controlo tolerante a falhas baseado em estratégias de ... · controle tolerante a falhas baseado...
TRANSCRIPT

Controlo Tolerante a Falhas baseado em Estratégias de Modelo
Preditivo como Ferramenta para Melhoramento de Sistemas
Flexíveis de Distribuição de Água em Canais de Distribuição de Água
Pedro Simacek
Dissertação para obtenção do Grau de Mestre em
Engenharia Mecânica
Orientadores: Prof. Miguel Afonso Dias de Ayala Botto
Prof. João Miguel Lemos Chasqueira Nabais
Júri
Presidente: Prof. João Rogério Caldas Pinto
Orientador: Prof. João Miguel Lemos Chasqueira Nabais
Vogal: Prof. Duarte Pedro Mata de Oliveira Valério
Novembro de 2014

Agradecimentos
A todos que ajudaram e conspiraram a favor deste trabalho,
Que apoiaram mais que os copos de café às piscadas de olhos,
Aos professores Miguel e João pelo suporte e oportunidade,
À Associação dos Beneficiários do Mira por todos os dados e preocupações,
À minha noiva, pelo apoio, amor e conhecimentos,
Aos meus pais, a quem devo tudo isso e mais.

Controle Tolerante a Falhas baseado em Estratégias de Modelo
Preditivo como Ferramenta para Melhoramento de Sistemas Flexíveis
de Distribuição de Água em Canais de Distribuição de Água
Abstract:
Control systems are increasingly embedded in new projects and renewals of water transport systems. Developed
under the Orchestra Project (PTDC/EMS-CRO/2042/2012), sponsored by Fundação para a Ciência e Tecnologia
(FCT), this work aims to create a benchmark for the improvement of several existing distribution water canal
control architectures. By working in a virtual environment, using the Vila Nova de Milfontes’ Irrigation Canal as
a base, two of the most widespread control architectures were design and, after a series of graphical and
numerical comparisons between different controllers, it was possible to develop a series of scenarios and
performance indicators for the evaluation of the developed controllers, as well as the determination of the action
zone limitation of the controllers. Therefore, it was possible to determine, for a given system, the best control
architecture to be implemented. The study shows that the created benchmark is in accordance with the
expectations, enabling a better choice of controllers for such systems.
Key-words: Classic Control, Faults Detection and Isolation, Fault Tolerant Control, Benchmark, Irrigation Canal,
Water Delivery Systems.
Resumo:
O Controle de Sistemas está cada vez mais incluído em novos projetos e renovações de sistemas de transporte
de água. Inserido no Projeto Orchestra (PTDC/EMS-CRO/2042/2012), patrocinado pela Fundação para a Ciência
e a Tecnologia (FTC), este trabalho visa a criação de um benchmark para o aprimoramento das diversas
arquiteturas de controle existentes para serem implementadas. Trabalhando-se em um ambiente virtual, usando
o Canal de Rega de Vila Nova de Milfontes como base, projetou-se as duas das arquiteturas de controle mais
difundidas para tais sistemas e, com isso, após uma série de comparações gráficas e numéricas entre os
controladores, foi possível desenvolver um conjunto de cenários e indicadores de desempenho para a avaliação
dos controladores desenvolvidos, bem como delimitou-se a zona de ação dos controladores, sendo então
possível determinar, para um dado sistema, a melhor arquitetura de controle a ser implementada. O estudo
mostra que o benchmark criado está de acordo com o esperado, possibilitando uma melhor escolha de
controladores para sistemas citados.
Palavras-chave: Controle Clássico, Detecção e Isolação de Falhas, Controle Tolerante a Falhas, Benchmark,
Canal de Rega, Sistemas de Transporte de Água.

I
Índice
1. Introdução ....................................................................................................... 1
1.1. Motivações .............................................................................................................................. 2
1.2. Revisão Literária ...................................................................................................................... 2
1.3. Contributo da Tese .................................................................................................................. 3
1.4. Descrição sumária da tese ....................................................................................................... 3
2. Sistemas de transporte de água ....................................................................... 5
2.1. Objetivos e desafios nos sistemas de controle de água .......................................................... 5
2.2. Modelação de sistemas de transporte de água ...................................................................... 6
2.3. Arquiteturas usuais de controle de sistemas de transporte de água ..................................... 7
2.3.1. Controle Local a Jusante (CLJ) ......................................................................................... 7
2.3.2. Controle Distante a Montante (CDM) ............................................................................. 8
2.4. Os controladores ..................................................................................................................... 9
2.5. Descrição de falhas ................................................................................................................ 10
3. Infraestrutura do canal gerido pela ABM ....................................................... 12
3.1. Descrição do Sistema ............................................................................................................ 12
3.1.1. Equipamento ................................................................................................................. 13
3.1.2. Procedimentos usuais na exploração da infraestrutura ............................................... 14
3.2. Descrição do Simulador ......................................................................................................... 15
3.2.1. Simplificações e Modificações ....................................................................................... 16
3.2.2. Utilização ....................................................................................................................... 18
4. Modelação e Controle.................................................................................... 19
4.1. Definição das Funções de Transferência ............................................................................... 19
4.1.1. Modelo Analítico ........................................................................................................... 19
4.1.2. Identificação do Sistema ............................................................................................... 21
4.1.3. Comparação entre os Modelos ..................................................................................... 22
4.2. Ajuste de Ganho das Funções ............................................................................................... 23

II
4.3. Sintonização dos Controladores PI ........................................................................................ 24
4.3.1. Anti-Wind Up ................................................................................................................. 25
4.3.2. CLJ .................................................................................................................................. 26
4.3.3. CDM ............................................................................................................................... 29
5. Resultados de Simulação................................................................................ 32
5.1. Descrição dos indicadores de desempenho .......................................................................... 32
5.1.1. Desvio do nível de referência ........................................................................................ 32
5.1.2. Desvio do consumo de água .......................................................................................... 33
5.1.3. Energia consumida ........................................................................................................ 34
5.2. Criação de testes padrões para avaliações das arquiteturas ................................................ 34
5.2.1. Tabela de Atrasos .......................................................................................................... 35
5.2.2. Cenários de extração ..................................................................................................... 36
5.3. Desempenho das arquiteturas .............................................................................................. 42
5.3.1. Desvio do consumo de água .......................................................................................... 42
5.3.2. Energia Consumida ........................................................................................................ 43
5.3.3. Desvio do nível de referência ........................................................................................ 45
5.3.4. Comparação entre os modelos ..................................................................................... 52
5.4. Análise do sistema perante a presença de falhas ................................................................. 53
6. Conclusões ..................................................................................................... 57
7. Bibliografia ..................................................................................................... 59

III
Índice de Figuras
Figura 1: Corte Transversal de um canal genérico. Adaptado de Litrico et. al. (2003). .......................... 6
Figura 2: Estrutura de controle CLJ ......................................................................................................... 7
Figura 3: Estrutura de controle CDM....................................................................................................... 8
Figura 4: Aspecto Geral do Controlador ................................................................................................ 10
Figura 5: Esquema Geral da Rede de Canais geridos pela ABM ............................................................ 12
Figura 6: Detalhe das comportas – (A) Comportas Controláveis dos Distribuidores – (B) Comportas do
Canal Principal – (C) Detalhe do escoamento lateral de água nas comportas principais ..................... 14
Figura 7: Aspecto Geral do Simulador ................................................................................................... 15
Figura 8: Gráfico da distribuição das tomadas de água nos quatro primeiros trechos do canal .......... 16
Figura 9: Gráficos das distribuições das tomadas de água implementadas no simulador ................... 16
Figura 10: Representação do segundo trecho do simulador dividido em setores................................ 17
Figura 11: Ensaios do Simulador e definições do modelo IDZ .............................................................. 20
Figura 12:Resposta à variação de caudal na entrada ............................................................................ 21
Figura 13: Resposta à variação de caudal de saída ............................................................................... 21
Figura 14:Níveis de água a jusante do primeiro teste de CLJ ................................................................ 27
Figura 15:Caudais das comportas e de entrada do primeiro teste de CLJ ............................................ 28
Figura 16:Elevação das Comportas do primeiro teste de CLJ ............................................................... 28
Figura 17:Níveis de água do primeiro teste de CDM ............................................................................ 30
Figura 18: Caudais das comportas e de entrada do primeiro teste CDM ............................................. 31
Figura 19: Elevação das comportas no primeiro teste de CDM ............................................................ 31
Figura 20: Linha do tempo de eventos do cenário SP ........................................................................... 36
Figura 21: Níveis de água a jusante de cada piscina do CDM no cenário SP ........................................ 37
Figura 22: Elevação das comportas do CDM no cenário SP .................................................................. 37
Figura 23: Caudais de admissão e nas comportas do CDM no cenário SP ............................................ 37
Figura 24: Linha do tempo de eventos do cenário SS ........................................................................... 38
Figura 25:Níveis de água a jusante de cada piscina do CDM no cenário SS .......................................... 38
Figura 26:Elevação das comportas do CDM no cenário SS ................................................................... 38
Figura 27:Caudais de admissão e nas comportas do CDM no cenário SS ............................................. 39
Figura 28:Linha do tempo de eventos do cenário EP ............................................................................ 39
Figura 29:Níveis de água a jusante de cada piscina do CDM no cenário EP ......................................... 39
Figura 30: Elevação das comportas do CDM no cenário EP .................................................................. 40
Figura 31:Caudais de admissão e nas comportas do CDM no cenário EP............................................. 40

IV
Figura 32:Linha do Tempo de eventos do cenário ES ........................................................................... 40
Figura 33:Níveis de água a jusante de cada piscina do CDM no cenário ES ......................................... 41
Figura 34: Elevação das comportas do CDM no cenário ES .................................................................. 41
Figura 35:Caudais de admissão e das comportas do CDM no cenário ES ............................................. 42
Figura 36: Indicador de desvio do consumo de água para a arquitectura CLJ ...................................... 42
Figura 37: Indicador de desvio do consumo de água para a arquitectura CDM ................................... 43
Figura 38: Indicador de consumo de energia para a arquitectura CLJ .................................................. 44
Figura 39: Indicador de consumo de energia para a arquitectura CDM ............................................... 44
Figura 40: Gráficos dos indicadores de desvio dos níveis do CLJ para a piscina 1 ................................ 45
Figura 41: Gráficos dos indicadores de desvio dos níveis do CLJ para a piscina 2 ................................ 46
Figura 42:Gráficos dos indicadores de desvio dos níveis do CLJ para a piscina 3 ................................. 46
Figura 43:Gráficos dos indicadores de desvio dos níveis do CLJ para a piscina 4 ................................. 46
Figura 44:Teste no cenário EP com amplitude -1 do CLJ....................................................................... 47
Figura 45:Teste no cenário SS com amplitude -1 do CLJ ....................................................................... 48
Figura 46: Teste no cenário ES com amplitude -1 do CLJ ...................................................................... 48
Figura 47: Gráficos dos indicadores de desvio dos níveis do CDM para a piscina 1 ............................. 49
Figura 48:Gráficos dos indicadores de desvio dos níveis do CDM para a piscina 2 .............................. 49
Figura 49:Gráficos dos indicadores de desvio dos níveis do CDM para a piscina 3 .............................. 50
Figura 50: Gráficos dos indicadores de desvio dos níveis do CDM para a piscina 4 ............................. 50
Figura 51: Teste no cenário SP com amplitude 1 do CDM .................................................................... 51
Figura 52: Detalhe do momento onde ocorre a saturação das saídas do CDM. ................................... 52
Figura 53:Teste com falha de comporta no cenário SS, amplitude 0,75 do CLJ ................................... 53
Figura 54:Teste com falha de comporta no cenário SS, amplitude 0,75 do CDM ................................ 54
Figura 55: Teste com falha de comporta no cenário SS, amplitude -0,75 do CDM .............................. 55
Figura 56:Teste com falha nas extrações no cenário SS, amplitude 1 do CLJ ....................................... 56

V
Índice de Tabelas
Tabela 1: Propriedades dos Troços do Canal de Milfontes ................................................................... 13
Tabela 2: Dados da extração de água nos trechos entre comportas .................................................... 13
Tabela 3: Parâmetros das Funções de Transferência pelo método IDZ ................................................ 20
Tabela 4:Parâmetros das Funções de Transferência pelo método IDZ em tempo Discreto ................. 20
Tabela 5: Parâmetros das Funções de Transferência pelo método de Identificação de Sistemas ....... 22
Tabela 6: Desvio Relativo entre os modelos ......................................................................................... 22
Tabela 7:Ganhos estáticos das comportas ............................................................................................ 24
Tabela 8: Parâmetros das funções de transferência finais ................................................................... 24
Tabela 9: Constantes dos controladores CLJ ......................................................................................... 27
Tabela 10: Constantes dos controladores CDM .................................................................................... 30
Tabela 11:Atrasos a montante e a jusante das tomadas de água em cada piscina .............................. 35
Tabela 12: Desvio máximo dos níveis obtidos nos testes do CDM em relação aos valores de referência
............................................................................................................................................................... 51
Tabela 13: Indicadores de desempenho para testes com falhas na comporta .................................... 54
Tabela 14: Comparação dos indicadores para os testes com falhas da comporta ............................... 55
Tabela 15: Indicadores de desempenho para testes com falhas de extração ...................................... 56

VI
Tabela de Siglas
IDZ Integrator Delay Zero
ARX Autoregressive with Exogenous Inputs
CLJ Controle Local a Jusante
CDM Controle Distante a Montante
ABM Associação de Beneficiários do Mira
FCT Fundação para a Ciência e a Tecnologia

1
1. Introdução
A água sempre é elencada como um dos componentes essenciais para a vida. Além da importância na
satisfação das necessidades corporais, os recursos hídricos são de grande valia para a humanidade, seja no auxílio
higiênico, nos processos alimentícios ou náuticos.
Um dos principais usos da água, desde o surgimento das primeiras civilizações, foi para a agricultura. Desde
a Mesopotâmia, as grandes civilizações vêm-se apropriando dos recursos hídricos naturais para suprir a produção
de alimentos e abastecimento de água para o povo, principalmente, e posteriormente desenvolver o
saneamento básico.
Por considerável tempo, a utilização da água tanto para consumo como para despejo de dejetos ocorria de
forma inconsequente. Foi ao desvencilhar, ou considerar meios de tratamento, das questões sanitárias dos
corpos de água, que o processo do uso da água para consumo em seu estado natural apresentou soluções de
transporte eficazes, possibilitando seu uso mesmo por populações distante de fontes naturais ou ainda com
escassez desse vital elemento.
A canalização da água foi uma das vias de grande importância para o surgimento das grandes cidades.
Contudo, com o êxodo rural causado pela industrialização em meados dos séculos XIX e XX, os processos agrícolas
de pequeno porte acabaram por dar lugar aos grandes latifúndios, o que culminou em uma necessidade hídrica
diferente às existentes nesta época.
Com isso houve o surgimento da demanda por água em localidades onde não havia fácil acesso, e o seu
transporte foi um dos grandes desafios para o contexto hídrico, pois a tecnologia e conhecimento neste ramo,
até então, não havia passado por grandes avanços do que era utilizado pelo povo Romano em seus milenares
aquedutos.
A construção de canais de irrigação no início do século XX disseminou-se pelas diferentes regiões de inúmeros
países, em diversos continentes – cada qual com suas diferenciações técnicas e tecnológicas – fazendo com que
o mapa hidrográfico de cada país sofresse consideráveis alterações. E esse feito deu-se, principalmente, para dar
vazão às necessidades dos latifundiários.
Inicialmente os canais de condução de água eram feitos de modo rústico. Na atualidade, os corpos de água
artificiais carregam tecnologias de ponta e incentivam cada vez mais pesquisas e investimentos nas áreas
hídricas. Sendo esse um ramo que, de início, era restrito aos poucos campos da engenharia, como a civil, hoje
engloba quase todos os ramos da engenharia.
Na engenharia mecânica, principalmente no que diz respeito à área voltada ao controle de sistemas, pode-
se destacar grande inovação sobre os processos de transporte de água, criando uma nova visão do que antes era
tido como um problema de origem civil. Hoje, cada canal passa por um rigoroso processo de personalização, com
a finalidade de se instaurar uma solução ótima ao local. Esse processo considera desde a complexidade dos

2
sistemas a serem implementados até as suas mais diversas peculiaridades, a considerar como base os
levantamentos socioeconômicos e ambientais que cada sistema precisa.
Visando estabelecer novas ferramentas de otimização mecânica para os sistemas de rega, o trabalho
desenvolvido nesta tese baseia-se no controle da ação das comportas do canal de Vila Nova de Milfontes, no
Alentejo Português, com a finalidade de explorar o melhor aproveitamento hídrico do mesmo, em uma série de
testes realizados em ambiente virtual.
1.1. Motivações
Os canais de rega em funcionamento no mundo hoje são, em suma, oriundos de décadas passadas, onde os
processos computacionais automatizados ainda não eram difundidos ao uso em qualquer projeto a ser realizado,
o que coloca grande parte dos canais de irrigação atuais em defasagem tecnológica com o que está disponível
no mercado.
Além disso, é de senso comum, atualmente, que a água não é um recurso renovável, sendo a mesma um
elemento impossível de ser reposto em caso de escassez. As questões ambientais abriram uma nova mentalidade
para seu consumo, sendo o desperdício uma falta grave em qualquer uso que se dá a água.
O projeto Orchestra, realizado em conjunto com as equipas de investigação do IDMEC-IST, NuHCC-Évora,
INESC-ID, ISR, ABM e patrocinado pela Fundação para a Ciência e Tecnologia, propõe o estudo, suporte,
aprimoramento, renovação e desenvolvimento de tecnologias para diversos canais de rega em Portugal.
Esta dissertação inseriu-se no projeto Orchestra com a finalidade de estudar, em um ambiente virtual
previamente elaborado, possíveis mudanças na arquitetura das comportas e do sistema de controle das mesmas
no Canal de Vila Nova de Milfontes, gerenciado pela Associação dos Beneficiários do Mira (ABM), com a
finalidade de promover um melhor gerenciamento dos recursos hídricos do canal, evitando desperdícios tanto
nas condições normais de operação quanto em casos de falhas do sistema.
1.2. Revisão Literária
O projeto baseia-se em ambientes de MatLab e Simulink, principalmente no simulador desenvolvido no
âmbito do referido Projeto Orchestra.
Inicialmente, para o desenvolvimento dos controladores deste estudo, definiu-se o sistema físico por detrás
do canal, seguindo o trabalho proposto por Nabais et. al. (2011), que fornece o modelamento utilizado pelo
simulador bem como noções gerais do modelamento de canais, e Litrico e Fromion (2004), com a proposta do
modelo IDZ, considerado um meio mais simples e preciso de modelar o sistema.

3
Como ponto de partida para a definição dos controladores, foram estudados os trabalhos de Litrico et. Al.
(2003) e Ooi e Weyer (2008), ambos trabalhos fundados nas premissas do controle clássica que serviram como
inspiração e fundamentação para os controladores elaborados, bem como, de modo mais específico, o trabalho
de Bohn e Atherton (1998), Ghoshal e John (2010) e Li, Park e Shin (2007), todos tratando sobre métodos de
como trabalhar com a saturação do controlador, melhorando sua performance.
Após a definição dos controladores, o estudo de Nabais, Mendonça e Botto (2013) foi inspiração para o
entendimento e aplicação de possíveis falhas no sistema.
Além disso, consultou-se o sitio da MathWorks para avaliação de funcionalidades e opções de funções para
o melhor uso das ferramentas de MatLab e Simulink.
1.3. Contributo da Tese
Visando um melhor aproveitamento hídrico de canais de rega, o trabalho inspira-se no Canal de Vila Nova de
Milfontes para criar uma metodologia de controle de comportas almejando o menor desperdício de água
possível, bem como o estabelecimento dos limites de atuação em cada cenário provável que um canal poderia
enfrentar.
O trabalho realizado, contribuindo da forma prevista, oferece uma alternativa para o planejamento de futuras
modificações no sistema de controle e nas comportas para o Canal de Rega de Vila Nova de Milfontes. O
desenvolvimento das arquiteturas de Controle Distante a Montante (CDM) e Controle Local a Jusante (CLJ) e a
comparação dos seus desempenhos corrobora com um posicionamento sobre as vantagens e desvantagens
destas arquiteturas, bem como com a criação de um benchmark para futuros testes de eficiência destes sistemas.
1.4. Descrição sumária da tese
O objetivo deste estudo foi a comparação das metodologias clássicas de controle de sistemas flexíveis de
entrega de água em canais de rega, sendo desenvolvidos, testados e ambientados no simulador em Simulink do
Canal de Milfontes, afim de criar um benchmark para novos modelamentos.
Para alcançar tal objetivo, o estudo dos sistemas hídricos envolvidos foi de vital importância. Primeiramente,
houve o estudo das leis que se baseou o simulador (foco deste estudo), bem como, em continuação, a definição
das funções de transferência do próprio simulador. Para tal, duas metodologias distintas foram usadas: um modo
teórico, inspirado na teoria proposta por Litrico e Fromion (2004), e um modo mais prático, fazendo a
identificação do sistema por via de testes realizados no simulador.

4
Com a definição desses parâmetros, obtendo-se uma função de transferência para cada trecho do canal,
houve a fase de definição dos diversos controladores e suas propriedades. Após definidas as especificações de
cada controlador (margem de ganho e fase), os mesmos foram sincronizados utilizando as ferramentas
disponíveis nas bibliotecas do MatLab.
Por fim, estabeleceu-se uma tabela de atrasos, que fornece dentro desse âmbito, os espaçamentos entre a
abertura de uma tomada de água e a percepção desta perturbação nas comportas – a montante e a jusante da
referida tomada. Tal tabela proporcionou a criação dos testes padrões que os diversos modelos foram
submetidos, a fim de comparar sua eficácia bem como seus limites de ação, criando, assim, o benchmark.
Os testes foram realizados, cada método de controle foi avaliado e comparado, bem como preparado para
uma repetição. Na sequência foram submetidos aos mesmos avaliadores em situações onde houvessem falhas
diversas no sistema.
Com isso, pode-se comprovar a eficácia dos controladores na hipótese inicial de se controlar sistemas de
demanda flexível de água, de um modo sem desperdícios e com baixo consumo energético, mesmo sobre ações
adversas e imprevisíveis no sistema.
Este documento encontra-se dividido em seis capítulos, a saber:
• Capítulo 1: Apresenta-se uma visão geral do trabalho e sua contextualização.
• Capítulo 2: Define-se as premissas que envolvem os sistemas de transporte de água, bem como os
controladores utilizados no trabalho.
• Capítulo 3: Apresentação do Canal de Vila Nova de Milfontes e o Simulador utilizado para a
realização dos testes.
• Capítulo 4: Expõe os resultados obtidos pela sintonização dos controladores, bem como o processo
de obtenção destes.
• Capítulo 5: Destina-se à explicação dos cenários criados aos quais as arquiteturas de controle
desenvolvidas foram submetidas, bem como os indicadores que avaliaram o desempenho destas.
Os resultados dos testes também são mostrados nesta parte.
• Capítulo 6: Conclusão do trabalho e considerações finais.

5
2. Sistemas de transporte de água
Sistemas de transporte de água podem ser divididos em dois grupos: os canais abertos e os canais fechados.
Os canais fechados, tais quais os sistemas de serviços de água para uma cidade, transportam-na por meio de
dutos fechados, com pressão variável e, assim, com maior controle dos parâmetros do escoamento. No caso de
estudo, o Canal de Vila Nova de Milfontes é aberto, onde a superfície da água está exposta ao ambiente, sendo,
então, o escoamento do fluido regido pelas equações de Saint-Venant e pelas propriedades geométricas e
hidráulicas do canal.
2.1. Objetivos e desafios nos sistemas de controle de água
Para um eficiente controle de corpos de água, tem-se por parâmetros a sua capacidade de atender a
demanda dos consumidores, bem como a preservação ambiental. Atender a demanda inclui não apenas a
manutenção das águas para as saídas padrões, definidas no projeto inicial do canal, bem como as possíveis falhas
na qual o canal estará sujeito com o passar do tempo. No âmbito ambiental, a eficiência do controle depende do
mínimo desperdício de água, fazendo assim o seu uso consciente.
O método mais utilizado para cumprir com os objetivos do controle hídrico é fixando-se valores de referências
aos níveis de água a jusante do canal, os quais seriam a ponderação adequada para atender a demanda sem que
haja o desperdício da água acumulada no sistema. Além disso, nota-se que nesta ponderação encaixa-se o
desprendimento de energia envolvido no controle do sistema, que também deve, idealmente, ser minimizado.
Porém, dependendo da geometria do canal e dos limites de segurança encontrados, algumas simplificações
podem causar inconvenientes na modelação matemática do problema. Obter o modelo com base nas equações
de Saint-Venant requer aproximações da realidade, e isso torna-se um desafio para canais onde haja áreas de
represamento da água, dada a não-linearidade destes fenômenos.
A geometria do canal também pode tornar a sintonização dos controladores um desafio, dado que o atraso
relativo entre a descarga de caudal a montante e a chegada das águas aos pontos distantes deste é diretamente
proporcional ao comprimento do canal.
Por fim, a separação física do canal por comportas também cria um cenário dificultoso ao controle, pois a
ação de cada segmento do canal acarreta perturbações tanto nas piscinas a montante quanto a jusante.

6
2.2. Modelação de sistemas de transporte de água
Dado um trecho de um canal genérico, temos o corte transversal exemplificado na Figura 1.
Definimos y(x,t) como a variação do nível no ponto x em relação ao seu valor de referência nas condições de
funcionamento, bem como q(x,t) como a variação do caudal no ponto x em relação ao caudal nominal daquele
ponto. Portanto, pensando no controle dos níveis nas extremidades do canal, temos:
���0, �����, �� = � �� �� �� ��� ���0, �����, �� = � �� �� �� ��� ������ = � � (1)
Onde a matriz P representa a matriz das funções de transferência cujas variáveis de entrada são as variações
dos caudais nas extremidades do canal.
Portanto, o modelamento do canal dá-se na definição de cada membro da matriz P, o que pode ocorrer por
métodos analíticos, como base em simplificações das equações de Saint-Venant, ou de modo empírico, como
por métodos de identificação de sistemas.
Exemplos desses métodos são o modelo Integrator Delay Zero (IDZ), proposto por Litrico em Simplified
Modeling of Irrigation Canals for Controller Design, Journal of Irrigation and Drainage Engineering (2004).
Para os modelos a criados neste estudo, as funções de transferência da matriz P, aproximadas a partir das
funções de Saint-Venant, serão funções de primeiro grau com atraso, seguindo a fórmula a seguir:
�� = ����� � ���� (2)
Onde os atrasos �� são considerados nulos para os membros da diagonal principal da matriz P, enquanto !� são os respectivos ganhos das funções.
Figura 1: Corte Transversal de um canal genérico. Adaptado de Litrico et. al. (2003).

7
2.3. Arquiteturas usuais de controle de sistemas de transporte de água
Para o devido funcionamento de um sistema de transporte de água deve-se considerar que, ao realizar-se
uma extração em qualquer ponto deste, existirá água para suprir a demanda pedida naquela zona que sofreu a
retirada, bem como a garantia que as tomadas de água a jusante deste ponto irão sofrer escassez.
Tendo essa afirmação como base, garantir a existência de água a jusante em um trecho entre comportas e
assegurar também o caudal de continuidade para o próximo trecho, é suficiente para sustentar o funcionamento
do canal.
Sendo assim, as arquiteturas usuais para o controle destes sistemas baseiam-se na regulação do nível a
jusante de cada trecho entre comportas de um dado canal, sendo possível regulá-lo utilizando qualquer uma das
comportas que o limitam.
2.3.1. Controle Local a Jusante (CLJ)
Esta arquitetura de controle visa controlar o nível de água a jusante de uma piscina do canal tendo como a
variável controlada a abertura da comporta local, ou seja, da comporta a jusante da piscina.
A Figura 2 exemplifica visualmente a estrutura de controle.
Figura 2: Estrutura de controle CLJ
Nesta arquitetura, os controladores agem de forma independente, sem que haja comunicação entre cada um
deles.

8
Contudo, o sistema de controle previsto não controla a admissão de água no canal, o que poderia ocasionar
problemas caso houvessem variações nas extrações ao longo do canal. Tendo em conta que tais variações são
demandas dos usuários do canal e que, de acordo com a ABM, tais pedidos devem ser feitos com, no mínimo,
um dia de antecedência. A central sempre terá o perfil de extrações de água com 24 horas de antecedência, ou
seja, haverá a realização da variação do caudal de entrada manualmente com base neste perfil.
Tal variação do caudal de entrada dá-se diferentemente em cada piscina. Sabendo-se os tempos de atraso
entre a admissão de água e a sua efetiva chegada à jusante de cada piscina, cria-se o perfil desse caudal ao longo
do dia, afim de anular as variâncias das extrações com vistas a minimizar a influência delas nos níveis do canal.
Para essa arquitetura, espera-se uma resposta mais rápida e precisa do sistema, dado que não há atrasos
entre a tomada de ação dos controladores e a sua influência.
Porém, dado que os controladores não se comunicam, pode ocorrer o que é relatado como um
comportamento “egoísta” dos controladores onde, com uma dada ação extrema de um controlador, pode
acarretar a escassez ou a inundação da piscina a jusante dele.
2.3.2. Controle Distante a Montante (CDM)
O Controle Distante a Montante é uma arquitetura de controle onde se controla o nível a jusante de uma
dada piscina manipulando o caudal de admissão daquela piscina. A estrutura de controle é evidenciada na Figura
3.
Nesta arquitetura, com base no nível e a referência deste a jusante de uma piscina, atua-se na comporta a
montante. Nota-se, também, a ação Feedfoward no sistema, integrando os controladores. Tal ação mostra-se
Figura 3: Estrutura de controle CDM

9
necessária para diminuir os efeitos de acoplamento entre as piscinas, que são significativos para esta arquitetura
de controle.
O efeito de acoplamento entre as piscinas mostra-se mais forte neste caso, pois os tempos de atraso entre a
ação de uma comporta e a influência desta nos níveis próximos a montante e nível distantes a jusante são muito
díspares. Ao realizar uma ação, o nível a montante da comporta percebe a influência imediatamente, porém,
como é de responsabilidade da comporta anterior regulá-lo, nota-se uma certa propagação das perturbações no
contra fluxo do canal, assim justificando-se a necessidade da ação do Feedfoward no sistema.
Um diferencial nesta arquitetura é que não há a necessidade de criação do perfil de extração de água nem
do perfil de admissão de água no canal, dado que a admissão de água é uma variável controlada pelo sistema. A
princípio, tal propriedade impede que haja escassez de água no sistema pois, não se importando as extrações
realizadas, o caudal de admissão do canal poderá suprir a demanda.
2.4. Os controladores
Em todas as arquiteturas implementadas, serão implantados controladores do tipo Proporcional-Integral (PI).
A saída de cada controlador, ou seja, a variação da elevação das comportas, terão valores máximos e mínimos.
A posição da comporta não deve ultrapassar o nível de água a montante dela (ponto de saturação superior) nem
ser menor do que zero (ponto de saturação inferior). Dado isso, a saída de cada controlador deve ser tal que a
elevação total não extravase tais saturações.
Com a saturação do controlador, a resposta do mesmo pode ser comprometida para casos onde o valor do
acumulador integral seja muito alto, o que implica na necessidade da implementação do Anti-Wind Up no
sistema.
O Anti-Wind Up é uma ferramenta utilizada nos controladores para que, em caso de saturação de sua saída,
haja um descarregamento da ação integral do controlador, afim de que a valor de saída do controlador seja igual
ao limite de saturação, impedindo que a ação integral fiquei sobrecarregada. Com isso, qualquer alteração da
variável de entrada do controlador, a resposta deste seria imediata, sem a necessidade de descarregar a ação
integral, dado que isto já foi realizado pela proteção Anti-Wind Up.
Os controladores a serem sintonizados têm as mesmas características em ambas as arquiteturas a serem
apresentadas, diferenciando apenas seus parâmetros. O modelo implementado em MatLab/Simulink tem o
aspecto representado na Figura 4.

10
A entrada do bloco do controlador é a diferença entre o valor atual do nível de água a jusante e o valor de
referência deste nível da piscina a qual está sendo controlada. Os blocos Mode e Logic representam variáveis
computacionais, que permitem a permuta da arquitetura do controlador.
Os ganhos Kp e Ki representam, respectivamente, os valores dos ganhos proporcional e integral do
controlador, bem como os ganhos Feed e Klim representam os ganhos de Feedfoward e do Anti-Wind Up.
Apesar da ação de Feedfoward estar implementada de modo uno para ambas as arquiteturas, o CLJ não se
aproveitará desse recurso, dado que o ganho Feed terá valor nulo neste caso. Como previsto no caso CDM, o
sinal do Feedfoward é o valor da saída do controlador seguinte.
Para a definição dos valores destas constantes, serão definidos os valores da margem de ganho e da margem
de fase para cada arquitetura, bem como avaliados, de modo iterativo, para que sejam encontrados os valores
que melhor respondem às necessidades do sistema. Para tal, será utilizada a ferramenta PID Tuner fornecida
pelo MatLab.
2.5. Descrição de falhas
Em sisteamas de transporte de água, que contam com diversos equipamentos eletromecânicos e atuações
humanas, além de estarem sujeitos a diversos intempéries, existem, substancialmente, três tipos de falhas,
citadas a seguir:
Figura 4: Aspecto Geral do Controlador

11
• Falhas de Sensor de nível
Os sensores de nível ao longo de um canal são vitais para seu funcionamento, principalmente aqueles
localizados nos níveis aos quais se desejam controlar.
Um sensor é susceptível a uma série de fatores internos e externos que podem acarretar em falhas da leitura
dos níveis.
Tais fatores podem estar relacionados desde a sua estrutura eletrônica, como quedas no fornecimento de
energia, bem como fatores ligados ao canal e seu arredor, como, por exemplo, a existência de sedimentos no
leito do canal, que interfeririam em sensores que utilizem a pressão da coluna de água para adquirir os dados do
nível.
Vale notar que este tipo de falha não será estudado neste trabalho.
• Falhas de Atuação
As comportas são a ferramenta chave para o controle do nível em canais e rios. Contudo, tal como os sensores
de nível, as comportas estão sujeitas a uma série de fatores internos e externos que podem alterar o seu
funcionamento.
Por ser um equipamento mais complexo, existem mais variáveis que permitem ocorrer erros e acabar por
fazer o sistema todo entrar em falha.
Sabe-se que erros dos sensores, descontinuidade da rede elétrica e sedimentos no canal podem causar falhas
das comportas mas, além destes, erros nos sensores de posição, sobre tensões e falhas catastróficas da estrutura,
até a falta de manutenção podem acarretar em falhas na atuação das comportas.
• Variações das Extrações de Água
As extrações de águas, por mais que algumas vezes sejam bem quistas e esperadas, podem ser consideradas
falhas no sistema. Quando há extrações que fogem à demanda esperada, o sistema pode não ser capaz de lidar
com isso e, por esse fato, opta-se por classifica-las como falhas.
Tais variações das extrações podem ser entendidas como tomadas de água ilegais pelo canal ou fugas da
estrutura civil por rachaduras, bem como elevados índices de precipitação ao longo do canal.

12
3. Infraestrutura do canal gerido pela ABM
O sistema de canais gerido pela ABM (Associação dos Beneficiários do Mira) fornece água a grandes culturas,
em especial de frutas vermelhas, em uma região que equivale de vital importância econômica para o país.
As duas redes de rega principais
são as relacionadas com o Canal de
Vila Nova de Milfontes e o Canal de
Odeceixe, ambos com a água
proveniente da Barragem de Santa
Clara, sendo ela armazenada, em
primeira instância, no Reservatório de
Odeceixe. O Canal de Milfontes
abastece a região a norte do
reservatório enquanto o Canal de
Odeceixe segue a sul.
O Canal de Milfontes, foco do
estudo, tem seu início no Reservatório
de Milfontes, que é abastecido pelo
Reservatório de Odeceixe pela Central
da Bugalheira, como evidenciado no
esquema geral da rede de canais gerida
pela ABM.
O desnível entre os reservatórios é utilizado pela Central da Bugalheira para aproveitamento hidrelétrico,
sendo que também é da responsabilidade da central o controle e gerenciamento do Canal de Milfontes.
3.1. Descrição do Sistema
O Canal de Vila Nova de Milfontes estende-se por 24 362 metros, contendo 7 comportas para seu controle.
Na concepção do canal, a engenharia civil dividiu-o em 4 troços, sendo o primeiro a parte compreendida a
montante da primeira comporta, o segundo a porção entre a primeira e a segunda comporta, o terceiro
correspondente ao trecho entre a segunda e quarta comporta e o quarto troço a região a jusante da quarta
comporta. As propriedades de cada troço estão listadas na tabela a seguir:
Figura 5: Esquema Geral da Rede de Canais geridos pela ABM

13
Tabela 1: Propriedades dos Troços do Canal de Milfontes
Troço I Troço II Troço III Troço IV
Comprimento 8792,5 4442,1 4796 6331 m
Caudal a Montante 5,698 3,419 2,32 0,639 "#/s
Nível de Água a Jusante 2,07 1,71 1,48 0,91 m
Coeficiente de Manning 0,014 0,014 0,014 0,014 -
Inclinação do rasto 0,0001 0,0001 0,0001 0,0001 -
Secção Trapezoidal Trapezoidal Trapezoidal Trapezoidal -
Largura da Base 1,7 1,4 1,2 0,75 m
Inclinação das espaldas 1/1 1/1 1/1 1/1 -
Dados fornecidos pela ABM
As extrações de água realizadas no canal principal são separadas em três vertentes: Extrações Diretas;
Distribuidores; Regadeiras. As extrações diretas são tomadas de água do consumidor final diretamente ao canal,
as regadeiras são pequenas ramificações do canal por onde a água escoa sem que seja possível controlar o fluxo,
e os distribuidores são ramificações de maior porte (que constam com suas próprias tomadas de água) onde há
o controle de vazão por comportas no canal principal. Os caudais nominais de extração, bem como a distribuição
da extração em cada trecho entre comportas é dada por:
Tabela 2: Dados da extração de água nos trechos entre comportas
Troço 1 Troço 2 Troço 3 Troço 4
Trecho 1 Trecho 2 Trecho 3 Trecho 4 Trecho 5 Trecho 6 Trecho 7
Pontos de Extração 19 15 15 16 6 6 6 -
Caudal Máximo 1110 670 180 1260 80 130 140 l/s
Caudal Mínimo 20 20 20 20 20 20 20 l/s
Porcentagem
das Extrações
feitas por:
Distribuidores 78,4% 48,6% 32,7% 74,1% 0,0% 0,0% 25,6% -
Regadeiras 15,8% 42,3% 41,8% 16,5% 82,6% 83,3% 61,5% -
Tomadas Diretas 5,9% 8,7% 25,5% 9,4% 17,4% 16,7% 12,8% -
Fonte: Nabais (2014)
3.1.1. Equipamento
A sala de controle do canal, situada na Central da Bugalheira, utiliza o software SCADA para gerenciar o
canal. Tal programa permite aos operadores visualizarem dados do canal em tempo real, bem como executar
ordens para as comportas controláveis remotamente.

14
As comportas controláveis, no momento, são as que regulam o fluxo de água entre o canal e os
distribuidores ligados a ele, como exemplificado na Figura 6A.
As comportas principais do canal, exemplificadas na Figura 6B, são do tipo escoamento-afogado, contudo,
devido a sua arquitetura, podemos notar o escoamento lateral de água, como na Figura 6C. A ação de controle
em cada comporta é do tipo proporcional, sendo atuadas de forma autônoma por compensação entre o nível da
água a montante da comporta e pela ação da gravidade nos contrapesos, sendo impossível o controle manual
destas.
Atualmente, algumas comportas principais do canal contam com instrumentação para medição do nível
a montante e a jusante delas, sendo que apenas alguns destes sensores foram renovados nos últimos anos.
3.1.2. Procedimentos usuais na exploração da infraestrutura
O gerenciamento, atualmente, foca-se na demanda de água dos clientes. Os pedidos são oficializados com,
pelo menos, um dia de antecedência, e o pedido registra a quantidade de água e o horário de início da tomada
desta.
Com isso, sabendo de antemão as extrações a serem realizadas, suas intensidades, horários e posições no
canal, é possível regular a quantidade de água localmente, com a abertura antecipada do caudal de admissão do
canal, considerando essa abertura antecipada em relação ao horário de requisição do pedido, baseando-se nos
tempos de atraso do transporte da água da admissão até a tomada de água.
Figura 6: Detalhe das comportas – (A) Comportas Controláveis dos Distribuidores – (B) Comportas do Canal
Principal – (C) Detalhe do escoamento lateral de água nas comportas principais
15
3.2. Descrição do Simulador
O trabalho a ser realizado basear-se-á num ambiente virtual do canal de Vila Nova de Milfontes, desenvolvido
no âmbito do projeto Orchestra, para a obtenção dos resultados necessários. O Simulador visa uma fiel
representação do canal, respeitando as normas as quais o projeto original do canal foi submetido, bem como as
leis físicas envolvidas no processo de transporte da água.
A implementação do Simulador foi feita em Simulink, considerando-se a precisão da ferramenta e a facilidade
de obtenção de dados do modelo.
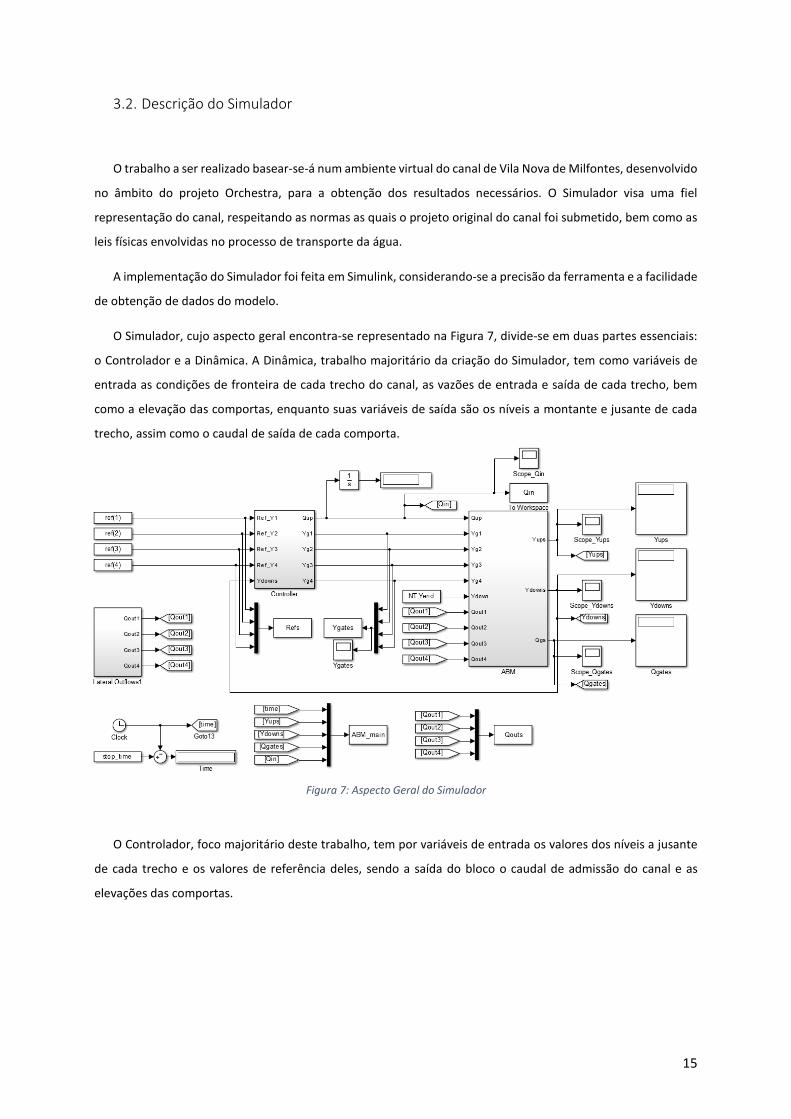
O Simulador, cujo aspecto geral encontra-se representado na Figura 7, divide-se em duas partes essenciais:
o Controlador e a Dinâmica. A Dinâmica, trabalho majoritário da criação do Simulador, tem como variáveis de
entrada as condições de fronteira de cada trecho do canal, as vazões de entrada e saída de cada trecho, bem
como a elevação das comportas, enquanto suas variáveis de saída são os níveis a montante e jusante de cada
trecho, assim como o caudal de saída de cada comporta.
O Controlador, foco majoritário deste trabalho, tem por variáveis de entrada os valores dos níveis a jusante
de cada trecho e os valores de referência deles, sendo a saída do bloco o caudal de admissão do canal e as
elevações das comportas.
Figura 7: Aspecto Geral do Simulador

16
3.2.1. Simplificações e Modificações
Diversas simplificações e modificações foram necessárias para a implementação do Simulador.
Primeiramente, o Simulador compreende apenas os quatro primeiros trechos do canal, já que estes
correspondem a 90% do fluxo de água total do sistema. Outro fato que influenciou na desconsideração dos
demais trechos foi que, logo a montante da quarta comporta, existe uma tomada de água cujo valor do caudal
ultrapassa o valor do caudal a continuar pelo canal, tornando a simulação do restante do canal obsoleta para
obtenção de dados.
Outra simplificação implementada foi em relação as posições das tomadas de água no canal. As extrações em
cada trecho são realizadas de forma distribuída, e não uniforme, por toda a extensão do canal, em 65 locais
distintos, como mostrado na Figura 8, o que tornaria impraticável a implementação real delas em Simulink.
Assim sendo, optou-se por dividir cada trecho em partes de comprimento igual e realizar a extração de cada
fração do trecho a jusante dela. Os trechos foram divididos em 7, 9, 7 e 6 setores, respectivamente do primeiro
trecho ao quarto, totalizando 29 setores. A Figura 9 mostra a nova divisão e os valores das extrações nominais
realizadas em cada setor.
Figura 8: Gráfico da distribuição das tomadas de água nos quatro primeiros trechos do canal
Figura 9: Gráficos das distribuições das tomadas de água implementadas no simulador

17
A Figura 10 exemplifica, de modo
visual, o segundo trecho do canal e seus
9 setores, onde as válvulas representam
as tomadas de água a jusante de cada
setor.
Assim sendo, o canal de Vila Nova de
Milfontes foi reduzido a 29 setores,
sendo que existem três tipos de setores:
os primeiros de cada trecho, cujas
condições de fronteira são o fluxo de
água a montante e o nível a jusante,
chamados de “QY”; os últimos de cada trecho, cujas condições de fronteira são o nível de água a montante e o
fluxo a jusante, chamados de “YQ”; os intermediários de cada trecho, cujas condições de fronteira são os níveis
de água a montante e a jusante, chamados de “YY”. No total, encontramos no simulador quatro setores do tipo
“QY”, quatro do tipo “YQ” e 21 do tipo “YY”.
Nota-se, ainda, a presença de 25 nós de interligação de níveis de água, que ocorrem quando se ligam setores
do tipo YY a qualquer outro, e 3 nós de interligação de caudal, que ocorrem nas entre os trechos, ou seja, quando
se ligam setores do tipo “YQ” aos “QY”.
Além das simplificações das extrações e extensão do canal, também se optou por um modelo mais simples
de comportas. Primeiramente, o efeito de escoamento lateral das comportas foi eliminado, considerando-as
comportas de escoamento afogado do tipo guilhotina, onde o fluxo a passar pela comporta é regido pela
equação:
$ = %& . (). *2,*-. − -0 (3)
Onde:
Q: Caudal de saída da comporta
cd: Coeficiente de descarga da comporta
Ag: Área submersa de passagem do caudal
g: Aceleração da gravidade
Yu: Nível a montante da comporta
Yd: Nível a jusante da comporta
Figura 10: Representação do segundo trecho do simulador dividido em
setores

18
As comportas simuladas portam-se como se controladas eletronicamente, diferente da ação de controle
hidrodinâmica atualmente implementada. Por conta disso, as comportas movimentar-se-iam pela ação de um
atuador e, com isso, sujeitas a saturação da velocidade de abertura e fecho.
3.2.2. Utilização
O funcionamento adequado do simulador depende dos valores numéricos do projeto real do canal, tais quais
suas dimensões, coeficientes e valores no ponto de operação, além dos dados do teste a ser realizado, como os
valores dos controladores e as variáveis de entrada.
Em suma, um script desenvolvido no ambiente do MatLab carrega todas as constantes utilizadas pelo
simulador em sua área de trabalho, assim como auxilia na definição das variáveis de entrada: o tempo de
simulação, a variação do caudal de entrada do canal, a variação das extrações laterais de água e as propriedades
dos controladores. Vale lembrar que todas as condições iniciais do simulador são as condições de funcionamento
estabelecidas no projeto real do Canal de Vila Nova de Milfontes.
Após o término da simulação, basicamente todos os dados gerados pelo simulador podem ser visualizados.
Contudo, os valores que o script principal guarda na memória são as variáveis principais de saída e alguns valores
de entrada, para comparação com os dados iniciais. Tais variáveis são, entre outras: o caudal de entrada, as
extrações laterais de água, os níveis de água pelo canal, as aberturas das comportas e os seus caudais.

19
4. Modelação e Controle
Considerando que as arquiteturas usuais de controle baseiam-se no nível a jusante do canal, temos, a partir
da equação 1:
���, 1� = ����0, 1� + �����, 1� = ���� + ���� (4)
Assim sendo, o primeiro termo da soma representa o CDM e o segundo termo o CLJ, sendo u a variável de
entrada e p a função de transferência, como já supracitado.
A sintonização dos controladores necessita do conhecimento prévio das funções de transferência para cada
arquitetura, sendo, então, necessárias oito funções de transferência, duas para cada trecho entre comportas do
canal, para que então a sintonização dos controladores seja feita de forma mais eficiente.
4.1. Definição das Funções de Transferência
Dois métodos para se definir as funções de transferência foram utilizados no simulador a ser trabalhado, a
fim de se estabelecer um critério de comprovação da real magnitude delas: um baseando-se em dados coletados
pelo simulador e dos estudos em Identificação de Sistemas, que crê-se serem os mais fiéis, dado o menor número
de aproximações e simplificações, um método analítico, formulado por Litrico et. al. (2004), a fim de estabelecer
um parâmetro não-computacional de comparação dos resultados.
4.1.1. Modelo Analítico
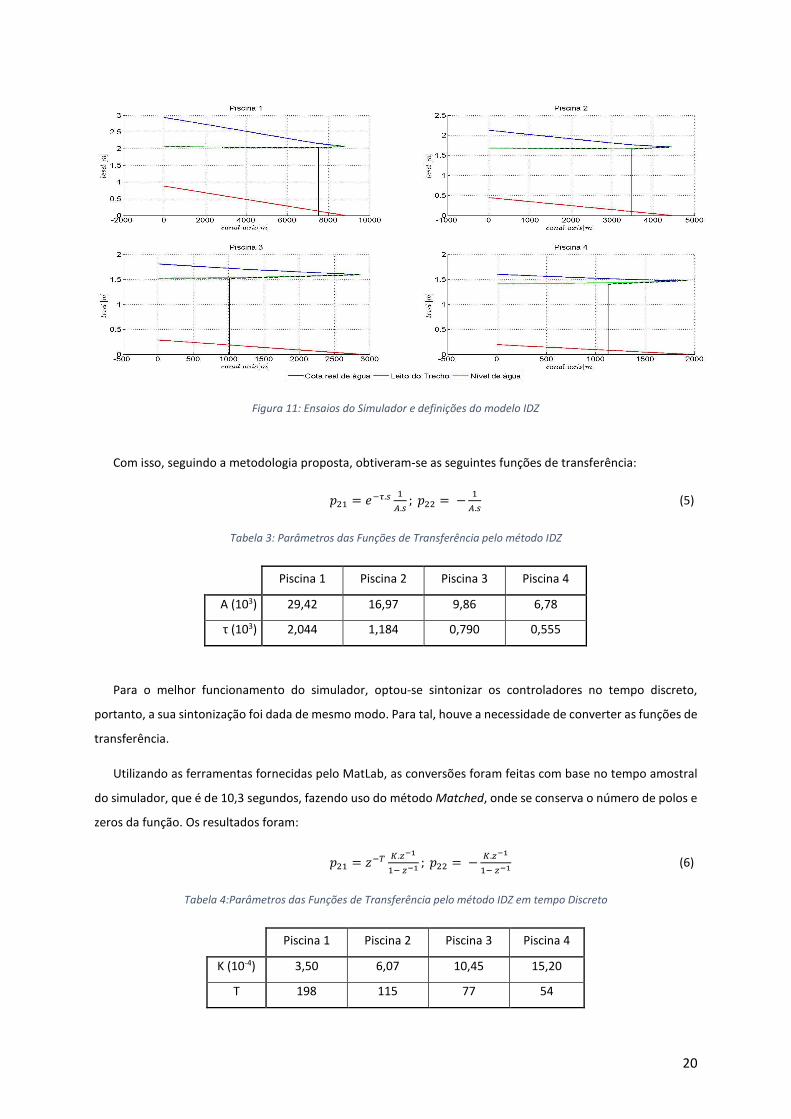
Assim como definido por Litrico et. al. (2004), o método IDZ foi aplicado a uma série de dados obtidos com o
simulador. O ensaio foi realizado nas condições padrões de funcionamento do canal simulado. Primeiramente,
realizou-se a separação de cada trecho do canal, encontrando-se o ponto onde difere o escoamento com nível
de água constante e o escoamento onde há represamento da água, definidos na Figura 11 pelas linhas negras.
20
Com isso, seguindo a metodologia proposta, obtiveram-se as seguintes funções de transferência:
�� = ���.� �3.� ; �� = − �3.� (5)
Tabela 3: Parâmetros das Funções de Transferência pelo método IDZ
Piscina 1 Piscina 2 Piscina 3 Piscina 4
A (103) 29,42 16,97 9,86 6,78
τ (103) 2,044 1,184 0,790 0,555
Para o melhor funcionamento do simulador, optou-se sintonizar os controladores no tempo discreto,
portanto, a sua sintonização foi dada de mesmo modo. Para tal, houve a necessidade de converter as funções de
transferência.
Utilizando as ferramentas fornecidas pelo MatLab, as conversões foram feitas com base no tempo amostral
do simulador, que é de 10,3 segundos, fazendo uso do método Matched, onde se conserva o número de polos e
zeros da função. Os resultados foram:
�� = 5�6 �.789�� 789 ; �� = − �.789
�� 789 (6)
Tabela 4:Parâmetros das Funções de Transferência pelo método IDZ em tempo Discreto
Piscina 1 Piscina 2 Piscina 3 Piscina 4
K (10-4) 3,50 6,07 10,45 15,20
T 198 115 77 54
Figura 11: Ensaios do Simulador e definições do modelo IDZ

21
4.1.2. Identificação do Sistema
O primeiro passo para a definição das funções de transferência pelos princípios da Identificação de Sistema
é obter a série temporal a ser analisada. Dado o acoplamento entre cada piscina do canal, o uso do simulador
completo causaria problemas na leitura dos dados, portanto, criou-se um outro modelo em Simulink onde cada
piscina foi analisada de modo separado.
A série de dados foram obtidas utilizando cada piscina em seu funcionamento normal, fazendo a variação do
caudal de entrada e de saída de cada uma, separadamente. Ao variar o caudal de entrada, pode-se analisar a
função de transferência :;< e, ao variar-se o caudal de saída, a função :;;. A variação dos caudais, em cada
série, foi de 0.3 =>
� , e sua resposta temporal foi analisada pela ferramenta de análise do MatLab (System
Identification Tool).
Para uma simulação de duas horas, as respostas encontram-se nas Figuras 12 e 13.
Com isto, aplicou-se a System Identification Tool, utilizando o método ARX para identificar a função de
transferência de cada série.
Encontrou-se, então, os seguintes resultados, para os casos de variação do caudal de entrada e saída, já em
tempo discreto:
�� = 5�6 �0.789�� 789 ; �� = − �?.789
�� 789 (7)
Figura 12:Resposta à variação de caudal na entrada
Figura 13: Resposta à variação de caudal de saída

22
Tabela 5: Parâmetros das Funções de Transferência pelo método de Identificação de Sistemas
Piscina 1 Piscina 2 Piscina 3 Piscina 4
Kl (10-4) 5,70 8,00 10,28 14,43
Kd (10-4) 3,73 7,63 10,56 14,47
T 204 117 77 55
4.1.3. Comparação entre os Modelos
Para se comparar os modelos, fez-se o desvio relativo de cada ganho obtido pela identificação do sistema em
relação aos dados teóricos do modelo IDZ, apresentados na tabela a seguir.
Tabela 6: Desvio Relativo entre os modelos
Variação em: Piscina 1 Piscina 2 Piscina 3 Piscina 4
Kl 62,74% 31,75% -1,63% -5,07%
Kd 6,63% 25,77% 1,05% -4,80%
T 3,03% 1,74% 0,00% 1,85%
Como visto, os atrasos em ambos os modelos mostram-se muito próximos, bem como os ganhos nas piscinas
3 e 4. Nas piscinas 1 e 2, nota-se um agravamento do erro, contudo, em ambos os casos, notamos que os ganhos
encontram-se na mesma escala de grandeza.
Tais desvios dão-se devido ao fato que, tanto na piscina 1 quanto na piscina 2, o efeito de represamento da
água está em seu extremo. Como visto na Figura 11, a primeira piscina quase não apresenta represamento, o
que altera o valor referente ao ganho da função de transferência ligada à extração de água a jusante dela. Em
contra partida, a segunda piscina apresenta um represamento muito maior que as demais, o que acarreta em
erros tanto no cenário de extração a jusante quanto de admissão a montante dela.
Contudo, o modelo teórico, por envolver mais aproximações da realidade, foi tomado apenas como base
quanto a magnitude dos ganhos e atrasos e, estando de acordo com os valores obtidos pela identificação do
sistema, pode-se garantir que o modelo identificado está adequado a resolução do problema.

23
4.2. Ajuste de Ganho das Funções
As funções de transferência obtidas no tópico anterior refletem a relação entre a variação do nível a jusante
de uma dada piscina e a variação dos caudais de entrada e saída da mesma, contudo, o simulador valer-se-á da
variação da abertura da comporta, e não do caudal que por ela passa.
Para tal, ajustou-se o ganho das funções de transferência com um ganho estático obtido através da
linearização da equação da comporta.
A comporta em questão, com escoamento afogado, tem a equação definida por (1).
Sendo o canal trapezoidal, temos que a área aberta da comporta é dada por:
() = 6@A� B) = �A@CDEF� B) = G. B) + HEC� (8)
Onde:
T: Comprimento superior da área da comporta.
B: Comprimento da base da comporta.
s: Tangente do ângulo de inclinação lateral do canal
B): Elevação da comporta.
Fazendo a linearização, vemos:
$ = $I + %& . *2,*-.J − -0J. �G + �HEK� ��B) − B)J� (9)
��1� = %& . *2,*-.J − -0J. �G + �HEK� � ℎ)�1� (10)
Onde:
-.J: Nível a montante da comporta no ponto de operação.
-0J: Nível a jusante da comporta no ponto de operação.
B)J: Elevação da comporta no ponto de operação.
$J: Caudal nominal da comporta.
q(t): Variação de caudal na comporta com relação ao ponto de operação.
h(t): Variação de elevação da comporta em relação ao ponto de operação.

24
Então, o ganho estático para a conversão de caudal para a elevação da comporta é dado por:
M) = %& . *2,*-.J − -0J. �G + �HEK� � (11)
Os resultados obtidos para os ganhos foram:
Tabela 7:Ganhos estáticos das comportas
Comporta 1 Comporta 2 Comporta 3 Comporta 4
Ka 5,5216 3,6444 3,2652 2,1823
Assim sendo, as funções de transferências que regem a arquitetura de controle CLJ serão dadas pela
multiplicação do ganho da respectiva comporta pela função de transferência :;; da piscina onde a comporta
está localizada a jusante. Já para a arquitetura CDM, a função de transferência final será a multiplicação de :;<
com o ganho da comporta a montante daquela piscina. Nota-se, que no caso CDM, a admissão da primeira piscina
é dada diretamente por um caudal, sendo, então, desnecessário o ajuste de ganho para esse caso.
Lembrando que as equações têm a forma dada pela equação 5, os parâmetros ajustados de cada uma são:
Tabela 8: Parâmetros das funções de transferência finais
Piscina 1 Piscina 2 Piscina 3 Piscina 4
Kl (10-4) 31,45 29,14 33,57 31,49
Kd (10-4) 3,73 42,15 38,48 47,25
T 204 117 77 55
4.3. Sintonização dos Controladores PI
A sintonização dos controladores foi dividida em dois grupos, tendo duas etapas cada um. Cada controlador,
para o seu funcionamento, necessita de quatro parâmetros: o ganho proporcional; o ganho integral; o ganho de
Anti-Wind Up; ganho do Feedfoward.

25
Dividiu-se esses parâmetros em dois grupos, a serem analisados separadamente, um com os ganhos centrais
de controladores PI (proporcional e integral), e um com os ganhos adicionais (Anti-Wind Up e Feedfoward).
A sintonização foi feita com base na ferramenta PID Tuner fornecida no MatLab.
A primeira etapa de sintonização foi feita com base nos parâmetros sugeridos por Litrico (2003). Após esta
primeira fase, os testes foram realizados no simulador a fim de atestar que os parâmetros escolhidos estavam
de acordo com a resposta esperada.
Dados os primeiros resultados, verificou-se a necessidade de atualização dos parâmetros de sintonização.
Um estudo das causas das respostas divergirem da esperada foi feito e, com isso, realizou-se uma sintonização
minuciosa a fim de se obter os melhores resultados para os controladores.
4.3.1. Anti-Wind Up
Nos primeiros testes, onde houve a saturação nos controladores, o valor do ganho do Anti-Wind Up se
mostrou ineficaz ao problema, decorrendo erros computacionais que impediam o andamento com os testes.
A funcionalidade do Anti-Wind Up prevê a descarga do integrador do controlador em casos onde haja a
saturação do mesmo, com isso, optou-se por definir um método lógico para definir a magnitude do seu ganho.
Dada a fórmula do controlador:
NOP1�@� = QN-�@�. MR + �N-�@� − NOP1� . M?�=�. M� + S�T − O�U�V (12)
N-� . MR + S� = O�U�V + NOP1� (13)
Onde:
NOP1�: Diferença entre o valor real do controlador e o valor de saída dada a saturação no instante i.
N-�@�: Diferença entre o nível de água e a referência no instante i.
S�: Valor da parte integradora do controlador no instante i.
O�U�V: Valor de saturação no instante i.
Como o valor da diferença do nível e a referência em instantes consecutivos é baixa, e assumindo que é
desejável que não haja saturação na próxima iteração, podemos inferir que:
N-�@� =W N-� (14)

26
NOP1� + �N-� − NOP1� . M?�=�. M� = NOP1�@� = 0 (15)
M?�= = ��� + XY�XZ[\� (16)
Pela equação 10, nota-se que:
XY�XZ[\� ~ W � �^ (17)
Com isso, arbitrariamente escolheu-se:
M?�= = _�� (18)
���^ ≤ a ≤ �J�^ (19)
Diversos valores de C foram testados a fim de que cada arquitetura contasse com o valor desta constante que
condissesse com o efeito esperado do Anti-Wind Up.
4.3.2. CLJ
Para a sintonização dos controladores nesta arquitetura, primariamente, definimos que o ganho de fase do
controlador deveria ser maior de 60° e que a margem de ganho deveria ser próxima dos 12 dB, como sugerido
por Litrico (2003).
Com tais parâmetros, com o tempo amostral de 10,3 segundos, os controladores encontrados foram:
a = MR + M� 6F7�� (20)

27
Tabela 9: Constantes dos controladores CLJ
Controlador
1 2 3 4
Kp 171,97 184,89 161,13 171,72
Ki 2,248 2,405 2,096 2,234
Klim 0,022 0,021 0,024 0,022
Kff 0 0 0 0
Vale lembrar que o ganho do Feedfoward é nulo pois, nesta arquitetura, tal funcionalidade não se mostrou
necessária.
Para tais dados, realizou-se um teste no simulador. Tal teste tenta reproduzir a variação diária nas extrações
de água que podem ocorrer no canal, de modo apenas a avaliar o correto funcionamento do controlador.
Os resultados de tal teste encontram-se nas Figuras 14, 15 e 16.
Figura 14:Níveis de água a jusante do primeiro teste de CLJ

28
Que confirmam a eficácia dos parâmetros calculados para o controlador.
Figura 16:Elevação das Comportas do primeiro teste de CLJ
Figura 15:Caudais das comportas e de entrada do primeiro teste de CLJ

29
4.3.3. CDM
Tal como na arquitetura CLJ, utilizaram-se parâmetros sugeridos por Litrico (2003) para a primeira avaliação
do controlador, com que seriam a margem de fase acima de 60° e a margem de ganho em torno dos 8 db.
Contudo, logo nos primeiros testes, notou-se que o tempo de assentamento dos controladores era
extremamente alto.
Portanto, optou-se por sintonizar o controlador com a margem de ganho do sistema em torno dos 8 dB mas
com a margem de fase próxima aos 45°.
Para o ganho do Feedfoward, utilizou-se a fórmula:
Mbb� = c de�f9Ke�K (21)
Tal fórmula relaciona a raiz quadrada do caudal nominal da comporta seguinte com da comporta onde o
controlador i atua, dado que, como a saída do controlador é a variação da elevação da comporta, temos, pela
equação 1, que:
$ ~W B)� (22)
A constante F é dada pela fórmula:
c = 1,4 . 6i6� (23)
Essa constante serve para compensar o atraso dos controladores, dado que o Feedfoward não o faz, ao
relacionar o atraso do controlador i com o menor atraso do sistema. O valor numérico da expressão foi
determinado a fim de limitar o máximo valor de F a 1.
Nota-se que, como o primeiro controlador do CDM não lida com elevações de uma comporta, mas sim com
o caudal de entrada do canal, a raiz quadrada da fórmula não se aplica, ou seja:
Mbb9 = c e9Ke�jK (24)
Com isso, encontrou-se os valores a seguir para os ganhos do controlador:

30
Tabela 10: Constantes dos controladores CDM
Controlador
1 2 3 4
Kp 8,030 1,238 2,088 2,376
Ki (10-4) 5,3160 1,3542 12,545 22,666
Klim 1222,733 3129,107 199,283 110,295
Kff 0,2334 0,5515 0,9071 0
Aplicou-se a esta arquitetura o mesmo teste utilizado na arquitetura CLJ, afim de comprovar sua eficácia.
Os resultados de tal teste encontram-se apresentados nas Figuras 17, 18 e 19.
Figura 17:Níveis de água do primeiro teste de CDM

31
Que confirmam a eficácia dos parâmetros calculados para o controlador.
Figura 18: Caudais das comportas e de entrada do primeiro teste CDM
Figura 19: Elevação das comportas no primeiro teste de CDM

32
5. Resultados de Simulação
Nesta sessão, mostrar-se-ão os indicadores de desempenho utilizados em cada teste, bem como a explicação
dos cenários dos mesmos aos quais cada arquitetura de controle foi submetida, bem como os resultados.
5.1. Descrição dos indicadores de desempenho
Os indicadores de desempenho serão agrupados de três formas: Desvio do nível de referência; Desvio do
consumo de água; Energia Consumida.
Tais indicadores têm por finalidade avaliar a eficiência de cada arquitetura tanto na esfera ambiental quanto
no âmbito técnico.
5.1.1. Desvio do nível de referência
Este indicador tem por finalidade quantificar quanto uma dada arquitetura foi capaz de manter os níveis ao
longo do canal. Para tal, serão calculados as médias e os desvios padrões da diferença dos níveis a jusante de
cada piscina com o valor de referência deste nível e serão avaliados conforme os resultados.
Sendo assim, temos que os indicadores terão as fórmulas:
k=� = ∑QY��m�Tn − o�p� (25)
kq� = r∑�sY��m��tV��uvb�wC�n�� (26)
Onde:
-��x�: Nível de água a jusante da piscina i da amostra k.
o�p�: Referência do nível a jusante da piscina i.
n: Número total de amostras
33
Para tal índice, quanto menores forem os módulos dos valores obtidos, melhor o desempenho da arquitetura
para um dado teste, pois entende-se que, com um menor módulo da média e da variância, mais próximos do
valor de referência mantiveram-se os resultados.
5.1.2. Desvio do consumo de água
Com uma variação das extrações de água pelo canal, é de se esperar que os caudais de entrada e saída deste
se alterem. Contudo, afim de quantificar a eficiência dos controladores na economia de água, comparou-se as
entradas totais de água e as extrações totais no canal em relação aos seus valores nominais.
Portanto, para tal, determinou-se:
k0[ = y e�j 0\ y ez{|F 0\}y e�jjzV�j~U 0\ y ez{|FjzV�j~U 0\} (27)
Onde:
$�n: Caudal de entrada no canal.
$�njzV�j~U: Caudal de entrada no canal nas condições nominais.
$I.\�: Somatória dos diversos caudais das extrações de água ao longo do canal.
$I.\�jzV�j~U: Somatória dos diversos caudais das extrações de água ao longo do canal nas condições
nominais.
Para tal indicador, valores próximos ao unitário representam que o controlador desempenhou seu trabalho
com eficiência próxima que o caso nominal, assim sendo, valores menores que 1 representam um melhor
desempenho e valores acima de 1 representam um desprendimento maior de água para o funcionamento
correto do controlador.

34
5.1.3. Energia consumida
Sabendo que o trabalho realizado pela movimentação das comportas é diretamente proporcional à energia
gasta pelos atuantes, podemos escrever tal indicador como:
kv = ∑ ∑ |∆��,�.�[�,�@)�|nE (28)
Onde:
∆��: Movimento realizado pela comporta i entre os momentos j+1 e j.
P�,�: Aceleração da comporta i no momento j.
g: Aceleração da gravidade.
ng: Número de comportas computadas para o cálculo.
Como este indicador reflete diretamente a energia gasta, o desempenho do controlador será melhor dado
um menor valor do indicador.
5.2. Criação de testes padrões para avaliações das arquiteturas
Para a avaliação das arquiteturas de controle, diversos testes foram realizados com a finalidade de descobrir
se os limites de ação dos controladores, bem como cada arquitetura, comporta-se aos diversos cenários testados.
Para tal avaliação, foram criados quatro cenários de extração de água ao longo do canal, cada qual com uma
sincronização diferente nas aberturas e encerramentos das variações dos caudais das tomadas de água. Para
além disso, cada cenário será testado em oito diferentes amplitudes de extração, onde todas as tomadas de água
serão afetadas com a mesma amplitude.
A amplitude de extração, adimensional, foi modelada a ter valores entre -1 e 1, sendo que o valor mínimo
corresponde a extração mínima possível, o valor máximo a maior extração local possível e o valor nulo à extração
local nominal, a qual será utilizada apenas como o cenário padrão para comparação, relações descritas nas
fórmulas a seguir.
−1 ≤ P" ≤ 1 (29)
$I.\� = P" . s$I.\�,V~� − $I.\�,jzV�j~Uw + $I.\�,jzV�j~U (30)
Onde:

35
$I.\�: Extração no ponto i.
$I.\�,V~�: Extração máxima possível no ponto i.
$I.\�,jzV�j~U: Extração nominal no ponto i.
5.2.1. Tabela de Atrasos
Para a criação de cenários onde a influência das variações das extrações de água fosse máxima nos níveis a
jusante de cada piscina, afim de forçar o controlador ao limite, notou-se a necessidade da definição de quanto
tempo demoraria para que, ao variar o caudal de uma determinada tomada de água, os níveis a montante e a
jusante desta tomada sofressem a sua influência.
Para cada uma das tomadas de água, então, realizou-se uma simulação, a partir das condições nominais e
com as comportas fixas (sem ação de controle), variando-se apenas aquela tomada. Dados os resultados, foi
possível determinar os tempos de atraso da influência de cada tomada de água em relação aos níveis a montante
(Tu) e a jusante (Td) dela. Os resultados estão apresentados na tabela a seguir, em minutos.
Tabela 11:Atrasos a montante e a jusante das tomadas de água em cada piscina
Piscina 1 Piscina 2 Piscina 3 Piscina 4
Tomada Tu (min) Td (min) Tu (min) Td (min) Tu (min) Td (min) Tu (min) Td (min)
1 6,68 28,50 2,57 16,13 2,05 10,47 2,73 7,37
2 13,90 23,87 5,32 13,90 4,97 8,58 4,63 5,83
3 21,28 18,88 8,40 12,02 7,20 6,87 6,52 4,28
4 28,50 14,25 11,67 9,95 10,63 5,15 8,58 2,92
5 36,05 9,45 14,58 7,88 12,70 3,27 10,30 1,37
6 43,08 4,45 17,52 5,83 15,45 1,72 12,87 0,00
7 50,82 0,00 21,12 3,78 18,20 0,00 - -
8 - - 24,20 1,72 - - - -
9 - - 26,95 0,00 - - - -
36
Vale notar que o valor do atraso da última tomada de cada piscina em relação ao nível a jusante é nulo dado
que essas tomadas são posicionadas no mesmo ponto onde é feita a medição do nível.
5.2.2. Cenários de extração
Os cenários criados visam forçar os controladores em duas situações distintas: o caso de uma variação
máxima no nível a ser controlado; o caso de uma série de variações de amplitudes distintas no nível a ser
controlado.
Tais cenários, ainda, podem representar uma influência em conjunto dos níveis ou uma influência
sequencial, isto é, um primeiro caso onde todos os níveis sofrem a influência das variações das tomadas de água
ao mesmo tempo ou onde a influência de um nível a montante é passada de forma sequencial aos níveis a
jusante.
Todos os cenários podem ser divididos em quatro partes: a tomada de ação (variação das extrações);
tempo de resposta dos controladores; volta às condições nominais; novo tempo de resposta dos controladores.
Em todos os testes, o tempo simulado é de 24 horas, sendo que as três primeiras etapas ocorrem até às
12 horas de simulação e as horas restantes são para a quarta parte do cenário, onde os controladores devolvem
o sistema às condições padrões de funcionamento.
Assim sendo, foram criados quatro cenários, a serem descritos abaixo.
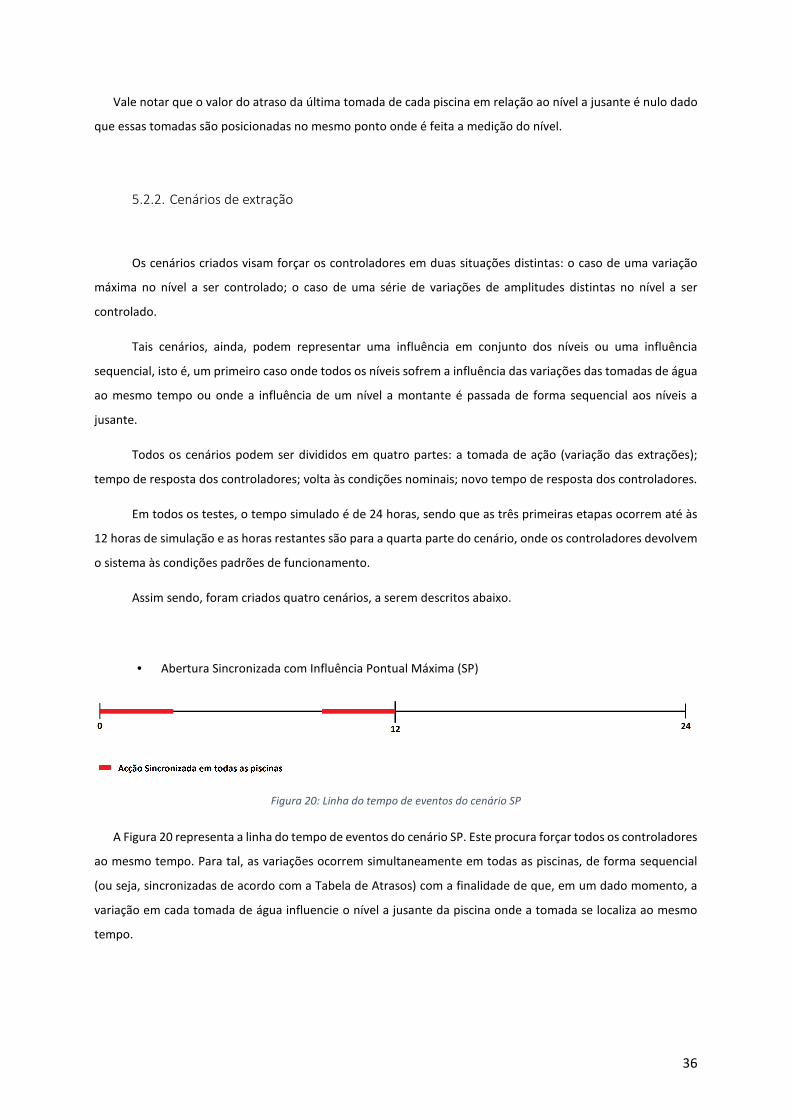
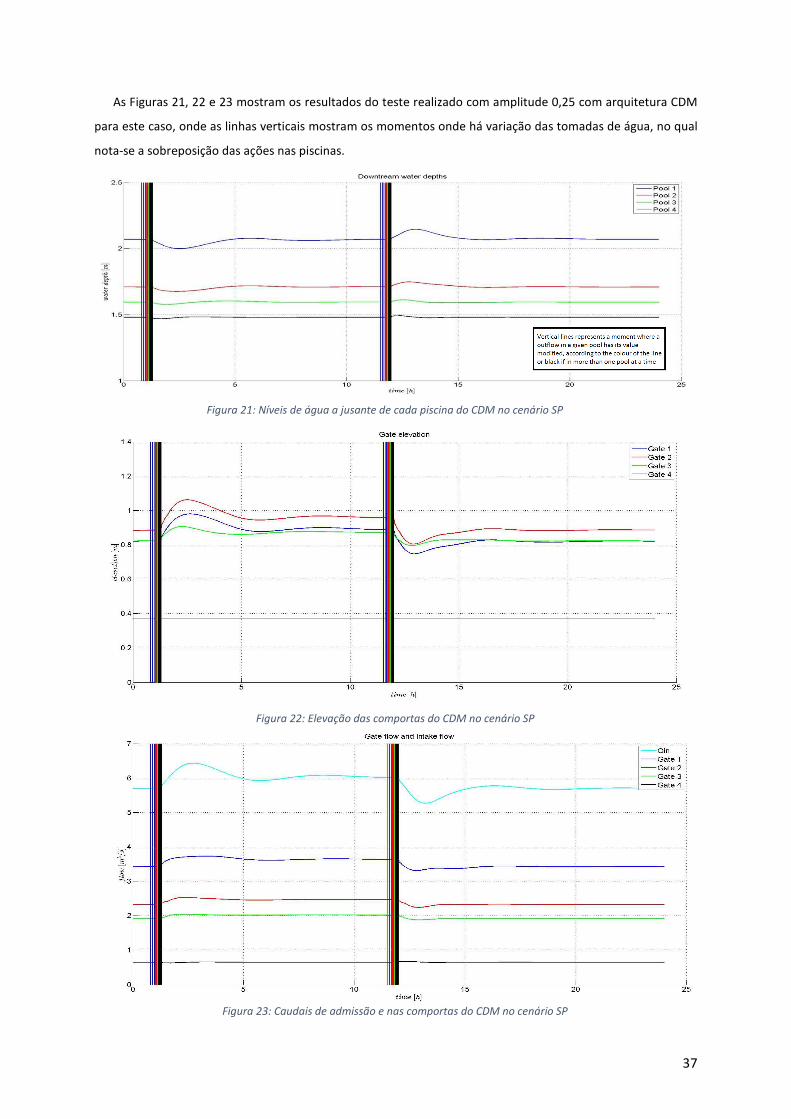
• Abertura Sincronizada com Influência Pontual Máxima (SP)
Figura 20: Linha do tempo de eventos do cenário SP
A Figura 20 representa a linha do tempo de eventos do cenário SP. Este procura forçar todos os controladores
ao mesmo tempo. Para tal, as variações ocorrem simultaneamente em todas as piscinas, de forma sequencial
(ou seja, sincronizadas de acordo com a Tabela de Atrasos) com a finalidade de que, em um dado momento, a
variação em cada tomada de água influencie o nível a jusante da piscina onde a tomada se localiza ao mesmo
tempo.
37
As Figuras 21, 22 e 23 mostram os resultados do teste realizado com amplitude 0,25 com arquitetura CDM
para este caso, onde as linhas verticais mostram os momentos onde há variação das tomadas de água, no qual
nota-se a sobreposição das ações nas piscinas.
Figura 21: Níveis de água a jusante de cada piscina do CDM no cenário SP
Figura 23: Caudais de admissão e nas comportas do CDM no cenário SP
Figura 22: Elevação das comportas do CDM no cenário SP

38
• Abertura Sincronizada com Influência Sequencial (SS)
Figura 24: Linha do tempo de eventos do cenário SS
A Figura 24 apresenta a linha do tempo de eventos do cenário SS, que procura forçar os controladores de
forma que o nível controlado por cada um apresente a variação máxima possível. Com isso, a influência que um
nível sofre com a variação dos caudais de extração é propagada ao nível a jusante.
Este efeito em cascata é gerado ao variar as extrações em cada piscina sincronizadamente, como no caso
anterior, mas, ao invés das aberturas sincronizadas ocorrerem simultaneamente entre as piscinas, elas ocorrem
de modo sequencial.
As Figuras 25, 26 e 27 mostram os resultados do teste realizado com amplitude 0,25 com arquitetura CDM
para este caso, onde as linhas verticais mostram os momentos onde há variação das tomadas de água, onde fica
evidente a tomada de ação nas piscinas sequencialmente.
Figura 25:Níveis de água a jusante de cada piscina do CDM no cenário SS
Figura 26:Elevação das comportas do CDM no cenário SS

39
• Abertura Estática com Influência Pontual Máxima (EP)
Figura 28:Linha do tempo de eventos do cenário EP
A linha do tempo de eventos do cenário EP está apresentada na Figura 28. O cenário EP procura explorar a
capacidade dos controladores de lidar com perturbações em série simultaneamente. O objetivo desse teste é
alcançado ao variar os caudais de todas as extrações de água ao mesmo tempo. Com isso, cada nível a jusante
de cada piscina será afetado pelas influências das tomadas de água de forma sequencial.
As Figuras 29, 30 e 31 mostram os resultados do o teste realizado com amplitude 0,25 com arquitetura CDM
para este caso, onde a linha vertical mostra o momento onde há variação em todas as tomadas de água do canal.
Figura 27:Caudais de admissão e nas comportas do CDM no cenário SS
Figura 29:Níveis de água a jusante de cada piscina do CDM no cenário EP

40
• Abertura Estática com Influência Sequencial (ES)
Figura 32:Linha do Tempo de eventos do cenário ES
O cenário ES, cuja linha do tempo de eventos está na Figura 32, bem como o cenário anterior, procura estudar
a capacidade do controlador em resolver as perturbações em série que o acarretariam. Porém, diferentemente
Figura 31:Caudais de admissão e nas comportas do CDM no cenário EP
Figura 30: Elevação das comportas do CDM no cenário EP
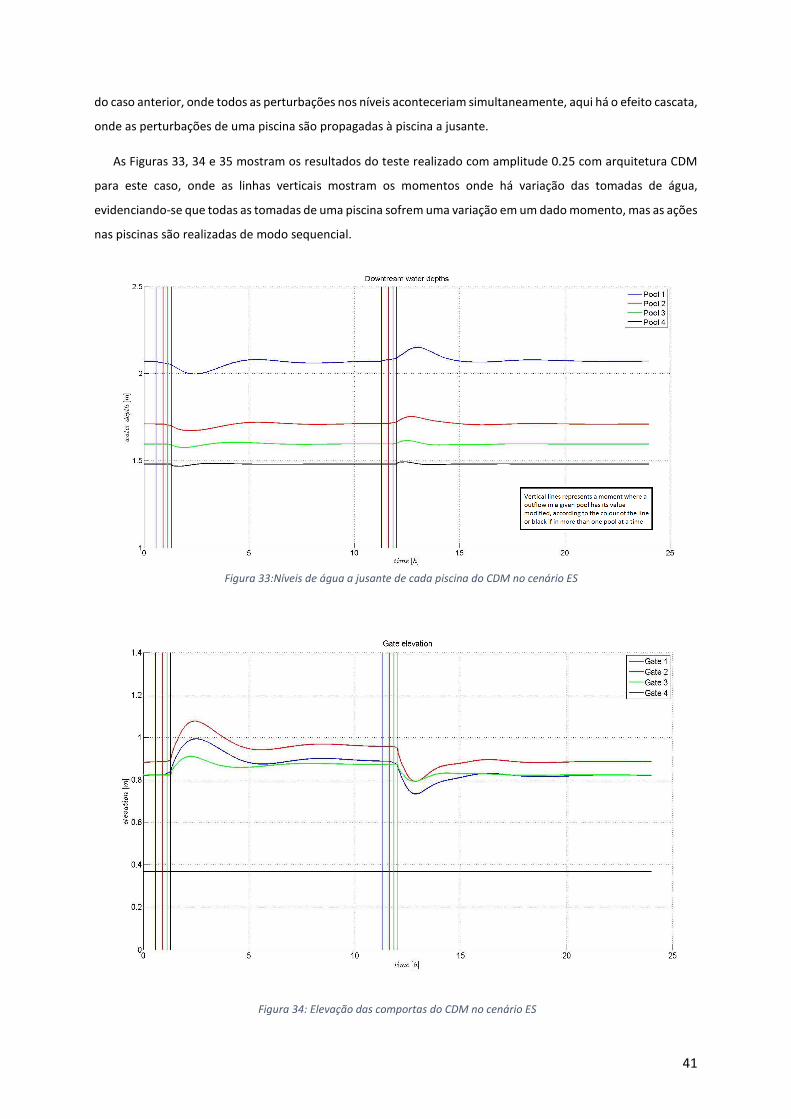
41
do caso anterior, onde todos as perturbações nos níveis aconteceriam simultaneamente, aqui há o efeito cascata,
onde as perturbações de uma piscina são propagadas à piscina a jusante.
As Figuras 33, 34 e 35 mostram os resultados do teste realizado com amplitude 0.25 com arquitetura CDM
para este caso, onde as linhas verticais mostram os momentos onde há variação das tomadas de água,
evidenciando-se que todas as tomadas de uma piscina sofrem uma variação em um dado momento, mas as ações
nas piscinas são realizadas de modo sequencial.
Figura 34: Elevação das comportas do CDM no cenário ES
Figura 33:Níveis de água a jusante de cada piscina do CDM no cenário ES

42
5.3. Desempenho das arquiteturas
As comparações serão feitas para cada indicador de desempenho, bem como estudadas as causas para dados
comportamentos de cada arquitetura. Os gráficos a serem apresentados mostrarão a evolução de um indicador
com o aumento da amplitude de extração para um dado cenário. No total, foram realizados 32 testes além do
teste em condições nominais, ou seja, cada um dos quatro cenários foi testado em oito valores de amplitude.
5.3.1. Desvio do consumo de água
Os valores do ��� encontrados estão apresentados nas Figuras 36 e 37.
Figura 35:Caudais de admissão e das comportas do CDM no cenário ES
0,985
0,990
0,995
1,000
1,005
1,010
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
��� - CLJ
SP SS EP ES Amplitude
ηda
Figura 36: Indicador de desvio do consumo de água para a arquitectura CLJ

43
A análise dos gráficos, em ambos os casos, mostra uma relação linear entre o indicador e a amplitude de
extração, contudo, nota-se uma inclinação menor da reta no caso do CLJ para quando há excesso de água no
sistema (amplitudes negativas), o que representa um desempenho melhor para tais casos.
Como o caudal de admissão no CLJ é feito de forma manual, com base no perfil das extrações de água diárias,
consegue-se uma sincronização mais precisa de quando se deve variar o caudal com o início das influências das
tomadas de água em cada piscina. Somando-se à resposta rápida dos controladores ao fato de que esvair uma
piscina de água é uma ação mais rápida do que enchê-la, acarretam no fenômeno mencionado.
Entretanto, a variação do indicador, em ambos os casos, é no máximo de 1,5% do valor nominal, ou seja,
ambas as arquiteturas se mostraram eficazes na poupança de água e relativamente constantes, tornando-as
aceitáveis no âmbito ambiental. Porém, mesmo que seja baixa a variação do consumo, a maior economia de
água no sistema dá-se quanto maior sua requisição. Posto em uma situação real, o aumento do consumo dá-se
na época de maior estiagem, ou seja, é de suma importância que haja maior economia de água.
Um outro ponto, dado que a água é o produto a ser comercializado, nota-se também certa vantagem nesse
perfil de desempenho, pois economiza-se mais água quando ela é menos disponível no reservatório que alimenta
o canal.
5.3.2. Energia Consumida
Os resultados encontrados para o �� estão apresentados nas Figuras 38 e 39.
0,985
0,990
0,995
1,000
1,005
1,010
1,015
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
��� - CDM
SP SS EP ESAmplitude
ηda
Figura 37: Indicador de desvio do consumo de água para a arquitectura CDM
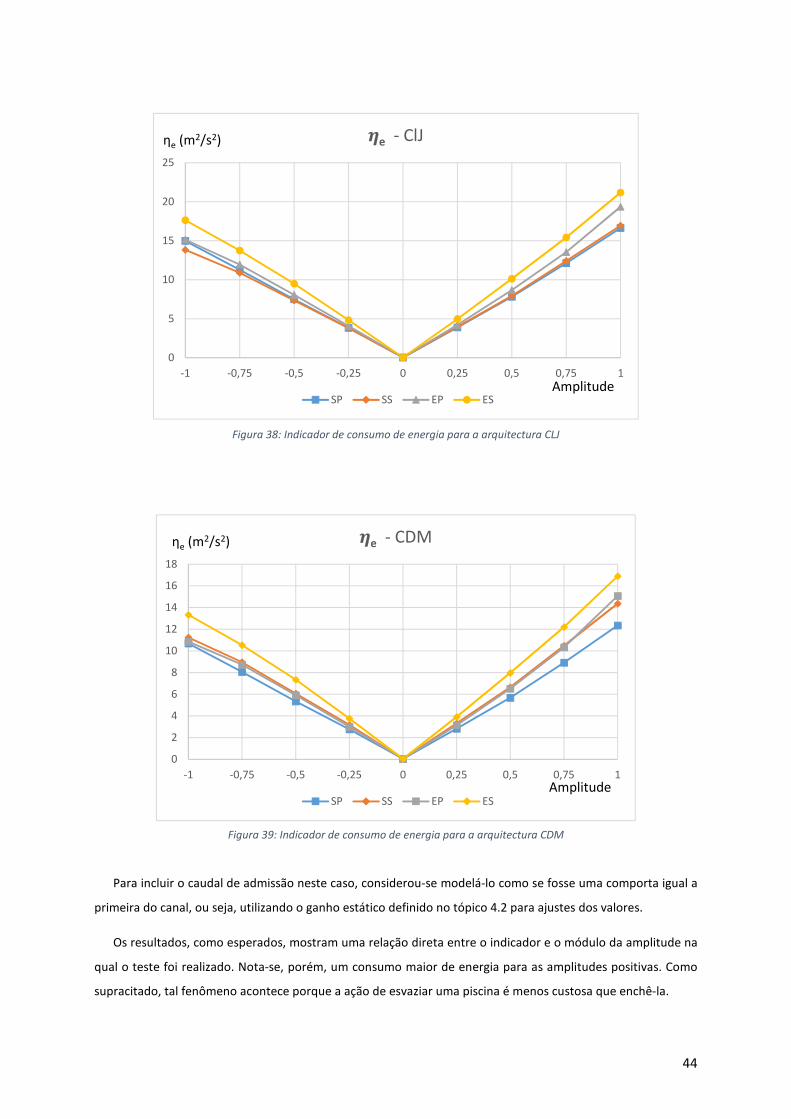
44
Para incluir o caudal de admissão neste caso, considerou-se modelá-lo como se fosse uma comporta igual a
primeira do canal, ou seja, utilizando o ganho estático definido no tópico 4.2 para ajustes dos valores.
Os resultados, como esperados, mostram uma relação direta entre o indicador e o módulo da amplitude na
qual o teste foi realizado. Nota-se, porém, um consumo maior de energia para as amplitudes positivas. Como
supracitado, tal fenômeno acontece porque a ação de esvaziar uma piscina é menos custosa que enchê-la.
0
5
10
15
20
25
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�e - ClJ
SP SS EP ES
ηe (m2/s2)
Amplitude
Figura 38: Indicador de consumo de energia para a arquitectura CLJ
0
2
4
6
8
10
12
14
16
18
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�e - CDM
SP SS EP ES
ηe (m2/s2)
Amplitude
Figura 39: Indicador de consumo de energia para a arquitectura CDM

45
Em ambos os casos, apenas 4 comportas são amplamente movimentadas. No caso do CDM, a última
comporta é fixa, e no caso CLJ, a admissão do canal sofre alterações pontuais e mínimas, portanto, podemos
excluir tais diferenças arquitetônicas como as causas para a diferença.
Nota-se que a arquitetura CLJ consome entre 20% e 40% mais energia que a arquitetura CDM. Em uma análise
mais profunda, como a dos ganhos dos controladores, tanto integral quanto proporcional, em cada arquitetura
mostra que são esperados movimentos de maior amplitude e em maior frequência no caso CLJ, o que é apontado
como a causa do elevado consumo energético.
5.3.3. Desvio do nível de referência
Para avaliarmos e compararmos cada arquitetura no seu desempenho técnico, inicialmente, estudar-se-á
isoladamente cada arquitetura e, enfim, com base nesse estudo, compará-las, devido a quantidade de dados
obtidos neste indicador de desempenho.
• CLJ
Para esta arquitetura, os valores da média dos desvios de nível e seus desvios padrões, para cada piscina,
estão apresentados nas Figuras 40 a 43, em milímetros.
0,000
0,020
0,040
0,060
0,080
0,100
0,120
0,140
0,160
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�r - CLJ - Piscina 1
SP SS EP ES
ηr (mm)
Amplitude-0,0016
-0,0014
-0,0012
-0,0010
-0,0008
-0,0006
-0,0004
-0,0002
0,0000
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�m - CLJ - Piscina 1
SP SS EP ES
ηm (mm) Amplitude
Figura 40: Gráficos dos indicadores de desvio dos níveis do CLJ para a piscina 1

46
0,000
0,002
0,004
0,006
0,008
0,010
0,012
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�m - CLJ - Piscina 2
SP SS EP ES
ηm (mm)
Amplitude
0,000
0,020
0,040
0,060
0,080
0,100
0,120
0,140
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�r - CLJ - Piscina 2
SP SS EP ES
ηr (mm)
Amplitude
Figura 41: Gráficos dos indicadores de desvio dos níveis do CLJ para a piscina 2
0,000
0,010
0,020
0,030
0,040
0,050
0,060
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�r - CLJ - Piscina 3
SP SS EP ES
ηr (mm)
Amplitude-0,0004
-0,0003
-0,0002
-0,0001
0,0000
0,0001
0,0002
0,0003
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�m - CLJ - Piscina 3
SP SS EP ES
ηm (mm)
Amplitude
0,000
5,000
10,000
15,000
20,000
25,000
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�r - CLJ - Piscina 4
SP SS EP ES
ηr (mm)
Amplitude-7,000
-6,000
-5,000
-4,000
-3,000
-2,000
-1,000
0,000
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�m - CLJ - Piscina 4
SP SS EP ES
ηm (mm) Amplitude
Figura 42:Gráficos dos indicadores de desvio dos níveis do CLJ para a piscina 3
Figura 43:Gráficos dos indicadores de desvio dos níveis do CLJ para a piscina 4

47
Tais resultados mostram, para a maioria dos testes, valores realmente baixos para as médias e desvios, o que
mostra que os controladores são capazes, na maioria dos casos, de controlar os níveis com excelência. Contudo,
notou-se que o desempenho do sistema de controle depende tanto do cenário quanto da amplitude as quais o
simulador foi submetido.
Como os gráficos mostram, os módulos dos erros são diretamente proporcionais ao módulo da amplitude de
extração, como era esperado. Contudo, notou-se uma grande discrepância entre os resultados para diferentes
cenários.
Os cenários SS e ES apresentaram os piores resultados para esta arquitetura, enquanto o cenário EP
demonstrou alguns casos onde o erro também era bastante agravado. Como as falhas no cenário SP são os
menores, notamos que a arquitetura não tem problemas para lidar com grandes influências pontuais, porém,
quando existe uma sequência de influências consecutivas ou a sobreposição de influências das piscinas a
montante, o controlador acaba por ter piores resultados.
Dado que as influências seguem em sua maior força no sentido a jusante, era de se esperar que o nível da
quarta piscina fosse o que mais sofresse com tais influências. Nos testes com cenários SS, EP e ES, com elevados
módulos de amplitude, notou-se que os erros na quarta piscina foram, pelo menos, três ordens de grandeza mais
elevados.
As Figuras 44, 45 e 46 apresentam os resultados dos testes para tais cenários com amplitude -1:
Figura 44:Teste no cenário EP com amplitude -1 do CLJ

48
Figura 45:Teste no cenário SS com amplitude -1 do CLJ
Figura 46: Teste no cenário ES com amplitude -1 do CLJ
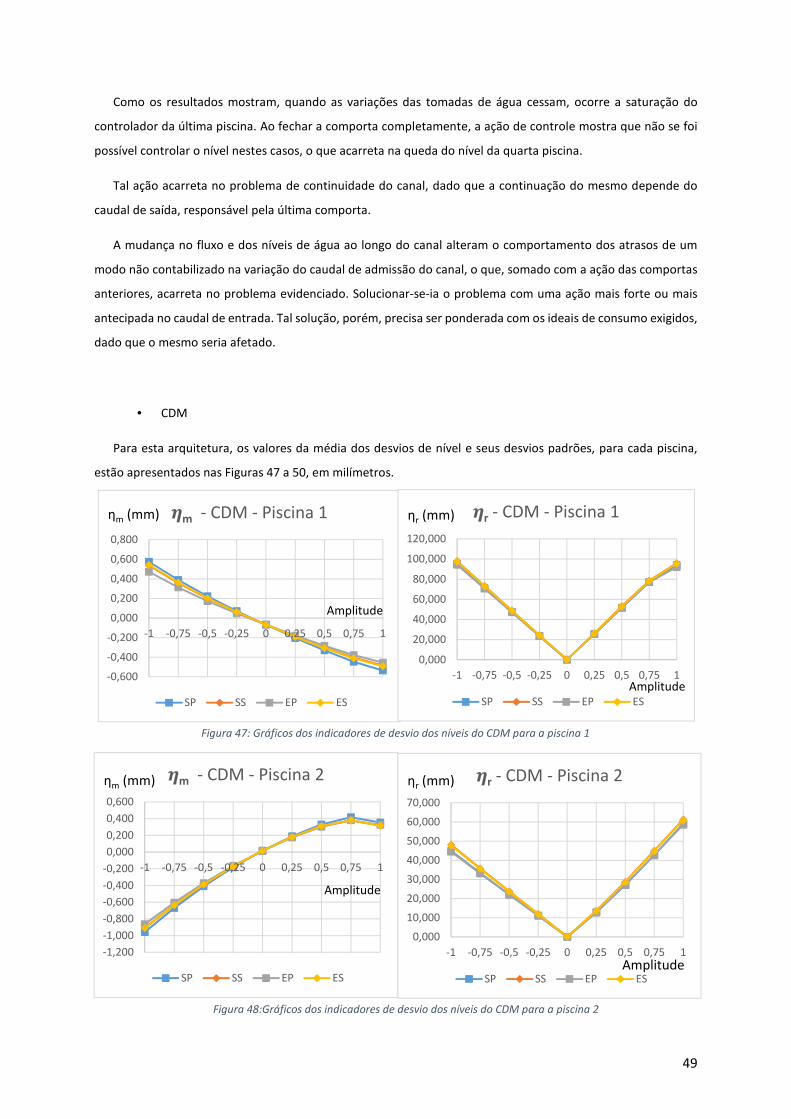
49
Como os resultados mostram, quando as variações das tomadas de água cessam, ocorre a saturação do
controlador da última piscina. Ao fechar a comporta completamente, a ação de controle mostra que não se foi
possível controlar o nível nestes casos, o que acarreta na queda do nível da quarta piscina.
Tal ação acarreta no problema de continuidade do canal, dado que a continuação do mesmo depende do
caudal de saída, responsável pela última comporta.
A mudança no fluxo e dos níveis de água ao longo do canal alteram o comportamento dos atrasos de um
modo não contabilizado na variação do caudal de admissão do canal, o que, somado com a ação das comportas
anteriores, acarreta no problema evidenciado. Solucionar-se-ia o problema com uma ação mais forte ou mais
antecipada no caudal de entrada. Tal solução, porém, precisa ser ponderada com os ideais de consumo exigidos,
dado que o mesmo seria afetado.
• CDM
Para esta arquitetura, os valores da média dos desvios de nível e seus desvios padrões, para cada piscina,
estão apresentados nas Figuras 47 a 50, em milímetros.
-0,600
-0,400
-0,200
0,000
0,200
0,400
0,600
0,800
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�m - CDM - Piscina 1
SP SS EP ES
ηm (mm)
Amplitude
0,000
20,000
40,000
60,000
80,000
100,000
120,000
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�r - CDM - Piscina 1
SP SS EP ES
ηr (mm)
Amplitude
Figura 47: Gráficos dos indicadores de desvio dos níveis do CDM para a piscina 1
-1,200
-1,000
-0,800
-0,600
-0,400
-0,200
0,000
0,200
0,400
0,600
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�m - CDM - Piscina 2
SP SS EP ES
ηm (mm)
Amplitude
0,000
10,000
20,000
30,000
40,000
50,000
60,000
70,000
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�r - CDM - Piscina 2
SP SS EP ES
ηr (mm)
Amplitude
Figura 48:Gráficos dos indicadores de desvio dos níveis do CDM para a piscina 2

50
O primeiro fato a evidenciar nesta arquitetura é a semelhança dos indicadores em todos os cenários a que
foi submetida.
Os desvios das médias em cada piscina, na maioria dos testes, apesar de serem mais elevadas que as da outra
arquitetura, acabam por enquadrar-se de forma aceitável ao problema. Contudo, nota-se valores muito elevados
dos desvios padrões, proporcionalmente ao aumento do módulo da amplitude dos testes.
Considerando-se três desvios padrões, afim de compreender 99.7% dos resultados de um modo estatístico,
notamos que o desvio máximo estatístico do nível controlado em cada piscina em relação ao seu nível de
referência é:
Figura 49:Gráficos dos indicadores de desvio dos níveis do CDM para a piscina 3
-2,500
-2,000
-1,500
-1,000
-0,500
0,000
0,500
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�m - CDM - Piscina 4
SP SS EP ES
ηm (mm)
Amplitude
0,000
2,000
4,000
6,000
8,000
10,000
12,000
14,000
16,000
18,000
20,000
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�r - CDM - Piscina 4
SP SS EP ES
ηr (mm)
Amplitude
-20,000
-15,000
-10,000
-5,000
0,000
5,000
-1 -0,75 -0,5 -0,25 0 0,25 0,5 0,75 1
�m - CDM - Piscina 3
SP SS EP ES
ηm (mm)
Amplitude
Figura 50: Gráficos dos indicadores de desvio dos níveis do CDM para a piscina 4

51
Tabela 12: Desvio máximo dos níveis obtidos nos testes do CDM em relação aos valores de referência
Piscina
1 2 3 4
�r (m) 0,096 0,061 0,044 0,019
3.�r (m) 0,288 0,184 0,132 0,056
Ref (m) 2,07 1,71 1,595 1,48
% 13,91% 10,76% 8,25% 3,79%
No pior caso, na piscina 1, ocorrem desníveis de até 14% em relação ao nível de referência o que, apesar de
não comprometer o funcionamento do controlador, acaba não sendo aceitável para a resolução do problema.
Contudo, a ação do controlador pouco interfere nestes picos, dado que eles ocorrem no período compreendido
pelo atraso do sistema.
Outro ponto relevante nota-se quando se aplicam os testes com amplitude igual a 1 ao CDM, pois os desvios
das médias nas últimas duas piscinas se agravam.
Tal comportamento pode ser explicado ao observar-se os resultados de um dos testes, como nas Figuras 51
e 52, onde mostra-se claramente a saturação da ação de controle.
Figura 51: Teste no cenário SP com amplitude 1 do CDM

52
A saturação causa um maior tempo de assentamento para o nível controlado, o que resulta em um maior
erro deste.
5.3.4. Comparação entre os modelos
Ambas as arquiteturas de controle mostraram-se eficientes a variações moderadas das amplitudes das
extrações de água quanto aos cenários de extrações desenvolvidos, mas ambos mostraram falhas quando as
amplitudes são elevadas aos extremos.
O indicador de consumo de água mostrou que a variação do consumo é mínima nos diversos testes realizados.
Além disso, notou-se que o desempenho dos sistemas foi menor que o desempenho nominal apenas para os
casos onde se diminui a extração de água nas tomadas.
Quanto ao consumo energético resultado pela movimentação das comportas, notou-se uma melhor
eficiência da arquitetura CDM, com aumento de eficiência a 20% e 40% maiores.
No quesito técnico, o CLJ mostrou-se mais eficiente que o CDM, apresentando erros muito menores. Apesar
da eficiência em estabilizar os níveis após uma perturbação ser menor no CDM, o mesmo cumpre o que era
suposto.
Entretanto, em ambos os casos, notou-se que em amplitudes extremas há a presença de erros maiores devido
à saturação dos controladores. Nestes casos, avaliou-se o comportamento “egoísta” dos controladores CLJ, onde
houve o completo fechamento de uma comporta, o que impossibilitou a continuidade de caudal à jusante do
Figura 52: Detalhe do momento onde ocorre a saturação das saídas do CDM.

53
canal estudado. Este mesmo problema não ocorreu no caso dos controladores CDM, o que mostra uma enorme
vantagem nesta arquitetura.
Em todos os testes onde os indicadores não foram satisfatórios, notou-se a presença de saturação na saída
do controlador. Portanto, podemos dizer que a zona segura de ação dos controladores, ou seja, onde os
indicadores são completamente satisfatórios, é onde não ocorre a saturação dos mesmos. Além disso, como os
indicadores refletem diretamente alguns pontos do projeto de um canal, deve-se sempre testar o projeto com o
benchmark criado afim de atestar, com segurança, se os controladores criados são eficientes para os limites
estabelecidos no processo de design de um canal.
5.4. Análise do sistema perante a presença de falhas
Tendo em vistas os testes já realizados, escolheu-se o cenário SS para realizar os testes com falhas no sistema
pois este mostrou-se o mais penoso para as arquiteturas de controle.
Nesta etapa, foram realizados dois testes, a título de se entender o funcionamento das falhas em cada
arquitetura. Primeiramente, criou-se uma falha na comporta responsável pelo controle de nível da segunda
piscina, em cada arquitetura.
O teste de falha da comporta assume que a comporta não responderá a nenhuma ação tomada pelo
controlador desde o início da simulação. A amplitude das extrações de água utilizada para tal teste foi de 0,75,
pois os testes anteriores mostraram-se eficazes para estas condições.
Os resultados para as arquiteturas CLJ e CDM, respectivamente, foram:
Figura 53:Teste com falha de comporta no cenário SS, amplitude 0,75 do CLJ

54
Tais resultados tiveram os seguintes indicadores de desempenho:
Tabela 13: Indicadores de desempenho para testes com falhas na comporta
�m por Piscina (mm) �r por Piscina (mm)
�a �e (m2/s2) 1 2 3 4 1 2 3 4
CLJ 0,995 28,236 -0,001 61,543 0,000 0,000 0,090 58,504 0,027 0,064
CDM 0,973 333,703 -1,669 -165,737 -123,988 -56,867 24,522 103,692 119,124 70,932
Como pode-se notar, ambos os casos continuaram com valores dos indicadores de consumo de água normais,
porém, os demais fatores mudaram significativamente.
No caso do consumo energético, nota-as que o CLJ consumiu menos energia (dado que apenas 3 comportas
foram movimentadas). Contudo, no caso do CDM, houve um aumento da energia de quase 6 vezes. Tal fato
explica-se pois, quando em saturação, a ação do Anti-Wind Up do controlador acaba fazendo a comporta
realizar movimentos de pequena amplitude, mas de alta frequência, o que contribui para o incrível
aumento do consumo energético, mesmo sendo considerada uma comporta a menos para o cálculo.
Na arquitetura do CLJ, notou-se um desvio dos indicadores de nível apenas na piscina 2, a qual o
nível a ser controlado era responsabilidade da comporta defeituosa. Porém, no caso CDM, notou-se
que tanto o nível da segunda piscina quanto os das piscinas a jusante desta apresentaram erros
significantes. Tal fato deu-se pois, o nível a montante de uma dada comporta nesta arquitetura, é o
Figura 54:Teste com falha de comporta no cenário SS, amplitude 0,75 do CDM

55
mesmo de saturação do controlador. Quando o nível da segunda piscina não foi controlado e, no caso,
diminuiu, a segunda comporta entra em saturação e deixa de controlar o nível a jusante da terceira
piscina, criando um efeito dominó pelo sistema.
Quando se realizou o mesmo teste, mas com amplitude das extrações igual -0,75, nota-se uma
diferença dos resultados no caso CDM:
Tabela 14: Comparação dos indicadores para os testes com falhas da comporta
�m por Piscina (mm) �r por Piscina (mm)
Amp �a �e(m2/s2) 1 2 3 4 1 2 3 4
CLJ 0,75 0,995 28,2 -0,001 61,543 0,000 0,000 0,090 58,504 0,027 0,064
-0,75 1,008 25,2 -0,001 -60,154 0,000 -0,003 0,090 56,922 0,028 0,102
CDM 0,75 0,973 333,7 -1,669 -165,737 -123,988 -56,867 24,522 103,692 119,124 70,932
-0,75 1,013 22,2 0,864 285,871 -1,378 0,001 38,294 297,453 11,950 6,593
Como evidenciado, o CLJ acaba por ter o mesmo desempenho em ambos os testes, mas o CDM apresenta
uma melhora significativa nas piscinas onde ainda há o controle sendo realizado. Analisando a Figura 55 a seguir,
pode-se descobrir o motivo:
Nota-se que não há a saturação dos controladores para este caso, o que justifica a melhor atuação da
arquitetura.
Figura 55: Teste com falha de comporta no cenário SS, amplitude -0,75 do CDM

56
O segundo teste recria o cenário SS com amplitude 1 para o caso onde haja extrações de água não previstas
pelo sistema. Devido ao fato que a arquitetura CDM não sofreria efeitos sobre isso, já que a ciência prévia das
extrações não é necessária, este teste aplicou-se apenas a arquitetura CLJ.
Neste teste, as variações das extrações da primeira piscina não serão contabilizadas para a variação do caudal
de entrada, criando-se assim a falha.
Os resultados estão apresentados na Figura 56.
E, para este caso, obtivemos os seguintes indicadores:
Tabela 15: Indicadores de desempenho para testes com falhas de extração
�m por Piscina (mm) �r por Piscina (mm)
�a �e (m2/s2) 1 2 3 4 1 2 3 4
CLJ 0,960 38,869 -0,002 0,000 0,000 -10,004 0,133 0,018 0,049 28,146
Este ensaio acaba por ter índices parecidos com os obtidos pelo mesmo ensaio mas sem a presença de falhas.
Contudo, notou-se maior tempo de encerramento da quarta comporta, um período de aproximadamente 4
horas, o que no teste sem falhas era de 2,5 horas.
Com isso, pode-se afirmar que, para a arquitetura CLJ, as falhas de extrações de água são muito mais
importantes que as falhas passíveis de se acontecerem nas comportas, dada a independência de cada
controlador desta arquitetura. Em contra partida, o CDM, em sua definição, consegue corrigir autonomamente
as variações nas tomadas de água, contudo, como o sistema é mais interdependente, acaba por sofrer maiores
danos caso uma comporta falhe.
Figura 56:Teste com falha nas extrações no cenário SS, amplitude 1 do CLJ

57
6. Conclusões
Os sistemas de transporte de água têm representado, ao longo dos anos, um dos sistemas mais importantes
para a sociedade e um assunto recorrente quando se trata do meio ambiente. O uso consciente da água é uma
pauta mundial e o planejamento dos meios por onde ela circula tornaram-se cada vez mais avançados e precisos.
O estudo realizado teve por finalidade confrontar as arquiteturas de controle mais usuais para os sistemas
de transporte de água, valendo-se do Canal de Rega de Vila Nova de Milfontes. Ao criar cenários onde os diversos
sistemas pudessem ser testados, juntamente com indicadores genéricos para comparação, pode-se estabelecer
o benchmark para os canais de rega.
Para obter os resultados, explorou-se exaustivamente a área de controle de sistemas para o desenvolvimento
das arquiteturas, investigando cada variável dos sistemas a fundo e, assim, escolhendo sistemas eficientes e
funcionais para o desenvolvimento dos testes.
O benchmark criado baseia-se em noções básicas de estatística, transporte de fluidos e mecânica clássica,
onde os indicadores desenvolvidos compreendem os principais pontos de projeto de um sistema de controle, de
um modo amplo para que, independente da arquitetura escolhida, seja possível comparar qualquer sistema e,
assim, escolher o mais apropriado para cada caso.
A arquitetura de Controle Distante a Montante (CDM) mostrou-se menos suscetível às diferenças de cenários
de extração, sendo os seus indicadores proporcionais apenas às amplitudes das variações das tomadas de água
pelo canal. Contudo, nota-se um sistema onde a integração dos controladores é grande, ou seja, no caso de
falhas estruturais, os erros de um controlador acabam por se propagar para toda a estrutura.
Em contra partida, a arquitetura de Controle Local a Jusante (CLJ) mostra que, por ter uma resposta mais
rápida e precisa, além do fato de que o caudal de admissão do canal é feito manualmente, seus indicadores
variam de um cenário para outro, além de variar devido às amplitudes de extração pelo canal. Por ter seus
controladores isolados um dos outros, falhas estruturais acarretam erros pontuais no sistema, o que não
comprometem a integridade do canal. Por outro lado, como seu funcionamento depende do correto manuseio
do caudal de admissão, as falhas por extrações de água não conhecidas acabam por causar problemas de
continuidade do canal, o que foi relatado como um comportamento “egoísta” desta arquitetura, onde foi
observado a descontinuidade de caudal dada uma amplitude de extração máxima.
Avaliando-se pontualmente cada controlador, o CLJ mostra-se mais adequado ao controle de nível, onde
apresenta maior precisão. Contudo, compreendendo-se o funcionamento completo do canal, dada a
necessidade de implementação manual do caudal de entrada no caso CLJ, entende-se que o CDM é um sistema
mais autônomo e mais versátil, dado, também, que a mudança entre os cenários não acarretava na variação dos
indicadores de desempenho.

58
Ambas as arquiteturas apresentam boas margens de economia de água ao longo dos testes, com pequena
vantagem para o CLJ. O consumo energético, entretanto, mostra-se díspar entre as arquiteturas, sendo o CDM,
em casos normais, mais vantajoso que o outro sistema. Entretanto, ambos os sistemas de controle apresentaram
os piores resultados nos testes onde ocorreu a saturação dos controladores, ou seja, conclui-se que, para a
implementação correcta de uma dada arquitetura, os limites de ação delas não devem ultrapassar a zona de
saturação.
Com os resultados, enfim, nota-se que cada controlador tem suas vantagens e desvantagens, sendo que para
cada projeto devem ser estudados os limites tanto do canal a ser desenvolvido tanto os controladores a serem
usados no mesmo, afim de se escolher a arquitetura mais propícia ao caso.
Conclui-se que o trabalho realizado corrobora com o projeto e avaliação de sistemas de transporte de água,
tanto para os sistemas novos quanto para a renovação de canais antigos, uma vez que apresenta o benchmark
necessário para a realização dos ensaios, aos quais os controladores devem ser submetidos e aprovados,
garantindo, assim, uma melhor implementação destes sistemas em casos reais.

59
7. Bibliografia
[1] Nabais, J. L., et al. “A multi-agent architecture for diagnosing simultaneous faults along water canals”, Control
Engineering Practice (2013), http://dx.doi.org/10.1016/j.conengprac.2013.08.015i
[2] Litrico, X. and Fromion, V. “Simplified Modeling of Irrigation Canals for Controller Design”, Journal of
Irrigation and Drainage Engineering (2004), Vol. 130, No. 5
[3] Ooi, S. K. and Weyer, E. “Control Design for an irrigation channel from physical data”, Control Engineering
Practice 16 (2008), pág. 1132–1150
[4] Litrico, X., et al. “Modelling and PI control of an irrigation canal”, European Control Conference (2003)
[5] Nabais, J. L., et al. “Flexible Framework for Modeling Water Conveyance Networks”, SIMULTECH (2011)
[6] Li, X., Park, J. and Shin, H. “Comparison and Evaluation of Anti-Windup PI Controllers”, Journal of Power
Electronics (2011)
[7] Bohn, C. and Atherton, D. P. “An analysis package comparing pid antiwindup strategies”, IEEE Systems
Magazine (1995)
[8] Ghoshal, A and John, V. “Anti-windup Schemes for Proportional Integral and Proportional Resonant
Controller”, National Power Electronic Conference (2010)
[9] Zhang, X. and Zhao, J. “L2-gain Analysis and Anti-windup Design of Discrete-time Switched Systems with
Actuator Saturation”, International Journal of Automation and Computing (2012)