controleerastreamentodereferênciade umservomotorqube ... · de transferência de sistemas...
TRANSCRIPT
Universidade Estadual de LondrinaCentro de Tecnologia e UrbanismoDepartamento de Engenharia Elétrica
Alisson Crinchev Mano
Controle e rastreamento de referência deum servomotor QUBE-Servo utilizando
Fórmula de Ackermann e LMI
Londrina2017
Universidade Estadual de Londrina
Centro de Tecnologia e UrbanismoDepartamento de Engenharia Elétrica
Alisson Crinchev Mano
Controle e rastreamento de referência de umservomotor QUBE-Servo utilizando Fórmula de
Ackermann e LMI
Trabalho de Conclusão de Curso orientado pelo Prof. Dr. MárcioRoberto Covacic intitulado “Controle e rastreamento de referênciade um servomotor QUBE-Servo utilizando Fórmula de Ackermanne LMI” e apresentado à Universidade Estadual de Londrina, comoparte dos requisitos necessários para a obtenção do Título de Ba-charel em Engenharia Elétrica.
Orientador: Prof. Dr. Márcio Roberto Covacic
Londrina2017
Ficha Catalográfica
Alisson Crinchev ManoControle e rastreamento de referência de um servomotor QUBE-Servo utili-zando Fórmula de Ackermann e LMI - Londrina, 2017 - 90 p., 30 cm.Orientador: Prof. Dr. Márcio Roberto Covacic1. Servomotor. 2. QUBE-Servo. 3. Ackermann. 4. LMIs.I. Universidade Estadual de Londrina. Curso de Engenharia Elétrica. II. Con-trole e rastreamento de referência de um servomotor QUBE-Servo utilizandoFórmula de Ackermann e LMI.
Alisson Crinchev Mano
Controle e rastreamento de referência deum servomotor QUBE-Servo utilizando
Fórmula de Ackermann e LMI
Trabalho de Conclusão de Curso apresentado ao Curso deEngenharia Elétrica da Universidade Estadual de Londrina,como requisito parcial para a obtenção do título de Bacharelem Engenharia Elétrica.
Comissão Examinadora
Prof. Dr. Márcio Roberto CovacicUniversidade Estadual de Londrina
Orientador
Prof. Dra. Silvia Galvão de SouzaCervantes
Universidade Estadual de Londrina
Prof. Me. Osni VicenteUniversidade Estadual de Londrina
Londrina, 20 de fevereiro de 2018

Agradecimentos
Agradeço primeiramente a Deus e a minha família por todo apoio e motivação durantetodos os momentos de minha graduação. Agradeço ao meu pai, José Mano, minha mãe,Neide e meu irmão, Ayeser.
Agradeço ao Departamento de Engenharia Elétrica da UEL (DEEL) por todo conhe-cimento que me foi concedido, especialmente ao professor Dr. Márcio Roberto Covacic,pela orientação durante este trabalho.
Agradeço aos professores responsáveis pelo Laboratório de Controle Avançado, Robó-tica e Engenharia Biomédica da UEL, pelo espaço concedido e por fornecer os materiaisnecessários para a realização do trabalho aqui presente.
Agradeço também aos funcionários do CTU, que sempre estiveram dispostos a ajudare auxiliar no que fosse preciso.
Por fim, agradeço aos amigos, especialmente as amizades que fiz durante a graduação,por estarem sempre presentes em todos os momentos.


Alisson Crinchev Mano. Controle e rastreamento de referência de um servomotorQUBE-Servo utilizando Fórmula de Ackermann e LMI. 2017. 90 p. Trabalhode Conclusão de Curso em Engenharia Elétrica - Universidade Estadual de Londrina,Londrina.
ResumoNeste trabalho, realizou-se o controle de um motor de corrente contínua QUBE-Servo,da Quanser, no qual o movimento do sistema descreve uma trajetória determinada ini-cialmente. Para tal, foi projetado o controlador em malha fechada, a partir das leis decontrole definidas pela fórmula de Ackermann, por Desigualdades Matriciais Lineares (eminglês, Linear Matrix Inequalities, LMIs) e por LMI considerando a taxa de decaimento,sendo possível obter uma matriz de ganho para cada controlador que controla de formaprecisa o sistema a ser estudado. Para a implementação e a análise dos controladores,primeiramente foi realizada uma simulação utilizando o software Simulink, a partir dafunção de transferência do sistema e da sua representação na forma de espaço de estados,para posteriormente ser projetado e implementado no sistema QUBE-Servo. O controlefoi feito analisando-se a posição angular do disco presente no QUBE-Servo, comparando-sea entrada aplicada (onda senoidal, quadrada e dente de serra) com a saída, sendo possívelcomprovar a eficiência dos controladores projetados, tanto na simulação quanto na im-plementação. Durante o procedimento foram utilizados os softwares MATLAB/Simulinkjunto ao QUARC, da Quanser.
Palavras-Chave: 1. Servomotor. 2. QUBE-Servo. 3. Ackermann. 4. LMIs.

Alisson Crinchev Mano. Control and reference tracking of a QUBE-Servo servo-motor using Ackermann Formula and LMI. 2017. 90 p. Monograph in ElectricalEngineering - Londrina State University, Londrina.
AbstractIn this project, a QUBE-Servo DC motor of Quanser was controlled, such that the move-ment of the system describes a determined trajectory initially. For this purpose, theclosed-loop controller was designed, based on control laws defined by Ackermann formula,by Linear Matrix Inequalities (LMIs) and by LMI considering the decay rate, so that itwas possible to obtain a gain matrix that precisely controls the system to be studied. Forthe implementation and analysis of the controller, a simulation was first performed usingSimulink software, from the system transfer function and its representation in state spaceform, to be later designed and implemented in the QUBE-Servo system. The controlwas done by analyzing the angular position of the disk present in the QUBE-Servo, com-paring the applied input (sine wave, square wave and sawtooth wave) with the output,being possible to prove the efficiency of the controller obtained, both in the simulationand implementation. During the procedure, the software MATLAB/Simulink was usedwith QUARC, from Quanser.
Key-words: 1. Servomotor. 2. QUBE-Servo. 3. Ackermann. 4. LMIs.
Lista de ilustrações
Figura 1 – Sistema de malha fechada . . . . . . . . . . . . . . . . . . . . . . . . . 20Figura 2 – Exemplo de erro em regime permanente . . . . . . . . . . . . . . . . . 22Figura 3 – Esquema de um motor de corrente contínua . . . . . . . . . . . . . . . 23Figura 4 – Diagrama de blocos de um motor CC controlado pela corrente de ar-
madura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Figura 5 – Circuito esquemático do QUBE-Servo . . . . . . . . . . . . . . . . . . . 26Figura 6 – QUBE-Servo com o disco de carga. . . . . . . . . . . . . . . . . . . . . 26Figura 7 – Sistema de segunda ordem. . . . . . . . . . . . . . . . . . . . . . . . . 28Figura 8 – Respostas de c(t) para diferentes valores de ζ (ωn = 1). . . . . . . . . . 30Figura 9 – Tempo de subida normalizado em função do coeficiente de amortecimento. 33Figura 10 – Região limitada pela taxa de decaimento. . . . . . . . . . . . . . . . . 38Figura 11 – Diagrama de blocos da simulação do sistema no Simulink. . . . . . . . 40Figura 12 – Diagrama de blocos da implementação do sistema no QUARC. . . . . . 41Figura 13 – Gráfico da entrada (degrau unitário) e saída da posição angular pela
fórmula de Ackermann. . . . . . . . . . . . . . . . . . . . . . . . . . . . 47Figura 14 – Gráfico da velocidade angular para a entrada de um degrau unitário
pela fórmula de Ackermann. . . . . . . . . . . . . . . . . . . . . . . . . 47Figura 15 – Gráfico da tensão para a entrada de um degrau unitário pela fórmula
de Ackermann. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48Figura 16 – Gráfico da entrada e saída (com o ponto de máximo marcado) da po-
sição angular. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Figura 17 – Gráfico da entrada e saída (com o ponto onde ocorre o tempo de aco-
modação marcado) da posição angular. . . . . . . . . . . . . . . . . . . 49Figura 18 – Gráfico da entrada e saída (com os pontos que definem o tempo de
subida marcados) da posição angular. . . . . . . . . . . . . . . . . . . . 50Figura 19 – Gráfico da entrada (senoide) e saída da posição angular pela fórmula
de Ackermann. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50Figura 20 – Gráfico da velocidade angular para entrada de um sinal senoidal pela
fórmula de Ackermann. . . . . . . . . . . . . . . . . . . . . . . . . . . . 51Figura 21 – Gráfico da tensão para entrada de um sinal senoidal pela fórmula de
Ackermann. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51Figura 22 – Gráfico da entrada (onda quadrada) e saída da posição angular pela
fórmula de Ackermann. . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Figura 23 – Gráfico da velocidade angular para entrada de um sinal de uma ondaquadrada pela fórmula de Ackermann. . . . . . . . . . . . . . . . . . . 52
Figura 24 – Gráfico da tensão para entrada de um sinal de uma onda quadrada pelafórmula de Ackermann. . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Figura 25 – Gráfico da entrada (onda dente de serra) e saída da posição angularpela fórmula de Ackermann. . . . . . . . . . . . . . . . . . . . . . . . . 53
Figura 26 – Gráfico da velocidade angular para entrada de um sinal dente de serrapela fórmula de Ackermann. . . . . . . . . . . . . . . . . . . . . . . . . 54
Figura 27 – Gráfico da tensão para entrada de um sinal dente de serra pela fórmulade Ackermann. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Figura 28 – Gráfico da entrada (onda senoidal) e saída da posição angular pelafórmula de Ackermann implementado no QUBE-Servo. . . . . . . . . . 55
Figura 29 – Gráfico da velocidade angular para entrada de um sinal senoidal pelafórmula de Ackermann implementado no QUBE-Servo. . . . . . . . . . 56
Figura 30 – Gráfico da tensão para entrada de um sinal senoidal pela fórmula deAckermann implementado no QUBE-Servo. . . . . . . . . . . . . . . . 56
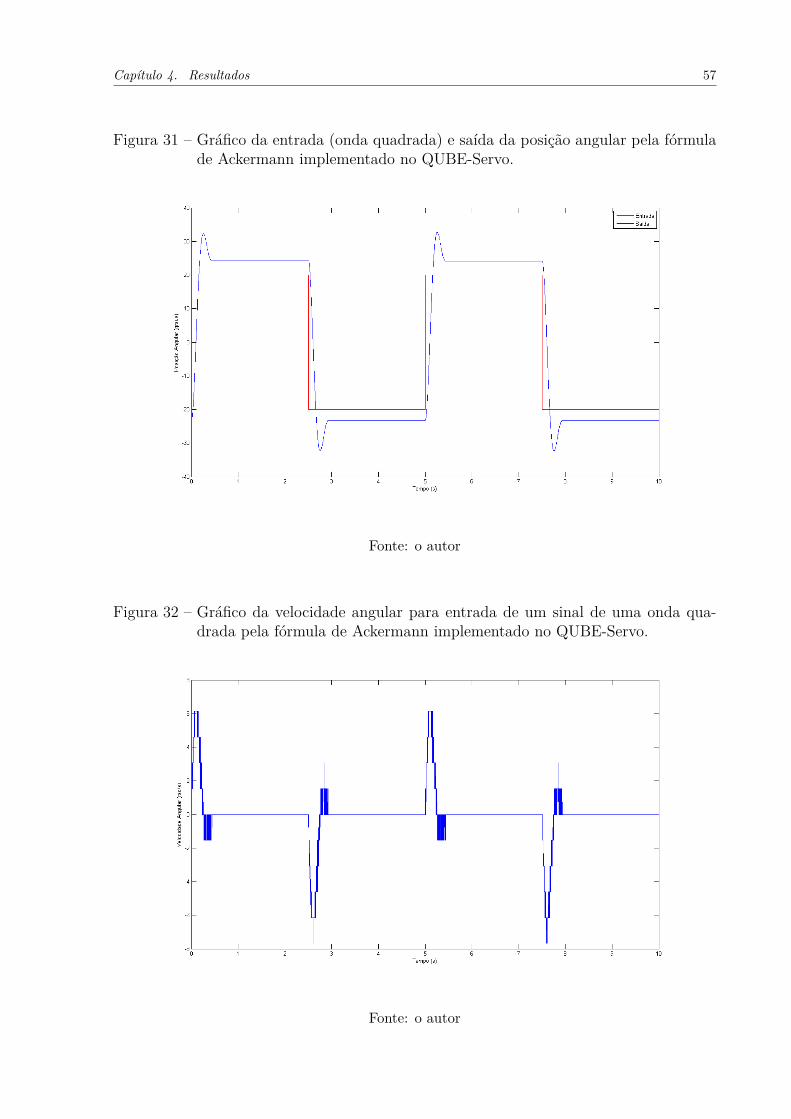
Figura 31 – Gráfico da entrada (onda quadrada) e saída da posição angular pelafórmula de Ackermann implementado no QUBE-Servo. . . . . . . . . . 57
Figura 32 – Gráfico da velocidade angular para entrada de um sinal de uma ondaquadrada pela fórmula de Ackermann implementado no QUBE-Servo. . 57
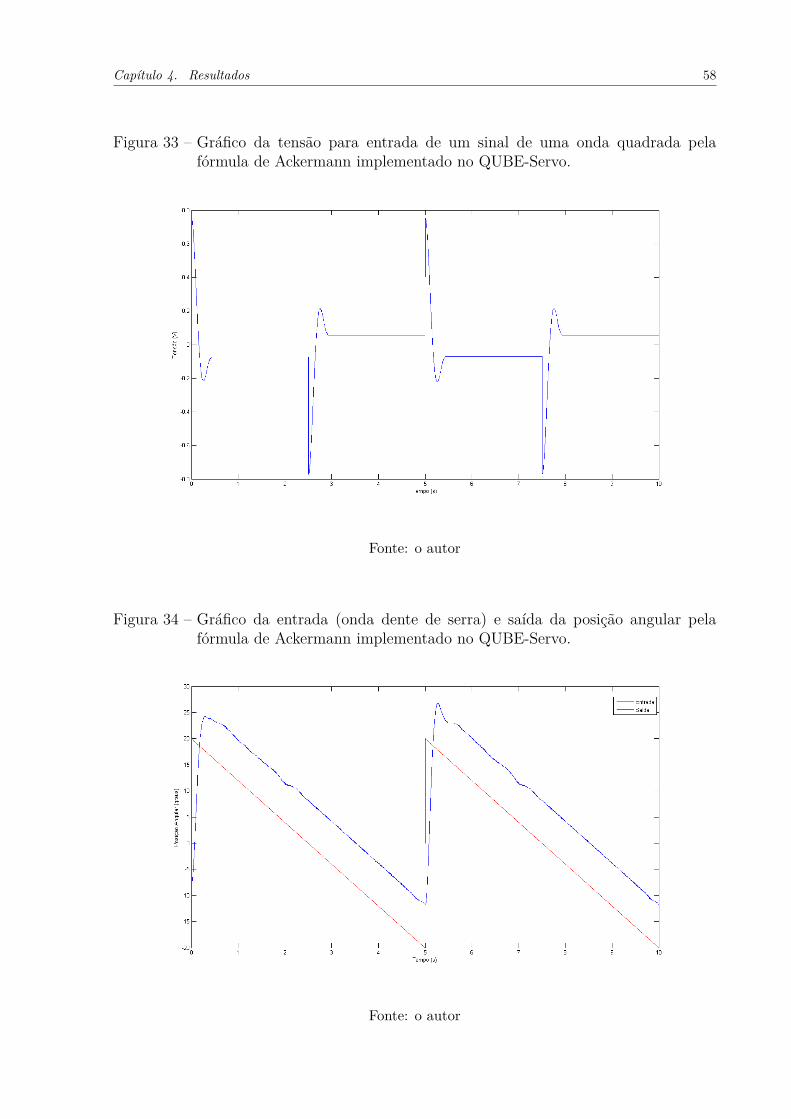
Figura 33 – Gráfico da tensão para entrada de um sinal de uma onda quadrada pelafórmula de Ackermann implementado no QUBE-Servo. . . . . . . . . . 58
Figura 34 – Gráfico da entrada (onda dente de serra) e saída da posição angularpela fórmula de Ackermann implementado no QUBE-Servo. . . . . . . 58
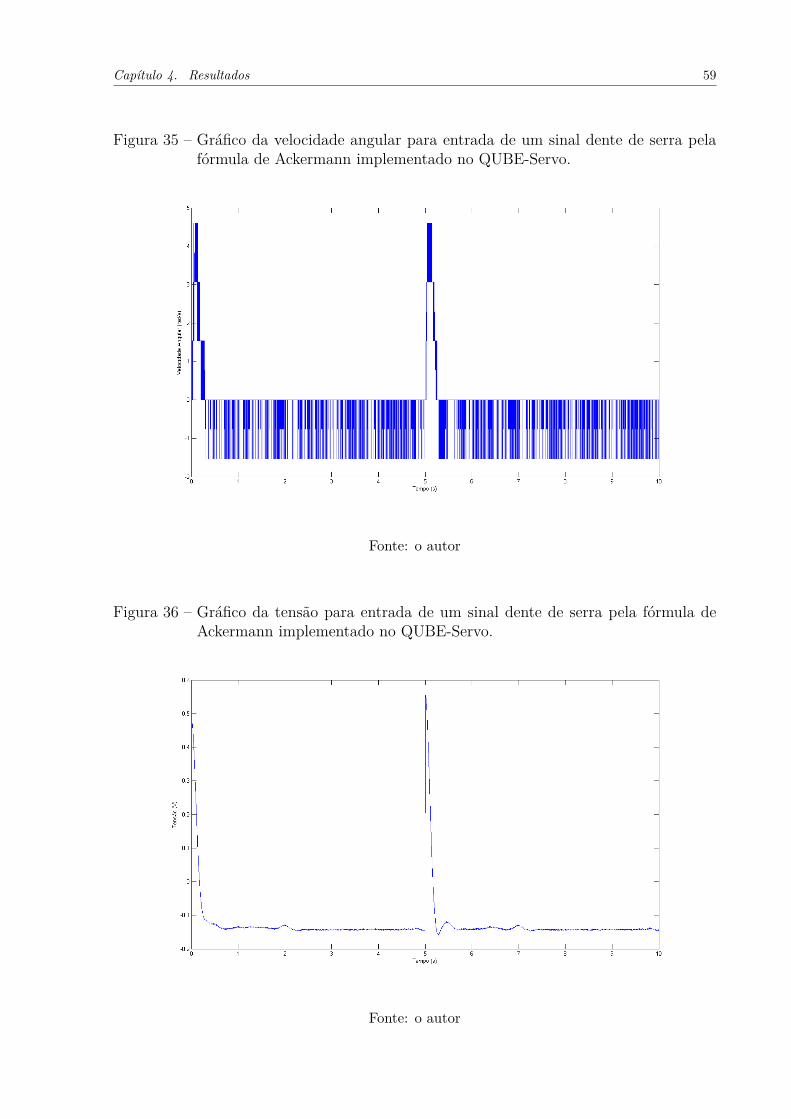
Figura 35 – Gráfico da velocidade angular para entrada de um sinal dente de serrapela fórmula de Ackermann implementado no QUBE-Servo. . . . . . . 59
Figura 36 – Gráfico da tensão para entrada de um sinal dente de serra pela fórmulade Ackermann implementado no QUBE-Servo. . . . . . . . . . . . . . . 59
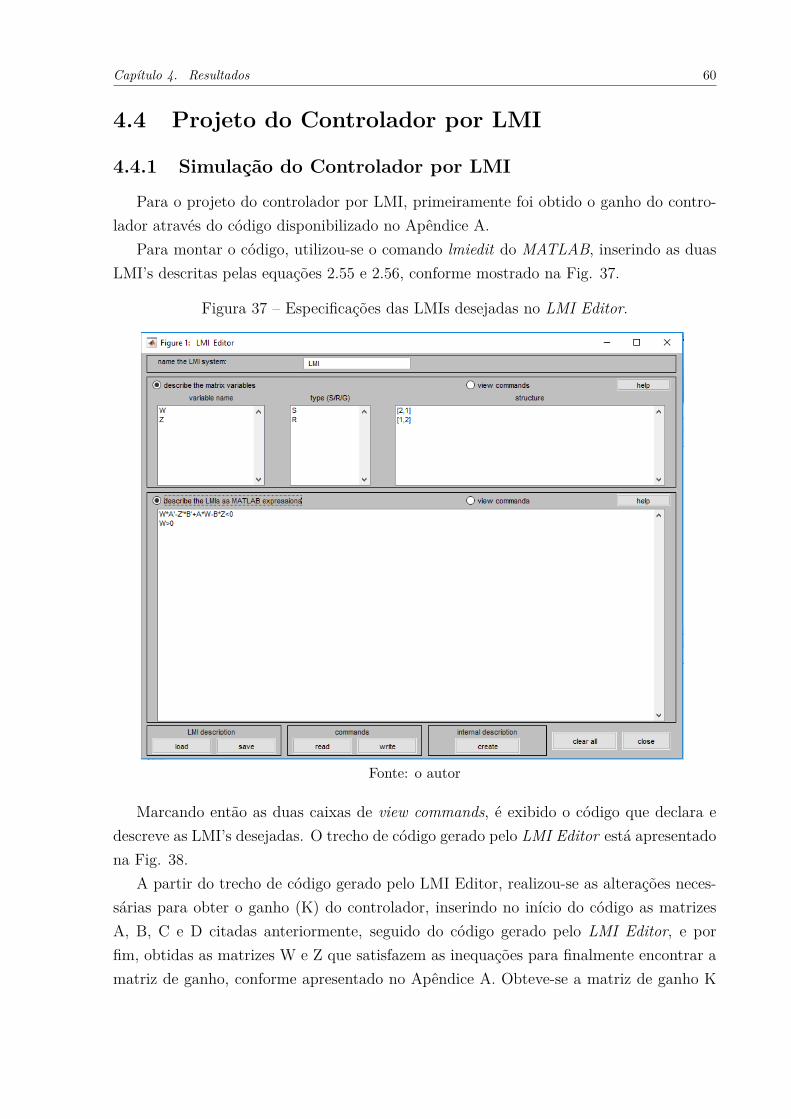
Figura 37 – Especificações das LMIs desejadas no LMI Editor. . . . . . . . . . . . . 60Figura 38 – Código gerado pelo LMI Editor. . . . . . . . . . . . . . . . . . . . . . . 61Figura 39 – Gráfico da entrada (degrau unitário) e saída da posição angular por LMI. 62Figura 40 – Gráfico da velocidade angular para a entrada de um degrau unitário
por LMI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62Figura 41 – Gráfico da tensão para a entrada de um degrau unitário por LMI. . . . 63Figura 42 – Gráfico da entrada (onda quadrada) e saída (não sendo estabilizada)
da posição angular por LMI. . . . . . . . . . . . . . . . . . . . . . . . . 63Figura 43 – Gráfico da entrada (senoide) e saída da posição angular por LMI. . . . 64Figura 44 – Gráfico da velocidade angular para entrada de um sinal senoidal por
LMI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
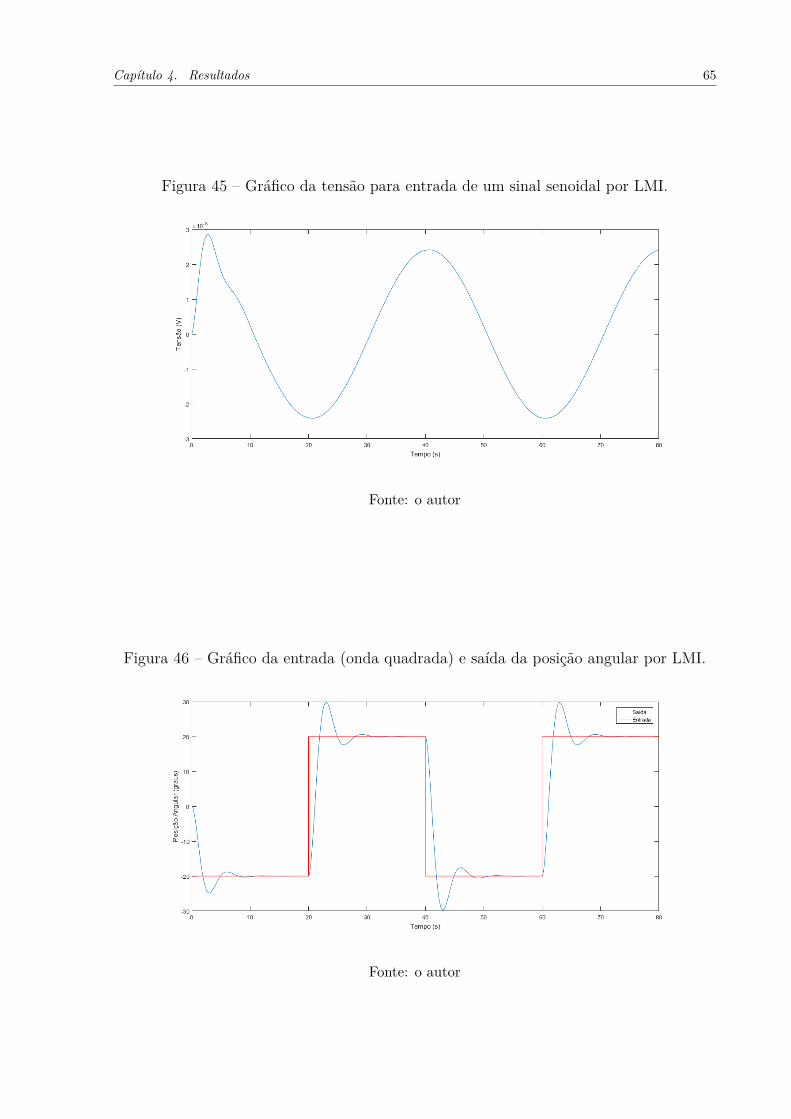
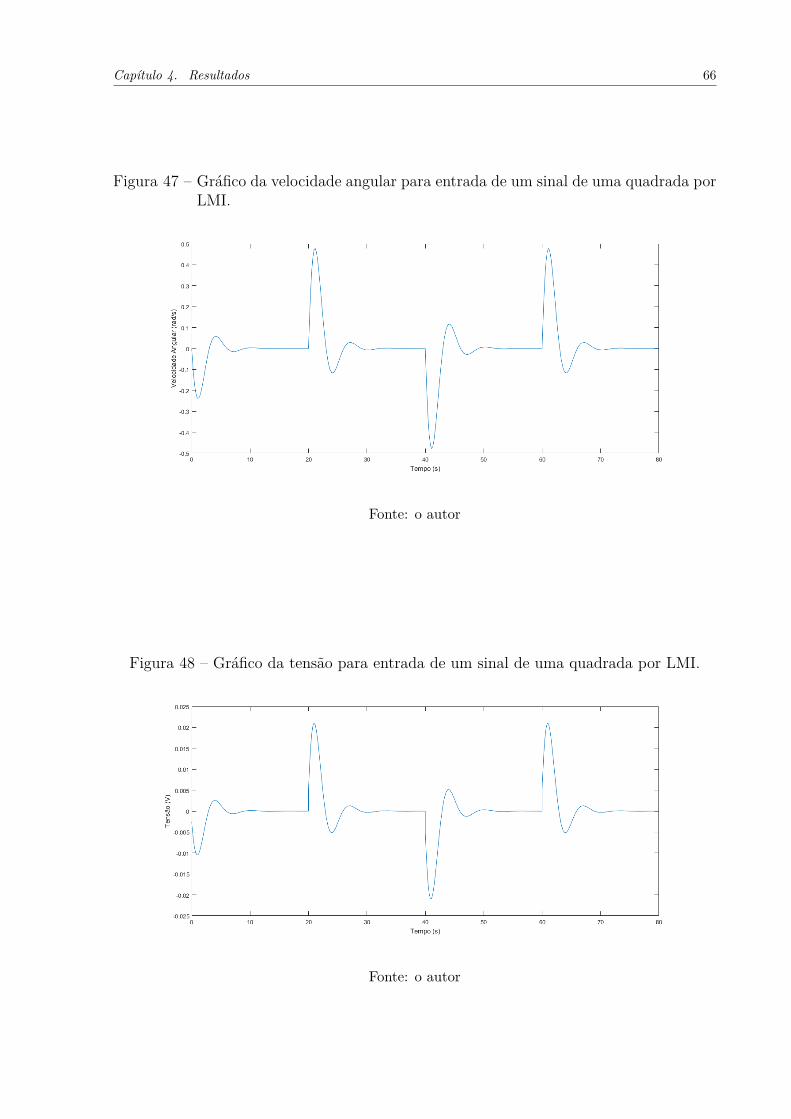
Figura 45 – Gráfico da tensão para entrada de um sinal senoidal por LMI. . . . . . 65Figura 46 – Gráfico da entrada (onda quadrada) e saída da posição angular por LMI. 65Figura 47 – Gráfico da velocidade angular para entrada de um sinal de uma qua-
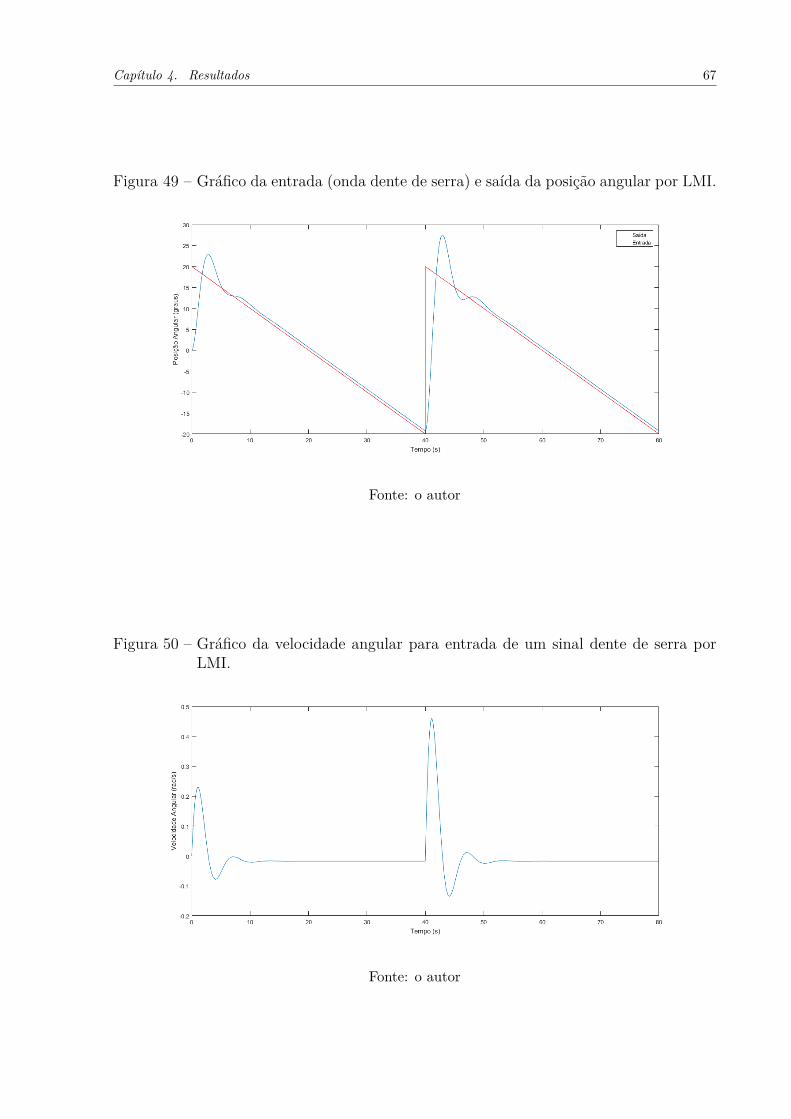
drada por LMI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66Figura 48 – Gráfico da tensão para entrada de um sinal de uma quadrada por LMI. 66Figura 49 – Gráfico da entrada (onda dente de serra) e saída da posição angular
por LMI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Figura 50 – Gráfico da velocidade angular para entrada de um sinal dente de serra
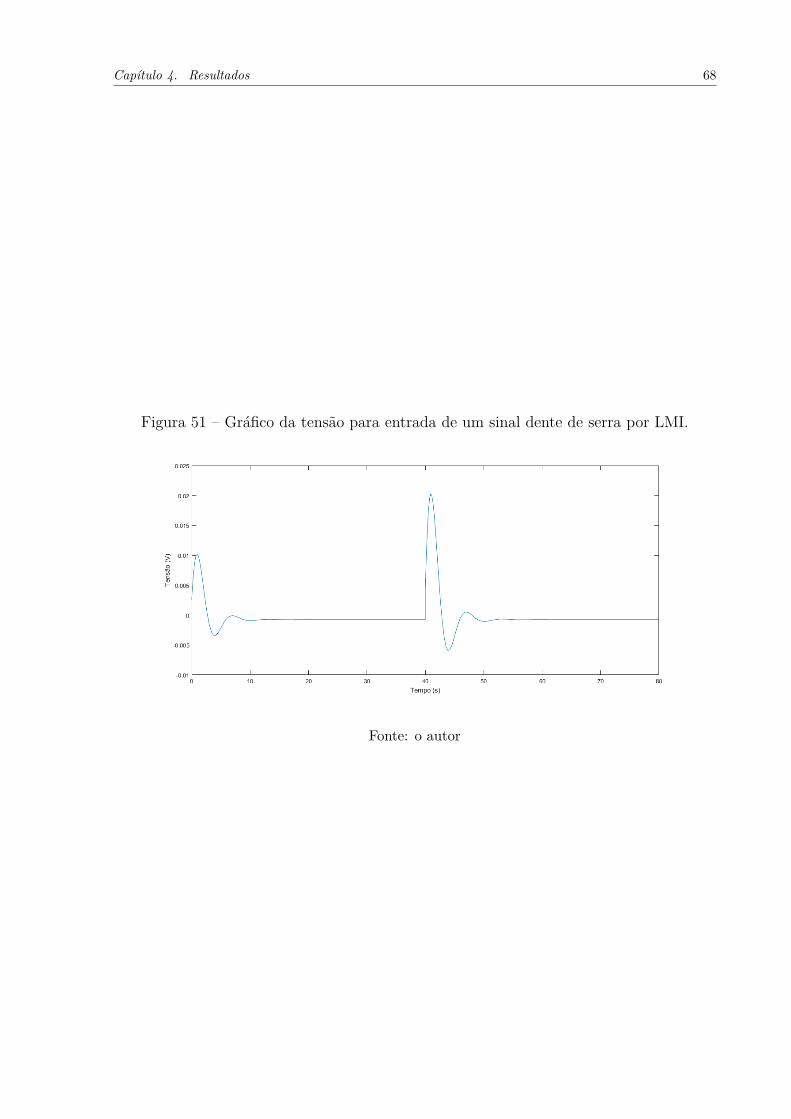
por LMI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Figura 51 – Gráfico da tensão para entrada de um sinal dente de serra por LMI. . . 68Figura 52 – Especificações das LMIs desejadas no LMI Editor. . . . . . . . . . . . . 70Figura 53 – Código gerado pelo LMI Editor. . . . . . . . . . . . . . . . . . . . . . . 71Figura 54 – Gráfico da entrada (degrau unitário) e saídas das posições angulares
para diferentes taxas de decaimento. . . . . . . . . . . . . . . . . . . . 71Figura 55 – Gráfico da velocidade angular para a entrada de um degrau unitário
para diferentes taxas de decaimento. . . . . . . . . . . . . . . . . . . . 72Figura 56 – Gráfico da tensão para a entrada de um degrau unitário para diferentes
taxas de decaimento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72Figura 57 – Gráfico da entrada (senoide) e saídas das posições angulares para dife-
rentes taxas de decaimento. . . . . . . . . . . . . . . . . . . . . . . . . 73Figura 58 – Gráfico das velocidades angulares para entrada de um sinal senoidal
para diferentes taxas de decaimento. . . . . . . . . . . . . . . . . . . . 73Figura 59 – Gráfico das tensões para entrada de um sinal senoidal para diferentes
taxas de decaimento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74Figura 60 – Gráfico da entrada (onda quadrada) e saídas das posições angulares
para diferentes taxas de decaimento. . . . . . . . . . . . . . . . . . . . 74Figura 61 – Gráfico das velocidades angulares para entrada de um sinal de uma
quadrada para diferentes taxas de decaimento. . . . . . . . . . . . . . . 75Figura 62 – Gráfico das tensões para entrada de um sinal de uma onda quadrada
para diferentes taxas de decaimento. . . . . . . . . . . . . . . . . . . . 75Figura 63 – Gráfico da entrada (onda dente de serra) e saídas das posições angulares
para diferentes taxas de decaimento. . . . . . . . . . . . . . . . . . . . 76Figura 64 – Gráfico das velocidades angulares para entrada de um sinal dente de
serra para diferentes taxas de decaimento. . . . . . . . . . . . . . . . . 76Figura 65 – Gráfico das tensões para entrada de um sinal dente de serra para dife-
rentes taxas de decaimento. . . . . . . . . . . . . . . . . . . . . . . . . 77Figura 66 – Gráfico da entrada (onda quadrada) e saída da posição angular para
um γ = 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Figura 67 – Gráfico da entrada (onda senoidal) e saída da posição angular para umγ = 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Figura 68 – Gráfico da entrada (onda quadrada) e saída da posição angular paraum γ = 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Figura 69 – Gráfico da entrada (onda dente de serra) e saída da posição angularpara um γ = 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Figura 70 – Gráfico da entrada (onda senoidal) e saída da posição angular para umγ = 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Figura 71 – Gráfico da entrada (onda quadrada) e saída da posição angular paraum γ = 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Figura 72 – Gráfico da entrada (onda dente de serra) e saída da posição angularpara um γ = 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Figura 73 – Gráfico da entrada (onda senoidal) e saída da posição angular para umγ = 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Figura 74 – Gráfico da entrada (onda quadrada) e saída da posição angular paraum γ = 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Figura 75 – Gráfico da entrada (onda dente de serra) e saída da posição angularpara um γ = 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Figura 76 – Gráfico da entrada (onda senoidal) e saída da posição angular para umγ = 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Figura 77 – Gráfico da entrada (onda quadrada) e saída da posição angular paraum γ = 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Figura 78 – Gráfico da entrada (onda dente de serra) e saída da posição angularpara um γ = 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Figura 79 – Gráfico da tensão para entrada de um sinal de uma onda quadradapara um γ = 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Figura 80 – Gráfico da tensão para entrada de um sinal de uma onda dente de serrapara um γ = 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85

Lista de tabelas
Tabela 1 – Erro em função do tipo do sistema . . . . . . . . . . . . . . . . . . . . 22Tabela 2 – Alguns parâmetros do QUBE-Servo. . . . . . . . . . . . . . . . . . . . 26Tabela 3 – Alguns pares de transformada de Laplace . . . . . . . . . . . . . . . . 29Tabela 4 – Valores de diferentes fatores de amortecimento com seus respectivos
tempos de subida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Lista de Siglas e Abreviaturas
CC Corrente contínuaLMI Linear Matrix Inequalities (Desigualdades Matriciais Lineares)USB Universal Serial Bus (Porta universal)Vel. Velocidade
Sumário
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.1 Contextualização . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.2.1 Objetivos Gerais . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.2.2 Objetivos Específicos . . . . . . . . . . . . . . . . . . . . . . . . . . 181.3 Estrutura do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . 18
2 FUNDAMENTAÇÃO TEÓRICA . . . . . . . . . . . . . . . . . 202.1 Controle por Malha Fechada . . . . . . . . . . . . . . . . . . . . . 202.1.1 Rastreamento de Referência . . . . . . . . . . . . . . . . . . . . . 202.1.2 Erro em regime permanente . . . . . . . . . . . . . . . . . . . . . 212.2 Função de Transferência de Sistemas Lineares . . . . . . . . . . 222.2.1 Função de Transferência de um Motor CC controlado pela
Armadura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.3 QUBE-Servo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.4 Representação no Espaço de Estados . . . . . . . . . . . . . . . . 272.5 Sistemas de Segunda Ordem . . . . . . . . . . . . . . . . . . . . . 272.5.1 Sistemas de Segunda Ordem Subamortecidos . . . . . . . . . . 282.5.1.1 Instante de Pico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.5.1.2 Sobre-sinal Máximo . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.5.1.3 Tempo de Acomodação . . . . . . . . . . . . . . . . . . . . . . . . . 312.5.1.4 Tempo de Subida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.6 Controlabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.7 Fórmula de Ackermann . . . . . . . . . . . . . . . . . . . . . . . . 332.8 LMI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.8.1 Breve História sobre as LMIs . . . . . . . . . . . . . . . . . . . . 342.8.2 Estabilidade de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . 352.8.3 Controlador Baseado em LMI para Sistemas em Malha Fechada 352.8.4 Controlador Baseado em LMI para Sistemas em Malha Fe-
chada Considerando Taxa de Decaimento . . . . . . . . . . . . . 37
3 DESENVOLVIMENTO . . . . . . . . . . . . . . . . . . . . . . . 393.1 Materiais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393.2 Representação em Espaço de Estados . . . . . . . . . . . . . . . 393.3 Verificação da Controlabilidade do Sistema . . . . . . . . . . . . 39
3.4 Projeto do Controlador pela Fórmula de Ackermann . . . . . . 393.5 Projeto do Controlador por LMI . . . . . . . . . . . . . . . . . . 41
4 RESULTADOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.1 Representação em Espaço de Estados . . . . . . . . . . . . . . . 434.2 Verificação da Controlabilidade do Sistema . . . . . . . . . . . . 444.3 Projeto do Controlador pela Fórmula de Ackermann . . . . . . 454.3.1 Simulação do Controlador pela Fórmula de Ackermann . . . . 454.3.2 Implementação do Controlador pela Fórmula de Ackermann
no QUBE-Servo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.4 Projeto do Controlador por LMI . . . . . . . . . . . . . . . . . . 604.4.1 Simulação do Controlador por LMI . . . . . . . . . . . . . . . . 604.4.2 Implementação do Controlador por LMI no QUBE-Servo . . . 694.4.3 Simulação do Controlador por LMI considerando a Taxa de
Decaimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 694.4.4 Implementação do Controlador por LMI considerando a Taxa
de Decaimento no QUBE-Servo . . . . . . . . . . . . . . . . . . . 78
5 DISCUSSÕES E CONCLUSÕES . . . . . . . . . . . . . . . . . 865.1 Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
REFERÊNCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
A APÊNDICE: CÓDIGO PARA O CÁLCULO DO CONTRO-LADOR BASEADO EM LMI . . . . . . . . . . . . . . . . . . . 89
B APÊNDICE: CÓDIGO PARA O CÁLCULO DO CONTRO-LADOR BASEADO EM LMI CONSIDERANDO-SE A TAXADE DECAIMENTO . . . . . . . . . . . . . . . . . . . . . . . . . 90

17
1 Introdução
1.1 Contextualização
Atualmente, as teorias de controle contribuem para o progresso tecnológico em diversasáreas. O controle automático tem desempenhado um papel essencial para o avanço daengenharia e da ciência, apresentando grande importância tanto em sistemas simples, porexemplo, o controle da temperatura de uma geladeira, quanto em sistemas sofisticados,por exemplo, aplicações em veículos espaciais e sistemas robóticos (OGATA, 2003). Comoos sistemas automatizados estão cada vez mais presentes, torna-se necessário cada vezmais expandir os conhecimentos na área de controle e automação industrial, visandoobter melhorias e melhores performances dos sistemas automatizados. Sabendo dessaimportância, o estudo dessas teorias se tornam necessárias e de extrema importância paraa formação do engenheiro eletricista.
Os motores de corrente contínua estão presentes em uma grande variedade de apli-cações em nosso cotidiano, seja em aplicações simples, como um brinquedo infantil, porexemplo, ou em sistemas mais complexos, como acionamento de portas, robôs, braçosmecânicos entre outras diversas aplicações automatizadas.
Esses processos industriais necessitam operar com controle de posição e de velocidade.Dentre os tipos de motores, os motores de corrente contínua destacam-se pela simplicidadeem controlar sua velocidade de rotação e o torque (FUENTES, 2005). Os motores decorrente alternada necessitam de variação de frequência para mudar sua velocidade derotação, já os motores CC necessitam apenas da variação de tensão para realizar essecontrole, tendo sua aplicação simplificada nesse quesito.
Para a realização trabalho aqui presente, foi utilizado o servomotor QUBE-Servo daQuanser, que é sistema servo rotativo de acionamento direto, conectado a um computadorvia USB, com um motor CC e um amplificador internamente integrado, permitindo assimutilizar as teorias de controle no controle de posição de um disco de inércia (APKARIAN;LEVIS, 2013).
Embora o QUBE-Servo da Quanser seja um modelo didático que utiliza um motorde baixa potência, é possível expandir os estudos aqui apresentados para sistemas quenecessitam controlar a posição do eixo do motor, seja ele de baixa ou alta potência,mostrando-se uma maneira simples e eficaz de realizar a implementação de forma práticadas teorias de controle até então conhecidas.
Capítulo 1. Introdução 18
1.2 Objetivos
1.2.1 Objetivos Gerais
Os objetivos gerais deste trabalho, envolvem o estudo sobre teorias de controle paracontrolar a posição de um disco de inércia ligado a um servomotor QUBE-Servo, de modoque seu movimento acompanhe uma trajetória determinada, utilizando os métodos defórmula de Ackermann e LMIs.
1.2.2 Objetivos Específicos
• Estudo sobre a modelagem de um motor CC;
• Estudo sobre sistemas de segunda ordem;
• Estudo das teorias de controle, especialmente Fórmula de Ackermann e LMIs;
• Projeto dos controladores;
• Simulação dos controladores via Simulink;
• Implementação dos controladores no QUBE-Servo;
• Verificação dos resultados simulados do sistema com a implementação no QUBE-Servo.
1.3 Estrutura do Trabalho
O trabalho aqui presente está dividido em 5 capítulos. Este primeiro capítulo apresentauma introdução do trabalho, contextualizando o problema e apresentando os objetivosgerais e específicos.
No capítulo 2 está apresentado a fundamentação teórica, contendo os principais te-mas para o desenvolvimento do trabalho, tais como, controle por malha fechada, funçãode transferência de sistemas lineares, informações sobre o QUBE-Servo, representaçãono espaço de estados, sistemas de segunda ordem, controlabilidade e os conceitos doscontroladores estudados, Ackermann e LMIs.
O capítulo 3 apresenta o desenvolvimento do trabalho, ou seja, mostra a metodologiaque foi utilizada, os materiais utilizados e a forma como cada etapa foi realizada.
No capítulo 4 está apresentado os resultados, contendo a representação em espaço deestados do sistema, a verificação da controlabilidade do mesmo, projeto dos controladorese os resultados tanto das simulações quanto das implementações dos controladores noQUBE-Servo.
Capítulo 1. Introdução 19
No capítulo 5, são apresentadas as discussões e conclusões do trabalho, e tambémsugestões de trabalhos futuros.
20
2 Fundamentação Teórica
2.1 Controle por Malha Fechada
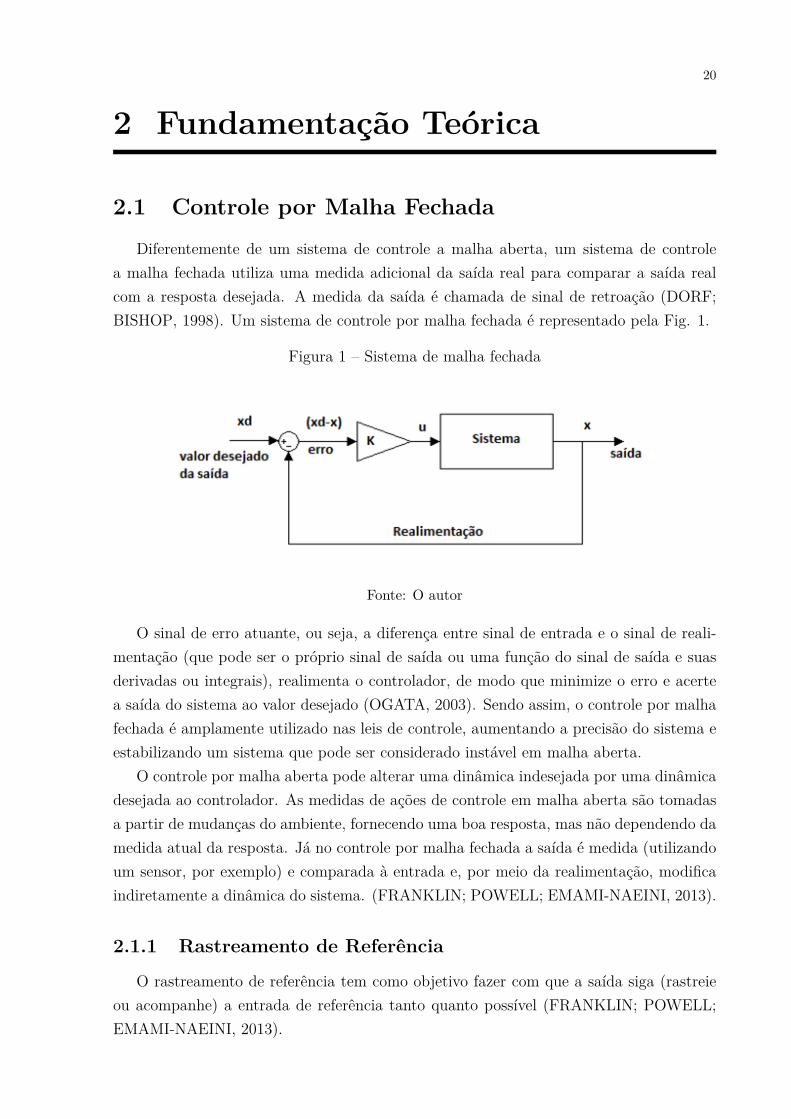
Diferentemente de um sistema de controle a malha aberta, um sistema de controlea malha fechada utiliza uma medida adicional da saída real para comparar a saída realcom a resposta desejada. A medida da saída é chamada de sinal de retroação (DORF;BISHOP, 1998). Um sistema de controle por malha fechada é representado pela Fig. 1.
Figura 1 – Sistema de malha fechada
Fonte: O autor
O sinal de erro atuante, ou seja, a diferença entre sinal de entrada e o sinal de reali-mentação (que pode ser o próprio sinal de saída ou uma função do sinal de saída e suasderivadas ou integrais), realimenta o controlador, de modo que minimize o erro e acertea saída do sistema ao valor desejado (OGATA, 2003). Sendo assim, o controle por malhafechada é amplamente utilizado nas leis de controle, aumentando a precisão do sistema eestabilizando um sistema que pode ser considerado instável em malha aberta.
O controle por malha aberta pode alterar uma dinâmica indesejada por uma dinâmicadesejada ao controlador. As medidas de ações de controle em malha aberta são tomadasa partir de mudanças do ambiente, fornecendo uma boa resposta, mas não dependendo damedida atual da resposta. Já no controle por malha fechada a saída é medida (utilizandoum sensor, por exemplo) e comparada à entrada e, por meio da realimentação, modificaindiretamente a dinâmica do sistema. (FRANKLIN; POWELL; EMAMI-NAEINI, 2013).
2.1.1 Rastreamento de Referência
O rastreamento de referência tem como objetivo fazer com que a saída siga (rastreieou acompanhe) a entrada de referência tanto quanto possível (FRANKLIN; POWELL;EMAMI-NAEINI, 2013).
Capítulo 2. Fundamentação Teórica 21
A referência tipicamente irá variar em degrau, ou seja, a saída deverá ir de um valorcontante para outro valor também constante. No entanto, esse sinal de referência podeser uma rampa, senoide, dente de serra, entre outras, mas se o sistema não for capaz derastrear um degrau, não será capaz de rastrear outras referências.
Utilizando o critério de estabilidade de Lyapunov (que será abordado mais adianteneste trabalho), pode-se garantir o rastreamento de referência do motor a ser estudado(RAHMAN et al., 2003).
2.1.2 Erro em regime permanente
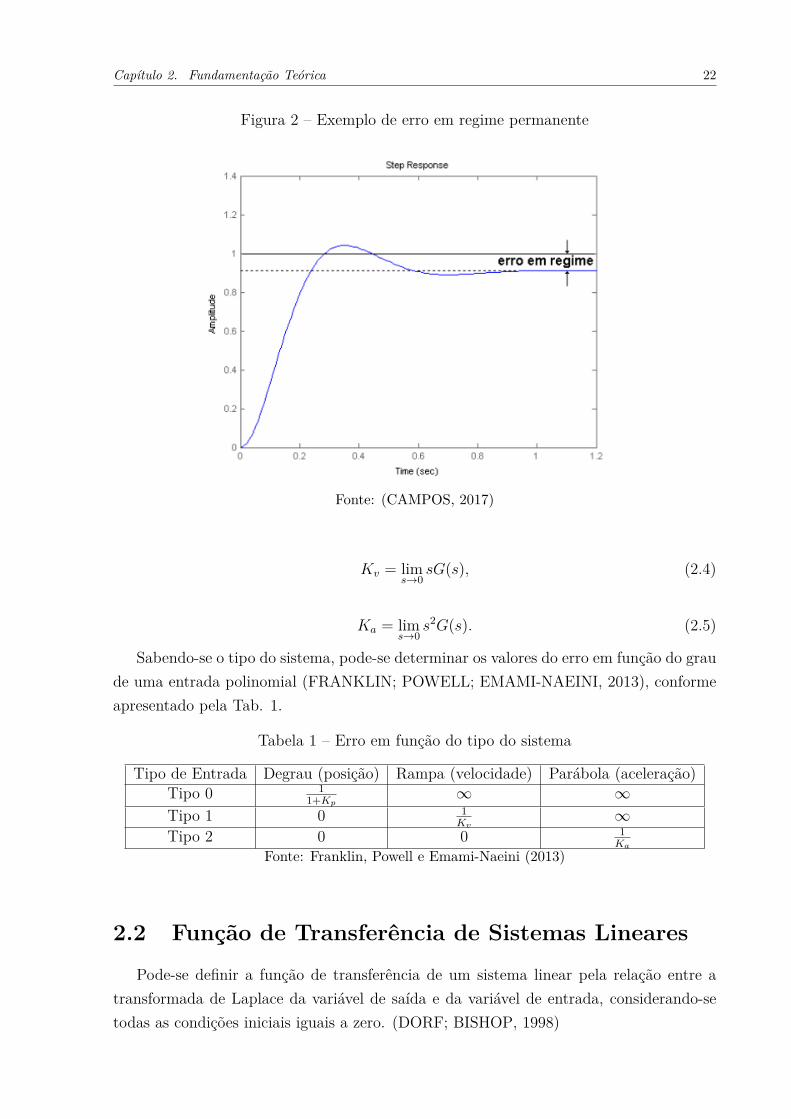
Ao se utilizar um sistema de controle, um dos principais objetivos é que a saída de umcerto sistema siga o sinal de referência, em regime permanente. A diferenca entre o sinalde saída e o sinal de referência é definido como erro em regime permanente (CAMPOS,2017).
Para um sistema em malha fechada conforme apresentado na Fig. 1, o erro de malhafechada (E(s)) é definido como:
E(s) = R(s)1 +G(s) , (2.1)
sendo R(s) o sinal de entrada e G(s) a planta do sistema.Utiizando o teorema do valor final pode-se determinar o erro de regime permanente:
limt→∞
e(t) = lims→0
sE(s). (2.2)
Para um sistema em malha fechada o erro em regime permanente depende da funçãode transferência em malha aberta e do sinal de referência, sendo o degrau, a rampa e aparábola as entradas mais comuns (CAMPOS, 2017).
A Fig. 2 a seguir apresenta um exemplo de erro em regime permanente para a refe-rência de um degrau unitário.
Para definir as constantes de erro, deve-se observar o grau dos sinais de referência. Se aentrada é de grau zero, como um degrau ou posição, a constante é chamada de constantede posição e é definida por Kp e o sistema classificado como Tipo 0. Se a entrada éuma função do primeiro grau, como uma rampa ou entrada de velocidade, a constanteé chamada de constante de velocidade definida como Kv e o sistema classificado comoTipo 1. Para um sistema Tipo 2 o sinal de entrada é uma parábola unitária e a constanteé chamada de constante de velocidade (Ka) (FRANKLIN; POWELL; EMAMI-NAEINI,2013). Matematicamente:
Kp = lims→0
G(s), (2.3)
Capítulo 2. Fundamentação Teórica 22
Figura 2 – Exemplo de erro em regime permanente
Fonte: (CAMPOS, 2017)
Kv = lims→0
sG(s), (2.4)
Ka = lims→0
s2G(s). (2.5)
Sabendo-se o tipo do sistema, pode-se determinar os valores do erro em função do graude uma entrada polinomial (FRANKLIN; POWELL; EMAMI-NAEINI, 2013), conformeapresentado pela Tab. 1.
Tabela 1 – Erro em função do tipo do sistema
Tipo de Entrada Degrau (posição) Rampa (velocidade) Parábola (aceleração)Tipo 0 1
1+Kp ∞ ∞Tipo 1 0 1
Kv∞
Tipo 2 0 0 1Ka
Fonte: Franklin, Powell e Emami-Naeini (2013)
2.2 Função de Transferência de Sistemas Lineares
Pode-se definir a função de transferência de um sistema linear pela relação entre atransformada de Laplace da variável de saída e da variável de entrada, considerando-setodas as condições iniciais iguais a zero. (DORF; BISHOP, 1998)
Capítulo 2. Fundamentação Teórica 23
A função de transferência é determinada somente para sistemas lineares e estacio-nários. Já os sistemas não-estacionários (sistema variante no tempo) possuem um oumais parâmetros variáveis no tempo, não sendo possível então aplicar a transformada deLaplace nesses sistemas.
De forma genérica, a função de transferência é definida como apresentado na Eq. 2.6:
G(s) = L[entrada]L[saída] , (2.6)
considerando as condições iniciais nulas, pode-se representar a dinâmica de um sistemainvariante no tempo em “s”.
2.2.1 Função de Transferência de um Motor CC controlado pelaArmadura
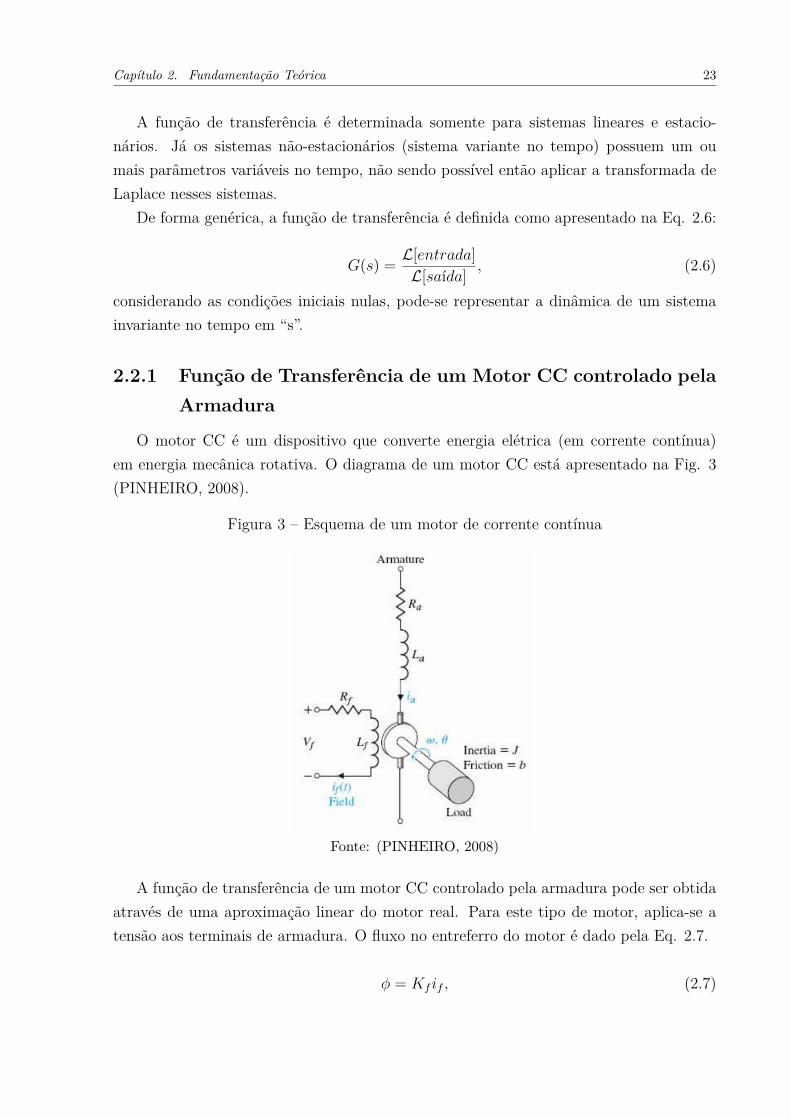
O motor CC é um dispositivo que converte energia elétrica (em corrente contínua)em energia mecânica rotativa. O diagrama de um motor CC está apresentado na Fig. 3(PINHEIRO, 2008).
Figura 3 – Esquema de um motor de corrente contínua
Fonte: (PINHEIRO, 2008)
A função de transferência de um motor CC controlado pela armadura pode ser obtidaatravés de uma aproximação linear do motor real. Para este tipo de motor, aplica-se atensão aos terminais de armadura. O fluxo no entreferro do motor é dado pela Eq. 2.7.
φ = Kf if , (2.7)

Capítulo 2. Fundamentação Teórica 24
sendo Kf e if a constante e a corrente de campo respectivamente. O torque no motor édado pela Eq. 2.8, estando linearmente relacionado a φ e à corrente de armadura (ia).
tm(t) = K1φia(t) = K1Kf if (t)ia(t). (2.8)
A partir da Eq. 2.8, nota-se que para haver um elemento linear uma das correntesdeve ser mantida constante enquanto a outra se torna a corrente de entrada. Para o casodo motor controlado pela armadura, a corrente de campo é constante e consequentementeo torque no motor é dado pela Eq. 2.9, já em notação de transformada de Laplace.
Tm(s) = (K1KfIf )Ia(s) = KmIa(s), (2.9)
sendo Km = (K1KfIf ) a constante do motor.Através da lei das tensões de Kirchhoff é possível obter a expressão que relaciona a
corrente de armadura com a tensão aplicada à armadura, conforme apresentado na Eq.2.10.
Va(s) = (Ra + Las)Ia(s) + Vb(s), (2.10)
onde Ra é a resistência de armadura, La a indutância de armadura e Vb(s) a tensão nomotor. Como a tensão aplicada no motor é proporcional à velocidade do mesmo, tem-sepor conseguinte a Eq. 2.11
Vb(s) = Kbω(s). (2.11)
Na Eq. 2.11 Kb é a constante da tensão induzida e ω(s) a velocidade angular do eixodo motor.
A corrente de armadura é definida pela Eq. 2.12.
Ia(s) = Va(s)−Kbω(s)(Ra + Las)
. (2.12)
O torque motor Tm(s) é igual à soma do torque na carga (TL) com o torque perturbador(Td(s)), quase sempre desprezível, devendo ser considerado em sistemas sujeitos a forçasexternas. O torque na carga para inércias em rotação é definido pela Eq. 2.13.
TL(s) = Js2θ(s) + bsθ(s) = Tm(s)− Td(s), (2.13)
sendo J o momento de inércia, b o coeficiente de atrito viscoso e θ(s) a posição angulardo eixo do motor.
A partir das equações 2.9, 2.12 e 2.13 obtém-se a função de transferência apresentadapela Eq. 2.14 (Com Td(s) = 0).
G(s) = θ(s)Va(s)
= Km
s[(Ra + Las)(Js+ b) +KbKm] . (2.14)
Capítulo 2. Fundamentação Teórica 25
Entretanto em muitos motores CC a constante de tempo da armadura τa = La/Ra
pode ser desprezada, e a função de transferência pode ser reescrita como:
G(s) = θ(s)Va(s)
= Km
s[Ra(Js+ b) +KbKm] = [Km/(Rab+KbKm)]s(τ1s+ 1) , (2.15)
onde τ1 é a contante de tempo equivalente e é definida por τ1 = RaJ/(Rab+KbKm).Por fim, definindo a constante do numerador da Eq. 2.15 como K, obtém-se a função
de transferência da posição angular pela tensão de um motor CC controlado pela armaduradado pela Eq. 2.16
G(s) = θ(s)Va(s)
= K
s(τ1s+ 1) . (2.16)
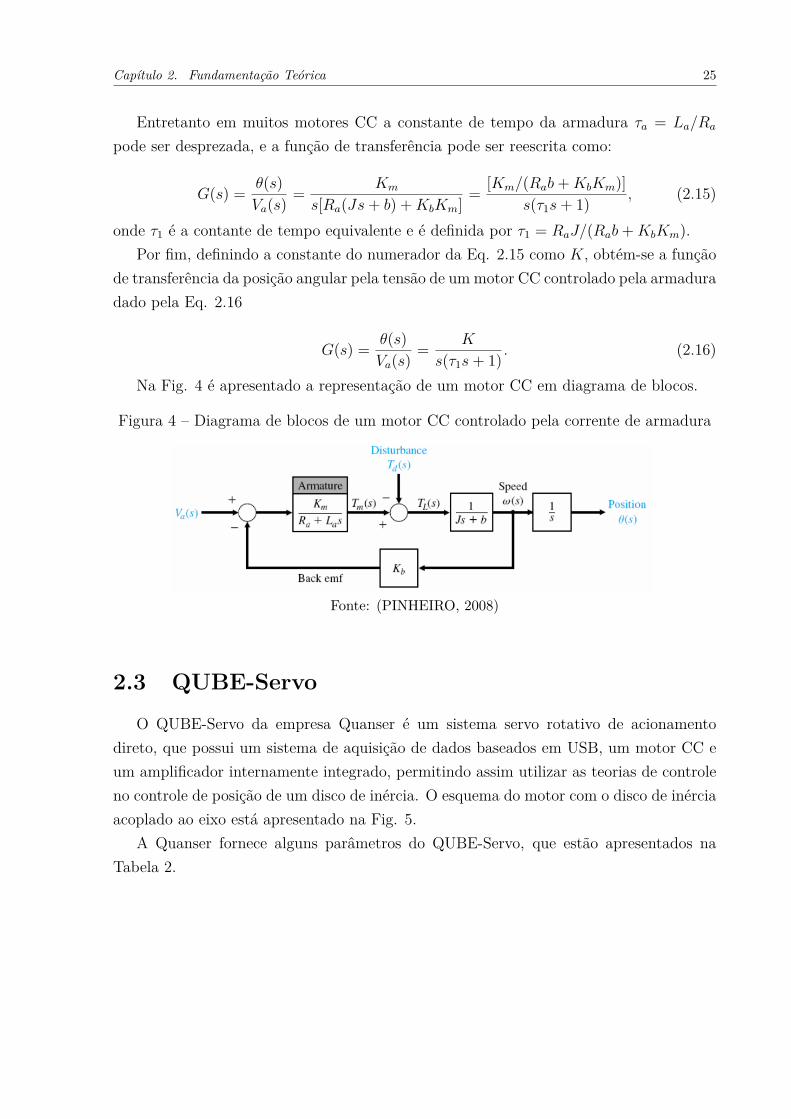
Na Fig. 4 é apresentado a representação de um motor CC em diagrama de blocos.
Figura 4 – Diagrama de blocos de um motor CC controlado pela corrente de armadura
Fonte: (PINHEIRO, 2008)
2.3 QUBE-Servo
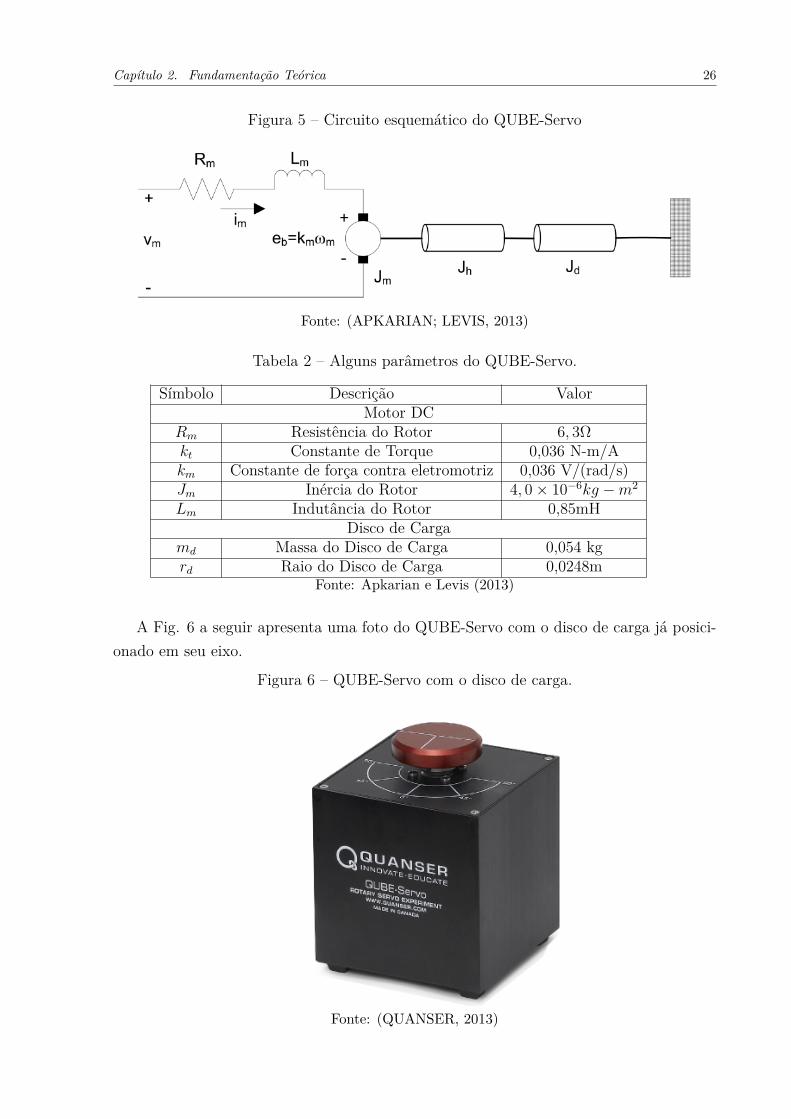
O QUBE-Servo da empresa Quanser é um sistema servo rotativo de acionamentodireto, que possui um sistema de aquisição de dados baseados em USB, um motor CC eum amplificador internamente integrado, permitindo assim utilizar as teorias de controleno controle de posição de um disco de inércia. O esquema do motor com o disco de inérciaacoplado ao eixo está apresentado na Fig. 5.
A Quanser fornece alguns parâmetros do QUBE-Servo, que estão apresentados naTabela 2.
Capítulo 2. Fundamentação Teórica 26
Figura 5 – Circuito esquemático do QUBE-Servo
Fonte: (APKARIAN; LEVIS, 2013)
Tabela 2 – Alguns parâmetros do QUBE-Servo.
Símbolo Descrição ValorMotor DC
Rm Resistência do Rotor 6, 3Ωkt Constante de Torque 0,036 N-m/Akm Constante de força contra eletromotriz 0,036 V/(rad/s)Jm Inércia do Rotor 4, 0× 10−6kg −m2
Lm Indutância do Rotor 0,85mHDisco de Carga
md Massa do Disco de Carga 0,054 kgrd Raio do Disco de Carga 0,0248m
Fonte: Apkarian e Levis (2013)
A Fig. 6 a seguir apresenta uma foto do QUBE-Servo com o disco de carga já posici-onado em seu eixo.
Figura 6 – QUBE-Servo com o disco de carga.
Fonte: (QUANSER, 2013)

Capítulo 2. Fundamentação Teórica 27
2.4 Representação no Espaço de Estados
A análise no espaço de estados envolve três tipos de variáveis que estão presentes namodelagem de sistemas dinâmicos: variáveis de entrada, de saída e de estado (OGATA,2003). Caso o sistema seja invariante no tempo, a sua representação no espaço de estadosé dado pelas Equações 2.17 e 2.18.
x(t) = Ax(t) +Bu(t) (2.17)
y(t) = Cx(t) +Du(t), (2.18)
onde:
• x(t) - Derivada do vetor de estado x(t) que contém as variáveis de estados;
• y(t) – Saída do sistema;
• A, B, C e D – Matrizes que compõem o sistema;
• u(t) - Entrada do sistema
A partir de uma função de transferência, é possível obter uma representação no espaçode estados equivalente e vice versa. O MATLAB possui duas funções que realizam essaconversão: tf2ss e ss2tf. A função tf2ss converte uma função de transferência em suarepresentação no espaço de estados e a função ss2tf converte a representação no espaçode estados em uma função de transferência (DORF; BISHOP, 1998).
Para um sistema conforme o apresentado na Fig. 1, a entrada do sistema u(t) é dadapela Eq. 2.19:
u = K(xd − x), (2.19)
para xd = 0 tem-se a Eq. 2.20:
u = −Kx. (2.20)
2.5 Sistemas de Segunda Ordem
Como apresentado pela Eq. 2.16, a função de transferência de um motor CC é desegunda ordem, fazendo-se necessário realizar um estudo sobre tais sistemas.
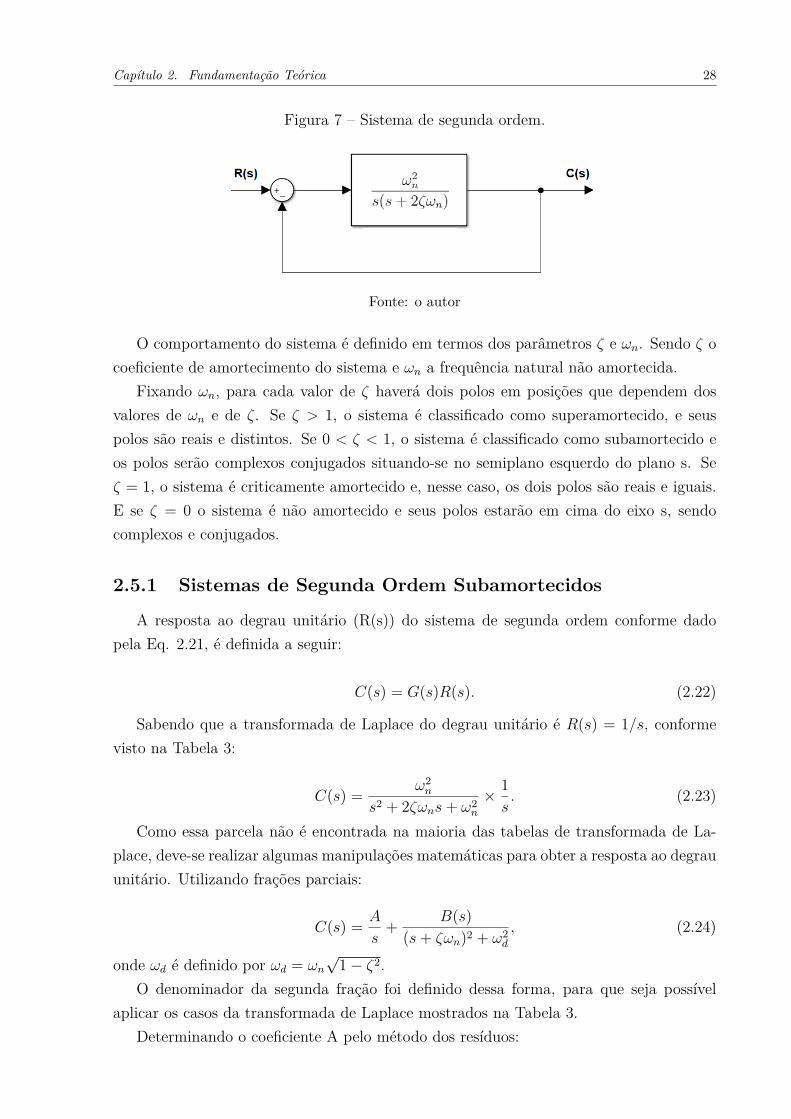
Um sistema de segunda ordem é representado na Fig. 7. A função de transferência demalha fechada C(s) por R(s) é definida pela Eq. 2.21 (OGATA, 2003).
C(s)R(s) = ω2
n
s2 + 2ζωns+ ω2n
. (2.21)
Capítulo 2. Fundamentação Teórica 28
Figura 7 – Sistema de segunda ordem.
Fonte: o autor
O comportamento do sistema é definido em termos dos parâmetros ζ e ωn. Sendo ζ ocoeficiente de amortecimento do sistema e ωn a frequência natural não amortecida.
Fixando ωn, para cada valor de ζ haverá dois polos em posições que dependem dosvalores de ωn e de ζ. Se ζ > 1, o sistema é classificado como superamortecido, e seuspolos são reais e distintos. Se 0 < ζ < 1, o sistema é classificado como subamortecido eos polos serão complexos conjugados situando-se no semiplano esquerdo do plano s. Seζ = 1, o sistema é criticamente amortecido e, nesse caso, os dois polos são reais e iguais.E se ζ = 0 o sistema é não amortecido e seus polos estarão em cima do eixo s, sendocomplexos e conjugados.
2.5.1 Sistemas de Segunda Ordem Subamortecidos
A resposta ao degrau unitário (R(s)) do sistema de segunda ordem conforme dadopela Eq. 2.21, é definida a seguir:
C(s) = G(s)R(s). (2.22)
Sabendo que a transformada de Laplace do degrau unitário é R(s) = 1/s, conformevisto na Tabela 3:
C(s) = ω2n
s2 + 2ζωns+ ω2n
× 1s. (2.23)
Como essa parcela não é encontrada na maioria das tabelas de transformada de La-place, deve-se realizar algumas manipulações matemáticas para obter a resposta ao degrauunitário. Utilizando frações parciais:
C(s) = A
s+ B(s)
(s+ ζωn)2 + ω2d
, (2.24)
onde ωd é definido por ωd = ωn√
1− ζ2.O denominador da segunda fração foi definido dessa forma, para que seja possível
aplicar os casos da transformada de Laplace mostrados na Tabela 3.Determinando o coeficiente A pelo método dos resíduos:
Capítulo 2. Fundamentação Teórica 29
Tabela 3 – Alguns pares de transformada de Laplace
f(t) F(s)degrau unitário 1
s
e−atsen(ωt) ω(s+a)2+ω2
e−atcos(ωt) s+a(s+a)2+ω2
Fonte: Dorf e Bishop (1998)
A = ω2n
s2 + 2ζωns+ ω2n
× 1s× s
∣∣∣∣∣∣s=0
A = 1, (2.25)
portanto, substituindo o valor de A na Eq. 2.24:
C(s) = 1s
+ B(s)(s+ ζωn)2 + ω2
d
. (2.26)
Fazendo o mínimo múltiplo comum:
C(s) = s2 + 2ζωns+ ω2n +B(s)s
s [(s+ ζωn)2 + ω2d]
. (2.27)
Fazendo uma comparação entre as equações 2.23 e 2.27 chega-se a conclusão que:
ωn = s2 + 2ζωns+ ω2n +B(s)s,
B(s) = −s− 2ζωn,
B(s) = −(s+ 2ζωn),
B(s) = −(s+ ζωn)− ζωn. (2.28)
Substituindo o valor de B(s) na Eq. 2.26:
C(s) = 1s− s+ ζωn
(s+ ζωn)2 + ω2d
− ζωd√1− ζ2[(s+ ζωn)2 + ω2
d]. (2.29)
Finalmente então utilizando a Tabela 3 a resposta do sistema a um degrau unitário édado pela Eq. 2.30.
c(t) = 1− e−ζωntcos(ωdt)−ζ√
1− ζ2 e−ζωntsen(ωdt),
c(t) = 1− e−ζωnt(cos
(ωn√
1− ζ2t)
+ ζ√1− ζ2 sen
(ωn√
1− ζ2t))
. (2.30)
Capítulo 2. Fundamentação Teórica 30
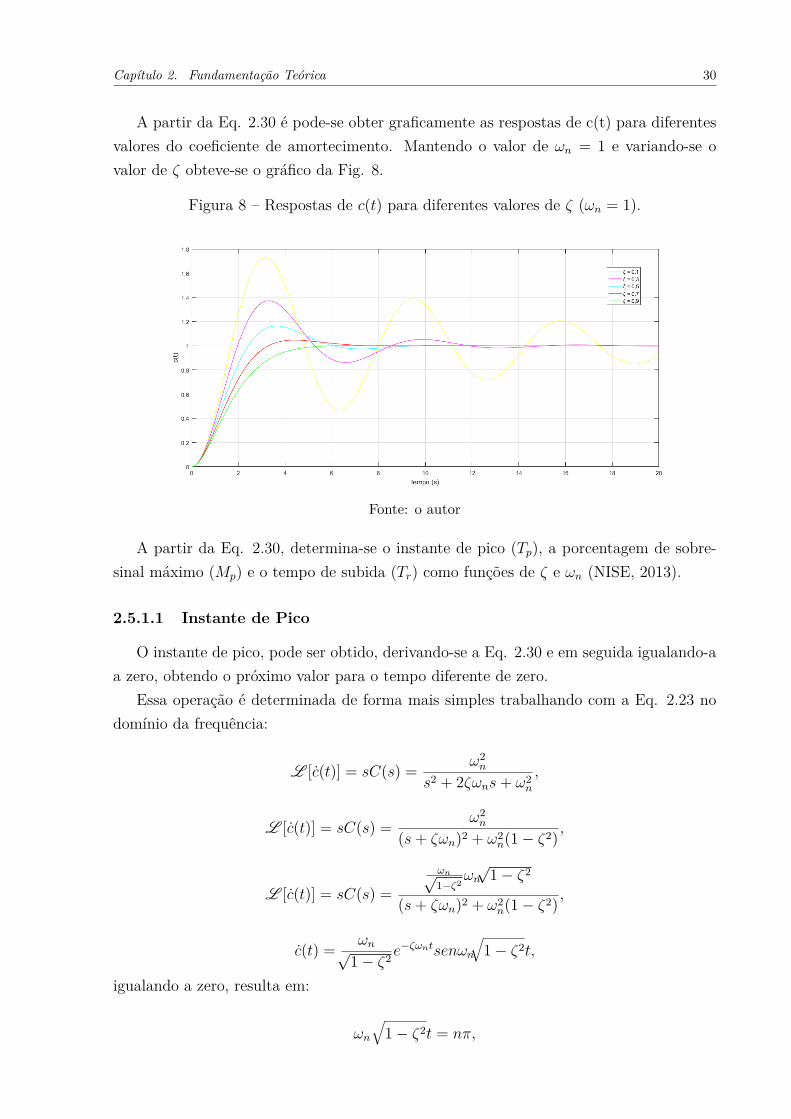
A partir da Eq. 2.30 é pode-se obter graficamente as respostas de c(t) para diferentesvalores do coeficiente de amortecimento. Mantendo o valor de ωn = 1 e variando-se ovalor de ζ obteve-se o gráfico da Fig. 8.
Figura 8 – Respostas de c(t) para diferentes valores de ζ (ωn = 1).
Fonte: o autor
A partir da Eq. 2.30, determina-se o instante de pico (Tp), a porcentagem de sobre-sinal máximo (Mp) e o tempo de subida (Tr) como funções de ζ e ωn (NISE, 2013).
2.5.1.1 Instante de Pico
O instante de pico, pode ser obtido, derivando-se a Eq. 2.30 e em seguida igualando-aa zero, obtendo o próximo valor para o tempo diferente de zero.
Essa operação é determinada de forma mais simples trabalhando com a Eq. 2.23 nodomínio da frequência:
L [c(t)] = sC(s) = ω2n
s2 + 2ζωns+ ω2n
,
L [c(t)] = sC(s) = ω2n
(s+ ζωn)2 + ω2n(1− ζ2) ,
L [c(t)] = sC(s) =ωn√1−ζ2
ωn√
1− ζ2
(s+ ζωn)2 + ω2n(1− ζ2) ,
c(t) = ωn√1− ζ2 e
−ζωntsenωn√
1− ζ2t,
igualando a zero, resulta em:
ωn√
1− ζ2t = nπ,

Capítulo 2. Fundamentação Teórica 31
t = nπ
ωn√
1− ζ2 .
Se n ∈ Z, c(t) assume um valor máximo ou mínimo local. Para n = 0, obtém-se t = 0,portanto o primeiro pico ocorre em n = 1, obtendo finalmente a Equação que determinao instante de pico:
Tp = π
ωn√
1− ζ2 . (2.31)
2.5.1.2 Sobre-sinal Máximo
O sobre-sinal máximo é calculado da seguinte maneira:
Mp = cmáx − cfinalcfinal
.
Sendo cmáx obtido no instante de pico, ou seja, c(Tp):
cmáx = c(Tp) = 1− e−(ζπ/√
1−ζ2) (
cosπ + ζ√1− ζ2 senπ
),
cmáx = 1 + e−(ζπ/√
1−ζ2).
Como para o degrau unitário cfinal = 1:
Mp = e−(ζπ/√
1−ζ2). (2.32)
Representando a Eq. 2.32 em forma de porcetagem:
%Mp = e−(ζπ/√
1−ζ2)× 100. (2.33)
2.5.1.3 Tempo de Acomodação
O tempo de acomodação é obtido admitindo uma faixa de de tolerância em torno dovalor em regime permanente. Para a demonstração será admitido uma tolerância de ±2%,ou seja, o tempo necessário para que a amplitude amortecida da senoide chegue a 0,02,sendo assim:
e−ζωnt1√
1− ζ2 = 0, 02.
Isolando o tempo da Eq. acima:
Ts = −ln(0, 02√
1− ζ2)ζωn
.
Capítulo 2. Fundamentação Teórica 32
Como o numerador pode admitir valores entre 3,91 e 4,71 conforme ζ varia entre 0 e0,9, é possível aproximar a Eq. anterior para o critério de ±2% na Eq. 2.34:
Ts = 4ζωn
. (2.34)
Para um critério de ±1% o tempo de acomodação é dado pela Eq. 2.35:
Ts = 4, 6ζωn
. (2.35)
Para um critério de ±5% o tempo de acomodação é dado pela Eq. 2.36:
Ts = 3ζωn
. (2.36)
2.5.1.4 Tempo de Subida
O tempo de subida não pode ser obtido de forma precisa em uma expressão relacionando-se ζ e ωn. Porém o tempo de subida pode ser obtido através da Eq. 2.30, considerando ωntcomo a variável de tempo normalizada e escolhendo o valor de ζ. Fixando-se o valor deζ é possível obter os valores de ωnt que resultam em c(t) = 0, 9 e c(t) = 0, 1. Ao subtrairos dois valores de ωnt resulta no tempo de subida normalizado ωnTr (NISE, 2013).
Para diferentes valores de ζ pode-se consultar a Tabela 4 a seguir:
Tabela 4 – Valores de diferentes fatores de amortecimento com seus respectivos temposde subida
Fator de Amortecimento Tempo de Subida Normalizado0,1 1,1040,2 1,2030,3 1,3210,4 1,4630,5 1,6380,6 1,8540,7 2,1260,8 2,4670,9 2,883
Fonte: Nise (2013)
Sendo assim o tempo de subida normalizado em função do coeficiente de amorteci-mento pode ser representado graficamente, conforme mostrado na Fig. 9.
2.6 Controlabilidade
A partir das matrizes A e B de um sistema, é possível determinar se o mesmo écontrolável. Considerando-se o espaço de estados Rn e escolhendo dois pontos quaisquer,

Capítulo 2. Fundamentação Teórica 33
Figura 9 – Tempo de subida normalizado em função do coeficiente de amortecimento.
Fonte: o autor
sendo um de entrada (x(0))e outro de saída(x(t)), o sistema será controlável se existir umaentrada que leve o sistema da condição inicial x(0) até a condição final x(t) em tempofinito.
Para o sistema expresso pela Eq. 2.37
x = Ax+Bu, (2.37)
é possível determinar se o sistema com uma única entrada e uma única saída é controlávelpela matriz de controlabilidade Mc, expresso pela Eq. 2.38:
Mc =[B AB A2B ... An−1B
]. (2.38)
A matriz Mc será uma matriz quadrada n× n, e caso seu determinante seja diferentede zero, o sistema é controlável (DORF; BISHOP, 1998).
2.7 Fórmula de Ackermann
A fórmula de Ackermann é uma forma útil de determinar a matriz de ganho de retroa-ção de estados em sistemas com uma única entrada e uma única saída (DORF; BISHOP,1998).
A partir da lei de controle definida pela Eq. 2.20, a matriz de ganho é obtida pela Eq.2.39:
K =[
0 0 ... 1]M−1
c α(A), (2.39)
sendo o primeiro elemento um vetor composto de zeros e na última posição o valor um. Mc
é a matriz de controlabilidade definido pela Eq. 2.38 e α(A) é o polinômio característico

Capítulo 2. Fundamentação Teórica 34
desejado avaliado na matriz A do sistema. A matriz de ganho K resulta então em umvetor linha 1× n.
O polinômio característico desejado é definido da seguinte forma:
α(s) = (s− p1)(s− p2)...(s− pn) (2.40)
sendo p1, ...pn os polos desejados.Obtido o polinômio característico basta avaliá-lo na matriz A e calcular então a matriz
de ganho K.
2.8 LMI
As LMIs (ou Desigualdades matriciais lineares, do inglês Linear Matrix Inequalities)são muito utilizadas nas leis de controle, e se mostra um método vantajoso quando há umagrande quantidade de variáveis matriciais, sendo possível transformar qualquer problemade controle em problemas LMI (SKOGESTAD; POSTLETHWAITE, 2005).
2.8.1 Breve História sobre as LMIs
Em 1890, Lyapunov mostrou que a equação diferencial representada por 2.41,
d
dtx(t) = Ax(t), (2.41)
é estável (todas as trajetórias convergem para zero) se existir uma matriz positiva P detal forma que:
A′P + PA < 0. (2.42)
Assim, a condição P > 0, A′P +PA < 0 é conhecida como desigualdade de Lyapunovem P (BOYD et al., 1994).
Em 1940, Lur’e, Postnikov e outros na União Soviética aplicaram o método de Lyapu-nov para alguns problemas práticos específicos na engenharia de controle, especialmente,o problema da estabilidade de um sistema de controle não linear no atuador. Apesar denão utilizarem desigualdades matriciais, seus critérios de estabilidade tem o formato deLMIs. Essas inequações foram reduzidas em inequações polinomiais que foram checadasem pequenos sistemas (BOYD et al., 1994).
O próximo grande marco na história das LMIs ocorreu no início da década de 1960,quando Yakubovich, Popov, Kalman e outros pesquisadores conseguiram reduzir a soluçãodas LMIs que surgiu no problema de Lur’e para critérios gráficos simples, usando o queatualmente é chamado de positive-real (PR) lemma, o que ficou conhecido posteriormente

Capítulo 2. Fundamentação Teórica 35
como critério de Povov, contribuindo então como resolver uma determinada família deLMIs por métodos gráficos (BOYD et al., 1994).
Já na década de 1980, mais precisamente em 1984, N. Karmarkar introduziu um novoalgoritmo de programação linear que resolve programas lineares em tempo polinomial,como o método elipsoidal, que também é muito eficiente na prática. Em 1988, Nesterove Nemirovskii desenvolveram métodos de ponto interior que se aplicam diretamente aproblemas convexos envolvendo LMIs (BOYD et al., 1994).
2.8.2 Estabilidade de Lyapunov
Dado um sistema sem realimentação de estados definido pela Eq. 2.43:
x(t) = Ax(t), (2.43)
o critério de estabilidade de Lyapunov é obtido definindo-se uma função quadrática escalarpositiva (AGUIRRE, 2007):
V (x(t)) = xT (t)Px(t) > 0, (2.44)
sendo P = P T > 0, P ∈ Rn×n. A derivada da Eq. 2.44 é dada por:
V (x(t)) = xT (t)(ATP + PA)x(t). (2.45)
Então para haver estabilidade assintótica, é necessário que V (x(t)) seja positivo eV (x(t)) seja negativo, ou seja, V (x(t)) > 0 e V (x(t)) < 0. Assim obtém-se as LMIsapresentadas pelas equações 2.46 e 2.47.
ATP + PA < 0, (2.46)
P > 0. (2.47)
Portanto o teorema de Lyapunov garante que o sistema indicado pela Eq. 2.43 éassintoticamente estável se existir uma matriz P = P T > 0 satisfazendo a LMI dada pelaEq. 2.46 para o tempo contínuo.
2.8.3 Controlador Baseado em LMI para Sistemas em MalhaFechada
Considerando-se um sistema em malha fechada conforme o apresentado na Fig. 1,e utilizando-se os critérios de estabilidade de Lyapunov, em vez de trabalhar com umamatriz A, tem-se agora a relação A − BK como objeto de análise (NEGRAO, 2013) e

Capítulo 2. Fundamentação Teórica 36
utilizando uma lei de controle u = −Kx, o sistema realimentado passa a ser descritocomo:
x = Ax+B(−Kx) = (A−BK)x. (2.48)
Aplicando então a Eq. 2.48 nos critérios de estabilidade de Lyapunov:
P (A−BK) + (A−BK)TP < 0, (2.49)
P > 0. (2.50)
Realizando a distributiva:
PA− PBK + ATP −KTBTP < 0, (2.51)
P > 0. (2.52)
Multiplicando ambos os lados da Eq. 2.51 por P−1, para se obter uma LMI:
P−1(PA− PBK + ATP −KTBTP )P−1 < 0, (2.53)
AP−1 −BKP−1 + P−1AT − P−1KTBT < 0. (2.54)
Definindo-se as variáveis W = P−1 e Z = KP−1 = KW tem-se as LMIs apresentadaspelas Equações 2.55 e 2.56.
WAT + AW −BZ − ZTBT < 0, (2.55)
W > 0. (2.56)
Portanto, para projetar um controlador baseado em LMI, deve-se encontrar as matrizesW = W T e Z que satisfaçam as LMIs descritas acima. A partir da solução, a matriz K édefinida pela Eq. 2.57:
K = ZW−1. (2.57)

Capítulo 2. Fundamentação Teórica 37
2.8.4 Controlador Baseado em LMI para Sistemas em MalhaFechada Considerando Taxa de Decaimento
A taxa de decaimento, também conhecida como o maior expoente de Lyapunov, édefinida como o maior γ, de forma que (BOYD et al., 1994):
limx→∞
eγt||x(t)||, (2.58)
para todas as trajetórias de x, sendo ||x(t)|| a norma euclidiana de x(t).Pode-se usar a função de Lyapunov V (x) = xTPx para estabelecer um limite inferior
para a taxa de decaimento.Se V (x) ≤ −2γV (x), para todas as trajetórias, então V (x(t)) ≤ V (x(0))e−2γt de
modo que, ||x(t)|| ≤ e−γtκ(P )1/2||x(0)|| para todas as trajetórias, portanto, a taxa dedecaimento aplicada aos critérios de estabilidade de Lyapunov implica em:
ATP + PA+ 2γP < 0, (2.59)
P > 0. (2.60)
Considerando agora um sistema em malha fechada, e aplicando os mesmos passos des-critos no subtópico anterior, obtém-se as LMIs para o projeto do controlador considerandoa taxa de decaimento, descrito pelas Equações 2.61 e 2.62.
WAT + AW −BZ − ZTBT < −2γW, (2.61)
W > 0. (2.62)
Graficamente, a região limitada pela taxa de decaimento pode ser representada pelaárea hachurada em azul conforme mostrado na Fig. 10.
Quanto maior for o valor de γ, mais longe os polos serão alocados da origem, e maisrápido será o tempo de assentamento, porém será exigido mais do sistema. No caso doQUBE-Servo, conforme apresentado posteriormente nos resultados, ao aumentar o valorde γ, observa-se que a posição angular atinge sua referência mais rapidamente, no entanto,é exigido valores de tensões cada vez maiores para que isso de fato ocorra.
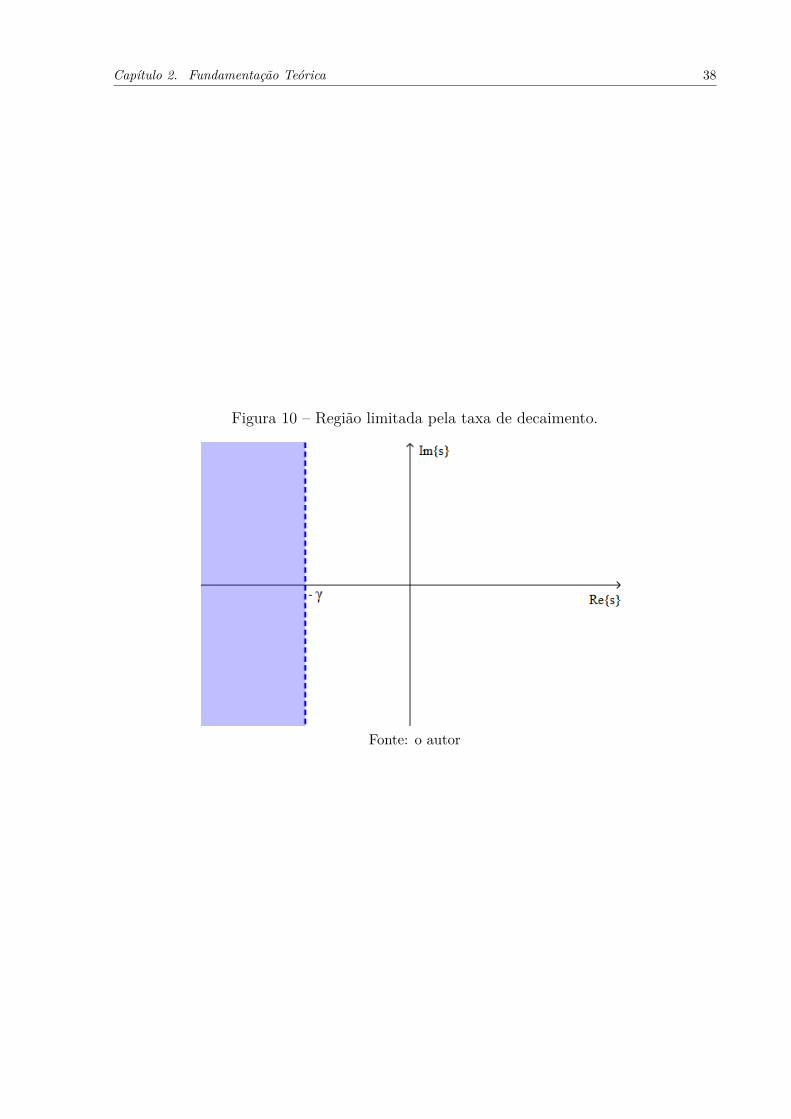
Capítulo 2. Fundamentação Teórica 38
Figura 10 – Região limitada pela taxa de decaimento.
Fonte: o autor
39
3 Desenvolvimento
3.1 Materiais
Para a realização deste trabalho, utilizou-se os materiais listados a seguir:
• Quanser QUBE-Servo Direct I/O Inferface;
• Módulo disco de Inércia;
• Softwares: MATLAB/Simulink e QUARC.
3.2 Representação em Espaço de Estados
Conhecendo-se a função de transferência da posição angular pela tensão do QUBE-Servo com o auxílio de dados fornecidos pelo fabricante, foi obtida sua representação emespaço de estados.
A representação no espaço de estados é importante, pois as matrizes A, B, C e Destarão presentes em todos os tópicos dos resultados, sendo utilizadas para verificar acontrolabilidade do sistema, obter as matrizes de ganho das leis de controle propostas epresentes também no diagrama de blocos que dos controladores.
3.3 Verificação da Controlabilidade do Sistema
Antes de desenvolver os controladores propostos, deve-se verificar se o sistema emquestão é controlável.
Para verificar a controlabilidade, utilizou-se a Eq. 2.38 descrita anteriormente.
3.4 Projeto do Controlador pela Fórmula de Acker-mann
Com o QUBE devidamente conectado conforme mostrado pelo “Quick Start Guide:Quanser QUBE-Servo Direct I/O Inferface” (QUANSER, 2013), arquivo disponibilizadopela Quanser (QUANSER, 2013), e com o disco de inércia acoplado ao QUBE-Servo,foram iniciados os estudos no sistema. Como descrito anteriormente, primeiramente foirealizada a simulação do controlador via Simulink para que, posteriormente, o controlefosse implementado no QUBE-Servo.
Capítulo 3. Desenvolvimento 40
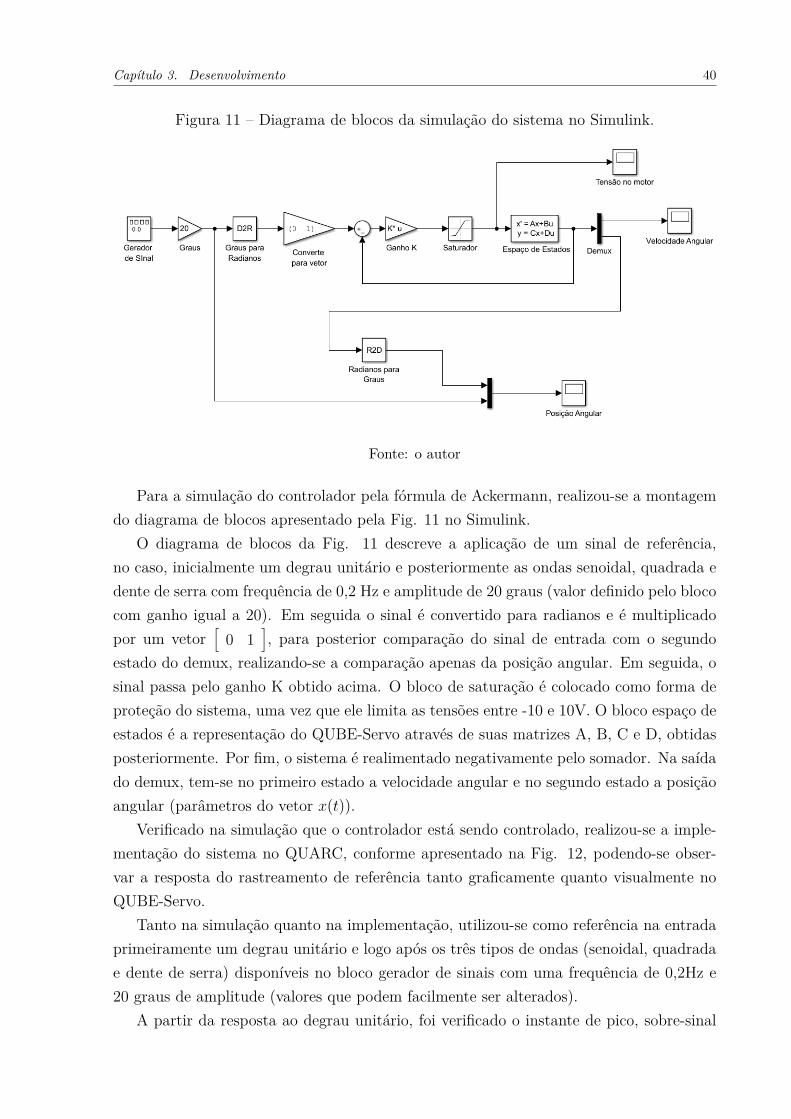
Figura 11 – Diagrama de blocos da simulação do sistema no Simulink.
Fonte: o autor
Para a simulação do controlador pela fórmula de Ackermann, realizou-se a montagemdo diagrama de blocos apresentado pela Fig. 11 no Simulink.
O diagrama de blocos da Fig. 11 descreve a aplicação de um sinal de referência,no caso, inicialmente um degrau unitário e posteriormente as ondas senoidal, quadrada edente de serra com frequência de 0,2 Hz e amplitude de 20 graus (valor definido pelo blococom ganho igual a 20). Em seguida o sinal é convertido para radianos e é multiplicadopor um vetor
[0 1
], para posterior comparação do sinal de entrada com o segundo
estado do demux, realizando-se a comparação apenas da posição angular. Em seguida, osinal passa pelo ganho K obtido acima. O bloco de saturação é colocado como forma deproteção do sistema, uma vez que ele limita as tensões entre -10 e 10V. O bloco espaço deestados é a representação do QUBE-Servo através de suas matrizes A, B, C e D, obtidasposteriormente. Por fim, o sistema é realimentado negativamente pelo somador. Na saídado demux, tem-se no primeiro estado a velocidade angular e no segundo estado a posiçãoangular (parâmetros do vetor x(t)).
Verificado na simulação que o controlador está sendo controlado, realizou-se a imple-mentação do sistema no QUARC, conforme apresentado na Fig. 12, podendo-se obser-var a resposta do rastreamento de referência tanto graficamente quanto visualmente noQUBE-Servo.
Tanto na simulação quanto na implementação, utilizou-se como referência na entradaprimeiramente um degrau unitário e logo após os três tipos de ondas (senoidal, quadradae dente de serra) disponíveis no bloco gerador de sinais com uma frequência de 0,2Hz e20 graus de amplitude (valores que podem facilmente ser alterados).
A partir da resposta ao degrau unitário, foi verificado o instante de pico, sobre-sinal
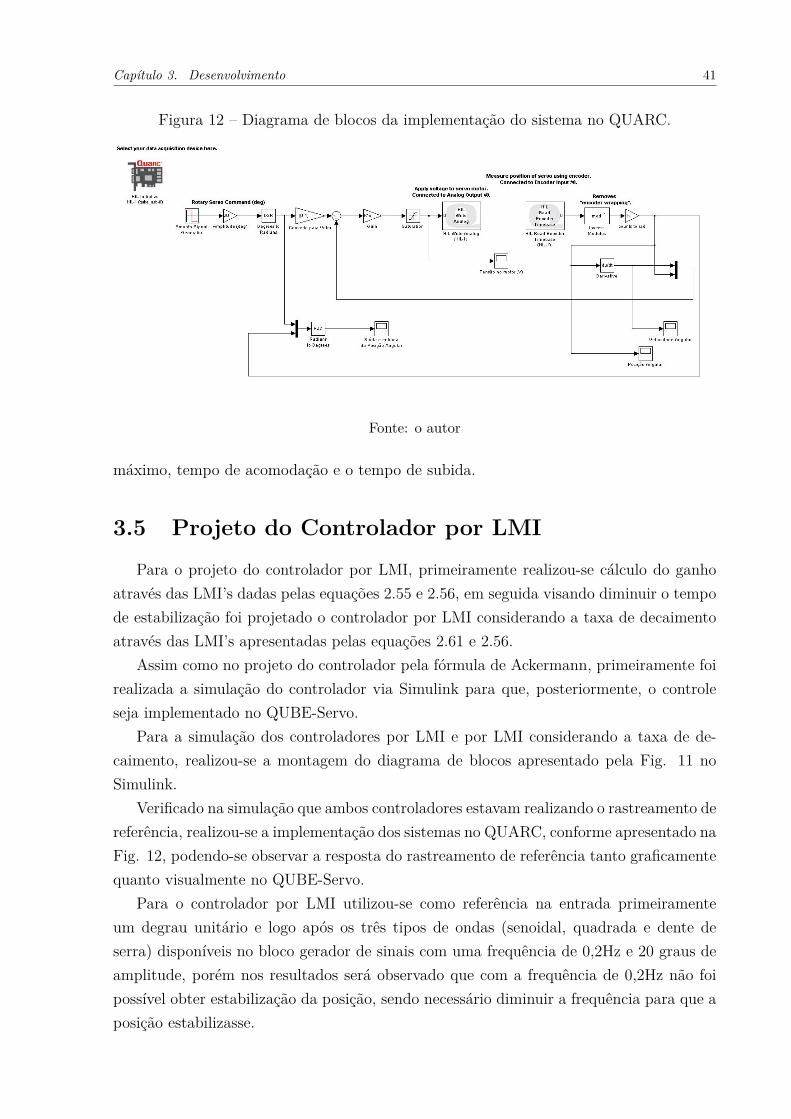
Capítulo 3. Desenvolvimento 41
Figura 12 – Diagrama de blocos da implementação do sistema no QUARC.
Fonte: o autor
máximo, tempo de acomodação e o tempo de subida.
3.5 Projeto do Controlador por LMI
Para o projeto do controlador por LMI, primeiramente realizou-se cálculo do ganhoatravés das LMI’s dadas pelas equações 2.55 e 2.56, em seguida visando diminuir o tempode estabilização foi projetado o controlador por LMI considerando a taxa de decaimentoatravés das LMI’s apresentadas pelas equações 2.61 e 2.56.
Assim como no projeto do controlador pela fórmula de Ackermann, primeiramente foirealizada a simulação do controlador via Simulink para que, posteriormente, o controleseja implementado no QUBE-Servo.
Para a simulação dos controladores por LMI e por LMI considerando a taxa de de-caimento, realizou-se a montagem do diagrama de blocos apresentado pela Fig. 11 noSimulink.
Verificado na simulação que ambos controladores estavam realizando o rastreamento dereferência, realizou-se a implementação dos sistemas no QUARC, conforme apresentado naFig. 12, podendo-se observar a resposta do rastreamento de referência tanto graficamentequanto visualmente no QUBE-Servo.
Para o controlador por LMI utilizou-se como referência na entrada primeiramenteum degrau unitário e logo após os três tipos de ondas (senoidal, quadrada e dente deserra) disponíveis no bloco gerador de sinais com uma frequência de 0,2Hz e 20 graus deamplitude, porém nos resultados será observado que com a frequência de 0,2Hz não foipossível obter estabilização da posição, sendo necessário diminuir a frequência para que aposição estabilizasse.

Capítulo 3. Desenvolvimento 42
Para o controlador por LMI considerando a taxa de decaimento, utilizou-se comoreferência as mesmas ondas com os mesmos parâmetros das utilizadas pelo controladorpela fórmula de Ackermann.

43
4 Resultados
4.1 Representação em Espaço de Estados
Sabe-se que a função de transferência de um motor de corrente contínua é dado pelaequação 2.16. A Quanser fornece os valores de K=23 e a contante de tempo τl = 0, 13.Assim a função de transferência do QUBE-Servo da posição angular pela tensão é apre-sentada pela Eq. 4.1.
θ(s)V (s) = 23
s(0, 13s+ 1) . (4.1)
A partir da função de transferência obtêm-se as matrizes A, B, C e D da representaçãono espaço de estados, que serão utilizadas para determinar os ganhos dos controladores.
Sabendo que a posição angular é a saída do sistema e a tensão aplicado é a entradado sistema, pode-se escrever a função de transferência da Eq. 4.1 em termos de Y(s) eU(s) (saída e entrada respectivamente) conforme apresentado na Eq. 4.2.
Y (s)U(s) = 23
s(0, 13s+ 1) . (4.2)
A Eq. 4.2 pode ser reescrita da seguinte forma:
0, 13s2Y (s) + sY (s) = 23U(s). (4.3)
Passando a Eq. 4.3 para o domínio do tempo considerando nulas as condições iniciais:
0, 13y + y = 23u. (4.4)
Definindo as variáveis de estados como x1 = y e x2 = y, portanto x1 = y e x2 = y. AEq. 4.4 passa a ser:
0, 13x1 + x2 = 23u. (4.5)
Isolando então os termos x1 e x2 em função de x:
x1 = −x1 + 23u0, 13 , (4.6)
x2 = x1.

Capítulo 4. Resultados 44
A partir das equações acima é possível escrever a representação em espaço de estadosdo QUBE-Servo conforme dado pela Eq. 4.7.
x1
x2
=−7, 692 0
1 0
x1
x2
+ 176, 923
0
u(t), (4.7)
y(t) =[
0 1] x1
x2
.Portanto as matrizes de estado do QUBE-Servo podem ser expressas por:
A =−7, 692 0
1 0
, (4.8)
B = 176, 923
0
, (4.9)
C =[
0 1], (4.10)
D =[
0]. (4.11)
E o vetor de estados x(t) dado pela velocidade angular (derivada da posição angular)e pela posição angular, ou seja, x(t) =
[θ θ
]T.
4.2 Verificação da Controlabilidade do Sistema
Sabendo que matriz de controlabilidade é definida por:
Mc =[B AB
],
Mc =176, 946 −1360, 9
0 176, 9
. (4.12)
Caso o determinante da matriz de controlabilidade seja diferente de zero, o sistemaserá controlável. Calculando o determinante da matriz de controlabilidade, obtém-se quedet(Mc) = 31301, 747, logo o sistema é controlável.

Capítulo 4. Resultados 45
4.3 Projeto do Controlador pela Fórmula de Acker-mann
4.3.1 Simulação do Controlador pela Fórmula de Ackermann
O primeiro passo para simular o controlador pela fórmula de Ackermann é encontrar oganho do controlador. Para obter o ganho é necessário encontrar os valores do coeficientede amortecimento (ζ) e a frequência natural não amortecida (ωn), determinando-se entãoonde os polos estarão alocados. Comparando então a função de transferência do QUBE-Servo com a função característica de sistemas de segunda ordem (ambas de malha aberta)obtêm-se ζ e ωn:
ω2n
s(s+ 2ζωn) = 23s(0, 13s+ 1) = 176, 923
s(s+ 7, 692) . (4.13)
Portanto:
ω2n = 176, 923,
ωn =√
176, 923,
ωn = 13, 301rad/s, (4.14)
e
2ζωn = 7, 692,
ζ = 7, 6922ωn
= 7, 69226, 602 ,
ζ = 0, 289. (4.15)
Como 0 < ζ < 1, os pólos de malha fechada são complexos conjugados e situam-se nosemiplano esquerdo do plano s (OGATA, 2003).
Os polos serão alocados nas raízes da equação s2 + 2ζωn + ω2n, ou seja:
s1,2 = −ζωn ± jωn√
1− ζ2,
s1 = −3, 843 + j12, 733, (4.16)
s2 = −3, 843− j12, 733. (4.17)

Capítulo 4. Resultados 46
Com as matrizes de estado e os polos p1 e p2 foi determinado o valor do ganho docontrolador pela fórmula de Ackermann.
O polinômio característico é obtido através da seguinte expressão:
αe(s) = (s− (−3, 843 + j12, 733))(s− (−3, 843− j12, 733)),
αe(s) = s2 + 7, 686s+ 176, 898. (4.18)
O polinômio característico desejado avaliado na matriz A é encontrado a seguir.
αe(A) = A2 + 7, 686A+ 176, 898I,
αe(A) =176, 946 0−0, 006 176, 898
. (4.19)
A matriz de controlabilidade é definida por:
Mc =[B AB
],
Mc =176, 946 −1360, 9
0 176, 9
. (4.20)
Por fim é então obtido a matriz de ganho:
K =[
0 1]Mc−1αe(A),
K =[
0 1]. (4.21)
Com o ganho do controlador projetado, realizou-se a simulação fazendo-se a montagemdo diagrama de blocos conforme mostrado na Fig. 11.
A fim de verificar se o sistema está rastreando a referência, foi comparado o segundoestado do demux (posição angular convertida para graus) com o degrau unitário (referênciade 1 grau, ocorrendo em 5 segundos para haver a certeza de que a posição inicial estejaem 0 graus) aplicado inicialmente. Como resultado tem-se o seguinte gráfico apresentadoa seguir pela Fig. 13.
O gráfico da posição angular em função do tempo está apresentado na Fig. 14.Pela Fig. 15, observa-se que o pico máximo de tensão acontece quando ocorre o degrau
unitário, tendo um valor de aproximadamente 17mV , valor bem abaixo dos parâmetrosdo saturador, não ocorrendo então interferência do saturador no controle do rastreamentode referência.
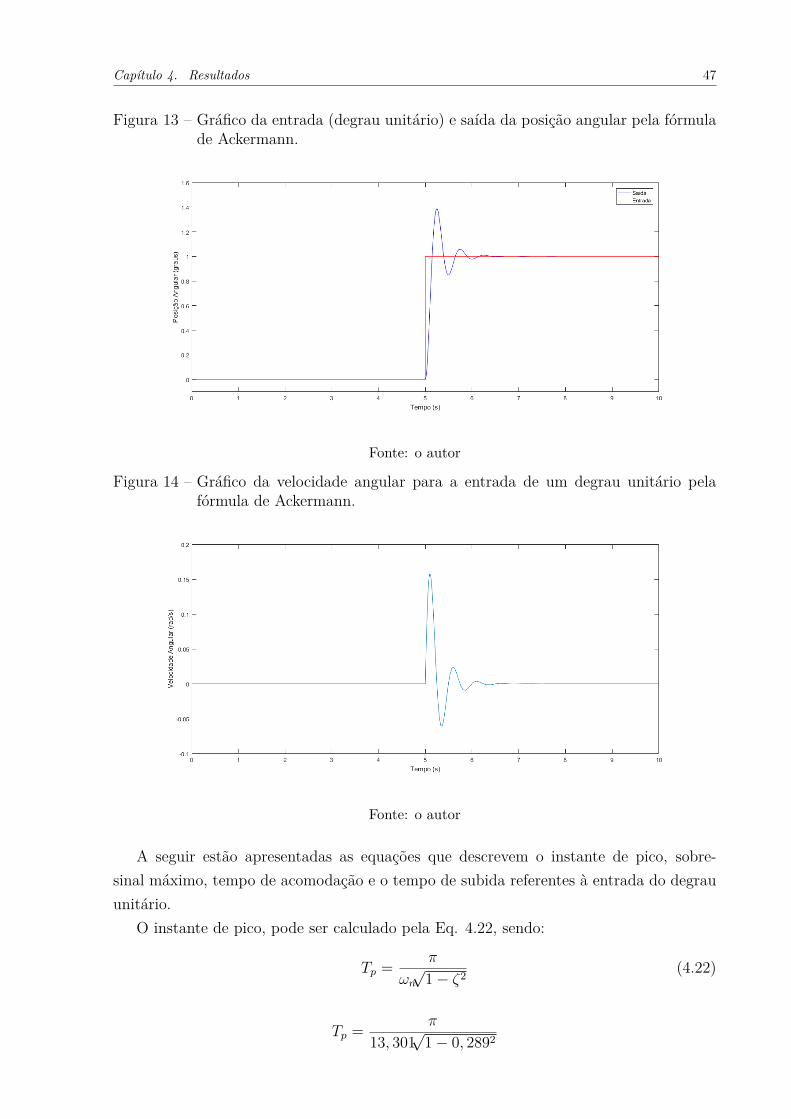
Capítulo 4. Resultados 47
Figura 13 – Gráfico da entrada (degrau unitário) e saída da posição angular pela fórmulade Ackermann.
Fonte: o autor
Figura 14 – Gráfico da velocidade angular para a entrada de um degrau unitário pelafórmula de Ackermann.
Fonte: o autor
A seguir estão apresentadas as equações que descrevem o instante de pico, sobre-sinal máximo, tempo de acomodação e o tempo de subida referentes à entrada do degrauunitário.
O instante de pico, pode ser calculado pela Eq. 4.22, sendo:
Tp = π
ωn√
1− ζ2 (4.22)
Tp = π
13, 301√
1− 0, 2892
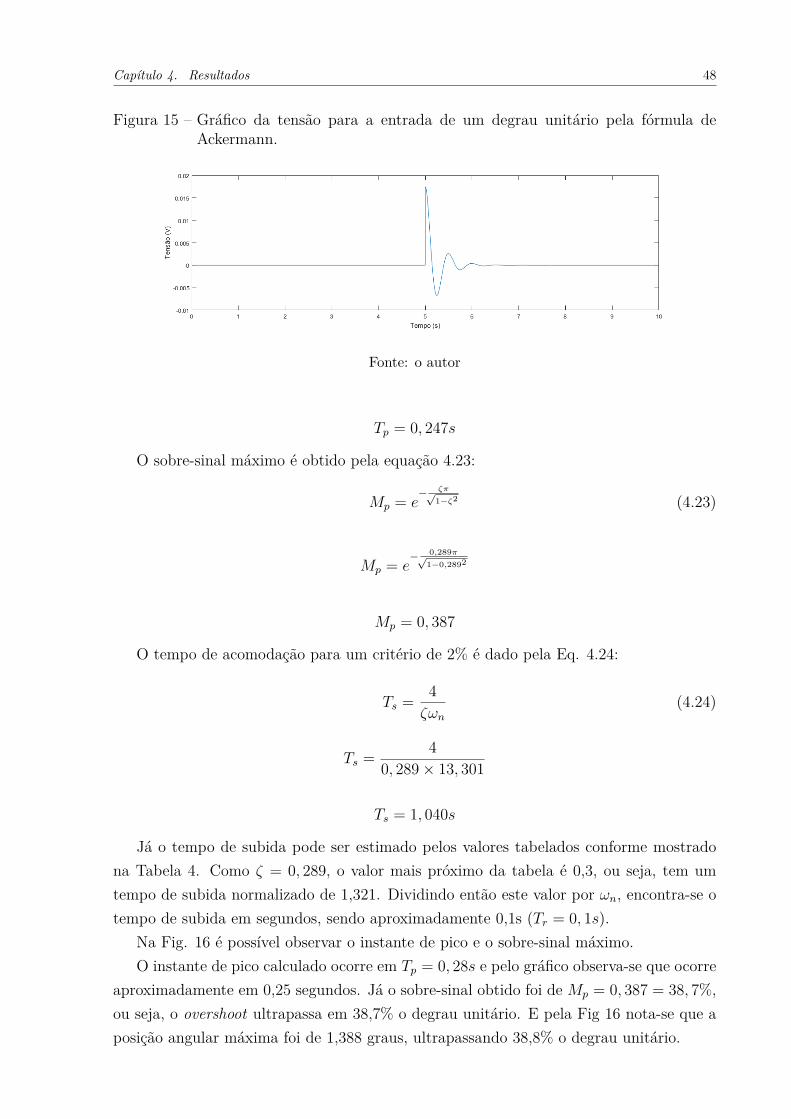
Capítulo 4. Resultados 48
Figura 15 – Gráfico da tensão para a entrada de um degrau unitário pela fórmula deAckermann.
Fonte: o autor
Tp = 0, 247s
O sobre-sinal máximo é obtido pela equação 4.23:
Mp = e− ζπ√
1−ζ2 (4.23)
Mp = e− 0,289π√
1−0,2892
Mp = 0, 387
O tempo de acomodação para um critério de 2% é dado pela Eq. 4.24:
Ts = 4ζωn
(4.24)
Ts = 40, 289× 13, 301
Ts = 1, 040s
Já o tempo de subida pode ser estimado pelos valores tabelados conforme mostradona Tabela 4. Como ζ = 0, 289, o valor mais próximo da tabela é 0,3, ou seja, tem umtempo de subida normalizado de 1,321. Dividindo então este valor por ωn, encontra-se otempo de subida em segundos, sendo aproximadamente 0,1s (Tr = 0, 1s).
Na Fig. 16 é possível observar o instante de pico e o sobre-sinal máximo.O instante de pico calculado ocorre em Tp = 0, 28s e pelo gráfico observa-se que ocorre
aproximadamente em 0,25 segundos. Já o sobre-sinal obtido foi de Mp = 0, 387 = 38, 7%,ou seja, o overshoot ultrapassa em 38,7% o degrau unitário. E pela Fig 16 nota-se que aposição angular máxima foi de 1,388 graus, ultrapassando 38,8% o degrau unitário.

Capítulo 4. Resultados 49
Figura 16 – Gráfico da entrada e saída (com o ponto de máximo marcado) da posiçãoangular.
Fonte: o autor
Figura 17 – Gráfico da entrada e saída (com o ponto onde ocorre o tempo de acomodaçãomarcado) da posição angular.
Fonte: o autor
O tempo de acomodação pode ser observado na Fig. 17.Pela Fig. 17 observa-se que o tempo de acomodação foi de 1,015 segundos, valor
próximo do calculado (Ts = 1, 040s), para o critério de 2% (último instante por onde aposição passa por 0,98).
Por fim, o tempo de subida pode ser verificado pela Fig. 18.Pela Fig. 18 observa-se que o tempo de subida foi de aproximadamente 0,1 segundos,
valor próximo do calculado (Tr = 0, 1s).A seguir será apresentado o comportamento do controlador para as ondas senoidal,
quadrada e dente de serra.Nas Figuras 19, 20 e 21 estão apresentados os gráficos da posição angular, velocidade
angular e tensão para uma entrada de referência senoidal.Nas Figuras 22, 23 e 24 estão apresentados os gráficos da posição angular, velocidade
Capítulo 4. Resultados 50
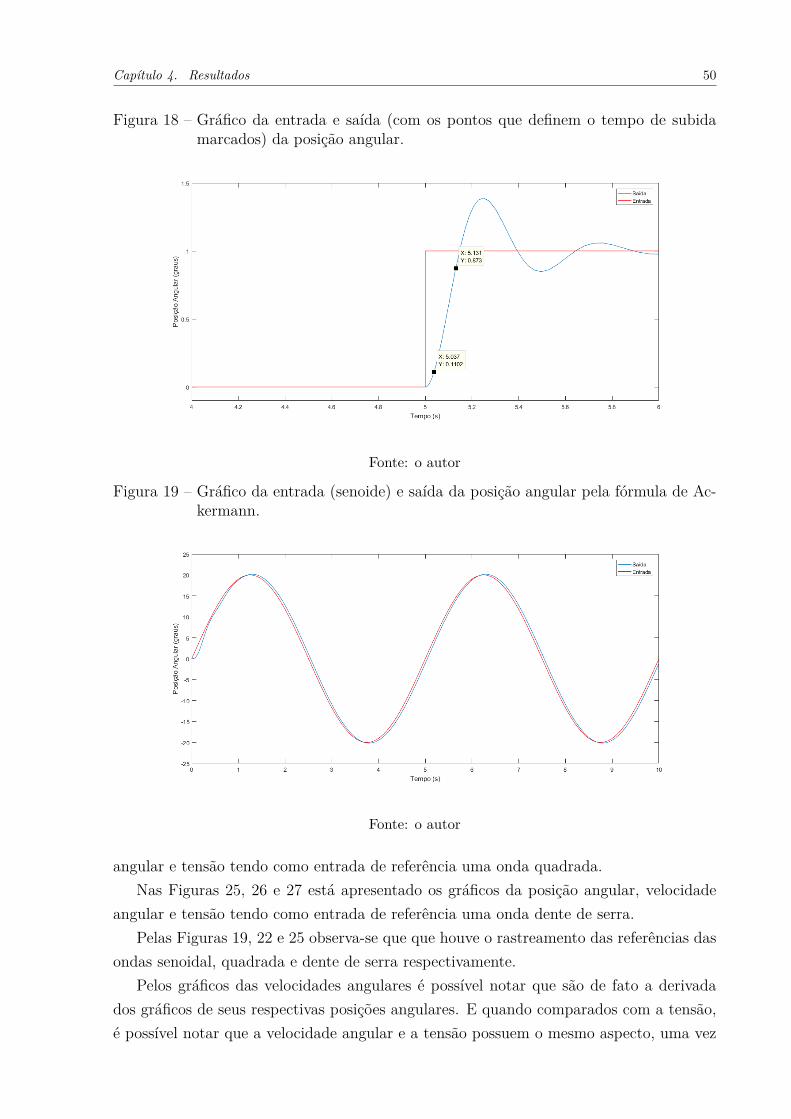
Figura 18 – Gráfico da entrada e saída (com os pontos que definem o tempo de subidamarcados) da posição angular.
Fonte: o autor
Figura 19 – Gráfico da entrada (senoide) e saída da posição angular pela fórmula de Ac-kermann.
Fonte: o autor
angular e tensão tendo como entrada de referência uma onda quadrada.Nas Figuras 25, 26 e 27 está apresentado os gráficos da posição angular, velocidade
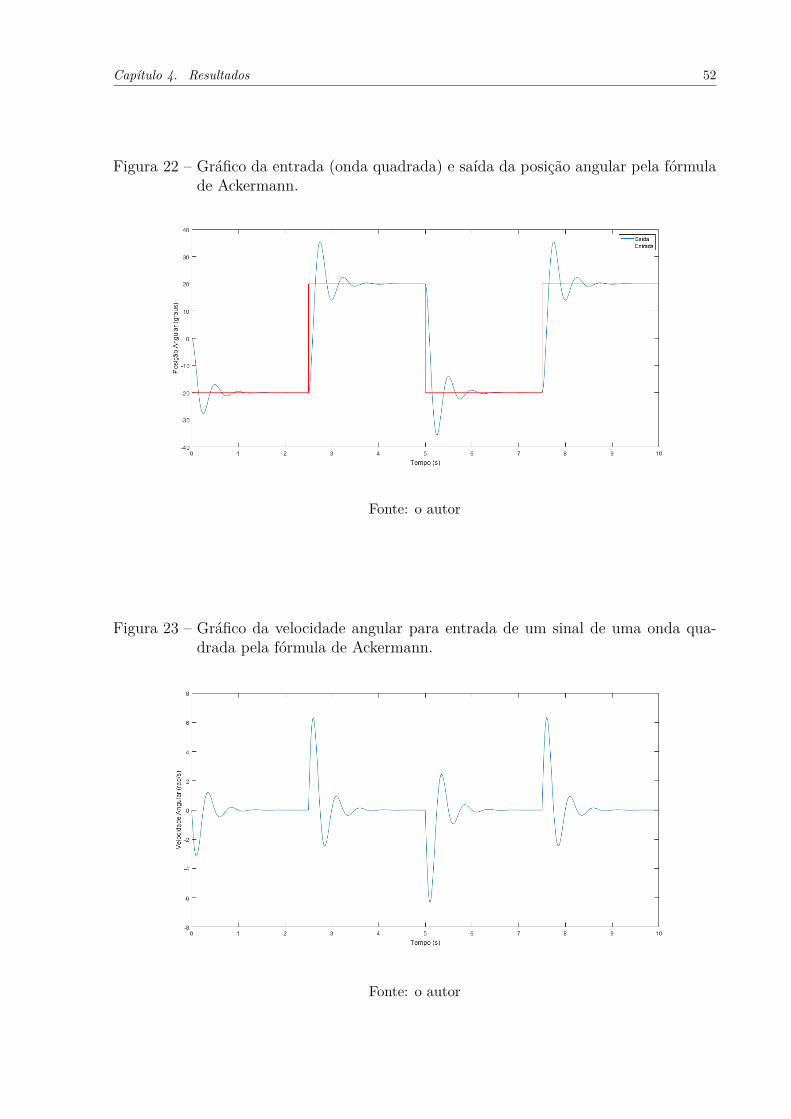
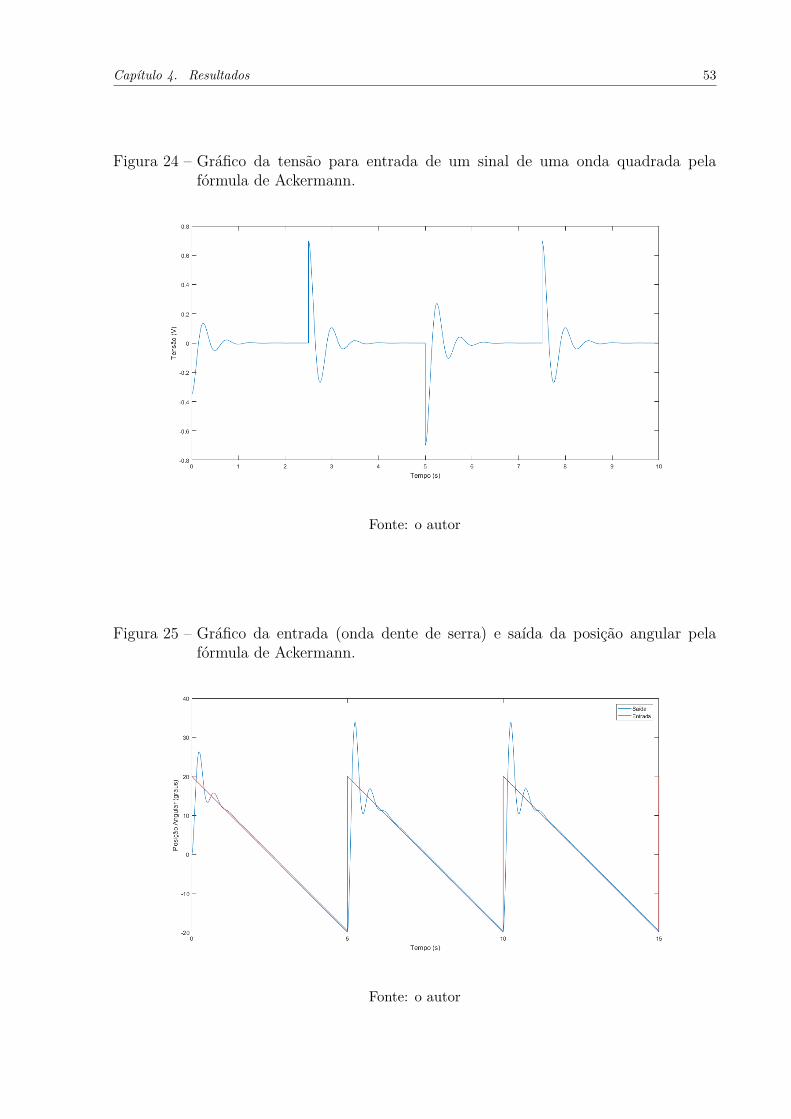
angular e tensão tendo como entrada de referência uma onda dente de serra.Pelas Figuras 19, 22 e 25 observa-se que que houve o rastreamento das referências das
ondas senoidal, quadrada e dente de serra respectivamente.Pelos gráficos das velocidades angulares é possível notar que são de fato a derivada
dos gráficos de seus respectivas posições angulares. E quando comparados com a tensão,é possível notar que a velocidade angular e a tensão possuem o mesmo aspecto, uma vez
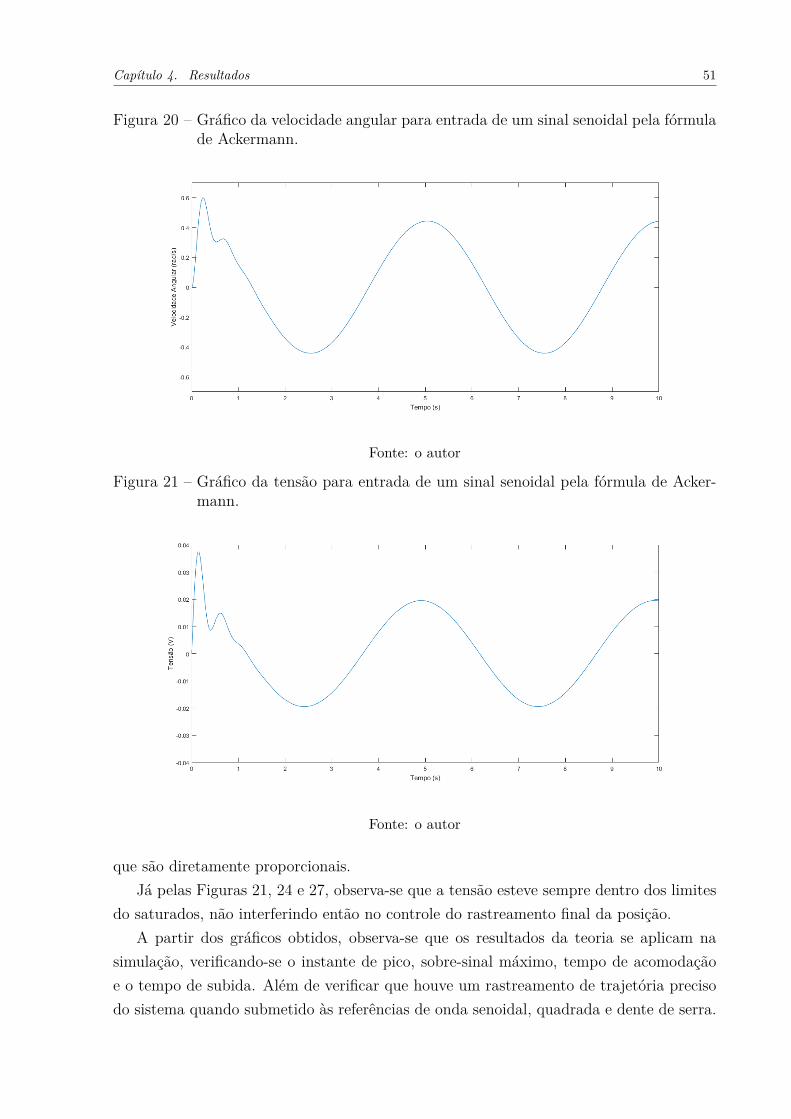
Capítulo 4. Resultados 51
Figura 20 – Gráfico da velocidade angular para entrada de um sinal senoidal pela fórmulade Ackermann.
Fonte: o autor
Figura 21 – Gráfico da tensão para entrada de um sinal senoidal pela fórmula de Acker-mann.
Fonte: o autor
que são diretamente proporcionais.Já pelas Figuras 21, 24 e 27, observa-se que a tensão esteve sempre dentro dos limites
do saturados, não interferindo então no controle do rastreamento final da posição.A partir dos gráficos obtidos, observa-se que os resultados da teoria se aplicam na
simulação, verificando-se o instante de pico, sobre-sinal máximo, tempo de acomodaçãoe o tempo de subida. Além de verificar que houve um rastreamento de trajetória precisodo sistema quando submetido às referências de onda senoidal, quadrada e dente de serra.
Capítulo 4. Resultados 52
Figura 22 – Gráfico da entrada (onda quadrada) e saída da posição angular pela fórmulade Ackermann.
Fonte: o autor
Figura 23 – Gráfico da velocidade angular para entrada de um sinal de uma onda qua-drada pela fórmula de Ackermann.
Fonte: o autor
Capítulo 4. Resultados 53
Figura 24 – Gráfico da tensão para entrada de um sinal de uma onda quadrada pelafórmula de Ackermann.
Fonte: o autor
Figura 25 – Gráfico da entrada (onda dente de serra) e saída da posição angular pelafórmula de Ackermann.
Fonte: o autor

Capítulo 4. Resultados 54
Figura 26 – Gráfico da velocidade angular para entrada de um sinal dente de serra pelafórmula de Ackermann.
Fonte: o autor
Figura 27 – Gráfico da tensão para entrada de um sinal dente de serra pela fórmula deAckermann.
Fonte: o autor
Capítulo 4. Resultados 55
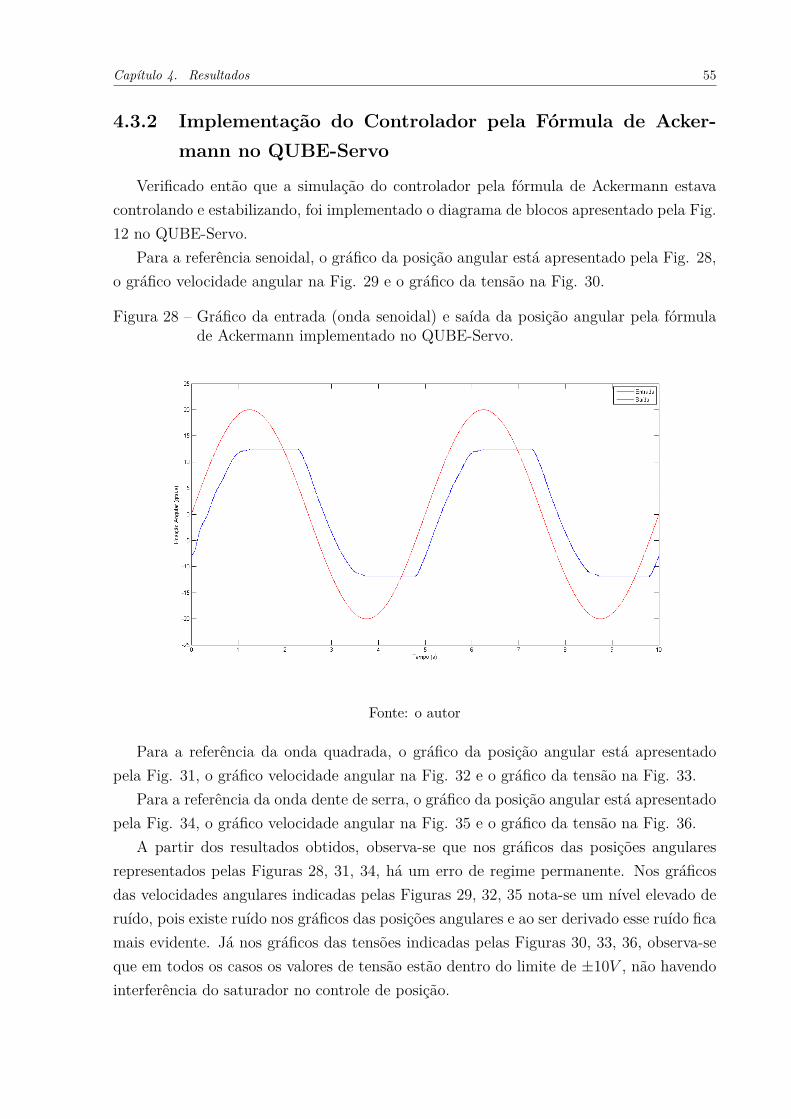
4.3.2 Implementação do Controlador pela Fórmula de Acker-mann no QUBE-Servo
Verificado então que a simulação do controlador pela fórmula de Ackermann estavacontrolando e estabilizando, foi implementado o diagrama de blocos apresentado pela Fig.12 no QUBE-Servo.
Para a referência senoidal, o gráfico da posição angular está apresentado pela Fig. 28,o gráfico velocidade angular na Fig. 29 e o gráfico da tensão na Fig. 30.
Figura 28 – Gráfico da entrada (onda senoidal) e saída da posição angular pela fórmulade Ackermann implementado no QUBE-Servo.
Fonte: o autor
Para a referência da onda quadrada, o gráfico da posição angular está apresentadopela Fig. 31, o gráfico velocidade angular na Fig. 32 e o gráfico da tensão na Fig. 33.
Para a referência da onda dente de serra, o gráfico da posição angular está apresentadopela Fig. 34, o gráfico velocidade angular na Fig. 35 e o gráfico da tensão na Fig. 36.
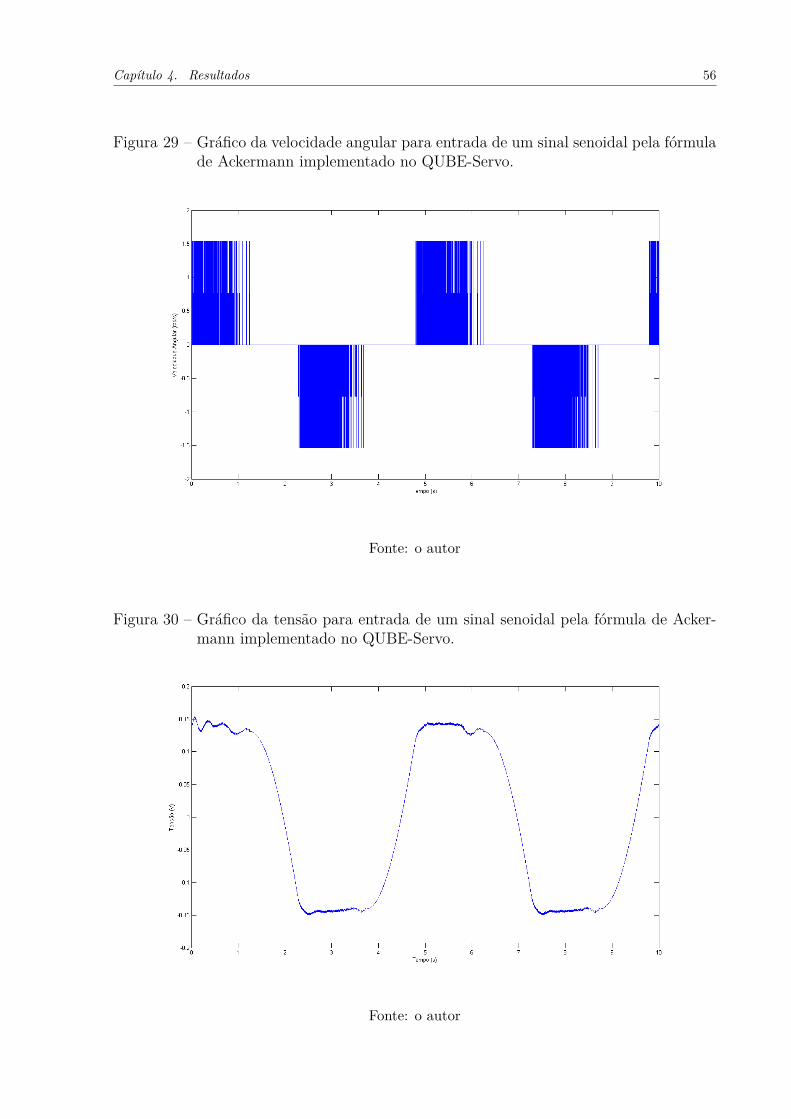
A partir dos resultados obtidos, observa-se que nos gráficos das posições angularesrepresentados pelas Figuras 28, 31, 34, há um erro de regime permanente. Nos gráficosdas velocidades angulares indicadas pelas Figuras 29, 32, 35 nota-se um nível elevado deruído, pois existe ruído nos gráficos das posições angulares e ao ser derivado esse ruído ficamais evidente. Já nos gráficos das tensões indicadas pelas Figuras 30, 33, 36, observa-seque em todos os casos os valores de tensão estão dentro do limite de ±10V , não havendointerferência do saturador no controle de posição.
Capítulo 4. Resultados 56
Figura 29 – Gráfico da velocidade angular para entrada de um sinal senoidal pela fórmulade Ackermann implementado no QUBE-Servo.
Fonte: o autor
Figura 30 – Gráfico da tensão para entrada de um sinal senoidal pela fórmula de Acker-mann implementado no QUBE-Servo.
Fonte: o autor
Capítulo 4. Resultados 57
Figura 31 – Gráfico da entrada (onda quadrada) e saída da posição angular pela fórmulade Ackermann implementado no QUBE-Servo.
Fonte: o autor
Figura 32 – Gráfico da velocidade angular para entrada de um sinal de uma onda qua-drada pela fórmula de Ackermann implementado no QUBE-Servo.
Fonte: o autor
Capítulo 4. Resultados 58
Figura 33 – Gráfico da tensão para entrada de um sinal de uma onda quadrada pelafórmula de Ackermann implementado no QUBE-Servo.
Fonte: o autor
Figura 34 – Gráfico da entrada (onda dente de serra) e saída da posição angular pelafórmula de Ackermann implementado no QUBE-Servo.
Fonte: o autor
Capítulo 4. Resultados 59
Figura 35 – Gráfico da velocidade angular para entrada de um sinal dente de serra pelafórmula de Ackermann implementado no QUBE-Servo.
Fonte: o autor
Figura 36 – Gráfico da tensão para entrada de um sinal dente de serra pela fórmula deAckermann implementado no QUBE-Servo.
Fonte: o autor
Capítulo 4. Resultados 60
4.4 Projeto do Controlador por LMI
4.4.1 Simulação do Controlador por LMI
Para o projeto do controlador por LMI, primeiramente foi obtido o ganho do contro-lador através do código disponibilizado no Apêndice A.
Para montar o código, utilizou-se o comando lmiedit do MATLAB, inserindo as duasLMI’s descritas pelas equações 2.55 e 2.56, conforme mostrado na Fig. 37.
Figura 37 – Especificações das LMIs desejadas no LMI Editor.
Fonte: o autor
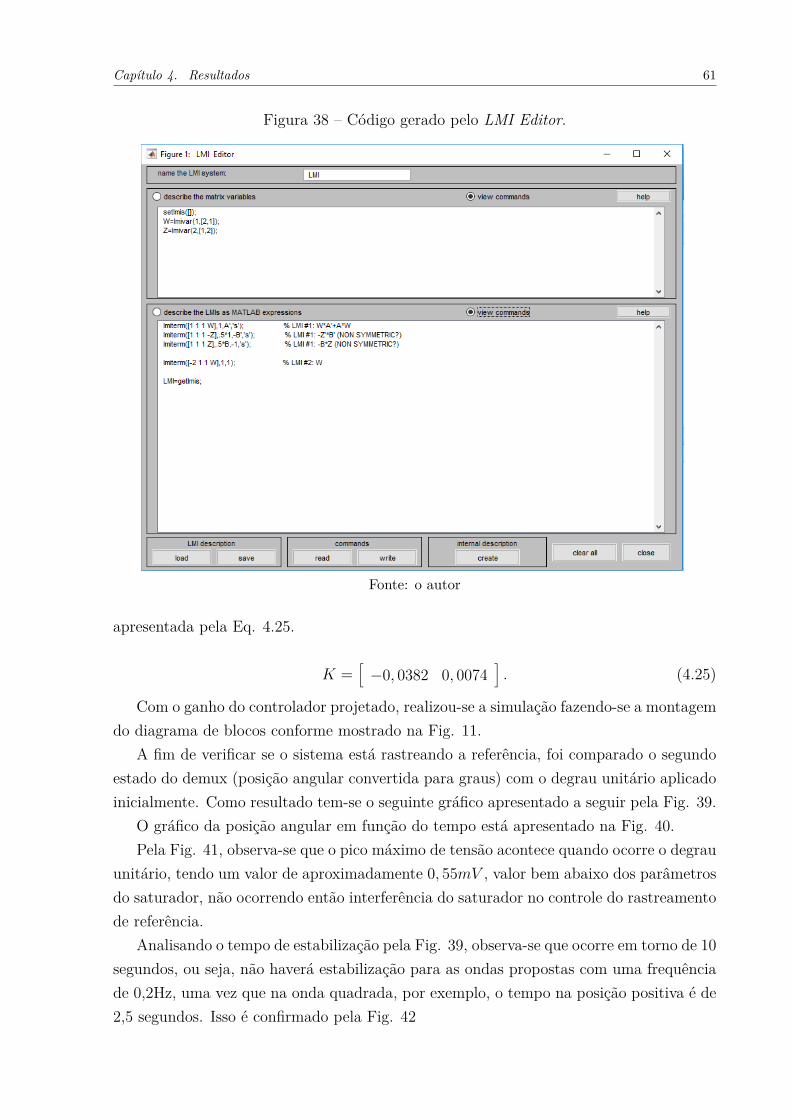
Marcando então as duas caixas de view commands, é exibido o código que declara edescreve as LMI’s desejadas. O trecho de código gerado pelo LMI Editor está apresentadona Fig. 38.
A partir do trecho de código gerado pelo LMI Editor, realizou-se as alterações neces-sárias para obter o ganho (K) do controlador, inserindo no início do código as matrizesA, B, C e D citadas anteriormente, seguido do código gerado pelo LMI Editor, e porfim, obtidas as matrizes W e Z que satisfazem as inequações para finalmente encontrar amatriz de ganho, conforme apresentado no Apêndice A. Obteve-se a matriz de ganho K
Capítulo 4. Resultados 61
Figura 38 – Código gerado pelo LMI Editor.
Fonte: o autor
apresentada pela Eq. 4.25.
K =[−0, 0382 0, 0074
]. (4.25)
Com o ganho do controlador projetado, realizou-se a simulação fazendo-se a montagemdo diagrama de blocos conforme mostrado na Fig. 11.
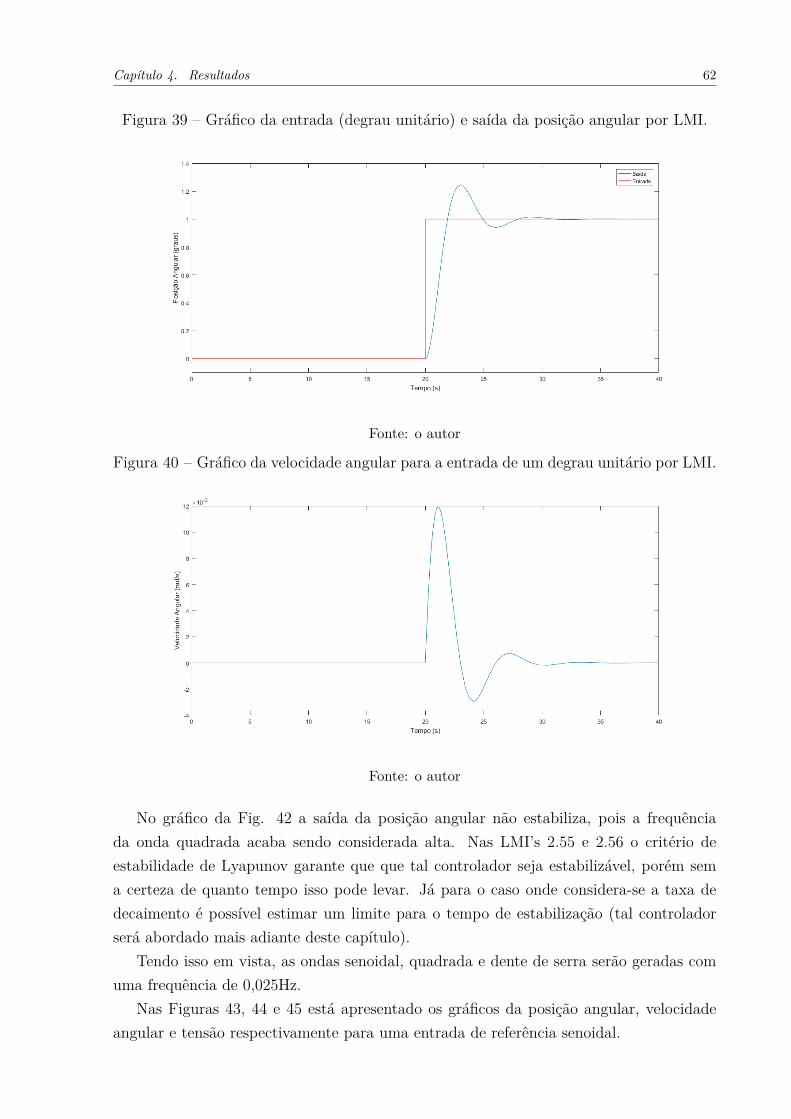
A fim de verificar se o sistema está rastreando a referência, foi comparado o segundoestado do demux (posição angular convertida para graus) com o degrau unitário aplicadoinicialmente. Como resultado tem-se o seguinte gráfico apresentado a seguir pela Fig. 39.
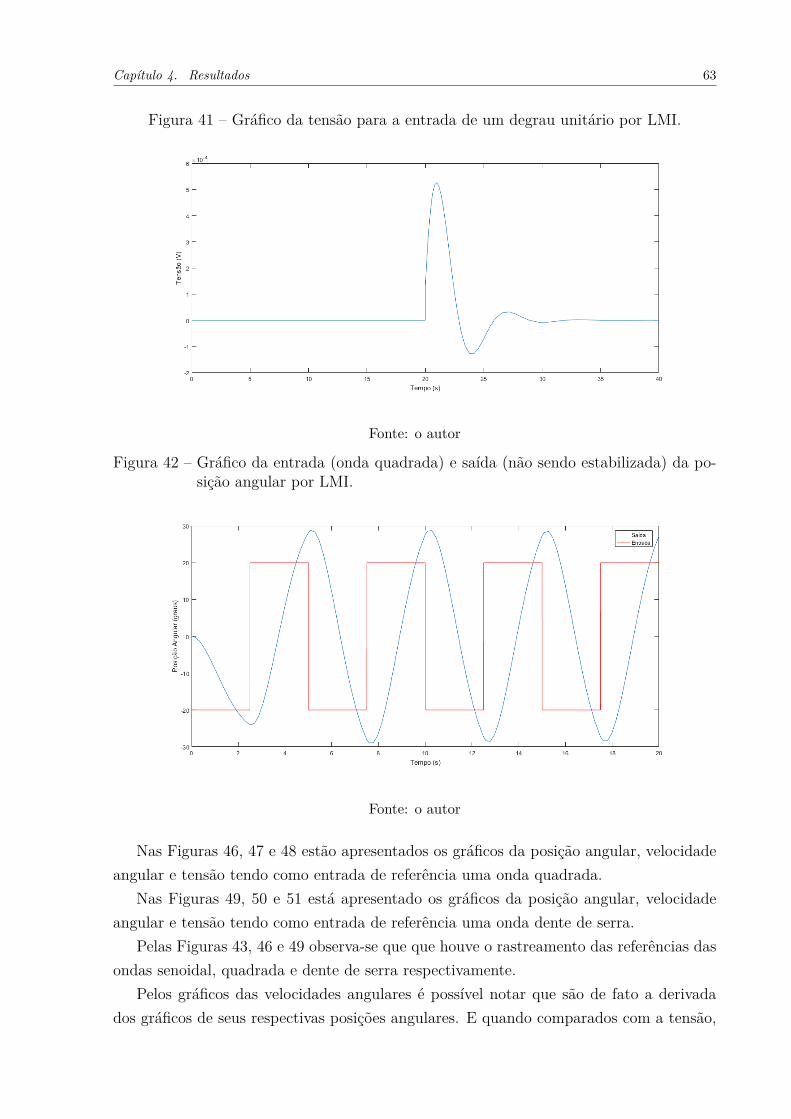
O gráfico da posição angular em função do tempo está apresentado na Fig. 40.Pela Fig. 41, observa-se que o pico máximo de tensão acontece quando ocorre o degrau
unitário, tendo um valor de aproximadamente 0, 55mV , valor bem abaixo dos parâmetrosdo saturador, não ocorrendo então interferência do saturador no controle do rastreamentode referência.
Analisando o tempo de estabilização pela Fig. 39, observa-se que ocorre em torno de 10segundos, ou seja, não haverá estabilização para as ondas propostas com uma frequênciade 0,2Hz, uma vez que na onda quadrada, por exemplo, o tempo na posição positiva é de2,5 segundos. Isso é confirmado pela Fig. 42
Capítulo 4. Resultados 62
Figura 39 – Gráfico da entrada (degrau unitário) e saída da posição angular por LMI.
Fonte: o autor
Figura 40 – Gráfico da velocidade angular para a entrada de um degrau unitário por LMI.
Fonte: o autor
No gráfico da Fig. 42 a saída da posição angular não estabiliza, pois a frequênciada onda quadrada acaba sendo considerada alta. Nas LMI’s 2.55 e 2.56 o critério deestabilidade de Lyapunov garante que que tal controlador seja estabilizável, porém sema certeza de quanto tempo isso pode levar. Já para o caso onde considera-se a taxa dedecaimento é possível estimar um limite para o tempo de estabilização (tal controladorserá abordado mais adiante deste capítulo).
Tendo isso em vista, as ondas senoidal, quadrada e dente de serra serão geradas comuma frequência de 0,025Hz.
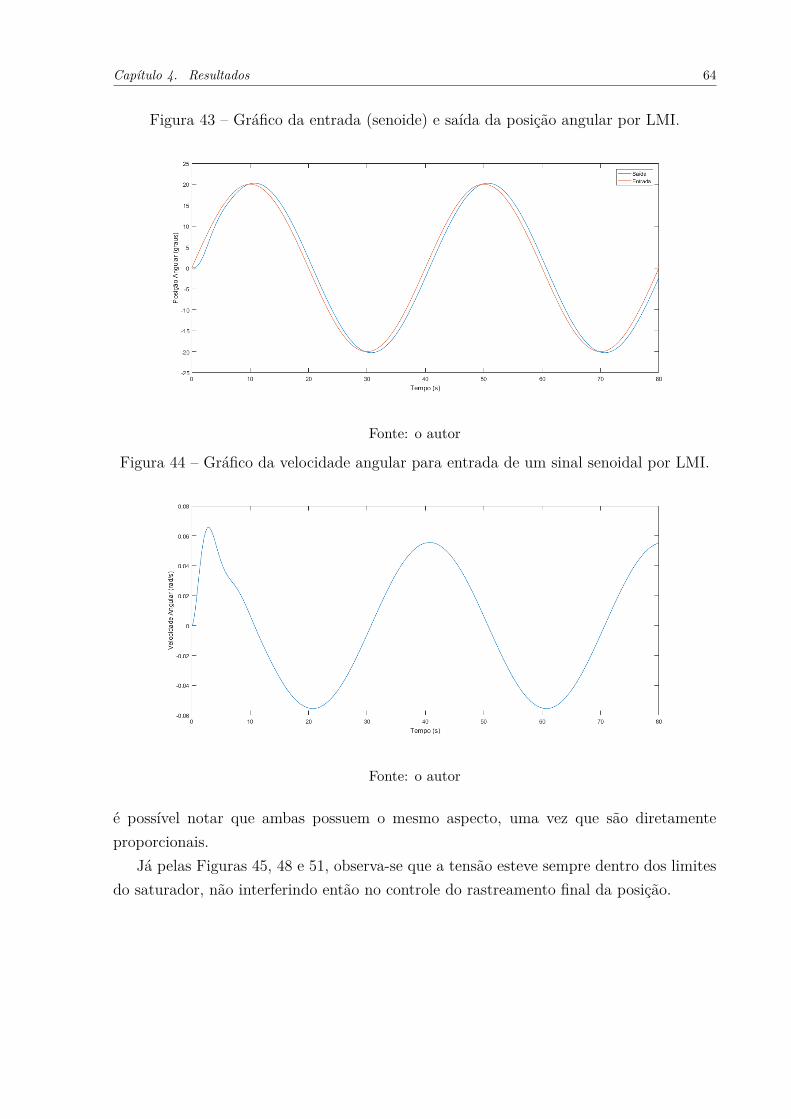
Nas Figuras 43, 44 e 45 está apresentado os gráficos da posição angular, velocidadeangular e tensão respectivamente para uma entrada de referência senoidal.
Capítulo 4. Resultados 63
Figura 41 – Gráfico da tensão para a entrada de um degrau unitário por LMI.
Fonte: o autor
Figura 42 – Gráfico da entrada (onda quadrada) e saída (não sendo estabilizada) da po-sição angular por LMI.
Fonte: o autor
Nas Figuras 46, 47 e 48 estão apresentados os gráficos da posição angular, velocidadeangular e tensão tendo como entrada de referência uma onda quadrada.
Nas Figuras 49, 50 e 51 está apresentado os gráficos da posição angular, velocidadeangular e tensão tendo como entrada de referência uma onda dente de serra.
Pelas Figuras 43, 46 e 49 observa-se que que houve o rastreamento das referências dasondas senoidal, quadrada e dente de serra respectivamente.
Pelos gráficos das velocidades angulares é possível notar que são de fato a derivadados gráficos de seus respectivas posições angulares. E quando comparados com a tensão,
Capítulo 4. Resultados 64
Figura 43 – Gráfico da entrada (senoide) e saída da posição angular por LMI.
Fonte: o autor
Figura 44 – Gráfico da velocidade angular para entrada de um sinal senoidal por LMI.
Fonte: o autor
é possível notar que ambas possuem o mesmo aspecto, uma vez que são diretamenteproporcionais.
Já pelas Figuras 45, 48 e 51, observa-se que a tensão esteve sempre dentro dos limitesdo saturador, não interferindo então no controle do rastreamento final da posição.
Capítulo 4. Resultados 65
Figura 45 – Gráfico da tensão para entrada de um sinal senoidal por LMI.
Fonte: o autor
Figura 46 – Gráfico da entrada (onda quadrada) e saída da posição angular por LMI.
Fonte: o autor
Capítulo 4. Resultados 66
Figura 47 – Gráfico da velocidade angular para entrada de um sinal de uma quadrada porLMI.
Fonte: o autor
Figura 48 – Gráfico da tensão para entrada de um sinal de uma quadrada por LMI.
Fonte: o autor
Capítulo 4. Resultados 67
Figura 49 – Gráfico da entrada (onda dente de serra) e saída da posição angular por LMI.
Fonte: o autor
Figura 50 – Gráfico da velocidade angular para entrada de um sinal dente de serra porLMI.
Fonte: o autor
Capítulo 4. Resultados 68
Figura 51 – Gráfico da tensão para entrada de um sinal dente de serra por LMI.
Fonte: o autor
Capítulo 4. Resultados 69
4.4.2 Implementação do Controlador por LMI no QUBE-Servo
Verificado então que a simulação do controlador por LMI estava controlando e estabi-lizando a posição angular, foi implementado o diagrama de blocos apresentado pela Fig.12 no QUBE-Servo.
Como foi possível verificar nas simulações nos gráficos de tensão apresentados pelasFiguras 45, 48 e 51, os valores máximos de tensão foram aproximadamente de 2, 5mV ,22mV e 22mV respectivamente. Ou seja, foram valores de tensão muito baixos e queforam insuficientes para gerar uma velocidade angular no sistema real, impossibilitandode gerar os gráficos do rastreamento de referência. Isso ficará mais evidente posteriormenteao ser utilizado uma taxa de decaimento γ = 5 no QUBE-Servo.
4.4.3 Simulação do Controlador por LMI considerando a Taxade Decaimento
Para o projeto do controlador por LMI considerando a taxa de decaimento, primeira-mente foi obtido o ganho do controlador semelhantemente ao obtido pelo controlador porLMI, através do código disponibilizado no Apêndice B.
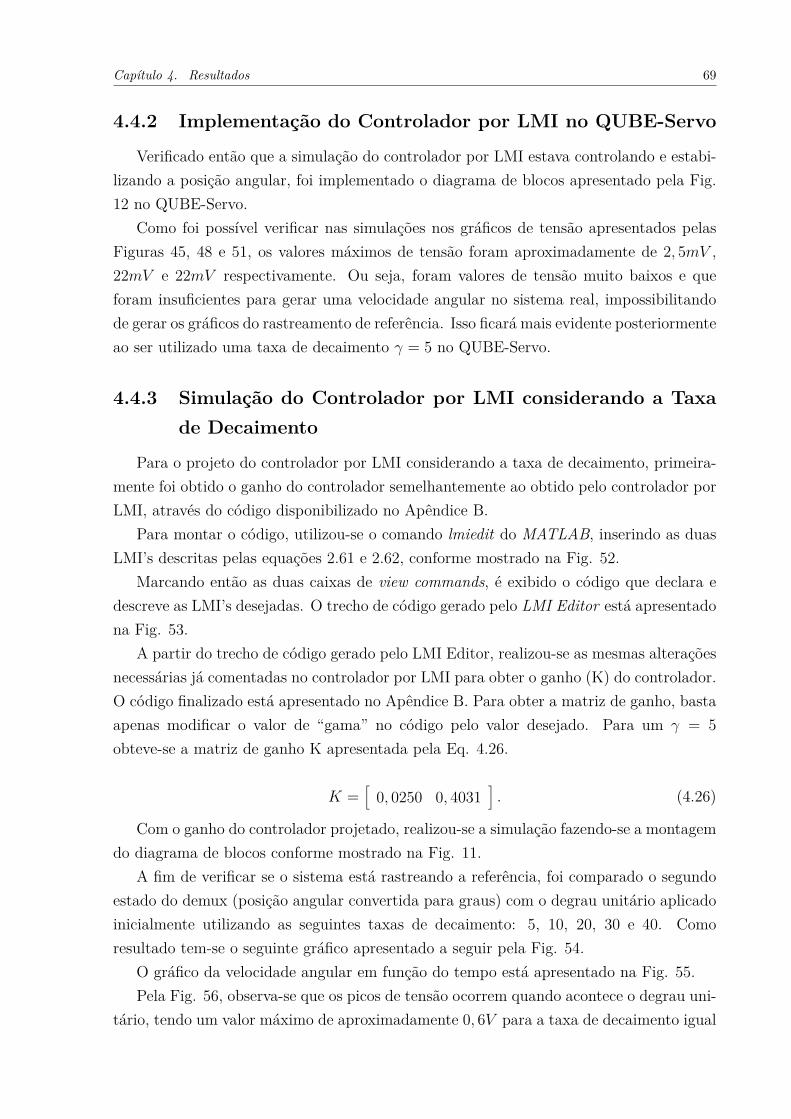
Para montar o código, utilizou-se o comando lmiedit do MATLAB, inserindo as duasLMI’s descritas pelas equações 2.61 e 2.62, conforme mostrado na Fig. 52.
Marcando então as duas caixas de view commands, é exibido o código que declara edescreve as LMI’s desejadas. O trecho de código gerado pelo LMI Editor está apresentadona Fig. 53.
A partir do trecho de código gerado pelo LMI Editor, realizou-se as mesmas alteraçõesnecessárias já comentadas no controlador por LMI para obter o ganho (K) do controlador.O código finalizado está apresentado no Apêndice B. Para obter a matriz de ganho, bastaapenas modificar o valor de “gama” no código pelo valor desejado. Para um γ = 5obteve-se a matriz de ganho K apresentada pela Eq. 4.26.
K =[
0, 0250 0, 4031]. (4.26)
Com o ganho do controlador projetado, realizou-se a simulação fazendo-se a montagemdo diagrama de blocos conforme mostrado na Fig. 11.
A fim de verificar se o sistema está rastreando a referência, foi comparado o segundoestado do demux (posição angular convertida para graus) com o degrau unitário aplicadoinicialmente utilizando as seguintes taxas de decaimento: 5, 10, 20, 30 e 40. Comoresultado tem-se o seguinte gráfico apresentado a seguir pela Fig. 54.
O gráfico da velocidade angular em função do tempo está apresentado na Fig. 55.Pela Fig. 56, observa-se que os picos de tensão ocorrem quando acontece o degrau uni-
tário, tendo um valor máximo de aproximadamente 0, 6V para a taxa de decaimento igual
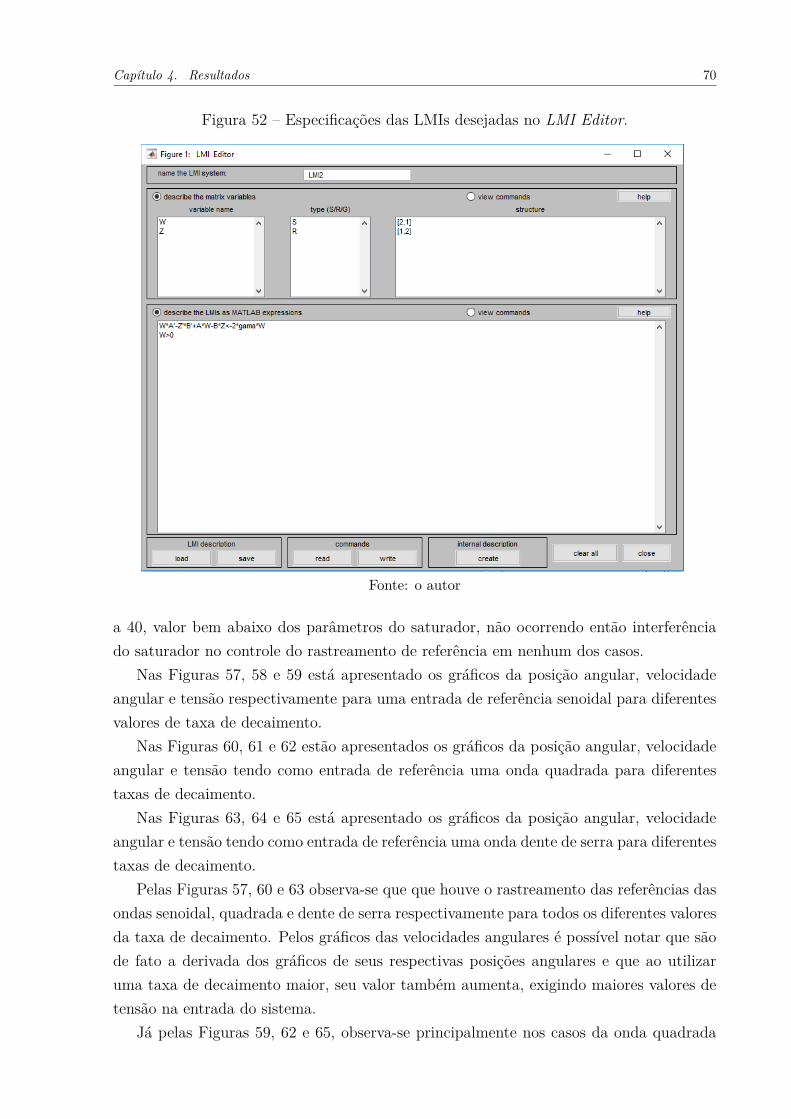
Capítulo 4. Resultados 70
Figura 52 – Especificações das LMIs desejadas no LMI Editor.
Fonte: o autor
a 40, valor bem abaixo dos parâmetros do saturador, não ocorrendo então interferênciado saturador no controle do rastreamento de referência em nenhum dos casos.
Nas Figuras 57, 58 e 59 está apresentado os gráficos da posição angular, velocidadeangular e tensão respectivamente para uma entrada de referência senoidal para diferentesvalores de taxa de decaimento.
Nas Figuras 60, 61 e 62 estão apresentados os gráficos da posição angular, velocidadeangular e tensão tendo como entrada de referência uma onda quadrada para diferentestaxas de decaimento.
Nas Figuras 63, 64 e 65 está apresentado os gráficos da posição angular, velocidadeangular e tensão tendo como entrada de referência uma onda dente de serra para diferentestaxas de decaimento.
Pelas Figuras 57, 60 e 63 observa-se que que houve o rastreamento das referências dasondas senoidal, quadrada e dente de serra respectivamente para todos os diferentes valoresda taxa de decaimento. Pelos gráficos das velocidades angulares é possível notar que sãode fato a derivada dos gráficos de seus respectivas posições angulares e que ao utilizaruma taxa de decaimento maior, seu valor também aumenta, exigindo maiores valores detensão na entrada do sistema.
Já pelas Figuras 59, 62 e 65, observa-se principalmente nos casos da onda quadrada
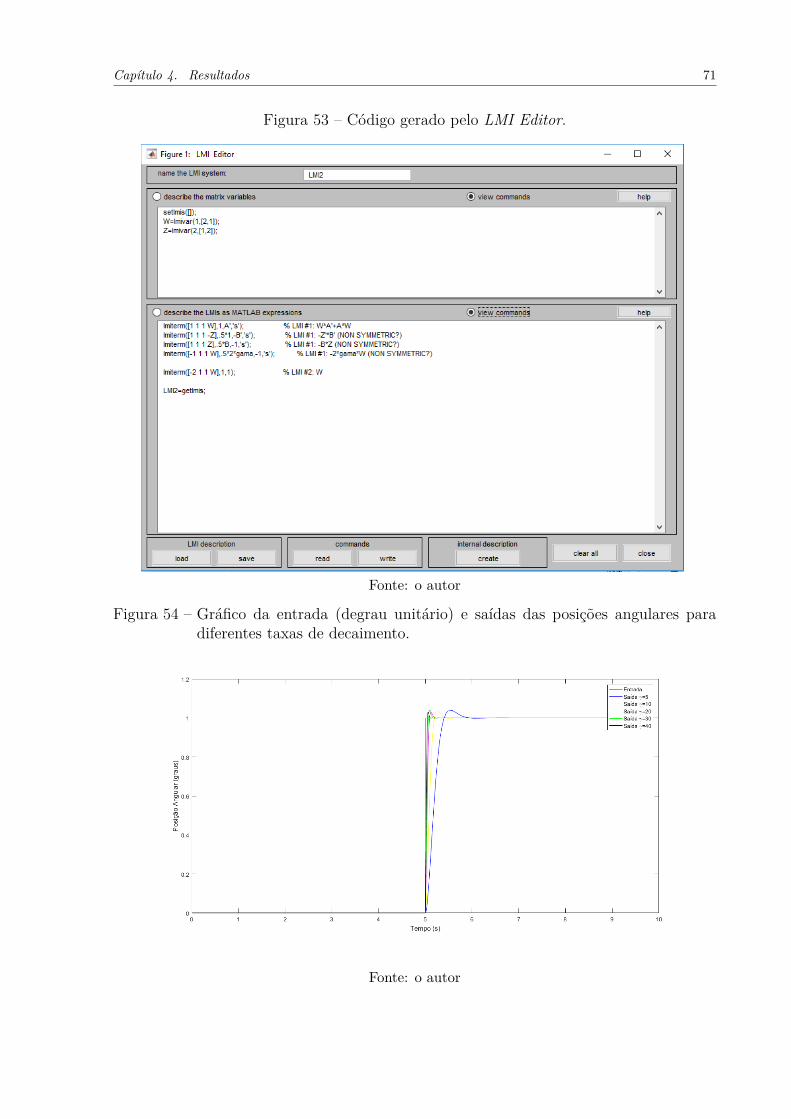
Capítulo 4. Resultados 71
Figura 53 – Código gerado pelo LMI Editor.
Fonte: o autor
Figura 54 – Gráfico da entrada (degrau unitário) e saídas das posições angulares paradiferentes taxas de decaimento.
Fonte: o autor
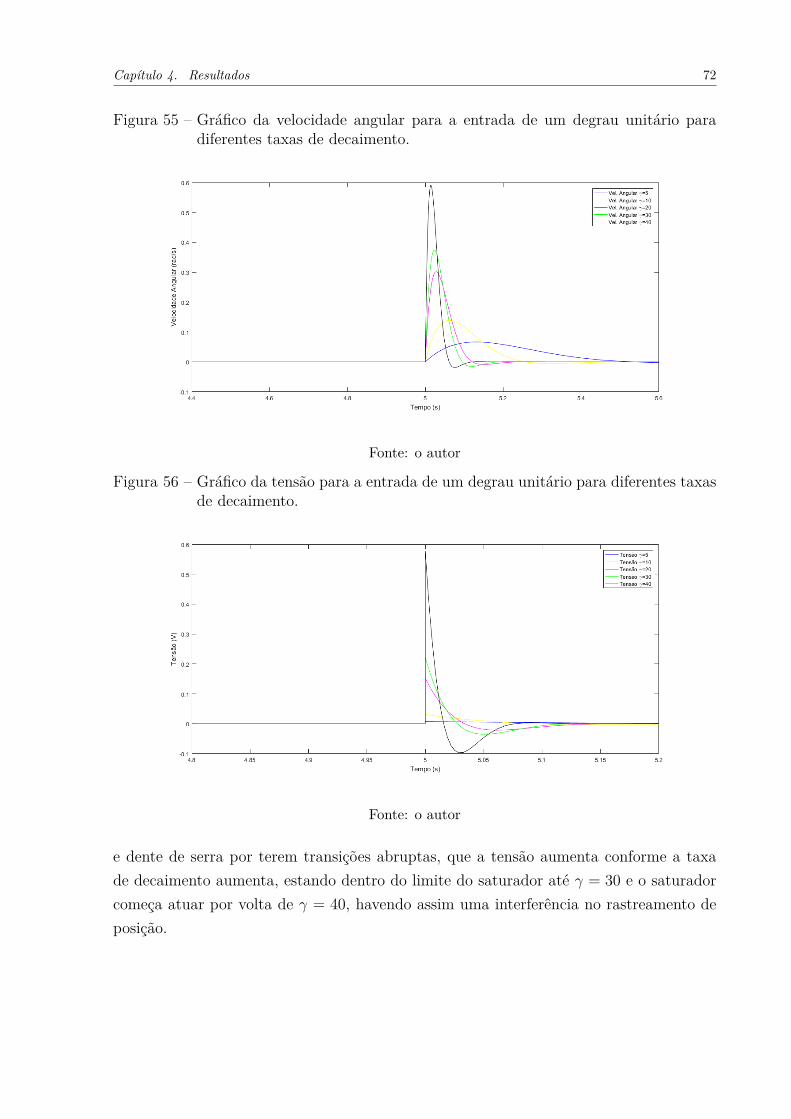
Capítulo 4. Resultados 72
Figura 55 – Gráfico da velocidade angular para a entrada de um degrau unitário paradiferentes taxas de decaimento.
Fonte: o autor
Figura 56 – Gráfico da tensão para a entrada de um degrau unitário para diferentes taxasde decaimento.
Fonte: o autor
e dente de serra por terem transições abruptas, que a tensão aumenta conforme a taxade decaimento aumenta, estando dentro do limite do saturador até γ = 30 e o saturadorcomeça atuar por volta de γ = 40, havendo assim uma interferência no rastreamento deposição.
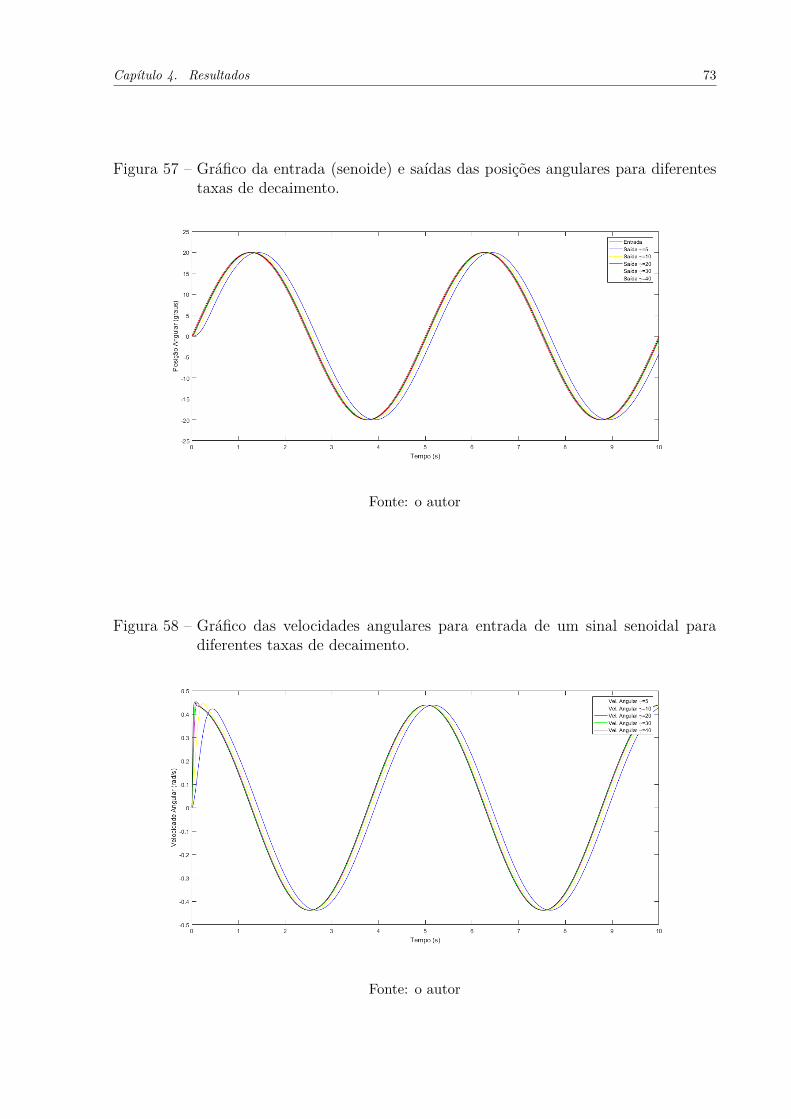
Capítulo 4. Resultados 73
Figura 57 – Gráfico da entrada (senoide) e saídas das posições angulares para diferentestaxas de decaimento.
Fonte: o autor
Figura 58 – Gráfico das velocidades angulares para entrada de um sinal senoidal paradiferentes taxas de decaimento.
Fonte: o autor
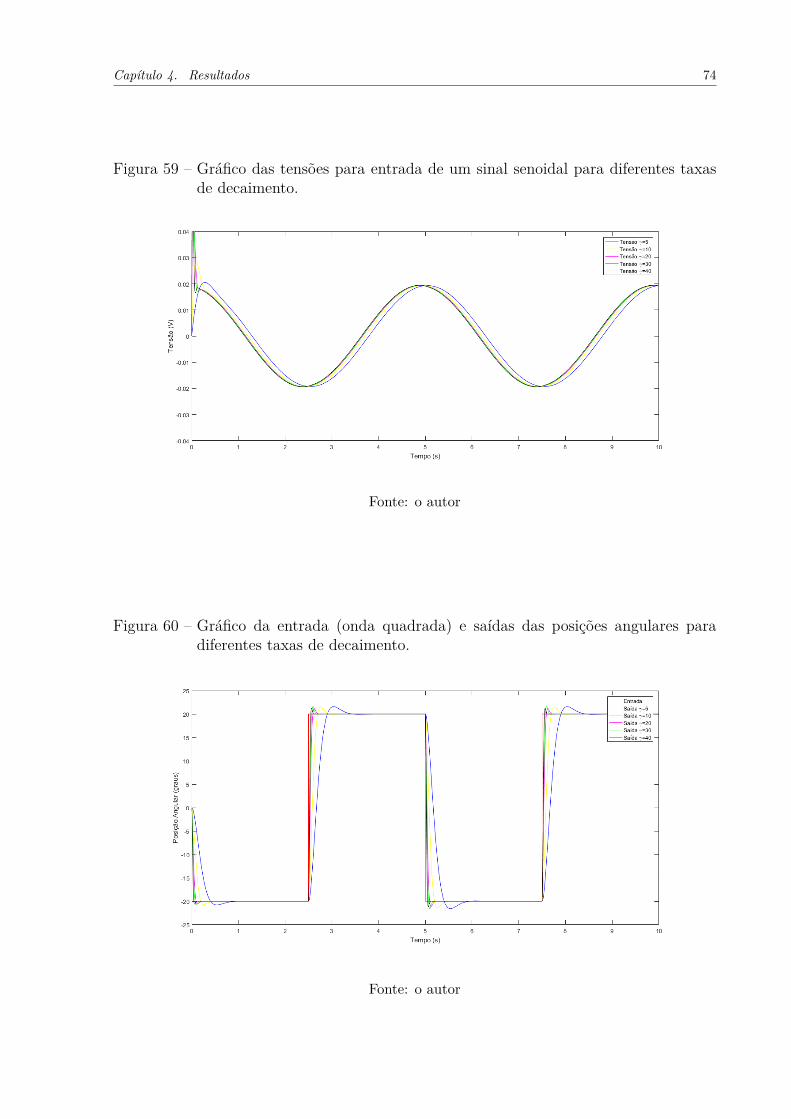
Capítulo 4. Resultados 74
Figura 59 – Gráfico das tensões para entrada de um sinal senoidal para diferentes taxasde decaimento.
Fonte: o autor
Figura 60 – Gráfico da entrada (onda quadrada) e saídas das posições angulares paradiferentes taxas de decaimento.
Fonte: o autor
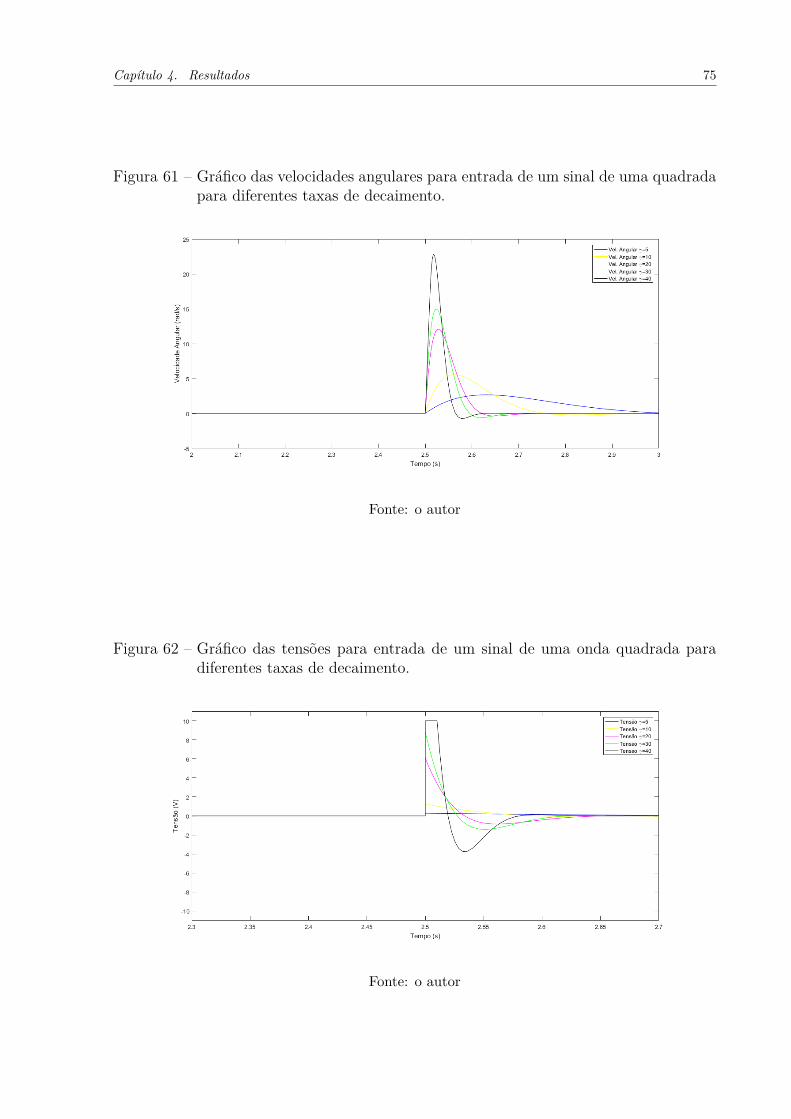
Capítulo 4. Resultados 75
Figura 61 – Gráfico das velocidades angulares para entrada de um sinal de uma quadradapara diferentes taxas de decaimento.
Fonte: o autor
Figura 62 – Gráfico das tensões para entrada de um sinal de uma onda quadrada paradiferentes taxas de decaimento.
Fonte: o autor
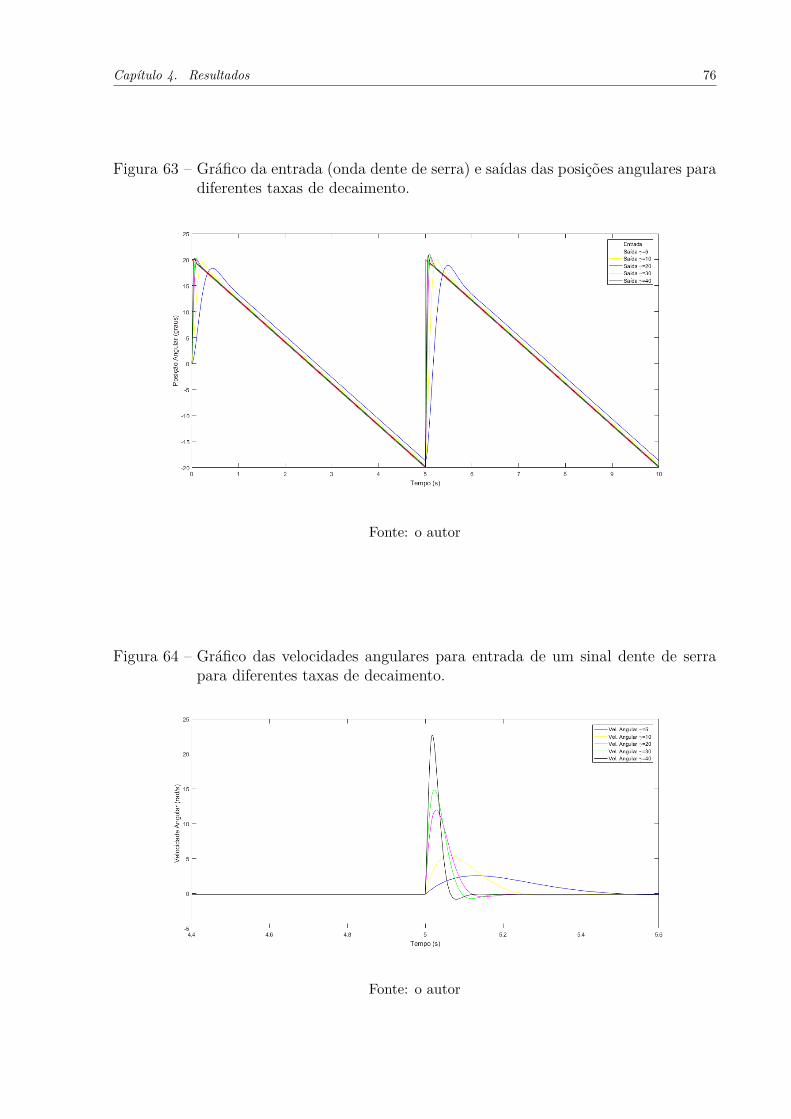
Capítulo 4. Resultados 76
Figura 63 – Gráfico da entrada (onda dente de serra) e saídas das posições angulares paradiferentes taxas de decaimento.
Fonte: o autor
Figura 64 – Gráfico das velocidades angulares para entrada de um sinal dente de serrapara diferentes taxas de decaimento.
Fonte: o autor
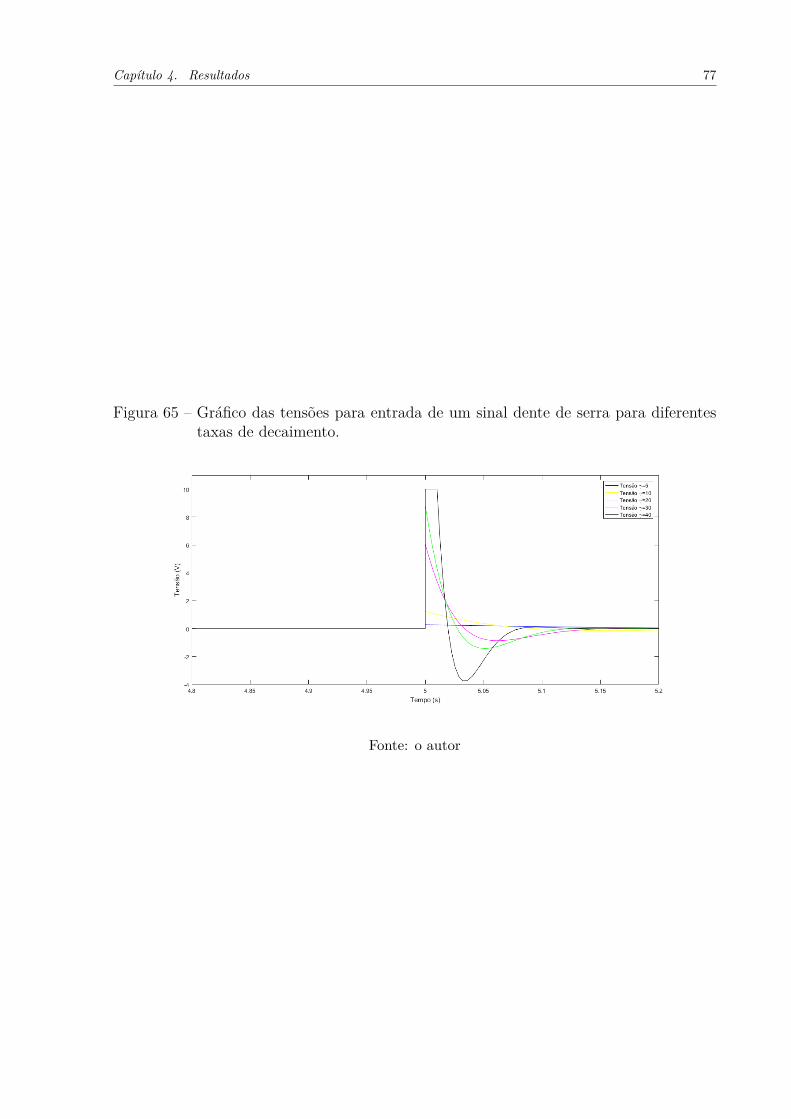
Capítulo 4. Resultados 77
Figura 65 – Gráfico das tensões para entrada de um sinal dente de serra para diferentestaxas de decaimento.
Fonte: o autor
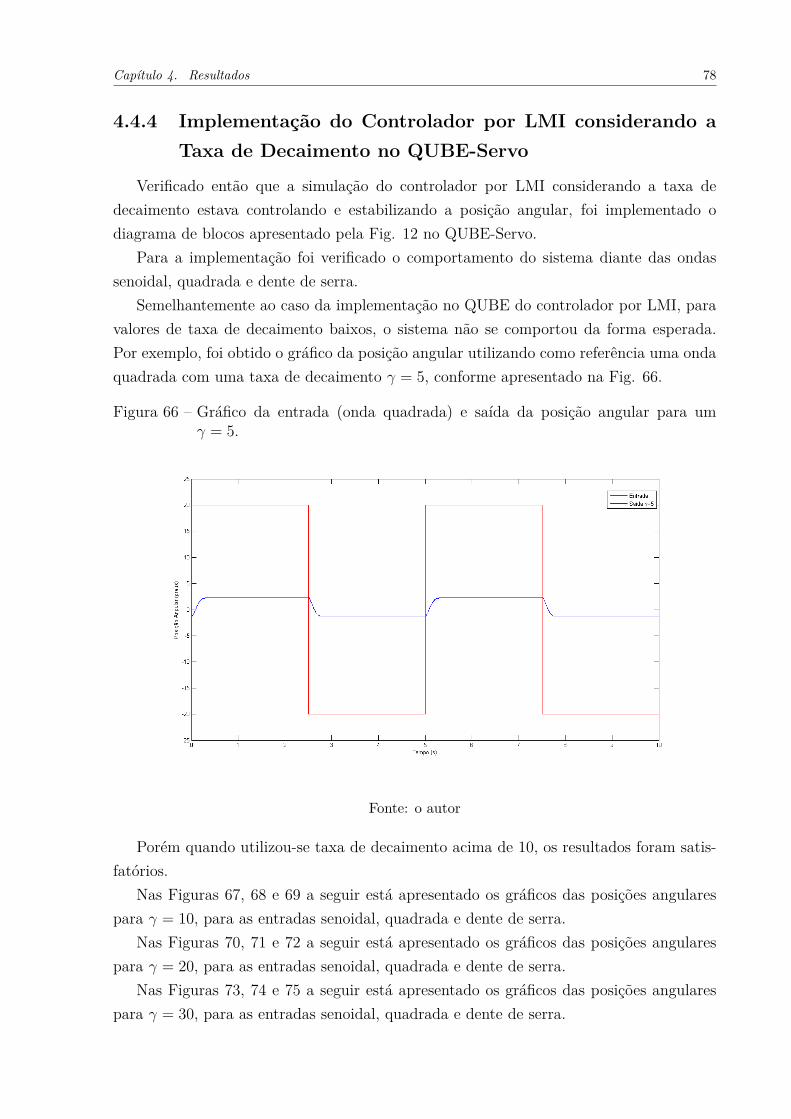
Capítulo 4. Resultados 78
4.4.4 Implementação do Controlador por LMI considerando aTaxa de Decaimento no QUBE-Servo
Verificado então que a simulação do controlador por LMI considerando a taxa dedecaimento estava controlando e estabilizando a posição angular, foi implementado odiagrama de blocos apresentado pela Fig. 12 no QUBE-Servo.
Para a implementação foi verificado o comportamento do sistema diante das ondassenoidal, quadrada e dente de serra.
Semelhantemente ao caso da implementação no QUBE do controlador por LMI, paravalores de taxa de decaimento baixos, o sistema não se comportou da forma esperada.Por exemplo, foi obtido o gráfico da posição angular utilizando como referência uma ondaquadrada com uma taxa de decaimento γ = 5, conforme apresentado na Fig. 66.
Figura 66 – Gráfico da entrada (onda quadrada) e saída da posição angular para umγ = 5.
Fonte: o autor
Porém quando utilizou-se taxa de decaimento acima de 10, os resultados foram satis-fatórios.
Nas Figuras 67, 68 e 69 a seguir está apresentado os gráficos das posições angularespara γ = 10, para as entradas senoidal, quadrada e dente de serra.
Nas Figuras 70, 71 e 72 a seguir está apresentado os gráficos das posições angularespara γ = 20, para as entradas senoidal, quadrada e dente de serra.
Nas Figuras 73, 74 e 75 a seguir está apresentado os gráficos das posições angularespara γ = 30, para as entradas senoidal, quadrada e dente de serra.
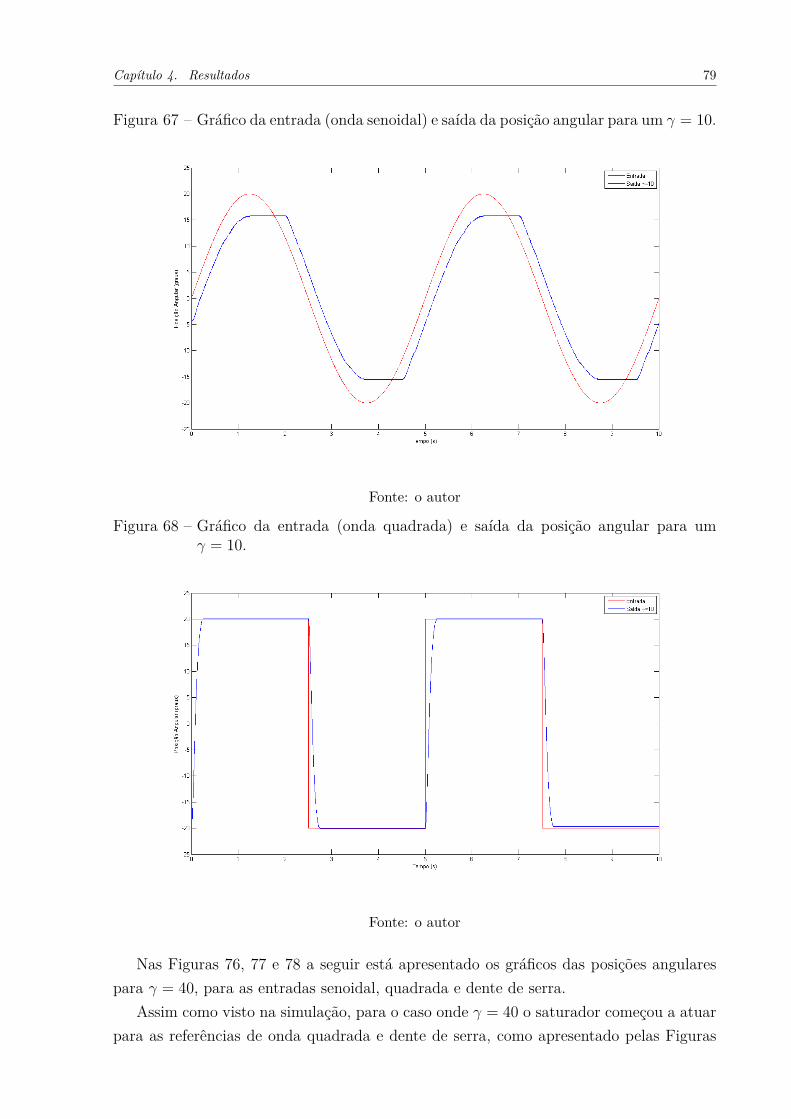
Capítulo 4. Resultados 79
Figura 67 – Gráfico da entrada (onda senoidal) e saída da posição angular para um γ = 10.
Fonte: o autor
Figura 68 – Gráfico da entrada (onda quadrada) e saída da posição angular para umγ = 10.
Fonte: o autor
Nas Figuras 76, 77 e 78 a seguir está apresentado os gráficos das posições angularespara γ = 40, para as entradas senoidal, quadrada e dente de serra.
Assim como visto na simulação, para o caso onde γ = 40 o saturador começou a atuarpara as referências de onda quadrada e dente de serra, como apresentado pelas Figuras
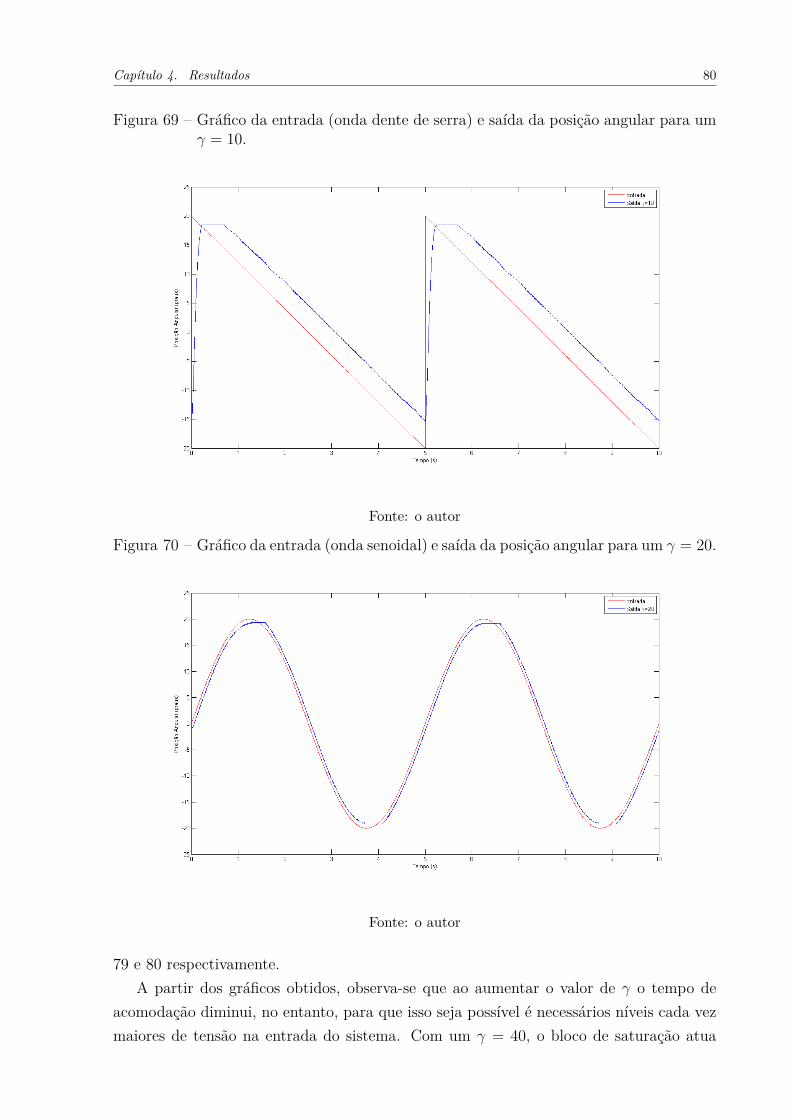
Capítulo 4. Resultados 80
Figura 69 – Gráfico da entrada (onda dente de serra) e saída da posição angular para umγ = 10.
Fonte: o autor
Figura 70 – Gráfico da entrada (onda senoidal) e saída da posição angular para um γ = 20.
Fonte: o autor
79 e 80 respectivamente.A partir dos gráficos obtidos, observa-se que ao aumentar o valor de γ o tempo de
acomodação diminui, no entanto, para que isso seja possível é necessários níveis cada vezmaiores de tensão na entrada do sistema. Com um γ = 40, o bloco de saturação atua
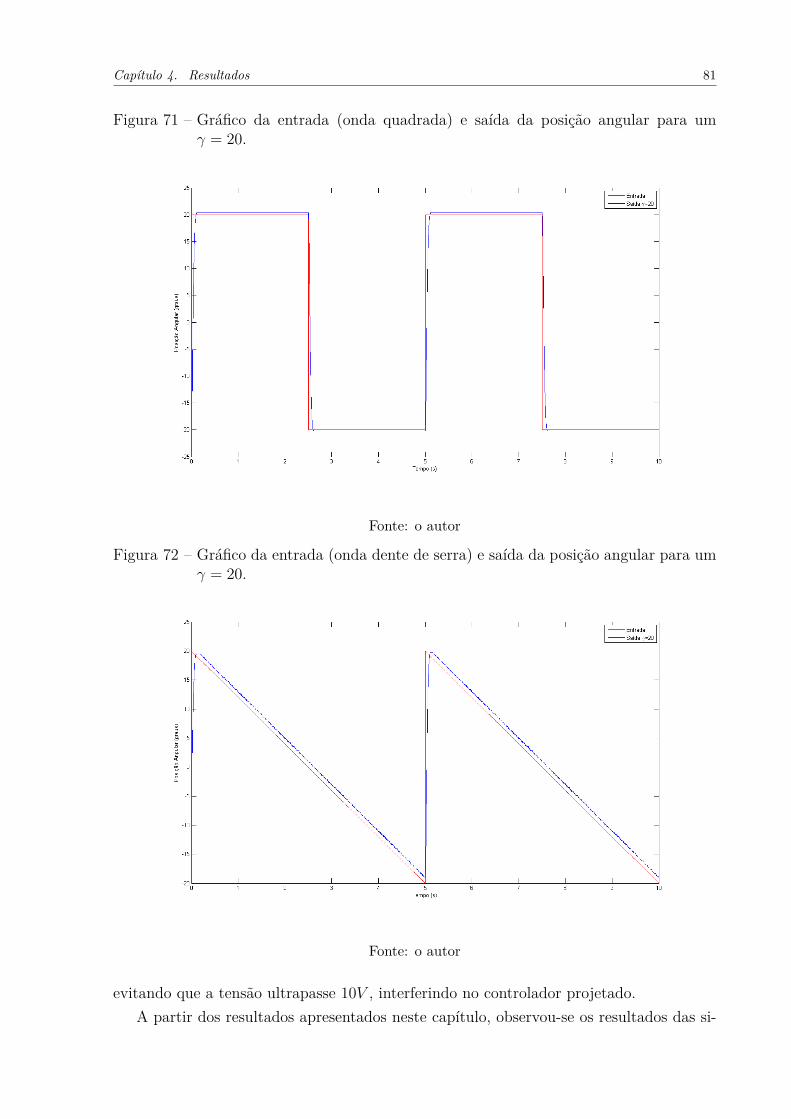
Capítulo 4. Resultados 81
Figura 71 – Gráfico da entrada (onda quadrada) e saída da posição angular para umγ = 20.
Fonte: o autor
Figura 72 – Gráfico da entrada (onda dente de serra) e saída da posição angular para umγ = 20.
Fonte: o autor
evitando que a tensão ultrapasse 10V , interferindo no controlador projetado.A partir dos resultados apresentados neste capítulo, observou-se os resultados das si-
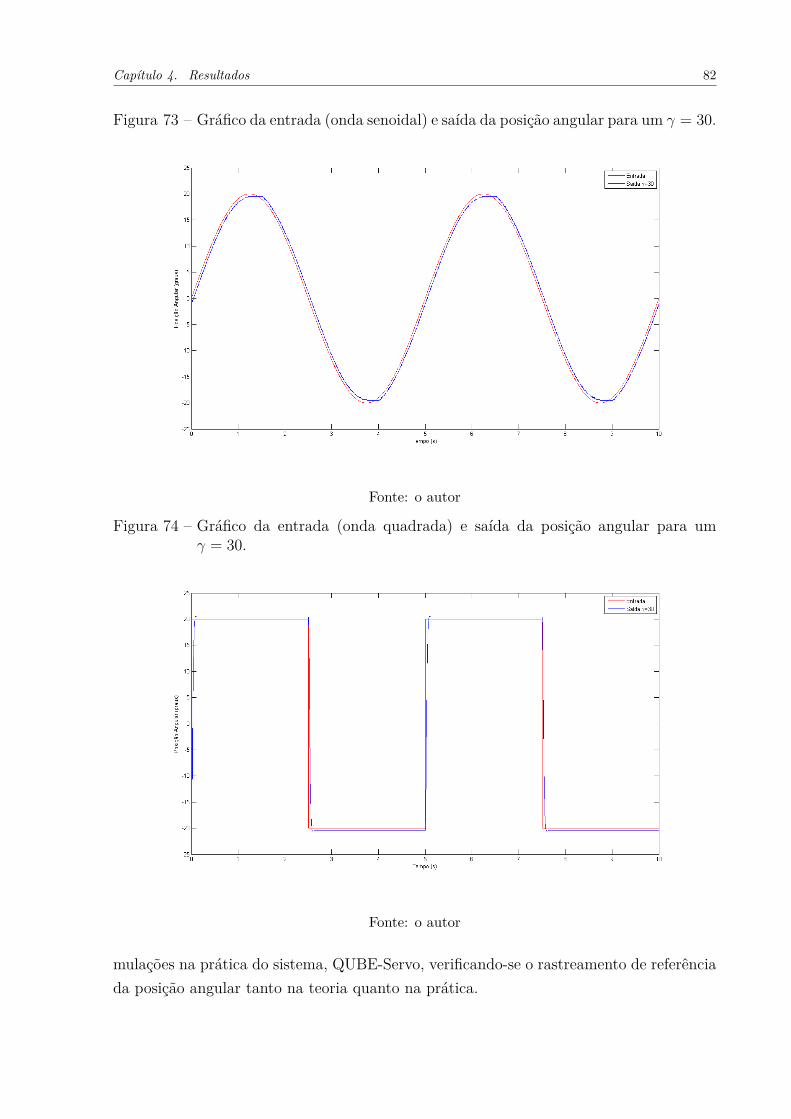
Capítulo 4. Resultados 82
Figura 73 – Gráfico da entrada (onda senoidal) e saída da posição angular para um γ = 30.
Fonte: o autor
Figura 74 – Gráfico da entrada (onda quadrada) e saída da posição angular para umγ = 30.
Fonte: o autor
mulações na prática do sistema, QUBE-Servo, verificando-se o rastreamento de referênciada posição angular tanto na teoria quanto na prática.
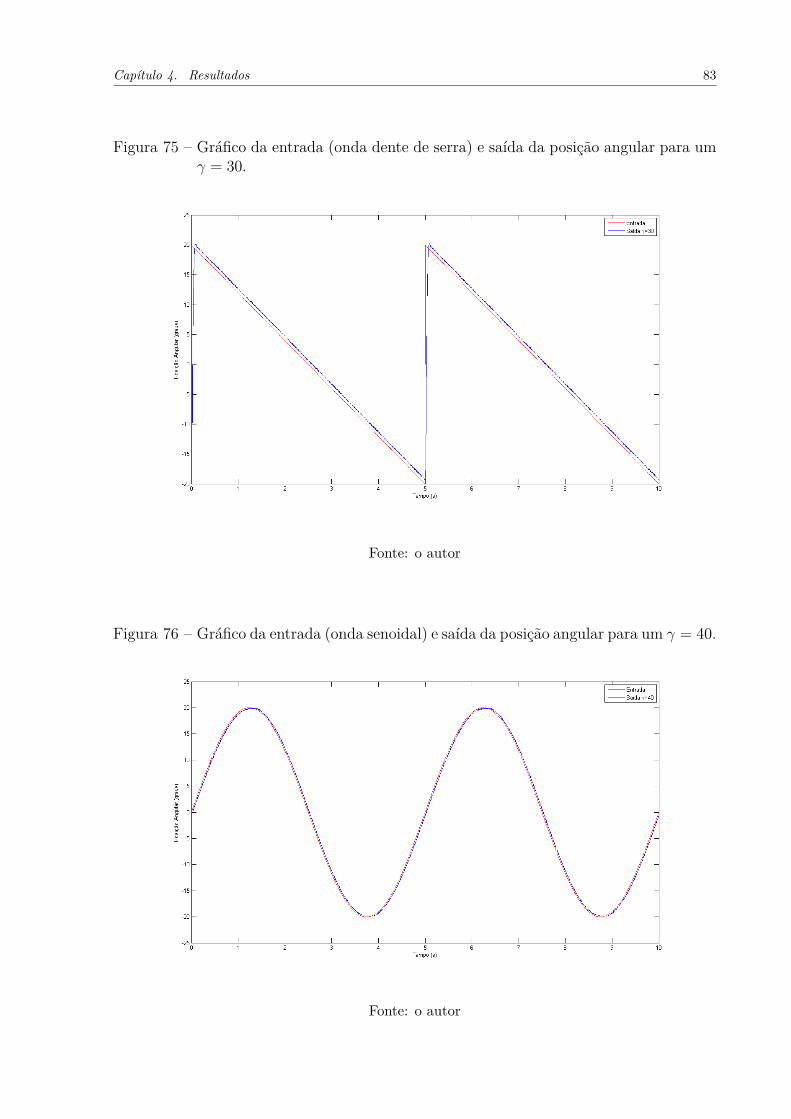
Capítulo 4. Resultados 83
Figura 75 – Gráfico da entrada (onda dente de serra) e saída da posição angular para umγ = 30.
Fonte: o autor
Figura 76 – Gráfico da entrada (onda senoidal) e saída da posição angular para um γ = 40.
Fonte: o autor
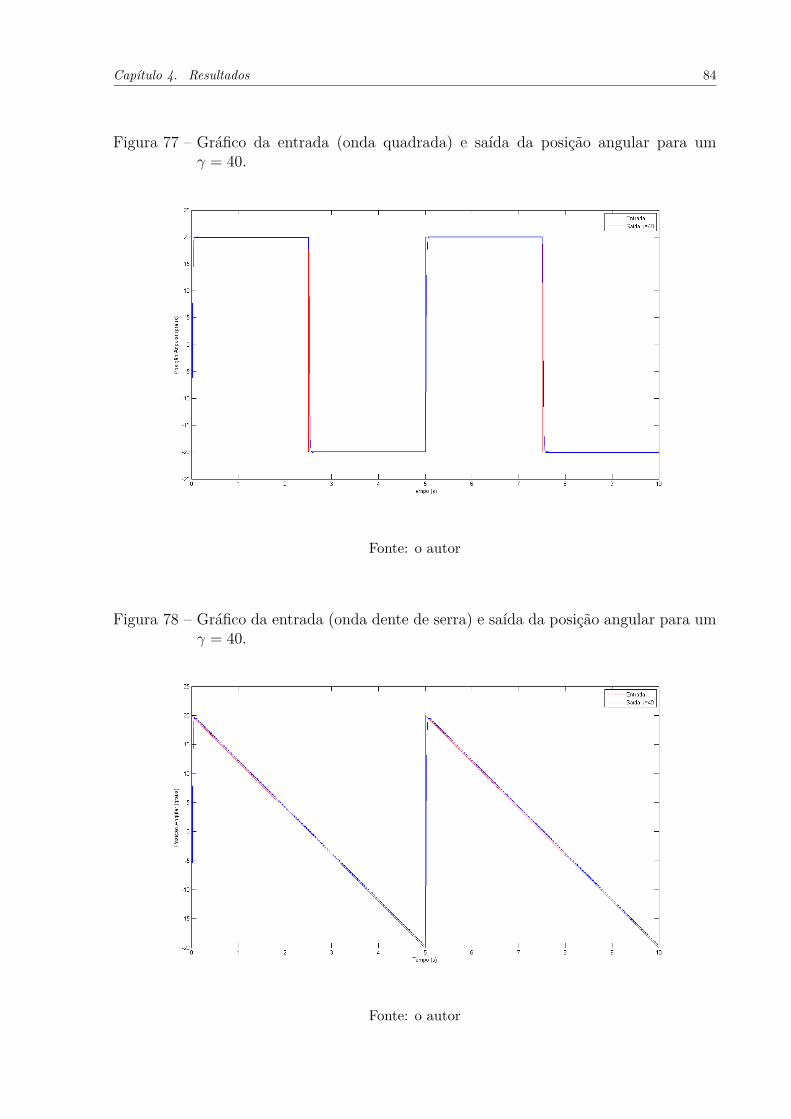
Capítulo 4. Resultados 84
Figura 77 – Gráfico da entrada (onda quadrada) e saída da posição angular para umγ = 40.
Fonte: o autor
Figura 78 – Gráfico da entrada (onda dente de serra) e saída da posição angular para umγ = 40.
Fonte: o autor
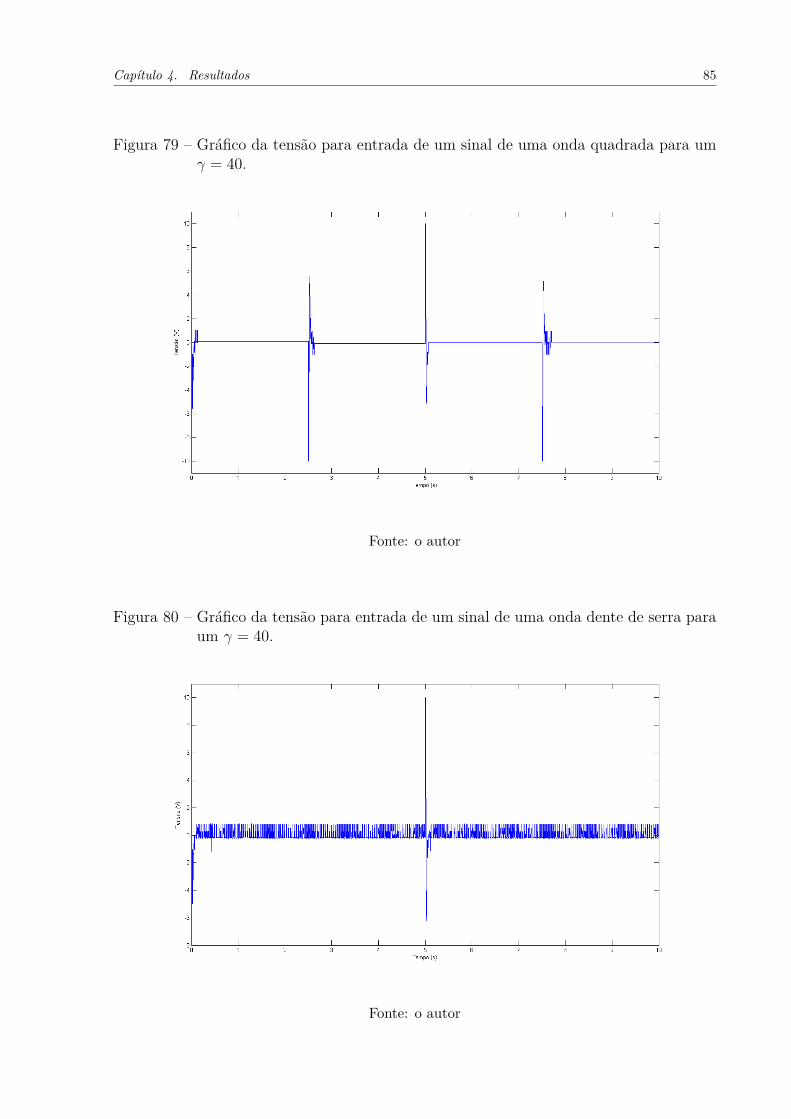
Capítulo 4. Resultados 85
Figura 79 – Gráfico da tensão para entrada de um sinal de uma onda quadrada para umγ = 40.
Fonte: o autor
Figura 80 – Gráfico da tensão para entrada de um sinal de uma onda dente de serra paraum γ = 40.
Fonte: o autor
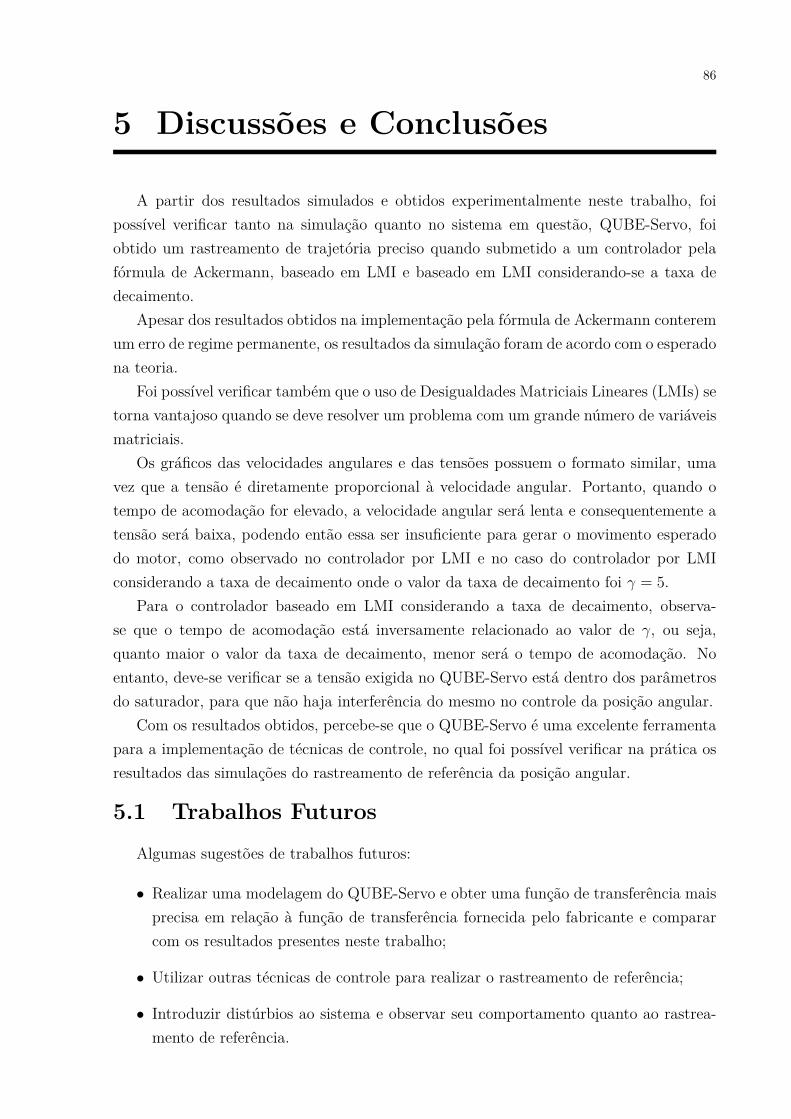
86
5 Discussões e Conclusões
A partir dos resultados simulados e obtidos experimentalmente neste trabalho, foipossível verificar tanto na simulação quanto no sistema em questão, QUBE-Servo, foiobtido um rastreamento de trajetória preciso quando submetido a um controlador pelafórmula de Ackermann, baseado em LMI e baseado em LMI considerando-se a taxa dedecaimento.
Apesar dos resultados obtidos na implementação pela fórmula de Ackermann conteremum erro de regime permanente, os resultados da simulação foram de acordo com o esperadona teoria.
Foi possível verificar também que o uso de Desigualdades Matriciais Lineares (LMIs) setorna vantajoso quando se deve resolver um problema com um grande número de variáveismatriciais.
Os gráficos das velocidades angulares e das tensões possuem o formato similar, umavez que a tensão é diretamente proporcional à velocidade angular. Portanto, quando otempo de acomodação for elevado, a velocidade angular será lenta e consequentemente atensão será baixa, podendo então essa ser insuficiente para gerar o movimento esperadodo motor, como observado no controlador por LMI e no caso do controlador por LMIconsiderando a taxa de decaimento onde o valor da taxa de decaimento foi γ = 5.
Para o controlador baseado em LMI considerando a taxa de decaimento, observa-se que o tempo de acomodação está inversamente relacionado ao valor de γ, ou seja,quanto maior o valor da taxa de decaimento, menor será o tempo de acomodação. Noentanto, deve-se verificar se a tensão exigida no QUBE-Servo está dentro dos parâmetrosdo saturador, para que não haja interferência do mesmo no controle da posição angular.
Com os resultados obtidos, percebe-se que o QUBE-Servo é uma excelente ferramentapara a implementação de técnicas de controle, no qual foi possível verificar na prática osresultados das simulações do rastreamento de referência da posição angular.
5.1 Trabalhos Futuros
Algumas sugestões de trabalhos futuros:
• Realizar uma modelagem do QUBE-Servo e obter uma função de transferência maisprecisa em relação à função de transferência fornecida pelo fabricante e compararcom os resultados presentes neste trabalho;
• Utilizar outras técnicas de controle para realizar o rastreamento de referência;
• Introduzir distúrbios ao sistema e observar seu comportamento quanto ao rastrea-mento de referência.
Capítulo 5. Discussões e Conclusões 87
• Simular e implementar controle de velocidade do sistema QUBE-Servo.
88
Referências
AGUIRRE, L. A. Enciclopédia de Automática: Controle e Automação. São Paulo -Brasil: Editora BLUCHER, 2007. 35
APKARIAN, J.; LEVIS, M. STUDENT WORKBOOK. Ontario - Canada: Quanser Inc,2013. 17, 26
BOYD, S. et al. Linear Matrix Inequalities in System and Control Theory. Philadelphia:SIAM, 1994. 34, 35, 37
CAMPOS, P. R. B. de. Erro em regime permanente em sistema de controle comrealimentação unitária. 2017. Acesso em: 15 de dezembro de 2017. Disponível em:<http://paginapessoal.utfpr.edu.br/brero/controle_1/material-didatico/erro_regime_05.pdf>. 21, 22
DORF, R. C.; BISHOP, R. H. Sistemas de Controle Modernos. Rio de Janeiro - Brasil:LTC Editora, 1998. 37-43 p. 20, 22, 27, 29, 33
FRANKLIN, G. F.; POWELL, J. D.; EMAMI-NAEINI, A. Sistemas de Controle paraEngenharia. Porto Alegre - Brasil: Bookman, 2013. 20, 21, 22
FUENTES, R. C. Apostila de Automação Industrial. [S.l.]: Universidade Federal deSanta Maria (UFSM), 2005. 17
NEGRAO, J. L. Análise matemática e técnicas de controle aplicadas ao pêndulorotacional invertido. Universidade Estadual de Londrina (UEL), 2013. 35
NISE, N. S. Engenharia de Sistemas de Controle. Rio de Janeiro - Brasil: LTC, 2013.30, 32
OGATA, K. Engenharia de Controle Modernos. [S.l.]: Pearson, 2003. 17, 20, 27, 45
PINHEIRO, J. R. Função de Transferência de um Motor CC. 2008. Acesso em: 05de dezembro de 2017. Disponível em: <http://coral.ufsm.br/gepoc/renes/Templates/arquivos/elc1031/ELC1031.L2.5.pdf>. 23, 25
QUANSER. Quick Start Guide: QUBE-Servo Direct I/O Interface. Ontario - Canada:Quanser Inc, 2013. 26, 39
RAHMAN, M. A. et al. Nonlinear control of interior permanent-magnet synchronousmotor. IEEE Transactions on Industry Applications, Vol. 39, No. 2, 2003. 21
SKOGESTAD, S.; POSTLETHWAITE, I. Multivariable Feedback Control: Analysis andDesign. [S.l.]: Wiley, 2005. 34
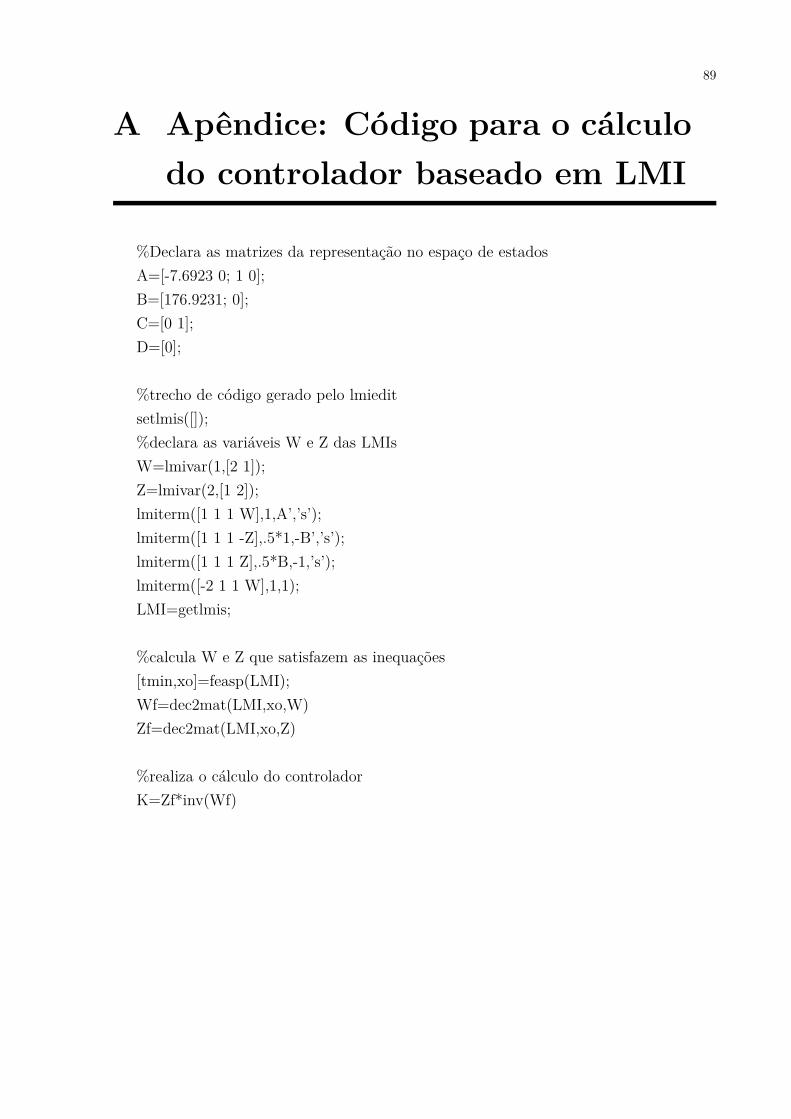
89
A Apêndice: Código para o cálculodo controlador baseado em LMI
%Declara as matrizes da representação no espaço de estadosA=[-7.6923 0; 1 0];B=[176.9231; 0];C=[0 1];D=[0];
%trecho de código gerado pelo lmieditsetlmis([]);%declara as variáveis W e Z das LMIsW=lmivar(1,[2 1]);Z=lmivar(2,[1 2]);lmiterm([1 1 1 W],1,A’,’s’);lmiterm([1 1 1 -Z],.5*1,-B’,’s’);lmiterm([1 1 1 Z],.5*B,-1,’s’);lmiterm([-2 1 1 W],1,1);LMI=getlmis;
%calcula W e Z que satisfazem as inequações[tmin,xo]=feasp(LMI);Wf=dec2mat(LMI,xo,W)Zf=dec2mat(LMI,xo,Z)
%realiza o cálculo do controladorK=Zf*inv(Wf)

90
B Apêndice: Código para o cálculodo controlador baseado em LMIconsiderando-se a taxa de decai-mento
%Declara as matrizes da representação no espaço de estadosA=[-7.6923 0; 1 0];B=[176.9231; 0];C=[0 1];D=[0];
%declara a taxa de decaimentogama=5;
%trecho de código gerado pelo lmieditsetlmis([]);%declara as variáveis W e Z das LMIsW=lmivar(1,[2,1]);Z=lmivar(2,[1,2]);lmiterm([1 1 1 W],1,A’,’s’);lmiterm([1 1 1 -Z],.5*1,-B’,’s’);lmiterm([1 1 1 Z],.5*B,-1,’s’);lmiterm([-1 1 1 W],.5*2*gama,-1,’s’);lmiterm([-2 1 1 W],1,1);LMI2=getlmis;
%calcula W e Z que satisfazem as inequações[tmin,xo]=feasp(LMI2);Wf=dec2mat(LMI2,xo,W)Zf=dec2mat(LMI2,xo,Z)
%realiza o cálculo do controladorK=Zf*inv(Wf)