direção assistida eletromecânica apa.pdf
TRANSCRIPT
Academia
Pós-VendasVolkswagen
Direção AssistidaEletromecânica APA

Durante a sua leitura fique atento a estes símbolos que identificam informações importantes.
atenção/nota novo
1
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
ÍNDICE
INTRODUÇÃO .......................................................................................................... 2
QUADRO GERAL ....................................................................................................... 3 Componentes ........................................................................................................ 3 Características principais ......................................................................................... 4 Vantagens do sistema ............................................................................................ 5 Vista explodida ...................................................................................................... 6 ESTRUTURA DO SISTEMA ......................................................................................... 7 Sinais de entrada e de saída .................................................................................... 7 Família de curvas características .............................................................................. 8 Estratégias de funcionamento .................................................................................. 9
CAIXA DE DIREÇÃO ................................................................................................ 17 Componentes ...................................................................................................... 17
SISTEMA ELÉTRICO DA DIREÇÃO ASSISTIDA ............................................................ 20 Sensor de ângulo de direção G85 ........................................................................... 20 Sensores de torque de direção G269 ...................................................................... 23 Sensor de rotação do motor G28 ........................................................................... 26 Motor para direção assistida eletromecânica V187 ................................................... 27 Sensor de posição do motor .................................................................................. 29 Unidade de controle para direção assistida J500 ...................................................... 30 Luz indicadora de avaría para direção assistida eletromecanica K161 .......................... 31 Particularidades ................................................................................................... 32
ESQUEMA DE LIGAÇÕES ......................................................................................... 33

2
INTRODUÇÃO
A direção assistida eletromecânica, possui numerosas vantagens em comparação com a direção hidráulica:
conforto ao condutor, aliviando o cansaço 9físico e mental;trabalha em função das necessidades, 9atuando somente quando o condutor necessita da servo assistência e, independentemente, da velocidade de marcha.
A sigla APA (abreviatura em alemão de acionamento paralelo ao eixo principal), pertence a última geração de direções
eletromecânicas. Representa uma combinação de componentes que mostraram suas virtudes e uma série de inovações de vanguarda. Esse Sistema, é aplicado aos veículos com volante de direção à esquerda. A direção assistida eletromecânica com acionamento paralelo ao eixo principal, é uma criação própria da equipe de engenharia de desenvolvimento da Volkswagen na Alemanha, da cidade de Braunschweing, e é fabricada lá mesmo. Nesta apostila, explicaremos o funcionamento detalhado desse Sistema de direção.
3
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
Unidade de Controle para Direção Assistida J500
QUADRO GERAL
Componentes
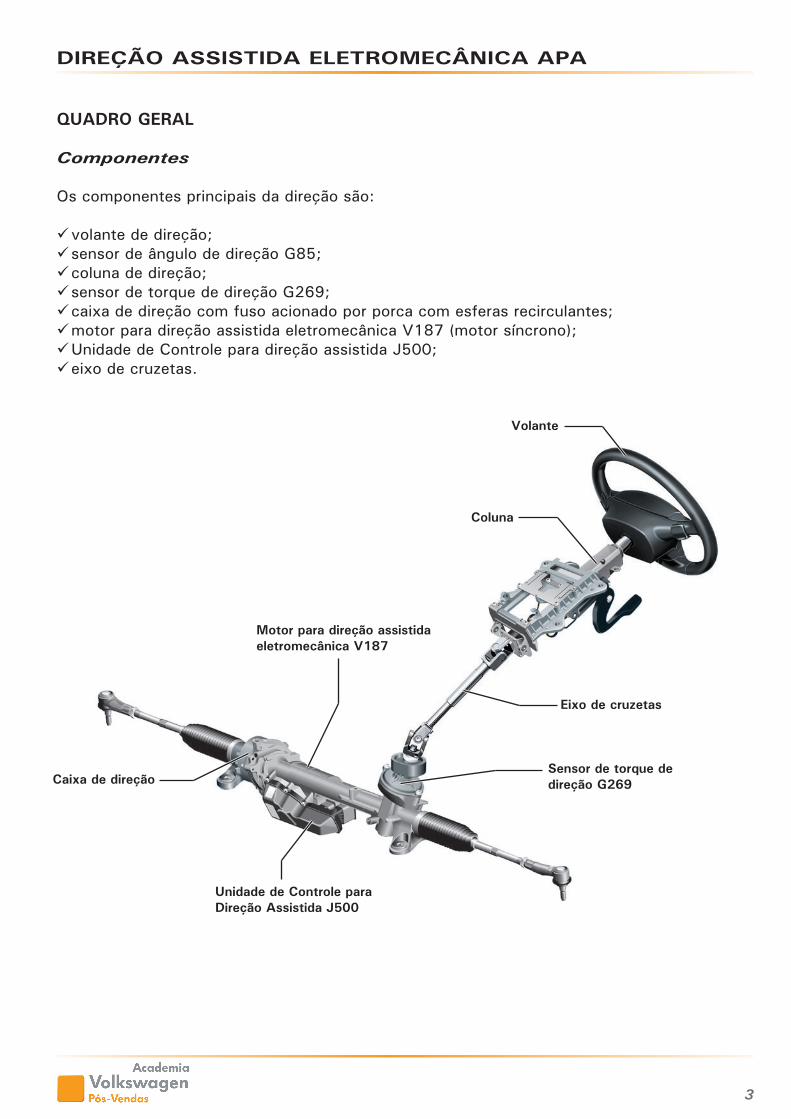
Os componentes principais da direção são:
volante de direção; 9sensor de ângulo de direção G85; 9coluna de direção; 9sensor de torque de direção G269; 9caixa de direção com fuso acionado por porca com esferas recirculantes; 9motor para direção assistida eletromecânica V187 (motor síncrono); 9Unidade de Controle para direção assistida J500; 9eixo de cruzetas. 9
Volante
Coluna
Motor para direção assistida eletromecânica V187
Eixo de cruzetas
Sensor de torque de direção G269Caixa de direção

4
Características principais
1 - No caso da direção eletromecânica, pode-se renunciar ao sistema hidráulico para a servo assistência. Com a eliminação do óleo hidráulico, promove-se uma importante contribuição para a proteção do meio ambiente.
2 - A direção assistida eletromecânica, possui um acionamento paralelo ao eixo principal. Trata-se de um novo desenvolvimento com a utilização de fuso acionado por porca com esferas recirculantes, para a realização da servo assistência.
3 - Para os efeitos da servo assistência, estimula-se um motor elétrico em função das necessidades. O Sistema oferece ao condutor, uma servo assistência para a direção subordinada às condições dinâmicas (Servotronic).
4 - O retorno da direção à posição de marcha em linha reta, se executa com a função de “retorno ativo”, implementada na direção assistida eletromecânica. Isso resulta num retorno agradável do volante ao sair de uma curva, assim como uma marcha em linha reta estável.
5 - Com a correção da marcha em linha reta, é gerada uma servo assistência que desobriga o condutor, a necessidade de manter o volante imobilizado, ao circular com o veículo havendo incidência de ventos laterais constantes ou sobre pavimento inclinado.

5
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
Vantagens do Sistema
Devido aos veículos com tração dianteira e motorização transversal, possuírem diferentes comprimentos dos semi-eixos de roda dianteiros esquerdo e direito, é freqüente que, ao acelerar ele tende a se desviar. A compensação de desvio incluída no software do sistema, detecta essa particularidade e contra-esterça a caixa de direção no sentido contrário.
Para os casos de contra-golpes no volante, por exemplo, quando se freia o veículo sobre pavimentos irregulares com aderência desigual entre os pneus, o sistema aplica forças de direcionamento específicas, para auxiliar o condutor a manter o volante posicionado.
Uma grande vantagem da direção assistida eletromecânica, em comparação com os sistemas hidráulicos, consiste na eliminação da parte hidráulica. Os componentes de servo assistência, vão alojados na caixa de direção e atuam diretamente sobre ela. Além disso, consegue reduzir consideravelmente a energia necessária. A diferença é que, a direção hidráulica requer um fluxo volumétrico permanente, e a direção assistida eletromecânica somente necessita de energia quando realmente se produzem movimentos de direção. Com essa característica de consumo de potência em função das necessidades, o consumo de combustível é reduzido.
A caixa de direção com fuso acionado por porca com esferas recirculantes, é uma das mais capazes que existem. Devido a sua especial arquitetura, com baixos índices de fricção, esta direção oferece um significativo aumento de conforto associado a uma baixíssima aspereza. Os golpes sofridos em virtude da irregularidade do solo, são filtrados totalmente pelo conjunto inerte da caixa com fuso de esferas recirculantes e o motor elétrico. Por outro lado, o baixo índice de fricção do fuso com esferas recirculantes, faz com que o condutor perceba as variações submetidas às rodas, que são importantes para uma condução sensitiva.
6
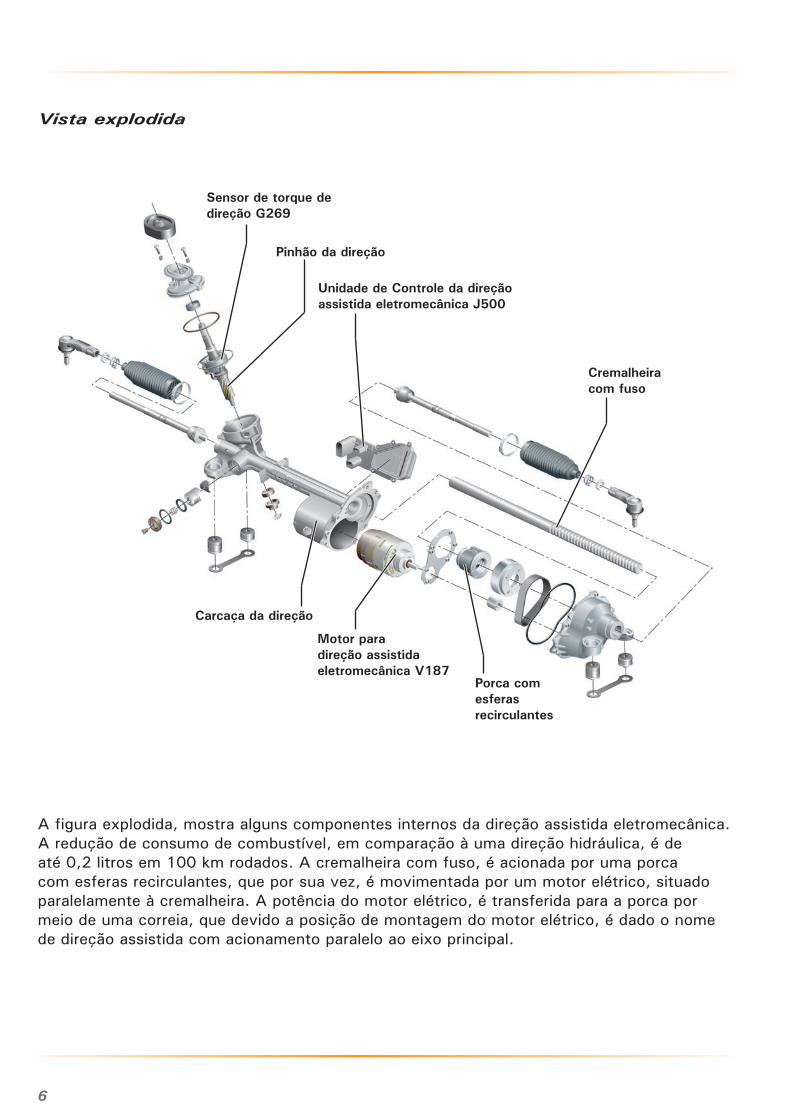
A figura explodida, mostra alguns componentes internos da direção assistida eletromecânica. A redução de consumo de combustível, em comparação à uma direção hidráulica, é de até 0,2 litros em 100 km rodados. A cremalheira com fuso, é acionada por uma porca com esferas recirculantes, que por sua vez, é movimentada por um motor elétrico, situado paralelamente à cremalheira. A potência do motor elétrico, é transferida para a porca por meio de uma correia, que devido a posição de montagem do motor elétrico, é dado o nome de direção assistida com acionamento paralelo ao eixo principal.
Vista explodida
Porca com esferas recirculantes
Sensor de torque de direção G269
Pinhão da direção
Unidade de Controle da direção assistida eletromecânica J500
Cremalheira com fuso
Carcaça da direção
Motor para direção assistida eletromecânica V187
7
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
ESTRUTURA DO SISTEMA
Sinais de entrada e de saída
Sinais de entrada
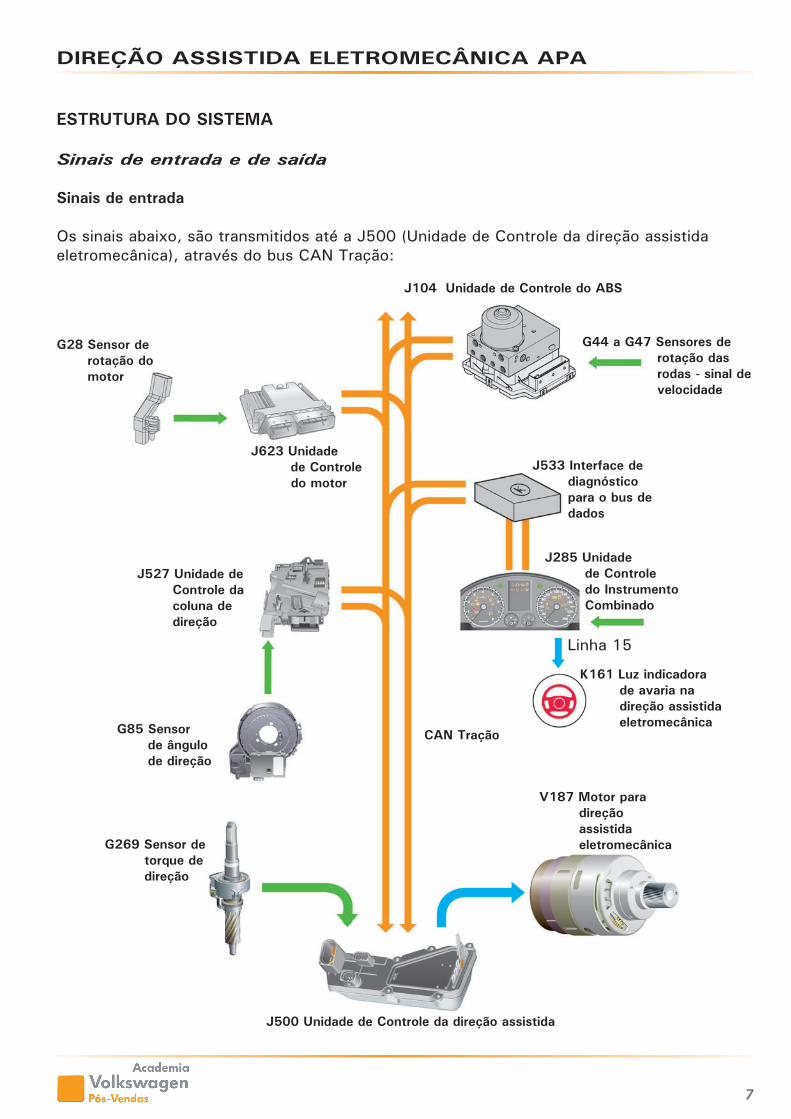
Os sinais abaixo, são transmitidos até a J500 (Unidade de Controle da direção assistida eletromecânica), através do bus CAN Tração:
J104 Unidade de Controle do ABS
G44 a G47 Sensores de rotação das rodas - sinal de velocidade
G28 Sensor de rotação do motor
J623 Unidade de Controle do motor
J500 Unidade de Controle da direção assistida
J527 Unidade de Controle da coluna de direção
G85 Sensor de ângulo de direção
G269 Sensor de torque de direção
V187 Motor para direção assistida eletromecânica
K161 Luz indicadora de avaria na direção assistida eletromecânica
Linha 15
CAN Tração
J285 Unidade de Controle do Instrumento Combinado
J533 Interface de diagnóstico para o bus de dados
8
Conceito
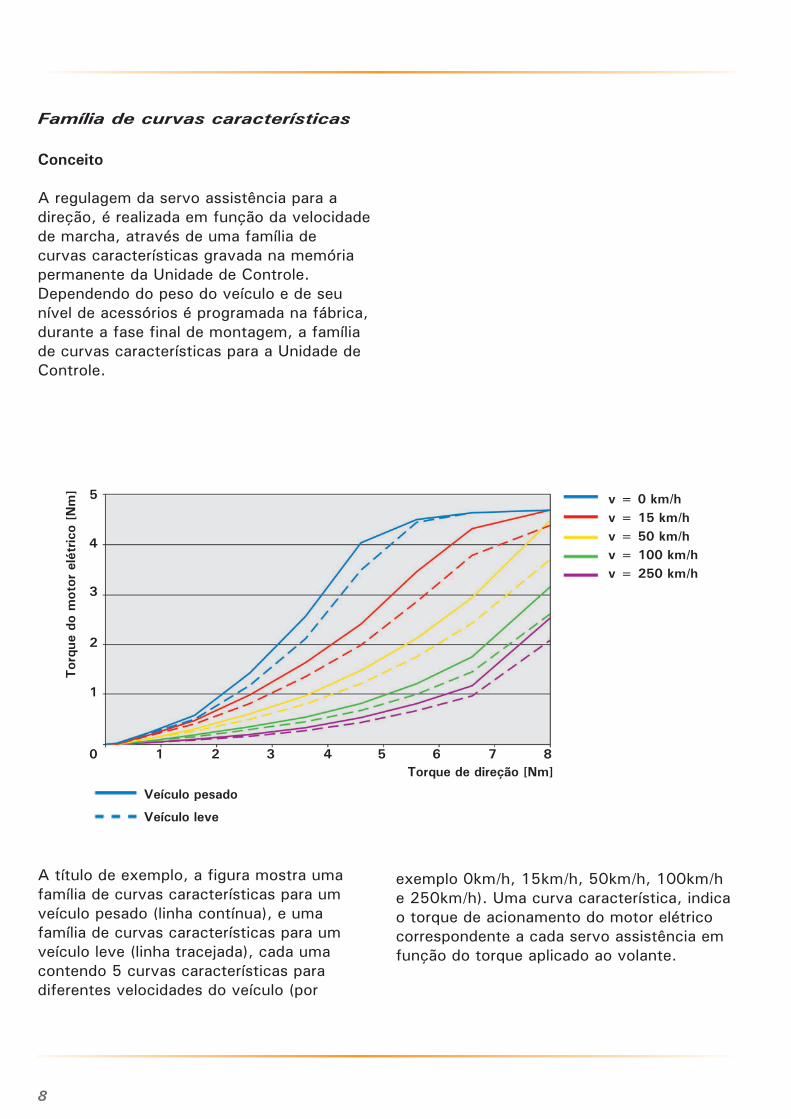
A regulagem da servo assistência para a direção, é realizada em função da velocidade de marcha, através de uma família de curvas características gravada na memória permanente da Unidade de Controle. Dependendo do peso do veículo e de seu nível de acessórios é programada na fábrica, durante a fase final de montagem, a família de curvas características para a Unidade de Controle.
Família de curvas características
A título de exemplo, a figura mostra uma família de curvas características para um veículo pesado (linha contínua), e uma família de curvas características para um veículo leve (linha tracejada), cada uma contendo 5 curvas características para diferentes velocidades do veículo (por
exemplo 0km/h, 15km/h, 50km/h, 100km/h e 250km/h). Uma curva característica, indica o torque de acionamento do motor elétrico correspondente a cada servo assistência em função do torque aplicado ao volante.
v = 0 km/hv = 15 km/hv = 50 km/hv = 100 km/hv = 250 km/h
Tor
que
do m
otor
elé
tric
o [N
m]
Torque de direção [Nm]
5
4
3
2
1
0 1 2 3 4 5 6 7 8
Veículo pesado
Veículo leve

9
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
Estratégias de funcionamento
Princípio de Funcionamento
Torque de giro aplicado ao volante
Servo assistência da direção
Força de direção eficaz
1 - O ciclo de servo assistência, começa no momento em que o condutor move o volante.
2 - O torque de giro aplicado ao volante, faz torcer a barra de torção no pinhão. O sensor de torque de direção G269, mede a intensidade de torção da barra e informa o valor registrado à Unidade de Controle J500.
3 - O sensor de ângulo de direção G85, informa o ângulo momentâneo de esterçamento da direção.
4 - Em função do torque de direção, da velocidade de marcha, do regime de rotação do motor do veículo e da curva característica programada, a Unidade de Controle calcula a servo assistência
necessária para a direção, e estimula correspondentemente o motor elétrico. As informações relativas ao ângulo de direção e a rapidez dos movimentos da direção, são utilizadas para funções como a correção da marcha em linha reta.
5 - A servo assistência da direção, é estabelecida por meio do fuso acionado por porca com esferas recirculantes. O acionamento dessa porca, é feito pelo motor elétrico através de uma correia dentada.
6 - A somatória do torque de giro aplicado ao volante e a força de torque da servo assistência promovida pelo motor elétrico, resulta na força de direção eficaz na cremalheira.
10
Manobra de estacionamento
Torque de giro aplicado ao volante
Servo assistência da direção
Força de direção eficaz
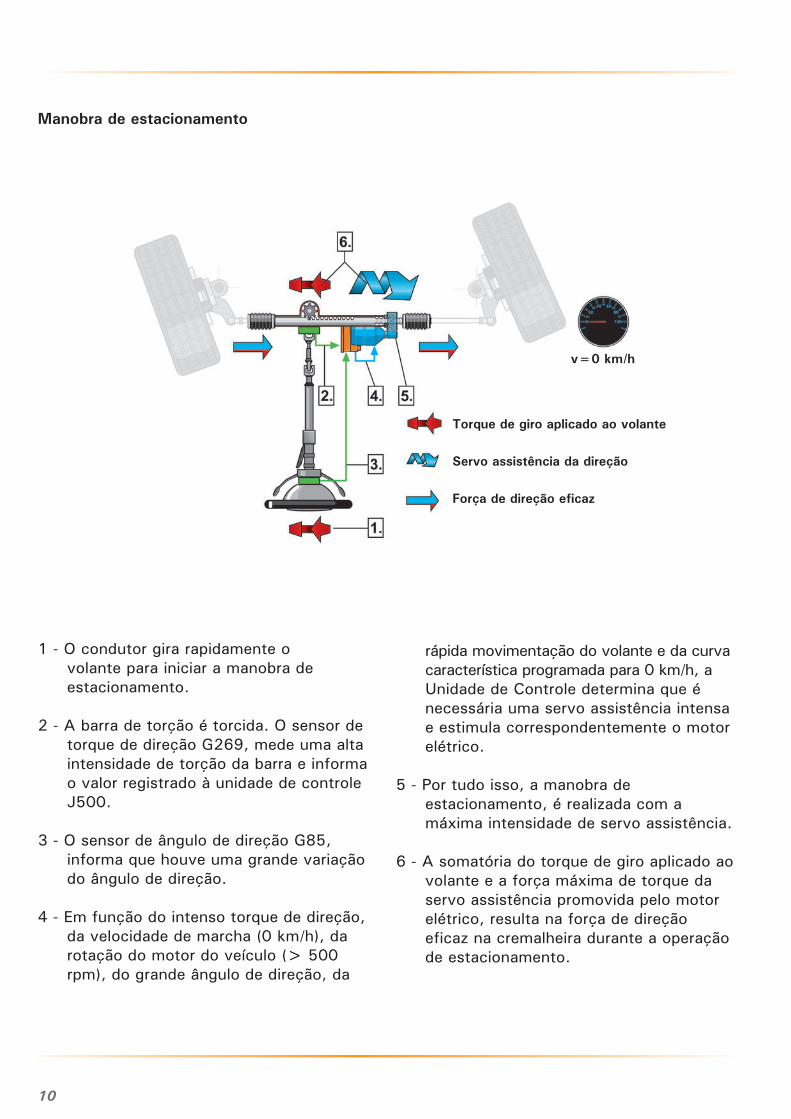
1 - O condutor gira rapidamente o volante para iniciar a manobra de estacionamento.
2 - A barra de torção é torcida. O sensor de torque de direção G269, mede uma alta intensidade de torção da barra e informa o valor registrado à unidade de controle J500.
3 - O sensor de ângulo de direção G85, informa que houve uma grande variação do ângulo de direção.
4 - Em função do intenso torque de direção, da velocidade de marcha (0 km/h), da rotação do motor do veículo (> 500 rpm), do grande ângulo de direção, da
v=0 km/h
rápida movimentação do volante e da curva característica programada para 0 km/h, a Unidade de Controle determina que é necessária uma servo assistência intensa e estimula correspondentemente o motor elétrico.
5 - Por tudo isso, a manobra de estacionamento, é realizada com a máxima intensidade de servo assistência.
6 - A somatória do torque de giro aplicado ao volante e a força máxima de torque da servo assistência promovida pelo motor elétrico, resulta na força de direção eficaz na cremalheira durante a operação de estacionamento.
11
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
Condução em trânsito urbano
Torque de giro aplicado ao volante
Servo assistência da direção
Força de direção eficaz
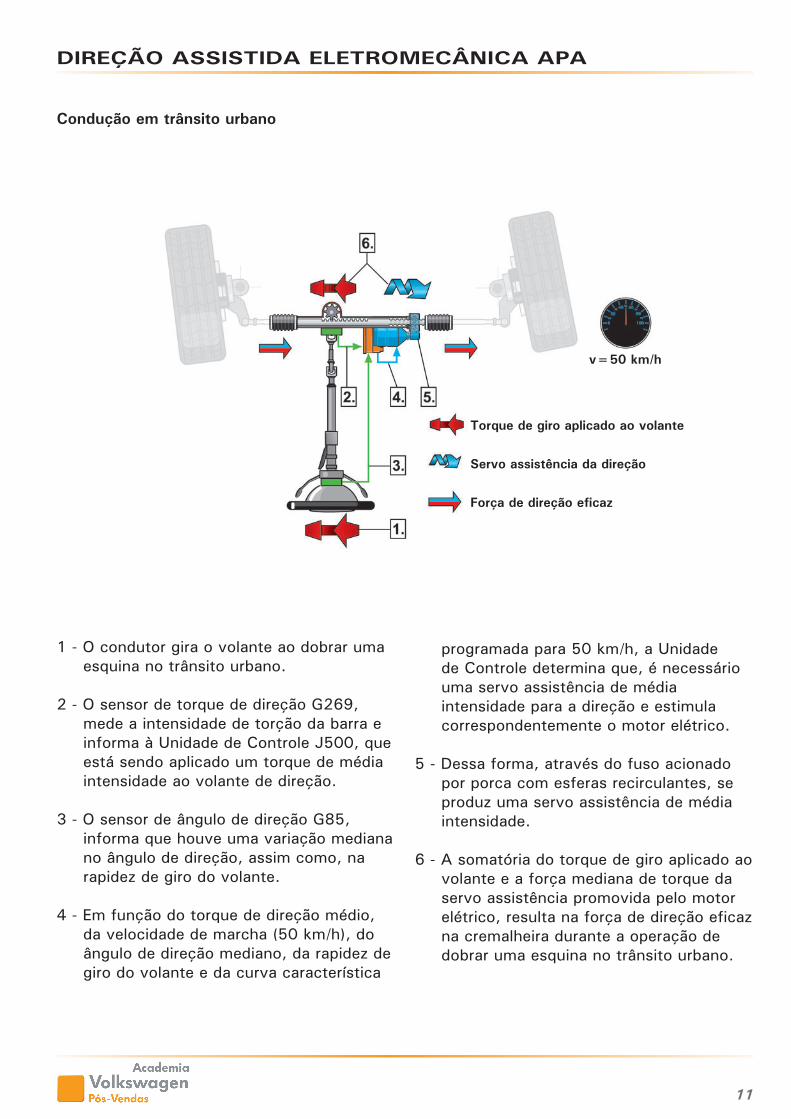
1 - O condutor gira o volante ao dobrar uma esquina no trânsito urbano.
2 - O sensor de torque de direção G269, mede a intensidade de torção da barra e informa à Unidade de Controle J500, que está sendo aplicado um torque de média intensidade ao volante de direção.
3 - O sensor de ângulo de direção G85, informa que houve uma variação mediana no ângulo de direção, assim como, na rapidez de giro do volante.
4 - Em função do torque de direção médio, da velocidade de marcha (50 km/h), do ângulo de direção mediano, da rapidez de giro do volante e da curva característica
programada para 50 km/h, a Unidade de Controle determina que, é necessário uma servo assistência de média intensidade para a direção e estimula correspondentemente o motor elétrico.
5 - Dessa forma, através do fuso acionado por porca com esferas recirculantes, se produz uma servo assistência de média intensidade.
6 - A somatória do torque de giro aplicado ao volante e a força mediana de torque da servo assistência promovida pelo motor elétrico, resulta na força de direção eficaz na cremalheira durante a operação de dobrar uma esquina no trânsito urbano.
v=50 km/h

12
Condução em rodovia
Torque de giro aplicado ao volante
Servo assistência da direção
Força de direção eficaz
1 - Ao mudar de pista, o condutor produz um leve movimento no volante.
2 - O sensor de torque de direção G269, mede a intensidade de torção da barra e informa à Unidade de Controle J500, que está sendo aplicado um torque de baixa intensidade ao volante de direção.
3 - O sensor de ângulo de direção G85, informa que houve uma variação pequena no ângulo de direção, assim como, na rapidez de giro do volante.
4 - Em função do torque de direção baixo, da velocidade de marcha (100 km/h), do ângulo de direção pequeno, da rapidez de giro do volante e da curva característica programada para 100 km/h, a Unidade
de Controle determina que, é necessário uma servo assistência de baixa intensidade para a direção e estimula correspondentemente o motor elétrico.
5 - Ao mover o volante em rodovia, é produzida uma baixa servo assistência da direção, ou talvez não se produz servo assistência através do fuso acionado por porca com esferas recirculantes.
6 - A somatória do torque de giro aplicado ao volante e a pequena força de torque da servo assistência promovida pelo motor elétrico, resulta na força de direção eficaz na cremalheira durante a operação de mudar de faixa numa rodovia a 100 km/h.
v=100 km/h
13
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
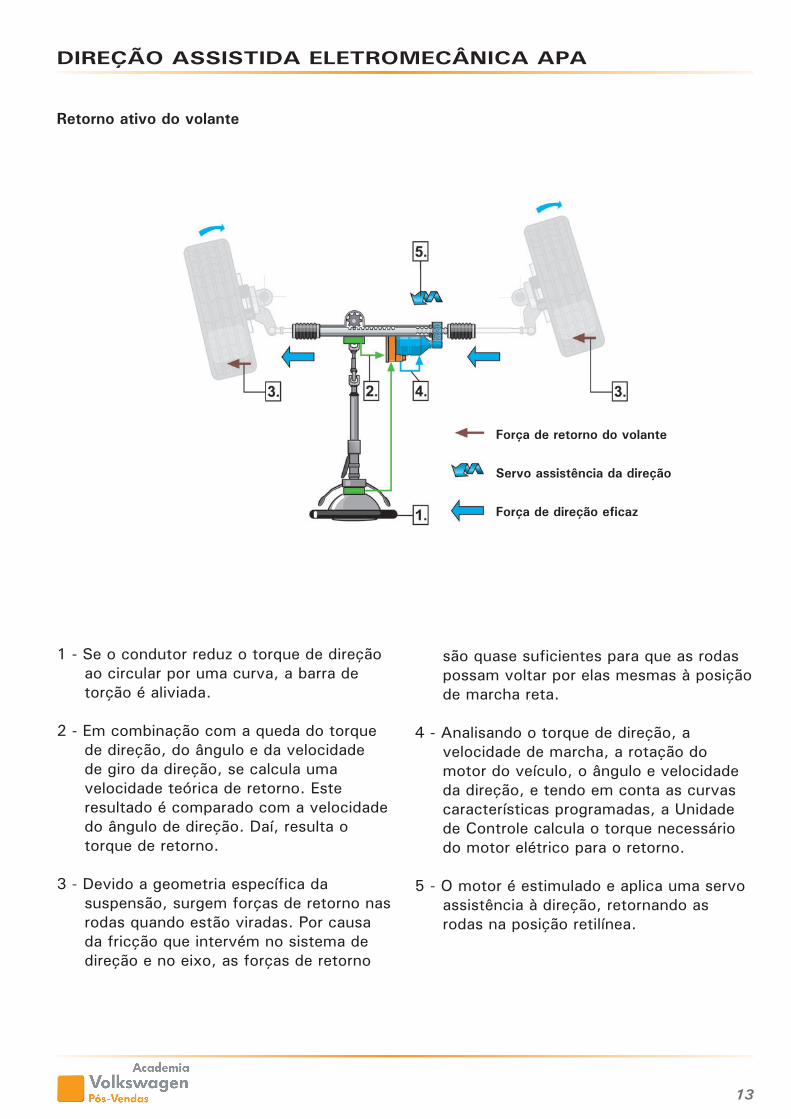
Retorno ativo do volante
Força de retorno do volante
Servo assistência da direção
Força de direção eficaz
1 - Se o condutor reduz o torque de direção ao circular por uma curva, a barra de torção é aliviada.
2 - Em combinação com a queda do torque de direção, do ângulo e da velocidade de giro da direção, se calcula uma velocidade teórica de retorno. Este resultado é comparado com a velocidade do ângulo de direção. Daí, resulta o torque de retorno.
3 - Devido a geometria específica da suspensão, surgem forças de retorno nas rodas quando estão viradas. Por causa da fricção que intervém no sistema de direção e no eixo, as forças de retorno
são quase suficientes para que as rodas possam voltar por elas mesmas à posição de marcha reta.
4 - Analisando o torque de direção, a velocidade de marcha, a rotação do motor do veículo, o ângulo e velocidade da direção, e tendo em conta as curvas características programadas, a Unidade de Controle calcula o torque necessário do motor elétrico para o retorno.
5 - O motor é estimulado e aplica uma servo assistência à direção, retornando as rodas na posição retilínea.
14
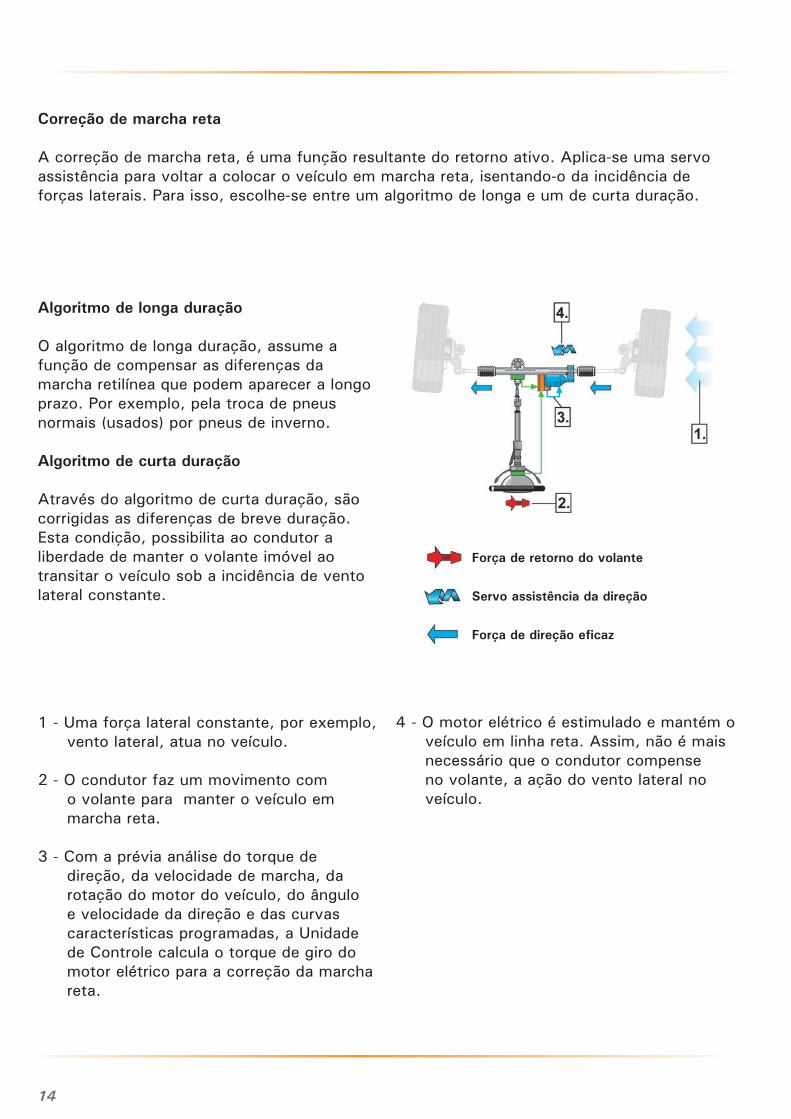
Correção de marcha reta
A correção de marcha reta, é uma função resultante do retorno ativo. Aplica-se uma servo assistência para voltar a colocar o veículo em marcha reta, isentando-o da incidência de forças laterais. Para isso, escolhe-se entre um algoritmo de longa e um de curta duração.
Força de retorno do volante
Servo assistência da direção
Força de direção eficaz
1 - Uma força lateral constante, por exemplo, vento lateral, atua no veículo.
2 - O condutor faz um movimento com o volante para manter o veículo em marcha reta.
3 - Com a prévia análise do torque de direção, da velocidade de marcha, da rotação do motor do veículo, do ângulo e velocidade da direção e das curvas características programadas, a Unidade de Controle calcula o torque de giro do motor elétrico para a correção da marcha reta.
4 - O motor elétrico é estimulado e mantém o veículo em linha reta. Assim, não é mais necessário que o condutor compense no volante, a ação do vento lateral no veículo.
Algoritmo de longa duração
O algoritmo de longa duração, assume a função de compensar as diferenças da marcha retilínea que podem aparecer a longo prazo. Por exemplo, pela troca de pneus normais (usados) por pneus de inverno.
Algoritmo de curta duração
Através do algoritmo de curta duração, são corrigidas as diferenças de breve duração. Esta condição, possibilita ao condutor a liberdade de manter o volante imóvel ao transitar o veículo sob a incidência de vento lateral constante.
15
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
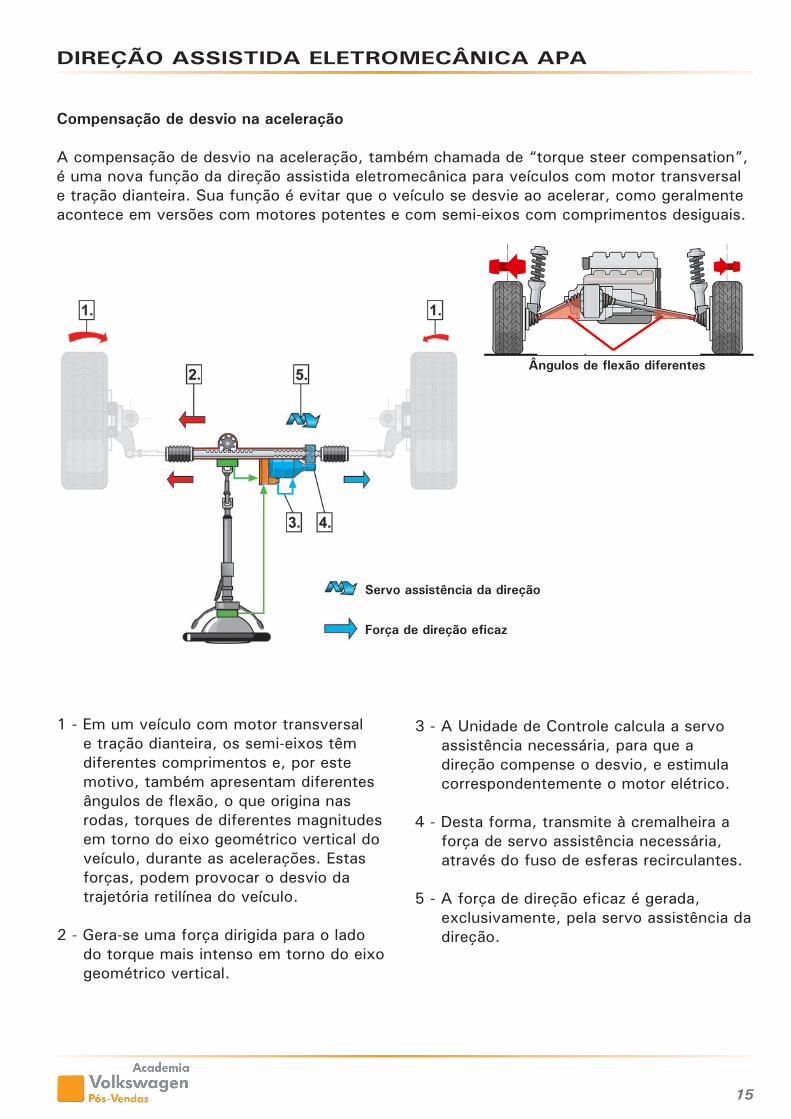
Compensação de desvio na aceleração
A compensação de desvio na aceleração, também chamada de “torque steer compensation”, é uma nova função da direção assistida eletromecânica para veículos com motor transversal e tração dianteira. Sua função é evitar que o veículo se desvie ao acelerar, como geralmente acontece em versões com motores potentes e com semi-eixos com comprimentos desiguais.
1 - Em um veículo com motor transversal e tração dianteira, os semi-eixos têm diferentes comprimentos e, por este motivo, também apresentam diferentes ângulos de flexão, o que origina nas rodas, torques de diferentes magnitudes em torno do eixo geométrico vertical do veículo, durante as acelerações. Estas forças, podem provocar o desvio da trajetória retilínea do veículo.
2 - Gera-se uma força dirigida para o lado do torque mais intenso em torno do eixo geométrico vertical.
3 - A Unidade de Controle calcula a servo assistência necessária, para que a direção compense o desvio, e estimula correspondentemente o motor elétrico.
4 - Desta forma, transmite à cremalheira a força de servo assistência necessária, através do fuso de esferas recirculantes.
5 - A força de direção eficaz é gerada, exclusivamente, pela servo assistência da direção.
Ângulos de flexão diferentes
Servo assistência da direção
Força de direção eficaz
16
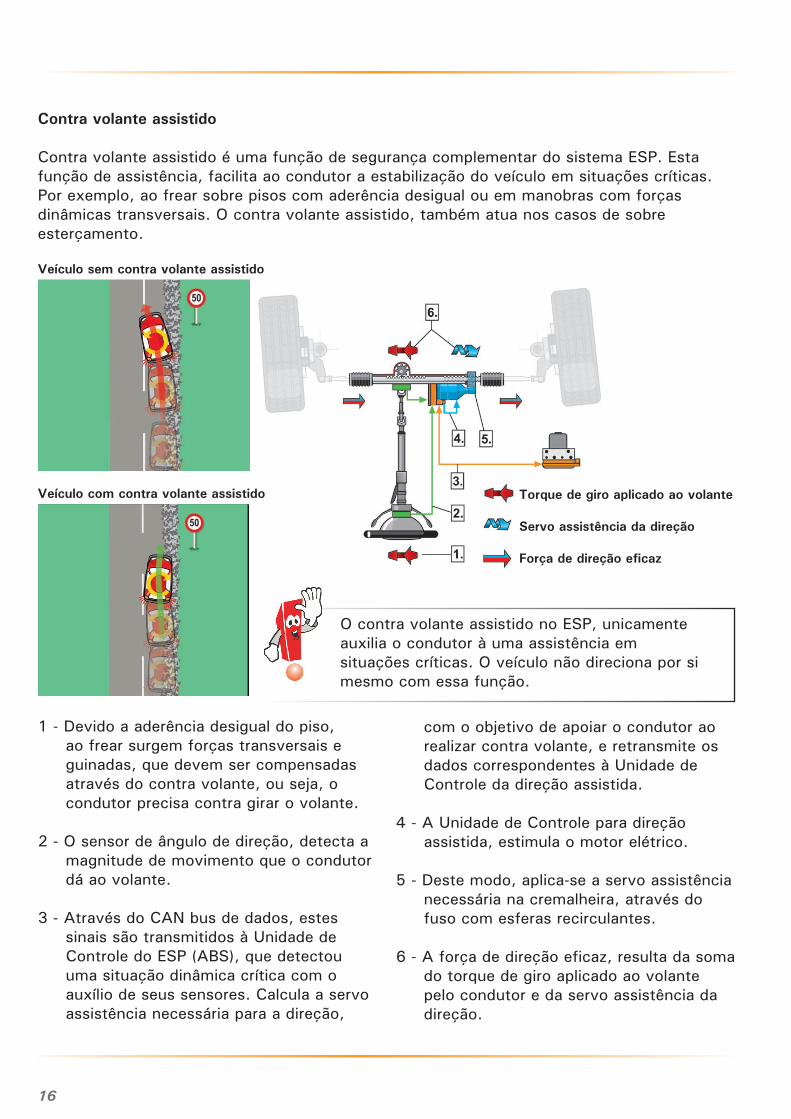
Contra volante assistido
Contra volante assistido é uma função de segurança complementar do sistema ESP. Esta função de assistência, facilita ao condutor a estabilização do veículo em situações críticas. Por exemplo, ao frear sobre pisos com aderência desigual ou em manobras com forças dinâmicas transversais. O contra volante assistido, também atua nos casos de sobre esterçamento.
1 - Devido a aderência desigual do piso, ao frear surgem forças transversais e guinadas, que devem ser compensadas através do contra volante, ou seja, o condutor precisa contra girar o volante.
2 - O sensor de ângulo de direção, detecta a magnitude de movimento que o condutor dá ao volante.
3 - Através do CAN bus de dados, estes sinais são transmitidos à Unidade de Controle do ESP (ABS), que detectou uma situação dinâmica crítica com o auxílio de seus sensores. Calcula a servo assistência necessária para a direção,
Veículo com contra volante assistido
com o objetivo de apoiar o condutor ao realizar contra volante, e retransmite os dados correspondentes à Unidade de Controle da direção assistida.
4 - A Unidade de Controle para direção assistida, estimula o motor elétrico.
5 - Deste modo, aplica-se a servo assistência necessária na cremalheira, através do fuso com esferas recirculantes.
6 - A força de direção eficaz, resulta da soma do torque de giro aplicado ao volante pelo condutor e da servo assistência da direção.
Torque de giro aplicado ao volante
Servo assistência da direção
Força de direção eficaz
Veículo sem contra volante assistido
O contra volante assistido no ESP, unicamente auxilia o condutor à uma assistência em situações críticas. O veículo não direciona por si mesmo com essa função.
17
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
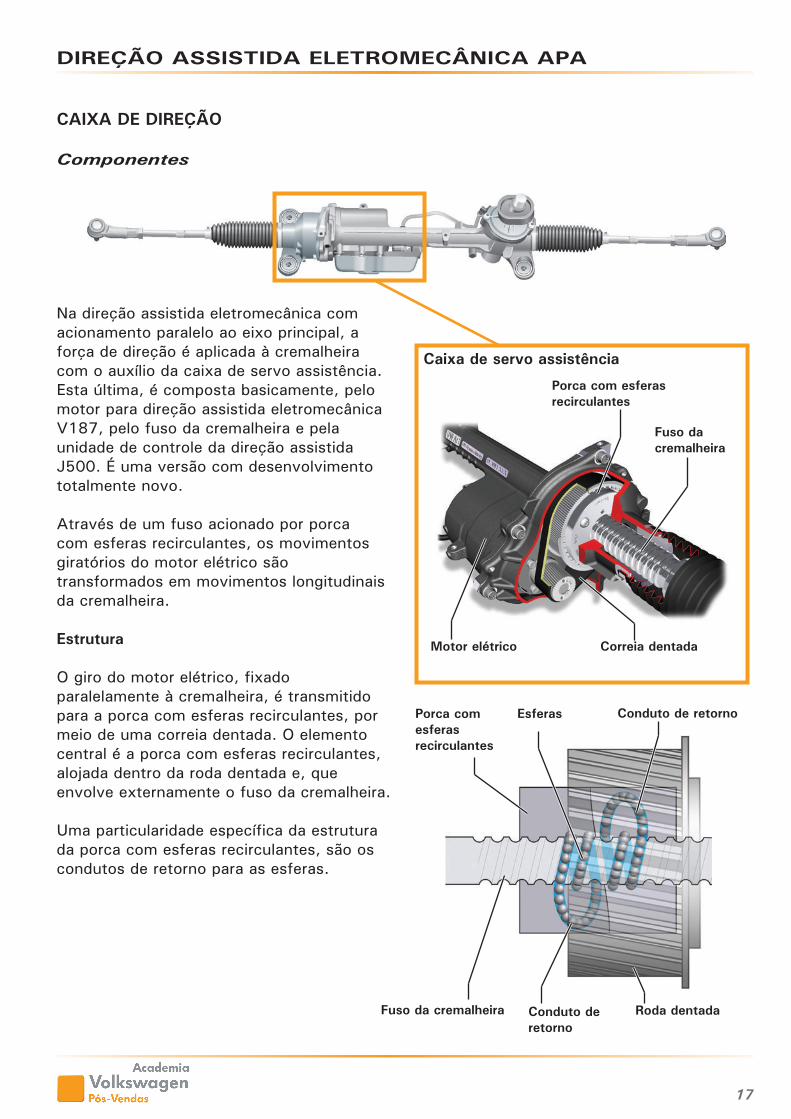
Na direção assistida eletromecânica com acionamento paralelo ao eixo principal, a força de direção é aplicada à cremalheira com o auxílio da caixa de servo assistência. Esta última, é composta basicamente, pelo motor para direção assistida eletromecânica V187, pelo fuso da cremalheira e pela unidade de controle da direção assistida J500. É uma versão com desenvolvimento totalmente novo.
Através de um fuso acionado por porca com esferas recirculantes, os movimentos giratórios do motor elétrico são transformados em movimentos longitudinais da cremalheira.
Estrutura
O giro do motor elétrico, fixado paralelamente à cremalheira, é transmitido para a porca com esferas recirculantes, por meio de uma correia dentada. O elemento central é a porca com esferas recirculantes, alojada dentro da roda dentada e, que envolve externamente o fuso da cremalheira.
Uma particularidade específica da estrutura da porca com esferas recirculantes, são os condutos de retorno para as esferas.
CAIXA DE DIREÇÃO
Componentes
Fuso da cremalheira
Caixa de servo assistência
Porca com esferas recirculantes
Fuso da cremalheira
Motor elétrico Correia dentada
Esferas
Conduto de retorno
Roda dentada
Conduto de retornoPorca com esferas recirculantes
18
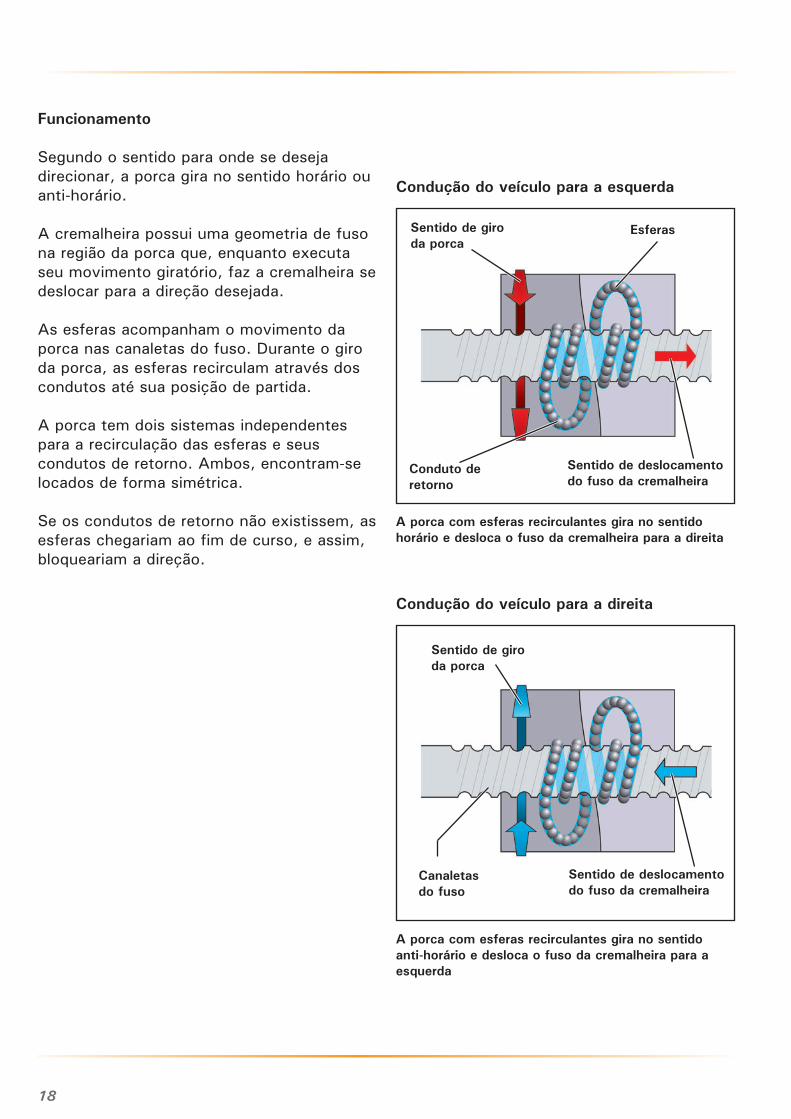
Funcionamento
Segundo o sentido para onde se deseja direcionar, a porca gira no sentido horário ou anti-horário.
A cremalheira possui uma geometria de fuso na região da porca que, enquanto executa seu movimento giratório, faz a cremalheira se deslocar para a direção desejada.
As esferas acompanham o movimento da porca nas canaletas do fuso. Durante o giro da porca, as esferas recirculam através dos condutos até sua posição de partida.
A porca tem dois sistemas independentes para a recirculação das esferas e seus condutos de retorno. Ambos, encontram-se locados de forma simétrica.
Se os condutos de retorno não existissem, as esferas chegariam ao fim de curso, e assim, bloqueariam a direção.
Sentido de deslocamento do fuso da cremalheira
Sentido de deslocamento do fuso da cremalheira
Condução do veículo para a esquerda
Condução do veículo para a direita
Sentido de giro da porca
Sentido de giro da porca
Esferas
Conduto de retorno
A porca com esferas recirculantes gira no sentido anti-horário e desloca o fuso da cremalheira para a esquerda
A porca com esferas recirculantes gira no sentido horário e desloca o fuso da cremalheira para a direita
Canaletas do fuso
19
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
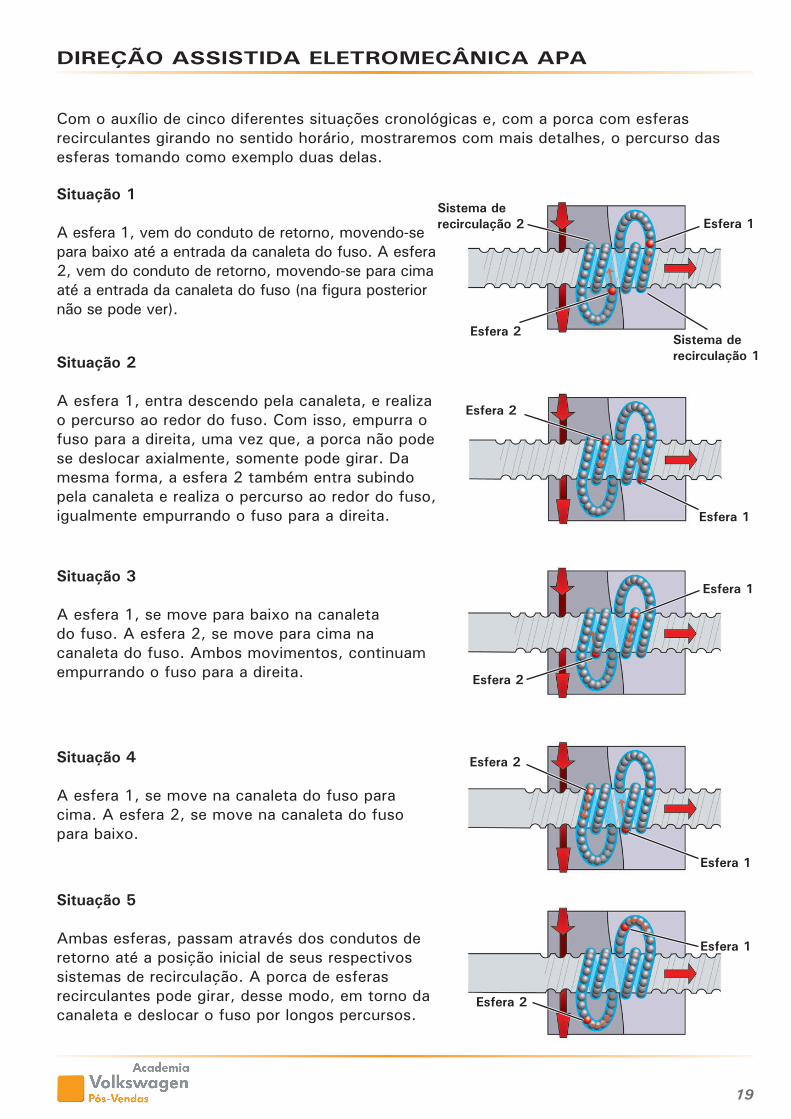
Situação 5
Ambas esferas, passam através dos condutos de retorno até a posição inicial de seus respectivos sistemas de recirculação. A porca de esferas recirculantes pode girar, desse modo, em torno da canaleta e deslocar o fuso por longos percursos.
Esfera 2
Esfera 2
Sistema de recirculação 2
Sistema de recirculação 1
Esfera 1
Esfera 1
Esfera 1
Esfera 1
Esfera 1
Esfera 2
Esfera 2
Esfera 2
Com o auxílio de cinco diferentes situações cronológicas e, com a porca com esferas recirculantes girando no sentido horário, mostraremos com mais detalhes, o percurso das esferas tomando como exemplo duas delas.
Situação 1
A esfera 1, vem do conduto de retorno, movendo-se para baixo até a entrada da canaleta do fuso. A esfera 2, vem do conduto de retorno, movendo-se para cima até a entrada da canaleta do fuso (na figura posterior não se pode ver).
Situação 2
A esfera 1, entra descendo pela canaleta, e realiza o percurso ao redor do fuso. Com isso, empurra o fuso para a direita, uma vez que, a porca não pode se deslocar axialmente, somente pode girar. Da mesma forma, a esfera 2 também entra subindo pela canaleta e realiza o percurso ao redor do fuso, igualmente empurrando o fuso para a direita.
Situação 3
A esfera 1, se move para baixo na canaleta do fuso. A esfera 2, se move para cima na canaleta do fuso. Ambos movimentos, continuam empurrando o fuso para a direita.
Situação 4
A esfera 1, se move na canaleta do fuso para cima. A esfera 2, se move na canaleta do fuso para baixo.
20
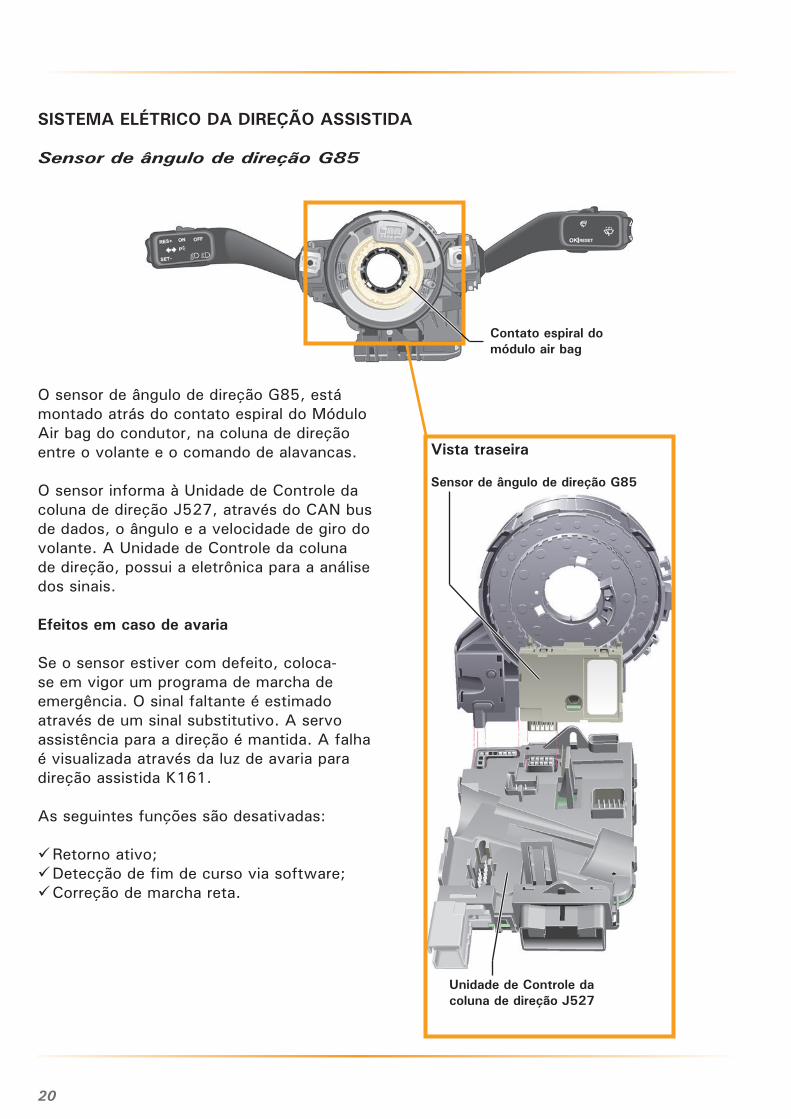
O sensor de ângulo de direção G85, está montado atrás do contato espiral do Módulo Air bag do condutor, na coluna de direção entre o volante e o comando de alavancas.
O sensor informa à Unidade de Controle da coluna de direção J527, através do CAN bus de dados, o ângulo e a velocidade de giro do volante. A Unidade de Controle da coluna de direção, possui a eletrônica para a análise dos sinais.
Efeitos em caso de avaria
Se o sensor estiver com defeito, coloca-se em vigor um programa de marcha de emergência. O sinal faltante é estimado através de um sinal substitutivo. A servo assistência para a direção é mantida. A falha é visualizada através da luz de avaria para direção assistida K161.
As seguintes funções são desativadas:
Retorno ativo; 9Detecção de fim de curso via software; 9Correção de marcha reta. 9
Sensor de ângulo de direção G85
SISTEMA ELÉTRICO DA DIREÇÃO ASSISTIDA
Vista traseira
Sensor de ângulo de direção G85
Unidade de Controle da coluna de direção J527
Contato espiral do módulo air bag
21
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
Funcionamento
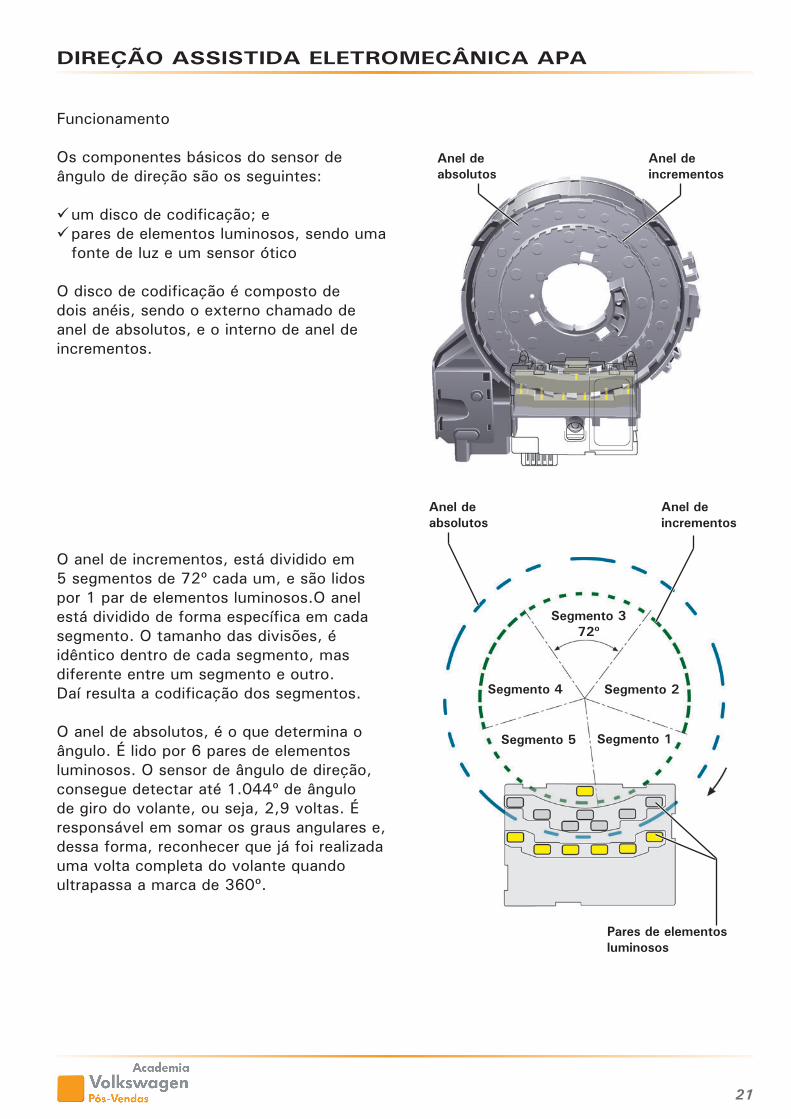
Os componentes básicos do sensor de ângulo de direção são os seguintes:
um disco de codificação; e 9pares de elementos luminosos, sendo uma 9fonte de luz e um sensor ótico
O disco de codificação é composto de dois anéis, sendo o externo chamado de anel de absolutos, e o interno de anel de incrementos.
O anel de incrementos, está dividido em 5 segmentos de 72º cada um, e são lidos por 1 par de elementos luminosos.O anel está dividido de forma específica em cada segmento. O tamanho das divisões, é idêntico dentro de cada segmento, mas diferente entre um segmento e outro. Daí resulta a codificação dos segmentos.
O anel de absolutos, é o que determina o ângulo. É lido por 6 pares de elementos luminosos. O sensor de ângulo de direção, consegue detectar até 1.044º de ângulo de giro do volante, ou seja, 2,9 voltas. É responsável em somar os graus angulares e, dessa forma, reconhecer que já foi realizada uma volta completa do volante quando ultrapassa a marca de 360º.
Segmento 2
Anel de absolutos
Anel de incrementos
Anel de absolutos
Anel de incrementos
Pares de elementos luminosos
Segmento 1Segmento 5
Segmento 3 72º
Segmento 4
22
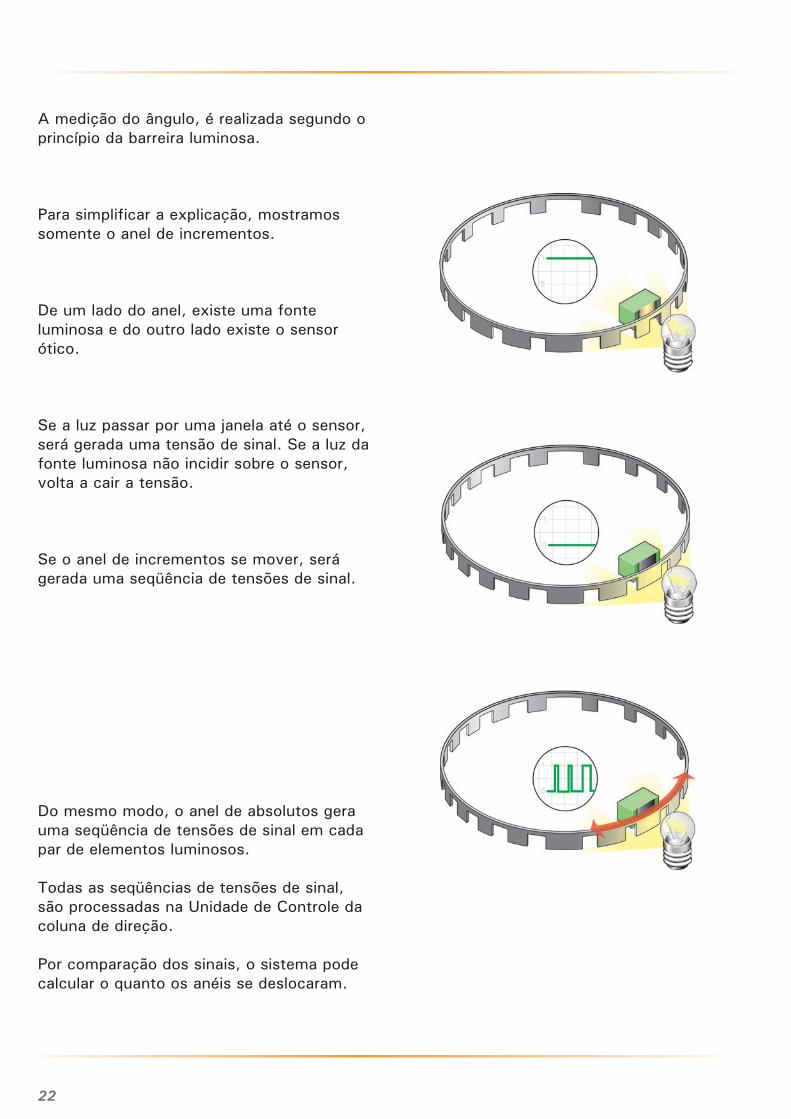
A medição do ângulo, é realizada segundo o princípio da barreira luminosa.
Para simplificar a explicação, mostramos somente o anel de incrementos.
De um lado do anel, existe uma fonte luminosa e do outro lado existe o sensor ótico.
Se a luz passar por uma janela até o sensor, será gerada uma tensão de sinal. Se a luz da fonte luminosa não incidir sobre o sensor, volta a cair a tensão.
Se o anel de incrementos se mover, será gerada uma seqüência de tensões de sinal.
Do mesmo modo, o anel de absolutos gera uma seqüência de tensões de sinal em cada par de elementos luminosos.
Todas as seqüências de tensões de sinal, são processadas na Unidade de Controle da coluna de direção.
Por comparação dos sinais, o sistema pode calcular o quanto os anéis se deslocaram.
23
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
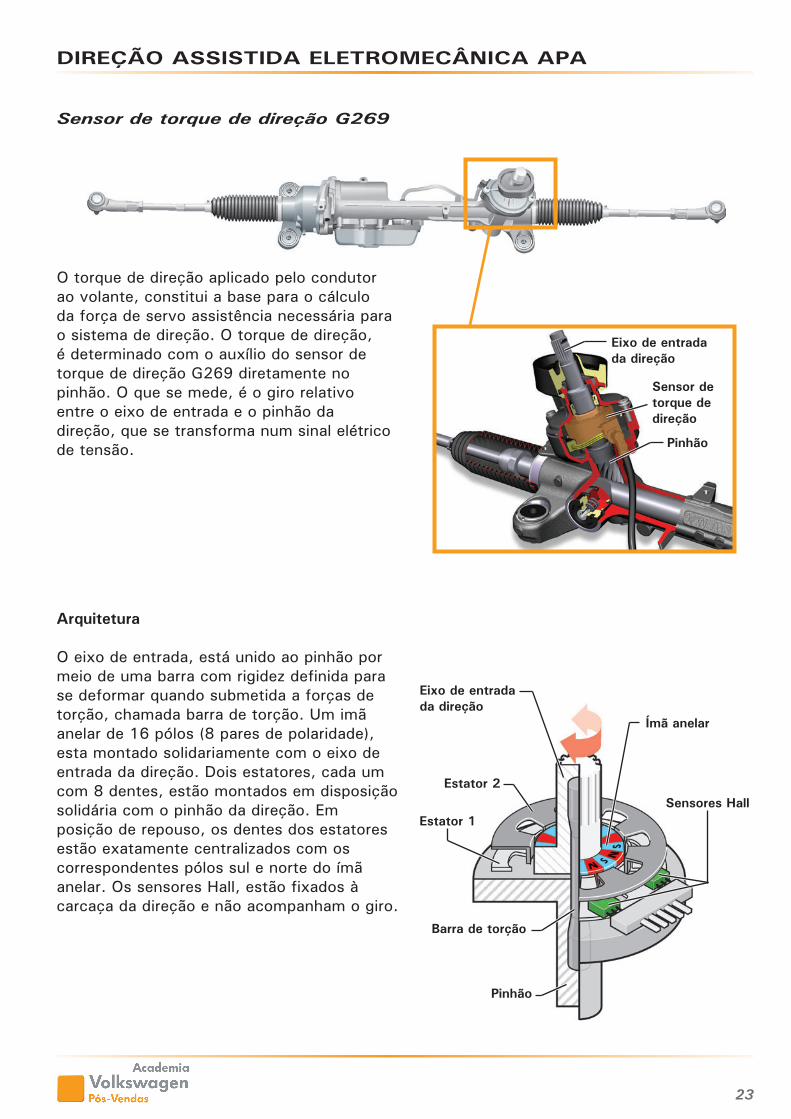
O torque de direção aplicado pelo condutor ao volante, constitui a base para o cálculo da força de servo assistência necessária para o sistema de direção. O torque de direção, é determinado com o auxílio do sensor de torque de direção G269 diretamente no pinhão. O que se mede, é o giro relativo entre o eixo de entrada e o pinhão da direção, que se transforma num sinal elétrico de tensão.
Sensor de torque de direção G269
Sensores Hall
Eixo de entrada da direção
Sensor de torque de direção
Pinhão
Eixo de entrada da direção
Estator 2
Estator 1
Barra de torção
Pinhão
Ímã anelar
Arquitetura
O eixo de entrada, está unido ao pinhão por meio de uma barra com rigidez definida para se deformar quando submetida a forças de torção, chamada barra de torção. Um imã anelar de 16 pólos (8 pares de polaridade), esta montado solidariamente com o eixo de entrada da direção. Dois estatores, cada um com 8 dentes, estão montados em disposição solidária com o pinhão da direção. Em posição de repouso, os dentes dos estatores estão exatamente centralizados com os correspondentes pólos sul e norte do ímã anelar. Os sensores Hall, estão fixados à carcaça da direção e não acompanham o giro.
24
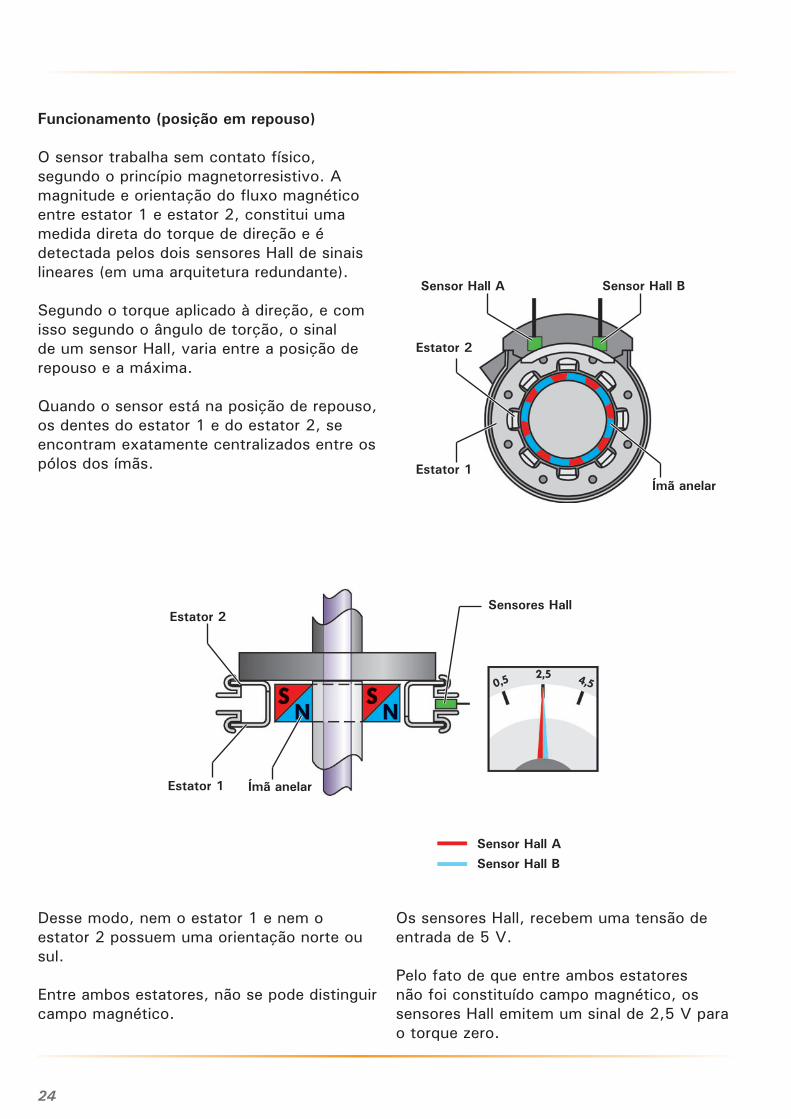
Funcionamento (posição em repouso)
O sensor trabalha sem contato físico, segundo o princípio magnetorresistivo. A magnitude e orientação do fluxo magnético entre estator 1 e estator 2, constitui uma medida direta do torque de direção e é detectada pelos dois sensores Hall de sinais lineares (em uma arquitetura redundante).
Segundo o torque aplicado à direção, e com isso segundo o ângulo de torção, o sinal de um sensor Hall, varia entre a posição de repouso e a máxima.
Quando o sensor está na posição de repouso, os dentes do estator 1 e do estator 2, se encontram exatamente centralizados entre os pólos dos ímãs.
Sensor Hall A Sensor Hall B
Ímã anelarEstator 1
Estator 2
Sensor Hall ASensor Hall B
Estator 2Sensores Hall
Ímã anelarEstator 1
Desse modo, nem o estator 1 e nem o estator 2 possuem uma orientação norte ou sul.
Entre ambos estatores, não se pode distinguir campo magnético.
Os sensores Hall, recebem uma tensão de entrada de 5 V.
Pelo fato de que entre ambos estatores não foi constituído campo magnético, os sensores Hall emitem um sinal de 2,5 V para o torque zero.

25
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
Funcionamento (posição máxima)
Quando o condutor gira o volante, provoca um ângulo de torção entre o eixo de entrada e o pinhão da direção. O ímã anelar, se desloca com relação aos estatores 1 e 2. Quando os oito dentes do estator 1 coincidem exatamente com os pólos norte e, os oito dentes do estator 2 coincidem exatamente com os pólos sul do ímã anelar, se dá o momento de posição máxima do sensor. Isto significa que o estator 1 tem, neste exemplo, uma orientação norte, e o estator 2 uma orientação sul. Entre os dois estatores forma-se um campo magnético, que é detectado pelos sensores Hall e transformado num sinal elétrico.
Enquanto o sensor Hall A emite uma tensão máxima de 4,5 V, o sensor Hall B emite uma tensão mínima de 0,5 V. Se o volante é girado no sentido oposto, o sensor Hall A emite a tensão de 0,5 V e o sensor Hall B emite a tensão de 4,5 V.
Sensor Hall ASensor Hall B
Efeitos em caso de avaria
Se o sensor apresentar defeito, será necessário substituir a caixa de direção. A servo assistência é desativada de forma suave e não repentina. Para conseguir esta desativação suave, a Unidade de Controle calcula um valor substitutivo para o torque
de direção, tomando como referência o ângulo de direção e o ângulo do rotor do motor elétrico. A falha é sinalizada para o condutor, acendendo-se a luz indicadora de avaria em vermelho.
Estator 2
Sensores Hall
Campo magnético
Ímã anelarEstator 1
Sensor Hall A Sensor Hall B
Ímã anelarEstator 1
Estator 2

26
Sensor de rotação do motor G28
É um sensor do tipo Hall.
Aplicações do sinal
Com o sinal deste sensor, a Unidade de Controle do Motor, registra o regime de rotação do motor e a posição exata da árvore de manivelas.
Efeitos em caso de avaria
Se o sensor de rotação do motor falhar, a direção funciona com o borne 15. A avaria, é visualizada através da luz indicadora de avarias da direção assistida eletromecânica K161.
Sinal de velocidade do veículo
O sinal de velocidade de marcha, é fornecido pela Unidade de Controle do ABS, via CAN tração.
Efeitos em caso de avaria
Se o sinal de velocidade de marcha se ausentar, é ativado um programa de marcha de emergência. O condutor contará com a servo assistência plena, mas não contará com a função Servotronic. A avaria, é visualizada através da luz indicadora de avaria para direção assistida eletromecânica K161, que se acende em amarelo.
27
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
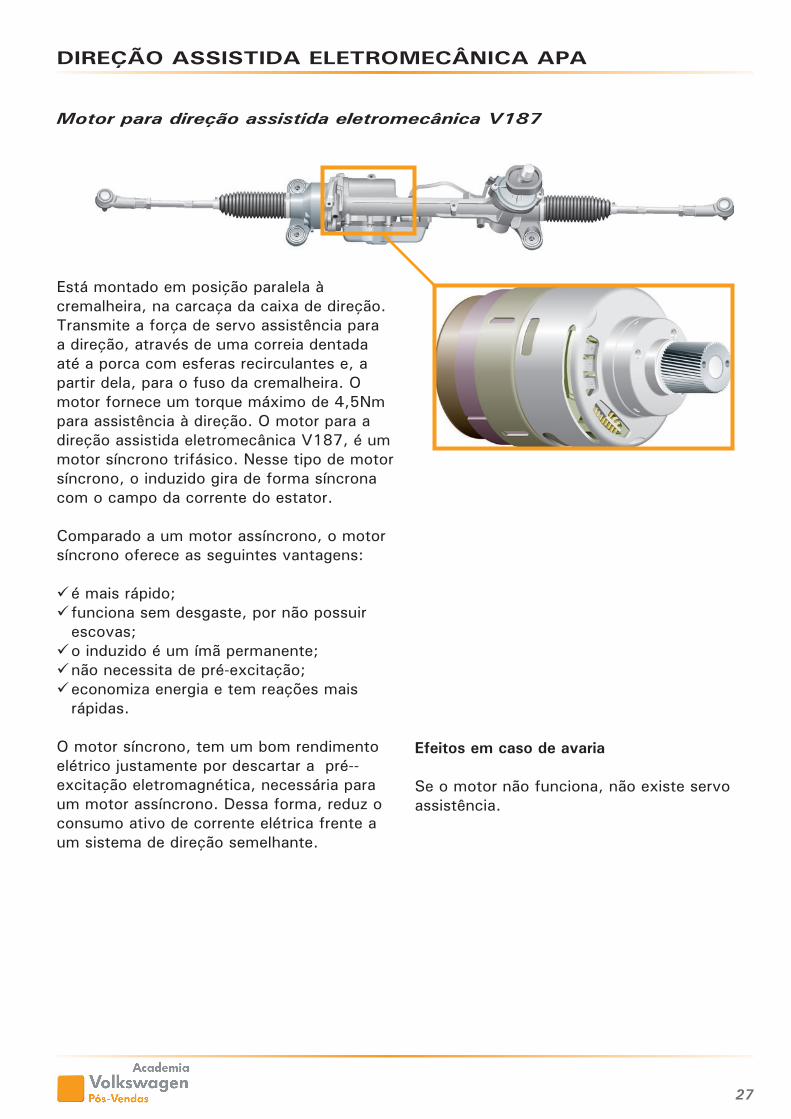
Está montado em posição paralela à cremalheira, na carcaça da caixa de direção. Transmite a força de servo assistência para a direção, através de uma correia dentada até a porca com esferas recirculantes e, a partir dela, para o fuso da cremalheira. O motor fornece um torque máximo de 4,5Nm para assistência à direção. O motor para a direção assistida eletromecânica V187, é um motor síncrono trifásico. Nesse tipo de motor síncrono, o induzido gira de forma síncrona com o campo da corrente do estator.
Comparado a um motor assíncrono, o motor síncrono oferece as seguintes vantagens:
é mais rápido; 9funciona sem desgaste, por não possuir 9escovas;o induzido é um ímã permanente; 9não necessita de pré-excitação; 9economiza energia e tem reações mais 9rápidas.
O motor síncrono, tem um bom rendimento elétrico justamente por descartar a pré--excitação eletromagnética, necessária para um motor assíncrono. Dessa forma, reduz o consumo ativo de corrente elétrica frente a um sistema de direção semelhante.
Motor para direção assistida eletromecânica V187
Efeitos em caso de avaria
Se o motor não funciona, não existe servo assistência.
28
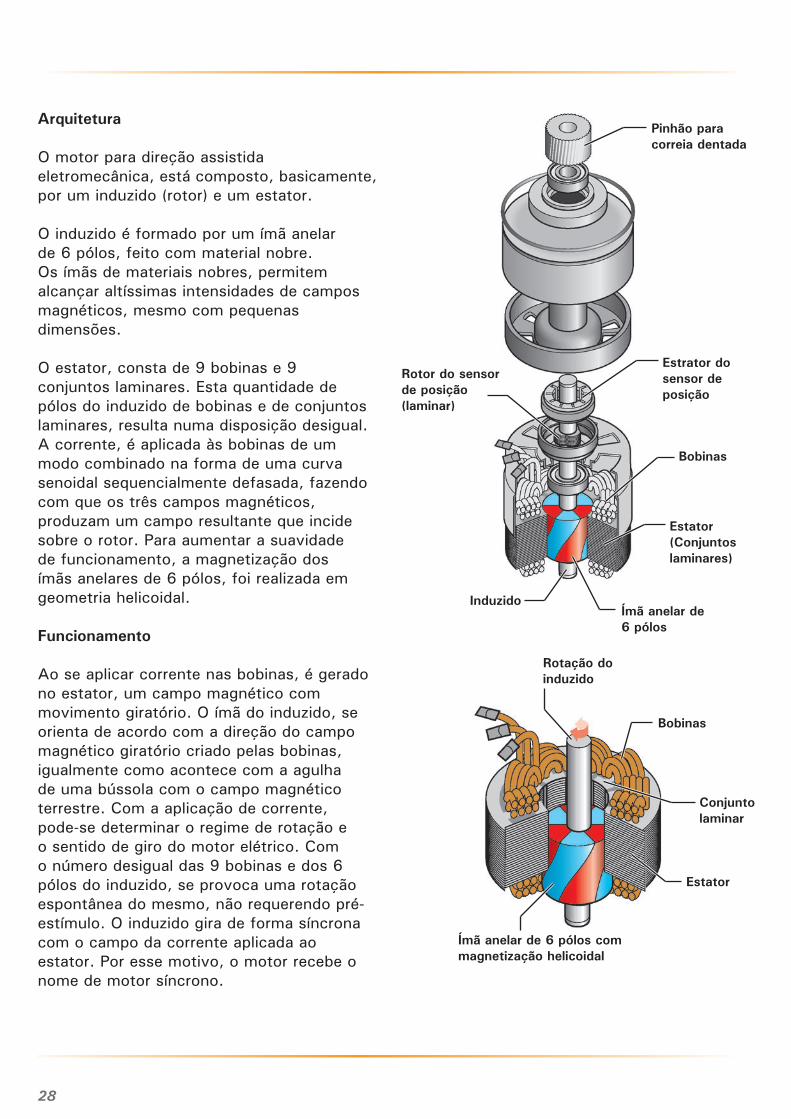
Ímã anelar de 6 pólos com magnetização helicoidal
Arquitetura
O motor para direção assistida eletromecânica, está composto, basicamente, por um induzido (rotor) e um estator.
O induzido é formado por um ímã anelar de 6 pólos, feito com material nobre. Os ímãs de materiais nobres, permitem alcançar altíssimas intensidades de campos magnéticos, mesmo com pequenas dimensões.
O estator, consta de 9 bobinas e 9 conjuntos laminares. Esta quantidade de pólos do induzido de bobinas e de conjuntos laminares, resulta numa disposição desigual. A corrente, é aplicada às bobinas de um modo combinado na forma de uma curva senoidal sequencialmente defasada, fazendo com que os três campos magnéticos, produzam um campo resultante que incide sobre o rotor. Para aumentar a suavidade de funcionamento, a magnetização dos ímãs anelares de 6 pólos, foi realizada em geometria helicoidal.
Funcionamento
Ao se aplicar corrente nas bobinas, é gerado no estator, um campo magnético com movimento giratório. O ímã do induzido, se orienta de acordo com a direção do campo magnético giratório criado pelas bobinas, igualmente como acontece com a agulha de uma bússola com o campo magnético terrestre. Com a aplicação de corrente, pode-se determinar o regime de rotação e o sentido de giro do motor elétrico. Com o número desigual das 9 bobinas e dos 6 pólos do induzido, se provoca uma rotação espontânea do mesmo, não requerendo pré-estímulo. O induzido gira de forma síncrona com o campo da corrente aplicada ao estator. Por esse motivo, o motor recebe o nome de motor síncrono.
Pinhão para correia dentada
Rotor do sensor de posição (laminar)
Estrator do sensor de posição
Bobinas
Ímã anelar de 6 pólos
Induzido
Estator (Conjuntos laminares)
Rotação do induzido
Bobinas
Conjunto laminar
Estator
29
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
Sensor de posição do motor
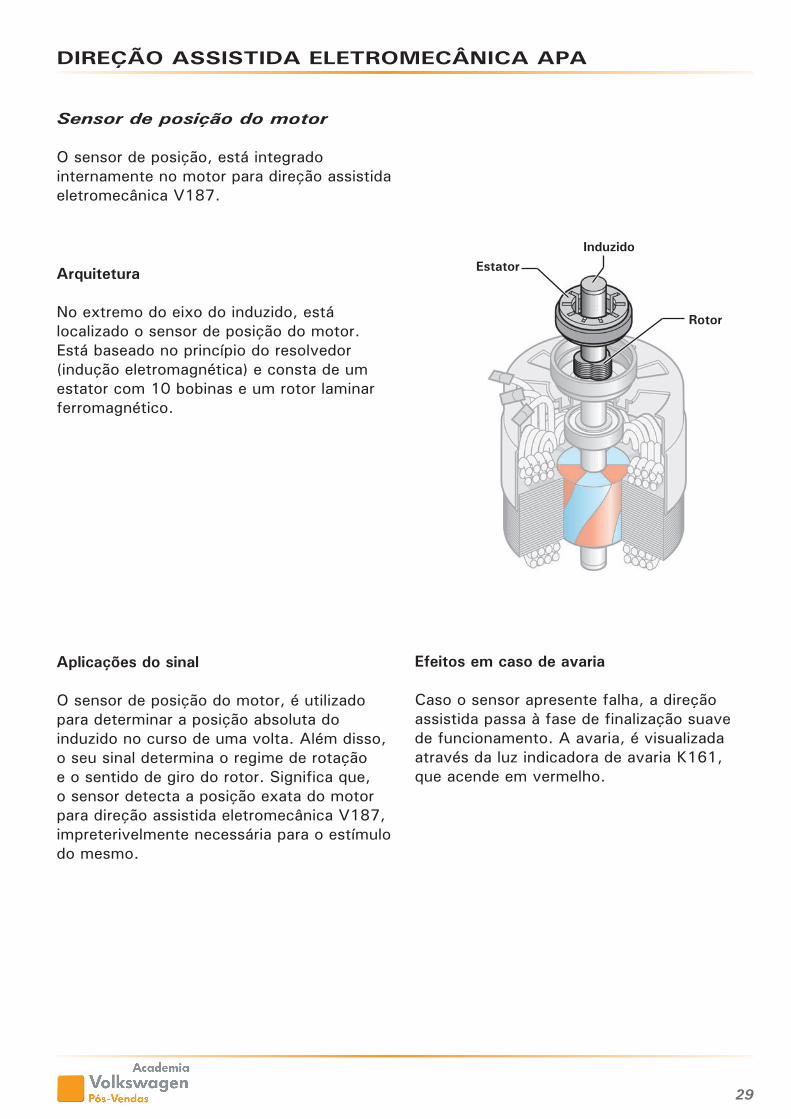
O sensor de posição, está integrado internamente no motor para direção assistida eletromecânica V187.
EstatorArquitetura
No extremo do eixo do induzido, está localizado o sensor de posição do motor. Está baseado no princípio do resolvedor (indução eletromagnética) e consta de um estator com 10 bobinas e um rotor laminar ferromagnético.
Aplicações do sinal
O sensor de posição do motor, é utilizado para determinar a posição absoluta do induzido no curso de uma volta. Além disso, o seu sinal determina o regime de rotação e o sentido de giro do rotor. Significa que, o sensor detecta a posição exata do motor para direção assistida eletromecânica V187, impreterivelmente necessária para o estímulo do mesmo.
Efeitos em caso de avaria
Caso o sensor apresente falha, a direção assistida passa à fase de finalização suave de funcionamento. A avaria, é visualizada através da luz indicadora de avaria K161, que acende em vermelho.
Induzido
Rotor

30
A Unidade de Controle, está integrada à caixa de direção. Os contatos da Unidade de Controle são soldados com o motor elétrico, motivo pelo qual, são inseparáveis.
Unidade de Controle para direção assistida J500
Baseando-se nos sinais de entrada tais como:
o sinal do sensor do ângulo de direção G85; 9o sinal de rotação do motor G28; 9o torque de direção e o regime de rotação 9do motor elétrico;assim como o sinal de velocidade do 9veículo.
A Unidade de Controle, determina a magnitude da servo assistência que é necessária a cada momento. O sistema calcula a intensidade de corrente e o sentido de giro da corrente do estator, estimulando correspondentemente o motor V187.
Efeitos em caso de avaria
A Unidade de Controle, possui integrado um termosensor para detectar a temperatura do sistema da direção. Se a temperatura supera os 100º C, a servo assistência para a direção, é reduzida de forma contínua. Se a servo assistência é reduzida a um valor inferior a 60%, a luz indicadora de avaria K161 é acendida em amarelo.
Se a Unidade de Controle for danificada, terá que substituir a caixa de direção completa.
31
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
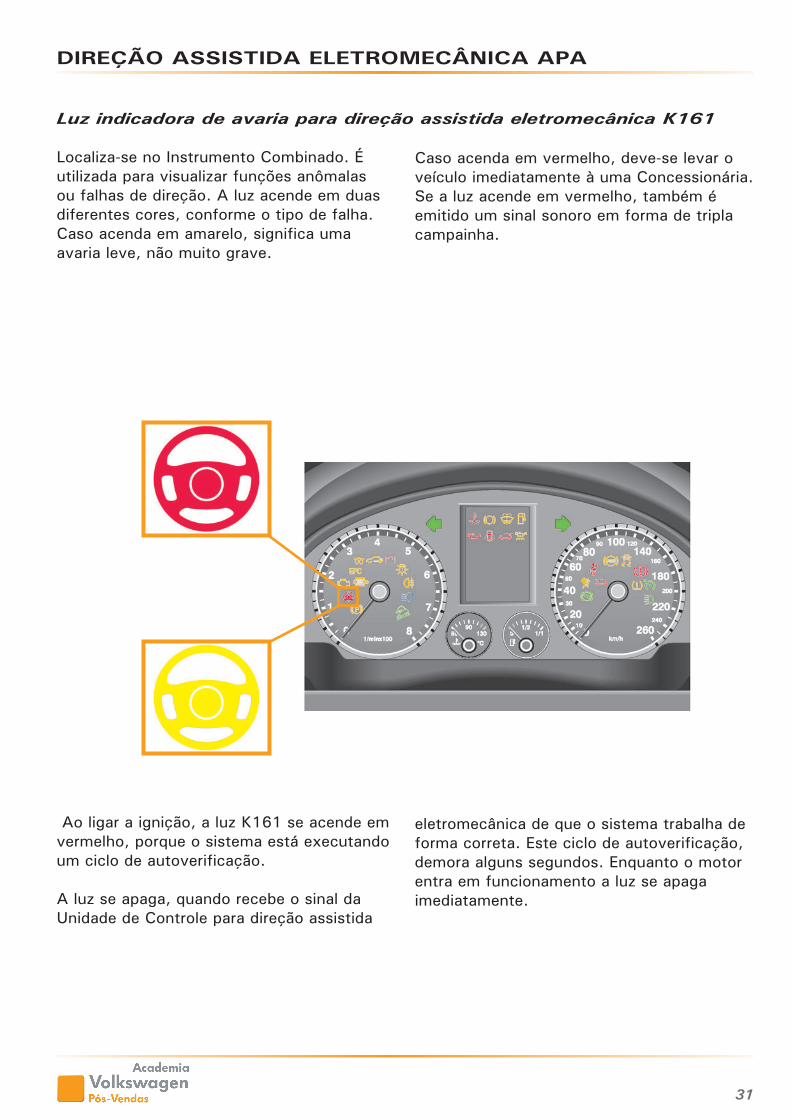
Localiza-se no Instrumento Combinado. É utilizada para visualizar funções anômalas ou falhas de direção. A luz acende em duas diferentes cores, conforme o tipo de falha. Caso acenda em amarelo, significa uma avaria leve, não muito grave.
Caso acenda em vermelho, deve-se levar o veículo imediatamente à uma Concessionária. Se a luz acende em vermelho, também é emitido um sinal sonoro em forma de tripla campainha.
Luz indicadora de avaria para direção assistida eletromecânica K161
Ao ligar a ignição, a luz K161 se acende em vermelho, porque o sistema está executando um ciclo de autoverificação.
A luz se apaga, quando recebe o sinal da Unidade de Controle para direção assistida
eletromecânica de que o sistema trabalha de forma correta. Este ciclo de autoverificação, demora alguns segundos. Enquanto o motor entra em funcionamento a luz se apaga imediatamente.
32
Particularidades
Rebocamento por outro veículo
Pressupondo que:
a velocidade de marcha é superior a 9 7km/h; e a ignição está ligada. 9
Ao rebocar o veículo, é produzida uma servo assistência da direção.
Bateria descarregada
O sistema detecta uma tensão subnormal e reage diante disso. Se a tensão da bateria desce a 9 V, reduz a magnitude da servo assistência e, a luz indicadora de avaria K161 acende em amarelo. Se a tensão desce abaixo de 9 V, é desativada a servo assistência e, a luz indicadora de avaria K161 acende em vermelho. Caso hajam quedas breves da tensão abaixo de 9 V, a luz indicadora de avaria K161 acenderá em amarelo.
Autoadaptação dos topes limites de direção
Para evitar batidas mecânicas no fim de curso, foi implantado um tope limite via software. O “tope de software”, ou seja, o amortecimento de fim de curso, é ativado a aproximadamente 5º do ângulo de direção antes do tope mecânico. Para essa finalidade, é reduzida a servo assistência, em função do ângulo de direção e da velocidade dos movimentos do volante, inclusive se for realizado uma força contrária. Para a autoadaptação dos topes limites de direção, é importante recorrer a informação detalhada que se encontra no Manual de Reparações do Sistema ELSA, ou no modo operativo “Localização de Falhas Assistidas” do VAS505X.
33
DIREÇÃO ASSISTIDA ELETROMECÂNICA APA
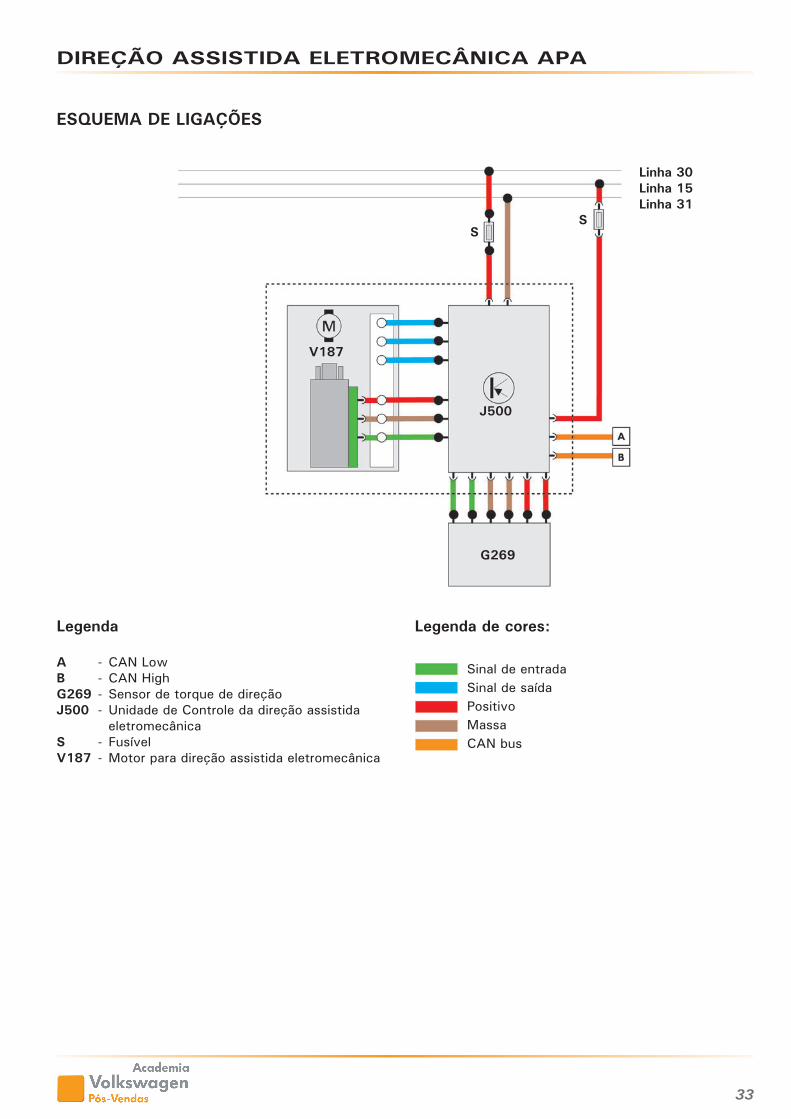
Linha 30Linha 15Linha 31
ESQUEMA DE LIGAÇÕES
Legenda
A - CAN LowB - CAN HighG269 - Sensor de torque de direção J500 - Unidade de Controle da direção assistida eletromecânica S - Fusível V187 - Motor para direção assistida eletromecânica
Sinal de entradaSinal de saídaPositivoMassaCAN bus
Legenda de cores:
V187
J500
G269
SS
34
ANOTAÇÕES

A reprodução ou transcrição total ou parcial deste material é proibida,
salvo expressa autorização, por escrito, da Volkswagen do Brasil.
As informações contidas nesta apostila são exclusivamente para treinamento
dos profissionais da Rede de Concessionárias Volkswagen,
estando sujeitas a alterações sem prévio aviso.
Academia VolkswagenVia Anchieta, km 23,5
São Bernardo do Campo - SPCEP 09823-901 - CPI 1177 M
arç
o/2
009