diseÑo de un dispositivo de carga y transporte de …
TRANSCRIPT

DISEÑO DE UN DISPOSITIVO DE CARGA Y TRANSPORTE DE TUBOS DE ACERO
DE 6 METROS DE LONGITUD
DANIEL FELIPE LÓPEZ ACOSTA
Asesora,
LAURA JULIANA SUÁREZ COLLAZOS
UNIVERSIDAD DE LOS ANDES FACTULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA MECÁNICA DICIEMBRE DE 2018

Agradecimientos Mis agradecimientos son principalmente para Dios y para mi familia. A mi madre quien siempre está presente con su palabra de sabiduría y amor, y a mi padre quien está dispuesto a tenderme su mano en los momentos más importantes o difíciles. También quiero agradecer a mis profesores del departamento de Ingeniería Mecánica y de manera especial a la profesora Laura Suárez por acoger este proyecto y ayudarme a ejecutarlo. También le agradezco a mis amigos y compañeros por su apoyo incondicional y su disponibilidad para aprender.
TABLA DE CONTENIDO
1. Introducción ........................................................................................................................................ 1 2. Marco teórico ...................................................................................................................................... 2
2.1. Antecedentes .................................................................................................................................... 2 2.2. Dispositivos existentes ...................................................................................................................... 3 2.3. Elevadores ......................................................................................................................................... 4
3. Objetivos ............................................................................................................................................. 5 4. Restricciones de diseño ....................................................................................................................... 5
4.1. Análisis de condiciones de operación ............................................................................................... 5 4.2. Dimensiones de diseño permitidas ................................................................................................... 6 4.2.1. Máximo ancho del dispositivo ............................................................................................................. 6 4.2.2. Longitud de la carrera del elevador y altura del dispositivo ................................................................ 6 4.3. Análisis de condiciones de carga ....................................................................................................... 7 4.3.1. Condiciones críticas de carga ............................................................................................................... 8
5. Longitud de la plataforma del elevador ............................................................................................... 9 5.1. Deflexión de los tubos sobre la plataforma ...................................................................................... 9 5.2. Mínima fricción requerida en la plataforma ................................................................................... 11
6. Diseño de la plataforma .................................................................................................................... 12 6.1. Especificaciones de dimensiones de la plataforma ........................................................................ 12 6.2. Diseño de la estructura de la plataforma ....................................................................................... 13 6.2.1. Condiciones críticas para el diseño .................................................................................................... 13 6.2.2. Perfiles estructurales ......................................................................................................................... 14 6.2.3. Uniones de los perfiles ....................................................................................................................... 15 6.2.3.1. Determinación de esfuerzos para perfiles soldados ....................................................................... 15 6.2.3.2. Determinación de esfuerzos para uniones no permanentes .......................................................... 16 6.2.3.2.1. Selección de los pernos ................................................................................................................ 16 6.2.3.2.2. Determinación de esfuerzos ........................................................................................................ 17 6.3. Ensamble de la plataforma ............................................................................................................. 19 6.3.1. Simulación de las reacciones en los apoyos para condiciones de carga críticas ................................ 20
7. Diseño de las columnas ..................................................................................................................... 21 7.1. Dimensiones de las columnas ......................................................................................................... 21 7.2. Material de las columnas ................................................................................................................ 22 7.3. Análisis computacional de las columnas ......................................................................................... 22
8. Diseño del mecanismo elevador ........................................................................................................ 24 8.1. Análisis de las condiciones cinemáticas y de carga de los husillos ................................................. 24 8.2. Selección de los husillos .................................................................................................................. 26 8.2.1. Husillo trapezoidal ............................................................................................................................. 26 8.2.2. Husillo de bolas .................................................................................................................................. 28 8.2.2.1. Precisión Requerida ........................................................................................................................ 28 8.2.2.2. Paso requerido ................................................................................................................................ 29 8.2.2.3. Longitud del eje ............................................................................................................................... 29 8.2.2.4. Diámetro del eje .............................................................................................................................. 29 8.2.2.5. Selección del modelo del husillo ..................................................................................................... 30 8.2.2.6. Referencia del husillo ...................................................................................................................... 31 8.2.2.7. Carga axial permisible ..................................................................................................................... 31 8.2.2.8. Selección de la referencia del husillo .............................................................................................. 33 8.2.2.9. Vida útil del husillo .......................................................................................................................... 34 8.3. Torque y potencia requeridos en los husillos ................................................................................. 35

8.3.1. Torque y potencia para el Husillo de bolas ........................................................................................ 36 8.3.2. Torque y potencia para el Husillo trapezoidal ................................................................................... 37 8.4. Selección del husillo ........................................................................................................................ 38 8.5. Soportes en los extremos del eje. ................................................................................................... 39
9. Diseño de la guía ............................................................................................................................... 40 9.1. Restricciones del diseño.................................................................................................................. 40 9.2. Geometría de la guía ....................................................................................................................... 41 9.3. Selección de los rodamientos ......................................................................................................... 42 9.3.1. Validación del diámetro del eje ......................................................................................................... 42 9.4. Pernos de sujeción .......................................................................................................................... 43
10. Transmisión de potencia ............................................................................................................... 43 10.1. Selección de las poleas.................................................................................................................... 43 10.1.1. Condiciones de diseño ..................................................................................................................... 44 10.1.2. Factor de seguridad.......................................................................................................................... 44 10.1.3. Selección del tipo de correa ............................................................................................................. 45 10.1.4. Diámetro de la polea ........................................................................................................................ 45 10.1.5. Selección de la referencia ................................................................................................................ 45 10.1.6. Longitud de la correa ....................................................................................................................... 46 10.2. Selección de la caja de engranajes .................................................................................................. 46 10.3. Sistema de seguridad ...................................................................................................................... 47
11. Ensamble del dispositivo ............................................................................................................... 48 11.1. Anclaje columnas ............................................................................................................................ 48 11.2. Anclaje de rodamientos para los ejes del husillo ............................................................................ 48
12. Diseño del movimiento de la mesa móvil ...................................................................................... 50 12.1. Máximo radio de giro ...................................................................................................................... 50
13. Análisis Económico ........................................................................................................................ 51 14. Conclusiones y trabajos futuros .................................................................................................... 52 15. Referencias ................................................................................................................................... 52
ANEXOS PLANOS

LISTA DE ILUSTRACIONES Y GRÁFICOS
ILUSTRACIÓN 1: MONTACARGA. ................................................................................................................................. 3 ILUSTRACIÓN 2: ELEVADOR MANUAL. .......................................................................................................................... 3 ILUSTRACIÓN 3: PUENTE GRÚA. .................................................................................................................................. 3 ILUSTRACIÓN 4: ELEVADOR TIPO TIJERA. ...................................................................................................................... 4 ILUSTRACIÓN 5: ELEVADOR DE UNA COLUMNA. ............................................................................................................. 4 ILUSTRACIÓN 6: ELEVADOR DE DOS COLUMNAS. ............................................................................................................ 4 ILUSTRACIÓN 7: DIMENSIONES APROXIMADAS DEL DISPOSITIVO EN EL EJE VERTICAL [7] ......................................................... 7 ILUSTRACIÓN 8: DIAGRAMA DE CUERPO LIBRE, MECANISMO GENERA EN CONDICIÓN ESTÁTICA ................................................ 7 ILUSTRACIÓN 9: CONDICIONES DE CARGA CRÍTICA .......................................................................................................... 8 ILUSTRACIÓN 10: CARGA DISTRIBUIDA DE LOS TUBOS ..................................................................................................... 9 ILUSTRACIÓN 11: CASO DE EJEMPLO, PLATAFORMA DE LONGITUD DE 1.5M ...................................................................... 10 ILUSTRACIÓN 12: FUERZAS DE FRICCIÓN SOBRE LA PLATAFORMA DEBIDO A LA ROTACIÓN, CARGA CENTRADA ........................... 11 ILUSTRACIÓN 13: FUERZAS DE FRICCIÓN SOBRE LA PLATAFORMA DEBIDO A LA ROTACIÓN, CARGA CENTRADA ........................... 11 ILUSTRACIÓN 14: PERFIL UTILIZADO PARA EL DIMENSIONAMIENTO DE LA PLATAFORMA ....................................................... 13 ILUSTRACIÓN 15: CONDICIÓN CRÍTICA PARA EL DISEÑO DE LA ESTRUCTURA DE LA PLATAFORMA ............................................ 13 ILUSTRACIÓN 16: CONFIGURACIÓN DE LA ESTRUCTURA ................................................................................................. 14 ILUSTRACIÓN 17: ENMALLADO DE LA SIMULACIÓN DE LA ESTRUCTURA DE LA PLATAFORMA SOLDADA ..................................... 15 ILUSTRACIÓN 18: RESULTADOS DE LA TENSIÓN VON MISES PARA LA SIMULACIÓN DE LA ESTRUCTURA SOLDADA ....................... 16 ILUSTRACIÓN 19: LONGITUD DEL TORNILLO REQUERIDA ................................................................................................ 16 ILUSTRACIÓN 20: UBICACIÓN DE LOS PERNOS EN LA ESTRUCTURA ................................................................................... 17 ILUSTRACIÓN 21: ENMALLADO DE LA SIMULACIÓN DE LA ESTRUCTURA DE LA PLATAFORMA CON PERNOS ................................ 18 ILUSTRACIÓN 22: ESFUERZO VON MISES PRESENTE EN LA ESTRUCTURA CON PERNOS .......................................................... 18 ILUSTRACIÓN 23: COEFICIENTE DE SEGURIDAD PARA LOS PERNOS DE LA ESTRUCTURA .......................................................... 19 ILUSTRACIÓN 24: PLATAFORMA DEL DISPOSITIVO ........................................................................................................ 19 ILUSTRACIÓN 25: PARÁMETROS DE SIMULACIÓN ESTRUCTURAL ...................................................................................... 20 ILUSTRACIÓN 26: DIAGRAMA DE FUERZAS EN LA DIRECCIÓN VERTICAL DE LA VIGA PRINCIPAL ................................................ 20 ILUSTRACIÓN 27:DIAGRAMA DE MOMENTOS EN LA DIRECCIÓN PERPENDICULAR A LA FUERZA EN DIRECCIÓN A LA VIGA .............. 21 ILUSTRACIÓN 28: DIAGRAMA DE MOMENTOS EN LA DIRECCIÓN PERPENDICULAR A LA FUERZA Y PERPENDICULAR A LA VIGA ........ 21 ILUSTRACIÓN 29: DIMENSIONES DEL PERFIL C DE LAS COLUMNAS .................................................................................... 22 ILUSTRACIÓN 30: CARGAS EN LAS COLUMNAS Y HUSILLOS .............................................................................................. 23 ILUSTRACIÓN 31: DIAGRAMA DE CUERPO LIBRE DINÁMICO DEL MECANISMO. ETAPA 4 ........................................................ 25 ILUSTRACIÓN 32: MECANISMO ELEVADOR TORNILLO TRAPEZOIDAL ................................................................................. 28 ILUSTRACIÓN 33: MECANISMO ELEVADOR CON HUSILLO DE BOLAS .................................................................................. 34 ILUSTRACIÓN 34: VOLANTE REQUERIDO ..................................................................................................................... 38 ILUSTRACIÓN 35: SOPORTE DE LOS EJES SUPERIOR ....................................................................................................... 39 ILUSTRACIÓN 36: SOPORTE FIJO PARA EJES ................................................................................................................. 39 ILUSTRACIÓN 37: CONDICIONES DE DISEÑO DE LA GUÍA ................................................................................................. 40 ILUSTRACIÓN 38: DIAGRAMA DE CUERPO LIBRE GUÍA.................................................................................................... 40 ILUSTRACIÓN 39: COMPONENTES DE LA GUÍA ............................................................................................................. 41 ILUSTRACIÓN 40: ENSAMBLE DE LA GUÍA .................................................................................................................... 43 ILUSTRACIÓN 41: DISTANCIA ENTRE EJES DE LOS HUSILLOS ............................................................................................. 44 ILUSTRACIÓN 42: SISTEMA DE POLEA......................................................................................................................... 46 ILUSTRACIÓN 43: CAMBIO DE DIRECCIÓN DE LA VELOCIDAD ANGULAR .............................................................................. 47 ILUSTRACIÓN 44: ENGRANAJES CÓNICOS .................................................................................................................... 47 ILUSTRACIÓN 45: SISTEMA DE SEGURIDAD DE BLOQUEO [15] ......................................................................................... 47 ILUSTRACIÓN 46: ANCLAJE DE LAS COLUMNAS ............................................................................................................ 48 ILUSTRACIÓN 47: ANCLAJE RODAMIENTOS EJE HUSILLO EN LA PLATAFORMA SUPERIOR ........................................................ 49

ILUSTRACIÓN 48: ANCLAJE UNIDADES DE SOPORTE FIJO HUSILLOS ................................................................................... 49 ILUSTRACIÓN 49: RADIO DE GIRO DEL DISPOSITIVO....................................................................................................... 50 ILUSTRACIÓN 50: RADIO DE GIRO MÁXIMO PERMITIDO ................................................................................................. 51
GRÁFICO 1: DEFLEXIÓN DEL TUBO A DIFERENTE LONGITUD DE LA PLATAFORMA .................................................................. 10 GRÁFICO 2: VELOCIDAD DEL MECANISMO EN FUNCIÓN DEL TIEMPO ................................................................................. 24 GRÁFICO 3: CRITERIO GRÁFICO PV PARA SELECCIÓN DE HUSILLO TRAPEZOIDAL [12] ........................................................... 27 GRÁFICO 4: SELECCIÓN DEL TIPO DE POLEA [14] .......................................................................................................... 45 GRÁFICO 5: DISTRIBUCIÓN DE COSTOS DEL DISPOSITIVO ................................................................................................ 51
LISTA DE TABLAS
TABLA 1: PROPIEDADES DEL MATERIAL DE LA TUBERÍA DE ACERO .................................................................................... 10 TABLA 2: PERFILES ESTRUCTURA DE LA PLATAFORMA .................................................................................................... 14 TABLA 3: CARGAS EN LOS SOPORTES DE LA ESTRUCTURA ............................................................................................... 21 TABLA 4: VALORES DE CARGA MÁXIMOS PARA LAS REACCIONES DE LA COLUMNA Y HUSILLOS ................................................ 23 TABLA 5: ECUACIONES EN CADA ETAPA DEL MOVIMIENTO Y FUERZA AXIAL ........................................................................ 25 TABLA 6: PARÁMETROS DEL HUSILLO TRAPEZOIDAL THK DCM 20 [12] .......................................................................... 26 TABLA 7: PRECISIÓN DEL ÁNGULO DE PASO [13] .......................................................................................................... 28 TABLA 8: LONGITUD MÁXIMA DEL HUSILLO POR NIVEL DE PRECISIÓN [13] ........................................................................ 29 TABLA 9: COMBINACIONES ESTÁNDAR DEL DIÁMETRO DE EJE Y PASO DEL HUSILLO DE BOLAS LAMINADO [13] .......................... 30 TABLA 10: TIPOS DE HUSILLO DE BOLAS LAMINADOS [13] ............................................................................................. 30 TABLA 11: REFERENCIAS DEL HUSILLO DE BOLAS MODELO BLK [13] ................................................................................ 31 TABLA 12: FACTOR DE SEGURIDAD ESTÁTICO DEBIDO A LAS CONDICIONES DE CARGA [13] ................................................... 33 TABLA 13: CARGA MÁXIMA PERMITIDA PARA LOS MODELOS ENFRENTADOS ...................................................................... 33 TABLA 14: FACTOR DE CARGA DE UN HUSILLO DE BOLAS [13] ........................................................................................ 34 TABLA 15: FUERZA AXIAL PROMEDIO ......................................................................................................................... 35 TABLA 16: TORQUE Y POTENCIA REQUERIDOS EN EL HUSILLO DE BOLAS ............................................................................ 37 TABLA 17: TORQUE Y POTENCIA REQUERIDOS EN EL HUSILLO TRAPEZOIDAL ....................................................................... 38 TABLA 18: FUERZA REQUERIDA POR EL OPERARIO ........................................................................................................ 38 TABLA 19: PARÁMETROS PARA SELECCIÓN DE POLEAS EN V ........................................................................................... 44 TABLA 20: TABLA DE SELECCIÓN DE DIÁMETROS [14] ................................................................................................... 45
1
1. Introducción
Actualmente, las empresas invierten recursos en buscar soluciones y herramientas para mitigar los
accidentes e incidentes en los lugares de trabajo. Un accidente laboral puede generar pérdidas de
vida o lesiones permanentes en los afectados y generar costos adicionales en la ejecución de un
proyecto.
El mayor número de accidentes laborales es debido a errores humanos o actos inseguros que se
cometen ya sea para “facilitar” una labor o por desconocimiento de los involucrados, y se presenta
en mayor medida en la industria de la construcción o en plantas de producción [1].
La manipulación de cargas es un trabajo realizado en gran parte de los ámbitos de la industria siendo
una tarea efectuada por el 38% de los trabajadores, según datos de la agencia europea para la
seguridad y la salud en el trabajo [2]. Manipular cargas puede producir efectos de deterioro en el
sistema musculoesquelético ya sea en forma de dolores musculares o traumatismos como cortes o
fracturas.
Se considera una manipulación de carga pesada cuando se mueven cargas que excedan 3 Kg. El peso
máximo que se recomienda no exceder son 25 Kg, sin embargo, algunas cargas, por su tamaño o su
dificultad de transporte, no permiten levantar este peso [3].
Las medidas de prevención que toman las empresas consisten en la implementación de cargos
rotativos en los trabajadores, con el fin de no exponerlos a la manipulación de altas cargas por un
periodo de tiempo prolongado o la realización de campañas de capacitación y cuidado.
Este proyecto busca encontrar una solución mediante el diseño de un mecanismo que permita
transportar tuberías de acero de 6 metros de longitud, medida estándar dentro de la industria
metalúrgica, con el fin de mitigar el impacto sobre el sistema musculoesquelético de los
trabajadores de una planta de producción o zonas de construcción que realicen la manipulación de
dicha carga, y de este modo, contribuir en la reducción de accidentes laborales en el sector
industrial.

2
2. Marco teórico
En este capítulo se presentan algunas cifras estadísticas en Colombia acerca de riesgos y accidentes
laborales en el país, así como soluciones existentes para carga de material desarrollando un análisis
de ventajas y desventajas de cada una.
2.1. Antecedentes
La industria colombiana es regulada por el sistema de seguridad y salud en el trabajo establecido
por el Ministerio de Trabajo. Con estas políticas de protección se busca reducir el riesgo de los
trabajadores al efectuar sus tareas y mejorar los ambientes laborales. Las empresas deben regir sus
operaciones basados en las normas establecidas buscando maneras de mejorar sus capacidades de
producción de forma segura para sus empleados.
En plantas de producción, el transporte y levantamiento de cargas es un proceso que genera
problemas musculoesqueléticos a los operarios, generalmente por realizar esfuerzos excesivos y
malas posturas. En Colombia, aproximadamente el 67% de las enfermedades laborales reportadas
por EPS se presentan en este sistema. Mientras los sectores que más reportan accidentalidad son la
industria de manufactura y construcción con una participación de 16.5% y 12.7% respectivamente
[4].
El 21.8% de las actividades de promoción de la salud empresariales están enfocadas en la prevención
de lesiones osteomusculares [4], sin embargo, sigue siendo la patología predominante en la
estadística. Es por ello por lo que se busca automatizar ciertos procesos industriales o diseñar
mecanismos que apoyen a los operarios en las tareas que los sometan a riesgos de estas lesiones.

3
2.2. Dispositivos existentes
1 Tomado de: http://www.rylsa.com.co/index.php/productos/sectores/industria/equipo-liviano-y-utilitario/montacargas-doosan 2 Tomado de: http://impofer.com/productoalea.php?cod=3893200 3 Tomado de: http://www.directindustry.es/prod/verlinde/product-8590-1433939.html
SOLUCIÓN EXISTENTE VENTAJA DESVENTAJA
Ilustración 1: Montacarga.1
Este dispositivo permite levantar y transportar diferentes niveles de carga, dependiendo del modelo y el fabricante. Son operados por motores, ya sean diésel, gasolina o eléctrico, ofreciendo versatilidad. Generalmente son utilizados para levantar grandes cargas en puertos o almacenes
La principal desventaja es su precio, el cual puede ir desde $10.000.000 hasta más de $100.000.000.
Ilustración 2: Elevador manual.2
Su funcionamiento es exactamente igual al del montacarga, sin embargo, no cuenta con motores para funcionar. La carga que se puede manipular es de unas pocas toneladas dependiendo del mecanismo de elevación, generalmente hidráulico.
Para transportar las cargas para las cuales se diseña este proyecto, este tipo de elevador no es viable debido a que los tubos deben ir paralelamente al vehículo debido a su longitud.
Ilustración 3: Puente grúa.3
Este sistema es muy utilizado en la industria petrolera, automotriz, almacenes, puertos marítimos y todos aquellos complejos que requieran el transporte de carga muy pesada. Son dispositivos diseñados para transportar cargas de más de 50 Toneladas llegando algunos hasta 320 Toneladas.
La principal desventaja es que solo pueden transportar cargas en espacios establecidos por los rieles. Tampoco es posible instalarlos en espacios abiertos reducidos.

4
2.3. Elevadores
TIPO DE ELEVADOR FUNCIONAMIENTO DESVENTAJA
Ilustración 4: Elevador tipo tijera.4
Este tipo de elevador permite levantar cargas utilizando una estructura retráctil. Es operado con un actuador hidráulico ubicado en la estructura.
Su principal desventaja es que no puede ser operado manualmente dado que el sistema hidráulico requiere de un sistema de control electrónico.
Ilustración 5: Elevador de una columna.5
Este tipo de elevador permite levantar cargas mediante un sistema de tornillo sin fin ubicado dentro de la columna y accionado por un motor eléctrico o un sistema hidráulico. Las cargas son transmitidas a la base mediante un sistema de guía interno.
Se requiere de un sistema que provea de seguridad en condiciones críticas por lo que estando montado en una plataforma móvil puede generar condiciones inseguras.
Ilustración 6: Elevador de dos columnas6.
Este tipo de elevador cuenta con un sistema de tornillo sin fin y un motor eléctrico similar al del elevador de una columna o un sistema electrohidráulico para cargas más pesadas. Generalmente el mecanismo motriz se encuentra dentro de una columna mientras que a la otra se le transfiere la potencia mediante poleas.
4 Tomado de http://www.alquilerdeplataformas.com/elevadores-tijera.html 5 Tomado de: https://www.milanuncios.com/otros-motor/mini-elevador-1-columna-mk300-150928614.html 6 Tomado de: https://dismaqcenter.wordpress.com/catalogo-2/2-columnas/2-columnas/

5
La ventaja es que por su diseño no se requiere de un anclaje complejo a tierra, lo cual permite instalarse fácilmente brindando estabilidad y seguridad en la operación.
3. Objetivos
Diseñar un sistema de transporte y elevación manual de tubos de alto peso y longitud para plantas
de producción para la reducción del riesgo de lesión de los operarios.
Ello se logra mediante el cumplimiento de los siguientes objetivos específicos:
• Identificar las variables y parámetros de diseño del mecanismo.
• Diseñar y especificar un prototipo de un sistema mecánico involucrando ventaja mecánica
y mecanismos, capaz de levantar y transportar de forma segura tubos de acero de máximo
6 metros de longitud.
• Realizar un análisis de costos validando su viabilidad financiera.
4. Restricciones de diseño
En este capítulo se presentan los requerimientos y restricciones del diseño del elevador. Se calculan
las condiciones de carga en el punto de operación, así como la carga crítica, las condiciones de
operación como el entorno y las horas de uso y finalmente las normas que rigen los pasillos de
tránsito en una planta de producción con el fin de adecuar el producto para operarlo en diferentes
industrias. Como requerimiento general, el diseño se hace pensando en fabricar la menor cantidad
de piezas posibles y utilizar piezas estándares y normativas ASME y DIN. La mayor cantidad de piezas
serán obtenidas de proveedores garantizando la calidad de la manufactura y la facilidad de
ensamble.
4.1. Análisis de condiciones de operación
• El mecanismo será utilizado en condiciones con alto grado de contaminación por polvo,
gases debido a los procesos de soldadura y materiales particulados. Es por ello por lo que
se requiere que el diseño tenga en consideración protección a los elementos mecánicos
delicados, como el mecanismo elevador o los rodamientos.
• El sistema será operado manualmente por los operarios de una planta industrial por lo cual
los elementos móviles deben estar cubiertos por resguardos evitando accidentes debido a
atrapamientos, calentamiento, etc.
• La temperatura ambiente oscila entre 0˚C hasta los 25˚C considerando que se diseña para
zonas como Bogotá o los alrededores industriales.

6
• Se asumen 3 turnos de operación en una planta de producción generando un trabajo
continuo las 24 horas del día. El mecanismo operará intermitentemente durante las
jornadas por lo que se calcula que 1/3 de este tiempo esté en operación.
Cada 2 minutos es capaz de realizar una subida y una bajada (Ver Sección 4.3) por lo tanto
en el tiempo de 8 horas al día se realizarán:
8 [ℎ𝑜𝑟𝑎𝑠
𝑑𝑖𝑎] ∗ 60 [
𝑚𝑖𝑛𝑢𝑡𝑜𝑠ℎ𝑜𝑟𝑎
]
2 [𝑚𝑖𝑛𝑢𝑡𝑜𝑠
𝑟𝑒𝑐𝑜𝑟𝑟𝑖𝑑𝑜]
= 240 𝑟𝑒𝑐𝑜𝑟𝑟𝑖𝑑𝑜𝑠/𝑑𝑖𝑎
Al año se utilizará 313 días restando los domingos del conteo, por lo tanto, el elevador hará
75120 recorridos/año.
• El suelo donde será operado es plano con un material de Resina Epoxi con acabado grano
[5] y pasos sobre rejillas de acero para carga clase E600, bajo norma DIN 1433
4.2. Dimensiones de diseño permitidas
Las restricciones de tamaño del dispositivo se basan en condiciones del espacio donde se va a
trabajar y las condiciones cinemáticas del dispositivo. Se diseña teniendo en cuenta normas
colombianas para la delimitación de espacios seguros con el fin de que sea operativo en la mayor
cantidad de industrias.
4.2.1. Máximo ancho del dispositivo
El dispositivo deberá operar en fábricas y pisos industriales donde se cumpla con la resolución 1016
de 1989 Articulo 11 Numeral 17: “Delimitar o demarcar las áreas de trabajo, zonas de
almacenamiento y vías de circulación y señalizar salidas, salidas de emergencia, resguardos y zonas
peligrosas de las máquinas e instalaciones de acuerdo con las disposiciones legales vigentes” [6],
debido a que las dimensiones del diseño se basan en la normativa colombiana.
Para tránsito de personas y vehículos montacargas en ancho mínimo de pasillo debe ser de 160 cm
por lo tanto este criterio será el máximo permitido en el diseño.
4.2.2. Longitud de la carrera del elevador y altura del dispositivo
El mecanismo elevador tendrá un solo grado de libertad en la dirección vertical. Teniendo en cuenta
que el sistema es operado manualmente, la máxima altura a la que es funcional es de 1.75 𝑚, siendo
esta la altura a la que una persona promedio puede manipular cargas [7].
La mínima altura del elevador está comprendida por la base móvil donde estará ubicado el volante7
para controlar movimiento del mecanismo. De acuerdo con mediciones antropométricas realizadas
por Rosalio Avila Chaurand et al. [8]; se estableció que la distancia desde el piso al codo promedio
7 Volante: Manivela sobre la cual el operario realiza fuerza para generar el torque requerido. (Sección 8.4)

7
para un hombre trabajador industrial en Latinoamérica, donde es óptimo realizar la fuerza para
elevar el mecanismo, es de 1070 𝑚𝑚.
Por lo tanto, la carrera del elevador será 750 𝑚𝑚. La Ilustración 7 evidencia las dimensiones para
el cálculo de la carrera del elevador.
Superando la altura máxima de la carrera se encuentran los rodamientos y soportes de los tornillos
de potencia por lo que la altura máxima del conjunto podrá ser de hasta 2 𝑚 y las dimensiones
reales podrán variar de acuerdo con las dimensiones de los componentes de los cuales se trabajarán
más adelante del documento.
4.3. Análisis de condiciones de carga
La función del mecanismo es cargar y transportar tres tubos de acero de 6 metros de longitud
como carga máxima con un grado de libertad de movimiento en el sentido vertical.
Las fuerzas que estarán presentes son: el peso de los tubos, el peso del mecanismo como la
plataforma, la guía y los rieles, la fuerza debida a la aceleración del sistema y la fuerza debido a
la inercia de los objetos presentes. La Ilustración 8 muestra de manera generar las fuerzas en
condición estática del mecanismo.
750 𝑚𝑚
1070 𝑚𝑚
𝑊𝑝𝑙𝑎𝑡𝑎𝑓𝑜𝑟𝑚𝑎
𝑅2𝑦 𝑅1𝑦
𝑊𝑡𝑢𝑏𝑜𝑠
𝑦
𝑥
Ilustración 7: Dimensiones aproximadas del dispositivo en el eje vertical [8]
Ilustración 8: Diagrama de cuerpo libre, mecanismo genera en condición estática

8
La fuerza 𝑊𝑡𝑢𝑏𝑜𝑠 y 𝑊𝑝𝑙𝑎𝑡𝑎𝑓𝑜𝑟𝑚𝑎 son calculados como la masa de los tubos y la masa sumada de
cada pieza de la plataforma multiplicado por la gravedad terrestre, (ver anexo: masa de las
piezas).
Para simplificar el análisis se establece la variable 𝑊 = 𝑊𝑡𝑢𝑏𝑜𝑠 + 𝑊𝑝𝑙𝑎𝑡𝑎𝑓𝑜𝑟𝑚𝑎.
𝑊𝑇𝑢𝑏𝑜𝑠 = 137.77 [𝐾𝑔] ∗ 9.8 [𝑚
𝑠2] ≈ 1351.5 𝑁
𝑊𝑝𝑙𝑎𝑡𝑎𝑓𝑜𝑟𝑚𝑎 = 25.2 [𝐾𝑔] ∗ 9.8 [𝑚
𝑠2] ≈ 250 𝑁
𝑊 = 1601.5 𝑁
Estos valores son una primera aproximación a los valores reales, los cuales serán presentados más
adelante, sin embargo, permiten comenzar con el proceso de diseño del elevador.
4.3.1.Condiciones críticas de carga
El diseño del mecanismo no se basará en la condición de operación óptima sino en las condiciones
de carga críticas. Esto garantiza que se tendrá un margen de seguridad en caso de error humano
reduciendo el riesgo de accidente durante su funcionamiento.
Cuando la carga de los tubos se encuentra completamente alineada con el centro de masa del
dispositivo, no existirán momentos de flexión en ninguna pieza y las cargas que se encuentran en el
plano de la carga serán cero, sin embargo, esta condición es improbable por lo que se debe tener
en cuenta en el diseño que las cargas estén mal ubicadas.
El punto donde se puede generar mayor riesgo de accidente es cuando el centro de gravedad de la
carga se encuentra lo más cercano posible al borde de la plataforma generando volcamiento,
momentos de torsión en los soportes de la estructura y esfuerzos internos axiales o cortantes tanto
en el material como en las juntas. La Ilustración 9 muestra el estado de carga en este punto.
𝑦
𝑧
𝑊𝑡𝑢𝑏𝑜𝑠
𝑀𝑟
𝑅𝑦
Ilustración 9: Condiciones de carga crítica

9
Para calcular las reacciones debido a la carga crítica 𝑀𝑟 y 𝑅𝑦, se asume que la plataforma no se
deforma y el peso de los tubos se modela como una carga distribuida triangular, donde el mínimo
valor es cero en el extremo izquierdo y el centro de masa se encuentra cargado al lado derecho
cerca al borde de la plataforma.
La longitud de la plataforma es 700 mm (SECCIÓN 5.2) por lo que la carga de la tubería se modela
como:
𝑊𝑡𝑢𝑏𝑜𝑠 =�̇�𝑡𝑢𝑏𝑜𝑠𝐿
2
Donde 𝑊𝑡𝑢𝑏𝑜𝑠̇ es la carga distribuida triangular
𝑊𝑡𝑢𝑏𝑜𝑠̇ =
2𝑊
𝐿=
2(1351.5)
0.7= 3861.43
𝑁
𝑚
5. Longitud de la plataforma del elevador
La plataforma donde se apoyan los tubos en el elevador es de las piezas más importantes en el
diseño, por lo tanto, se tienen en consideración variables que pueden perjudicar la seguridad y la
forma de operación del dispositivo en general.
5.1. Deflexión de los tubos sobre la plataforma
Debido a la longitud de los tubos, estos tienden a deflactarse debido al torque generado por su peso
y el momento de inercia que tiene la geometría del tubo a considerar. Se desea que la deflexión en
el punto medio sea mínima para garantizar que el área de contacto de los tubos con la plataforma
sea lo mayor posible, reduciendo la distribución de cargas no deseada.
Mediante el uso de análisis de elementos finitos de Autodesk inventor 2018 © y las ecuaciones de
singularidad para deflexión de vigas se realizaron iteraciones para determinar la longitud mínima de
la plataforma de rodillos del dispositivo garantizando una deflexión del tubo que no genere riesgo
de falla debido a los esfuerzos de tensión y momentos que se generen largo ésta.
Para ello se asumió una carga uniforme sobre un tubo de Acero AISI 4340. Las propiedades se
muestran en la Tabla 1:
Ilustración 10: Carga distribuida de los tubos
𝑦
𝑧
�̇�𝑡𝑢𝑏𝑜𝑠 = 3861.43𝑁
𝑚

10
NOMBRE ACERO AISI 4340
GENERAL Densidad de masa 7.85 g/cm^3
Límite de elasticidad 634 MPa
Resistencia máxima a
tracción
826 MPa
MECÁNICAS Módulo de Young 207 GPa
Coeficiente de Poisson 0.33 su
Módulo cortante 77.82 GPa
Tabla 1: Propiedades del material de la tubería de acero
Se varió la longitud de la plataforma, asumiendo como soportes de rodillo los extremos de esta y el
centro de masa del tubo completamente centrado con respecto a la plataforma, obteniendo el
desplazamiento máximo para las diferentes configuraciones.
Ilustración 11: Caso de ejemplo, plataforma de longitud de 1.5m
Donde 𝐿 es la longitud del tubo y 𝑠 es la longitud de la plataforma de rodillos.
Los resultados para la deflexión máxima se muestran en el Gráfico 1.
Gráfico 1: Deflexión del tubo a diferente longitud de la plataforma
De los datos obtenidos se evidencia que, aunque en el rango de longitud entre 0.5 𝑚 y 1 𝑚 la
deflexión máxima de los tubos es la mayor a comparación de longitudes siguientes, la deflexión en
el punto medio del tubo, donde se realiza el contacto con la plataforma, es mínimo: entre 0.009 𝑚𝑚
0
0.02
0.04
0.06
0.08
0
0.5
1
1.5
2
0 0.5 1 1.5 2 2.5 3
Def
lexi
ón
en
L/2
[m
m]
Def
lexi
ón
máx
ima
[mm
]
Longitud de la plataforma [m]
Deflexión de la tubería a diferente longitud de plataforma
Maxima deflex. (mm) Deflexion L/2 (mm)

11
y 0.033 𝑚𝑚; es decir, la longitud de la plataforma, para evitar una deflexión de los tubos en la
plataforma y garantizar una distribución de cargas optima, debe ser 0.5 ≤ 𝐿 ≤ 1 𝑚
5.2. Mínima fricción requerida en la plataforma
Esta restricción requiere del análisis del movimiento crítico del dispositivo dado que se pretende
encontrar la longitud de la plataforma para la cual se tendrá una condición segura de giro.
En el caso de rotación sobre el centro del mecanismo, se tiene una condición de riesgo debido a la
inercia del tubo girando sobre el eje 𝑦𝑦, esto implica establecer un mínimo de longitud de la
plataforma para que la fuerza de fricción en el contacto impida el movimiento rotacional de los
tubos.
En este caso, la fuerza de fricción se modela como una fuerza distribuida con una pendiente
constante sobre la plataforma, en el plano 𝑥𝑧 como se muestra en la Ilustración 13 .
𝑁 = 𝑚𝑔
Donde 𝐹𝑓 es la fuerza de fricción, 𝑁 es la normal de los tubos y 𝜇𝑠 = 0.61 [9] es el coeficiente de
fricción estático entre acero y aluminio, dado que la plataforma será de este material para reducir
el peso total.
Dado que la distribución de fuerzas de fricción tiene pendiente constante 𝑥/𝐿 entonces,
𝛿𝐹𝑓 = 𝜇𝑠𝑁𝑥
𝐿
Ilustración 12: Condición de rotación del dispositivo
𝛼
𝑥
𝑧
𝐿 𝑥
𝑧
𝛼
𝐹𝑓
Ilustración 12: Fuerzas de fricción sobre la plataforma debido a la rotación, carga centrada Ilustración 13: Fuerzas de fricción sobre la plataforma debido a la rotación, carga centrada

12
El torque debido a la fricción será:
�̅� = ∫ �̅� × 𝛿𝐹𝑓̅̅ ̅̅ ̅
�̅� = ∫ 𝜇𝑠𝑚𝑡𝑢𝑏𝑜𝑠𝑔𝑥
𝐿 𝑑𝑥
𝐿2
−𝐿2
𝑇 = 𝜇𝑠𝑚𝑡𝑢𝑏𝑜𝑠𝑔 (𝐿
4)
En la condición donde comienza el movimiento el torque debido a la fricción debe ser igual a la
inercia de los tubos por la aceleración angular
𝑇 = 𝐼𝑡𝑢𝑏𝑜𝑠𝛼
𝜇𝑠𝑚𝑔 (𝐿
4) = 𝐼𝑡𝑢𝑏𝑜𝑠𝛼
La máxima aceleración angular permitida se toma como 1𝑟𝑎𝑑
𝑠2 . El momento de inercia del tubo
girando por el eje 𝑦𝑦 es 𝐼𝑡𝑢𝑏𝑜𝑠 = 137.89 𝐾𝑔. 𝑚2. La masa de los tubos es 137.77 𝐾𝑔 (ver anexo
masa de las piezas). Y Despejando la longitud de la plataforma:
𝐿 =4𝐼𝑡𝑢𝑏𝑜𝑠𝛼
𝜇𝑠𝑚𝑔= 0.67 𝑚
Con el fin de simplificar cálculos posteriores y dar un margen de seguridad se establece la longitud
mínima de la plataforma en 0.7 𝑚, cumpliendo igualmente con el rango establecido en la sección
5.1.
6. Diseño de la plataforma
Teniendo claras las dimensiones requeridas para que la plataforma opere de forma segura se diseña
la estructura que va a soportar las cargas y las juntas de cada pieza. En este capítulo se presenta el
proceso de diseño y simulaciones seguido para validar la resistencia.
6.1. Especificaciones de dimensiones de la plataforma
De acuerdo con los análisis realizados en la sección 5.2 se establece que la longitud de la plataforma
es de 0.7 𝑚.
El requerimiento principal es transportar tubería comúnmente utilizada en la industria por lo tanto
se selecciona el perfil de mayor tamaño para diseñar la plataforma. Se selecciona un perfil
rectangular de 150 × 50 𝑚𝑚 como se muestra en la Ilustración 14.

13
Se buscan transportar hasta 3 tubos simultáneamente en el dispositivo por lo tanto el ancho
mínimo de la plataforma será de 450 𝑚𝑚. Dando una holgura al sistema, se asigna un ancho de
500 𝑚𝑚. Ver plano 2, Estructura de la plataforma.
6.2. Diseño de la estructura de la plataforma
La carga soportada en la plataforma es transmitida a los mecanismos elevadores mediante una
estructura bajo la plataforma. Para el diseño de esta sección se utilizaron las condiciones críticas
de operación del mecanismo mostradas en la sección 4.3.1.
Como se enunció en las restricciones del diseño, se pretende utilizar piezas disponibles en el
mercado colombiano con el fin de dar viabilidad y economía a la construcción del dispositivo. La
estructura de la plataforma será fabricada con perfiles rectangulares orientados de forma
estratégica y unidos mediante pernos.
La selección de los tubos estructurales rectangulares se basó en los catálogos de la empresa Tubos
Colmena S.A.S. [10]. Basado en las dimensiones de la plataforma se realizaron simulaciones
computacionales modificando los diferentes perfiles ofrecidos, y usando el software de diseño
mecánico Autodesk Inventor 2018©, se validaron las condiciones de esfuerzos, deflexión y
deformación mostrando resultados del factor de seguridad de la pieza, calculado
computacionalmente a partir de la teoría de falla de Von Mises.
6.2.1. Condiciones críticas para el diseño
Como se muestra en la Ilustración 9, la distancia del centro de masa de los tubos con el punto de
apoyo de la plataforma con el elevador genera un momento par que debe ser soportado por los
tubos de la estructura, requiriendo así un perfil con momento de inercia geométrico lo
suficientemente alto para garantizar que no exista deflexión excesiva que ponga en riesgo la carga.
Debido a la posibilidad de realizar simulación computacional no se aplica la aproximación
matemática debido a los supuestos que esta tiene, sino se simulan los tubos de 6 metros
completamente sobre la plataforma ubicados en la condición crítica como se muestra en la
Ilustración 15.
150 𝑚𝑚
50 𝑚𝑚
3000 𝑚𝑚 2650 𝑚𝑚
Ilustración 14: Perfil utilizado para el dimensionamiento de la plataforma
Ilustración 15: Condición crítica para el diseño de la estructura de la plataforma
14
6.2.2. Perfiles estructurales
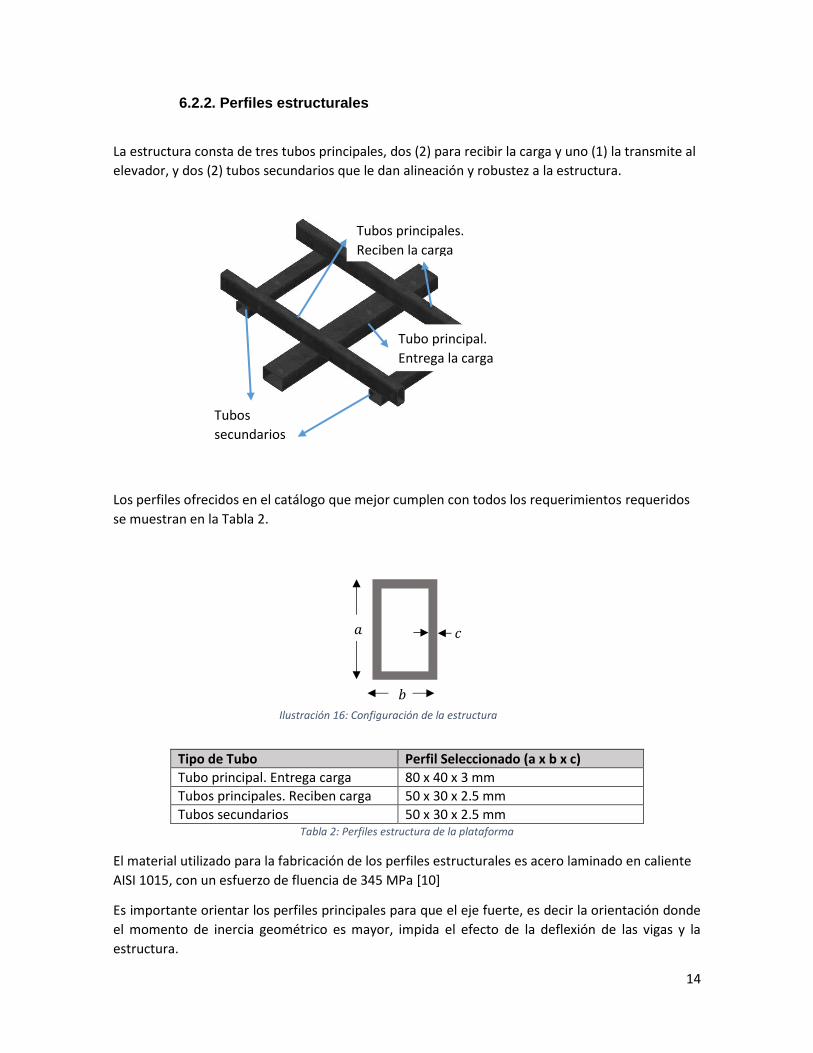
La estructura consta de tres tubos principales, dos (2) para recibir la carga y uno (1) la transmite al
elevador, y dos (2) tubos secundarios que le dan alineación y robustez a la estructura.
Los perfiles ofrecidos en el catálogo que mejor cumplen con todos los requerimientos requeridos
se muestran en la Tabla 2.
Tipo de Tubo Perfil Seleccionado (a x b x c)
Tubo principal. Entrega carga 80 x 40 x 3 mm
Tubos principales. Reciben carga 50 x 30 x 2.5 mm
Tubos secundarios 50 x 30 x 2.5 mm Tabla 2: Perfiles estructura de la plataforma
El material utilizado para la fabricación de los perfiles estructurales es acero laminado en caliente
AISI 1015, con un esfuerzo de fluencia de 345 MPa [10]
Es importante orientar los perfiles principales para que el eje fuerte, es decir la orientación donde
el momento de inercia geométrico es mayor, impida el efecto de la deflexión de las vigas y la
estructura.
Tubos principales.
Reciben la carga
Tubos
secundarios
Tubo principal.
Entrega la carga
𝑐
𝑏
𝑎
Ilustración 16: Configuración de la estructura

15
Las vigas principales que reciben la carga están orientadas de forma vertical dado que la flexión se
dará en esta dirección mientras la principal que entrega la carga esta horizontal para aumentar el
área de contacto en la superficie y distribuir la carga más uniformemente.
6.2.3.Uniones de los perfiles
Las uniones de los perfiles es parte clave en el diseño. Se tiene la posibilidad de realizar las uniones
permanentes con soldadura o de manera no permanente con el uso de pernos, sin afectar la
funcionalidad del sistema dado que no se requiere desensamble posterior de esta estructura, por
ejemplo, para realizar mantenimiento.
La facilidad de aplicar la soldadura puede ser una ventaja contra el uso de pernos, donde se debe
realizar un mecanizado antes de realizar la unión. Por ello se considera como primera opción y se
realiza un análisis computacional del comportamiento de la estructura.
En segundo lugar, se considera el uso de pernos para realizar la unión de los perfiles dando como
ventaja la eliminación de los concentradores de esfuerzo provocados por la soldadura y permitiendo
el ensamble del dispositivo más rápidamente.
6.2.3.1. Determinación de esfuerzos para perfiles soldados
Para la simulación se tienen las condiciones mostradas en la Ilustración 17. Las fuerzas que actúan
sobre la estructura son el peso de los tubos de 6 metros de longitud que está soportando y el propio
peso.
Ilustración 17: Enmallado de la simulación de la estructura de la plataforma soldada
La Ilustración 18 muestra un concentrador de esfuerzos en los puntos de la soldadura de 1808 MPa,
el cual sobrepasa el esfuerzo de fluencia del material más de 5.2 veces, suficiente para provocar no
solo la deformación permanente sino la ruptura del material y provocar falla mecánica de toda la
estructura. Debido a la magnitud del esfuerzo en la soldadura, es necesario utilizar un tipo de unión
diferente.

16
6.2.3.2. Determinación de esfuerzos para uniones no permanentes
6.2.3.2.1.Selección de los pernos
Se comienza con la selección de unos pernos para la unión de los perfiles disponible en el mercado
colombiano, usando el catálogo de la empresa Redica Ltda [11]. La longitud del tornillo es
fundamental debido a que se debe poder conseguir tornillos mínimo 100 mm requeridos en el
diseño sumado al grosor de la turca y la arandela, tal como se muestra en la Ilustración 19.
Ilustración 19: Longitud del tornillo requerida
Se calcula la fuerza máxima permisible causado por el esfuerzo cortante que puede soportar el
tornillo y basado en este criterio se selecciona un tornillo del estándar métrico.
Se seleccionan tornillos basados en la norma DIN 960 M12 x 110 para la unión de los perfiles
principales y M12 x 100 para la junta de los perfiles principales de recepción de la carga con los
secundarios.
𝐹 = 𝜏𝐴
Ilustración 18: Resultados de la tensión Von Mises para la simulación de la estructura soldada
85 𝑚𝑚 95 𝑚𝑚

17
Donde, 𝐴 es el área transversal del tornillo y se calcula como 𝐴 =𝜋𝐷2
4. Para el tornillo M12
el área será 113.1 𝑚𝑚2.
El esfuerzo cortante máximo para el acero de medio carbono tratado térmicamente, usado en este
tipo de tornillos es 200 MPa [11]
𝐹 = 200(113.1) = 22620 𝑁
La fuerza máxima permisible está por encima de las fuerzas que se están aplicando en el sistema
por lo tanto es posible usar el tornillo M12 sin inconveniente.
La tuerca M12 basada en la norma DIN 934 también está disponible comercialmente en el catálogo
de Redica Ltda.
6.2.3.2.2. Determinación de esfuerzos
Se colocan en total cuatro (4) pernos para soportar la viga principal de transmisión de carga al
elevador y dos (2) que soportan cada viga secundaria como se muestra en la Ilustración 20.
Ilustración 20: Ubicación de los pernos en la estructura

18
La simulación computacional se realiza con la malla mostrada en la Ilustración 21.
Ilustración 21: Enmallado de la simulación de la estructura de la plataforma con pernos
Como se muestra en la Ilustración 22, los esfuerzos que se presentan en la condición crítica son
menores al esfuerzo de fluencia tanto del material de la estructura como la de los pernos. Esto
garantiza que no existirá fallo alguno mediante la utilización de los pernos.
El esfuerzo máximo se presenta en los pernos que unen las vigas principales, sin embargo, se
mantiene un coeficiente de seguridad de 1.23, teniendo en cuenta que se encuentra cargado bajo
la condición crítica, como muestra la Ilustración 23.
Ilustración 22: Esfuerzo Von Mises presente en la estructura con pernos

19
Ilustración 23: Coeficiente de seguridad para los pernos de la estructura
6.3. Ensamble de la plataforma
De los resultados de las simulaciones se concluye que es necesario utilizar uniones no permanentes
evitando concentradores de esfuerzo y facilitando el ensamble de la estructura.
Sobre la plataforma se instala un recubrimiento de goma de 10 𝑚𝑚 de espesor para recubrir la
cabeza de los pernos y generar una superficie completamente lisa.
El resultado final se muestra en la Ilustración 24.
Ilustración 24: Plataforma del dispositivo
20
6.3.1. Simulación de las reacciones en los apoyos para condiciones de
carga críticas
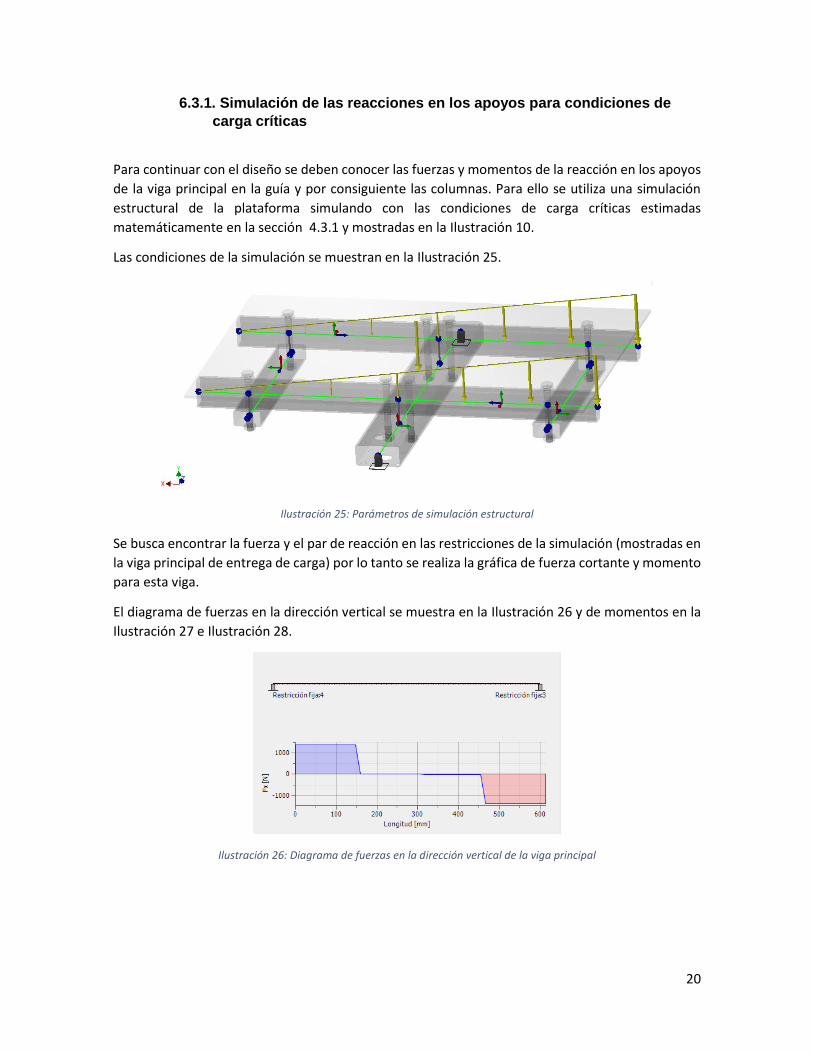
Para continuar con el diseño se deben conocer las fuerzas y momentos de la reacción en los apoyos
de la viga principal en la guía y por consiguiente las columnas. Para ello se utiliza una simulación
estructural de la plataforma simulando con las condiciones de carga críticas estimadas
matemáticamente en la sección 4.3.1 y mostradas en la Ilustración 10.
Las condiciones de la simulación se muestran en la Ilustración 25.
Ilustración 25: Parámetros de simulación estructural
Se busca encontrar la fuerza y el par de reacción en las restricciones de la simulación (mostradas en
la viga principal de entrega de carga) por lo tanto se realiza la gráfica de fuerza cortante y momento
para esta viga.
El diagrama de fuerzas en la dirección vertical se muestra en la Ilustración 26 y de momentos en la
Ilustración 27 e Ilustración 28.
Ilustración 26: Diagrama de fuerzas en la dirección vertical de la viga principal

21
Ilustración 27:Diagrama de momentos en la dirección perpendicular a la fuerza en dirección a la viga
Ilustración 28: Diagrama de momentos en la dirección perpendicular a la fuerza y perpendicular a la viga
Los resultados se resumen en la Tabla 3.
Reacción fija 1 Reacción fija 2
1. Fuerza vertical 1395.7 𝑁 1395.7 𝑁
2. Momento en Y 157.42 𝑁. 𝑚 157.42 𝑁. 𝑚
3. Momento en Z 157.68 𝑁. 𝑚 157.68 𝑁. 𝑚 Tabla 3: Cargas en los soportes de la estructura
7. Diseño de las columnas
Los momentos debidos a la excentricidad en la aplicación de la carga (cuando los tubos no están
alineados con el centro de la plataforma) se trasmiten de la estructura de la plataforma a la guía la
cual está en contacto con las columnas. Esto implica que se debe pensar en una geometría que tenga
buena resistencia a la deflexión, sea compacta para no agregar peso innecesario y pueda ser
conseguida en el mercado o sea de fácil fabricación en la industria colombiana.
7.1. Dimensiones de las columnas
Las columnas tienen una longitud mayor a la del recorrido de la plataforma y diferente entre ellas
debido a que se debe agregar el grosor de la guía, los rodamientos que sostienen los elevadores y
los mecanismos de potencia. Sin embargo, se presenta el proceso de diseño de las columnas para

22
una longitud igual a la de la carrera, 750 𝑚𝑚 (Ver sección 4.2.2). Las dimensiones reales se
muestran en los planos de las columnas
Se requiere el ancho del perfil principal de la estructura de la plataforma, de 80 mm, sea menor al
espacio disponible en la muesca del perfil para que ingrese sin problema. Además, es necesario
instalar una guía al interior de la columna donde se conectará el husillo y rodamientos que
transmitan las cargas.
Para cumplir con los requerimientos, se asigna un factor de 2 al ancho del perfil de la estructura de
la plataforma y con la información disponible en el catálogo de Tubos Colmena S.A.S [12]. para
perfiles en C se selecciona el perfil en C 160 x 60. El grosor del perfil es el mayor disponible para
estas dimensiones; de esta manera se garantiza que el momento de inercia geométrico será el más
alto. Las dimensiones se presentan en la Ilustración 29.
7.2. Material de las columnas
El fabricante permite escoger entre acero de grado 36 y grado 50 además de la posibilidad de
galvanizar el metal.
Para esta aplicación se selecciona el acero de grado 36 galvanizado con el fin de proteger el
dispositivo de la contaminación del sitio de operación y su menor valor comparado con el acero de
grado 50.
El esfuerzo de fluencia de este material es de 253 𝑀𝑃𝑎 [12]
7.3. Análisis computacional de las columnas
Para validar la resistencia de la estructura de columnas se realiza un análisis estructural por
elementos finitos, similar al que se realizó en la sección de la estructura de la plataforma.
Los momentos de reacción en dirección a la viga principal en la estructura de la plataforma (1) son
soportados por la guía y transferidos directamente a la columna, por lo tanto, los resultados
mostrados en la Tabla 3, son las cargas a las que está sometida la columna. Es importante notar que
la fuerza vertical (3) y el momento perpendicular a la viga (2) no son transferidos a la columna sino
al husillo, aunque también se transmita a través de la guía. La Ilustración 30 muestra las cargas
utilizadas para la simulación.
Ilustración 29: Dimensiones del perfil C de las columnas
80 𝑚𝑚
60 𝑚𝑚
15 𝑚𝑚
2.3 𝑚𝑚
160 𝑚𝑚
𝑥
𝑧

23
Con la simulación se espera obtener los máximos valores de carga en la reacción tanto en la base de
la columna, en la base del husillo y en la platina superior. Esto permite diseñar las juntas del elevador
con la mesa móvil y seleccionar los rodamientos requeridos en los husillos.
Se varía la posición de las cargas, simulando las diferentes posiciones de la plataforma en el elevador
desde 30 𝑚𝑚 hasta 730 𝑚𝑚. Los resultados se muestran en anexos resultados reacciones columna
y husillo.
Los valores máximos para cada carga se muestran en la Tabla 4, y se aplica un factor de seguridad
de 1.2 (carga de diseño).
Distancia Máximos Carga de Diseño (F.S.=1.2)
Reacción Columna
𝐹𝑥 (𝑁) 59.695 71.634
𝐹𝑦 (𝑁) 733.463 880.1556
𝐹𝑧 (𝑁) 0.895 1.074
𝑀𝑥 (𝑁 𝑚𝑚) -157090 -188508
𝑀𝑦 (𝑁 𝑚𝑚) 0 0
𝑀𝑧 (𝑁 𝑚𝑚) 14908.77 17890.52
Reacción Husillo
𝐹𝑥 (𝑁) -34.548 -41.4576
𝐹𝑦 (𝑁) -0.115 -0.138
𝐹𝑧 (𝑁) 1353.192 1623.83
𝑀𝑥 (𝑁 𝑚𝑚) 586.153 703.3836
𝑀𝑦 (𝑁 𝑚𝑚) 136839 164206.8
𝑀𝑧 (𝑁 𝑚𝑚) 0 0
Reacción Soportes Superiores Husillo
𝐹𝑥 (𝑁) 0 0
𝐹𝑦 (𝑁) 0 0
𝐹𝑧 (𝑁) 266.461 319.7532
𝑀𝑥 (𝑁 𝑚𝑚) 33.85 40.62
𝑀𝑦 (𝑁 𝑚𝑚) 411167.3 493400.8
𝑀𝑧 (𝑁 𝑚𝑚) 0 0
Tabla 4: Valores de carga máximos para las reacciones de la columna y husillos
1
1
2
2
3
3
Reacción de la columna
Reacción de los husillos inferior
Reacción de los husillos superior
Ilustración 30: Cargas en las columnas y husillos

24
8. Diseño del mecanismo elevador
El mecanismo elevador es el fundamento de este diseño. Se contempló el uso de diferentes
alternativas evaluando las ventajas y desventajas mostradas en el marco teórico (Sección 2.2).
El sistema que mejor se ajusta a los requerimientos son los sistemas de tornillo sin fin o de potencia,
los cuales no requieren de sistemas mecánicos complejos, piezas adicionales ni costos excesivos.
De estos sistemas se tienen dos opciones, utilizar husillo trapezoidal con la ventaja de ser económico
y simple mecánicamente, o la posibilidad de utilizar un husillo de bolas con la ventaja de ser más
eficiente y reducir la fricción en el contacto del paso del tornillo. En este capítulo se presenta la
selección del husillo requerido tanto trapezoidal como de bolas y posteriormente se comparan los
resultados para realizar la elección del sistema elevador.
8.1. Análisis de las condiciones cinemáticas y de carga de los husillos
Las condiciones dinámicas se calculan una a una en cada etapa del movimiento del mecanismo y
se ilustran en el Gráfico 2.
La velocidad de diseño máxima es 𝑉𝑚𝑎𝑥 = 1𝑚
𝑚𝑖𝑛= 0.017
𝑚
𝑠 y el tiempo de aceleración y
desaceleración es de 1 𝑠. Por lo tanto, la aceleración 𝑎 = 0.017𝑚
𝑠2. La fuerza de fricción se calcula
con el coeficiente de fricción debido al contacto de los rodamientos que se encuentran en el
mecanismo guía con la columna.
Gráfico 2: Velocidad del mecanismo en función del tiempo
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
0 10 20 30 40 50 60 70
Vel
oci
dad
(m
/s)
Tiempo (s)
Etapa1: Movimiento uniformemente acelerado hacia arriba
Etapa 2: Movimiento a velocidad constante hacia arriba
Etapa 3: Movimiento uniformemente desacelerado hacia arriba
Etapa 4: Movimiento uniformemente acelerado hacia abajo
Etapa 5: Movimiento a velocidad constante
Estapa 6: Movimiento uniformemente desacelerado hacia abajo

25
La Ilustración 31 muestra el diagrama de cuerpo libre para el mecanismo del elevador en
condiciones dinámicas.
Conociendo los valores de la reacción de la plataforma sobre el elevador, mostrado en Tabla 3, se
analizan las condiciones de carga dinámicas del husillo con las cuales se realiza la selección.
La fuerza 𝐹 será la fuerza axial recibida por el husillo igual a la fuerza de reacción vertical de la
plataforma.
𝑊 = 1395.7 𝑁
La masa considerada en la ecuación es la suma de la masa de la plataforma junto con la carga de
tubos que se está transportando (ver anexo: masa de las piezas)
𝑚 = 162.42 𝐾𝑔
Intervalo (s) Ecuación Fuerza axial resultante 𝑃 (N)
Etapa 1 𝑃 = 𝑊 + 𝑓 + 𝑚𝑎 1454.24
Etapa 2 𝑃 = 𝑊 + 𝑓 1451.53
Etapa 3 𝑃 = 𝑊 + 𝑓 − 𝑚𝑎 1448.82
Etapa 4 𝑃 = 𝑊 − 𝑓 − 𝑚𝑎 1337.17
Etapa 5 𝑃 = 𝑊 − 𝑓 1339.87
Etapa 6 𝑃 = 𝑊 − 𝑓 + 𝑚𝑎 1342.58
Tabla 5: Ecuaciones en cada etapa del movimiento y fuerza axial
La fuerza axial máxima será, entonces, 1454.24 𝑁 en el movimiento hacia arriba uniformemente
acelerado.
𝑣, 𝑎 𝑓
𝑃
0.75 m
Ilustración 31: Diagrama de cuerpo libre dinámico del mecanismo. Etapa 4

26
8.2. Selección de los husillos
Los husillos que se seleccionan para el proyecto son fabricados por la empresa THK. Los cálculos de
selección y vida útil son basados en los catálogos del fabricante, basados en sus propios ensayos de
laboratorio y criterios de diseño.
8.2.1. Husillo trapezoidal
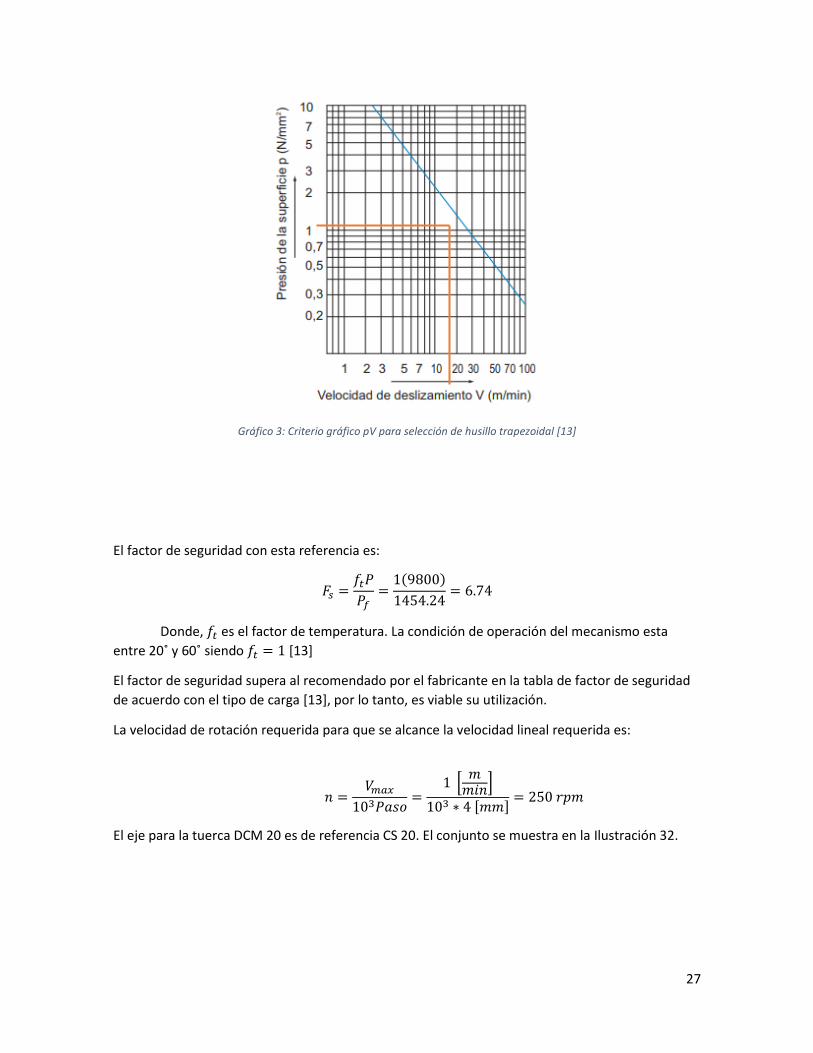
Para seleccionar el husillo tipo trapezoidal se requiere de analizar cada modelo de acuerdo con el
criterio gráfico del fabricante.
Se necesita conocer el valor pV, que es el producto de la presión de superficie de contacto y
velocidad de deslizamiento. De acuerdo con este valor se establece la selección de la tuerca para el
husillo. Este criterio establece el nivel de desgaste que puede sufrir un husillo si se selecciona
incorrectamente.
𝑝 =𝑃𝑓
𝑃∗ 9.8
𝑉 = 𝜋 ∗𝐷0 ∗ 𝑛
103cos 𝛼
Donde, 𝑝 es la presión de la superficie de contacto, 𝑃𝑓 es la carga axial, 𝑃 es el
empuje dinámico admisible. 𝑉 es la velocidad de deslizamiento en los dientes,
calculada con los valores del ángulo de paso 𝛼, es el diámetro efectivo 𝐷0 y las
revoluciones por minuto del husillo 𝑛.
La velocidad angular del husillo se determina con el paso del tornillo y la velocidad lineal que se
requiere:
𝑛 =𝑉𝑚𝑎𝑥
103 ∗ 𝑃𝑎𝑠𝑜
La iteración se realiza con los modelos desde diámetro de 12 𝑚𝑚 hasta 36 𝑚𝑚 validando que en
el Gráfico 3, que el punto de corte de los valores pV se encuentre por debajo de la cota azul y lo
más cercana a ésta.
Para el modelo de husillo DCM 20 se tienen los siguientes parámetros:
THK 𝐷𝑒𝑥𝑡𝑒𝑟𝑛𝑜 (mm)
𝑃𝑎𝑑𝑚𝑖𝑠𝑖𝑏𝑙𝑒 (N)
𝐷0 (mm)
Paso (mm)
Angulo paso
(Grados)
DCM 20 20 9800 18 4 4.05 Tabla 6: Parámetros del husillo Trapezoidal THK DCM 20 [13]
Por lo tanto, 𝑝 = 1.45 y 𝑉 = 14.17
27
Gráfico 3: Criterio gráfico pV para selección de husillo trapezoidal [13]
El factor de seguridad con esta referencia es:
𝐹𝑠 =𝑓𝑡𝑃
𝑃𝑓=
1(9800)
1454.24= 6.74
Donde, 𝑓𝑡 es el factor de temperatura. La condición de operación del mecanismo esta
entre 20˚ y 60˚ siendo 𝑓𝑡 = 1 [13]
El factor de seguridad supera al recomendado por el fabricante en la tabla de factor de seguridad
de acuerdo con el tipo de carga [13], por lo tanto, es viable su utilización.
La velocidad de rotación requerida para que se alcance la velocidad lineal requerida es:
𝑛 =𝑉𝑚𝑎𝑥
103𝑃𝑎𝑠𝑜=
1 [𝑚
𝑚𝑖𝑛]
103 ∗ 4 [𝑚𝑚]= 250 𝑟𝑝𝑚
El eje para la tuerca DCM 20 es de referencia CS 20. El conjunto se muestra en la Ilustración 32.

28
Ilustración 32: Mecanismo elevador tornillo trapezoidal
8.2.2. Husillo de bolas
8.2.2.1. Precisión Requerida
La aplicación de los husillos en el diseño no requiere de una precisión elevada, por lo tanto, de
acuerdo con la Tabla 7, se establece que la precisión requerida puede ser C10
(0.21mm/300mm). Los husillos de bola laminados son de menor costo.
Tabla 7: Precisión del ángulo de paso [14]

29
8.2.2.2. Paso requerido
Se busca que, con baja velocidad angular, se alcance la longitud de la carrera en poco tiempo, por
lo que un criterio importante de la selección del husillo es el paso.
La fuente motriz del movimiento será una manivela operada manualmente por una persona por lo
que la velocidad de rotación que se alcanza es muy baja. Se toma una velocidad de rotación de 50
rpm como velocidad de rotación para el diseño.
El paso se calcula como:
𝑃𝑎𝑠𝑜 =𝑉𝑚𝑎𝑥 ∗ 60
𝑛 ∗ 10−3
Siendo 𝑉𝑚𝑎𝑥 en 𝑚/𝑠, 𝑛 es la velocidad de rotación en 𝑟𝑝𝑚
𝑃𝑎𝑠𝑜 =0.017 ∗ 60
50 ∗ 10−3= 20.4 𝑚𝑚
Por lo tanto, el paso requerido en el husillo es de 20 mm
8.2.2.3. Longitud del eje
La carrera es de 0.75 metros, sin embargo, el eje debe ser mucho mayor debido a que en este se
ubican los componentes mecánicos (las poleas, engranajes, rodamientos), además de permitir un
huelgo entre la plataforma y el tope superior e inferior.
La longitud del eje motriz es de 1175 𝑚𝑚 mientras que la del eje conducido es de 1125 𝑚𝑚, por
lo tanto, para el diseño del elevador se asigna un valor de longitud de 1200 𝑚𝑚.
8.2.2.4. Diámetro del eje
El diámetro se selecciona basado en la disponibilidad del husillo con el paso requerido, el tipo
requerido, la precisión y la longitud del eje. La Tabla 8 muestra los valores del fabricante
Tabla 8: Longitud máxima del husillo por nivel de precisión [14]

30
Para el nivel de precisión C10, el eje laminado de diámetro de 14 a 15 mm cumple con el
requerimiento de longitud total de mínimo 1.2 m
Los ejes que cumplen con el paso requerido y el diámetro hallado en el punto anterior se seleccionan
con la Tabla 9, teniendo en cuenta si se encuentran estandarizados, semi normalizados o se requiere
fabricación de la pieza.
El husillo que cumple la condición de paso de 20 𝑚𝑚 es de diámetro 15 𝑚𝑚 o 20 𝑚𝑚, además de
estar estandarizado y normalizado en el almacén.
Tabla 9: Combinaciones estándar del diámetro de eje y paso del husillo de bolas laminado [14]
8.2.2.5. Selección del modelo del husillo
El modelo se selecciona basado en las características de los diferentes husillos que el
fabricante ofrece. Conociendo que se requiriere un modelo de husillo laminado, de
combinación tuerca de husillo de bolas y eje, se puede reducir la cantidad de opciones
disponibles a las que se muestran en la Tabla 10:
Tabla 10: Tipos de husillo de bolas laminados [14]

31
Modelos:
• JPF
• BTK-V
• MTF
• WHF
• BLK
• WTF
• CNF
• BNT
El modelo que mejor se ajusta a la aplicación de este diseño es el BLK debido a sus
características generales, además de que sus dimensiones se ajustan al espacio disponible
en la guía y las columnas. Otro factor importante es su menor costo con respecto al modelo
WTF, el cual también cumplía con los requerimientos.
8.2.2.6. Referencia del husillo
El fabricante ofrece dos referencias mostradas en la Tabla 10 que cumplen con las características
requeridas con el modelo BLK. Con diámetro de 20 mm se ofrece un paso de 20 mm, la longitud del
eje de 1.5 m y la diferencia radica en la cantidad de hileras que tienen las bolas para circular
permitiendo más capacidad de carga básica en uno que en el otro.
Tabla 11: Referencias del husillo de bolas modelo BLK [14]
8.2.2.7. Carga axial permisible
Para realizar los cálculos de carga permisible se requiere el diámetro de rosca menor por lo
tanto se usa el valor de 17.5 𝑚𝑚 obtenido de Tabla 11. Es de notar que los diámetros de
ambos tornillos que se están analizando son iguales.

32
• Carga máxima por pandeo del eje
Para calcular la carga máxima admisible para evitar pandeo en el eje se utiliza la Ecuación 1: Fuerza
crítica de pandeo. Esta ecuación tiene en cuenta el módulo de Young del material del eje, el
momento de inercia de éste, distancia entre los dos soportes y un factor de instalación que se
selecciona de acuerdo con el tipo de fijación del eje en el sistema.
La distancia entre soportes será aproximadamente igual a la longitud del eje 𝑙𝑒𝑗𝑒 = 1200 𝑚𝑚
El módulo de Young del material del fabricante es 206 𝐺𝑃𝑎. [14]
El momento de inercia es 𝐼 =𝜋
64𝑑4.
La unión es fija – soporte debido a la configuración del sistema en los elevadores. En la parte inferior
será unión con la plataforma y en la parte superior el husillo está unido a un soporte que junta
ambos ejes. El valor del factor de fijación para fijo – soporte es 𝛼 = 0.7.
𝐹𝑝𝑎𝑛𝑑𝑒𝑜 =𝜋2𝐸𝐼
(𝛼𝑙)2
Ecuación 1: Fuerza crítica de pandeo
Por lo tanto, la fuerza axial critica para pandeo del eje es 𝐹𝑝𝑎𝑛𝑑𝑒𝑜 = 13265.71 𝑁
• Carga máxima por compresión
Utilizando la Ecuación 2: Fuerza para fluencia se calcula la carga máxima para deformación por
tracción o compresión. Se debe tener en cuenta el esfuerzo de fluencia del material 𝜎 = 147 𝑀𝑃𝑎
[14] y el diámetro de rosca menor.
𝜎 =𝐹
𝐴→ 𝐹𝑓𝑙𝑢𝑒𝑛𝑐𝑖𝑎 = 𝜎𝑓𝑙𝑢𝑒𝑛𝑐𝑖𝑎𝐴 = 𝜎𝑓𝑙𝑢𝑒𝑛𝑐𝑖𝑎
𝜋𝑑2
4
Ecuación 2: Fuerza para fluencia
La carga máxima por compresión y tracción es 𝐹𝑓𝑙𝑢𝑒𝑛𝑐𝑖𝑎 = 35357.64 𝑁
• Carga máxima permisible debido a la capacidad del husillo.
Para este análisis, la aceleración será asumida como un impacto en el husillo, por lo tanto, se debe
contemplar un factor de seguridad estático. La Tabla 12 dada por el fabricante muestra los factores
de seguridad que se deben escoger de acuerdo con las condiciones de carga.

33
Tabla 12: Factor de seguridad estático debido a las condiciones de carga [14]
El elevador se puede considerar maquinaria industrial general y debido a la aceleración a la que se
somete, la condición será con vibración o impacto. El factor de seguridad que se selecciona es 𝑓𝑠 =3.
Las dos referencias que se están enfrentando presentan capacidades de carga diferentes. En la Tabla
13 se muestra el valor de la carga máxima por capacidad de carga para las dos referencias.
Referencia Capacidad de carga 𝑪𝒐𝒂 (kN) Máxima carga permitida (kN)
BLK 2020-3,6 22.3 7.43
BLK 2020-7,2 44.6 14.87 Tabla 13: Carga máxima permitida para los modelos enfrentados
8.2.2.8. Selección de la referencia del husillo
La fuerza axial máxima requerida es menor en todos los casos a la permisible por lo tanto
los husillos de bolas de las referencias enfrentadas son funcionales para el elevador.
El criterio de selección será la capacidad de carga. La fuerza máxima requerida es de 𝐹max 𝑟𝑒𝑞 = 1454.24 𝑁 la cual está por debajo de la máxima carga permitida por el husillo con dos
circuitos de bolas 𝐹max 𝑝𝑒𝑟𝑚 = 7433 referencia BLK 2020-3,6 por lo tanto se selecciona este modelo
de husillo.

34
Ilustración 33: Mecanismo elevador con husillo de bolas
En la Ilustración 33, se muestra el elevador instalado con husillo de bolas.
8.2.2.9. Vida útil del husillo
El husillo de bolas llega al final de su vida útil cuando se presenta descascarillado presentado por la
fatiga generando escamas en la superficie. El fabricante provee Ecuación 3 basada en el análisis
estadístico y pruebas con husillos de bolas en las mismas condiciones.
L = (Ca
𝑓𝑤𝐹𝑝𝑟𝑜𝑚)
3
𝑥106 [14]
Ecuación 3: Vida útil de un husillo de bolas
Donde 𝐿 es la cantidad de revoluciones antes de la falla, 𝐶𝑎 es la carga dinámica para el
modelo (Tabla 11), 𝐹𝑝𝑟𝑜𝑚 es la carga axial promedio y 𝑓𝑤 es el factor de carga dado por el
fabricante en la Tabla 14.
Tabla 14: Factor de carga de un husillo de bolas [14]

35
La velocidad máxima del husillo es de 𝑉𝑚𝑎𝑥 = 0.017𝑚
𝑠, lo que según la Tabla 14, el factor de carga
será 1.2
La fuerza axial promedio se calcula teniendo en cuenta la carrera que recorre el husillo en los
intervalos de tiempo en que se aplica esta fuerza por ciclo.
𝐹𝑝𝑟𝑜𝑚 = √1
2 ∗ 𝑙𝑐𝑎𝑟𝑟𝑒𝑟𝑎
(𝐹13𝑙1 + 𝐹2
3𝑙2 + ⋯ . +𝐹63𝑙6)
3
Ecuación 4: Fuerza axial promedio en el ciclo
La longitud recorrida por el husillo en el intervalo de tiempo se calcula con la velocidad del husillo y
los tiempos de aceleración, mediante las relaciones de movimiento uniformemente acelerado y
movimiento uniforme. Aplicando la Ecuación 4 la fuerza promedio será:
Etapa del movimiento Fuerza requerida (N) Longitud recorrida (m) 𝑭𝟑𝒍
Aceleración movimiento +y 1454.24 0.0083 2.56E+07
Velocidad constante +y 1451.53 0.4833 1.48E+09
Desaceleración movimiento +y
1448.82 0.0083 2.53E+07
Aceleración movimiento -y 1337.17 0.0083 1.99E+07
Velocidad constante -y 1339.87 0.4833 1.16E+09
Desaceleración movimiento -y
1342.58 0.0083 2.02E+07
∑ 𝐹𝑖
3𝑙𝑖 2.73E+09
𝐹𝑝𝑟𝑜𝑚 1044.11 Tabla 15: Fuerza axial promedio
Usando la Ecuación 3: Vida útil de un husillo de bolas se calcula la vida útil:
𝐿 = (7700
1.2 ∗ 1044.11)
3
𝑥106 = 2.32𝑥108 𝑟𝑒𝑣
Es decir, el número de ciclos que puede realizar será
𝑛 =𝐿 ∗ 𝑃𝑎𝑠𝑜
2 ∗ 𝑙𝑐𝑎𝑟𝑟𝑒𝑟𝑎=
2.32𝑥108 ∗ 20
2 ∗ 1200 = 1.93𝑥106 𝑐𝑖𝑐𝑙𝑜𝑠
8.3. Torque y potencia requeridos en los husillos
Para seleccionar el tipo de husillo con el que operará el dispositivo, es necesario calcular el torque
y la potencia requerido en cada uno y compararlos.
El par de torsión varía de acuerdo con la etapa de movimiento donde se encuentre el husillo (Gráfico
2). Cuando existe aceleración se debe calcular el par requerido para la aceleración con la Ecuación
5: Par de torsión para la aceleración y sumarlo o restarlo al par requerido a velocidad constante.

36
𝑇𝑎𝑐𝑒𝑙 = 𝐽𝜔′
Ecuación 5: Par de torsión para la aceleración
La aceleración angular se calcula como:
𝜔′ =2𝜋(𝑛)
60𝑡
Donde, n es la velocidad de rotación en 𝑟𝑝𝑚 y 𝑡 es el tiempo de aceleración
8.3.1. Torque y potencia para el Husillo de bolas
Para calcular el par para la aceleración se requiere el momento de inercia del eje, el momento de
inercia de las poleas, los engranajes y la inercia por la masa transferida:
𝐽𝑒𝑗𝑒 se obtiene del catálogo general de THK para la referencia BLK 2020-3,6.
𝐽𝑒𝑗𝑒 = 1.23𝑥10−3 𝐾𝑔 ∙ 𝑐𝑚2
𝑚𝑚∗ (1200 𝑚𝑚) = 1.476𝑥10−4 𝐾𝑔 ∙ 𝑚2
𝐽𝑝𝑜𝑙𝑒𝑎 y 𝐽𝑒𝑛𝑔𝑟𝑎𝑛𝑎𝑗𝑒𝑠 se consideran iguales y son calculados por el software de diseño Inventor.
El momento de inercia total es:
𝐽 = (𝑚) (𝑃𝑎𝑠𝑜
2𝜋)
2+ 𝐽𝑒𝑗𝑒 + 𝐽𝑝𝑜𝑙𝑒𝑎 + 𝐽𝑒𝑛𝑔𝑟𝑎𝑛𝑎𝑗𝑒𝑠 [14]
𝐽 = 162.42 [𝐾𝑔] (0.02[𝑚𝑚]
2𝜋)
2
+ 1.476𝑥10−4 [𝐾𝑔 ∙ 𝑚2] + 2 (5.671𝑥10−4) [𝐾𝑔 ∙ 𝑚2]
𝐽 = 2.926𝑥10−3 𝐾𝑔 ∙ 𝑚2
La velocidad de rotación usando husillo de bolas es 𝜔 = 50 𝑟𝑝𝑚 = 5.24𝑟𝑎𝑑
𝑠 (Sección 8.2.2.2) por lo
que la aceleración angular es:
𝜔′ =2𝜋(50)
60(1)= 5.24
𝑟𝑎𝑑
𝑠2
El torque para la aceleración será 𝑇𝑎𝑐𝑒𝑙 = 2.926𝑥10−3 (5.24) = 0.015 𝑁 ∙ 𝑚
El torque para velocidad constante se calcula como:
𝑇𝑐𝑡𝑒 =𝑃(𝑃𝑎𝑠𝑜)
2𝜋𝜂
Donde 𝑃 es la fuerza axial resultante (sección 8.1) y 𝜂 = 95% [14] es la eficiencia del husillo
de bolas.
Por último, la potencia por husillo se calcula como 𝑃𝑜𝑡 = 𝑇𝑡𝑜𝑡𝑎𝑙𝜔

37
El Torque requerido total y la potencia en el husillo de bolas, para cada etapa del movimiento, se
muestra en la Tabla 16.
Etapa del movimiento Ecuación Torque Requerido (𝑵 ∙ 𝒎)
Potencia requerida (W)
Aceleración movimiento +y 𝑇𝑐𝑡𝑒1+ 𝑇𝑎𝑐𝑒𝑙 4.88 25.55
Velocidad constante +y 𝑇𝑐𝑡𝑒1 4.86 25.47
Desaceleración movimiento +y
𝑇𝑐𝑡𝑒1− 𝑇𝑎𝑐𝑒𝑙
4.85 25.39
Aceleración movimiento -y 𝑇𝑐𝑡𝑒2− 𝑇𝑎𝑐𝑒𝑙 4.47 23.43
Velocidad constante -y 𝑇𝑐𝑡𝑒2 4.49 23.51
Desaceleración movimiento -y 𝑇𝑐𝑡𝑒2+𝑇𝑎𝑐𝑒𝑙 4.50 23.59
Tabla 16: Torque y potencia requeridos en el husillo de bolas
8.3.2. Torque y potencia para el Husillo trapezoidal
El procedimiento es similar al seguido en el análisis de torque y potencia para el husillo de bolas.
El momento de inercia para el eje trapezoidal no se entrega en el catálogo por lo que se calcula
como:
𝐽𝑒𝑗𝑒 =1
2𝑀𝐿𝑅2 =
1
2(2)(1.2)(0.01)2 = 1.2𝑥10−4 𝐾𝑔 ∙ 𝑚2
Donde 𝑀 = 2𝐾𝑔
𝑚, obtenido del catálogo de husillos trapezoidales de THK [13] y 𝑅 = 0.01 𝑚 (Tabla
6) es el radio del husillo.
𝐽𝑒𝑛𝑔𝑟𝑎𝑛𝑎𝑗𝑒𝑠 y 𝐽𝑝𝑜𝑙𝑒𝑎𝑠 se consideran iguales a los de la sección anterior. Por lo tanto, el momento de
inercia total es:
𝐽 = 1.347𝑥10−3 𝐾𝑔 ∙ 𝑚2
En este caso, la velocidad angular es 𝑛 = 250 𝑟𝑝𝑚 = 26.18𝑟𝑎𝑑
𝑠 y la aceleración angular 26.18
𝑟𝑎𝑑
𝑠2
El torque requerido para la aceleración es 𝑇𝑎𝑐𝑒𝑙 = 0.035 𝑁 ∙ 𝑚
El torque para velocidad constante se calcula como:
𝑇𝑐𝑡𝑒 =𝑃(𝑃𝑎𝑠𝑜)
2𝜋𝜂
Donde 𝑃 es la fuerza axial resultante (sección 8.1) y 𝜂 = 25.7% [13] es la eficiencia del
husillo trapezoidal.
La potencia por husillo se calcula como 𝑃𝑜𝑡 = 𝑇𝑡𝑜𝑡𝑎𝑙𝜔. En este caso la velocidad es mucho mayor
por lo que la potencia también lo será.
El Torque requerido total y la potencia en el husillo es:

38
Etapa del movimiento Ecuación Torque Requerido (𝑵 ∙ 𝒎)
Potencia requerida (W)
Aceleración movimiento +y 𝑇𝑐𝑡𝑒1+ 𝑇𝑎𝑐𝑒𝑙 3.63 95.06
Velocidad constante +y 𝑇𝑐𝑡𝑒1 3.60 94.13
Desaceleración movimiento +y
𝑇𝑐𝑡𝑒1− 𝑇𝑎𝑐𝑒𝑙
3.56 93.21
Aceleración movimiento -y 𝑇𝑐𝑡𝑒2− 𝑇𝑎𝑐𝑒𝑙 3.28 85.97
Velocidad constante -y 𝑇𝑐𝑡𝑒2 3.32 86.89
Desaceleración movimiento -y 𝑇𝑐𝑡𝑒2+𝑇𝑎𝑐𝑒𝑙 3.35 87.82
Tabla 17: Torque y potencia requeridos en el husillo trapezoidal
8.4. Selección del husillo
El requerimiento principal del diseño es que el mecanismo sea manipulado por una persona
manualmente. Esto implica que la fuerza que ejerza la persona sea razonablemente pequeña y se
pueda hacer ergonómicamente.
Las condiciones de operación para una persona se estiman en hacer girar a 25 revoluciones por
minuto un volante de radio 𝑟 = 20 𝑐𝑚 = 0.2 𝑚 como manivela con el fin de tener 2 puntos de
aplicación de la fuerza, similar a los utilizados en los automóviles, como se muestra en la Ilustración
34
𝐹 =𝑇
𝑟=
𝑃𝑜𝑡
𝜔𝑟
A una velocidad angular de 𝜔 = 25 𝑟𝑝𝑚 = 2.62𝑟𝑎𝑑
𝑠 se requiere:
Potencia requerida Máxima (W)
Fuerza requerida por el operario (N)
Fuerza requerida por el operario (kgf)
Husillo trapezoidal 95.06 181.42 18.52
Husillo de Bolas 25.55 48.76 4.98 Tabla 18: Fuerza requerida por el operario
400 𝑚𝑚
𝐹
𝐹
Ilustración 34: Volante requerido

39
El análisis se realiza para un husillo, sin embargo, se deben usar dos en el elevador conectados por
una polea de transmisión. Por lo tanto, estos valores deben ser duplicados.
Debido a que no es físicamente conveniente para una persona promedio realizar una fuerza de
37.04 𝐾𝑔𝑓 requeridos en los husillos trapezoidales, durante cerca de 1 minuto, se debe utilizar el
husillo de bolas.
Finalmente, el operario deberá realizar una fuerza de 9.96 𝐾𝑔𝑓 sobre la manivela para poder
levantar la carga en el elevador.
8.5. Soportes en los extremos del eje.
El tipo de unión de los extremos de los ejes es Fijo – Soporte.
En la terminación inferior del eje se debe instalar un soporte fijo, el cual está unido a la mesa móvil
y en la terminación superior, se debe instalar un soporte simple, como se muestra en la Ilustración
35 y Ilustración 36.
Ilustración 35: Soporte de los ejes superior
Ilustración 36: Soporte Fijo para ejes
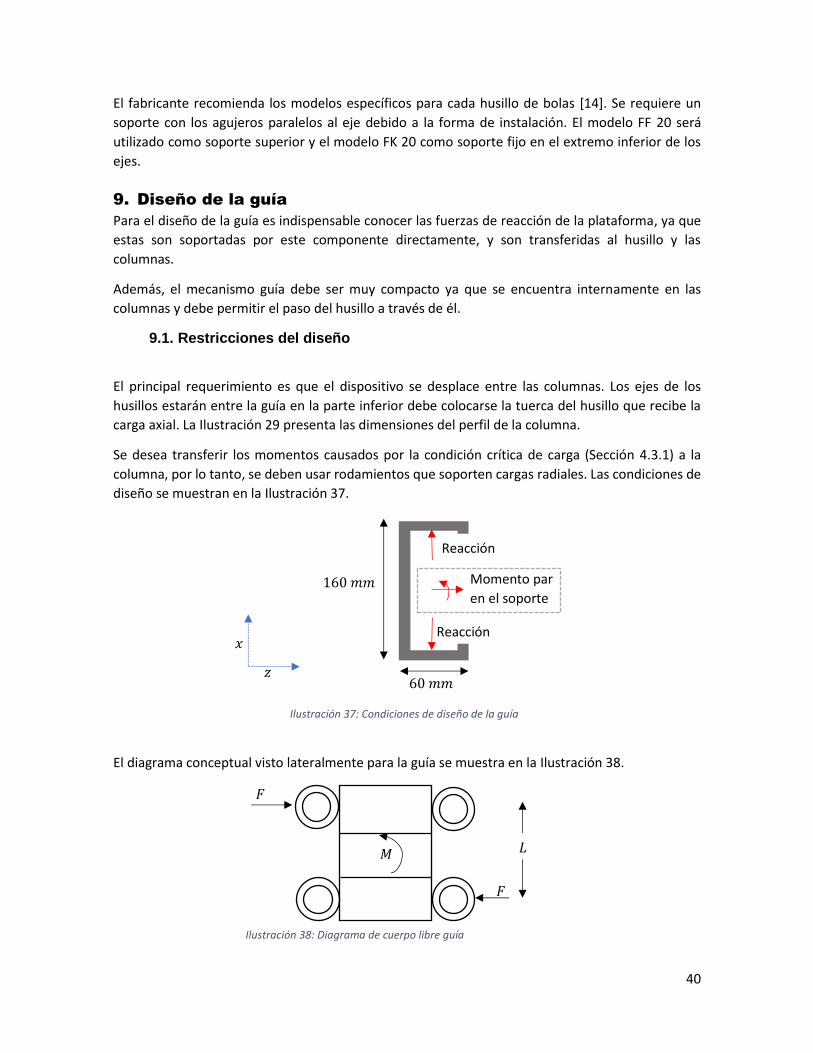
40
El fabricante recomienda los modelos específicos para cada husillo de bolas [14]. Se requiere un
soporte con los agujeros paralelos al eje debido a la forma de instalación. El modelo FF 20 será
utilizado como soporte superior y el modelo FK 20 como soporte fijo en el extremo inferior de los
ejes.
9. Diseño de la guía
Para el diseño de la guía es indispensable conocer las fuerzas de reacción de la plataforma, ya que
estas son soportadas por este componente directamente, y son transferidas al husillo y las
columnas.
Además, el mecanismo guía debe ser muy compacto ya que se encuentra internamente en las
columnas y debe permitir el paso del husillo a través de él.
9.1. Restricciones del diseño
El principal requerimiento es que el dispositivo se desplace entre las columnas. Los ejes de los
husillos estarán entre la guía en la parte inferior debe colocarse la tuerca del husillo que recibe la
carga axial. La Ilustración 29 presenta las dimensiones del perfil de la columna.
Se desea transferir los momentos causados por la condición crítica de carga (Sección 4.3.1) a la
columna, por lo tanto, se deben usar rodamientos que soporten cargas radiales. Las condiciones de
diseño se muestran en la Ilustración 37.
El diagrama conceptual visto lateralmente para la guía se muestra en la Ilustración 38.
𝑀 = 𝐹𝐿
60 𝑚𝑚
160 𝑚𝑚
𝑥
𝑧
Momento par
en el soporte
Reacción
Reacción
Ilustración 37: Condiciones de diseño de la guía
𝑀
𝐹
𝐹
𝐿
Ilustración 38: Diagrama de cuerpo libre guía

41
El momento par 𝑀 es conocido de la simulación de estructural mostrado en la Tabla 3.
𝑀 = 𝑀𝑧 = 157.68 𝑁 ∙ 𝑚
𝐹 =𝑀
𝐿
La fuerza de reacción es inversamente proporcional a la longitud de la guía por lo tanto es
conveniente que la longitud sea lo más generosa posible.
Como se muestra en la Ilustración 38, se muestra una división de tres (3) secciones: en la sección
inferior, se coloca el husillo de bolas, por lo que en esta sección se diseña un alojamiento para la
pieza. La sección media es la estructura de la plataforma soportada en forma de “sándwich” por la
sección superior. Los pernos que aseguran la guía atraviesan las tres secciones, por lo tanto, un
limitante para la longitud de la guía es la longitud máxima de los tornillos comerciales.
La longitud final 𝐿 se establece en 73 mm, por lo que la fuerza de reacción es 2160 𝑁.
9.2. Geometría de la guía
La variación entre la sección superior y la inferior radica en el alojamiento del husillo. Por ello la
sección inferior es de un grosor mayor. El material utilizado es acero inoxidable austenítico 304
debido a sus propiedades contra la corrosión, siendo este un requerimiento de diseño.
En la Ilustración 39 se presentan los componentes de la guía inferior y las dimensiones se muestran
en los planos 9 para la sección inferior y 10 para la sección superior.
Alojamiento de
la tuerca del
husillo
Ilustración 39: Componentes de la guía
Eje del
rodamiento
Perforación para el
paso del eje del
Perforación para el
paso de los pernos
Alojamiento de
los rodamientos
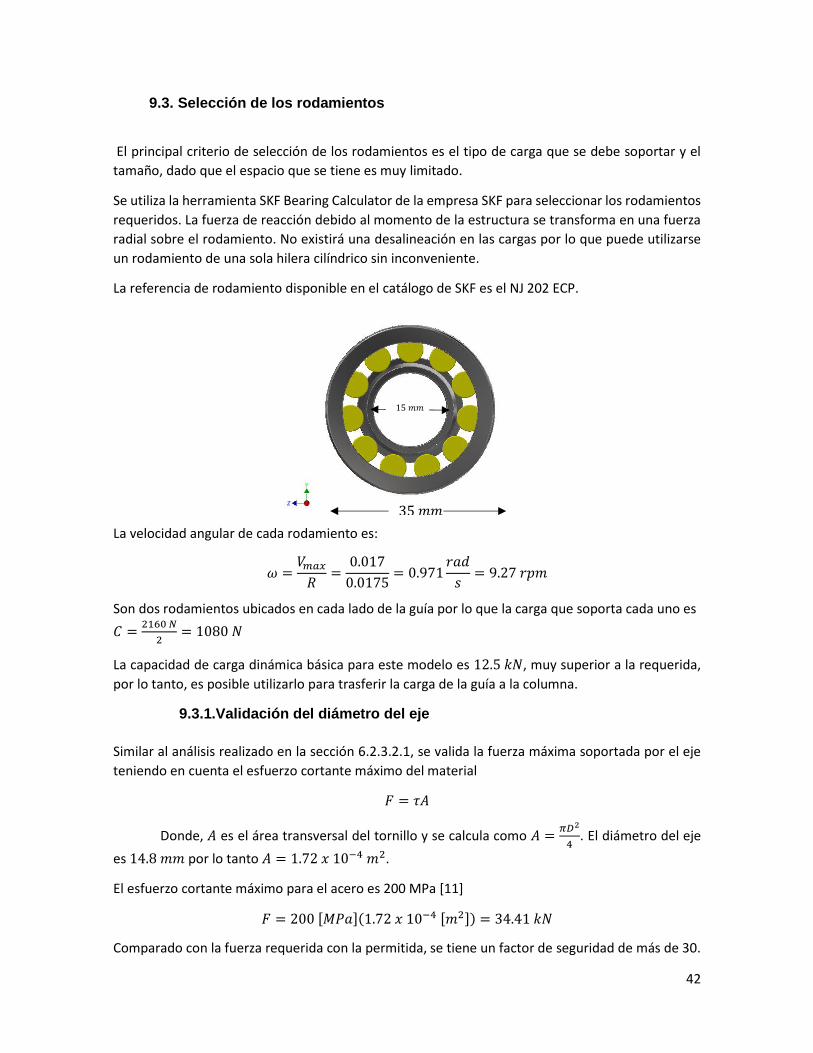
42
9.3. Selección de los rodamientos
El principal criterio de selección de los rodamientos es el tipo de carga que se debe soportar y el
tamaño, dado que el espacio que se tiene es muy limitado.
Se utiliza la herramienta SKF Bearing Calculator de la empresa SKF para seleccionar los rodamientos
requeridos. La fuerza de reacción debido al momento de la estructura se transforma en una fuerza
radial sobre el rodamiento. No existirá una desalineación en las cargas por lo que puede utilizarse
un rodamiento de una sola hilera cilíndrico sin inconveniente.
La referencia de rodamiento disponible en el catálogo de SKF es el NJ 202 ECP.
La velocidad angular de cada rodamiento es:
𝜔 =𝑉𝑚𝑎𝑥
𝑅=
0.017
0.0175= 0.971
𝑟𝑎𝑑
𝑠= 9.27 𝑟𝑝𝑚
Son dos rodamientos ubicados en cada lado de la guía por lo que la carga que soporta cada uno es
𝐶 =2160 𝑁
2= 1080 𝑁
La capacidad de carga dinámica básica para este modelo es 12.5 𝑘𝑁, muy superior a la requerida,
por lo tanto, es posible utilizarlo para trasferir la carga de la guía a la columna.
9.3.1.Validación del diámetro del eje
Similar al análisis realizado en la sección 6.2.3.2.1, se valida la fuerza máxima soportada por el eje
teniendo en cuenta el esfuerzo cortante máximo del material
𝐹 = 𝜏𝐴
Donde, 𝐴 es el área transversal del tornillo y se calcula como 𝐴 =𝜋𝐷2
4. El diámetro del eje
es 14.8 𝑚𝑚 por lo tanto 𝐴 = 1.72 𝑥 10−4 𝑚2.
El esfuerzo cortante máximo para el acero es 200 MPa [11]
𝐹 = 200 [𝑀𝑃𝑎](1.72 𝑥 10−4 [𝑚2]) = 34.41 𝑘𝑁
Comparado con la fuerza requerida con la permitida, se tiene un factor de seguridad de más de 30.
35 𝑚𝑚
15 𝑚𝑚
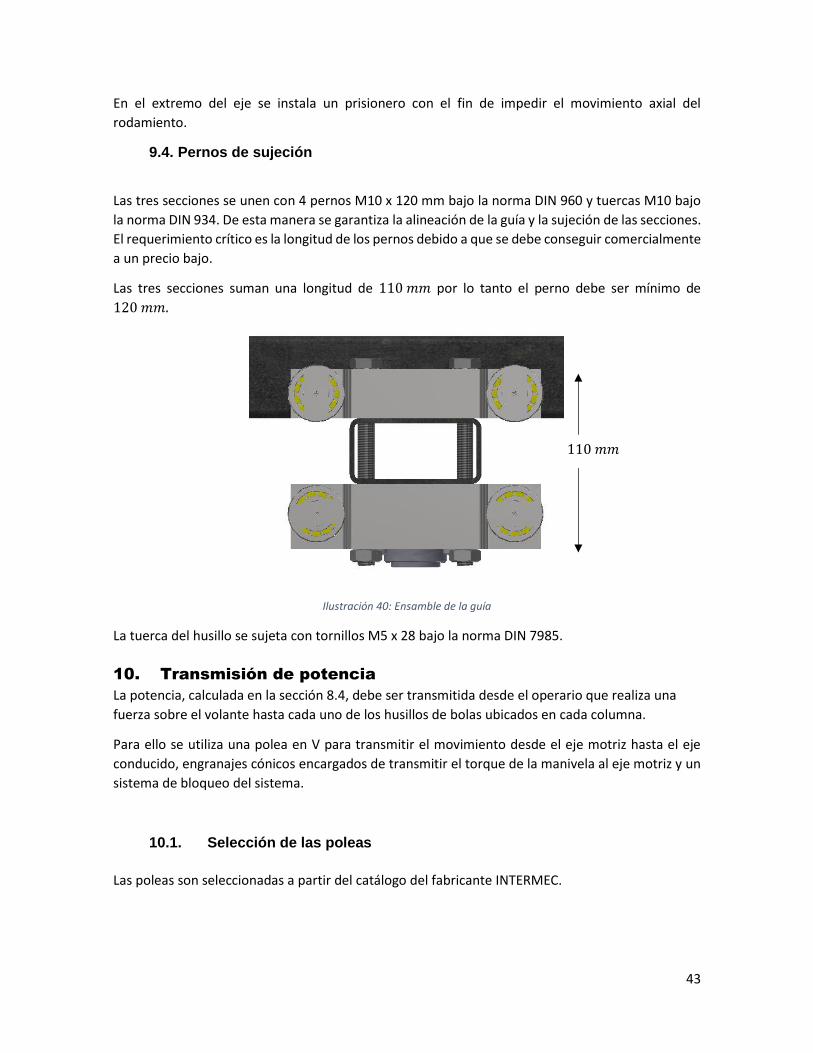
43
En el extremo del eje se instala un prisionero con el fin de impedir el movimiento axial del
rodamiento.
9.4. Pernos de sujeción
Las tres secciones se unen con 4 pernos M10 x 120 mm bajo la norma DIN 960 y tuercas M10 bajo
la norma DIN 934. De esta manera se garantiza la alineación de la guía y la sujeción de las secciones.
El requerimiento crítico es la longitud de los pernos debido a que se debe conseguir comercialmente
a un precio bajo.
Las tres secciones suman una longitud de 110 𝑚𝑚 por lo tanto el perno debe ser mínimo de
120 𝑚𝑚.
Ilustración 40: Ensamble de la guía
La tuerca del husillo se sujeta con tornillos M5 x 28 bajo la norma DIN 7985.
10. Transmisión de potencia
La potencia, calculada en la sección 8.4, debe ser transmitida desde el operario que realiza una
fuerza sobre el volante hasta cada uno de los husillos de bolas ubicados en cada columna.
Para ello se utiliza una polea en V para transmitir el movimiento desde el eje motriz hasta el eje
conducido, engranajes cónicos encargados de transmitir el torque de la manivela al eje motriz y un
sistema de bloqueo del sistema.
10.1. Selección de las poleas
Las poleas son seleccionadas a partir del catálogo del fabricante INTERMEC.
110 𝑚𝑚

44
10.1.1. Condiciones de diseño
Los parámetros requeridos para la selección de poleas se muestran en la Tabla 19.
Información
𝑃𝑜𝑡𝑒𝑛𝑐𝑖𝑎 𝑟𝑒𝑞𝑢𝑒𝑟𝑖𝑑𝑎 0.068 Hp
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝐴𝑛𝑔. 𝑀𝑜𝑡𝑟𝑖𝑧 50 rpm
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝐴𝑛𝑔. 𝐶𝑜𝑛𝑑𝑢𝑐𝑖𝑑𝑎 50 rpm
𝐷𝑒𝑗𝑒𝑚𝑜𝑡 = 𝐷𝑒𝑗𝑒𝑐𝑜𝑛𝑑
0.75 in
𝐿 𝑒𝑛𝑡𝑟𝑒 𝑒𝑗𝑒𝑠 536 mm
Servicio normal
Trabajo ligero Tabla 19: Parámetros para selección de poleas en V
La potencia requerida se toma de la Tabla 16,
𝑃𝑜𝑡𝑟𝑒𝑞 = 51.1 𝑊 = 0.068 ℎ𝑝
La longitud entre los ejes se mide utilizando el software de diseño Autodesk Inventor 2018 ©, como
se muestra en la Ilustración 41.
Ilustración 41: Distancia entre ejes de los husillos
Se trata de ejes de 20 𝑚𝑚 de diámetro por lo tanto el agujero de las poleas debe ser un poco menor
al de los ejes, siendo estos de 3
4𝑖𝑛.
10.1.2. Factor de seguridad
La potencia requerida debe multiplicarse por un factor de seguridad sugerido por el fabricante de
acuerdo con las condiciones de operación de la máquina y el tipo de aplicación. En este diseño se
tiene un servicio tipo normal de trabajo ligero, debido a la velocidad de rotación de los ejes.
𝐹. 𝑆. = 1.2
𝑃𝑜𝑡𝑑𝑖𝑠𝑒ñ𝑜 = 𝑃𝑜𝑡𝑟𝑒𝑞 ∗ 𝐹. 𝑆. = 0.0816 ℎ𝑝

45
10.1.3. Selección del tipo de correa
Siguiendo las gráficas del fabricante mostradas en el Gráfico 4, se selecciona la correa de tipo 3V.
Gráfico 4: Selección del tipo de polea [15]
10.1.4.Diámetro de la polea
De acuerdo con las tablas de selección, mostradas en la Tabla 20, el diámetro de 55 𝑚𝑚 permite
transmitir la potencia de 0.09 ℎ𝑝, sin embargo, el diámetro mínimo recomendado por el fabricante
es de 65 𝑚𝑚.
10.1.5. Selección de la referencia
Se selecciona el modelo de polea que incluye buje QD con el fin de facilitar la instalación de los
componentes en el dispositivo.
Para un diámetro de 65 𝑚𝑚 la referencia de la polea es la PQ 1-3V65 con un buje QD de referencia
JA. La Ilustración 42 muestra la instalación de la polea.
Tabla 20: Tabla de selección de diámetros [15]
46
Ilustración 42: Sistema de polea
10.1.6. Longitud de la correa
La ecuación 3 permite calcular la longitud de la polea requerida conociendo la distancia entre
centros y los diámetros de las poleas.
𝐿𝑝 = 2𝐶 + 1.57(2𝐷) +(2𝐷)2
4𝐶 [15]
𝐿𝑝 = 1283.98 𝑚𝑚
Ecuación 3. Calculo de la longitud de la correa
10.2. Selección de la caja de engranajes
Así como se enunció en la sección 8.4, la velocidad a la cual el operario girará la manivela es de
25 𝑟𝑝𝑚 mientras la velocidad angular de los husillos debe ser de 50 𝑟𝑝𝑚. Esto implica la necesidad
de amplificar la velocidad en una razón de 2:1.
Se debe, también, generar un cambio de dirección del movimiento como se muestra en la Ilustración
43.
𝝎𝒆𝒏𝒕𝒓𝒂𝒅𝑎
𝝎𝒔𝒂𝒍𝒊𝒅𝒂

47
Un sistema de engranaje cónico con reducción de 2:1 se puede implementar para realizar la amplificación de la velocidad y cambiar la dirección de giro. Es por esto por lo que se diseñó conceptualmente los engranajes requeridos y pueden ser mandados a fabricar a medida o adquirir en el mercado unos modelos similares.
Ilustración 44: Engranajes cónicos
Utilizando la herramienta de diseño de engranajes biselados de Autodesk Inventor 2018 ©, se
obtienen engranajes con una relación de 1:2 y módulo de 2 mm, con una anchura de cara de 20 𝑚𝑚.
10.3. Sistema de seguridad
Se busca que el riesgo de accidentes se minimice con el uso del dispositivo, por lo tanto, es importante garantizar la operación segura. El factor de riesgo que se busca eliminar es la liberación del sistema de potencia y por consiguiente el mecanismo se regrese de forma descontrolada. Para eliminar este riesgo se instala un sistema de péndulo y topes accionados por un cambio de velocidad repentino, similar a los utilizados en los cinturones de los automóviles.
Ilustración 45: Sistema de seguridad de bloqueo [16]
Ilustración 43: Cambio de dirección de la velocidad angular

48
11. Ensamble del dispositivo
11.1. Anclaje columnas
Las cargas presentes en el mecanismo elevador deben ser transferidas a suelo, o en este caso a la mesa móvil. Es por ello por lo que se diseñan los sistemas de anclaje de las columnas con un alto factor de seguridad. Las cargas que soportan los anclajes se presentaron en la Tabla 4. Los anclajes serán ángulos de acero de 50 x 50 x 5 mm. Estos estarán sujetados con pernos M10 x 50 bajo la norma DIN 933 con tuercas M10 DIN 934. En la parte inferior se ubica una plataforma de acero de 5 mm de espesor soportada por dos vigas propias de la mesa móvil. En la sección larga se colocan 4 pernos linealmente mientras en la lateral se instalan 2 pernos. La Ilustración 46 presenta la ubicación de los anclajes y su configuración con la mesa móvil.
Ilustración 46: Anclaje de las columnas
11.2. Anclaje de rodamientos para los ejes del husillo
Como se muestra en la sección 8.5, los rodamientos se anclan a las columnas en la zona superior
mediante el diseño de la plataforma superior. Esta pieza tiene un grosor de 10 mm fabricada en
acero con el fin de garantizar la rigidez.
El rodamiento de soporte simple se une a la plataforma superior mediante pernos M5 x 20 bajo la
norma DIN 933. Se instalan siguiendo las perforaciones que el fabricante THK provee para tal fin.
Como protección del rodamiento, se instala una platina de aluminio cubriendo la plataforma
superior. Esta configuración se muestra en la Ilustración 47.

49
Ilustración 47: Anclaje rodamientos eje husillo en la plataforma superior
Similar a como se anclaron las columnas, se realiza el anclaje del soporte fijo del husillo en la parte
inferior de las columnas. La unidad de soporte se encuentra perforada por el fabricante para instalar
los pernos de sujeción.
Se realiza un segundo nivel en la estructura de la mesa móvil y se instala una plataforma para ubicar
los rodamientos. Sobre la plataforma se instalan unos bujes para separar el rodamiento de la
plataforma y garantizar las dimensiones coincidentes.
La unidad de soporte es anclada con pernos M5 x 45 bajo la norma DIN 933 y tuercas M5 DIN 934.
Ilustración 48: Anclaje unidades de soporte fijo Husillos

50
12. Diseño del movimiento de la mesa móvil
La mesa móvil se basa en una estructura de acero montada sobre unas ruedas con topes sobre la
cual se instala todo el mecanismo elevador y plataformas.
12.1. Máximo radio de giro
Con el fin de evitar deslizamientos de la carga en la plataforma debido a giros peligrosos por su bajo
radio se deben instalar unos topes sobre las llantas que impidan esta condición
Esta condición crítica depende del factor de fricción entre los tubos que se cargan y la plataforma.
Al igual que en la sección 5.2, el factor de fricción 𝜇𝑠 = 0.61.
Con el fin de calcular el máximo radio de giro permitido se utiliza la expresión
𝑅 ≥𝑉2
𝜇𝑠𝑔
Deducida a partir de las ecuaciones de movimiento circular y análisis de fuerzas sobre el dispositivo.
Para una velocidad de 5 𝑘𝑚
ℎ= 1.39
𝑚
𝑠 tomada como la velocidad media para una persona
caminando, el radio de giro mínimo permitido es:
𝑅 =1.392
0.61(9.8)= 0.323 𝑚
Utilizando relaciones trigonométricas, para las dimensiones de la mesa móvil mostradas en el plano
19, se requiere:
∅1 = tan−1𝐿𝑎𝑟𝑔𝑜
𝑟𝑎𝑑𝑖𝑜𝑔𝑖𝑟𝑜 −𝑎𝑛𝑐ℎ𝑜
2
= tan−10.847
0.323 −0.621
2
= 89.19°
∅2 = tan−1𝐿𝑎𝑟𝑔𝑜
𝑟𝑎𝑑𝑖𝑜𝑔𝑖𝑟𝑜 +𝑎𝑛𝑐ℎ𝑜
2
= tan−10.847
0.323 +0.621
2
= 53.2°
Ángulo de 89.19° en la llanta 1 y 53.2° en la segunda, por lo tanto, en estas posiciones se debe
agregar un tope en la llanta.
𝑅
Ilustración 49: Radio de giro del dispositivo

51
Ilustración 50: Radio de giro máximo permitido
13. Análisis Económico
Es importante conocer la viabilidad del proyecto con el fin de ser competitivo en el mercado, es por
ello por lo que se presenta un análisis de los costos asociados a las piezas del dispositivo, basado en
el costo del material y la mano de obra para fabricarlas.
El costo del material es actualizado a diciembre de 2018 obtenido de proveedores locales e
internacionales y es únicamente utilizado para fines ilustrativos y académicos de este proyecto.
La mano de obra se cotizó en el laboratorio de manufactura de la Universidad de los Andes y son
precios dados para estudiantes a diciembre de 2018, por lo tanto, pueden variar de acuerdo con el
taller donde las piezas sean fabricadas.
El Gráfico 5 presenta la distribución de costos por pieza para fabricar el dispositivo, incluyendo el
costo del material y la mano de obra. En Anexos: Costos del dispositivo se muestran los costos de
cada pieza diferenciando cada ítem.
El costo total del dispositivo es finalmente de $ 11.399.400
Gráfico 5: Distribución de costos del dispositivo
24.27%
22.53%
11.43%
8.86%
7.02%
6.32%
6.14%
3.68%2.63%
1.84%
1.68% 1.40% 1.32%0.88%
Ejes y Husillos de Bolas
Soportes Husillos
Rodamiento NJ 202 ECP
Perfiles Estructurales
Mesa movil
Dispositivo Guia Inferior y superior
Caja de engranajes
Otros
Polea
Plataforma soporte columnas, husillo y soporte superior
Pernos, tornillos y arandelas
Plataforma y platina superior aluminio
Ángulos 90 grados 50 x 5 - 60 y 50 x 5 - 160
Volante

52
Es razonable que aproximadamente el 50% del costo total del dispositivo es en el mecanismo
elevador, incluyendo los soportes fijos y simples, los ejes y los husillos de bolas. El 11.43% del costo
son los rodamientos del mecanismo guía, lo cual representa una gran participación en el total del
dispositivo.
Piezas como el dispositivo guía fueron sobredimensionados y los husillos de bolas con sus accesorios
se seleccionaron a pesar de su alto costo, debido a que siendo un dispositivo manual prima la
seguridad y protección del operario durante el funcionamiento del dispositivo sobre su costo total.
14. Conclusiones y trabajos futuros
El mecanismo diseñado es operado sin utilizar fuentes de poder externas siendo completamente
manual.
Debido al uso de husillos de bolas, la potencia requerida para operar el dispositivo es acorde a las
capacidades de un hombre promedio colombiano.
Los cálculos se basaron en condiciones críticas además de incorporar factores de seguridad
adicionales en los soportes de las columnas y rodamientos, dando confiabilidad al diseño.
El costo del dispositivo es similar al costo de sistemas ya existentes por lo tanto es conveniente
realizar una optimización de algunas piezas entrando así a competir en el mercado. Principalmente
en el dispositivo guía que representa aproximadamente el 18% del costo total del dispositivo,
contando que tiene 16 rodamientos en presenta un factor de seguridad superior a 30 (Sección 9.3).
Es posible implementar un sistema de control que guíe al operario en el montaje de los tubos con
el fin de evitar que sean colocados en el punto crítico.
15. Referencias
[1] R. A. Rojas, Compositor, El 90 % de los accidentes laborales se atribuyen a factores humanos.
[Grabación de sonido]. Caracol Radio. 2015.
[2] Fourth European working conditions survey, «Fundación Europea para la Mejora de las Condiciones de
Vida y de Trabajo,» 2005. [En línea]. Available:
https://osha.europa.eu/sites/default/files/publications/documents/es/publications/factsheets/73/Fact
sheet_73_-_Riesgos_asociados_a_la_manipulacion_manual_de_cargas_en_el_lugar_de_trabajo.pdf.
[3] Alcaldia municipal de Ibague, «INSTRUCTIVO PARA MANIPULACION MANUAL DE CARGAS,» 09 07 2015.
[En línea]. Available: https://www.ibague.gov.co/portal/admin/archivos/publicaciones/2015/12311-
DOC-20151130.pdf. [Último acceso: 2018 12 29].
[4] MINTRABAJO, «INFORME EJECUTIVO, II ENCUESTA NACIONAL DE CONDICIONES DE SEGURIDAD Y
SALUD EN EL TRABAJO EN EL SISTEMA GENERAL DE RIESGOS,» 2012. [En línea]. Available:
https://ccs.org.co/salaprensa/images/Documentos/INFORME_EJECUTIVO_II%20ENCSST.pdf. [Último
acceso: 19 01 2019].
53
[5] Technical floor, «Pavimento acabado grano,» technicalfloor, [En línea]. Available:
http://technicalfloor.com/pavimentos-continuos-impermeables/. [Último acceso: 13 Noviembre 2018].
[6] M. d. Trabajo, «Resolución 1016 de Marzo 31 de 1989,» 1989.
[7] L. Ruiz, «Manipulación manual de cargas. Guia tecnica del INSHT,» Ministerio de trabajo e inmigración,
Madrid.
[8] R. &. P.-L. L. &. G.-M. E. Avila-Chaurand, «Dimensiones antropométricas de la población
latinoamericana : México, Cuba, Colombia, Chile,» researchgate, Mexico, 2018.
[9] H. Young, R. Freedman y L. Ford, «Aplicación de las leyes de Newton,» de Física universitaria, Mexico,
Pearson, 2009, pp. 150-151.
[10] Tubos Colmena S.A.S., «PERFIL ESTRUCTURAL TUBULAR,» 2018. [En línea]. Available:
http://tuboscolmena.com/colmena/.
[11] Redica Ltda, 2018. [En línea]. Available: http://www.redica.com.co/tornillos-hexagonales-milimetricos-
din-960-961.html.
[12] Tubos Colmena S.A.S., «Prefiles C Grado 50 / grado 36 Negros y galvanizados NTC 5685,» [En línea].
[13] THK, Tuerca trapezoidal para husillo, Tokio, pp. A16 - 5.
[14] THK, «Husillos de bolas,» de Catalogo general 511ES.
[15] Intermec, «Poleas en V,» Bogotá.
[16] TORCALMARKETING, «¿Cómo actúa el cinturón de seguridad?,» [En línea]. Available:
https://blogtorcal.wordpress.com/2014/09/10/como-actua-el-cinturon-de-seguridad/.
[17] J. S. Lamarca y J. O. Abad Blasco., «Análisis, Cálculo y Diseño de un elevador de columnas para
vehículos.,» Universidad de Zaragoza, 2017.
[18] rylsa, «Montacargas DOOSAN,» [En línea]. Available:
http://www.rylsa.com.co/index.php/productos/sectores/industria/equipo-liviano-y-
utilitario/montacargas-doosan.
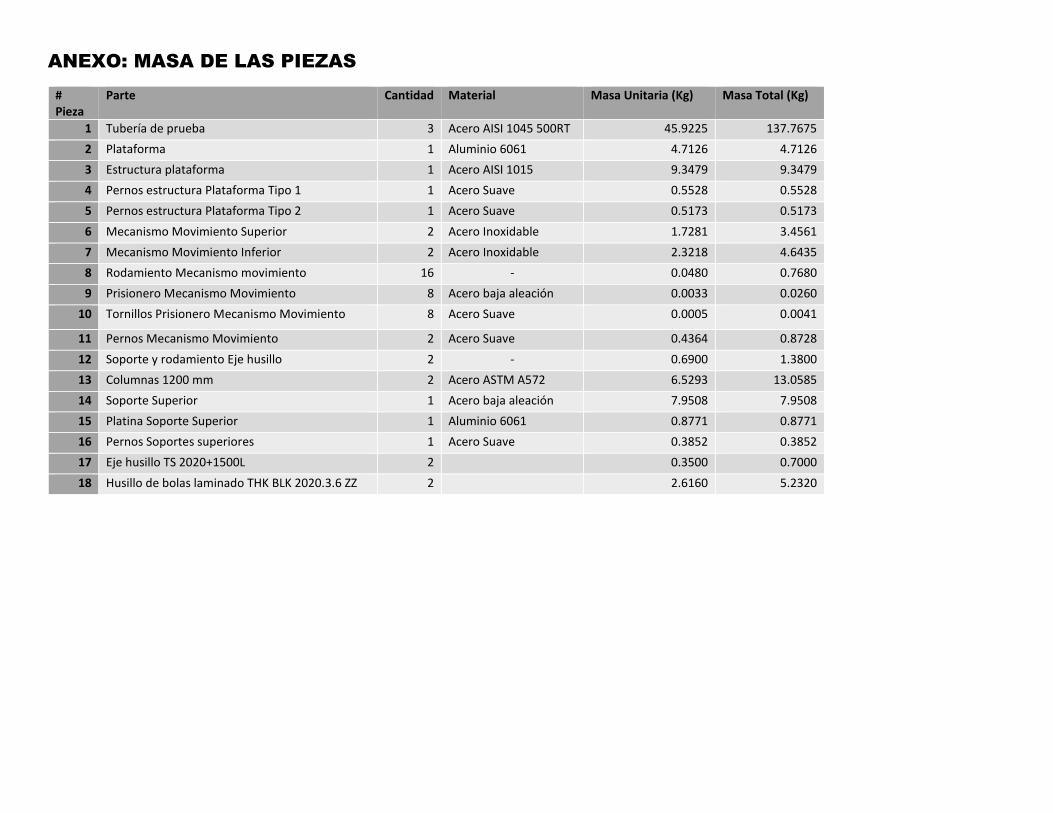
ANEXO: MASA DE LAS PIEZAS
# Pieza
Parte Cantidad Material Masa Unitaria (Kg) Masa Total (Kg)
1 Tubería de prueba 3 Acero AISI 1045 500RT 45.9225 137.7675
2 Plataforma 1 Aluminio 6061 4.7126 4.7126
3 Estructura plataforma 1 Acero AISI 1015 9.3479 9.3479
4 Pernos estructura Plataforma Tipo 1 1 Acero Suave 0.5528 0.5528
5 Pernos estructura Plataforma Tipo 2 1 Acero Suave 0.5173 0.5173
6 Mecanismo Movimiento Superior 2 Acero Inoxidable 1.7281 3.4561
7 Mecanismo Movimiento Inferior 2 Acero Inoxidable 2.3218 4.6435
8 Rodamiento Mecanismo movimiento 16 - 0.0480 0.7680
9 Prisionero Mecanismo Movimiento 8 Acero baja aleación 0.0033 0.0260
10 Tornillos Prisionero Mecanismo Movimiento 8 Acero Suave 0.0005 0.0041
11 Pernos Mecanismo Movimiento 2 Acero Suave 0.4364 0.8728
12 Soporte y rodamiento Eje husillo 2 - 0.6900 1.3800
13 Columnas 1200 mm 2 Acero ASTM A572 6.5293 13.0585
14 Soporte Superior 1 Acero baja aleación 7.9508 7.9508
15 Platina Soporte Superior 1 Aluminio 6061 0.8771 0.8771
16 Pernos Soportes superiores 1 Acero Suave 0.3852 0.3852
17 Eje husillo TS 2020+1500L 2
0.3500 0.7000
18 Husillo de bolas laminado THK BLK 2020.3.6 ZZ 2
2.6160 5.2320

ANEXO: RESULTADOS SIMULACIONES DEFLEXIÓN
Distancia 30 100 250 350 550 700 730 Max Carga de Diseño
Reacción Columna Fx (N) -2.901 -9.141 -13.158 -8.75 17.07 51.315 59.695 59.695 71.634
Fy (N) 42.508 154.989 363.553 478 647.871 723.625 733.463 733.463 880.1556
Fz (N) 0.137 0.413 0.797 0.895 0.712 0.243 0.115 0.895 1.074
Mx (N.mm) -157611 -157466 -157233 -157138 -157090 -157180 -157210 -157090 -188508
My (N.mm) 0 0 -0.001 -0.001 0 0 0 0 0
Mz (N.mm) 731.392 2306.005 3331.541 2235.964 -4225.43 12807.95 14908.77 14908.77 17890.52
Reacción Husillo Fx (N) -41.047 -140.834 -279.505 -315.016 -249.39 -803.604 -34.548 -34.548 -41.4576
Fy (N) -0.137 -0.413 -0.797 -0.895 -0.712 -0.243 -0.115 -0.115 -0.138
Fz (N) 1353.192 1240.711 1032.147 917.698 747.829 672.075 662.237 1353.192 1623.83
Mx (N.mm) 68.645 212.362 442.748 537.567 586.153 499.173 469.082 586.153 703.3836
My (N.mm) 136839 84859.19 1497.245 -32847.6 -50585.9 -19307 -8465.65 136839 164206.8
Mz (N.mm) -0.002 -0.006 -0.011 -0.012 0 0 0 0 0
Reacción Platina Superior Fx (N) -0.002 0 -0.018 0 0 0 0 0
Fy (N) 0 0 0 0 0 0 0 0
Fz (N) 38.146 131.693 266.348 266.461 131.919 94.243 266.461 319.7532
Mx (N.mm) 5.832 17.562 33.85 30.229 10.32 4.891 33.85 40.62
My (N.mm) -6747.71 -21223.6 -30320.9 411167.3 121752.8 141457.2 411167.3 493400.8
Mz (N.mm) 0 0 0 0 0 0 0 0

ANEXO: COSTOS DEL DISPOSITIVO
PIEZA Cantidad Unidades Fabricación Costo material Costo Mano Obra Total Pieza
Ángulos 90 grados 50 x 5 - 60 y 50 x 5 - 160 6 Un Mecanizado 150,000.00 150,000.00
Perno M10 x 18 32 Un 0.00 32,000.00
Tuerca M10 56 Un 0.00 56,000.00
Perfil estructural C 160 x 60 x 2.3 2000 mm Corte 600,000.00 60,000.00 660,000.00
Dispositivo Guía Inferior y superior 4 Un Corte y CNC 200,000.00 520,000.00 720,000.00
Prisionero Mecanismo Guía 16 Un Corte y Mecanizado 50,000.00 60,000.00 110,000.00
Tornillo M3 x 8 16 Un 0.00 16,000.00
Rodamiento NJ 202 ECP 16 Un 0.00 1,302,400.00
Plataforma y platina superior aluminio 1 Un Corte y Mecanizado 100,000.00 60,000.00 160,000.00
Perfil estructural Rectangular 50x30x2.5 2060 mm Corte y Mecanizado 100,000.00 150,000.00 250,000.00
Perfil estructural Rectangular 80x40x3 614 mm Corte y Mecanizado 100,000.00 0.00 100,000.00
Perno M12 x 1.25 x 110 4 Un 0.00 4,000.00
Perno M12 x 1.25 x 100 4 Un 0.00 4,000.00
Tuerca M12 8 Un 0.00 8,000.00
Arandela M12 8 Un 0.00 0.00
Recubrimiento Goma 1 Un Mecanizado 30,000.00 30,000.00
Husillo de bolas BLK 2020-3,6 2 Un 0.00 1,770,000.00
Tornillo M5 x 28 8 Un 0.00 8,000.00
Perno M10 x 120 8 Un 0.00 8,000.00
Soporte Eje Husillo Superior FF 20 2 Un 0.00 516,000.00
Eje Husillo BLK 2020 - 3 2300 mm Mecanizado 25,000.00 997,000.00
Perno M5 x 20 8 Un 0.00 8,000.00
Perno M5 x 30 4 Un 0.00 4,000.00
Perno M5 x 45 8 Un 0.00 8,000.00
Tuerca M5 20 Un 0.00 20,000.00
Perno M10 x 1 x 50 16 Un 0.00 16,000.00
Soporte Fijo Eje Husillo Inferior FK 20 2 Un 0.00 2,052,000.00
Tope Inferior 2 Un Corte y Mecanizado 80,000.00 60,000.00 140,000.00
Polea PQ 1-3V65 2 Un 300,000.00 0.00 300,000.00 Correa Polea 3V 1284 mm Plataforma soporte columnas, husillo y soporte superior 3 Un Mecanizado 210,000.00 210,000.00
Volante 1 Un 100,000.00 0.00 100,000.00
Buje separación soporte husillo 4 Un Corte y Mecanizado 80,000.00 60,000.00 140,000.00
Caja de engranajes 1 Un 0.00 700,000.00
Mesa móvil 1 Un 0.00 800,000.00

1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Plataforma Peso:4.71 kg
Material:Aluminio 6061
CANT:
01 A4 Escala:
1:5No. Plano:
1 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
700.00
500.00
5.00
x8 12.10 Pasante
100.00
87.50 242.50
40.00
242.50
300.00

LISTA DE PIEZAS
ELEMENTO CTDAD Nº DE PIEZA
DESCRIPCIÓN
37 614.000
mm
ISO 10799-2 - 80x40x3 -
614
Acero para construcciones -
Secciones huecas
estructurales soldadas
modeladas en frío
61 8 DIN 934 - M12 Tuerca hexagonal
63 8 ISO 7090 - 12 Arandelas planas,
achaflanadas - Serie normal
- Productos de clase A
64 1400.000
mm
ISO 10799-2 - 50x30x2.5 -
700
Acero para construcciones -
Secciones huecas
estructurales soldadas
modeladas en frío
65 660.000
mm
ISO 10799-2 - 50x30x2.5 -
330
Acero para construcciones -
Secciones huecas
estructurales soldadas
modeladas en frío
67 4 DIN 960 - M12 x 1.25 x 110 Perno de cabeza-hex
68 4 DIN 960 - M12 x 1.25 x 100 Perno de cabeza-hex
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Estructura de la plataformaPeso:17.84 kg
Material:Acero AISI 1015
CANT:
A3 Escala:
1:4No. Plano:
2 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
700.00
330.00
87.50
330.00
370.00
612.50
319.00
379.00
404.25
461.75
131.75
74.25
62.50 247.50 277.50 112.50
37
65
64
2 x 31.00 Pasante
433.00
103.00
350.00
61
68
63
R5.008 x

LISTA DE PIEZAS
DESCRIPCIÓN
Nº DE PIEZACTDADELEMENTO
ColmenaVigaPerfilC160x60 - 04320.000
mm
2
Sección angular de aceroDIN 59370 - 50 x 5 - 60240.000
mm
4
Sección angular de aceroDIN 59370 - 50 x 5 - 160320.000
mm
5
Perno de cabeza-hexDIN 933 - M10 x 18166
Tuerca hexagonalDIN 934 - M10167
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
ColumnaPeso:N/D
Material:Acero inoxidable
CANT:
2 A3 Escala:
1:5No. Plano:
3 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
1000.00
2
19.00
59.00
99.00
139.00
139.00
28.00
14.00
44.00
28.00
160.00
60.00
10.008 x

LISTA DE PIEZAS
Nº DE PIEZACTDADELEMENTO
VigaPerfilC160x60 - 04320.000
mm
2
Soporte Superior13
DIN 59370 - 50 x 5 - 60240.000
mm
4
DIN 59370 - 50 x 5 - 160320.000
mm
5
DIN 933 - M10 x 18166
DIN 934 - M10167
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Ensamble ColumnasPeso:N/D
Material:Acero inoxidable
CANT:
1 A3 Escala:
1:5No. Plano:
4 de 22
Fecha:Dibujó:Daniel Felipe López Rev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
4
6
7
5
2
2
3

1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Soporte SuperiorPeso:N/D
Material:Acero, alta resistencia, aleación baja
CANT:
1 A4 Escala:
1:4No. Plano:
5 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
4 x 5.00 Pasante
2 x 58.00 Pasante
8 x 6.60 Pasante
27.00
55.25
104.75
133.00
18.25
67.75
43.00
554.25
579.00
603.75
622.00
5.00
55.25
27.00
104.75
133.00
160.00

1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Platina superiorPeso:0.81 kg
Material:Aluminio 6061
CANT:
1 A4 Escala:
1:4No. Plano:
6 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
622.00
160.00
3.00
27.00
133.00
43.00
579.00
4x 5.00 Pasante

LISTA DE PIEZAS
DESCRIPCIÓN
Nº DE PIEZACTDADELEMENTO
Sección angular de aceroDIN 59370 - 50 x 5 - 6060.000 mm1
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto grado
Angulo Soporte columnaPeso:0.21 kg
Material:Acero, suave
CANT:
4 A4 Escala:
1:1No. Plano:
7 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
1
60.00
2x 10.00 Pasante
2 x 10.00 Pasante
15.00
30.00
28.00
17.50
17.50
28.00
50.00
50.00
5.00

LISTA DE PIEZAS
DESCRIPCIÓN
Nº DE PIEZACTDADELEMENTO
Sección angular de aceroDIN 59370 - 50 x 5 - 160160.000
mm
1
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Angulo soporte columna 2Peso:0.57 kg
Material:Acero, suave
CANT:
2 A4 Escala:
1:2No. Plano:
8 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
1
20.00
60.00
100.00
140.00
20.00
60.00
100.00
140.00
160.00
50.00
50.00
5.00
28.00
28.00
8 x 10.00 Pasante

SECCIÓN B-B
ESCALA 1 : 2
B
B
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Mecanismo guia inferiorPeso:1.96 kg
Material:Acero inoxidable
CANT:
2 A4 Escala:
1:3No. Plano:
9 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
12.10
R4.00
22.00
12.00
14.80
3 x 8
R31.00
10.00
152.00
4 x 10.00 Pasante
R4.00
4.75
52.75
46.00
106.00
39.50
41.00
78.00
81.40
46.00
M5x0.8 - 6H
39.10
21.50

1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Mecanismo guía superiorPeso:1.80 kg
Material:Acero inoxidable
CANT:
2 A4 Escala:
1:2No. Plano:
10 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
30.00
152.00
14.80
3.00 8.00
81.40
R2.00
R4.00
14.80
15.80
19.50
30.00
30.00
28.75
28.75
15.00
78.00
22.00
21.00 Pasante
4 x 10.00 Pasante

1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Prisionero Mecanismo GuíaPeso:0.00 kg
Material:Acero, alta resistencia, aleación baja
CANT:
16 A4 Escala:
5:1No. Plano:
11 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
28.10
15.00
1.00
3.00 Pasante
14.05
7.50

LISTA DE PIEZAS
Nº DE PIEZACTDADELEMENTO
NJ 202 ECP41
PrisioneroMecanismoMovimi
ento
42
AS 1427 - M3 x 843
MecanismoMovimientoInferi
orBolas
14
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Ensamble Rodamientos guiaPeso:2.17 kg
Material: CANT:
4 A4 Escala:
1:2No. Plano:
12 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
4
1
2
3
Nota: El ensamble del mecanismo guía superior es
exactamente igual al mostrado en este plano

LISTA DE PIEZASNº DE PIEZACTDADELEMENTO
BLK 2020-3.6ZZ Nut21DispositivoMovimientoInferiorBolas
22
EstructuraPlataformaHusilloBolas13DispositivoMovimientoBolas24DIN 7985 (H) - M5x28-H85DIN 933 - M10 x 12086DIN 934 - M1087
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Ensamble GuiaPeso:N/D
Material: CANT:
2 A3 Escala:
1:3No. Plano:
13 de 22
Fecha:Dibujó:Daniel Felipe López Rev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
1
7
5
6
4
2
3

LISTA DE PIEZAS
DESCRIPCIÓN
Nº DE PIEZACTDADELEMENTO
Type DCM With Flange S-DCM 28(56) Shaft11
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Ejes del husilloPeso:0.35 kg
Material:Generic
CANT:
1 A4 Escala:
1:5No. Plano:
14 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
1
1125.00
1175.00
Eje Conducido
Eje Motriz

1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Plataforma Soporte de columnasPeso:N/D
Material:Acero inoxidable
CANT:
1 A3 Escala:
1:4No. Plano:
15 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
722.00
22.00
700.00
5.00
190.00
230.00
270.00
310.00
500.00
2 x 25.00 Pasante
629.00
93.00
250.00
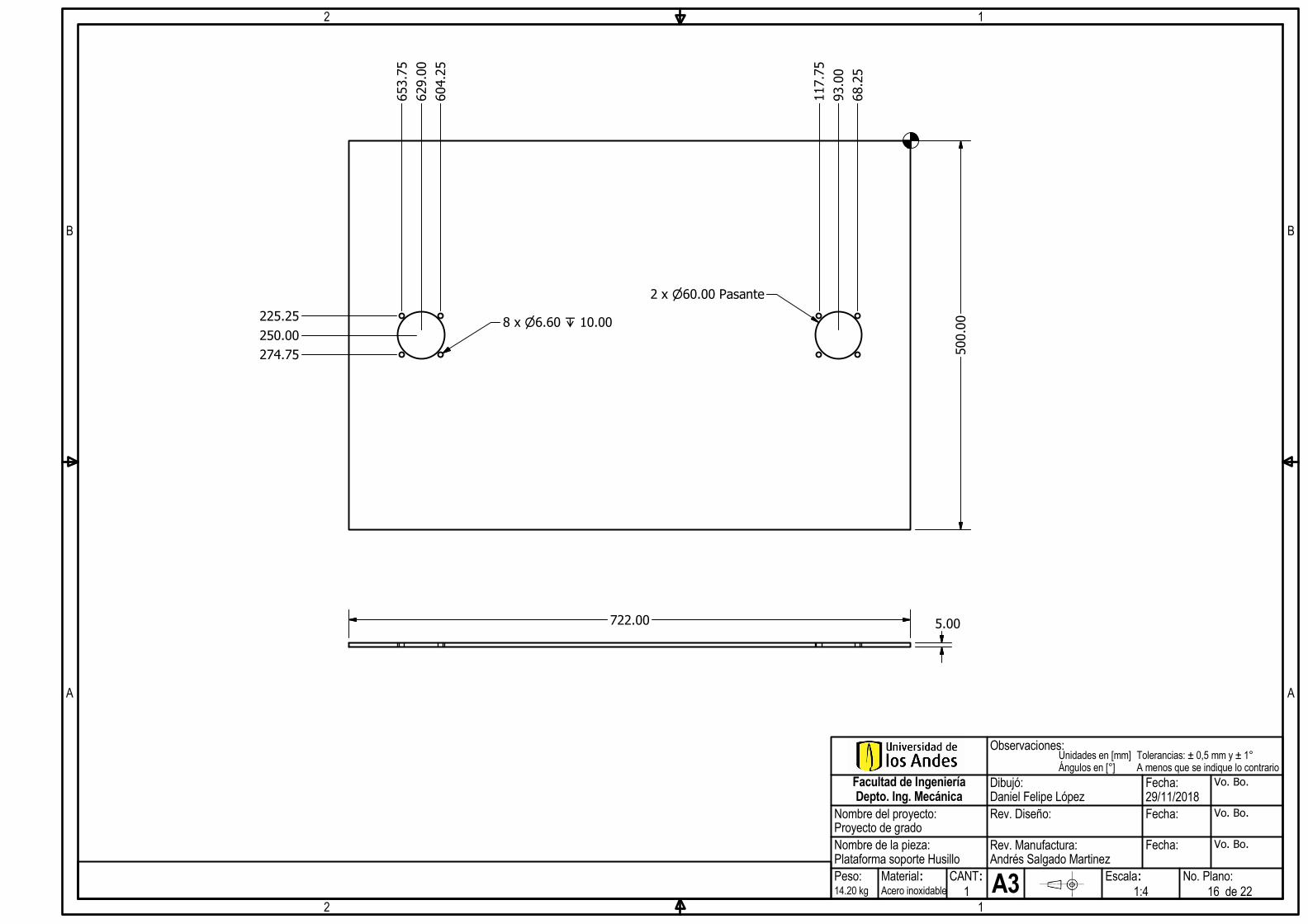
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Plataforma soporte Husillo Peso:14.20 kg
Material:Acero inoxidable
CANT:
1 A3 Escala:
1:4No. Plano:
16 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
5.00
722.00
500.00
653.75
629.00
604.25
117.75
93.00
68.25
225.25
250.00
274.75
8 x 6.60 10.00
2 x 60.00 Pasante
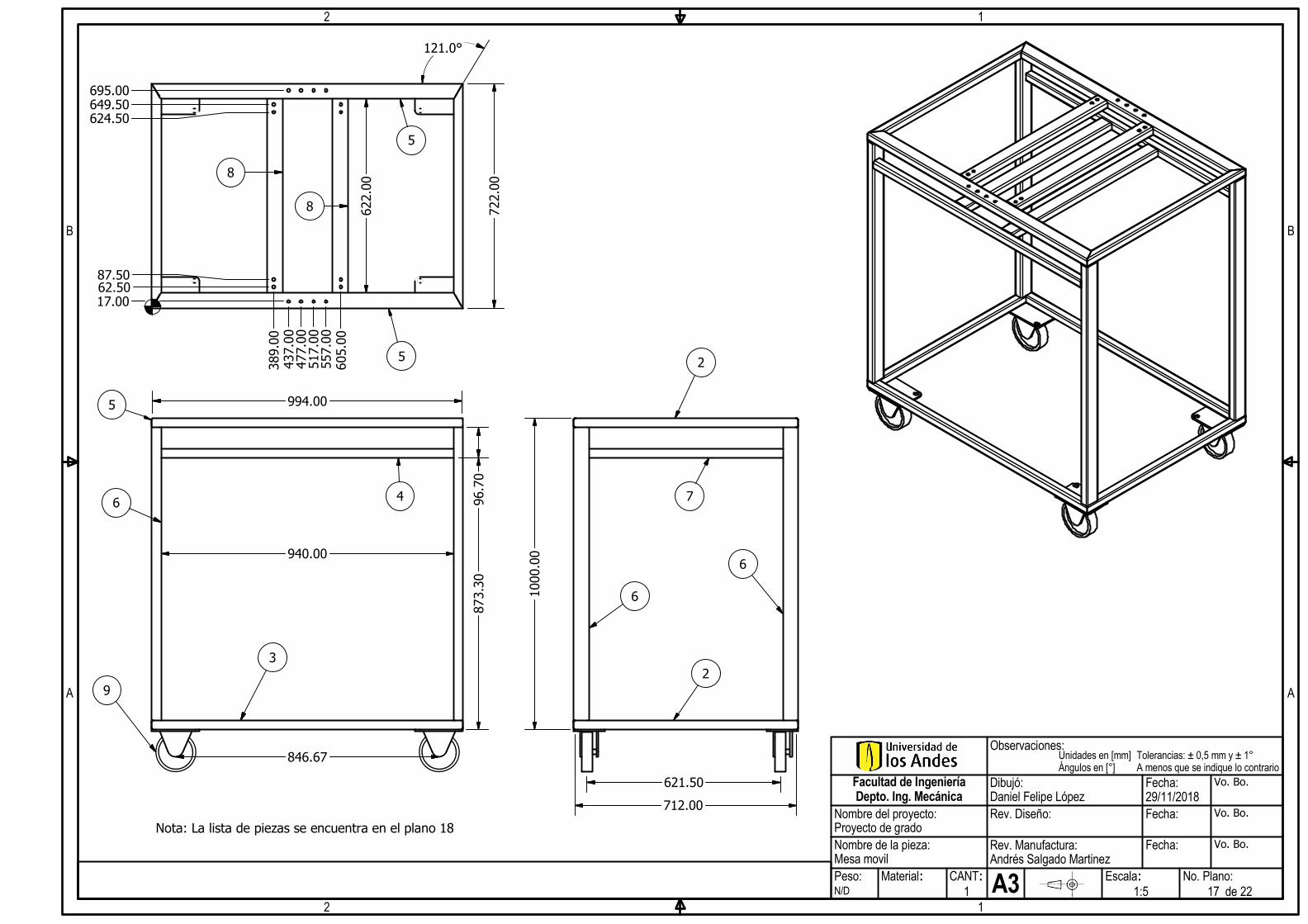
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Mesa movilPeso:N/D
Material: CANT:
1 A3 Escala:
1:5No. Plano:
17 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
96.70
873.30
940.00
1000.00
437.00
477.00
517.00
557.00
695.00
17.00
622.00
722.00
121.0°
6
3
6
6
2
8
8
2
74
5
5
Nota: La lista de piezas se encuentra en el plano 18
712.00
994.00
5
846.67
621.50
9
649.50
624.50
87.50
62.50
389.00
605.00
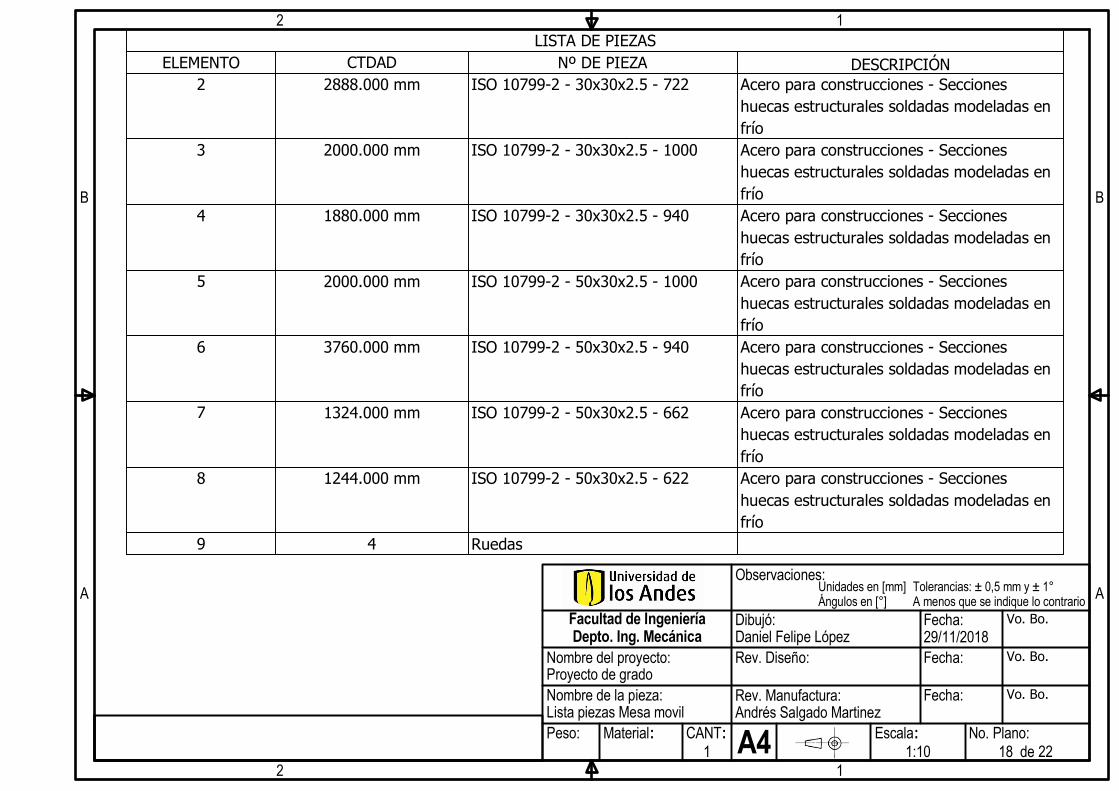
LISTA DE PIEZAS
DESCRIPCIÓN
Nº DE PIEZACTDADELEMENTO
Acero para construcciones - Secciones
huecas estructurales soldadas modeladas en
frío
ISO 10799-2 - 30x30x2.5 - 7222888.000 mm2
Acero para construcciones - Secciones
huecas estructurales soldadas modeladas en
frío
ISO 10799-2 - 30x30x2.5 - 10002000.000 mm3
Acero para construcciones - Secciones
huecas estructurales soldadas modeladas en
frío
ISO 10799-2 - 30x30x2.5 - 9401880.000 mm4
Acero para construcciones - Secciones
huecas estructurales soldadas modeladas en
frío
ISO 10799-2 - 50x30x2.5 - 10002000.000 mm5
Acero para construcciones - Secciones
huecas estructurales soldadas modeladas en
frío
ISO 10799-2 - 50x30x2.5 - 9403760.000 mm6
Acero para construcciones - Secciones
huecas estructurales soldadas modeladas en
frío
ISO 10799-2 - 50x30x2.5 - 6621324.000 mm7
Acero para construcciones - Secciones
huecas estructurales soldadas modeladas en
frío
ISO 10799-2 - 50x30x2.5 - 6221244.000 mm8
Ruedas49
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Lista piezas Mesa movilPeso: Material: CANT:
1 A4 Escala:
1:10No. Plano:
18 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
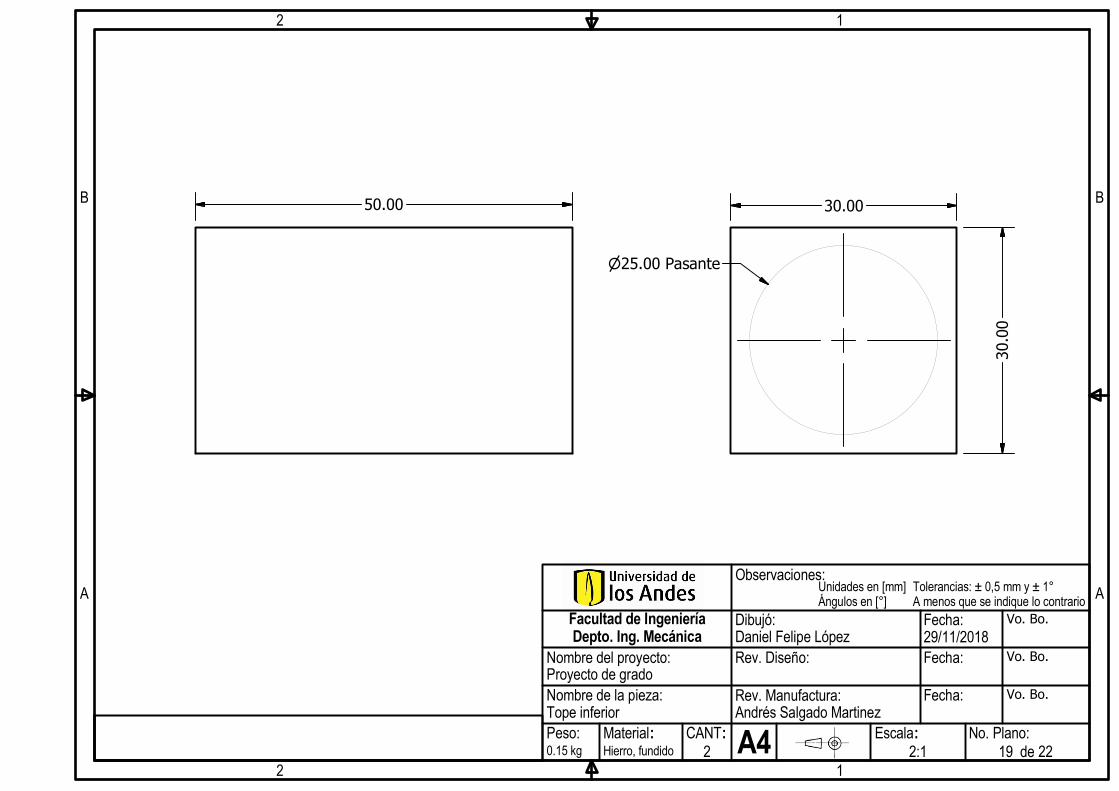
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Tope inferiorPeso:0.15 kg
Material:Hierro, fundido
CANT:
2 A4 Escala:
2:1No. Plano:
19 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
50.00
30.00
30.00
25.00 Pasante
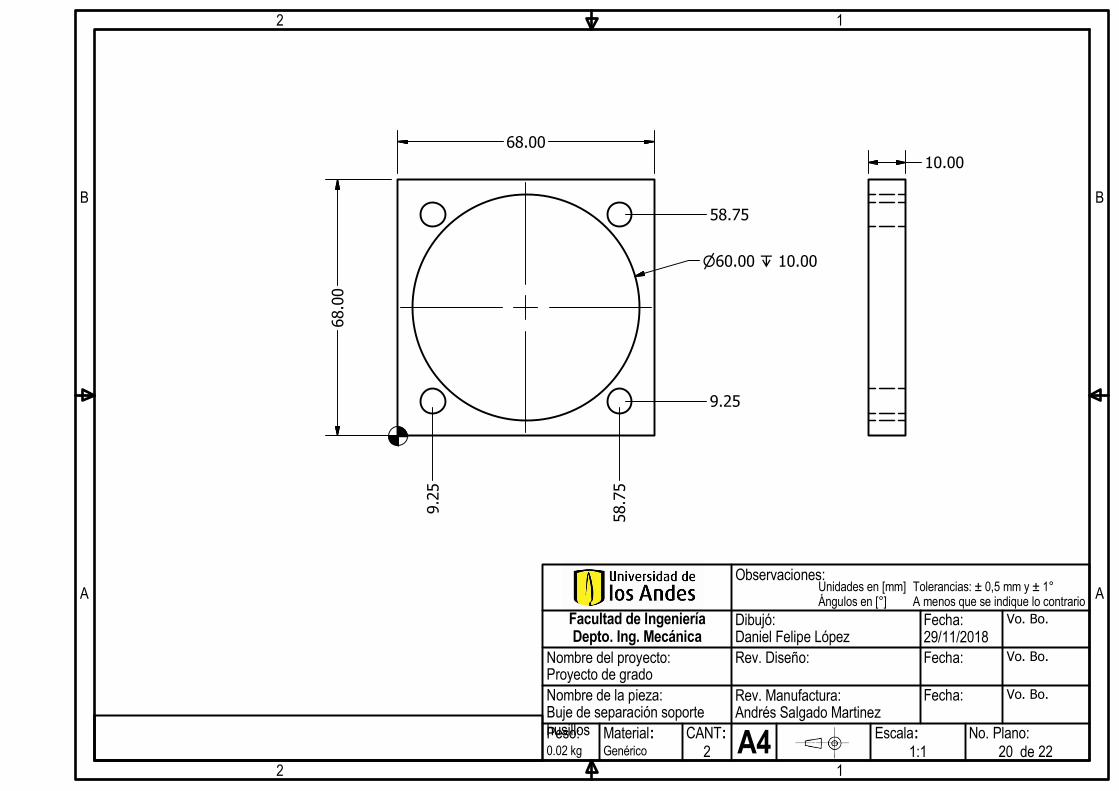
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Buje de separación soporte husillosPeso:0.02 kg
Material:Genérico
CANT:
2 A4 Escala:
1:1No. Plano:
20 de 22
Fecha:Dibujó:Daniel Felipe LópezRev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
68.00
68.00
10.00
9.25
58.75
58.75
9.25
60.00 10.00

1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Ensamblaje del dispositivoPeso:N/D
Material: CANT:
1 A3 Escala:
1:10No. Plano:
21 de 22
Fecha:Dibujó:Daniel Felipe López Rev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario
11
5
9
8
11
6
1522
16
17
6
7
4
4
3
2
10
1 18
12
14
Nota: La lista de piezas se indica en el plano 22

LISTA DE PIEZASDESCRIPCIÓNNº DE PIEZACTDADELEMENTO
EnsamblajeGuiaHusilloBolas11 PlatinaSuperiorAluminio12Supported side type FF-FF 2023Type DCM With Flange S-Eje husillo de Bolas24Perno de cabeza-hexDIN 933 - M5 x 2085Tuerca hexagonalDIN 934 - M5206Perno de cabeza-hexDIN 933 - M5 x 3047 Polea28 Correa trapezoidal19 Columnas110Fixed side type FK-FK 20Yes-FS211 Plataforma Soporte columnas
212
Buje Separación soporte husillo413 EstructuraTransportador114Perno de cabeza-hexDIN 933 - M5 x 45815Perno de cabeza-hexDIN 960 - M10 x 1 x 501616Tuerca hexagonalDIN 934 - M10 x 11617 Tope Inferior218 Eje Engranajes119 Engranaje biselado1120 Engranaje biselado2121 Volante122
1
1
2
2
A A
B B
Observaciones:
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto:
Nombre de la pieza:Proyecto de grado
Listado de piezas ensamblaje dispositivoPeso: Material: CANT:
1 A4 Escala:
No. Plano:
22 de 22
Fecha:Dibujó:Daniel Felipe López Rev. Diseño: Rev. Manufactura:Andrés Salgado Martinez
Vo. Bo.
Vo. Bo.
Vo. Bo.
29/11/2018Fecha: Fecha:
Unidades en [mm]Ángulos en [°]
Tolerancias: ± 0,5 mm y ± 1° A menos que se indique lo contrario