dinamica_frenagem
TRANSCRIPT

FRENAGEM
Antonio Carlos Canale Página 1 17/5/2004
Desempenho na frenagem.
1. Introdução: Engenharia da Mobilidade ↔ Engenharia de freios
Figura 1 – A Engenharia da frenagem
ENGENHARIA DA
FRENAGEM
Aspectos legais
Normas Leis Requisitos
Aspectos econômicos
Custos de fabricação Custos de manutenção Etc.
Aspectos ambientais
Impacto no meio ambiente na: utilização, manutenção, fabricação, etc.
Aspectos Sociais
Acidentes: Morbidade, mutilação, custos hospitalares . Custos de Seguros. Ruído. Poluição Etc.
Aspectos Técnicos
Campo de trabalho que envolve alta responsabilidade
profissional
Especialista: Atuar em áreas ou
aspectos específicos com profundidade
Generalista: Técnico, social, legal,
ambiental, político, etc.

FRENAGEM
Antonio Carlos Canale Página 2 17/5/2004
OBJETIVO: “Controlar a velocidade”(1) ou “frear o veículo na menor distância”(2) “de forma segura mantendo-se a dirigibilidade e a estabilidade”(3) em “qualquer condição operacional admissível”(4) para o veículo em questão.
Definições de “estabilidade”(3) e “dirigibilidade ou manobrabilidade”(4): Os termos “manobrabilidade” e “estabilidade“ são encontrados com
muita freqüência na literatura de dinâmica dos veículos com rodas. A
estabilidade de um automóvel se refere a sua resistência ao escorregamento
lateral (estabilidade direcional) e tombamento (estabilidade com relação ao
ângulo de rolamento). Estabilidade contra o “jackknife” é um fator adicional
considerado em veículos de transporte de cargas articulados. O conceito de
manobrabilidade é bem menos definido que o anterior, para veículos com rodas
(Lobas 1987). Como uma forma de generalizar tais conceitos, este trabalho
tomará as definições utilizadas na Engenharia Aeronáutica, transcritas a seguir:
Estabilidade – é definida como a tendência decrescente das amplitudes do
movimento perturbado de um veículo/avião, após algum tempo do término da
perturbação (Roskan 1972).
Manobrabilidade – é definida como a capacidade e habilidade do
veículo/piloto em sair de uma condição de movimento em regime permanente a
uma outra desejada (Roskan 1972).
Pode-se definir também nestes termos o conceito de “resposta
dinâmica”:
Resposta dinâmica – é definida como as mudanças das variáveis de
movimento relativas a uma condição inicial de movimento em regime
permanente, como resultado de uma perturbação gerada externamente (forças
e torques desestabilizantes aerodinâmicos, variação do coeficiente de adesão
disponível nas rodas, etc.) e internamente (acionamento do sistema de
esterçamento, freio, etc.). (Roskan 1972).

FRENAGEM
Antonio Carlos Canale Página 3 17/5/2004
2. “AUTOVEÍCULOS ↔ VEÍCULO DE TRANSPORTE DE CARGAS”:
a) A condição operacional (carregamento)(4) afeta
significativamente o desempenho do sistema de freios
de um autoveículo??????
Para responder a esta importante pergunta teremos que inicialmente
determinar o centro de massa ou de gravidade de um autoveículo.
i) Determinação do centro de gravidade de um
autoveículo com o peso em ordem de marcha
(vazio). Para posicionar do C.G.1 do veículo
usaremos o sistema de coordenadas retangular
normalizado pela SAE, conforme Figura (2)
Figura 2 – Sistema de coordenadas SAE j670e (Vehicle dynamics terminology )[Gillespie 1992]
1 C.G. – centro de gravidade
FRENAGEM
Antonio Carlos Canale Página 4 17/5/2004
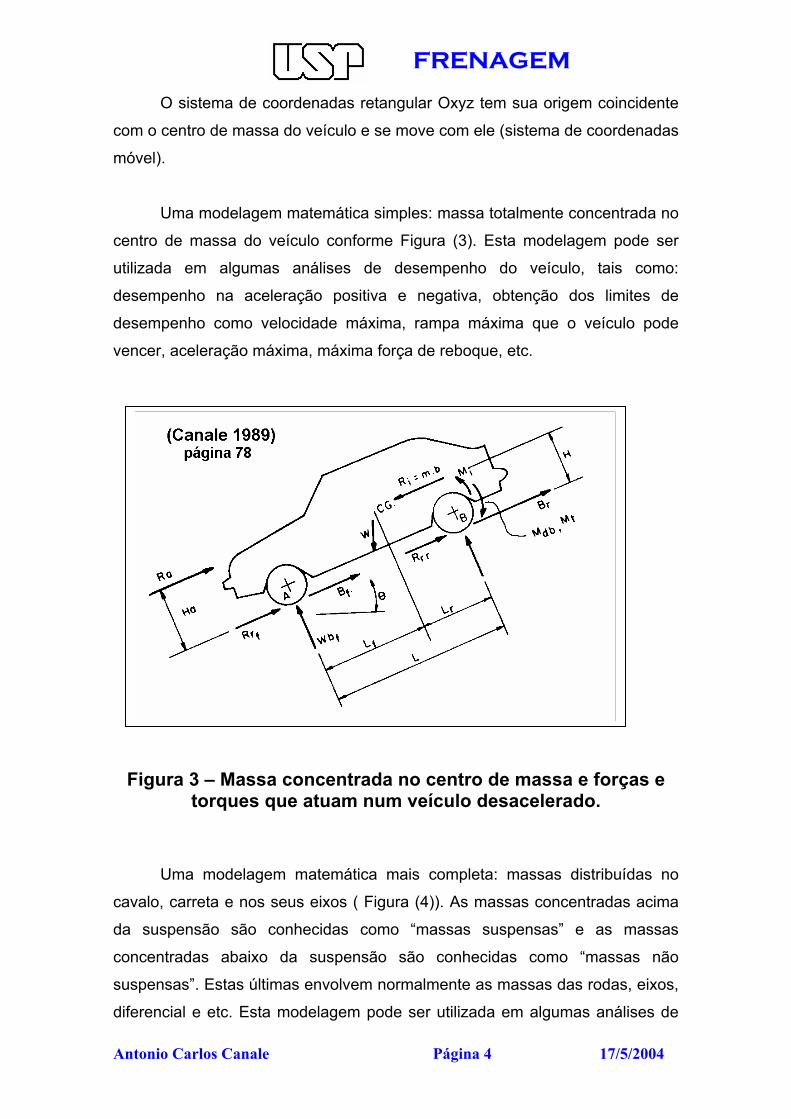
O sistema de coordenadas retangular Oxyz tem sua origem coincidente
com o centro de massa do veículo e se move com ele (sistema de coordenadas
móvel).
Uma modelagem matemática simples: massa totalmente concentrada no
centro de massa do veículo conforme Figura (3). Esta modelagem pode ser
utilizada em algumas análises de desempenho do veículo, tais como:
desempenho na aceleração positiva e negativa, obtenção dos limites de
desempenho como velocidade máxima, rampa máxima que o veículo pode
vencer, aceleração máxima, máxima força de reboque, etc.
Figura 3 – Massa concentrada no centro de massa e forças e torques que atuam num veículo desacelerado.
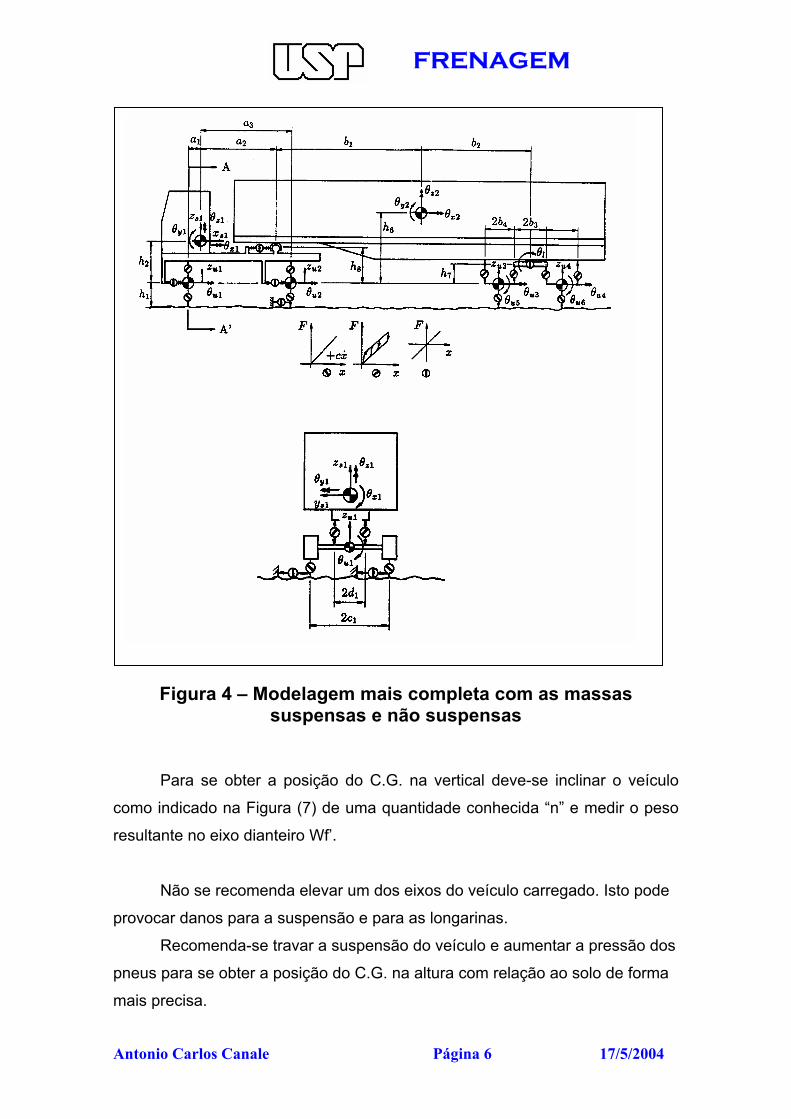
Uma modelagem matemática mais completa: massas distribuídas no
cavalo, carreta e nos seus eixos ( Figura (4)). As massas concentradas acima
da suspensão são conhecidas como “massas suspensas” e as massas
concentradas abaixo da suspensão são conhecidas como “massas não
suspensas”. Estas últimas envolvem normalmente as massas das rodas, eixos,
diferencial e etc. Esta modelagem pode ser utilizada em algumas análises de

FRENAGEM
Antonio Carlos Canale Página 5 17/5/2004
desempenho do veículo que pode levar em consideração algumas das
influências da suspensão no desempenho do veículo.
O centro de gravidade de um veículo ou do seu protótipo pode ser obtido
na condição de peso em ordem de marcha pesando-se o veículo na horizontal
e inclinado como mostram as Figuras (5), (6) e (7), respectivamente nas
direções longitudinal, transversal e vertical.
Quanto mais se levantar o eixo do veículo para a obtenção do C.G. na
vertical (Figura (7)) , mais precisa se obterá sua posição. A transferência de
carga para o outro eixo não levantado deve ser muito maior que a precisão da
balança para que se obtenha precisão na obtenção do C.G. na vertical.
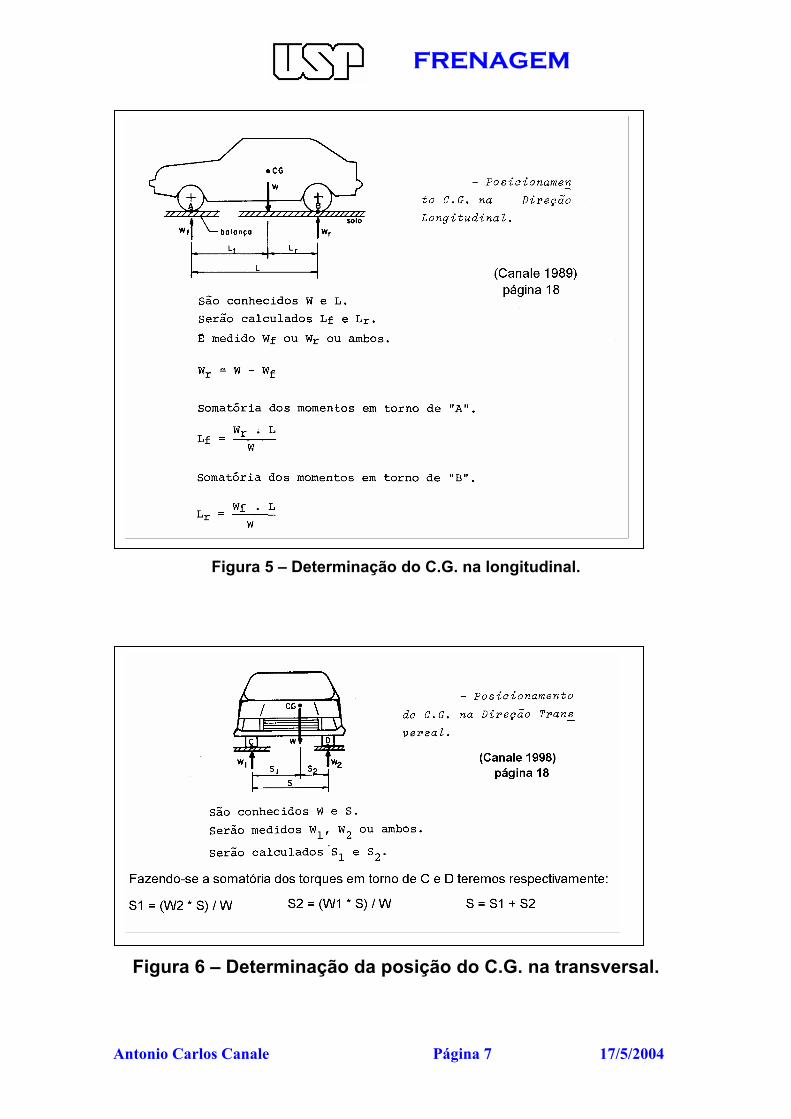
Para se obter a posição do C.G. na longitudinal, deve-se pesar o eixo
dianteiro e traseiro como indicado na Figura (5). Fazendo-se a somatória dos
torques em torno de A e B pode-se obter Lf e Lr.
Para se obter a posição do C.G. na transversal, deve-se pesar as rodas
do lado esquerdo e direito como indicado na Figura (6). Fazendo-se a
somatória dos torques em torno de C e D pode-se obter S1 e S2.
FRENAGEM
Antonio Carlos Canale Página 6 17/5/2004
Figura 4 – Modelagem mais completa com as massas suspensas e não suspensas
Para se obter a posição do C.G. na vertical deve-se inclinar o veículo
como indicado na Figura (7) de uma quantidade conhecida “n” e medir o peso
resultante no eixo dianteiro Wf’.
Não se recomenda elevar um dos eixos do veículo carregado. Isto pode
provocar danos para a suspensão e para as longarinas.
Recomenda-se travar a suspensão do veículo e aumentar a pressão dos
pneus para se obter a posição do C.G. na altura com relação ao solo de forma
mais precisa.
FRENAGEM
Antonio Carlos Canale Página 7 17/5/2004
Figura 5 – Determinação do C.G. na longitudinal.
Figura 6 – Determinação da posição do C.G. na transversal.

FRENAGEM
Antonio Carlos Canale Página 8 17/5/2004
Figura 7 – Posicionamento do C.G. na altura

FRENAGEM
Antonio Carlos Canale Página 9 17/5/2004
Para uma análise mais abrangente do desempenho do veículo deve-se
saber a posição do centro de gravidade do veículo carregado. Conhecendo-se
as cargas que o veículo transporta e suas posições relativas, pode-se obter a
posição do C.G. na longitudinal, na transversal e na altura como indicadas na
Figuras (8).
Figura 8 – Posição do C.G. do veículo carregado.

FRENAGEM
Antonio Carlos Canale Página 10 17/5/2004
H*, L* e S* é a posição do C.G. do veículo carregado.
As normas mais modernas do mundo, como a ECE –13 sobre freios,
estabelece requisitos mínimos de desempenho do veículo sob qualquer
carregamento permissível. Entende-se carregamento permissível aquele em
que o usuário carrega o veículo dentro dos limites impostos pelo fabricante e
pela legislação local vigente. Isto garante ao usuário uma utilização segura do
veículo, dentro dos limites impostos pela Norma, mas traz uma grande
dificuldade ao projetista de freios. O sistema de freios deve ser projetado e
calibrado para atender a estes requisitos em muitas condições operacionais
diferentes. Algumas vezes é necessário se utilizar de componentes adicionais
ou até sistemas mais sofisticados como o ABS. Uma forma de se tentar definir
com maior precisão estas condições operacionais permissíveis é se utilizar do
conceito vulgarmente chamado entre os pilotos de aeronaves de passeio do
centro de gravidade. Através dele poderemos ter um desempenho mapeado da
frenagem do veículo e verificar se o mesmo satisfaz os requisitos legais.
ii) A variação da posição do C.G. do veículo carregado ( passeio do centro de gravidade).
Os gráficos da Figura (9) mostram respectivamente o passeio do centro
de gravidade na longitudinal e na altura (vertical ) para o Kadett. O interior das
figuras contém as posições do C.G. do veículo carregado que satisfazem os
requisitos exigidos pelo fabricante [Canale 1991]. A variação da posição do
C.G. na longitudinal e na altura são importantes para o estudo do desempenho
do veículo freando. Uma observação importante deve ser feita neste momento;
dados relativos ao desempenho do Kadett serão mostrados neste texto a
seguir, mas devem apenas ser tomados de forma qualitativa e não quantitativa.
O Kadett será apenas utilizado como um veículo exemplo. Pode ser que
valores utilizados nas modelagens matemáticas posteriores não correspondam
ao do veículo real. Os dados de desempenho que serão mostrados a seguir
não devem ser extrapolados para o veículo real.
Para se ter uma idéia abrangente do desempenho na frenagem do
Kadett exemplo teremos que obtê-lo em todas as posições do C.G. dentro da

FRENAGEM
Antonio Carlos Canale Página 11 17/5/2004
Figura (9). Desta forma também será mostrado o desempenho de veículos
combinados mapeado (vários pontos dentro do passeio do C.G.).
A Figura (10) mostra o desempenho na frenagem do Kadett como
função do passeio do C.G.. Notamos uma grande diferença de desempenho
dependendo da carga transportada e de como ela é colocada no veículo.
Notaremos ainda durante este curso que a variação no desempenho da
frenagem de veículos de transporte de carga pesados são ainda maiores. Uma
boa otimização do sistema de freios de um veículo pode diminuir estas
diferenças.
No decorrer do curso veremos como o gráfico da Figura (10) foi obtido.
Queremos enfatizar e responder a questão a) formulada neste texto.
A Figura (11) mostra o espaço percorrido pelo Kadett desacelerando de
uma velocidade inicial de 96 km/h a zero função passeio do centro de
gravidade.

FRENAGEM
Antonio Carlos Canale Página 12 17/5/2004
Figura 9 – Passeio do C.G. na longitudinal e na altura com relação ao solo.[Canale, 1991]
iii) Mapas de desempenho na frenagem do Kadett

FRENAGEM
Antonio Carlos Canale Página 13 17/5/2004
Figura 10 – Desac. do veíc. função passeio do C.G.[Canale,1991]
Figura 11 – Espaço necessário para parar o Kadett de forma segura de 96
km/h a zero numa pista com coef. de aderência de 0,9[Canale, 1991]

FRENAGEM
Antonio Carlos Canale Página 14 17/5/2004
3. Dinâmica do pneu x pavimento. a) Qual a importância dos pneumáticos na frenagem do
veículo ???? i) Forças e torques gerados pelo pneu em contato com
o pavimento. ii) Definição de coeficiente de aderência longitudinal,
lateral e conjugado. Estes itens serão definidos no texto a seguir:
Antes de definir os coeficientes e as forças e torques gerados por um
pneu, é conveniente se definir os movimentos que o pneu pode ter com relação
ao solo.
Movimentos: Escorregamento x rolamento:
Figura 12 – Roda rígida x pavimento rígido.[Canale, 1989] A roda rígida e o solo rígido são entes puramente matemáticos. Sempre
existirão deformações do pneu e do pavimento. A deformação do pneu sobre o
pavimento é considerável, formando uma área de contato. Podemos então

FRENAGEM
Antonio Carlos Canale Página 15 17/5/2004
dizer que o modelo de roda rígida não se emprega ao pneu. Um modelo de
roda elástica deve então ser utilizado. A roda elástica (pneu) rolando sobre o
pavimento apresenta um movimento de rolamento puro da roda rígida
conjugado com um movimento de escorregamento parcial.
A distribuição da pressão no pneu na área de contato com o solo pode
ser vista na Figura (13) durante a tração e a frenagem.
Figura 13 – Pneu em contato com o pavimento.[Canale, 1989]
Quando as fibras comprimidas se expandem, elas escorregam sobre a
superfície do solo, originando um “escorregamento parcial”.
Podemos concluir que todo torque (força) transmitido ao solo por uma
roda elástica, resulta num escorregamento parcial da mesma e vice-versa.
Verifica-se experimentalmente que a máxima transferência de força para o
solo, através de um pneu, se faz quando a percentagem do escorregamento
com relação ao rolamento é da ordem de 10% a 20% (Canale,1989 pág. 35)
Para enfatizar as características particulares de uma roda elástica, o
coeficiente de atrito passa a se chamar “coeficiente de adesão µ”. O seu valor

FRENAGEM
Antonio Carlos Canale Página 16 17/5/2004
máximo será chamado “µ0”. Um exemplo do mecanismo das forças
longitudinais num pneu é mostrado na Figura (14).
Figura 14 – Definição do coeficiente de adesão.[Canale, 1989] O valor máximo do coeficiente de adesão µ0 depende de muitos fatores,
mas em especial da borracha da banda de rodagem, do pavimento e da
presença de corpos estranhos entre eles, como sujeira, água, etc. A tabela a
seguir mostra apenas valores em sua ordem de grandeza mais freqüente.
Figura 15 – Valores de referência para do coeficiente de adesão máximo e coeficiente de atrito no escorregamento. [Canale, 1989]

FRENAGEM
Antonio Carlos Canale Página 17 17/5/2004
A presença de película de água no asfalto pode reduzir em muito o
coeficiente de aderência. Acima de 1 cm o pneu pode aquaplanar e perder o
contato com o pavimento. Nestas circunstância a perda da dirigibilidade e
estabilidade do veículo é certa.
iii) Forças laterais num veículo na curva. O pneu deve ter também a capacidade de gerar altas forças laterais para
proporcionar dirigibilidade e estabilidade ao veículo e permitir a realização de
curvas em altas velocidades.
A Figura (16) mostra como o pneu gera forças laterais.
Figura 16 – Pneu gerando força lateral. [Canale, 1989] Da Figura (16) se conclui que: toda vez que existir um ângulo de
escorregamento lateral no pneu, existirá uma força lateral e vice-versa.
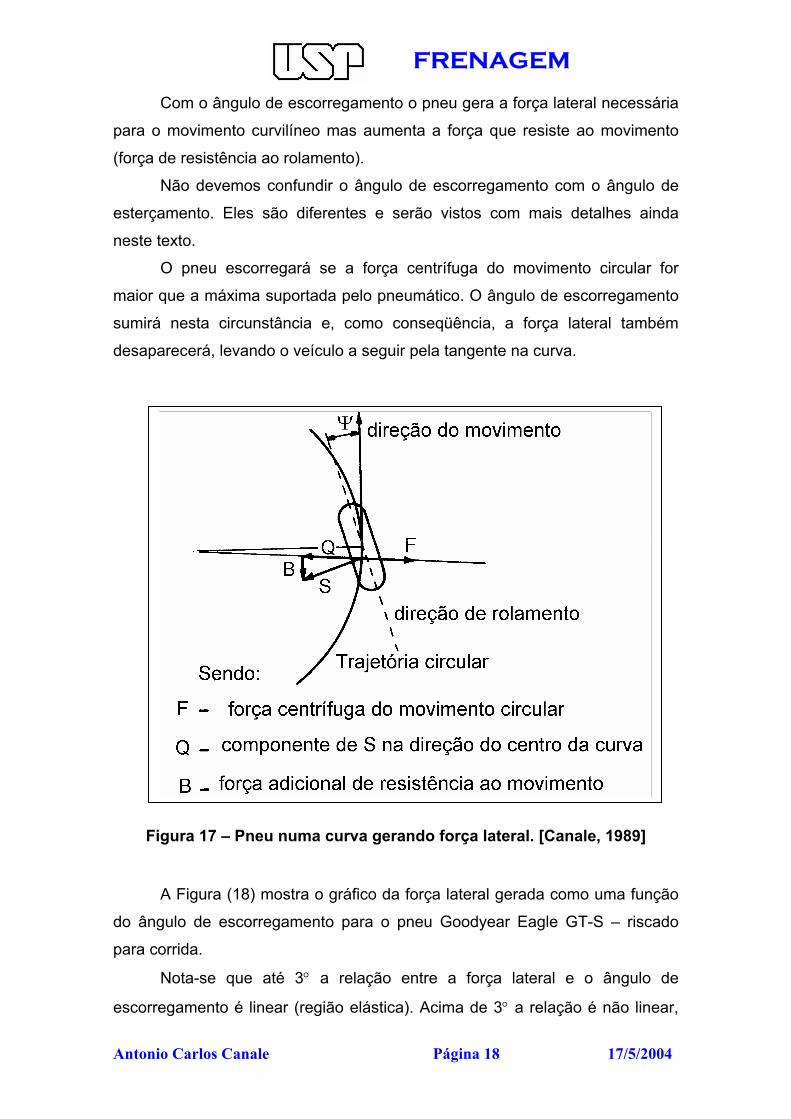
A Figura (17) mostra o pneu em um veículo durante uma curva.
FRENAGEM
Antonio Carlos Canale Página 18 17/5/2004
Com o ângulo de escorregamento o pneu gera a força lateral necessária
para o movimento curvilíneo mas aumenta a força que resiste ao movimento
(força de resistência ao rolamento).
Não devemos confundir o ângulo de escorregamento com o ângulo de
esterçamento. Eles são diferentes e serão vistos com mais detalhes ainda
neste texto.
O pneu escorregará se a força centrífuga do movimento circular for
maior que a máxima suportada pelo pneumático. O ângulo de escorregamento
sumirá nesta circunstância e, como conseqüência, a força lateral também
desaparecerá, levando o veículo a seguir pela tangente na curva.
Figura 17 – Pneu numa curva gerando força lateral. [Canale, 1989]
A Figura (18) mostra o gráfico da força lateral gerada como uma função
do ângulo de escorregamento para o pneu Goodyear Eagle GT-S – riscado
para corrida.
Nota-se que até 3° a relação entre a força lateral e o ângulo de
escorregamento é linear (região elástica). Acima de 3° a relação é não linear,

FRENAGEM
Antonio Carlos Canale Página 19 17/5/2004
adquirindo um valor máximo para a força com aproximadamente 6,5°.de ângulo
de escorregamento.
Até 6,5° o pneu trabalha numa região estável, gerando forças laterais.
Acima de 6,5° o pneu perde sua capacidade de gerar força lateral, sendo uma
região instável com o pneu indo rapidamente para o escorregamento total e a
perda repentina da força lateral.
O gradiente entre a força e o ângulo de escorregamento é conhecido
como “cornering stiffness”.
Figura 18 – Força lateral x ângulo de escorregamento (cornering stiffness) [Milliken, 1995].

FRENAGEM
Antonio Carlos Canale Página 20 17/5/2004
Figura 19 – Força lateral para várias forças normais [Milliken,1995] O cornering stiffness é importante no desempenho, estabilidade e
dirigibilidade do veículo em movimento.
A intensidade da força lateral desenvolvida pelo pneu depende da força
que o comprime ao pavimento, chamada neste texto de força normal ou vertical
quando o veículo está num plano horizontal. O gráfico da Figura (19) mostra a
força lateral gerada como uma função do ângulo de escorregamento para três
diferentes forças normais (900 lb., 1350 lb e 1800 lb). Pode-se notar no gráfico
da Figura (19) que ao se dobrar a força vertical, não se dobra a força lateral. O
pneu perde eficiência com o aumento da força normal. Esta perda é muito
grande quando se carrega o pneu com cargas normais acima do máximo
indicado pelo fabricante. Veículo carregados acima do seu peso total máximo
terão problemas de estabilidade e dirigibilidade em curvas.

FRENAGEM
Antonio Carlos Canale Página 21 17/5/2004
Figura 20 – Coeficiente de adesão lateral [MILLIKEN, 1995]. O gráfico da Figura (20) mostra a força lateral normalizada (coeficiente
de adesão lateral) como uma função do ângulo de escorregamento para três
forças normais diferentes. Enfatizando o que foi dito com relação ao gráfico da
Figura (19), a Figura (20) mostra uma queda no coeficiente de aderência lateral
máximo com o aumento da força normal.
A Figura (21), generalizando a Figura (17), mostra os pneus gerando
forças laterais para manter o cavalo semi-reboque num movimento curvilíneo.
Existem ângulos de escorregamento em todos o pneus do semi-reboque
gerando forças laterais que devem se contrapor a força centrífuga do
movimento circular, concentrada no C.G. do cavalo e no C.G. do semi-reboque.
Os ângulos de escorregamento aumentam com o aumento da velocidade do

FRENAGEM
Antonio Carlos Canale Página 22 17/5/2004
veículo na curva. Isto gera mais força lateral para contrabalancear o aumento
da força centrífuga do movimento circular. Com o aumento contínuo da
velocidade o cornering stiffness (cornering power) deixa a região linear,
diminuindo de valor até zero. Neste momento o veículo perde a estabilidade
com o giro da composição na pista.
Figura 21 – Cavalo mecânico semi-reboque na curva. Solicitação lateral nos pneus.
Os gráficos das Figuras (14) e (20) mostram respectivamente o
coeficiente de adesão longitudinal e o lateral típicos para um pneu. A curva de
adesão longitudinal (Figura 14) é obtida quando o pneu não sofre força lateral.
A curva de adesão lateral (Figura 20) é obtida quando o pneu não sofre força
longitudinal. Com o veículo em movimento, os pneus geram forças laterais e
longitudinais ao mesmo tempo. A Figura (21) mostra como o pneu se comporta
com um carregamento geral.(forças longitudinais conjugadas com forças
laterais). A elipse é uma aproximação para o limite de desempenho de um
pneu típico.
ΨfΨr
Ψt
velocidade
Força centrífuga
Cornering Power de cada eixo
0
50000
100000
150000
200000
250000
300000
0 20 40 60 80 100
Velocidade mph
Co
rner
ing
Pow
er
NR (lbf)
NS (lbf)
NF (lbf)
Raio de giro 400 ft
CAVALO SEMI-REBOQUE EMCURVA

FRENAGEM
Antonio Carlos Canale Página 23 17/5/2004
Figura 22 – Elipse de aderência típica de um pneu Qualquer força dinâmica gerada pela inércia do veículo que exceda os
limites da elipse não será contraposta pelo pneu. O veículo perderá a
estabilidade e a dirigibilidade.
Os pilotos de competição devem se manter nos limites da elipse (limites
de aderência) em reta ou em curva para conseguir o máximo de desempenho
do veículo. A elipse da Figura (22) é típica de um pneu em contato com
pavimento de asfalto/concreto seco e em boas condições de uso. A presença
de óleo, água, ou qualquer impureza, fecha a elipse diminuindo o desempenho
do veículo. Pneus em más condições reduzem drasticamente a elipse,
principalmente em pista molhada com lâmina de água. Nestas condições a
margem de segurança de utilização do veículo diminui, aumentado-se a
possibilidade de ocorrência de acidentes.
Um número expressivo de cientistas e pesquisadores trabalham na
modelagem matemática dos pneus. Simulações em computador para se obter
a resposta de um veículo em movimento depende basicamente da qualidade
do modelo matemático do pneu adotado.
O pneu instalado num veículo pode ter ângulos com relação a pavimento
mostrados na Figura (22).
Fy/Fz
Fx/Fz
Ângulo deEscorrega-mento ψ
5º
1,1
0,55
0,80,4
Fy/Fz
Freagem µf
Tração µt
µl
µlForça de frenagemmáxima
Forçalateralmáxima

FRENAGEM
Antonio Carlos Canale Página 24 17/5/2004
Figura 23 – Ângulos que a roda faz com o pavimento`[Canale 1989].
O ângulo de camber é um ângulo de escorregamento. Ele gera forças
laterais que pré-tensionam a suspensão contribuindo para reduzir o efeito das
folgas no sistema de esterçamento. Folgas podem provocar um movimento
oscilatório do sistema de direção conhecido como shimmy. O ângulo de
camber pode alterar a elipse do pneu em contato com o pavimento. Valores
adequados para o camber podem melhorar a eficiência dos pneus de um
mesmo eixo com o veículo na curva. Alguns efeitos na estabilidade e na
dirigibilidade podem ser sentidos. Estes ângulos são normalmente
especificados através de ensaios realizados em pista de teste.
O ângulo de convergência ou divergência também provoca pré-tensão
nos elementos da suspensão.
O ângulo de caster é utilizado para gerar o torque auto-alinhante no
sistema de direção.
A inclinação do pino interfere no esforço para esterçar as rodas do
veículo parado e no torque auto-alinhante com o veículo em movimento.

FRENAGEM
Antonio Carlos Canale Página 25 17/5/2004
4. Geração das forças de frenagem num autoveículo.
a) Freio a disco e a tambor.
Figura 24 – Desenho de um freio à disco. [Limpert, 1992] A Figura 24 mostra o desenho em perspectiva de um freio a disco. As
pastilhas em ambos os lados do disco são acionadas de encontro a este
através do cilindro e este pela pressão do circuito hidráulico, a qual é
controlada pelo motorista. O circuito hidráulico é normalmente substituído por
um circuito pneumático em veículos pesados como mostrado na Figura 25.. O
disco de freio pode ser duplo com sistema de refrigeração por convecção
forçada. O disco fica em contato direto com o ar, que é o meio refrigerante,
diferentemente o freio a tambor. O freio a disco tem assim melhor desempenho
térmico que o a tambor.

FRENAGEM
Antonio Carlos Canale Página 26 17/5/2004
Figura 25 – Foto de um freio à disco de caminhão. [Limpert,1992]
Figura 26 - Alguns tipos de freios à tambor. [Limpert, 1992]

FRENAGEM
Antonio Carlos Canale Página 27 17/5/2004
Figura 27 –Foto de um freio tipo cames [Limpert,1992] A força de frenagem é geralmente obtida por atrito entre duas
superfícies. Na Figura (27), a pressão do circuito pneumático é liberada pela
válvula pedal para o cilindro que a transforma num torque que gira o came S. O
came desloca as lonas contra o tambor, gerando, por atrito, um torque de
frenagem que dividido pelo raio dinâmico da roda resulta na força de frenagem
B. A Figura (28) mostra a força de frenagem B nos eixos de um veículo.(Bf e
Br) As outras forças que atuam no veículo no movimento desacelerado são
também mostradas.
A força de resistência do ar (Ra), a inércia dos elementos rotativos do
sistema de transmissão (Mi) e o freio motor (Mdb) podem ser desprezados
numa frenagem de emergência. Estes mesmos fatores não podem ser
desprezados quando o veículo frea por longo tempo em baixa desaceleração
ou quando desce uma serra com a velocidade controlada.

FRENAGEM
Antonio Carlos Canale Página 28 17/5/2004
Figura 28 – Forças e torques que atuam no veículo desacelerando. [Canale, 1989]
A pressão é transformada em força no cilindro do freio. A divisão entre a
força gerada no tambor pela força que sai do cilindro é um fator conhecido
como fator de freio. A Figura (29) mostra o desenvolvimento matemático para o
fator de freio C* e também o desenvolvimento matemático que é normalmente
utilizado para se distribuir as forças de frenagem nos eixos do veículo em peso
total máximo ou em peso operacional. Nos programas computacionais que
serão utilizados para o cálculo do desempenho dos veículos exemplos, as
forças de frenagem nos eixos do veículo serão obtidas como uma função da
pressão do circuito pneumático, liberado pela válvula pedal, multiplicado pela
área do cilindro, pelo C*, pelo rendimento do sistema, pelo raio do tambor e
dividido pelo raio dinâmico da roda. O raio dinâmica da roda é a distância do
centro da roda com relação ao solo com o pneu sob carga vertical. Este valor
varia com a velocidade do veículo pelo efeito centrífugo. Esta variação
normalmente não se mostra significante no cálculo do desempenho na
aceleração e desaceleração do veículo.

FRENAGEM
Antonio Carlos Canale Página 29 17/5/2004
b) Fator de freio
i. Modelagem matemática.
Figura 29 – Fator de freio C*, relação Br/W e FED/ET
FRENAGEM
Antonio Carlos Canale Página 30 17/5/2004
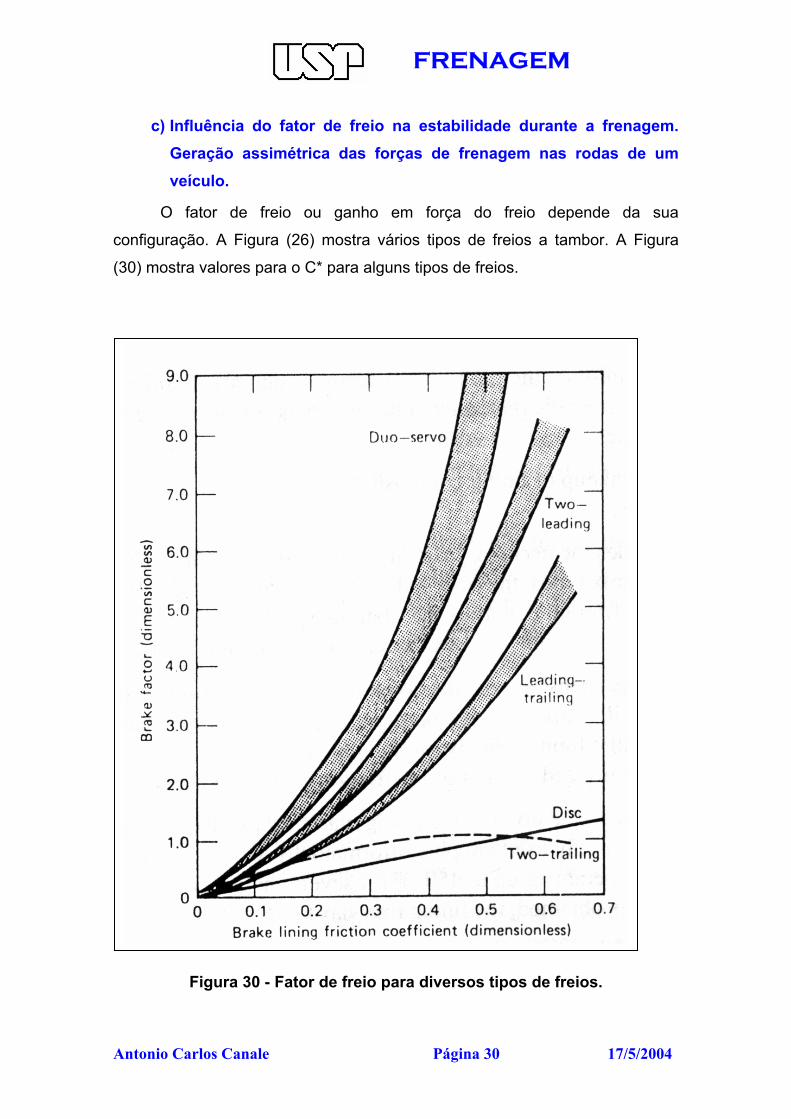
c) Influência do fator de freio na estabilidade durante a frenagem. Geração assimétrica das forças de frenagem nas rodas de um veículo.
O fator de freio ou ganho em força do freio depende da sua
configuração. A Figura (26) mostra vários tipos de freios a tambor. A Figura
(30) mostra valores para o C* para alguns tipos de freios.
Figura 30 - Fator de freio para diversos tipos de freios.

FRENAGEM
Antonio Carlos Canale Página 31 17/5/2004
Um alto fator de freio gera alta força de frenagem com baixa pressão do
circuito pneumático ou hidráulico. Este é um dos fatores pelos quais o freio a
tambor com alto C* é utilizado em veículos de transporte de carga pesados.
Por outro lado, forças assimétricas elevadas podem aparecer quando
um dos freios de um eixo sofre uma contaminação por resíduos ou água. Com
esta contaminação poderemos ter C*s muito diferentes nas rodas de um
mesmo eixo, gerando torques desestabilizantes e tendência para o veículo
girar para um dos lados durante a frenagem. O freio à disco, que tem um
menor fator de freio, tem este problema amenizado. O freio à disco geralmente
proporciona uma estabilidade direcional melhor que os à tambor quando o
veículo é freado.
d) Balanceamento das forças de frenagem nos eixos do veículo. Balanceamento ideal x balanceamento real.
i. Balanceamento num veículo com dois eixos. Balanceamento em veículos combinados
Com as equações de Br/W e FED/ET podemos elaborar gráficos que nos
mostrem o balanceamento das forças de frenagem ideal e real (Figura 31).
Figura 31 – Distribuição das forças de frenagem real e ideal.

FRENAGEM
Antonio Carlos Canale Página 32 17/5/2004
A relação entre Br e Bf é uma reta na maioria dos veículos de transporte
de carga no Brasil. Alguns veículos possuem válvulas que variam esta relação
de forma contínua ou discreta. Estas válvulas tem por finalidade aproximar a
distribuição real das forças de frenagem com a ideal. A relação ideal entre Bf e
Br, que é igual a relação entre os pesos dinâmicos, é normalmente uma
parábola. A Figura (31) mostra a forma clássica de se otimizar a distribuição
das forças de frenagem num autoveículo. Esta forma de análise é muito boa
com o veículo em condições operacionais bem definidas. Ela não mostra o
balanceamento para o veículo em todas as suas condições operacionais
possíveis e admissíveis. Este texto mostrará, a seguir, um procedimento novo
de análise, onde o freio deve ser otimizado levando-se em consideração todas
as possíveis e admissíveis condições operacionais do veículo. Serão
desenvolvidos mapas que mostram o desempenho na frenagem de uma forma
abrangente.
A Figura (32) mostra a distribuição das forças normais como uma função
da desaceleração. A distribuição das forças normais é a mesma distribuição
das forças de frenagem ideal no veículo combinado. Comparando-se as
Figuras (32) e (33), podemos concluir que há uma grande variação da
distribuição ideal das forças de frenagem com a desaceleração e com o veículo
vazio e carregado. Este é um fato que complica a ação do projetista de freios
para otimizar a composição em vários carregamentos.
e) Eficiência do sistema de freios
i. Relação eficiência x segurança veicular.
A eficiência é um fator extremamente importante para o projetista do
sistema de freios e será definida a seguir com a ajuda da Figura (34).
A eficiência é definida como a divisão entre a desaceleração máxima
que o veículo pode desenvolver sem perda de estabilidade e dirigibilidade pela
desaceleração máxima que seria obtida com todas as rodas freando com
aderência máxima µ0. Um sistema de freios com 50% de eficiência aproveitaria
apenas metade da capacidade máxima de se frear o veículo sobre o
pavimento.

FRENAGEM
Antonio Carlos Canale Página 33 17/5/2004
A eficiência do sistema de freios de um veículo será de 100% quando a
distribuição das forças de frenagem nos seus eixos for a ideal. O projetista do
sistema de freios deve otimizá-lo para se obter a máxima eficiência possível
com o veículo em todas as suas condições operacionais admissíveis.
Figura 32 – Distribuição das forças normais e distribuição ideal das forças de frenagem para o veículo vazio
Figura 33 - Distribuição das forças normais e distribuição ideal das forças de frenagem para o veículo em peso total máximo.

FRENAGEM
Antonio Carlos Canale Página 34 17/5/2004
Figura 34- Definição de eficiência do sistema de freios de um veículo.
Esta otimização não é uma tarefa fácil e normalmente se precisa de
programas computacionais de cálculo e simulação que proporcionem mapas de
desempenho como faremos ainda neste texto.
Existe uma dramática relação entre a eficiência de um sistema de freios
e a probabilidade da ocorrência de acidentes. Este relação é exponencial e é
mostrada na Figura (35).
A Figura (35) mostra uma relação exponencial entre a eficiência e a
probabilidade de ocorrência de frenagens que apresentem escorregamento de
rodas do veículo.
f) Movimentos instáveis na frenagem. Jackknife para veículos combinados cavalo semi-reboque
Quando as rodas do eixo dianteiro escorregam, o motorista perde o
controle direcional e não pode desviar do obstáculo que originou a frenagem.
Quando as rodas do eixo traseiro escorregam o veículo pode girar
perigosamente na pista.
Em veículos combinados como o cavalo semi-reboque, o
escorregamento das rodas dos eixos da carreta geram um movimento instável
e perigoso. O semi-reboque gira em torno do cavalo. Este movimento é

FRENAGEM
Antonio Carlos Canale Página 35 17/5/2004
relativamente lento no tempo e poderá ser corrigido por um motorista
experiente.
Figura 35 – Relação eficiência com número de escorregamentos e segurança veicular.
O escorregamento das rodas do eixo traseiro do cavalo mecânico gera
um movimento instável conhecido como jackknife. Este movimento é rápido e
muito perigoso. O cavalo gira levando consigo o semi-reboque. A seqüência
recomendada de escorregamento das rodas de um cavalo semi-reboque seria
então: rodas do eixo dianteiro, rodas do semi-reboque e por último, rodas do
eixo traseiro do cavalo mecânico.
Dispositivos como o ABS previnem o escorregamento das rodas,
mantendo a dirigibilidade e estabilidade do veículo. O ABS foi desenvolvido na

FRENAGEM
Antonio Carlos Canale Página 36 17/5/2004
indústria Aeronáutica para manter a estabilidade e dirigibilidade dos aviões
pousando em pista molhada em alta velocidade.
5. Dinâmica da frenagem
a) Perfil típico desaceleração x tempo de um autoveículo numa frenagem de emergência.
A Figura (36) mostra o perfil típico pelo tempo de um autoveículo freando
em emergência.
Figura 36 – Perfil desaceleração por tempo.
i. Tempo de resposta do motorista (ergonomia, visibilidade, condições do motorista, código nacional de trânsito, outros)
O tempo de resposta do motorista pode variar muito dependendo de
fatores tais como: ergonomia, visibilidade, condições físicas e psicológicas.

FRENAGEM
Antonio Carlos Canale Página 37 17/5/2004
O adequado projeto ergonômico da cabina do motorista e dos sistemas
que ele operará contribui para reduzir o tempo de resposta numa situação de
emergência. O conforto contribui para diminuir a fadiga do motorista em
viagens longas, contribuindo decisivamente para que este reaja rapidamente
numa situação de emergência. Estima-se este tempo de resposta variando
entre 0,5 segundo até 2 segundos. A presença de álcool no organismo, mesmo
em pequenas doses, aumenta dramaticamente o tempo de resposta.
ii. Tempo de resposta do sistema de freios (dispositivos utilizados para diminuir o tempo de resposta do sistema de freios)
O tempo de resposta do sistema pode ser considerado como a soma de
ta + tb. Após o acionamento do pedal de freio, um tempo para o sistema iniciar
a frenagem vencendo inércias e folgas é chamado de ta. O tempo necessário
para o sistema de freios atuar plenamente, em regime permanente, é chamado
de tb. Os projetistas tentam diminuir estes tempos projetando
convenientemente o sistema de freios e, em alguns casos, utilizando-se de
válvulas especiais, colocadas no circuito pneumático que, sendo controladas
por outras, diminuem a distância entre o reservatório de ar e o cilindro de freio.
O freio eletrônico deverá contribuir em muito para se reduzir o tempo ta
e tb.
iii. Desaceleração máxima. Desaceleração média
A desaceleração máxima, indicada na Figura (36), na iminência do
escorregamento de rodas do veículo, com a perda de estabilidade e
dirigibilidade, é usada para se obter a eficiência. Esta desaceleração máxima é
obtida na maioria dos testes realizados na pista. Uma alta eficiência do sistema
de freios de um veículo não garante por si só um pequeno espaço de parada.
Para isto é necessário também uma rápida ação do motorista e pequenos
valores de ta e tb.
A desaceleração média é obtida durante o intervalo de tempo
compreendido pela soma de ta + tb + tc. Esta desaceleração é também obtida
por muitos equipamentos de medida utilizados nos ensaios de pista.

FRENAGEM
Antonio Carlos Canale Página 38 17/5/2004
A Figura (37) mostra o tempo de resposta do freio de um ônibus obtido
em ensaio estático.
Figura 37 – Tempo de resposta de um sistema de freios de um ônibus.
iv. Seqüência para o projeto e otimização do sistema de freios de um veículo
Levantamento dos dados característicos do veículo e do pavimento.
Posicionamento do C.G. do veículo vazio e carregado. Distribuição ideal das
forças de frenagem. Definição do sistema de freios. Distribuição real.
Desempenho do veículo vazio e carregado. Desempenho em outras condições
de carga importantes. Enquadramento nas normas e leis vigentes. Ensaios de
pista.
v. Mapas de desempenho (desaceleração, espaço, tempo, eficiência) Uma forma mais rápida e segura de se fazer o projeto e otimização do sistema de freios de um veículo.

FRENAGEM
Antonio Carlos Canale Página 39 17/5/2004
O projeto e otimização do sistema de freios de um veículo pode ser
realizado com menor esforço e com maior eficiência se for conseguido através
dos mapas de desempenho. Estes mapas oferecem informações abrangentes
e claras sobre a distribuição ideal das forças de frenagem, eficiência,
desaceleração máxima, média, espaço, seqüência de escorregamento das
rodas, etc. A otimização através dos mapas garante ao usuário os requisitos
mínimos exigidos por lei em todas as condições operacionais admissíveis.
Os mapas de desempenho só podem ser obtidos utilizando-se da
técnica do passeio do C.G.. Este nome é informalmente utilizado pelos pilotos
de aeronaves e será também utilizado neste texto. O passeio do centro de
gravidade determina as possíveis posições do centro de gravidade com o
veículo carregado sem infringir limites impostos pelo fabricante e pela
legislação vigente (lei da balança).
Com o passeio do C.G. longitudinal e na vertical definidos, os mapas
podem ser obtidos, desde que se conheçam os dados do veículo, do sistema
de freios, da pista e algumas condições do meio ambiente.
Uma seqüência de gráficos serão mostrados a seguir com um veículo
simples de dois eixos (Kadett) e um veículo combinado do tipo cavalo
mecânico semi-reboque.
Figura 38 – Posição do C.G. do Kadett em peso em ordem de marcha.

FRENAGEM
Antonio Carlos Canale Página 40 17/5/2004
Figura 39 – Peso dinâmico.
Figura 40 – Peso dinâmico com o veículo freando a 9,44 m/s2.
PESO DINÂMICO x PESO DO VEÍCULO - Pista asfalto/concreto - ótimas condições [1,0]
0
200
400
600
800
1000
1200
1000 1100 1200 1300 1400 1500 1600Peso [kgf]
Peso
din
âmic
o [k
gf] wbf front. Esq.
wbf front. Dir.wbr front. Esq.wbr front. Dir.
Wop
Wop
9,44 m/s2Wbf - eq. (5.9)Wbf - eq. (5.10)onde B + f.w = m.b(Canale 19890) pag. 82
FRENAGEM
Antonio Carlos Canale Página 41 17/5/2004
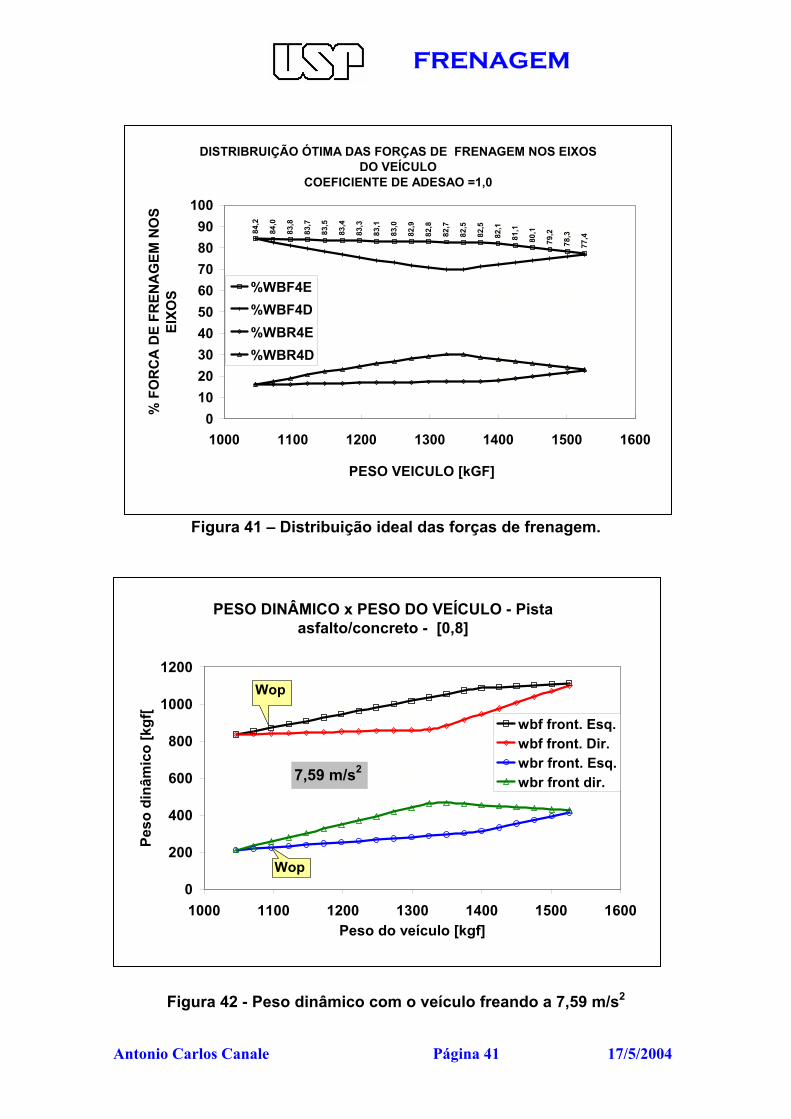
Figura 41 – Distribuição ideal das forças de frenagem.
Figura 42 - Peso dinâmico com o veículo freando a 7,59 m/s2
DISTRIBRUIÇÃO ÓTIMA DAS FORÇAS DE FRENAGEM NOS EIXOS DO VEÍCULO
COEFICIENTE DE ADESAO =1,0
84,2
84,0
83,8
83,7
83,5
83,4
83,3
83,1
83,0
82,9
82,8
82,7
82,5
82,5
82,1
81,1
80,1
79,2
78,3
77,4
0102030405060708090
100
1000 1100 1200 1300 1400 1500 1600
PESO VEICULO [kGF]
% F
OR
CA
DE
FREN
AG
EM N
OS
EIXO
S %WBF4E%WBF4D%WBR4E%WBR4D
PESO DINÂMICO x PESO DO VEÍCULO - Pista asfalto/concreto - [0,8]
0
200
400
600
800
1000
1200
1000 1100 1200 1300 1400 1500 1600Peso do veículo [kgf]
Peso
din
âmic
o [k
gf[
wbf front. Esq.wbf front. Dir.wbr front. Esq.wbr front dir.
Wop
Wop
7,59 m/s2

FRENAGEM
Antonio Carlos Canale Página 42 17/5/2004
Figura 43 - Peso dinâmico com o veículo freando a 3,88 m/s2
Figura 44 – Distribuição ideal e real com o veículo freando a 9,44 m/s2.
PESO DINÂMICO x PESO DO VEÍCULO [kgf] - pista asfalto/concreto molhada [0,4]
0
200
400
600
800
1000
1200
1000 1100 1200 1300 1400 1500 1600PESO VEÍCULO [kgf]
PESO
DIN
ÂM
ICO
[kgf
]
wbf front. Esq.wbf front. Dir.wbr front. Esq.wbr front. Dir.
Wop
Wop
3,88 m/s2
DISTRIBUIÇÃO REAL E IDEAL
0102030405060708090
100
1000 1100 1200 1300 1400 1500 1600PESO DO VEÍCULO [kgf]
% F
OR
ÇA
DE
FREN
AG
EM
%wbf front. Esq.%wbf front. Dir.%wbr front. Esq.%wbr front. Dir.distrib. Real eixo diant.distrib. Real eixo tras.
Wop
Wop
9,44 m/s2
%wbf =(wbf/W)*100%wbr =(wbf/W)*100real 85%/15%

FRENAGEM
Antonio Carlos Canale Página 43 17/5/2004
Figura 45 – Distribuição ideal e real 80%/20%
Figura 46 – Desaceleração com 85%/15%
DISTRIBUIÇÃO REAL E IDEAL
0
10
20
30
40
50
60
70
80
90
100
1000 1100 1200 1300 1400 1500 1600PESO DO VEÍCULO [kgf]
% F
OR
ÇA
DE
FREN
AG
EM
%wbf front. Esq.%wbf front. Dir.%wbr front. Esq.distrib. Real eixo tras.distrib. Real eixo diant.distrib. Real eixo tras.
real 80%/20%
Desaceleração x Peso do veículo [ ∪0 = 1,0 ]
0
1
2
3
4
5
6
7
8
9
10
1000 1100 1200 1300 1400 1500 1600Peso do veículo [kgf]
Des
acel
eraç
ão [m
/s2 ]
desac. 85/15 front. Esq.
desac. 85/15 front. dir
desac. Max.
9,43
8,2 27,1
9,3
FRENAGEM DE EMERGÊNCIASem escorregameto dos eixos

FRENAGEM
Antonio Carlos Canale Página 44 17/5/2004
Figura 47 - Desaceleração com 85%/15% - adesão 0,8
Figura 48 - Desaceleração com 85%/15% - adesão 0,4
Desaceleração x Peso do veículo [∪0 = 0,8 ]
0
1
2
3
4
5
6
7
8
9
10
1000 1100 1200 1300 1400 1500 1600Peso do veículo [kgf]
Des
acel
eraç
ão [m
/s2 ]
desac. 85/15 front. Esq.desac. 85/15 front. dirdesac. Max.
7,59 m/s2
6,15
6,25
5,38
7,03
FRENAGEM DE EMERGÊNCIASem escorregameto dos eixos
Desaceleração x Peso do veículo [ ∪0 = 0,4 ]
0
1
2
3
4
5
6
7
8
9
10
1000 1100 1200 1300 1400 1500 1600Peso do veículo [kgf]
Des
acel
eraç
ão [m
/s2 ]
desac. 85/15 front. Esq.
desac. 85/15 front. dir.
desac. Max.
3,89 m/s2
3,22
2,86
2,72,47
FRENAGEM DE EMERGÊNCIASem escorregameto dos eixos

FRENAGEM
Antonio Carlos Canale Página 45 17/5/2004
Figura 49 – Coeficiente de adesão utilizado – aderência máxima 1,0 – distribuição forças de frenagem 85%/15% .
Figura 50 - Coeficiente de adesão utilizado – aderência máxima 0,8 – distribuição forças frenagem 85%/15% .
COEFICIENTE DE ADESÃO USADO x PESO DO VEÍCULO [∪0 = 1,0 ] - 85%/15%
00,10,20,30,40,50,60,70,80,9
1
1000 1100 1200 1300 1400 1500 1600Peso do veículo [kgf]
Coe
f. ad
esão
util
izad
o
mi máx. diant.mi front. Esq.mi front. Dir.
COEFICIENTE DE ADESÃO USADO x PESO DO VEÍCULO [∪0 = 0,8 ] - 85%/15%
00,10,20,30,40,50,60,70,80,9
1
1000 1100 1200 1300 1400 1500 1600Peso do veículo [kgf]
Coe
f. ad
esão
util
izad
o
mi máx eixo diant.mi front. Esq.mi front. Dir.
FRENAGEM
Antonio Carlos Canale Página 46 17/5/2004
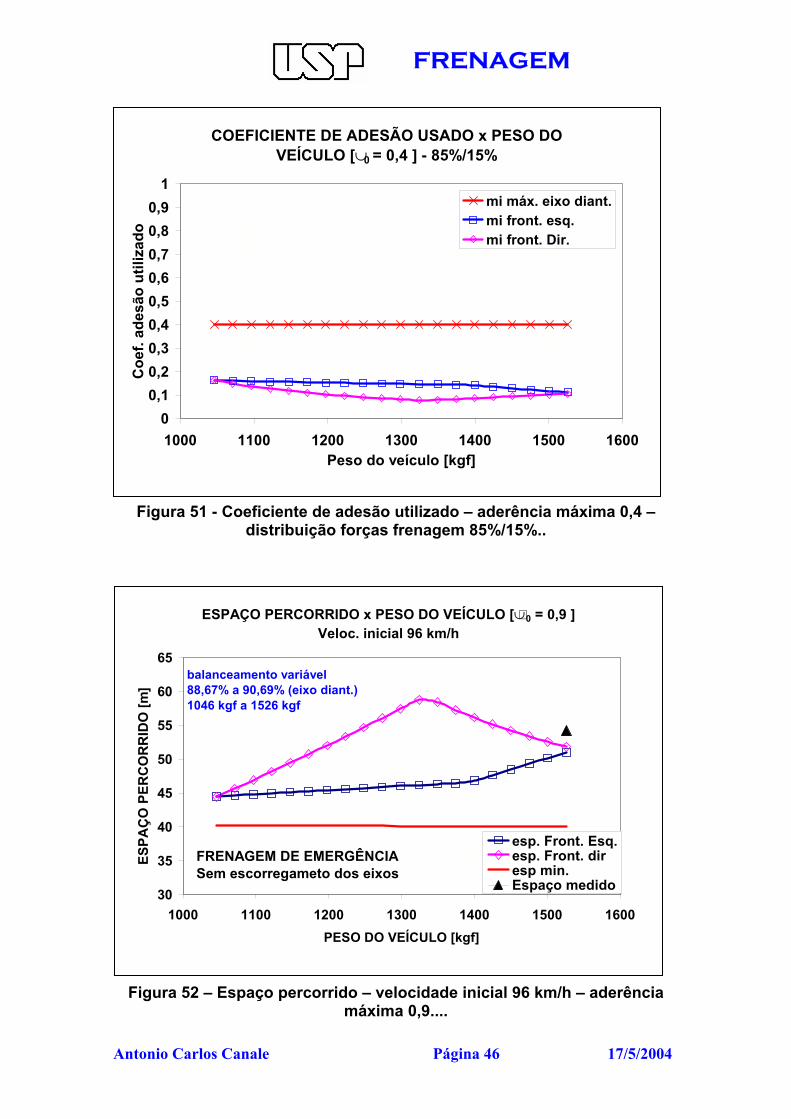
Figura 51 - Coeficiente de adesão utilizado – aderência máxima 0,4 – distribuição forças frenagem 85%/15%..
Figura 52 – Espaço percorrido – velocidade inicial 96 km/h – aderência máxima 0,9....
COEFICIENTE DE ADESÃO USADO x PESO DO VEÍCULO [∪0 = 0,4 ] - 85%/15%
00,10,20,30,40,50,60,70,80,9
1
1000 1100 1200 1300 1400 1500 1600Peso do veículo [kgf]
Coe
f. ad
esão
util
izad
o
mi máx. eixo diant.mi front. esq.mi front. Dir.
ESPAÇO PERCORRIDO x PESO DO VEÍCULO [∪0 = 0,9 ]Veloc. inicial 96 km/h
30
35
40
45
50
55
60
65
1000 1100 1200 1300 1400 1500 1600PESO DO VEÍCULO [kgf]
ESPA
ÇO
PER
CO
RR
IDO
[m]
esp. Front. Esq.esp. Front. diresp min.Espaço medido
FRENAGEM DE EMERGÊNCIASem escorregameto dos eixos
balanceamento variável88,67% a 90,69% (eixo diant.)1046 kgf a 1526 kgf

FRENAGEM
Antonio Carlos Canale Página 47 17/5/2004
Figura 53 - Espaço percorrido – velocidade inicial 129 km/h – aderência máxima 0,8.
Figura 54 – Desaceleração com aderência de 1,0 e distribuição forças de frenagem 80%/20%..
ESPAÇO PERCORRIDO x PESO DO VEÍCULO [ ∪0 = 0,8 ]Veloc. inicial 129 km/h
60
70
80
90
100
110
120
1000 1100 1200 1300 1400 1500 1600PESO DO VEÍCULO [kgf]
ESPA
ÇO
PER
CO
RR
IDO
[m]
esp. Front. Esq.esp. Front. Dir.esp. mínimoEspaço medido
FRENAGEM DE EMERGÊNCIASem escorregameto dos eixos
balanceamento variável84,00% a 80,48% (eixo diant.)1046 kgf a 1526 kgf
Desaceleração x Peso do veículo [ ∪0 = 1,0 ]
7
7,5
8
8,5
9
9,5
10
1000 1100 1200 1300 1400 1500 1600Peso do veículo [kgf]
Des
acel
eraç
ão [m
/s2 ]
desac. 80/20 Front dir.desac. 80/20 Front. esq.desac. Máx.

FRENAGEM
Antonio Carlos Canale Página 48 17/5/2004
Figura 55 – Passeio do C.G. na longitudinal do semi-reboque
Figura 56 – Passeio do C.G. na vertical do semi-reboque.

FRENAGEM
Antonio Carlos Canale Página 49 17/5/2004
Figura 57 – Coeficiente de adesão utilizado com o veículo vazio
Figura 58 – Coeficiente de adesão utilizado com o veículo em peso total máximo.

FRENAGEM
Antonio Carlos Canale Página 50 17/5/2004
Figura 59 – Mapa da distribuição das forças normais no eixo dianteiro.
Figura 60 – Mapa da distribuição das forças normais no eixo traseiro do cavalo.

FRENAGEM
Antonio Carlos Canale Página 51 17/5/2004
Figura 61 – Mapa da distribuição das normais nos eixos do semi-reboque
Figura 62 – Mapa da distância de frenagem
FRENAGEM
Antonio Carlos Canale Página 52 17/5/2004
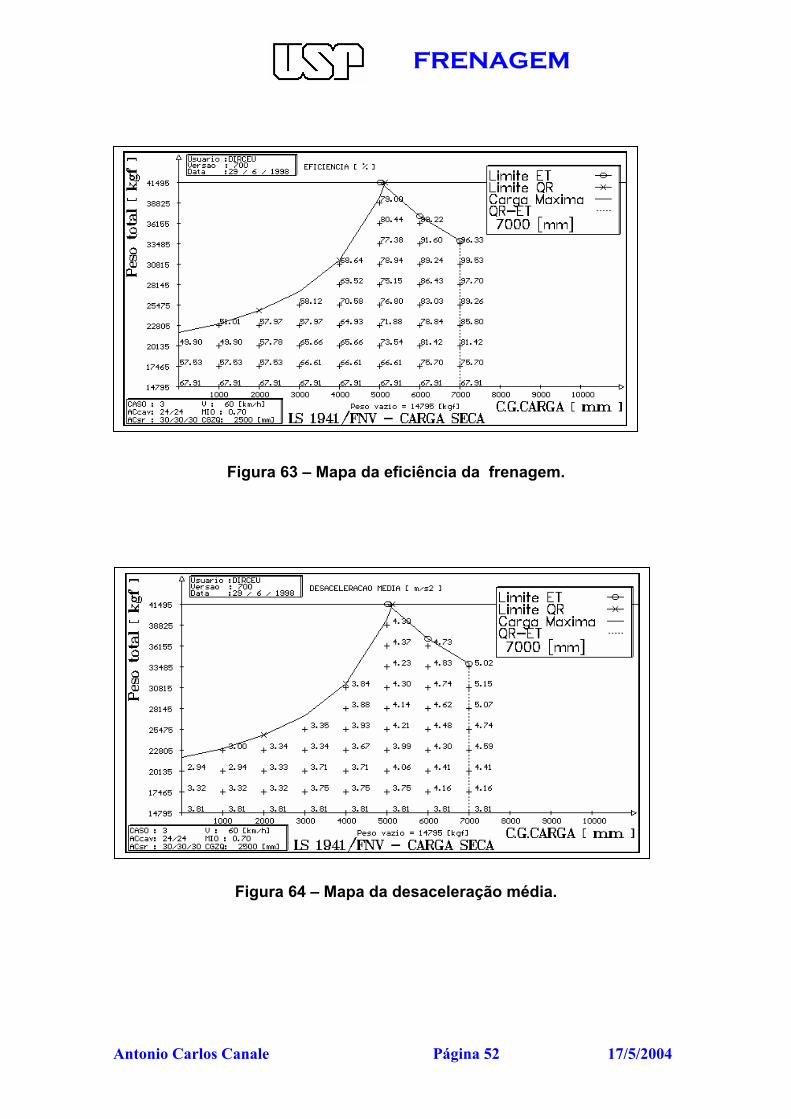
Figura 63 – Mapa da eficiência da frenagem.
Figura 64 – Mapa da desaceleração média.
FRENAGEM
Antonio Carlos Canale Página 53 17/5/2004
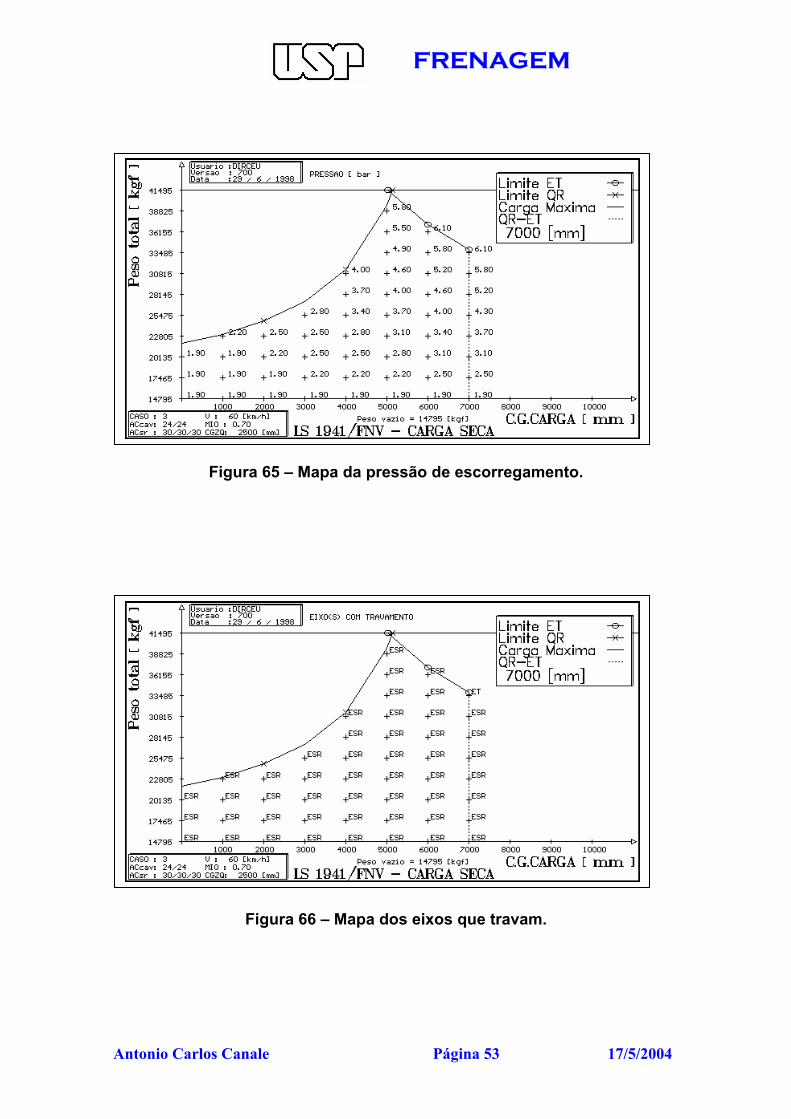
Figura 65 – Mapa da pressão de escorregamento.
Figura 66 – Mapa dos eixos que travam.

FRENAGEM
Antonio Carlos Canale Página 54 17/5/2004
Figura 67 – Mapa da aderência utilizada no eixo dianteiro.
Figura 68 – Mapa da aderência utilizada no eixo traseiro do cavalo.

FRENAGEM
Antonio Carlos Canale Página 55 17/5/2004
Figura 69 – Mapa da aderência utilizada nos eixos do semi-reboque.
Figura 70 – Mapa da desac. máxima.
FRENAGEM
Antonio Carlos Canale Página 56 17/5/2004
vi. A necessidade de se utilizar a válvula ALB para garantir a estabilidade e dirigibilidade.
Os mapas de desempenho mostraram claramente que é muito difícil se
garantir eficiência e segurança na frenagem de veículos combinados, em
particular o cavalo mecânico semi-reboque, em todas as condições
operacionais possíveis e admissíveis. Existe então a necessidade do projetista
de freios se utilizar de dispositivos especiais, como as válvulas sensoras à
desaceleração, pressão, deslocamento (ALB), etc., para aumentar o
desempenho garantindo os requisitos exigidos na lei (normas). Nos itens a
seguir mostraremos um estudo do cavalo semi-reboque se utilizando de
válvulas ALB (automatic load sensitive braking-force metering) no circuito de
freio, com a preocupação de se enquadrar a sensibilidade do freio e os níveis
de desempenho segundo requisitos de normas. O exemplo mostrará um caso
com dados de um veículo real, onde se comparará o desempenho do cavalo
mecânico sozinho, freando com e sem a válvula ALB instalada no seu eixo
traseiro e controlando a pressão neste mesmo eixo. O programa computacional
calculará o desempenho do veículo freando utilizando-se das equações já
vistas anteriormente, considerando a atuação da válvula ALB, alterando a
pressão no eixo traseiro do cavalo conforme as curvas características da
válvula
Após o estudo do desempenho do cavalo, se fará o estudo do
desempenho da composição cavalo mecânico semi-reboque, com e sem a
válvula ALB, instalada no eixo traseiro do cavalo e controlando a pressão neste
mesmo eixo.
vii. Desempenho com válvulas ALB e sem ALB. O gráfico da Figura (71) mostra a relação entre a desaceleração pela
pressão do cavalo mecânico freando nas condições ideais de frenagem. Os
coeficientes de adesão utilizados nos eixos são iguais e chegam ao máximo µ0
ao mesmo tempo. A desaceleração máxima (6,82 m/s2) será utilizada para o
cálculo da eficiência numa pista com coeficiente de aderência de 0,7. A
eficiência é de 100% por ser a frenagem desenvolvida nas condições ideais.

FRENAGEM
Antonio Carlos Canale Página 57 17/5/2004
Figura 71 – O gráfico mostra o coeficiente de adesão utilizado nos dois eixos do cavalo mecânico na distribuição ideal das forças de
frenagem
Figura 72 – Coeficientes de adesão utilizados nos eixos do cavalo mecânico com cilindros de 24/24
Desaceleração do cavalo-mecânico nas condições ideais Distribuição ideal
0
1
2
3
4
5
6
7
8
0 1 2 3 4 5 6 7pressão [bar]
desa
cele
raçã
o [m
/s2 ]
DESACEL.
ef=100%b=6,82m/s2
S=28m
Coeficientes de adesão do cavalo-mecânico nas condições atuais ( cilindros de freio: ED 24; ET 24)
00,10,20,30,40,50,60,70,8
0 1 2 3 4 5 6 7pressão [bar]
coef
. ade
são
EDCETC
ETCP= 2,40 bar
EDCP= 5,32 bar
FRENAGEM
Antonio Carlos Canale Página 58 17/5/2004
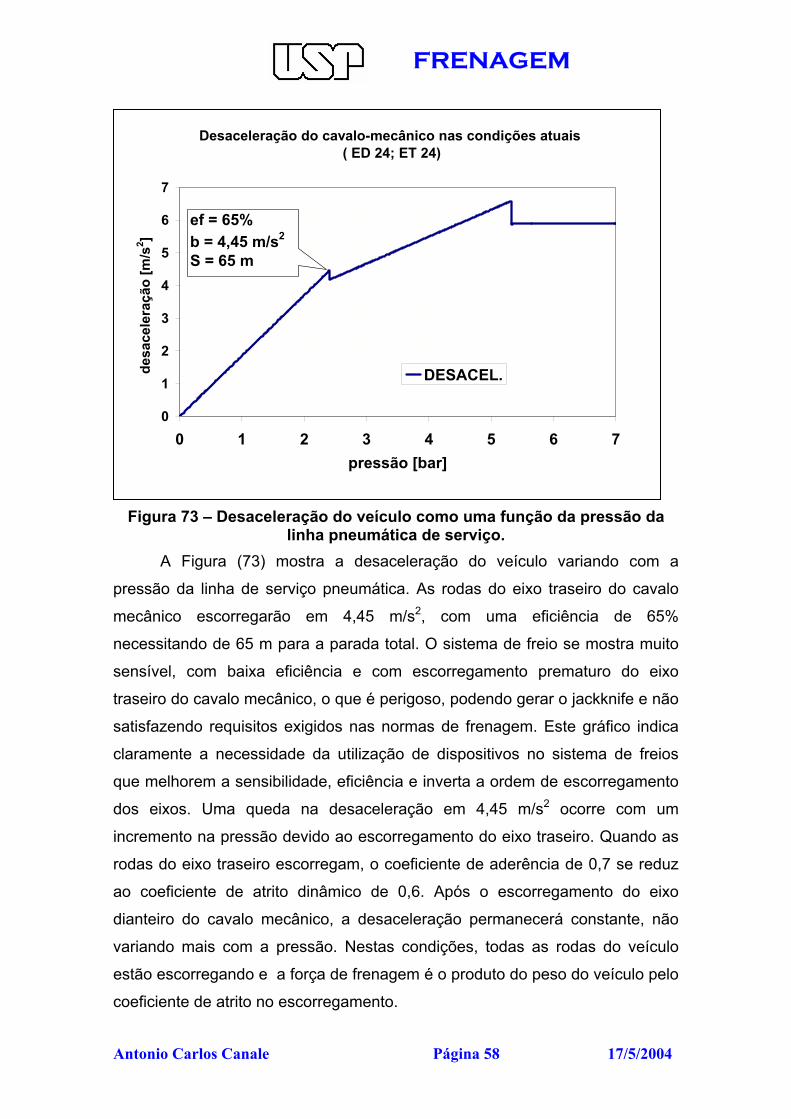
Figura 73 – Desaceleração do veículo como uma função da pressão da linha pneumática de serviço.
A Figura (73) mostra a desaceleração do veículo variando com a
pressão da linha de serviço pneumática. As rodas do eixo traseiro do cavalo
mecânico escorregarão em 4,45 m/s2, com uma eficiência de 65%
necessitando de 65 m para a parada total. O sistema de freio se mostra muito
sensível, com baixa eficiência e com escorregamento prematuro do eixo
traseiro do cavalo mecânico, o que é perigoso, podendo gerar o jackknife e não
satisfazendo requisitos exigidos nas normas de frenagem. Este gráfico indica
claramente a necessidade da utilização de dispositivos no sistema de freios
que melhorem a sensibilidade, eficiência e inverta a ordem de escorregamento
dos eixos. Uma queda na desaceleração em 4,45 m/s2 ocorre com um
incremento na pressão devido ao escorregamento do eixo traseiro. Quando as
rodas do eixo traseiro escorregam, o coeficiente de aderência de 0,7 se reduz
ao coeficiente de atrito dinâmico de 0,6. Após o escorregamento do eixo
dianteiro do cavalo mecânico, a desaceleração permanecerá constante, não
variando mais com a pressão. Nestas condições, todas as rodas do veículo
estão escorregando e a força de frenagem é o produto do peso do veículo pelo
coeficiente de atrito no escorregamento.
Desaceleração do cavalo-mecânico nas condições atuais ( ED 24; ET 24)
0
1
2
3
4
5
6
7
0 1 2 3 4 5 6 7pressão [bar]
desa
cele
raçã
o [m
/s2 ]
DESACEL.
ef = 65%b = 4,45 m/s2
S = 65 m

FRENAGEM
Antonio Carlos Canale Página 59 17/5/2004
Figura 74 – Desenho da válvula ALB e sua instalação no eixo traseiro do cavalo mecânico. A válvula mede a deformação e controla a pressão no
eixo traseiro do cavalo mecânico.
FRENAGEM
Antonio Carlos Canale Página 60 17/5/2004
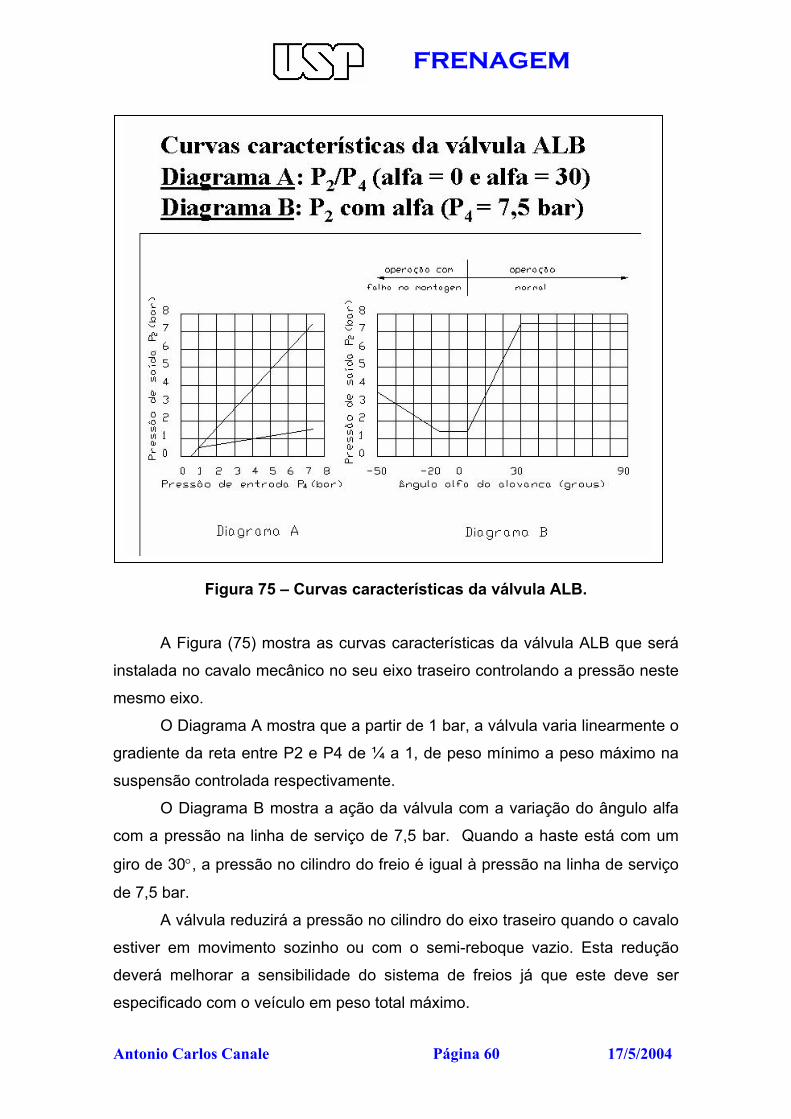
Figura 75 – Curvas características da válvula ALB.
A Figura (75) mostra as curvas características da válvula ALB que será
instalada no cavalo mecânico no seu eixo traseiro controlando a pressão neste
mesmo eixo.
O Diagrama A mostra que a partir de 1 bar, a válvula varia linearmente o
gradiente da reta entre P2 e P4 de ¼ a 1, de peso mínimo a peso máximo na
suspensão controlada respectivamente.
O Diagrama B mostra a ação da válvula com a variação do ângulo alfa
com a pressão na linha de serviço de 7,5 bar. Quando a haste está com um
giro de 30°, a pressão no cilindro do freio é igual à pressão na linha de serviço
de 7,5 bar.
A válvula reduzirá a pressão no cilindro do eixo traseiro quando o cavalo
estiver em movimento sozinho ou com o semi-reboque vazio. Esta redução
deverá melhorar a sensibilidade do sistema de freios já que este deve ser
especificado com o veículo em peso total máximo.
FRENAGEM
Antonio Carlos Canale Página 61 17/5/2004
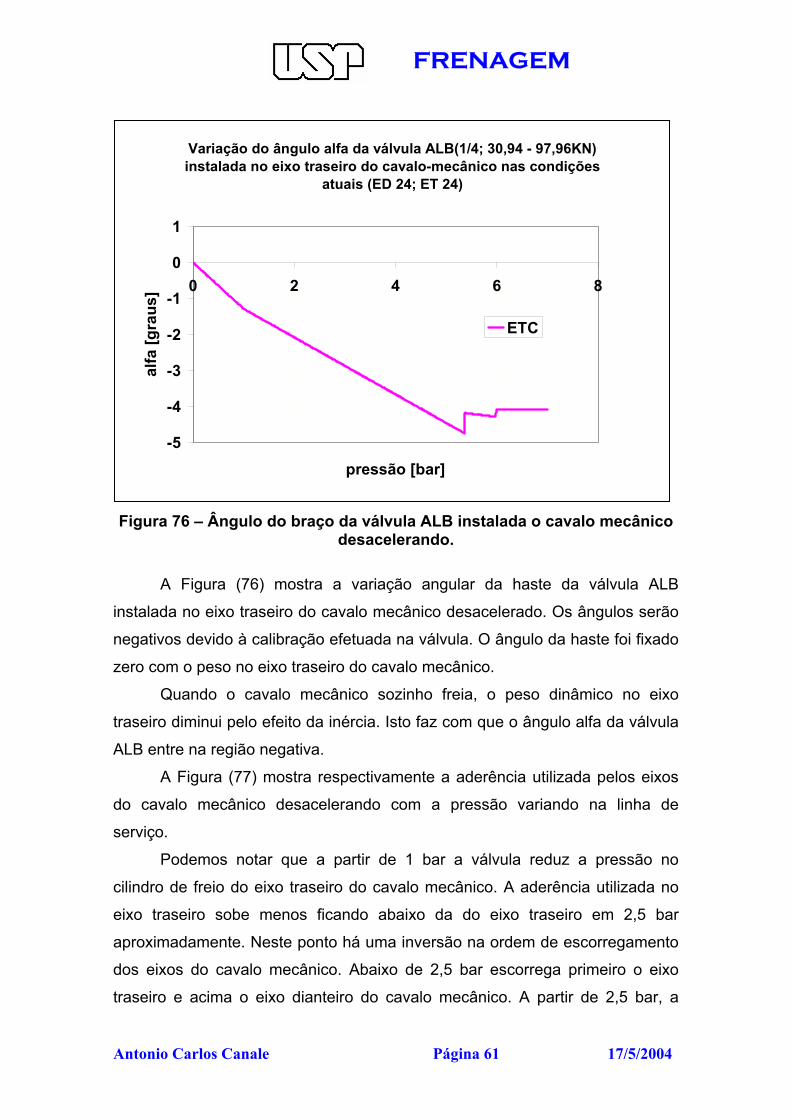
Figura 76 – Ângulo do braço da válvula ALB instalada o cavalo mecânico
desacelerando. A Figura (76) mostra a variação angular da haste da válvula ALB
instalada no eixo traseiro do cavalo mecânico desacelerado. Os ângulos serão
negativos devido à calibração efetuada na válvula. O ângulo da haste foi fixado
zero com o peso no eixo traseiro do cavalo mecânico.
Quando o cavalo mecânico sozinho freia, o peso dinâmico no eixo
traseiro diminui pelo efeito da inércia. Isto faz com que o ângulo alfa da válvula
ALB entre na região negativa.
A Figura (77) mostra respectivamente a aderência utilizada pelos eixos
do cavalo mecânico desacelerando com a pressão variando na linha de
serviço.
Podemos notar que a partir de 1 bar a válvula reduz a pressão no
cilindro de freio do eixo traseiro do cavalo mecânico. A aderência utilizada no
eixo traseiro sobe menos ficando abaixo da do eixo traseiro em 2,5 bar
aproximadamente. Neste ponto há uma inversão na ordem de escorregamento
dos eixos do cavalo mecânico. Abaixo de 2,5 bar escorrega primeiro o eixo
traseiro e acima o eixo dianteiro do cavalo mecânico. A partir de 2,5 bar, a
Variação do ângulo alfa da válvula ALB(1/4; 30,94 - 97,96KN) instalada no eixo traseiro do cavalo-mecânico nas condições
atuais (ED 24; ET 24)
-5
-4
-3
-2
-1
0
1
0 2 4 6 8
pressão [bar]
alfa
[gra
us]
ETC

FRENAGEM
Antonio Carlos Canale Página 62 17/5/2004
demanda de aderência nos eixos aumenta muito próxima uma da outra
indicando uma distribuição das forças de frenagem próxima da ideal. O eixo
dianteiro do cavalo escorregará com 5,36 bar, 6,82 m/s2, com eficiência de
99,4% parando em 28 m.
Figura 77 – As Figuras mostram a variação do coeficiente de adesão utilizado e a desaceleração correspondente pela pressão na linha de
serviço.
Coeficientes de adesão do cavalo-mecânico nas condições atuais com válvula ALB(1/4; 30,94 - 97,96KN) ( ED 24; ET 24)
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0 2 4 6 8pressão [bar]
coef
. ade
são
EDCP=5,36 bar
ETCP=5,90
Válvula ALBMede eixo traseiroControla eixo traseiro
Desaceleração do cavalo-mecânico nas condições atuais com válvula ALB(1/4; 30,94 - 97,96KN) no eixo traseiro ( ED 24; ET 24)
0
1
2
3
4
5
6
7
8
0 2 4 6 8pressão [bar]
desa
cele
raçã
o [m
/s2 ]
DESACEL.
b = 6,82 m/s2
ef = 99,40%S = 27,86m

FRENAGEM
Antonio Carlos Canale Página 63 17/5/2004
Figura 78 – Pressão nos cilindros dos freios dianteiro e traseiro do cavalo
mecânico.
Figura 79 – Força de frenagem nos eixos dianteiro e traseiro do cavalo mecânico
Pressão nos cilindros de freio do cavalo-mecânico nas condições atuais com a válvula ALB (1/4; 30,94 - 97,96KN)
instalada no eixo traseiro (ED 24; ET 24)
012345678
0 2 4 6 8pressão na linha [bar]
pres
são
nos
cilin
dros
de
frei
o [b
ar]
EDCETC
Forças de frenagem no cavalo-mecânico nas condições atuais com válvula ALB(1/4; 30,94 - 97,96KN) (ED 24; ET 24)
05000
10000150002000025000300003500040000
0 2 4 6 8pressão [bar]
forç
as d
e fr
enag
em [N
]
EDCETC
FRENAGEM
Antonio Carlos Canale Página 64 17/5/2004
A Figura (78) mostra que a partir de 1 bar de pressão na linha de
serviço, a pressão no cilindro de freio do eixo traseiro do cavalo mecânico é
reduzida. O gráfico mostra também a pressão em que ocorre o
escorregamento do eixo dianteiro do cavalo e o escorregamento do eixo
traseiro com a queda de força correspondente. A força de frenagem diminui no
escorregamento, pois o coeficiente de atrito no escorregamento é menor que o
coeficiente de adesão (no rolamento).
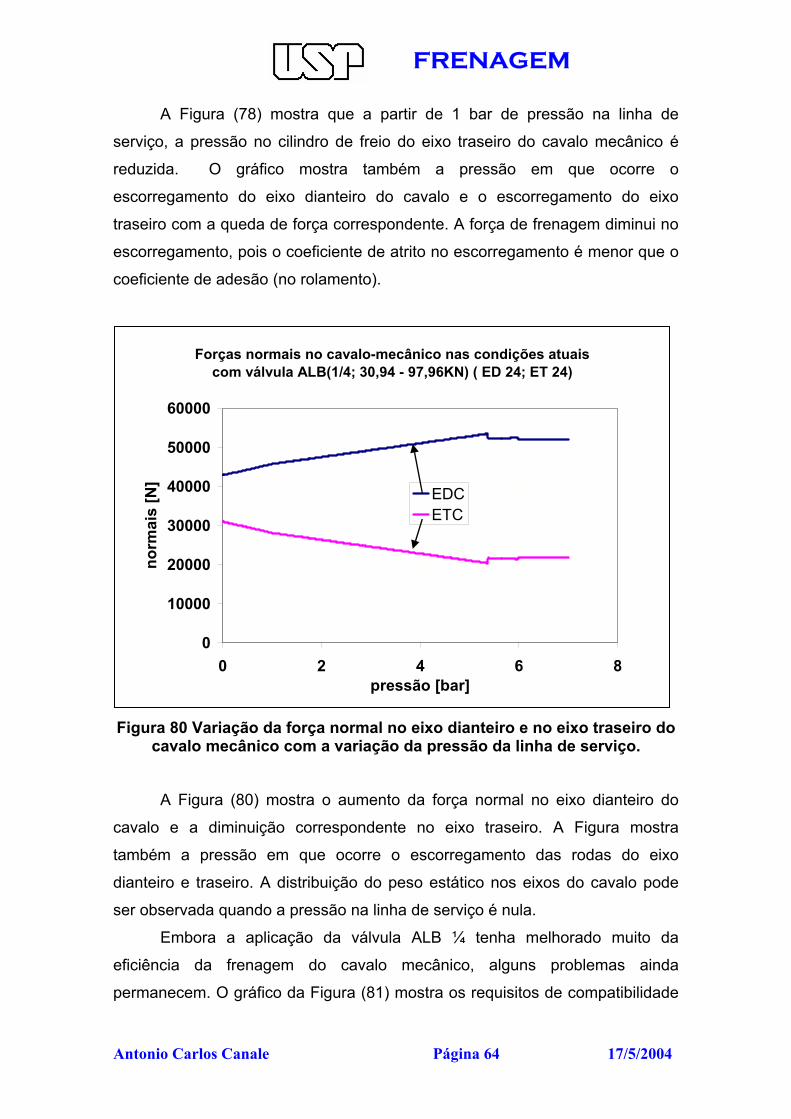
Figura 80 Variação da força normal no eixo dianteiro e no eixo traseiro do cavalo mecânico com a variação da pressão da linha de serviço.
A Figura (80) mostra o aumento da força normal no eixo dianteiro do
cavalo e a diminuição correspondente no eixo traseiro. A Figura mostra
também a pressão em que ocorre o escorregamento das rodas do eixo
dianteiro e traseiro. A distribuição do peso estático nos eixos do cavalo pode
ser observada quando a pressão na linha de serviço é nula.
Embora a aplicação da válvula ALB ¼ tenha melhorado muito da
eficiência da frenagem do cavalo mecânico, alguns problemas ainda
permanecem. O gráfico da Figura (81) mostra os requisitos de compatibilidade
Forças normais no cavalo-mecânico nas condições atuais com válvula ALB(1/4; 30,94 - 97,96KN) ( ED 24; ET 24)
0
10000
20000
30000
40000
50000
60000
0 2 4 6 8pressão [bar]
norm
ais
[N]
EDCETC
FRENAGEM
Antonio Carlos Canale Página 65 17/5/2004
do cavalo mecânico conforme a ECE – 13 e o comportamento do cavalo
mecânico com a válvula ALB ¼.
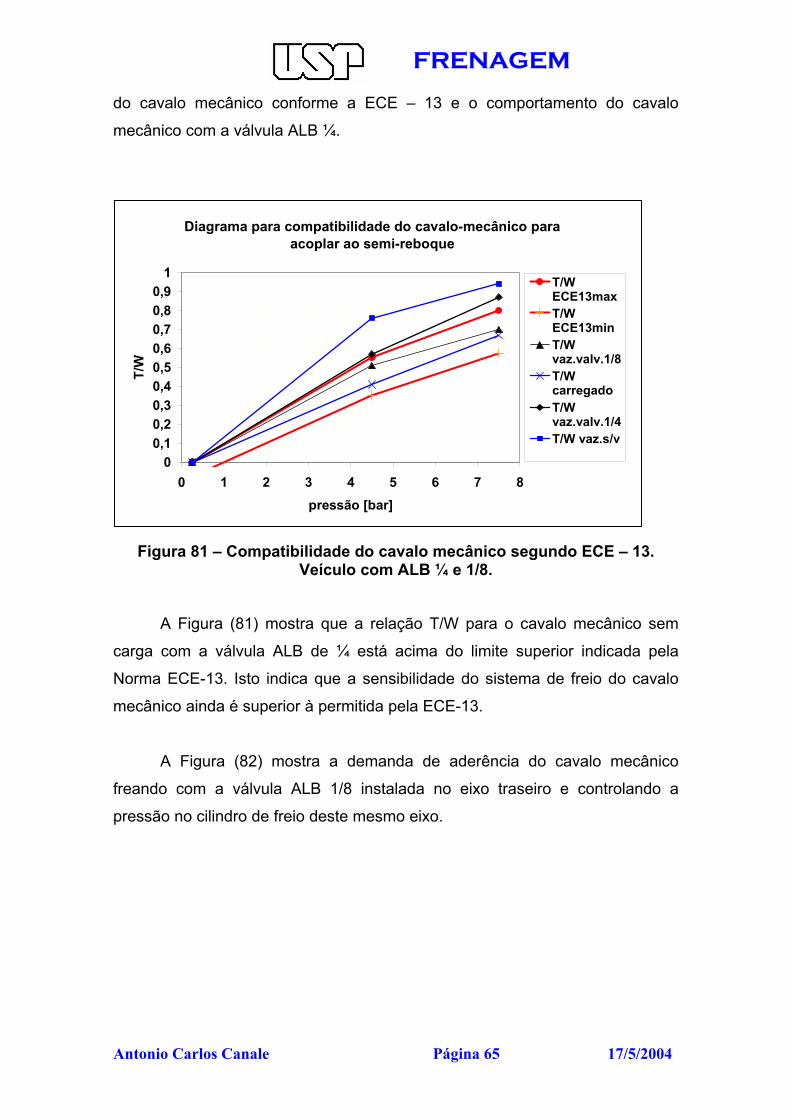
Figura 81 – Compatibilidade do cavalo mecânico segundo ECE – 13. Veículo com ALB ¼ e 1/8.
A Figura (81) mostra que a relação T/W para o cavalo mecânico sem
carga com a válvula ALB de ¼ está acima do limite superior indicada pela
Norma ECE-13. Isto indica que a sensibilidade do sistema de freio do cavalo
mecânico ainda é superior à permitida pela ECE-13.
A Figura (82) mostra a demanda de aderência do cavalo mecânico
freando com a válvula ALB 1/8 instalada no eixo traseiro e controlando a
pressão no cilindro de freio deste mesmo eixo.
Diagrama para compatibilidade do cavalo-mecânico para acoplar ao semi-reboque
00,10,20,30,40,50,60,70,80,9
1
0 1 2 3 4 5 6 7 8pressão [bar]
T/W
T/WECE13maxT/WECE13minT/Wvaz.valv.1/8T/Wcarregado T/Wvaz.valv.1/4T/W vaz.s/v

FRENAGEM
Antonio Carlos Canale Página 66 17/5/2004
Figura 82 – Demanda do coeficiente de aderência nos eixos do cavalo mecânico com a válvula ALB 1/8.
A Figura (82) mostra uma maior redução na demanda de aderência do
eixo traseiro do cavalo mecânico com a válvula ALB 1/8. Uma queda na
eficiência é esperada quando comparada com a obtida com a válvula ALB ¼.
Com a válvula ALB de 1/8 praticamente não haverá escorregamento do eixo
traseiro antes do dianteiro sob qualquer aderência disponível entre pneu e
pavimento. Com maior redução na demanda de aderência do eixo traseiro
espera-se uma sensibilidade menor do sistema de freio do veículo podendo
ficar dentro dos limites superior e inferior indicados pela ECE-13.
A Figura (83) mostra a desaceleração do cavalo mecânico com a
variação da pressão com a válvula ALB 1/8 instalada. Com esta válvula a
eficiência (83,6%) caiu comparada com a obtida com a válvula de ¼. Em
compensação observamos uma melhora na sensibilidade do freio, estando
mais próxima da relação 1:1. A desaceleração máxima observada é de 5,74
m/s2.
O cavalo mecânico será agora acoplado ao semi-reboque mostrado na
Figura (84) e se fará a seguir o estudo do desempenho dos veículos
combinados.
Coeficientes de adesão do cavalo-mecânico nas condiçõesatuais com válvula ALB(1/8; 30,94 - 97,96KN) ( ED 24; ET 24)
00,10,20,30,40,50,60,70,8
0 2 4 6 8pressão [bar]
coef
. ade
são
EDCETC
EDCP= 5,13 bar

FRENAGEM
Antonio Carlos Canale Página 67 17/5/2004
Figura 83 – Desaceleração do cavalo mecânico com a válvula ALB 1/8 com a variação da pressão.
Figura 84 – Semi-reboque com a suspensão por balança.
A suspensão por balança interfere no desempenho da frenagem do
conjunto.
Desaceleração do cavalo-mecânico nas condições atuais com válvula ALB(1/8; 30,94 - 97,96KN) no eixo traseiro ( ED 24; ET 24)
0
1
2
3
4
5
6
7
0 2 4 6 8pressão [bar]
desa
cele
raçã
o [m
/s2 ]
DESACEL.
b = 5,74 m/s2
ef = 83,56%

FRENAGEM
Antonio Carlos Canale Página 68 17/5/2004
Figura 85 – Demanda de aderência do veículo combinado sem válvula.
Figura 86 – Desaceleração do veículo combinado sem válvula.
Coeficientes de adesão do veículo combinado carregado -atual (cilindros de freio: EDC 24, ETC 24, ESR123 - 30)
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0 2 4 6 8pressão [bar]
coef
. ade
são
EDCETCESR1ESR2ESR3
ESR1P= 2,83 bar
ESR2P= 5,26 bar
ETC
EDC
EDC
Desac. do veículo combinado carregado nas condições atuais(cilindros de freio: EDC 24, ETC 24, ESR123 - 30)
00,5
11,5
22,5
33,5
44,5
5
0 1 2 3 4 5 6 7 8pressão [bar]
desa
cele
raçã
o [m
/s2 ]
2,83 barESR12,5 m/seg2)
5,26 barESR23,83 m/seg2
ef = 66%b = 4,55 m/s2
S = 38 m

FRENAGEM
Antonio Carlos Canale Página 69 17/5/2004
O gráfico da Figura (85) mostra a demanda de aderência do veículo
combinado freando e a seqüência de escorregamento dos eixos. É interessante
de se notar que as demandas de aderência nos três eixos do semi-reboque são
diferentes. Esta é uma característica da suspensão por balança.
O veículo combinado não perderá estabilidade nem a dirigibilidade
mesmo com a pressão máxima na linha de serviço.
A Figura (86) mostra a desaceleração do veículo combinado na mesma
condição operacional do da Figura (85). Este gráfico mostra que o veículo não
perderá a estabilidade nem a dirigibilidade, mas com uma eficiência na
frenagem de 66% com pressão máxima da linha de serviço. A desaceleração
máxima será de 4,55 m/s2 e o espaço necessário para uma parada total de 38
m com velocidade inicial de 60 km/h. O gráfico mostra haver a necessidade de
se aumentar a potência do freio no semi-reboque. Isto pode ser feito
aumentando-se a área dos cilindros dos freios do semi-reboque. Esta figura e a
anterior mostram que mesmo com o veículo em peso total máximo, ocorrerá
um escorregamento prematuro do primeiro eixo do semi-reboque. Embora este
escorregamento não implique em perda de dirigibilidade ou estabilidade, os
pneumáticos travados escorregando sobre o pavimento onde apresentarão
desgaste rápido e aumento localizado de temperatura indesejado que pode
comprometer o seu desempenho futuro. A Figura (86) mostra que acima de 2,5
m/s2 a sensibilidade do freio é decrescente ficando também abaixo da relação
1:1.
Os gráficos das Figuras (87) e (88) mostram escorregamentos
prematuros de rodas dos eixos do veículo combinado e uma sensibilidade alta.
A sensibilidade alta deverá ser corrigida com a utilização de válvulas no semi-
reboque ou outros dispositivos semi-automáticos ou automáticos. Estes
dispositivos podem também retardar o escorregamento prematuro das rodas
dos eixos do semi-reboque, como mostrado claramente na Figura (87).
A figura (88) mostra que o veículo vazio terá uma eficiência de 85,7%,
com uma desaceleração máxima de 5,88 m/s2, precisando de 31 m para uma
parada total de uma velocidade inicial de 60 km/h.
A Figura (88) mostra que o veículo perderá a estabilidade com o
escorregamento do terceiro eixo do semi-reboque e das rodas do eixo do
cavalo mecânico, o que poderá gerar o jackknife.

FRENAGEM
Antonio Carlos Canale Página 70 17/5/2004
Figura 87 – Demanda de aderência do veículo combinado vazio freando sem a válvula ALB.
Figura 88 – Desaceleração do veículo combinado vazio freando sem a válvula ALB.
Coefics. de adesão do veículo combinado vazio -atual (cilindros de freio: EDC 24, ETC 24, ESR123 - 30)
00,10,20,30,40,50,60,70,80,9
1
0 2 4 6 8pressão [bar]
coef
. ade
são
EDCETCESR1ESR2ESR3
ESR1P= 0,69 bar
ESR2P= 1,35 bar
ETC, ESR3P= 3,87 bar
EDCP= 6,00 bar
Desac. do veículo combinado vazio - atual(cilindros de freio: EDC 24, ETC 24, ESR123 - 30)
0
1
2
3
4
5
6
7
0 1 2 3 4 5 6 7 8pressão [bar]
desa
cele
raçã
o [m
/s^2
]
ef = 85,69 %b= 5,88 m/s2
S= 31 m ESR3 e ETC
0,69 barESR11,7 m/seg2
1,35 barESR22,7 m/seg2

FRENAGEM
Antonio Carlos Canale Página 71 17/5/2004
Figura 89 – Demanda de aderência do veículo combinado freando com a válvula ALB.
Figura 90 – Desaceleração do veículo combinado freando com a válvula ALB.
Coeficientes de adesão do cavalo-semireboque com válvula ALB(1/4; 30,94 - 97,96KN) ( 24:24-30:30:30)
00,10,20,30,40,50,60,70,80,9
1
0 1 2 3 4 5 6 7 8pressão [bar]
coef
. ade
são
EDCETCESR1ESR2ESR3
ESR1P= 0,69 bar
ESR2P= 1,35 bar
ESR3P= 3,87 bar
EDCP= 6,00 bar
ETC
Desac. do cavalo-semireboque - atual com válvula ALB(1/4; 30,94 - 97,96KN) no eixo traseiro ( 24:24-30:30:30)
0
1
2
3
4
5
6
7
0 1 2 3 4 5 6 7 8pressão (bar)
Des
acel
eraç
ao (m
/seg
2 )
0,69 barESR11,7 m/seg2
1,39 barESR22,6 m/seg2 ef = 73,1 %
b= 5,02 m/s2
S= 35,2 m ESR3
FRENAGEM
Antonio Carlos Canale Página 72 17/5/2004
Os gráficos das Figuras (89) e (90) mostram respectivamente a
demanda de aderência do veículo combinado vazio com a atuação da válvula
ALB instalada no eixo traseiro do cavalo mecânico e controlando este mesmo
eixo. A Figura (89) mostra a queda da demanda de aderência no eixo traseiro
do cavalo mecânico acima de 1 bar de pressão na linha de serviço. É a
atuação da válvula ALB que faz esta redução.
A Figura (90) mostra a eficiência de 73,1 % para o veículo combinado
vazio com a válvula ALB e de 85,7% sem esta mesma válvula (Figura (88)).
Com a redução da força de frenagem no eixo do cavalo mecânico com a
atuação da válvula ALB, houve também uma pequena redução na sensibilidade
do sistema, mas insuficiente para corrigir este problema.
O veículo combinado perderá a estabilidade com o escorregamento dos
três eixos do semi-reboque em 5,02 m/s2, precisando de 35,2 m para a parada
total partindo de uma velocidade inicial de 60 km/h.
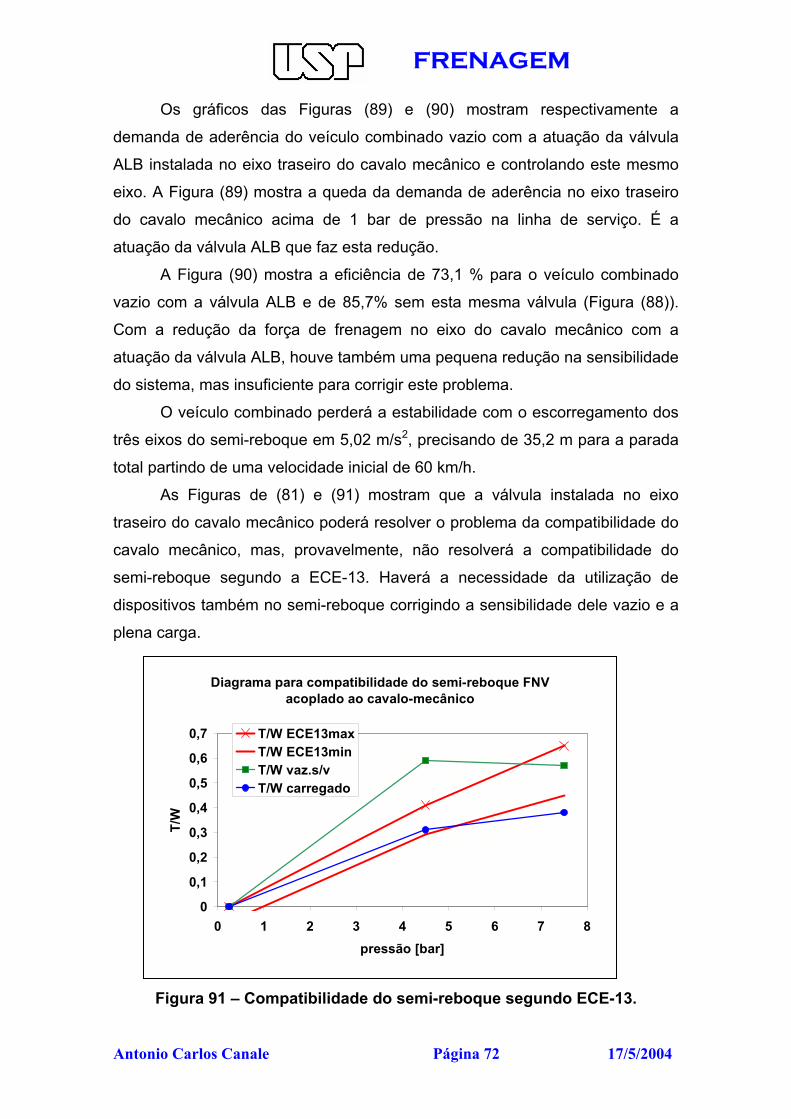
As Figuras de (81) e (91) mostram que a válvula instalada no eixo
traseiro do cavalo mecânico poderá resolver o problema da compatibilidade do
cavalo mecânico, mas, provavelmente, não resolverá a compatibilidade do
semi-reboque segundo a ECE-13. Haverá a necessidade da utilização de
dispositivos também no semi-reboque corrigindo a sensibilidade dele vazio e a
plena carga.
Figura 91 – Compatibilidade do semi-reboque segundo ECE-13.
Diagrama para compatibilidade do semi-reboque FNV acoplado ao cavalo-mecânico
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0 1 2 3 4 5 6 7 8pressão [bar]
T/W
T/W ECE13maxT/W ECE13minT/W vaz.s/vT/W carregado
FRENAGEM
Antonio Carlos Canale Página 73 17/5/2004
6. A influência da temperatura no perfil típico desaceleração x tempo de uma frenagem de emergência. a) Energia gerada em forma de calor nos eixos de um veículo de
transporte de carga pesado na frenagem de emergência. No estudo desenvolvido anteriormente sobre a frenagem, as equações
elementares de movimento desacelerado foram estabelecidas através das
forças agindo no veículo durante uma desaceleração. Estas equações não
consideram os limites de desempenho do freio impostos pela razão de
conversão de energia de movimento em energia térmica nas faces que se
atritam.
A frenagem é uma conversão de energia cinética e potencial em calor.
Esta conversão se dá no atrito das lonas e tambores (pastilhas/discos) ou,
indesejavelmente, na área de contato do pneu com o solo.
Um fator limitante do desempenho do freio é a temperatura das faces
que se atritam. Isto porque o coeficiente de atrito entre elas decresce com o
aumento da temperatura, diminuindo consequentemente o fator de freio C* e o
torque de frenagem. Além disto, um aumento exagerado da temperatura
diminui a resistência à abrasão das pastilhas e lonas, diminuindo com isto sua
vida útil. Podemos dizer então que no projeto dos freios os limites de
temperatura dos materiais que se atritam devem ser observados.
Em uma frenagem de emergência a energia gerada é geralmente alta e
uma pequena parte dela é dissipada para o meio ambiente através da
condução, radiação e convecção forçada. A maioria dos modelos matemáticos
que estudam o desempenho de veículos automotores rodoviários freando em
emergência despreza a energia perdida para o meio ambiente, a influência das
forças de resistência do ar, do rolamento e das inércias do sistema de
transmissão e rodas e do torque de resistência do motor.
A Figura (92) mostra a potência média máxima gerada durante uma
frenagem de emergência de um cavalo mecânico semi-reboque freando nas
condições ideais, em emergência, partindo de uma velocidade inicial de 120
km/h em pista de asfalto/concreto em boas condições de uso (µ0 = 0,7).

FRENAGEM
Antonio Carlos Canale Página 74 17/5/2004
Figura 92 – Potência média gerada na frenagem sem perda de calor para o meio ambiente.
Para o cálculo da potência média foi utilizada a equação (5.69), pág. 97
de (Canale, 1989). Nesta equação foi usado b = µ0 x g (distribuição ideal das
forças de frenagem nos eixos do veículo). Para uma distribuição das forças de
frenagem nos eixos do veículo não ideal, a potência média pode ser obtida
multiplicando-se a potência média total do gráfico acima pela eficiência do
sistema de freios.
Quase toda a energia gerada durante a frenagem será armazenada nos
discos ou tambores do sistema de freios. Isto fará com que a temperatura entre
as pastilhas e discos ou lonas e tambores aumente rapidamente. O aumento
da temperatura entre as faces que se atritam pode alterar significativamente o
coeficiente de atrito entre as superfícies provocando uma variação no fator de
freio C* de cada conjunto instalado no veículo. Esta variação poderá alterar o
desempenho do sistema de freios do veículo durante o tempo da frenagem.
Será mostrado a seguir um estudo realizado com o sistema de freios de um
ônibus freando em emergência e se considerando o efeito da temperatura no
desempenho do sistema de freios instalado.
b) Variação da temperatura dos tambores/discos.
Potência média máxima gerada no cavalo semi-reboque freando em emergência em pista com
aderência de 0,7
02000
40006000
800010000
1200014000
16000
14000 19000 24000 29000 34000 39000 44000Peso combinado em kgf
Potê
ncia
em
CV
NbmfNbmrNbmcNbmtotal

FRENAGEM
Antonio Carlos Canale Página 75 17/5/2004
Figura 93 – Temperatura do par lona/tambor do ônibus freando no eixo traseiro
A Figura (93) mostra a variação da temperatura nos freios traseiros do
ônibus em questão durante uma frenagem total de emergência.
A variação da temperatura do tambor ou disco pode ser obtida
usando-se a eq. (5.71) de (Canale 1989), pag. 98. Deve-se conhecer a
temperatura inicial que no gráfico acima foi considerada de 100 °C. Deve-se
obter a massa do aro do disco que se encontra diretamente em contato com as
pastilhas ou o anel em contato direto com a lona no caso dos tambores.
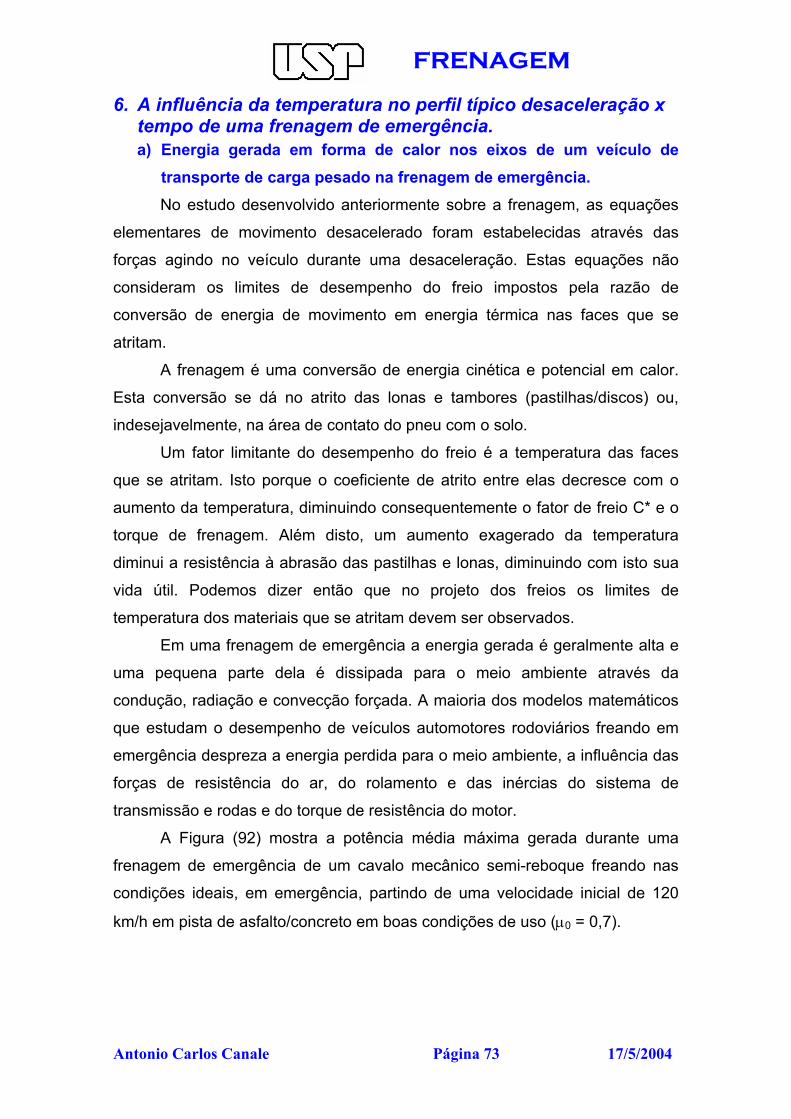
A Figura (94) mostra a variação da temperatura do eixo dianteiro que é o
mais solicitado na frenagem (balanceamento: 60% no eixo dianteiro e 40% no
eixo traseiro). A Figura (94) mostra também a variação teórica da temperatura
com a velocidade inicial e os valores finais obtidos em teste de pista. A Figura
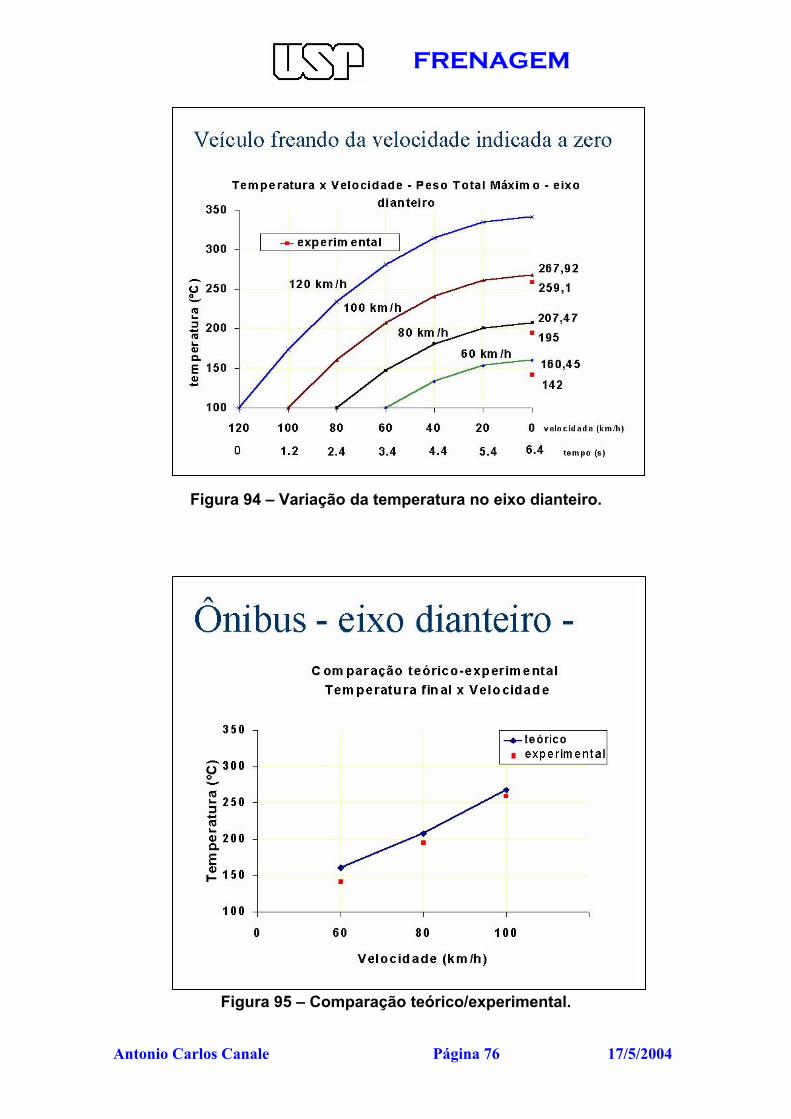
(95) resume num gráfico esta comparação teórico/experimental.
FRENAGEM
Antonio Carlos Canale Página 76 17/5/2004
Figura 94 – Variação da temperatura no eixo dianteiro.
Figura 95 – Comparação teórico/experimental.

FRENAGEM
Antonio Carlos Canale Página 77 17/5/2004
Analisando a Figura (95) podemos concluir que os dados obtidos na
pista são próximos aos teóricos, o que indica que a hipótese de que o sistema
praticamente não perde calor para o meio ambiente é válida.
A Figura (94) mostra também que a temperatura do tambor chegaria a
valores próximos de 350 °C quando a velocidade inicial fosse de 120 km/h.
A Figura (96) e a Figura (97) mostram respectivamente a variação da
temperatura nos freios traseiro e dianteiro com o ônibus vazio (peso em ordem
de marcha).
c) A relação temperatura x fator de freio.
A Figura (98) mostra uma variação típica do fator de freio com a variação
da temperatura durante a frenagem de emergência. O fator de freio C*
decresce com o aumento da temperatura principalmente pela diminuição do
coeficiente de atrito entre as lonas e o tambor.
Figura 96 – Variação da temperatura no eixo traseiro.

FRENAGEM
Antonio Carlos Canale Página 78 17/5/2004
Os pontos marcados na figura (98) foram obtidos experimentalmente em
dinamômetro. A função interpoladora y será usada a seguir para se obter o
desempenho durante a frenagem de emergência.
Figura 97 – Variação da temperatura no eixo dianteiro – vazio.
Figura 98 – Variação do fator de freio com a temperatura.

FRENAGEM
Antonio Carlos Canale Página 79 17/5/2004
d) Variação na desaceleração e forças durante frenagem de emergência.
O programa computacional simula a frenagem do veículo considerando
a variação de temperatura em cada eixo segundo a função interpoladora y. As
forças de frenagem em cada eixo podem ser obtidas durante a frenagem e a
desaceleração do veículo avaliada teoricamente também durante a frenagem.
A Figura (99) mostra a desaceleração do veículo ao longo do tempo,
freando de uma velocidade inicial de 120 km/h até a parada total, com
pressões constantes, sem escorregamentos de rodas dos seus eixos e na
condição de peso total máximo.
Note que a desaceleração vai diminuindo ao longo do tempo devido à
diminuição do fator de freio C*, isto devido ao aumento da temperatura. Os
equipamentos utilizados em testes de pista podem mostrar esta variação na
prática ou apenas registrar o valor médio.
Figura 99 – Desaceleração do ônibus considerando os efeitos da temperatura nos freios.
FRENAGEM
Antonio Carlos Canale Página 80 17/5/2004
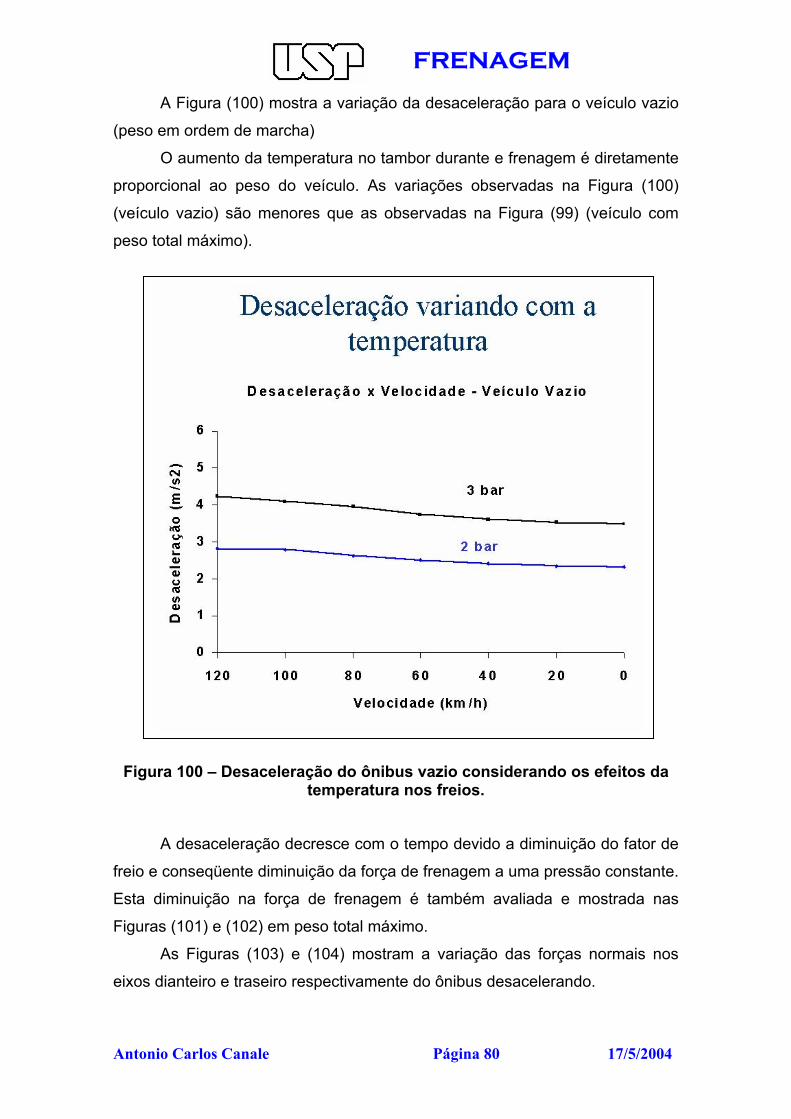
A Figura (100) mostra a variação da desaceleração para o veículo vazio
(peso em ordem de marcha)
O aumento da temperatura no tambor durante e frenagem é diretamente
proporcional ao peso do veículo. As variações observadas na Figura (100)
(veículo vazio) são menores que as observadas na Figura (99) (veículo com
peso total máximo).
Figura 100 – Desaceleração do ônibus vazio considerando os efeitos da temperatura nos freios.
A desaceleração decresce com o tempo devido a diminuição do fator de
freio e conseqüente diminuição da força de frenagem a uma pressão constante.
Esta diminuição na força de frenagem é também avaliada e mostrada nas
Figuras (101) e (102) em peso total máximo.
As Figuras (103) e (104) mostram a variação das forças normais nos
eixos dianteiro e traseiro respectivamente do ônibus desacelerando.

FRENAGEM
Antonio Carlos Canale Página 81 17/5/2004
Figura 101 – Variação da força de frenagem com a velocidade – eixo dianteiro – peso total máximo.
Figura 102 - Variação da força de frenagem com a velocidade – eixo traseiro – peso total máximo.

FRENAGEM
Antonio Carlos Canale Página 82 17/5/2004
Figura 103 – Forças normais variando com a temperatura – eixo dianteiro – peso total máximo
Figura 104 – Forças normais variando com a temperatura – eixo traseiro – peso total máximo.

FRENAGEM
Antonio Carlos Canale Página 83 17/5/2004
O desempenho teórico na frenagem do ônibus freando de 60 km/h a
zero foi obtido e comparado com resultados obtidos em teste de pista. A Figura
(105) resume estes resultados. Podemos observar que os resultados previstos
matematicamente estão próximos dos obtidos experimentalmente o que prova
que com modelos relativamente simples podemos prever o desempenho do
veículo na pista, facilitando a ação do projetista e diminuindo os ensaios de
pista, os quais são dispendiosos em tempo e em custo financeiro.
Figura 105 – Comparação teórico/experimental dos resultados obtidos. A Figura (105) mostra uma boa relação entre pressão x desaceleração,
próxima de 1. Estes resultados foram obtidos para o veículo carregado em
peso total máximo. Esta relação deve ser verificada para o veículo vazio e, em
parte, pode ser verificada pela demanda de aderência nos eixos como função
da pressão. Os gráficos da Figura (106) mostram esta demanda de aderência.

FRENAGEM
Antonio Carlos Canale Página 84 17/5/2004
Figura 106 – Demanda de aderência nos eixos para o ônibus freando vazio e em peso total máximo (ptm).
Os gráficos da Figura (106) mostram que o eixo dianteiro deverá
escorregar antes que o traseiro e que, para o veículo em peso total máximo, as
rodas do eixo dianteiro escorregarão com a pressão de 7 bar numa pista com
coeficiente de aderência disponível de 0,8. As rodas dianteiras do veículo vazio
escorregarão com 4 bar nas mesmas condições da pista.

FRENAGEM
Antonio Carlos Canale Página 85 17/5/2004
7. Frenagem de emergência - Massa mínima nos tambores e discos para absorver os efeitos térmicos.
Como já vimos neste texto, a temperatura do tambor ou disco aumenta
durante a frenagem. Mesmo dentro da faixa de uso normal dos pares
pastilha/disco ou tambor/lona, existe normalmente uma queda no desempenho
do sistema de freios. Quando a temperatura ultrapassa esta faixa normal de
uso, o desempenho pode cair drasticamente. O motorista pode não conseguir
mais manter a desaceleração do início do processo de frenagem de
emergência. A temperatura excessiva no par que se atrita pode reduzir
drasticamente o C* e pode danificar temporariamente ou permanentemente as
lonas/pastilhas. Observa-se também em testes de pista que temperaturas
elevadas, acima das indicadas para os materiais de atrito, produzem um
desgaste excessivo das lonas/pastilhas. O sistema de freio deve então ter uma
capacidade térmica de absorver a energia gerada durante uma frenagem de
emergência com o veículo em peso total máximo e na sua velocidade limite
sem ultrapassar a temperatura limite de projeto dos elementos que se atritam.
A capacidade de absorver energia com um gradiente de temperatura menor é
conseguido aumentando-se a massa dos tambores/discos do sistema de freio.
Quanto maior a massa que absorve a energia cinética, menor será a
temperatura final. Isto pode ser observado através da equação (5.71 b) de
(Canale 1989). Wdr é a massa do anel que está em contato íntimo com as
lonas ou a massa do aro do disco que está em contato íntimo com as pastilhas.
Quanto maior Wdr, menor a variação da temperatura e menor a temperatura
final da frenagem de emergência. Por outro lado, tambores com espessura
excessiva acrescentam peso e inércia na aceleração e desaceleração do
veículo, fatores não desejáveis. O projetista de freios deve então proporcionar
massa suficiente aos tambores, dependendo do peso total máximo, da
velocidade máxima e das características físicas dos materiais que se atritam,
mas que não aumentem desnecessariamente o peso do veículo e as inércias
dos elementos rotativos do sistema de freios.
A Figura (107) mostra a variação da espessura da parede do tambor de
um cavalo semi-reboque, freando de 100 km/h a zero, numa pista com µ0 = 0,7,
como uma função do peso combinado.

FRENAGEM
Antonio Carlos Canale Página 86 17/5/2004
Figura 107 – Espessura necessária para a parede do tambor. Veículo
freando de 100 km/h a zero.
Figura 108 - Espessura necessária para a parede do tambor. Veículo
freando de 120 km/h a zero.
ESPESSURA PAREDE DO TAMBOR (cm) (24x30-30x30x30) - variação temperatura de 200 graus Célsius - largura lona 18
cm
00,20,40,60,8
11,21,41,61,8
14,8 17,6 20,3 23,1 25,8 28,6 31,4 34,1 36,9 39,6PESO COMBINADO (kgf X 1000)
ESPE
SSU
RA
PA
RED
E TA
MB
OR
[cm
]
espess.eixf espess.eixr espess.eixc
ESPESSURA PAREDE DO TAMBOR (cm) (24x30-30x30x30) - variação temperatura de 200 graus Célsius - largura lona 18
cm
0
0,2
0,4
0,6
0,8
1
1,2
1,4
14,8 17,6 20,3 23,1 25,8 28,6 31,4 34,1 36,9 39,6PESO COMBINADO (kgf X 1000)
ESPE
SSU
RA
PA
RED
E TA
MB
OR
[cm
]
espess.eixf espess.eixr espess.eixc

FRENAGEM
Antonio Carlos Canale Página 87 17/5/2004
8. Controle da velocidade (descida de serra)(1).
Outra função de vital importância para o sistema de freios é o controle da
velocidade em trânsito e em descidas longas, principalmente em veículos
pesados de transporte de carga em peso total máximo. A energia gerada
quando o veículo desce uma rampa em uma velocidade deve ser transformada
em calor nos freios ou em outros sistemas para o controle da velocidade. A
potência instantânea gerada é a variação da energia de potencial e cinética
com o tempo em cada instante. Esta energia se dissipada integralmente nos
freios poderá levá-lo a uma saturação térmica com a perda de desempenho.
Dependendo principalmente da velocidade e da marcha escolhida para a
descida da serra, a temperatura resultante nos freios poderá ser excessiva. A
temperatura elevada provoca desgastes acentuados do sistema de freios e a
queda do coeficiente de atrito entre as guarnições e discos/tambores do
sistema de freio. Esta queda no coeficiente de atrito faz com que o motorista
tenha que acionar mais ainda o pedal do freio para manter a velocidade. Se
com o acionamento total do pedal o motorista não puder mais controlar a
velocidade do veículo, o sistema estará numa situação instável onde um
aumento na velocidade de descida gera mais energia que aumenta mais ainda
a temperatura no freio que reduz mais ainda o coeficiente de atrito que reduz a
força de frenagem e provoca novo aumento de temperatura. Um acidente é
eminente nestas circunstâncias. O motorista deve então escolher uma marcha
e velocidade de descida adequadas ao sistema de freios do veículo para
descer a rampa com segurança, mantendo as temperaturas dos freios dentro
de valores razoáveis permitindo ainda uma frenagem de emergência, se
necessário, sem perda significativa de eficiência. Outros dispositivos podem ser
utilizados no veículo aumentando o freio motor. Estes dispositivos podem
diminuir a quantidade de combustível ou aumentar a perda de carga dos gases
de escape. Outros dispositivos geram torque de frenagem através de campos
eletromagnéticos ou através da viscosidade de fluidos como o óleo. A função
básica destes dispositivos é dissipar parte da energia gerada quando o veículo
desce a rampa aliviando o trabalho principalmente dos freios. Os freios ficam

FRENAGEM
Antonio Carlos Canale Página 88 17/5/2004
com isto menos utilizado e em temperaturas menores, reduzindo desgaste e
aumentando a segurança.
Veículos com carga acima do peso total máximo indicado pelo fabricante
terão certamente problemas com a eficiência do sistema de freios na frenagem
de emergência e na descida de serra. Um dos principais fatores no projeto do
sistema de freios de um veículo é o seu peso total máximo permitido. Violações
do peso total máximo implicam em responsabilidade civil e criminal, da
empresa dona do veículo e do engenheiro responsável, em possíveis acidentes
que venham a ocorrer. O sobrepeso do veículo aumenta drasticamente a taxa
de deterioração da pista com o tempo, destruindo normalmente um bem
público, caracterizando ato irresponsável e anti-social.
Os freios à disco apresentam uma menor variação no seu desempenho
pelos efeitos térmicos comparados com os freios à tambor. Estudos estão
sendo realizados no momento pelas montadoras de veículos no Brasil,
principalmente os de veículos de transporte de carga pesados, para a troca do
sistema de freios à tambor para o à disco. Os freios à disco proporcionam uma
estabilidade maior na geração das forças de frenagem o que se traduz no
veículo em melhor estabilidade e dirigibilidade durante a frenagem.

FRENAGEM
Antonio Carlos Canale Página 89 17/5/2004
Figura 109 – Um gráfico típico do torque de frenagem e a potência dissipada no freio motor de um veículo como uma função da sua
velocidade
A Figura (109) mostra que o torque de frenagem no veículo proveniente
do motor usado como “freio motor” depende da marcha engrenada e da
velocidade do veículo. O motorista deve escolher a marcha para descer a
rampa numa velocidade adequada ao desempenho térmico do sistema de
freios instalado no veículo.
A Figura (110) mostra a potência que o sistema de freio de um veículo
pode perder para o meio ambiente em forma de calor como uma função da
velocidade do veículo. A eficiência do sistema de freio em perder calor para o
meio ambiente depende em muito das formas aerodinâmicas do veículo, da
posição e eficiência dos condutos de ar que coletam e direcionam o ar frio para
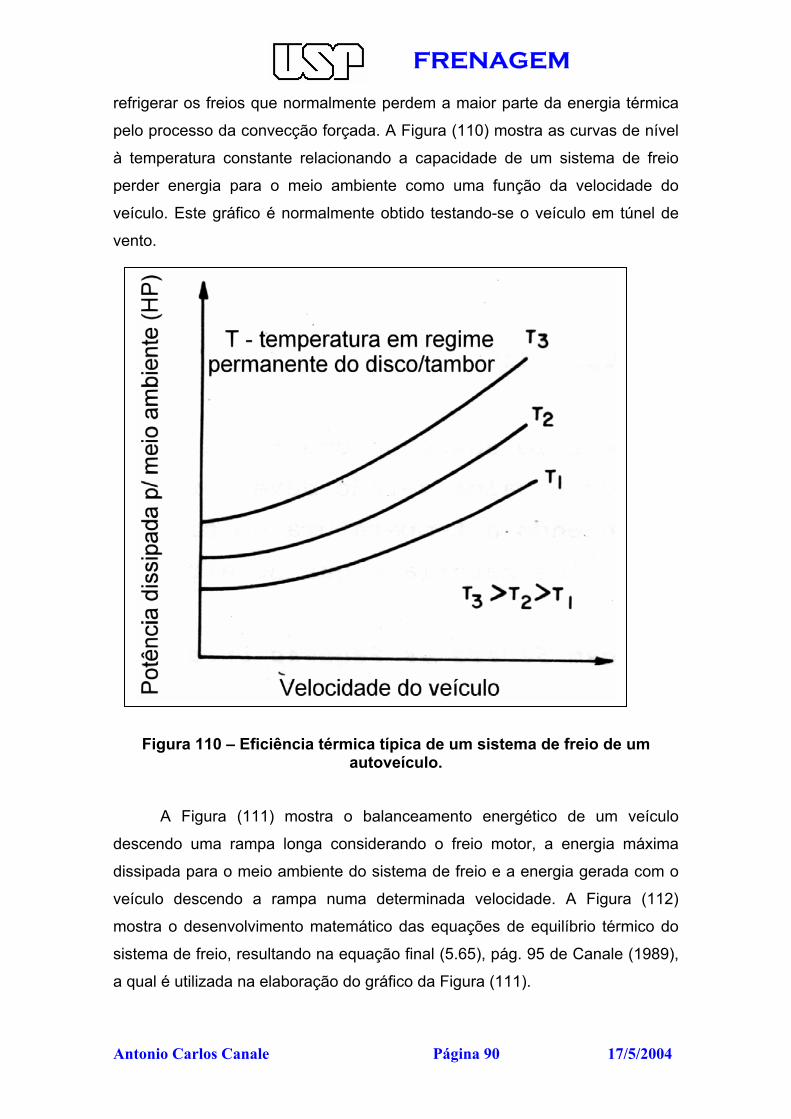
FRENAGEM
Antonio Carlos Canale Página 90 17/5/2004
refrigerar os freios que normalmente perdem a maior parte da energia térmica
pelo processo da convecção forçada. A Figura (110) mostra as curvas de nível
à temperatura constante relacionando a capacidade de um sistema de freio
perder energia para o meio ambiente como uma função da velocidade do
veículo. Este gráfico é normalmente obtido testando-se o veículo em túnel de
vento.
Figura 110 – Eficiência térmica típica de um sistema de freio de um autoveículo.
A Figura (111) mostra o balanceamento energético de um veículo
descendo uma rampa longa considerando o freio motor, a energia máxima
dissipada para o meio ambiente do sistema de freio e a energia gerada com o
veículo descendo a rampa numa determinada velocidade. A Figura (112)
mostra o desenvolvimento matemático das equações de equilíbrio térmico do
sistema de freio, resultando na equação final (5.65), pág. 95 de Canale (1989),
a qual é utilizada na elaboração do gráfico da Figura (111).

FRENAGEM
Antonio Carlos Canale Página 91 17/5/2004
Figura 111 – Balanceamento térmico típico de um sistema de freio de um autoveículo.
Figura 112 – Equações de equilíbrio térmico.
FRENAGEM
Antonio Carlos Canale Página 92 17/5/2004
Referências Bibliográficas
CANALE, Antônio Carlos. Automobilística: dinâmica e desempenho. São Paulo: Érica, 126p, 1989
CANALE, A. C.; RUFINO, R. T. (1993). Study of the dynamic weight on the axle and wheels of automobile using the static equilibrium or center of gravity range of the vehicle. In: INTERNATIONAL MOBILITY TECHNOLOGY CONFERENCE AND EXHIBIT, 2., São Paulo, Brasil, SAE. / SAE technical paper series 931648 E ou P/
CANALE, A. C.; RUFFINO, R. T. (1992). Estudo do desempenho de veículos rodoviários utilizando a técnica do balanceamento estático. In: CONGRESSO IBERO LATINO-AMERICANO SOBRE MÉTODOS COMPUTACIONAIS PARA A ENGENHARIA, 13., Porto Alegre, 1992. Anais. Rio Grande do Sul, CILAMCE. V.2, p. 401-10
CANALE, A. C.; RUFINO, R. T. (1992). A study of the braking performance of road vehicles using the "static equilibrium" or "centre of gravity range" technique. In: INTERNATIONAL MOBILITY TECHNOLOGY CONFERENCE AND EXHIBIT, 1., São Paulo, Brasil, SAE. /SAE technical paper series 921438 E ou P/
ADAS C. A.; FONSECA B. J.; FERNANDES D. F. ; CANALE, A. C. (1995). A study of the brakingperformance of heavy trucks using the "static equilibrium" or "centre of gravity range" technique. In: INTERNATIONAL MOBILITY TECHNOLOGY CONFERENTE AND EXHIBIT, 4., São Paulo, Brasil, SAE. /SAE technical paper series 952215 E ou P/
FERNANDES, D. L. G.; CANALE, A. C.; PERSEGUIM, O. T. (1995). Estudo do desempenho na freagem de veículos pesados usando a técnica do "balanceamento estático" ou "passeio do centro de gravidade". In: CONGRESSO BRASILEIRO DE ENGENHARIA MECÂNICA, 13., & CONGRESSO IBERO AMERICANO DE ENGENHARIA MECÂNICA, 2., Belo Horizonte, 1995. Anais em CD ROM. Minas Gerais, COBEM & CIDIM, 4.p
FERNANDES, D. L. G.; CANALE, A. C.; PERSEGUIM, O. T. (1995). Uma descrição de um sistema computacional para o estudo do desempenho na freagem de veículos pesados. In: CONGRESSO BRASILEIRO DE ENGENHARIA MECÂNICA, 13., & CONGRESSO IBERO AMERICANO DE ENGENHARIA MECÂNICA, 2., Belo Horizonte, 1995. Anais em CD ROM. Minas Gerais, COBEM & CIDIM, 4.p
CANALE, A. C.; FERNANDES, D. L. G.; PERSEGUIM, O. T. (1995). Obtenção das forças que ocorrem nos eixos e na suspensão de um veículo combinado articulado. In: CONGRESSO BRASILEIRO DE ENGENHARIA MECÂNICA, 13., & CONGRESSO IBERO AMERICANO DE ENGENHARIA MECÂNICA, 2., Belo Horizonte, 1995. Anais em CD ROM. Minas Gerais, COBEM & CIDIM, 4.p

FRENAGEM
Antonio Carlos Canale Página 93 17/5/2004
ADAS, C. A.; FONSECA, B. J.; FERNANDES, D. F.; CANALE, A. C. (1995). A study of the influence of the brake force distribution on the directional stability of heavy vehicles during the braking process. In: INTERNATIONAL MOBILITY TECHNOLOGY CONFERENCE AND EXHIBIT, 4, São Paulo, Brasil, SAE. /SAE technical paper series 952213 E ou P/
CANALE, A. C.; FONSECA, B. J.; ADAS, C. A.; FERNANDES, D. L. G. (1995). A description of a computer system for the study of brake performance of heavy trucks. In: INTERNATIONAL MOBILITY TECHNOLOGY CONFERENCE AND EXHIBIT, 4, São Paulo, Brasil, SAE. /SAE technical paper series 952214 E ou P/
FERNANDES, D. L. G.; CANALE, A. C.; ADAS, C. A. (1997). Desempenho de veículos pesados na freagem considerando os requisitos da regulamentação ECE - R13 ( Economic Commision for Europe - Regulation nr. 13). In: CONGRESSO IBERO AMERICANO DE ENGENHARIA MECÂNICA, 3., Havana, Cuba, 1997. Anais em CD ROM. Havana, CIDIM.
FARIA, S. C.; CANALE, A. C. (1997). Estudo termodinâmico do sistema de freios. In: CONGRESSO IBERO AMERICANO DE ENGENHARIA MECÂNICA, 3., Havana, Cuba, 1997. Anais em CD ROM. Havana, Cuba. CIDIM.
FERNANDES, D. L. G.; CANALE, A. C.; ADAS, C. A. (1997). Performance, distribuition of braking and compatibility of heavy vehicles during the braking process including ECE-13 requirements. In: INTERNATIONAL MOBILITY TECHNOLOGY CONFERENCE AND EXHIBIT, 6., São Paulo, Brasil, 1997, SAE. /SAE technical paper series 973045 E ou P/
LOMBRILLER, S. F.; CANALE, A. C.;. (1997). The effect of the temperature on the emergency braking of road vehicles. In: INTERNATIONAL MOBILITY TECHNOLOGY CONFERENCE AND EXHIBIT, 6., São Paulo, Brasil, 1997, SAE. /SAE technical paper series 973054 E ou P/
FERNANDES, D. L. G.; CANALE, A. C.; FONSECA, B. J.; ADAS, C. A. (1997). Performance and directional stability of combination vehicles during the braking process under any operation condition. In: INTERNATIONAL SYMPOSIUM ON AUTOMOTIVE TECHNOLOGY AND AUTOMATION, 30., Florence, Italy, 1997. Anais. Florence, ISATA, ****
FERNANDES, D. L. G.; CANALE, A. C.; ADAS, C. A. (1997). Desempenho de veículos pesados na freagem considerando os requisitos da regulamentação ECE-R13. In: CONGRESSO BRASILEIRO DE ENGENHARIA MECÂNICA, 14.,Baurú, 1997. Anais, São Paulo, Brasil, COBEM. ****
CANALE, A C. Estudo de desempenho de autoveículos rodoviários considerando o passeio do centro de gravidade e restrições impostas pelo binômio pneumático x pavimento, Tese de Doutorado apresentada à Escola de Engenharia de São Carlos, Universidade de São Paulo, 1991.

FRENAGEM
Antonio Carlos Canale Página 94 17/5/2004
GILLESPIE, T. D. Fundamentals of Vehicle Dynamics, SAE Order No. R114, 1992
LIMPERT, R. Brake design and safety, SAE Order No. R-120, 1992.
LOBAS, L.G. Controllability, stabilizability, and observability of the motion wheeled vehicles. Soviet Applied Mechanics, v.23, n.4, p.395-403, 1987.
ROSKAN, J. Flight dynamics of rigid and elastic airplanes. Lawrence, Kansas, 1972. Par. II, paginação irregular.
MILLIKEN, W. F.; MILLIKEN, D. L. Race car vehicle dynamics, SAE Order No. R-146, 1995.
Reimpell, J. & Stoll, H. The Automotive Chassis: Engineering principles. SAE 1996
Dixon, J. C. Tires, Suspension and Handling. SAE order No. R-168.

FRENAGEM
Antonio Carlos Canale Página 95 17/5/2004
Desempenho na frenagem. ______________________________________________ 1
1. Introdução: Engenharia da Mobilidade ↔ Engenharia de freios _____________ 1 Definições de “estabilidade”(3) e “dirigibilidade ou manobrabilidade”(4): __________________2
2. “AUTOVEÍCULOS ↔ VEÍCULO DE TRANSPORTE DE CARGAS”:_______ 3 3. Dinâmica do pneu x pavimento. ________________________________________ 14 4. Geração das forças de frenagem num autoveículo. ________________________ 25
a) Freio a disco e a tambor.___________________________________________________25 b) Fator de freio ____________________________________________________________29 c) Influência do fator de freio na estabilidade durante a frenagem. Geração assimétrica das forças de frenagem nas rodas de um veículo. ________________________________________30 d) Balanceamento das forças de frenagem nos eixos do veículo. Balanceamento ideal x balanceamento real._____________________________________________________________31 e) Eficiência do sistema de freios ________________________________________________32 f) Movimentos instáveis na frenagem. Jackknife para veículos combinados cavalo semi-reboque_______________________________________________________________________34
5. Dinâmica da frenagem _______________________________________________ 36 a) Perfil típico desaceleração x tempo de um autoveículo numa frenagem de emergência.36
6. A influência da temperatura no perfil típico desaceleração x tempo de uma frenagem de emergência. ___________________________________________________ 73 7. Frenagem de emergência - Massa mínima nos tambores e discos para absorver os efeitos térmicos.___________________________________________________________ 85 8. Controle da velocidade (descida de serra)(1).______________________________ 87
Referências Bibliográficas _____________________________________________ 92
Figura 1 – A Engenharia da frenagem _________________________________________________1 Figura 2 – Sistema de coordenadas SAE j670e (Vehicle dynamics terminology )[Gillespie 1992]___________________________________________________________________________________3 Figura 3 – Massa concentrada no centro de massa e forças e torques que atuam num veículo desacelerado. ______________________________________________________________________4 Figura 4 – Modelagem mais completa com as massas suspensas e não suspensas _________6 Figura 5 – Determinação do C.G. na longitudinal.________________________________________7 Figura 6 – Determinação da posição do C.G. na transversal.______________________________7 Figura 7 – Posicionamento do C.G. na altura ___________________________________________8 Figura 8 – Posição do C.G. do veículo carregado. _______________________________________9 Figura 9 – Passeio do C.G. na longitudinal e na altura com relação ao solo.[Canale, 1991]___12 Figura 10 – Desac. do veíc. função passeio do C.G.[Canale,1991]________________________13 Figura 11 – Espaço necessário para parar o Kadett de forma segura de 96 km/h a zero numa pista com coef. de aderência de 0,9[Canale, 1991] _____________________________________13 Figura 12 – Roda rígida x pavimento rígido.[Canale, 1989]_______________________________14 Figura 13 – Pneu em contato com o pavimento.[Canale, 1989] ___________________________15 Figura 14 – Definição do coeficiente de adesão.[Canale, 1989]___________________________16 Figura 15 – Valores de referência para do coeficiente de adesão máximo e coeficiente de atrito no escorregamento. [Canale, 1989]___________________________________________________16 Figura 16 – Pneu gerando força lateral. [Canale, 1989]__________________________________17 Figura 17 – Pneu numa curva gerando força lateral. [Canale, 1989]_______________________18 Figura 18 – Força lateral x ângulo de escorregamento (cornering stiffness) [Milliken, 1995]. _19 Figura 19 – Força lateral para várias forças normais [Milliken,1995] _______________________20 Figura 20 – Coeficiente de adesão lateral [MILLIKEN, 1995]._____________________________21 Figura 21 – Cavalo mecânico semi-reboque na curva. Solicitação lateral nos pneus. ________22 ________________________________ Figura 22 – Elipse de aderência típica de um pneu__________________________________________________________________________________23 Figura 23 – Ângulos que a roda faz com o pavimento`[Canale 1989]. _____________________24

FRENAGEM
Antonio Carlos Canale Página 96 17/5/2004
Figura 24 – Desenho de um freio à disco. [Limpert, 1992] ______________________________25 Figura 25 – Foto de um freio à disco de caminhão. [Limpert,1992] ________________________26 Figura 26 - Alguns tipos de freios à tambor. [Limpert, 1992]______________________________26 Figura 27 –Foto de um freio tipo cames [Limpert,1992]__________________________________27 Figura 28 – Forças e torques que atuam no veículo desacelerando. [Canale, 1989] _________28 Figura 29 – Fator de freio C*, relação Br/W e FED/ET_____________________________________29 Figura 30 - Fator de freio para diversos tipos de freios.__________________________________30 Figura 31 – Distribuição das forças de frenagem real e ideal. ____________________________31 Figura 32 – Distribuição das forças normais e distribuição ideal das forças de frenagem para o veículo vazio ______________________________________________________________________33 Figura 33 - Distribuição das forças normais e distribuição ideal das forças de frenagem para o veículo em peso total máximo. _______________________________________________________33 Figura 34- Definição de eficiência do sistema de freios de um veículo. ____________________34 Figura 35 – Relação eficiência com número de escorregamentos e segurança veicular. _____35 Figura 36 – Perfil desaceleração por tempo. ___________________________________________36 Figura 37 – Tempo de resposta de um sistema de freios de um ônibus.___________________38 Figura 38 – Posição do C.G. do Kadett em peso em ordem de marcha. ___________________39 Figura 39 – Peso dinâmico. _________________________________________________________40 Figura 40 – Peso dinâmico com o veículo freando a 9,44 m/s2. ___________________________40 Figura 41 – Distribuição ideal das forças de frenagem. __________________________________41 Figura 42 - Peso dinâmico com o veículo freando a 7,59 m/s2 ____________________________41 Figura 43 - Peso dinâmico com o veículo freando a 3,88 m/s2 ____________________________42 Figura 44 – Distribuição ideal e real com o veículo freando a 9,44 m/s2.___________________42 Figura 45 – Distribuição ideal e real 80%/20% _________________________________________43 Figura 46 – Desaceleração com 85%/15% ____________________________________________43 Figura 47 - Desaceleração com 85%/15% - adesão 0,8 _________________________________44 Figura 48 - Desaceleração com 85%/15% - adesão 0,4 _________________________________44 Figura 49 – Coeficiente de adesão utilizado – aderência máxima 1,0 – distribuição forças de frenagem 85%/15% . _______________________________________________________________45 Figura 50 - Coeficiente de adesão utilizado – aderência máxima 0,8 – distribuição forças frenagem 85%/15% . _______________________________________________________________45 Figura 51 - Coeficiente de adesão utilizado – aderência máxima 0,4 – distribuição forças frenagem 85%/15%.. _______________________________________________________________46 Figura 52 – Espaço percorrido – velocidade inicial 96 km/h – aderência máxima 0,9.... ______46 Figura 53 - Espaço percorrido – velocidade inicial 129 km/h – aderência máxima 0,8. _______47 Figura 54 – Desaceleração com aderência de 1,0 e distribuição forças de frenagem 80%/20%..__________________________________________________________________________________47 Figura 55 – Passeio do C.G. na longitudinal do semi-reboque ____________________________48 Figura 56 – Passeio do C.G. na vertical do semi-reboque. _______________________________48 Figura 57 – Coeficiente de adesão utilizado com o veículo vazio _________________________49 Figura 58 – Coeficiente de adesão utilizado com o veículo em peso total máximo. __________49 Figura 59 – Mapa da distribuição das forças normais no eixo dianteiro.____________________50 Figura 60 – Mapa da distribuição das forças normais no eixo traseiro do cavalo.____________50 Figura 61 – Mapa da distribuição das normais nos eixos do semi-reboque _________________51 Figura 62 – Mapa da distância de frenagem ___________________________________________51 Figura 63 – Mapa da eficiência da frenagem.__________________________________________52 Figura 64 – Mapa da desaceleração média. ___________________________________________52 Figura 65 – Mapa da pressão de escorregamento.______________________________________53 Figura 66 – Mapa dos eixos que travam. ______________________________________________53 Figura 67 – Mapa da aderência utilizada no eixo dianteiro._______________________________54 Figura 68 – Mapa da aderência utilizada no eixo traseiro do cavalo._______________________54 Figura 69 – Mapa da aderência utilizada nos eixos do semi-reboque. _____________________55 Figura 70 – Mapa da desac. máxima. _________________________________________________55 Figura 71 – O gráfico mostra o coeficiente de adesão utilizado nos dois eixos do cavalo mecânico na distribuição ideal das forças de frenagem__________________________________57 Figura 72 – Coeficientes de adesão utilizados nos eixos do cavalo mecânico com cilindros de 24/24_____________________________________________________________________________57 Figura 73 – Desaceleração do veículo como uma função da pressão da linha pneumática de serviço.___________________________________________________________________________58

FRENAGEM
Antonio Carlos Canale Página 97 17/5/2004
Figura 74 – Desenho da válvula ALB e sua instalação no eixo traseiro do cavalo mecânico. A válvula mede a deformação e controla a pressão no eixo traseiro do cavalo mecânico. ______59 Figura 75 – Curvas características da válvula ALB. _____________________________________60 Figura 76 – Ângulo do braço da válvula ALB instalada o cavalo mecânico desacelerando. ___61 Figura 77 – As Figuras mostram a variação do coeficiente de adesão utilizado e a desaceleração correspondente pela pressão na linha de serviço. _________________________62 Figura 78 – Pressão nos cilindros dos freios dianteiro e traseiro do cavalo mecânico. _______63 Figura 79 – Força de frenagem nos eixos dianteiro e traseiro do cavalo mecânico __________63 Figura 80 Variação da força normal no eixo dianteiro e no eixo traseiro do cavalo mecânico com a variação da pressão da linha de serviço. ____________________________________________64 Figura 81 – Compatibilidade do cavalo mecânico segundo ECE – 13. Veículo com ALB ¼ e 1/8.__________________________________________________________________________________65 Figura 82 – Demanda do coeficiente de aderência nos eixos do cavalo mecânico com a válvula ALB 1/8. __________________________________________________________________________66 Figura 83 – Desaceleração do cavalo mecânico com a válvula ALB 1/8 com a variação da pressão. __________________________________________________________________________67 Figura 84 – Semi-reboque com a suspensão por balança. _______________________________67 Figura 85 – Demanda de aderência do veículo combinado sem válvula. ___________________68 Figura 86 – Desaceleração do veículo combinado sem válvula. __________________________68 Figura 87 – Demanda de aderência do veículo combinado vazio freando sem a válvula ALB._70 Figura 88 – Desaceleração do veículo combinado vazio freando sem a válvula ALB. ________70 Figura 89 – Demanda de aderência do veículo combinado freando com a válvula ALB.______71 Figura 90 – Desaceleração do veículo combinado freando com a válvula ALB. _____________71 Figura 91 – Compatibilidade do semi-reboque segundo ECE-13. _________________________72 Figura 92 – Potência média gerada na frenagem sem perda de calor para o meio ambiente. _74 Figura 93 – Temperatura do par lona/tambor do ônibus freando no eixo traseiro ____________75 Figura 94 – Variação da temperatura no eixo dianteiro.__________________________________76 Figura 95 – Comparação teórico/experimental._________________________________________76 Figura 96 – Variação da temperatura no eixo traseiro.___________________________________77 Figura 97 – Variação da temperatura no eixo dianteiro – vazio.___________________________78 Figura 98 – Variação do fator de freio com a temperatura. _______________________________78 Figura 99 – Desaceleração do ônibus considerando os efeitos da temperatura nos freios. ___79 Figura 100 – Desaceleração do ônibus vazio considerando os efeitos da temperatura nos freios. ____________________________________________________________________________80 Figura 101 – Variação da força de frenagem com a velocidade – eixo dianteiro – peso total máximo. __________________________________________________________________________81 Figura 102 - Variação da força de frenagem com a velocidade – eixo traseiro – peso total máximo. __________________________________________________________________________81 Figura 103 – Forças normais variando com a temperatura – eixo dianteiro – peso total máximo__________________________________________________________________________________82 Figura 104 – Forças normais variando com a temperatura – eixo traseiro – peso total máximo.__________________________________________________________________________________82 Figura 105 – Comparação teórico/experimental dos resultados obtidos. ___________________83 Figura 106 – Demanda de aderência nos eixos para o ônibus freando vazio e em peso total máximo (ptm). _____________________________________________________________________84 Figura 107 – Espessura necessária para a parede do tambor. Veículo freando de 100 km/h a zero. _____________________________________________________________________________86 Figura 108 - Espessura necessária para a parede do tambor. Veículo freando de 120 km/h a zero. _____________________________________________________________________________86 Figura 109 – Um gráfico típico do torque de frenagem e a potência dissipada no freio motor de um veículo como uma função da sua velocidade _______________________________________89 Figura 110 – Eficiência térmica típica de um sistema de freio de um autoveículo. ___________90 Figura 111 – Balanceamento térmico típico de um sistema de freio de um autoveículo. ______91 Figura 112 – Equações de equilíbrio térmico. __________________________________________91