Download - Apresentação siree 2013
MELHORIAS NO KIT EDUCACIONAL PÊNDULO INVERTIDO MONTADO
COM REE
1
Ricardo Teixeira da Silva Sergio Campello Oliveira Mércio Antônio Oliveira de Andrade
Introdução • Alunos de engenharia são mais propensos a
serem ativos do que os reflexivos (FELDER, 1988);
• Teorias devem ser explicadas por meio de demonstrações experimentais (JUNG, 2011);
• Sistemas de pêndulo invertido têm sido utilizados como o sistema de base experimental (JUNG, 2011).
2
Introdução • Construir recursos com REE para aulas práticas • Alternativa ao descarte dos resíduos • Maximização do tempo de uso dos componentes • Minimizar o custo de aquisição
3
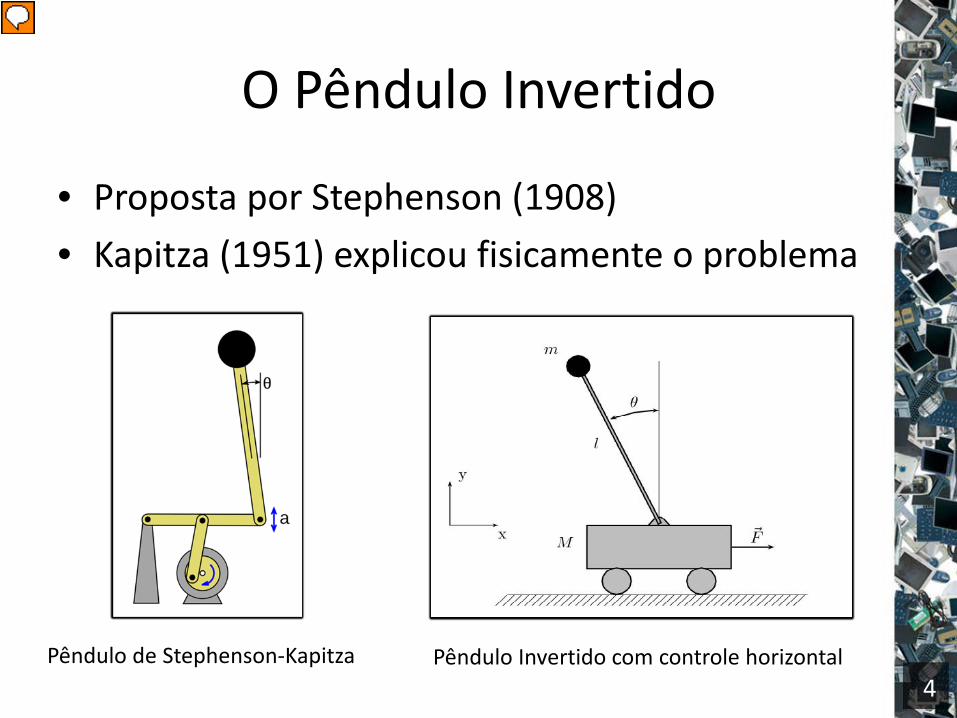
O Pêndulo Invertido
4 Pêndulo de Stephenson-Kapitza Pêndulo Invertido com controle horizontal
• Proposta por Stephenson (1908) • Kapitza (1951) explicou fisicamente o problema

O Pêndulo Invertido
• Contexto Educacional
GLIP2001 da Googol Technology IP01 da Quanser
5
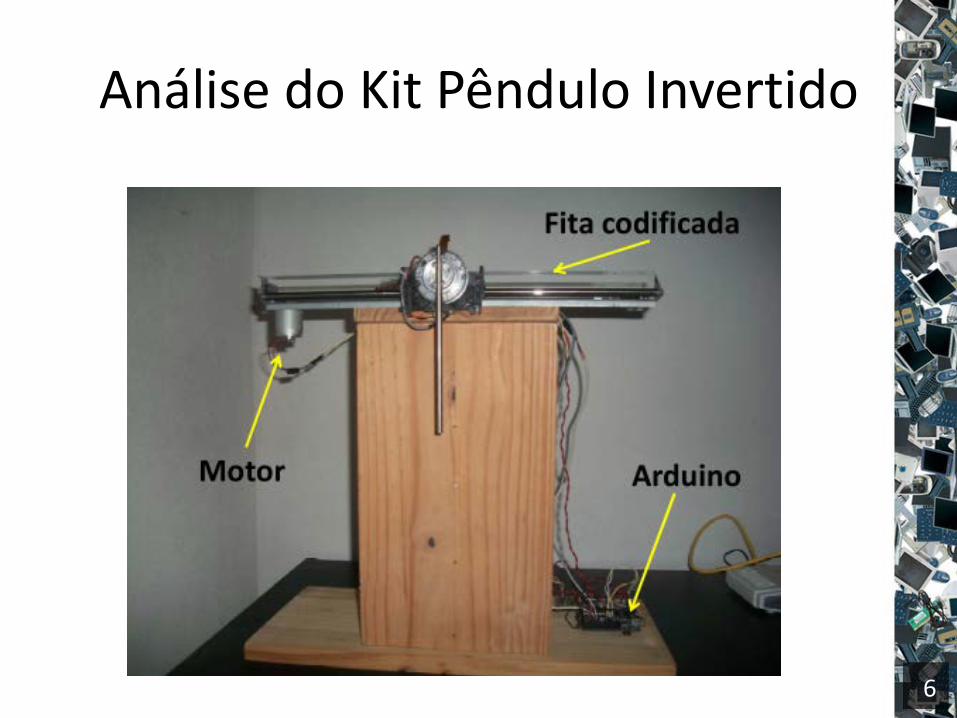
Análise do Kit Pêndulo Invertido
6
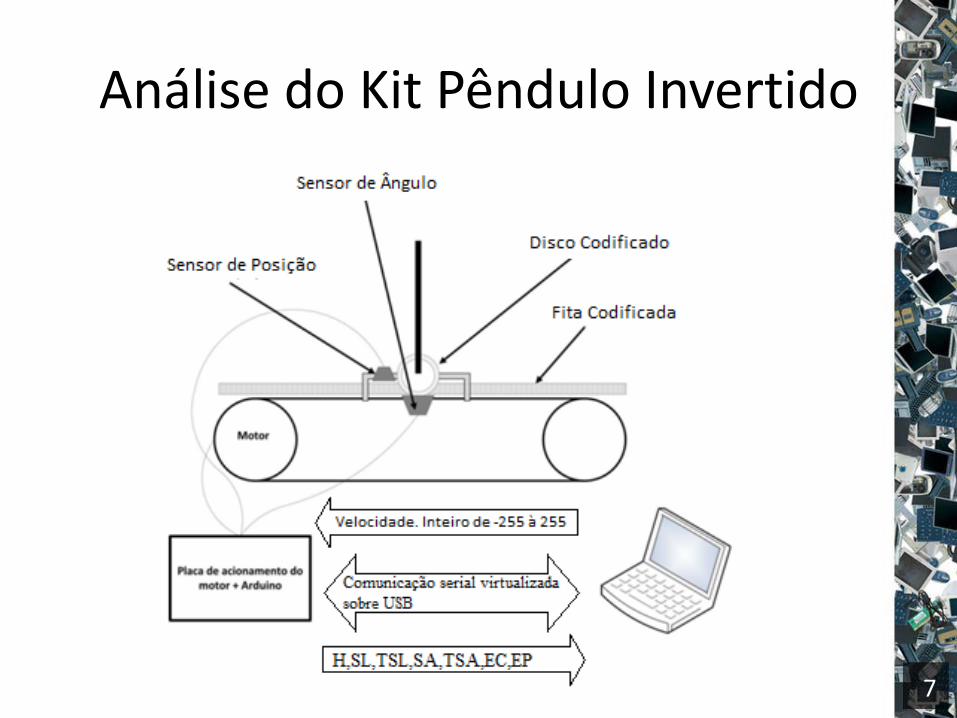
Análise do Kit Pêndulo Invertido
7
Análise do Kit Pêndulo Invertido
• Hardware • Montado a partir de Resíduos Eletroeletrônicos; • Utiliza a plataforma Arduino; • Problemas com colisões;
• A correia e o motor podem ser danificados.
8
Análise do Kit Pêndulo Invertido
• Software • Simplicidade ao comandar o carro; • Posição inicial determinada manualmente; • Não identifica o fim-de-curso; • Transmissão de dados continuamente; • Apenas comandos de posicionamento.
9
Adaptação e Implementação das Melhorias
• Sensores de fim-de-curso • Interface RS-232 • Inicialização do Sistema
O carro é deslocado para a esquerda Quando sensor é ativado, o carro para Inicia-se então a centralização do carro
• Requisição de Dados por Demanda Os dados dos sensores são enviados por meio de requisição Código de comando específico
• Códigos de Comandos e Eventos Comandos de movimentação do carro Comandos de controle Códigos de configuração Eventos e Exceções do Sistema
10
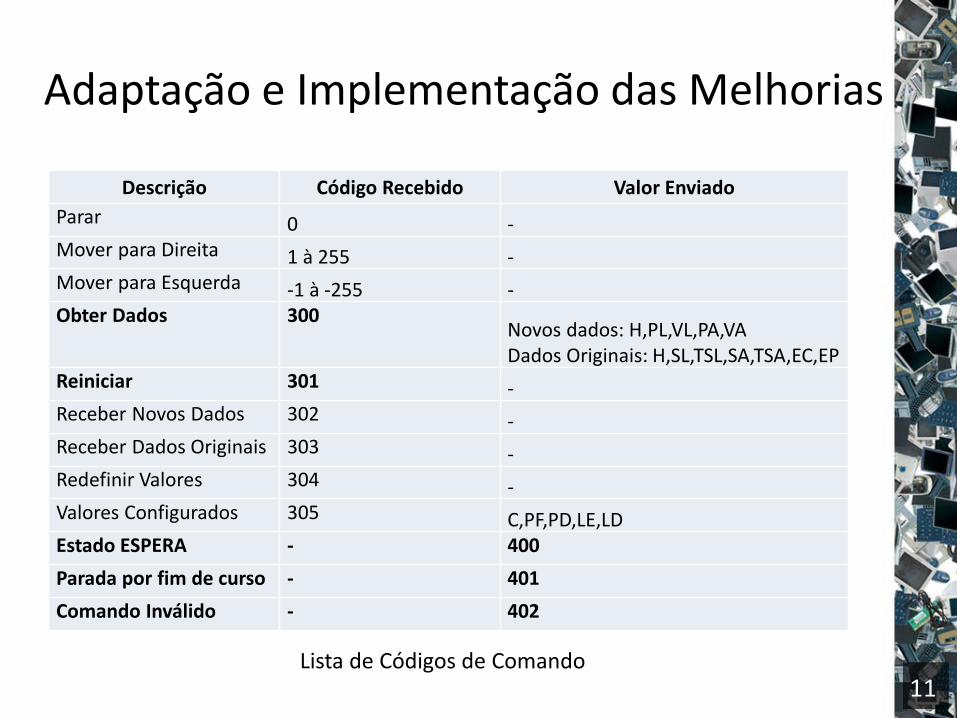
Adaptação e Implementação das Melhorias
Descrição Código Recebido Valor Enviado Parar 0 - Mover para Direita 1 à 255 - Mover para Esquerda -1 à -255 - Obter Dados 300
Novos dados: H,PL,VL,PA,VA Dados Originais: H,SL,TSL,SA,TSA,EC,EP
Reiniciar 301 - Receber Novos Dados 302 - Receber Dados Originais 303 - Redefinir Valores 304 - Valores Configurados 305 C,PF,PD,LE,LD Estado ESPERA - 400 Parada por fim de curso - 401 Comando Inválido - 402
11 Lista de Códigos de Comando
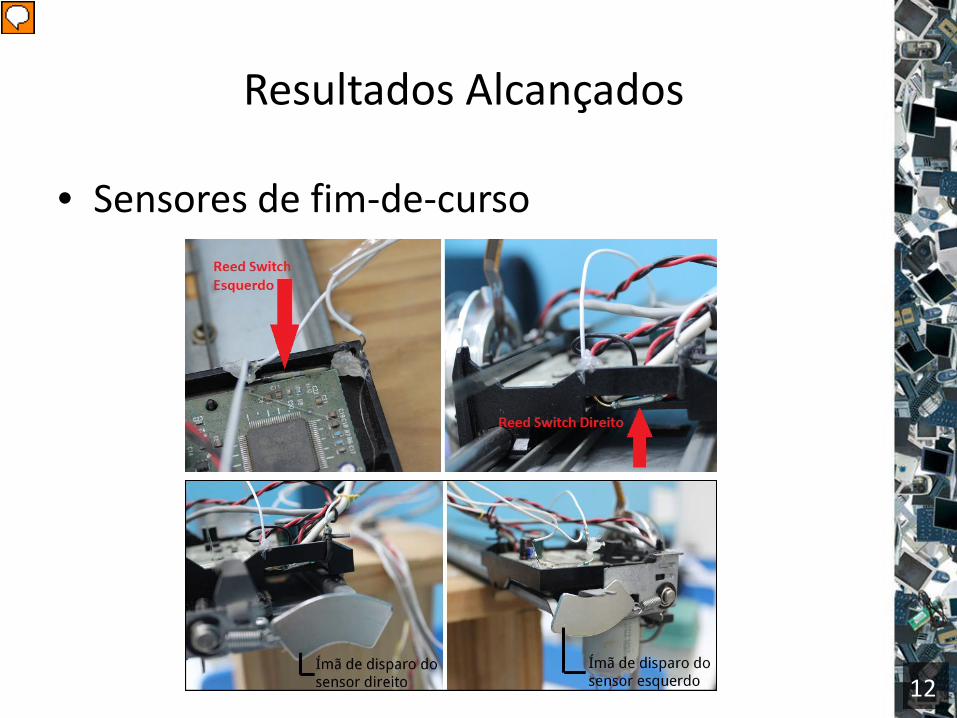
Resultados Alcançados
• Sensores de fim-de-curso
12
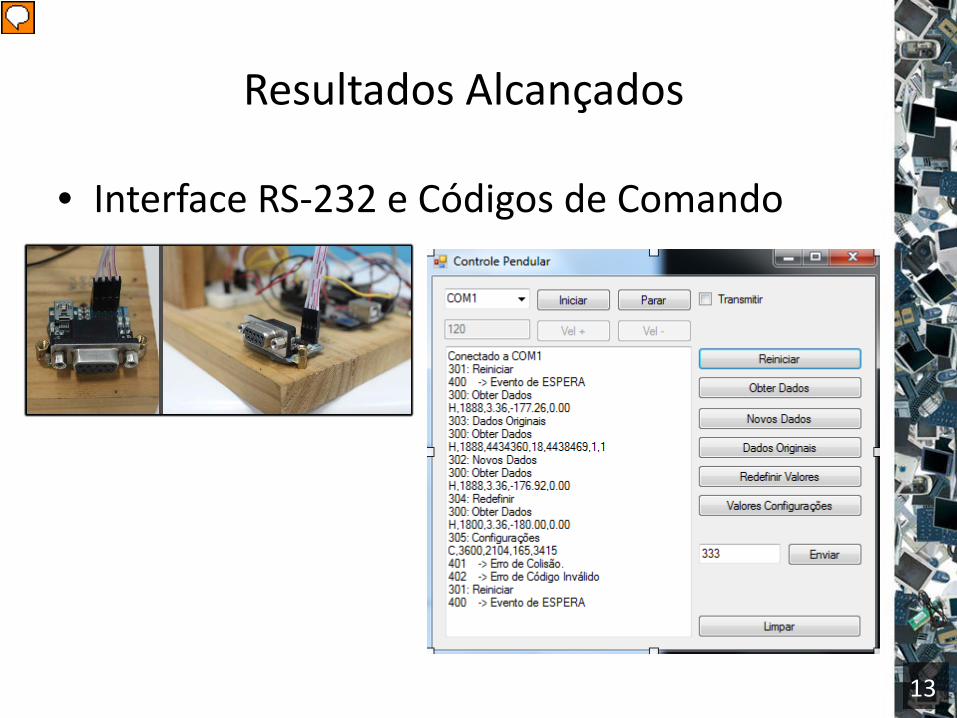
• Interface RS-232 e Códigos de Comando
13
Resultados Alcançados
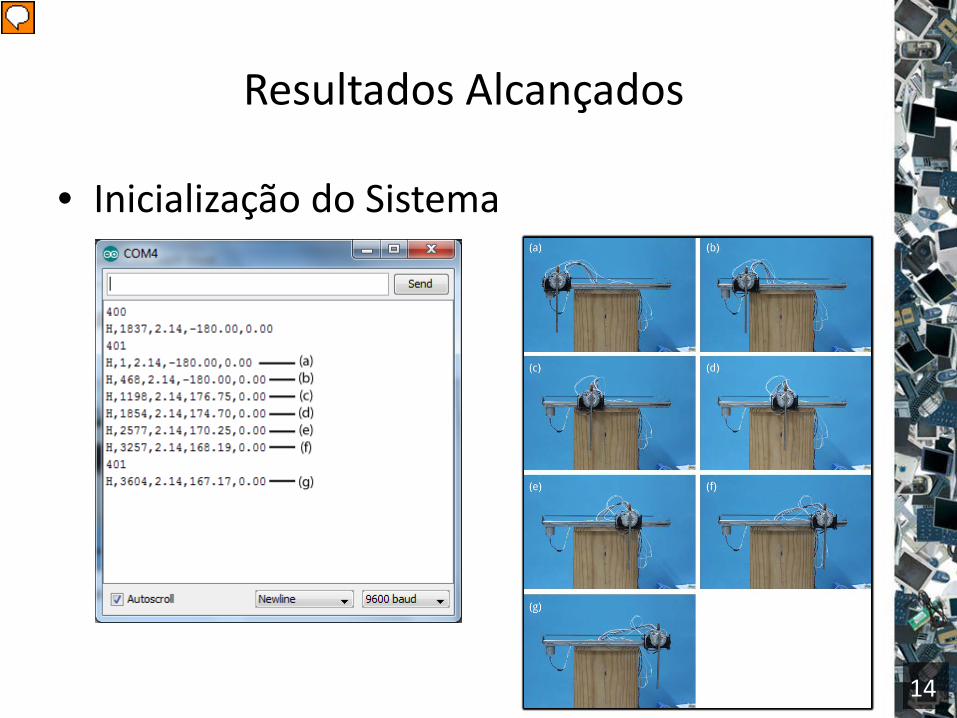
• Inicialização do Sistema
14
Resultados Alcançados
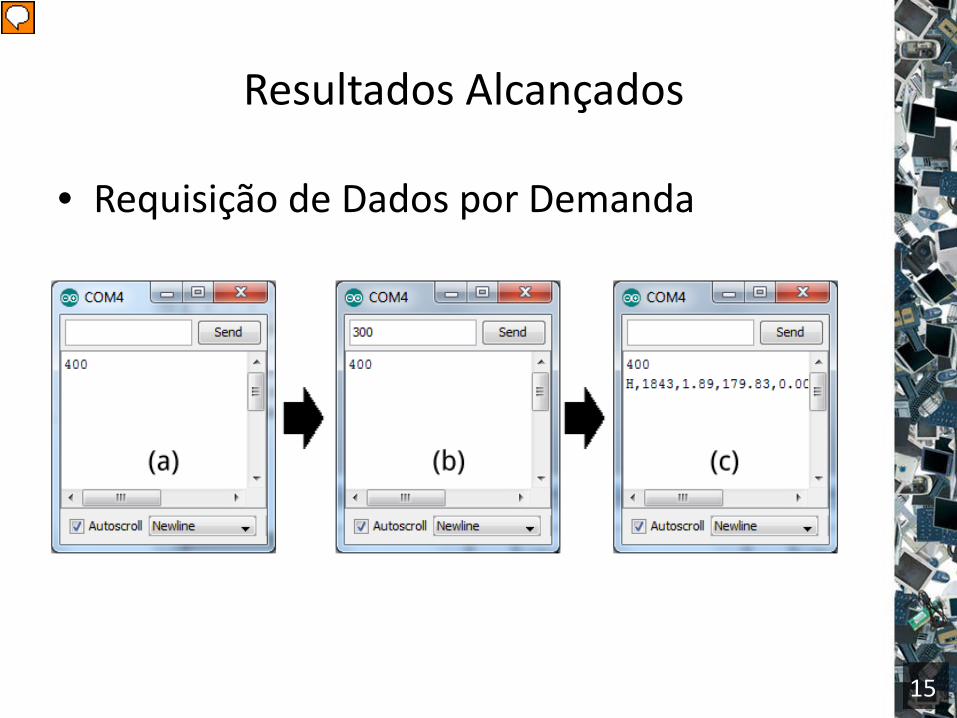
• Requisição de Dados por Demanda
15
Resultados Alcançados
Conclusão • O kit ficou mais resistente
• O motor é desligado nas colisões laterais. • Dados enviados por requisição
• Evita que o canal serial fique congestionado; • O cliente define quando quer os dados.
• Códigos de comando • Permite saber o momento de uma colisão para que a
devida providência possa ser tomada; • Tratamento de códigos inválidos ; • É possível reiniciar o sistema através de um código.
• Interface RS-232 • É possível fazer o controle através de dispositivos
com este padrão. 16
Conclusão
• É possível utilizar o Kit Pêndulo invertido como recurso didático em disciplinas do curso de Engenharia de Computação
• Recursos montados com REE podem equipar laboratórios de cursos de Engenharia de Computação
• Aproximar os alunos de problemas reais
17
Trabalhos Futuros
• Atrito do carro com o eixo pelo qual este deslizas
• Há a necessidade da fixação da estrutura de madeira
• Acúmulo do valor da variável que representa o disco codificado
18
19
MELHORIAS NO KIT EDUCACIONAL PÊNDULO INVERTIDO MONTADO
COM REE
Ricardo Teixeira da Silva Sergio Campello Oliveira Mércio Antônio Oliveira de Andrade







