desenvolvimento de metodologia para monitoramento remoto … · 2017-11-09 · 3.15 avaliação da...
TRANSCRIPT
Relatório de Acompanhamento
Final
1
RELATÓRIO FINAL DE
ACOMPANHAMENTO
Desenvolvimento de Metodologia para Monitoramento
Remoto de Rodovias – VANTRod
Data de Emissão: 15/09/2017
Empresa Proponente: Triunfo Concebra
Gerente do Projeto: Rogério Vargas Cezimbra
Endereço: Rua Caiapiá, Quadra E5, Lote 5, Alphaville Flamboyant, CEP 74884-
554, Goiânia - GO
Telefone: (62) 3623 8900
Entidade Executora: Universidade Tecnológica Federal do Paraná
Coordenador do Projeto: Professor Cicero Martelli
Endereço: Av. Sete de Setembro, 3165 CEP 80230-901 - Curitiba - PR - Brasil
Telefone: (41) 3310 4685
Relatório de Acompanhamento
Final
2
Sumário
1. INTRODUÇÃO ................................................................................................................ 3
2. ESTRUTURA ANALÍTICA DO PROJETO ................................................................. 3
3. RESULTADOS ................................................................................................................ 4
3.1 Avaliação e aquisição do VANT ............................................................................. 4
3.2 Estudos de normas (ANAC e ANATEL) ............................................................. 10
3.3 Estudo de rotas e pontos de interesse .............................................................. 19
3.4 Estudo de software de reconstrução de imagens .......................................... 28
3.5 Descrição de procedimentos para execução de tarefas ............................... 28
3.6 Definição de Parâmetros de voo (rota, distância, altura, tempo...) ............ 44
3.7 Caracterização e parametrização de software de reconstrução de imagem .................................................................................................................................. 47
3.7.1 Pré-processamento ......................................................................................... 73
3.7.2 Segmentação de objetos ............................................................................... 79
3.7.3 Classificação de objetos ................................................................................ 80
3.8 Avaliação de parâmetros de voo em ambiente controlado .......................... 83
3.9 Aquisição e processamento de imagens em ambiente controlado ........... 85
3.10 Avaliação de parâmetros de voo em ambiente real .................................... 91
3.11 Aquisição e processamento de imagens de ambiente real ...................... 92
3.11.1 Resultados para o setor de operações .................................................... 92
3.11.2 Resultados referente a manutenção da rodovia .................................... 95
3.12 Avaliação dos resultados gerados em ambiente real .............................. 100
3.13 Geração de mapas e relatórios de pontos de interesse .......................... 102
3.14 Determinação da melhor tecnologia a partir dos resultados obtidos . 106
3.15 Avaliação da pesquisa realizada .................................................................... 107
4. CONCLUSÕES ........................................................................................................... 109
REFERÊNCIAS ................................................................................................................... 111
Relatório de Acompanhamento
Final
3
1. INTRODUÇÃO
Este documento consiste no relatório final do projeto intitulado “Metodologia para
Monitoramento Remoto de Rodovias – VANTRod”, aprovado pela ANTT, Agência Nacional
de Transportes Terrestres, em comunicação pelo ofício no 81/2015/GEROR/SUINF do dia
04/08/2015. São apresentados os resultados e discussões referentes às atividades
contempladas no cronograma de ações presente no plano de trabalho aprovado. Foram
realizadas as atividades das seguintes etapas, que serão discutidas em detalhe ao longo
do texto:
1) Avaliação e Aquisição do VANT
2) Estudo de normas (ANAC e ANATEL)
3) Estudo de rotas e pontos de interesse
4) Estudo de software de reconstrução de imagens
5) Descrição de procedimentos para execução de tarefas
6) Definição de parâmetros de voo (rota, distância, altura, tempo...)
7) Caracterização e parametrização de software de reconstrução de imagem
8) Avaliação de parâmetros de voo em ambiente controlado
9) Aquisição e processamento de imagens em ambiente controlado
10) Avaliação de parâmetros de voo em ambiente real
11) Aquisição e processamento de imagens de ambiente real
12) Avaliação dos resultados em ambiente real
13) Geração de mapas e relatórios de pontos de interesse
14) Determinação da melhor tecnologia a partir dos resultados obtidos
15) Avaliação da pesquisa realizada
2. ESTRUTURA ANALÍTICA DO PROJETO
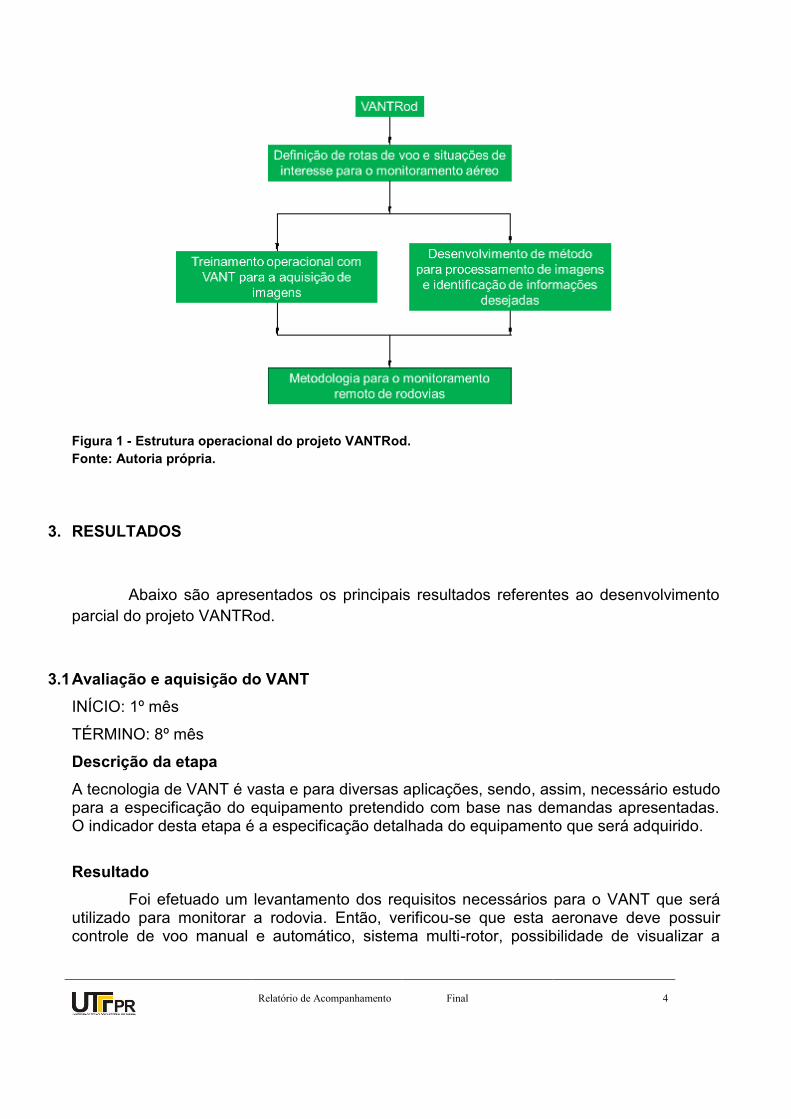
A estrutura operacional do projeto é apresenta no diagrama abaixo (Figura 1)
identificando as ações para o desenvolvimento completo do plano de trabalho proposto.
Relatório de Acompanhamento
Final
4
Figura 1 - Estrutura operacional do projeto VANTRod.
Fonte: Autoria própria.
3. RESULTADOS
Abaixo são apresentados os principais resultados referentes ao desenvolvimento
parcial do projeto VANTRod.
3.1 Avaliação e aquisição do VANT
INÍCIO: 1º mês
TÉRMINO: 8º mês
Descrição da etapa
A tecnologia de VANT é vasta e para diversas aplicações, sendo, assim, necessário estudo para a especificação do equipamento pretendido com base nas demandas apresentadas. O indicador desta etapa é a especificação detalhada do equipamento que será adquirido.
Resultado
Foi efetuado um levantamento dos requisitos necessários para o VANT que será utilizado para monitorar a rodovia. Então, verificou-se que esta aeronave deve possuir controle de voo manual e automático, sistema multi-rotor, possibilidade de visualizar a
Relatório de Acompanhamento
Final
5
câmera em tempo real, proteção contra falhas, retorno automático em caso de falhas, ótimo controle de estabilidade, sendo de ponto crítico a resolução da câmera acoplada. Como um dos objetivos deste projeto é efetuar o processamento de imagens para se extrair informações que possibilitem a tomada de decisões, é necessário que as imagens adquiridas tenham a melhor qualidade possível, justificando assim, a necessidade de uma câmera com alta resolução.
Inicialmente a pesquisa se concentrou em empresas brasileiras que desenvolvessem e efetuassem a venda deste tipo de aeronave. Esta pesquisa foi efetuada entre 2015 e 2016, sendo esta a época de início desta etapa. Uma das empresas que fabricam VANT no modelo multirotor é a SkyDrones com seu modelo SD6 Spyder XL. Porém a autonomia dos equipamentos é de apenas 5 a 12 minutos, o que é considerada muito baixa se comparada com as concorrentes. Em nível internacional, entre várias opções e empresas, a empresa que disponibiliza VANTs nos requisitos desejados é a DJI. Esta empresa possui vários modelos, sendo alguns destes o Phantom, Inspire e Matrice. O modelo Phantom 3 possui, 4 rotores, câmera acoplada de 12,8 MP, e possui as funções requisitadas, proporcionando uma autonomia de 22 minutos. O modelo Inspire 1 possui 4 rotores, a opção de ter uma câmera de 12,8 MP com lente fixa e outra de 16 MP com lente removível. Possibilidade de modificar a aerodinâmica para que a câmera tenha maior liberdade e com sua bateria maior proporciona autonomia de 22 minutos (DJI, 2017a).
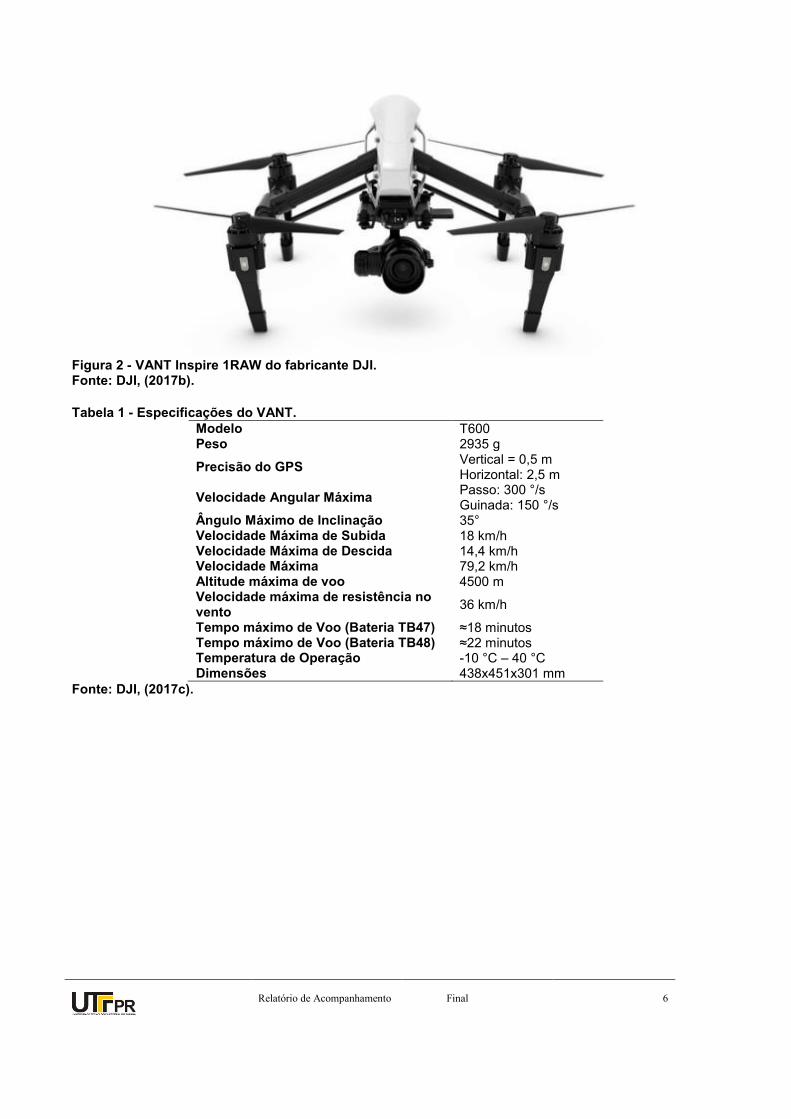
O VANT utilizado neste projeto foi adquirido em 2016. Neste ano, o VANT que oferecia todas as funcionalidades desejadas com câmera acoplada de alta resolução era o VANT Inspire 1 RAW do fabricante DJI. Esta aeronave vem equipada com a câmera Zenmuse X5R, possibilidade de utilizar mais de um controle e autonomia de 18 minutos. Como o Inspire 1 permite alterar a câmera acoplada, se utilizada a câmera Zenmuse X3, a autonomia de voo é de aproximadamente 23 minutos com a bateria estendida. De forma demonstrativa, a Figura 2 apresenta uma imagem do VANT. Além de atender as especificações requeridas, este é homologado pela ANATEL. Algumas de suas características são a possibilidade de configuração manual através de aplicativo para dispositivo móvel, visualização em tempo real do local onde o VANT está sobrevoando, sistema para seguir o usuário, auto decolagem e auto pouso, telemetria do VANT, modulação da aerodinâmica do VANT, para se ter melhor controle da câmera, e o fabricante disponibiliza ferramenta para desenvolvimento de aplicativos para Android ou iOS. Desta forma, a Tabela 1 apresenta as especificações técnicas do VANT selecionado para ser utilizado no projeto.
Relatório de Acompanhamento
Final
6
Figura 2 - VANT Inspire 1RAW do fabricante DJI. Fonte: DJI, (2017b).
Tabela 1 - Especificações do VANT.
Modelo T600 Peso 2935 g
Precisão do GPS Vertical = 0,5 m Horizontal: 2,5 m
Velocidade Angular Máxima Passo: 300 °/s Guinada: 150 °/s
Ângulo Máximo de Inclinação 35° Velocidade Máxima de Subida 18 km/h Velocidade Máxima de Descida 14,4 km/h Velocidade Máxima 79,2 km/h Altitude máxima de voo 4500 m Velocidade máxima de resistência no vento
36 km/h
Tempo máximo de Voo (Bateria TB47) ≈18 minutos Tempo máximo de Voo (Bateria TB48) ≈22 minutos Temperatura de Operação -10 °C – 40 °C Dimensões 438x451x301 mm
Fonte: DJI, (2017c).
Relatório de Acompanhamento
Final
7
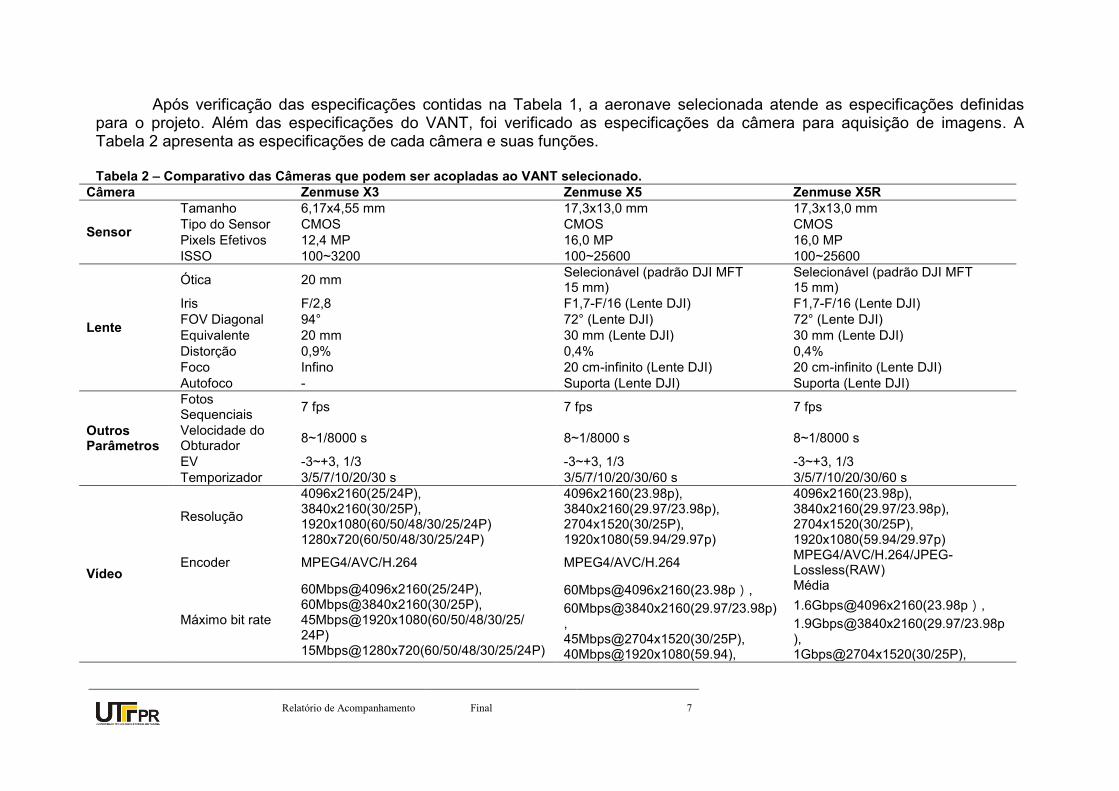
Após verificação das especificações contidas na Tabela 1, a aeronave selecionada atende as especificações definidas para o projeto. Além das especificações do VANT, foi verificado as especificações da câmera para aquisição de imagens. A Tabela 2 apresenta as especificações de cada câmera e suas funções. Tabela 2 – Comparativo das Câmeras que podem ser acopladas ao VANT selecionado.
Câmera Zenmuse X3 Zenmuse X5 Zenmuse X5R
Sensor
Tamanho 6,17x4,55 mm 17,3x13,0 mm 17,3x13,0 mm
Tipo do Sensor CMOS CMOS CMOS
Pixels Efetivos 12,4 MP 16,0 MP 16,0 MP
ISSO 100~3200 100~25600 100~25600
Lente
Ótica 20 mm Selecionável (padrão DJI MFT 15 mm)
Selecionável (padrão DJI MFT 15 mm)
Iris F/2,8 F1,7-F/16 (Lente DJI) F1,7-F/16 (Lente DJI)
FOV Diagonal 94° 72° (Lente DJI) 72° (Lente DJI)
Equivalente 20 mm 30 mm (Lente DJI) 30 mm (Lente DJI)
Distorção 0,9% 0,4% 0,4%
Foco Infino 20 cm-infinito (Lente DJI) 20 cm-infinito (Lente DJI)
Autofoco - Suporta (Lente DJI) Suporta (Lente DJI)
Outros Parâmetros
Fotos Sequenciais
7 fps 7 fps 7 fps
Velocidade do Obturador
8~1/8000 s 8~1/8000 s 8~1/8000 s
EV -3~+3, 1/3 -3~+3, 1/3 -3~+3, 1/3
Temporizador 3/5/7/10/20/30 s 3/5/7/10/20/30/60 s 3/5/7/10/20/30/60 s
Vídeo
Resolução
4096x2160(25/24P), 3840x2160(30/25P), 1920x1080(60/50/48/30/25/24P) 1280x720(60/50/48/30/25/24P)
4096x2160(23.98p), 3840x2160(29.97/23.98p), 2704x1520(30/25P), 1920x1080(59.94/29.97p)
4096x2160(23.98p), 3840x2160(29.97/23.98p), 2704x1520(30/25P), 1920x1080(59.94/29.97p)
Encoder MPEG4/AVC/H.264 MPEG4/AVC/H.264 MPEG4/AVC/H.264/JPEG-Lossless(RAW)
Máximo bit rate
60Mbps@4096x2160(25/24P), 60Mbps@3840x2160(30/25P), 45Mbps@1920x1080(60/50/48/30/25/ 24P) 15Mbps@1280x720(60/50/48/30/25/24P)
60Mbps@4096x2160(23.98p),
60Mbps@3840x2160(29.97/23.98p), 45Mbps@2704x1520(30/25P), 40Mbps@1920x1080(59.94),
Média
1.6Gbps@4096x2160(23.98p),
1.9Gbps@3840x2160(29.97/23.98p), 1Gbps@2704x1520(30/25P),
Relatório de Acompanhamento
Final
8
Câmera Zenmuse X3 Zenmuse X5 Zenmuse X5R
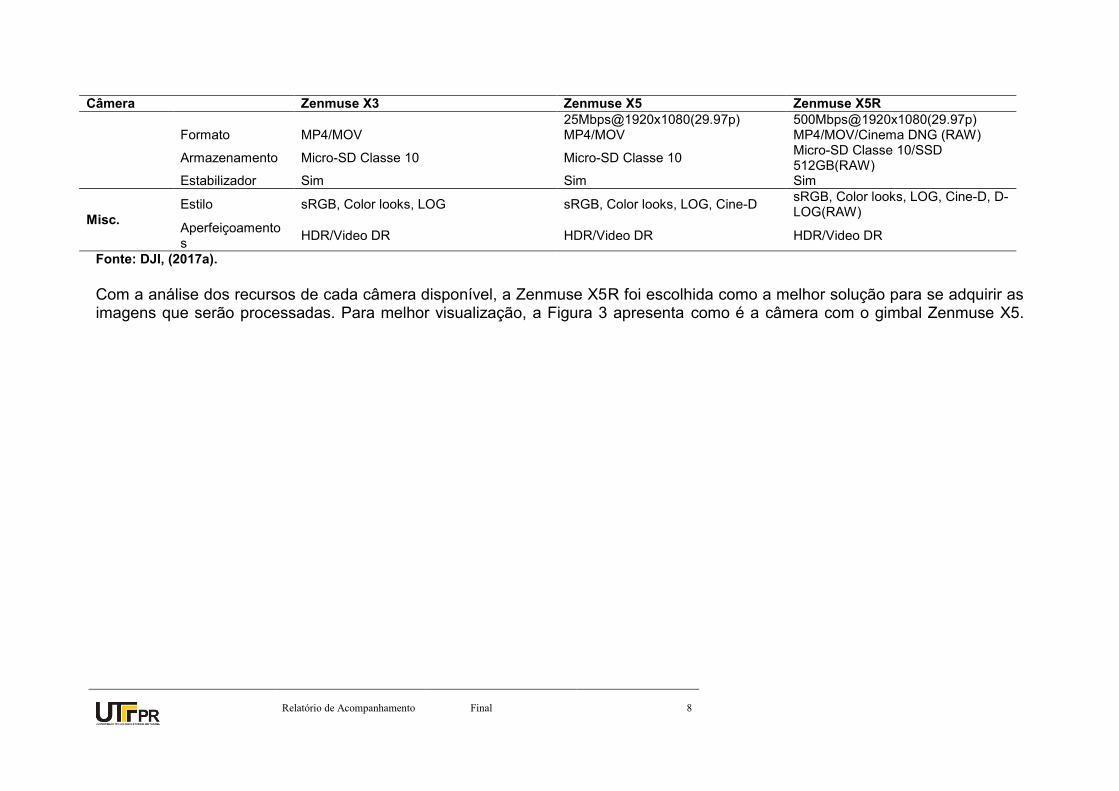
25Mbps@1920x1080(29.97p) 500Mbps@1920x1080(29.97p) Formato MP4/MOV MP4/MOV MP4/MOV/Cinema DNG (RAW)
Armazenamento Micro-SD Classe 10 Micro-SD Classe 10 Micro-SD Classe 10/SSD 512GB(RAW)
Estabilizador Sim Sim Sim
Misc. Estilo sRGB, Color looks, LOG sRGB, Color looks, LOG, Cine-D
sRGB, Color looks, LOG, Cine-D, D-LOG(RAW)
Aperfeiçoamentos
HDR/Video DR HDR/Video DR HDR/Video DR
Fonte: DJI, (2017a).
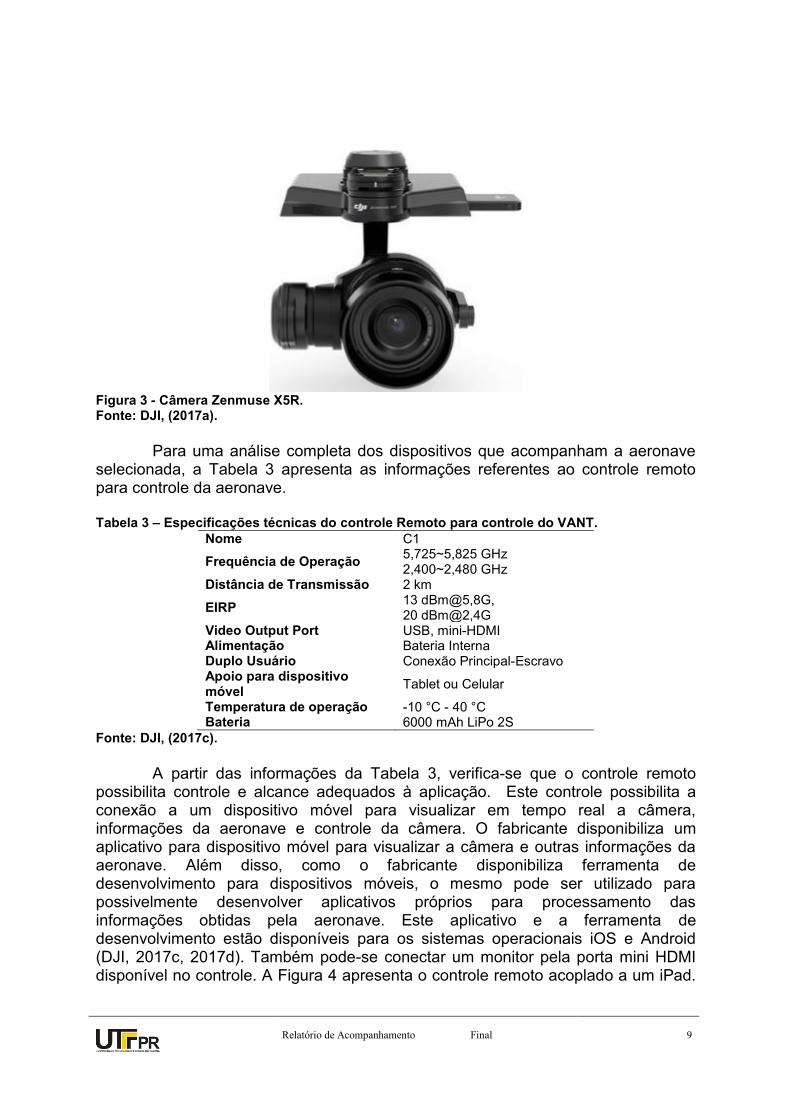
Com a análise dos recursos de cada câmera disponível, a Zenmuse X5R foi escolhida como a melhor solução para se adquirir as imagens que serão processadas. Para melhor visualização, a Figura 3 apresenta como é a câmera com o gimbal Zenmuse X5.
Relatório de Acompanhamento
Final
9
Figura 3 - Câmera Zenmuse X5R. Fonte: DJI, (2017a).
Para uma análise completa dos dispositivos que acompanham a aeronave
selecionada, a Tabela 3 apresenta as informações referentes ao controle remoto para controle da aeronave. Tabela 3 – Especificações técnicas do controle Remoto para controle do VANT.
Nome C1
Frequência de Operação 5,725~5,825 GHz 2,400~2,480 GHz
Distância de Transmissão 2 km
EIRP 13 dBm@5,8G, 20 dBm@2,4G
Video Output Port USB, mini-HDMI Alimentação Bateria Interna Duplo Usuário Conexão Principal-Escravo Apoio para dispositivo móvel
Tablet ou Celular
Temperatura de operação -10 °C - 40 °C Bateria 6000 mAh LiPo 2S
Fonte: DJI, (2017c).
A partir das informações da Tabela 3, verifica-se que o controle remoto
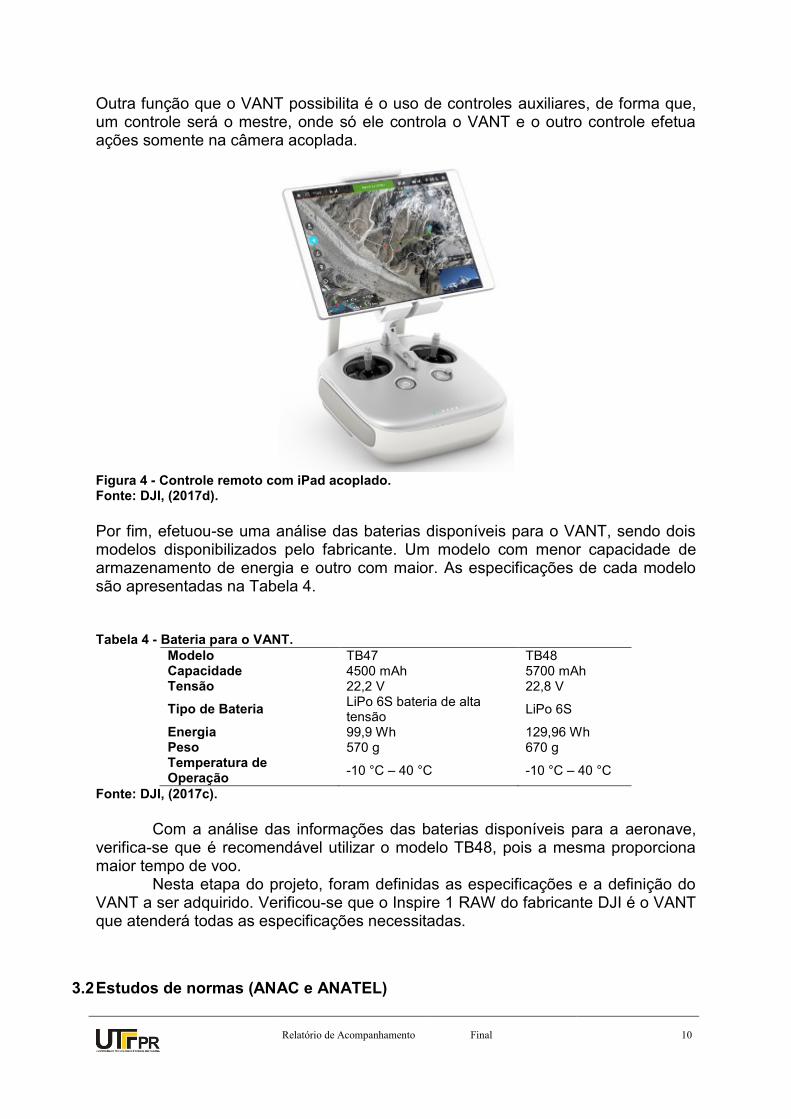
possibilita controle e alcance adequados à aplicação. Este controle possibilita a conexão a um dispositivo móvel para visualizar em tempo real a câmera, informações da aeronave e controle da câmera. O fabricante disponibiliza um aplicativo para dispositivo móvel para visualizar a câmera e outras informações da aeronave. Além disso, como o fabricante disponibiliza ferramenta de desenvolvimento para dispositivos móveis, o mesmo pode ser utilizado para possivelmente desenvolver aplicativos próprios para processamento das informações obtidas pela aeronave. Este aplicativo e a ferramenta de desenvolvimento estão disponíveis para os sistemas operacionais iOS e Android (DJI, 2017c, 2017d). Também pode-se conectar um monitor pela porta mini HDMI disponível no controle. A Figura 4 apresenta o controle remoto acoplado a um iPad.
Relatório de Acompanhamento
Final
10
Outra função que o VANT possibilita é o uso de controles auxiliares, de forma que, um controle será o mestre, onde só ele controla o VANT e o outro controle efetua ações somente na câmera acoplada.
Figura 4 - Controle remoto com iPad acoplado. Fonte: DJI, (2017d).
Por fim, efetuou-se uma análise das baterias disponíveis para o VANT, sendo dois modelos disponibilizados pelo fabricante. Um modelo com menor capacidade de armazenamento de energia e outro com maior. As especificações de cada modelo são apresentadas na Tabela 4. Tabela 4 - Bateria para o VANT.
Modelo TB47 TB48 Capacidade 4500 mAh 5700 mAh Tensão 22,2 V 22,8 V
Tipo de Bateria LiPo 6S bateria de alta tensão
LiPo 6S
Energia 99,9 Wh 129,96 Wh Peso 570 g 670 g Temperatura de Operação
-10 °C – 40 °C -10 °C – 40 °C
Fonte: DJI, (2017c).
Com a análise das informações das baterias disponíveis para a aeronave,
verifica-se que é recomendável utilizar o modelo TB48, pois a mesma proporciona maior tempo de voo.
Nesta etapa do projeto, foram definidas as especificações e a definição do VANT a ser adquirido. Verificou-se que o Inspire 1 RAW do fabricante DJI é o VANT que atenderá todas as especificações necessitadas.
3.2 Estudos de normas (ANAC e ANATEL)
Relatório de Acompanhamento
Final
11
INÍCIO: 1º mês
TÉRMINO: 6º mês
Descrição da etapa
Apesar de falta de regulamentação específica, já há documentos oficiais que auxiliarão na aplicação segura e respeitando a legislação vigente. O indicador desta etapa é um documento apontando pontos importantes a serem observados para execução de voos e legislação pertinentes que devem ser observadas. Resultado
Desde o princípio da aviação, aeronaves sem tripulação já são consideradas. A Convenção de Paris de 1919, já menciona que este tipo de veículo aéreo deve ser regulamentado. Com o grande crescimento deste tipo de aeronave, vários países estão se preocupando com a segurança do espaço aéreo, pois, essas aeronaves não estão consideradas na maioria dos regulamentos de aviação (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2015). Diante disso, vários países já formularam normas para enquadrar este tipo de aeronave (COLOMINA; MOLINA, 2014). No Brasil, a Agência Nacional de Aviação Civil – ANAC, verificou que para se ter uma melhor segurança do espaço aéreo, seria necessário formular uma regulamentação especial para este tipo de aeronave. Assim, a ANAC formulou um Regulamento Brasileiro da Aviação Civil Especial (RBAC-E) nº 94 intitulado “Requisitos Gerais para Veículos Aéreos não tripulados e Aeromodelos” (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a). Este regulamento foi regulamentado em maio de 2017.
Foram destacados alguns pontos que possuem maior relevância para esse projeto. O tópico E94.3 efetua várias definições de grande importância para compreensão da regulamentação. Abaixo está transcrito todas as definições que são efetuadas por esse documento.
(a) Para os propósitos deste Regulamento Especial são válidas as
definições abaixo: (1) aeromodelo significa toda aeronave não tripulada com finalidade de
recreação; (2) Aeronave Remotamente Pilotada (Remotely-Piloted Aircraft – RPA)
significa a aeronave não tripulada pilotada a partir de uma estação de pilotagem remota com finalidade diversa de recreação;
(3) área distante de terceiros significa área, determinada pelo operador, considerada a partir de certa distância horizontal da aeronave não tripulada em operação, na qual pessoas não envolvidas e não anuentes no solo não estão submetidas a risco inaceitável à segurança. Em nenhuma hipótese a distância da aeronave não tripulada poderá ser inferior a 30 metros horizontais de pessoas não envolvidas e não anuentes com a operação. O limite de 30 metros não precisa ser observado caso haja uma barreira mecânica suficientemente forte para isolar e proteger as pessoas não envolvidas e não anuentes na eventualidade de um acidente;
Nota: O limite de 30m, neste caso, é critério para a aplicação das regras da ANAC. O acesso ao espaço aéreo é de competência do DECEA, o qual poderá estabelecer limites inferiores de maior magnitude.
(4) Estação de Pilotagem Remota (Remote Pilot Station – RPS) significa o componente do RPAS contendo os equipamentos necessários à pilotagem da RPA;
Relatório de Acompanhamento
Final
12
(5) observador de RPA significa pessoa que, sem o auxílio de equipamentos ou lentes (exceto as corretivas), auxilia o piloto remoto na condução segura do voo, mantendo contato visual direto com a RPA;
(6) Operação Além da Linha de Visada Visual (Beyond Visual Line of Sight – BVLOS operation) significa a operação que não atenda às condições VLOS ou EVLOS;
(7) operação autônoma significa a operação normal de uma aeronave não tripulada durante a qual não é possível a intervenção do piloto remoto no voo ou parte dele;
(8) Operação em Linha de Visada Visual (Visual Line of Sight – VLOS operation) significa a operação em condições meteorológicas visuais (VMC), na qual o piloto, sem o auxílio de observadores de RPA, mantém o contato visual direto (sem auxílio de lentes ou outros equipamentos) com a aeronave remotamente pilotada, de modo a conduzir o voo com as responsabilidades de manter as separações previstas com outras aeronaves, bem como de evitar colisões com aeronaves e obstáculos;
(9) Operação em Linha de Visada Visual Estendida (Extended Visual Line of Sight – EVLOS operation) significa a operação em VMC, na qual o piloto remoto, sem auxílio de lentes ou outros equipamentos, não é capaz de manter o contato visual direto com a RPA, necessitando dessa forma do auxílio de observadores de RPA para conduzir o voo com as responsabilidades de manter as separações previstas com outras aeronaves, bem como de evitar colisões com aeronaves e obstáculos, seguindo as mesmas regras de uma operação VLOS.;
(10) operação remotamente pilotada significa a operação normal de uma aeronave não tripulada durante a qual é possível a intervenção do piloto remoto em qualquer fase do voo, sendo admitida a possibilidade de voo autônomo somente em casos de falha do enlace de comando e controle, sendo obrigatória a presença constante do piloto remoto, mesmo no caso da referida falha do enlace de comando e controle;
(11) pessoa anuente significa uma pessoa cuja presença não é indispensável para que ocorra uma operação de aeronave não tripulada bem sucedida, mas que por vontade própria e por sua conta e risco concorde, expressamente, que uma aeronave não tripulada opere perto de sua própria pessoa ou de seus tutelados legais sem observar os critérios das áreas distantes de terceiros;
Nota: Considerando o princípio da autonomia e que o cidadão tem o direito de assumir e administrar o próprio risco quando somente ele ou seus tutelados legais (no caso de menores de idade) estarão expostos, a ANAC permite a operação de aeronaves não tripuladas perto de pessoas sem observar os critérios das áreas distantes de terceiros, desde que essas pessoas tenham dado expressamente a sua anuência, manifestando dessa forma a sua vontade. Contudo, a ANAC esclarece àqueles que livremente optarem por dar essa anuência que não é possível garantir um nível de risco aceitável de segurança operacional e que o controle da exposição a esse risco é de sua inteira responsabilidade.
(12) pessoa envolvida significa uma pessoa cuja presença é indispensável para que ocorra uma operação de aeronave não tripulada bem sucedida;
(13) piloto remoto é a pessoa que manipula os controles de voo de uma aeronave não tripulada; e
(14) Sistema de Aeronave Remotamente Pilotada (Remotely-Piloted Aircraft System – RPAS) significa a RPA, sua(s) RPS, o enlace de pilotagem e qualquer outro componente, como especificado no seu projeto. (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 4-5)
Relatório de Acompanhamento
Final
13
Além dessas definições, o tópico E94.5 faz a classificação do RPAS e da RPA. Esta classificação foi definida de acordo com o peso máximo de decolagem (PMD) que a RPA terá assim que sair do solo. Foram definidas três classes, sendo a Classe 1 para RPA com PMD acima de 150 kg, Classe 2 para a RPA com PMD maior que 25 kg e menor que 150 kg e pôr fim a Classe 3 que compreende RPA com PMD menor que 25 kg (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a). Como o VANT escolhido para o desenvolvimento desse projeto (Inspire 1, DJI) possui um PMD de 2,935 kg, o mesmo se encontra na Classe 3. Sendo assim, observou-se no RBAC-E n°94 as regras que são aplicadas na RPA de Classe 3.
O tópico E94.9 lista os requisitos para o piloto e observador de um RPA. Abaixo é listado as regras presentes nesses tópicos:
(a) Todos os pilotos remotos e observadores de RPA devem ser
maiores de 18 anos.
(b) Todos os pilotos remotos de RPA Classe 1 ou 2 devem possuir um Certificado Médico Aeronáutico (CMA) de 1ª, 2ª ou 5ª Classe válido, conforme o parágrafo 67.13(g) do RBAC nº 67, ou um CMA de 3ª Classe válido emitido pelo Comando da Aeronáutica segundo a ICA 63-15.
(c) Todos os pilotos remotos que atuarem em operações acima de 400 pés acima do nível do solo (Above Ground Level – AGL), ou que atuarem em operações de RPAS Classe 1 ou 2, devem possuir licença e habilitação emitida ou validada pela ANAC. A ANAC determinará, para cada tipo de operação, os critérios aceitáveis para a emissão da licença e habilitação apropriadas. (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 5)
Referente aos requisitos para ser um piloto remoto ou observador, para
RPA de classe 3, vale salientar o item “c”. Este item diz que para qualquer tipo de operação a mais de 120 metros do solo, não importando a classe, o piloto deve possuir habilitação e licença para este tipo de operação.
Um ponto importante que o tópico E94.11 possui é as regras referente a aeronavegabilidade civil. Neste tópico está escrito o seguinte texto:
(a) Somente é permitido operar uma aeronave não tripulada que esteja em condições aeronavegáveis.
(b) O piloto remoto em comando de uma aeronave não tripulada é responsável pela verificação de suas condições quanto à segurança do voo. Ele deve descontinuar o voo, assim que possível, quando ocorrerem problemas mecânicos, elétricos ou estruturais que comprometam a segurança da operação. (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 6)
As regras sobre aeronavegabilidade são aplicáveis para todas as classes.
Além disso, caso haja o descumprimento destas regras, o tópico E94.17 diz o seguinte:
(a) O não cumprimento dos requisitos estabelecidos neste Regulamento Especial será apurado e os infratores estarão sujeitos às sanções previstas na Lei nº 7.565/86 (CBA).
(b) Por medida cautelar, a ANAC poderá suspender temporariamente as operações quando houver suspeita ou evidência de descumprimento de requisitos deste Regulamento Especial que afetem significativamente o
Relatório de Acompanhamento
Final
14
nível de risco da operação. . (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 6)
Por fim, no capítulo referente às regras legais para utilização de RPAS, o tópico E94.19 apresenta os documentos necessários para que a operação dessas aeronaves seja permitida. Os seguintes documentos devem estar presentes na RPS:
(a) a Certidão de Cadastro, o Certificado de Matrícula ou o Certificado de Marca Experimental, conforme aplicável, todos válidos;
(b) o certificado de aeronavegabilidade válido, se aplicável; (c) o manual de voo; (d) a apólice de seguro ou o certificado de seguro com comprovante de
pagamento, dentro da validade, se aplicável; (e) documento que contém a avaliação de risco a que se referem os
parágrafos E94.103(f)(2) e E94.103(g)(2) deste Regulamento Especial; e (f) licença, habilitação e extrato do CMA, válidos e conforme aplicáveis
segundo este Regulamento Especial. Nota: os documentos acima listados abrangem somente os que são
requeridos possuir por parte da ANAC. Outros documentos podem ser necessários por parte do DECEA, da ANATEL, ou de outros órgãos competentes. (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 6-7)
Os documentos solicitados serão explicados no decorrer do texto. Um ponto importante a ser ressaltado é a solicitação de uma apólice de seguro. Como este é um tipo novo de seguro, será necessário consultar as empresas que oferecem seguros para verificar como é a contratação de um seguro deste tipo. Com a definição dos documentos necessários para operar RPAS, a próxima parte desta regulamentação define as regras gerais de voos para este tipo de aeronave, e as principais regras que se aplicam a este projeto são as seguintes:
(b) É proibida a operação autônoma de aeronaves não tripuladas.
(c) Todas as operações de aeronaves não tripuladas de uso não recreativo acima de 250 gramas de peso máximo de decolagem devem possuir seguro com cobertura de danos a terceiros, exceto as operações de aeronaves pertencentes a entidades controladas pelo Estado.
(d) A operação de aeromodelos de peso máximo de decolagem acima de 250 gramas somente é permitida pela ANAC em áreas distantes de terceiros, sob total responsabilidade do seu operador, conforme permitido o uso do espaço aéreo pelo DECEA.
(e) A operação de RPA de peso máximo de decolagem acima de 250 gramas somente é permitida pela ANAC em áreas distantes de terceiros, conforme permitido o uso do espaço aéreo pelo DECEA, sob total responsabilidade do seu operador, nas seguintes condições:
(1) se forem atendidas as demais exigências deste Regulamento Especial; e
(2) se houver uma avaliação de risco operacional, em formato aceitável, contemplando cada cenário operacional, que deve estar atualizada dentro dos últimos 12 meses calendáricos prévios à operação.
(g) A operação de RPA de peso máximo de decolagem acima de 250 gramas de um órgão de segurança pública, de polícia, de fiscalização tributária e aduaneira, de combate a vetores de transmissão de doenças, de defesa civil e/ou do corpo de bombeiros, ou de operador a serviço de um destes, somente é permitida pela ANAC, conforme permitido o uso do espaço aéreo pelo DECEA, sob total responsabilidade do órgão ou do operador, em quaisquer áreas, nas seguintes condições:
Relatório de Acompanhamento
Final
15
(1) se forem atendidas as demais exigências deste Regulamento Especial; e
(2) se houver uma avaliação de risco operacional, contemplando cada modalidade de operação, nos termos de Instrução Suplementar específica, que deve estar atualizada dentro dos últimos 12 meses calendáricos prévios à operação.
(h) Outros órgãos ou entidades controlados pelo Estado não mencionados no parágrafo (g) desta seção somente podem operar sob as condições do referido parágrafo (g) mediante autorização expressa da ANAC, sendo exigido que se demonstre:
(1) o interesse público da operação; e
(2) que haveria um risco maior à vida se a operação fosse realizada por meios alternativos.
(i) A operação de aeronaves não tripuladas até 250 gramas de peso máximo de decolagem é permitida pela ANAC, sob total responsabilidade do seu operador, conforme permitido o uso do espaço aéreo pelo DECEA, se forem atendidas as demais exigências deste Regulamento Especial.
Nota: o usuário deve sempre atentar que não basta cumprir as regras da ANAC para poder operar, mas é preciso cumprir também as regras do DECEA, da ANATEL e eventualmente de outras autoridades competentes, que podem criar restrições ou proibições operacionais além das regras da
ANAC.
(j) Operações de aeronaves não tripuladas fora dos critérios estabelecidos nos parágrafos (e), (f), (g), (h) e (i) desta seção são proibidas. (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 8)
Referente ao item “c”, no tópico de definições (E94.3), o termo autônomo é
referente a uma operação em que o piloto não pode interferir no voo da aeronave. Mas não é mencionado no regulamento se a operação de um voo semiautônomo, modo em que o piloto possa interferir no curso da aeronave é permitido. Neste caso, como o documento está em consulta pública, é necessário esperar a versão final para verificar se algo referente a este ponto será abrangido.
Além dessas regras, o tópico E94.105 do regulamento menciona que se deve efetuar o planejamento do voo com todas as informações necessárias. Como um VANT é operado remotamente, o item E94.107 define regras para o posto de trabalho onde o piloto se encontrará para operar essa aeronave. Os principais pontos desse item informam que sempre é necessário um piloto durante todas as fases do voo, sendo que, é permitida a troca de piloto durante a operação e cada piloto remoto só pode operar uma aeronave por vez. Outro tópico de suma importância para a operação de uma aeronave sem tripulação é referente à sua autonomia, sendo este ponto é tratado no item E94.109. Resumidamente, é descrito que em qualquer operação, deve-se avaliar a autonomia que o VANT possui para que o mesmo possa decolar e efetuar o seu pouso com segurança (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 9).
Como um VANT é um tipo especial de aeronave, a mesma não tem permissão para efetuar pousos ou decolagens em aeródromos públicos, sendo permitida essas operações somente com autorização da ANAC. Referente ainda a operações de decolagem e pouso, o regulamento especifica que o piloto remoto é totalmente responsável por essas operações, e que, estas operações devem ser efetuadas em local distante de terceiros e a área em que será efetuado o pouso ou decolagem não haja proibição para executar essa atividade. Como o regulamento ainda está em construção, o mesmo pode ser alterado para modificar as permissões referentes a pousos e decolagens. No caso de pouso de emergência, a área em que

Relatório de Acompanhamento
Final
16
se deve efetuar essa operação devem atender os requisitos mencionados (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 10)
A próxima seção desse regulamento é sobre o registro e marcas de uma RPA. Referente ao registro, o tópico E94.301 diz:
(a) Todas as RPA que sejam de um projeto autorizado ou de um tipo certificado devem ser registradas atendendo ao disposto na Resolução n° 293, de 9 de novembro de 2013, que dispõe sobre o Registro Aeronáutico Brasileiro. Essas aeronaves fazem jus a um Certificado de Marca Experimental ou a um Certificado de Matrícula, conforme aplicável.
(b) Exceto como previsto no parágrafo (d) desta seção, todo aeromodelo, ou RPA Classe 3 que opere somente em VLOS até 400 pés AGL, e que não seja de um projeto autorizado ou de um tipo certificado, deve ser cadastrado junto à ANAC e vinculado a uma pessoa (física ou jurídica, com CPF ou CNPJ no Brasil), que será a responsável legal pela aeronave.
(c) Exceto como previsto em (d), todo aeromodelo, ou RPA Classe 3 que opere somente em VLOS até 400 pés AGL, e que não seja de um projeto autorizado ou de um tipo certificado, deve ser identificado com o seu número de cadastro.
(1) A identificação deve ser mantida em uma condição legível para uma inspeção visual próxima e estar localizada:
(i) no lado externo da fuselagem da aeronave; ou (ii) em um compartimento interno da aeronave que possa ser
facilmente acessado sem necessidade de uso de qualquer ferramenta. (d) As aeronaves não tripuladas de peso máximo de decolagem de até
250 gramas não precisam ser cadastradas junto à ANAC ou identificadas. (e) O cadastro efetuado segundo esta seção será válido por 24 meses.
O cadastro não revalidado até 6 meses depois de vencido será inativado e não poderá mais ser revalidado (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 11)
Referente as marcas de identificação, o tópico E94.303 utiliza a RBAC 45,
que é o regulamento que possui as especificações que devem ser seguidas para se efetuar a marca de identificação da RPA. Os principais pontos são os seguintes:
(2) a placa de identificação da RPA requerida pelo parágrafo 45.11(a) do RBAC 45 estiver fixada:
(i) no lado externo da fuselagem da RPA, de forma legível; ou (ii) em um compartimento interno da RPA que possa ser facilmente
inspecionado; e (3) a RPS possuir uma placa de identificação à prova de fogo que:
(i) inclua a informação especificada no parágrafo (a) da seção 45.13 do RBAC 45, usando um método aprovado de marcação à prova de fogo; e
(ii) seja colocada de modo a ser improvável que seja danificada ou removida durante serviços normais, ou perdida ou destruída em caso de acidente; (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 11)
(2) a placa de identificação da RPA requerida pelo parágrafo 45.11(a) do RBAC 45 estiver fixada:
(i) no lado externo da fuselagem da RPA, de forma legível; ou (ii) em um compartimento interno da RPA que possa ser facilmente
inspecionado; e (3) a RPS possuir uma placa de identificação à prova de fogo que:
(i) inclua a informação especificada no parágrafo (a) da seção 45.13 do RBAC 45, usando um método aprovado de marcação à prova de fogo; e
Relatório de Acompanhamento
Final
17
(ii) seja colocada de modo a ser improvável que seja danificada ou removida durante serviços normais, ou perdida ou destruída em caso de acidente (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 11-12);
As questões de identificação da aeronave são de suma importância, pois como já mencionado no regulamento, esta identificação dever ser preservada, caso ocorra um acidente, para que este VANT possa ser identificado. Para que seja efetuado a identificação da aeronave, inicialmente é preciso efetuar o seu cadastro no Sistema de Aeronaves não Tripuladas - SISANT. Efetuado este cadastro, será gerado um prefixo para esta aeronave, sendo esta, a sua identificação (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017b).
A seção subsequente discute sobre a aprovação de projetos de RPAS. Neste projeto, não se tem a intenção de desenvolver um RPAS, e sim utilizar um que já esteja no mercado. Sendo assim, referente a esta seção, não se tem nenhum comentário a ser efetuado.
O próximo assunto que o regulamento trata é sobre a aeronavegabilidade continuada de RPAS. O primeiro tópico (E94.601) define que “O operador ou, na falta deste, o proprietário é o responsável pela conservação do RPAS em condições aeronavegáveis” (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 20), ou seja, na operação de uma RPA, sempre um responsável pelo sistema deve estar presente. Referente a aeronavegabilidade continuada em RPAS de classe 3 o regulamento especifica:
(a) Somente é permitido operar um RPAS Classe 3 destinada a operações BVLOS se:
(1) os procedimentos específicos recomendados pelo fabricante no manual de manutenção forem cumpridos;
(2) a pessoa que executa manutenção for devidamente treinada e qualificada; e
(3) todas as ações de manutenção forem registradas em cadernetas apropriadas. (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 23)
Comparado com as outras classes de RPAS, as regras para a classe 3 são mais simplificadas, facilitando assim o uso deste tipo de aeronave. Entretanto, é necessário atentar que a ANAC solicita que aeronaves classe 3 para voos em BVLOS sejam de um projeto autorizado pela ANAC (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017c, 2017d). Desta forma, para não necessitar desta autorização, é recomendado que somente voos VLOS e EVLOS sejam executados.
Por fim, a última seção do regulamento descreve as disposições finais. Como é de interesse somente a parte da regulamentação que dispõe regras para VANT de classe 3, o tópico E94.701 alega:
(a) De acordo com as disposições deste Regulamento Especial, para os efeitos de aplicação do art. 33 do Decreto-Lei n° 3.688, de 3 de outubro de 1941, entende-se como devidamente licenciado o operador que possuir:
(1) no caso de aeromodelo acima de 250 gramas de peso máximo de decolagem, a comprovação de cadastro emitido junto à ANAC e sua identificação na aeronave;
(2) no caso de RPA de peso máximo de decolagem superior a 250 gramas e até 25kg, em VLOS ou EVLOS até 400 pés AGL:
Relatório de Acompanhamento
Final
18
(i) a comprovação de cadastro emitido junto à ANAC e sua identificação na aeronave;
(ii) o seguro com cobertura de danos a terceiros, exceto das aeronaves pertencentes a entidades controladas pelo Estado;
(iii) documento que contém a avaliação de risco a que se referem os parágrafos E94.103(f)(2) e E94.103(g)(2) deste Regulamento Especial; e
(iv) manual de voo;
(3) no caso de RPA de peso máximo de decolagem superior a 250 gramas e até 25kg, em BVLOS até 400 pés AGL:
(i) o seguro com cobertura de danos a terceiros, exceto das aeronaves pertencentes a entidades controladas pelo Estado;
(ii) certificado de marca experimental ou certificado de matrícula;
(iii) certificado de aeronavegabilidade válido;
(iv) documento que contém a avaliação de risco a que se referem os parágrafos E94.103(f)(2) e E94.103(g)(2) deste Regulamento Especial; e
(v) manual de voo;
(4) no caso das demais RPA de peso máximo de decolagem superior a 250 gramas e até 25kg:
(i) o seguro com cobertura de danos a terceiros, exceto das aeronaves pertencentes a entidades controladas pelo Estado;
(ii) licença e habilitação emitida pela ANAC;
(iii) certificado de marca experimental ou certificado de matrícula;
(iv) certificado de aeronavegabilidade válido;
(v) documento que contém a avaliação de risco a que se referem os parágrafos E94.103(f)(2) e E94.103(g)(2) deste Regulamento Especial; e
(vi) manual de voo; ou
(5) no caso de RPA de peso máximo de decolagem acima de 25kg:
(i) o seguro com cobertura de danos a terceiros, exceto das aeronaves pertencentes a entidades controladas pelo Estado;
(ii) licença e habilitação emitida pela ANAC;
(iii) o CMA de 1ª, 2ª ou 5ª Classe emitido segundo o RBAC nº 67, ou o CMA de 3ª Classe válido emitido pelo Comando da Aeronáutica segundo a ICA 63-15;
(iv) certificado de marca experimental ou certificado de matrícula;
(v) certificado de aeronavegabilidade válido;
(vi) documento que contém a avaliação de risco a que se referem os parágrafos E94.103(f)(2) e E94.103(g)(2) deste Regulamento Especial; e (vii) manual de voo.
Relatório de Acompanhamento
Final
19
(b) Todos os operadores de aeromodelos e de RPA até 250 gramas de peso máximo de decolagem são considerados como devidamente licenciados, para os efeitos de aplicação do art. 33 do DecretoLei n° 3.688, de 3 de outubro de 1941, por força deste Regulamento Especial, sem necessidade de possuir documento emitido pela ANAC. Nota: os documentos acima listados abrangem somente os que são requeridos possuir por parte da ANAC. Outros documentos podem ser necessários por parte do DECEA, da ANATEL, ou de outros órgãos competentes. (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017a, p. 24-26)
Como todo VANT possui um sistema de rádio transmissão, a Agência
Nacional de Telecomunicações – ANATEL, solicita que todo equipamento seja homologado e registrado no órgão (PORTAL BRASIL, 2017; TELECOMUNICAÇÕES, 2016). Assim sendo, como a aeronave escolhida já é homologada por este órgão, não será necessário efetuar nenhuma solicitação de homologação. Caso a mesma não fosse homologada, seria necessário efetuar esse procedimento, de forma que atendesse as solicitações da ANATEL.
Além de seguir as regras da ANAC, possuir sistemas de radiofrequência homologados e registrados, é necessário efetuar a solicitação de espaço aéreo através do sistema de Solicitação de Autorização de Voos com RPAS – SARPAS que é gerenciado pelo Departamento de controle do Espaço Aéreo – DECEA (DEPARTAMENTO DE CONTROLE DO ESPAÇO AÉREO, 2017a). Neste sistema, inicialmente o operador deve efetuar o seu cadastro e após este ser aprovado, as aeronaves que serão utilizadas devem ser cadastradas. Com a etapa de cadastros concluídas, o piloto deverá solicitar acesso ao espaço aéreo através deste sistema.
Seguindo-se todas as regras presentes nos regulamentos e com todos os documentos em dia, todos os voos executados com a aeronave serão efetuados de acordo com a lei.
3.3 Estudo de rotas e pontos de interesse
INÍCIO: 1º mês
TÉRMINO: 6º mês
Descrição da Etapa
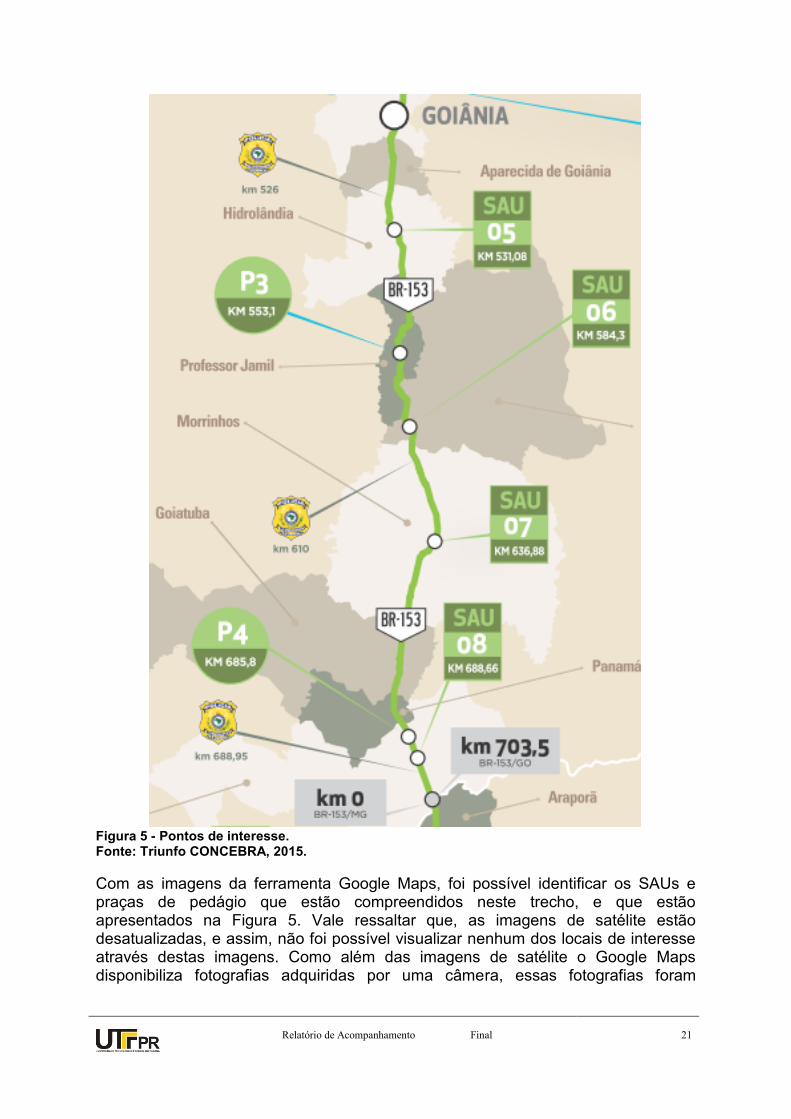
Realizar mapeamento geográfico das rodovias para determinar rotas de voos. O indicador desta etapa é um documento indicando as rotas de voos para mapeamento de pontos de interesse. Resultado Para o desenvolvimento desta etapa, solicitou-se ao responsável pelo projeto na empresa Triunfo CONCEBRA, os pontos de interesse da empresa, para que assim, fosse efetuado o mapeamento destes locais bem como se iniciasse a discussão sobre os parâmetros a serem monitorados. O mapa com os pontos de interesse é apresentado na Figura 5.
Relatório de Acompanhamento
Final
20
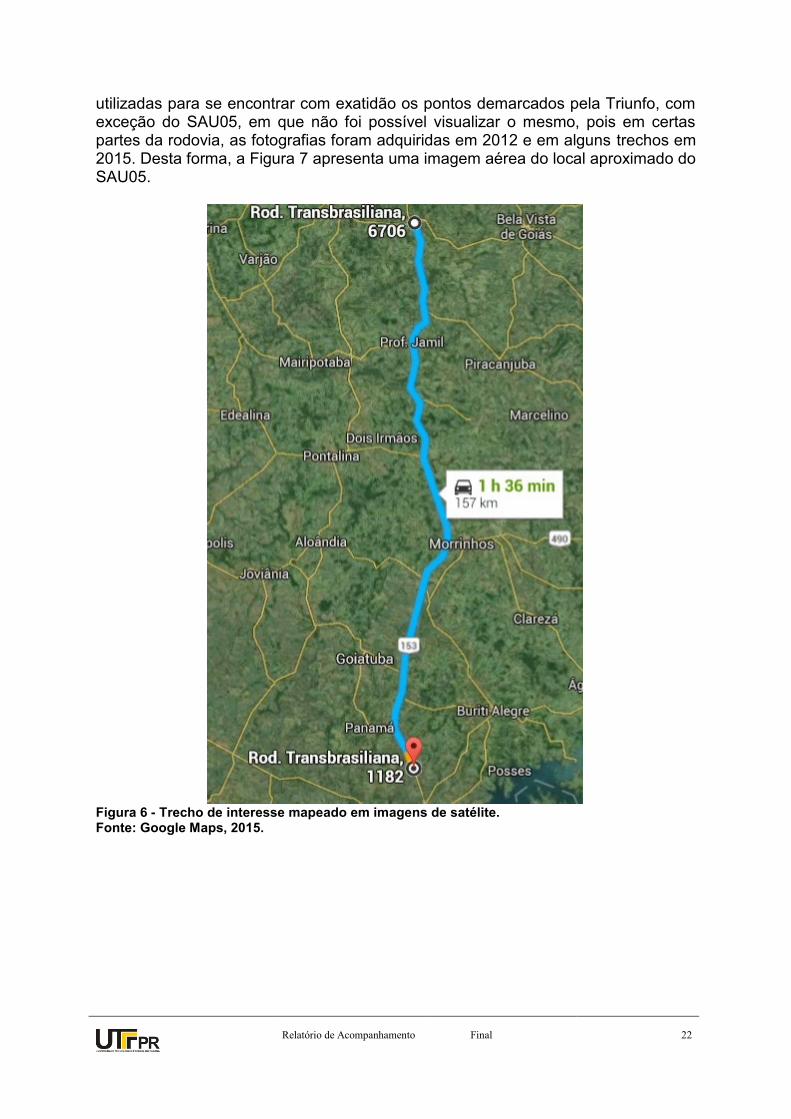
Os pontos estão compreendidos entre o SAU05 e SAU08. Nessa primeira fase, foi empregada a ferramenta para visualização de mapas da Google Inc. para a obtenção de imagens de satélite dos trechos e locais. Com os pontos localizados, os mesmos foram marcados e são apresentados na Figura 6. Analisando-se a Figura 6, verifica-se que o trecho compreendido entre os pontos SAU05 e SAU08 está contido em grande parte na área rural. Essa característica deste trecho, poderá facilitar para os voos que a aeronave deverá efetuar e também as imagens que serão adquiridas, pois em áreas urbanas, pode ocorrer de a rodovia possuir muitas árvores ou rede elétrica que podem inserir objetos indesejados na imagem, e com isso, prejudicar a identificação de pontos específicos de interesse em uma imagem aérea de uma rodovia.
Relatório de Acompanhamento
Final
21
Figura 5 - Pontos de interesse. Fonte: Triunfo CONCEBRA, 2015.
Com as imagens da ferramenta Google Maps, foi possível identificar os SAUs e praças de pedágio que estão compreendidos neste trecho, e que estão apresentados na Figura 5. Vale ressaltar que, as imagens de satélite estão desatualizadas, e assim, não foi possível visualizar nenhum dos locais de interesse através destas imagens. Como além das imagens de satélite o Google Maps disponibiliza fotografias adquiridas por uma câmera, essas fotografias foram
Relatório de Acompanhamento
Final
22
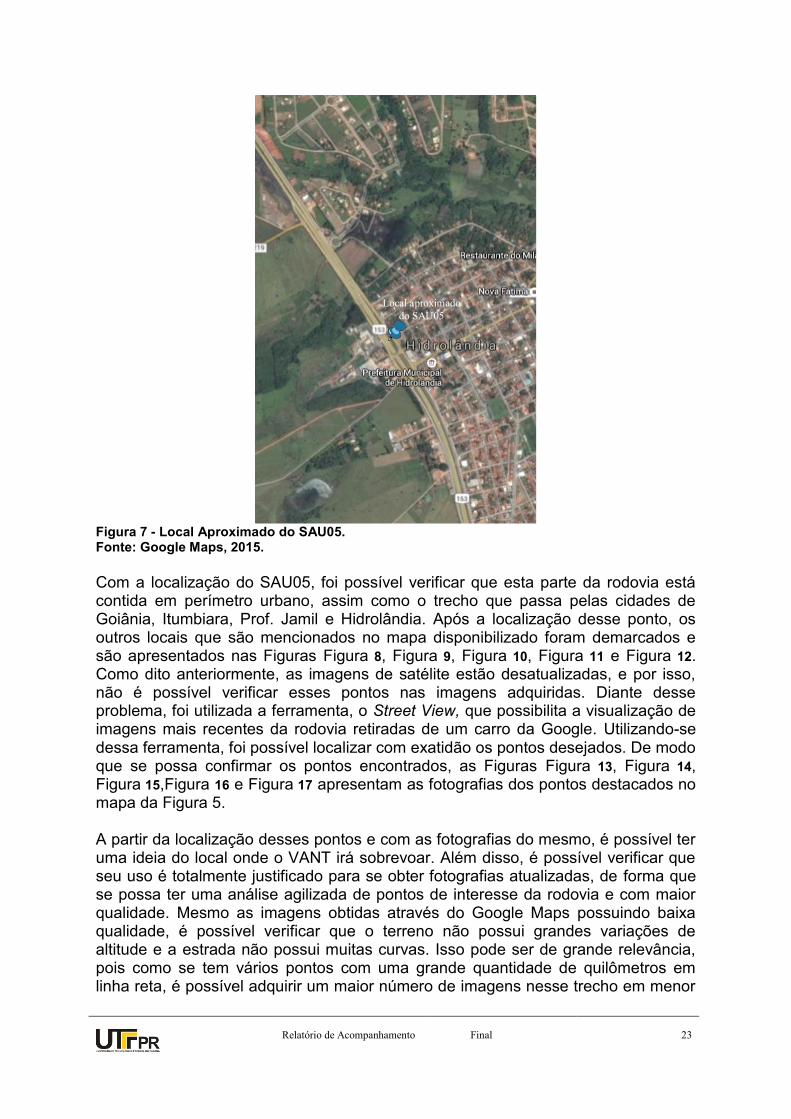
utilizadas para se encontrar com exatidão os pontos demarcados pela Triunfo, com exceção do SAU05, em que não foi possível visualizar o mesmo, pois em certas partes da rodovia, as fotografias foram adquiridas em 2012 e em alguns trechos em 2015. Desta forma, a Figura 7 apresenta uma imagem aérea do local aproximado do SAU05.
Figura 6 - Trecho de interesse mapeado em imagens de satélite. Fonte: Google Maps, 2015.
Relatório de Acompanhamento
Final
23
Local aproximado
do SAU05
Figura 7 - Local Aproximado do SAU05. Fonte: Google Maps, 2015.
Com a localização do SAU05, foi possível verificar que esta parte da rodovia está contida em perímetro urbano, assim como o trecho que passa pelas cidades de Goiânia, Itumbiara, Prof. Jamil e Hidrolândia. Após a localização desse ponto, os outros locais que são mencionados no mapa disponibilizado foram demarcados e são apresentados nas Figuras Figura 8, Figura 9, Figura 10, Figura 11 e Figura 12. Como dito anteriormente, as imagens de satélite estão desatualizadas, e por isso, não é possível verificar esses pontos nas imagens adquiridas. Diante desse problema, foi utilizada a ferramenta, o Street View, que possibilita a visualização de imagens mais recentes da rodovia retiradas de um carro da Google. Utilizando-se dessa ferramenta, foi possível localizar com exatidão os pontos desejados. De modo que se possa confirmar os pontos encontrados, as Figuras Figura 13, Figura 14, Figura 15,Figura 16 e Figura 17 apresentam as fotografias dos pontos destacados no mapa da Figura 5. A partir da localização desses pontos e com as fotografias do mesmo, é possível ter uma ideia do local onde o VANT irá sobrevoar. Além disso, é possível verificar que seu uso é totalmente justificado para se obter fotografias atualizadas, de forma que se possa ter uma análise agilizada de pontos de interesse da rodovia e com maior qualidade. Mesmo as imagens obtidas através do Google Maps possuindo baixa qualidade, é possível verificar que o terreno não possui grandes variações de altitude e a estrada não possui muitas curvas. Isso pode ser de grande relevância, pois como se tem vários pontos com uma grande quantidade de quilômetros em linha reta, é possível adquirir um maior número de imagens nesse trecho em menor
Relatório de Acompanhamento
Final
24
tempo, uma vez que não é necessário efetuar a todo momento o direcionamento da câmera para se obter a melhor imagem.
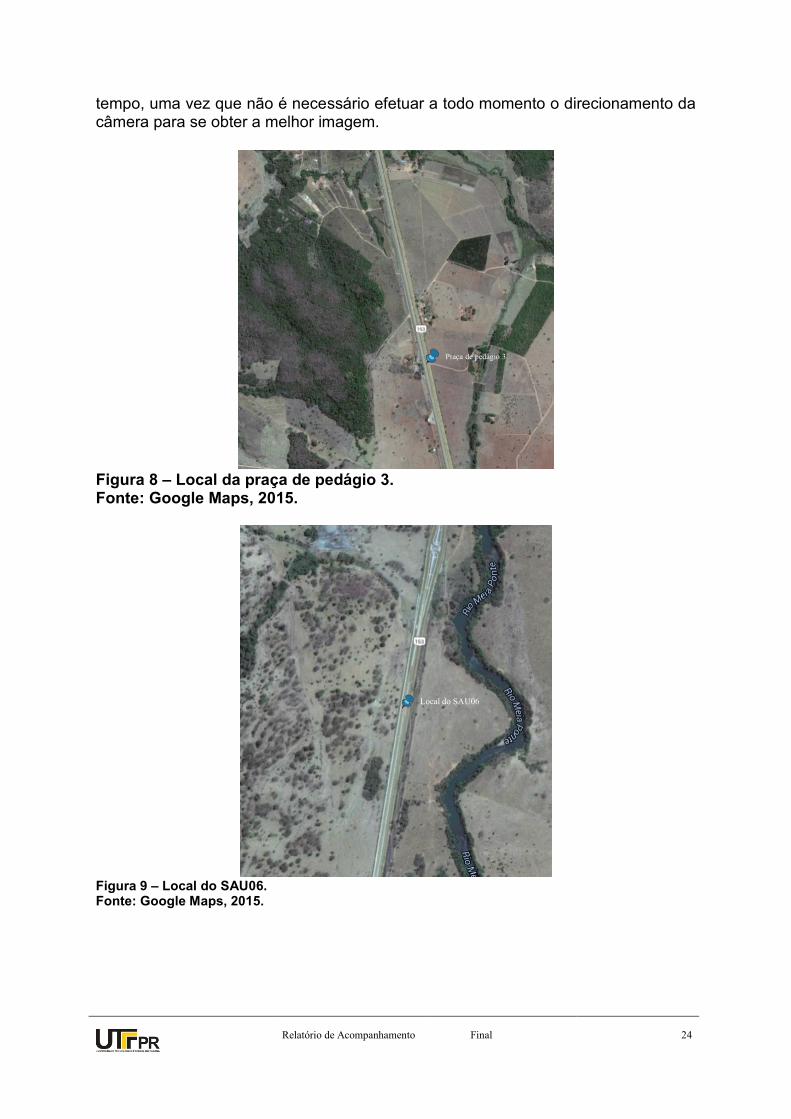
Praça de pedágio 3
Figura 8 – Local da praça de pedágio 3. Fonte: Google Maps, 2015.
Local do SAU06
Figura 9 – Local do SAU06. Fonte: Google Maps, 2015.
Relatório de Acompanhamento
Final
25
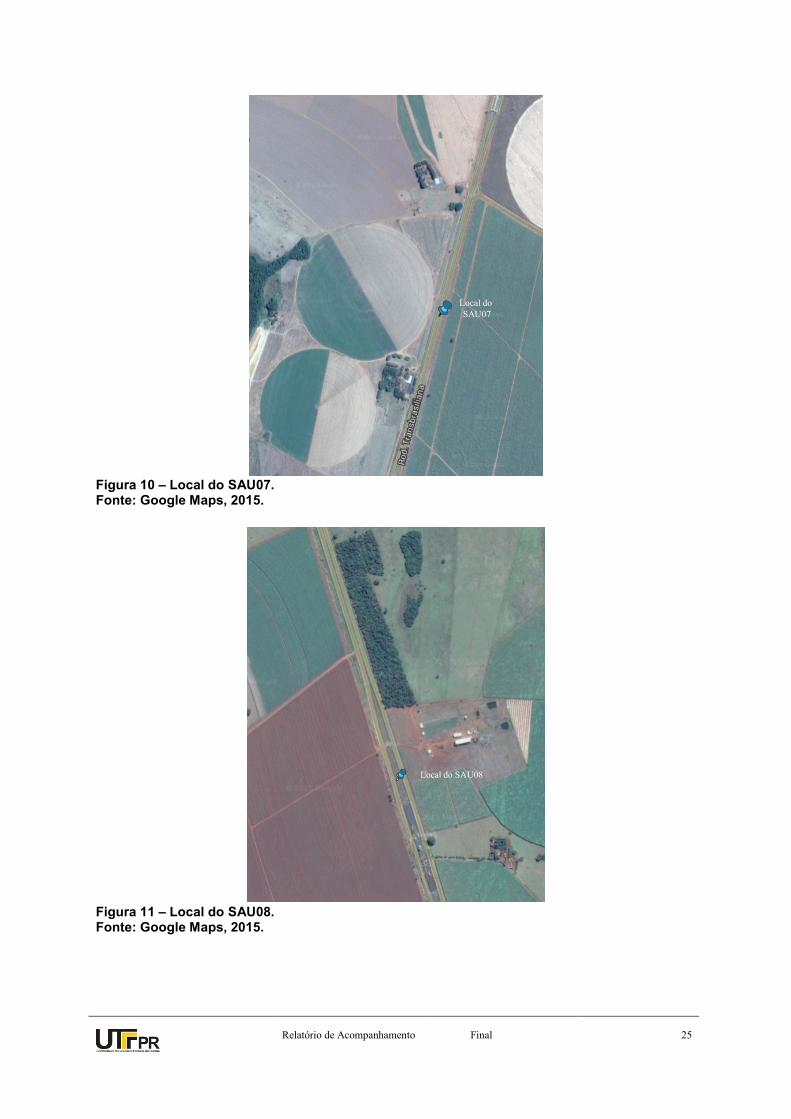
Local do
SAU07
Figura 10 – Local do SAU07. Fonte: Google Maps, 2015.
Local do SAU08
Figura 11 – Local do SAU08. Fonte: Google Maps, 2015.
Relatório de Acompanhamento
Final
26
Praça de pedágio 4
Figura 12 – Local da praça de pedágio 4. Fonte: Google Maps, 2015.
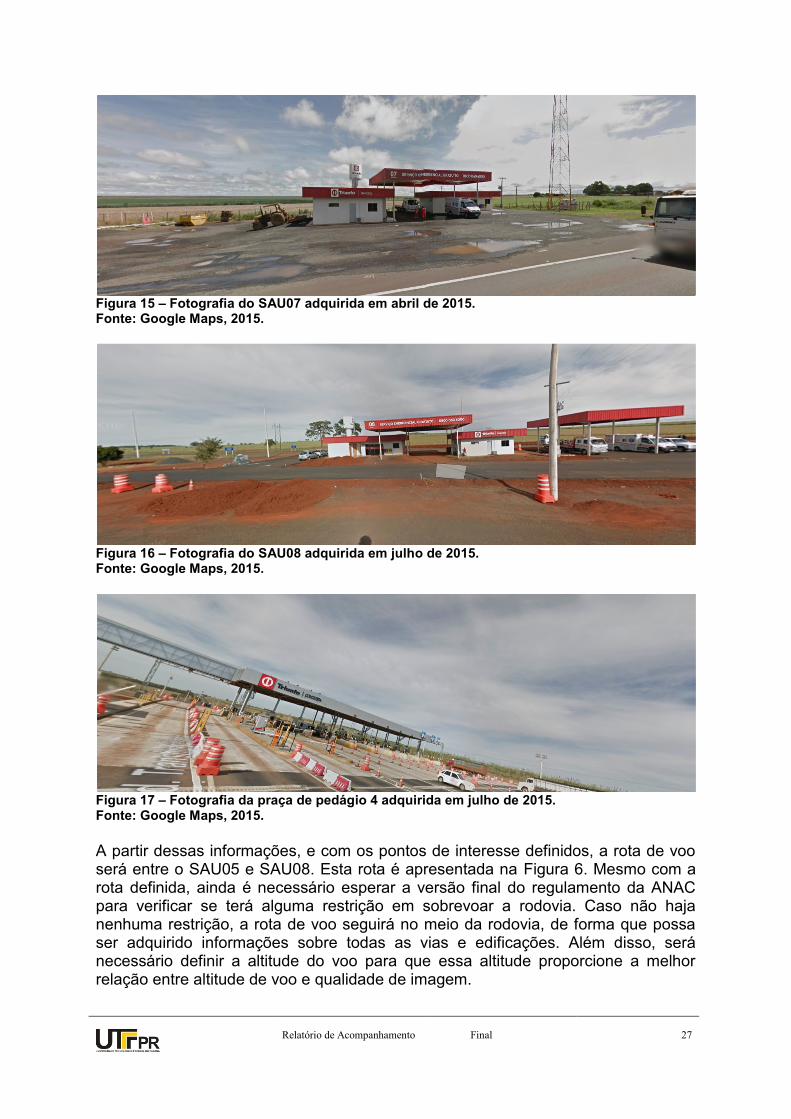
Figura 13 – Fotografia da praça de pedágio 3 adquirida em agosto de 2015. Fonte: Google Maps, 2015.
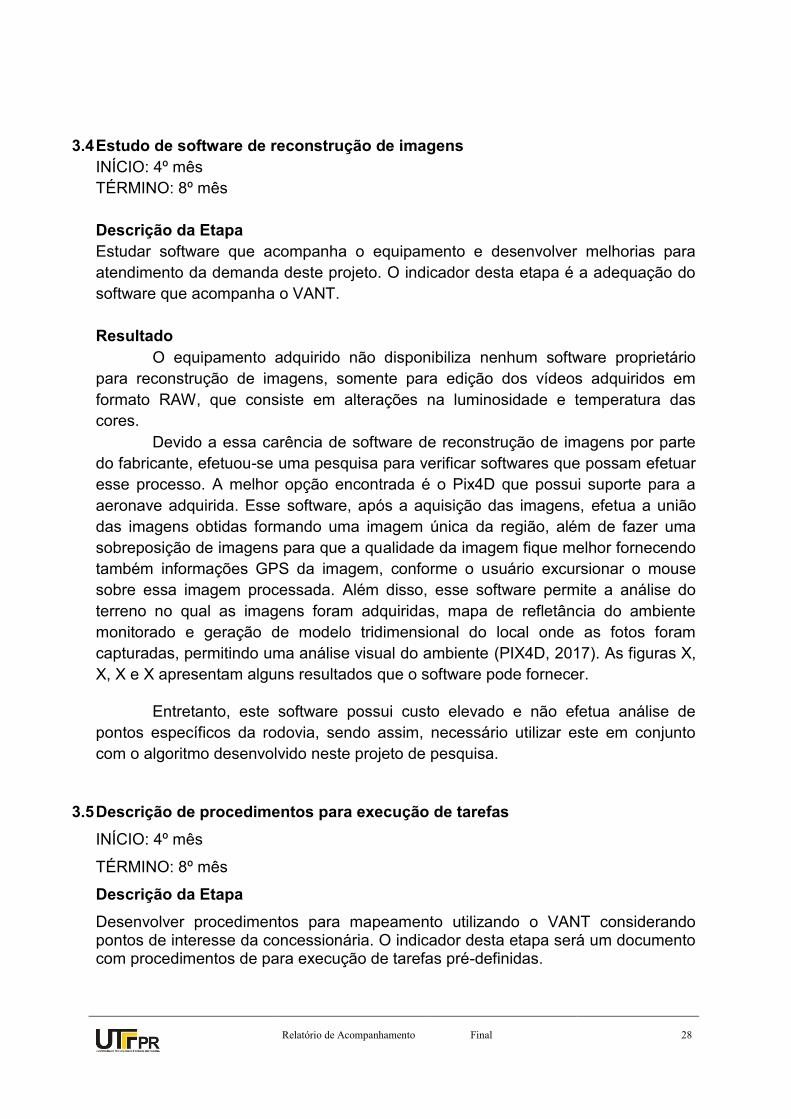
Figura 14 – Fotografia do SAU06 adquirida em julho de 2015. Fonte: Google Maps, 2015.
Relatório de Acompanhamento
Final
27
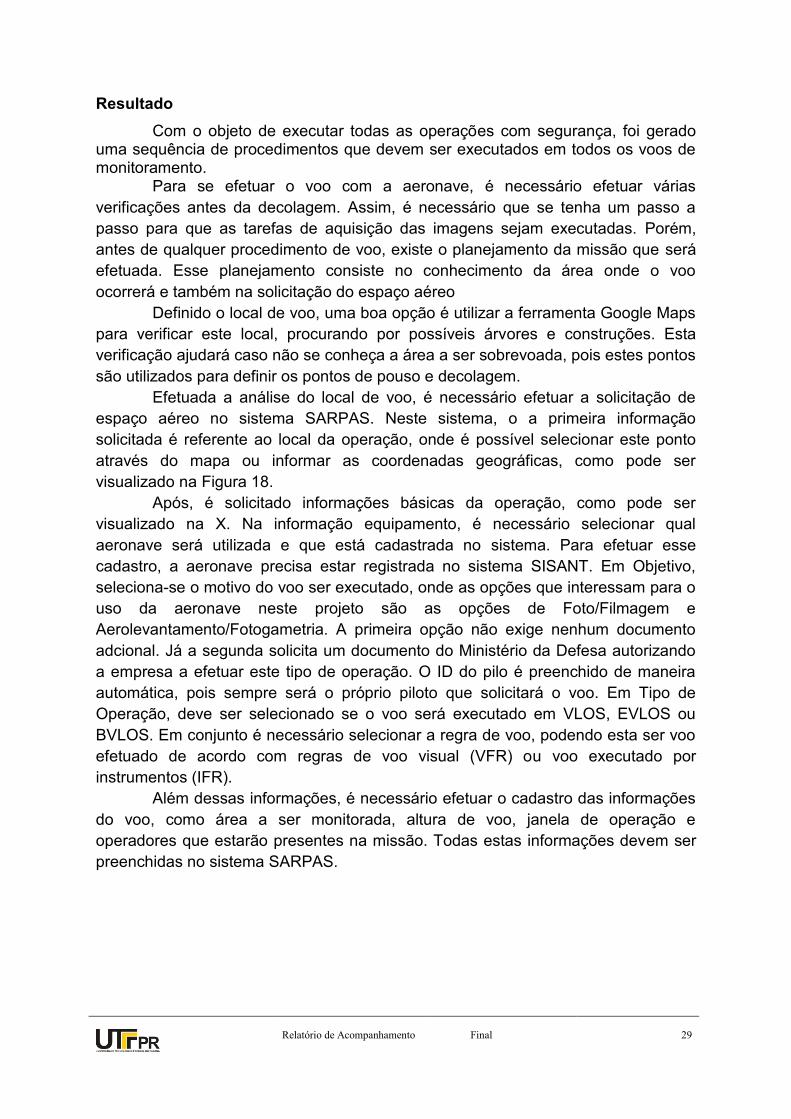
Figura 15 – Fotografia do SAU07 adquirida em abril de 2015. Fonte: Google Maps, 2015.
Figura 16 – Fotografia do SAU08 adquirida em julho de 2015. Fonte: Google Maps, 2015.
Figura 17 – Fotografia da praça de pedágio 4 adquirida em julho de 2015. Fonte: Google Maps, 2015.
A partir dessas informações, e com os pontos de interesse definidos, a rota de voo será entre o SAU05 e SAU08. Esta rota é apresentada na Figura 6. Mesmo com a rota definida, ainda é necessário esperar a versão final do regulamento da ANAC para verificar se terá alguma restrição em sobrevoar a rodovia. Caso não haja nenhuma restrição, a rota de voo seguirá no meio da rodovia, de forma que possa ser adquirido informações sobre todas as vias e edificações. Além disso, será necessário definir a altitude do voo para que essa altitude proporcione a melhor relação entre altitude de voo e qualidade de imagem.
Relatório de Acompanhamento
Final
28
3.4 Estudo de software de reconstrução de imagens
INÍCIO: 4º mês
TÉRMINO: 8º mês
Descrição da Etapa
Estudar software que acompanha o equipamento e desenvolver melhorias para
atendimento da demanda deste projeto. O indicador desta etapa é a adequação do
software que acompanha o VANT.
Resultado
O equipamento adquirido não disponibiliza nenhum software proprietário
para reconstrução de imagens, somente para edição dos vídeos adquiridos em
formato RAW, que consiste em alterações na luminosidade e temperatura das
cores.
Devido a essa carência de software de reconstrução de imagens por parte
do fabricante, efetuou-se uma pesquisa para verificar softwares que possam efetuar
esse processo. A melhor opção encontrada é o Pix4D que possui suporte para a
aeronave adquirida. Esse software, após a aquisição das imagens, efetua a união
das imagens obtidas formando uma imagem única da região, além de fazer uma
sobreposição de imagens para que a qualidade da imagem fique melhor fornecendo
também informações GPS da imagem, conforme o usuário excursionar o mouse
sobre essa imagem processada. Além disso, esse software permite a análise do
terreno no qual as imagens foram adquiridas, mapa de refletância do ambiente
monitorado e geração de modelo tridimensional do local onde as fotos foram
capturadas, permitindo uma análise visual do ambiente (PIX4D, 2017). As figuras X,
X, X e X apresentam alguns resultados que o software pode fornecer.
Entretanto, este software possui custo elevado e não efetua análise de
pontos específicos da rodovia, sendo assim, necessário utilizar este em conjunto
com o algoritmo desenvolvido neste projeto de pesquisa.
3.5 Descrição de procedimentos para execução de tarefas
INÍCIO: 4º mês
TÉRMINO: 8º mês
Descrição da Etapa
Desenvolver procedimentos para mapeamento utilizando o VANT considerando pontos de interesse da concessionária. O indicador desta etapa será um documento com procedimentos de para execução de tarefas pré-definidas.
Relatório de Acompanhamento
Final
29
Resultado
Com o objeto de executar todas as operações com segurança, foi gerado uma sequência de procedimentos que devem ser executados em todos os voos de monitoramento.
Para se efetuar o voo com a aeronave, é necessário efetuar várias
verificações antes da decolagem. Assim, é necessário que se tenha um passo a
passo para que as tarefas de aquisição das imagens sejam executadas. Porém,
antes de qualquer procedimento de voo, existe o planejamento da missão que será
efetuada. Esse planejamento consiste no conhecimento da área onde o voo
ocorrerá e também na solicitação do espaço aéreo
Definido o local de voo, uma boa opção é utilizar a ferramenta Google Maps
para verificar este local, procurando por possíveis árvores e construções. Esta
verificação ajudará caso não se conheça a área a ser sobrevoada, pois estes pontos
são utilizados para definir os pontos de pouso e decolagem.
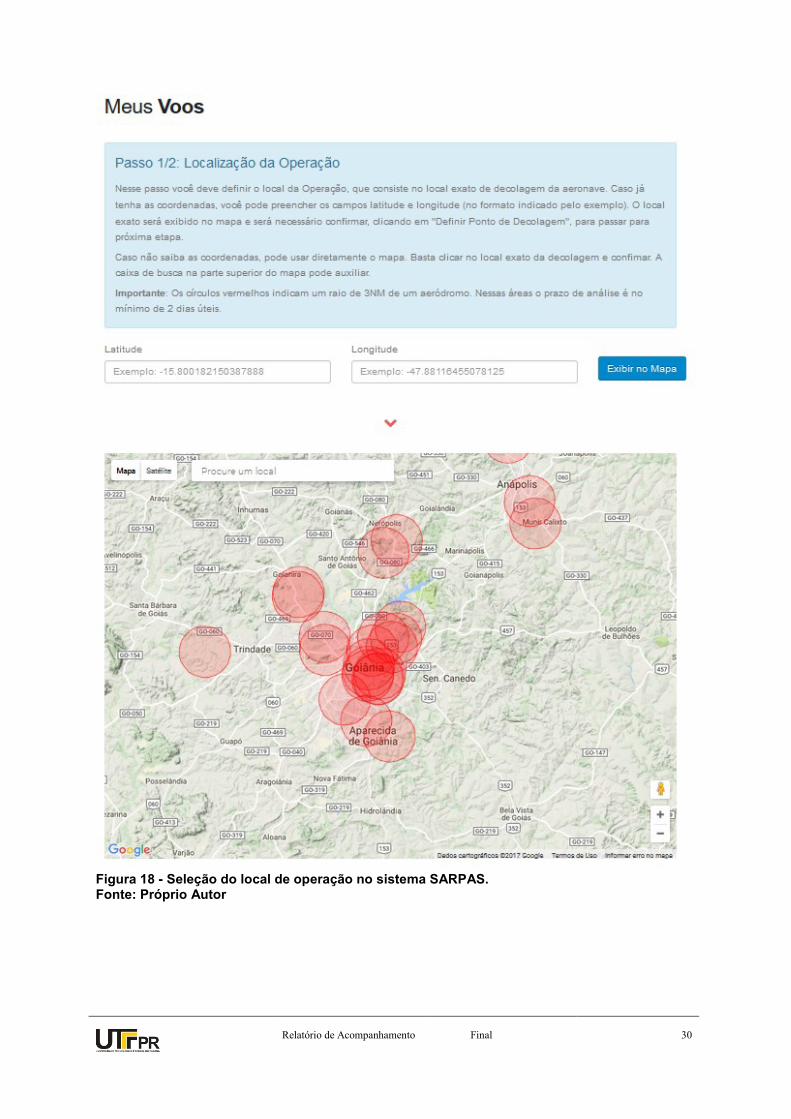
Efetuada a análise do local de voo, é necessário efetuar a solicitação de
espaço aéreo no sistema SARPAS. Neste sistema, o a primeira informação
solicitada é referente ao local da operação, onde é possível selecionar este ponto
através do mapa ou informar as coordenadas geográficas, como pode ser
visualizado na Figura 18.
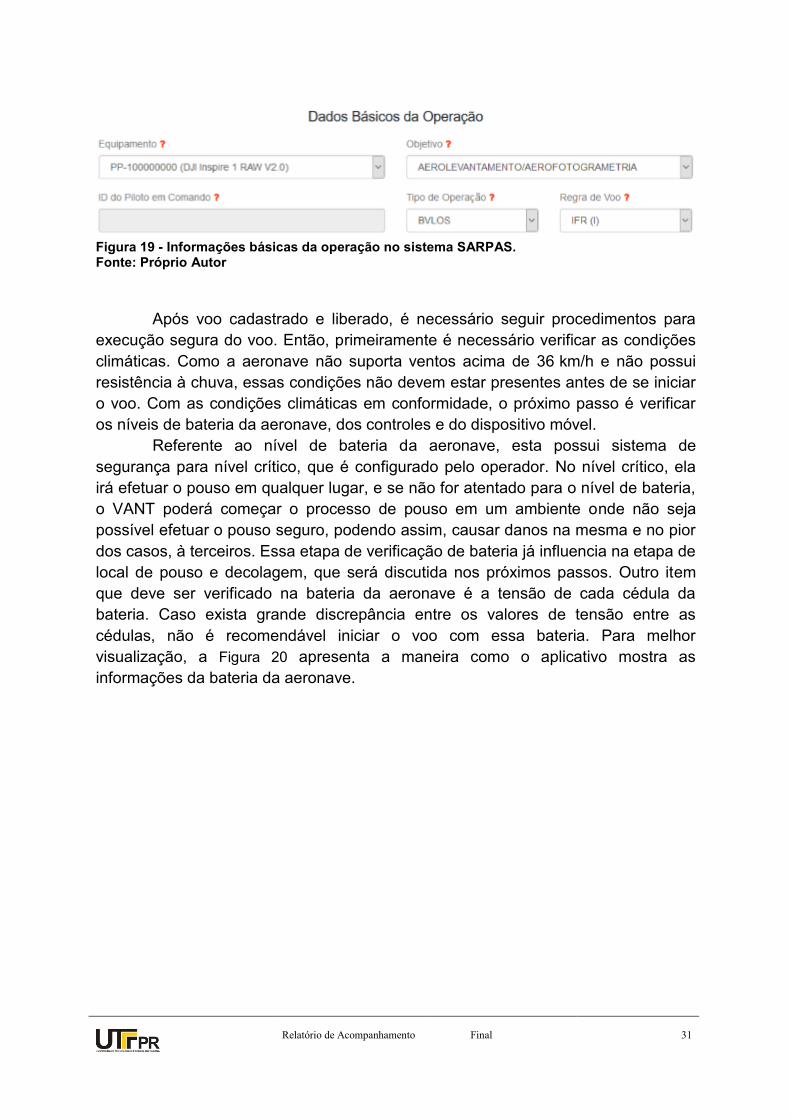
Após, é solicitado informações básicas da operação, como pode ser
visualizado na X. Na informação equipamento, é necessário selecionar qual
aeronave será utilizada e que está cadastrada no sistema. Para efetuar esse
cadastro, a aeronave precisa estar registrada no sistema SISANT. Em Objetivo,
seleciona-se o motivo do voo ser executado, onde as opções que interessam para o
uso da aeronave neste projeto são as opções de Foto/Filmagem e
Aerolevantamento/Fotogametria. A primeira opção não exige nenhum documento
adcional. Já a segunda solicita um documento do Ministério da Defesa autorizando
a empresa a efetuar este tipo de operação. O ID do pilo é preenchido de maneira
automática, pois sempre será o próprio piloto que solicitará o voo. Em Tipo de
Operação, deve ser selecionado se o voo será executado em VLOS, EVLOS ou
BVLOS. Em conjunto é necessário selecionar a regra de voo, podendo esta ser voo
efetuado de acordo com regras de voo visual (VFR) ou voo executado por
instrumentos (IFR).
Além dessas informações, é necessário efetuar o cadastro das informações
do voo, como área a ser monitorada, altura de voo, janela de operação e
operadores que estarão presentes na missão. Todas estas informações devem ser
preenchidas no sistema SARPAS.
Relatório de Acompanhamento
Final
30
Figura 18 - Seleção do local de operação no sistema SARPAS. Fonte: Próprio Autor
Relatório de Acompanhamento
Final
31
Figura 19 - Informações básicas da operação no sistema SARPAS. Fonte: Próprio Autor
Após voo cadastrado e liberado, é necessário seguir procedimentos para
execução segura do voo. Então, primeiramente é necessário verificar as condições
climáticas. Como a aeronave não suporta ventos acima de 36 km/h e não possui
resistência à chuva, essas condições não devem estar presentes antes de se iniciar
o voo. Com as condições climáticas em conformidade, o próximo passo é verificar
os níveis de bateria da aeronave, dos controles e do dispositivo móvel.
Referente ao nível de bateria da aeronave, esta possui sistema de
segurança para nível crítico, que é configurado pelo operador. No nível crítico, ela
irá efetuar o pouso em qualquer lugar, e se não for atentado para o nível de bateria,
o VANT poderá começar o processo de pouso em um ambiente onde não seja
possível efetuar o pouso seguro, podendo assim, causar danos na mesma e no pior
dos casos, à terceiros. Essa etapa de verificação de bateria já influencia na etapa de
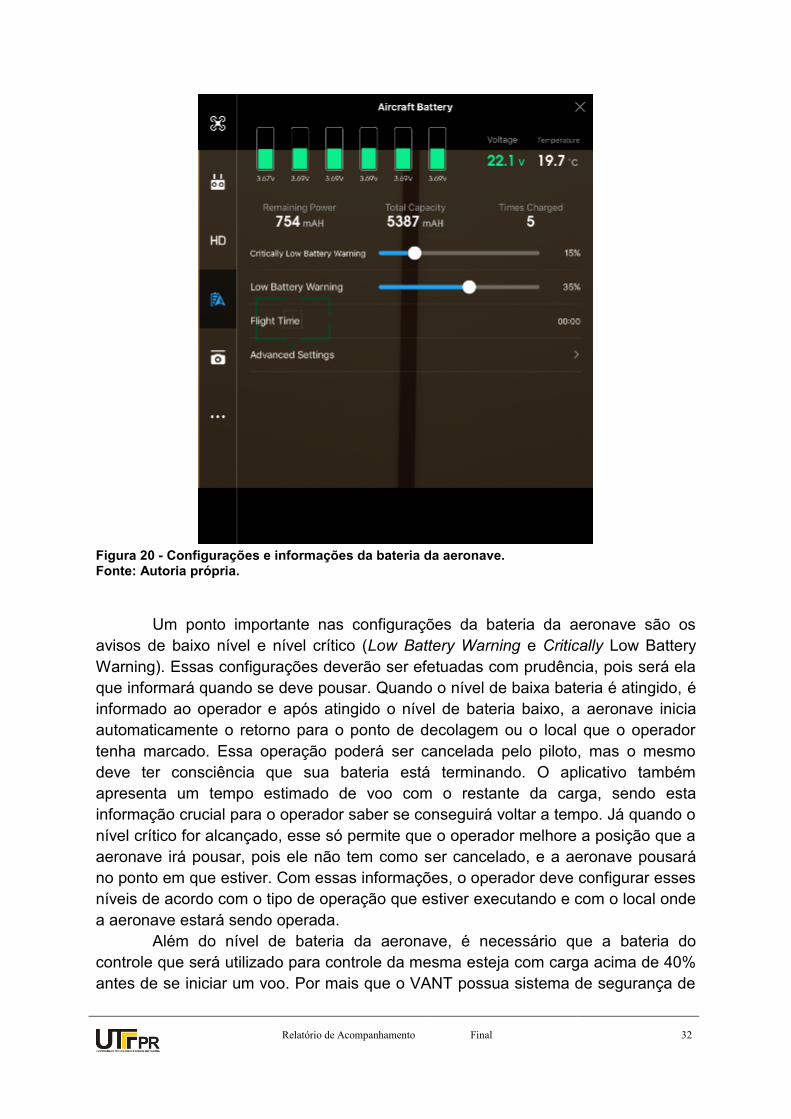
local de pouso e decolagem, que será discutida nos próximos passos. Outro item
que deve ser verificado na bateria da aeronave é a tensão de cada cédula da
bateria. Caso exista grande discrepância entre os valores de tensão entre as
cédulas, não é recomendável iniciar o voo com essa bateria. Para melhor
visualização, a Figura 20 apresenta a maneira como o aplicativo mostra as
informações da bateria da aeronave.
Relatório de Acompanhamento
Final
32
Figura 20 - Configurações e informações da bateria da aeronave. Fonte: Autoria própria.
Um ponto importante nas configurações da bateria da aeronave são os
avisos de baixo nível e nível crítico (Low Battery Warning e Critically Low Battery
Warning). Essas configurações deverão ser efetuadas com prudência, pois será ela
que informará quando se deve pousar. Quando o nível de baixa bateria é atingido, é
informado ao operador e após atingido o nível de bateria baixo, a aeronave inicia
automaticamente o retorno para o ponto de decolagem ou o local que o operador
tenha marcado. Essa operação poderá ser cancelada pelo piloto, mas o mesmo
deve ter consciência que sua bateria está terminando. O aplicativo também
apresenta um tempo estimado de voo com o restante da carga, sendo esta
informação crucial para o operador saber se conseguirá voltar a tempo. Já quando o
nível crítico for alcançado, esse só permite que o operador melhore a posição que a
aeronave irá pousar, pois ele não tem como ser cancelado, e a aeronave pousará
no ponto em que estiver. Com essas informações, o operador deve configurar esses
níveis de acordo com o tipo de operação que estiver executando e com o local onde
a aeronave estará sendo operada.
Além do nível de bateria da aeronave, é necessário que a bateria do
controle que será utilizado para controle da mesma esteja com carga acima de 40%
antes de se iniciar um voo. Por mais que o VANT possua sistema de segurança de

Relatório de Acompanhamento
Final
33
retorno automático, quando se perde a comunicação com o controle, esse retorno
tem uma velocidade reduzida, além de o operador não ter mais as informações na
tela do dispositivo. Além disso, caso ocorra alguma emergência no pouso da
mesma, não será possível interferir devido à falta de carga na bateria. Esse nível de
bateria pode ser visualizado no aplicativo de navegação, ou pelos LEDs que o
controle possui. Por fim, referente a bateria do dispositivo móvel, essa também deve
estar carregada para que se possa visualizar as informações da aeronave, como
local atual, distância, altitude e nível de bateria, que são de extrema importância
para que o operador efetue um voo com segurança.
Após a verificação dos níveis de bateria dos aparatos, é necessário
configurar o VANT para modo de voo, pois o mesmo fica recolhido para transporte,
sendo necessário assim, antes de iniciar o voo, retirar a aeronave desse modo, e ao
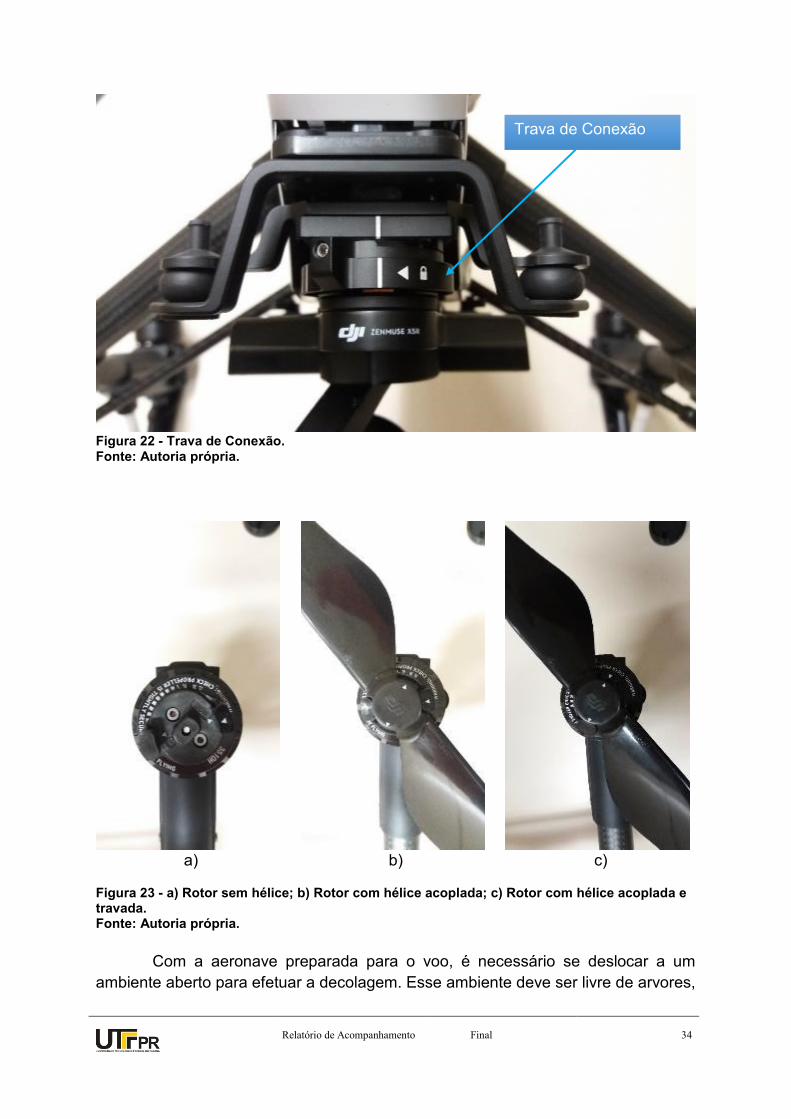
final retornar ao mesmo. Com o drone no modo voo, é necessário acoplar a câmera.
O VANT possui uma trava de conexão e duas travas que fixam de forma mais
segura a câmera. Essas travas são apresentas nas figuras Figura 21 e Figura 22.
Com a câmera conectada, é necessário inserir as hélices, que também
possuem travas. A Figura 23 apresenta o rotor sem a hélice e também um rotor com
hélice travada. É necessário que as setas estejam alinhadas e que as cores sejam
as mesmas.
Figura 21 - Trava de segurança da câmera. Fonte: Autoria própria.
Trava de Segurança
Relatório de Acompanhamento
Final
34
Figura 22 - Trava de Conexão. Fonte: Autoria própria.
a) b) c)
Figura 23 - a) Rotor sem hélice; b) Rotor com hélice acoplada; c) Rotor com hélice acoplada e travada. Fonte: Autoria própria.
Com a aeronave preparada para o voo, é necessário se deslocar a um
ambiente aberto para efetuar a decolagem. Esse ambiente deve ser livre de arvores,
Trava de Conexão

Relatório de Acompanhamento
Final
35
torres de transmissão, cabos e outros objetos com que a aeronave possa se chocar.
Como no modo de pouso de retorno automático pode acontecer um erro de 1,8
metros para qualquer lado, é necessário que esse ambiente seja amplo, para evitar
acidentes.
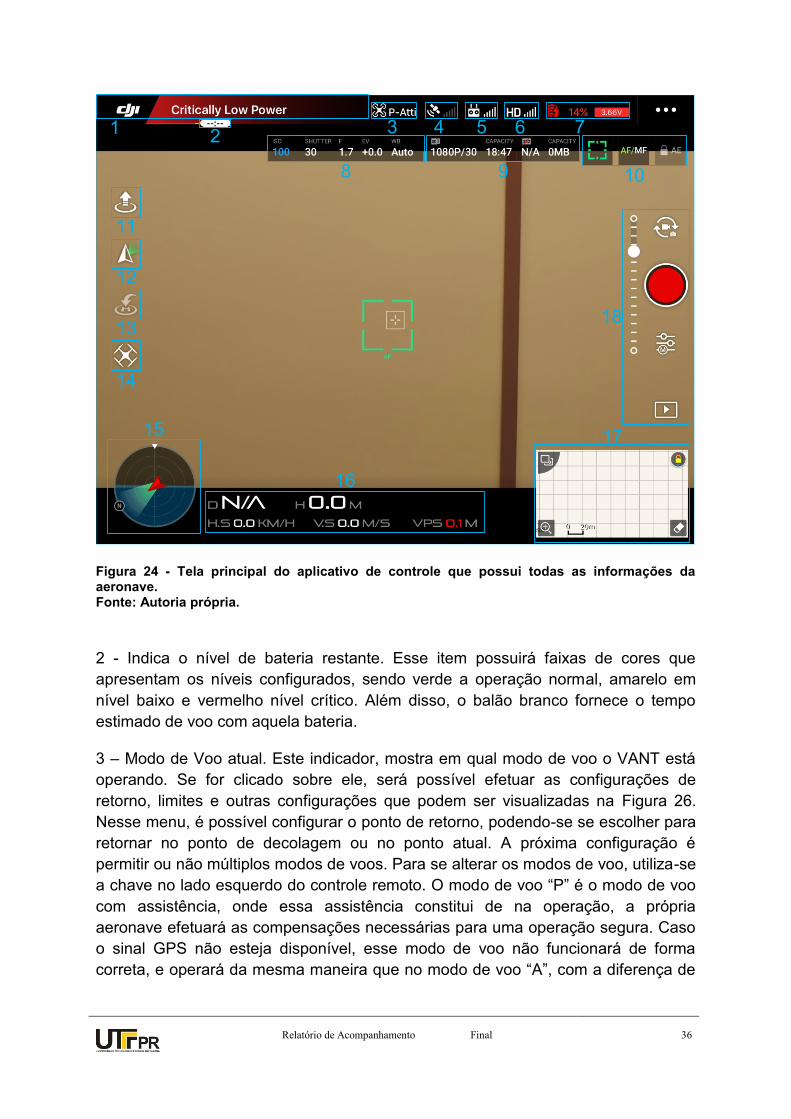
Após esse procedimento a aeronave e o controle são ligados e verifica-se o
status de todos os aparatos em busca de anormalidades. A Figura 24 apresenta a
tela que o operador encontrará. Para melhor explicação, estão enumerados os
principais pontos dessa tela. Referente a Figura 24, abaixo é fornecida uma
descrição de cada item.
1 - Indica o Estado Atual do Sistema ao todo. Esse item poderá apresentar 3 cores:
vermelho, amarelo e verde. Vermelho indicará algum problema, como nível crítico
de bateria, erro na bussola, perda de sinal, entre outros. Quando essa barra
permanecer nessa cor, é necessária maior atenção. Se estiver vermelha antes do
voo, o próprio aplicativo não permitirá a decolagem, e informará qual a causa do
problema. Já a cor amarela indicará algum risco na operação. Nesse caso será
permitido o voo, mas será dado um aviso que problemas podem acontecer. Essa
barra ficará amarela quando, por exemplo, o sinal de GPS não estiver estável, pois
sem GPS a aeronave opera sem modos de compensação, o que exige muita
experiência e será explicado melhor nos modos de voo. Por fim, quando a barra
apresentar a coloração verde, significa que tudo está correto e será possível efetuar
um voo com segurança. Se for pressionada essa barra, será apresentado o menu
que contém a Figura 25.
Relatório de Acompanhamento
Final
36
1 23 4 5 6 7
8 9 10
11
12
13
14
15
16
17
18
Figura 24 - Tela principal do aplicativo de controle que possui todas as informações da aeronave. Fonte: Autoria própria.
2 - Indica o nível de bateria restante. Esse item possuirá faixas de cores que
apresentam os níveis configurados, sendo verde a operação normal, amarelo em
nível baixo e vermelho nível crítico. Além disso, o balão branco fornece o tempo
estimado de voo com aquela bateria.
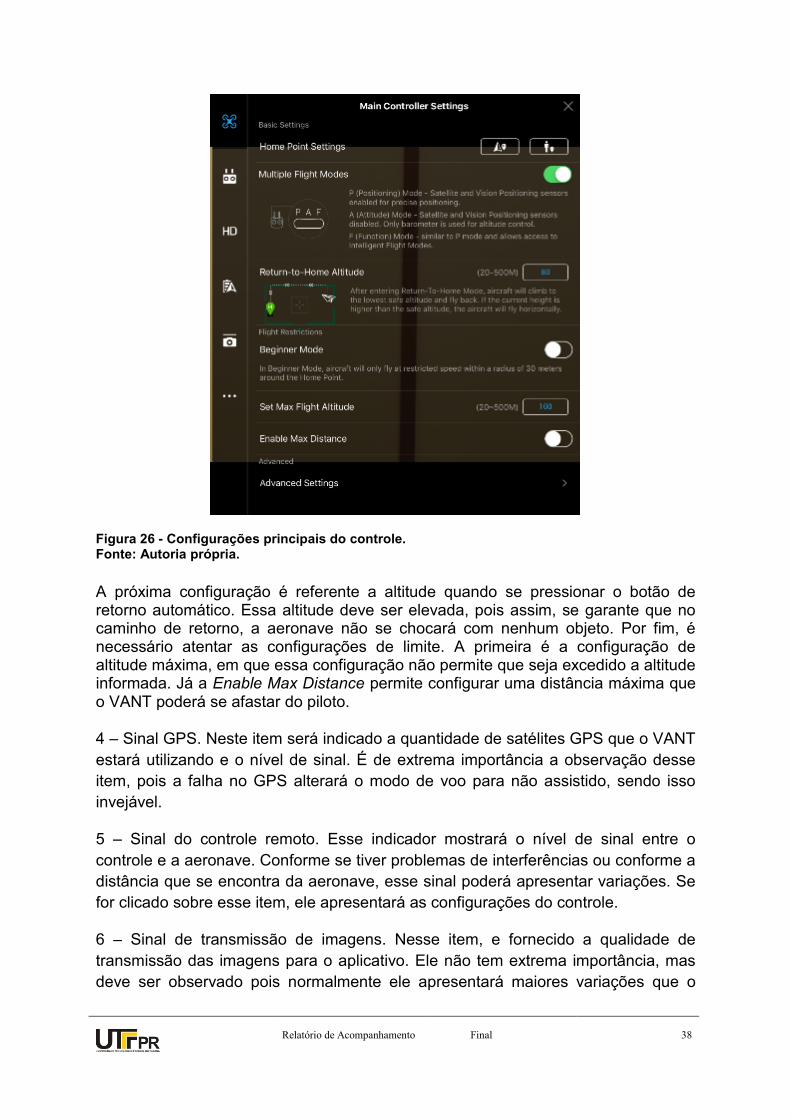
3 – Modo de Voo atual. Este indicador, mostra em qual modo de voo o VANT está
operando. Se for clicado sobre ele, será possível efetuar as configurações de
retorno, limites e outras configurações que podem ser visualizadas na Figura 26.
Nesse menu, é possível configurar o ponto de retorno, podendo-se se escolher para
retornar no ponto de decolagem ou no ponto atual. A próxima configuração é
permitir ou não múltiplos modos de voos. Para se alterar os modos de voo, utiliza-se
a chave no lado esquerdo do controle remoto. O modo de voo “P” é o modo de voo
com assistência, onde essa assistência constitui de na operação, a própria
aeronave efetuará as compensações necessárias para uma operação segura. Caso
o sinal GPS não esteja disponível, esse modo de voo não funcionará de forma
correta, e operará da mesma maneira que no modo de voo “A”, com a diferença de

Relatório de Acompanhamento
Final
37
que, ao se obter sinal GPS, a operação ficará normal. O modo de voo “A”, opera
sem o GPS, sendo esse modo para pilotos mais experientes, pois como ele usa
somente o barômetro, quando se tiver ventos a aeronave não estabilizará de forma
automática, sendo necessário a intervenção do piloto. Por fim o modo “F” funciona
da mesma maneira que o modo “P”, diferindo que no aplicativo, o item 15 aparecerá
na tela. Esse modo permite a programação de voo automático. As funções desse
modo serão exploradas no item 15.
Figura 25 - Menu de estado atual. Fonte: Autoria própria.
Relatório de Acompanhamento
Final
38
Figura 26 - Configurações principais do controle. Fonte: Autoria própria.
A próxima configuração é referente a altitude quando se pressionar o botão de retorno automático. Essa altitude deve ser elevada, pois assim, se garante que no caminho de retorno, a aeronave não se chocará com nenhum objeto. Por fim, é necessário atentar as configurações de limite. A primeira é a configuração de altitude máxima, em que essa configuração não permite que seja excedido a altitude informada. Já a Enable Max Distance permite configurar uma distância máxima que o VANT poderá se afastar do piloto.
4 – Sinal GPS. Neste item será indicado a quantidade de satélites GPS que o VANT
estará utilizando e o nível de sinal. É de extrema importância a observação desse
item, pois a falha no GPS alterará o modo de voo para não assistido, sendo isso
invejável.
5 – Sinal do controle remoto. Esse indicador mostrará o nível de sinal entre o
controle e a aeronave. Conforme se tiver problemas de interferências ou conforme a
distância que se encontra da aeronave, esse sinal poderá apresentar variações. Se
for clicado sobre esse item, ele apresentará as configurações do controle.
6 – Sinal de transmissão de imagens. Nesse item, e fornecido a qualidade de
transmissão das imagens para o aplicativo. Ele não tem extrema importância, mas
deve ser observado pois normalmente ele apresentará maiores variações que o
Relatório de Acompanhamento
Final
39
sinal do controle. Se for pressionado, apresentará informações dos canais de
transmissão.
7 – Nível de bateria. Esse item apresenta a porcentagem e tensão da bateria. Ele
mostra de forma mais precisa que a barra do item 2. Se for pressionado apresentará
o menu da Figura 20.
8 – Informações da câmera. Neste item é apresentado às configurações da câmera,
como modo de configuração, abertura, luminosidade e abertura.
9 – Informações de armazenamento. Nesse indicador mostra-se as informações de armazenamento do cartão de memória e do SSD, apresentado a quantidade de fotos que pode ser retirada, e tempo de vídeo que pode ser gravado e também a resolução de vídeo configurada. 10 – Configurações de foco. Nesse item poderá se configurar o modo do foco da
câmera ou da exposição, sendo normalmente utilizado o foco automático, ou foco
manual no infinito devido às alterações de altitude do ambiente que será adquirido
as imagens.
11 – Auto decolagem/pouso. Esse botão permite efetuar a decolagem automática,
em que a aeronave se posicionará a 1,2 metros de altitude ou o pouso automático.
12 – Configuração do gimbal1. Esse botão indica qual o modo atual do gimbal e se
clicado apresenta os modos de configurações do gimbal. Esses modos são
interessantes pois podem facilitar a aquisição de imagens. Normalmente será
utilizado o siga-me, pois assim, a câmera sempre seguirá a frente da aeronave.
13 – Retorno automático. Além de possuir o botão de retorno no controle, é
disponibilizado um botão de retorno no aplicativo. Esse botão ao ser pressionado irá
fazer o retorno automático para o ponto configurado no item 3. Esse botão também
permitirá o cancelamento da operação de retorno quando a mesma for solicitada.
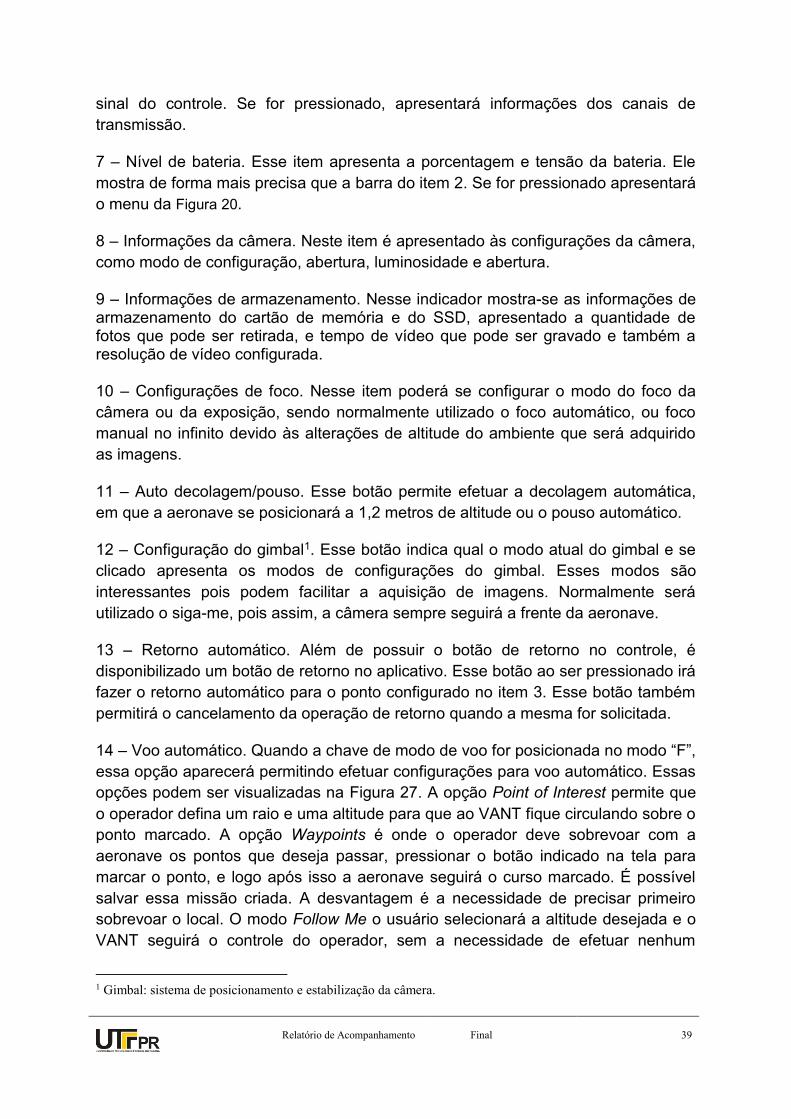
14 – Voo automático. Quando a chave de modo de voo for posicionada no modo “F”,
essa opção aparecerá permitindo efetuar configurações para voo automático. Essas
opções podem ser visualizadas na Figura 27. A opção Point of Interest permite que
o operador defina um raio e uma altitude para que ao VANT fique circulando sobre o
ponto marcado. A opção Waypoints é onde o operador deve sobrevoar com a
aeronave os pontos que deseja passar, pressionar o botão indicado na tela para
marcar o ponto, e logo após isso a aeronave seguirá o curso marcado. É possível
salvar essa missão criada. A desvantagem é a necessidade de precisar primeiro
sobrevoar o local. O modo Follow Me o usuário selecionará a altitude desejada e o
VANT seguirá o controle do operador, sem a necessidade de efetuar nenhum
1 Gimbal: sistema de posicionamento e estabilização da câmera.
Relatório de Acompanhamento
Final
40
controle. Já o Home Lock faz com que a aeronave fixe a sua direção com o ponto
de início. Por fim, o Course Lock bloqueia as direções da aeronave, fazendo com
que o voo seja efetuado na direção que for travada0.
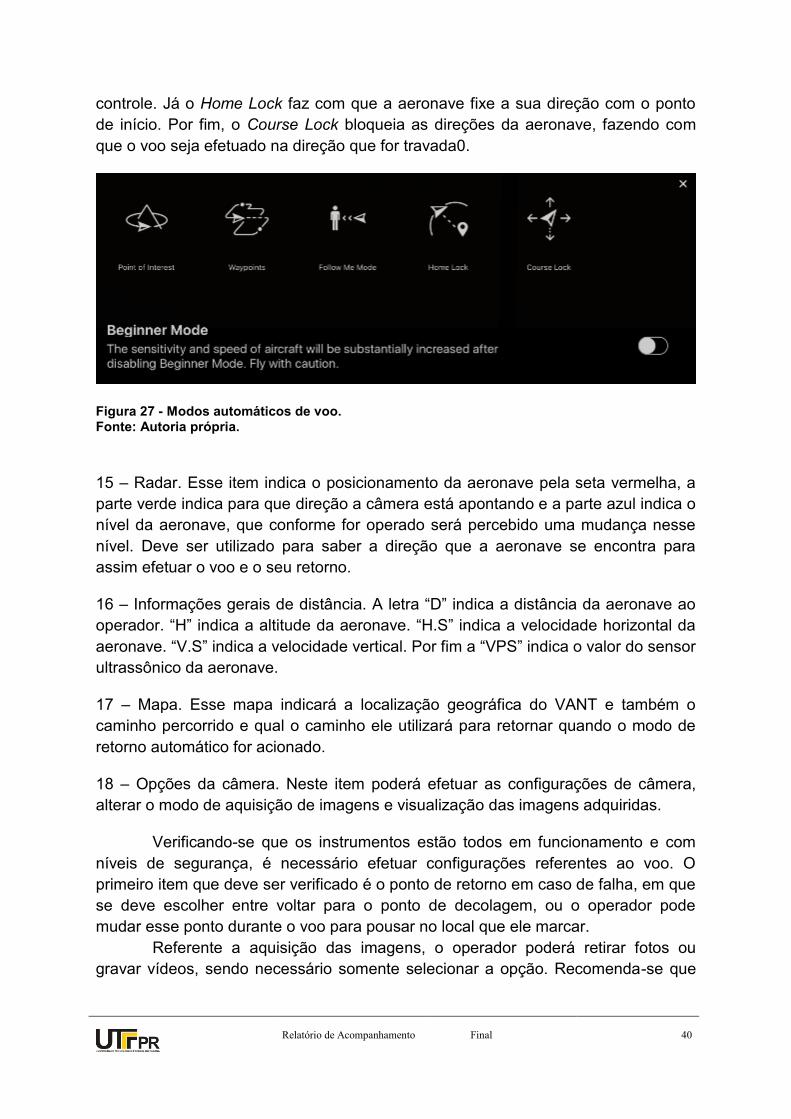
Figura 27 - Modos automáticos de voo. Fonte: Autoria própria.
15 – Radar. Esse item indica o posicionamento da aeronave pela seta vermelha, a
parte verde indica para que direção a câmera está apontando e a parte azul indica o
nível da aeronave, que conforme for operado será percebido uma mudança nesse
nível. Deve ser utilizado para saber a direção que a aeronave se encontra para
assim efetuar o voo e o seu retorno.
16 – Informações gerais de distância. A letra “D” indica a distância da aeronave ao
operador. “H” indica a altitude da aeronave. “H.S” indica a velocidade horizontal da
aeronave. “V.S” indica a velocidade vertical. Por fim a “VPS” indica o valor do sensor
ultrassônico da aeronave.
17 – Mapa. Esse mapa indicará a localização geográfica do VANT e também o
caminho percorrido e qual o caminho ele utilizará para retornar quando o modo de
retorno automático for acionado.
18 – Opções da câmera. Neste item poderá efetuar as configurações de câmera,
alterar o modo de aquisição de imagens e visualização das imagens adquiridas.
Verificando-se que os instrumentos estão todos em funcionamento e com
níveis de segurança, é necessário efetuar configurações referentes ao voo. O
primeiro item que deve ser verificado é o ponto de retorno em caso de falha, em que
se deve escolher entre voltar para o ponto de decolagem, ou o operador pode
mudar esse ponto durante o voo para pousar no local que ele marcar.
Referente a aquisição das imagens, o operador poderá retirar fotos ou
gravar vídeos, sendo necessário somente selecionar a opção. Recomenda-se que
Relatório de Acompanhamento
Final
41
deixe a câmera em modo automático de controle dos parâmetros, pois devido ao
seu deslocamento, uma configuração fixa pode fornecer imagens ruins. Outro item
que deve ser atentado é referente ao foco da câmera. Sempre antes de iniciar a
aquisição recomenda-se tocar no centro da tela do dispositivo móvel para a mesma
efetuar o foco automático. A direção da câmera pode ser alterada diretamente no
controle, ou simplesmente posicionando o dedo por um segundo na tela até
aparecer o círculo azul no local que foi posicionado o dedo. Assim é só mover o
dedo na tela para alterar a direção da câmera. Também deve-se atentar a
quantidade de armazenamento disponível para efetuar as aquisições, e resolução
das imagens que serão adquiridas.
Estando todas as verificações de segurança concluídas e as configurações
da câmera, o voo poderá ser iniciado. Durante o voo, deve-se inicialmente
posicionar a câmera de forma que se possa ver amplamente o possível trajeto antes
de se posicionar a câmera para efetuar a aquisição de imagens. Deve-se também
sempre posicionar o controle para o lado que a aeronave está, para assim, melhorar
o sinal de controle e de recepção das imagens. Além disso, o piloto deve atentar a
todos os instrumentos da aeronave, como GPS, modo de voo, níveis de bateria,
sinal do controle e da câmera, velocidade, distância, altitude e utilizar o mapa, para
verificar o local em que se encontra, o caminho de retorno e o caminho já
percorrido. É importante lembrar que sob hipótese alguma deve-se efetuar algum
procedimento de desligamento dos motores da aeronave, pois caso os mesmos
sejam executados, eles serão aceitos não importando a altitude ou distância do
ponto de retorno, e isso ocasionará na queda da aeronave. Durante o voo, a
qualquer momento o operador pode solicitar o retorno automático da aeronave,
lembrando-se que esse retorno tem uma velocidade reduzida, sendo mais
recomendável, na medida do possível, retornar de forma manual. Além disso, em
caso de perda de sinal do controle com a aeronave, a mesma iniciará o retorno de
forma automática, e o mesmo acontecerá quando o nível de bateria baixa for
atingido. Normalmente podem ocorrer interferências no sinal de controle, pois o
mesmo opera em canal secundário, e caso ocorram transmissões de rádio de
viaturas, se terá um corte de sinal. Também, em local com alta interferência se terá
cortes no sinal de transmissão de vídeo, sendo que o operador deve atentar aos
indicadores de sinal e sempre se direcionar para o lado da aeronave. Com o voo
concluído, deve-se encontrar um local seguro para efetuar o pouso. Deve-se descer
de forma lenta e esperar que o trem de pouso desça para que assim o pouso seja
efetuado com segurança. Em momento algum do voo se deve efetuar o
procedimento de desligar os motores, pois caso essa operação seja aceita, a
aeronave será desligada.
Com a aeronave já em terra, caso não seja mais necessário nenhum voo, é
preciso primeiramente remover as hélices, a câmera e por fim colocar a aeronave
em modo de viagem.
Relatório de Acompanhamento
Final
42
Referente ao armazenamento da mesma, as baterias da aeronave devem
estar com carga entre 10 a 20% para evitar danos nas baterias. Além disso, o
fabricante recomenda que a cada 10 recargas, seja efetuado a total drenagem da
bateria para assim fazer uma recarga total. Também não se deve armazenar as
mesmas com carga superior a 20% pois a carga que a aeronave perder para o
ambiente não é recuperável, danificando assim a capacidade de armazenamento da
bateria. Outro item é não armazenar com carga esgotada, pois a mesma poderá não
mais funcionar, sendo necessário assim, enviar essa bateria para uma recuperação.
Além das verificações com baterias, é recomendável que seja verificado, ao
menos uma vez na semana se não existe nenhuma atualização para os dispositivos
da aeronave, pois essas atualizações efetuam correções e melhorias nos
dispositivos.
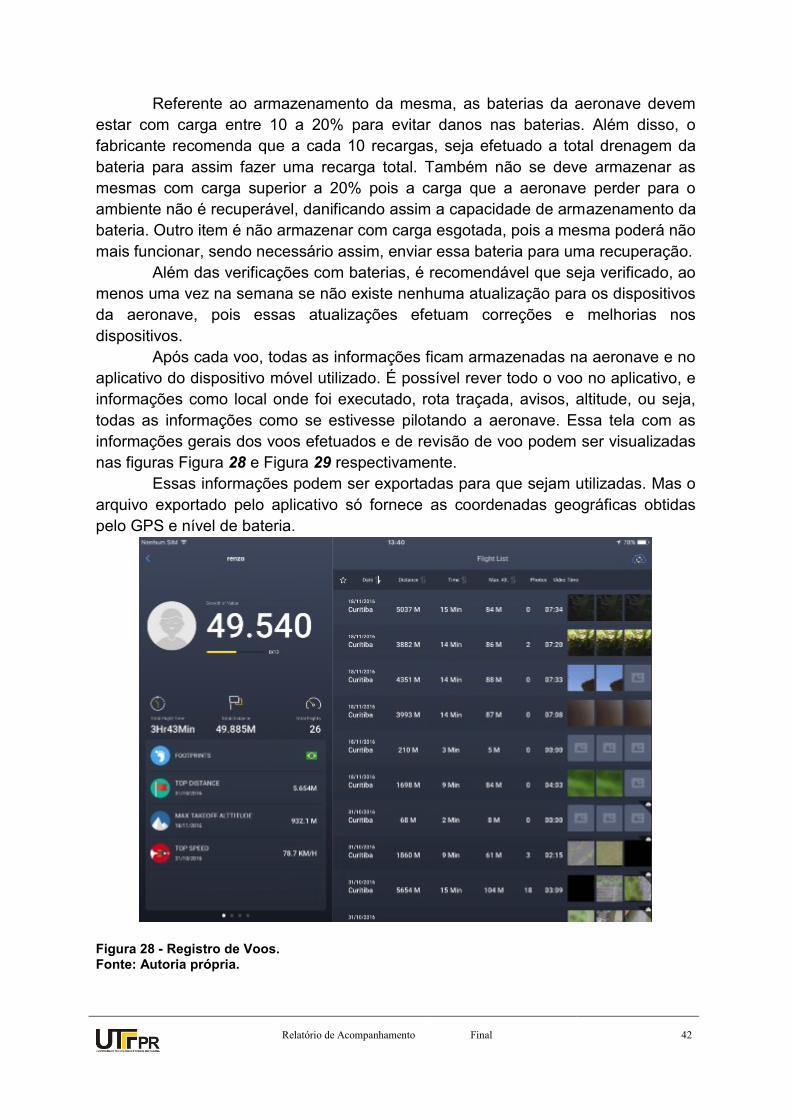
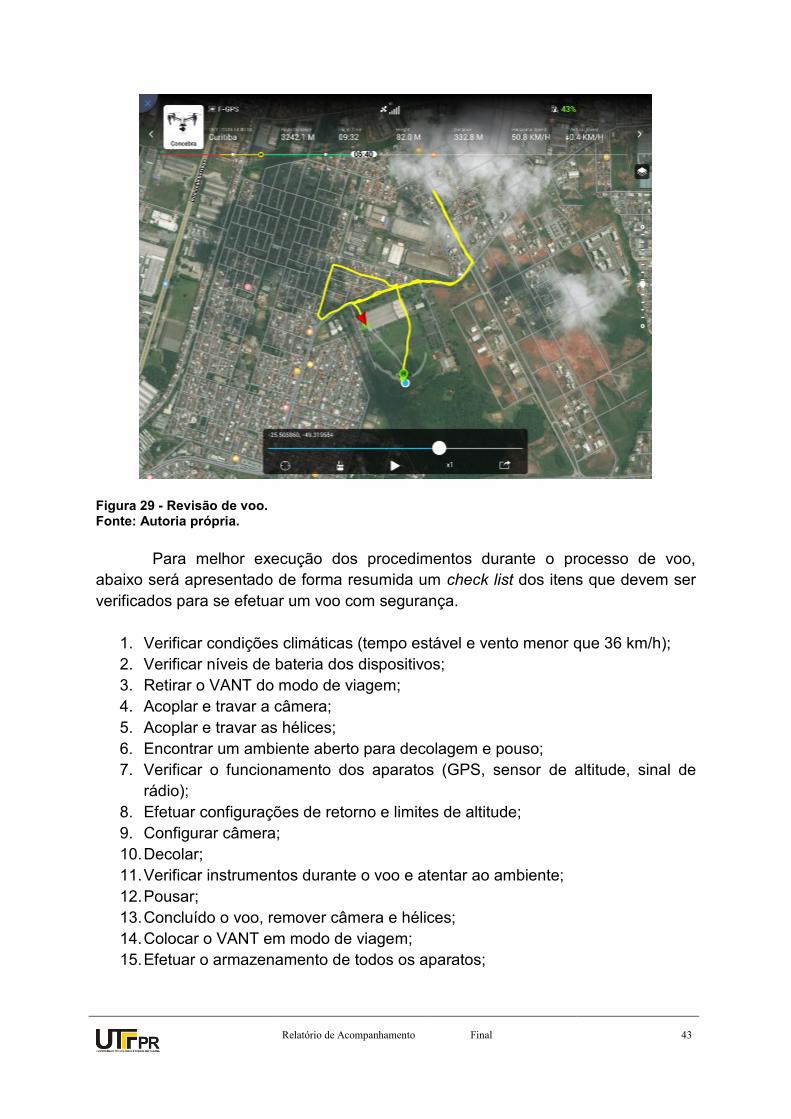
Após cada voo, todas as informações ficam armazenadas na aeronave e no
aplicativo do dispositivo móvel utilizado. É possível rever todo o voo no aplicativo, e
informações como local onde foi executado, rota traçada, avisos, altitude, ou seja,
todas as informações como se estivesse pilotando a aeronave. Essa tela com as
informações gerais dos voos efetuados e de revisão de voo podem ser visualizadas
nas figuras Figura 28 e Figura 29 respectivamente.
Essas informações podem ser exportadas para que sejam utilizadas. Mas o
arquivo exportado pelo aplicativo só fornece as coordenadas geográficas obtidas
pelo GPS e nível de bateria.
Figura 28 - Registro de Voos. Fonte: Autoria própria.
Relatório de Acompanhamento
Final
43
Figura 29 - Revisão de voo. Fonte: Autoria própria.
Para melhor execução dos procedimentos durante o processo de voo,
abaixo será apresentado de forma resumida um check list dos itens que devem ser
verificados para se efetuar um voo com segurança.
1. Verificar condições climáticas (tempo estável e vento menor que 36 km/h);
2. Verificar níveis de bateria dos dispositivos;
3. Retirar o VANT do modo de viagem;
4. Acoplar e travar a câmera;
5. Acoplar e travar as hélices;
6. Encontrar um ambiente aberto para decolagem e pouso;
7. Verificar o funcionamento dos aparatos (GPS, sensor de altitude, sinal de
rádio);
8. Efetuar configurações de retorno e limites de altitude;
9. Configurar câmera;
10. Decolar;
11. Verificar instrumentos durante o voo e atentar ao ambiente;
12. Pousar;
13. Concluído o voo, remover câmera e hélices;
14. Colocar o VANT em modo de viagem;
15. Efetuar o armazenamento de todos os aparatos;
Relatório de Acompanhamento
Final
44
Seguindo-se essas instruções, será possível efetuar um voo com
segurança. Mesmo essa etapa tendo sido concluída, essas descrições dos
procedimentos poderão sofrer alterações para que se possa executar um voo com
maior segurança e com maior aproveitamento na execução das tarefas.
Com todas essas regras de preparo e execução de voo definidas, as tarefas já
possuem uma descrição da forma que devem ser executadas, diferenciando
somente o modo de voo que o operador utiliza para efetuar o voo. Assim, essa
etapa foi concluída, sendo necessário somente compor um arquivo que contenha as
informações dessa etapa, para que assim, o operador possa seguir as
recomendações apresentadas, efetuar o check list e consultar esse documento caso
tenha alguma dúvida básica, em que, para dúvidas mais especificas, deve ser
consultado o manual.
3.6 Definição de Parâmetros de voo (rota, distância, altura, tempo...)
INÍCIO: 5º mês
TÉRMINO: 22º mês
Descrição da Etapa
Apresentar procedimentos para definição de rotas/parametrização do VANT. O
indicador desta etapa será um documento com procedimentos para parametrização
do VANT a partir dos pontos de interesse pré-determinados.
Resultado
Com a aquisição do VANT, essa etapa será iniciada assim que o mesmo entrar em
operação. Alguns parâmetros de altitude e velocidade de voo foram simulados no
software Infraworks 360 da Autodesk. Nesse software, foi escolhido uma parte de
uma rodovia aleatória, definido a altitude que as imagens serão adquiridas e a
velocidade da aeronave. Para meio de simulação, foi definido como altitude 10
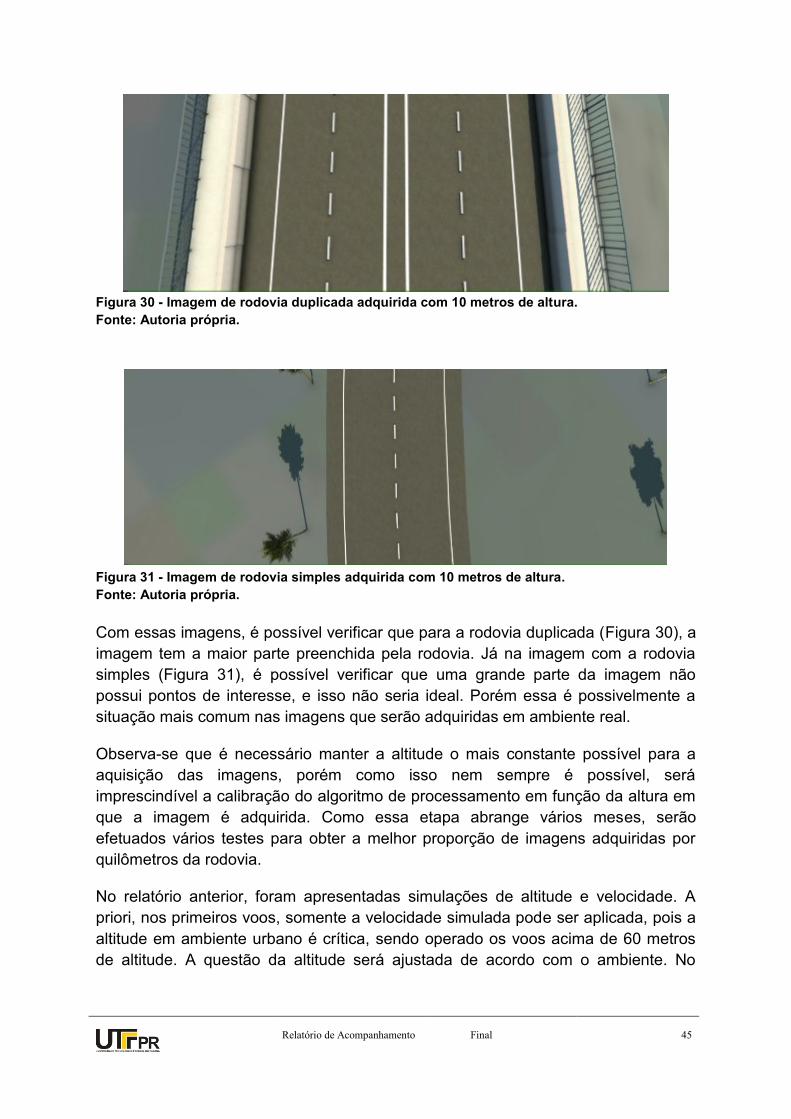
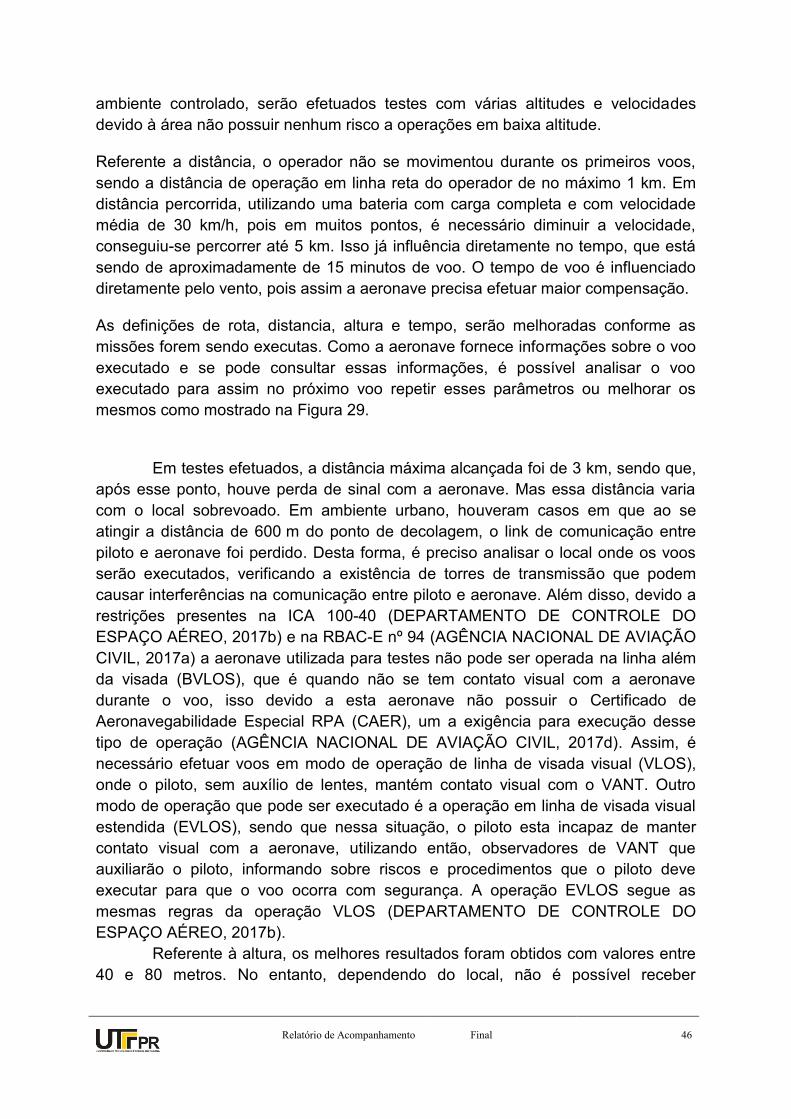
metros e velocidade de 30 km/h. Para demonstrar, a Figura 30 e Figura 31 apresentam os resultados adquiridos. Com o auxílio do software Infraworks 360,
foram geradas imagens de rodovias, e também, de sinalização de rodovias que
foram posteriormente processadas, empregando o algoritmo desenvolvido para
processamento automático de imagens.
Relatório de Acompanhamento
Final
45
Figura 30 - Imagem de rodovia duplicada adquirida com 10 metros de altura.
Fonte: Autoria própria.
Figura 31 - Imagem de rodovia simples adquirida com 10 metros de altura.
Fonte: Autoria própria.
Com essas imagens, é possível verificar que para a rodovia duplicada (Figura 30), a
imagem tem a maior parte preenchida pela rodovia. Já na imagem com a rodovia
simples (Figura 31), é possível verificar que uma grande parte da imagem não
possui pontos de interesse, e isso não seria ideal. Porém essa é possivelmente a
situação mais comum nas imagens que serão adquiridas em ambiente real.
Observa-se que é necessário manter a altitude o mais constante possível para a
aquisição das imagens, porém como isso nem sempre é possível, será
imprescindível a calibração do algoritmo de processamento em função da altura em
que a imagem é adquirida. Como essa etapa abrange vários meses, serão
efetuados vários testes para obter a melhor proporção de imagens adquiridas por
quilômetros da rodovia.
No relatório anterior, foram apresentadas simulações de altitude e velocidade. A
priori, nos primeiros voos, somente a velocidade simulada pode ser aplicada, pois a
altitude em ambiente urbano é crítica, sendo operado os voos acima de 60 metros
de altitude. A questão da altitude será ajustada de acordo com o ambiente. No
Relatório de Acompanhamento
Final
46
ambiente controlado, serão efetuados testes com várias altitudes e velocidades
devido à área não possuir nenhum risco a operações em baixa altitude.
Referente a distância, o operador não se movimentou durante os primeiros voos,
sendo a distância de operação em linha reta do operador de no máximo 1 km. Em
distância percorrida, utilizando uma bateria com carga completa e com velocidade
média de 30 km/h, pois em muitos pontos, é necessário diminuir a velocidade,
conseguiu-se percorrer até 5 km. Isso já influência diretamente no tempo, que está
sendo de aproximadamente de 15 minutos de voo. O tempo de voo é influenciado
diretamente pelo vento, pois assim a aeronave precisa efetuar maior compensação.
As definições de rota, distancia, altura e tempo, serão melhoradas conforme as
missões forem sendo executas. Como a aeronave fornece informações sobre o voo
executado e se pode consultar essas informações, é possível analisar o voo
executado para assim no próximo voo repetir esses parâmetros ou melhorar os
mesmos como mostrado na Figura 29.
Em testes efetuados, a distância máxima alcançada foi de 3 km, sendo que,
após esse ponto, houve perda de sinal com a aeronave. Mas essa distância varia
com o local sobrevoado. Em ambiente urbano, houveram casos em que ao se
atingir a distância de 600 m do ponto de decolagem, o link de comunicação entre
piloto e aeronave foi perdido. Desta forma, é preciso analisar o local onde os voos
serão executados, verificando a existência de torres de transmissão que podem
causar interferências na comunicação entre piloto e aeronave. Além disso, devido a
restrições presentes na ICA 100-40 (DEPARTAMENTO DE CONTROLE DO
ESPAÇO AÉREO, 2017b) e na RBAC-E nº 94 (AGÊNCIA NACIONAL DE AVIAÇÃO
CIVIL, 2017a) a aeronave utilizada para testes não pode ser operada na linha além
da visada (BVLOS), que é quando não se tem contato visual com a aeronave
durante o voo, isso devido a esta aeronave não possuir o Certificado de
Aeronavegabilidade Especial RPA (CAER), um a exigência para execução desse
tipo de operação (AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL, 2017d). Assim, é
necessário efetuar voos em modo de operação de linha de visada visual (VLOS),
onde o piloto, sem auxílio de lentes, mantém contato visual com o VANT. Outro
modo de operação que pode ser executado é a operação em linha de visada visual
estendida (EVLOS), sendo que nessa situação, o piloto esta incapaz de manter
contato visual com a aeronave, utilizando então, observadores de VANT que
auxiliarão o piloto, informando sobre riscos e procedimentos que o piloto deve
executar para que o voo ocorra com segurança. A operação EVLOS segue as
mesmas regras da operação VLOS (DEPARTAMENTO DE CONTROLE DO
ESPAÇO AÉREO, 2017b).
Referente à altura, os melhores resultados foram obtidos com valores entre
40 e 80 metros. No entanto, dependendo do local, não é possível receber
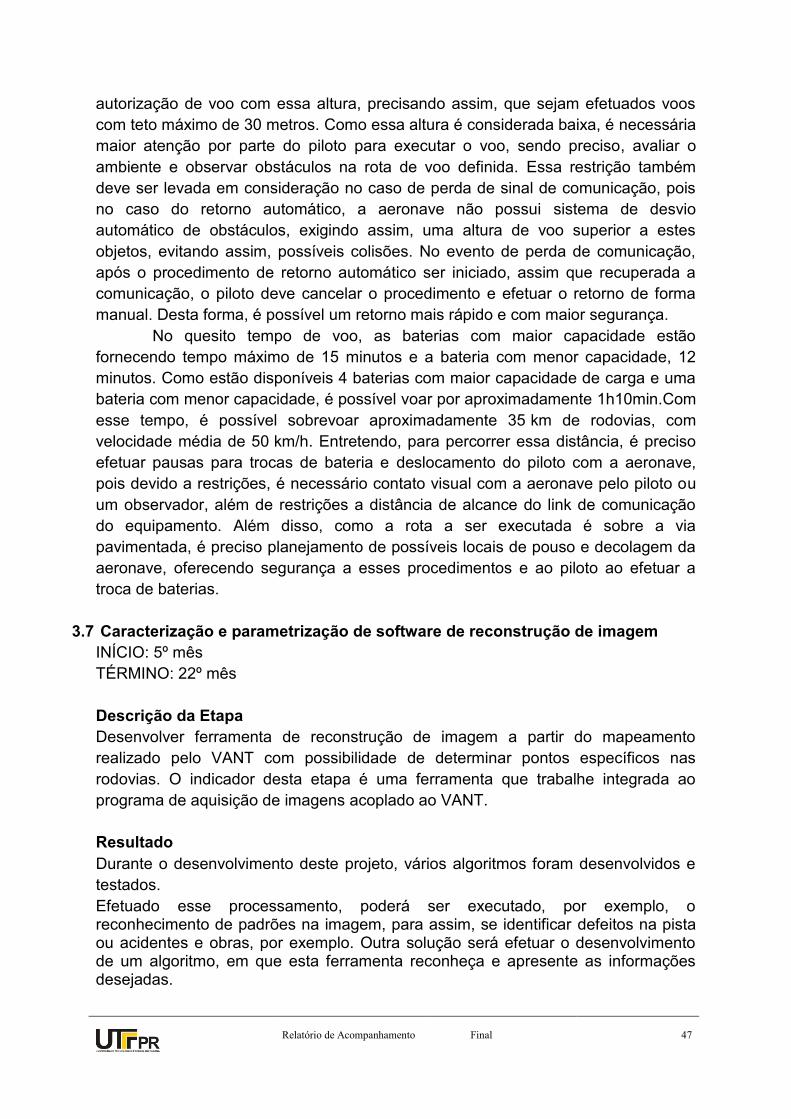
Relatório de Acompanhamento
Final
47
autorização de voo com essa altura, precisando assim, que sejam efetuados voos
com teto máximo de 30 metros. Como essa altura é considerada baixa, é necessária
maior atenção por parte do piloto para executar o voo, sendo preciso, avaliar o
ambiente e observar obstáculos na rota de voo definida. Essa restrição também
deve ser levada em consideração no caso de perda de sinal de comunicação, pois
no caso do retorno automático, a aeronave não possui sistema de desvio
automático de obstáculos, exigindo assim, uma altura de voo superior a estes
objetos, evitando assim, possíveis colisões. No evento de perda de comunicação,
após o procedimento de retorno automático ser iniciado, assim que recuperada a
comunicação, o piloto deve cancelar o procedimento e efetuar o retorno de forma
manual. Desta forma, é possível um retorno mais rápido e com maior segurança.
No quesito tempo de voo, as baterias com maior capacidade estão
fornecendo tempo máximo de 15 minutos e a bateria com menor capacidade, 12
minutos. Como estão disponíveis 4 baterias com maior capacidade de carga e uma
bateria com menor capacidade, é possível voar por aproximadamente 1h10min.Com
esse tempo, é possível sobrevoar aproximadamente 35 km de rodovias, com
velocidade média de 50 km/h. Entretendo, para percorrer essa distância, é preciso
efetuar pausas para trocas de bateria e deslocamento do piloto com a aeronave,
pois devido a restrições, é necessário contato visual com a aeronave pelo piloto ou
um observador, além de restrições a distância de alcance do link de comunicação
do equipamento. Além disso, como a rota a ser executada é sobre a via
pavimentada, é preciso planejamento de possíveis locais de pouso e decolagem da
aeronave, oferecendo segurança a esses procedimentos e ao piloto ao efetuar a
troca de baterias.
3.7 Caracterização e parametrização de software de reconstrução de imagem
INÍCIO: 5º mês
TÉRMINO: 22º mês
Descrição da Etapa
Desenvolver ferramenta de reconstrução de imagem a partir do mapeamento
realizado pelo VANT com possibilidade de determinar pontos específicos nas
rodovias. O indicador desta etapa é uma ferramenta que trabalhe integrada ao
programa de aquisição de imagens acoplado ao VANT.
Resultado
Durante o desenvolvimento deste projeto, vários algoritmos foram desenvolvidos e
testados.
Efetuado esse processamento, poderá ser executado, por exemplo, o reconhecimento de padrões na imagem, para assim, se identificar defeitos na pista ou acidentes e obras, por exemplo. Outra solução será efetuar o desenvolvimento de um algoritmo, em que esta ferramenta reconheça e apresente as informações desejadas.
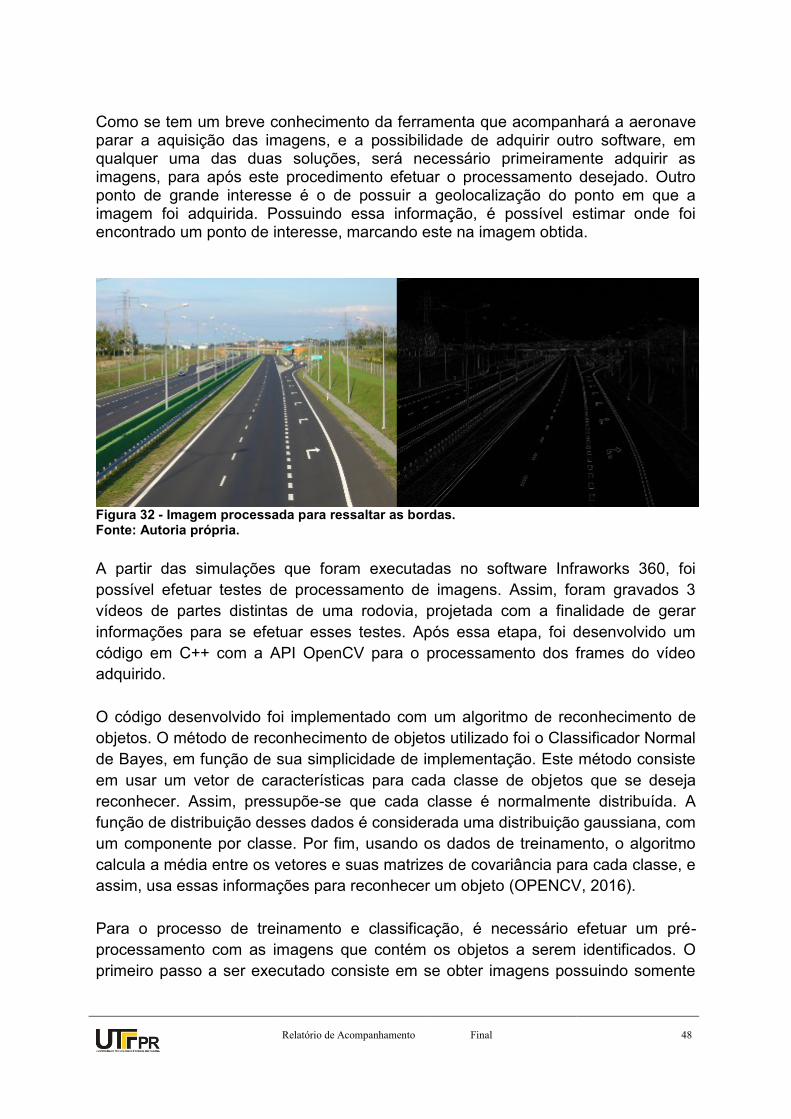
Relatório de Acompanhamento
Final
48
Como se tem um breve conhecimento da ferramenta que acompanhará a aeronave parar a aquisição das imagens, e a possibilidade de adquirir outro software, em qualquer uma das duas soluções, será necessário primeiramente adquirir as imagens, para após este procedimento efetuar o processamento desejado. Outro ponto de grande interesse é o de possuir a geolocalização do ponto em que a imagem foi adquirida. Possuindo essa informação, é possível estimar onde foi encontrado um ponto de interesse, marcando este na imagem obtida.
Figura 32 - Imagem processada para ressaltar as bordas. Fonte: Autoria própria.
A partir das simulações que foram executadas no software Infraworks 360, foi
possível efetuar testes de processamento de imagens. Assim, foram gravados 3
vídeos de partes distintas de uma rodovia, projetada com a finalidade de gerar
informações para se efetuar esses testes. Após essa etapa, foi desenvolvido um
código em C++ com a API OpenCV para o processamento dos frames do vídeo
adquirido.
O código desenvolvido foi implementado com um algoritmo de reconhecimento de
objetos. O método de reconhecimento de objetos utilizado foi o Classificador Normal
de Bayes, em função de sua simplicidade de implementação. Este método consiste
em usar um vetor de características para cada classe de objetos que se deseja
reconhecer. Assim, pressupõe-se que cada classe é normalmente distribuída. A
função de distribuição desses dados é considerada uma distribuição gaussiana, com
um componente por classe. Por fim, usando os dados de treinamento, o algoritmo
calcula a média entre os vetores e suas matrizes de covariância para cada classe, e
assim, usa essas informações para reconhecer um objeto (OPENCV, 2016).
Para o processo de treinamento e classificação, é necessário efetuar um pré-
processamento com as imagens que contém os objetos a serem identificados. O
primeiro passo a ser executado consiste em se obter imagens possuindo somente
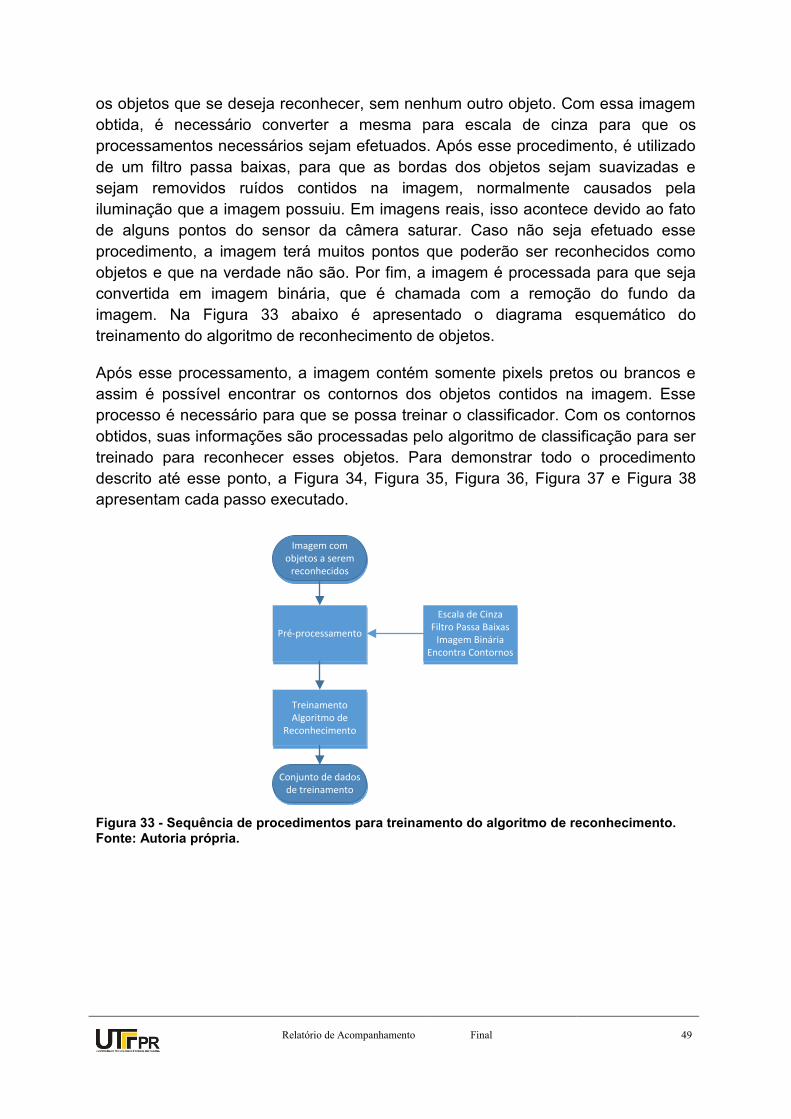
Relatório de Acompanhamento
Final
49
os objetos que se deseja reconhecer, sem nenhum outro objeto. Com essa imagem
obtida, é necessário converter a mesma para escala de cinza para que os
processamentos necessários sejam efetuados. Após esse procedimento, é utilizado
de um filtro passa baixas, para que as bordas dos objetos sejam suavizadas e
sejam removidos ruídos contidos na imagem, normalmente causados pela
iluminação que a imagem possuiu. Em imagens reais, isso acontece devido ao fato
de alguns pontos do sensor da câmera saturar. Caso não seja efetuado esse
procedimento, a imagem terá muitos pontos que poderão ser reconhecidos como
objetos e que na verdade não são. Por fim, a imagem é processada para que seja
convertida em imagem binária, que é chamada com a remoção do fundo da
imagem. Na Figura 33 abaixo é apresentado o diagrama esquemático do
treinamento do algoritmo de reconhecimento de objetos.
Após esse processamento, a imagem contém somente pixels pretos ou brancos e
assim é possível encontrar os contornos dos objetos contidos na imagem. Esse
processo é necessário para que se possa treinar o classificador. Com os contornos
obtidos, suas informações são processadas pelo algoritmo de classificação para ser
treinado para reconhecer esses objetos. Para demonstrar todo o procedimento
descrito até esse ponto, a Figura 34, Figura 35, Figura 36, Figura 37 e Figura 38
apresentam cada passo executado.
Pré-processamento
Imagem com objetos a serem
reconhecidos
Treinamento Algoritmo de
Reconhecimento
Conjunto de dados de treinamento
Escala de CinzaFiltro Passa Baixas
Imagem BináriaEncontra Contornos
Figura 33 - Sequência de procedimentos para treinamento do algoritmo de reconhecimento. Fonte: Autoria própria.
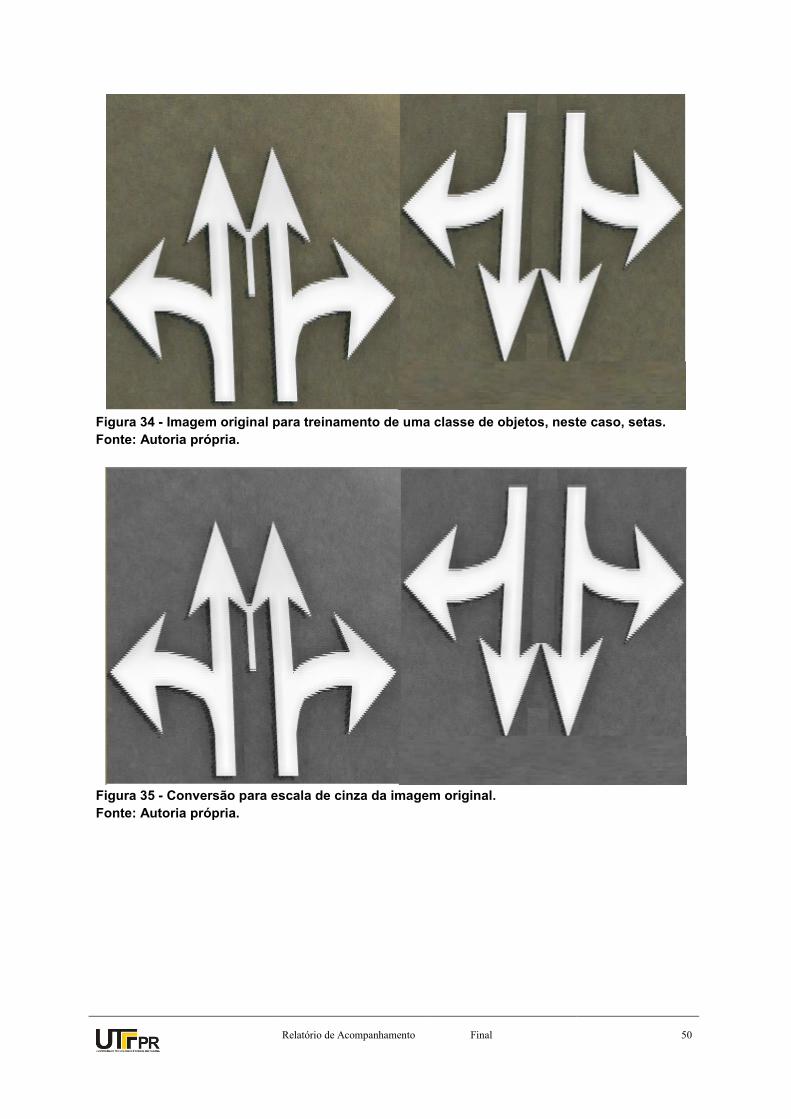
Relatório de Acompanhamento
Final
50
Figura 34 - Imagem original para treinamento de uma classe de objetos, neste caso, setas.
Fonte: Autoria própria.
Figura 35 - Conversão para escala de cinza da imagem original.
Fonte: Autoria própria.
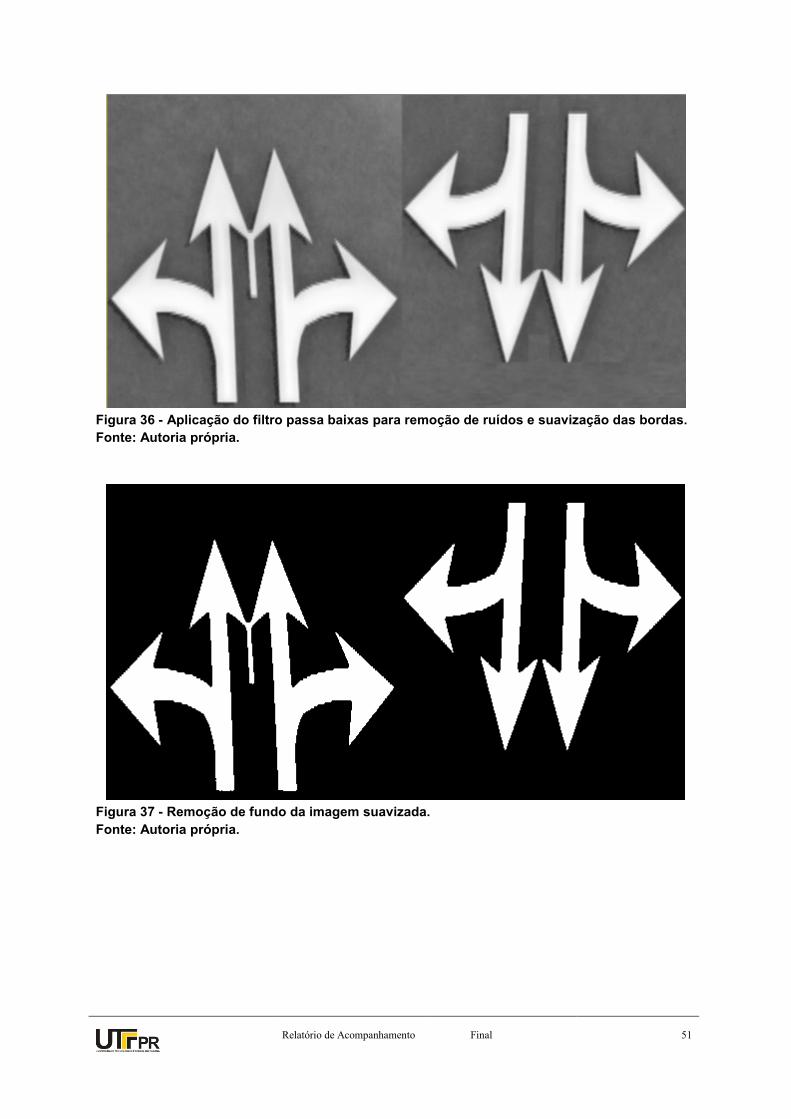
Relatório de Acompanhamento
Final
51
Figura 36 - Aplicação do filtro passa baixas para remoção de ruídos e suavização das bordas.
Fonte: Autoria própria.
Figura 37 - Remoção de fundo da imagem suavizada.
Fonte: Autoria própria.

Relatório de Acompanhamento
Final
52
Figura 38 - Contornos encontrados a partir da imagem binária.
Fonte: Autoria própria.
Após o treinamento do algoritmo, o mesmo é utilizado para reconhecer os mesmos
objetos em uma imagem. É executado o mesmo pré-processamento com a imagem
que contenha vários objetos a serem reconhecidos. Ao obter a imagem com os
contornos, é executado o algoritmo de reconhecimento de objetos. Finalmente, o
código desenvolvido marca os objetos reconhecidos e escreve a classe desse
objeto ao lado do contorno desse objeto.
Como exemplo de execução desse código, esse algoritmo foi treinado para
reconhecer traços e setas pintados em uma rodovia. A Figura 40 e Figura 41
apresentam os resultados obtidos para duas rodovias aleatórias obtidas dos vídeos
adquiridos no Infraworks 360. O fluxograma de operação do algoritmo é
apresentado na Figura 39 abaixo.
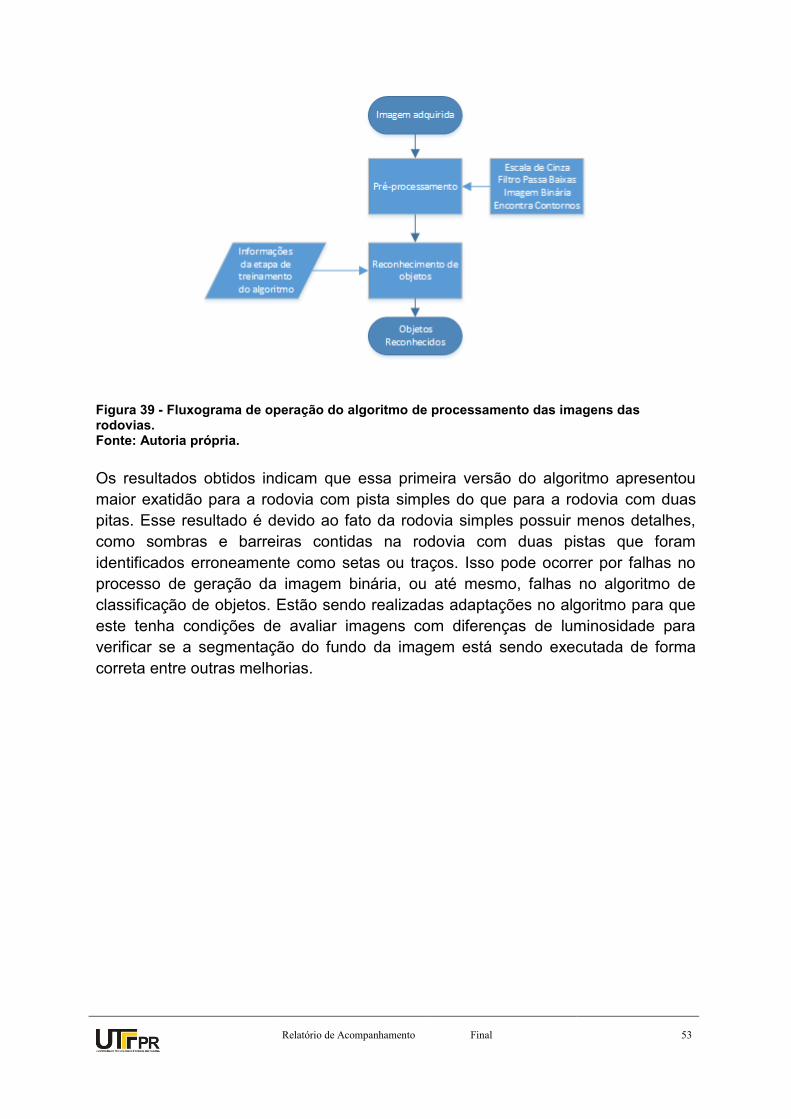
Relatório de Acompanhamento
Final
53
Figura 39 - Fluxograma de operação do algoritmo de processamento das imagens das rodovias. Fonte: Autoria própria.
Os resultados obtidos indicam que essa primeira versão do algoritmo apresentou
maior exatidão para a rodovia com pista simples do que para a rodovia com duas
pitas. Esse resultado é devido ao fato da rodovia simples possuir menos detalhes,
como sombras e barreiras contidas na rodovia com duas pistas que foram
identificados erroneamente como setas ou traços. Isso pode ocorrer por falhas no
processo de geração da imagem binária, ou até mesmo, falhas no algoritmo de
classificação de objetos. Estão sendo realizadas adaptações no algoritmo para que
este tenha condições de avaliar imagens com diferenças de luminosidade para
verificar se a segmentação do fundo da imagem está sendo executada de forma
correta entre outras melhorias.
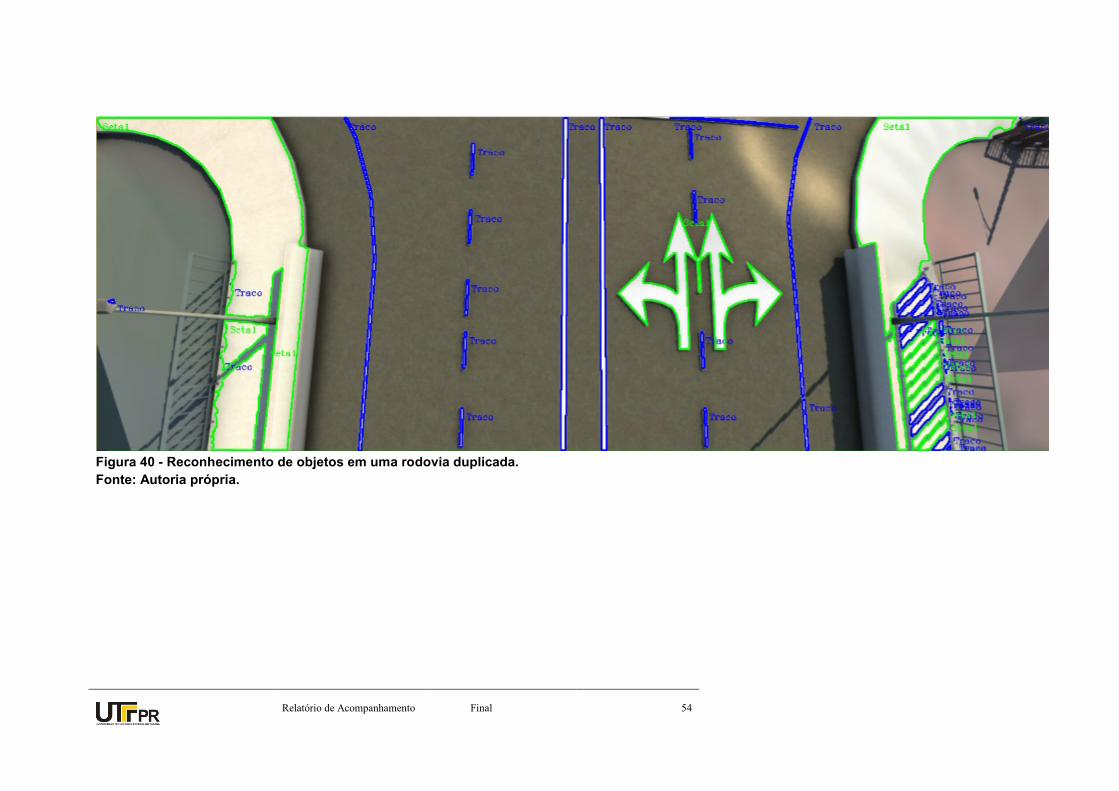
Relatório de Acompanhamento
Final
54
Figura 40 - Reconhecimento de objetos em uma rodovia duplicada.
Fonte: Autoria própria.
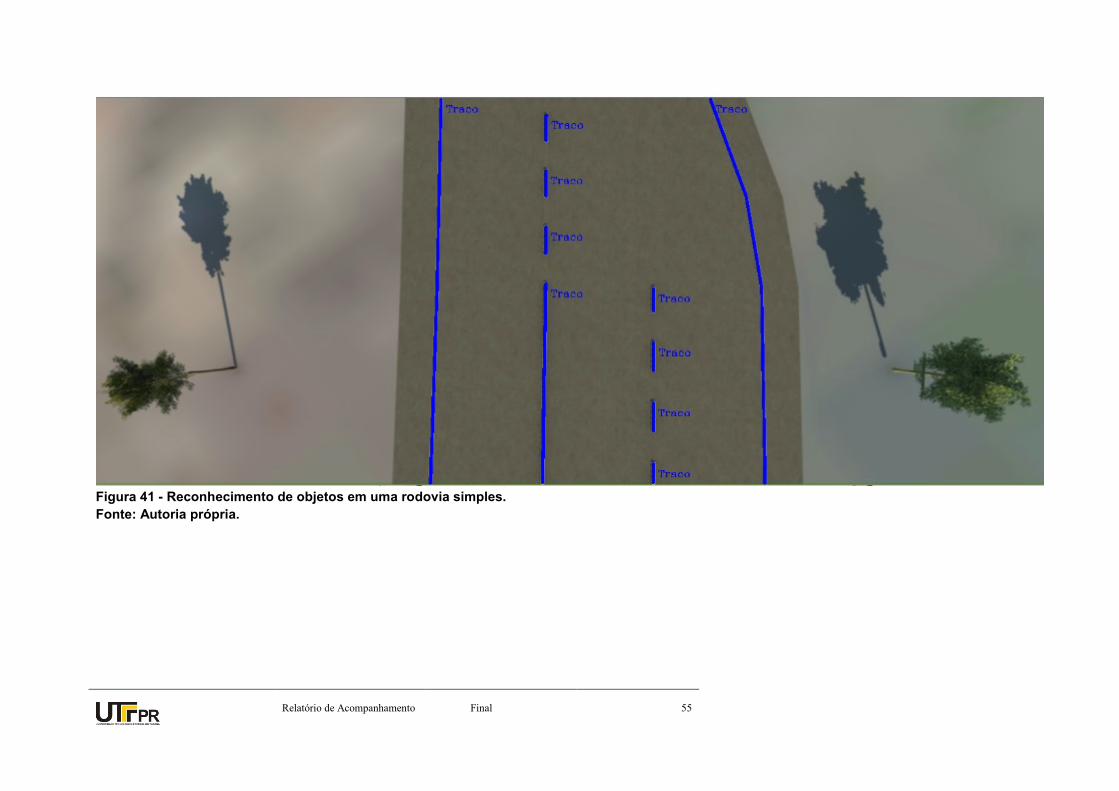
Relatório de Acompanhamento
Final
55
Figura 41 - Reconhecimento de objetos em uma rodovia simples.
Fonte: Autoria própria.
Relatório de Acompanhamento
Final
56
Além das imagens obtidas através do Infraworks 360, foram utilizados para os
testes com o algoritmo automático de processamento de imagens, outras imagens
com mais objetos a serem identificados e, com diferentes condições de
luminosidade. Para esse conjunto de imagens, além de se identificar setas e traços,
efetuou-se o treinamento do reconhecimento de faixas de acostamento ou final de
pista, sinais de preferencial e faixas de contenção. As imagens Figura 42, Figura 43,
Figura 44 e Figura 45 apresentam os resultados obtidos.
Nessas imagens é possível verificar que vários pontos da imagem foram
identificados como objetos, sendo que na verdade são somente problemas com a
remoção de fundo da imagem. Com isso, é possível verificar que a luminosidade
com que a imagem foi adquirida pode influenciar no processamento que se deve
executar na imagem. Para exemplificar melhor isso, a Figura 42 apresenta a
imagem original e sua imagem binária que será utilizada para reconhecer os
objetos. Nessa imagem, é possível verificar que vários pontos não foram removidos
no processo de transformar a imagem em binária, e assim, esses pontos serão
classificados como algum objeto.
Já na Figura 43 é apresentado o resultado da classificação dos objetos de interesse
na imagem que foram classificados corretamente, enquanto que os pontos que não
foram removidos da imagem foram classificados como algum objeto pelo algoritmo
de classificação. Em todas as imagens, objetos com contornos em azul são as
faixas centrais (traços), verde são as setas, amarelo faixas laterais, vermelho a
sinalização de preferencial e rosa as faixas de contenção.
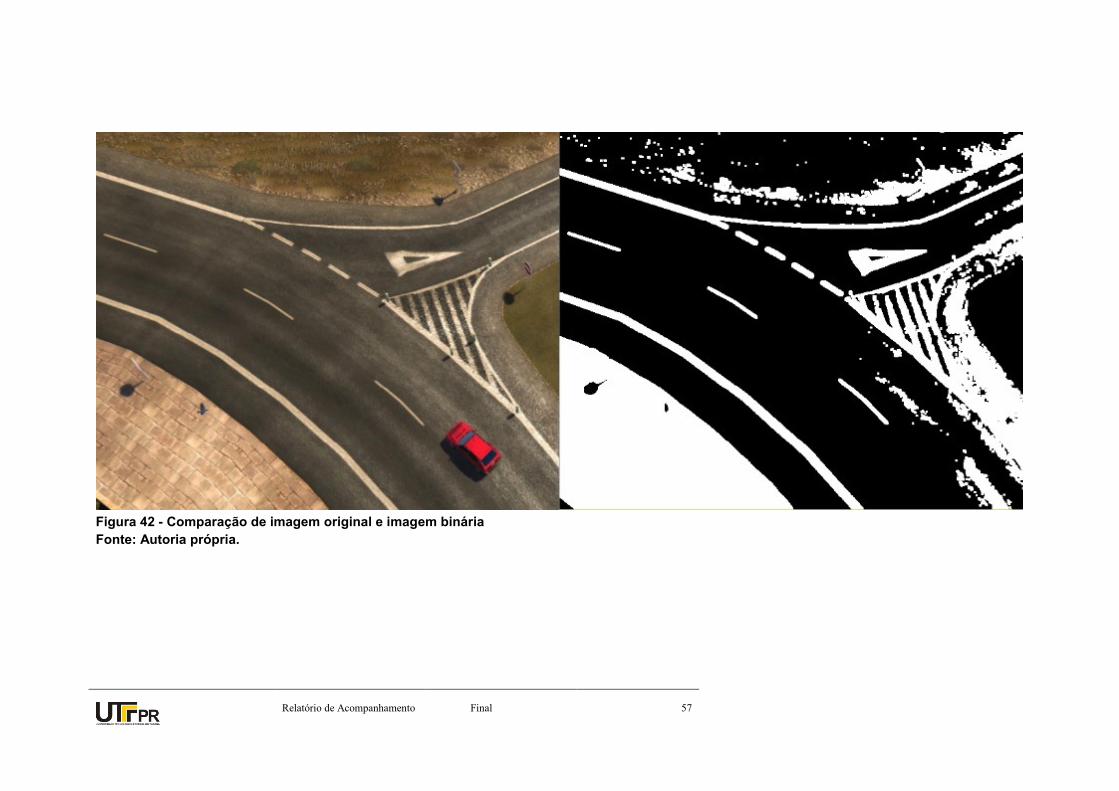
Relatório de Acompanhamento
Final
57
Figura 42 - Comparação de imagem original e imagem binária
Fonte: Autoria própria.
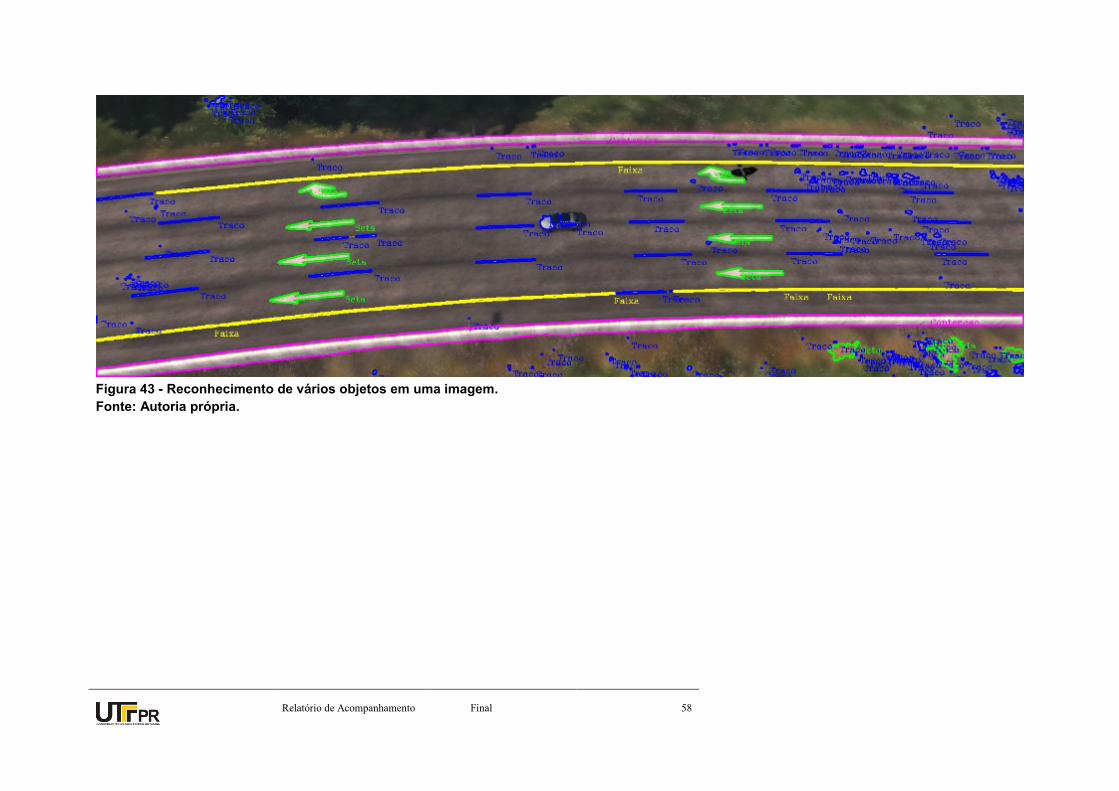
Relatório de Acompanhamento
Final
58
Figura 43 - Reconhecimento de vários objetos em uma imagem.
Fonte: Autoria própria.
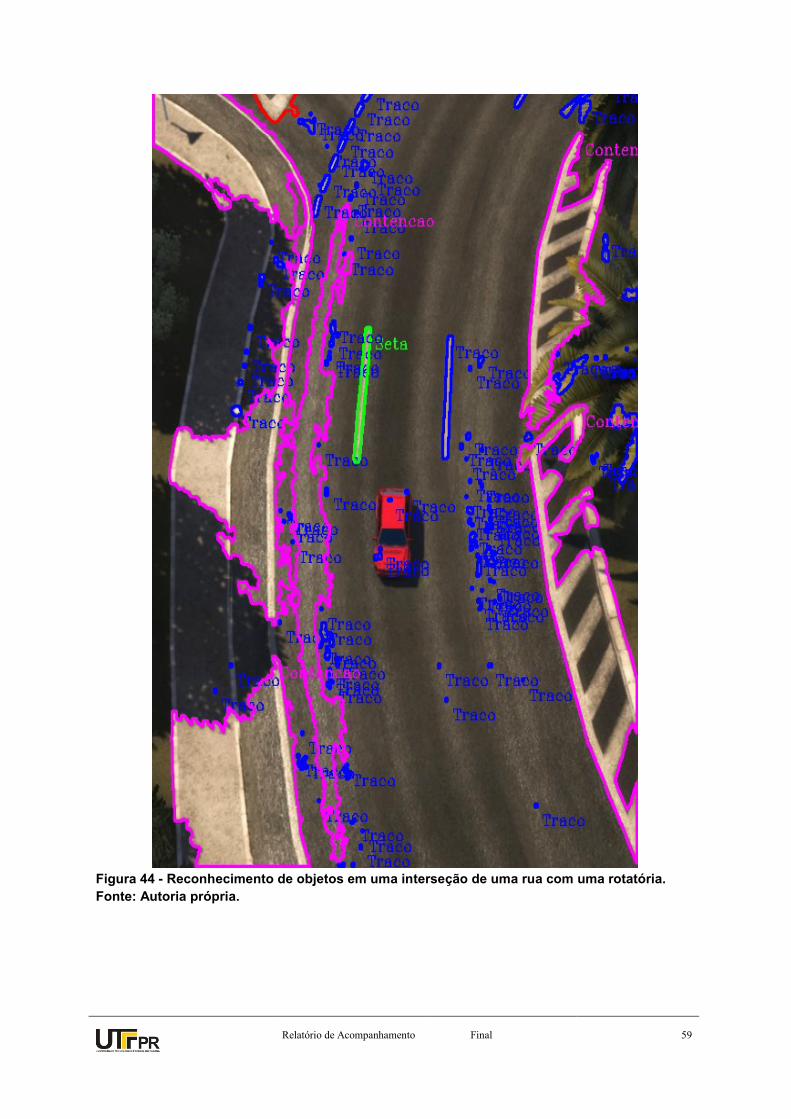
Relatório de Acompanhamento
Final
59
Figura 44 - Reconhecimento de objetos em uma interseção de uma rua com uma rotatória.
Fonte: Autoria própria.
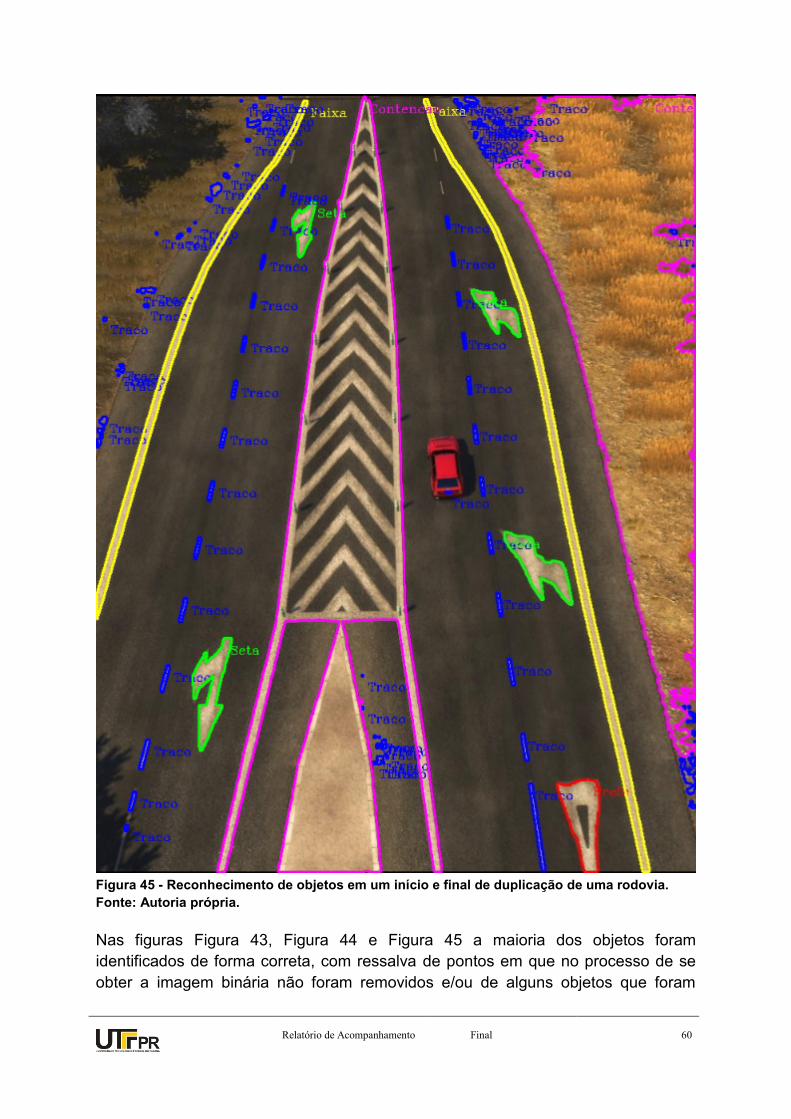
Relatório de Acompanhamento
Final
60
Figura 45 - Reconhecimento de objetos em um início e final de duplicação de uma rodovia.
Fonte: Autoria própria.
Nas figuras Figura 43, Figura 44 e Figura 45 a maioria dos objetos foram
identificados de forma correta, com ressalva de pontos em que no processo de se
obter a imagem binária não foram removidos e/ou de alguns objetos que foram
Relatório de Acompanhamento
Final
61
identificados de forma errônea, como é o caso da Figura 43, em que uma parte da
faixa foi reconhecida como faixa central tracejada, e a Figura 44 sendo uma parte
faixa central tracejada reconhecida como seta. Isso pode ter ocorrido por mal
treinamento do algoritmo o que pode ser melhorado com maior treinamento do
mesmo. Outra possibilidade, seria o fato dos objetos nas imagens não possuírem
tamanho constante, ocasionando erros no algoritmo.
O processo de identificação de objetos é de suma importância, pois para se
reconhecer falhas ou pontos de interesse, será utilizada essa técnica em conjunto
com outras. Os próximos passos a serem executados consistem em melhorar o
algoritmo de transformação da imagem binária e implementar outros algoritmos para
reconhecer objetos, pois é necessário comparar mais de um método e verificar qual
apresenta melhores resultados para o problema estudado.
Além do progresso obtido para efetuar o processamento das imagens, está sendo
desenvolvido um Web Site com banco de dados para efetuar o registro e
acompanhamento das atividades que forem executadas com o VANT. A Figura 46
apresenta a página para efetuar o login no site.
Figura 46 - Página de Login.
Fonte: Autoria própria.
Com o login efetuado, o usuário terá acesso as funções do Web Site. Como este é
um protótipo, as funções disponíveis são visualizar as informações do projeto, da
equipe e os relatórios parciais. Isso pode ser visualizado na Figura 47.
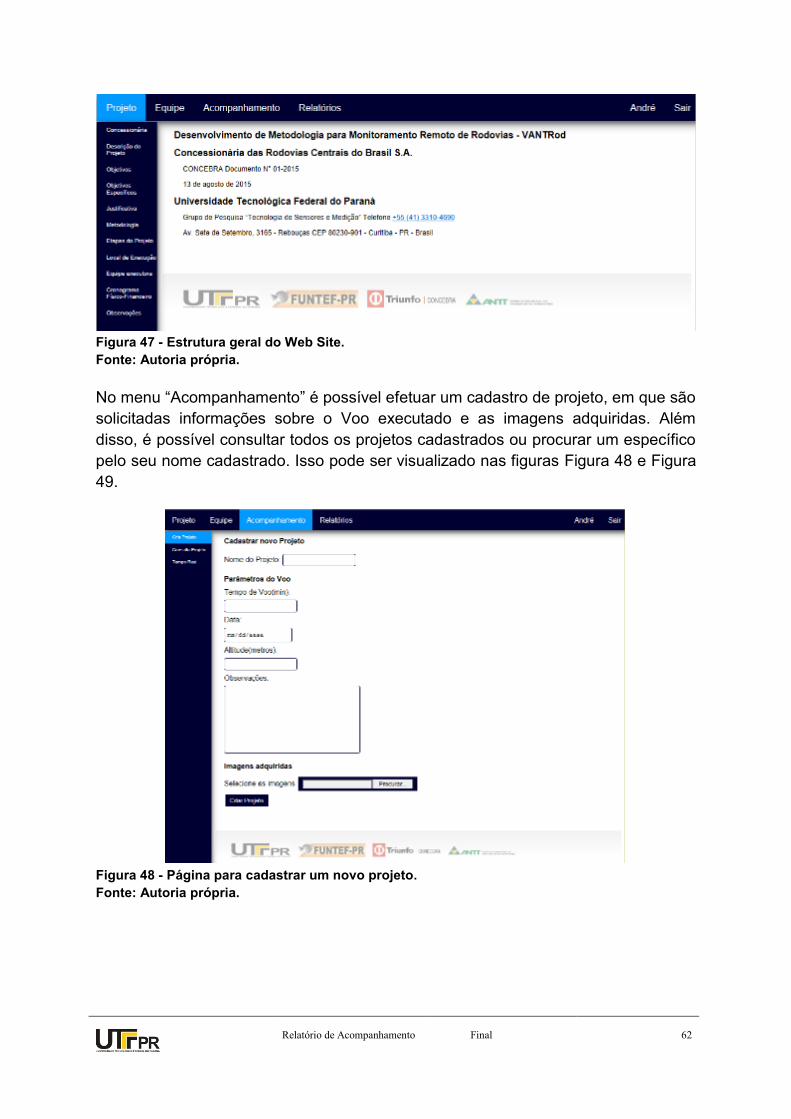
Relatório de Acompanhamento
Final
62
Figura 47 - Estrutura geral do Web Site.
Fonte: Autoria própria.
No menu “Acompanhamento” é possível efetuar um cadastro de projeto, em que são
solicitadas informações sobre o Voo executado e as imagens adquiridas. Além
disso, é possível consultar todos os projetos cadastrados ou procurar um específico
pelo seu nome cadastrado. Isso pode ser visualizado nas figuras Figura 48 e Figura
49.
Figura 48 - Página para cadastrar um novo projeto.
Fonte: Autoria própria.

Relatório de Acompanhamento
Final
63
Figura 49 - Página para consultar projetos arquivados.
Fonte: Autoria própria.
Ao encontrar o projeto desejado, o usuário pode utilizar o botão “Abrir” para
visualizar as informações do projeto. Com o projeto aberto, o usuário visualiza as
imagens armazenadas, a data em que foram retiradas e seu código de identificação.
A Figura 50 apresenta um projeto aberto. Como todas as imagens possuem
informações de geolocalização, é possível ler essas informações e mostrar em um
mapa o local em que as mesmas foram adquiridas. Assim, no final da página de
consulta, é apresentado um mapa com as informações de geolocalizalção de cada
imagem. Caso o usuário deseje verificar a qual pino marcado no mapa se refere
aquela imagem, é necessário somente clicar sobre o mesmo. Essas funções podem
ser visualizadas na Figura 51. Por fim, na aba acompanhamentos, é apresentado a
opção “Tempo Real”, para que possa ser visualizado resultados de processamentos
de vídeos adquiridos pelo Infraworks. Esses vídeos demonstram a execução do
algoritmo de reconhecimento desenvolvidos com a API OpenCV. Assim, a Figura 52
apresenta essa página aberta.
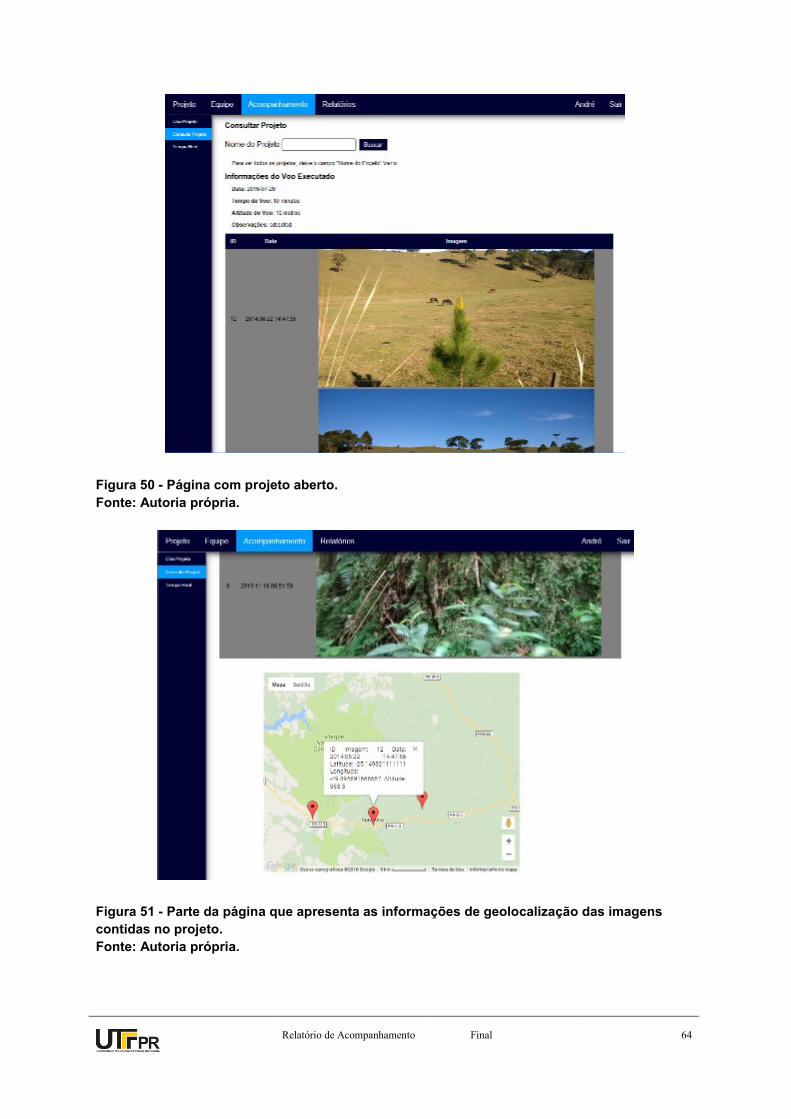
Relatório de Acompanhamento
Final
64
Figura 50 - Página com projeto aberto.
Fonte: Autoria própria.
Figura 51 - Parte da página que apresenta as informações de geolocalização das imagens
contidas no projeto.
Fonte: Autoria própria.
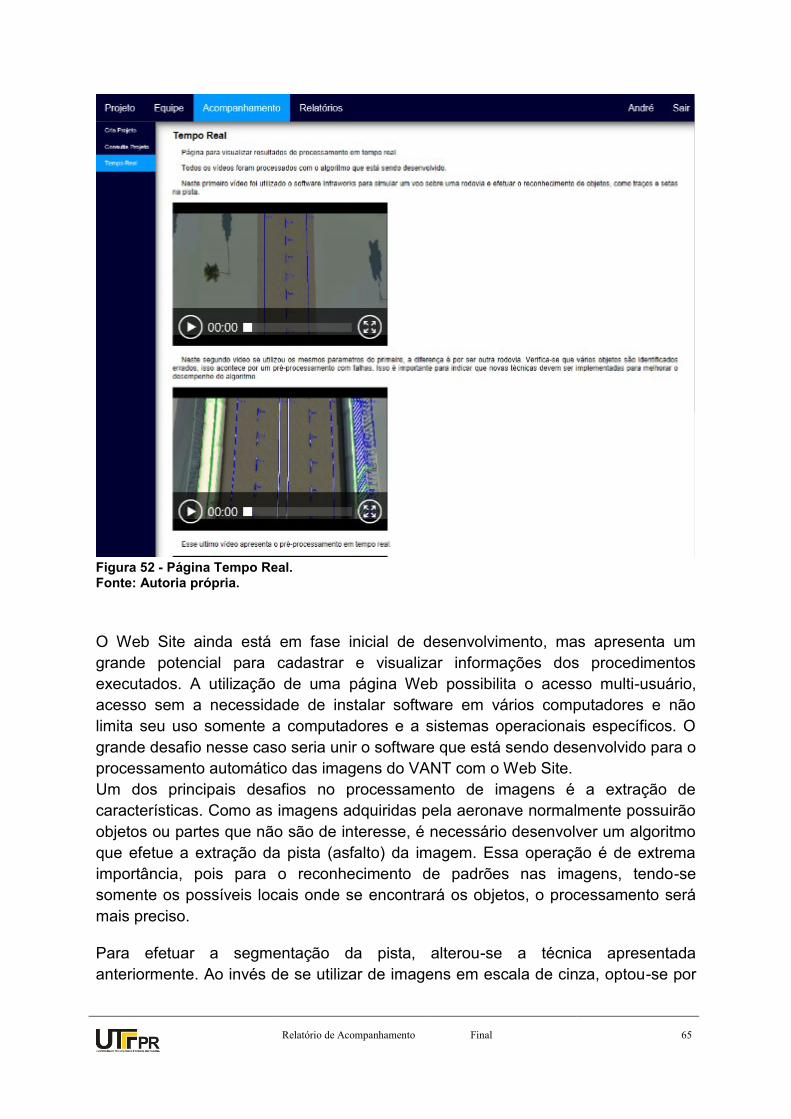
Relatório de Acompanhamento
Final
65
Figura 52 - Página Tempo Real. Fonte: Autoria própria.
O Web Site ainda está em fase inicial de desenvolvimento, mas apresenta um
grande potencial para cadastrar e visualizar informações dos procedimentos
executados. A utilização de uma página Web possibilita o acesso multi-usuário,
acesso sem a necessidade de instalar software em vários computadores e não
limita seu uso somente a computadores e a sistemas operacionais específicos. O
grande desafio nesse caso seria unir o software que está sendo desenvolvido para o
processamento automático das imagens do VANT com o Web Site.
Um dos principais desafios no processamento de imagens é a extração de
características. Como as imagens adquiridas pela aeronave normalmente possuirão
objetos ou partes que não são de interesse, é necessário desenvolver um algoritmo
que efetue a extração da pista (asfalto) da imagem. Essa operação é de extrema
importância, pois para o reconhecimento de padrões nas imagens, tendo-se
somente os possíveis locais onde se encontrará os objetos, o processamento será
mais preciso.
Para efetuar a segmentação da pista, alterou-se a técnica apresentada
anteriormente. Ao invés de se utilizar de imagens em escala de cinza, optou-se por
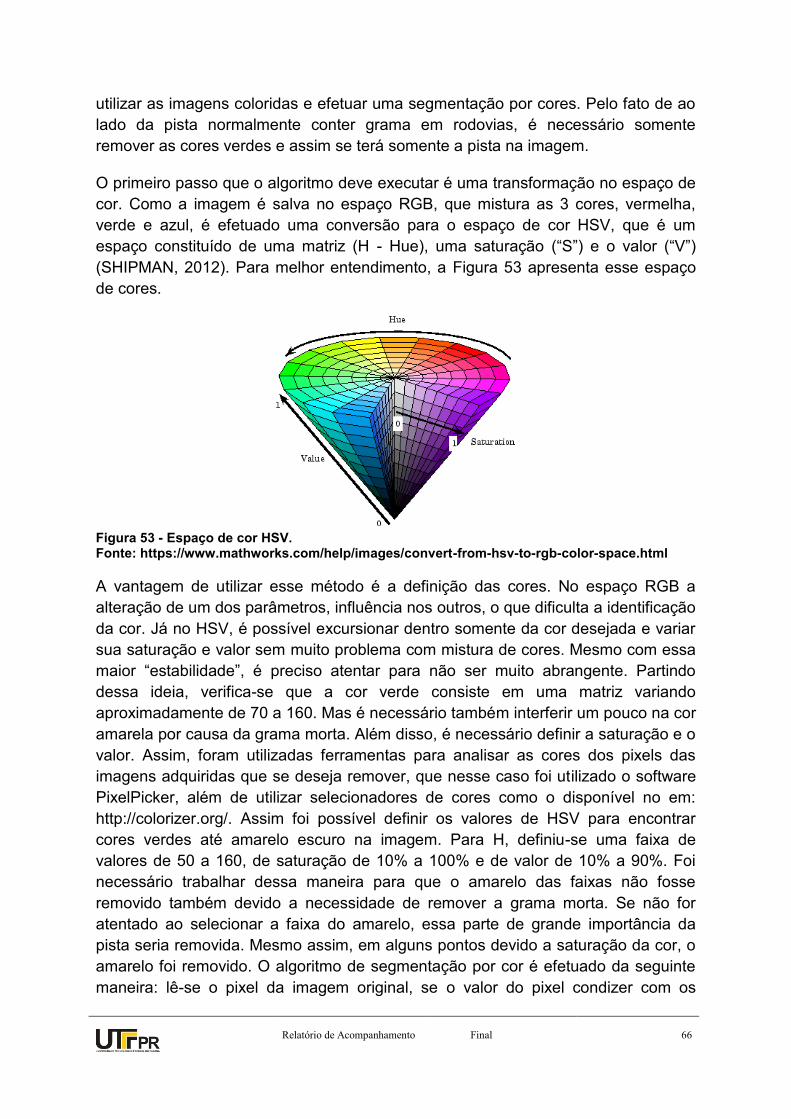
Relatório de Acompanhamento
Final
66
utilizar as imagens coloridas e efetuar uma segmentação por cores. Pelo fato de ao
lado da pista normalmente conter grama em rodovias, é necessário somente
remover as cores verdes e assim se terá somente a pista na imagem.
O primeiro passo que o algoritmo deve executar é uma transformação no espaço de
cor. Como a imagem é salva no espaço RGB, que mistura as 3 cores, vermelha,
verde e azul, é efetuado uma conversão para o espaço de cor HSV, que é um
espaço constituído de uma matriz (H - Hue), uma saturação (“S”) e o valor (“V”)
(SHIPMAN, 2012). Para melhor entendimento, a Figura 53 apresenta esse espaço
de cores.
Figura 53 - Espaço de cor HSV. Fonte: https://www.mathworks.com/help/images/convert-from-hsv-to-rgb-color-space.html
A vantagem de utilizar esse método é a definição das cores. No espaço RGB a
alteração de um dos parâmetros, influência nos outros, o que dificulta a identificação
da cor. Já no HSV, é possível excursionar dentro somente da cor desejada e variar
sua saturação e valor sem muito problema com mistura de cores. Mesmo com essa
maior “estabilidade”, é preciso atentar para não ser muito abrangente. Partindo
dessa ideia, verifica-se que a cor verde consiste em uma matriz variando
aproximadamente de 70 a 160. Mas é necessário também interferir um pouco na cor
amarela por causa da grama morta. Além disso, é necessário definir a saturação e o
valor. Assim, foram utilizadas ferramentas para analisar as cores dos pixels das
imagens adquiridas que se deseja remover, que nesse caso foi utilizado o software
PixelPicker, além de utilizar selecionadores de cores como o disponível no em:
http://colorizer.org/. Assim foi possível definir os valores de HSV para encontrar
cores verdes até amarelo escuro na imagem. Para H, definiu-se uma faixa de
valores de 50 a 160, de saturação de 10% a 100% e de valor de 10% a 90%. Foi
necessário trabalhar dessa maneira para que o amarelo das faixas não fosse
removido também devido a necessidade de remover a grama morta. Se não for
atentado ao selecionar a faixa do amarelo, essa parte de grande importância da
pista seria removida. Mesmo assim, em alguns pontos devido a saturação da cor, o
amarelo foi removido. O algoritmo de segmentação por cor é efetuado da seguinte
maneira: lê-se o pixel da imagem original, se o valor do pixel condizer com os
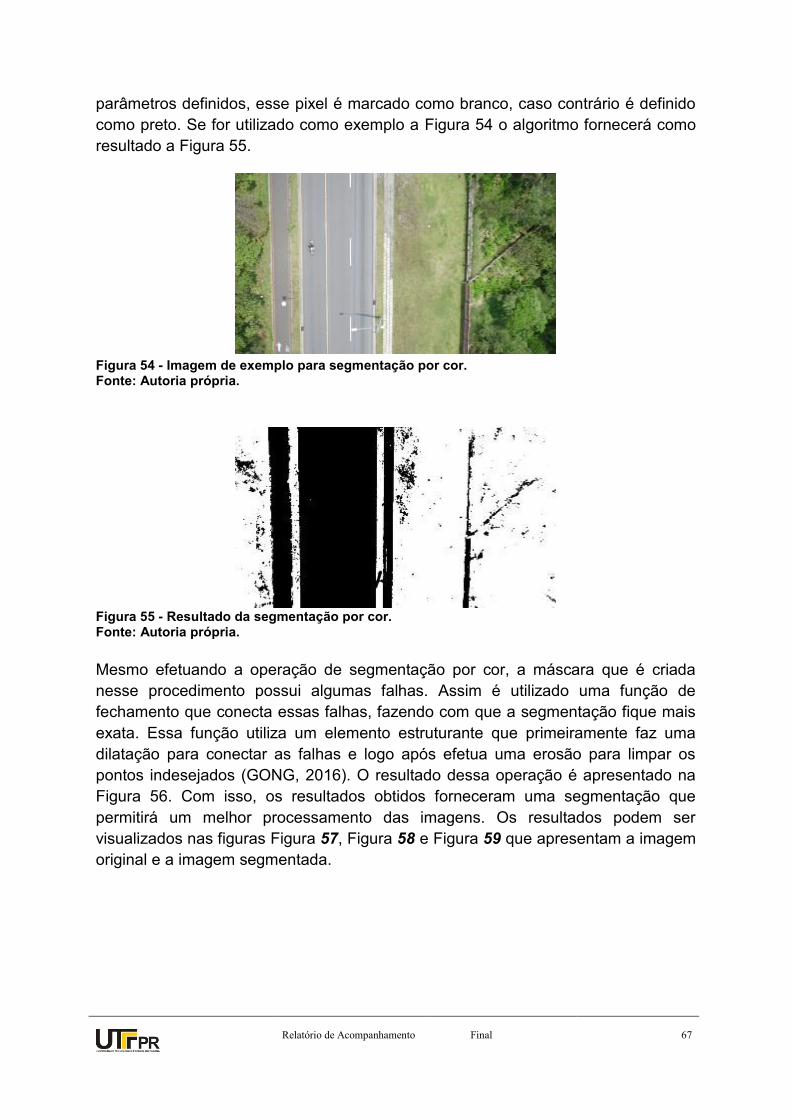
Relatório de Acompanhamento
Final
67
parâmetros definidos, esse pixel é marcado como branco, caso contrário é definido
como preto. Se for utilizado como exemplo a Figura 54 o algoritmo fornecerá como
resultado a Figura 55.
Figura 54 - Imagem de exemplo para segmentação por cor. Fonte: Autoria própria.
Figura 55 - Resultado da segmentação por cor. Fonte: Autoria própria.
Mesmo efetuando a operação de segmentação por cor, a máscara que é criada
nesse procedimento possui algumas falhas. Assim é utilizado uma função de
fechamento que conecta essas falhas, fazendo com que a segmentação fique mais
exata. Essa função utiliza um elemento estruturante que primeiramente faz uma
dilatação para conectar as falhas e logo após efetua uma erosão para limpar os
pontos indesejados (GONG, 2016). O resultado dessa operação é apresentado na
Figura 56. Com isso, os resultados obtidos forneceram uma segmentação que
permitirá um melhor processamento das imagens. Os resultados podem ser
visualizados nas figuras Figura 57, Figura 58 e Figura 59 que apresentam a imagem
original e a imagem segmentada.

Relatório de Acompanhamento
Final
68
Figura 56 - Resultado da função de fechamento da segmentação por cor. Fonte: Autoria própria.
Figura 57 - Imagem original acima e extração de asfalto abaixo. Fonte: Autoria própria.
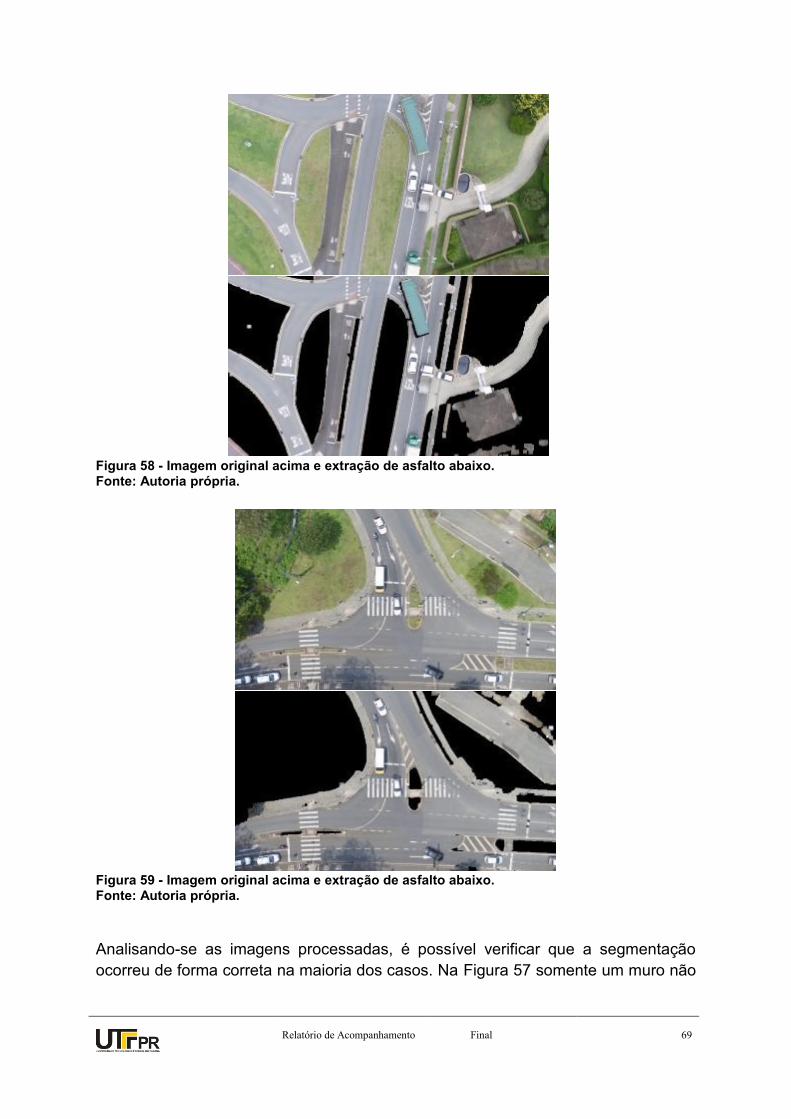
Relatório de Acompanhamento
Final
69
Figura 58 - Imagem original acima e extração de asfalto abaixo. Fonte: Autoria própria.
Figura 59 - Imagem original acima e extração de asfalto abaixo. Fonte: Autoria própria.
Analisando-se as imagens processadas, é possível verificar que a segmentação
ocorreu de forma correta na maioria dos casos. Na Figura 57 somente um muro não
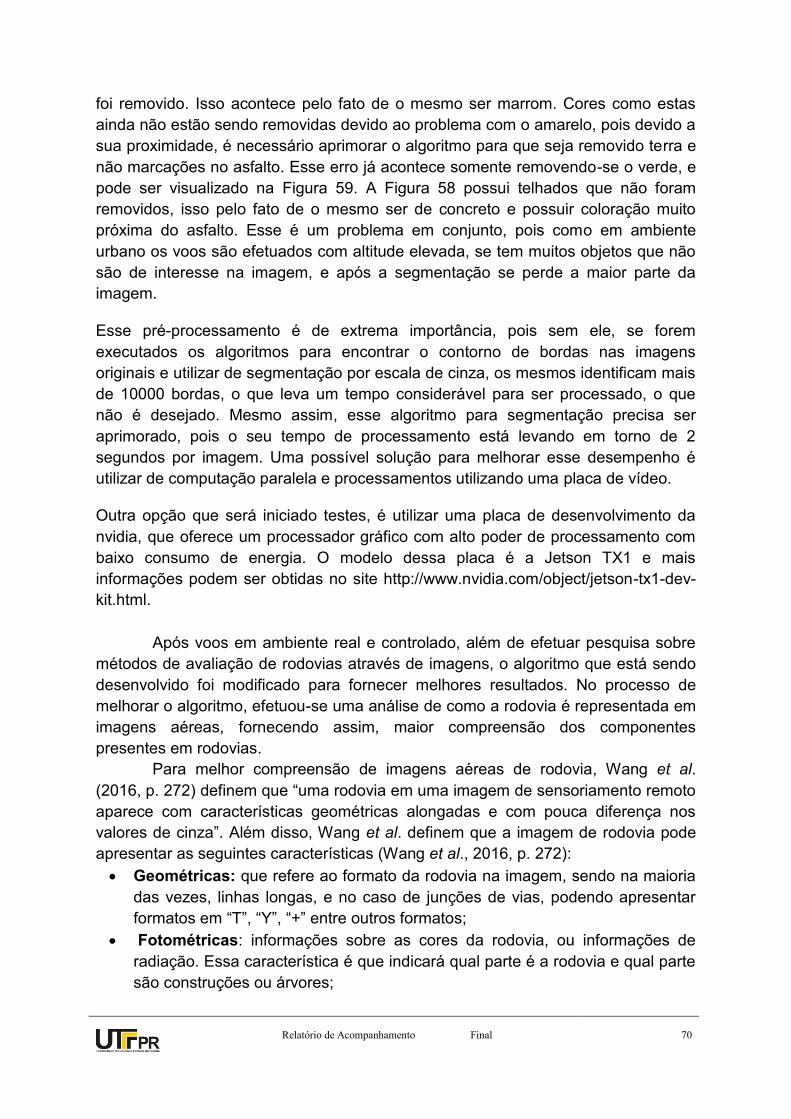
Relatório de Acompanhamento
Final
70
foi removido. Isso acontece pelo fato de o mesmo ser marrom. Cores como estas
ainda não estão sendo removidas devido ao problema com o amarelo, pois devido a
sua proximidade, é necessário aprimorar o algoritmo para que seja removido terra e
não marcações no asfalto. Esse erro já acontece somente removendo-se o verde, e
pode ser visualizado na Figura 59. A Figura 58 possui telhados que não foram
removidos, isso pelo fato de o mesmo ser de concreto e possuir coloração muito
próxima do asfalto. Esse é um problema em conjunto, pois como em ambiente
urbano os voos são efetuados com altitude elevada, se tem muitos objetos que não
são de interesse na imagem, e após a segmentação se perde a maior parte da
imagem.
Esse pré-processamento é de extrema importância, pois sem ele, se forem
executados os algoritmos para encontrar o contorno de bordas nas imagens
originais e utilizar de segmentação por escala de cinza, os mesmos identificam mais
de 10000 bordas, o que leva um tempo considerável para ser processado, o que
não é desejado. Mesmo assim, esse algoritmo para segmentação precisa ser
aprimorado, pois o seu tempo de processamento está levando em torno de 2
segundos por imagem. Uma possível solução para melhorar esse desempenho é
utilizar de computação paralela e processamentos utilizando uma placa de vídeo.
Outra opção que será iniciado testes, é utilizar uma placa de desenvolvimento da
nvidia, que oferece um processador gráfico com alto poder de processamento com
baixo consumo de energia. O modelo dessa placa é a Jetson TX1 e mais
informações podem ser obtidas no site http://www.nvidia.com/object/jetson-tx1-dev-
kit.html.
Após voos em ambiente real e controlado, além de efetuar pesquisa sobre
métodos de avaliação de rodovias através de imagens, o algoritmo que está sendo
desenvolvido foi modificado para fornecer melhores resultados. No processo de
melhorar o algoritmo, efetuou-se uma análise de como a rodovia é representada em
imagens aéreas, fornecendo assim, maior compreensão dos componentes
presentes em rodovias.
Para melhor compreensão de imagens aéreas de rodovia, Wang et al.
(2016, p. 272) definem que “uma rodovia em uma imagem de sensoriamento remoto
aparece com características geométricas alongadas e com pouca diferença nos
valores de cinza”. Além disso, Wang et al. definem que a imagem de rodovia pode
apresentar as seguintes características (Wang et al., 2016, p. 272):
Geométricas: que refere ao formato da rodovia na imagem, sendo na maioria
das vezes, linhas longas, e no caso de junções de vias, podendo apresentar
formatos em “T”, “Y”, “+” entre outros formatos;
Fotométricas: informações sobre as cores da rodovia, ou informações de
radiação. Essa característica é que indicará qual parte é a rodovia e qual parte
são construções ou árvores;
Relatório de Acompanhamento
Final
71
Topológicas: são referentes ao formato da rodovia, sendo que uma rodovia é
contínua e sem interrupções;
Funcionais: são condições necessárias que possibilitem o tráfego de veículos
em uma rodovia;
Textura: diferentes partes da rodovia podem possuir texturas diferentes como,
por exemplo, partes com pavimento novo ou locais com partes mais
desgastadas que podem apresentar variações nas colorações dos pixels.
Além dessas características Baumgartner et al., (1999) propuseram um
modelo de como uma rodovia é representada em uma imagem aérea. Este modelo,
em conjunto com as caraterísticas descritas, facilita o entendimento de como a
rodovia e seus componentes são apresentados em imagem aérea. A Figura 60
apresenta o modelo proposto por Baumgartner e colaboradores.
Figura 60 - Modelo de uma rodovia em imagens aéreas. Esse modelo apresenta características
da rodovia como um todo (escala abrangente) e de seus componentes (escala fina). Cada
bloco do modelo apresenta uma característica da rodovia.
Fonte: Adaptado de Baumgartner et al., (1999, p. 779)
A partir das características e do modelo de uma rodovia em imagens aéreas
apresentadas, foi definida uma metodologia de processamento das imagens
adquiridas pela câmera acoplada ao VANT para obter como produto final a
classificação de objetos na rodovia. A partir do conjunto de imagens adquiridas foi
desenvolvido um algoritmo que emprega técnicas de processamento digital de
imagens (PDI) para extrair as informações necessárias e classifica-las através de
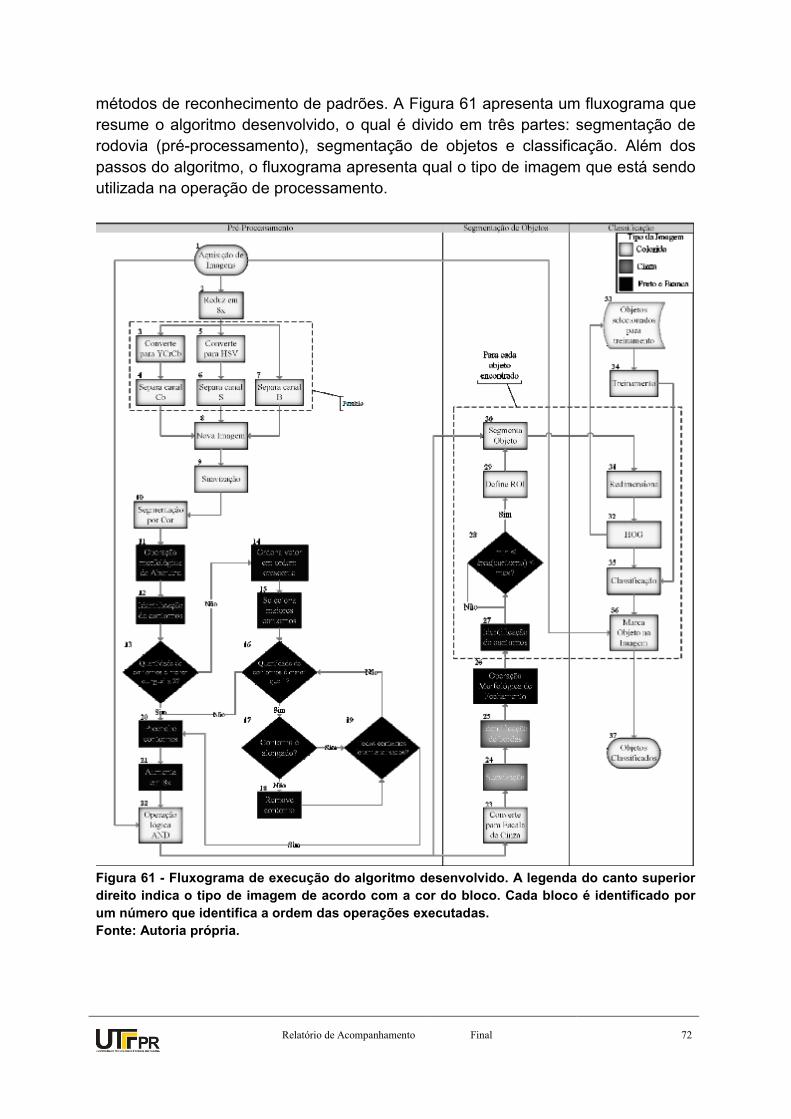
Relatório de Acompanhamento
Final
72
métodos de reconhecimento de padrões. A Figura 61 apresenta um fluxograma que
resume o algoritmo desenvolvido, o qual é divido em três partes: segmentação de
rodovia (pré-processamento), segmentação de objetos e classificação. Além dos
passos do algoritmo, o fluxograma apresenta qual o tipo de imagem que está sendo
utilizada na operação de processamento.
Figura 61 - Fluxograma de execução do algoritmo desenvolvido. A legenda do canto superior
direito indica o tipo de imagem de acordo com a cor do bloco. Cada bloco é identificado por
um número que identifica a ordem das operações executadas.
Fonte: Autoria própria.
Relatório de Acompanhamento
Final
73
3.7.1 Pré-processamento
Após aquisição das imagens (bloco 1 no fluxograma) é necessário efetuar
um pré-processamento para segmentar da imagem a rodovia, retirando outros
objetos que não são de interesse. A execução desse procedimento será através de
segmentação por cor, aplicação de operações morfológicas e análise da geometria
dos segmentos indicados como rodovia. O trabalho desenvolvido por Jin e Feng
(2010), o modelo de rodovia proposto por Baumgartner et al. (1999) e as
características apresentadas por Wang et al. (2016) serão a base no
desenvolvimento desta etapa. Para melhor compreensão, a Figura 64 apresenta a
resposta das etapas de pré-processamento do algoritmo. A imagem de exemplo
submetida ao algoritmo está apresentada na Figura 64 (1).
A primeira tarefa que o algoritmo executa é redimensionar a imagem de
entrada (bloco 2), reduzindo em 8 vezes com interpolação dos novos pixels,
resultando na Figura 64 (2). Se comparada com a Figura 64 (1) é possível verificar
que detalhes finos foram danificados, sendo considerada uma característica de
imagem com baixa resolução. De acordo com as características da rodovia
apresentadas a região pavimentada possui grande dimensão e como nesta etapa
não se tem interesse em detalhes finos, a segmentação da rodovia é efetuada com
imagem de baixa resolução. Essa operação tem o principal objetivo de reduzir o
tempo de processamento do algoritmo nas etapas subsequentes. Uma vez que
maior parte do ambiente da rodovia está envolvida por vegetação, possuindo pouca
variação nos valores de cinza e brilho intenso, a segmentação da pista será iniciada
com uma análise das cores da imagem. A partir do trabalho desenvolvido por Jin e
Feng (2010), utiliza-se a ideia proposta pelos pesquisadores de separar os canais
de cores, proporcionando melhor análise, e nas próximas etapas é efetuado a
alteração do sistema de cores da imagem RGB para b rYC C (bloco 3) e HSV (bloco
5). A Figura 62 apresenta como cada espaço de cor é representado. Seguindo ainda
a técnica proposta por Jin e Feng (2010), separados os canais de cores é formada
uma nova imagem com as informações mais relevantes sobre o asfalto, composta
de canais distintos entre os espaços de cores (bloco 8).
Pelo fato de áreas de vegetação possuírem baixo valor de cores azul no
sistema RGB (JIN; FENG, 2010), esse canal é separado da imagem (bloco 7) e está
apresentado na Figura 64 (7). Esse princípio também é utilizado na imagem no
espaço de cores b rYC C , onde é separado o componente “ bC ” (bloco 4) que
representa a diferença entre o brilho e a cor azul, que pode ser visualizado na
Figura 64 (4) (BEYERER; PUENTE LEÓN; FRESE, 2016a). Como a imagem no
HSV apresenta as intensidades de cores separadamente e uma via pavimentada
possui baixo valor de saturação (JIN; FENG, 2010), esse canal é separado da
imagem (bloco 6), apresentado na Figura 64 (6). Com três canais que identificam e
distinguem a vegetação da pavimentação, é formada uma nova imagem com a

Relatório de Acompanhamento
Final
74
união desses três canais (bloco 8) que proporcionará melhor distinção entre asfalto
e vegetação. O resultado dessa operação é demonstrado pela Figura 64 (8).
Figura 62 - Espaços de cores utilizados pelo algoritmo. (a) Espaço de cor RGB representado
por um cubo, onde cada canal varia entre 0 e 255. (b) Espaço de cores HSV representado por
um cone. O canal H desse espaço varia de 0 a 360°, o canal S de 0 a 100 assim como o canal
V. (c) Espaço de cores YC Crbonde cada canal do espaço varia entre 0 e 1.
Fonte: Adaptado de https://commons.wikimedia.org/wiki/File:RGB_color_cube.svg. e Russ e
Neal, (2016a, p. 24).
Gerada a nova imagem é efetuada a segmentação da rodovia através de
análise de cores. Porém, é possível verificar na Figura 64 (8) que objetos dentro da
rodovia apresentam coloração diferenciada se comparada com a via. Como esses
pontos seriam desconsiderados na segmentação da rodovia é necessário unir os
mesmo ao segmento de rodovia. Logo, no próximo passo, a imagem é suavizada
com um filtro da média com máscara 9 x 9 (bloco 9) (GONZALEZ; WOODS, 2010).
Esse procedimento pode ser visualizado na Figura 64 (9). Suavizada a imagem, a
segmentação por cores é efetuada através de lógica fuzzy da imagem no espaço
HSV (bloco 10) (CAPONETTI; CASTELLANO, 2017a). Antes da segmentação por
Relatório de Acompanhamento
Final
75
cores é necessária uma análise de quais cores se deseja identificar na nova
imagem. Só então é verificado as funções de pertinência definidas na Figura 63,
escolhendo a partir da cor que se deseja segmentar, os valores das funções de
pertinência que identificarão a cor a ser segmentada. Para segmentar a rodovia,
analisou-se as partes da nova imagem formada e verificou-se que os segmentos de
rodovia apresentam coloração magenta com saturação e valor maior que 50. Com
essas informações define-se a seguinte condição para segmentar a rodovia
270 330 50 100 50 100SE H S V , onde quando esta for satisfeita, então
a cor magenta foi encontrada. Essa condição será verificada em cada pixel da
imagem fornecida. Satisfeita a condição proposta, marca-se o pixel como 1, caso
contrário como 0, formando uma imagem binária. O resultado desse processamento
pode ser visualizado na Figura 64 (10).
Com a imagem binária fornecida pela segmentação é efetuada a operação
morfológica de abertura (BEYERER; PUENTE LEÓN; FRESE, 2016b; GONZALEZ;
WOODS, 2010) com elemento estruturante (ES) retangular (bloco 11) com
dimensões 9 x 3 pixels, sendo o resultado apresentado na Figura 64 (11), que
eliminará pontos indesejados preservando segmentos de rodovia identificados. O
formato de ES escolhido leva em consideração as características da rodovia, onde
os segmentos de rodovia são descritos com características geométricas alongadas,
semelhante a um retângulo (BAUMGARTNER et al., 1999). Entretanto, nem todos
os pontos indesejados são removidos. No processo de segmentação por cores, e
por exemplo, estacionamentos em áreas urbanas podem ser considerados
segmentos de rodovia, o que não é um ponto de interesse. Para melhorar a
distinção entre segmentos de rodovia e partes que não são de interesse, é efetuado
análise na geometria dos segmentos encontrados. Nesta análise é utilizado o
contorno da rodovia segmentada (bloco 12), apresentado na Figura 64 (12), sendo
verificado se a quantidade de contornos encontrados é menor ou igual a 2. Caso
seja encontrado dois ou um segmento de rodovia, é considerado que a imagem é
constituída somente de segmentos de rodovia (bloco 13). A definição da quantidade
de segmentos, é dada pelo fato de rodovias duplicadas apresentarem dois
segmentos, vias simples e interseções apresentarem um segmento. Caso contrário,
o vetor que possui os contornos de segmentos de via pavimentada encontrados, é
reordenado em ordem decrescente (bloco 14). Isso é efetuado para que na próxima
etapa, seja selecionado os maiores contornos encontrados. Então, o vetor é
percorrido até encontrar a maior diferença entre os elementos do vetor (bloco 15).
Quando essa diferença for encontrada, define-se que os valores antes do índice da
diferença encontrada, possuem os maiores valores. Então, os itens restantes, são
removidos, pois estes não são considerados segmentos de estrada. Com o vetor
contendo somente informações desejadas, primeiro é verificado se a quantidade de
objetos restantes é maior que 1 (bloco 16). Se a condição for falsa, a imagem
contém somente segmentos de rodovia e o algoritmo segue para o bloco 20. Caso
contrário, é verificado a proporção entre largura e altura de cada objeto restante no
Relatório de Acompanhamento
Final
76
vetor (bloco 17). Caso algum objeto não tenha uma proporção menor que 0,9 entre
largura e altura, esse não é considerado um segmento de rodovia e o mesmo é
removido (bloco 18). Esse valor foi definido a partir de testes experimentais, onde se
o valor for muito baixo, segmentos de rodovia com conexões são desconsiderados.
Sendo aceita a condição de proporção, é verificado se todos os contornos já foram
analisados (bloco 19) e caso seja positiva essa resposta, a etapa de verificação de
geometria está encerrada, do contrário, o programa retorna ao bloco 16, para
verificar as informações restantes.
Ao término da análise de geometria, os contornos definidos como
segmentos de rodovia, são preenchidos (bloco 20) para que se possa ao final do
procedimento, segmentar a rodovia da imagem original. O resultado do
preenchimento está demonstrado na Figura 64 (20). Além disso, para que essa
segmentação seja efetuada, é necessário ainda aumentar a imagem com os
segmentos de rodovia para o seu tamanho original (bloco 21). Por fim, para se obter
imagem contendo somente a rodovia, é efetuado a operação lógica “E” entre a
imagem original e a imagem binária dos segmentos encontrados (bloco 22)
segmentando assim, a rodovia da imagem. Este resultado está apresentado na
Figura 64 (22). Com uma imagem contendo somente a rodovia, onde é possível
identificar com mais precisão objetos sob a rodovia.
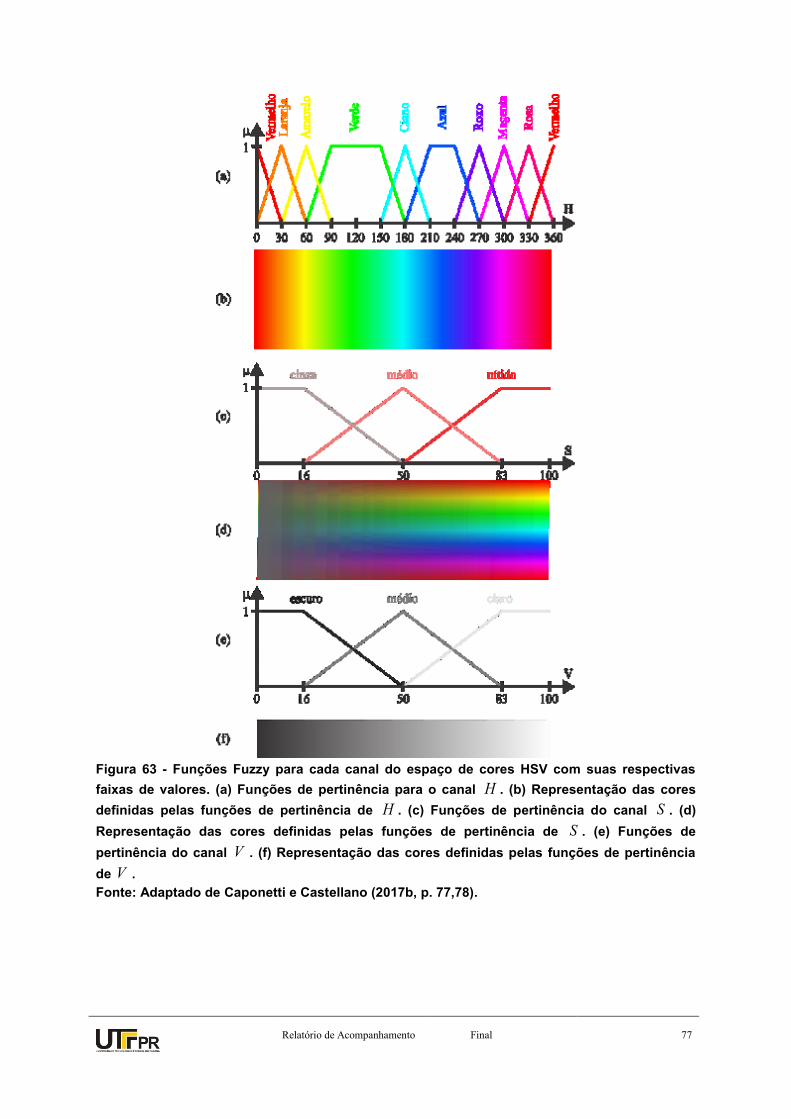
Relatório de Acompanhamento
Final
77
Figura 63 - Funções Fuzzy para cada canal do espaço de cores HSV com suas respectivas
faixas de valores. (a) Funções de pertinência para o canal H . (b) Representação das cores
definidas pelas funções de pertinência de H . (c) Funções de pertinência do canal S . (d)
Representação das cores definidas pelas funções de pertinência de S . (e) Funções de
pertinência do canal V . (f) Representação das cores definidas pelas funções de pertinência
de V .
Fonte: Adaptado de Caponetti e Castellano (2017b, p. 77,78).
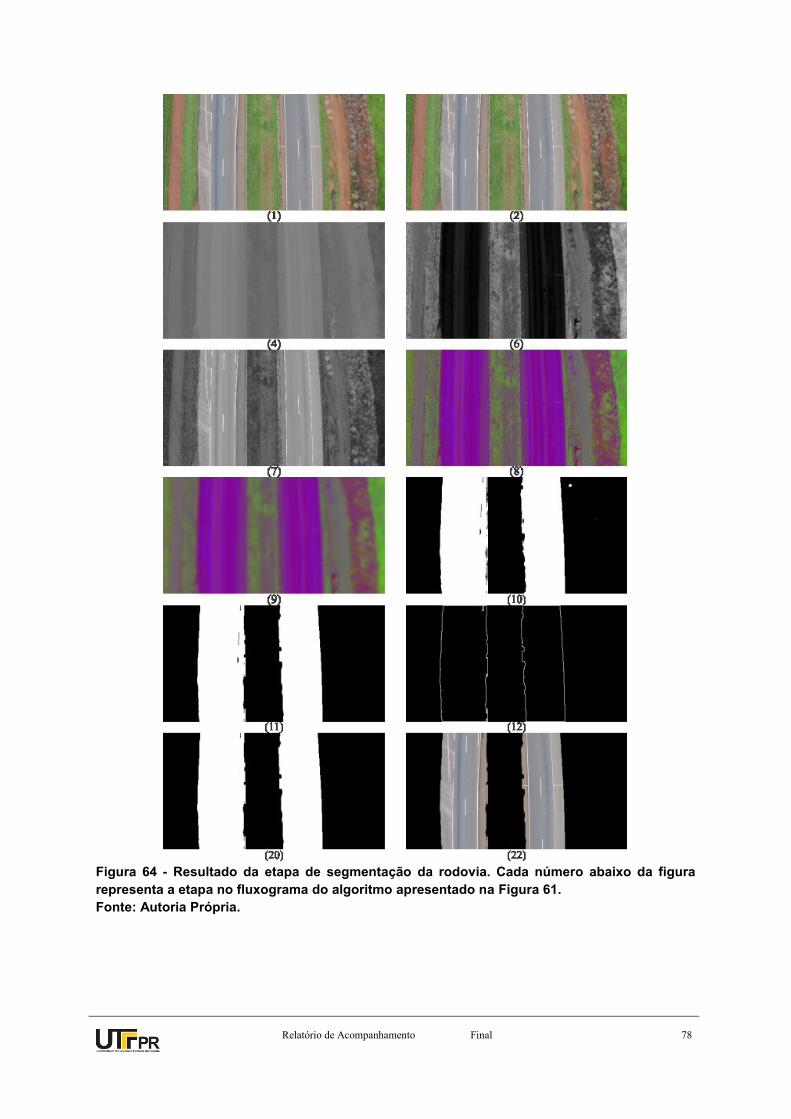
Relatório de Acompanhamento
Final
78
Figura 64 - Resultado da etapa de segmentação da rodovia. Cada número abaixo da figura
representa a etapa no fluxograma do algoritmo apresentado na Figura 61.
Fonte: Autoria Própria.
Relatório de Acompanhamento
Final
79
3.7.2 Segmentação de objetos
Concluída a etapa de segmentação da rodovia é iniciado o processo para
identificar e segmentar objetos contidos na rodovia. A abordagem empregada na
execução desta tarefa será utilizar as bordas dos objetos. Portanto, o primeiro passo
executado é converter a imagem para escala de cinza (bloco 23). Para maior
compreensão será utilizado como exemplo o resultado da segmentação da rodovia
apresentado na Figura 64, onde o número entre parênteses após a figura, é a etapa
que está sendo executada pelo algoritmo, apresentado no fluxograma da Figura 61.
Assim, a Figura 65 (23) apresentada a rodovia segmentada convertida em escala de
cinza. A partir dessa imagem, é aplicado filtro de suavização da média com
dimensão 5 x 5 para remover ruídos de aquisição da imagem original (bloco 24)
representado o resultado na Figura 65 (24). A não remoção desse ruído pode
originar identificação de pontos falsos na execução do algoritmo de identificação de
bordas.
Na próxima etapa é empregado o algoritmo de Canny que identificará
bordas dos objetos (bloco 25). Os limiares necessários para a execução do
algoritmo foram definidos como sendo 15LT e 3H LT T , seguindo a sugestão de
Canny (GONZALEZ; WOODS, 2010). O resultado da aplicação do algoritmo pode
ser visualizado na Figura 65 (25). No entanto é possível verificar que os contornos
encontrados pelo algoritmo podem apresentar desconexões. Este problema é
solucionado aplicando-se a operação morfológica de fechamento (bloco 26) com
elemento estruturante retangular e dimensões 6 x 2 pixels, que conectará as bordas
dos objetos (Figura 65 (26)).
Como é desejado classificar os objetos após sua segmentação, necessita-
se que seja segmentado em conjunto do objeto, informações ao seu entorno,
incrementando assim, suas características. Então será definido a região de
interesse – Region of Interest (ROI) (bloco 29) que marcará cada objeto encontrado
na imagem da rodovia segmentada. Uma maneira de definir a ROI é a partir da
borda do objeto, selecionar os pontos extremos (superior e lateral direito) e definir
um retângulo no entorno do objeto. Com essa técnica será possível segmentar o
objeto em conjunto com o ambiente que o mesmo está inserido.
No entanto antes é necessário extrair e analisar os contornos dos objetos
encontrados (blocos 27 e 28). Os contornos encontrados na imagem de exemplo
estão apresentados na Figura 65 (27). Com a análise dos contornos é possível
descartar possíveis objetos fora da área de interesse. Essa análise é efetuada a
partir da área do objeto. Se a área não estiver em uma faixa definida o objeto é
descartado, sendo analisado o próximo objeto (bloco 28). Do contrário é definido a
ROI do objeto encontrado. Esse procedimento pode ser visualizado na Figura 65
(30) onde os objetos estão envolvidos por um retângulo azul.
Definida a ROI a partir do contorno do objeto, o mesmo será segmentado da
imagem da rodovia segmentada (bloco 30), sendo esse procedimento efetuado para
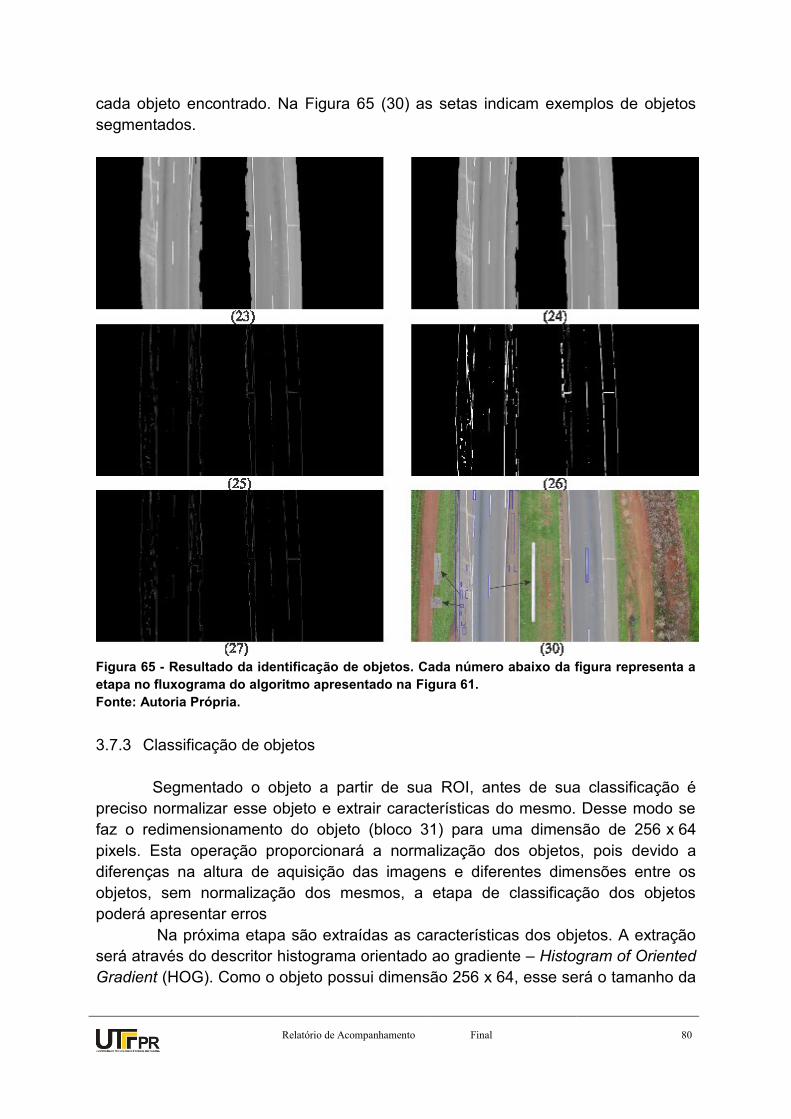
Relatório de Acompanhamento
Final
80
cada objeto encontrado. Na Figura 65 (30) as setas indicam exemplos de objetos
segmentados.
Figura 65 - Resultado da identificação de objetos. Cada número abaixo da figura representa a
etapa no fluxograma do algoritmo apresentado na Figura 61.
Fonte: Autoria Própria.
3.7.3 Classificação de objetos
Segmentado o objeto a partir de sua ROI, antes de sua classificação é
preciso normalizar esse objeto e extrair características do mesmo. Desse modo se
faz o redimensionamento do objeto (bloco 31) para uma dimensão de 256 x 64
pixels. Esta operação proporcionará a normalização dos objetos, pois devido a
diferenças na altura de aquisição das imagens e diferentes dimensões entre os
objetos, sem normalização dos mesmos, a etapa de classificação dos objetos
poderá apresentar erros
Na próxima etapa são extraídas as características dos objetos. A extração
será através do descritor histograma orientado ao gradiente – Histogram of Oriented
Gradient (HOG). Como o objeto possui dimensão 256 x 64, esse será o tamanho da
Relatório de Acompanhamento
Final
81
janela do HOG. Com base no trabalho desenvolvido por Dalal e Triggs (2005), o
parâmetro célula é definido com tamanho 8 x 8 pixels, o tamanho do bloco como
sendo 16 x 16 (4 blocos de 8 células) e 9 orientações bins. Com esses parâmetros
definidos, cada objeto encontrado na imagem terá o seu HOG calculado (bloco 32).
Antes da etapa de classificação é necessário definir as classes e selecionar
um conjunto de objetos para treinamento do método de reconhecimento de padrões
(bloco 33). Neste trabalho serão utilizadas 5 classes: setas, traços, carros, palavras
e falhas. A seleção do conjunto de treinamento é efetuada a partir de várias
imagens, em ambientes distintos, com o maior número de objetos. Além disso, pelo
fato de o HOG ser variável a direção do objeto (DALAL; TRIGGS, 2005), no
procedimento de treinamento é efetuado três rotações nesses objetos: 90°, 180° e
270°, para que desta forma possa ser diminuído problemas devido a direção dos
objetos, pois nos voos doHOG , os objetos não possuem uma direção fixa. Esse
processo aumenta o conjunto de treinamento em 3 vezes.
Após a seleção dos objetos de cada classe o algoritmo de classificação
SVM é treinado (bloco 34) (DUDA; HART; STORK, 2001). Essa etapa de separação
de objetos e treinamento é executado antes da execução do algoritmo. Entretanto
antes de utilizar o classificador são necessários alguns voos para adquirir imagens,
segmentar objetos e assim ser possível treinar o classificador. No fluxograma
(Figura 61) existe uma seta que mostra a conexão entre o processo de cálculo do
HOG (bloco 32) com os objetos selecionados (bloco 33). Essa conexão é somente
demonstrativa de como ocorre o procedimento de seleção e treinamento. Na
execução do algoritmo, esse procedimento não ocorre, avançando diretamente ao
bloco 35.
Treinado o algoritmo, a classificação ocorre quando o HOG da ROI
redimensionada é informada ao algoritmo (bloco 35). Classificado o objeto pelo
algoritmo SVM, o mesmo é marcado na imagem original, indicando sua classe
através do contorno do objeto com cor especifica para sua classe (bloco 36). Com
todos os objetos classificados (bloco 37), o algoritmo encerra e retorna ao bloco 2,
reiniciando todo o processo. Ao término dessas operações o resultado obtido será o
vídeo contendo os objetos identificados e classificados na rodovia.
Após testes de segmentação de objetos, um conjunto destes objetos
segmentados pelo algoritmo foram separados para treinamento do método de
reconhecimento de padrões. A Tabela 5 apresenta a quantidade de objetos
utilizados no treinamento de cada classe e a Figura 66 apresenta alguns dos objetos
de cada classe. É importante ressaltar que, devido ao descritor HOG ser sensível a
direção, cada objeto teve rotação de 90°, 180° e 270°, multiplicando assim a
quantidade de objetos por 4.
Tabela 5 - Quantidade de objetos por classe utilizado para treinamento e teste e quantidade
total após a rotação de cada objeto.
Classe Quantidade de Objetos
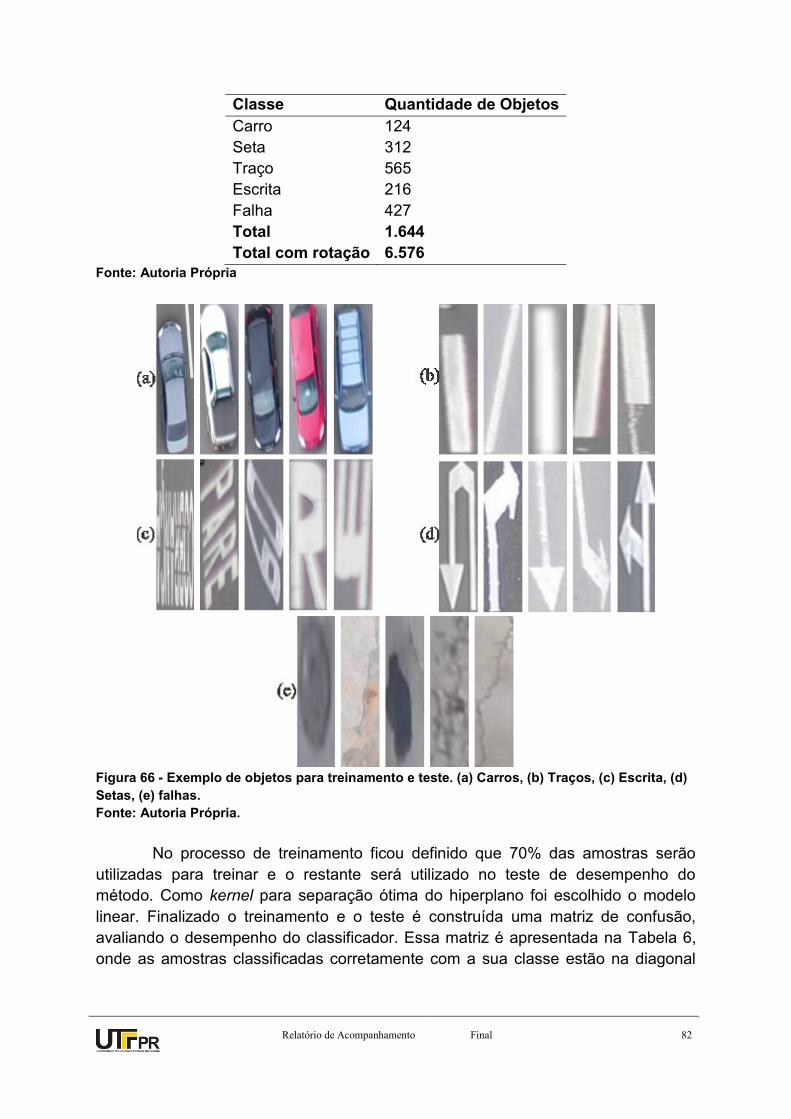
Relatório de Acompanhamento
Final
82
Classe Quantidade de Objetos
Carro 124
Seta 312
Traço 565
Escrita 216
Falha 427
Total 1.644
Total com rotação 6.576
Fonte: Autoria Própria
Figura 66 - Exemplo de objetos para treinamento e teste. (a) Carros, (b) Traços, (c) Escrita, (d)
Setas, (e) falhas.
Fonte: Autoria Própria.
No processo de treinamento ficou definido que 70% das amostras serão
utilizadas para treinar e o restante será utilizado no teste de desempenho do
método. Como kernel para separação ótima do hiperplano foi escolhido o modelo
linear. Finalizado o treinamento e o teste é construída uma matriz de confusão,
avaliando o desempenho do classificador. Essa matriz é apresentada na Tabela 6,
onde as amostras classificadas corretamente com a sua classe estão na diagonal
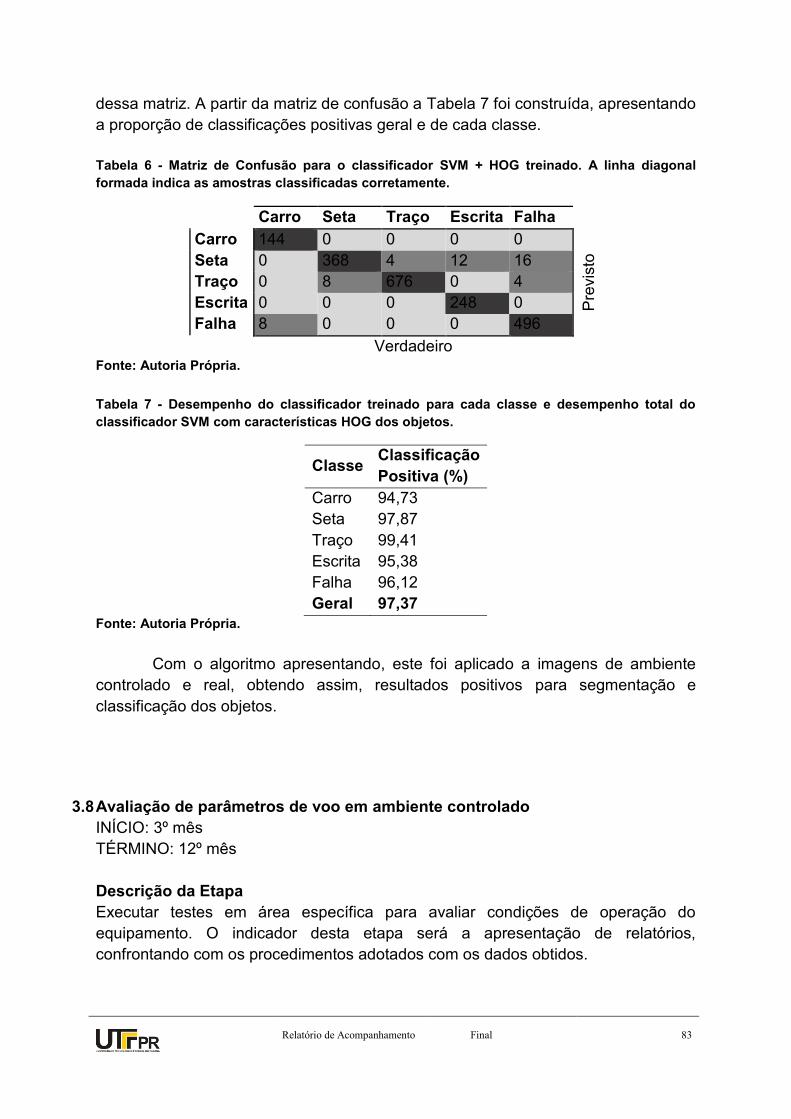
Relatório de Acompanhamento
Final
83
dessa matriz. A partir da matriz de confusão a Tabela 7 foi construída, apresentando
a proporção de classificações positivas geral e de cada classe.
Tabela 6 - Matriz de Confusão para o classificador SVM + HOG treinado. A linha diagonal
formada indica as amostras classificadas corretamente.
Carro Seta Traço Escrita Falha
Carro 144 0 0 0 0
Pre
vis
to
Seta 0 368 4 12 16
Traço 0 8 676 0 4
Escrita 0 0 0 248 0
Falha 8 0 0 0 496
Verdadeiro
Fonte: Autoria Própria.
Tabela 7 - Desempenho do classificador treinado para cada classe e desempenho total do
classificador SVM com características HOG dos objetos.
Classe Classificação
Positiva (%)
Carro 94,73
Seta 97,87
Traço 99,41
Escrita 95,38
Falha 96,12
Geral 97,37
Fonte: Autoria Própria.
Com o algoritmo apresentando, este foi aplicado a imagens de ambiente
controlado e real, obtendo assim, resultados positivos para segmentação e
classificação dos objetos.
3.8 Avaliação de parâmetros de voo em ambiente controlado
INÍCIO: 3º mês
TÉRMINO: 12º mês
Descrição da Etapa
Executar testes em área específica para avaliar condições de operação do
equipamento. O indicador desta etapa será a apresentação de relatórios,
confrontando com os procedimentos adotados com os dados obtidos.
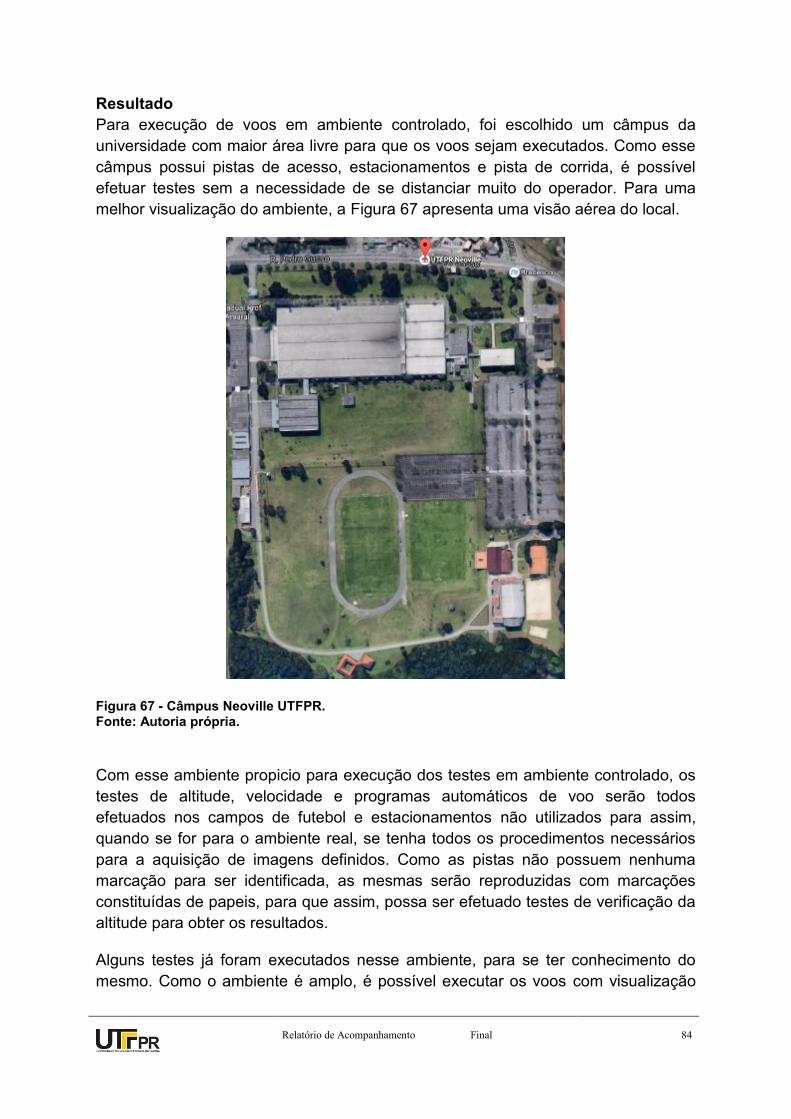
Relatório de Acompanhamento
Final
84
Resultado
Para execução de voos em ambiente controlado, foi escolhido um câmpus da
universidade com maior área livre para que os voos sejam executados. Como esse
câmpus possui pistas de acesso, estacionamentos e pista de corrida, é possível
efetuar testes sem a necessidade de se distanciar muito do operador. Para uma
melhor visualização do ambiente, a Figura 67 apresenta uma visão aérea do local.
Figura 67 - Câmpus Neoville UTFPR. Fonte: Autoria própria.
Com esse ambiente propicio para execução dos testes em ambiente controlado, os
testes de altitude, velocidade e programas automáticos de voo serão todos
efetuados nos campos de futebol e estacionamentos não utilizados para assim,
quando se for para o ambiente real, se tenha todos os procedimentos necessários
para a aquisição de imagens definidos. Como as pistas não possuem nenhuma
marcação para ser identificada, as mesmas serão reproduzidas com marcações
constituídas de papeis, para que assim, possa ser efetuado testes de verificação da
altitude para obter os resultados.
Alguns testes já foram executados nesse ambiente, para se ter conhecimento do
mesmo. Como o ambiente é amplo, é possível executar os voos com visualização
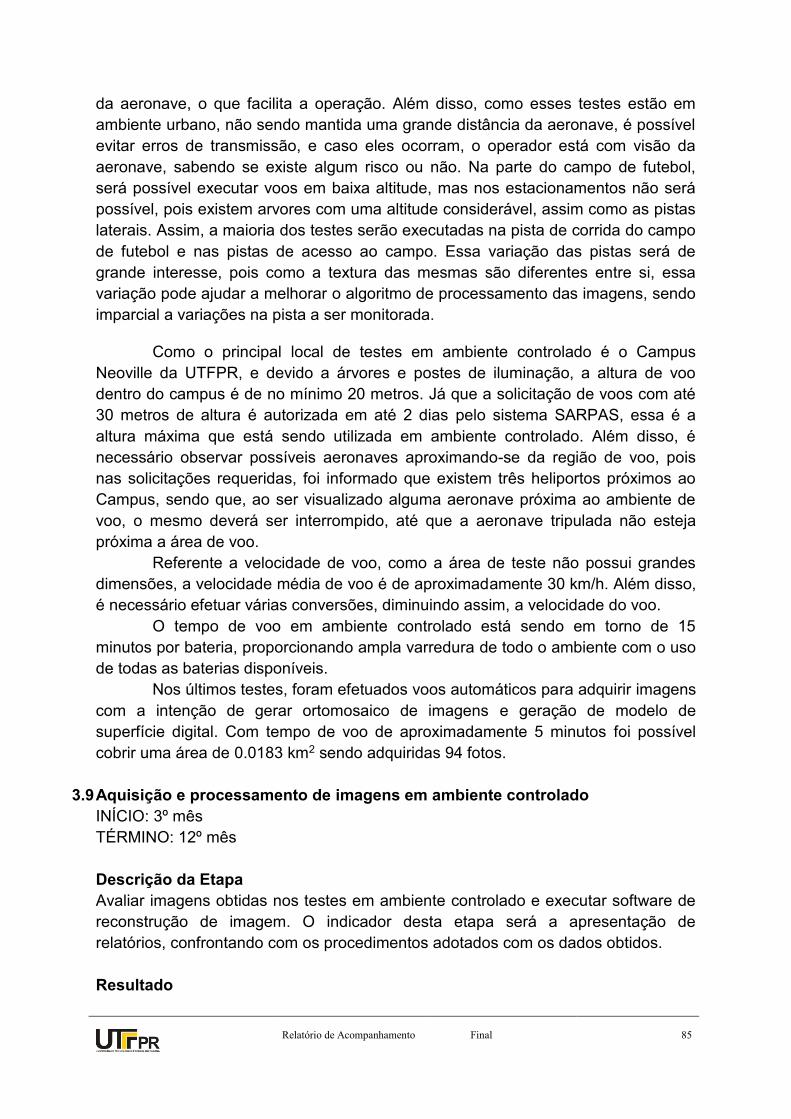
Relatório de Acompanhamento
Final
85
da aeronave, o que facilita a operação. Além disso, como esses testes estão em
ambiente urbano, não sendo mantida uma grande distância da aeronave, é possível
evitar erros de transmissão, e caso eles ocorram, o operador está com visão da
aeronave, sabendo se existe algum risco ou não. Na parte do campo de futebol,
será possível executar voos em baixa altitude, mas nos estacionamentos não será
possível, pois existem arvores com uma altitude considerável, assim como as pistas
laterais. Assim, a maioria dos testes serão executadas na pista de corrida do campo
de futebol e nas pistas de acesso ao campo. Essa variação das pistas será de
grande interesse, pois como a textura das mesmas são diferentes entre si, essa
variação pode ajudar a melhorar o algoritmo de processamento das imagens, sendo
imparcial a variações na pista a ser monitorada.
Como o principal local de testes em ambiente controlado é o Campus
Neoville da UTFPR, e devido a árvores e postes de iluminação, a altura de voo
dentro do campus é de no mínimo 20 metros. Já que a solicitação de voos com até
30 metros de altura é autorizada em até 2 dias pelo sistema SARPAS, essa é a
altura máxima que está sendo utilizada em ambiente controlado. Além disso, é
necessário observar possíveis aeronaves aproximando-se da região de voo, pois
nas solicitações requeridas, foi informado que existem três heliportos próximos ao
Campus, sendo que, ao ser visualizado alguma aeronave próxima ao ambiente de
voo, o mesmo deverá ser interrompido, até que a aeronave tripulada não esteja
próxima a área de voo.
Referente a velocidade de voo, como a área de teste não possui grandes
dimensões, a velocidade média de voo é de aproximadamente 30 km/h. Além disso,
é necessário efetuar várias conversões, diminuindo assim, a velocidade do voo.
O tempo de voo em ambiente controlado está sendo em torno de 15
minutos por bateria, proporcionando ampla varredura de todo o ambiente com o uso
de todas as baterias disponíveis.
Nos últimos testes, foram efetuados voos automáticos para adquirir imagens
com a intenção de gerar ortomosaico de imagens e geração de modelo de
superfície digital. Com tempo de voo de aproximadamente 5 minutos foi possível
cobrir uma área de 0.0183 km2 sendo adquiridas 94 fotos.
3.9 Aquisição e processamento de imagens em ambiente controlado
INÍCIO: 3º mês
TÉRMINO: 12º mês
Descrição da Etapa
Avaliar imagens obtidas nos testes em ambiente controlado e executar software de
reconstrução de imagem. O indicador desta etapa será a apresentação de
relatórios, confrontando com os procedimentos adotados com os dados obtidos.
Resultado
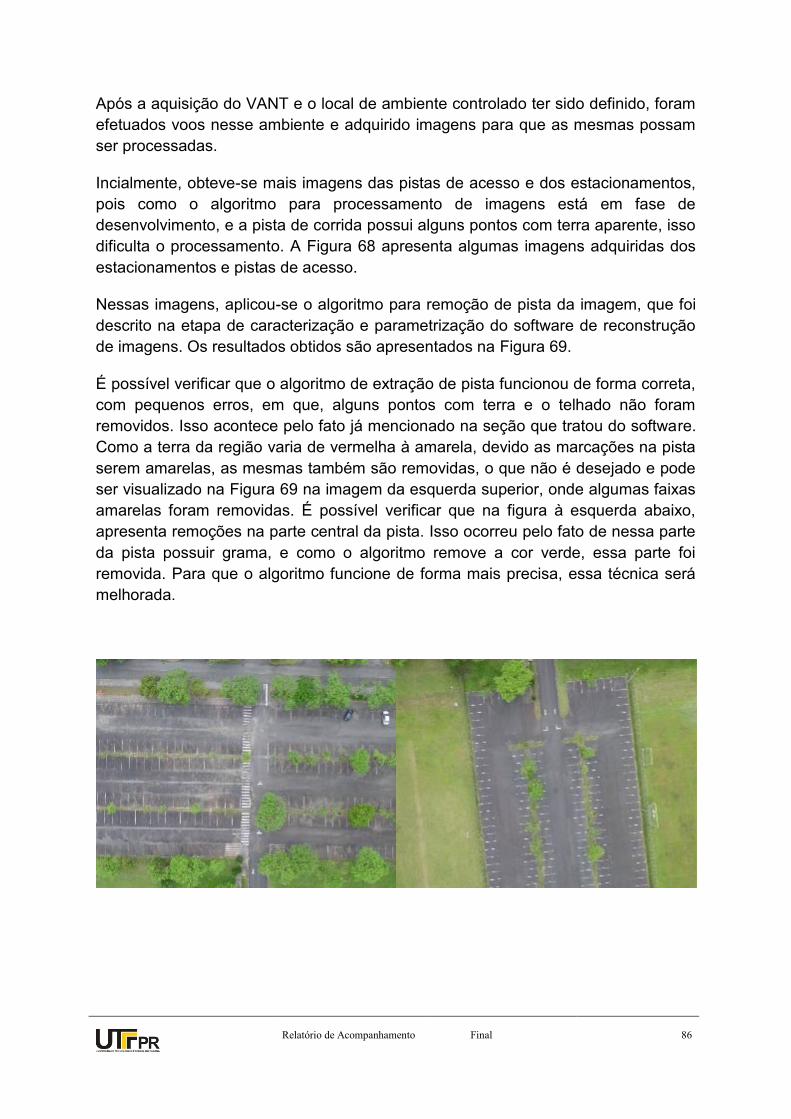
Relatório de Acompanhamento
Final
86
Após a aquisição do VANT e o local de ambiente controlado ter sido definido, foram
efetuados voos nesse ambiente e adquirido imagens para que as mesmas possam
ser processadas.
Incialmente, obteve-se mais imagens das pistas de acesso e dos estacionamentos,
pois como o algoritmo para processamento de imagens está em fase de
desenvolvimento, e a pista de corrida possui alguns pontos com terra aparente, isso
dificulta o processamento. A Figura 68 apresenta algumas imagens adquiridas dos
estacionamentos e pistas de acesso.
Nessas imagens, aplicou-se o algoritmo para remoção de pista da imagem, que foi
descrito na etapa de caracterização e parametrização do software de reconstrução
de imagens. Os resultados obtidos são apresentados na Figura 69.
É possível verificar que o algoritmo de extração de pista funcionou de forma correta,
com pequenos erros, em que, alguns pontos com terra e o telhado não foram
removidos. Isso acontece pelo fato já mencionado na seção que tratou do software.
Como a terra da região varia de vermelha à amarela, devido as marcações na pista
serem amarelas, as mesmas também são removidas, o que não é desejado e pode
ser visualizado na Figura 69 na imagem da esquerda superior, onde algumas faixas
amarelas foram removidas. É possível verificar que na figura à esquerda abaixo,
apresenta remoções na parte central da pista. Isso ocorreu pelo fato de nessa parte
da pista possuir grama, e como o algoritmo remove a cor verde, essa parte foi
removida. Para que o algoritmo funcione de forma mais precisa, essa técnica será
melhorada.
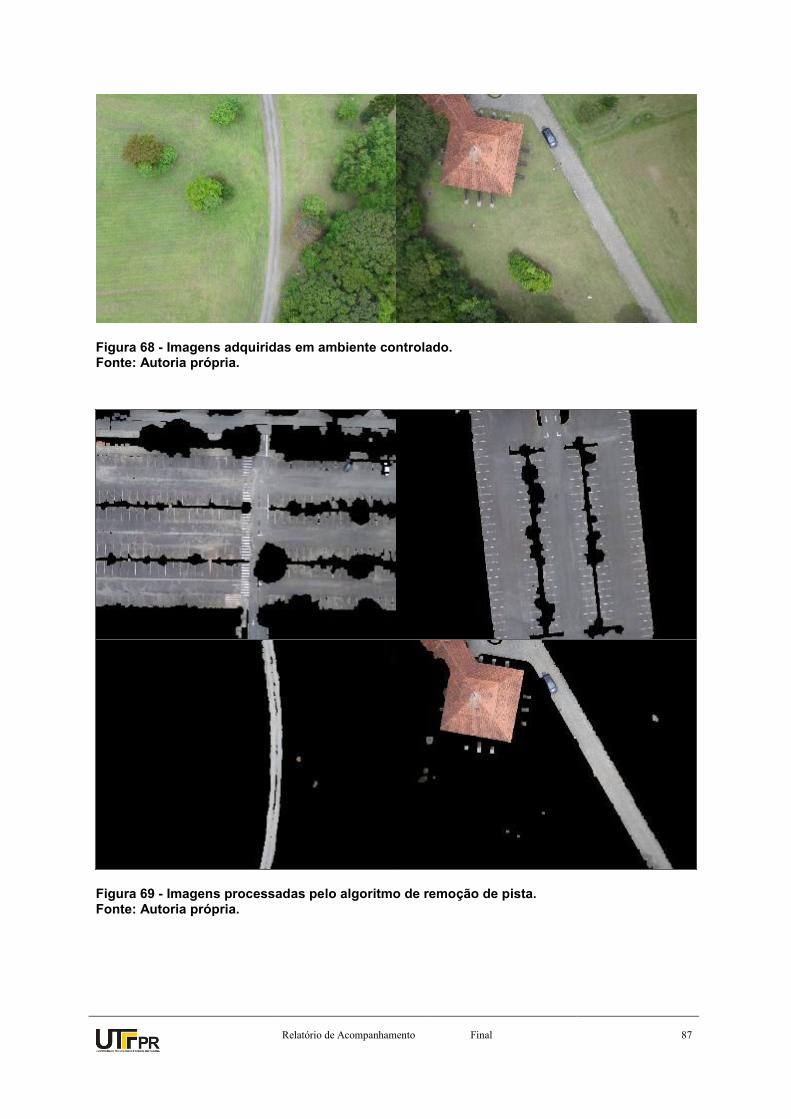
Relatório de Acompanhamento
Final
87
Figura 68 - Imagens adquiridas em ambiente controlado. Fonte: Autoria própria.
Figura 69 - Imagens processadas pelo algoritmo de remoção de pista. Fonte: Autoria própria.
Relatório de Acompanhamento
Final
88
O próximo passo no ambiente controlado será posicionar objetos nas pistas, para
que os mesmos sejam reconhecidos. Como a pista não possui marcações já
prontas, as mesmas serão criadas para que assim os testes sejam concretizados.
3.7 Avaliação de parâmetros de voo em ambiente real
INÍCIO: 11º mês
TÉRMINO: 22º mês
Descrição da Etapa
Executar procedimentos de voo em ambiente real e avaliar pontos de interesse pré-
determinados. O indicador desta etapa será a apresentação de relatórios,
confrontando com os procedimentos adotados com os dados obtidos.
Resultado
Essa etapa está sendo iniciada, sendo, primeiramente, definido o local de execução
e os pontos de interesse que se deseja verificar nesse local. Como o ambiente real
de operação da aeronave será em rodovias, é necessário encontrar um local que
possua pontos de interesse para que aquisições de ambientes reais sejam
executadas. Nesse caso, se dará preferência por rodovias com pouca
movimentação para que assim possa se extrair somente a rodovia, pois como
mencionado nas etapas anteriores, devido a necessidade de efetuar voos com uma
altitude considerável, se obtém muitos pontos que não são de interesse, dificultando
o processamento das imagens. Assim, essa etapa terá a sua evolução conforme os
voos com o VANT forem executados.
Pelo fato de o ambiente controlado não possuir boas marcações horizontais
e as mesmas não estarem seguindo as normas do Departamento Nacional de
Infraestrutura e transporte (DNIT), foram confeccionadas algumas setas a partir de
normas propostas pelo DNIT que estão no Manual de sinalização rodoviária
(DEPARTAMENTO NACIONAL DE INFRAESTRUTURA E TRASPORTE;
EXECUTIVA; RODOVIÁRIAS, 2010). Então, essas marcações foram posicionadas
no ambiente e teste em que as imagens adquiridas possuíssem as marcações
desenvolvidas.
Após aquisição, o algoritmo desenvolvido foi executado. Na primeira
execução, foi analisado a etapa de segmentação de objetos. A Figura 70 apresenta
frames do vídeo adquirido com as marcações confeccionadas e as marcações já
presentes no ambiente. A cada objeto encontrado pelo algoritmo, este é marcado
por um retângulo azul, que indica a sua ROI. Como além voos, foram adquiridas
imagens para que fosse gerado um ortomosaico do ambiente que está sendo
monitorado, a Figura 71 apresenta o ortomosaico gerado e os objetos identificados
nessa imagem. Para gerar o mosaico de imagens, foi utilizado o software Pix4D
(PIX4D, 2017) A imagem gerada possui resolução de 15982 x 12667 pixels. É
possível verificar vários retângulos azuis sem nenhum objeto. Esses retângulos são
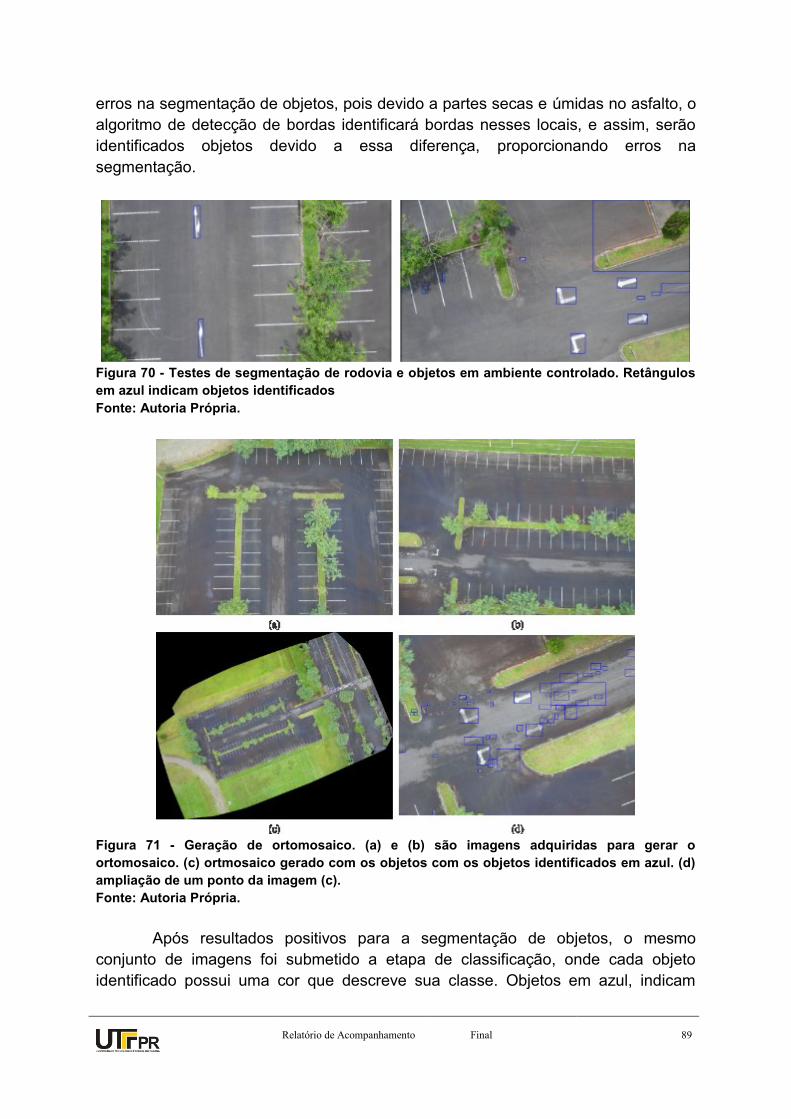
Relatório de Acompanhamento
Final
89
erros na segmentação de objetos, pois devido a partes secas e úmidas no asfalto, o
algoritmo de detecção de bordas identificará bordas nesses locais, e assim, serão
identificados objetos devido a essa diferença, proporcionando erros na
segmentação.
Figura 70 - Testes de segmentação de rodovia e objetos em ambiente controlado. Retângulos
em azul indicam objetos identificados
Fonte: Autoria Própria.
Figura 71 - Geração de ortomosaico. (a) e (b) são imagens adquiridas para gerar o
ortomosaico. (c) ortmosaico gerado com os objetos com os objetos identificados em azul. (d)
ampliação de um ponto da imagem (c).
Fonte: Autoria Própria.
Após resultados positivos para a segmentação de objetos, o mesmo
conjunto de imagens foi submetido a etapa de classificação, onde cada objeto
identificado possui uma cor que descreve sua classe. Objetos em azul, indicam
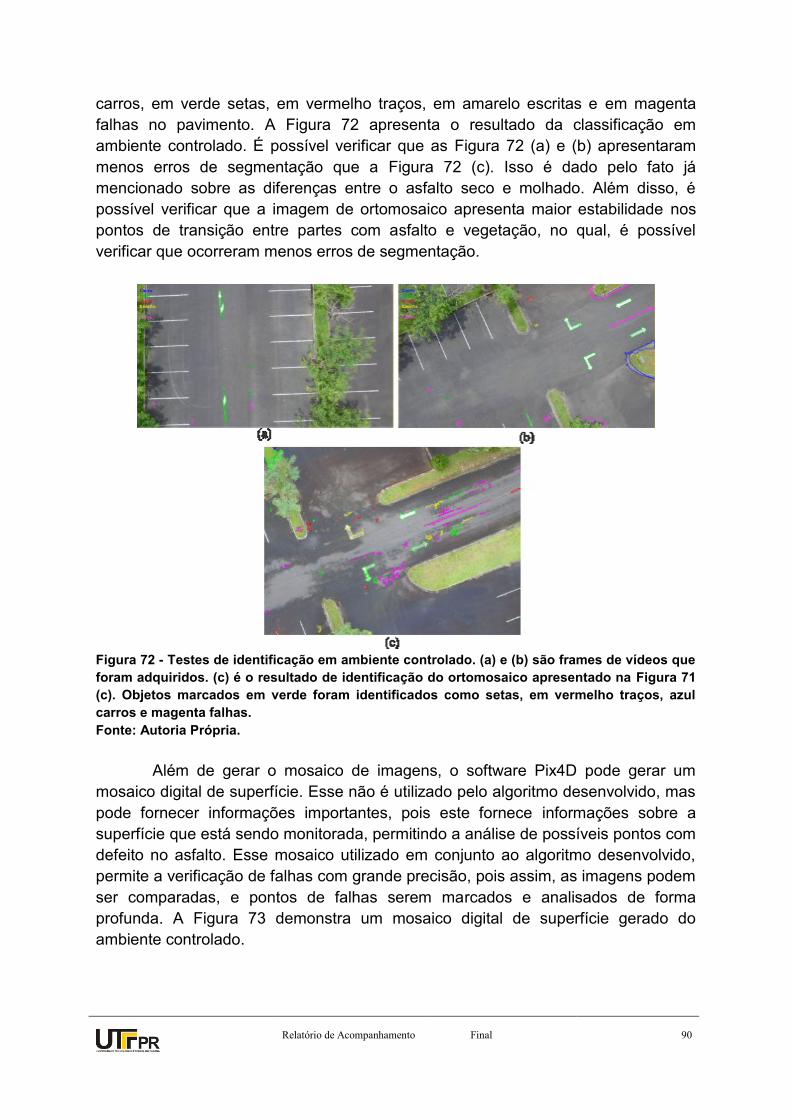
Relatório de Acompanhamento
Final
90
carros, em verde setas, em vermelho traços, em amarelo escritas e em magenta
falhas no pavimento. A Figura 72 apresenta o resultado da classificação em
ambiente controlado. É possível verificar que as Figura 72 (a) e (b) apresentaram
menos erros de segmentação que a Figura 72 (c). Isso é dado pelo fato já
mencionado sobre as diferenças entre o asfalto seco e molhado. Além disso, é
possível verificar que a imagem de ortomosaico apresenta maior estabilidade nos
pontos de transição entre partes com asfalto e vegetação, no qual, é possível
verificar que ocorreram menos erros de segmentação.
Figura 72 - Testes de identificação em ambiente controlado. (a) e (b) são frames de vídeos que
foram adquiridos. (c) é o resultado de identificação do ortomosaico apresentado na Figura 71
(c). Objetos marcados em verde foram identificados como setas, em vermelho traços, azul
carros e magenta falhas.
Fonte: Autoria Própria.
Além de gerar o mosaico de imagens, o software Pix4D pode gerar um
mosaico digital de superfície. Esse não é utilizado pelo algoritmo desenvolvido, mas
pode fornecer informações importantes, pois este fornece informações sobre a
superfície que está sendo monitorada, permitindo a análise de possíveis pontos com
defeito no asfalto. Esse mosaico utilizado em conjunto ao algoritmo desenvolvido,
permite a verificação de falhas com grande precisão, pois assim, as imagens podem
ser comparadas, e pontos de falhas serem marcados e analisados de forma
profunda. A Figura 73 demonstra um mosaico digital de superfície gerado do
ambiente controlado.
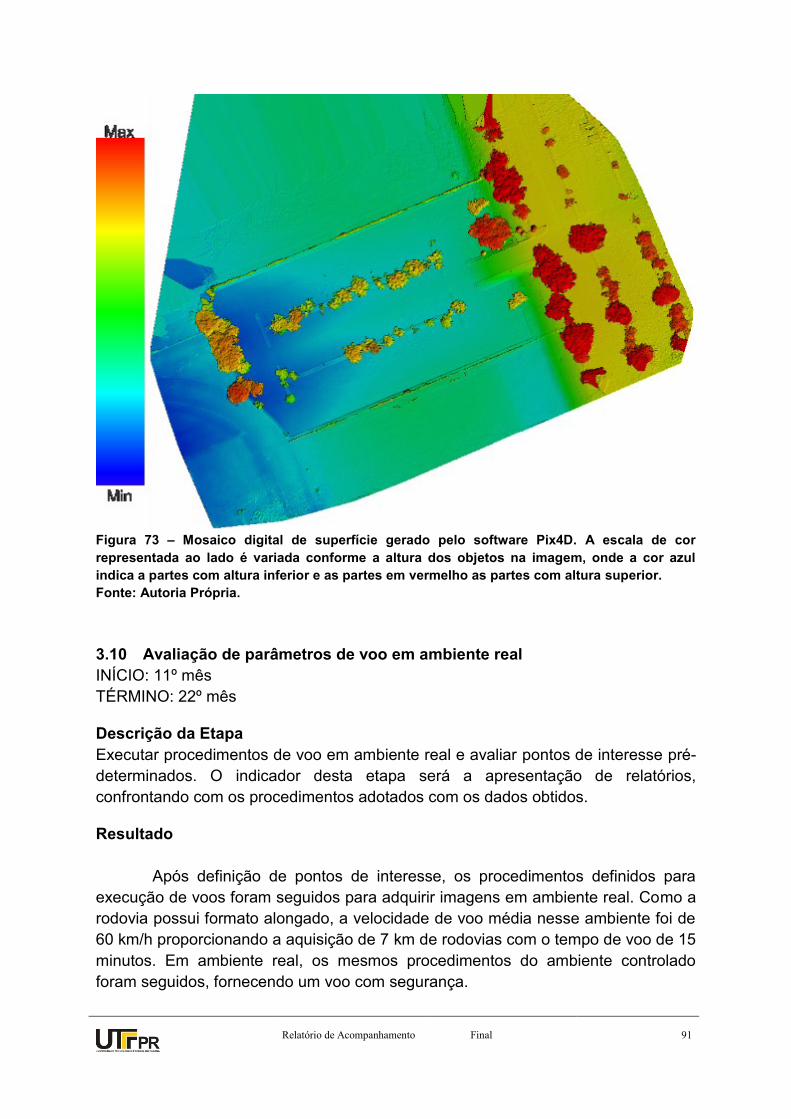
Relatório de Acompanhamento
Final
91
Figura 73 – Mosaico digital de superfície gerado pelo software Pix4D. A escala de cor
representada ao lado é variada conforme a altura dos objetos na imagem, onde a cor azul
indica a partes com altura inferior e as partes em vermelho as partes com altura superior.
Fonte: Autoria Própria.
3.10 Avaliação de parâmetros de voo em ambiente real
INÍCIO: 11º mês
TÉRMINO: 22º mês
Descrição da Etapa
Executar procedimentos de voo em ambiente real e avaliar pontos de interesse pré-
determinados. O indicador desta etapa será a apresentação de relatórios,
confrontando com os procedimentos adotados com os dados obtidos.
Resultado
Após definição de pontos de interesse, os procedimentos definidos para
execução de voos foram seguidos para adquirir imagens em ambiente real. Como a
rodovia possui formato alongado, a velocidade de voo média nesse ambiente foi de
60 km/h proporcionando a aquisição de 7 km de rodovias com o tempo de voo de 15
minutos. Em ambiente real, os mesmos procedimentos do ambiente controlado
foram seguidos, fornecendo um voo com segurança.
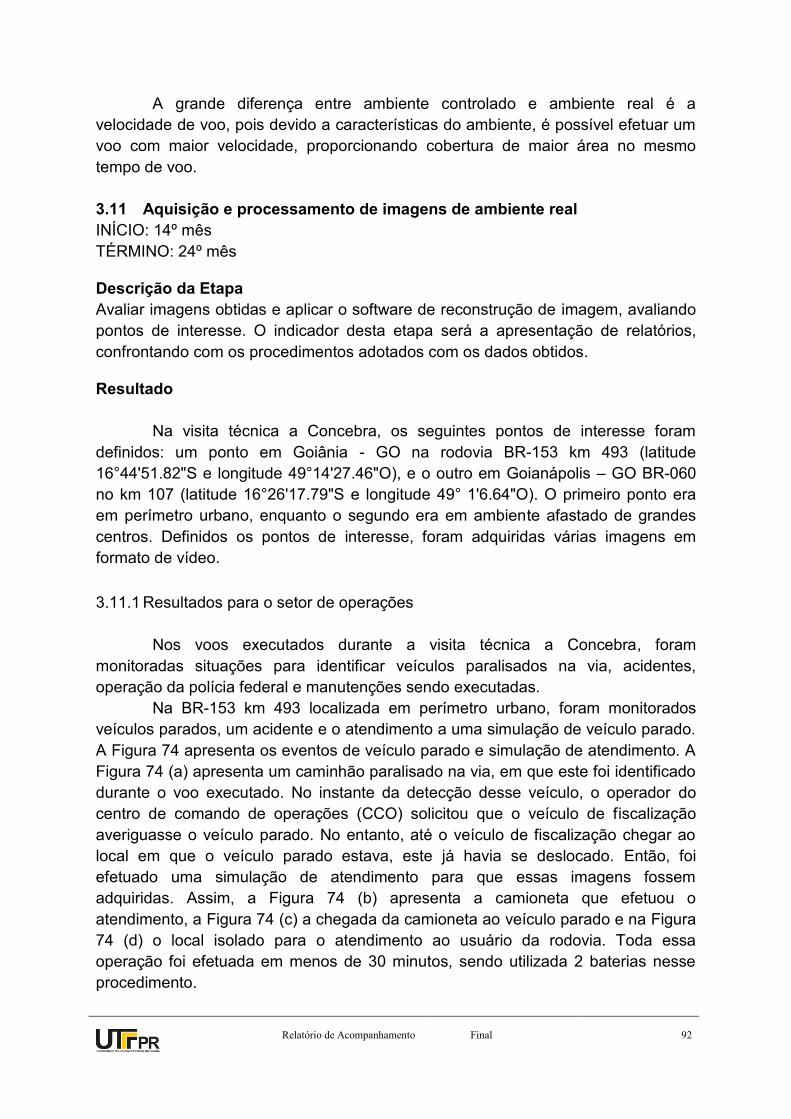
Relatório de Acompanhamento
Final
92
A grande diferença entre ambiente controlado e ambiente real é a
velocidade de voo, pois devido a características do ambiente, é possível efetuar um
voo com maior velocidade, proporcionando cobertura de maior área no mesmo
tempo de voo.
3.11 Aquisição e processamento de imagens de ambiente real
INÍCIO: 14º mês
TÉRMINO: 24º mês
Descrição da Etapa
Avaliar imagens obtidas e aplicar o software de reconstrução de imagem, avaliando
pontos de interesse. O indicador desta etapa será a apresentação de relatórios,
confrontando com os procedimentos adotados com os dados obtidos.
Resultado
Na visita técnica a Concebra, os seguintes pontos de interesse foram
definidos: um ponto em Goiânia - GO na rodovia BR-153 km 493 (latitude
16°44'51.82"S e longitude 49°14'27.46"O), e o outro em Goianápolis – GO BR-060
no km 107 (latitude 16°26'17.79"S e longitude 49° 1'6.64"O). O primeiro ponto era
em perímetro urbano, enquanto o segundo era em ambiente afastado de grandes
centros. Definidos os pontos de interesse, foram adquiridas várias imagens em
formato de vídeo.
3.11.1 Resultados para o setor de operações
Nos voos executados durante a visita técnica a Concebra, foram
monitoradas situações para identificar veículos paralisados na via, acidentes,
operação da polícia federal e manutenções sendo executadas.
Na BR-153 km 493 localizada em perímetro urbano, foram monitorados
veículos parados, um acidente e o atendimento a uma simulação de veículo parado.
A Figura 74 apresenta os eventos de veículo parado e simulação de atendimento. A
Figura 74 (a) apresenta um caminhão paralisado na via, em que este foi identificado
durante o voo executado. No instante da detecção desse veículo, o operador do
centro de comando de operações (CCO) solicitou que o veículo de fiscalização
averiguasse o veículo parado. No entanto, até o veículo de fiscalização chegar ao
local em que o veículo parado estava, este já havia se deslocado. Então, foi
efetuado uma simulação de atendimento para que essas imagens fossem
adquiridas. Assim, a Figura 74 (b) apresenta a camioneta que efetuou o
atendimento, a Figura 74 (c) a chegada da camioneta ao veículo parado e na Figura
74 (d) o local isolado para o atendimento ao usuário da rodovia. Toda essa
operação foi efetuada em menos de 30 minutos, sendo utilizada 2 baterias nesse
procedimento.
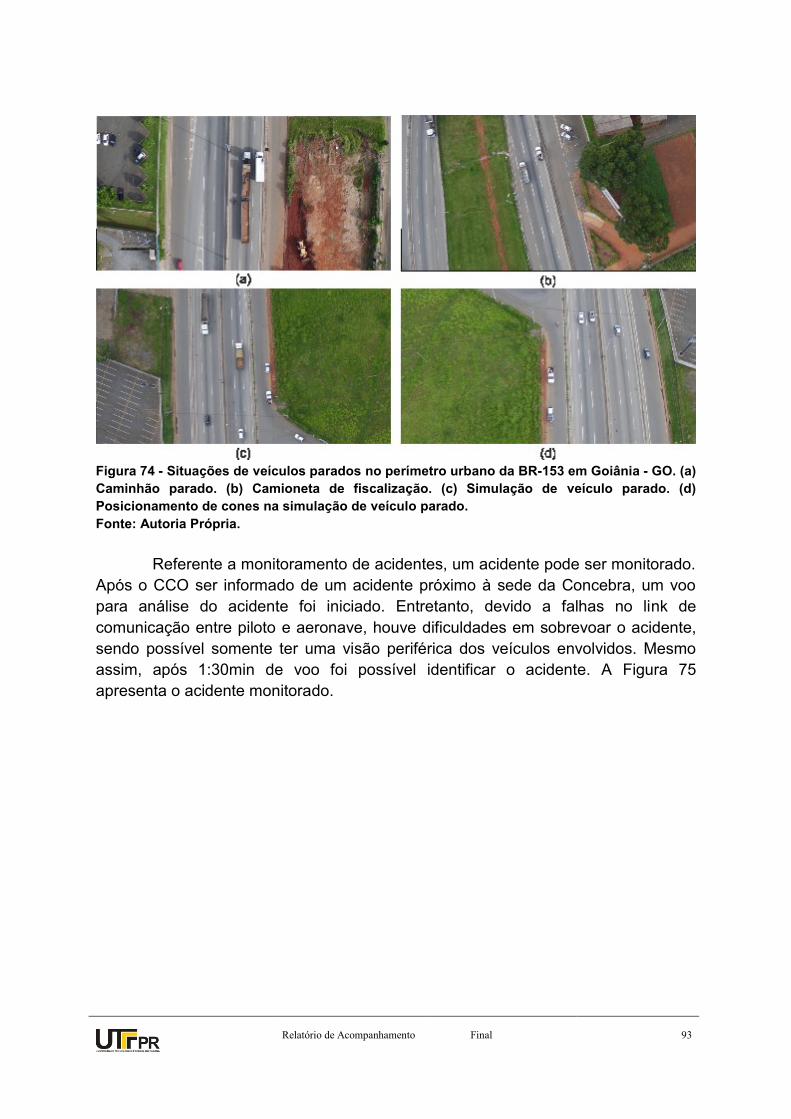
Relatório de Acompanhamento
Final
93
Figura 74 - Situações de veículos parados no perímetro urbano da BR-153 em Goiânia - GO. (a)
Caminhão parado. (b) Camioneta de fiscalização. (c) Simulação de veículo parado. (d)
Posicionamento de cones na simulação de veículo parado.
Fonte: Autoria Própria.
Referente a monitoramento de acidentes, um acidente pode ser monitorado.
Após o CCO ser informado de um acidente próximo à sede da Concebra, um voo
para análise do acidente foi iniciado. Entretanto, devido a falhas no link de
comunicação entre piloto e aeronave, houve dificuldades em sobrevoar o acidente,
sendo possível somente ter uma visão periférica dos veículos envolvidos. Mesmo
assim, após 1:30min de voo foi possível identificar o acidente. A Figura 75
apresenta o acidente monitorado.
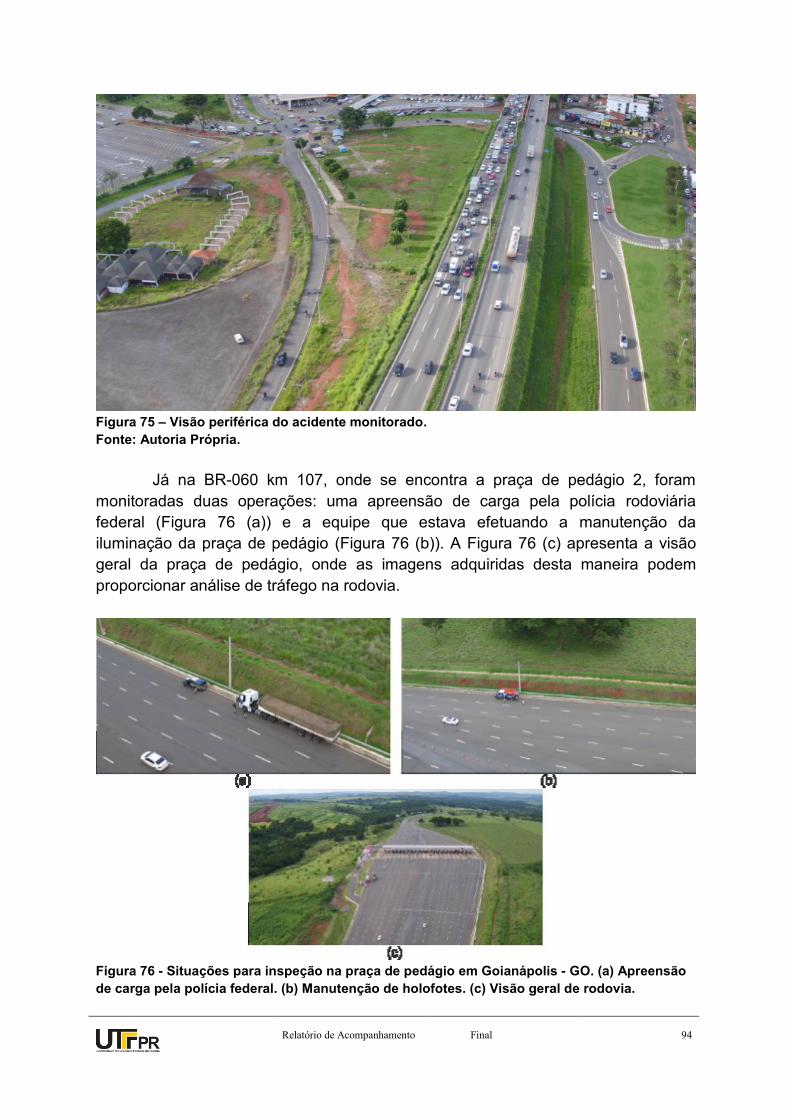
Relatório de Acompanhamento
Final
94
Figura 75 – Visão periférica do acidente monitorado.
Fonte: Autoria Própria.
Já na BR-060 km 107, onde se encontra a praça de pedágio 2, foram
monitoradas duas operações: uma apreensão de carga pela polícia rodoviária
federal (Figura 76 (a)) e a equipe que estava efetuando a manutenção da
iluminação da praça de pedágio (Figura 76 (b)). A Figura 76 (c) apresenta a visão
geral da praça de pedágio, onde as imagens adquiridas desta maneira podem
proporcionar análise de tráfego na rodovia.
Figura 76 - Situações para inspeção na praça de pedágio em Goianápolis - GO. (a) Apreensão
de carga pela polícia federal. (b) Manutenção de holofotes. (c) Visão geral de rodovia.
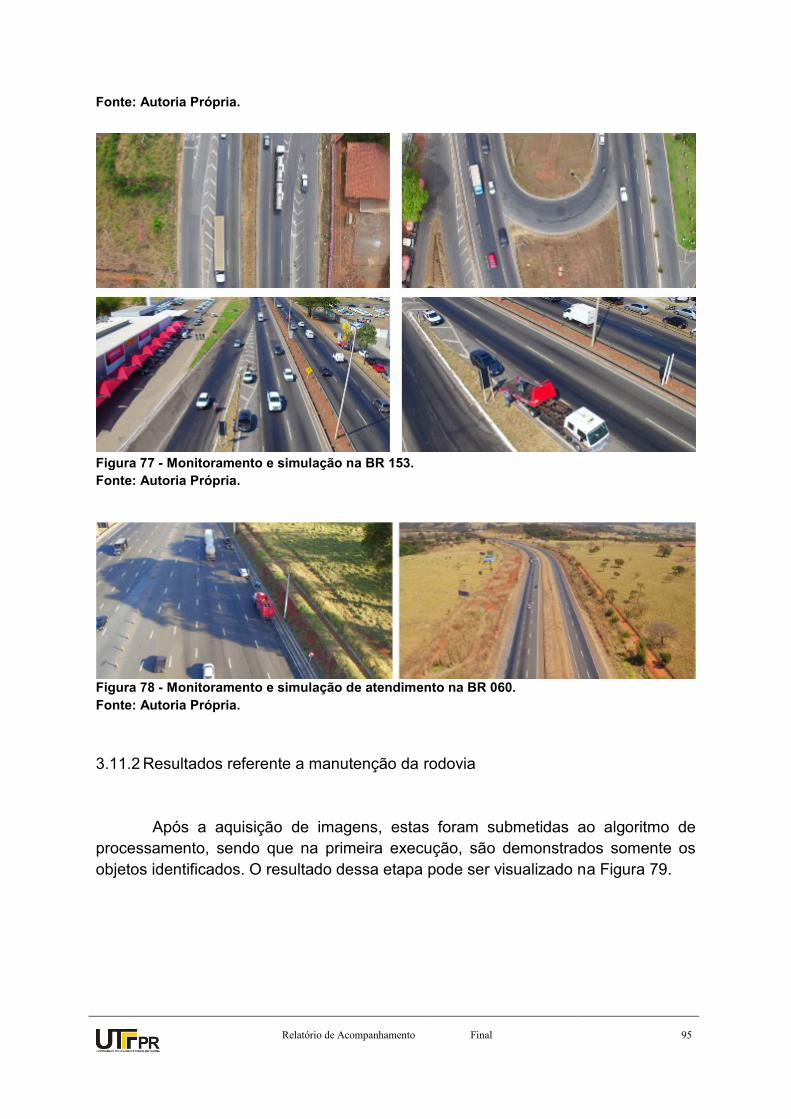
Relatório de Acompanhamento
Final
95
Fonte: Autoria Própria.
Figura 77 - Monitoramento e simulação na BR 153.
Fonte: Autoria Própria.
Figura 78 - Monitoramento e simulação de atendimento na BR 060.
Fonte: Autoria Própria.
3.11.2 Resultados referente a manutenção da rodovia
Após a aquisição de imagens, estas foram submetidas ao algoritmo de
processamento, sendo que na primeira execução, são demonstrados somente os
objetos identificados. O resultado dessa etapa pode ser visualizado na Figura 79.
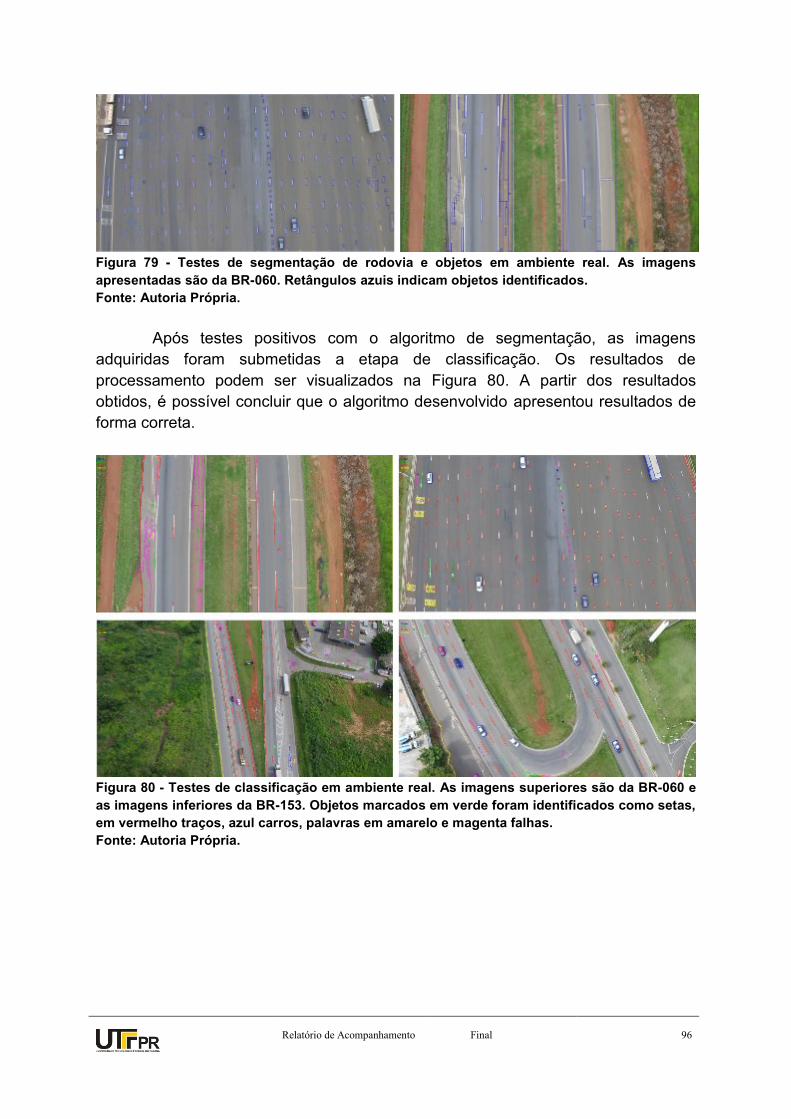
Relatório de Acompanhamento
Final
96
Figura 79 - Testes de segmentação de rodovia e objetos em ambiente real. As imagens
apresentadas são da BR-060. Retângulos azuis indicam objetos identificados.
Fonte: Autoria Própria.
Após testes positivos com o algoritmo de segmentação, as imagens
adquiridas foram submetidas a etapa de classificação. Os resultados de
processamento podem ser visualizados na Figura 80. A partir dos resultados
obtidos, é possível concluir que o algoritmo desenvolvido apresentou resultados de
forma correta.
Figura 80 - Testes de classificação em ambiente real. As imagens superiores são da BR-060 e
as imagens inferiores da BR-153. Objetos marcados em verde foram identificados como setas,
em vermelho traços, azul carros, palavras em amarelo e magenta falhas.
Fonte: Autoria Própria.
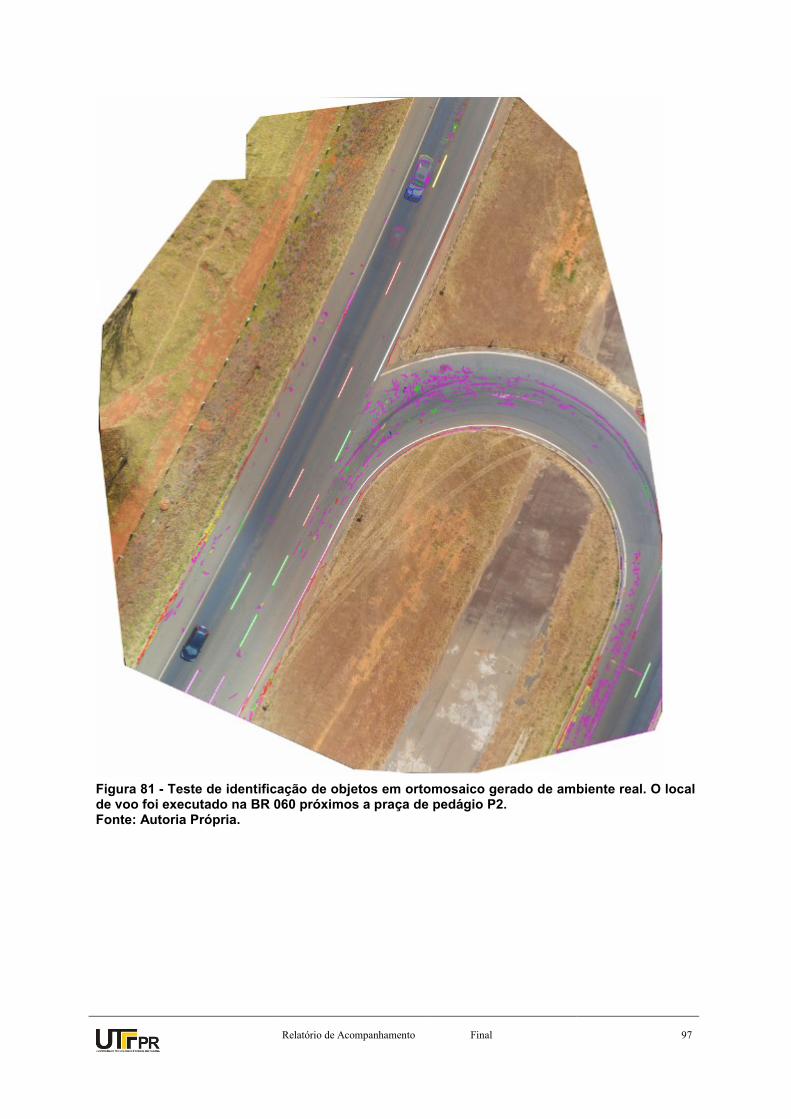
Relatório de Acompanhamento
Final
97
Figura 81 - Teste de identificação de objetos em ortomosaico gerado de ambiente real. O local de voo foi executado na BR 060 próximos a praça de pedágio P2. Fonte: Autoria Própria.
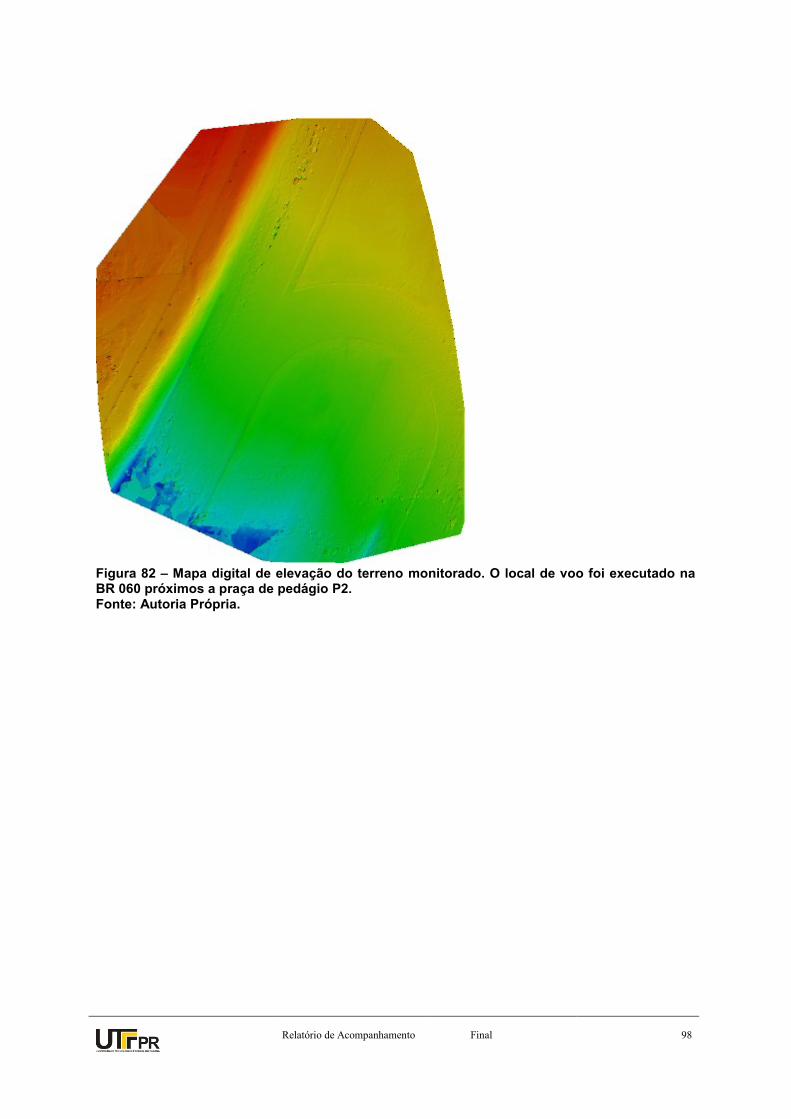
Relatório de Acompanhamento
Final
98
Figura 82 – Mapa digital de elevação do terreno monitorado. O local de voo foi executado na BR 060 próximos a praça de pedágio P2. Fonte: Autoria Própria.
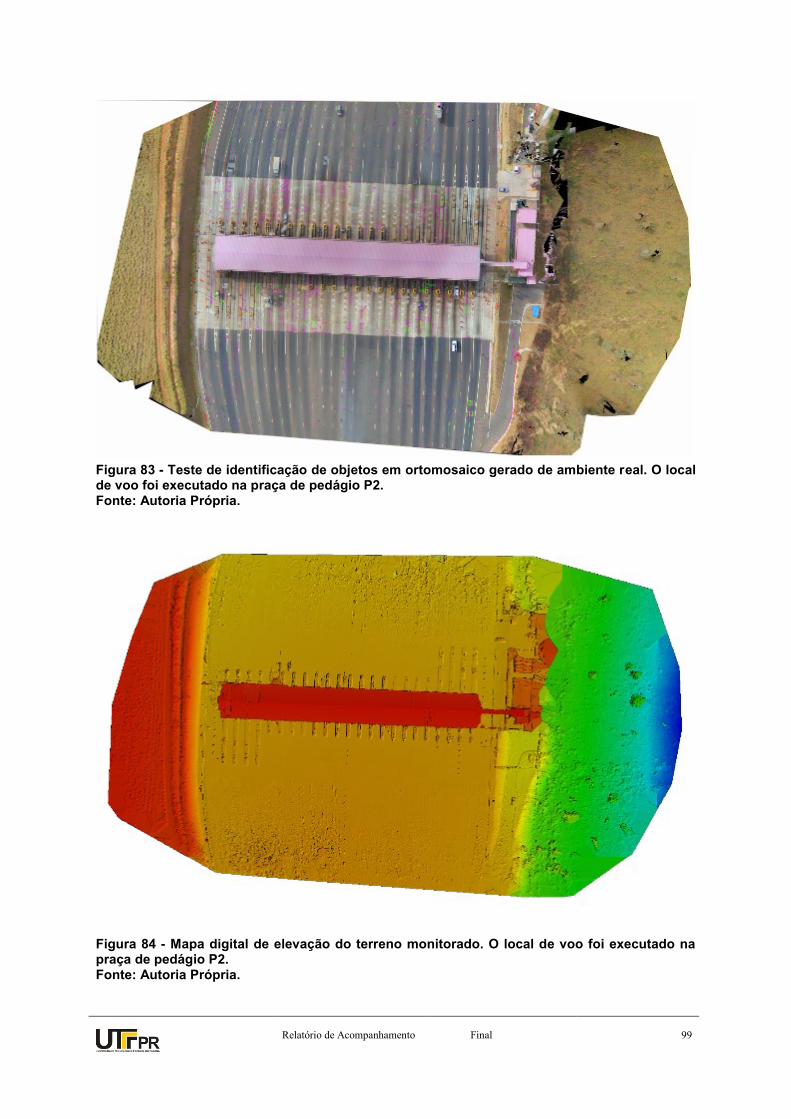
Relatório de Acompanhamento
Final
99
Figura 83 - Teste de identificação de objetos em ortomosaico gerado de ambiente real. O local de voo foi executado na praça de pedágio P2. Fonte: Autoria Própria.
Figura 84 - Mapa digital de elevação do terreno monitorado. O local de voo foi executado na praça de pedágio P2. Fonte: Autoria Própria.

Relatório de Acompanhamento
Final
100
Figura 85 - Modelo tridimensional da praça de pedágio P2 que foi monitorado através de voo automático. Fonte: Autoria Própria.
3.12 Avaliação dos resultados gerados em ambiente real
INÍCIO: 16º mês
TÉRMINO: 24º mês
Descrição da Etapa
Avaliar informações obtidas a partir dos ensaios em ambientes reais e confrontando
com análise in loco. O indicador desta etapa será a apresentação de relatórios,
confrontando com os procedimentos adotados com os dados obtidos.
Resultado
A partir do monitoramento efetuado durante a visita técnica, é possível
verificar que o VANT proporciona respostas rápidas para identificação de acidentes,
veículos parados e monitoramento de procedimento sendo executados na rodovia.
Durante as imagens adquiridas, foi possível verificar a interação do VANT com o
CCO, proporcionando atendimentos mais rápidos e precisos, em que, após a
identificação do problema, a equipe certa é deslocada. Desta forma, é possível
maior aproveitamento dos recursos disponíveis. Entretanto, como existe limitações
do VANT referente distância do piloto e da aeronave e tempo de voo, alguns
procedimentos podem ser executados para melhorar o uso da aeronave. Referente
ao caso de acidente informado, o veículo de fiscalização pode utilizar o VANT para
analisar o acidente na impossibilidade de chegar ao local devido ao
congestionamento. Isso pode ser efetuado para suprimir as limitações de tempo de
voo e distância entre piloto e aeronave. Além disso, como a aeronave permite o uso
de 2 controles, sendo um desses controles utilizado para movimentação da câmera
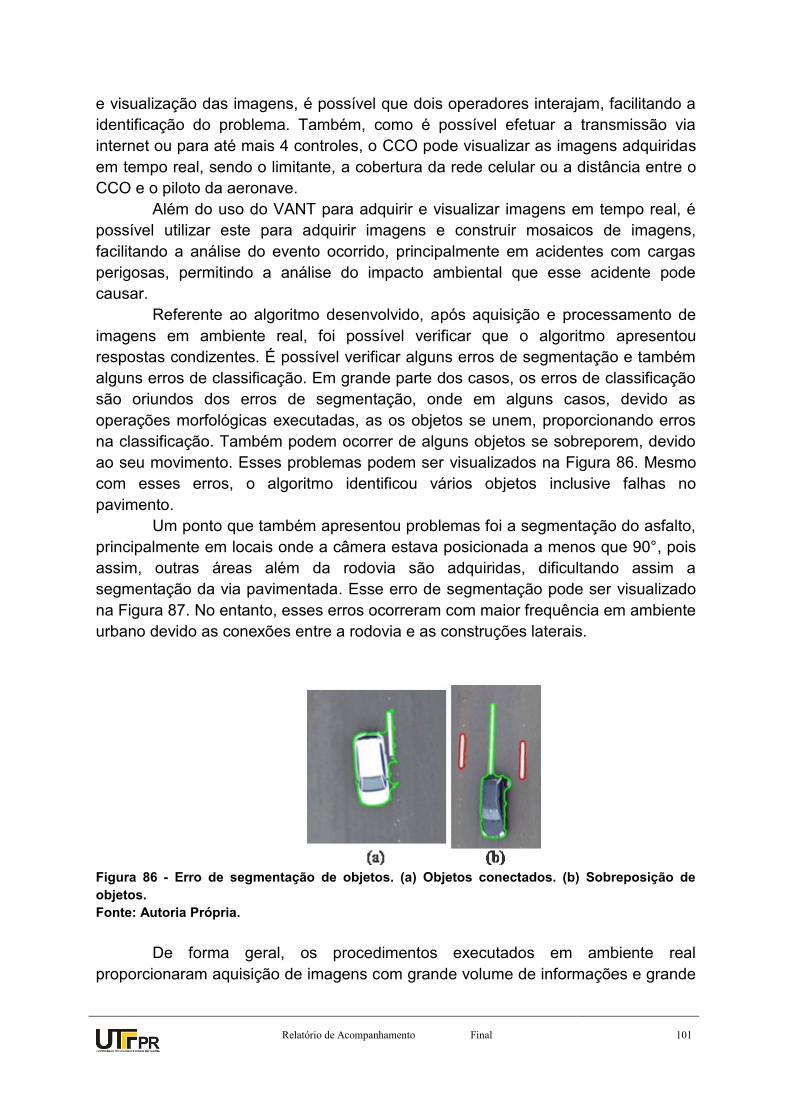
Relatório de Acompanhamento
Final
101
e visualização das imagens, é possível que dois operadores interajam, facilitando a
identificação do problema. Também, como é possível efetuar a transmissão via
internet ou para até mais 4 controles, o CCO pode visualizar as imagens adquiridas
em tempo real, sendo o limitante, a cobertura da rede celular ou a distância entre o
CCO e o piloto da aeronave.
Além do uso do VANT para adquirir e visualizar imagens em tempo real, é
possível utilizar este para adquirir imagens e construir mosaicos de imagens,
facilitando a análise do evento ocorrido, principalmente em acidentes com cargas
perigosas, permitindo a análise do impacto ambiental que esse acidente pode
causar.
Referente ao algoritmo desenvolvido, após aquisição e processamento de
imagens em ambiente real, foi possível verificar que o algoritmo apresentou
respostas condizentes. É possível verificar alguns erros de segmentação e também
alguns erros de classificação. Em grande parte dos casos, os erros de classificação
são oriundos dos erros de segmentação, onde em alguns casos, devido as
operações morfológicas executadas, as os objetos se unem, proporcionando erros
na classificação. Também podem ocorrer de alguns objetos se sobreporem, devido
ao seu movimento. Esses problemas podem ser visualizados na Figura 86. Mesmo
com esses erros, o algoritmo identificou vários objetos inclusive falhas no
pavimento.
Um ponto que também apresentou problemas foi a segmentação do asfalto,
principalmente em locais onde a câmera estava posicionada a menos que 90°, pois
assim, outras áreas além da rodovia são adquiridas, dificultando assim a
segmentação da via pavimentada. Esse erro de segmentação pode ser visualizado
na Figura 87. No entanto, esses erros ocorreram com maior frequência em ambiente
urbano devido as conexões entre a rodovia e as construções laterais.
Figura 86 - Erro de segmentação de objetos. (a) Objetos conectados. (b) Sobreposição de
objetos.
Fonte: Autoria Própria.
De forma geral, os procedimentos executados em ambiente real
proporcionaram aquisição de imagens com grande volume de informações e grande
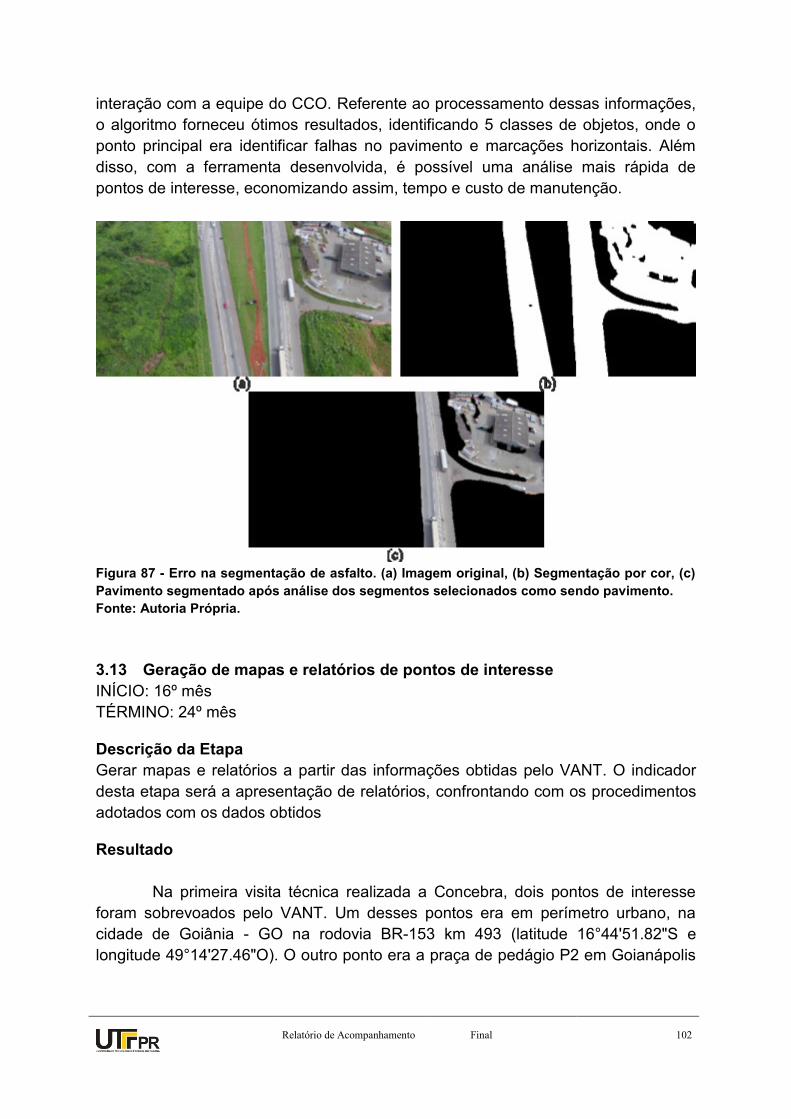
Relatório de Acompanhamento
Final
102
interação com a equipe do CCO. Referente ao processamento dessas informações,
o algoritmo forneceu ótimos resultados, identificando 5 classes de objetos, onde o
ponto principal era identificar falhas no pavimento e marcações horizontais. Além
disso, com a ferramenta desenvolvida, é possível uma análise mais rápida de
pontos de interesse, economizando assim, tempo e custo de manutenção.
Figura 87 - Erro na segmentação de asfalto. (a) Imagem original, (b) Segmentação por cor, (c)
Pavimento segmentado após análise dos segmentos selecionados como sendo pavimento.
Fonte: Autoria Própria.
3.13 Geração de mapas e relatórios de pontos de interesse
INÍCIO: 16º mês
TÉRMINO: 24º mês
Descrição da Etapa
Gerar mapas e relatórios a partir das informações obtidas pelo VANT. O indicador
desta etapa será a apresentação de relatórios, confrontando com os procedimentos
adotados com os dados obtidos
Resultado
Na primeira visita técnica realizada a Concebra, dois pontos de interesse
foram sobrevoados pelo VANT. Um desses pontos era em perímetro urbano, na
cidade de Goiânia - GO na rodovia BR-153 km 493 (latitude 16°44'51.82"S e
longitude 49°14'27.46"O). O outro ponto era a praça de pedágio P2 em Goianápolis
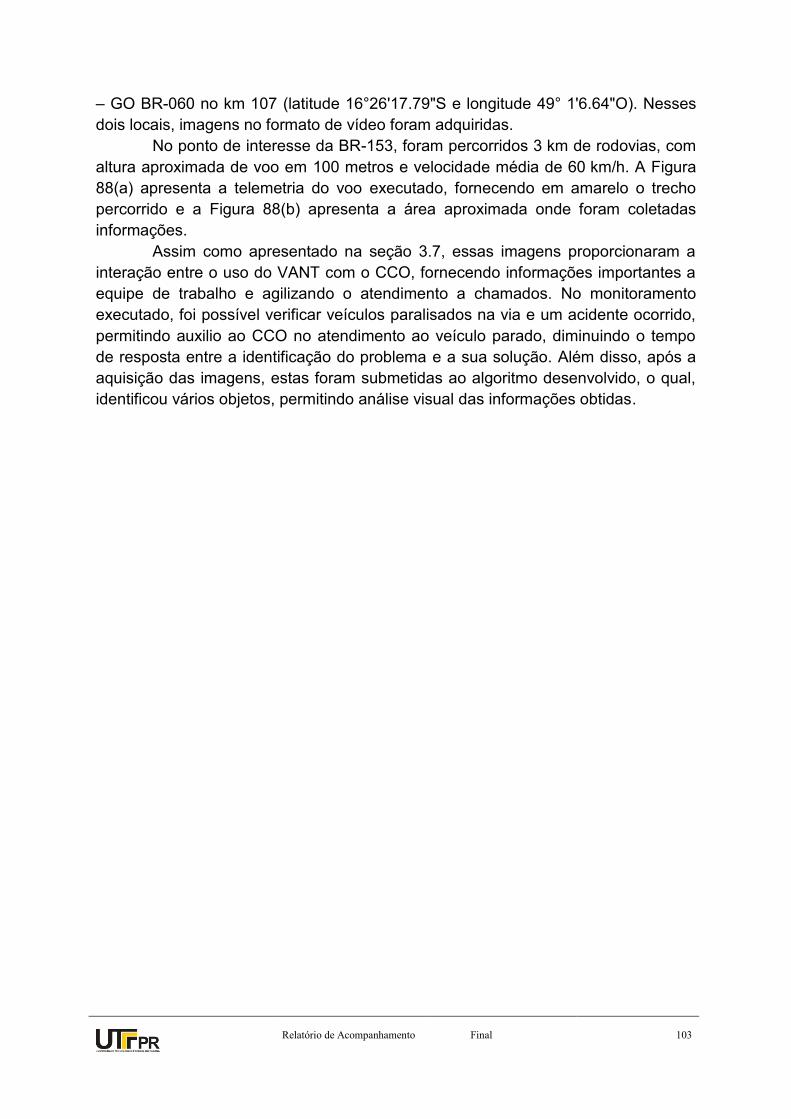
Relatório de Acompanhamento
Final
103
– GO BR-060 no km 107 (latitude 16°26'17.79"S e longitude 49° 1'6.64"O). Nesses
dois locais, imagens no formato de vídeo foram adquiridas.
No ponto de interesse da BR-153, foram percorridos 3 km de rodovias, com
altura aproximada de voo em 100 metros e velocidade média de 60 km/h. A Figura
88(a) apresenta a telemetria do voo executado, fornecendo em amarelo o trecho
percorrido e a Figura 88(b) apresenta a área aproximada onde foram coletadas
informações.
Assim como apresentado na seção 3.7, essas imagens proporcionaram a
interação entre o uso do VANT com o CCO, fornecendo informações importantes a
equipe de trabalho e agilizando o atendimento a chamados. No monitoramento
executado, foi possível verificar veículos paralisados na via e um acidente ocorrido,
permitindo auxilio ao CCO no atendimento ao veículo parado, diminuindo o tempo
de resposta entre a identificação do problema e a sua solução. Além disso, após a
aquisição das imagens, estas foram submetidas ao algoritmo desenvolvido, o qual,
identificou vários objetos, permitindo análise visual das informações obtidas.
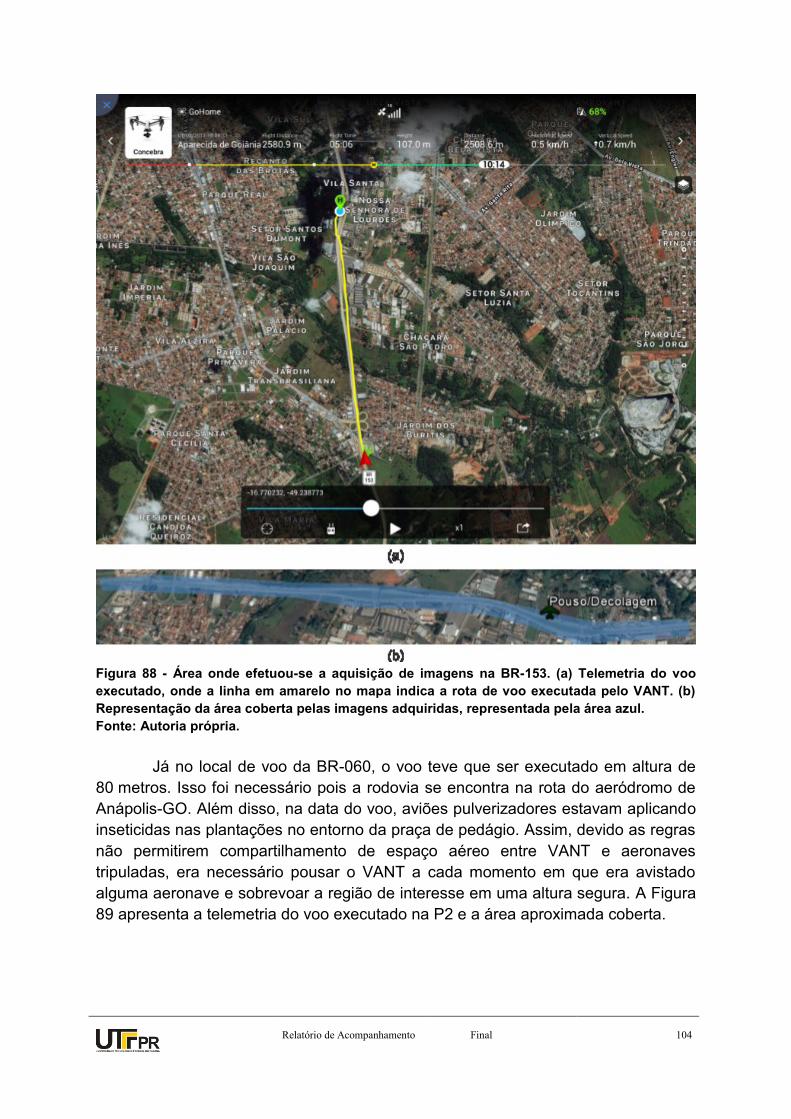
Relatório de Acompanhamento
Final
104
Figura 88 - Área onde efetuou-se a aquisição de imagens na BR-153. (a) Telemetria do voo
executado, onde a linha em amarelo no mapa indica a rota de voo executada pelo VANT. (b)
Representação da área coberta pelas imagens adquiridas, representada pela área azul.
Fonte: Autoria própria.
Já no local de voo da BR-060, o voo teve que ser executado em altura de
80 metros. Isso foi necessário pois a rodovia se encontra na rota do aeródromo de
Anápolis-GO. Além disso, na data do voo, aviões pulverizadores estavam aplicando
inseticidas nas plantações no entorno da praça de pedágio. Assim, devido as regras
não permitirem compartilhamento de espaço aéreo entre VANT e aeronaves
tripuladas, era necessário pousar o VANT a cada momento em que era avistado
alguma aeronave e sobrevoar a região de interesse em uma altura segura. A Figura
89 apresenta a telemetria do voo executado na P2 e a área aproximada coberta.
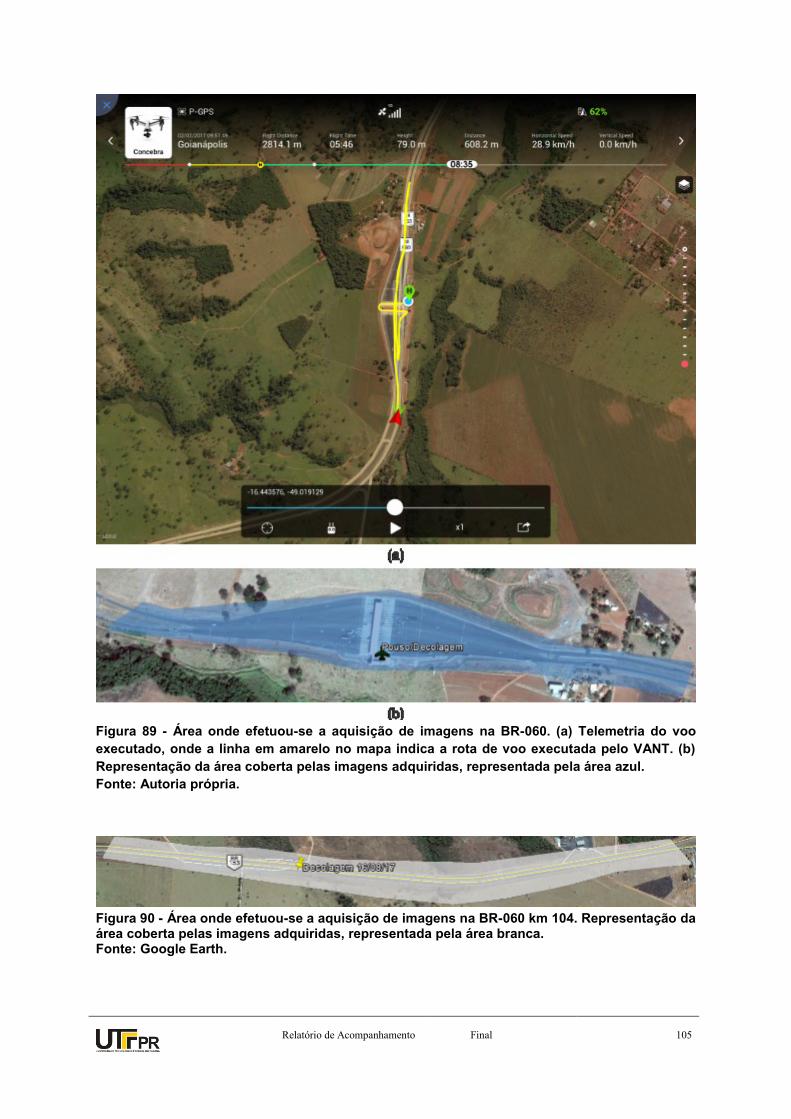
Relatório de Acompanhamento
Final
105
Figura 89 - Área onde efetuou-se a aquisição de imagens na BR-060. (a) Telemetria do voo
executado, onde a linha em amarelo no mapa indica a rota de voo executada pelo VANT. (b)
Representação da área coberta pelas imagens adquiridas, representada pela área azul.
Fonte: Autoria própria.
Figura 90 - Área onde efetuou-se a aquisição de imagens na BR-060 km 104. Representação da área coberta pelas imagens adquiridas, representada pela área branca. Fonte: Google Earth.
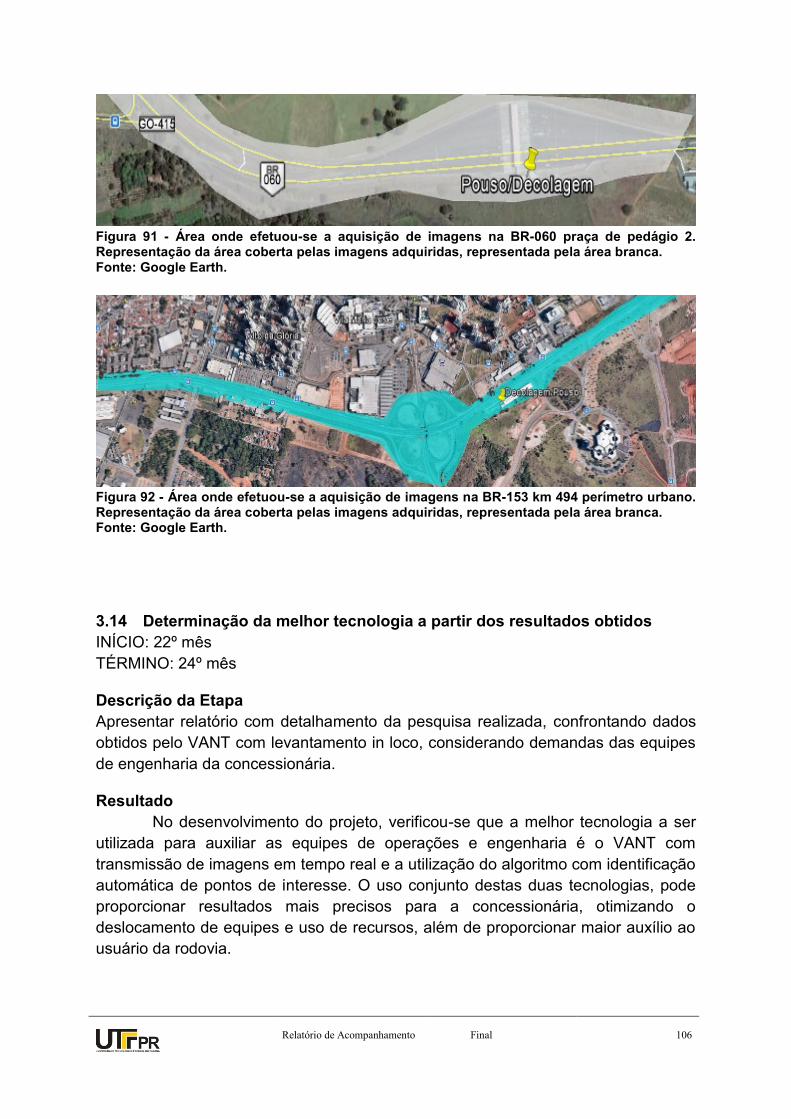
Relatório de Acompanhamento
Final
106
Figura 91 - Área onde efetuou-se a aquisição de imagens na BR-060 praça de pedágio 2. Representação da área coberta pelas imagens adquiridas, representada pela área branca. Fonte: Google Earth.
Figura 92 - Área onde efetuou-se a aquisição de imagens na BR-153 km 494 perímetro urbano. Representação da área coberta pelas imagens adquiridas, representada pela área branca. Fonte: Google Earth.
3.14 Determinação da melhor tecnologia a partir dos resultados obtidos
INÍCIO: 22º mês
TÉRMINO: 24º mês
Descrição da Etapa
Apresentar relatório com detalhamento da pesquisa realizada, confrontando dados
obtidos pelo VANT com levantamento in loco, considerando demandas das equipes
de engenharia da concessionária.
Resultado
No desenvolvimento do projeto, verificou-se que a melhor tecnologia a ser
utilizada para auxiliar as equipes de operações e engenharia é o VANT com
transmissão de imagens em tempo real e a utilização do algoritmo com identificação
automática de pontos de interesse. O uso conjunto destas duas tecnologias, pode
proporcionar resultados mais precisos para a concessionária, otimizando o
deslocamento de equipes e uso de recursos, além de proporcionar maior auxílio ao
usuário da rodovia.
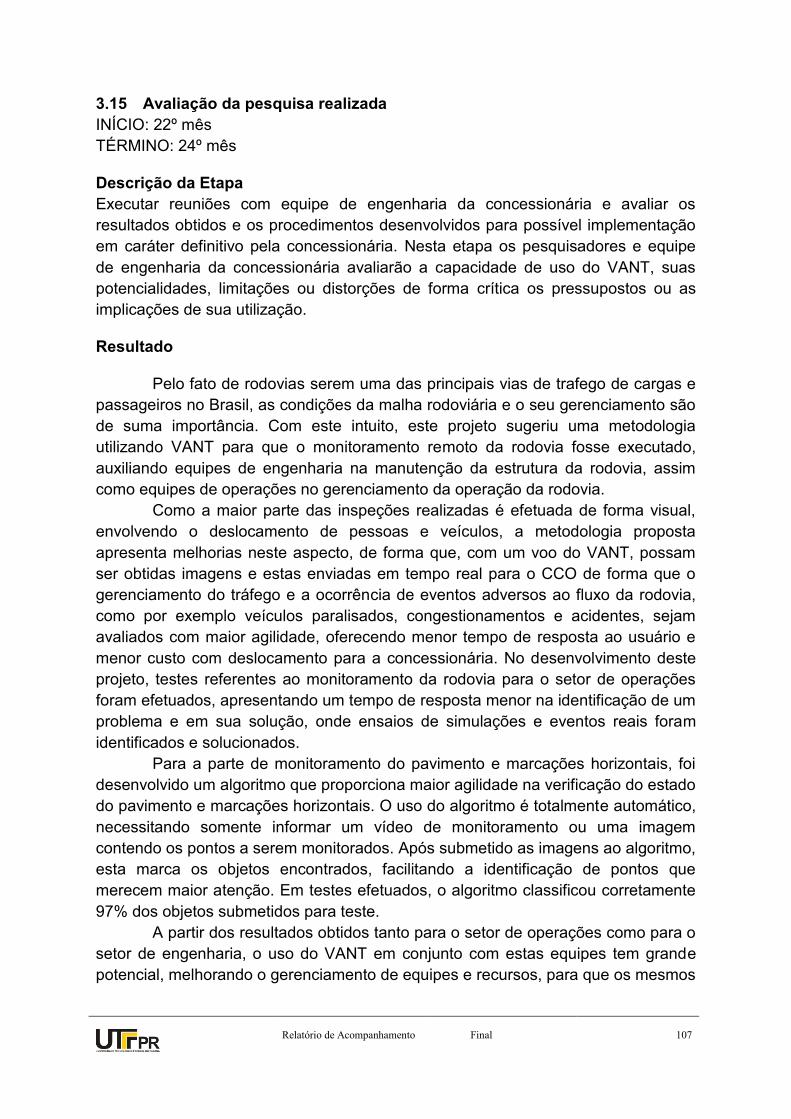
Relatório de Acompanhamento
Final
107
3.15 Avaliação da pesquisa realizada
INÍCIO: 22º mês
TÉRMINO: 24º mês
Descrição da Etapa
Executar reuniões com equipe de engenharia da concessionária e avaliar os
resultados obtidos e os procedimentos desenvolvidos para possível implementação
em caráter definitivo pela concessionária. Nesta etapa os pesquisadores e equipe
de engenharia da concessionária avaliarão a capacidade de uso do VANT, suas
potencialidades, limitações ou distorções de forma crítica os pressupostos ou as
implicações de sua utilização.
Resultado
Pelo fato de rodovias serem uma das principais vias de trafego de cargas e
passageiros no Brasil, as condições da malha rodoviária e o seu gerenciamento são
de suma importância. Com este intuito, este projeto sugeriu uma metodologia
utilizando VANT para que o monitoramento remoto da rodovia fosse executado,
auxiliando equipes de engenharia na manutenção da estrutura da rodovia, assim
como equipes de operações no gerenciamento da operação da rodovia.
Como a maior parte das inspeções realizadas é efetuada de forma visual,
envolvendo o deslocamento de pessoas e veículos, a metodologia proposta
apresenta melhorias neste aspecto, de forma que, com um voo do VANT, possam
ser obtidas imagens e estas enviadas em tempo real para o CCO de forma que o
gerenciamento do tráfego e a ocorrência de eventos adversos ao fluxo da rodovia,
como por exemplo veículos paralisados, congestionamentos e acidentes, sejam
avaliados com maior agilidade, oferecendo menor tempo de resposta ao usuário e
menor custo com deslocamento para a concessionária. No desenvolvimento deste
projeto, testes referentes ao monitoramento da rodovia para o setor de operações
foram efetuados, apresentando um tempo de resposta menor na identificação de um
problema e em sua solução, onde ensaios de simulações e eventos reais foram
identificados e solucionados.
Para a parte de monitoramento do pavimento e marcações horizontais, foi
desenvolvido um algoritmo que proporciona maior agilidade na verificação do estado
do pavimento e marcações horizontais. O uso do algoritmo é totalmente automático,
necessitando somente informar um vídeo de monitoramento ou uma imagem
contendo os pontos a serem monitorados. Após submetido as imagens ao algoritmo,
esta marca os objetos encontrados, facilitando a identificação de pontos que
merecem maior atenção. Em testes efetuados, o algoritmo classificou corretamente
97% dos objetos submetidos para teste.
A partir dos resultados obtidos tanto para o setor de operações como para o
setor de engenharia, o uso do VANT em conjunto com estas equipes tem grande
potencial, melhorando o gerenciamento de equipes e recursos, para que os mesmos
Relatório de Acompanhamento
Final
108
sejam destinados da forma correta, agilizando a resolução de problemas específicos
de cada área. Além disso, com o algoritmo desenvolvido, o seu uso em conjunto
com o VANT proporciona automatização nos procedimentos de verificação de
alguns pontos de interesse por parte dos setores responsáveis na manutenção de
pavimento e sinalização horizontal, permitindo que pontos específicos sejam
priorizados. Por fim, os resultados obtidos neste projeto de pesquisa desenvolvido,
demonstram que várias áreas da concessionária podem ser beneficiadas com a
metodologia de monitoramento de rodovias proposta, oferendo resultados mais
precisos e otimizando o uso de recursos disponíveis na resolução de problemas.
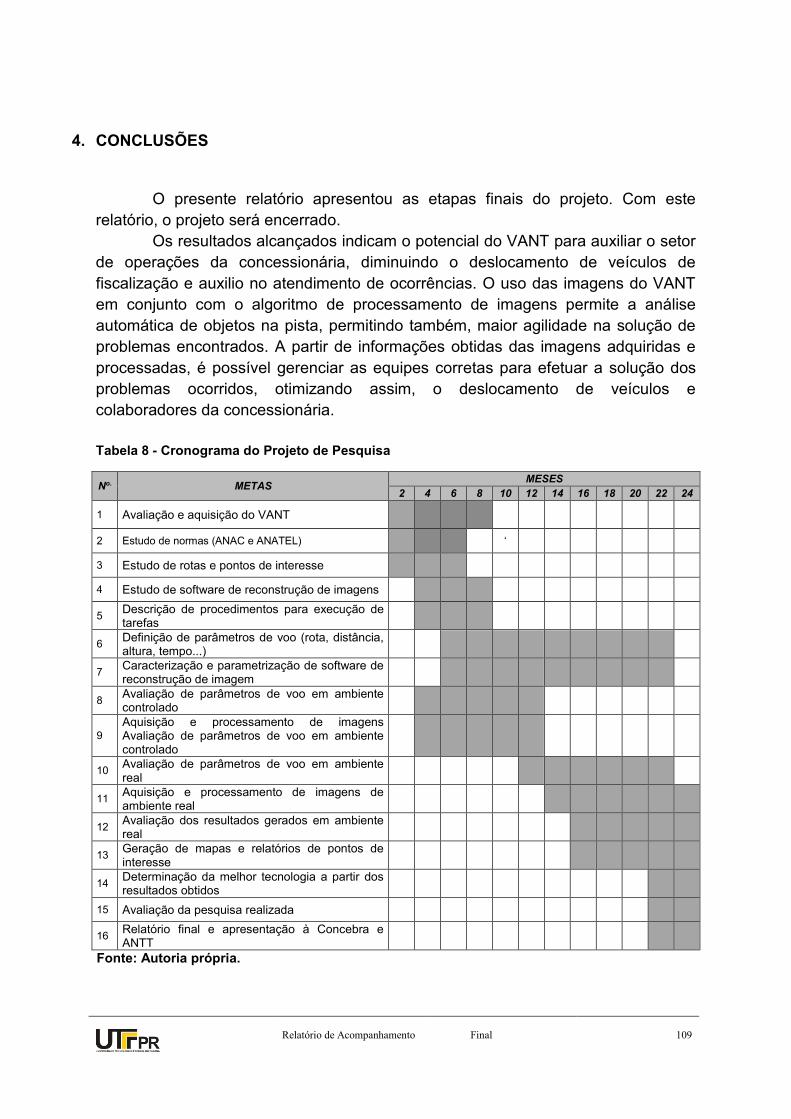
Relatório de Acompanhamento
Final
109
4. CONCLUSÕES
O presente relatório apresentou as etapas finais do projeto. Com este
relatório, o projeto será encerrado.
Os resultados alcançados indicam o potencial do VANT para auxiliar o setor
de operações da concessionária, diminuindo o deslocamento de veículos de
fiscalização e auxilio no atendimento de ocorrências. O uso das imagens do VANT
em conjunto com o algoritmo de processamento de imagens permite a análise
automática de objetos na pista, permitindo também, maior agilidade na solução de
problemas encontrados. A partir de informações obtidas das imagens adquiridas e
processadas, é possível gerenciar as equipes corretas para efetuar a solução dos
problemas ocorridos, otimizando assim, o deslocamento de veículos e
colaboradores da concessionária.
Tabela 8 - Cronograma do Projeto de Pesquisa
No. METAS MESES
2 4 6 8 10 12 14 16 18 20 22 24
1 Avaliação e aquisição do VANT
2 Estudo de normas (ANAC e ANATEL) ‘
3 Estudo de rotas e pontos de interesse
4 Estudo de software de reconstrução de imagens
5 Descrição de procedimentos para execução de tarefas
6 Definição de parâmetros de voo (rota, distância, altura, tempo...)
7 Caracterização e parametrização de software de reconstrução de imagem
8 Avaliação de parâmetros de voo em ambiente controlado
9
Aquisição e processamento de imagens Avaliação de parâmetros de voo em ambiente controlado
10 Avaliação de parâmetros de voo em ambiente real
11 Aquisição e processamento de imagens de ambiente real
12 Avaliação dos resultados gerados em ambiente real
13 Geração de mapas e relatórios de pontos de interesse
14 Determinação da melhor tecnologia a partir dos resultados obtidos
15 Avaliação da pesquisa realizada
16 Relatório final e apresentação à Concebra e ANTT
Fonte: Autoria própria.
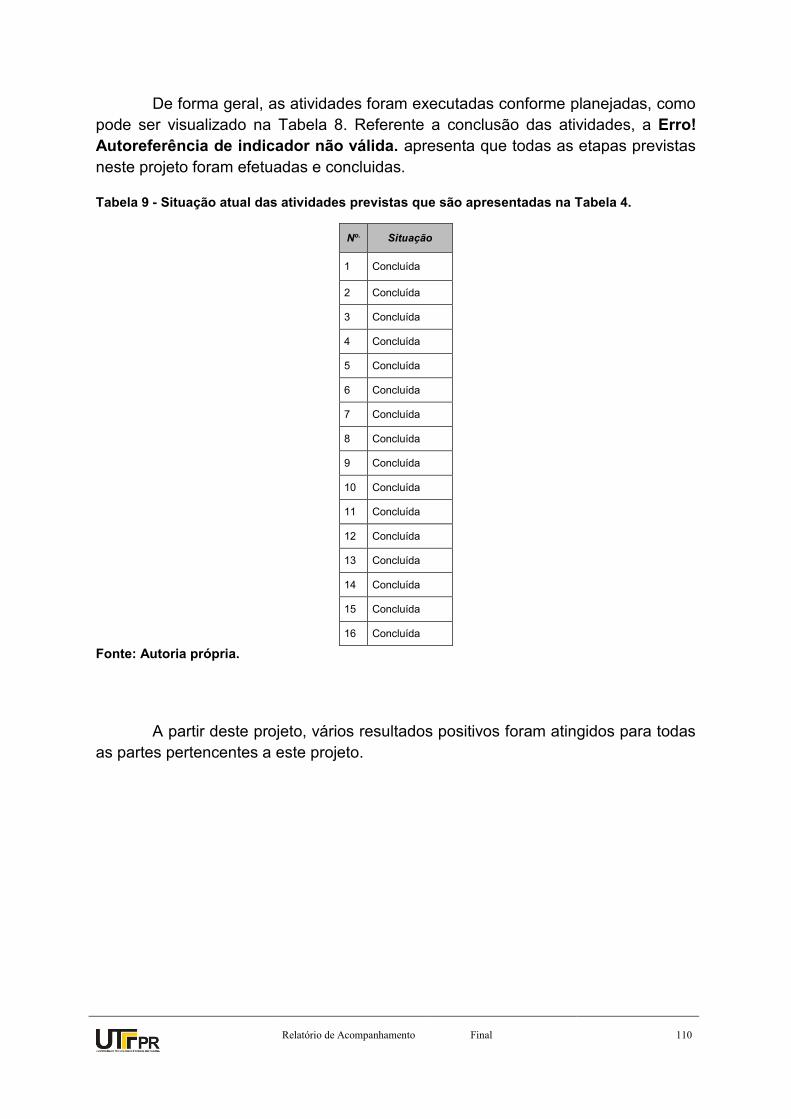
Relatório de Acompanhamento
Final
110
De forma geral, as atividades foram executadas conforme planejadas, como
pode ser visualizado na Tabela 8. Referente a conclusão das atividades, a Erro!
Autoreferência de indicador não válida. apresenta que todas as etapas previstas
neste projeto foram efetuadas e concluidas.
Tabela 9 - Situação atual das atividades previstas que são apresentadas na Tabela 4.
No. Situação
1 Concluída
2 Concluída
3 Concluída
4 Concluída
5 Concluída
6 Concluída
7 Concluída
8 Concluída
9 Concluída
10 Concluída
11 Concluída
12 Concluída
13 Concluída
14 Concluída
15 Concluída
16 Concluída
Fonte: Autoria própria.
A partir deste projeto, vários resultados positivos foram atingidos para todas
as partes pertencentes a este projeto.
Relatório de Acompanhamento
Final
111
REFERÊNCIAS AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL. PROPOSIÇÃO DE UM REGULAMENTO ESPECIAL PARA SISTEMAS DE AERONAV ES REMOTAMENTE PILOTADAS - RPAS E EMENDA AO RBAC 67. Disponível em: <http://www.anac.gov.br/participacao-social/audiencias-e-consultas-publicas/audiencias/2015/aud13/justificativa.pdf>. Acesso em: 10 set. 2015.
AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL. Requisitos Gerais para Aeronaves Não tripuladas de uso CivilBrasil, 2017a. Disponível em: <http://www.anac.gov.br/assuntos/legislacao/legislacao-1/rbha-e-rbac/rbac/rbac-e-94-emd-00/@@display-file/arquivo_norma/RBACE94EMD00.pdf>
AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL. Cadastro de Drones. Disponível em: <http://www.anac.gov.br/assuntos/paginas-tematicas/drones/cadastro-de-drones>. Acesso em: 8 maio. 2017b.
AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL. Regras Sobre Drones, 2017c. Disponível em: <http://www.anac.gov.br/noticias/2017/regras-da-anac-para-uso-de-drones-entram-em-vigor/release_drone.pdf>
AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL. Drones - RPA Classe 3 operados além da linha visada visual (BVLOS) ou acima de 400 pés acima do nível do solo. Disponível em: <http://www.anac.gov.br/assuntos/paginas-tematicas/drones/drones-de-classe-3-peso-maximo-de-decolagem-ate-25-kg-operados-alem-da-linha-visada-visual-bvlos-ou-acima-de-400-pes-acima-do-nivel-do-solo>. Acesso em: 5 maio. 2017d.
BAUMGARTNER, A. et al. Automaticon Road Extraction Based on Multi Scale, Grouping, and Context. Photogrammetric Engimeering and Remote Sensing, v. 65, n. 7, p. 777–785, 1999.
BEYERER, J.; PUENTE LEÓN, F.; FRESE, C. Color. In: Machine Vision. Berlin, Heidelberg: Springer Berlin Heidelberg, 2016a. p. 163–202.
BEYERER, J.; PUENTE LEÓN, F.; FRESE, C. Morphological Image Processing. In: Machine Vision. Berlin, Heidelberg: Springer Berlin Heidelberg, 2016b. p. 607–647.
CAPONETTI, L.; CASTELLANO, G. Fuzzy Logic for Image Processing. Cham: Springer International Publishing, 2017a.
CAPONETTI, L.; CASTELLANO, G. Java for Image Processing. In: Fuzzy Logic for Image Processing. Chan: Springer International Publishing, 2017b. p. 65–81.
COLOMINA, I.; MOLINA, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS Journal of Photogrammetry and Remote Sensing, v. 92, p. 79–97, 2014.
DALAL, N.; TRIGGS, B. Histograms of Oriented Gradients for Human Detection. IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05). Anais...San Diego, CA, USA: IEEE, 2005Disponível em: <http://ieeexplore.ieee.org/document/1467360/>
DEPARTAMENTO DE CONTROLE DO ESPAÇO AÉREO. SARPAS. Disponível em: <http://servicos.decea.gov.br/sarpas/>. Acesso em: 5 mar. 2017a.
DEPARTAMENTO DE CONTROLE DO ESPAÇO AÉREO. ICA 100-40 Sistemas de Aeronaves Remotamente Pilotadas e o Acesso ao Espaço Aéreo Brasileiro. Disponível em: <http://publicacoes.decea.gov.br/?i=publicacao&id=4510>. Acesso em: 5 maio. 2017b.
DEPARTAMENTO NACIONAL DE INFRAESTRUTURA E TRASPORTE; EXECUTIVA, D.;
Relatório de Acompanhamento
Final
112
RODOVIÁRIAS, I. DE P. Manual de sinalização rodoviária. 3. ed. Rio de Janeiro, Brasil: [s.n.].
DJI. DJI Drones. Disponível em: <http://www.dji.com/products/drones>. Acesso em: 4 ago. 2017a.
DJI. Buy Inspire 1 RAW. Disponível em: <http://store.dji.com/product/inspire-1-raw>. Acesso em: 4 ago. 2017b.
DJI. Inspire 1 - Spec, Facs, manual, video tutorials and DJI GO. Disponível em: <http://www.dji.com/inspire-1/info#specs>. Acesso em: 5 jun. 2017c.
DJI. DJI Developer. Disponível em: <https://developer.dji.com/mobile-sdk/>. Acesso em: 4 ago. 2017d.
DJI. Inspire 1 - Remote Controller. Disponível em: <http://www.dji.com/inspire-1/remote-controller>. Acesso em: 4 ago. 2017e.
DUDA, R. O.; HART, P. E.; STORK, D. G. Pattern Classification. 2. ed. New York: Wiley-Interscience, 2001.
GONZALEZ, R. C.; WOODS, R. E. Processamento Digital de Imagens. 3. ed. São Paulo, SP: Pearson, 2010.
JIN, H.; FENG, Y. Automated road pavement marking detection from high resolution aerial images based on multi-resolution image analysis and anisotropic Gaussian filtering. ICSPS 2010 - Proceedings of the 2010 2nd International Conference on Signal Processing Systems, v. 1, p. 337–341, 2010.
PIX4D. Pix4Dmapper Pro. Disponível em: <https://pix4d.com/product/pix4dmapper-pro/>. Acesso em: 23 jun. 2017.
PORTAL BRASIL. Anatel exige registro para operação de drones. Disponível em: <http://www.brasil.gov.br/defesa-e-seguranca/2017/01/anatel-exige-registro-para-operacao-de-drones>. Acesso em: 17 jan. 2017.
RUSS, J.; NEAL, F. Acquiring Images. In: The Image Processing Handbook. 7. ed. Boca Raton, FL: CRC Press, 2016. p. 1–46.
TELECOMUNICAÇÕES, A. N. DE. Drones devem ser homologados para evitar interferências. Disponível em: <http://www.anatel.gov.br/institucional/ultimas-noticiass/2-uncategorised/1485-drones-devem-ser-homologados-para-evitar-interferencias>. Acesso em: 10 jan. 2017.
WANG, W. et al. A review of road extraction from remote sensing images. Journal of Traffic and Transportation Engineering (English Edition), v. 3, n. 3, p. 271–282, 2016.