dÉbora pereira salgado - engenharia biomédica -ufu · dÉbora pereira salgado realidade virtual e...
TRANSCRIPT

Universidade Federal de Uberlândia Faculdade de Engenharia Elétrica
Graduação em Engenharia Biomédica
DÉBORA PEREIRA SALGADO
REALIDADE VIRTUAL E TECNOLOGIA ASSISTIVA: AMBIENTE SEGURO PARA TREINAMENTO DE CADEIRANTES CONTROLADO
POR SINAIS ELETROMIOGRÁFICOS
Uberlândia 2016
DÉBORA PEREIRA SALGADO
REALIDADE VIRTUAL E TECNOLOGIA ASSISTIVA: AMBIENTE SEGURO PARA TREINAMENTO DE CADEIRANTES CONTROLADO
POR SINAIS ELETROMIOGRÁFICOS
Trabalho apresentado como requisito parcial de avaliação na disciplina Trabalho de Conclusão de Curso de Engenharia Biomédica da Universidade Federal de Uberlândia.
Orientador: Eduardo Lázaro Martins Naves
______________________________________________
Assinatura do Orientador
Uberlândia 2016

Dedico este trabalho à minha família, pelo
estímulo, carinho e compreensão.

AGRADECIMENTOS
Aos meus pais Eurico e Marilza pelo carinho, apoio e por estarem sempre
presentes e me incentivando a ir atrás dos meus objetivos.
Aos meus irmãos Augusto e Eduardo por todo o carinho e me encorajar a ser uma
pessoa melhor.
Ao Rainer pelo carinho, compreensão e por ser sempre a pessoa a me encorajar a
seguir adiante, não importando o tamanho das dificuldades.
Ao Prof. Eduardo Lázaro Martins Naves pelo incentivo, motivação e orientação
durante a graduação e pela oportunidade de realizar este trabalho.
Aos meus amigos, em especial à Felipe Roque Martins e Ludymila Ribeiro Borges,
pela paciência com as minhas perguntas, questionamentos e principalmente pelos
ensinamentos feitos ao longo deste trabalho.
Ao Prof. Edgard Afonso Lamounier Junior e Adriano Oliveira Andrade pela
oportunidade de mostrar o meu trabalho e pelos ensinamentos passados na minha
vida acadêmica.
Aos colegas da Faculdade de Engenharia Elétrica, em especial aos colegas do
Programa de Educação Tutorial, por todos os aprendizados durante o tempo que
participei do grupo.
A todos os funcionários da Faculdade de Engenharia Elétrica e os demais institutos
da Universidade Federal de Uberlândia com quem tive a oportunidade de conviver,
pela dedicação no serviço e pelos conhecimentos trocados.
RESUMO
Este trabalho baseia-se no projeto de controle de uma cadeira de rodas virtual por
meio de sinais de eletromiografia de superfície (sEMG) desenvolvido por Silva
(2013). O trabalho apresentado é uma versão modular em uma plataforma mais
flexível e atualizada. Além disso, este módulo faz parte de um sistema integrado
com design centrado no usuário para controle multimodal de uma cadeira de rodas.
O objetivo é de que o módulo seja uma ferramenta de treinamento para usuários
que venham a utilizar o acionamento por sEMG numa cadeira de rodas motorizada
(CRM) real de forma autônoma e segura. A metodologia proposta baseia-se na
utilização Realidade Virtual (RV) para desenvolver uma Tecnologia Assistiva (TA)
e, para tanto, foi utilizado um ambiente virtual desenvolvido na plataforma Unity
para desenvolver a interface e o controle do sistema. A aquisição do sinal entrada
foi feita através de um sensor EMG acoplado a um microcontrolador, com o
processamento e filtragem do sinal feito de forma embarcada. Os resultados do
projeto mostraram que o módulo é uma alternativa para treinamento seguro para
usuários de cadeiras de rodas motorizadas com grave deficiência motora,
entretanto, existe uma necessidade de novos testes com novas técnicas de
processamento para melhorar o seu desempenho.
Palavras-chave: tecnologia assistiva, realidade virtual, design centrado no usuário,
sinais de eletromiografia, sistema embarcado.

ABSTRACT
This work is based on a project about of virtual electric wheelchair controlled by
electromyography signals developed by Silva, 2013. The presented work is a
modular version of a more flexible and updated platform. In addition, this module
belong there is an embedded system centered design for multimodal user control a
wheelchair. The goal is that the module is a training tool for users who will use the
drive by sEMG a real motorized chair autonomously and safely. The proposed
methodology is based on the use of Virtual Reality (VR) to develop an Assistive
Technology (AT), therefore, a virtual environment developed on the Unity platform
to develop the interface and control of the system was used, the acquisition of the
input signal was done through an EMG sensor coupled to the Arduino, a single
board hardware electronics prototyping platform designed with a microcontroller,
processing and filtering the signal was developed embedded form in order that the
Arduino only send a command like trigger (trigger) for the interface presented to the
user in the simulator. The results of the project showed that the module is an
alternative to secure training for users of motorized wheelchairs with severe
physical disabilities, however, there is a need for new tests with new processing
techniques to improve their performance.
Keywords: assistive technology, virtual reality, user-centered design,
electromyography signals, embedded system

LISTA DE ILUSTRAÇÕES
Figura 1 – Esquema geral de uma cadeira motorizada. ................................................. 17
Figura 2- Diagrama de blocos do sistema de controle pelo movimento da cabeça ... 19
Figura 3 - Diagrama de blocos do sistema de controle por voz. .................................... 20 Figura 4 - Representação do sistema de conexão entre a cadeira e o smartphone. . 21 Figura 5 - Headset TDS e a configuração experimental ................................................. 22
Figura 6 - Headset Emotiv EPOC – sensor EEG ............................................................. 24 Figura 7- Diagrama de Blocos do sistema de controle de uma CRM por EMG. ......... 25
Figura 8 - Protótipo do sistema de Interface de controle sem às mãos. (a) mostra o protótipo do dispositivo vestível e a Figura 8 (b) quadro geral do sistema. ................. 29
Figura 9 - Diagrama de Blocos Simplificado do Sistema de Controle da Cadeira Virtual por sEMG. ................................................................................................................... 31
Figura 10 - Diagrama de Blocos Detalhado do Sistema de Controle da Cadeira Virtual por sEMG. ................................................................................................................... 31 Figura 11 - Ilustração de um eletrodo de superfície de placa metálica. ....................... 32 Figura 12 - Eletrodos posicionados na configuração bipolar. ......................................... 33
Figura 13 - Equipamento MyoSystemBr1 .......................................................................... 33 Figura 14 - Sensor Myoware Fonte: (Datasheet Myoware,2016). ................................. 34
Figura 15 - Layout do Sensor Myoware. Fonte: (Datasheet Myoware ,2016). ............ 34 Figura 16 - Ilustração do Arduino. Fonte: (Datasheet Arduino,2016). .......................... 35
Figura 17 - Simulador Virtual ViEW na vista em primeira pessoa. Fonte:(SILVA et al., 2013). ....................................................................................................................................... 36 Figura 18 - Simulador Virtual ViEW na visão lateral. Fonte: :(SILVA et al., 2013). .... 37
Figura 19 - Simulador Virtual uViEW na visão em primeira pessoa. ............................. 37
Figura 20 - Simulador Virtual uViEW na vista lateral. ...................................................... 38 Figura 21 - lustração dos músculos selecionados para aquisição do sinal EMG. ...... 39
Figura 22 - Ilustração do posicionamento do sensor no músculo. ................................ 39 Figura 23 - Ilustração da ligação do Sensor no Arduino. ................................................ 40
Figura 24 - Fluxograma da rotina do processamento da Trigger. ................................. 41 Figura 25 - Histograma de uma Distribuição Normal. ...................................................... 42 Figura 26 - Diagrama de Blocos da comunicação do dispositivo de entrada. ............. 43
Figura 27 - Diagrama de Blocos da comunicação do dispositivo da interface. ........... 44
Figura 28 - Interface de controle proposta para uma cadeira de rodas real, primeira janela. ...................................................................................................................................... 45
Figura 29 - Interface de controle proposta para uma cadeira de rodas real, segunda janela ....................................................................................................................................... 45
Figura 30 - Interface de controle desenvolvida para a cadeira de rodas virtual, primeira tela. ........................................................................................................................... 46
Figura 31 - Interface de controle desenvolvida para a cadeira de rodas virtual, segunda tela. .......................................................................................................................... 46 Figura 32 - Mensagem ao usuário avisando que o sensor está desconectado .......... 47 Figura 33 - Teste do projeto. ................................................................................................ 48

LISTA DE ABREVIATURAS E SIGLAS
ABNT – Associação Brasileira de Normas Técnicas
AV – Ambiente Virtual
BCI – Brain-Computer Interface
CAA – Comunicação Aumentativa Alternativa
CRM – Cadeira de Rodas Motorizada
FEELT – Faculdade de Engenharia Elétrica
EMG – Sinal de Eletromiografia
EEG – Sinal de Eletroencefalografia
EOG – Sinal de Eletroculografia
IHM – Interface Homen-Máquina
IROG – Oculografia por Infravermelho
NTA – Núcleo de Tecnologias Assistivas
OMS – Organização Mundial da Saúde
RV – Realidade Virtual
SSVEP –Steady State Visually Evoked Potentials
sEMG – Sinal de Eletromiografia de Superfície
TA – Tecnologia Assistiva
TDS – Tongue Driven System
UFU – Universidade Federal de Uberlândia

9
SUMÁRIO
1 INTRODUÇÃO ....................................................................................................................................10
1.1 CONTEXTUALIZAÇÃO ..........................................................................................................................10
1.2 OBJETIVO DO ESTUDO .......................................................................................................................13
1.3 JUSTIFICATIVA ...................................................................................................................................14
1.4 ESTRUTURA DO TRABALHO ................................................................................................................14
2 DESENVOLVIMENTO ........................................................................................................................16
2.1 REVISÃO BIBLIOGRÁFICA ....................................................................................................................16
2.1.1 CADEIRAS DE RODAS ......................................................................................................................16
2.1.2 CADEIRAS DE RODAS COM CONTROLE ALTERNATIVO ........................................................................18
2.1.3 SINAL ELETROMIOGRÁFICO ..............................................................................................................25
2.1.4 REALIDADE VIRTUAL APLICADO NA ÁREA DE TECNOLOGIAS ASSISTIVAS ...........................................26
2.1.5 CADEIRA DE RODAS VIRTUAIS ..........................................................................................................28
2.2 MATERIAIS E MÉTODOS ......................................................................................................................30
2.2.1 ELABORAÇÃO DO SISTEMA DE CONTROLE DA CADEIRA VIRTUAL POR SEMG ......................................30
2.2.2 DEFINIÇÃO DOS MATERIAIS E FERRAMENTAS PARA PROGRAMAÇÃO ..................................................32
2.2.3 AQUISIÇÃO DO SINAL SEMG ............................................................................................................38
2.2.4 PROCESSAMENTO DO SINAL EMG ....................................................................................................40
2.2.5 COMUNICAÇÃO ENTRE O ARDUINO E O AMBIENTE VIRTUAL ................................................................43
2.2.6 DEFINIÇÃO DA INTERFACE DE CONTROLE DA CADEIRA VIRTUAL ..........................................................44
3 RESULTADOS E DISCUSSÃO ..........................................................................................................45
3.1 RESULTADOS .....................................................................................................................................45
3.2 DISCUSSÃO ........................................................................................................................................48
4 CONCLUSÕES ...................................................................................................................................49
5 REFERÊNCIAS ...................................................................................................................................50

10
1 INTRODUÇÃO
1.1 Contextualização
A Organização Mundial da Saúde (OMS) divulgou um estudo em 2011 que revela
que mais de 1 bilhão de pessoas apresenta alguma deficiência. Isto representa
aproximadamente 15% da população mundial (WHO, 2011), ou seja, uma em cada
sete pessoas possui algum tipo de deficiência, sendo que, desse número, 70
milhões precisam de cadeiras de rodas. No Brasil, segundo dados do censo do
IBGE, existe um número superior a 45 milhões de pessoas com algum tipo de
deficiência, seja ela visual, auditiva, motora ou intelectual. Em torno de 9 milhões
de pessoas possuem algum tipo de dificuldade motora, sendo que destas
aproximadamente 3,7 milhões sofrem com dificuldades motoras severas (CENSO,
2010).
É esperado para os próximos anos que a incidência de deficientes aumente em
função do envelhecimento das populações e o risco de deficiência na população de
pessoas com idade avançada, resultando assim no aumento global de doenças
crônicas como câncer, distúrbios mentais, doenças cardiovasculares e entre outras.
O relatório da OMS evidência que as pessoas com deficiência apresentam as
piores perspectivas de saúde, níveis mais baixos de escolaridade, participação
econômica menor e taxas de pobreza mais elevada se comparado com pessoas
hígidas. Essa realidade se deve ao fato das barreiras enfrentadas por eles, que
incluem discriminação, ausência de serviços de reabilitação, mobilidade e
infraestrutura sem acessibilidade.
Para atingir perspectivas melhores e mais duradouras, novas tecnologias são
desenvolvidas pela motivação de tornar a vida do usuário cada vez mais fácil.
Sendo assim, diante desta realidade, é crescente a demanda por dispositivos de
tecnologia assistiva (TA). Dessa forma, ao auxiliar esses indivíduos, os dispositivos
de TA promovem acessibilidade, autonomia, reinserção na sociedade, autoestima e
melhoria de qualidade de vida dos mesmos.
TA é uma área que integra áreas interdisciplinares para desenvolver dispositivos,
recursos, serviços, práticas, entre outros facilitadores que proporcione uma
ampliação de uma habilidade funcional deficitária que possibilite a realização de
uma função que se encontra impedida por circunstância de deficiência. Além disso,
é importante entender que TA serve à pessoa com deficiência que necessita

11
desempenhar funções do cotidiano de forma independente, sendo então um
recurso não para o profissional e sim para o usuário (BERSCH, 2013).
De forma geral, Bersch definiu algumas categorias da TA. A categoria de auxilio
para vida diária e vida prática é uma delas, sendo exemplos os talheres
modificados, suportes para utensílios domésticos, equipamentos que promovem a
independência das pessoas com deficiência visual na realização de tarefas como
consultar o relógio, entre outros. Outra categoria é a comunicação aumentativa e
alternativa (CAA), destinada a atender pessoas que não consegue se comunicar
por meio da fala ou escrita funcional. Com essa tecnologia de comunicação o
usuário pode se expressar, demonstrar sentimentos, questionamentos e vontades.
Exemplos de CAA são as pranchas de comunicação construídas com simbologia
específica, pranchas com produção de voz, pranchas dinâmicas em dispositivos do
tipo tablets e outros.
Um dos recursos de TA com grande demanda são os das órteses e próteses. As
órteses são dispositivos permanentes ou transitórios, utilizadas para auxiliar as
funções de um membro, órgão ou tecido, evitando deformidades ou sua progressão
e/ou compensando insuficiências funcionais, sendo confeccionadas de forma
específica para cada usuário. As próteses, diferentes das órteses, são dispositivos
permanentes ou transitórios que substituem de forma total ou parcialmente partes
ausentes do corpo. As próteses podem ser internas (como prótese articular do
quadril, coração artificial, válvula cardíaca, entre outros), externas (prótese de
membro inferior e superior), implantadas (implante dentário) e estéticas (próteses
que mantém apenas a forma estética, como a prótese mamária).
A mobilidade é um dos pilares para reinserção desses indivíduos na sociedade. O
que existe hoje para auxílio em mobilidade são bengalas, muletas, andadores,
carrinhos, cadeiras de rodas manuais ou elétricas, scooters e cadeiras de rodas
inteligentes (smart wheelchairs). Infelizmente, existe um alto índice de pessoas
que não consegue utilizar ferramentas manuais, ou que em algum determinando
momento terão que abandonar tais ferramentas em função do agravamento da
deficiência, por exemplo em casos em que o indivíduo perdeu quase a totalidade
de seus movimentos voluntários, como tetraplegia e esclerose lateral amiotrófica.
Como solução, os sinais bioelétricos são, frequentemente, um dos últimos recursos
possíveis para controlar um dispositivo de TA, onde o usuário pode expressar sua

12
intenção pelo sinal eletromiográfico ou EMG (PINHEIRO et al., 2011). O EMG,
derivado da atividade muscular, foi utilizado inicialmente com finalidade
estritamente clínica, considerado como uma ferramenta de diagnóstico durante a
segunda guerra mundial. Na engenharia de reabilitação, a eletromiografia é
utilizada por várias décadas para controlar próteses de membros, chamadas
também de próteses mioelétricas (BARROS, 2005).
Os pacientes que ainda são capazes de realizar movimentos residuais com um dos
membros, ou para mover sua cabeça, podem usar um dispositivo de pressão. O
mesmo princípio pode ser aplicado aos sinais de EMG em que a ação de pressão
pode ser substituída por contração muscular. Utilizando métodos computacionais, é
possível gerar sinais binários, com '1' a ser associado a atividade muscular e '0' à
ausência de atividade. O sinal binário pode ser usado para operar um dispositivo
de varredura, por exemplo, um teclado virtual, onde o usuário manda uma
contração ’1’ quando o sistema varrer a tecla desejada(PINHEIRO et al., 2011).
Sendo assim, na área de comunicação de dispositivos TA o EMG pode ser utilizado
para constituir uma interface de comando de uma cadeira de rodas motorizada
(SILVA et al., 2013).
A cadeira de rodas motorizada (CRM) é um dispositivo de TA indispensável para
auxílio à mobilidade de pessoas com deficiências motoras severas. Entretanto, os
usuários apresentam dificuldades em conduzi-las de forma adequada e os testes
com cadeiras de rodas reais podem envolver riscos à segurança (FEHR et al.,
2000). A partir dessa problemática, nota-se a necessidade do uso de treinamento
para utilização da TA de forma segura. A solução encontrada foi utilizar a
tecnologia da realidade virtual (RV) para desenvolvimento de uma ferramenta para
treinamento do uso da TA.
RV pode ser definida como uma tecnologia que oferece interface avançada para
aplicações computacionais, onde o usuário interage e “navega” em tempo real em
um ambiente tridimensional (KIRNER, 2007). A RV dispõe de uma variedade de
benefícios, pois “permite a criação de uma interface homem-máquina de forma
natural e poderosa, possibilitando ao usuário interação, navegação e imersão num
ambiente tridimensional sintético, gerado pelo computador através de canais
multissensoriais de visão, audição, tato, olfato ou paladar (Cardoso, 2011). Na
área saúde, a RV é bastante aplicada para reproduzir situações reais sem risco a
13
pacientes, pela possibilidade de simular e visualizar ações impossíveis de serem
percebidas no mundo real (NUNES et al., 2011), como ferramenta para
treinamento, reabilitação e educação (SANCHEZ et al., 2011).
Para projetos, existem três características importantes para aplicações da RV: a
imersão, interação e presença. A imersão pode ser feita por meio de dispositivos
especiais como o Oculus Rift®, dependendo da especificidade do projeto é um
aspecto necessário, mas dispensável se comparado com os outros aspectos.
Entretanto, a imersão potencializa a interação da interface e o usuário. A interação
refere-se à comunicação entre o usuário e o ambiente virtual (AV) e a presença
remete, neste contexto, à sensação do usuário sentir-se envolvido na aplicação.
No começo dos anos 90, alguns estudos se desenvolveram abordando a
concepção de simuladores de condução de CRMs (INMA,1994), permitindo a
realização de experimentos e a avaliação em diversas situações da condução de
CRMs de forma totalmente segura (Erren-Wolters, 2007). São diversas as
aplicações dos simuladores, podendo ser utilizadas para o aprendizado da
condução (ADELOLA et al., 2009) desenvolvimento de funcionalidades automáticas
de condução, entre outros.
1.2 Objetivo do Estudo
Considerando a otimização da tecnologia e a implementação em uma plataforma
mais flexível de desenvolvimento, este projeto se insere no cenário de tecnologias
assistivas com a proposta de desenvolver uma interface de comando de uma
cadeira virtual baseada em sinal bioelétrico. A ferramenta tem o propósito de ser
utilizada como treinamento para usuários que venham a utilizar uma cadeira
motorizada real com sistema de controle por EMG. Com esse objetivo foram
traçadas as seguintes metas:
- Detectar EMG em determinados pontos na superfície da face (EMG de superfície
ou sEMG), o que viabiliza sua aplicação como sinal de controle da cadeira no
ambiente virtual (AV).
- Definir quais técnicas devem ser utilizadas para o processamento do sEMG, a fim
de que possa extrair do sinal as características capazes de representar se ocorreu
uma contração.

14
- Desenvolver um protocolo de comunicação entre o sistema que coleta e
processa o sinal EMG com o AV desenvolvido.
- Desenvolver uma interface e algoritmo de controle da cadeira virtual.
- Desenvolver um sistema de validação do sensor utilizado.
1.3 Justificativa
Sabendo da importância da CRM para mobilidade dos seus usuários com
deficiências motoras severas e da dificuldade em conduzi-la de forma apropriada e
que os testes em cadeiras de rodas reais apresentam riscos à segurança, percebe-
se a importância e necessidade de desenvolver uma ferramenta de treinamento
para utilização da TA de forma segura. A solução encontrada foi utilizar a
tecnologia da realidade virtual (RV) para desenvolver esse sistema de treinamento
para uso da CRM.
Além disso, o sistema proposto em AV oferece alternativas de potencializar a
interação do usuário com a plataforma de treinamento por intermédio da
oportunidade de apresentar um ambiente divertido na forma de jogo e uso de
dispositivos alternativos como o RIFT, evitando assim, que a TA seja abandonada
por falta de motivação e treinamento ineficiente. Algumas pesquisas mostram que
mais 30% de todos os dispositivos TA adquiridos são abandonados pelos usuários
num intervalo de cinco anos de uso, sendo que alguns não chegam a ser utilizados
uma única vez (Verza, 2006; Philips, 1993). O pesquisador Emmel Cruz (2012)
constatou que, num grupo de 91 participantes, 18% dos recursos de TA foram
abandonados. Os motivos mais comuns que levam o usuário a abandonar o uso da
TA (BRACCIALLI, 2007): ausência da participação do usuário no desenvolvimento e
seleção da TA, desempenho ineficiente, alterações nas necessidades do usuário
que a TA não foi capaz de suprir, ausência de treinamentos, baixa aceitação social,
falta de motivação, dispositivos com funcionamento dificultoso e dispositivo com
aparência não estética.
1.4 Estrutura do Trabalho
Estruturalmente, este trabalho está dividido em mais 3 capítulos. O Capítulo 2
aborda o desenvolvimento do projeto, apresentando primeiro uma revisão
bibliográfica onde é comentado sobre alguns trabalhos relacionados e referentes às
aplicações da prática de treinamento em TA, RV como TA, a utilização de RV como

15
treinamento e o treinamento da TA com a utilização de um AV. Ainda no capítulo
dois é descrito os materiais e métodos do trabalho com detalhes técnicos do
desenvolvimento do projeto. No Capítulo 3 são abordados os resultados e
discussões, e por fim no Capítulo 4 são apresentadas as conclusões obtidas pelo
projeto desenvolvido.

16
2 DESENVOLVIMENTO
Na sub-seção 2.1 é feito o levantamento do estado de conhecimento relativo ao
tema de controle alternativo de uma CRM, mais especificamente quanto aos tipos de
sistemas de controle existentes, e os principais trabalhos na área, além de estudos
sobre os sinais e sensores biométricos. Na sub-seção 2.2 são apresentados os
materiais utilizados para implementação do sistema. O método é apresentado na
sub-seção 2.3, incluindo técnicas, ferramentas e outros processos envolvidos. Os
resultados do trabalho são apresentados no capítulo 3 e posteriormente discutidos.
2.4, e posteriormente discutidos nas seções seguintes.
2.1 Revisão bibliográfica
2.1.1 Cadeiras de Rodas
A cadeira de rodas é uma tecnologia assistiva para auxiliar a mobilidade do usuário.
Hoje existem diversos modelos que permitem alterações para proporcionar um maior
conforto ao usuário (ex: largura e profundidade do assento, altura do assento ao
assoalho, descansos do pé, encostos ajustáveis, controles e outros). Levando-se em
consideração o modo de energização da cadeira pode-se dividir em dois principais
grupos: cadeiras de rodas manuais e cadeiras de rodas elétricas (motorizadas).
A cadeira de rodas manual é uma cadeira que pode ser movida manualmente pelo
ocupante ou empurrada por alguém, onde o esforço necessário para que este tipo
de cadeira de locomova depende da força do braço. São largamente utilizadas e
muitas vezes depois de fabricadas elas passam por especialistas (ex:
fisioterapeutas) para serem adaptadas de acordo com as condições do usuário.
Esse tipo de cadeira é geralmente mais leve que o segundo tipo. Dentro desse
grupo existem modelos referentes ao local que a cadeira é utilizada, onde ela é
adaptada às condições do meio que ela é utilizada. Por exemplo, cadeira de rodas
para prática esportiva costuma ter rodas com inclinação diferente e possuem
proteções para amenizar o atrito, e algumas têm formato de triciclo (possuem três
rodas e um desenho alongado). Outro exemplo é a cadeira de rodas utilizada no
hospital. Essas cadeiras de transporte são projetadas para ser conduzidas por um
assistente por meio das alças, e as rodas traseiras são sem aro e menores.
A cadeira de rodas elétrica ou motorizada (CRM) funciona por meio de um par de
motores elétricos que propulsionam o movimento e o controle convencional é feito

17
por um joystick. O sistema de funcionamento da CRM pode ser descrito a partir do
diagrama de blocos representado na Figura 1. A velocidade de rastreamento é uma
função básica cujo objetivo é regular a velocidade da cadeira de rodas para conforto
e segurança do usuário. Além disso, a função recebe um comando por um
dispositivo de entrada, e alguns modelos de cadeiras de rodas apresentam funções
automáticas de evasão de obstáculo para aumentar a autonomia da mesma.
Figura 1 – Esquema geral de uma cadeira motorizada. Fonte: Adaptado: (DING; COOPER, 2005)
Esse tipo de cadeira é bastante útil para usuários incapazes de impulsionar a
cadeira com a força do braço ou para situações em que controlar de forma manual
(com os braços) seja fatigante. Entretanto, uma pesquisa com 200 praticantes
clínicos indicou que muitos usuários da CRM têm dificuldade em controlar a
tecnologia, e os resultados relatados mostram que, de acordo com os médicos,
quase metade das pessoas incapazes de controlar um CRM por métodos

18
convencionais podem se beneficiar de um sistema de controle alternativo (FEHR et
al., 2000).
2.1.2 Cadeiras de Rodas com controle alternativo
De acordo com os dados apresentados, o controle de uma CRM convencional
exige um grau de “habilidade manual” que uma boa parte dos indivíduos com
deficiência física grave não consegue obter de maneira confiável. Como
consequência, pensando sobre alternativas neste contexto que não envolva o
controle por joystick surgiu à área de desenvolvimento de sistemas de
comunicação e controle alternativo para TA. O método mais comum de realizar um
controle alternativo é por meio do monitoramento dos sinais biológicos que estão
diretamente relacionados a uma determinada função do usuário, como por
exemplo, as ondas cerebrais, atividade muscular e movimento dos olhos. O sinal
biológico apresenta padrões (características) para cada ação voluntária do
indivíduo, e ao identifica-los é possível fazer uma correspondência entre esses
padrões (gerados de forma voluntária) com os comandos de controle da cadeira.
Em outras palavras, ao gerar voluntariamente um desses padrões, é possível
utiliza-lo como um gatilho para determinada reação, ou seja, como um comando de
controle.
Controle pelo Movimento da Cabeça
Pajkanović(2013) desenvolveu um sistema de controle por meio de reconhecimento
dos movimentos da cabeça. O projeto consiste em um sistema digital, um
acelerômetro, microcontrolador e um atuador mecânico. O acelerômetro foi usado
para coletar dados dos movimentos da cabeça, e para processar os dados do
sensor foi implementado um algoritmo no microcontrolador. A saída do sistema
está ligada com o atuador mecânico, o qual é utilizado para movimentar o joystick
da cadeira de acordo com o comando do usuário. Assim, o movimento da cabeça
do usuário corresponde a uma posição do joystick. O diagrama de blocos do
sistema é mostrado na Figura 2.

19
Figura 2- Diagrama de blocos do sistema de controle pelo movimento da cabeça Fonte: Adaptado: (PAJKANOVIC; DOKIC, 2013)
O sistema de controle pelo queixo é um controle utilizando um joystick adaptado
para o queixo. Assim como o controle pelo movimento da cabeça o controle pelo
queixo é uma alternativa muito invasiva. O sistema exige que se aplique uma
constante pressão no sensor. O controle pelo queixo é um sistema que requer o
movimento da cabeça. O queixo fica em um suporte de joystick em forma de copo
e é geralmente controlado pela flexão, extensão e rotação do pescoço, sendo que
este tipo de sistema é projetado para um usuário com bom controle da cabeça
(FELZER; NORDMANN, 2007).
Controle pela Voz
Le Hoang Linh ( 2015) desenvolveu um sistema de controle por comando de voz. O
reconhecimento de voz é utilizado para detectar a presença da fala em fundo com
ruído, onde o começo e o final da palavra são detectados por técnica de
processamento de palavras. A principal dificuldade do reconhecimento de voz é no
caso em que a palavra foi dita por diferentes pessoas, com diferenças no tom,
sotaque regional e gênero, os padrões do sinal mudam. Além disso, o ruído e as
alterações dos sinais ao longo do tempo também são um dificultador para o
reconhecimento de voz. O reconhecimento de voz é um método popular, usado
para traduzir a voz humana em comandos. Os modelos comumente usados na
identificação são Hidden Markov Model (HMM), Vector Quantization, MFCC-DTW e
redes neurais. O HMM tem alta precisão, no entanto é muito complexa e gasta
tempo para treinamento. Os modelos MMFFC e DTW são mais simples, não toma
mais tempo de treinamento, porém tem menor precisão se comparado ao HMM.
O método de identificação utilizado para o controle da cadeira foi o de
reconhecimento de letras, ou contagem de números utilizando o microfone como
dispositivo de entrada. Os algoritmos MFCC e DTW são aplicados para a extração
de características e identificação. Os comandos de voz reconhecidos pela CRM
são esquerda, direita, frente e trás.
20
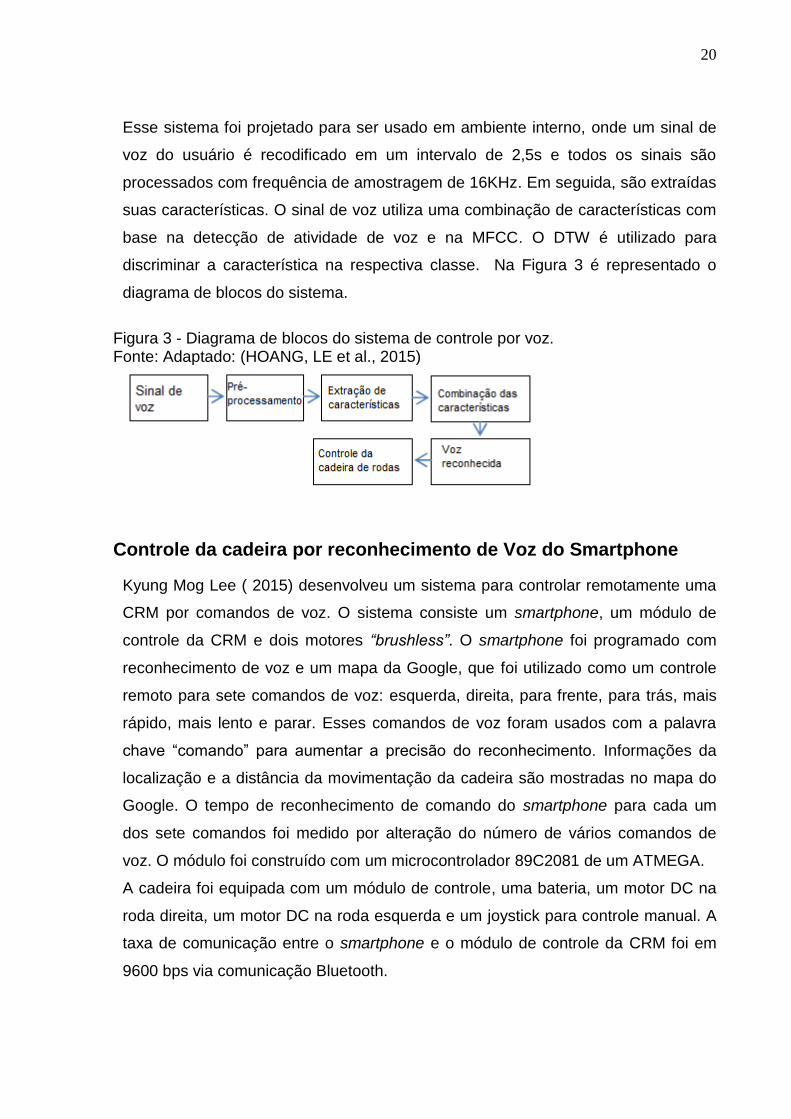
Esse sistema foi projetado para ser usado em ambiente interno, onde um sinal de
voz do usuário é recodificado em um intervalo de 2,5s e todos os sinais são
processados com frequência de amostragem de 16KHz. Em seguida, são extraídas
suas características. O sinal de voz utiliza uma combinação de características com
base na detecção de atividade de voz e na MFCC. O DTW é utilizado para
discriminar a característica na respectiva classe. Na Figura 3 é representado o
diagrama de blocos do sistema.
Figura 3 - Diagrama de blocos do sistema de controle por voz. Fonte: Adaptado: (HOANG, LE et al., 2015)
Controle da cadeira por reconhecimento de Voz do Smartphone
Kyung Mog Lee ( 2015) desenvolveu um sistema para controlar remotamente uma
CRM por comandos de voz. O sistema consiste um smartphone, um módulo de
controle da CRM e dois motores “brushless”. O smartphone foi programado com
reconhecimento de voz e um mapa da Google, que foi utilizado como um controle
remoto para sete comandos de voz: esquerda, direita, para frente, para trás, mais
rápido, mais lento e parar. Esses comandos de voz foram usados com a palavra
chave “comando” para aumentar a precisão do reconhecimento. Informações da
localização e a distância da movimentação da cadeira são mostradas no mapa do
Google. O tempo de reconhecimento de comando do smartphone para cada um
dos sete comandos foi medido por alteração do número de vários comandos de
voz. O módulo foi construído com um microcontrolador 89C2081 de um ATMEGA.
A cadeira foi equipada com um módulo de controle, uma bateria, um motor DC na
roda direita, um motor DC na roda esquerda e um joystick para controle manual. A
taxa de comunicação entre o smartphone e o módulo de controle da CRM foi em
9600 bps via comunicação Bluetooth.

21
A Figura 4 mostra o sistema de conexão de forma detalhada da placa de controle
da CRM e o controlador remoto (smartphone). A placa de controle consiste em um
módulo Bluetooth e um microcontrolador.
Figura 4 - Representação do sistema de conexão entre a cadeira e o smartphone. Fonte: (LEE, 2015)
Controle por um sistema de propulsão da língua
Um exemplo de sistema de controle por propulsão da língua ou Tongue Drive
System (TDS), é o que foi desenvolvido pelo The Georgia Institute of Technology
(KIM et al., 2013), no qual o sistema é uma TA vestível e wireless. Este sistema foi
projetado para indivíduos com deficiência motora grave, como a tetraplegia para
conseguir se locomover em um ambiente por meio do movimento voluntário da
língua. O usuário utiliza um headset que possui quatro sensores magnéticos, dois
em cada lado. Esses sensores são posicionados perto da bochecha. A Figura 5(a)
mostra a representação o módulo. O diagrama na Figura 5(b) demonstra o
funcionamento em níveis do sistema, onde o headset coleta dados dos quatro
sensores magnéticos e transmite-o para receptor do tipo “dongle USB” para PC, ou
para interface do iPhone que envia os comandos para CRM utilizando como base
de comunicação um protocolo assíncrono universal receptor/transmissor (UART) .
Para o desenvolvimento do módulo foram testados quatro dispositivos de controle
alternativo: um mouse de computador, um teclado, o TDS e o sensor de sopro e
sucção mostrado na Figura 5(c). Na Figura 5(d) é representado como foi feito o

22
treinamento do usuário. O usuário usou uma barra magnética na língua feito de
titânio que continha um pequeno marcador magnético em forma de disco, quando o
a língua se movimentava o sensor magnético identificava o movimento de acordo
com a movimentação do marcador fixado na língua.
Figura 5 - Headset TDS e a configuração experimental Fonte: (KIM et al., 2013).
Esse módulo apresenta alguns problemas, como por exemplo, o piercing na língua,
o custo, necessidade de uma limpeza regular, e a dificuldade de utilização. Por ser
um método invasivo, muitos usuários podem preferir um sistema alternativo que
ofereça métodos não invasivos como este.

23
Controle por EOG
Eletroculografia é a técnica de medir o sinal eléctrico gerado pela diferença de
potencial entre a córnea e a retina, resultando em um sinal elétrico do movimento
dos olhos (EOG). Na área de CAA, existem sistemas que utilizam esse sinal.
Borghetti desenvolveu, por exemplo, um sistema de teclado alfanumérico utilizando
dois canais EOG (vertical e horizontal) como controle.
No Núcleo de Tecnologias Assistivas da UFU (NTA) tem sido desenvolvido um
módulo para controle da cadeira por IROG (oculografia por infravermelho)
utilizando um sensor The Eye Tribe® Tracker, um sensor de baixo custo capaz de
detectar as coordenadas do olhar do indivíduo na tela após um processo de
calibração. O comando pode ser enviado para a cadeira por seleção direta, ou seja,
enquanto o olhar do usuário estiver direcionado para um determinado comando,
este é enviado pelo microcontrolador para a cadeira, a qual o executa até que a
direção do olhar se altere.
Controle por EEG
O controle baseado em ondas cerebrais, sinais EEG é uma alternativa real de
controle, pesquisas na área vem sido feitas em diversos lugares no mundo. Uma
versão protótipo foi desenvolvida na California State University Northridge (LIN et
al., 2011). O sensor utilizado nesse processo de detecção é o Emotiv® EPOC+
mostrado na Figura 6. Este sensor possui três diferentes sinais entrada:
expressões faciais, posição da cabeça e sensoriamento cerebral. O headset com o
conjunto de eletrodos para detecção de EEG precisa ser ajustado para otimizar a
sua funcionalidade. As assinaturas das formas de onda são identificadas e
analisadas e em seguida utilizadas para criar um comando de movimento para a
CRM. Esse projeto é um sistema de interface não invasivo, brain-computer
interface (BCI).
O projeto desenvolvido no NTA é um módulo de controle baseado na detecção de
potenciais evocados visualmente em regime estacionário (SSVEP), ou seja, sinais
que podem ser considerados respostas naturais advindas de estimulações visuais
em frequências específicas. A interface possui os itens de controle (setas
direcionais e comando de parar), todos piscando em frequências específicas e
distintas. O sensor capta o sinal provido do usuário e, após um processo de
24
classificação, transforma o sinal em um comando a ser enviado para a cadeira. O
sensor utilizado nesse processo de detecção também é o Emotiv® EPOC+.
Uma das dificuldades da aplicação desse método é o custo do projeto, porém a
principal desvantagem é que a interface de aprendizagem BCI é difícil de controlar.
O usuário pode se distrair e não pensar no comando correto, fazendo com que a
cadeira de rodas reaja de forma inesperada. Isso pode levar a muitas situações de
risco para o usuário.
Figura 6 - Headset Emotiv EPOC – sensor EEG
Controle por sinal EMG
Existem inúmeros dispositivos de TA que utilizam o sinal EMG como forma de
controle e comunicação alternativa, como por exemplo, dispositivos vestíveis de
Interface Homem-Máquina (IHM) para controle de uma CRM ( MOON, , 2005)
controle por meio de cursor bidimensional por EMG ( MALDONADO et al., 2010),
CRM com detector de obstáculos (Sathishbalaji, 2014) e outros. A Figura 7
representa um diagrama de blocos de um sistema de controle de uma cadeira de
rodas por EMG de forma simplificada. As etapas do sistema são divida em coleta
do sinal por meio de eletrodos e um eletromiógrafo, processamento e interpretação
do sinal e envio de comandos para o sistema de controle da CRM.

25
Figura 7- Diagrama de Blocos do sistema de controle de uma CRM por EMG.
2.1.3 Sinal Eletromiográfico
O sinal eletromiográfico (EMG) tem origem quando o cérebro envia o comando
para o músculo se contrair, enviados por meio dos neurônios motores que inervam
as fibras musculares esqueléticas. Quando os neurônios transmitem impulsos
nervosos até a junção neuromuscular é liberado o neurotransmissor acetilcolina,
que por sua vez gera um potencial de ação na proximidade das fibras musculares
com duração de aproximadamente de 8ms. Esse potencial de ação gerado se
propaga ao longo de toda a membrana muscular, gerando a contração muscular
(HALL, 2011). O somatório da propagação dos potenciais de ação das fibras
musculares da unidade motora forma o potencial de ação da unidade motora
(PAUM). Para manter a força exercida pelo músculo, os PAUMs são disparados
repetidamente com uma frequência de 7 a 20 Hz, formando uma sequência
conhecida como PAUM de treinamento (PAUMT). O conjunto de PAUMTs compõe
o sinal de EMG (LEE, 2008). O sinal eletromiográfico possui uma amplitude muito
baixa, na faixa de 0 a 10 mV (pico a pico) ou de 0 a 1,5 mV (RMS). Sua frequência
está entre 0 e 500 Hz, apesar de sua energia dominante estar na faixa de 50 a 150
Hz (LUCA, 2002).
Para a aquisição do sinal EMG é necessária a utilização de eletrodos. Para a coleta
do sinal dois tipos de eletrodos podem ser utilizados, os invasivos e os de
superfície. Os invasivos, como eletrodos intramusculares, são estruturas metálicas
finas que são inseridos por uma agulha no ventre muscular. Eles são capazes de
coletar sinais de músculos bem específicos e reduz a possibilidade de captar
ruídos de cross-talk (interferência de sinais EMG de músculos vizinhos e artefatos
mecânicos). Porém, a desvantagem é que causam desconforto ao paciente, e isso

26
o inviabiliza em aplicações que exigem repetições do experimento. Os eletrodos de
superfície são compostos por material de Ag/AgCl, e para fixa-los na pele é
necessário a utilização de um gel (pasta condutora) que contém íons de cloro, com
o objetivo de diminuir a impedância entre o eletrodo e a pele. Para captar sinais
mais precisos, deve-se realizar a tricotomia e a remoção da camada superficial da
pele. A desvantagem da utilização desse eletrodo é a possibilidade de cross-talk
(BARROS, 2005).
Para o registro eletromiográfico pode ser utilizado dois tipos de configuração,
bipolar ou monopolar. A configuração monopolar é a menos comum, onde o
eletrodo é colocado sobre ou dentro do músculo e o eletrodo de referência é
colocado sobre uma parte não muscular do corpo. A desvantagem desta
configuração é que detecta todos os sinais dos músculos vizinhos. A configuração
bipolar é composta pelo eletrodo positivo, eletrodo negativo e o eletrodo de
referência. Nessa configuração, o sinal EMG é a medido pela diferença potencial
entre os dois eletrodos.
2.1.4 Realidade Virtual aplicada às Tecnologias Assistivas
Sabe-se que a RV tem um grande impacto na área de TA. Durantes as últimas
décadas, pesquisas relacionadas a aplicação desse tipo de tecnologia tem levado à
criação de sistemas e exemplos de casos simples que apresentam grande
potencial para monitorar o desempenho, avaliação funcional e reabilitação do
indivíduo com deficiência. Em função dos avanços tecnológicos, aumentaram-se as
formas de como a RV pode ser aplicada para reabilitação e suporte de apoio para
uma variedade de grupos de usuários finais, tanto de profissionais da saúde como
de pacientes com diferentes necessidades e com habilidades especificas. A RV de
forma geral é uma grande ferramenta para auxiliar nos campos de reabilitação,
treinamento e avaliação. Desta forma pessoas com deficiências estão usando cada
vez mais a tecnologia para a vida independente. São exemplos da utilização da
realidade virtual para desenvolver interfaces, jogos, simulações, ambientes virtuais
e outros. De forma geral, o papel principal dessas tecnologias desenvolvidas por

27
meio da RV é providenciar melhoria da vida social e inclusão de todas as pessoas
com deficiência, independente da idade ou gênero (SANCHEZ et al., 2011).
Um exemplo de aplicação da RV na área de reabilitação é do jogo desenvolvido
para reduzir quedas de pessoas idosas com problemas de equilíbrio (LANGE et al.,
2011). Neste projeto, foi levantado por meio de dados estatísticos que um terço das
pessoas acima de 65 anos tem problemas de equilíbrio e que isso muitas vezes
resulta em quedas constantes. Essas quedas são responsáveis por causar uma
deficiência significativa, reduzir a função física e perda de independência. Revisões
sistemáticas sobre estudos de intervenções de quedas têm estabelecido que
programas de prevenção podem reduzir as quedas. Jogos de dança que detectam
os movimentos do jogador têm demonstrado uma melhora na qualidade de vida
para crianças e jovens. Entretanto, estes jogos muitas vezes incluem música de
ritmo acelerado, movimentos de saltos e uma sobrecarga de informação visual na
tela que não promove um resultado positivo para reabilitação de pessoa idosas.
Portanto, percebeu-se a necessidade em desenvolver um protótipo em RV,
específico para atender as necessidades dessas pessoas de buscar uma melhora
no equilíbrio e reduzir as quedas.
Resultados de uma pesquisa feita com 200 especialistas sobre as dificuldades
encontradas pelos usuários de CRMs apontam uma necessidade, não para mais
inovação nas interfaces de direção, mas para criação de novas tecnologias para
navegação autônoma supervisionada. Quase a metade dos pacientes da pesquisa
é incapaz de controlar uma cadeira de rodas de forma que testes com cadeiras de
rodas reais possam envolver riscos à segurança (FEHR et al., 2000). Diante deste
fato, encontra-se a necessidade da utilização ferramentas de treinamento que não
tenha risco a segurança ao usuário. Os primeiros simuladores de condução de
CRMs foram desenvolvidos na década de 90 para solucionar este tipo de
problemática. Dado como exemplo, em 1998 McComas desenvolveu trabalhos
utilizando RV para auxiliar crianças com deficiência para reabilitação, minimizar os
efeitos da deficiência, e para aperfeiçoamento e formação, utilizando os
simuladores para prática de suas habilidades que possam ser transferidas para o
mundo real.

28
2.1.5 Cadeira de Rodas Virtuais
A proposta de utilizar RV para desenvolver ambientes virtuais (AV) para capacitar
usuário de CRMs não é uma novidade. Projetos de simulação para treinamento de
crianças deficientes para operar uma CRM é um exemplo (HASDAI et al., 1995). O
objetivo do trabalho na época foi avaliar a capacidade de um simulador de
condução para avaliar e treinar as crianças com deficiência para operar uma
cadeira de rodas motorizada. Os resultados encontrados foram que os condutores
inexperientes aumentaram significativamente a seu desempenho no simulador
durante o período de treinamento. Seu desempenho na cadeira de rodas real foi
significativamente melhor após o treinamento em simulador, embora seu
desempenho manteve-se mais baixo do que os motoristas experientes. Deste
modo, pode-se confirmar que um simulador pode ajudar no desenvolvimento e
avaliação das habilidades necessárias para operar uma CRM. Os projetos para
treinamento mais recentes buscam focar na interação do usuário e imersão, com
simulações precisas dos sensores e comportamentos físicos. A operação de uma
CRM por controle alternativo necessita de treinamento assim com uma CRM de
controle convencional. Nos últimos anos foram desenvolvidos sistemas de controle
alternativo capazes de controlar não somente CRM reais mais também simuladores
de CRM virtuais. Por exemplo, a interface de controle vestível (GULREZ et al.,
2016). Este sistema foi apresentado para ser capaz de aprender os movimentos do
usuário por meio de mapeamento dos graus de liberdade dos movimentos do
mesmo e estabelecer assim padrões para enviar comandos para a cadeira real e
virtual. A Figura 8 serve para ilustrar o dispositivo vestível e o quadro geral do
projeto.

29
Figura 8 - Protótipo do sistema de Interface de controle sem às mãos. (a) mostra o protótipo do dispositivo vestível e a Figura 8 (b) quadro geral do sistema.
Fonte: (GULREZ et al., 2016)
(a)
(b)

30
2.2 Materiais e Métodos
2.2.1 Elaboração do sistema de controle da cadeira virtual por sEMG
O primeiro passo no desenvolvimento do projeto consistiu na definição do tipo de
sinal de entrada, hardware, funções e opções da interface de controle de acordo
com os objetivos do projeto. Para isso utilizou-se como referência o trabalho
desenvolvido anteriormente por Silva (2013).
O trabalho referenciado utilizou para a aquisição do sinal o equipamento
MyosystemBr1 com um software dedicado para processar o sinal em tempo real. O
processamento consistiu em calcular a envoltória do sinal EMG com uma janela de
125ms. Foram utilizados dois canais de eletromiografia como dado de entrada do
sistema, onde os comandos definidos para controlar a cadeira foram: frente, atrás,
direita e esquerda. Um dos canais EMG foi associado com os dois primeiros
comandos e o outro com os dois últimos comandos. A modelagem do ambiente
virtual foi desenvolvida com o 3DVirtools e C++. A comunicação dos sistemas foi
feita por meio de um servidor socket, com ambos os softwares, de processamento
e o simulador virtual, agindo como clientes conectados ao servidor que permite a
troca de informações entre os dois sistemas.
Desta forma, o projeto proposto é uma versão modular do sistema existente em
uma plataforma mais atualizada e flexível. Para o desenvolvimento do projeto de
controle da cadeira virtual por sEMG, o trabalho foi dividido nas seguintes etapas:
1) Definição dos materiais e ferramentas para programação.
2) Aquisição do Sinal sEMG
3) Processamento do Sinal sEMG
4) Comunicação entre o Arduino e o Ambiente Virtual.
5) Definição da interface do módulo de controle da Cadeira Virtual
Para o projeto de sistema de controle da cadeira virtual por sEMG foram
construídos os diagramas da Figura 9 e da Figura 10 para representar o conceito
abstrato das interligações entre as plataformas utilizadas no sistema.
31
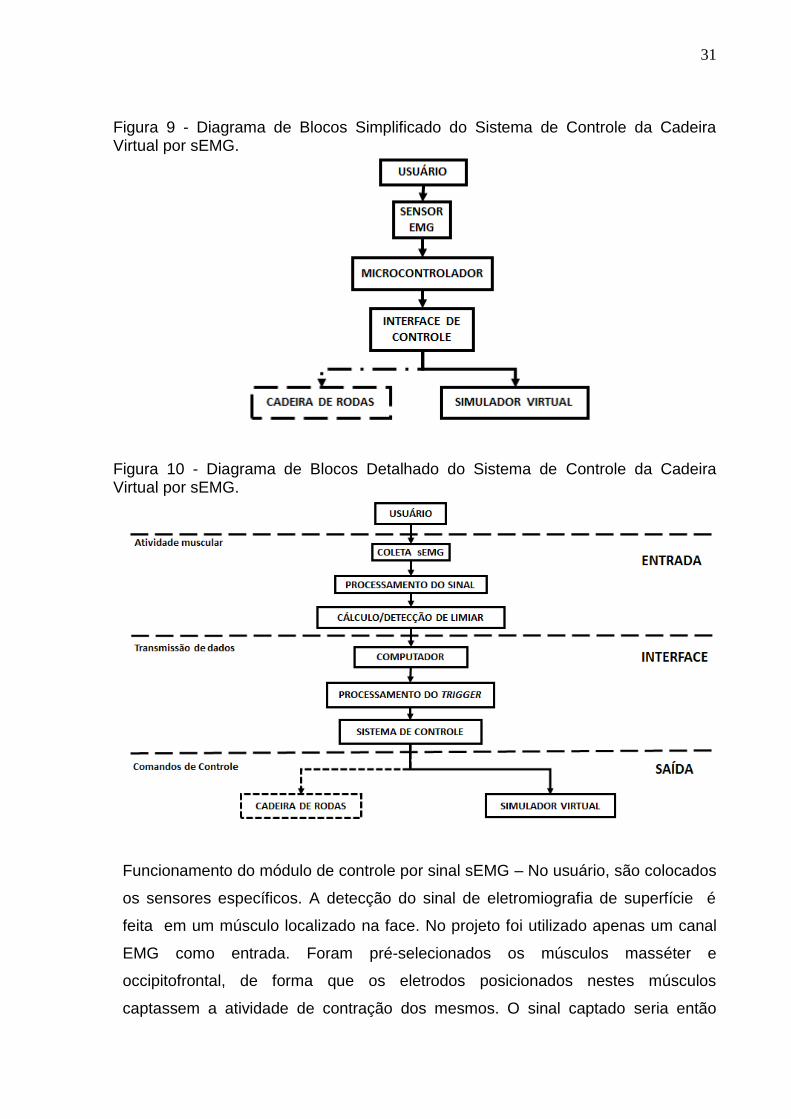
Figura 9 - Diagrama de Blocos Simplificado do Sistema de Controle da Cadeira Virtual por sEMG.
Figura 10 - Diagrama de Blocos Detalhado do Sistema de Controle da Cadeira Virtual por sEMG.
Funcionamento do módulo de controle por sinal sEMG – No usuário, são colocados
os sensores específicos. A detecção do sinal de eletromiografia de superfície é
feita em um músculo localizado na face. No projeto foi utilizado apenas um canal
EMG como entrada. Foram pré-selecionados os músculos masséter e
occipitofrontal, de forma que os eletrodos posicionados nestes músculos
captassem a atividade de contração dos mesmos. O sinal captado seria então
32
filtrado, processado e transformado em um comando do tipo trigger (gatilho) para
uma interface apresentada para o usuário. Para o processamento do sinal, foi
utilizado um processo de detecção limiar dinâmico, calculado a partir de uma janela
de 200 amostras coletadas e armazenadas no microcontrolador.
2.2.2 Definição dos materiais e ferramentas para programação
i. Definição dos materiais para coleta do sinal de eletromiografia
Para a coleta do sinal de eletromiografia foram utilizados eletrodos de superfície
passivos de Ag/AgCl em configuração bipolar. A utilização dessa configuração é
uma tentativa de eliminar interferências oriundas de outras atividades biológicas do
paciente ou da rede elétrica, já que por meio da utilização de um amplificador
diferencial com alta taxa de rejeição de modo comum (CMRR), qualquer ruído
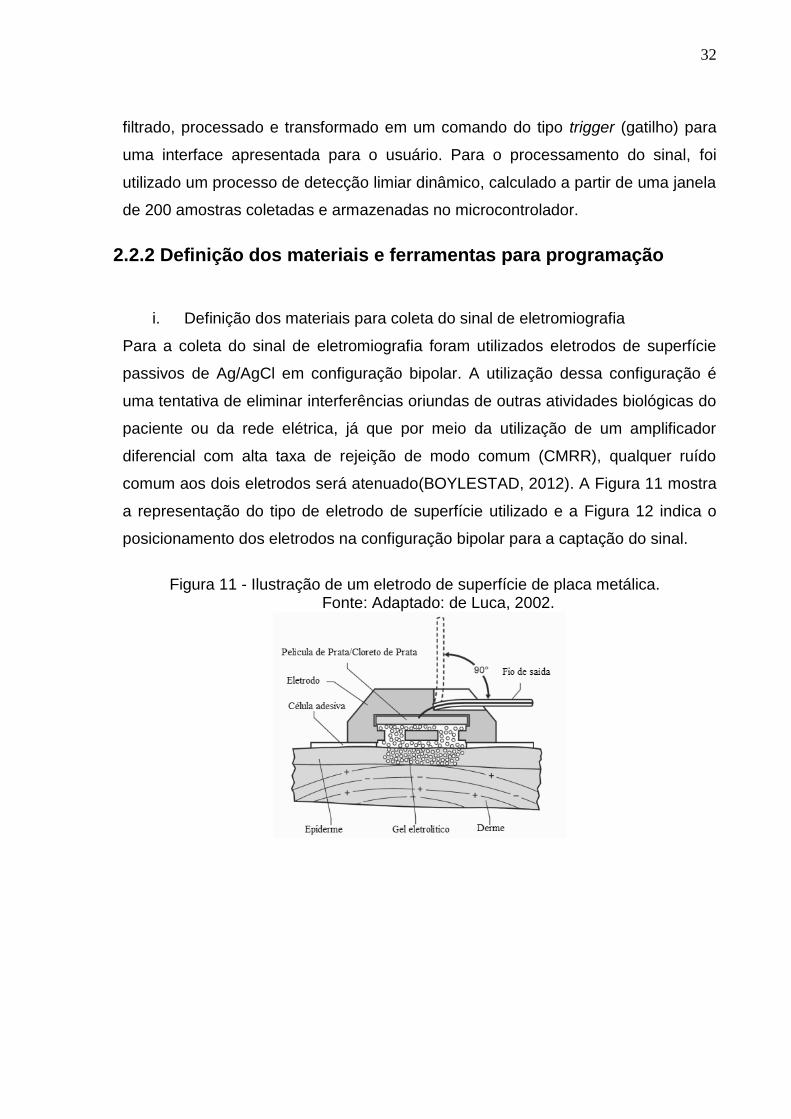
comum aos dois eletrodos será atenuado(BOYLESTAD, 2012). A Figura 11 mostra
a representação do tipo de eletrodo de superfície utilizado e a Figura 12 indica o
posicionamento dos eletrodos na configuração bipolar para a captação do sinal.
Figura 11 - Ilustração de um eletrodo de superfície de placa metálica.
Fonte: Adaptado: de Luca, 2002.

33
Figura 12 - Eletrodos posicionados na configuração bipolar. Fonte: de Luca,2002.
Na escolha do sensor para desenvolvimento do módulo, levou-se em consideração
três fatores principais:
- Valor de aquisição acessível;
- Desenvolvido especificamente para microcontroladores;
- Wearable Design (Design Vestível);
O sensor escolhido foi o Myoware da fabricante Adafruit. O sensor em questão
detecta a atividade elétrica muscular, em seguida converte-a para uma voltagem
variável que é lida no pino de entrada analógico de um microcontrolador. Além de
atender aos requisitos mínimos para aplicação do projeto, o Myoware tem duas
opções de outputs, o sinal bruto e o sinal encapsulado (envoltória do sinal). Essa
característica do sensor oferecer à envoltória do sinal evita a necessidade de
algumas de processamento do sinal. Esse modelo de sensor é compacto que
permite aplicações tanto indoor com outdoor, diferente do MyoSystemBr1
(mostrado na Figura 13) utilizado no projeto anterior. A Figura 14 mostra o sensor
Myoware e o layout do sensor é mostrado na Figura 15.
Figura 13 - Equipamento MyoSystemBr1 Fonte: (SILVA et al., 2013).

34
Figura 14 - Sensor Myoware Fonte: (Datasheet Myoware,2016).
Figura 15 - Layout do Sensor Myoware. Fonte: (Datasheet Myoware ,2016).
ii. Definição do microntrolador
Para a escolha do microntrolador do projeto levou-se em consideração os
seguintes requisitos:
- Acessibilidade;
- Compatibilidade com o sensor EMG.
- Experiência prévia com o microcontrolador;
- Flexibilidade de programação para posteriores ajustes;
- Tempo de resposta necessário para o processamento;
- Possibilidade de utilização em sistemas embarcados;
Deste modo, foi o escolhido o Arduino (mostrado na Figura 16) como kit de
desenvolvimento do projeto. O Arduino é uma plataforma de prototipagem
eletrônica de hardware livre e de placa única projetada com um microcontrolador

35
Atmel AVR com suporte de entrada/saída embutido e utiliza a linguagem de
programação padrão C/C++. Porém, a programação do Arduíno não usa o mesmo
esqueleto de programação adotada na programação ANSI C padrão. Além disso,
ele disponibiliza muitas funções que abstraem o hardware e facilita o
desenvolvimento do algoritmo.
Comparando-se com as outras opções de microcontrolador o Arduino possui a
melhor relação custo e benefício para o projeto. Qualquer modelo de Arduino é
compatível para a função desejada, não precisando fazer nenhuma alteração do
projeto caso haja a necessidade de alterar o modelo de microncontrolador.
Figura 16 - Ilustração do Arduino. Fonte: (Datasheet Arduino,2016).
iii. Definição do Simulador e a linguagem de programação
O simulador utilizado anteriormente foi o ViEW (MORÈRE, 2015) Apesar de possuir
todas as funções necessárias para uma simulação do tipo a versão utilizada até
então não apresentava muita compatibilidade para implementação de dispositivos
mais atuais para controle, como por exemplo dispositivos de eye tracking, (Rift®,
The Eye Tribe® Tracker, e outros). Além disso, para fazer implementação no ViEW
é necessário instalar a versão 2005 do Visual StudioTM, considerada obsoleta para
desenvolvimento de novas aplicações.
Atualmente está sendo desenvolvido uma nova versão do ViEW na plataforma
Unity 3D. A plataforma é uma engine (motor gráfico) para desenvolvimento de
jogos 3D e 2D. Ela apresenta um editor visual que torna possível visualizar todo o
desenvolvimento de acordo com um contexto WYSIWYG (what you see is what you
36
get, algo como “o que você vê é o que você tem”). Diferente da plataforma utilizada
na versão anterior, essa engine é compatível em diferentes sistemas operacionais
(multiplataforma). Além disso, o sistema desenvolvido nessa engine tem a
flexibilidade para ser implementado com dispositivos alternativos de controle.
Em razão disso, foi utilizado um simulador desenvolvido em Unity denominado de
uViEW. Na escolha de plataforma de desenvolvimento da interface e o sistema de
controle do módulo, levou-se em consideração experiência prévia com a
linguagem, flexibilidade de programação para posteriores ajustes, resposta rápida
de processamento e principalmente compatibilidade com o simulador. Assim, a
linguagem escolhida para desenvolvimento foi o C# e a plataforma utilizada foi o
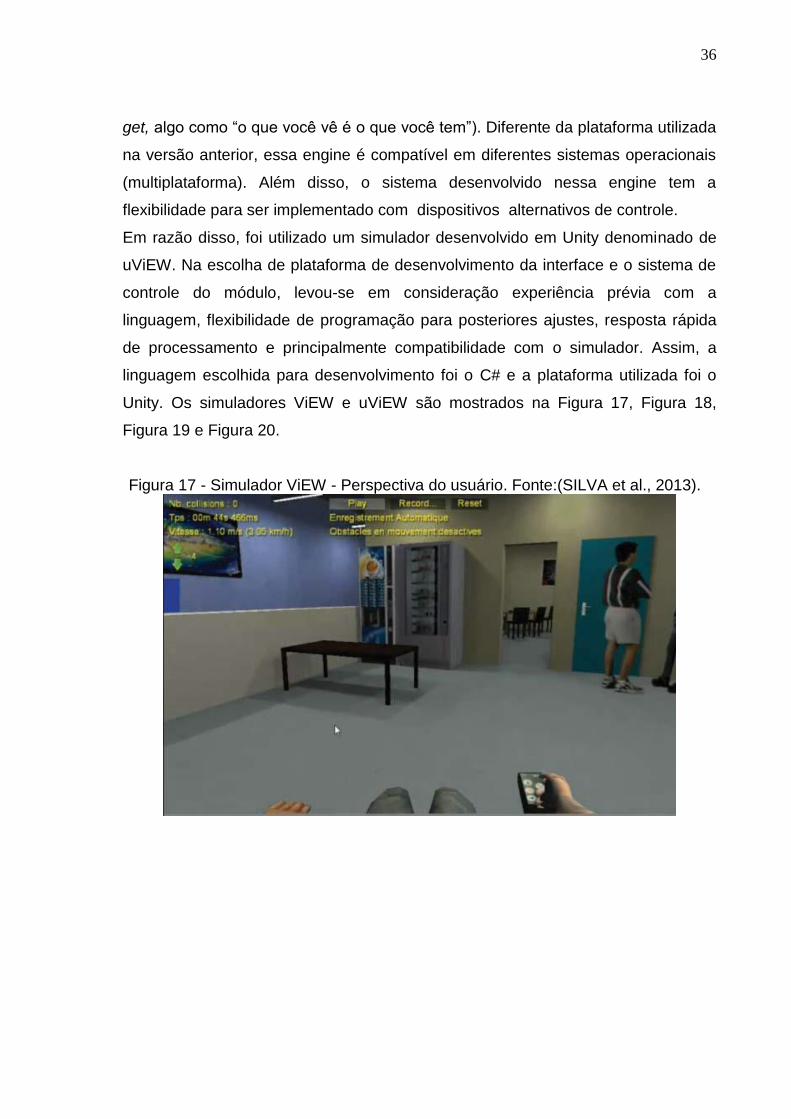
Unity. Os simuladores ViEW e uViEW são mostrados na Figura 17, Figura 18,
Figura 19 e Figura 20.
Figura 17 - Simulador ViEW - Perspectiva do usuário. Fonte:(SILVA et al., 2013).

37
Figura 18 - Simulador Virtual ViEW na visão lateral. Fonte:(SILVA et al., 2013).
Figura 19 - Simulador uViEW na perspectiva do usuário
38
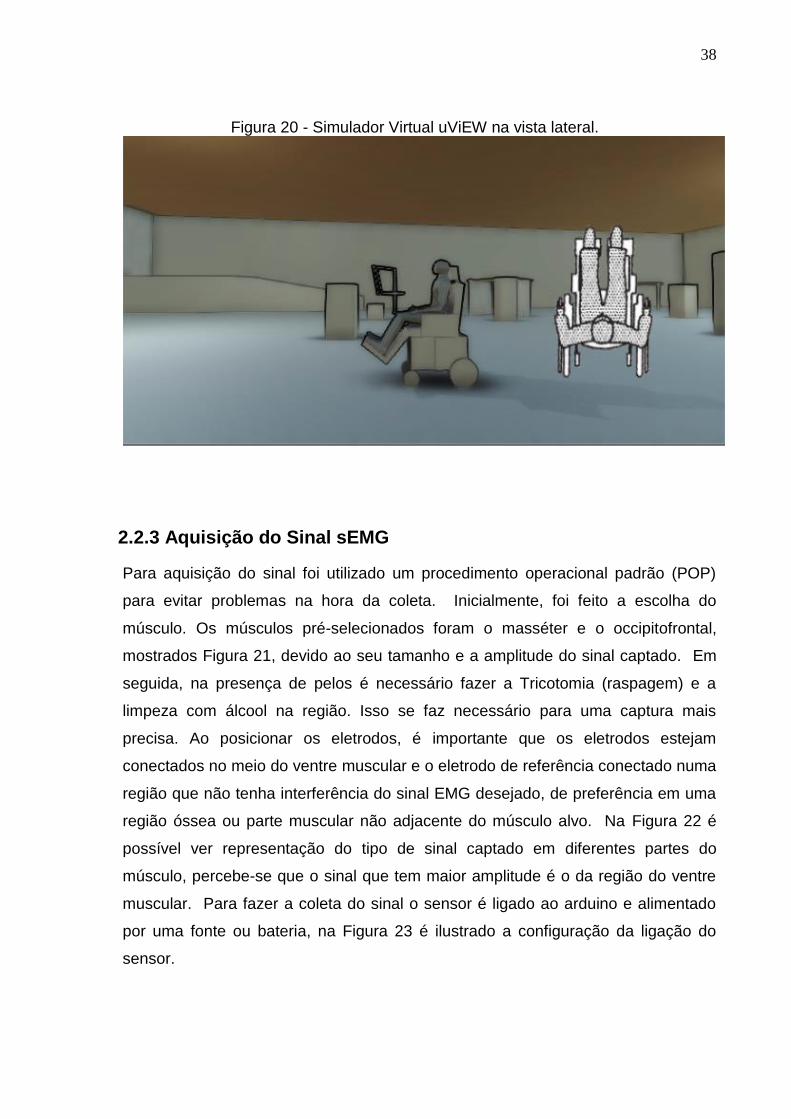
Figura 20 - Simulador Virtual uViEW na vista lateral.
2.2.3 Aquisição do Sinal sEMG
Para aquisição do sinal foi utilizado um procedimento operacional padrão (POP)
para evitar problemas na hora da coleta. Inicialmente, foi feito a escolha do
músculo. Os músculos pré-selecionados foram o masséter e o occipitofrontal,
mostrados Figura 21, devido ao seu tamanho e a amplitude do sinal captado. Em
seguida, na presença de pelos é necessário fazer a Tricotomia (raspagem) e a
limpeza com álcool na região. Isso se faz necessário para uma captura mais
precisa. Ao posicionar os eletrodos, é importante que os eletrodos estejam
conectados no meio do ventre muscular e o eletrodo de referência conectado numa
região que não tenha interferência do sinal EMG desejado, de preferência em uma
região óssea ou parte muscular não adjacente do músculo alvo. Na Figura 22 é
possível ver representação do tipo de sinal captado em diferentes partes do
músculo, percebe-se que o sinal que tem maior amplitude é o da região do ventre
muscular. Para fazer a coleta do sinal o sensor é ligado ao arduino e alimentado
por uma fonte ou bateria, na Figura 23 é ilustrado a configuração da ligação do
sensor.

39
Figura 21 - lustração dos músculos selecionados para aquisição do sinal EMG.
Fonte: Adaptado: (PUTZ, 2000)
.
Figura 22 - Ilustração do posicionamento do sensor no músculo. Fonte: Adaptado: (TECHNOLOGIES, 2015)

40
Figura 23 - Ilustração da ligação do Sensor no Arduino.
Fonte: Adaptado: (TECHNOLOGIES, 2015)
2.2.4 Processamento do sinal EMG
Os sinais captados pelos eletrodos possuem amplitudes muito baixas. Além disso,
sua detecção é contaminada por interferências. Sendo assim, o condicionamento
do sinal é necessário para minimizar essas interferências para então poder
manipula-lo. A manipulação do sinal foi feito por técnicas de processamento digital
de sinais (PDS). O objetivo do PDS é medir, filtrar e/ou comprimir sinais analógicos
contínuos.
A primeira etapa para processar o sinal é digitaliza-lo, por meio do conversor
analógico-digital, que transforma o sinal analógico para uma sequência de valores
digitais de forma discreta. Existem inúmeras aplicações para PDS, estão inclusos
o processamento de sinais sonoros, estimação espectral, imagens digitais,
biomedicina, processamento de controle, entre outros.
Nesta etapa do projeto, o sensor que está ligado ao Arduino (constituído por um
microcontrolador do modelo ATmega328 que possui um conversor A/D de 10 bits
com precisão de ± 2 LSBs), onde o sinal é digitalizado, processado e transmitido
para a interface de controle do simulador virtual. Após a conversão do sinal
analógico para o digital é iniciada a rotina de processamento do sinal, a Figura 24
ilustra o fluxograma dessa rotina. No final do processamento é identificada a ação
do usuário (neste caso se houve contração muscular ou não), se ação do usuário

41
foi uma contração o processador envia uma trigger (do tamanho de dois bytes do
tipo char) para o sistema de controle do simulador.
O processamento do sinal foi feito de forma embarcada, no qual o computador é
completamente dedicado ao dispositivo (ao sistema que ele controla). Deste modo,
é possível aperfeiçoar o projeto reduzindo custos, tamanho e recursos
computacionais do projeto.
Figura 24 - Fluxograma da rotina do processamento da Trigger.
No primeiro momento, a média do sinal é verificada, por meio do “janelamento” do
sinal, ou seja, a cada janela com 200 amostras do sinal e calculado a média e o
valor RMS (Root Mean Square ou Raiz do Valor Quadrático Médio) do sinal. Para
determinar o limiar do sinal em repouso é feita verificação se é o estado inicial.
Para determinar o limiar de contração, foi utilizado o teorema da distribuição normal
padronizada.
42
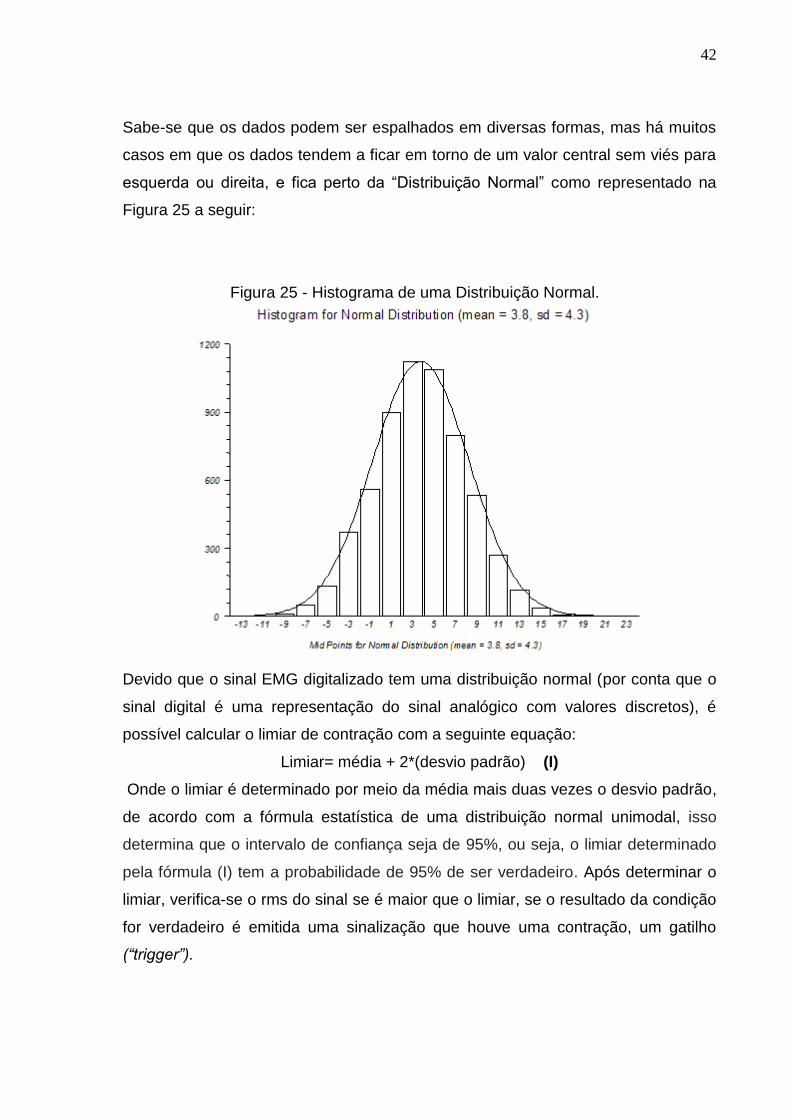
Sabe-se que os dados podem ser espalhados em diversas formas, mas há muitos
casos em que os dados tendem a ficar em torno de um valor central sem viés para
esquerda ou direita, e fica perto da “Distribuição Normal” como representado na
Figura 25 a seguir:
Figura 25 - Histograma de uma Distribuição Normal.
Devido que o sinal EMG digitalizado tem uma distribuição normal (por conta que o
sinal digital é uma representação do sinal analógico com valores discretos), é
possível calcular o limiar de contração com a seguinte equação:
Limiar= média + 2*(desvio padrão) (I)
Onde o limiar é determinado por meio da média mais duas vezes o desvio padrão,
de acordo com a fórmula estatística de uma distribuição normal unimodal, isso
determina que o intervalo de confiança seja de 95%, ou seja, o limiar determinado
pela fórmula (I) tem a probabilidade de 95% de ser verdadeiro. Após determinar o
limiar, verifica-se o rms do sinal se é maior que o limiar, se o resultado da condição
for verdadeiro é emitida uma sinalização que houve uma contração, um gatilho
(“trigger”).
43
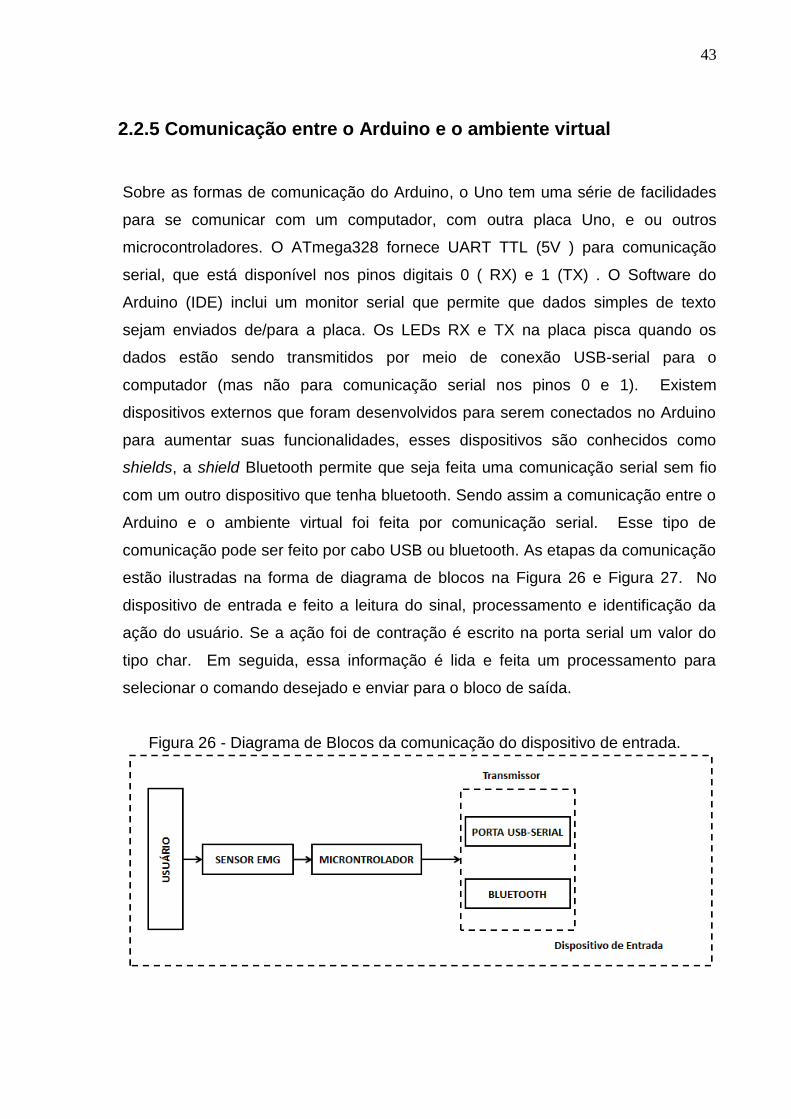
2.2.5 Comunicação entre o Arduino e o ambiente virtual
Sobre as formas de comunicação do Arduino, o Uno tem uma série de facilidades
para se comunicar com um computador, com outra placa Uno, e ou outros
microcontroladores. O ATmega328 fornece UART TTL (5V ) para comunicação
serial, que está disponível nos pinos digitais 0 ( RX) e 1 (TX) . O Software do
Arduino (IDE) inclui um monitor serial que permite que dados simples de texto
sejam enviados de/para a placa. Os LEDs RX e TX na placa pisca quando os
dados estão sendo transmitidos por meio de conexão USB-serial para o
computador (mas não para comunicação serial nos pinos 0 e 1). Existem
dispositivos externos que foram desenvolvidos para serem conectados no Arduino
para aumentar suas funcionalidades, esses dispositivos são conhecidos como
shields, a shield Bluetooth permite que seja feita uma comunicação serial sem fio
com um outro dispositivo que tenha bluetooth. Sendo assim a comunicação entre o
Arduino e o ambiente virtual foi feita por comunicação serial. Esse tipo de
comunicação pode ser feito por cabo USB ou bluetooth. As etapas da comunicação
estão ilustradas na forma de diagrama de blocos na Figura 26 e Figura 27. No
dispositivo de entrada e feito a leitura do sinal, processamento e identificação da
ação do usuário. Se a ação foi de contração é escrito na porta serial um valor do
tipo char. Em seguida, essa informação é lida e feita um processamento para
selecionar o comando desejado e enviar para o bloco de saída.
Figura 26 - Diagrama de Blocos da comunicação do dispositivo de entrada.
44
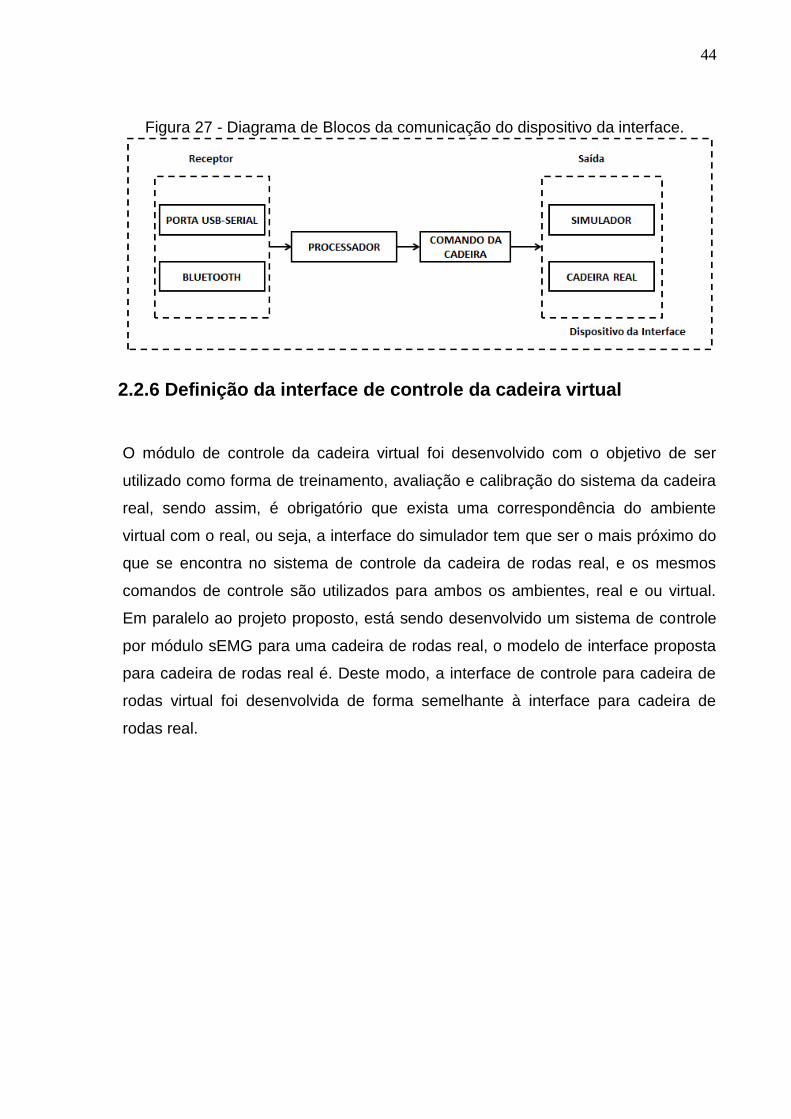
Figura 27 - Diagrama de Blocos da comunicação do dispositivo da interface.
2.2.6 Definição da interface de controle da cadeira virtual
O módulo de controle da cadeira virtual foi desenvolvido com o objetivo de ser
utilizado como forma de treinamento, avaliação e calibração do sistema da cadeira
real, sendo assim, é obrigatório que exista uma correspondência do ambiente
virtual com o real, ou seja, a interface do simulador tem que ser o mais próximo do
que se encontra no sistema de controle da cadeira de rodas real, e os mesmos
comandos de controle são utilizados para ambos os ambientes, real e ou virtual.
Em paralelo ao projeto proposto, está sendo desenvolvido um sistema de controle
por módulo sEMG para uma cadeira de rodas real, o modelo de interface proposta
para cadeira de rodas real é. Deste modo, a interface de controle para cadeira de
rodas virtual foi desenvolvida de forma semelhante à interface para cadeira de
rodas real.

45
3 RESULTADOS E DISCUSSÃO
3.1 Resultados
Após o desenvolvimento do módulo de controle da cadeira virtual por sEMG da
face, obteve-se um programa de processamento embarcado baseado na
linguagem C/C++, uma interface gráfica e um algoritmo em C# para o controle da
cadeira do simulador uViEW. A interface de controle da cadeira virtual foi
desenvolvida de forma semelhante ao da cadeira de rodas real mostrado na Figura
28 e Figura 29. Na Figura 30 e Figura 31 é possível visualizar a interface de
controle da cadeira virtual.
Figura 28 - Interface de controle proposta para uma cadeira de rodas real, primeira janela.
Figura 29 - Interface de controle proposta para uma cadeira de rodas real, segunda janela
46
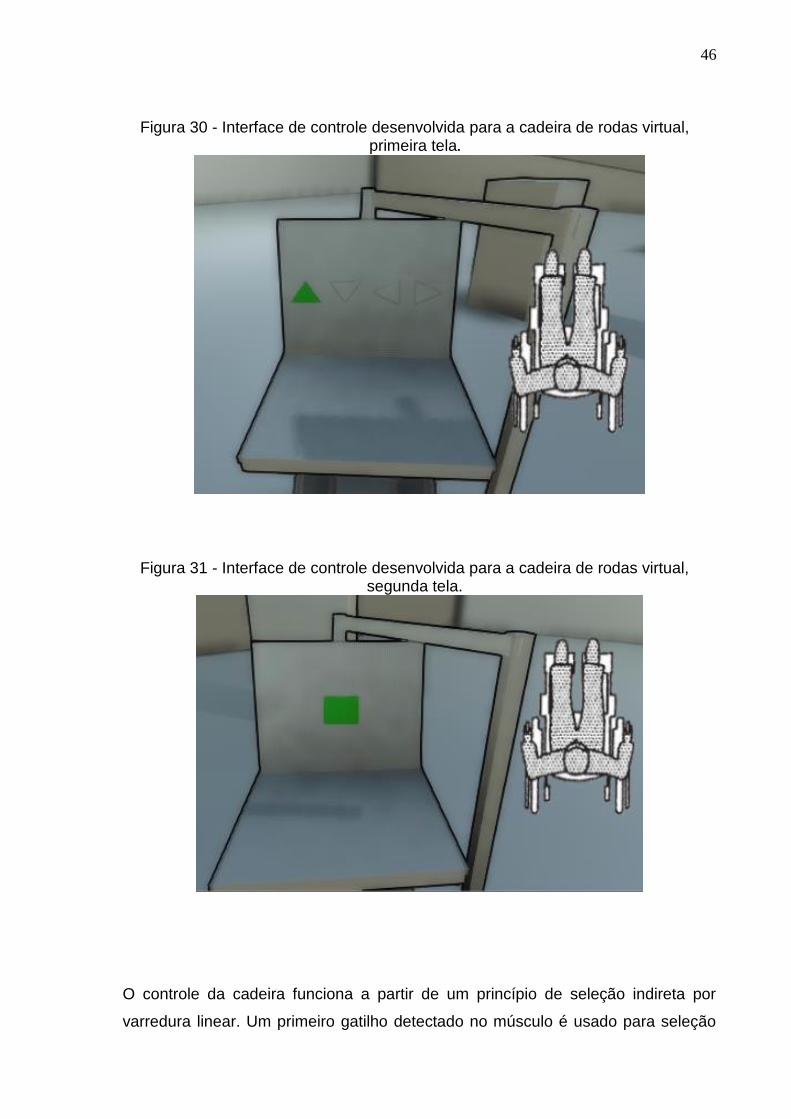
Figura 30 - Interface de controle desenvolvida para a cadeira de rodas virtual, primeira tela.
Figura 31 - Interface de controle desenvolvida para a cadeira de rodas virtual, segunda tela.
O controle da cadeira funciona a partir de um princípio de seleção indireta por
varredura linear. Um primeiro gatilho detectado no músculo é usado para seleção

47
da do movimento desejado (frente, trás, esquerda, direita e pare). Assim que
selecionado o item desejado pelo usuário, que recebe então um feedback visual
indicado qual comando foi selecionado. Este comando é então enviado para a
cadeira, que irá executá-lo até um comando diferente seja recebido. Toda vez que
um comando é selecionado o próximo comando esperado da cadeira é o de “pare”.
Na Figura 30 e Figura 31 é possível ver a seleção do comando “frente” logo em
seguida o próximo comando esperado é de “pare”.
Todo o sistema foi testado por voluntários, foram feitos testes nos músculos do
masseter e do occipitofrontal. Ambos os músculos são localizados na face uma vez
que o objetivo do presente trabalho é fornecer controle do simulador para pessoas
com grave deficiência motoras. O dispositivo de entrada é composto pelo sensor
Myoware, Arduino e o programa para processamento do sinal. A comunicação
entre o dispositivo de entrada e a interface é verificada pelo algoritmo de controle
da cadeira (Figura 32), e o teste final do projeto é mostrado na Figura 33.
Figura 32 - Mensagem ao usuário avisando que o sensor está desconectado

48
Figura 33 - Teste do projeto.
3.2 Discussão
Os resultados obtidos com os primeiros testes foram que o voluntário conseguiu
conduzir a cadeira de rodas, os comandos foram passados de forma rápida para
ambiente virtual que proporcionou uma boa resposta e um bom feedback para o
usuário. Entretanto, durante a fase de testes com outros voluntários percebeu-se a
necessidade de desenvolver um sistema de calibração do limiar de contração.
Uma vez que o sistema de detecção funciona perfeitamente com algumas pessoas
e com outras não desempenha de forma plena, foi identificado problemas de
detecção de contração duplicada e de falta de reconhecimento de contração em
determinados momentos do teste. Dessa forma, o sistema calibração ajudaria
detectar características especificas do sinal cada usuário, e ajustando a detecção
de contração de forma mais precisa. Verificou-se que a comunicação serial, entre
os dispositivos de entrada e o simulador, teve um bom desempenho, não
apresentando problemas durante os testes.
O sistema de controle foi desenvolvido para que o usuário pudesse controlar a
cadeira de forma simplificada, com menor número de contrações possíveis e uma
demanda menor sinais EMG. Desta forma, o módulo utiliza apenas um canal EMG

49
diferente do trabalho anterior que utilizou dois canais, e o sistema de seleção dos
comandos da cadeira foi desenvolvido baseado no princípio de seleção indireta por
varredura linear. Para trabalhos futuros, o método precisa passar por um processo
de validação para saber se o sistema pode ser utilizado por mais tempo sem gerar
fadiga muscular, seriam necessários testes mais extensos, com duração maior de
20 minutos, não realizados neste trabalho.
4 CONCLUSÕES
O presente trabalho criou a oportunidade para o aprendizado de áreas específicas
dentro da Engenharia Biomédica, e por ser um trabalho com conhecimentos da
área de Tecnologia Assistiva e Realidade Virtual, o trabalho proporcionou contato
com tecnologias emergentes da área e um melhor entendimento da mesma.
Neste trabalho, foi desenvolvido um módulo de controle para uma cadeira virtual
por sinais de eletromiografia de músculos faciais. O módulo apresenta uma
interface de controle que funciona com o princípio de seleção indireta por varredura
linear. A interface mostrou-se capaz de operar a cadeira virtual com o uso do
sensor, porém apresentou dificuldade para detectar contração muscular em alguns
testes. Por usar um método de seleção indireta, o sistema funciona a partir de um
gatilho, e dessa forma não são necessários dois músculos para interagir com ele
fazendo com que o treinamento seja feito de forma simplificada.
Em vista das perdas de contração observadas, o próximo passo do projeto é
buscar outras formas de processar o sinal para aumentar o desempenho de
detecção, além disso, desenvolver um sistema de validação do sensor para auto
avaliação do projeto. Após alcançar esses dois objetivos, o próximo passo é fazer
testes com módulo funcionando com dispositivos que aumente a imersão do
usuário no simulador, neste caso deverá ser utilizado o Rift, tendo em vista que, o
objetivo final é oferecer uma ferramenta confiável e robusta para comunidade
externa como ferramenta de auxilio ao treinamento da cadeira de rodas com
controle alternativo.

50
5 REFERÊNCIAS
C. P. Maldonado, A. S. Wexler, S. S. Joshi: “Two dimensional cursor-to-target
control from single muscle site sEMG signals”, IEEE Transactions on Neural
Systems and Rehabilitation Engineering, vol. 18, no. 2, April, 2010.
HALL, J. E. Tratado de fisiologia médica. São Paulo: Elsevier, 2011.
Lee Y, Lee M: SMS Application Using EMG Signal of Clenching Teeth for e-Health
Communication. Telemedicine and e-Health 2008, 14:593-597.
LUCA, C. J. D. Surface electromyography: detection and recording. University
Hospital: DelSys Incorporated, 2002. v. 10.
BRACCIALLI, L. M. P.. Tecnologia assistiva: perspectiva de qualidade de vida para
pessoas com deficiência. In: Roberto Vilarta; Gustavo Luis Guierrez; Teresa Helena
P Freire de Carvalho; Aguinaldo Gonçalves. (Org.). Qualidade de vida e novas
tecnologias. Campinas: IPES, 2007, v. , p. 105-114.
CRUZ, D. M. C. ; EMMEL, M. L. G. . Uso e abandono de tecnologia assistiva por
pessoas com deficiência física no Brasil. Lecturas Educación Física y Deportes
(Buenos Aires), v. 17, p. 1-8, 2012.
ADELOLA IA., COX SL, RAHMAN A. Virtual environments for powered to
wheelchair learner drivers: case studies. Technology and Disability, vol. 21; 2009.
p. 97-106.
Erren-Wolters et al. Virtual reality for mobility devices: training applications and
clinical results: a review. International Journal of Rehabilitation Research, vol.
30; 2007. p. 91-96.
IHMAN, D. et al. Teaching orthopedically impaired children to drive motorized
wheelchairs in virtual reality. Center on Disabilies Virtual Reality Conference; 1994.

51
BARROS, K. R. Metodologia Para Classificação de Sinais EMG Para Controle de
Próteses com Baixo Esforço Computacional. , 2005.
BERSCH, R. Introdução À Tecnologia Assistiva. , p. 29, 2013.
BOYLESTAD, R. L. Introdução à análize de circuitos. , 2012.
CENSO. Cartilha do Censo 2010: Pessoas com Deficiência. , 2010. Disponível em:
<http://www.ibge.gov.br/estadosat/temas.php?tema=censodemog2010_defic>. .
DING, D.; COOPER, R. A. Electric powered wheelchairs. IEEE Control Systems
Magazine, v. 25, n. 2, p. 22–34, 2005.
FEHR, L.; LANGBEIN, W. E.; SKAAR, S. B. Adequacy of power wheelchair control
interfaces for persons with severe disabilities: a clinical survey. Journal of
rehabilitation research and development, v. 37, n. 3, p. 353–60, 2000. Disponível
em: <http://www.ncbi.nlm.nih.gov/pubmed/10917267>. .
FELZER, T.; NORDMANN, R. Alternative wheelchair control. Proc of the 1st
International IEEE-BAIS Symposium on Research on Assistive Technologies, v.
7, p. 67–74, 2007.
GULREZ, T.; TOGNETTI, A.; YOON, W. J.; KAVAKLI, M.; CABIBIHAN, J.-J. A
Hands-free Interface for Controlling Virtual Electric-powered Wheelchairs.
International Journal of Advanced Robotic Systems, p. 1, 2016. Disponível em:
<http://www.intechopen.com/journals/international_journal_of_advanced_robotic_sys
tems/a-hands-free-interface-for-controlling-virtual-electric-powered-wheelchairs>. .
HASDAI, A.; JESSE, A. S.; PATRICE, L. Aya Hasdai, Adam S. Jesse!, Patrice L.
Weiss. , p. 215–220, 1995.

52
HOANG, L. LE; NGGUYEN, T, H.; NGO VAN, T.; et al. MFCC-DTW Algorithm for
Speech Recognition in an Intelligent Wheelchair. IFMBE Proceedings, v. 46, p.
125–128, 2015. Disponível em: <http://www.scopus.com/inward/record.url?eid=2-
s2.0-84928259491&partnerID=tZOtx3y1>. .
INHYUK MOON, MYUNGJOON LEE, JUNUK CHU, AND M. M. Wearable EMG-
based HCI for Electric-Powered Wheelchair Users with Motor Disabilities. , 2005.
International Conference on Robotics and Automation. Disponível em:
<http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=1570513&tag=1>. .
KIM, J.; PARK, H.; BRUCE, J.; et al. The tongue enables computer and wheelchair
control for people with spinal cord injury. Science translational medicine, v. 5, n.
213, p. 213ra166, 2013. Disponível em:
<http://www.ncbi.nlm.nih.gov/pubmed/24285485>. .
KIRNER, C. Realidade Aumentada : Conceitos , Projeto e Aplicações. 2007.
L., S. Electric Wheelchair Controlled by EMG Signals with Obstacle Detection. , v. 2,
n. 2, p. 1409–1412, 2014.
LANGE, B.; FLYNN, S.; CHANG, C. Y.; et al. Development of an interactive stepping
game to reduce falls in older adults. International Journal on Disability and
Human Development, v. 10, n. 4, p. 331–335, 2011.
LEE, K. M. Study on the Electronic Wheelchair Controller with a Smart Phone ’ s
Speaker-independent Recognition Engine. , v. II, p. 21–24, 2015.
LIN, C. T.; EULER, C.; MEKHTARIAN, A.; et al. A brain-computer interface for
intelligent wheelchair mobility. Pan American Health Care Exchanges, PAHCE
2011 - Conference, Workshops, and Exhibits. Cooperation / Linkages: An
Independent Forum for Patient Care and Technology Support, , n. May 2010, p.
316, 2011.
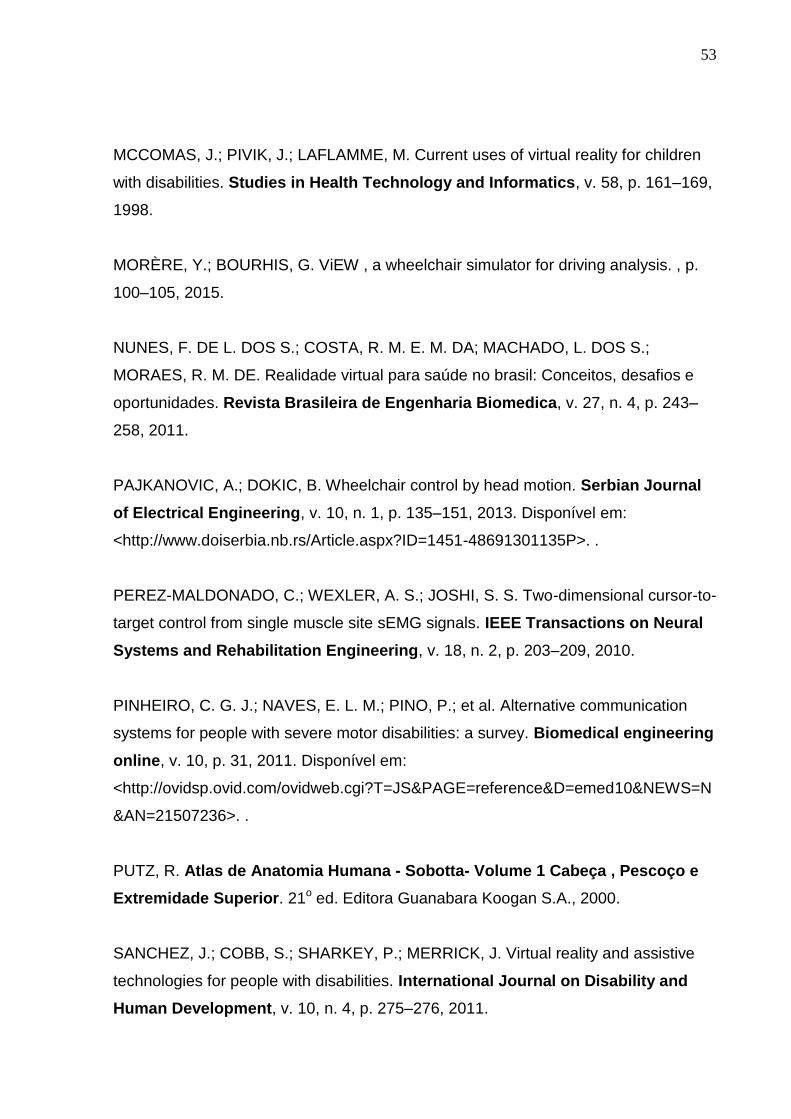
53
MCCOMAS, J.; PIVIK, J.; LAFLAMME, M. Current uses of virtual reality for children
with disabilities. Studies in Health Technology and Informatics, v. 58, p. 161–169,
1998.
MORÈRE, Y.; BOURHIS, G. ViEW , a wheelchair simulator for driving analysis. , p.
100–105, 2015.
NUNES, F. DE L. DOS S.; COSTA, R. M. E. M. DA; MACHADO, L. DOS S.;
MORAES, R. M. DE. Realidade virtual para saúde no brasil: Conceitos, desafios e
oportunidades. Revista Brasileira de Engenharia Biomedica, v. 27, n. 4, p. 243–
258, 2011.
PAJKANOVIC, A.; DOKIC, B. Wheelchair control by head motion. Serbian Journal
of Electrical Engineering, v. 10, n. 1, p. 135–151, 2013. Disponível em:
<http://www.doiserbia.nb.rs/Article.aspx?ID=1451-48691301135P>. .
PEREZ-MALDONADO, C.; WEXLER, A. S.; JOSHI, S. S. Two-dimensional cursor-to-
target control from single muscle site sEMG signals. IEEE Transactions on Neural
Systems and Rehabilitation Engineering, v. 18, n. 2, p. 203–209, 2010.
PINHEIRO, C. G. J.; NAVES, E. L. M.; PINO, P.; et al. Alternative communication
systems for people with severe motor disabilities: a survey. Biomedical engineering
online, v. 10, p. 31, 2011. Disponível em:
<http://ovidsp.ovid.com/ovidweb.cgi?T=JS&PAGE=reference&D=emed10&NEWS=N
&AN=21507236>. .
PUTZ, R. Atlas de Anatomia Humana - Sobotta- Volume 1 Cabeça , Pescoço e
Extremidade Superior. 21o ed. Editora Guanabara Koogan S.A., 2000.
SANCHEZ, J.; COBB, S.; SHARKEY, P.; MERRICK, J. Virtual reality and assistive
technologies for people with disabilities. International Journal on Disability and
Human Development, v. 10, n. 4, p. 275–276, 2011.
54
SILVA, A. N.; MORERE, Y.; NAVES, E. L. M.; SA, A. A. R. DE; SOARES, A. B.
Virtual electric wheelchair controlled by electromyographic signals. ISSNIP
Biosignals and Biorobotics Conference, BRC, p. 1–5, 2013.
TECHNOLOGIES, A. Myoware datasheet. , 2015. Disponível em:
<https://github.com/AdvancerTechnologies/MyoWare_MuscleSensor/raw/master/Doc
uments/AT-04-001.pdf>. .
WHO. World Report. World report on disability, , n. WHO/NMH/VIP/11.01, p. 1–23,
2011. Disponível em: <www.who.int>. .