desenvolvimento de um aparato para dar suporte … · existem desde o egito antigo, cerca de 2830...
TRANSCRIPT
Departamento de Engenharia Mecânica
DESENVOLVIMENTO DE UM APARATO PARA DAR SUPORTE AO
DESLOCAMENTO DO IDOSO COM DEFICIÊNCIA
Aluno: Luiza Silva de Souza Loureiro e José Carlos Lobo Santiago
Orientador: Djenane C. Pamplona e Hans Ingo Weber
Introdução
Locomoção consiste no ato de se mover de um lugar ao outro, independente da forma como
isso seja feito. Deambulação é a locomoção bípede ou de um pé.
Objetos que auxiliam na deambulação de pessoas com alguns transtornos, tais como bengalas,
muletas e andadores, são constantemente usados. São dispositivos de mão que ajudam a
pessoa a ficar de pé e a andar. Esses auxiliadores tem a função de aumentar a estabilidade,
aumentando a base de suporte do indivídio. A base de apoio consiste na área delimitada por
uma linha que liga o perímetro de todos os pontos de contato com o solo. Para uma pessoa ser
estável em pé ou andando, a projeção de seu centro de gravidade deve situar-se dentro da
base. A estabilidade é aumentada quando aumenta-se tal base de apoio.
A escolha do dispositivo adequado vai de acordo com a força, a resistência e o equilíbrio do
usuário. Bengalas podem ajudar a redistribuir o peso de um membro inferior que é fraco ou
doloroso, melhora a estabilidade, aumentando a base de apoio e fornece informações táteis
sobre o solo para melhorar o equilíbrio. Andadores melhoram a estabilidade em pessoas com
fraqueza nos membros inferiores ou que sofrem de falta de equilíbrio, facilitando a mobilidade
através do aumento da base de suporte. Já as muletas são úteis para pacientes que precisam
usar os braços para propulsão e sustentação parcial de peso, e não apenas para o equilíbrio.
Entretanto o uso de muletas aumenta o gasto energético do usuário se comparado com a
marcha normal. Segundo Shoup et al., baseado em uma análise cinemática, esse aumento do
gasto energético acontece devido a variação do centro de massa do corpo do paciente, além
do impacto da muleta com o chão e a movimentação necessária de balanço do corpo e das
muletas. É função dos braços e dos ombros, portanto, absorver a energia da movimentação no
momento em que ocorre o impacto das muletas com o solo.
As muletas existentes são as não-axilares e as axilares. As não-axilares também são conhecidas
como muletas de antebraço e muletas canadenses. Essas se apoiam em torno do antebraço do
usuário. O apoio do antebraço se liga a uma barra vertical, de modo que uma parte do peso do
usuário é transferido através de suas mãos e seus antebraços para o solo. Porém, as muletas
canadenses ainda não oferecem ao usuário um equilíbrio ideal, uma vez que a distribuição de
peso nas mãos e nos antebraços levam o corpo a deslocar-se para frente.
As muletas axilares apoiam-se nas mãos e nas axilas. O apoio para as mãos é coberto com um
material almofadado para proteger a palma do utilizador. Já o apoio axilar é geralmente
coberto por um material com elevado coeficiente de fricção para diminuir o movimento abaixo
dos braços. A ponta da muleta axilar é normalmente feita de borracha para assegurar a fricção.
O paciente deve ter força, equilíbrio e coordenação suficiente para dominar o aparato, e deve
ser treinado para usá-lo corretamente. As muletas podem ser feitas de madeira, alumínio,
fibras de carbono, titânio e etc.
Usando um par de muletas o usuário pode transferir até 100% de seu peso corporal para as
mãos e axilas – esse valor varia durante a marcha. Elas oferecem ao usuário melhor suporte de
tronco do que as muletas de antebraço, além de permitir-lhes a liberação de suas mãos para
realizar suas atividades. Apesar das muletas axilares serem muito antigas, há poucas
tentantivas de aprimoramento das mesmas. São elas, por exemplo, a suspension crutch, a
rocker crutch, a spring crutch e a prosthetic foot crutch.
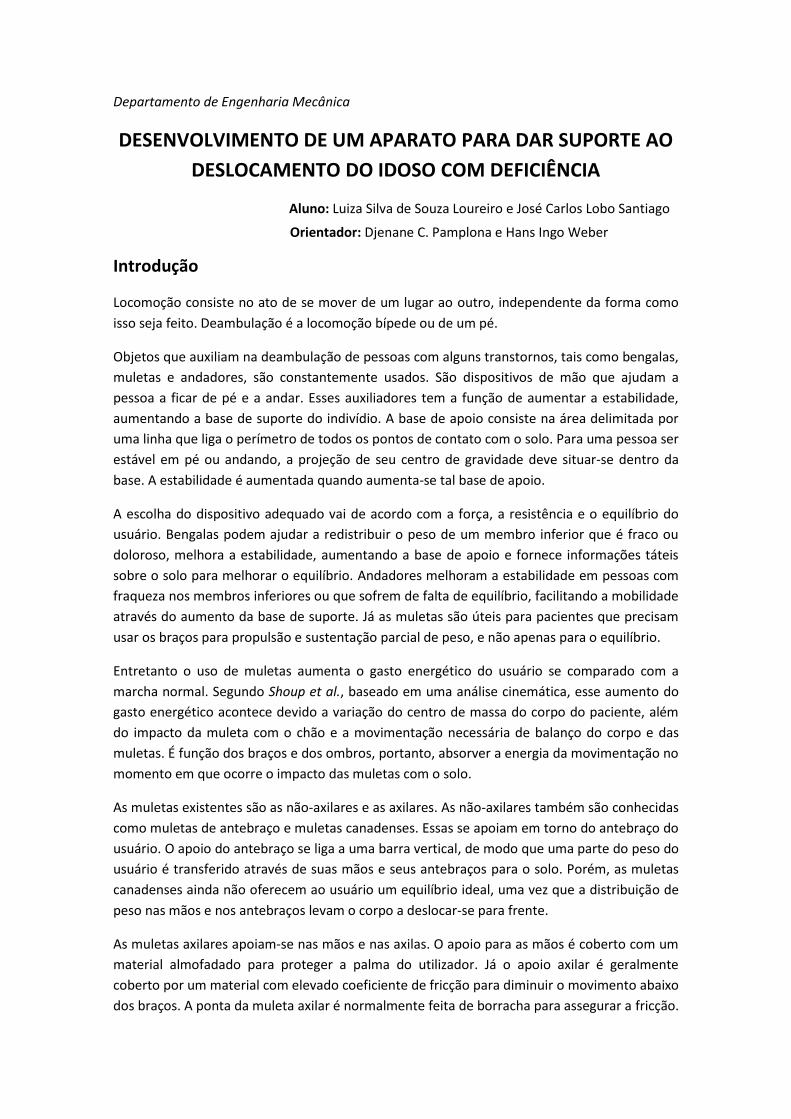
A suspension crutch (Figura 1.a) consiste em uma muleta ligada a um cinto com alças laterais
que tem como objetivo redistribuir o peso do usuário, de forma que este não é apenas
suportado pelos braços, mas também pela área perineal. Constatou-se um menor gasto
energético na locomoção e concluiu-se como desvantagem o perigo de se estar preso por alças
e a falta de estabilidade. A rocker crutch (Figura 1.b) apresenta um design mais complicado e
pesado se comparado com as demais criações. Porém, seu contato com o solo é maior devido
a uma viga curva posicionada na ponta da muleta, com a base de uma cadeira de balanço. Já a
spring crutch (Figura 1.c) possui um sistema de molas localizado no eixo da muleta. Tem como
vantagem um aumento da passada e uma maior absorção do choque obtido quando as
muletas encostam no chão. Por fim, a prosthetic foot crutch (Figura 1.d) apresenta um pé na
base, como forma de armazenar energia. Este utiliza a deformação elástica de uma mola
interna para absorver impactos e retornar a energia para o usuário.
(1.a) (1.b) (1.c) (1.d)
Figura 1. Exemplos de muletas axilares. (a) Suspension Crutch; (b) Rocker Crutch; (c) Spring Crutch; (d) Prosthetic
Foot Crutch
Segundo LeBlanc et al. a muleta axilar tem um dos menores gastos de energia, quando
comparado com outros quatro tipos de muleta acima. Bose at al. afirma que usando-se a
muleta axilar de forma incorreta, cerca de 34% do peso corporal foi suportado pelas axilas.
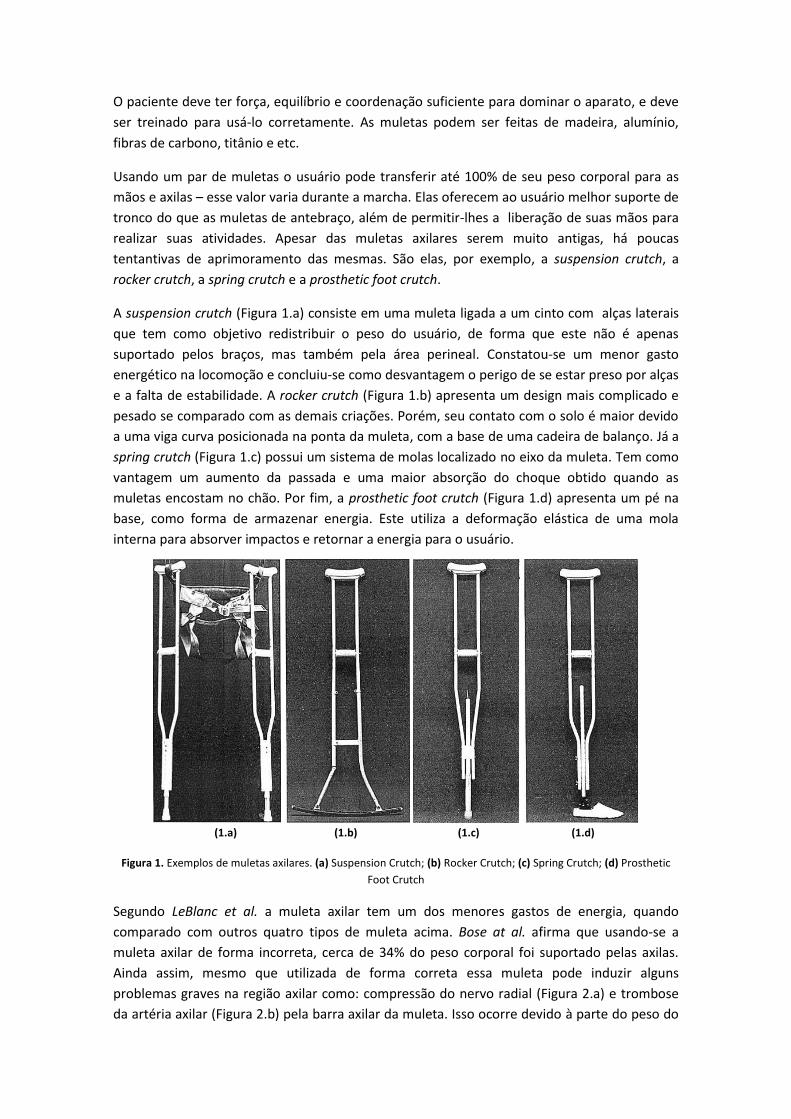
Ainda assim, mesmo que utilizada de forma correta essa muleta pode induzir alguns
problemas graves na região axilar como: compressão do nervo radial (Figura 2.a) e trombose
da artéria axilar (Figura 2.b) pela barra axilar da muleta. Isso ocorre devido à parte do peso do
corpo ser suportado, durante a caminhada, diretamente entre pela barra axilar e a parte
lateral do corpo abaixo da axila. O uso correto da muleta axilar é de extrema importância para
a saúde do paciente, pode minimizar os problemas.
(2.a) (b)
Figura 2. (a) Nervo Radial; (b) Artéria axilar
Pamplona DC et al. (2000) instrumentou-se uma muleta com extensômetros de roseta de
forma a realizar uma aquisição de dados, usando um sistema da Texas Instruments para o
portador parado e com o mesmo se deslocando. Foram identificados então esforços de torção
para os quais a muleta em questão não havia sido calculada.
Objetivo
As muletas axilares não são uma criação recente. Vê-se sua presença nos desenhos que
existem desde o Egito Antigo, cerca de 2830 a.C. (Figura 3). Elas sofrerem poucas modificações
e inovações nos últimos anos e por isso são pouco utilizadas. Os indivíduos que normalmente
as usam tem pouca força nas pernas.
Figura 3. Filhos de Echnaton com muletas, 1350 a.C. (Museu Egípcio, em Berlim)
Michael Whittle, em “Análise da Marcha”, explica que a muleta pode oferecer mais apoio do que uma bengala porque tem dois “pontos de fixação” para o corpo – a mão e a região axilar.
Assim, a muleta permite à pessoa uma maior mobilidade, tirando a tensão do membro deficiente. Elas também podem fornercer pistas sensoriais através das mãos, descarga dos membros inferiores e permitir o usuário estar na vertical e manobrar em áreas não acessíveis com uma cadeira de rodas. Tendo em vista que os maiores problemas da muleta axilar são: um esforço daninho transmitido para as regiões axilares, levando a problemas corporais; o impacto da muleta no chão, aumentando o gasto energético; e a dificuldade de mobilidade vertical; além de sua aparência pouco estética, o presente trabalho empenha-se em minimizar todas estas questões, criando uma muleta axilar que seja funcional, interaja com o usuário e também seja esteticamente agradável para quem a utiliza. Portanto, o objetivo do projeto é desenvolver um aparato inovador, personalizado, leve,
resistente e com menor gasto metabólico e energético possível. Além disso, deseja-se permitir
que usuário que faz uso desse objeto seja capaz de deslocar-se em desníveis e degraus, sentar
e levantar sozinho, com isso aumentando sua possibilidade de deslocamento vertical.
Mais do que isso, deseja-se criar um objeto extremamente pessoal – como um par de óculos –
e que cada indivíduo faça suas escolhas buscando uma melhor adequação, visando além do
conforto, a estética. Busca-se a muleta ideal para cada usuário, de forma que ele realmente
sinta que a mesma foi desenvolvida particularmente para a sua locomoção e conforto.
Metodologia
Para atender as necessidades dos usuários de muletas da melhor forma possível, projetou-se
uma muleta axilar. O projeto possui cinco frentes: inovação e personalização, saúde,
mobilidade, estrutura e conforto.
1. Inovação e personalização: Já existem modelos de bengalas e muletas de antebraço
bastante sofisticados e personalizados, como podemos observar nas figuras 4 e 5.
Porém para muletas axilares nada foi desenvolvido. A equipe de Arte e Design da PUC-
Rio, liderada pela professora Vera Damazio, é parceira e reponsável por pensar em um
objeto inovador capaz de atender a todas as necessidades do usuário de forma útil e
esteticamente agradável.
Figura 4. Bengalas personalizadas

Figura 5. Muletas de antebraço personalizadas
2. Saúde: A muleta axilar mesmo que utilizada de forma correta pode induzir alguns
problemas graves como: trombose da artéria axilar e a compressão do nervo radial
pela barra axilar da muleta. A fim de aliviar o esforço excessivo na região axilar devido
ao peso do corpo ser suportado pela barra axilar ali localizada, criou-se um aparato
auxiliar de sustentação do usuário capaz de redistribuir o peso corporal. Dessa forma,
a região perineal e os membros inferiores passam a sustentar grande parte do mesmo.
Para quantificar o alívio das tensões é preciso determinar os valores de pressão que
atuam na região axilar. Isso foi feito com o uso de 6 sensores de pressão FlexForce
com capacidade de até 11 Kg cada (Figura 6). Os dados foram aquisitados com o
sistema cDAQ na National Instruments de 3 canais. Os sensores #1, 3 e 5 esavam em
contato com o braço e os sensores #2, 4 e 6, com o corpo (Figura 7). Os testes foram
realizados em caminhadas com indivíduos sadios que tem uma das pernas
imobilizadas numa passarela de 6 metros. Cada indivíduo realizou três caminhadas de
ida e volta, com tempo de percurso cronometrado, trocando a muleta instrumentada
de braço. Os indivíduos caminharam utilizando a muleta de forma correta, como
descrito no anexo I. Os testes foram realizados com e sem aparato auxiliar de
sustentação sendo então as tensões encontradas comparadas.
Figura 6. Sensor de pressão FlexForce
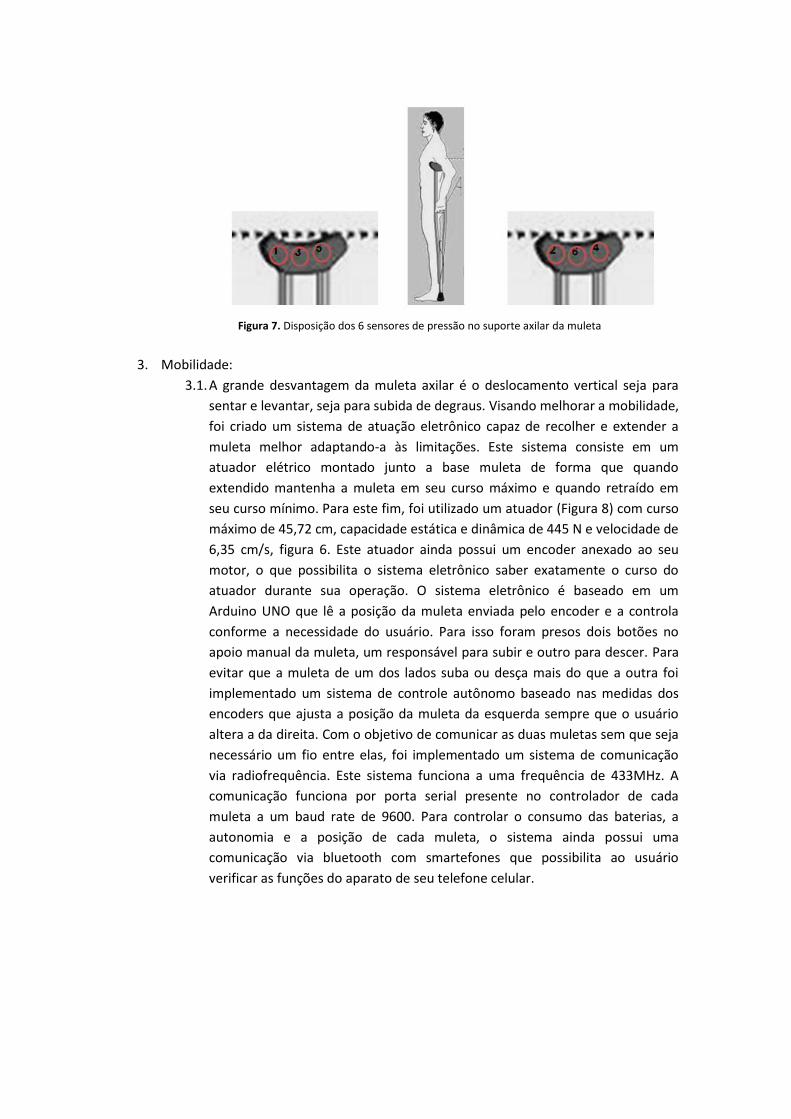
Figura 7. Disposição dos 6 sensores de pressão no suporte axilar da muleta
3. Mobilidade:
3.1. A grande desvantagem da muleta axilar é o deslocamento vertical seja para
sentar e levantar, seja para subida de degraus. Visando melhorar a mobilidade,
foi criado um sistema de atuação eletrônico capaz de recolher e extender a
muleta melhor adaptando-a às limitações. Este sistema consiste em um
atuador elétrico montado junto a base muleta de forma que quando
extendido mantenha a muleta em seu curso máximo e quando retraído em
seu curso mínimo. Para este fim, foi utilizado um atuador (Figura 8) com curso
máximo de 45,72 cm, capacidade estática e dinâmica de 445 N e velocidade de
6,35 cm/s, figura 6. Este atuador ainda possui um encoder anexado ao seu
motor, o que possibilita o sistema eletrônico saber exatamente o curso do
atuador durante sua operação. O sistema eletrônico é baseado em um
Arduino UNO que lê a posição da muleta enviada pelo encoder e a controla
conforme a necessidade do usuário. Para isso foram presos dois botões no
apoio manual da muleta, um responsável para subir e outro para descer. Para
evitar que a muleta de um dos lados suba ou desça mais do que a outra foi
implementado um sistema de controle autônomo baseado nas medidas dos
encoders que ajusta a posição da muleta da esquerda sempre que o usuário
altera a da direita. Com o objetivo de comunicar as duas muletas sem que seja
necessário um fio entre elas, foi implementado um sistema de comunicação
via radiofrequência. Este sistema funciona a uma frequência de 433MHz. A
comunicação funciona por porta serial presente no controlador de cada
muleta a um baud rate de 9600. Para controlar o consumo das baterias, a
autonomia e a posição de cada muleta, o sistema ainda possui uma
comunicação via bluetooth com smartefones que possibilita ao usuário
verificar as funções do aparato de seu telefone celular.
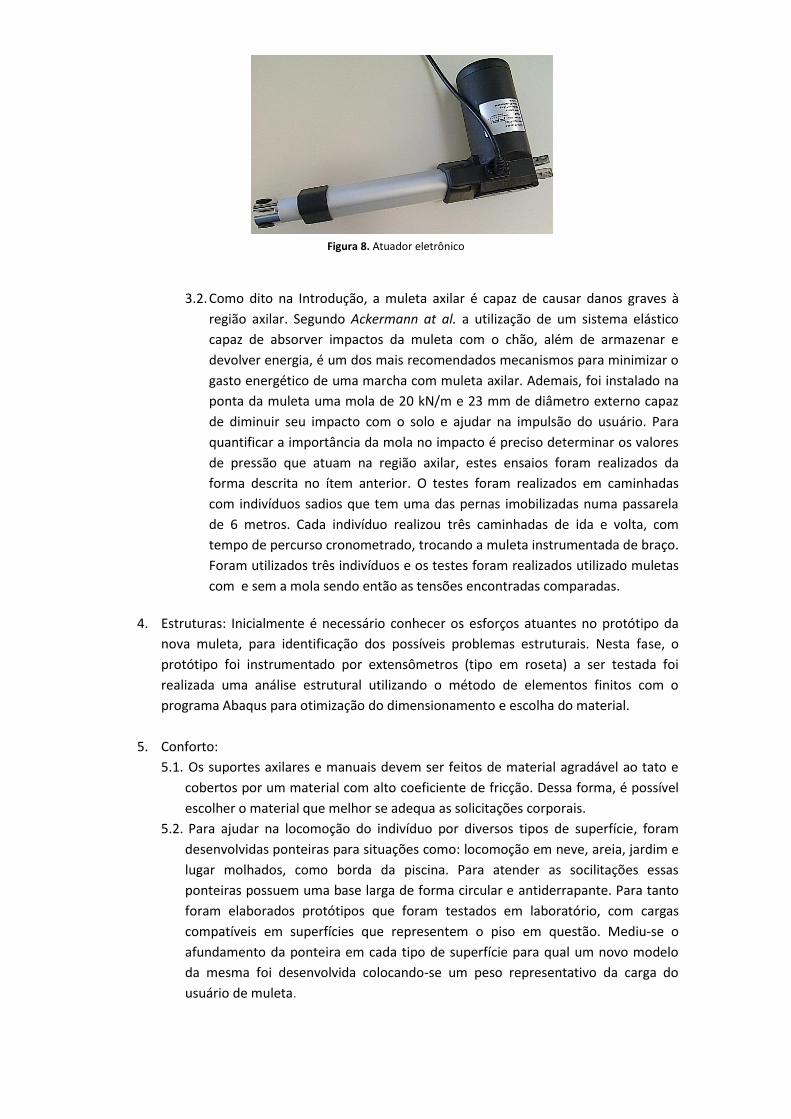
Figura 8. Atuador eletrônico
3.2. Como dito na Introdução, a muleta axilar é capaz de causar danos graves à
região axilar. Segundo Ackermann at al. a utilização de um sistema elástico
capaz de absorver impactos da muleta com o chão, além de armazenar e
devolver energia, é um dos mais recomendados mecanismos para minimizar o
gasto energético de uma marcha com muleta axilar. Ademais, foi instalado na
ponta da muleta uma mola de 20 kN/m e 23 mm de diâmetro externo capaz
de diminuir seu impacto com o solo e ajudar na impulsão do usuário. Para
quantificar a importância da mola no impacto é preciso determinar os valores
de pressão que atuam na região axilar, estes ensaios foram realizados da
forma descrita no ítem anterior. O testes foram realizados em caminhadas
com indivíduos sadios que tem uma das pernas imobilizadas numa passarela
de 6 metros. Cada indivíduo realizou três caminhadas de ida e volta, com
tempo de percurso cronometrado, trocando a muleta instrumentada de braço.
Foram utilizados três indivíduos e os testes foram realizados utilizado muletas
com e sem a mola sendo então as tensões encontradas comparadas.
4. Estruturas: Inicialmente é necessário conhecer os esforços atuantes no protótipo da
nova muleta, para identificação dos possíveis problemas estruturais. Nesta fase, o
protótipo foi instrumentado por extensômetros (tipo em roseta) a ser testada foi
realizada uma análise estrutural utilizando o método de elementos finitos com o
programa Abaqus para otimização do dimensionamento e escolha do material.
5. Conforto:
5.1. Os suportes axilares e manuais devem ser feitos de material agradável ao tato e
cobertos por um material com alto coeficiente de fricção. Dessa forma, é possível
escolher o material que melhor se adequa as solicitações corporais.
5.2. Para ajudar na locomoção do indivíduo por diversos tipos de superfície, foram
desenvolvidas ponteiras para situações como: locomoção em neve, areia, jardim e
lugar molhados, como borda da piscina. Para atender as socilitações essas
ponteiras possuem uma base larga de forma circular e antiderrapante. Para tanto
foram elaborados protótipos que foram testados em laboratório, com cargas
compatíveis em superfícies que representem o piso em questão. Mediu-se o
afundamento da ponteira em cada tipo de superfície para qual um novo modelo
da mesma foi desenvolvida colocando-se um peso representativo da carga do
usuário de muleta.
Resultados
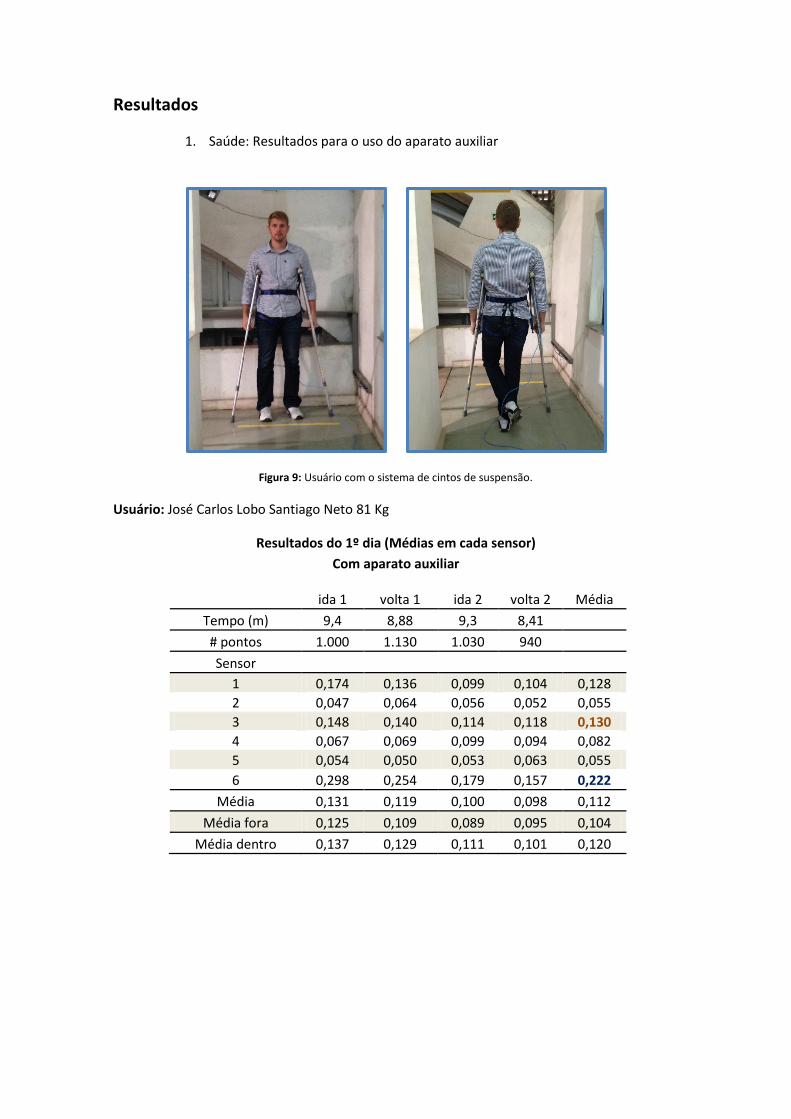
1. Saúde: Resultados para o uso do aparato auxiliar
Figura 9: Usuário com o sistema de cintos de suspensão.
Usuário: José Carlos Lobo Santiago Neto 81 Kg
Resultados do 1º dia (Médias em cada sensor)
Com aparato auxiliar
ida 1 volta 1 ida 2 volta 2 Média
Tempo (m) 9,4 8,88 9,3 8,41 # pontos 1.000 1.130 1.030 940 Sensor
1 0,174 0,136 0,099 0,104 0,128
2 0,047 0,064 0,056 0,052 0,055
3 0,148 0,140 0,114 0,118 0,130
4 0,067 0,069 0,099 0,094 0,082
5 0,054 0,050 0,053 0,063 0,055
6 0,298 0,254 0,179 0,157 0,222
Média 0,131 0,119 0,100 0,098 0,112
Média fora 0,125 0,109 0,089 0,095 0,104
Média dentro 0,137 0,129 0,111 0,101 0,120
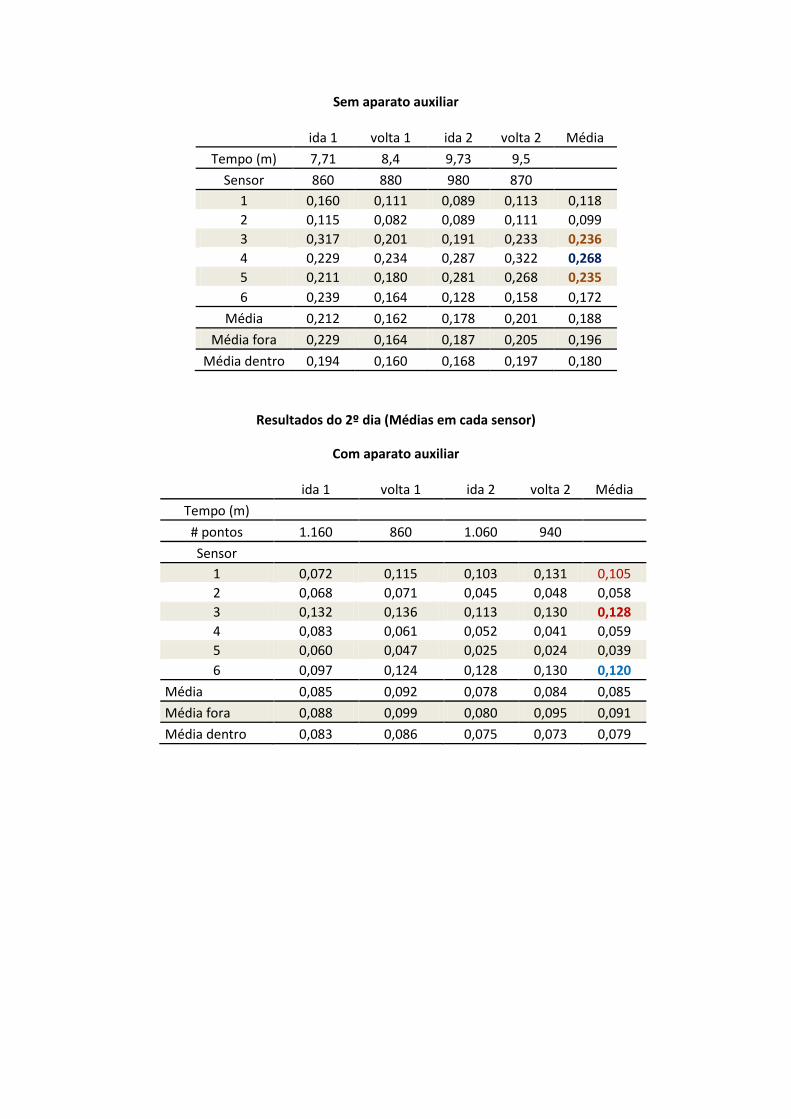
Sem aparato auxiliar
ida 1 volta 1 ida 2 volta 2 Média
Tempo (m) 7,71 8,4 9,73 9,5 Sensor 860 880 980 870 1 0,160 0,111 0,089 0,113 0,118
2 0,115 0,082 0,089 0,111 0,099
3 0,317 0,201 0,191 0,233 0,236
4 0,229 0,234 0,287 0,322 0,268
5 0,211 0,180 0,281 0,268 0,235
6 0,239 0,164 0,128 0,158 0,172
Média 0,212 0,162 0,178 0,201 0,188
Média fora 0,229 0,164 0,187 0,205 0,196
Média dentro 0,194 0,160 0,168 0,197 0,180
Resultados do 2º dia (Médias em cada sensor)
Com aparato auxiliar
ida 1 volta 1 ida 2 volta 2 Média
Tempo (m)
# pontos 1.160 860 1.060 940
Sensor
1 0,072 0,115 0,103 0,131 0,105
2 0,068 0,071 0,045 0,048 0,058
3 0,132 0,136 0,113 0,130 0,128
4 0,083 0,061 0,052 0,041 0,059
5 0,060 0,047 0,025 0,024 0,039
6 0,097 0,124 0,128 0,130 0,120
Média 0,085 0,092 0,078 0,084 0,085
Média fora 0,088 0,099 0,080 0,095 0,091
Média dentro 0,083 0,086 0,075 0,073 0,079
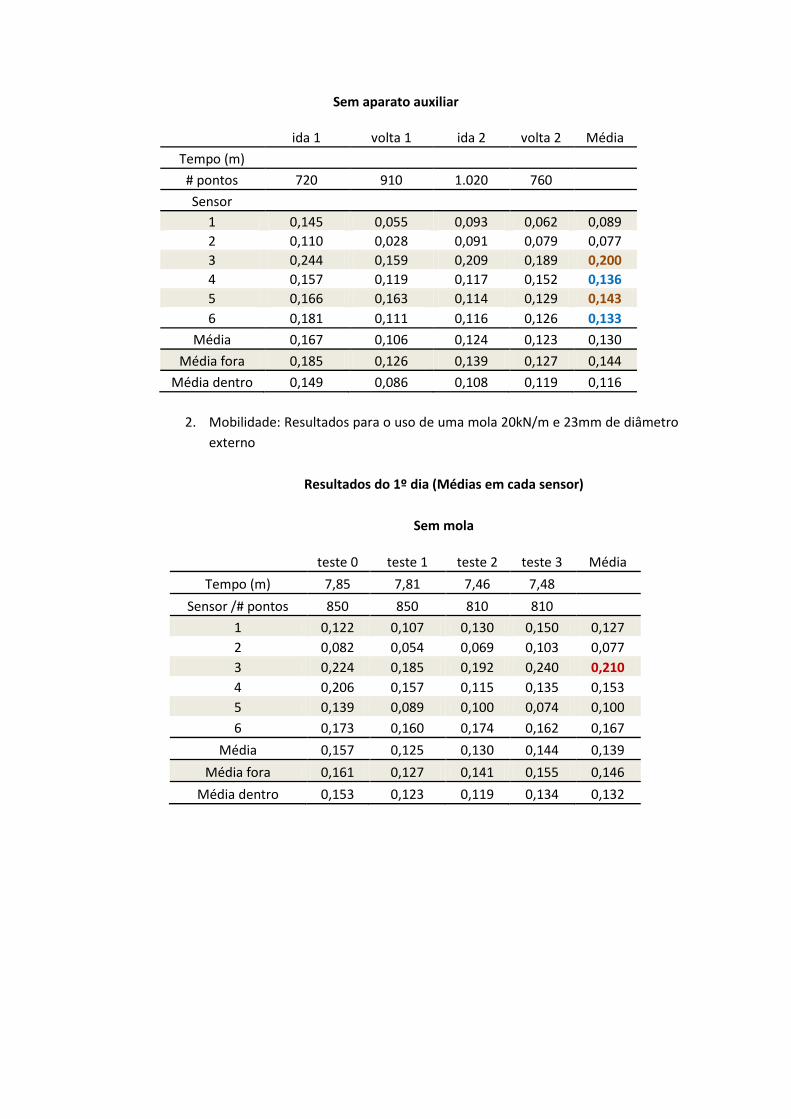
Sem aparato auxiliar
ida 1 volta 1 ida 2 volta 2 Média
Tempo (m)
# pontos 720 910 1.020 760
Sensor
1 0,145 0,055 0,093 0,062 0,089
2 0,110 0,028 0,091 0,079 0,077
3 0,244 0,159 0,209 0,189 0,200
4 0,157 0,119 0,117 0,152 0,136
5 0,166 0,163 0,114 0,129 0,143
6 0,181 0,111 0,116 0,126 0,133
Média 0,167 0,106 0,124 0,123 0,130
Média fora 0,185 0,126 0,139 0,127 0,144
Média dentro 0,149 0,086 0,108 0,119 0,116
2. Mobilidade: Resultados para o uso de uma mola 20kN/m e 23mm de diâmetro
externo
Resultados do 1º dia (Médias em cada sensor)
Sem mola
teste 0 teste 1 teste 2 teste 3 Média
Tempo (m) 7,85 7,81 7,46 7,48 Sensor /# pontos 850 850 810 810 1 0,122 0,107 0,130 0,150 0,127
2 0,082 0,054 0,069 0,103 0,077
3 0,224 0,185 0,192 0,240 0,210
4 0,206 0,157 0,115 0,135 0,153
5 0,139 0,089 0,100 0,074 0,100
6 0,173 0,160 0,174 0,162 0,167
Média 0,157 0,125 0,130 0,144 0,139
Média fora 0,161 0,127 0,141 0,155 0,146
Média dentro 0,153 0,123 0,119 0,134 0,132
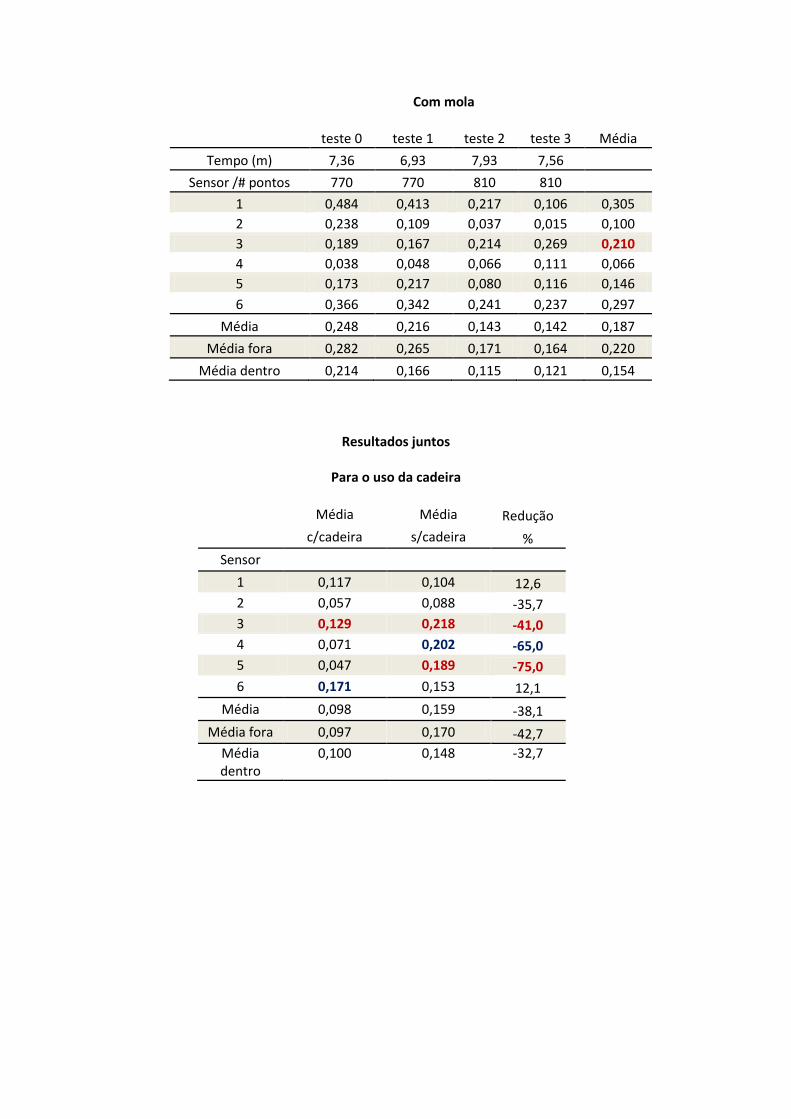
Com mola
teste 0 teste 1 teste 2 teste 3 Média
Tempo (m) 7,36 6,93 7,93 7,56 Sensor /# pontos 770 770 810 810 1 0,484 0,413 0,217 0,106 0,305
2 0,238 0,109 0,037 0,015 0,100
3 0,189 0,167 0,214 0,269 0,210
4 0,038 0,048 0,066 0,111 0,066
5 0,173 0,217 0,080 0,116 0,146
6 0,366 0,342 0,241 0,237 0,297
Média 0,248 0,216 0,143 0,142 0,187
Média fora 0,282 0,265 0,171 0,164 0,220
Média dentro 0,214 0,166 0,115 0,121 0,154
Resultados juntos
Para o uso da cadeira
Média Média Redução
c/cadeira s/cadeira %
Sensor
1 0,117 0,104 12,6
2 0,057 0,088 -35,7
3 0,129 0,218 -41,0
4 0,071 0,202 -65,0
5 0,047 0,189 -75,0
6 0,171 0,153 12,1
Média 0,098 0,159 -38,1
Média fora 0,097 0,170 -42,7
Média dentro
0,100
0,148
-32,7
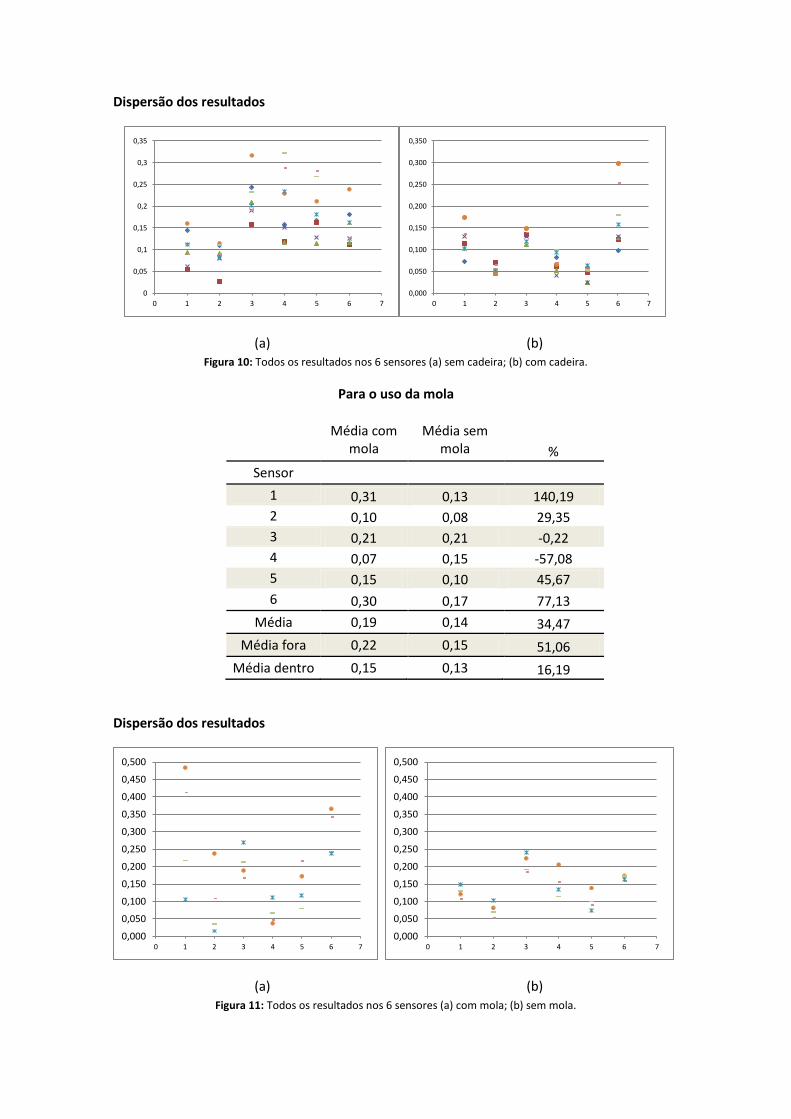
Dispersão dos resultados
(a) (b) Figura 10: Todos os resultados nos 6 sensores (a) sem cadeira; (b) com cadeira.
Para o uso da mola
Média com mola
Média sem mola %
Sensor
1 0,31 0,13 140,19
2 0,10 0,08 29,35
3 0,21 0,21 -0,22
4 0,07 0,15 -57,08
5 0,15 0,10 45,67
6 0,30 0,17 77,13
Média 0,19 0,14 34,47
Média fora 0,22 0,15 51,06
Média dentro 0,15 0,13 16,19
Dispersão dos resultados
(a) (b) Figura 11: Todos os resultados nos 6 sensores (a) com mola; (b) sem mola.
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0 1 2 3 4 5 6 7
0,000
0,050
0,100
0,150
0,200
0,250
0,300
0,350
0 1 2 3 4 5 6 7
0,000
0,050
0,100
0,150
0,200
0,250
0,300
0,350
0,400
0,450
0,500
0 1 2 3 4 5 6 7 0,000
0,050
0,100
0,150
0,200
0,250
0,300
0,350
0,400
0,450
0,500
0 1 2 3 4 5 6 7
A média da pressão média dos sensores junto ao braço e ao corpo foram semelhantes com o uso do aparato auxiliar de sustentação.
O uso desse aparato reduziu a pressão média nos sensores # 3 e 5 em um percentual de 41 e 75%, respectivamente, ambos no lado da muleta em contato com o braço. Reduziu também no sensor #4 em 65%, este em contato com o corpo.
Todos os sensores tiveram a pressão reduziada com o uso do aparato, com excessão do #1 cuja pressão aumentou em 43%. Nos sensores junto ao braço houve uma redução de 45% (#3) e 49% (#5).
Pode-se verificar que os sensores mais solicitados foram #1 (0,305) (com mola e próximo ao
corpo). Já sem mola os sensores # 4; 3; e 6 foram os mais solicitados, todos os três com
valores inferiores a 0,210. É possível observar que os maiores valores mola ocorreram em dois
sensores próximos ao braço, #1 e 3 onde podem ocorrer problemas significativos de saúde. O
sensor # 3 está localizado coincidente com o nervo radial e artéria axilar.
Se levarmos em conta os resultados acima verificamos que o uso da mola aumenta a pressão nesta região, sensores 1 e 5; de 140% e 45% respectivamente e no sensor 3 a pressão é igual.
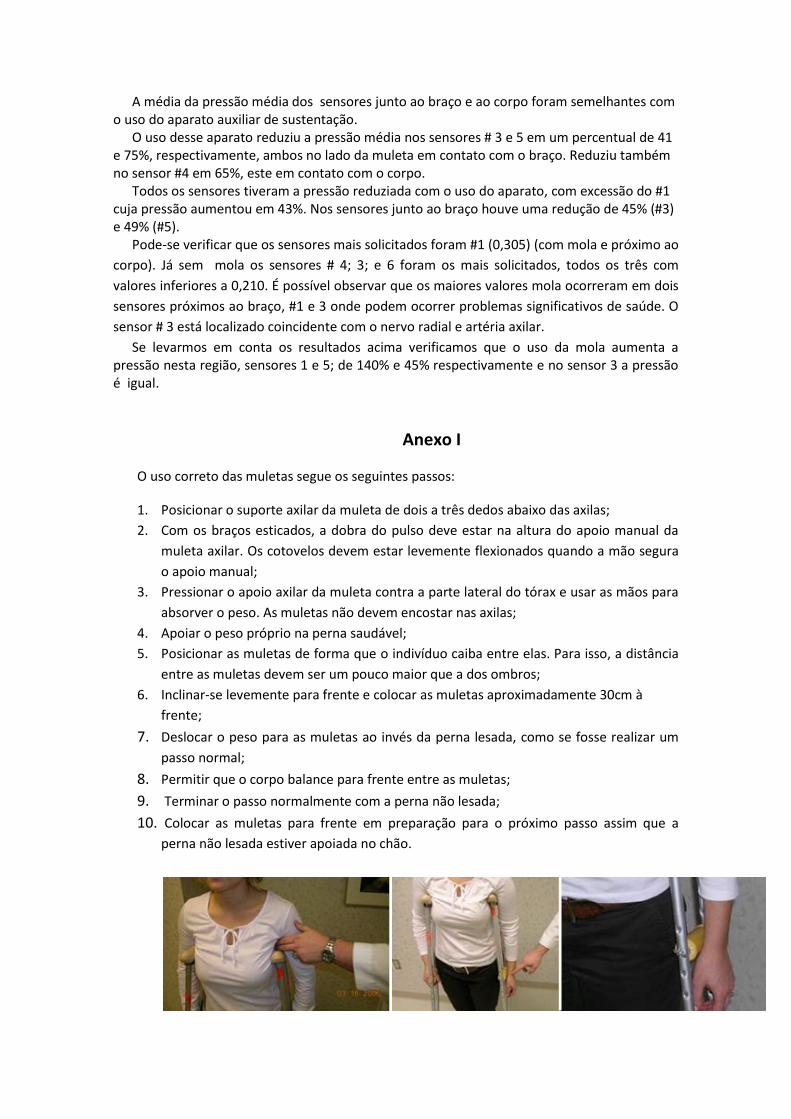
Anexo I
O uso correto das muletas segue os seguintes passos:
1. Posicionar o suporte axilar da muleta de dois a três dedos abaixo das axilas;
2. Com os braços esticados, a dobra do pulso deve estar na altura do apoio manual da
muleta axilar. Os cotovelos devem estar levemente flexionados quando a mão segura
o apoio manual;
3. Pressionar o apoio axilar da muleta contra a parte lateral do tórax e usar as mãos para
absorver o peso. As muletas não devem encostar nas axilas;
4. Apoiar o peso próprio na perna saudável;
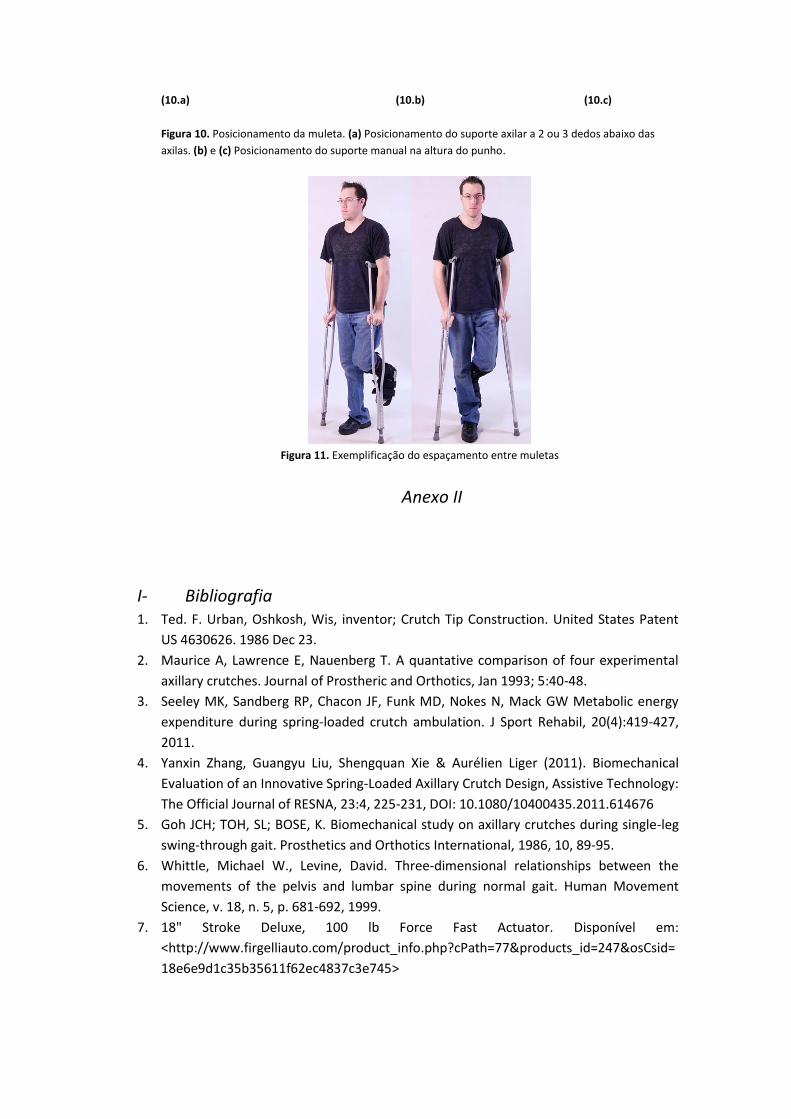
5. Posicionar as muletas de forma que o indivíduo caiba entre elas. Para isso, a distância
entre as muletas devem ser um pouco maior que a dos ombros;
6. Inclinar-se levemente para frente e colocar as muletas aproximadamente 30cm à
frente;
7. Deslocar o peso para as muletas ao invés da perna lesada, como se fosse realizar um
passo normal;
8. Permitir que o corpo balance para frente entre as muletas;
9. Terminar o passo normalmente com a perna não lesada;
10. Colocar as muletas para frente em preparação para o próximo passo assim que a
perna não lesada estiver apoiada no chão.
(10.a) (10.b) (10.c)
Figura 10. Posicionamento da muleta. (a) Posicionamento do suporte axilar a 2 ou 3 dedos abaixo das
axilas. (b) e (c) Posicionamento do suporte manual na altura do punho.
Figura 11. Exemplificação do espaçamento entre muletas
Anexo II
I- Bibliografia 1. Ted. F. Urban, Oshkosh, Wis, inventor; Crutch Tip Construction. United States Patent
US 4630626. 1986 Dec 23.
2. Maurice A, Lawrence E, Nauenberg T. A quantative comparison of four experimental
axillary crutches. Journal of Prostheric and Orthotics, Jan 1993; 5:40-48.
3. Seeley MK, Sandberg RP, Chacon JF, Funk MD, Nokes N, Mack GW Metabolic energy
expenditure during spring-loaded crutch ambulation. J Sport Rehabil, 20(4):419-427,
2011.
4. Yanxin Zhang, Guangyu Liu, Shengquan Xie & Aurélien Liger (2011). Biomechanical
Evaluation of an Innovative Spring-Loaded Axillary Crutch Design, Assistive Technology:
The Official Journal of RESNA, 23:4, 225-231, DOI: 10.1080/10400435.2011.614676
5. Goh JCH; TOH, SL; BOSE, K. Biomechanical study on axillary crutches during single-leg
swing-through gait. Prosthetics and Orthotics International, 1986, 10, 89-95.
6. Whittle, Michael W., Levine, David. Three-dimensional relationships between the
movements of the pelvis and lumbar spine during normal gait. Human Movement
Science, v. 18, n. 5, p. 681-692, 1999.
7. 18" Stroke Deluxe, 100 lb Force Fast Actuator. Disponível em:
<http://www.firgelliauto.com/product_info.php?cPath=77&products_id=247&osCsid=
18e6e9d1c35b35611f62ec4837c3e745>

8. How to use crutches. Produced by American Orthopaedic Foot & Ankle Society.
Disponível em: <http://www.aofas.org/footcaremd/how-to/foot-injury/Pages/How-to-
Use-Crutches.aspx>
9. Como andar de muletas. Criado por Jack.aw. Disponível em:
<http://pt.wikihow.com/Andar-de-Muletas>
10. Como usar muletas, bengalas e andador. Traduzido por Kodi Kojima. Disponível em:
<http://ortopediaecia.blogspot.com.br/2009/10/como-usar-muletas-bengalas-e-
andador.html>