controle de sistemas dinâmicos · pdf fileat e i at. equacionar controladores associados...
TRANSCRIPT

CONTROLE DE SISTEMAS DINÂMICOS MULTIVARIÁVEIS
UTILIZANDO ANÁLISE DE AUTO-ESTRUTURA
Aline Fernanda Bianco
Centro Federal de Educação Tecnológica de Minas Gerais
38180-510, Campus Araxá, MG E-mail: [email protected]
RESUMO
Sistemas Dinâmicos com Múltiplas Entradas e Múltiplas Saídas (do inglês MIMO Multiple-
Input Multiple-Output) são encontrados em diversas áreas da Matemática Aplicada, tais como, Engenharia de Controle e Robótica. Técnicas de projeto de controladores para essa classe de
sistemas requerem importantes avaliações estruturais matriciais, visando obtenção de
desempenhos satisfatórios. Projetos de controladores multivariáveis podem ser feitos através de Equações de Lyapunov
e Análise de Auto-Estrutura, em que, além da atribuição dos autovalores ao sistema
realimentado, há também a atribuição dos autovetores, associados aos autovalores. Os resultados desse projeto de controladores relacionam-se a determinação de um ganho de
realimentação que estabiliza o sistema em malha fechada. Tais resultados são simulados no
software Matlab®, a fim de mostrar o desempenho dos controladores obtidos, por meio das
análises das propriedades de estabilidade e convergência. O problema é caracterizado da seguinte maneira. Considere o sistema dinâmico contínuo no tempo:
)()()(
)()()(
tDutCxty
tButAxtx
(1)
sendo: nx vetor de estados,
mu vetor de entradas, py vetor de saídas,
nnA matriz que representa a dinâmica do sistema, mnB matriz de ponderação do
controle, npC matriz de saída e
mpD matriz de transição direta do sistema. Note que
no caso monovariável (do inglês SISO Single-Input Single-Output), haveria a mudança no
dimensionamento dos vetores de entrada e saída, com 1u e
1y .
Aplicando-se Transformada de Laplace na equação (1) obtém-se
t
tAAt dBuexetx0
)0()( (2)
e
tDudBueCxCety
t
tAAt
0
)0()( , (3)
soluções no domínio do tempo, dadas em [2].
Observe que a exponencial matricial Ate aparece nas equações (2) e (3). A partir da
decomposição deste termo por meio dos autovalores da matriz A ( },,,{)( 21 nA ) e
dos autovetores ( },,,{ 21 nvvvV ), é possível realizar uma atribuição de auto-estrutura à
solução, como pode ser visto em [3]. Para isso, utiliza-se a definição do polinômio característico
AI e expansão em séries de Taylor de !3!2
3322 tAtAAtIe At
.
Equacionar controladores associados a sistemas multivariáveis contínuos no tempo, resume-
se a obtenção de um ganho K de realimentação, tal que o polinômio característico do sistema
72
ISSN 1984-8218
realimentado tenha as raízes desejadas com parte real negativa. Dessa forma, a estabilidade do
sistema é alcançada.
As equações do sistema realimentado podem ser obtidas substituindo a lei de controle
vKxu no sistema em malha aberta:
BvxBKAx )( (4)
A matriz BKA gera o polinômio característico do sistema em malha fechada, isto é,
BKAI .
A existência do ganho K só é garantida se o par (A,B) for controlável, ou seja, se para
qualquer estado inicial )0(x e para qualquer estado final 1x , existir uma entrada )(tu que
transfere o estado de )0(x para 1x em tempo finito.
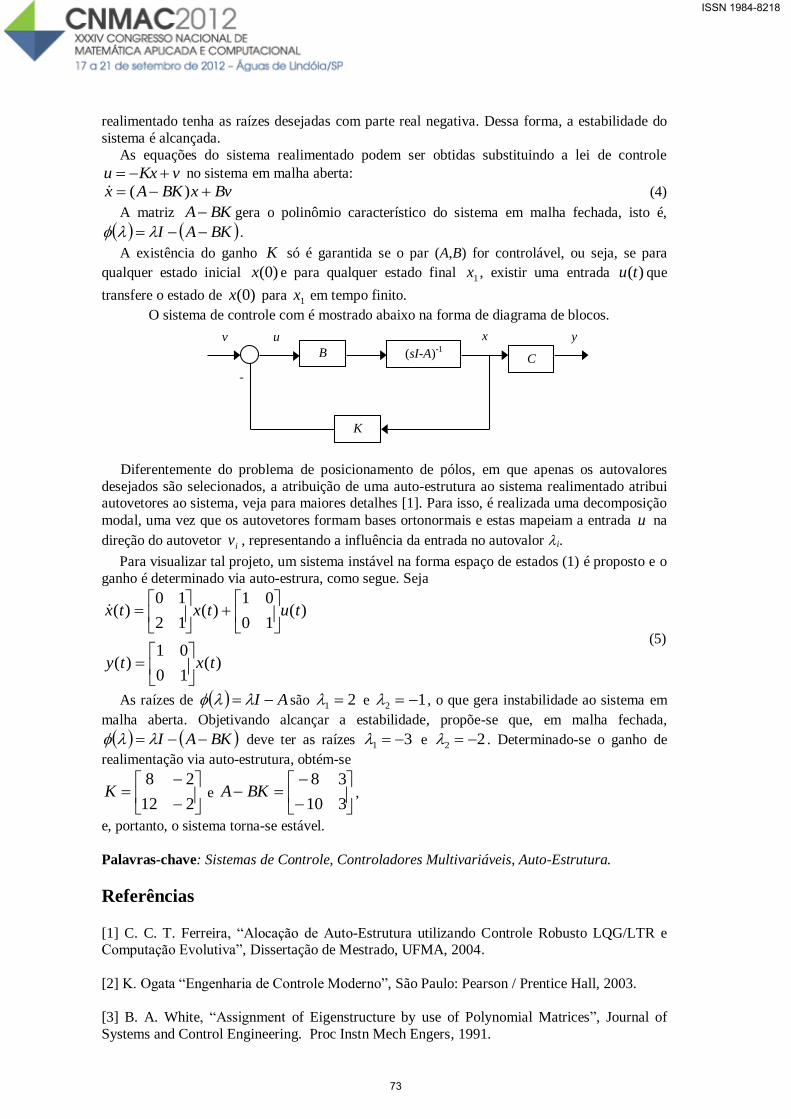
O sistema de controle com é mostrado abaixo na forma de diagrama de blocos.
-
v u
B (sI-A)-1
C
K
yx
Diferentemente do problema de posicionamento de pólos, em que apenas os autovalores
desejados são selecionados, a atribuição de uma auto-estrutura ao sistema realimentado atribui autovetores ao sistema, veja para maiores detalhes [1]. Para isso, é realizada uma decomposição
modal, uma vez que os autovetores formam bases ortonormais e estas mapeiam a entrada u na
direção do autovetor iv , representando a influência da entrada no autovalor i.
Para visualizar tal projeto, um sistema instável na forma espaço de estados (1) é proposto e o
ganho é determinado via auto-estrura, como segue. Seja
)(10
01)(
)(10
01)(
12
10)(
txty
tutxtx
(5)
As raízes de AI são 21 e 12 , o que gera instabilidade ao sistema em
malha aberta. Objetivando alcançar a estabilidade, propõe-se que, em malha fechada,
BKAI deve ter as raízes 31 e 22 . Determinado-se o ganho de
realimentação via auto-estrutura, obtém-se
212
28K e
310
38BKA ,
e, portanto, o sistema torna-se estável.
Palavras-chave: Sistemas de Controle, Controladores Multivariáveis, Auto-Estrutura.
Referências [1] C. C. T. Ferreira, “Alocação de Auto-Estrutura utilizando Controle Robusto LQG/LTR e Computação Evolutiva”, Dissertação de Mestrado, UFMA, 2004.
[2] K. Ogata “Engenharia de Controle Moderno”, São Paulo: Pearson / Prentice Hall, 2003.
[3] B. A. White, “Assignment of Eigenstructure by use of Polynomial Matrices”, Journal of
Systems and Control Engineering. Proc Instn Mech Engers, 1991.
73
ISSN 1984-8218