
1
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
ANÁLISE DE COMPONENTES INDEPENDENTES
Tutorial
Nielsen Castelo Damasceno
1 INTRODUÇÃO
Em linhas gerais, podemos dizer que a motivação do uso de Análise de
Componentes Independentes (ACI) ou do inglês: Independent Componente Analysis
(ICA) é o BSS (Blind Source Separation ou Separação Cega de Fontes)
(HYVÄRINEN, OJA, 1999). Todavia, vamos utilizar ACI e ICA, doravante, para
representar a mesma entidade. Sobretudo, um dos problemas típicos investigados
pela técnica de separação cega de fontes é motivado por um problema chamado
“cocktail party” ou separação de sinais de áudio.
Considere duas pessoas conversando em uma sala fechada utilizando
sensores (microfones) para capturar suas vozes. Esta situação é representada na
Figura 1. O problema consiste em separar os sinais captados pelos microfones
sabendo que os sinais estão agora correlacionados. A particularidade da separação
cega de fontes perante as outras técnicas de filtragens é que, nesse caso, não
precisamos conhecer precisamente os sinais de fontes (HYVÄRINEN, 1999a).
Figura 1: O problema do cocktail-party.
O problema do cocktail-party pode ser representado da seguinte forma: x =
2
1
x
x, A=
2221
1211
aa
aae s =
2
1
s
s, ou seja,

2
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
=x
=
2
1
2221
1211
2
1
s
s
aa
aa
x
x (1)
ou pode-se reescrever a Equação 1 utilizando a notação matricial, que tornar-se-á:
Asx = (2)
Denota-se x pelo vetor aleatório cujos elementos representam as misturas
ou sensores, a matriz A com elementos ija representam a atenuação ou
amplificação sobre o vetor aleatório s que representam o sinal de fontes 1s e 2s .
Por enquanto, deixemos de lado qualquer momento de atraso e outros
fatores extras a partir de nosso modelo simplificado de mistura. Como ilustração,
considere os sinais representados na Figura 2 e 3.
Figura 2: Dois sinais do discurso original.
Os sinais do discurso original é semelhante aos sinais representado na
Figura 2 e as misturas poderiam se parecer com os sinais na Figura 3. Nos gráficos
acima as coordenadas abscissas representam o número de amostra do sinal em
cada período de tempo e a ordenada representa a amplitude do sinal. O problema
consiste em recuperar os dados na Figura 2 utilizando apenas os dados da Figura 3.
0 2 4 6 8 10 12 14 16 18 20-0.02
-0.01
0
0.01
0.02
Sin
al d
e fo
nte
1 (A
mpl
itude
)
Tempo (ms)
0 2 4 6 8 10 12 14 16 18 20-0.04
-0.02
0
0.02
Sin
al d
e fo
nte
2 (A
mpl
itude
)
Tempo (ms)

3
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
Figura 3: Sinais dos discursos misturados.
Na verdade, se soubéssemos os parâmetros ��� poderíamos resolver o
sistema na Equação 1 pelos métodos clássicos. O ponto, porém, é que não
sabemos o valor de ���, de forma que o problema se torna consideravelmente difícil.
Uma abordagem para resolver este problema seria usar alguma informação
estatística sobre as propriedades dos sinais ����� para estimar a todos. Na verdade,
e talvez surpreendentemente, verifica-se que ela seja suficiente para presumir que
����� e ���� a cada instante de tempo � são estatisticamente independentes. A
técnica recentemente desenvolvida conhecida como ICA pode ser usado para
estimar os valores de ��� baseado nas informações de sua independência, o que
permite recuperar ou estimar o sinal original ����� e ���� a partir de suas misturas
���� e ���.
A Figura 4 representa os sinais de fontes estimados por ICA usando
abordagem PCA (KUN; CHAN, 2006).
Na Figura 5 ilustra um diagrama esquemático do problema, onde um conjunto
de sinais de fontes são submetidos à ação de um sistema misturador, cujas saídas
correspondem a misturas de tais fontes. Devemos de alguma forma, projetar um
sistema separador que seja capaz de estimar as fontes, ou seja, inverter a ação do
0 2 4 6 8 10 12 14 16 18 20-10
-5
0
5x 10
-3
Mis
tura
1 (
Am
plitu
de)
Tempo (ms)
0 2 4 6 8 10 12 14 16 18 20-0.02
-0.01
0
0.01M
istu
ra 2
(A
mpl
itude
)
Tempo (ms)

4
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
sistema misturador. Este problema é dito cego em razão da falta de informação que
temos sobre as misturas e as fontes.
Figura 4: Sinais de fonte estimados a partir das misturas.
Figura 5: Diagrama esquemático do problema de separação cega linear.
Podemos também representar de forma simples o processo de misturas das
fontes pela seguinte expressão:
x ( ) Fn = ( s ( )n , s ( )1−n ,L , s ( )Ln − , ( )nr ) (3)
onde o ( )⋅F corresponde a ação do sistema misturador, L é associado às memórias
(amostras atrasadas) no sistema e o vetor r representa o ruído presente nas fontes.
Um sistema misturador é dito linear se o mapeamento ( )⋅F atende o principio da
superposição, caso contrário é dito não linear.
0 2 4 6 8 10 12 14 16 18 20-2
-1
0
1
2
Sin
al e
stim
ado
1 (A
mpl
itude
)
Tempo (ms)
0 2 4 6 8 10 12 14 16 18 20-4
-2
0
2
Sin
al e
stim
ado
2 (A
mpl
itude
)
Tempo (ms)
5
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
Nas situações em que o sistema misturador depende das amostras passadas
(L > 0) é dito que o sistema misturador é convolutivo (com memória). Entretanto, há
situações em que (L = 0) o sistema é chamado de instantâneo (COMON, 1994).
Em outras situações onde o número de sensores podem ser maiores que o
número de sinais de fontes, tem-se o caso sobre determinado. Analogamente,
temos o caso subdeterminado quando o número de sensores é menor que os sinais
de fontes.
2 RELAÇÃO ENTRE ICA E PCA
O ICA procura transformar a mistura de sinais num número de componentes
independentes (ICs), sem reduzir as dimensões da mistura. Mas, quando é
necessário a redução da informação, então efetua-se um pré-processamento da
mistura com PCA (Principal Componentes Analysis).
A principal diferença entre o ICA e o PCA é que o PCA usa, unicamente, a
estatística de 2ª ordem (média e variância), enquanto o ICA utiliza a estatística de
ordens superiores (kurtosis). Por isso, o PCA é usado para variáveis Gaussianas
que são de estatística de 2ª ordem. Mas, como a maioria dos sinais são não-
gassianos e com ordens estatísticas elevadas, logo o ICA é uma melhor opção.
3 INDEPENDÊNCIA E NÃO-CORRELAÇÃO
ICA consiste em recuperar os sinais originais a partir de uma mistura. Um
princípio bastante utilizado para determinar ou inferir nas misturas tem sido a
independência estatística, ou seja, o valor de qualquer um dos componentes não
fornece nenhuma informação sobre os valores dos outros componentes.
Normalmente, uma distribuição de probabilidade é caracterizada em termos
de sua função de densidade ao invés de cdf (função de distribuição cumulativa ou
do inglês: cumulative distribution function). Formalmente, a função de densidade de
probabilidade é obtida derivando cdf. ICA está intimamente ligado à independência
estatística. Matematicamente, a independência estatística é definida em termos de
densidade de probabilidade (PAPOULIS, 1991), por exemplo. As variáveis
aleatórias x e y são ditas independentes, se e somente se,
� ,��, �� � � ������� (4)
6
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
Em outras palavras, a densidade conjunta � ,��, �� de x e y devem fatorar no
produto das suas densidades marginais � �� e �����. Equivalente à independência,
esta pode ser definida pela substituição das funções de densidade de probabilidade
na Equação 4 pelas respectivas funções de distribuição cumulativa, que também
deve ser fatoráveis.
Duas variáveis, x e y, são não-correlacionadas se a sua covariância for zero:
0}{}{}{),cov( =−= yExExyEyx (5)
Assume-se que a média é zero para todas as variáveis aleatórias. Logo a
covariância é igual à correlação:
0}{),(),cov( === xyEyxcorryx (6)
Se as variáveis, x e y, são independentes, então são não-correlacionadas, ou
seja,
}{}{}{ yExExyE = , (7)
x e y são independentes. Substitui-se (7) em (5) obtém-se:
0}{}{}{}{),cov( =−= yExEyExEyx (8)
Porém, se duas variáveis aleatórias forem não-correlacionadas, não implica
que sejam independentes. Por isso, a independência é mais forte que a não-
correlação. Daí que os sinais a separar duma mistura tenham que ser mutuamente
independentes.
4 MODELO GENERATIVO
O modelo generativo descreve como os sinais misturados são produzidos e
trata-se da base do ICA. Este modelo afirma que os sinais misturados são o produto
da combinação linear dos sinais originais (componentes independentes). Para a
simplificação do método, não se considera a presença de ruído, diferente de
situações reais ou práticas.

7
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
4.1 MATRIZ DE MISTURA, VARIÁVEIS OBSERVÁVEIS E VARIÁVEIS LATENTES
Matematicamente, o modelo generativo foi apresentado na seção 1. A
variável s é um vetor composto por todos os sinais originais (componentes
independentes). Note-se que os sinais originais, só por si, são também vetores.
Assim, nesta notação, as componentes independentes são os elementos de um
único vector de sinais originais, s. Neste vetor encontram-se então as variáveis
latentes, uma vez que, não são diretamente observáveis. Ou seja, estão escondidas
ou latentes, no vector x.
As técnicas usadas no ICA pretendem usar a matriz inversa de A, de forma a
estimar as componentes independentes, s, da seguinte forma:
xAs 1−= (9)
Em situações que a matriz A é conhecida basta utilizar a Equação 9 para
estimar s. Quando a matriz A não é conhecida devemos inicialmente assumir que, a
mistura, x, estão relacionados com os sinais latentes, s, através de uma
transformação linear (rotação e scaling). Logo, alguma transformação inversa
(rotação/scaling) pode ser encontrada de forma a se obter os sinais originais.
Note-se que as transformações podem também ser não-lineares. Desta
forma, a separação das componentes independentes complica-se. A Equação 10 e
11 descrevem, sucintamente, que existe uma função de mistura, F, também
desconhecida:
)(xFx = (10)
= ∑
=
n
jjijui saFx
1
, (11)
onde, ni ,,1L= e nj ,,1L= .

8
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
5 RESTRIÇÕES AO MODELO
Para estimar a matriz de mistura A é preciso admitir algumas restrições:
1. As variáveis latentes, s, têm que ser mutuamente independentes.
2. As componentes independentes tem que ser distribuições não-gaussianas.
Isto deve-se ao fato do ICA permitir estimar ICs com ordem de estatística
elevada. Para sinais gaussianos, a ordem de estatística elevada é igual a
zero. Portanto, ICA não requer que seja conhecida a distribuição das
variáveis, basta que elas não sejam gaussianas. Pode-se notar (Figura 6)
que não é possível estimar a matriz de mistura, A, porque a distribuição de
probabilidades não possui informação sobre as direções das colunas desta
matriz. Assim, se a mistura possuir sinais originais não-gaussianos e sinais
originais gaussianos, então as componentes gaussianas não são separadas
pelo ICA e surgem misturadas.
Figura 6: Distribuição conjunta de duas variáveis aleatórias gaussianas.
3. A matriz de mistura A deve ser quadrada. Ou seja, o número de ICs deve ser
igual ao número de variáveis observadas (ou misturas). Assim, após o cálculo
da matriz A, pode-se usar a sua inversa, matriz B, para obter as ICs:
BxsAsAxAAsx =⇔=⇔= −− 11 (12)
Se a matriz A não for quadrada, então não terá inversa.
9
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
Observe que, se aplicarmos o PCA para reduzir a dimensão de x igual a
dimensão de s, o problema das matrizes de mistura singulares fica resolvido.
6 AMBIGUIDADES
Em ICA, a única informação disponível é relativa às misturas, x. Nada se
sabe sobre a matriz de mistura, A, e as variáveis latentes, s. Por essa razão,
existem determinadas ambiguidades nas componentes estimadas.
1. Escalamento: É impossível determinar as variâncias das ICs. Em
consequência, também não é possível calcular as energias ou as amplitudes
dos sinais. Esta ambiguidade verifica-se no problema do ‘cocktail party’,
porque não se sabe a localização das pessoas, nem dos microfones e nem
informação sobre as vozes. Como a amplitude do sinal não é conhecida,
então é usual fixar as amplitudes. Com isso, a variância dos sinais originais é
igual a um. No entanto, por inúmeras razões, é impossível determinar o sinal
das ICs. Por isso, os sinais originais quando separados, podem surgir
invertidos. Assim, se uma IC for multiplicada por -1, o modelo não é afetado.
Esta ambiguidade, felizmente, não apresenta grande problema na maioria
dos casos.
2. Permutação: É impossível determinar a ordem das ICs. Para saber a ordem
das componentes independentes, é necessário alguma informação sobre a
matriz de mistura. No entanto, por definição, esta matriz é desconhecida.
Assim sendo, pode-se alterar livremente a ordem dos termos na Equação 12
e definir qualquer uma das ICs como sendo a primeira. Uma matriz de
permutação P e a sua inversa podem ser substituídas no modelo de modo a
obter a Equação 13. Assim, os elementos Ps são as ICs originais s j numa
ordem diferente e a matriz AP-1 é uma nova matriz de mistura.
PsAPx 1−= (13)
Observe que uma matriz de permutação, P, é uma matriz quadrada
constituída unicamente por 0’s e 1’s e que possui em cada linha e em cada coluna
apenas um elemento igual a 1 (sendo os restantes elementos iguais a zero). Esta
ambiguidade não constitui um grande problema.

10
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
=010
100
001
P
7 PRÉ-PROCESSAMENTO
A correlação é considerada uma medida “fraca”. Todavia, pode-se verificar
que este procedimento permite a determinação de uma transformação linear sobre a
mistura. À luz deste paradigma, conclui-se que a PCA considera apenas estatística
de segunda ordem, diferentemente de ICA, que considera estatística de ordem
superior, discutido anteriormente. Assim, utiliza-se a PCA como um pré-
processamento ao ICA que chamamos de branqueamento (POBLADOR; MORENO
et. al., 2004). Este método será detalhado na próxima seção.
Para ilustrar a tentativa de recuperar as fontes usando branqueamento,
representamos duas fontes independentes, �� e �, uniformemente distribuídas em
um quadrado (Figura 7). Usou-se uma matriz quadrada 2x2 para gerar as misturas
dadas pela Equação 2. O resultado desta mistura é apresentado na Figura 8 e por
fim suas estimativas obtidas pelo processo de branqueamento são ilustradas na
Figura 9.
Considerando o efeito do sistema misturador linear, verifica-se a dificuldade
da recuperação das fontes (Figura 9) usando estatística de segunda ordem.
Claramente, o método consegue recuperar as escalas das fontes, mas é incapaz de
recuperar a rotação, pois existe uma indeterminação referente a uma matriz
ortogonal cujo efeito é a rotação dos dados (HYVÄRINEN; OJA, 1999).
Intuitivamente, percebe-se que a utilização dessa ideia para um pré-
processamento no algoritmo ICA dito anteriormente é obrigatório na utilização do
branqueamento para a separação das fontes, visto que em distribuições gaussianas
conhecemos apenas duas características, a média e variância. Percebe-se com
este resultado a ineficácia da estatística de segunda ordem, no que tange a
impossibilidade de recuperar fontes gaussianas e este resultado foi provado por
Comon (1994).

11
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
Figura 7: Distribuição conjunta é uniforme em um quadrado.
Figura 8: Distribuição das misturas dos componentes.
Figura 9: Distribuições conjuntas das estimativas usando PCA.

12
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
Em primeiro lugar, para se determinar as componentes independentes,
remove-se a média dos valores das variáveis, num processo chamado centering ou
centralização das variáveis.
Em seguida, as variáveis aleatórias são transformadas em variáveis não-
correlacionadas através do processo chamado whitening ou branqueamento.
Ambos os processos podem ser usados pelo PCA, uma vez que, este método
descorrelaciona as variáveis e fornece, ainda, informação sobre a variância das
variáveis descorrelacionadas na forma de vetores próprios.
7.1 CENTRALIZAÇÃO (CENTERING)
Admite-se que as ICs e as variáveis observadas possuem médias iguais a
zero de forma a simplificar o modelo. Ou seja, subtrai-se a média das variáveis
observadas a todos os valores do vector x’ (vector original das variáveis
observadas):
}{' xExx −= (14)
As ICs vão também possuir média igual a zero pois:
}{}{ '1 xEAsE −= (15)
Após este processo a matriz A permanece igual, logo a estimativa da matriz
A não é afetada. Após esta estimativa da matriz de mistura e das ICs a partir dos
dados com média zero, adiciona-se o fator }{ '1 xEA− às ICs de forma a compensar o
processo de centralização.
7.2 BRANQUEAMENTO (WHITERING)
Se duas variáveis aleatórias são descorrelacionadas e têm variância igual a 1
então elas são chamadas de brancas (POBLADOR; MORENO et. al., 2004), ou
melhor, a matriz de covariância é igual à identidade conforme a equação a seguir:
{ }tzzE = I (16)
Podemos obter variáveis brancas a partir de uma transformação linear qual
seja:
z = Vx (17)

13
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
O branqueamento de x pode ser feito pela matriz V tal que,
� � ����/����, (18)
onde, � é uma matriz ortogonal cujas colunas são os autovetores de ������ e � é
uma matriz diagonal com os autovalores correspondentes:
������ � ���� (19)
Assim, o branqueamento transforma a matriz � em uma nova matriz ��, de
forma que agora temos:
� � ��� � � � (20)
Vamos agora fazer uma transformação ortogonal em � fazendo:
! � "� (21)
Em razão à ortogonalidade de ", ! também é branco como mostra a seguinte
expressão:
��!!�� � ��"���"�� � "I"� � I (22)
Portanto, mostrou-se que o branqueamento é um pré-processamento para o
ICA, pois ele não é suficiente para que se estimem as fontes independentes, e
fornecendo apenas uma transformação ortogonal em �. O que precisamos agora é
de uma estratégia elaborada para rotacionar os dados das misturas.
8 MÉTODO DE ESTIMAÇÃO ICA
As componentes independentes são determinadas através da aplicação de
uma transformação na matriz de mistura ortogonal, após o processo de whitening.
Uma vez que, as misturas são uma combinação linear das ICs, então é possível
reconstrui-las a partir duma transformação linear inversa sobre as variáveis de x.
Assim sendo, a Equação 23 mostra a transformação, a partir da qual, se obtém as
ICs:
xbic tii = (23)

14
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
O elemento $% da Equação 23 é uma componente independente e trata-se
duma estimativa do sinal original. O elemento b é o vetor apropriado que reconstrói
cada componente independente.
Existem inúmeras e diferentes abordagens para estimar b que, se baseiam
numa função objetivo relacionada com a independência das variáveis. Essa função
é maximizada ou minimizada através de algoritmos de optimização.
As várias abordagens diferem entre si, na definição da função objetivo que é
optimizada e, no método de optimização a usar. Alguns métodos são: Maximização
da não-gaussianidade; estimativa da máxima probabilidade; minimização da
Informação mútua; métodos tensoriais, método usando PCA, entre outros.
8.1 ALGORITMO ICA UTILIZANDO PCA
Um dos algoritmos que foi desenvolvido recentemente provou ser superior a
algumas abordagens ICA (KUN, CHAN, 2006). Conhecido como P-ICA, esta
abordagem basicamente resolve o problema de BSS linear aplicando PCA e
posteriormente usa uma transformação para recuperar os sinais de fontes.
Considerando os dados observados representados por x, PCA e ICA visam à
transformação linear dado pela Equação 2. No entanto, elas exploram os dados de
formas diferentes. O PCA visa encontrar uma transformação ortogonal em W que dá
resultados não correlacionados (vale lembrar que se mostrou anteriormente que
PCA considera apenas estatística de segunda ordem). Porém, o PCA utiliza a
distribuição conjunta gaussiana para ajustar os dados e encontrar uma
transformação ortogonal que faz a distribuição conjunta gaussiana fatorável
independente da verdadeira distribuição dos dados. Neste contexto, a ICA tenta
encontrar uma transformação linear que faz a verdadeira distribuição conjunta dos
dados transformados fatorável, de modo que as saídas são mutuamente
independentes.
Grande parte dos algoritmos ICA requerem o branqueamento das misturas
como descrito na seção 7.2, podemos citar como exemplo o FastICA (HYVÄRIEN,
1999c) e o JADE (CARDOSO, 1999). Discorremos na mesma seção que o processo
de branqueamento pode ser feito a partir de PCA, bem como usar decomposição de
autovalores e autovetores.

15
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
Em linhas gerais, Kun e Chan (2006) mostrou e provou que as componentes
independentes têm diferentes kurtosis, no qual se tem o seguinte teorema: Dado s,
&, e � vetores aleatórios tal que & � '�, onde W é uma matriz ortogonal e � �
‖&‖&. Suponha que s tem média zero e que as componentes independentes têm
diferentes kurtosis. Então, a matriz ortogonal " que é dado pela componente
principal de � (� não é centralizado) realiza ICA em &.
O método P-ICA se resume nos seguintes procedimentos que consiste em
quatros etapas:
1. Branqueamento de x usando a Equação 17;
2. Faça uma transformação � � ‖&‖&;
3. Encontre " usando PCA em �;
4. Depois de encontrar a matriz ortogonal " finalmente a matriz de separação
pode ser estimada usando a expressão ' � "�.
8.2 FASTICA POR KURTOSIS E NEGENTROPIA
Para encontrar o máximo da não-gaussianidade, é necessário usar o método
do gradiente. No entanto, a convergência para o máximo local é lento. Assim, para
tornar esse processo mais rápido, os algoritmos iterativos de pontos-fixos (FastICA)
tornaram-se uma boa alternativa. A convergência rápida deve-se ao fato de se tratar
de algoritmos cúbicos.
Como a não-gaussianidade pode ser medida através da kurtosis ou da
negentropia, existe então o FastICA que usa a kurtosis e o FastICA por base na
negentropia. No entanto, é importante salientar que existem versões mais
sofisticadas deste algoritmo.
8.2.1 UTILIZANDO KURTOSIS
No FastICA que usa a kurtosis, o ponto estável (máximo) deve apontar na
direção de W, ou seja, o gradiente deve ser igual a W multiplicado por um escalar
constante. A equação do gradiente da kurtosis com W é a seguinte:
[ ]WWxWxEW t 23 ||||3})({ −=
16
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
Sendo um processo iterativo, um novo valor de W é dado por:
3})({[ 3 −= xWxEW t
No final, o vector W fornece uma das componentes independentes como uma
combinação (Equação 24). Mas para tal acontecer, é necessário que os valores old
and new de W apontem na mesma direção.
xWic t= (24)
8.2.2 UTILIZANDO NEGENTROPIA
O algoritmo FastICA foi primeiramente publicado por Hyvärinen (1999b). O
objetivo do algoritmo é encontrar uma matriz W e ajustar as suas linhas denotadas
por )��, de modo que !� � )�
�� resulte numa estimativa das fontes, lembrando que a
maximização da Negentropia é baseada nos momentos polinomiais (HYVÄRINEN,
1999a). Utilizando a aproximação da Negentropia e considerando que os dados
foram branqueados, a maximização da Negentropia se resume em encontrar uma
matriz W que é descrito pelo seguinte problema de otimização (HYVÄRINEN, 2000):
)*� � �+,-�./
0��1����� 2 ��1�3��4
Fazendo uma restrição na etapa de adaptação, temos que restringir a
potência de cada uma das estimativas assumindo que:
����� � ��)���� � 1
O máximo da função )*� é quando encontramos certo valor ótimo de ��1�����
em razão ao ��1034� ser constante. Assim, considerando o primeiro termo da
equação, o problema de maximizar e otimizar são equivalentes. Podemos mostrar
que o problema de otimização é resolvido usando o método de Lagrange, quando a
seguinte condição é satisfatória (HYVÄRINEN, 1999):
���16�)����� 7 8)� � 0,
onde 8 é uma constante.
Considerando que as misturas estejam branqueadas, aplica-se o método de
Newton para a solução da expressão anterior e assim se obtêm a seguinte regra de
atualização:
17
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
)� ← ���1�)����� 2 ��16�)�
����)�
)� ←./
‖./‖,
onde G é uma função não quadrática e 16 é sua derivada. A expressão a seguir
poderia representar 1 e sua derivada, respectivamente:
1�;� �1��
log ?@�A� ��B�
16�;� � C��A���B�
Para recuperar várias fontes a partir da regra de atualização (ou regra de ajuste),
se faz necessário executá-la para vários vetores )�. Frequentemente, se tem um
problema em que o algoritmo sempre encontra a mesma fonte, ou seja, converge
para o mesmo ótimo. Neste caso, o problema é contornado da seguinte maneira:
Considere um problema de separação de três fontes distintas feita a extração da
primeira fonte. A extração da segunda fonte é feita aplicando a regra de ajuste.
Entretanto, a cada iteração se retira do vetor em processo de estimação a
contribuição do vetor referente à primeira fonte, de modo que esses dois vetores
sejam ortogonais. Podemos usar esta mesma estratégia para extrair a terceira fonte.
Deve-se, em cada iteração, retirar a contribuição dos dois vetores estimados e
assim por diante. Finalmente, a regra de aprendizagem do FastICA é descrito:
1. Centralizar e branquear as misturas;
2. Definir aleatoriamente valores iniciais para )� (colunas de W) e ortogonalizar
W de acordo com passo 5;
3. Para todo D faça )� ← ���1�)����� 2 ��16�)�
����)�;
4. Divida )� por sua norma;
5. Ortogonalizar ' ← �''����/';
6. Caso não convirja, volta para o passo 3.

18
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
8.3 JADE (JOINT APPROXIMATE DIAGONALIZATION OF EIGENMATRICES)
Um tensor cumulante de quarta ordem é uma matriz com quatro dimensões
cujas entradas são originadas pelo cruzamento de cumulantes de quarta ordem dos
dados.
Um tensor cumulante pode ser decomposto em valores próprios originando
uma matriz de valores próprios:
MMF λ=)(
Este algoritmo é baseado na decomposição em valores próprios, ou seja,
pode ser visto como uma diagonalização da matriz EEEE através da sua multiplicação
pela matriz W (matriz de mistura ortogonal, após o processo do branqueamento): tWMWFQ )(=
A matriz Q é diagonal porque F é uma combinação linear de M. Usam-se,
então, diferentes matrizes M para tentar tornar a matriz Q o mais diagonal possível
(porque, idealmente, esta matriz não pode ser exatamente diagonal).
A diagonalidade da matriz Q pode ser medida como a soma dos quadrados
dos elementos não pertencentes à sua diagonal: ∑≠ lk
klq 2 . Como a matriz W é
ortogonal, ao ser multiplicada por outra matriz, não altera a soma total dos
quadrados dos elementos dessa matriz, então minimizar a soma dos quadrados dos
elementos fora da diagonal é equivalente a maximizar a soma dos quadrados dos
elementos da diagonal.
Então, este algoritmo tem como objetivo maximizar a seguinte equação:
∑=i
ti WMWFdiagWJade 2|))((|)(
As matrizes Mi são escolhidas segundo as matrizes dos valores próprios do
tensor cumulante, ou seja, são matrizes que dão informação importante aos
cumulantes, pois partilham o mesmo espaço que o tensor cumulante.
Neste método as correlações não lineares entre as variáveis observadas e as
variáveis independentes são minimizadas. O algoritmo JADE não é muito eficiente
para dimensões elevadas, mas funciona corretamente quando o número de
variáveis é pequeno.

19
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
9 APLICAÇOES ICA
Um dos grandes desafios da engenharia biomédica é na avaliação das
alterações fisiológicas que ocorrem em diversos órgãos internos do corpo humano.
Existem problemas nas extrações das informações relevantes para diagnósticos, ou
seja, sinais de fontes biomédicos são geralmente fracos, não estacionários, com
ruídos e interferências (CICHOCKI; AMARI, 2002). A seguir têm-se algumas
aplicações da ICA em problemas de separação cega de fontes.
9.1 MONITORAMENTO DE BATIMENTOS CARDÍACOS
A ação mecânica dos músculos do coração é estimulada por sinais elétricos.
Estes níveis de sinais podem ser medidos e visualizados como funções de tempo
usando eletrocardiograma (ECG) (CICHOCKI; AMARI, 2002). Tal como para adultos
também seria possível medir a atividade elétrica do coração de um feto. As
características de um eletrocardiograma fetal (FECG) podem ser muito úteis para
determinar se um feto está se desenvolvendo corretamente, por exemplo. Estas
características incluem uma elevação da frequência cardíaca fetal que indica
estresse, arritmias. Obter uma informação fiel do FEGC é uma tarefa não trivial.
Problemas podem acontecer em virtude de que o eletrocardiograma também
contém informações dos batimentos cardíacos materno (MECG) (JAHN; AMARI et
al., 1999). Além disso, o FECG irá ocasionalmente sobrepor sinais ao MECG e
torná-lo normalmente difícil de detectar (CARDOSO, 1998). Também juntamente
com o MECG ruídos extensivos nestes sensores interferem no FECG e podem
mascarar completamente este. A separação destes sinais de fontes fetal e materno
de uma mulher grávida pode ser modelado como um problema BSS (HAYKIN,
2001a).
9.2 CANCELAMENTO DE RUÍDO E INTERFERÊNCIA
O sistema nervoso dos seres humanos e dos animais deve codificar e
processar informações sensoriais. Dentro deste contexto, os sinais codificados (as
imagens, sons) têm propriedades muito específicas. Uma das tarefas desafiadoras é
a de saber como fielmente detectar, localizar e melhorar os sinais cerebrais em que

20
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
muitas vezes as fontes são corrompidas. ICA e Análise Fatorial Adaptativo (AFA)
são abordagens promissoras para a eliminação de artefatos e ruídos provenientes
dos EEG / MEG (HE; REED, 1996) (JAHN; AMARI et al., 1999).
9.3 SISTEMAS DE COMUNICAÇÃO DIGITAL
Considere um sistema onde se têm múltiplos sinais de uma propagação de
comunicação sem fio, bem como um número de usuários difundidos em sinais
modulados digitalmente para uma estação base em um ambiente de vários
usuários. A transmissão destes sinais interage com diversos objetos físicos na
região antes de chegar à antena ou estação de base. Cada sinal segue caminhos
diferentes com atraso e atenuação. Este é um típico problema que é conhecido
como “multi-path fading” (CARDOSO, 1998). Além disto, em algumas redes de
celulares existem outras fontes adicionais de distorções. Estas interferências podem
ser causadas por vários utilizadores que partilham a mesma frequência e tempo.
Um problema desafiador é a separação e processamento de sinais cegos conjunta
de espaço-tempo e equalização dos sinais transmitidos, isto é, para estimar a fonte
de sinais e seus canais na presença de outros sinais e ruído (HAYKIN, 2001a).
10 EXEMPLO DA APLICAÇÃO ICA UTILIZANDO MATLAB
Neste experimento utilizamos 3 sinais de fontes que são misturados por uma
matriz 3x3 gerado aleatoriamente e finalmente estimado pelo P-ICA. Vamos
primeiramente descrever o método P-ICA dado pelo pca_ica.m. E o método utilizado
para realizar o branqueamento é dado por branqueamento.m.
% A seguinte função implementa o P-ICA linear % % Entrada: x é mistura uma matriz(dxn) % % y é os sinais estimados % w é a matriz de mistura (inversa de A) % % % Autor: Nielsen C. Damasceno % Data: 20.12.2010 function [y,w] = pca_ica(x) n = size(x,1);

21
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
[E, D] = eig(cov(x')); v = E*D^(-0.5)*E' * x; z = repmat(sqrt(sum(v.^2)),n,1).*v; [EE, DD] = eig(cov(z')); y = EE'*v; w = EE'; end % A seguinte função implementa o branqueamento % % Entrada: x é mistura uma matriz(dxn) % % y é uma matriz (dxn)que é o resultado d o branqueamento % % % Autor: Nielsen C. Damasceno % Data: 20.12.2010 function [y] = branqueamento(x) [E, D] = eig(cov(x')); y = E*D^(-0.5)*E' * x; end
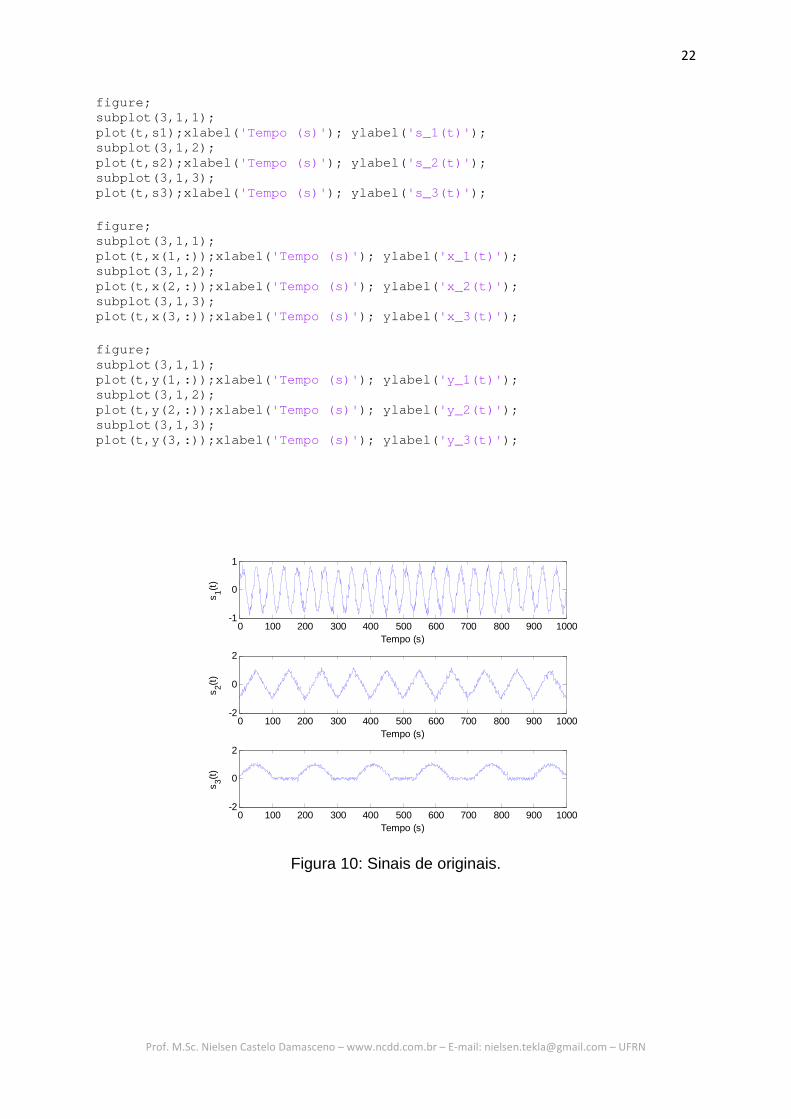
O codigo-fonte a seguir descreve a estimação de 3 fontes independentes, a
Figura 10, 11 e 12 representa os sinais de fontes, as misturas e os sinais estimados,
respectivamente.
clear all ; close all ;clc; N = 1000; % Número de pontos (correspondem a 4 segundos de da dos) fs = 500; % Frequência de amostragem w = (1:N)*2*pi/fs; % Normalização do vector da frequência t = (1:N); % Vector do tempo % Criação dos três sinais com ruído s1 = 0.75*sin(w*12)+0.1*randn(1,N); % Seno duplo s2 = sawtooth(w*5,0.5)+0.1*randn(1,N); % Onda triangular s3 = pulstran((0:999),(0:5)'*180,kaiser(100,3))+ 0. 07*randn(1,N); % Onda periódica %Elementos da matriz de mistura a = rand(3); s =[s1; s2; s3]; % Matriz das fontes originais x = a * s; % Sinais misturados/observados % Branqueamento da mistura x = branqueamento(x); % Método ICA (usando o algoritmo P-ICA) y = pca_ica(x); % Gráfico dos resultados
22
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
figure; subplot(3,1,1); plot(t,s1);xlabel( 'Tempo (s)' ); ylabel( 's_1(t)' ); subplot(3,1,2); plot(t,s2);xlabel( 'Tempo (s)' ); ylabel( 's_2(t)' ); subplot(3,1,3); plot(t,s3);xlabel( 'Tempo (s)' ); ylabel( 's_3(t)' ); figure; subplot(3,1,1); plot(t,x(1,:));xlabel( 'Tempo (s)' ); ylabel( 'x_1(t)' ); subplot(3,1,2); plot(t,x(2,:));xlabel( 'Tempo (s)' ); ylabel( 'x_2(t)' ); subplot(3,1,3); plot(t,x(3,:));xlabel( 'Tempo (s)' ); ylabel( 'x_3(t)' ); figure; subplot(3,1,1); plot(t,y(1,:));xlabel( 'Tempo (s)' ); ylabel( 'y_1(t)' ); subplot(3,1,2); plot(t,y(2,:));xlabel( 'Tempo (s)' ); ylabel( 'y_2(t)' ); subplot(3,1,3); plot(t,y(3,:));xlabel( 'Tempo (s)' ); ylabel( 'y_3(t)' );
Figura 10: Sinais de originais.
0 100 200 300 400 500 600 700 800 900 1000-1
0
1
Tempo (s)
s 1(t)
0 100 200 300 400 500 600 700 800 900 1000-2
0
2
Tempo (s)
s 2(t)
0 100 200 300 400 500 600 700 800 900 1000-2
0
2
Tempo (s)
s 3(t)

23
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
Figura 11: Sinais de misturas utilizando uma matriz 3x3.
Figura 11: Sinais estimados utilizando P-ICA.
OBS.: O código-fonte pode ser baixado no meu site em http://www.ncdd.com.br. E tutorial é baseado no texto de apoio e Taíssa Pereira e Sónia Ferreira. Algoritmo de Diagnóstico e de Auto-Regulação. Engenharia Biomédica 2010.
0 100 200 300 400 500 600 700 800 900 1000-5
0
5
Tempo (s)
x 1(t)
0 100 200 300 400 500 600 700 800 900 1000-5
0
5
Tempo (s)
x 2(t)
0 100 200 300 400 500 600 700 800 900 1000-5
0
5
Tempo (s)
x 3(t)
0 100 200 300 400 500 600 700 800 900 1000-2
0
2
Tempo (s)
y 1(t)
0 100 200 300 400 500 600 700 800 900 1000-5
0
5
Tempo (s)
y 2(t)
0 100 200 300 400 500 600 700 800 900 1000-5
0
5
Tempo (s)
y 3(t)

24
Prof. M.Sc. Nielsen Castelo Damasceno – www.ncdd.com.br – E-mail: [email protected] – UFRN
REFERÊNCIAS
CARDOSO J., “Blind signal separation: statistical principles” , Proc. IEEE 86 (10) 1998.
CARDOSO J., “ High-order contrasts for independent component anal ysis” , Neural Computation, pag. 157-192, 1999.
CICHOCKI A., AMARI S., “Adaptive Blind Signal and Image Processing: Learning Algorithms and Applications” , John Wiley, New York, USA, 2002.
COMON P., “Independent component analysis, a new concept?” , Signal Process,1994.
HAYKIN S., “Redes Neurais: Princípios e prática” . 2ª ed. Porto Alegre: Bookman,
2001a.
HE R., J. REED. “A robust co-channel interference rejection techniqu e for current mobile phone system” . In Proc. IEEE VTC, pag. 1195–1199 vol.2, Atlanta, GA, 1996.
HYVÄRINEN A., E.OJA. “Independent component analysis: A tutorial” . Technical report, 1999.
HYVÄRINEN A., “Survey on independent component analysis”, Neural Computer Surveys 2, 1999a.
HYVÄRINEN A., “Fast and robust Fixed-point algorithms for independ ent component analysis” , IEEE Trans. Neural Networks 10, 1999c.
HYVÄRINEN A., E. OJA. “Independent Component Analisys: Algorithms and applications. Neural Networks” , 2000.
JAHN O., A. CICHOCKI, A. IOANNIDES, S. AMARI. “Identification and elimination of artifacts from MEG signals using efficient indep endent components analysis” , In Proc. of th 11th Int. Conference on Biomagentism BIOMAG-98, pag. 224–227, Sendai, Japan, 1999.
KUN Z, Lai-WAN CHAN, "ICA by PCA Approach: Relating Higher-Order Statistics to Second-Order Moments" , 2006.
PAPOULIS, A. “Probability, Random Variables, and Stochastic Proce sses” , McGraw-Hill, 3rd edition, 1991.
POBLADOR S., V., MONTE-MORENO, E. & SOLÉ-CASAL, J. “ICA as a Preprocessing Technique for Classification” , In Proceedings of the Fifth International Workshop on Independent Component Analysis and Blind Signal Separation, ICA 2004, pag. 1165-1172, Granada, Espanha, 2004.







