor:
Prof. Dr. Emilio C. Nelli Silva
11 Acionamento Hidrostático
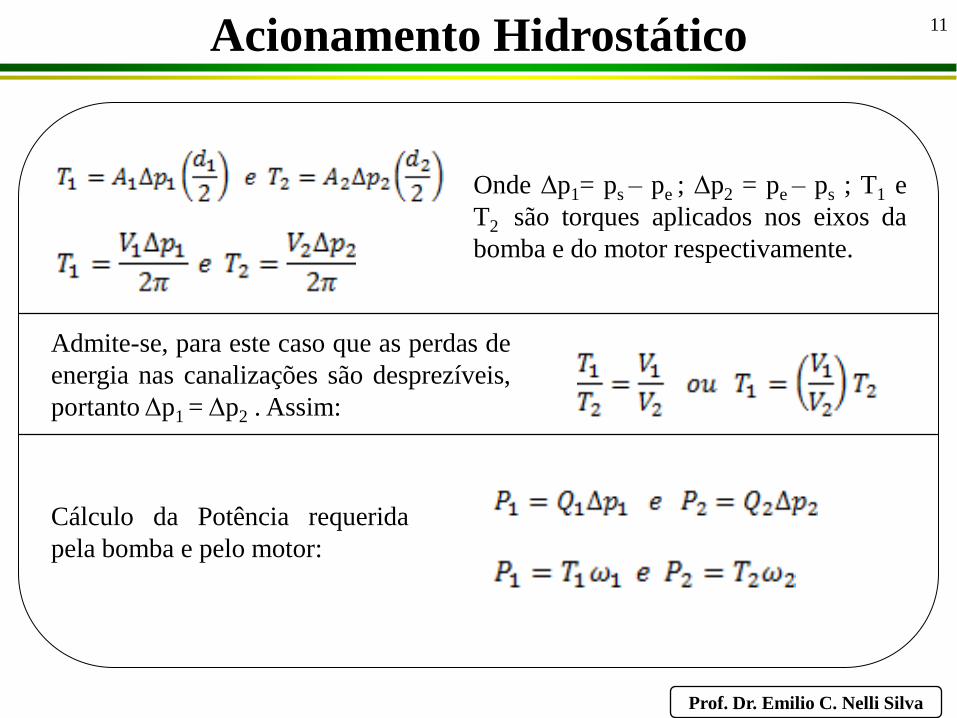
Onde Δp1= ps – pe ; Δp2 = pe – ps ; T1 e
T2 são torques aplicados nos eixos da
bomba e do motor respectivamente.
Admite-se, para este caso que as perdas de
energia nas canalizações são desprezíveis,
portanto Δp1 = Δp2 . Assim:
Cálculo da Potência requerida
pela bomba e pelo motor:
Prof. Dr. Emilio C. Nelli Silva
12 Conservação da Massa-Eq. da Continuidade
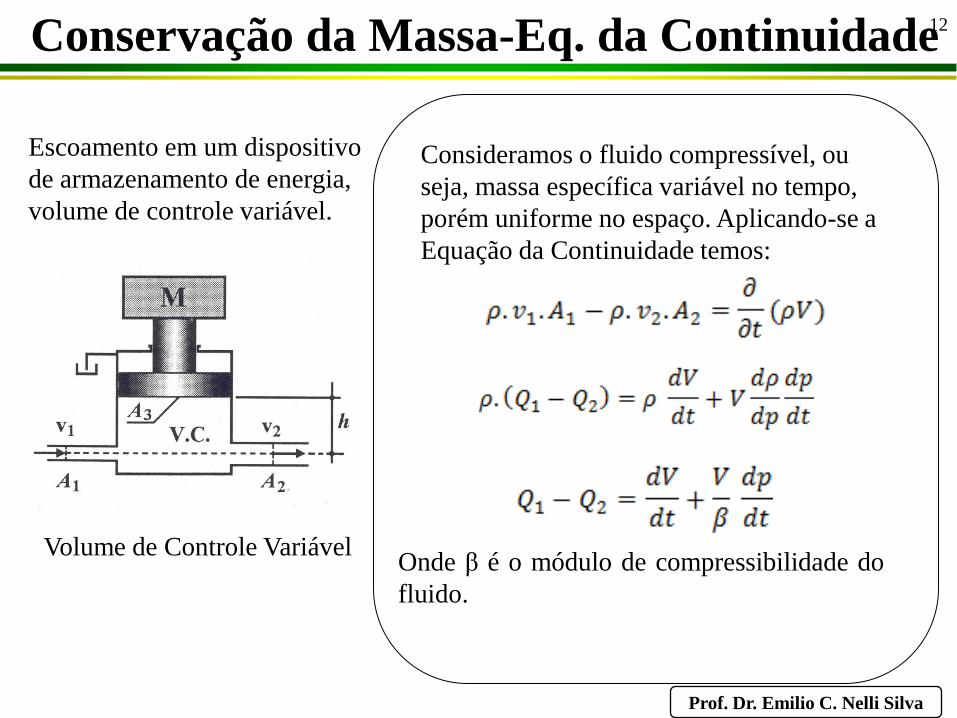
Volume de Controle Variável
Escoamento em um dispositivo
de armazenamento de energia,
volume de controle variável.
Consideramos o fluido compressível, ou
seja, massa específica variável no tempo,
porém uniforme no espaço. Aplicando-se a
Equação da Continuidade temos:
Onde β é o módulo de compressibilidade do
fluido.

Prof. Dr. Emilio C. Nelli Silva
13 Módulo de compressibilidade (βℓ)
Onde é o módulo de
compressibilidade isoentrópico
e é o módulo de
compressibilidade isotérmico
O módulo de compressibulidade é sempre positivo, dado
que é sempre negativo. Seu valor não é constante e
tende a aumentar de forma não-linear com a pressão e
diminuir com a temperatura.

Prof. Dr. Emilio C. Nelli Silva
14 Módulo de compressibilidade efetivo (βe)
Variação volumétrica de um
sistema em função da pressão
Prof. Dr. Emilio C. Nelli Silva
15 Conversão de Energia
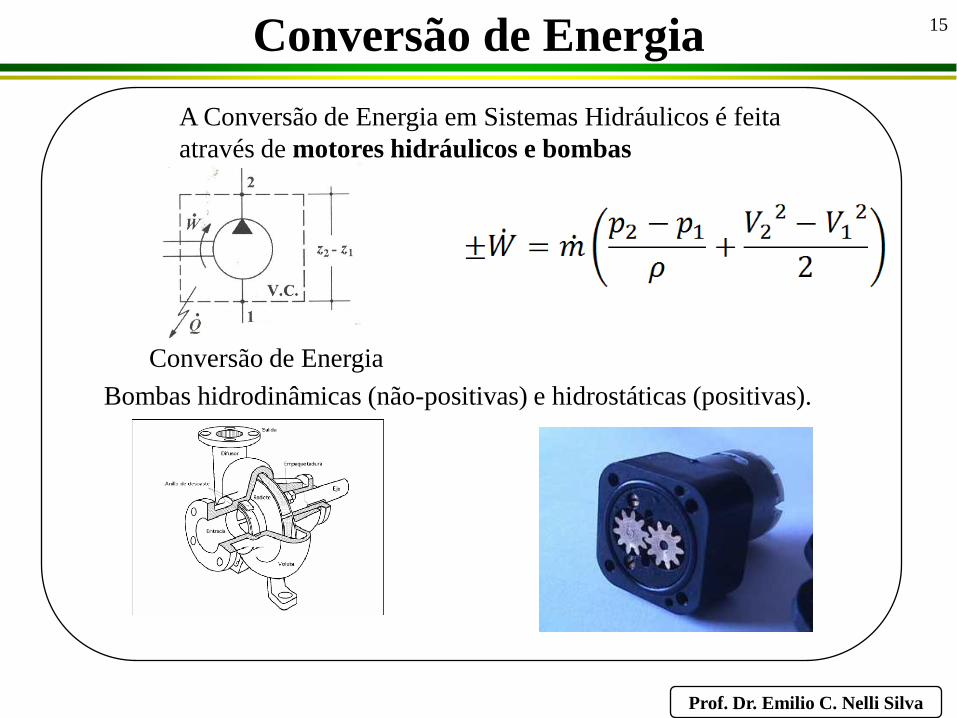
A Conversão de Energia em Sistemas Hidráulicos é feita
através de motores hidráulicos e bombas
Conversão de Energia
Bombas hidrodinâmicas (não-positivas) e hidrostáticas (positivas).
Prof. Dr. Emilio C. Nelli Silva
16 Curvas Características de Bombas
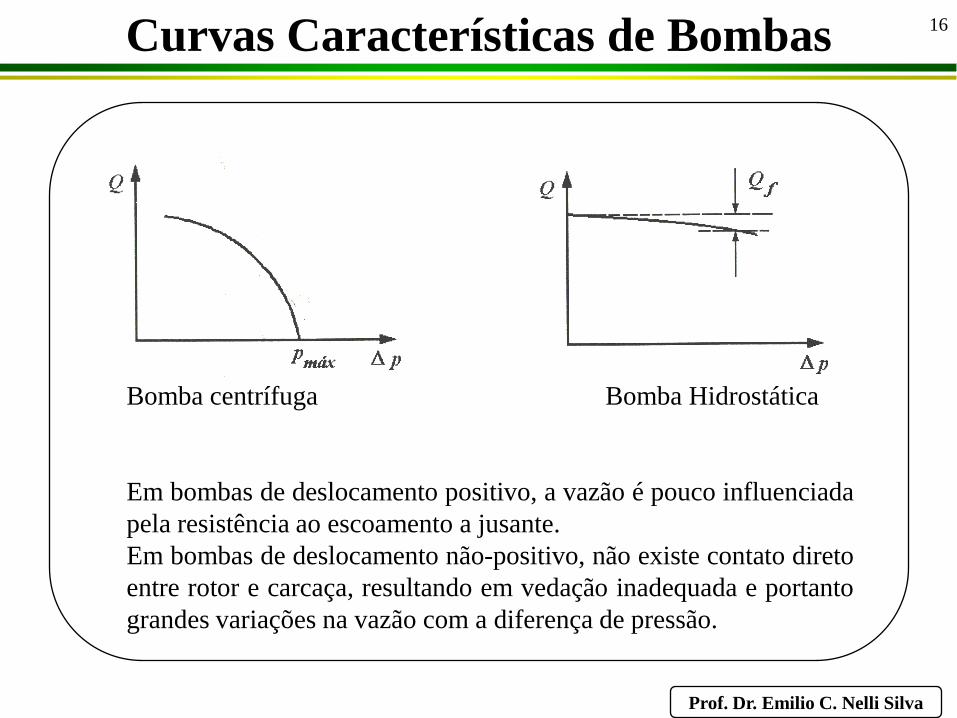
Bomba centrífuga Bomba Hidrostática
Em bombas de deslocamento positivo, a vazão é pouco influenciada
pela resistência ao escoamento a jusante.
Em bombas de deslocamento não-positivo, não existe contato direto
entre rotor e carcaça, resultando em vedação inadequada e portanto
grandes variações na vazão com a diferença de pressão.
Prof. Dr. Emilio C. Nelli Silva
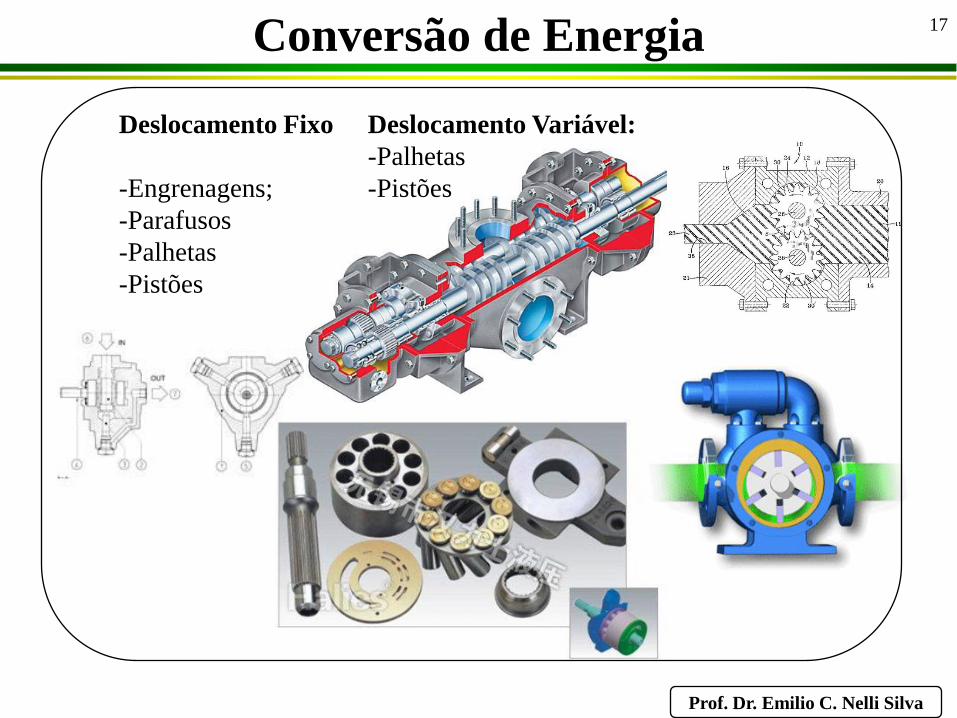
17 Conversão de Energia
Deslocamento Fixo
-Engrenagens;
-Parafusos
-Palhetas
-Pistões
Deslocamento Variável:
-Palhetas
-Pistões

Prof. Dr. Emilio C. Nelli Silva
18 Princípio de deslocamento por Engrenagens
Bomba e Motor de Engrenagens Externas
Utilizada em sistemas hidráulicos em geral. São robustas,
adaptáveis a grandes variações de viscosidade, insensíveis a
eventuais partículas sólidas presentes no fluido, fáceis de
montar, entre outras características
Distribuição de pressões
Prof. Dr. Emilio C. Nelli Silva
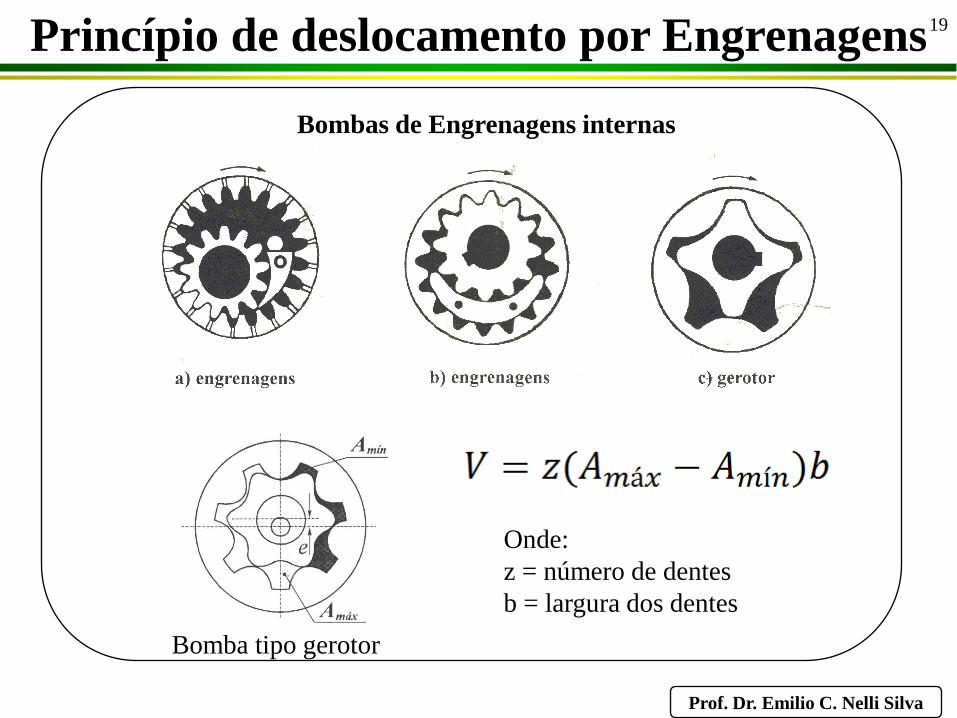
19 Princípio de deslocamento por Engrenagens
Bombas de Engrenagens internas
Bomba tipo gerotor
Onde:
z = número de dentes
b = largura dos dentes

Prof. Dr. Emilio C. Nelli Silva
20 Princípio de deslocamento por Engrenagens
Compensação de forças e vazamentos
Pressões elevadas,
pequena pulsação,
rendimento total
elevado e baixo nível
de ruído.

Prof. Dr. Emilio C. Nelli Silva
21 Princípio de deslocamento por Parafusos
Bomba de Parafusos

Prof. Dr. Emilio C. Nelli Silva
22 Princípio de deslocamento por Palhetas
Bomba de Palhetas

Prof. Dr. Emilio C. Nelli Silva
23 Princípio de deslocamento por Palhetas
Bomba de Palhetas
Bomba Compensada.
Bomba celular de palhetas
consiste em duas câmaras de
sucção e duas de descarga
diametralmente opostas
Bomba de palhetas duplas

Prof. Dr. Emilio C. Nelli Silva
24 Princípio de deslocamento por Palhetas
Bomba Celular de Palhetas com deslocamento variável
Com -e < x < +e

Prof. Dr. Emilio C. Nelli Silva
25 Princípio de deslocamento por Palhetas
Compensação de pressão em bomba variável
Forças de Reação na bomba

Prof. Dr. Emilio C. Nelli Silva
26 Princípio de deslocamento por Pistões
Máquinas de Pistões Radiais
Motor de pistões radiais em estrela, com acesso externo e
articulação interna (sistema Düsterloch)
Prof. Dr. Emilio C. Nelli Silva
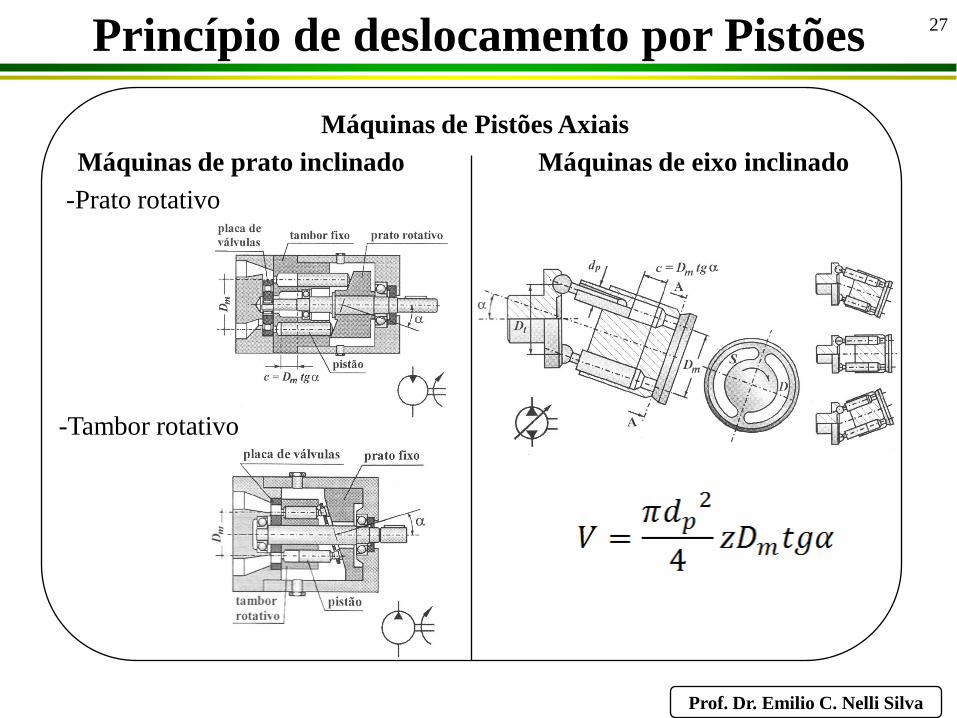
27 Princípio de deslocamento por Pistões
Máquinas de Pistões Axiais
Máquinas de prato inclinado Máquinas de eixo inclinado
-Tambor rotativo
-Prato rotativo

Prof. Dr. Emilio C. Nelli Silva
28 Princípio de deslocamento por Pistões
Máquinas de Pistões Radiais
Bomba de pistões radiais com compensação de pressão,
acesso interno de fluido e articulação externa dos pistões
Prof. Dr. Emilio C. Nelli Silva
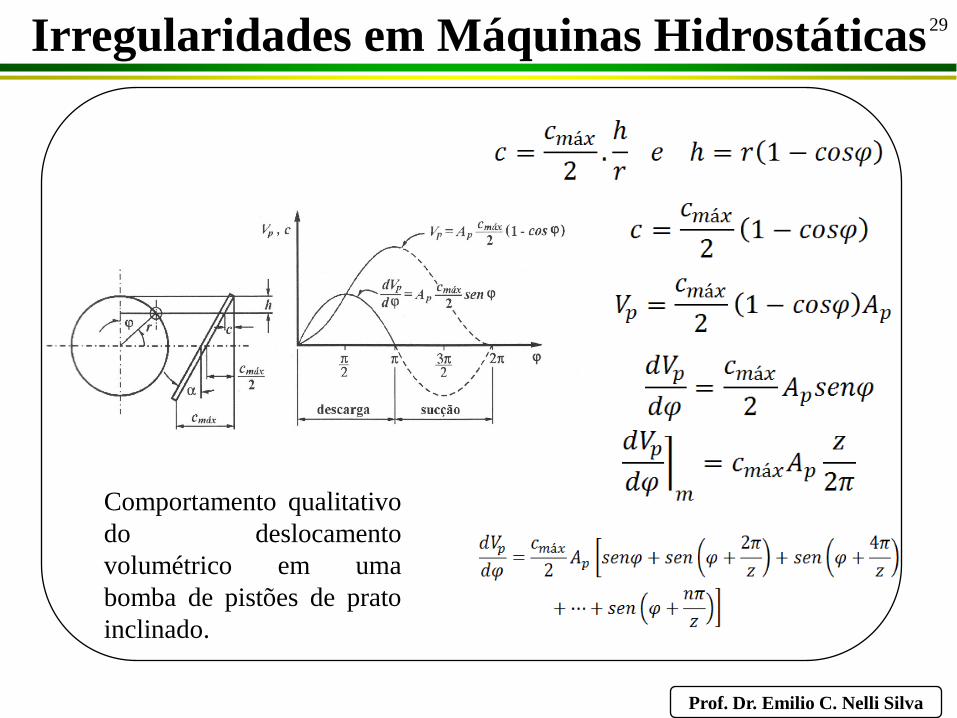
29 Irregularidades em Máquinas Hidrostáticas
Comportamento qualitativo
do deslocamento
volumétrico em uma
bomba de pistões de prato
inclinado.

Prof. Dr. Emilio C. Nelli Silva
30 Irregularidades em Máquinas Hidrostáticas
3 Pistões 4 Pistões
6 Pistões 7 Pistões

Prof. Dr. Emilio C. Nelli Silva
31 Irregularidades em Máquinas Hidrostáticas
Grau de irregularidade em função
do número de pistões e paridade







