control automático
DESCRIPTION
ResumeTRANSCRIPT
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 1
1. SISTEMAS DE CONTROL AUTOMÁTICO
1.1 EVOLUCIÓN DE LAS TENDENCIAS DEL CONTROL
AUTOMÁTICO, MODERNO E INTELIGENTE
Siglo XVIII: Máquina de vapor y controlador (James Watt -1769).
Siglo XIX: Modelo matemático del controlador de la máquina de vapor (J. C. Maxwell -
1868).
Siglo XX: Análisis de amplificadores realimentados (H. W. Bode - 1927).
Método de análisis de estabilidad de sistemas (H. Nyquist - 1932).
Diseño de servomecanismos con relé en el control de posición (Hazen -
1934).
Métodos: Lugar Geométrico de las Raíces LGR – Función de Transferencia
(Transformada de Laplace) y Respuesta de Frecuencia RF (Transformada de
Fourier) – década de los 40 y 50. Aquí se establece la Ingeniería del Control
Clásico (Control Automático).
Aparición de computadoras digitales: Respuesta en el Tiempo RT
(Ecuaciones Diferenciales), Variables de Estado – década de los 60. Aquí se
establece la Teoría del Control Moderno.
Control Multivariable (MIMO), Control Óptimo (sistemas determinísticos y
estocásticos), Control Discreto, Control No Lineal e Identificación de
Sistemas (Mediciones, Algoritmos) – década de los 70.
Control Adaptativo (SCADA Supervisory Control And Data Adquisition –
Sistema de Control Supervisor y Distribuido), Control Robusto, Control
Predictivo – década de los 80.
Control Inteligente (Redes Neuronales, Lógica Difusa, Algoritmos
genéticos), Control Deslizante – década de los 90.
Alcances: Instrumentación, Instrumentación Industrial, Electrónica de Potencia,
Control de Procesos, Control de Máquinas, etc.
Aplicaciones: Ingeniería Mecánica, Eléctrica, Química, Matemática, Computacional.
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 2
1. 2. ENFOQUE SISTÉMICO
Sistema:
Conjunto de componentes
Interactúan entre sí con el entorno
Cumplen un objetivo, tarea o fin específico
Proceso (involucra varios sistemas):
Serie de cambios graduales y continuos
Debido a una secuencia de acciones de control (preprogramadas)
Con el objetivo de obtener un producto o familia de productos terminales
Planta:
Sistema (servomecanismo) o Proceso
Perturbación:
Señal indeseable (inevitable, naturaleza aleatoria)
Efecto adverso al comportamiento dinámico del Sistema
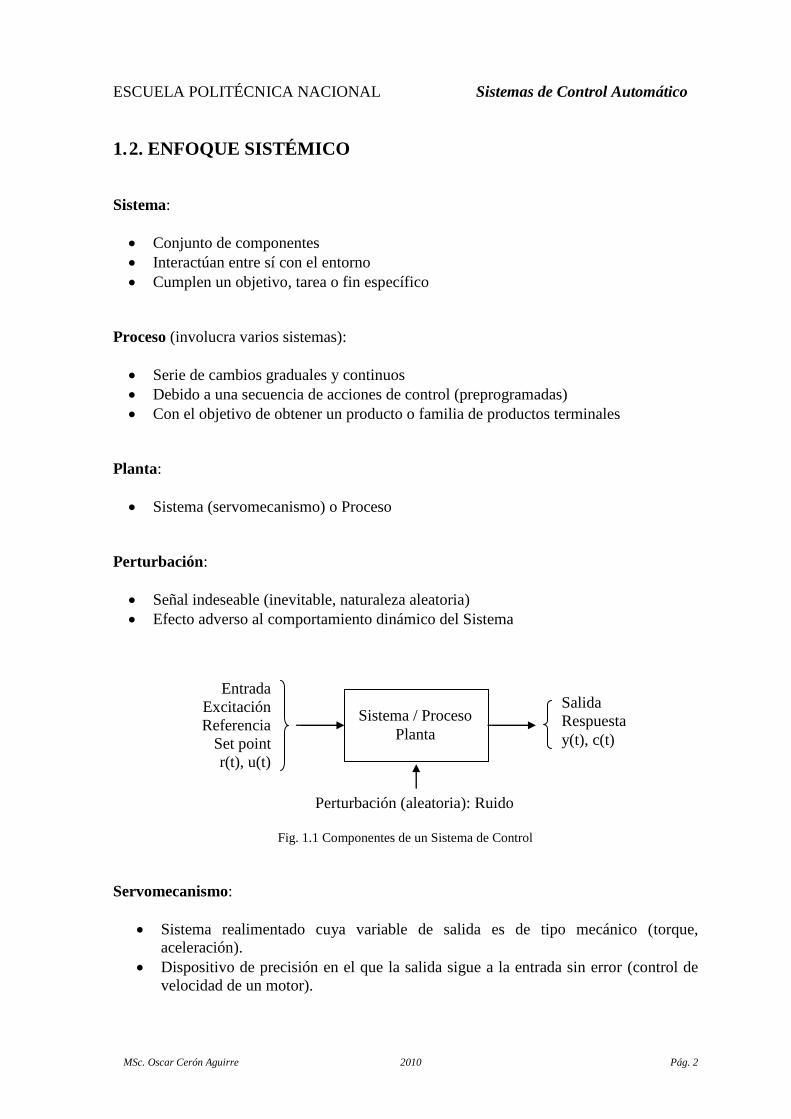
Fig. 1.1 Componentes de un Sistema de Control
Servomecanismo:
Sistema realimentado cuya variable de salida es de tipo mecánico (torque,
aceleración).
Dispositivo de precisión en el que la salida sigue a la entrada sin error (control de
velocidad de un motor).
Entrada
Excitación
Referencia
Set point
r(t), u(t)
Salida
Respuesta
y(t), c(t)
Sistema / Proceso
Planta
Perturbación (aleatoria): Ruido
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 3
Sistema Entrada Salida
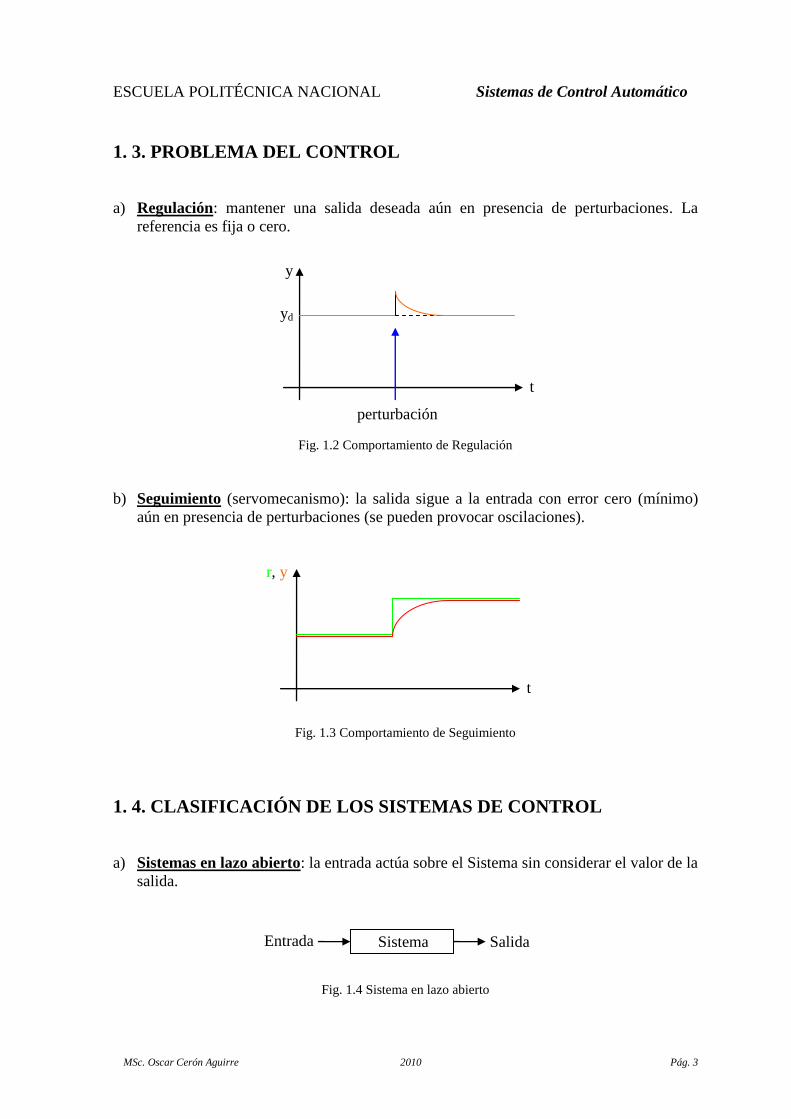
1. 3. PROBLEMA DEL CONTROL
a) Regulación: mantener una salida deseada aún en presencia de perturbaciones. La
referencia es fija o cero.
Fig. 1.2 Comportamiento de Regulación
b) Seguimiento (servomecanismo): la salida sigue a la entrada con error cero (mínimo)
aún en presencia de perturbaciones (se pueden provocar oscilaciones).
Fig. 1.3 Comportamiento de Seguimiento
1. 4. CLASIFICACIÓN DE LOS SISTEMAS DE CONTROL
a) Sistemas en lazo abierto: la entrada actúa sobre el Sistema sin considerar el valor de la
salida.
Fig. 1.4 Sistema en lazo abierto
perturbación
y
t
yd
r, y
t
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 4
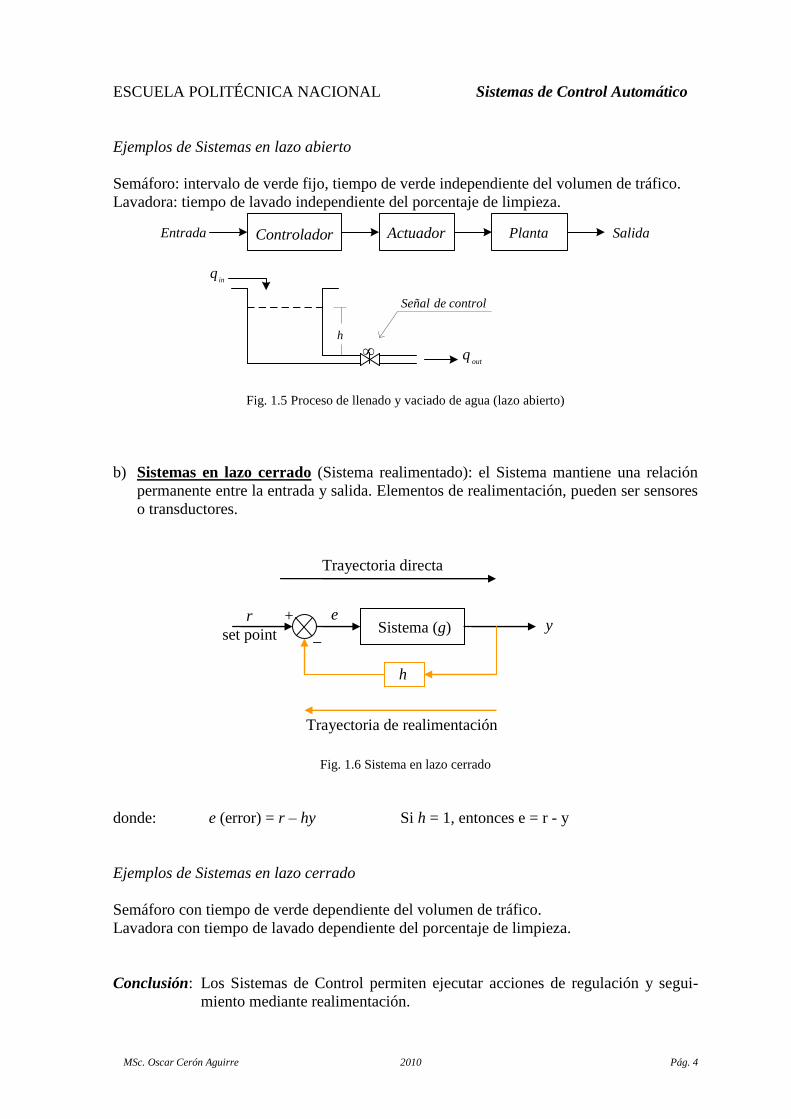
Ejemplos de Sistemas en lazo abierto
Semáforo: intervalo de verde fijo, tiempo de verde independiente del volumen de tráfico.
Lavadora: tiempo de lavado independiente del porcentaje de limpieza.
inq
outq
h
rControlado Actuador PlantaEntrada Salida
controldeSeñal
Fig. 1.5 Proceso de llenado y vaciado de agua (lazo abierto)
b) Sistemas en lazo cerrado (Sistema realimentado): el Sistema mantiene una relación
permanente entre la entrada y salida. Elementos de realimentación, pueden ser sensores
o transductores.
Fig. 1.6 Sistema en lazo cerrado
donde: e (error) = r – hy Si h = 1, entonces e = r - y
Ejemplos de Sistemas en lazo cerrado
Semáforo con tiempo de verde dependiente del volumen de tráfico.
Lavadora con tiempo de lavado dependiente del porcentaje de limpieza.
Conclusión: Los Sistemas de Control permiten ejecutar acciones de regulación y segui-
miento mediante realimentación.
Sistema (g) y r +
set point
e
h
_
-
Trayectoria de realimentación
Trayectoria directa
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 5
1.5. CARACTERÍSTICAS DE LOS SISTEMAS
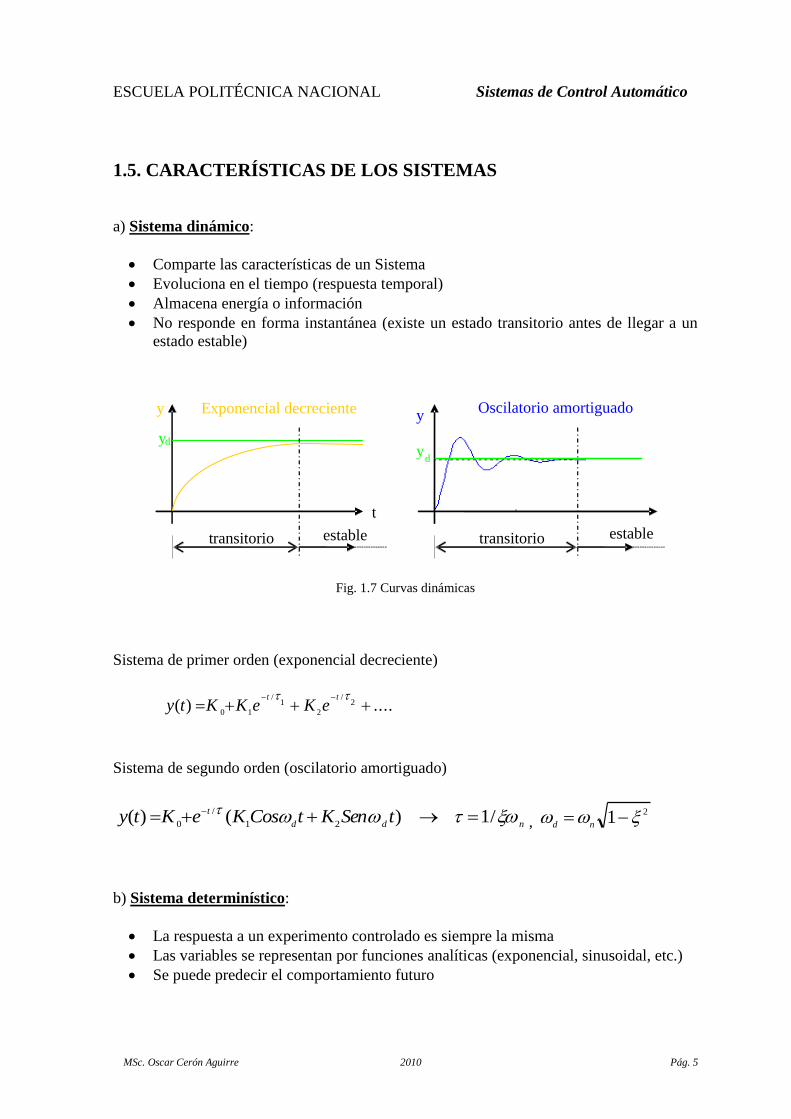
a) Sistema dinámico:
Comparte las características de un Sistema
Evoluciona en el tiempo (respuesta temporal)
Almacena energía o información
No responde en forma instantánea (existe un estado transitorio antes de llegar a un
estado estable)
yd
t
yd
y y
transitorio transitorio estable estable
Exponencial decreciente Oscilatorio amortiguado
Fig. 1.7 Curvas dinámicas
Sistema de primer orden (exponencial decreciente)
....)( 2/
2
1/
10
tt
eKeKKty
Sistema de segundo orden (oscilatorio amortiguado)
ndd
t tSenKtCosKeKty /1)()(21
/
0
, 21
nd
b) Sistema determinístico:
La respuesta a un experimento controlado es siempre la misma
Las variables se representan por funciones analíticas (exponencial, sinusoidal, etc.)
Se puede predecir el comportamiento futuro
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 6
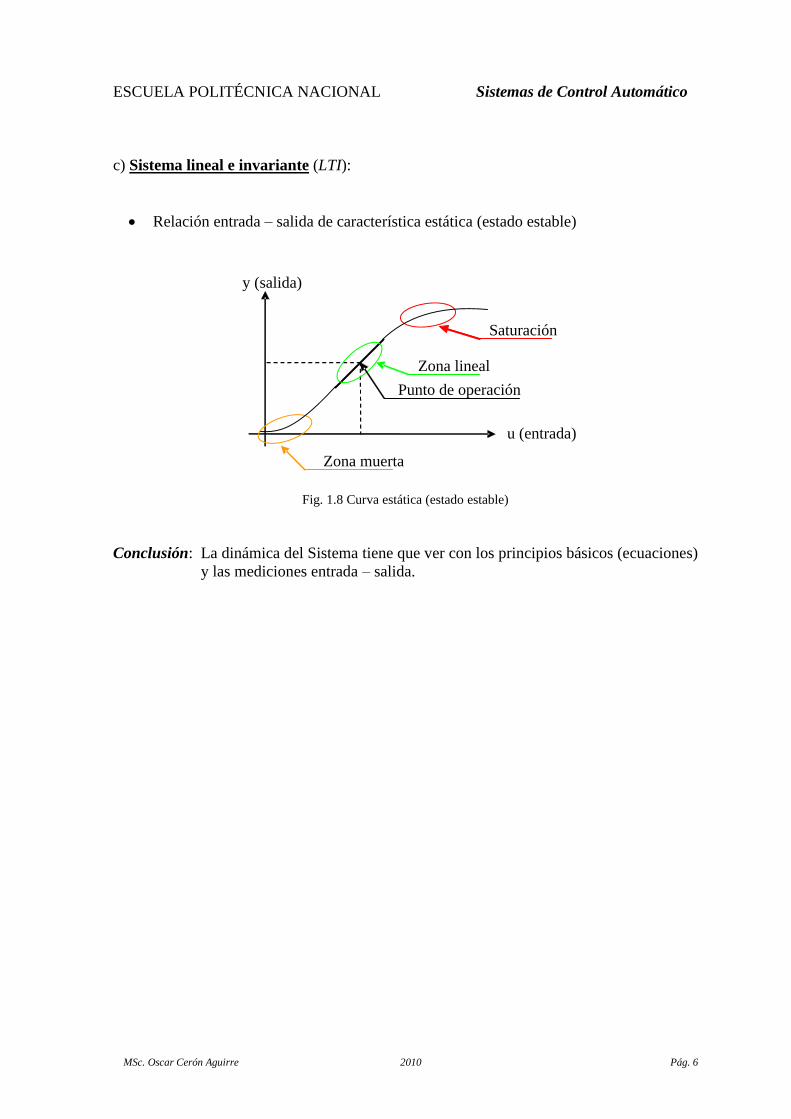
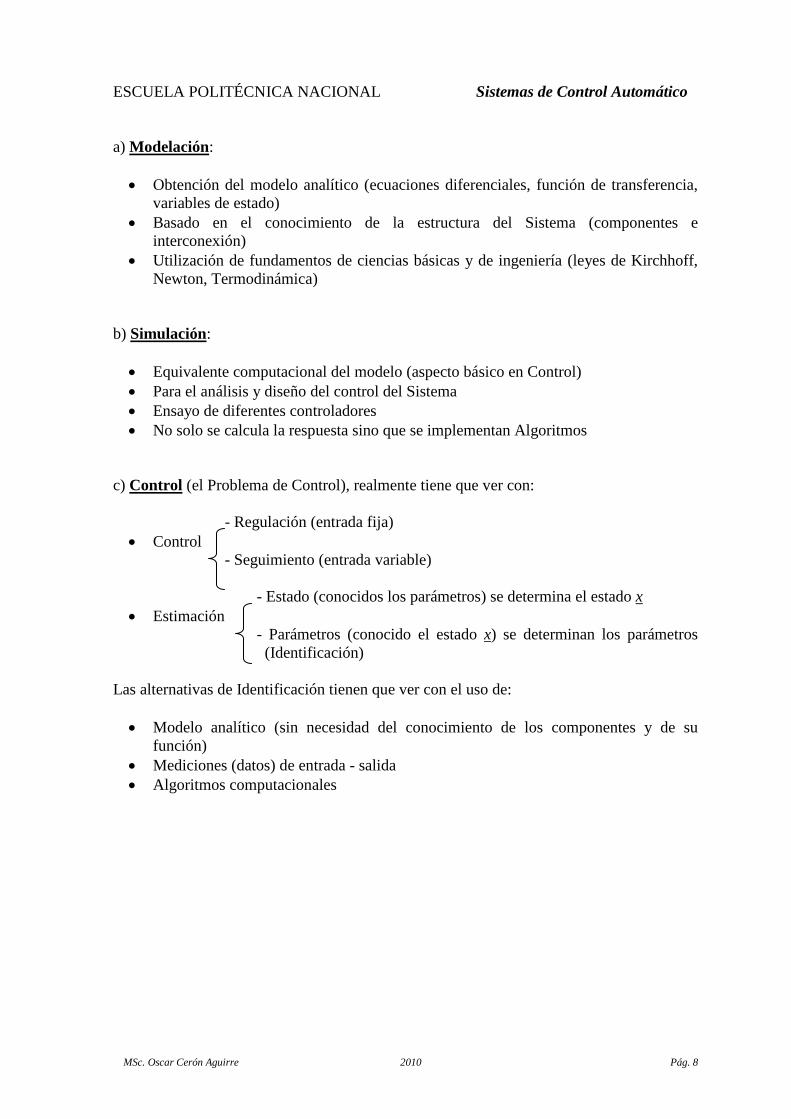
c) Sistema lineal e invariante (LTI):
Relación entrada – salida de característica estática (estado estable)
u (entrada)
y (salida)
Zona muerta
Zona lineal
Saturación
Punto de operación
Fig. 1.8 Curva estática (estado estable)
Conclusión: La dinámica del Sistema tiene que ver con los principios básicos (ecuaciones)
y las mediciones entrada – salida.
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 7
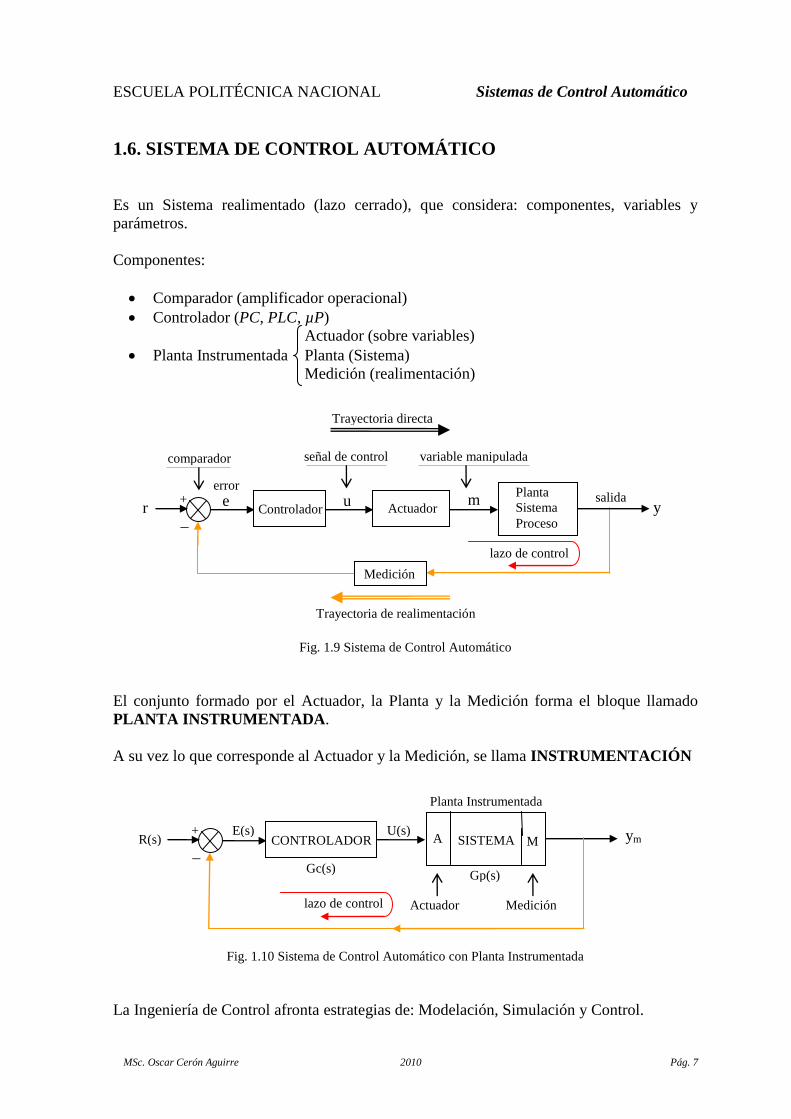
1.6. SISTEMA DE CONTROL AUTOMÁTICO
Es un Sistema realimentado (lazo cerrado), que considera: componentes, variables y
parámetros.
Componentes:
Comparador (amplificador operacional)
Controlador (PC, PLC, µP)
Actuador (sobre variables)
Planta Instrumentada Planta (Sistema)
Medición (realimentación)
Fig. 1.9 Sistema de Control Automático
El conjunto formado por el Actuador, la Planta y la Medición forma el bloque llamado
PLANTA INSTRUMENTADA.
A su vez lo que corresponde al Actuador y la Medición, se llama INSTRUMENTACIÓN
Fig. 1.10 Sistema de Control Automático con Planta Instrumentada
La Ingeniería de Control afronta estrategias de: Modelación, Simulación y Control.
ym R(s) E(s)
_
-
CONTROLADOR
Actuador
U(s) +
lazo de control
SISTEMA
Medición
A M
Gp(s) Gc(s)
Planta Instrumentada
Planta
Sistema
Proceso
y r e
_
-
Trayectoria de realimentación
Trayectoria directa
Controlador Actuador
Medición
comparador
error
u
señal de control
m
variable manipulada
salida +
lazo de control
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 8
a) Modelación:
Obtención del modelo analítico (ecuaciones diferenciales, función de transferencia,
variables de estado)
Basado en el conocimiento de la estructura del Sistema (componentes e
interconexión)
Utilización de fundamentos de ciencias básicas y de ingeniería (leyes de Kirchhoff,
Newton, Termodinámica)
b) Simulación:
Equivalente computacional del modelo (aspecto básico en Control)
Para el análisis y diseño del control del Sistema
Ensayo de diferentes controladores
No solo se calcula la respuesta sino que se implementan Algoritmos
c) Control (el Problema de Control), realmente tiene que ver con:
- Regulación (entrada fija)
Control
- Seguimiento (entrada variable)
- Estado (conocidos los parámetros) se determina el estado x
Estimación
- Parámetros (conocido el estado x) se determinan los parámetros
(Identificación)
Las alternativas de Identificación tienen que ver con el uso de:
Modelo analítico (sin necesidad del conocimiento de los componentes y de su
función)
Mediciones (datos) de entrada - salida
Algoritmos computacionales
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 9
2. MODELACIÓN DINÁMICA DE SISTEMAS
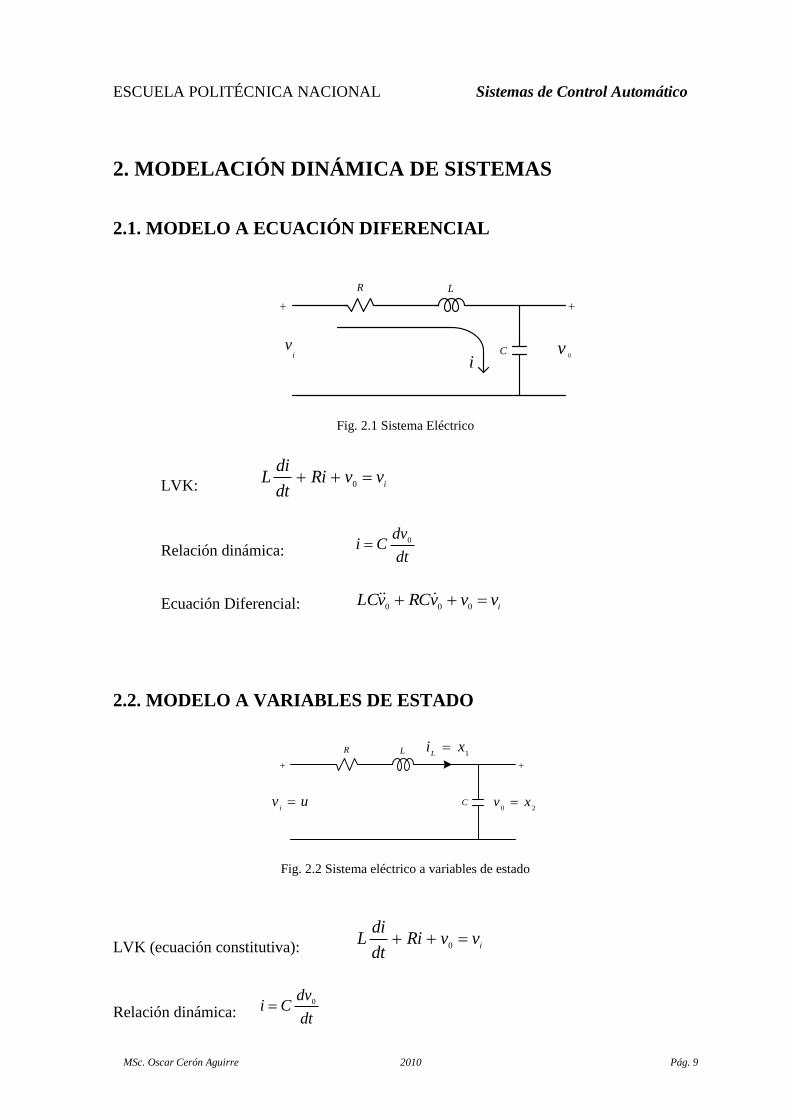
2.1. MODELO A ECUACIÓN DIFERENCIAL
R
iv
0v
L
C
i
Fig. 2.1 Sistema Eléctrico
LVK: ivvRi
dt
diL
0
Relación dinámica: dt
dvCi 0
Ecuación Diferencial: ivvvRCvLC
000
2.2. MODELO A VARIABLES DE ESTADO
R 1xi
L
uvi
20xv
L
C
Fig. 2.2 Sistema eléctrico a variables de estado
LVK (ecuación constitutiva): ivvRi
dt
diL
0
Relación dinámica: dt
dvCi 0

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 10
donde:
uL
xL
xL
RxuxRxxL
11211211
1221
1x
CxxCx
0
1
01
1
2
1
2
1
Lx
x
C
LL
R
x
x
2
110
x
xy
2.3. MODELO DE REDES
a) Sistema Eléctrico
- Modelo a Función de Transferencia y Ecuación Diferencial
R R
C Civ
0v
av
Fig. 2.3 Sistema eléctrico RC doble
R/1 SC
R/1
SC
aV
0V
RV i /
Fig. 2.4 Modelo de red
Donde, aplicando el método de nodos, se tiene:

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 11
011
12
0
R
V
V
V
sCRR
RsC
Ria
entonces, la Función de Transferencia viene dada por: 13
1222
0
SCRRCSV
V
i
Considerando los siguientes datos, se tiene:
13
1][1000],[1
2
0
ssV
VuFCKR
i
iivvvvVVss
0000
2 3)13(
- Modelo a Variables de Estado
R R
C Cuvi
20xv
1xv
a
1i
2i
3i
4i
1 2
Fig. 2.5 Modelo a variables de estado
Nodo V0: 2042xCvCii
Malla 2: 21222221
11x
RCx
RCxxxRCxRixv
a
Nodo Va: 210231xCxCvCvCiii
a
Malla 1: 12111211)()( xxxxCRuxRxCxCvRiuv
ai
uRC
xRC
xRC
xxxxxCRu112
)(2111211
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 12
uRC
x
x
RCRC
RCRC
x
x
0
1
11
12
2
1
2
1
2
1
010
x
xyv
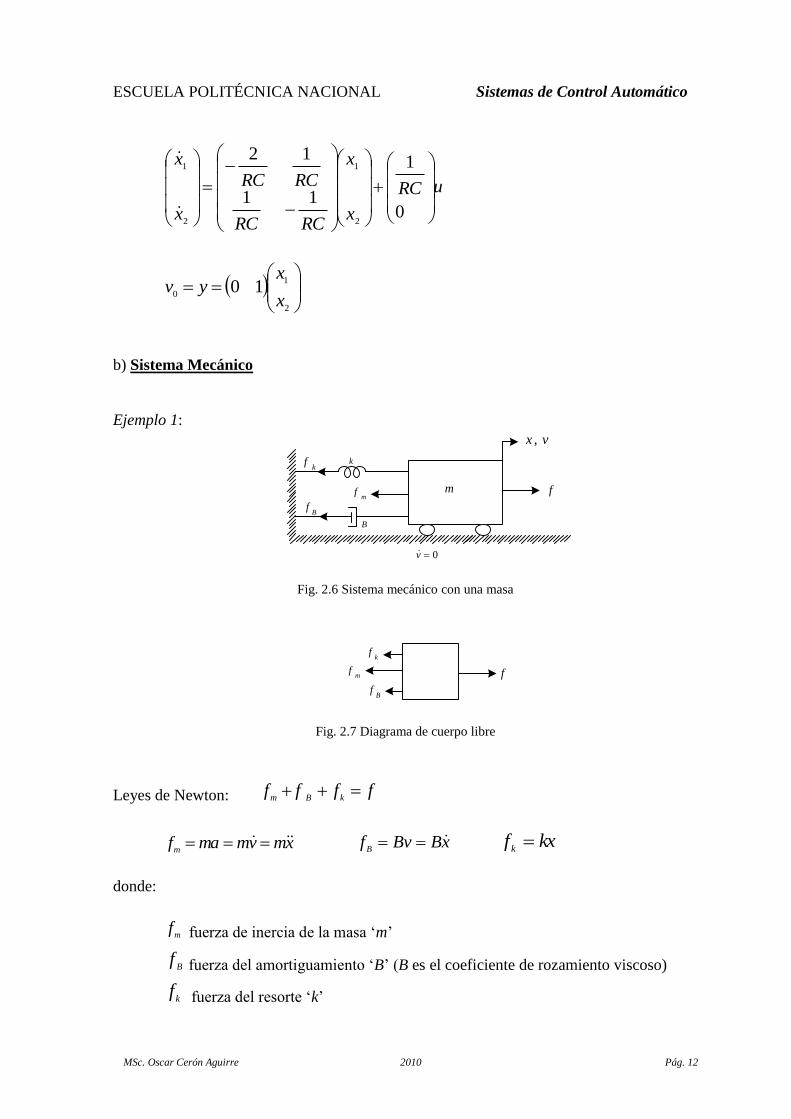
b) Sistema Mecánico
Ejemplo 1:
B
k
Bf
kf
mf f
vx ,
m
0v
Fig. 2.6 Sistema mecánico con una masa
kf
mf
Bf
f
Fig. 2.7 Diagrama de cuerpo libre
Leyes de Newton: ffffkBm
xmvmmafm
xBBvfB
kxfk
donde:
mf fuerza de inercia de la masa ‘m’
Bf fuerza del amortiguamiento ‘B’ (B es el coeficiente de rozamiento viscoso)
kf fuerza del resorte ‘k’
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 13
además: naceleracióa
velocidadv
salidaposiciónx
entradafuerzaf
- Ecuación Diferencial: fkxxBxm
- Función de Transferencia: kBsmssF
sXsG
2
1
)(
)()(
- Variables de Estado: 1xyx
2112xxxxxv
m
ux
m
Bx
m
kxufkxBxxm
212122
u
mx
x
m
B
m
k
x
x
1
010
2
1
2
1
2
101
x
xy
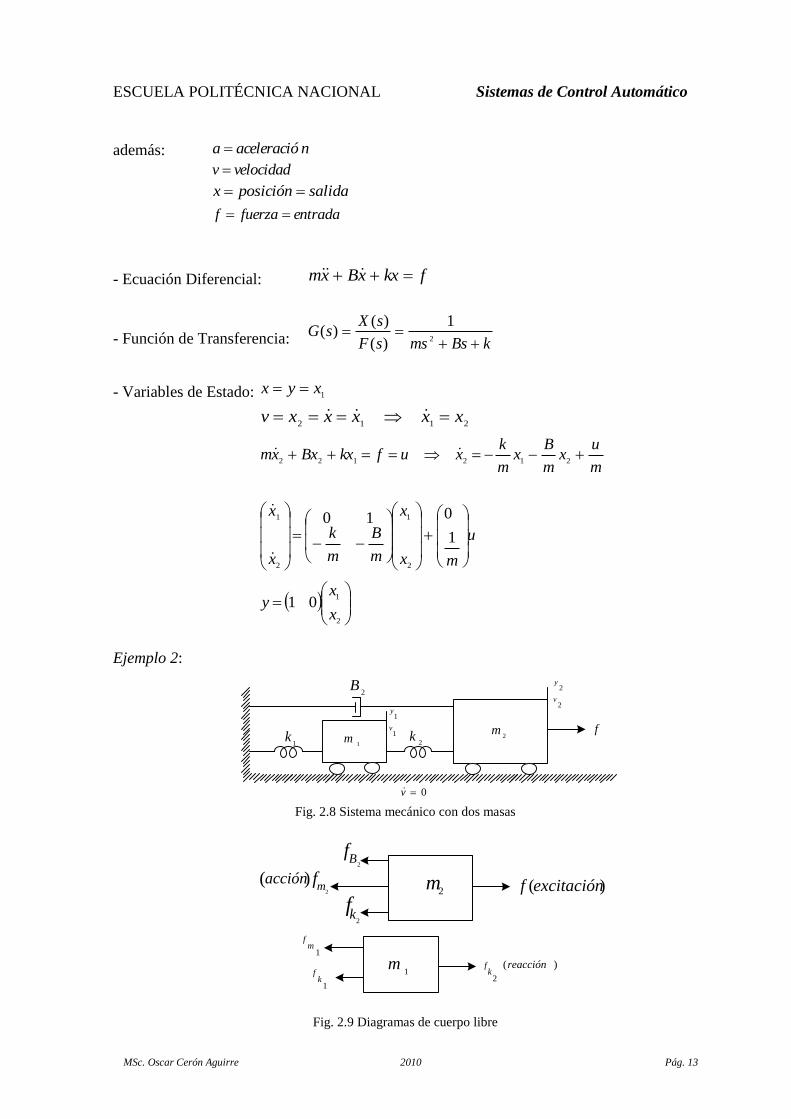
Ejemplo 2:
2B
1k
f2
m
0v
1m 2
k1
1
v
y2
2
v
y
Fig. 2.8 Sistema mecánico con dos masas
2kf
2
)(mfacción
2B
f
)(excitaciónf2m
)(
2
reacciónk
f1
m1
kf
1m
f
Fig. 2.9 Diagramas de cuerpo libre

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 14
Ecuaciones de la dinámica:
fyykyBymffffkBm
)(1222222
222
)(1221111
211
yykykymfffkkm
Datos: ]//[12
smNB ]/[221 mNkk
][11
Kgm ][32
Kgm
- Modelos a Ecuaciones Diferenciales:
)(22
)(23
1211
1222
yyyy
fyyyy
- Modelos a variables de Estado:
2
2
1
1
4
3
2
1
v
y
v
y
x
x
x
x
ecuaciones: fxxxxfyyyy 13331222
223223
024024311211 xxxyyy
además: 12111xxvyv
34222xxvyv
por lo que: fxxxxfxxxx 13441333
223223
024024312311 xxxxxx
entonces:
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 15
f
x
x
x
x
x
x
x
x
3
1
4
3
2
1
3
1
3
2
3
2
4
3
2
1
0
0
0
0
1000
0204
0010
4
3
2
1
2
1
01
00
00
01
x
x
x
x
y
y
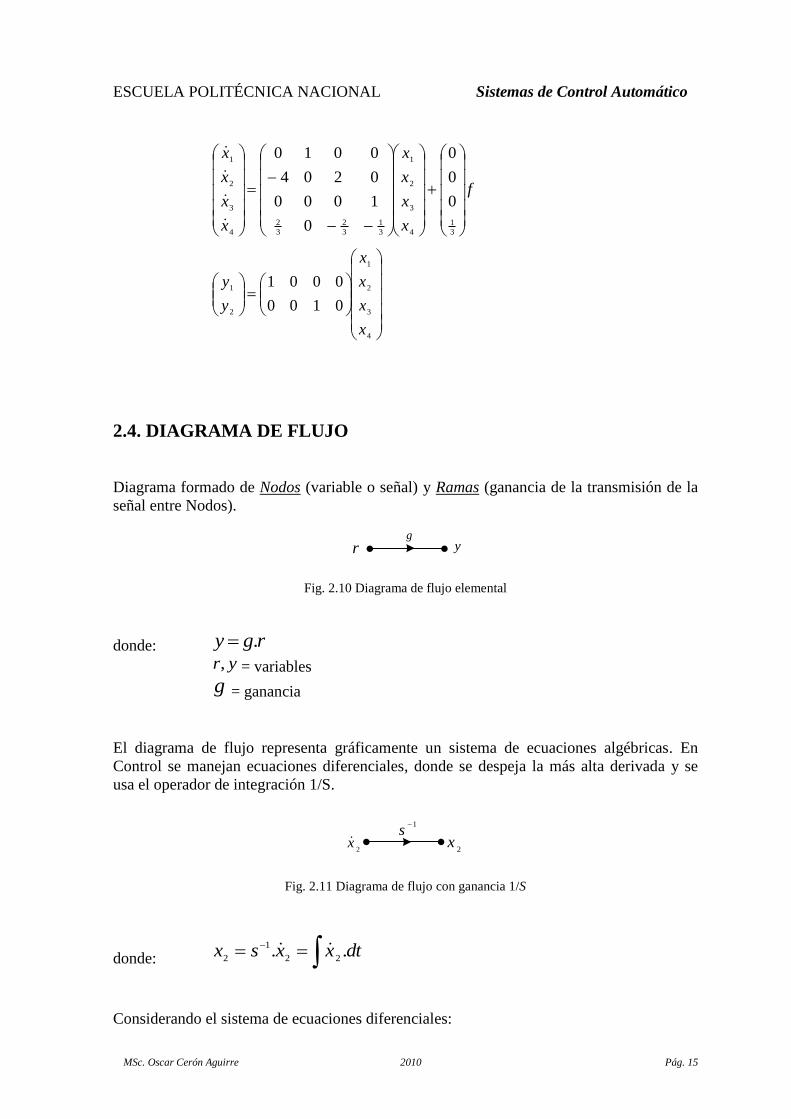
2.4. DIAGRAMA DE FLUJO
Diagrama formado de Nodos (variable o señal) y Ramas (ganancia de la transmisión de la
señal entre Nodos).
g
r y
Fig. 2.10 Diagrama de flujo elemental
donde: rgy .
yr, = variables
g = ganancia
El diagrama de flujo representa gráficamente un sistema de ecuaciones algébricas. En
Control se manejan ecuaciones diferenciales, donde se despeja la más alta derivada y se
usa el operador de integración 1/S.
2x
2x
1s
Fig. 2.11 Diagrama de flujo con ganancia 1/S
donde: dtxxsx ..22
1
2
Considerando el sistema de ecuaciones diferenciales:

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 16
fyyyyfyyyy3
1
13
2
23
2
23
1
21222223
21121124024 yyyyyy
El diagrama de flujo correspondiente a las ecuaciones diferenciales, viene dado por:
2y
2y
2y
1y
1y
1y
f
3
2
3
2
3
1
3
1
4
2s/1 s/1 s/1 s/1
entrada
2salida 1salida
Fig. 2.12 Diagrama de flujo con dos salidas
- Modelos a Función de Transferencia usando la Regla de Mason:
Regla de Mason:
ii
PsU
sYsG
1
)(
)()(
donde: kjijii
LLLLLL1
además:
iL = sumatoria de ganancias de lazos individuales
jiLL = sumatoria de producto de ganancias de 2 lazos individuales que no se
topan
kjiLLL = sumatoria de producto de ganancias de 3 lazos individuales que no
se topan
iP = ganancia de la i-ava trayectoria directa entre entrada y salida
1i suma de ganancias de lazos individuales que no topan a la i-ava
trayectoria + suma del producto de ganancias de dos lazos individuales que
no se topan entre sí ni tampoco topan a la i-ava trayectoria - …….

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 17
Ejemplo: Aplicar la fórmula de Mason para obtener las funciones de transferencia de cada
salida respecto a la entrada.
2y
2y
2y
1y
1y
1y
f
3
2
3
2
3
1
3
1
4
2s/1 s/1 s/1 s/1
1salida2salida
entrada
4L
1L
2L
3L
Fig. 2.13 Diagrama de flujo con lazos individuales
Donde las ganancias de cada lazo individual, viene dado por:
1
3
1
1
sL 2
3
2
2
sL 2
34 sL
4
3
4
4
sL
además:
)44143(3
1)()(1 4321
32314321
ssssLLLLLLLL
Salida 1: 4
13
2 sP 11
4
4
4321
3
1
4
3
2
111
1)44143()(
)()(
s
s
ssss
sP
sF
sYsG
34
342
3143
314
1
1
11
1
3
2
)(
)()(
sssssD
sNKsG
Salida 2: 2
23
1 sP
2
32411 sL
4
4
4321
31
4
342
31
222
2)44143()(
)()(
s
s
ssss
ssP
sF
sYsG
34
342
3143
314
2
2
2
22
4
3
1
)(
)()(
ssss
s
sD
sNKsG

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 18
2.5. FORMAS CANÓNICAS
rrryyyy 54235.65.4
rSSrrySyySySdt
dS 223 54235.65.4
a) Observable (cuando observando o midiendo la salida es posible determinar el estado
en un tiempo finito)
Agrupando coeficientes de S, se tiene:
)32()5.64()5.45(23 yryrSyrSyS
Despejando y y reagrupando factores de S-1
, se llega a lo siguiente:
3
2
1
}])32()5.64[()5.45{( 111
x
x
x
yrSyrSyrSy
entonces:
yx 3
rxxxyrx 55.4)5.45(3223
rxxxyrx 45.6)5.64(3112
rxyrx 23)32(31
Por lo tanto, la forma CANÓNICA OBSERVABLE viene dada por:

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 19
r
x
x
x
x
x
x
5
4
2
5.410
5.601
300
3
2
1
3
2
1
3
2
1
100
x
x
x
y
Cuyo diagrama de flujo está dado por:
1s
1s
1s
yr2 1 1 13
x3
x2x1
x1
x 2x
4
5
5.4
5.6
3
Fig. 2.14 Diagrama de flujo con forma canónica observable
b) Controlable (propiedad por la cual se puede transferir de un estado inicial a un estado
final, mediante una señal de control de entrada, en un tiempo finito)
La función de transferencia, viene dada por:
X
X
SSS
SS
R
Y
35.65.4
24523
2
donde: XSSY 245 2
XSSSR 35.65.4 23
considerando: xx 1

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 20
entonces: 2112xxxxx
3223xxxxx
xx 3
por lo tanto: 123335.65.435.65.4 xxxxxxxxr
rxxxx 3213
5.45.63
A su vez: 321542542 xxxxxxy
Finalmente las dos últimas expresiones permiten dibujar el diagrama de flujo, dado por:
1s
1s
1s 21 3
x
1x
4
5
23xx 12
xx
5.6
5.4
3
r y
Fig. 2.15 Diagrama de flujo con forma canónica controlable
Entonces, la forma CANÓNICA CONTROLABLE viene dada por:
r
x
x
x
x
x
x
1
0
0
5.45.63
100
010
3
2
1
3
2
1
3
2
1
542
x
x
x
y

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 21
c) Forma Canónica de Jordan: es una forma de desacoplamiento de estados, para el caso
de que los valores propios o polos de la función de
transferencia sean reales.
Partiendo de la función de transferencia con el denominador factorado, se tiene:
)2)(5.1)(1(
245
35.65.4
245 2
23
2
SSS
SS
SSS
SS
R
Y
Descomponiendo en fracciones parciales, se llega a la siguiente expresión:
rS
rS
rS
ySSSR
Y
)2(
28
)5.1(
29
)1(
6
)2(
28
)5.1(
29
)1(
6
donde:
rxxxrSx
S
rx
111111
rxxxrSxS
rx
222225.15.1
5.1
rxxxrSx
S
rx
3333322
2
además: 32128296 xxxy
Entonces la forma CANÓNICA DE JORDAN viene dada por:
r
x
x
x
x
x
x
1
1
1
200
05.10
001
3
2
1
3
2
1
3
2
1
28296
x
x
x
y

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 22
El diagrama de flujo correspondiente, está representado por el modelo paralelo (estados
desacoplados):
1
1
1
1
r y
1s
1s
1s
1x
2x
3x
1x
2x
3x
6
29
28
1
5.1
2
Fig. 2.16 Diagrama de flujo con forma canónica de Jordan
Ejemplo: Obtener la Función de Transferencia en base al diagrama de flujo
1
1
1
1
r y
1s
1s
1s
1x
2x
3x
1x
2x
3x
6
29
28
1
5.1
2
1L
2L
3L
1
1
SL 2
25.1 SL
2
32 SL
)35.65.41)()(1 321
321323121321
SSSLLLLLLLLLLLL
además: 1
16 SP
21
3232135.31)(1 SSLLLL
1
229 SP
21
31312231)(1 SSLLLL
1
328 SP
21
212135.15.21)(1 SSLLLL

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 23
3
3
321
321
332211
)35.65.41(
245
)(
)()(
S
S
SSS
SSSPPP
sR
sYsG
35.65.4
4.08.05
)(
)()(
23
2
SSS
SS
sD
sNKsG
Esta última expresión es la misma con la que se partió para el dibujo del diagrama de flujo
(forma Canónica de Jordan), esto es:
)2)(5.1)(1(
245
35.65.4
245 2
23
2
SSS
SS
SSS
SS
R
Y
Ejemplo: Obtener la Función de Transferencia en base al diagrama de flujo
2L
1L
3L
u
1s
1s 1s
y
1 1
22
2
1
1
11
1
1
sL 1
2
sL 2
32 sL
321
31213212321)()(1 sssLLLLLLL
1
1
sP 21
32121)(1 ssLL
2
24 sP
1
1211 sL
donde:
3
3
321
321
2211
2321
65
)(
)()(
s
s
sss
sssPP
sU
sYsG
232
651
)(
)()(
23
2
sss
ss
sD
sNKsG
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 24
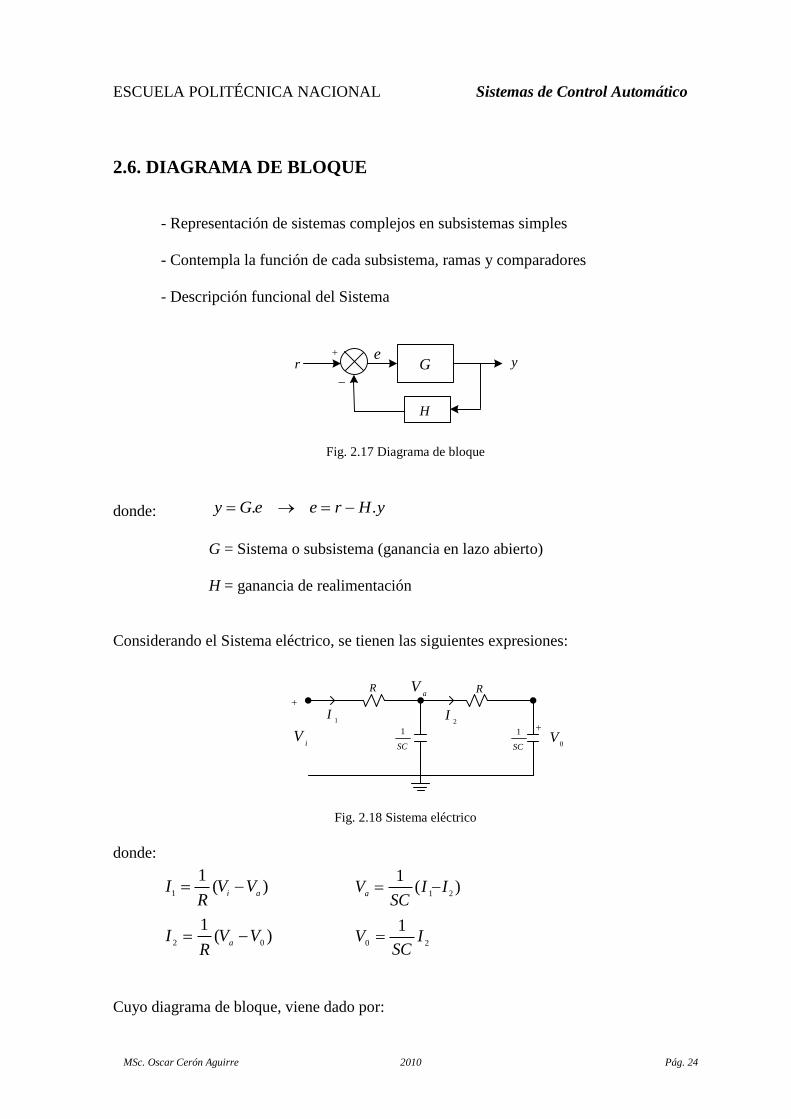
2.6. DIAGRAMA DE BLOQUE
- Representación de sistemas complejos en subsistemas simples
- Contempla la función de cada subsistema, ramas y comparadores
- Descripción funcional del Sistema
r yG
H
e
Fig. 2.17 Diagrama de bloque
donde: yHreeGy ..
G = Sistema o subsistema (ganancia en lazo abierto)
H = ganancia de realimentación
Considerando el Sistema eléctrico, se tienen las siguientes expresiones:
0V
iV
SC
1
R R
SC
1
1I
2I
aV
Fig. 2.18 Sistema eléctrico
donde:
)(
11 ai
VVR
I
)(1
21II
SCV
a
)(
102
VVR
Ia
20
1I
SCV
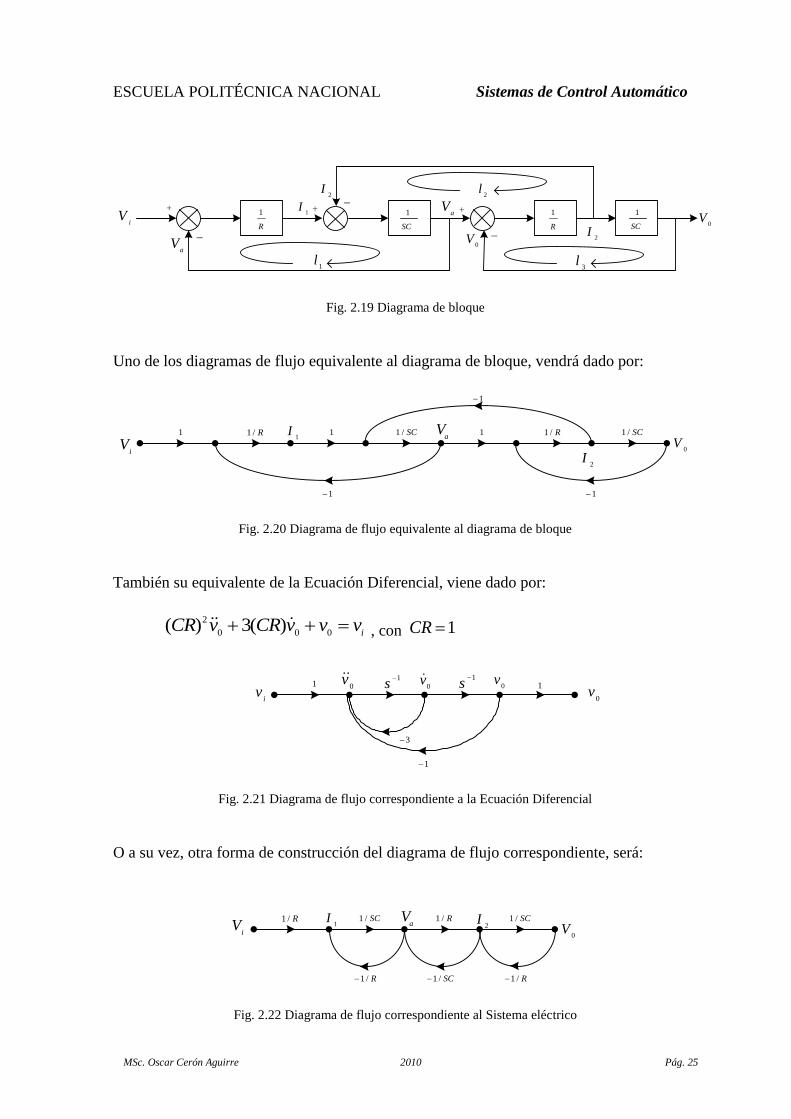
Cuyo diagrama de bloque, viene dado por:
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 25
R
1
SC
1
R
1
SC
1
iV a
V0
V1
I
2I
2I
aV 0
V
1l
2l
3l
Fig. 2.19 Diagrama de bloque
Uno de los diagramas de flujo equivalente al diagrama de bloque, vendrá dado por:
1
1 R/1 SC/1
0V
iV
1I
2I
aV R/1SC/11 1
1
1
Fig. 2.20 Diagrama de flujo equivalente al diagrama de bloque
También su equivalente de la Ecuación Diferencial, viene dado por:
ivvvCRvCR
000
2 )(3)( , con 1CR
iv
1 10v
0v
0v
0v 1
s1
s
1
3
Fig. 2.21 Diagrama de flujo correspondiente a la Ecuación Diferencial
O a su vez, otra forma de construcción del diagrama de flujo correspondiente, será:
R/1
R/1 SC/1
iV 1
I2
IaV R/1SC/1
SC/1
0V
R/1
Fig. 2.22 Diagrama de flujo correspondiente al Sistema eléctrico
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 26
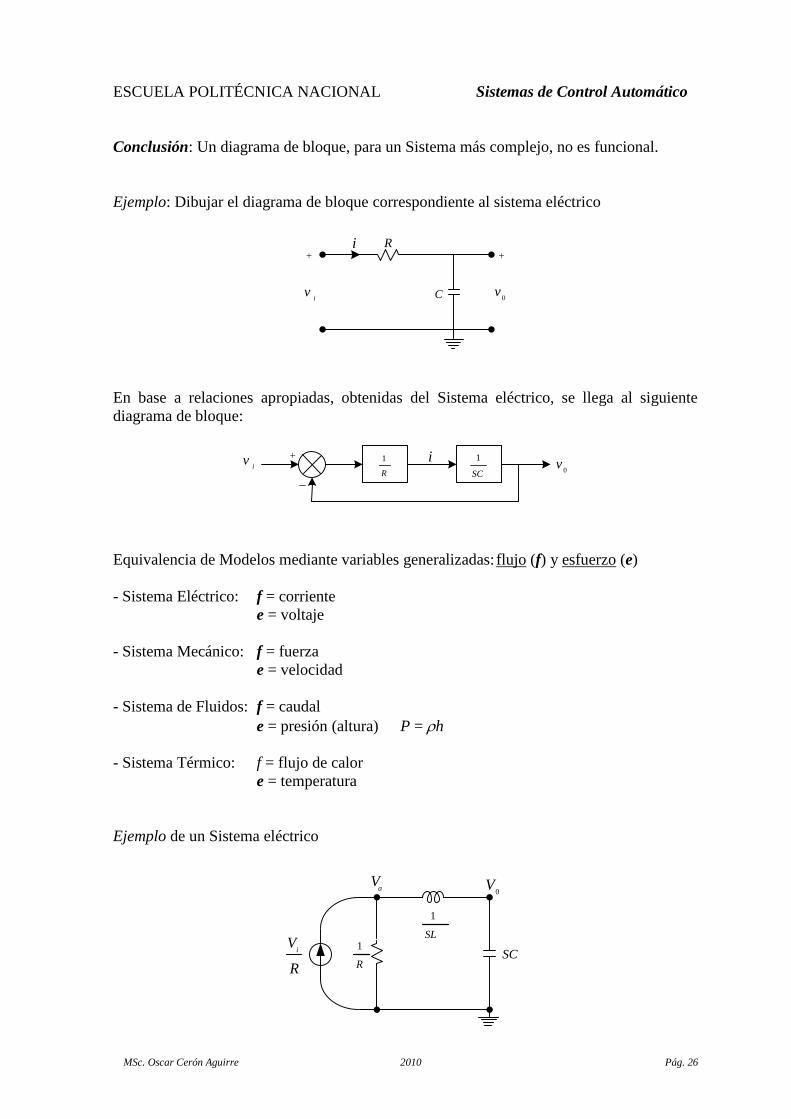
Conclusión: Un diagrama de bloque, para un Sistema más complejo, no es funcional.
Ejemplo: Dibujar el diagrama de bloque correspondiente al sistema eléctrico
R
Civ
0v
i
En base a relaciones apropiadas, obtenidas del Sistema eléctrico, se llega al siguiente
diagrama de bloque:
R
1
SC
1
ii
v0
v
Equivalencia de Modelos mediante variables generalizadas: flujo (f) y esfuerzo (e)
- Sistema Eléctrico: f = corriente
e = voltaje
- Sistema Mecánico: f = fuerza
e = velocidad
- Sistema de Fluidos: f = caudal
e = presión (altura) P = h
- Sistema Térmico: f = flujo de calor
e = temperatura
Ejemplo de un Sistema eléctrico
SC
SL
1
R
1
R
Vi
aV
0V
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 27
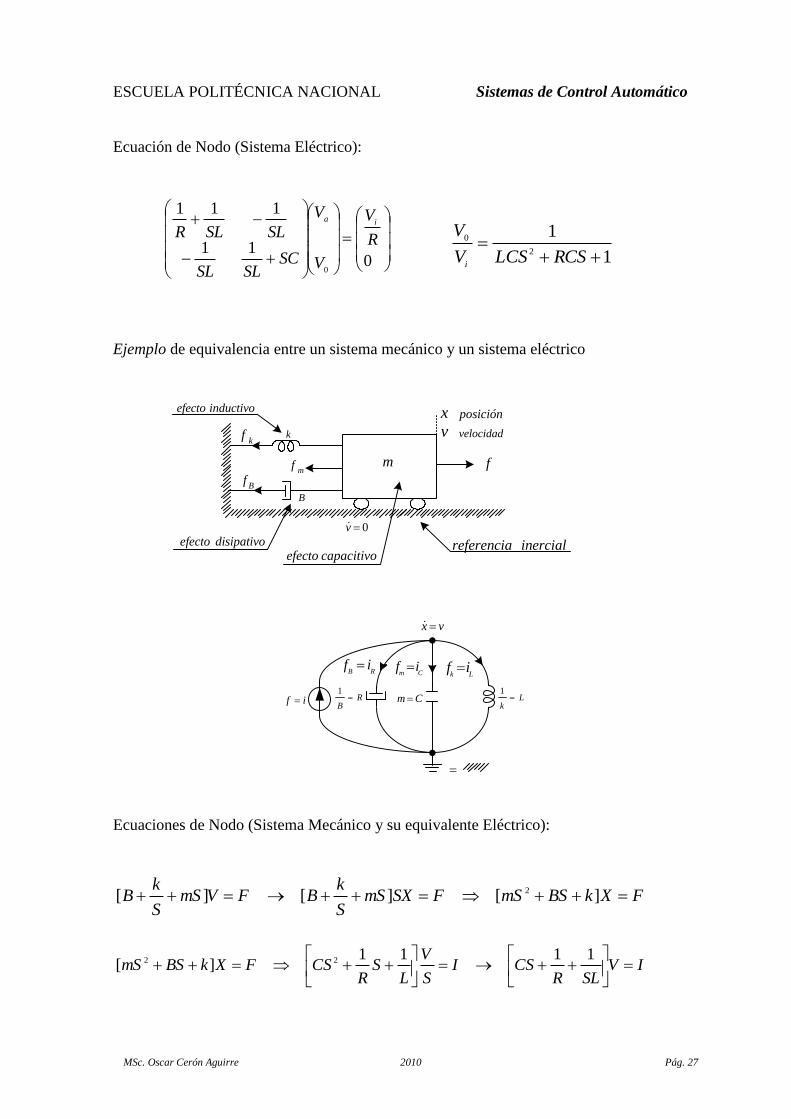
Ecuación de Nodo (Sistema Eléctrico):
011
111
0
R
V
V
V
SCSLSL
SLSLRia
1
12
0
RCSLCSV
V
i
Ejemplo de equivalencia entre un sistema mecánico y un sistema eléctrico
0v
B
k
Bf
kf
mf f
vx
m
disipativoefecto
inductivoefecto
capacitivoefectoinercialreferencia
velocidad
posición
Cm RB
1
Lk
1
if
vx
RBif
Cmif
Lkif
Ecuaciones de Nodo (Sistema Mecánico y su equivalente Eléctrico):
FXkBSmSFSXmSS
kBFVmS
S
kB ][][][ 2
IVSLR
CSIS
V
LS
RCSFXkBSmS
1111][ 22

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 28
Equivalencias mecánicas: Traslación Rotación
f (fuerza) T (torque)
m (masa) J (inercia)
v (velocidad lineal) ω (velocidad angular)
x (desplazamiento) θ (posición)
B (rozamiento) B (fricción)
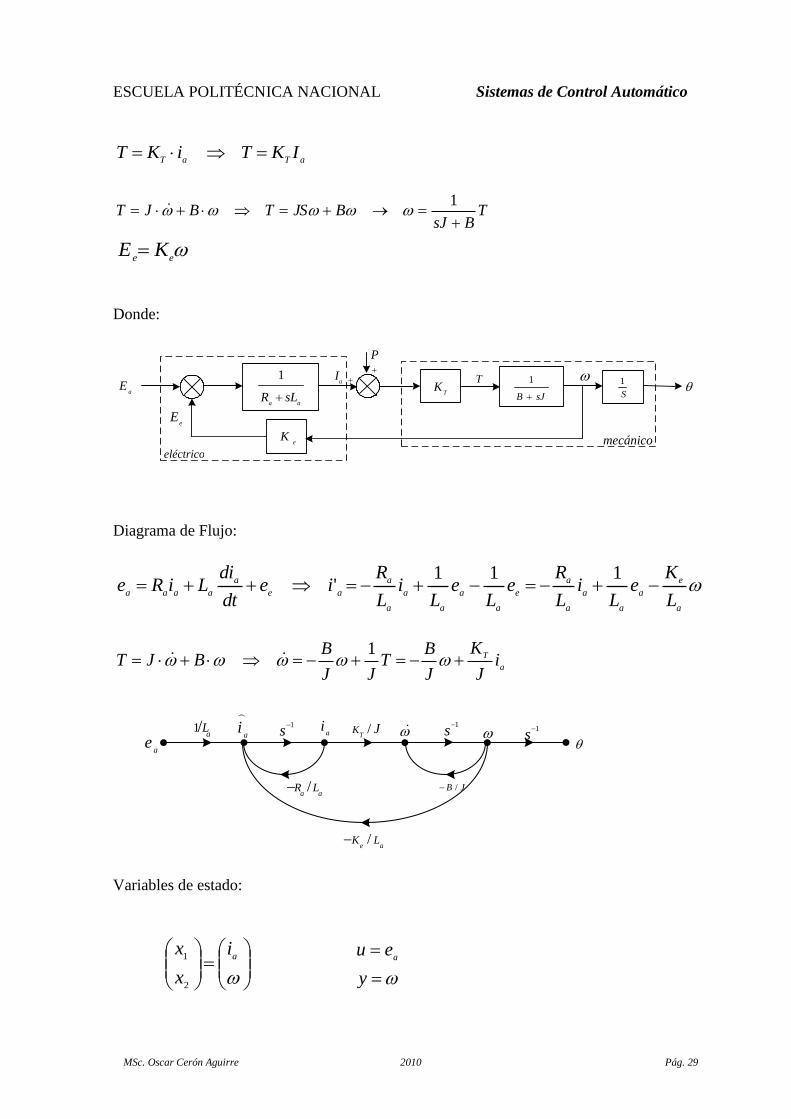
Ejemplo de un Modelo híbrido (Motor DC regulado por armadura)
ae
ee
,,T
constif
Ba
i
aR
aL
Ecuaciones Diferenciales
Sistema eléctrico: e
a
aaaae
dt
diLiRe
ee
Ke
Sistema mecánico: aTfaiKiiKT , puesto que f
i es constante
BJT
Diagrama de Bloque:
)(1
ea
aa
aeaaaaae
a
aaaaEE
sLRIEIsLIREe
dt
diLiRe
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 29
aTaTIKTiKT
TBsJ
BJSTBJT
1
ee
KE
Donde:
S
1
TK
eK
P
T
aasLR
1
sJB
1
aI
aE
eE
eléctrico
mecánico
Diagrama de Flujo:
a
e
a
a
a
a
a
e
a
a
a
a
a
a
ae
a
aaaaL
Ke
Li
L
Re
Le
Li
L
Rie
dt
diLiRe
111'
a
T iJ
K
J
BT
JJ
BBJT
1
ai
JT
K /
JB /
ae
ai
1s 1
s1
s
aaLR /
aeLK /
aL/1
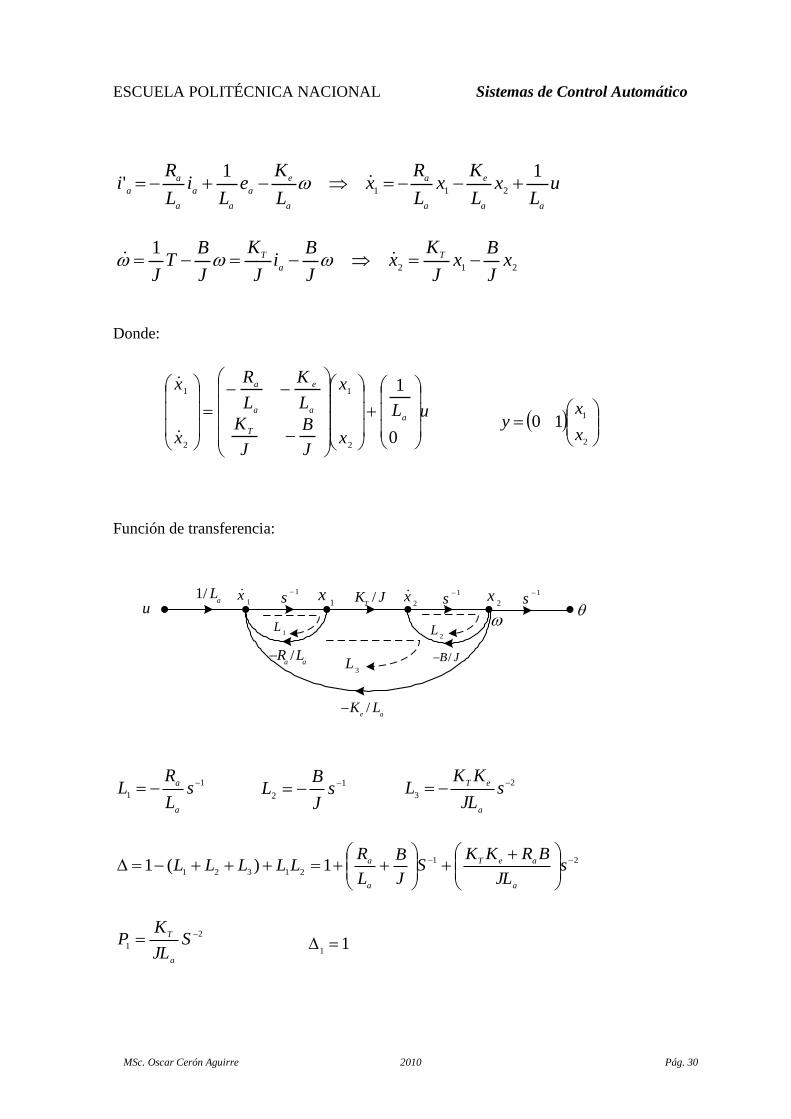
Variables de estado:
ai
x
x
2
1
y
eua
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 30
uL
xL
Kx
L
Rx
L
Ke
Li
L
Ri
aa
e
a
a
a
e
a
a
a
a
a
a
11'
211
212
1x
J
Bx
J
Kx
J
Bi
J
K
J
BT
J
T
a
T
Donde:
uL
x
x
J
B
J
K
L
K
L
R
x
x
a
T
a
e
a
a
0
1
2
1
2
1
2
110
x
xy
Función de transferencia:
1
x1
x2
x2
xu
1s
1s
1sJK
T/
aaLR /
aL/1
aeLK /
JB/
2L1
L
3L
1
1
sL
RL
a
a
1
2
sJ
BL
2
3
sJL
KKL
a
eT
21
213211)(1
s
JL
BRKKS
J
B
L
RLLLLL
a
aeT
a
a
2
1
SJL
KP
a
T
11
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 31
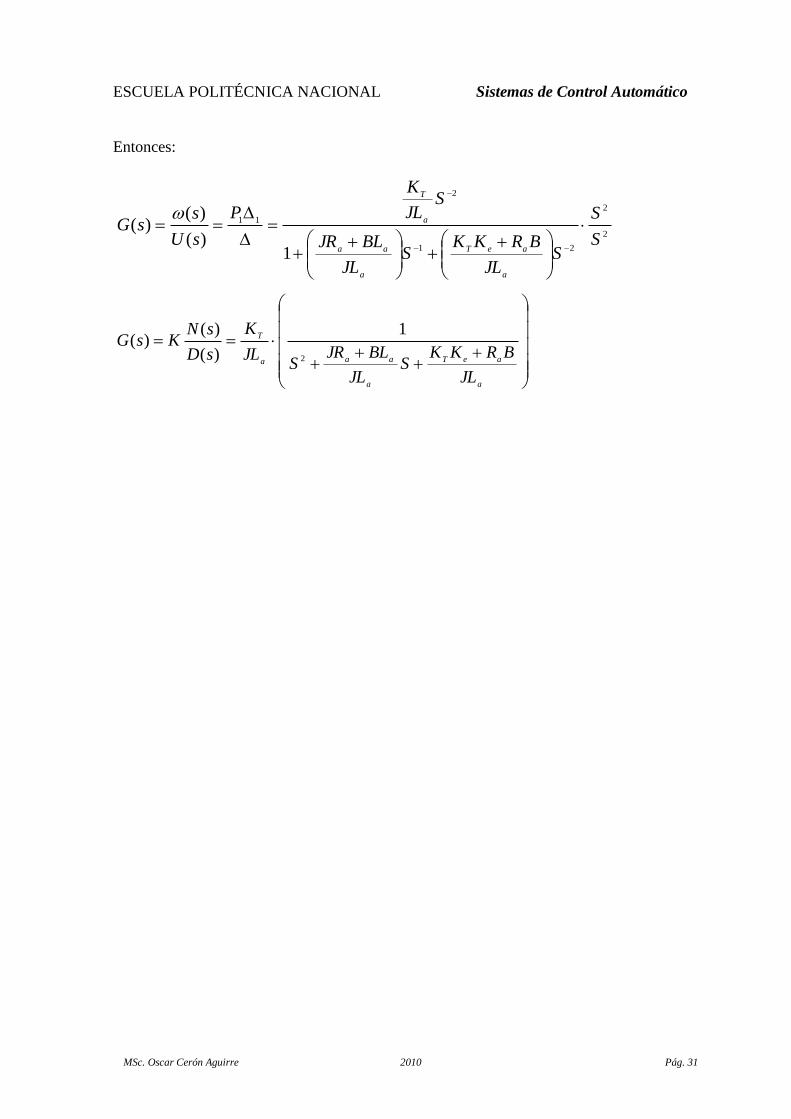
Entonces:
2
2
21
2
11
1)(
)()(
S
S
SJL
BRKKS
JL
BLJR
SJL
K
P
sU
ssG
a
aeT
a
aa
a
T
a
aeT
a
aaa
T
JL
BRKKS
JL
BLJRS
JL
K
sD
sNKsG
2
1
)(
)()(
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 32
ANÁLISIS: Características de respuesta de Sistemas Dinámicos
- Robustez: Confiabilidad alta
Sensibilidad baja (comportamiento o variación del Sistema)
Rechazo a perturbaciones (minimización de perturbaciones)
- Estabilidad: Sentido BIBO (entrada limitada – salida limitada)
Absoluta y Relativa
Condicional y Marginal
Global y Local
Sentido de Lyapunov
- Respuesta: Transitoria
Estado estable
DISEÑO: Especificaciones de respuesta de Sistemas Dinámicos
- Ajuste de ganancia
- Esquemas de compensación
- Redes de compensación
- Controladores PID
MÉTODOS
- Respuesta Temporal RT
- Lugar Geométrico de Raíces LGR
- Respuesta de Frecuencia RF
Por qué REALIMENTACIÓN?
a) Rechazo a perturbaciones
Lazo abierto:
u
1G
2G
P
yR
RGGuGyyyyPRPR
.2120
Entonces: PGyRP
.20
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 33
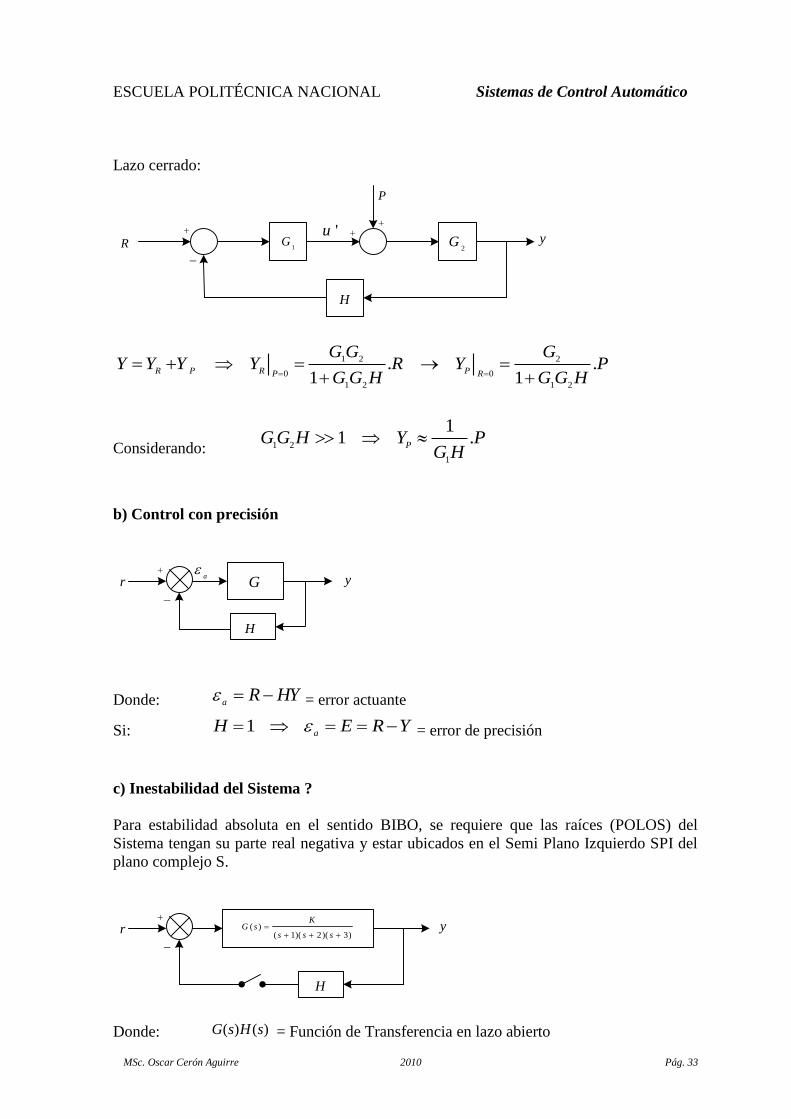
Lazo cerrado:
1G
2G
P
yR
H
'u
PHGG
GYR
HGG
GGYYYY
RPPRPR.
1.
121
2
0
21
21
0
Considerando: P
HGYHGG
P.
11
1
21
b) Control con precisión
r yG
H
a
Donde: HYRa
= error actuante
Si: YREHa
1 = error de precisión
c) Inestabilidad del Sistema ?
Para estabilidad absoluta en el sentido BIBO, se requiere que las raíces (POLOS) del
Sistema tengan su parte real negativa y estar ubicados en el Semi Plano Izquierdo SPI del
plano complejo S.
r y
H
)3)(2)(1()(
sss
KsG
Donde: )()( sHsG = Función de Transferencia en lazo abierto
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 34
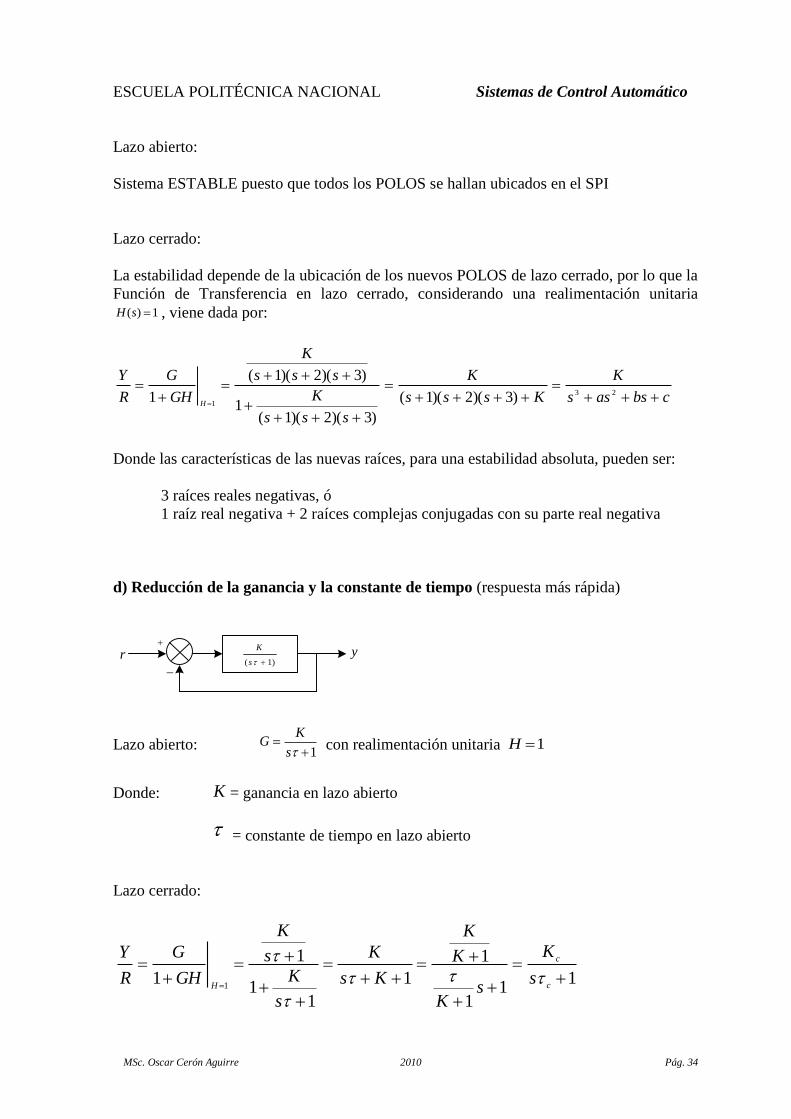
Lazo abierto:
Sistema ESTABLE puesto que todos los POLOS se hallan ubicados en el SPI
Lazo cerrado:
La estabilidad depende de la ubicación de los nuevos POLOS de lazo cerrado, por lo que la
Función de Transferencia en lazo cerrado, considerando una realimentación unitaria 1)( sH , viene dada por:
cbsass
K
Ksss
K
sss
K
sss
K
GH
G
R
Y
H
23
1)3)(2)(1(
)3)(2)(1(1
)3)(2)(1(
1
Donde las características de las nuevas raíces, para una estabilidad absoluta, pueden ser:
3 raíces reales negativas, ó
1 raíz real negativa + 2 raíces complejas conjugadas con su parte real negativa
d) Reducción de la ganancia y la constante de tiempo (respuesta más rápida)
r y)1( s
K
Lazo abierto: 1
s
KG con realimentación unitaria 1H
Donde: K = ganancia en lazo abierto
= constante de tiempo en lazo abierto
Lazo cerrado:
11
1
1
1
11
1
11
c
c
Hs
K
sK
K
K
Ks
K
s
Ks
K
GH
G
R
Y

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 35
Donde: cK = ganancia en lazo cerrado =
1K
K
c = constante de tiempo en lazo cerrado =
1K
Por lo tanto, al tener en lazo cerrado una constante de tiempo disminuida, la respuesta del
Sistema es más rápida.
e) Sensibilidad
Lazo abierto:
yGr
RGY . GGG YYY
Entonces: RGYRGGYY .).()(
Lazo cerrado:
r yG
H
RGH
GY .
1 R
HGGGH
GYR
HGG
GGYY .
]).(1)[1(.
).(1
Si se considera G pequeño, entonces: RGH
GY .
)1( 2
La sensibilidad se puede cuantificar de la siguiente forma:
G
KS = sensibilidad del Sistema G con respecto al parámetro K
Donde, para variaciones pequeñas, se tiene: K
G
G
K
K
G
G
K
K
KG
G
S G
K
..
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 36
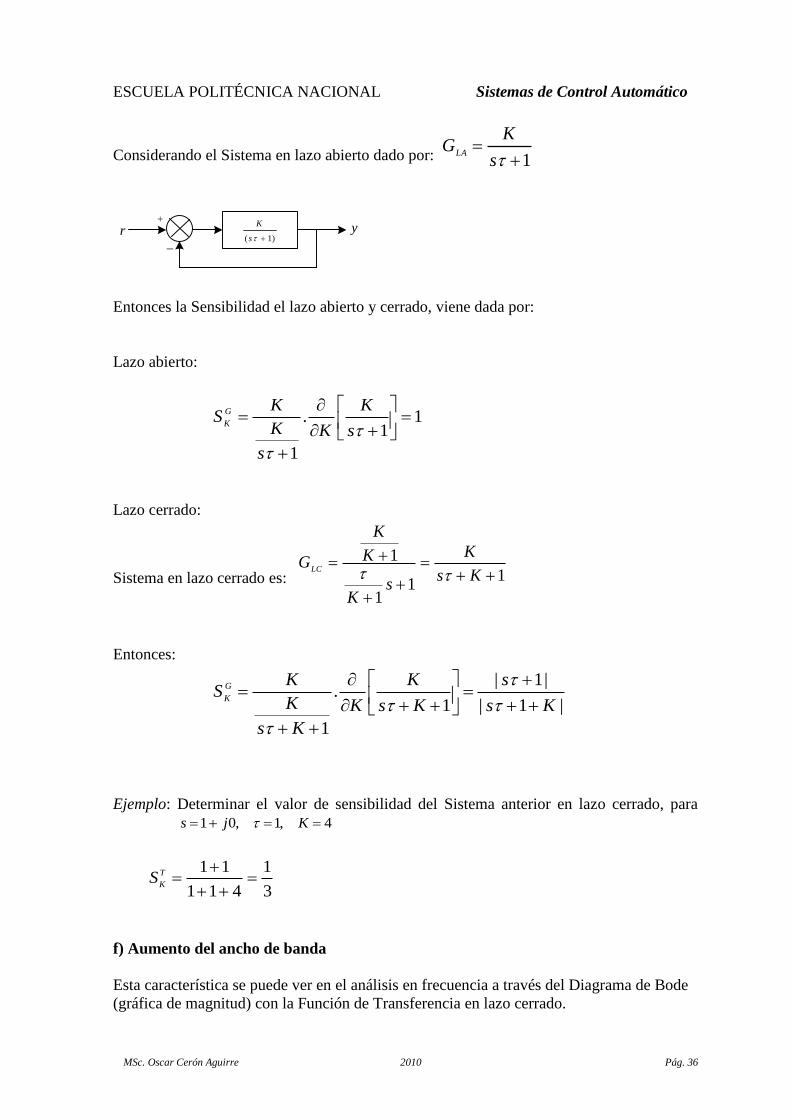
Considerando el Sistema en lazo abierto dado por: 1
s
KG
LA
r y)1( s
K
Entonces la Sensibilidad el lazo abierto y cerrado, viene dada por:
Lazo abierto:
11
.
1
s
K
K
s
K
KS G
K
Lazo cerrado:
Sistema en lazo cerrado es: 11
1
1
Ks
K
sK
K
K
GLC
Entonces:
|1|
|1|
1.
1
Ks
s
Ks
K
K
Ks
K
KS G
K
Ejemplo: Determinar el valor de sensibilidad del Sistema anterior en lazo cerrado, para
4,1,01 Kjs
3
1
411
11
T
KS
f) Aumento del ancho de banda
Esta característica se puede ver en el análisis en frecuencia a través del Diagrama de Bode
(gráfica de magnitud) con la Función de Transferencia en lazo cerrado.
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 37
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
G = 1 / (s + 1)
Tiempo (sec)
Am
plitu
d
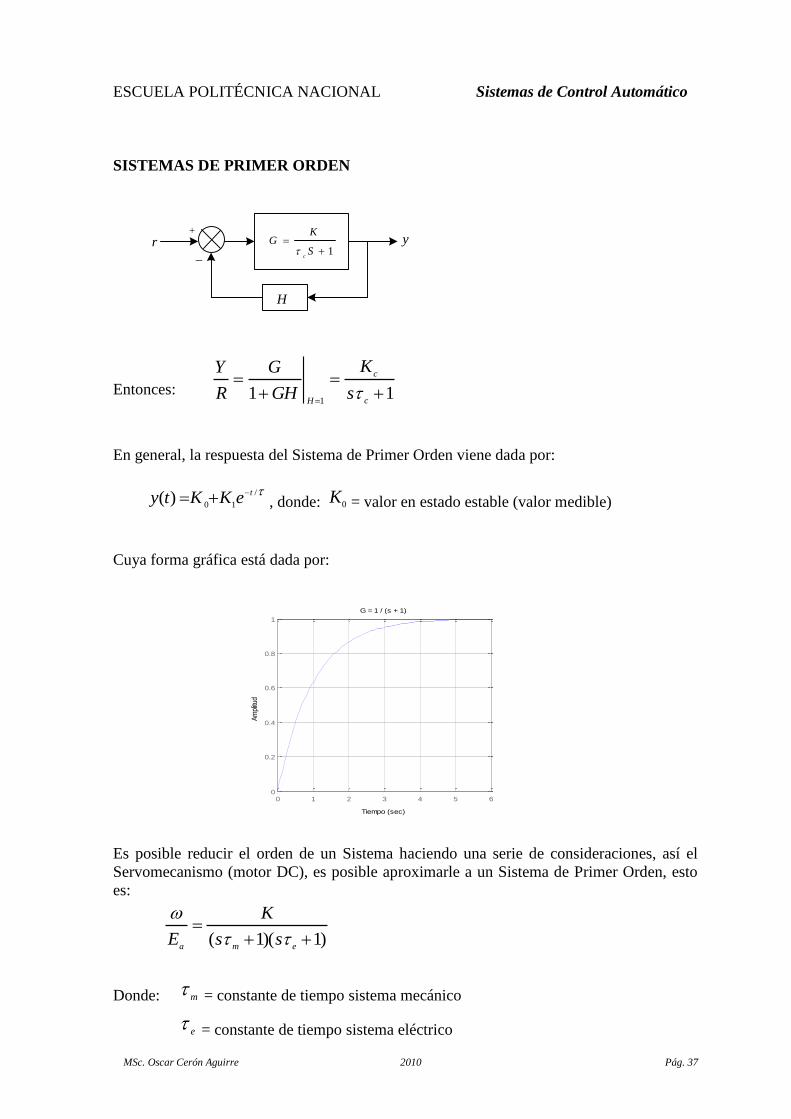
SISTEMAS DE PRIMER ORDEN
r y
H
1
S
KG
c
Entonces: 111
c
c
Hs
K
GH
G
R
Y
En general, la respuesta del Sistema de Primer Orden viene dada por:
/
10)( teKKty , donde: 0
K = valor en estado estable (valor medible)
Cuya forma gráfica está dada por:
Es posible reducir el orden de un Sistema haciendo una serie de consideraciones, así el
Servomecanismo (motor DC), es posible aproximarle a un Sistema de Primer Orden, esto
es:
)1)(1(
emass
K
E
Donde: m = constante de tiempo sistema mecánico
e = constante de tiempo sistema eléctrico

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 38
Si: ][][ msegsegem
)1(
mas
K
E
También en general se puede considerar: )1(
mas
K
E
SISTEMAS DE SEGUNDO ORDEN
r y)2(
2
n
n
ss
Donde: 22
2
21nn
n
ssG
G
R
Y
naturalfrecuencian
ientoamortiguamdeíndice
ientoamortiguamdeecoeficientn
En general, la respuesta del Sistema de Segundo Orden viene dada por:
2/
2
1/
10)(
tt
eKeKKty
Donde: 0K = valor en estado estable (valor medible)
De acuerdo al modelo estándar del Sistema de Segundo Orden, las raíces (POLOS) de la
Función de Transferencia, vienen dados por:
02 22
nnss 12
2,1
nnp
Dependiendo del valor del índice de amortiguamiento se tienen los siguientes Casos:
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 39
0 1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
G = 3 / (s*s + 4s +3)
Tiempo (sec)
Am
plitu
d
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
G =4 / (s*s + 4s + 4)
Tiempo (sec)
Am
plitu
d
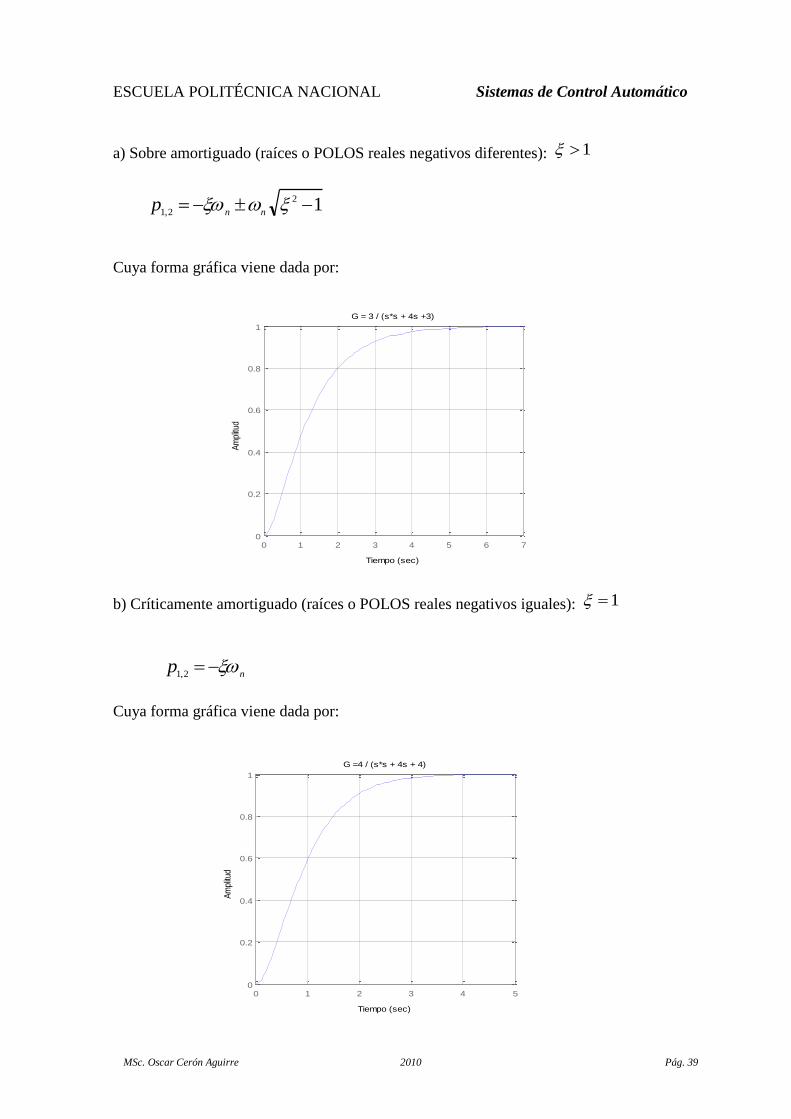
a) Sobre amortiguado (raíces o POLOS reales negativos diferentes): 1
12
2,1
nnp
Cuya forma gráfica viene dada por:
b) Críticamente amortiguado (raíces o POLOS reales negativos iguales): 1
np
2,1
Cuya forma gráfica viene dada por:
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 40
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
G = 5 / (s*s + 2s + 5)
Tiempo (sec)
Am
plitu
d
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
G = 2 / (s*s + 4)
Tiempo (sec)
Am
plitu
d
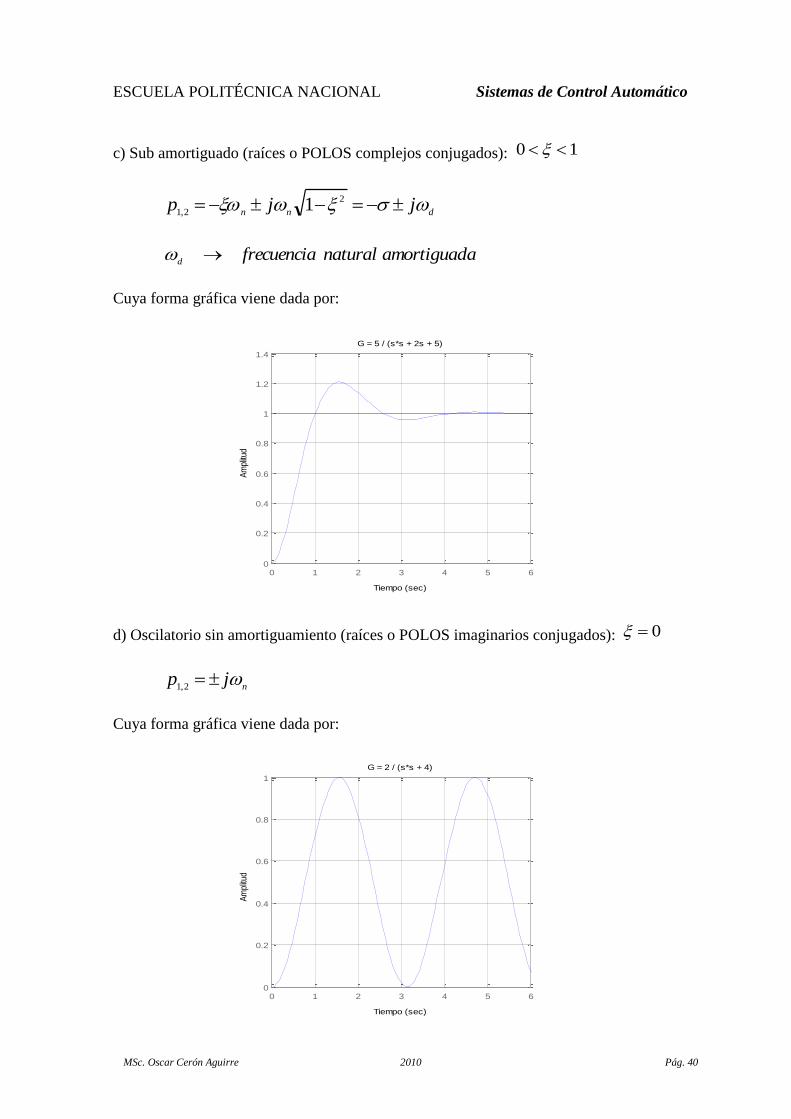
c) Sub amortiguado (raíces o POLOS complejos conjugados): 10
dnnjjp 2
2,11
aamortiguadnaturalfrecuenciad
Cuya forma gráfica viene dada por:
d) Oscilatorio sin amortiguamiento (raíces o POLOS imaginarios conjugados): 0
njp
2,1
Cuya forma gráfica viene dada por:
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 41
Ejemplo: obtener la Función de Transferencia del Sistema de Segundo Orden dado por:
R Y)2(
1
SS
Ks1
Se debe considerar el modelo general dado por:
G
H
R Y
Donde: G
G
D
NKG
1
y H
H
D
NH
Entonces: HGHG
HG
H
H
G
G
G
G
NNKDD
DNK
D
N
D
NK
D
NK
GH
G
R
Y
...
.
.11
1
1
1
1
Para este ejemplo se tiene que: )2(
1
ss
KG y 1
1 KsH
Por lo que: 11
2
1
1
1
)2()1()2( KsKKs
K
KsKss
K
R
Y

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 42
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
G = 6 / [(s+1)(s+2)(s+3)]
Tiempo (sec)
Am
plitu
d
SISTEMAS DE TERCER ORDEN
Se puede considerar un Sistema constituido por dos componentes, una de Primer Orden en
cascada con otra de Segundo Orden, como se muestra en la figura.
22
2
2nn
n
ss
ps
p
En general: )1)(1)(1(321 sss
K
Donde: 3
/
3
2/
2
1/
10)(
ttt
eKeKeKKty
0K = valor en estado estable (valor medible)
Cuya forma gráfica viene dada por:
IDENTIFICACIÓN tiene que ver con la determinación de las constantes: iK y i
SISTEMAS DE ORDEN SUPERIOR: Dependerá de los llamados POLOS dominantes.
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 43
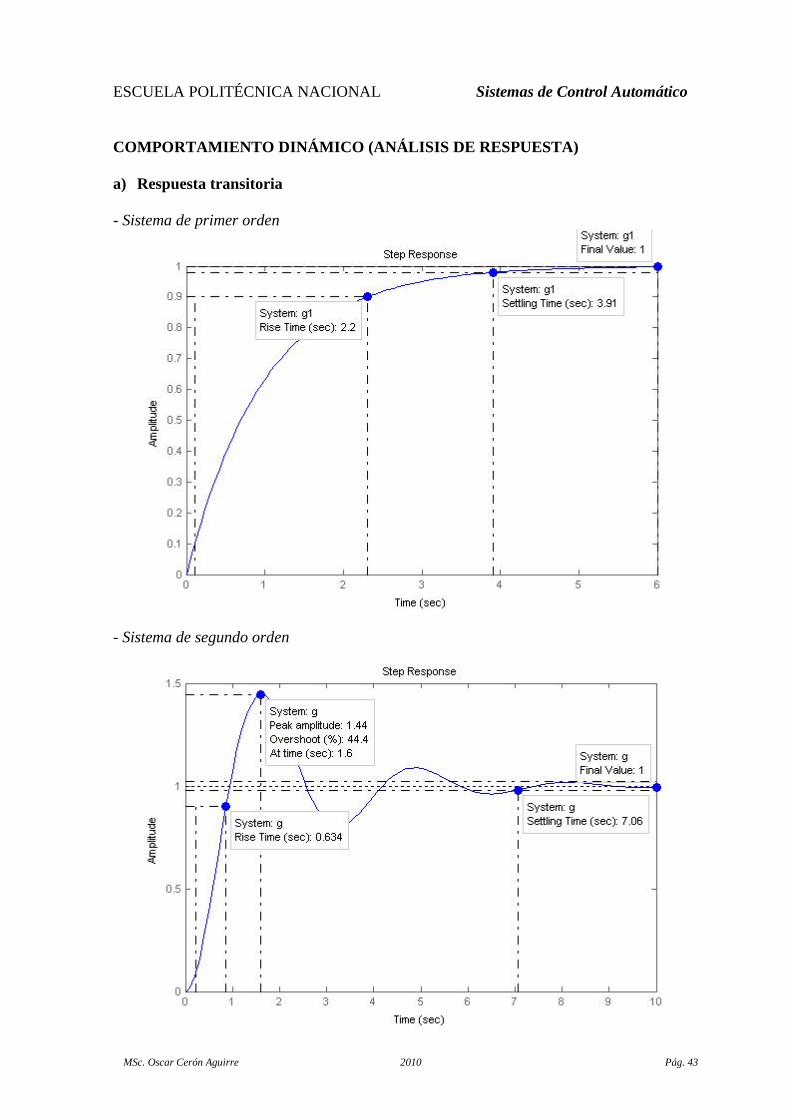
COMPORTAMIENTO DINÁMICO (ANÁLISIS DE RESPUESTA)
a) Respuesta transitoria
- Sistema de primer orden
- Sistema de segundo orden
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 44
- Rapidez de respuesta (duración del transitorio)
ts = tiempo de establecimiento
tr = tiempo de subida
τ = constante de tiempo
ωn = frecuencia natural
- Estabilidad relativa (oscilación del sistema)
Mp = máximo sobreimpulso
tp= tiempo de máximo sobreimpulso
ξ = índice de amortiguamiento
Valores para propósitos generales:
seg
n
11
)4(4
%)2(4 segtterrordemargents
n
ss
)3(
3%)5(3 segtterrordemargent
s
n
ss
2n
5.0
21
n
pt
%20100%
21
ep
M
b) Respuesta estable (estado permanente)
Precisión: Ep = error de posición (entrada escalón)
Ev = error de velocidad (entrada rampa)
Ea = error de aceleración (entrada parabólica)
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 45
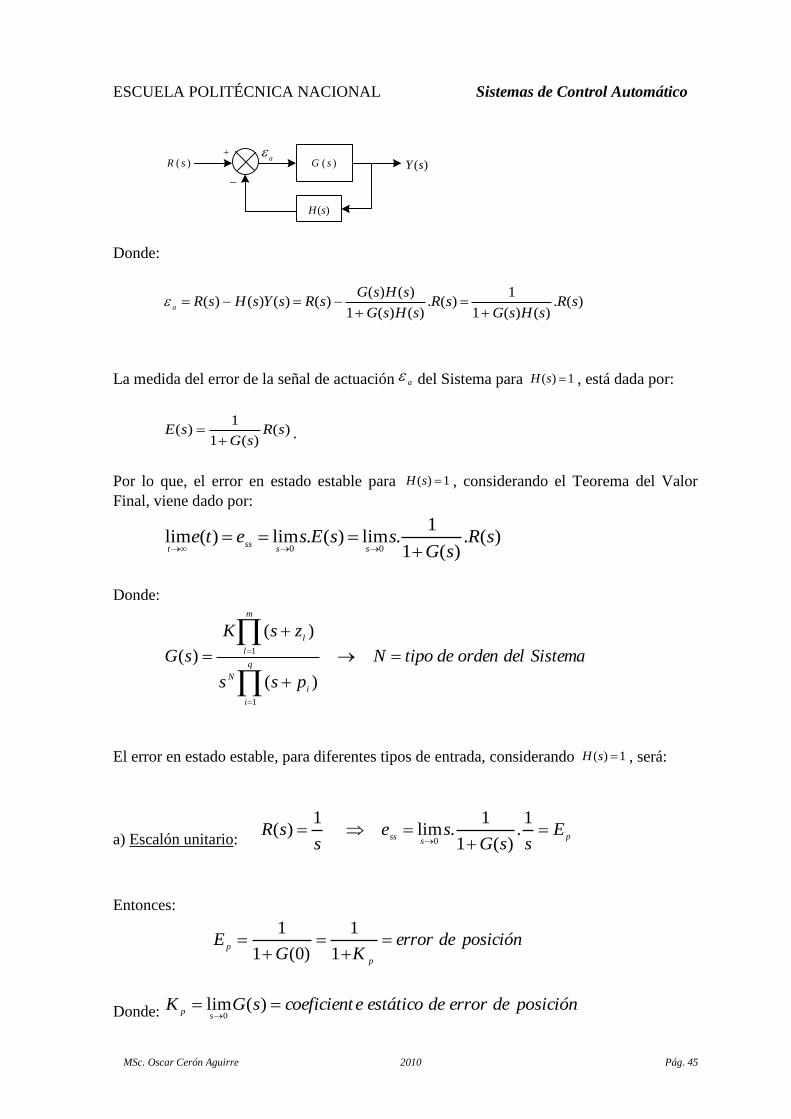
)( sG
)(sH
)( sR )(sYa
Donde:
)(.)()(1
1)(.
)()(1
)()()()()()( sR
sHsGsR
sHsG
sHsGsRsYsHsR
a
La medida del error de la señal de actuación a del Sistema para 1)( sH , está dada por:
)()(1
1)( sR
sGsE
.
Por lo que, el error en estado estable para 1)( sH , considerando el Teorema del Valor
Final, viene dado por:
)(.)(1
1.lim)(.lim)(lim
00sR
sGssEsete
ssss
t
Donde:
SistemadelordendetipoN
pss
zsK
sGq
i
i
N
m
l
l
1
1
)(
)(
)(
El error en estado estable, para diferentes tipos de entrada, considerando 1)( sH , será:
a) Escalón unitario: ps
ssE
ssGse
ssR
1.
)(1
1.lim
1)(
0
Entonces:
posicióndeerror
KGE
p
p
1
1
)0(1
1
Donde: posicióndeerrordeestáticoecoeficientsGKs
p
)(lim
0

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 46
Para N = 0 (Sistema tipo 0), se tiene:
q
i
i
m
l
ls
ppzKGsGK
110
)0()(lim
Para 1N (Sistemas tipo N) el error de posición será: 0p
E
b) Rampa unitaria:
vsss
ssE
ssGssGsssGse
ssR
)(
1lim
)(
1lim
1.
)(1
1.lim
1)(
00202
Entonces:
velocidaddeerror
KssGE
vs
v
1
)(
1lim
0
Donde: velocidaddeerrordeestáticoecoeficientssGKs
v
)(lim
0
Para N = 0 (Sistema tipo 0), se tiene:
v
q
i
i
m
l
lss
vEpzKssGsK 0.lim)(.lim
1100
Para N = 1 (Sistema tipo 1), se tiene:
q
i
i
m
l
l
q
i
i
m
l
lss
vpzKpz
s
KssGsK
111100
.lim)(.lim
Para 2N (Sistemas tipo N) el error de velocidad será: 0v
E

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 47
c) Parábola unitaria:
asss
ssE
sGssGssssGse
ssR
)(
1lim
)(
1lim
1.
)(1
1.lim
1)(
20220303
Entonces:
naceleraciódeerror
KsGsE
as
a
1
)(
1lim
20
Donde: naceleraciódeerrordeestáticoecoeficientsGsKs
a
)(.lim 2
0
Para N = 0, 1 (Sistema tipo 0 y 1), se tiene:
0.lim.lim)(.lim11
011
2
0
2
0
q
i
i
m
l
ls
q
i
i
m
l
lss
apzKspz
s
KssGsK
Por lo que: a
E
Para N = 2 (Sistema tipo 2), se tiene:
q
i
i
m
l
l
q
i
i
m
l
lss
apzKpz
s
KssGsK
1111
2
2
0
2
0.lim)(.lim
Para 3N (Sistemas tipo N) el error de aceleración será: 0a
E
Otras formas usadas para Sistemas de segundo orden, tipo 1 y 2
Tipo 1 (N = 1) → )2()(
1
2
n
n
sssG
Tipo 2 (N = 2) → 2
)2()(
s
ssG nn
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 48
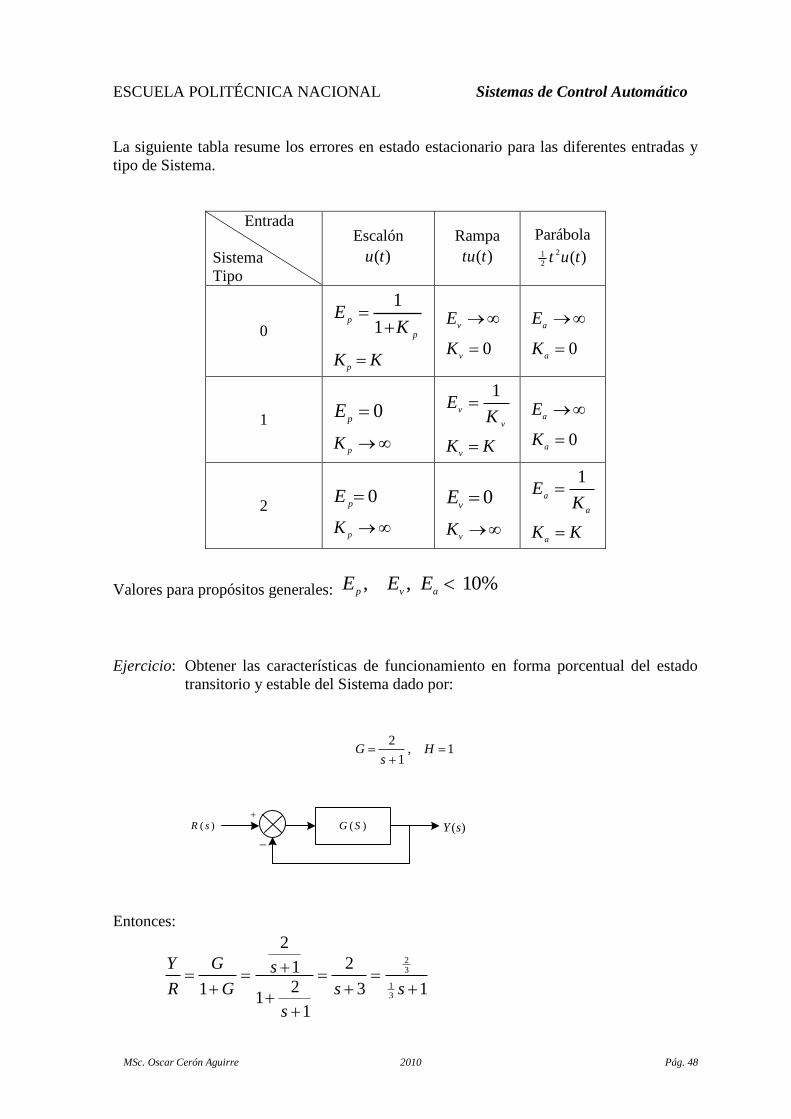
La siguiente tabla resume los errores en estado estacionario para las diferentes entradas y
tipo de Sistema.
Entrada
Sistema
Tipo
Escalón
)(tu
Rampa
)(ttu
Parábola
)(2
2
1 tut
0 p
pK
E
1
1
KKp
v
E
0v
K
a
E
0a
K
1
0p
E
p
K
v
vK
E1
KKv
a
E
0a
K
2
0p
E
p
K
0v
E
v
K
a
aK
E1
KKa
Valores para propósitos generales: %10,, avp
EEE
Ejercicio: Obtener las características de funcionamiento en forma porcentual del estado
transitorio y estable del Sistema dado por:
1,1
2
H
sG
)(SG)( sR )(sY
Entonces:
13
2
1
21
1
2
1 31
32
ss
s
s
G
G
R
Y

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 49
0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
G = 2 / (s + 3)
Tiempo (sec)
Am
plitu
d
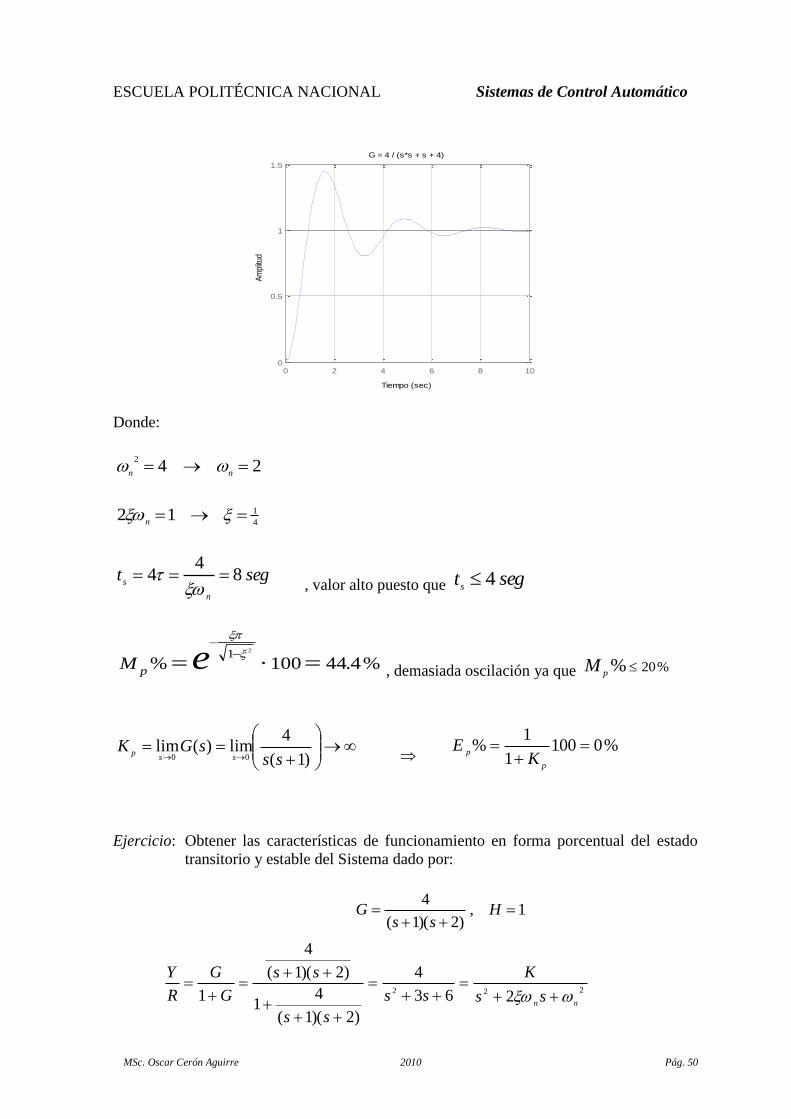
Donde: seg13
1
segtsegtss
443
4
%0p
M debido a que no oscila
21
2lim)(lim
00
ssGK
ssp
%3.331001
1%
p
pK
E
Error demasiado alto, puesto que %10% p
E , por lo que necesita un controlador para
bajar su valor.
Ejercicio: Obtener las características de funcionamiento en forma porcentual del estado
transitorio y estable del Sistema dado por:
1,)1(
4
H
ssG
22224
4
)1(
41
)1(
4
1nn
ss
K
ss
ss
ss
G
G
R
Y
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 50
0 2 4 6 8 100
0.5
1
1.5
G = 4 / (s*s + s + 4)
Tiempo (sec)
Am
plitu
d
Donde:
242
nn
4
112 n
segtn
s8
44
, valor alto puesto que segts
4
%4.44100%21
ep
M , demasiada oscilación ya que %20% p
M
)1(
4lim)(lim
00 sssGK
ssp
%01001
1%
p
pK
E
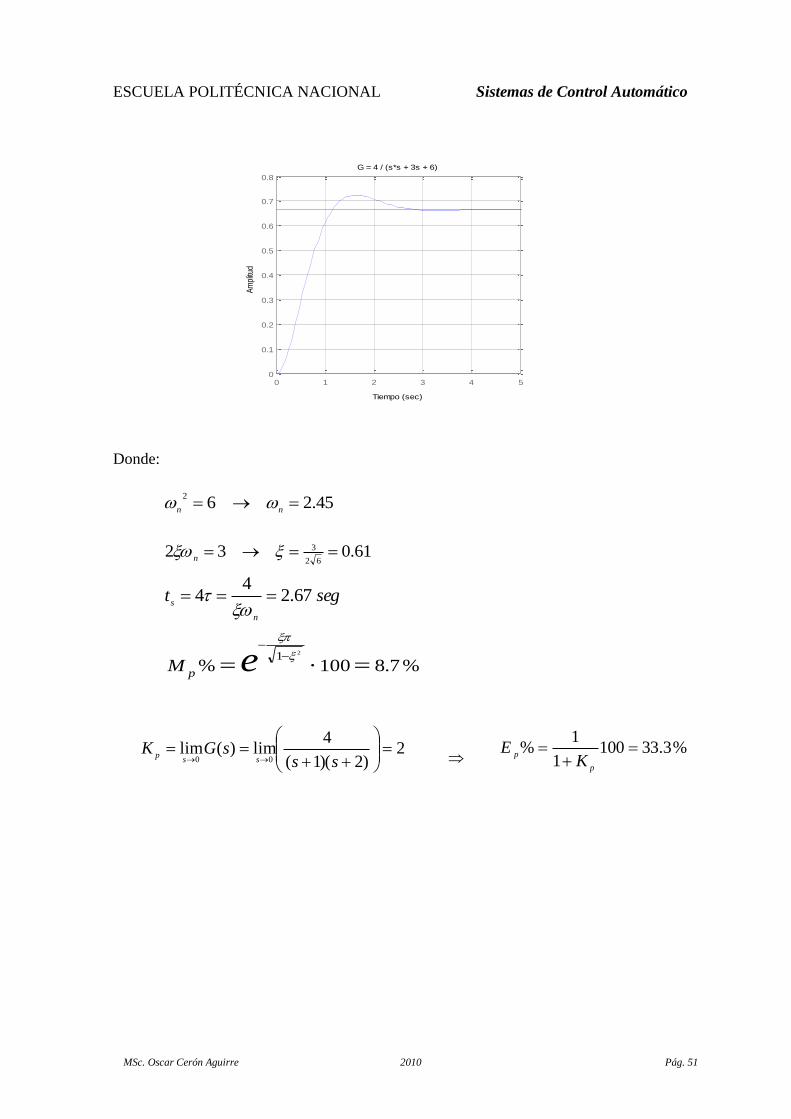
Ejercicio: Obtener las características de funcionamiento en forma porcentual del estado
transitorio y estable del Sistema dado por:
1,)2)(1(
4
H
ssG
222263
4
)2)(1(
41
)2)(1(
4
1nn
ss
K
ss
ss
ss
G
G
R
Y
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 51
0 1 2 3 4 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
G = 4 / (s*s + 3s + 6)
Tiempo (sec)
Am
plitu
d
Donde:
45.262
nn
61.03262
3 n
segtn
s67.2
44
%7.8100%21
ep
M
2)2)(1(
4lim)(lim
00
sssGK
ssp
%3.331001
1%
p
pK
E

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 52
Efecto de POLOS y CEROS
H
GR Y
Lazo abierto: GH = Ganancia en lazo abierto
Lazo cerrado: GH
GG
R
YRHYRGY
LC
1
).(
donde: )(01 cerradolazoenPOLOSticacaracterísEcuaciónGH
ticocaracterísPolinomioGHsP 1)(
Los POLOS determinan la respuesta mientras que los CEROS influyen sobre la magnitud
de la respuesta.
Los POLOS dan la característica de estabilidad del Sistema.
Los Sistemas Estables tienen POLOS en lazo cerrado a la izquierda del plano “s”, mientras
que los Sistemas de Fase No Mínima tienen CEROS a la derecha (ganancia negativa).
- Zona de ubicación de POLOS
Considerando un par de POLOS complejos conjugados, cuyos valores están dados por:
dnnjjp 2
2,11
X
X
j
n
0
n
21
nj
21
nj
1p
2p
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 53
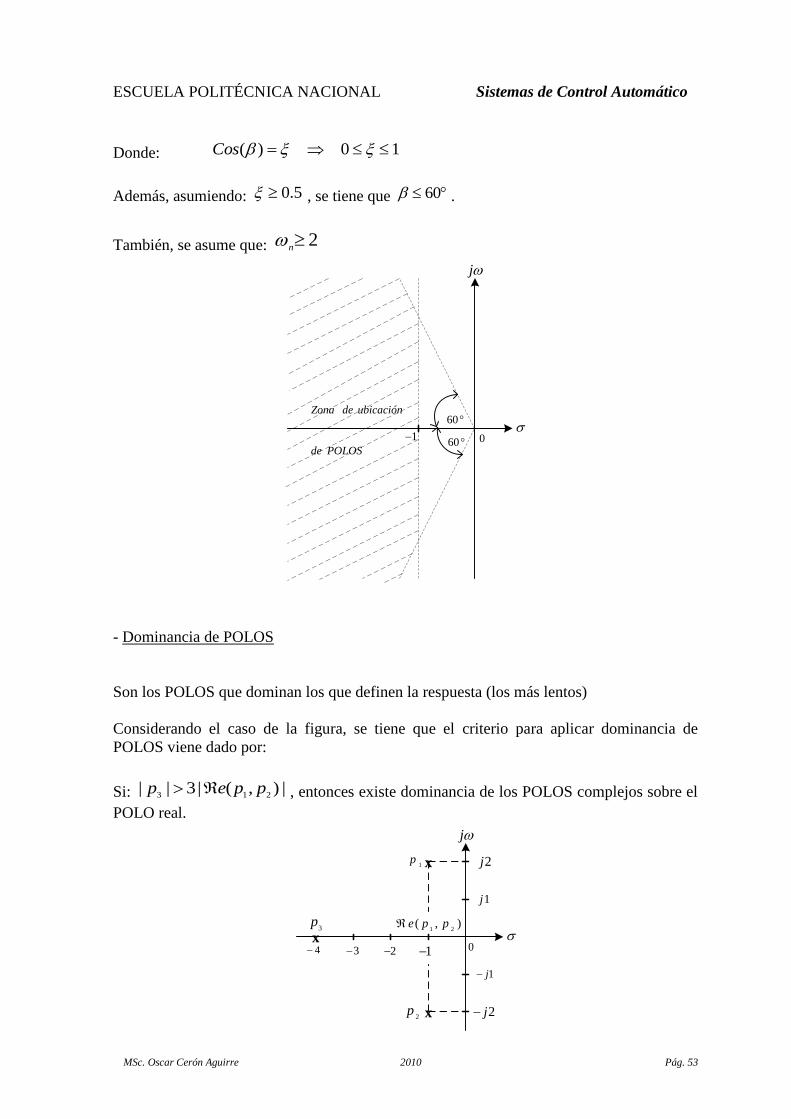
Donde: 10)( Cos
Además, asumiendo: 5.0 , se tiene que 60 .
También, se asume que: 2n
60
601
j
0POLOSde
ubicacióndeZona
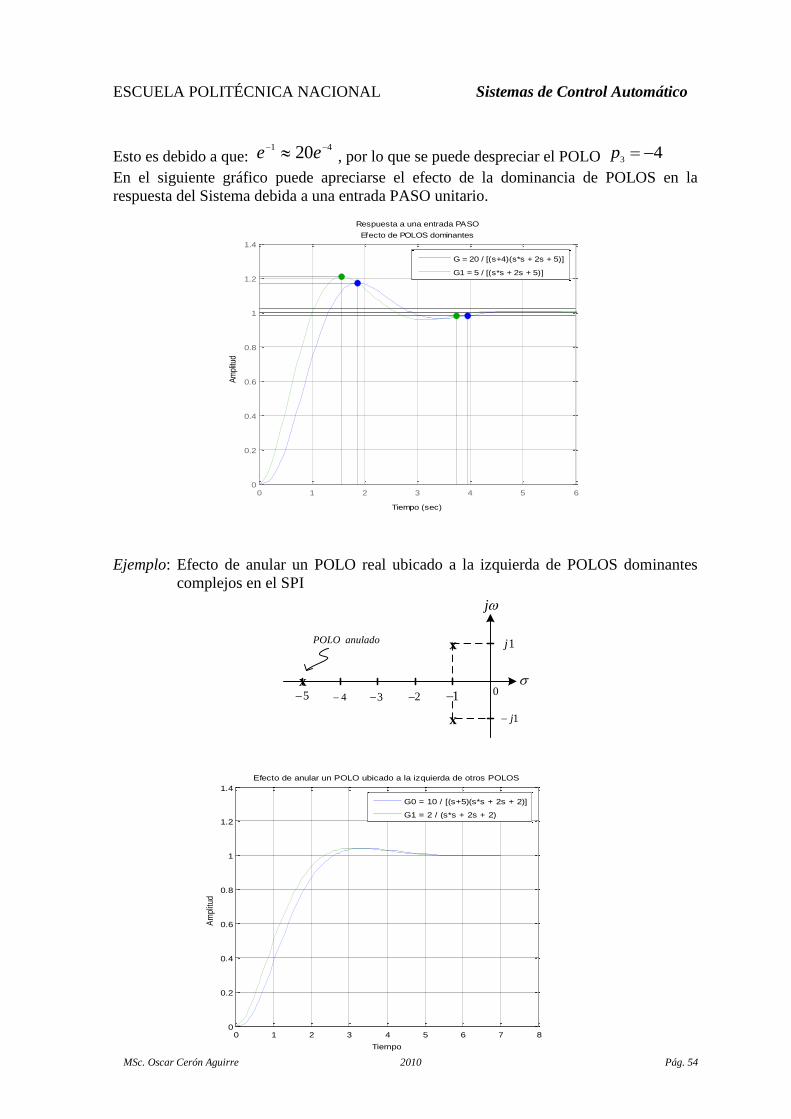
- Dominancia de POLOS
Son los POLOS que dominan los que definen la respuesta (los más lentos)
Considerando el caso de la figura, se tiene que el criterio para aplicar dominancia de
POLOS viene dado por:
Si: |),(|3||213
ppep , entonces existe dominancia de los POLOS complejos sobre el
POLO real.
j
1j
2j
2j
123
x
x
04
1j
x),(
21ppe
1p
2p
3p
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 54
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo
Am
plitu
d
Efecto de anular un POLO ubicado a la izquierda de otros POLOS
G0 = 10 / [(s+5)(s*s + 2s + 2)]
G1 = 2 / (s*s + 2s + 2)
Esto es debido a que: 41 20 ee , por lo que se puede despreciar el POLO 4
3p
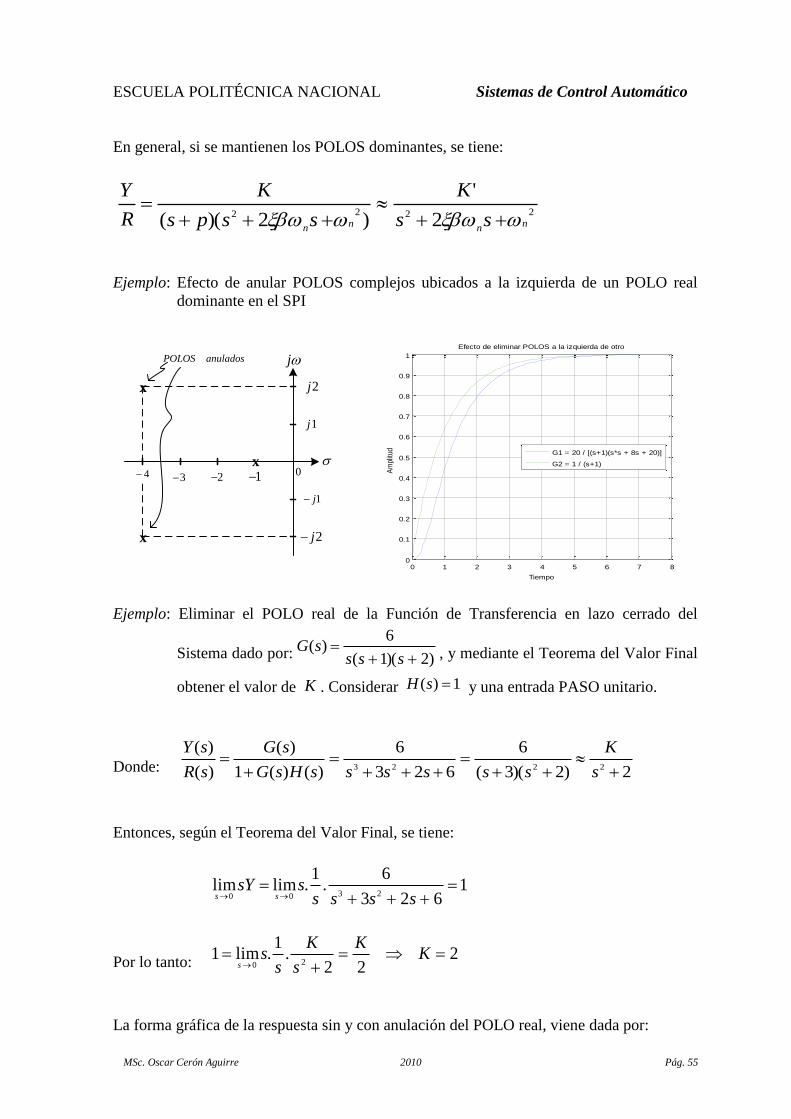
En el siguiente gráfico puede apreciarse el efecto de la dominancia de POLOS en la
respuesta del Sistema debida a una entrada PASO unitario.
Respuesta a una entrada PASO
Efecto de POLOS dominantes
Tiempo (sec)
Am
plitu
d
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
G = 20 / [(s+4)(s*s + 2s + 5)]
G1 = 5 / [(s*s + 2s + 5)]
Ejemplo: Efecto de anular un POLO real ubicado a la izquierda de POLOS dominantes
complejos en el SPI
4
x3
j
1j
12
x
x
0
1j
5
anuladoPOLO
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 55
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tiempo
Am
plitu
d
Efecto de eliminar POLOS a la izquierda de otro
G1 = 20 / [(s+1)(s*s + 8s + 20)]
G2 = 1 / (s+1)
En general, si se mantienen los POLOS dominantes, se tiene:
2222 2
'
)2)(( nnnnss
K
ssps
K
R
Y
Ejemplo: Efecto de anular POLOS complejos ubicados a la izquierda de un POLO real
dominante en el SPI
3
j
1j
2j
2j
12
x
x
0
1j
4x
anuladosPOLOS
Ejemplo: Eliminar el POLO real de la Función de Transferencia en lazo cerrado del
Sistema dado por: )2)(1(
6)(
ssssG , y mediante el Teorema del Valor Final
obtener el valor de K . Considerar 1)( sH y una entrada PASO unitario.
Donde: 2)2)(3(
6
623
6
)()(1
)(
)(
)(2223
s
K
ssssssHsG
sG
sR
sY
Entonces, según el Teorema del Valor Final, se tiene:
1
623
6.
1.limlim
2300
ssssssY
ss
Por lo tanto: 2
22.
1.lim1
20
K
K
s
K
ss
s
La forma gráfica de la respuesta sin y con anulación del POLO real, viene dada por:
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 56
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Efecto de eliminar un POLO real
Tiempo (sec)
Am
plitu
d G1 = 6 / (s*s*s + 3s*s +2s +6)
G2 = 2 / (s*s + 2)
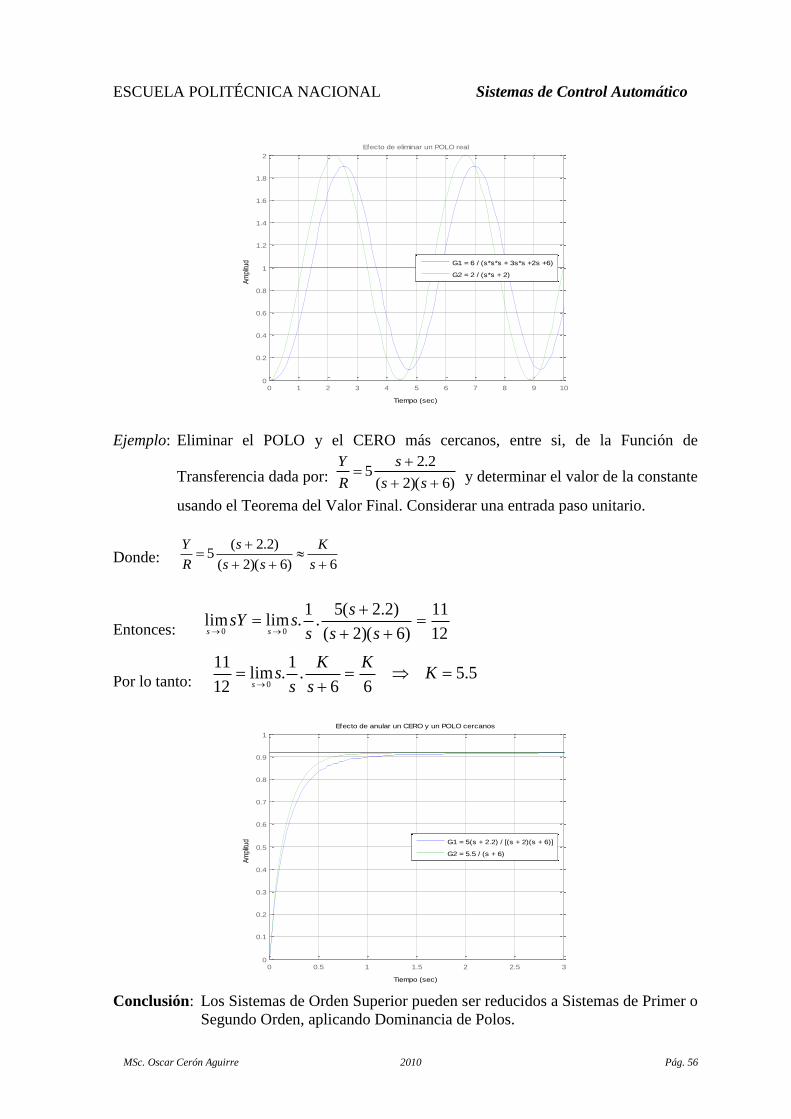
Ejemplo: Eliminar el POLO y el CERO más cercanos, entre si, de la Función de
Transferencia dada por: )6)(2(
2.25
ss
s
R
Y y determinar el valor de la constante
usando el Teorema del Valor Final. Considerar una entrada paso unitario.
Donde: 6)6)(2(
)2.2(5
s
K
ss
s
R
Y
Entonces: 12
11
)6)(2(
)2.2(5.
1.limlim
00
ss
s
sssY
ss
Por lo tanto: 5.5
66.
1.lim
12
110
KK
s
K
ss
s
0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Efecto de anular un CERO y un POLO cercanos
Tiempo (sec)
Am
plitu
d G1 = 5(s + 2.2) / [(s + 2)(s + 6)]
G2 = 5.5 / (s + 6)
Conclusión: Los Sistemas de Orden Superior pueden ser reducidos a Sistemas de Primer o
Segundo Orden, aplicando Dominancia de Polos.

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 57
- Estabilidad
Tiene que ver con: Conceptos (definiciones), Condiciones y Criterios.
Se tiene estabilidad en el sentido BIBO (Bounded Input – Bounded Output) y en el sentido
de LYAPUNOV.
Se usan los criterios de estabilidad de NYQUIST (frecuencia) y ROUTH – HURWITZ
(intervalo de variación de ganancia K).
El criterio de Hurwitz parte de la Función de Transferencia: GH
G
R
Y
1
Así, el polinomio característico del Sistema con realimentación unitaria 1)( sH , para el
siguiente Sistema viene dado por:
)2)(1( SS
Kr y
)2)(1(
SS
KG KSS
K
GH
GG
LC
)2)(1(1
Donde: )2(3)( 2 KsssP
Para este otro Sistema, se tiene:
)3)(1( SSS
Kr y
KSSS
K
R
Y
34 23
Donde: KSSSsP 34)( 23

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 58
El arreglo de Routh (en base a los coeficientes del polinomio característico) viene dado
por:
3S 1 3
2S 4 K
1S 1a 0
0S 1b
Donde: 4
12
4
1341
KKa
Ka
Kab
1
1
1
04
El criterio de estabilidad de Routh – Hurwitz dice que los coeficientes de la columna de
valores 1, 4, a1 y b1 deben ser mayores a 0 (positivos). Por lo tanto, de acuerdo a los
valores obtenidos, se tiene que:
01
Kb y 1204
121
KK
a
Entonces, el rango de variación de K viene dado por: 120 K
Si se elige el límite superior se tiene el K crítico, es decir: Kc = 12.
Para saber a que valores de S le corresponde el Kc, se considera una ecuación auxiliar de
segundo orden con los coeficientes de la fila 2S , así:
2,12,1
22 3012404 pjSSKSc
Ejemplo: arreglo de Routh para el polinomio: KsssssP 234 22)(
4S 2 1 K 3S 2 1 0
2S 1a 1
b
1S 2a 0
0S K

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 59
Donde: 0
2
)1).(2()1).(2(1
a
KK
b
2
)0).(2(.21
KK
a
baa 21
2).2()1.(
1
11
2
es un valor negativo
Nota: Si el elemento 1a es cero provocará que los elementos de las filas subsiguientes
sean infinitos, por lo que se debe reemplazar el cero por un valor pequeño ( ).
Si aparece una fila de ceros, prematuramente, es necesario reemplazar dicha fila por
coeficientes dados por la derivada del polinomio de la fila anterior.
Además, un Sistema tiene tantos POLOS en el semiplano derecho, como cambios de signo
de los elementos de la primera columna del arreglo de Routh.
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 60
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Tiempo
Am
plitu
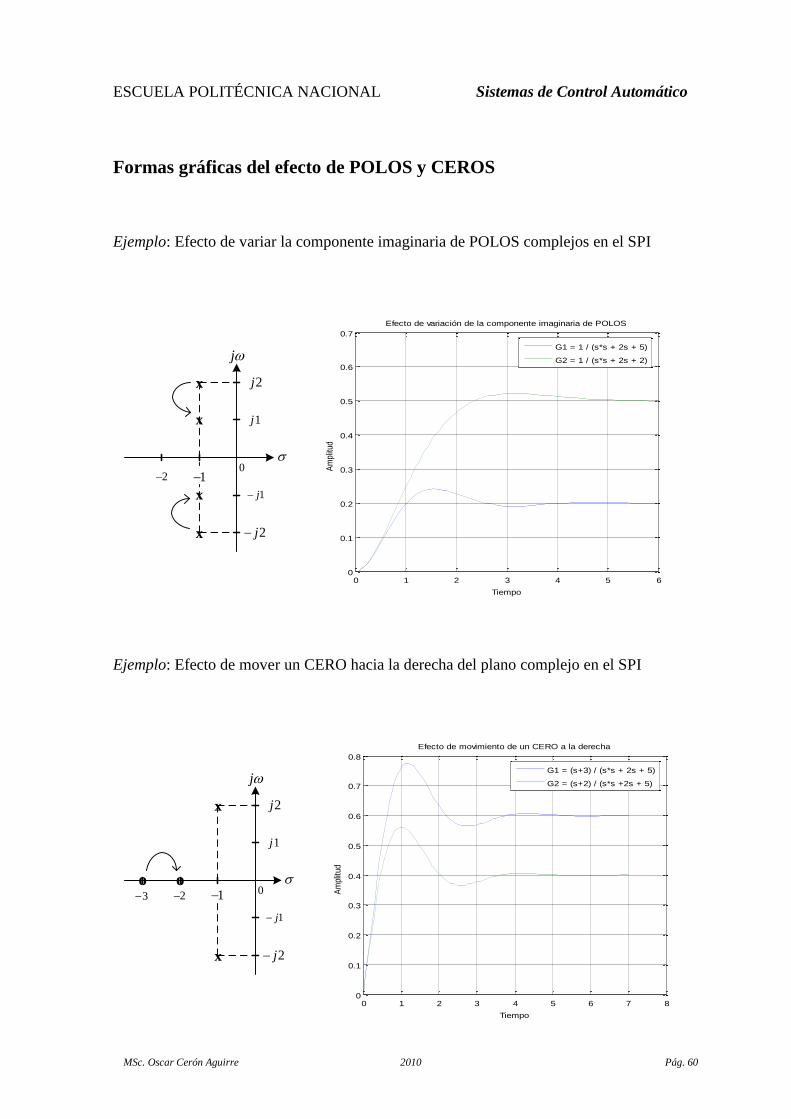
dEfecto de variación de la componente imaginaria de POLOS
G1 = 1 / (s*s + 2s + 5)
G2 = 1 / (s*s + 2s + 2)
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Tiempo
Am
plitu
d
Efecto de movimiento de un CERO a la derecha
G1 = (s+3) / (s*s + 2s + 5)
G2 = (s+2) / (s*s +2s + 5)
Formas gráficas del efecto de POLOS y CEROS
Ejemplo: Efecto de variar la componente imaginaria de POLOS complejos en el SPI
j
1j
2j
2j
12
x
x
0
1jx
x
Ejemplo: Efecto de mover un CERO hacia la derecha del plano complejo en el SPI
3
j
1j
2j
2j
12
x
x
0
1j
o o
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 61
0 1 2 3 4 5 6 7 80
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Tiempo
Am
plitu
d
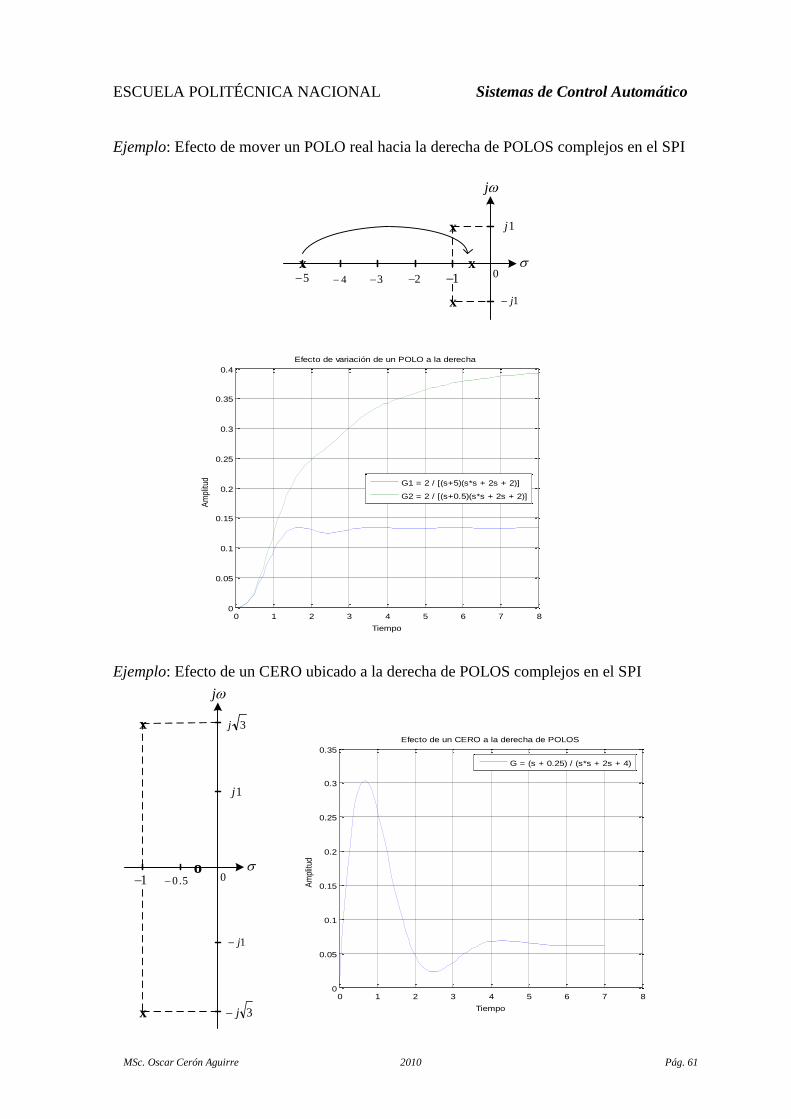
Efecto de variación de un POLO a la derecha
G1 = 2 / [(s+5)(s*s + 2s + 2)]
G2 = 2 / [(s+0.5)(s*s + 2s + 2)]
0 1 2 3 4 5 6 7 80
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Tiempo
Am
plitu
d
Efecto de un CERO a la derecha de POLOS
G = (s + 0.25) / (s*s + 2s + 4)
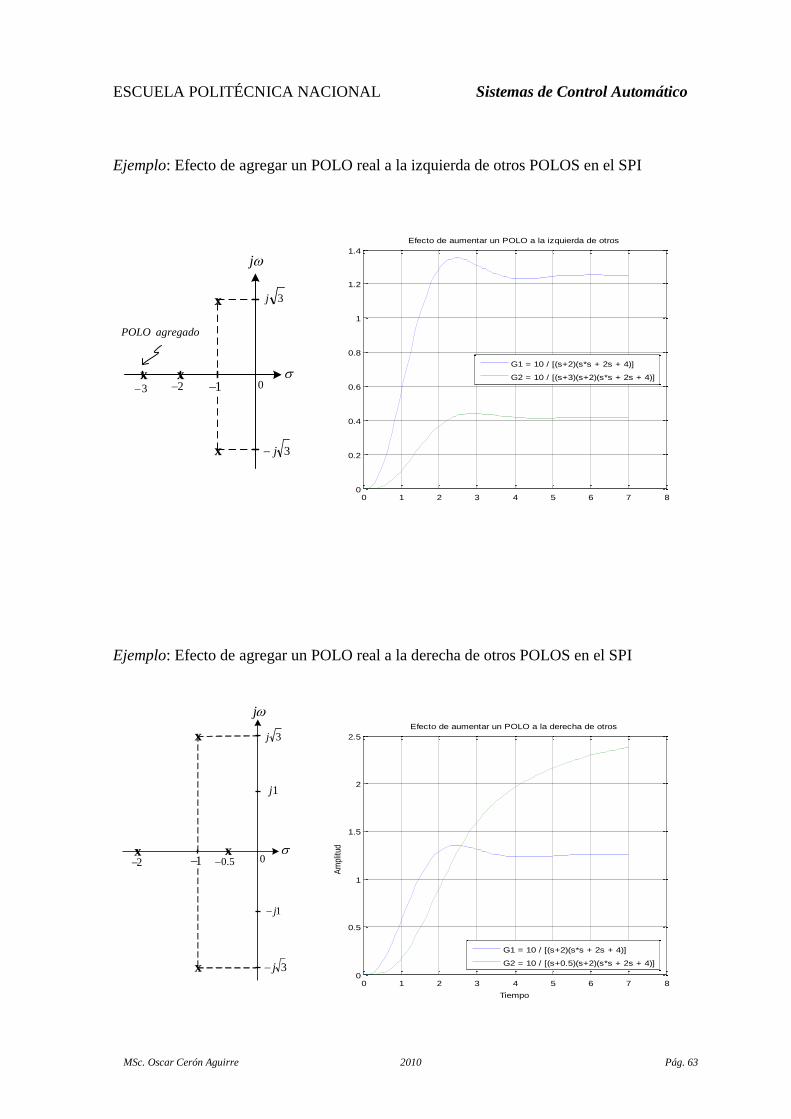
Ejemplo: Efecto de mover un POLO real hacia la derecha de POLOS complejos en el SPI
4
x x3
j
1j
12
x
x
0
1j
5
Ejemplo: Efecto de un CERO ubicado a la derecha de POLOS complejos en el SPI
o
j
1j
1
x
x
0
1j
3j
3j
5.0
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 62
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tiempo
Am
pitu
d
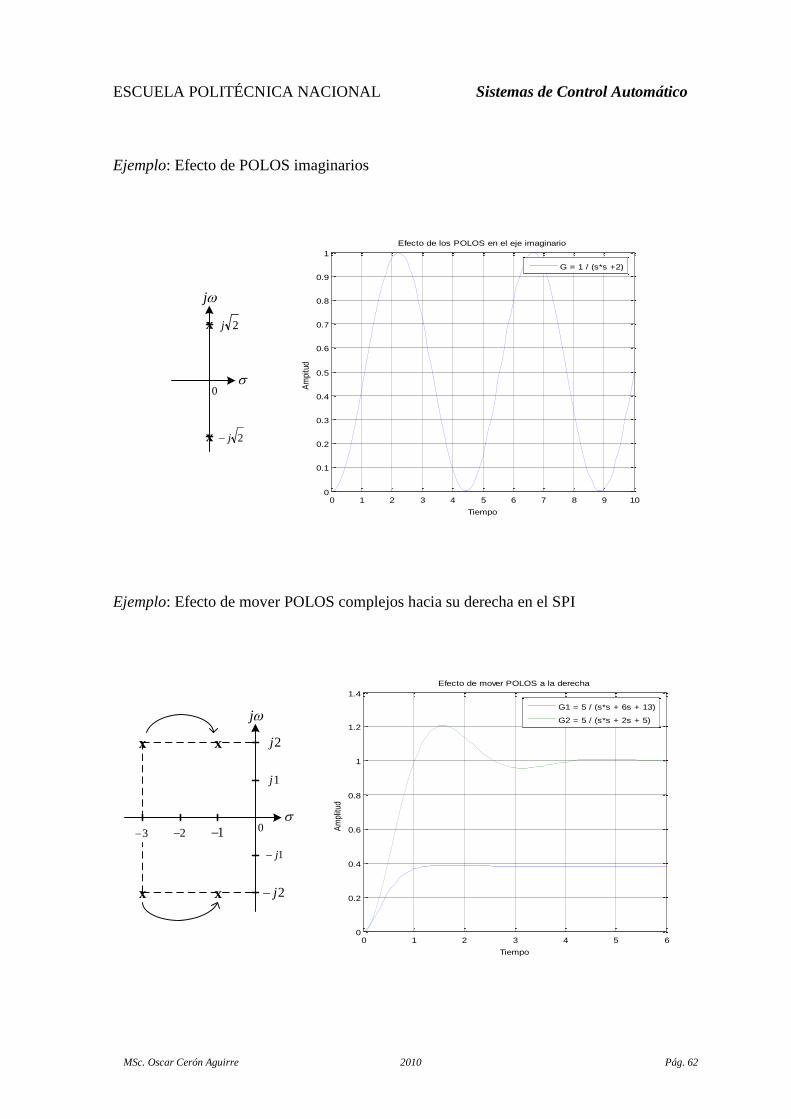
Efecto de los POLOS en el eje imaginario
G = 1 / (s*s +2)
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo
Am
plitu
d
Efecto de mover POLOS a la derecha
G1 = 5 / (s*s + 6s + 13)
G2 = 5 / (s*s + 2s + 5)
Ejemplo: Efecto de POLOS imaginarios
x
j
x
0
2j
2j
Ejemplo: Efecto de mover POLOS complejos hacia su derecha en el SPI
3
j
1j
2j
2j
12
x
x
0
1j
x
x
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 63
0 1 2 3 4 5 6 7 80
0.5
1
1.5
2
2.5
Efecto de aumentar un POLO a la derecha de otros
Tiempo
Am
plitu
d
G1 = 10 / [(s+2)(s*s + 2s + 4)]
G2 = 10 / [(s+0.5)(s+2)(s*s + 2s + 4)]
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
1.2
1.4
Efecto de aumentar un POLO a la izquierda de otros
G1 = 10 / [(s+2)(s*s + 2s + 4)]
G2 = 10 / [(s+3)(s+2)(s*s + 2s + 4)]
Ejemplo: Efecto de agregar un POLO real a la izquierda de otros POLOS en el SPI
j
1
x
x
0
3j
3j
2x
x
3
agregadoPOLO
Ejemplo: Efecto de agregar un POLO real a la derecha de otros POLOS en el SPI
j
1j
1
x
x
0
1j
3j
3j
5.02x x

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 64
0 1 2 3 4 5 60
0.5
1
1.5
2
2.5
Tiempo
Am
plitu
d
Efecto de aumentar un CERO a la izquierda de POLOS
G1 = 5 / (s*s + 2s + 5)
G2 = 5(s+1.5) / (s*s +2s + 5)
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Tiempo
Am
plitu
d
Efecto de aumentar un CERO a la derecha de POLOS
G1 = 5 / (s*s + 2s + 5)
G2 = 5(s+0.5) / (s*s + 2s + 5)
Ejemplo: Efecto de agregar un CERO real a la izquierda de POLOS complejos en el SPI
j
1j
2j
2j
12
x
x
0
1j
o
agregado
CERO
Ejemplo: Efecto de agregar un CERO real a la derecha de POLOS complejos en el SPI
j
1j
2j
2j
12
x
x
0
1j
o
agregado
CERO
Conclusión: Añadir POLOS implica un deterioro de la respuesta transitoria (pueden
provocar inestabilidad)
Para mejorar la respuesta transitoria se añaden CEROS en el SPI.

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 65
LUGAR GEOMÉTRICO DE RAÍCES (LGR)
Se trata de una técnica para el Análisis de Respuesta Transitoria, Estabilidad y Diseño de
Compensadores. Se emplea para la ubicación de POLOS y CEROS, tanto en lazo abierto
como en lazo cerrado cuando uno de los parámetros del Sistema es variable.
Generalmente la ganancia K es el parámetro variable del Sistema.
)(
)(1
)(
)()(1
)(
)(
)(
sD
sNK
sG
sHsG
sGG
sR
sYLC
Donde: abiertolazoenGanancia
sD
sNKsHsG
)(
)()()(
cerradolazoenPOLOSsHsGsP 0)()(1)(
Entonces: 101)( GHGHsP
Lo que implica que las características del LGR son:
módulodecondiciónGH 1||
fasedecondiciónGH 180
Entonces la construcción del LGR en lazo cerrado se inicia con la información en lazo
abierto.
Ejemplo: Obtener el LGR del Sistema dado por: )2(
ss
KGH , considerando
realimentación unitaria (H = 1)
)2( SS
Kr y
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 66
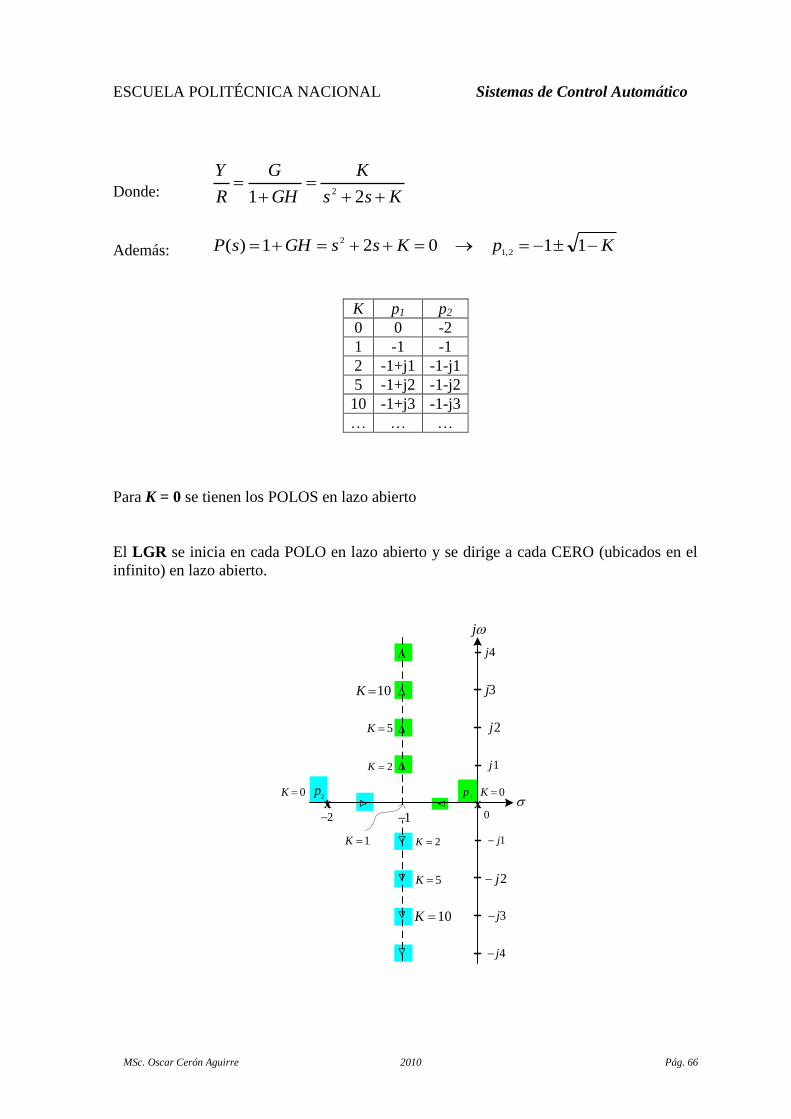
Donde: Kss
K
GH
G
R
Y
21 2
Además: KpKssGHsP 11021)(2,1
2
K p1 p2
0 0 -2
1 -1 -1
2 -1+j1 -1-j1
5 -1+j2 -1-j2
10 -1+j3 -1-j3
… … …
Para K = 0 se tienen los POLOS en lazo abierto
El LGR se inicia en cada POLO en lazo abierto y se dirige a cada CERO (ubicados en el
infinito) en lazo abierto.
1p
2
p
j
1j
1x
0
1j
2
x x
2j
2j
3j
3j
4j
4j
0K 0K
1K 2K
2K
5K
5K
10K
10K
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 67
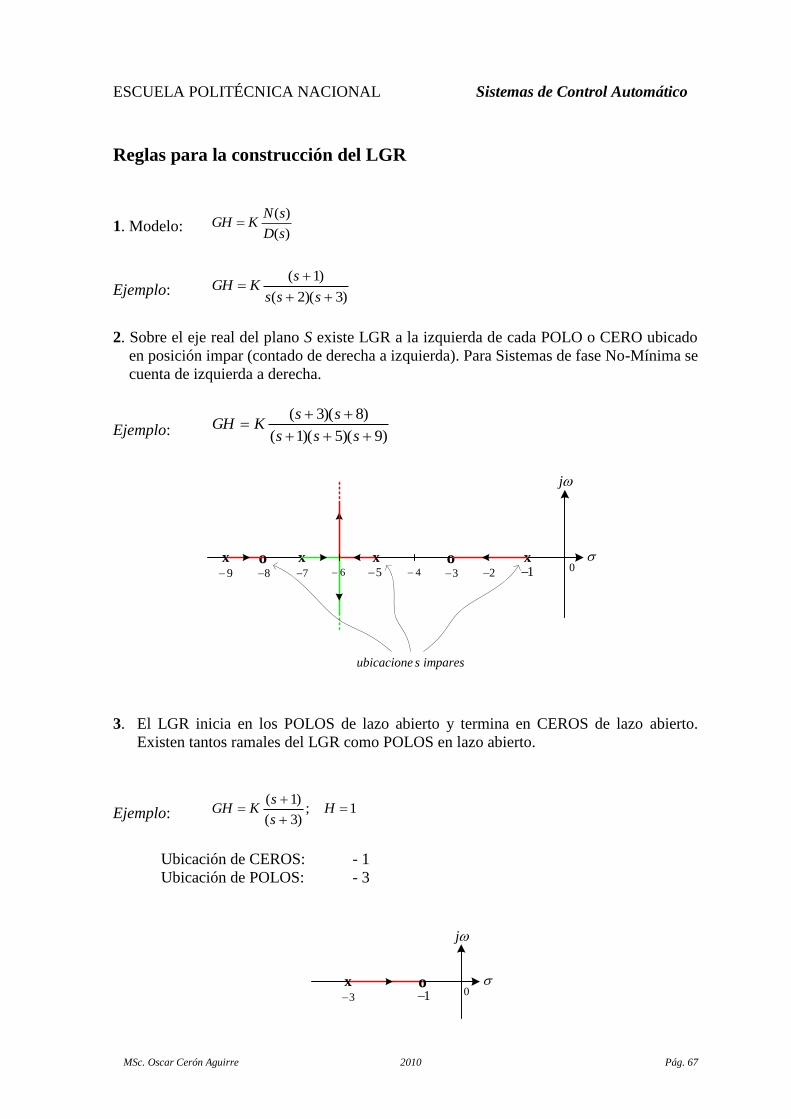
Reglas para la construcción del LGR
1. Modelo: )(
)(
sD
sNKGH
Ejemplo: )3)(2(
)1(
sss
sKGH
2. Sobre el eje real del plano S existe LGR a la izquierda de cada POLO o CERO ubicado
en posición impar (contado de derecha a izquierda). Para Sistemas de fase No-Mínima se
cuenta de izquierda a derecha.
Ejemplo: )9)(5)(1(
)8)(3(
sss
ssKGH
j
xxx oox0123456789
imparessubicacione
3. El LGR inicia en los POLOS de lazo abierto y termina en CEROS de lazo abierto.
Existen tantos ramales del LGR como POLOS en lazo abierto.
Ejemplo: 1;)3(
)1(
H
s
sKGH
Ubicación de CEROS: - 1
Ubicación de POLOS: - 3
ox
j
013
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 68
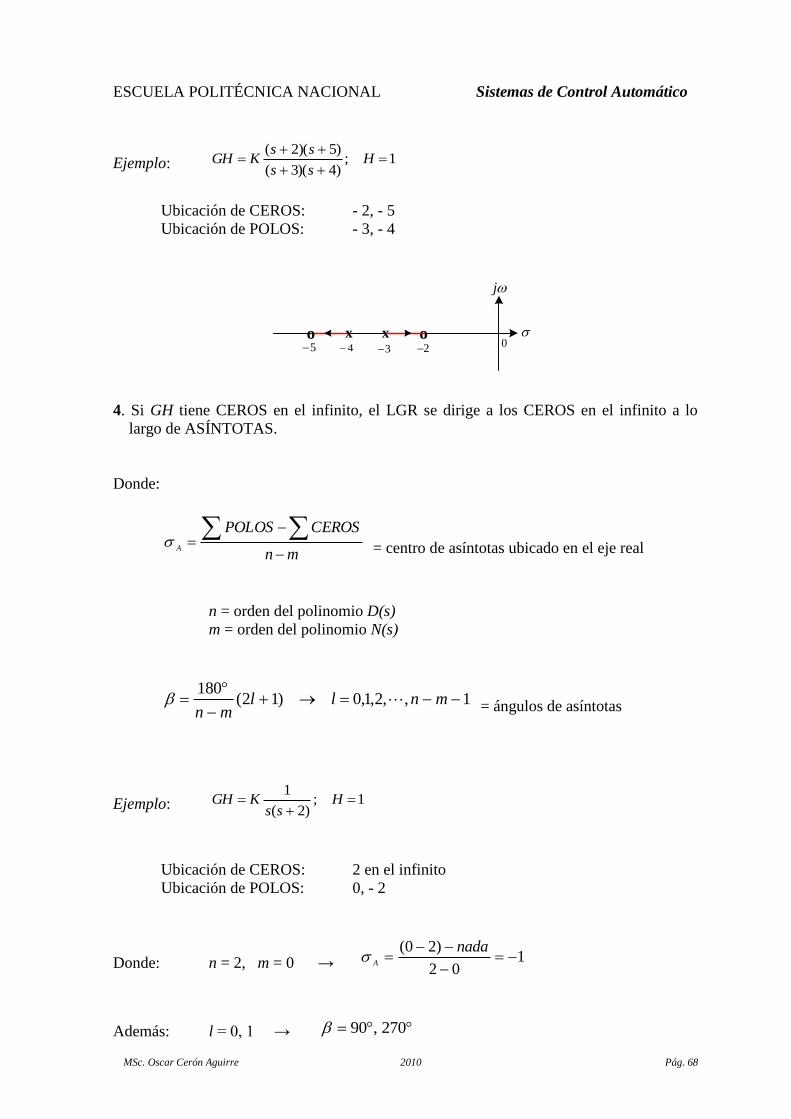
Ejemplo: 1;)4)(3(
)5)(2(
H
ss
ssKGH
Ubicación de CEROS: - 2, - 5
Ubicación de POLOS: - 3, - 4
ox
j
03
o x245
4. Si GH tiene CEROS en el infinito, el LGR se dirige a los CEROS en el infinito a lo
largo de ASÍNTOTAS.
Donde:
mn
CEROSPOLOS
A
= centro de asíntotas ubicado en el eje real
n = orden del polinomio D(s)
m = orden del polinomio N(s)
1,,2,1,0)12(180
mnll
mn = ángulos de asíntotas
Ejemplo: 1;)2(
1
H
ssKGH
Ubicación de CEROS: 2 en el infinito
Ubicación de POLOS: 0, - 2
Donde: n = 2, m = 0 → 102
)20(
nadaA
Además: l = 0, 1 → 270,90

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 69
j
1
x02
x x
270
A 90
5. Punto de partida o llegada desde el eje real B : 00)(
ds
dKsP
Para el ejemplo anterior se tiene:
)2(0)2(01 2 ssKKssGH
Donde: Bss
ds
dK 10)22(
Ejemplo: 1;)4)(2(
Hsss
KGH
Ubicación de CEROS: 3 en el infinito
Ubicación de POLOS: 0, - 2, - 4
Donde:
n = 3, m = 0 → 203
)420(
nadaA
300,180,602,1,0)12(
180 ll
mn
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
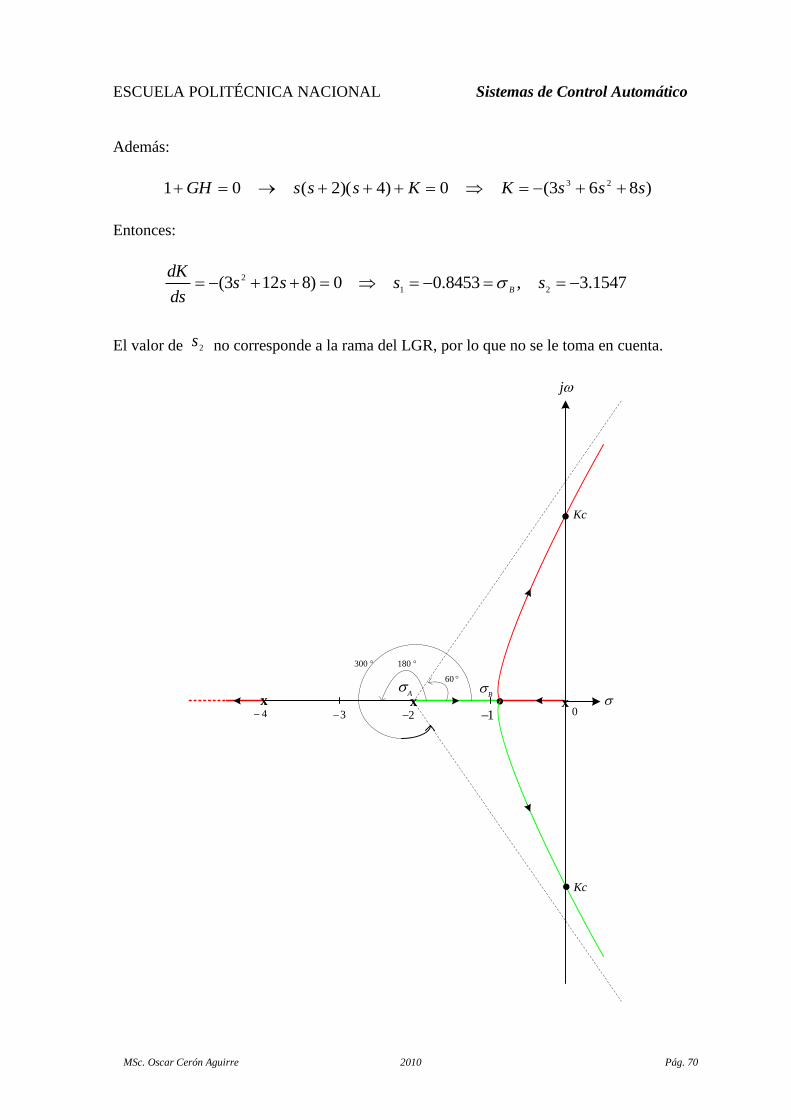
MSc. Oscar Cerón Aguirre 2010 Pág. 70
Además:
)863(0)4)(2(01 23 sssKKsssGH
Entonces:
1547.3,8453.00)8123(
21
2 ssssds
dKB
El valor de 2s no corresponde a la rama del LGR, por lo que no se le toma en cuenta.
xx x0
j
4 3 2 1
A
B
Kc
Kc
60
180300

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 71
6. Determinación del rango de K para estabilidad absoluta
Ejemplo: 1;)4)(2(
Hsss
KGH
Donde:
0860)4)(2(01 23 KsssKsssGH
De acuerdo al criterio de Routh - Hurwitz (en base a coeficientes del polinomio
característico), se tiene:
3S 1 8
2S 6 K
1S 1a 0
0S K
Donde: 4806
48
6
1861
KKK
a
También: 0K
Entonces: 480 K
El límite superior de K corresponde al K crítico (Kc), donde: 48Kc
7. Corte con el eje imaginario: Routh - Hurwitz
Para saber a que valores de S el LGR corta al eje imaginario del plano S, se elige el valor
de Kc a través de una ecuación auxiliar de segundo orden, la misma que se construye con
los coeficientes de la fila 2S del arreglo de Routh, así:
2,12,1
22 8048606 pjSSKSc
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 72
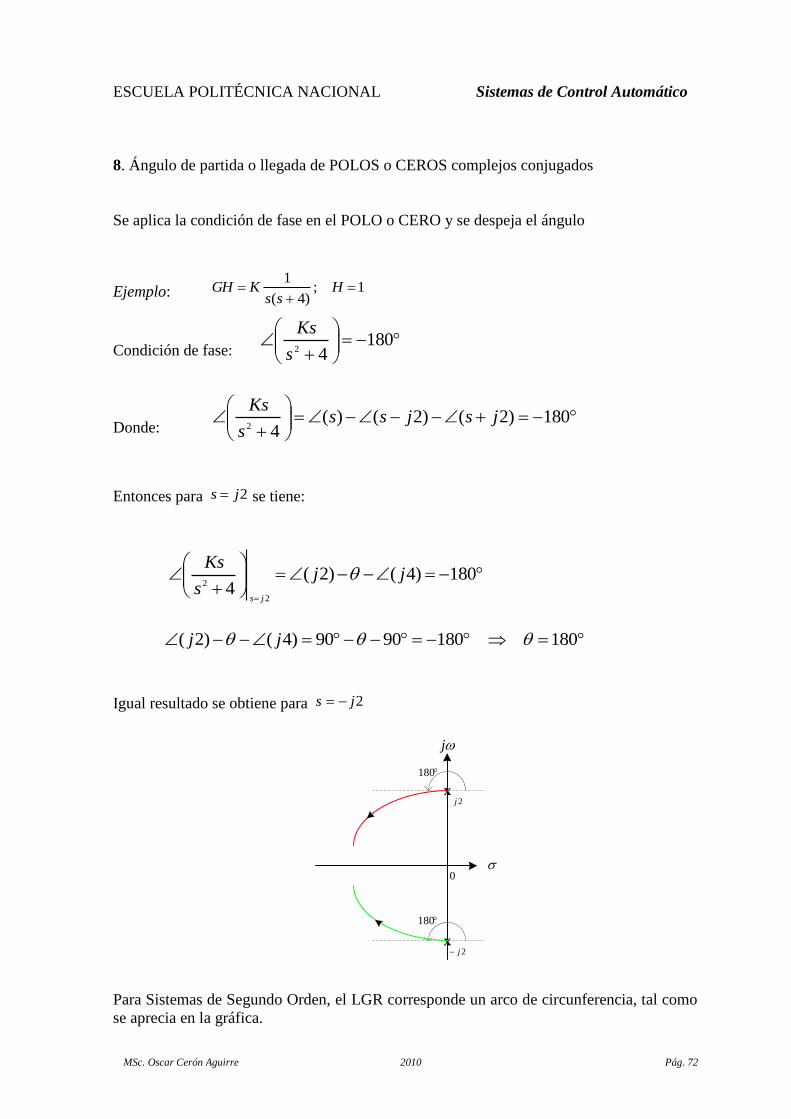
8. Ángulo de partida o llegada de POLOS o CEROS complejos conjugados
Se aplica la condición de fase en el POLO o CERO y se despeja el ángulo
Ejemplo: 1;)4(
1
H
ssKGH
Condición de fase:
180
42s
Ks
Donde:
180)2()2()(
42jsjss
s
Ks
Entonces para 2js se tiene:
180)4()2(4
2
2jj
s
Ks
js
1801809090)4()2( jj
Igual resultado se obtiene para 2js
j
0
x
x
180
180
2j
2j
Para Sistemas de Segundo Orden, el LGR corresponde un arco de circunferencia, tal como
se aprecia en la gráfica.

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 73
9. Modelo que no cumple con el formato )(
)(
sD
sNKGH
Ejemplo: 1;)(
4
H
pssGH
Este modelo no cumple con el formato para el LGR, esto es: )(
)(
sD
sNKGH , por lo que es
necesario transformarlo, esto es:
0)4(0401 22 spsspsGH
Donde: 01
40
)4(
)4(22
2
GH
s
sp
s
sps
Entonces: 42
s
spGH ya es un modelo que cumple con el formato del LGR.
Nota: Cabe recalcar que esta transformación solo es posible para dibujar el LGR y no para
otro objetivo.
Por lo tanto:
Ubicación de CEROS: 0,
Ubicación de POLOS: + j2, - j2
Donde:
n = 2, m = 1 → 012
)0()22(
jjA
1800)12(
180 ll
mn
Además:
s
sp
s
spGH
40
4101
2
2

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 74
Entonces:
2,20
4212
2
sss
s
ds
dpB
El valor de 2s no corresponde a la rama del LGR, por lo que no se le toma en cuenta.
También los ángulos de partida desde los POLOS están dados por: 180 (ejemplo
anterior)
j
x
02
x
o4
2j
2j
B
A
180
Conclusión: El tipo de transitorio lo determinan los POLOS y éstos desplazan al LGR
hacia la derecha, mientras que los CEROS lo desplazan al LGR hacia la
izquierda (mejoran el transitorio)
Ejemplo: obtener, con el mayor detalle, todas las características para construir el LGR del
Sistema dado por
R Y
Ks1
)2)(1(
1
sss
Donde: )2)(1(
1
sss
KsGH

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 75
Puesto que no se tiene el modelo apropiado para el LGR, esto es )(
)(
sD
sNKGH , entonces:
023
11
)2)(1(
111
23
sss
Ks
sss
KsGH
En el numerador se tiene: Kssss 123 23
, para lo cual se hace lo siguiente
0123123
1231
2323
23
sss
Ks
sss
sssGH
Donde: 123 23
sss
KsGH
, este ya es un modelo apropiado para el LGR
Entonces:
Ubicación de CEROS: 0, ,
Ubicación de POLOS: - 2.32, - 0.34 + j0.56, - 0.34 – j0.56
n = 3, m = 1 → 5.12
3
13
0)34.034.032.2(
A
l = 0, 1 → 270,90
Además: s
sssK
sss
sKGH
1230
12311
23
23
Donde:
5.0,10)1)(5.0(132
32,1
223 ssssssds
dKB
Como se puede apreciar, existen dos puntos de partida. El valor de 3s no corresponde a la
rama del LGR, por lo que no se le toma en cuenta.
Por otro lado, el ángulo de partida desde los POLOS complejos conjugados, vendrá dado
por:
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 76
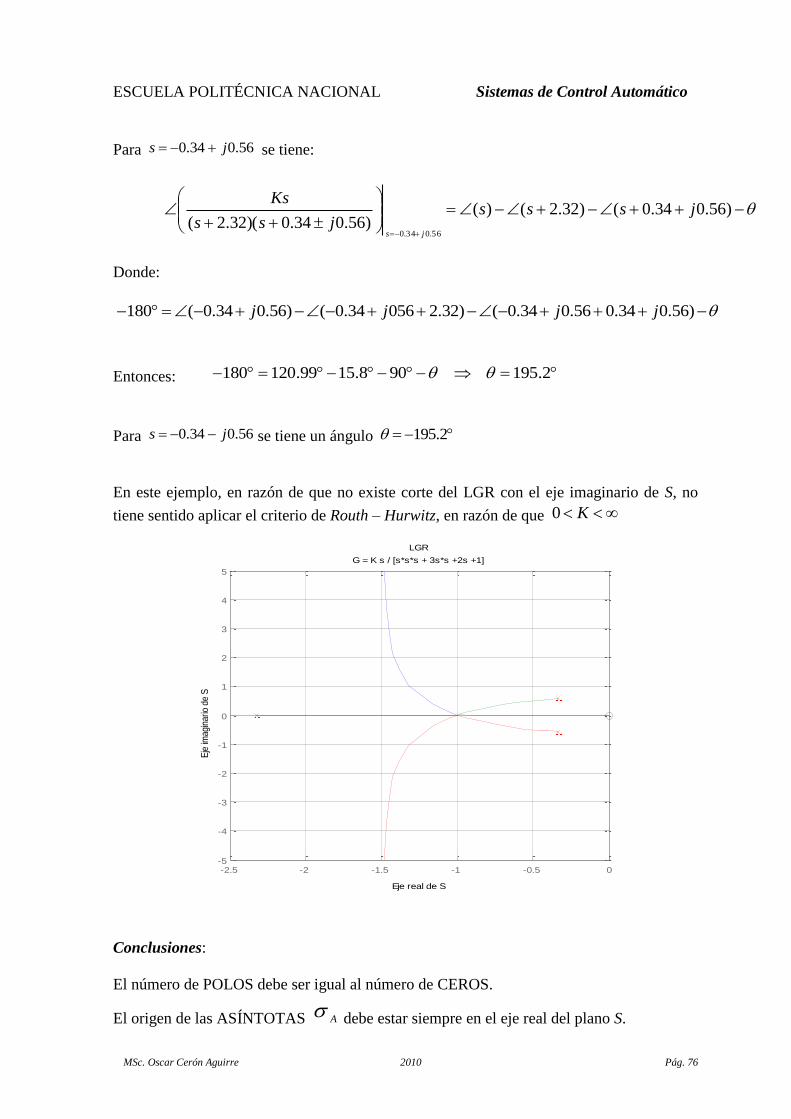
Para 56.034.0 js se tiene:
)56.034.0()32.2()()56.034.0)(32.2(
56.034.0
jsssjss
Ks
js
Donde:
)56.034.056.034.0()32.205634.0()56.034.0(180 jjjj
Entonces: 2.195908.1599.120180
Para 56.034.0 js se tiene un ángulo 2.195
En este ejemplo, en razón de que no existe corte del LGR con el eje imaginario de S, no
tiene sentido aplicar el criterio de Routh – Hurwitz, en razón de que K0
-2.5 -2 -1.5 -1 -0.5 0-5
-4
-3
-2
-1
0
1
2
3
4
5
LGR
G = K s / [s*s*s + 3s*s +2s +1]
Eje real de S
Eje
imag
inar
io d
e S
Conclusiones:
El número de POLOS debe ser igual al número de CEROS.
El origen de las ASÍNTOTAS A debe estar siempre en el eje real del plano S.
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 77
Los puntos de partida o llegada B debe corresponder solo al eje real del plano S, de lo
contrario se los descarta.
Si no existen CEROS en el infinito, no existen ASÍNTOTAS.
Donde existe doble POLO real corresponde a un punto de partida.
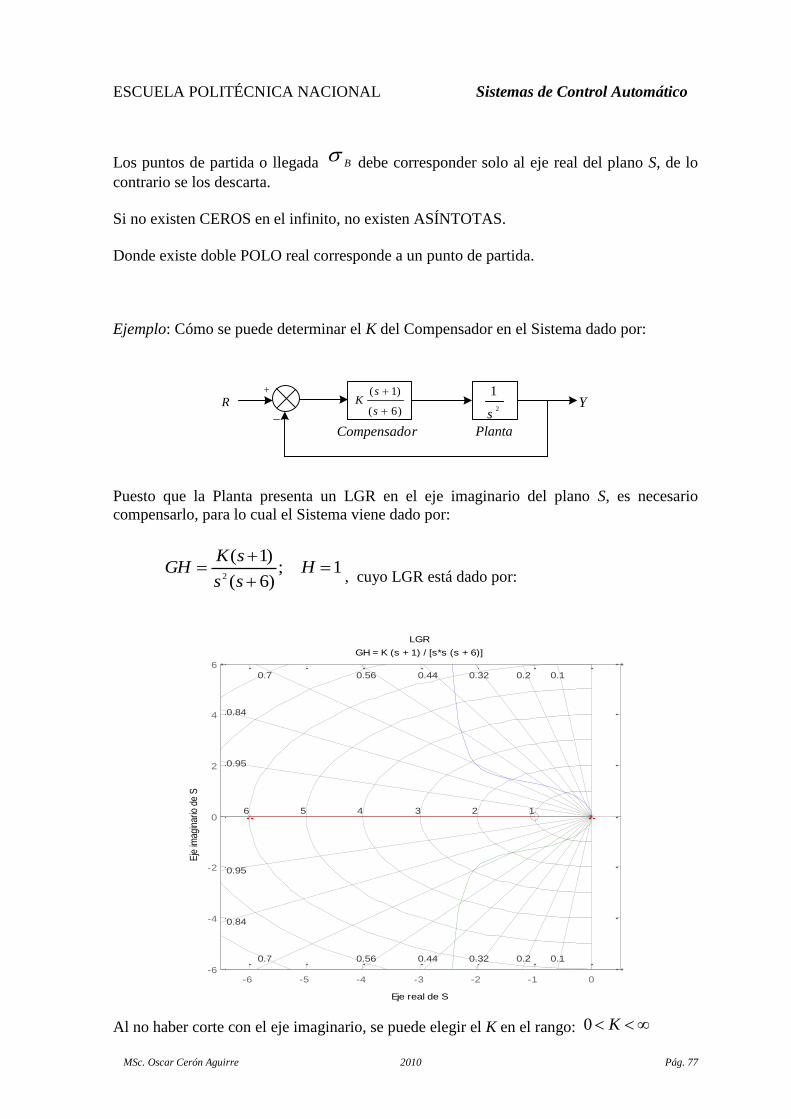
Ejemplo: Cómo se puede determinar el K del Compensador en el Sistema dado por:
2
1
sR Y
rCompensado Planta
)6(
)1(
s
sK
Puesto que la Planta presenta un LGR en el eje imaginario del plano S, es necesario
compensarlo, para lo cual el Sistema viene dado por:
1;)6(
)1(2
H
ss
sKGH
, cuyo LGR está dado por:
-6 -5 -4 -3 -2 -1 0-6
-4
-2
0
2
4
6
0.10.20.320.440.560.7
0.84
0.95
0.10.20.320.440.560.7
0.84
0.95
123456
LGR
GH = K (s + 1) / [s*s (s + 6)]
Eje real de S
Eje
imag
inar
io d
e S
Al no haber corte con el eje imaginario, se puede elegir el K en el rango: K0
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 78
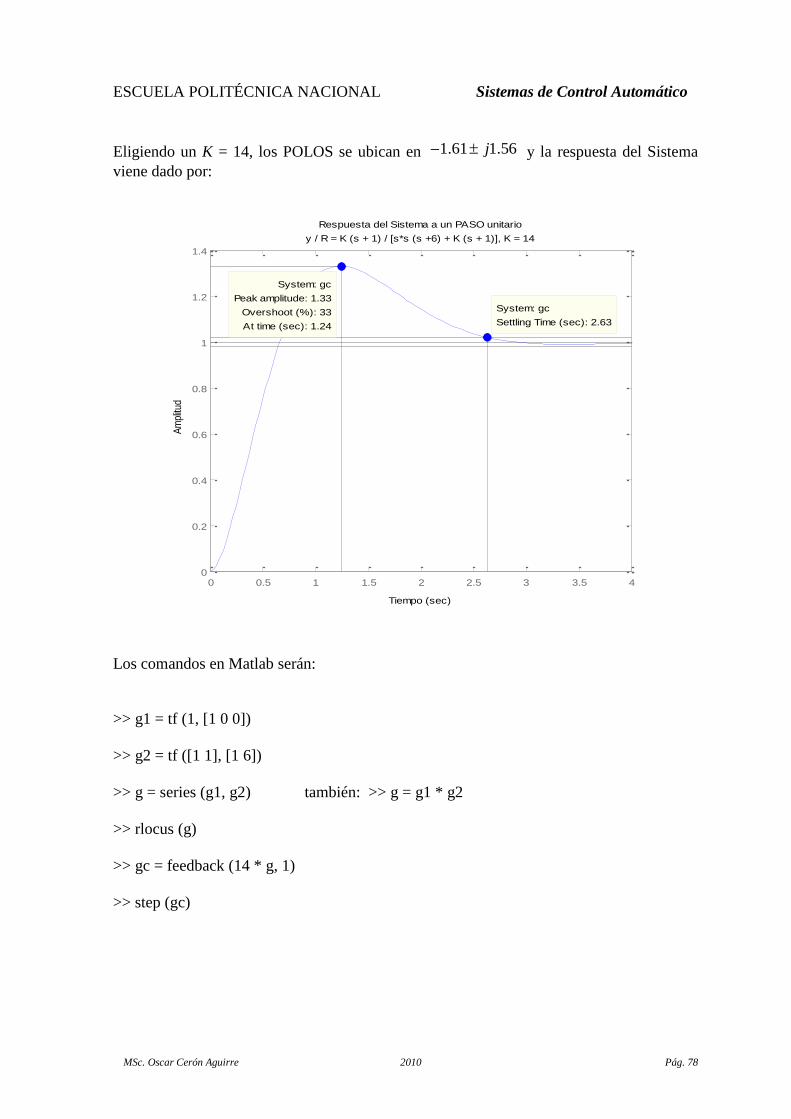
Eligiendo un K = 14, los POLOS se ubican en 56.161.1 j y la respuesta del Sistema
viene dado por:
Respuesta del Sistema a un PASO unitario
y / R = K (s + 1) / [s*s (s +6) + K (s + 1)], K = 14
Tiempo (sec)
Am
plitu
d
0 0.5 1 1.5 2 2.5 3 3.5 40
0.2
0.4
0.6
0.8
1
1.2
1.4
System: gc
Settling Time (sec): 2.63
System: gc
Peak amplitude: 1.33
Overshoot (%): 33
At time (sec): 1.24
Los comandos en Matlab serán:
>> g1 = tf (1, [1 0 0])
>> g2 = tf ([1 1], [1 6])
>> g = series (g1, g2) también: >> g = g1 * g2
>> rlocus (g)
>> gc = feedback (14 * g, 1)
>> step (gc)
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 79
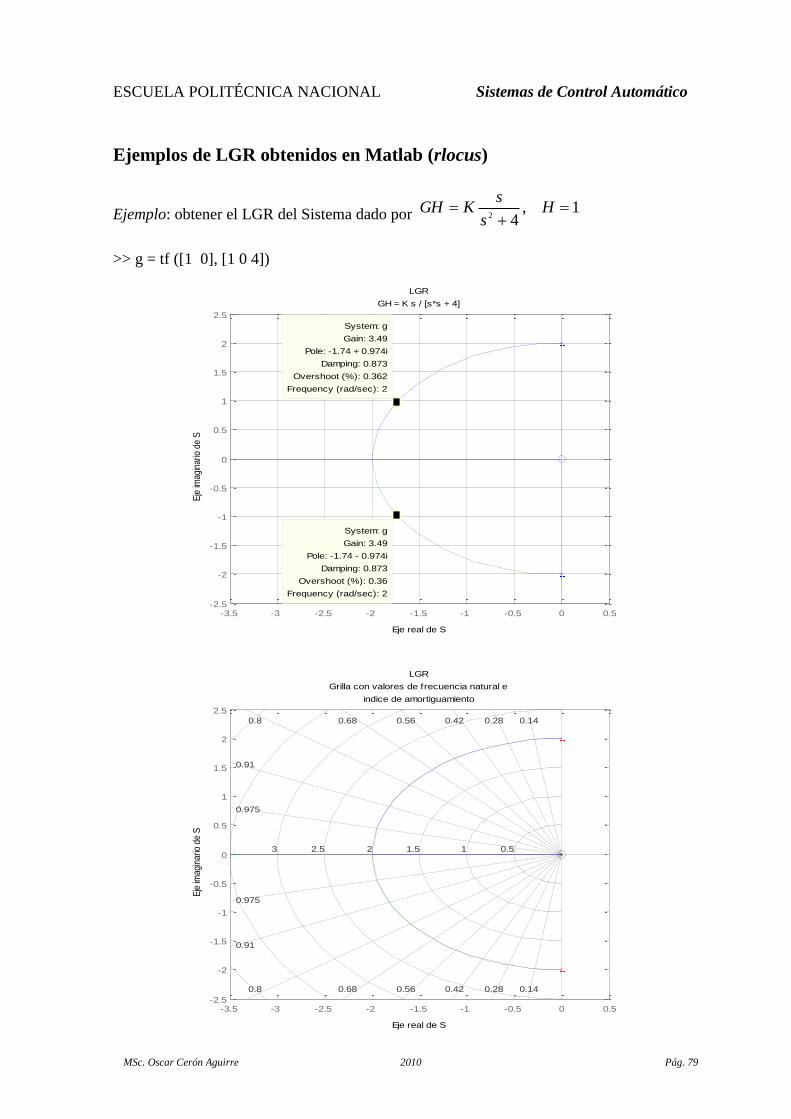
Ejemplos de LGR obtenidos en Matlab (rlocus)
Ejemplo: obtener el LGR del Sistema dado por 1,42
Hs
sKGH
>> g = tf ([1 0], [1 0 4])
LGR
GH = K s / [s*s + 4]
Eje real de S
Eje
imag
inar
io d
e S
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
System: g
Gain: 3.49
Pole: -1.74 - 0.974i
Damping: 0.873
Overshoot (%): 0.36
Frequency (rad/sec): 2
System: g
Gain: 3.49
Pole: -1.74 + 0.974i
Damping: 0.873
Overshoot (%): 0.362
Frequency (rad/sec): 2
LGR
Grilla con valores de frecuencia natural e
indice de amortiguamiento
Eje real de S
Eje
imag
inar
io d
e S
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
0.140.280.420.560.680.8
0.91
0.975
0.140.280.420.560.680.8
0.91
0.975
0.511.522.533.5
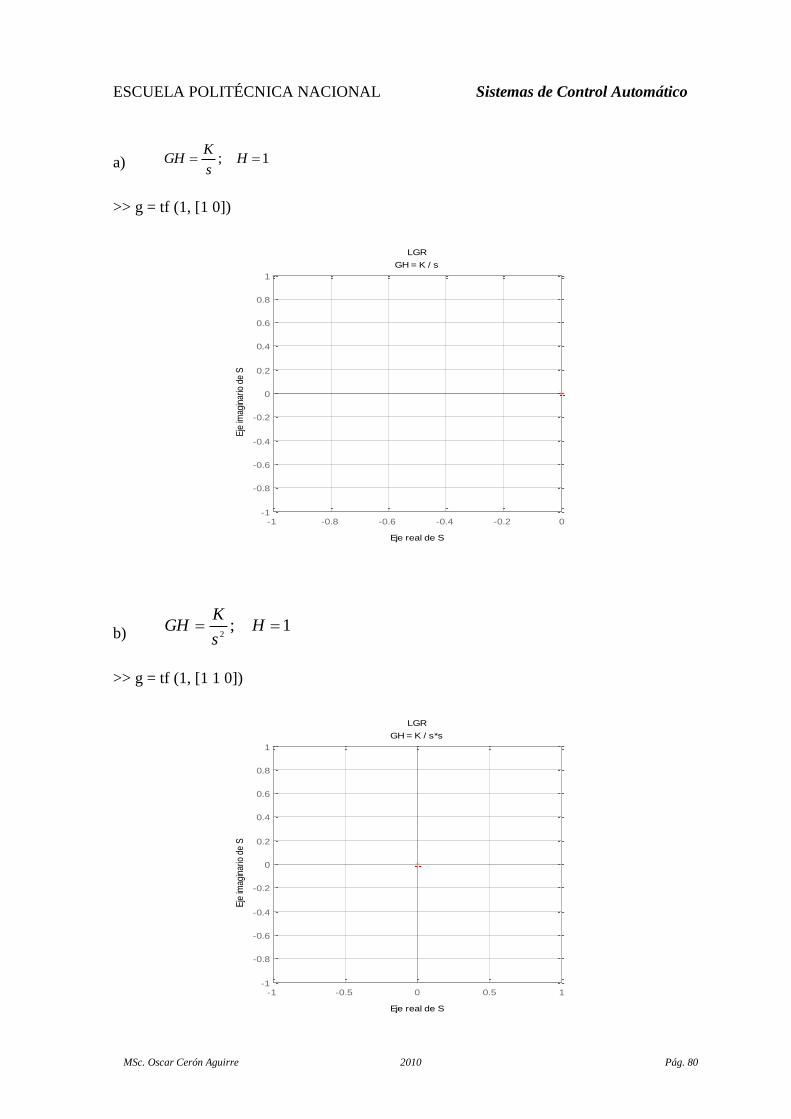
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 80
a) 1; Hs
KGH
>> g = tf (1, [1 0])
-1 -0.8 -0.6 -0.4 -0.2 0-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
LGR
GH = K / s
Eje real de S
Eje
imag
inar
io d
e S
b) 1;
2 H
s
KGH
>> g = tf (1, [1 1 0])
-1 -0.5 0 0.5 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
LGR
GH = K / s*s
Eje real de S
Eje
imag
inar
io d
e S
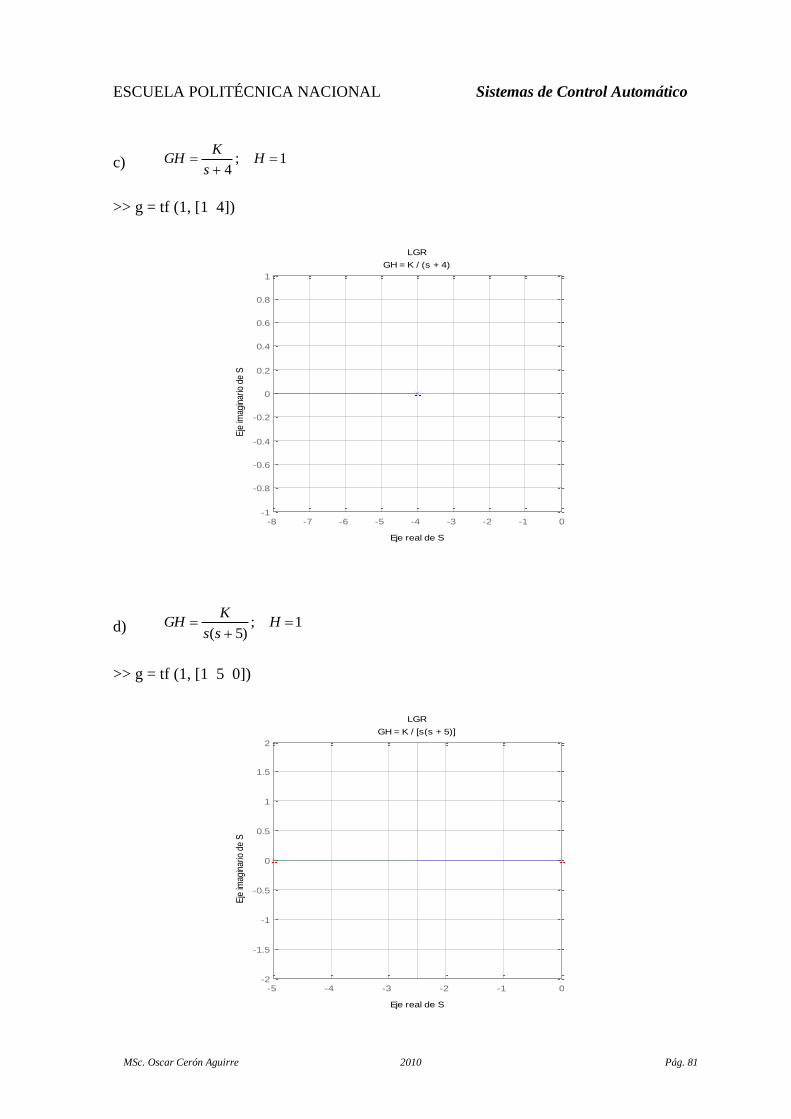
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 81
c) 1;4
Hs
KGH
>> g = tf (1, [1 4])
-8 -7 -6 -5 -4 -3 -2 -1 0-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
LGR
GH = K / (s + 4)
Eje real de S
Eje
imag
inar
io d
e S
d) 1;)5(
Hss
KGH
>> g = tf (1, [1 5 0])
-5 -4 -3 -2 -1 0-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
LGR
GH = K / [s(s + 5)]
Eje real de S
Eje
imag
inar
io d
e S
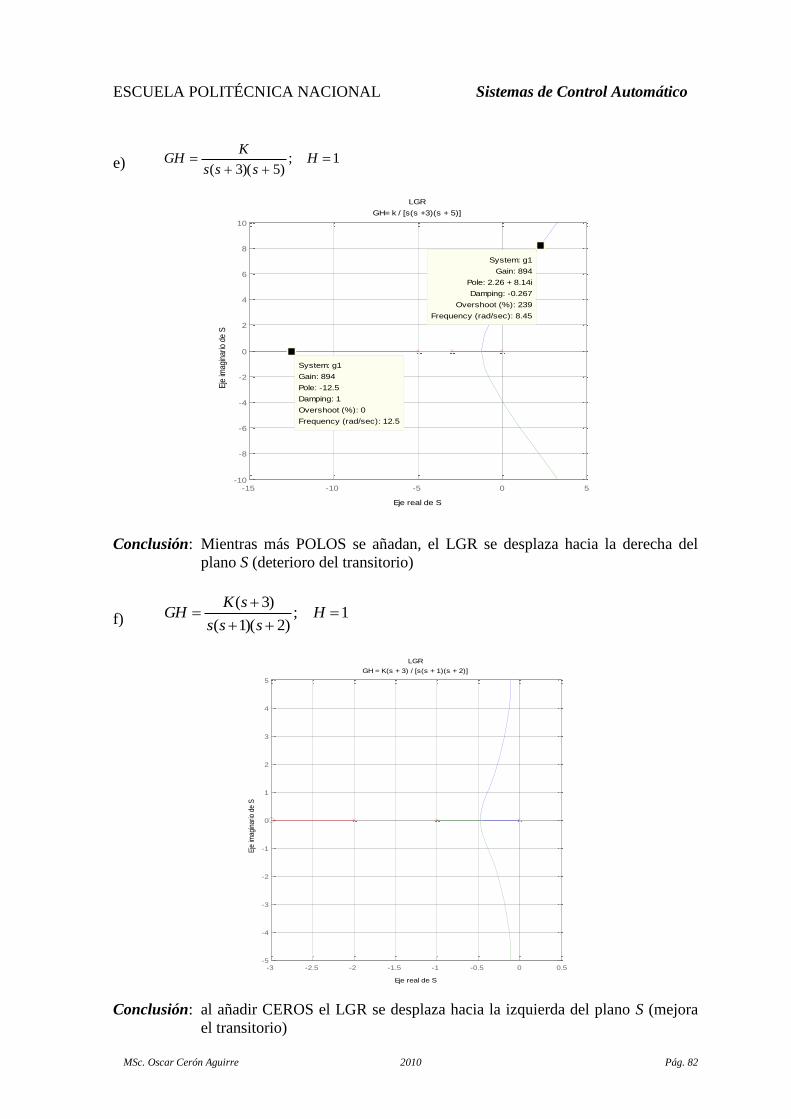
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 82
e) 1;)5)(3(
Hsss
KGH
LGR
GH= k / [s(s +3)(s + 5)]
Eje real de S
Eje
imag
inar
io d
e S
-15 -10 -5 0 5-10
-8
-6
-4
-2
0
2
4
6
8
10
System: g1
Gain: 894
Pole: -12.5
Damping: 1
Overshoot (%): 0
Frequency (rad/sec): 12.5
System: g1
Gain: 894
Pole: 2.26 + 8.14i
Damping: -0.267
Overshoot (%): 239
Frequency (rad/sec): 8.45
Conclusión: Mientras más POLOS se añadan, el LGR se desplaza hacia la derecha del
plano S (deterioro del transitorio)
f) 1;)2)(1(
)3(
H
sss
sKGH
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5-5
-4
-3
-2
-1
0
1
2
3
4
5
LGR
GH = K(s + 3) / [s(s + 1)(s + 2)]
Eje real de S
Eje
imag
inar
io d
e S
Conclusión: al añadir CEROS el LGR se desplaza hacia la izquierda del plano S (mejora
el transitorio)
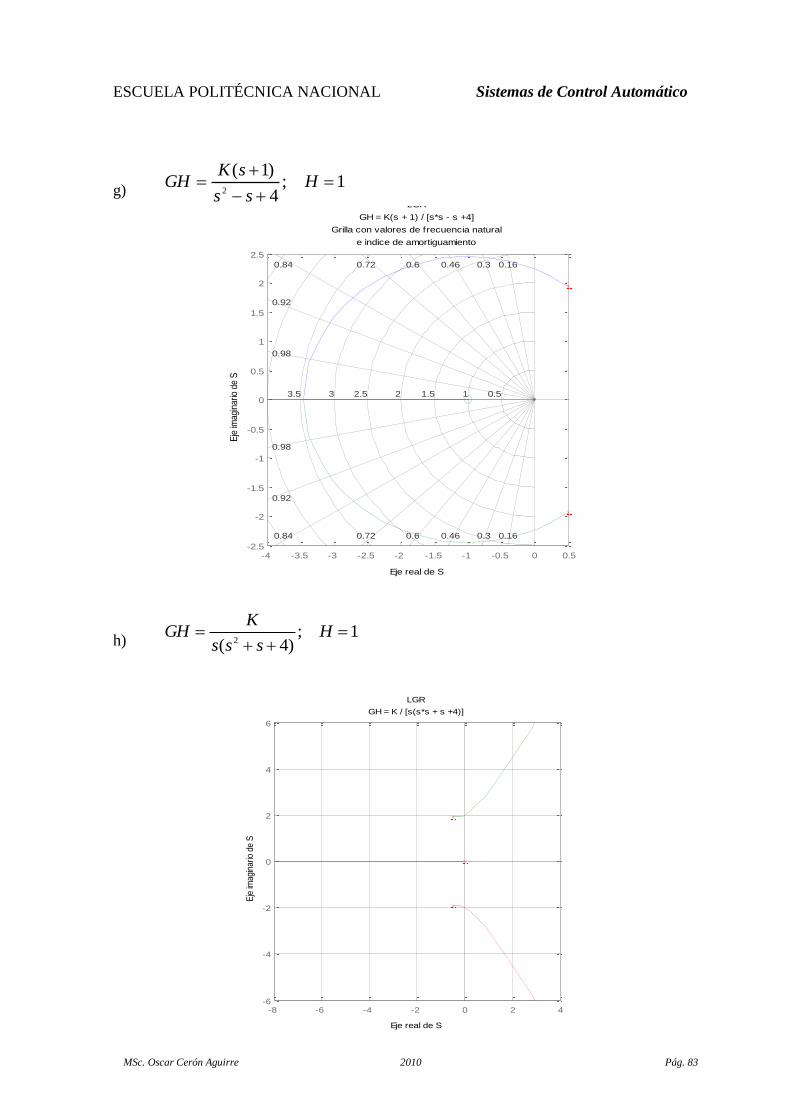
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 83
g) 1;
4
)1(2
H
ss
sKGH
LGR
GH = K(s + 1) / [s*s - s +4]
Grilla con valores de frecuencia natural
e indice de amortiguamiento
Eje real de S
Eje
imag
inar
io d
e S
-4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
0.160.30.460.60.720.84
0.92
0.98
0.160.30.460.60.720.84
0.92
0.98
0.511.522.533.54
h) 1;
)4( 2
H
sss
KGH
-8 -6 -4 -2 0 2 4-6
-4
-2
0
2
4
6
LGR
GH = K / [s(s*s + s +4)]
Eje real de S
Eje
imag
inar
io d
e S
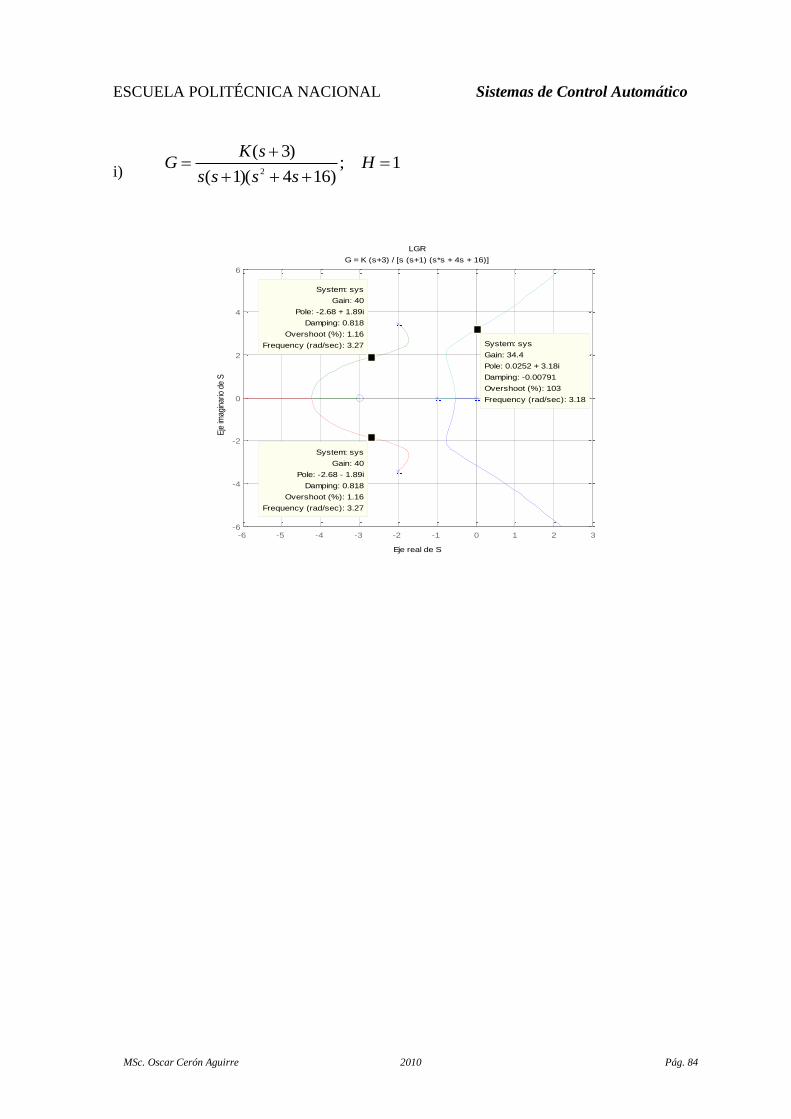
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 84
i) 1;
)164)(1(
)3(2
H
ssss
sKG
LGR
G = K (s+3) / [s (s+1) (s*s + 4s + 16)]
Eje real de S
Eje
imag
inar
io d
e S
-6 -5 -4 -3 -2 -1 0 1 2 3-6
-4
-2
0
2
4
6
System: sys
Gain: 40
Pole: -2.68 + 1.89i
Damping: 0.818
Overshoot (%): 1.16
Frequency (rad/sec): 3.27
System: sys
Gain: 40
Pole: -2.68 - 1.89i
Damping: 0.818
Overshoot (%): 1.16
Frequency (rad/sec): 3.27
System: sys
Gain: 34.4
Pole: 0.0252 + 3.18i
Damping: -0.00791
Overshoot (%): 103
Frequency (rad/sec): 3.18

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 85
ANÁLISIS EN FRECUENCIA
La respuesta es debida a una ENTRADA de frecuencia variable
r ySISTEMA
Donde: )()( tCosRtrmx
→ )()( tCosYtymx
generadordelfrecuencia , 0
fase
- Dominio de la frecuencia real
Considerando el Sistema dado por: )(
)(
)(
)()(
sD
sNK
sR
sYsG
)(
)(
)(
)()(
jR
jY
jD
jNKjGjs = Función de Transferencia Sinusoidal
La Respuesta en Frecuencia es una FUNCIÓN DESCRIPTIVA, que maneja Magnitud y
Fase en función de : jMeM
En Sistemas de Control se maneja un Método Pseudográfico.
Las magnitudes para Sistemas de Potencia están en el orden de: [MW], [KA], [KV]
En Telecomunicaciones (bajas potencias): [mA], [uA], [A], [mV], [uV], [V]
[KHz] (cable coaxial), [MHz] (guías de onda), [GHz] (fibra óptica)
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 86
En Sistemas de Control: Sistema híbrido (sector industrial, instalaciones industriales)
Media potencia: [A], [V] en el orden de las decenas o unidades
- Diagramas de Respuesta en Frecuencia
)}({)}({)(|)(|)()( jGmjjGejGjGjGjssG
BODE:
.)(
.|)(|
vsjG
vsjGdb
NYQUIST: )}({.)}({ jGevsjGm
NICHOLS: )(.|)(| jGvsjGdb
DIAGRAMA DE BODE
Donde: |)(|log20|)(| jGjGdb
Lazo abierto: GM = Margen de Ganancia
FM = Margen de fase
Lazo cerrado: rM = Máximo pico de Resonancia
AB = Ancho de Banda
Factor de Primer Orden (lazo abierto): 1
1)(
1
1)(
jjwGH
ssGH
Donde: = constante de tiempo
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 87
2
1
1
1
1
|1|
1|)(|
cc
jj
jwGH
Entonces:
2
1log20|)(|
c
dbjGH
c
arctgjGH
)(
Asíntotas:
Frecuencias bajas: 1
c
)1log(20|)(| db
jGH = recta de ][0 db
0)( jGH
Frecuencias altas: 1
c
)log(20)log(20log20|)(|c
c
dbjGH
= recta con una pendiente de ]/[20 dcdb
90)( jGH
Frecuencia de corte:
1
c
][0|)(| dbjGHdb
45)( jGH
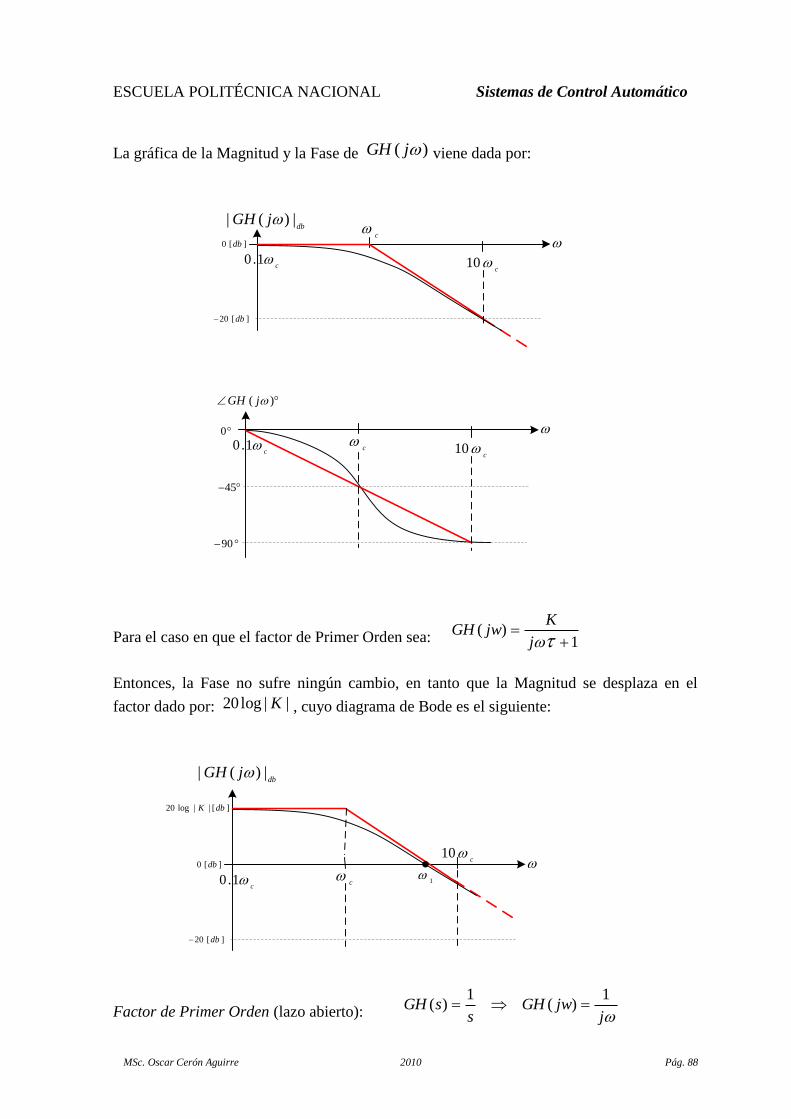
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 88
La gráfica de la Magnitud y la Fase de )( jGH viene dada por:
c1.0
c10
c
][0 db
][20 db
dbjGH |)(|
c1.0
c10c
)( jGH
0
45
90
Para el caso en que el factor de Primer Orden sea: 1)(
jK
jwGH
Entonces, la Fase no sufre ningún cambio, en tanto que la Magnitud se desplaza en el
factor dado por: ||log20 K , cuyo diagrama de Bode es el siguiente:
c1.0
c10
c
][0 db
][20 db
dbjGH |)(|
][||log20 dbK
1
Factor de Primer Orden (lazo abierto): jjwGH
ssGH
1)(
1)(
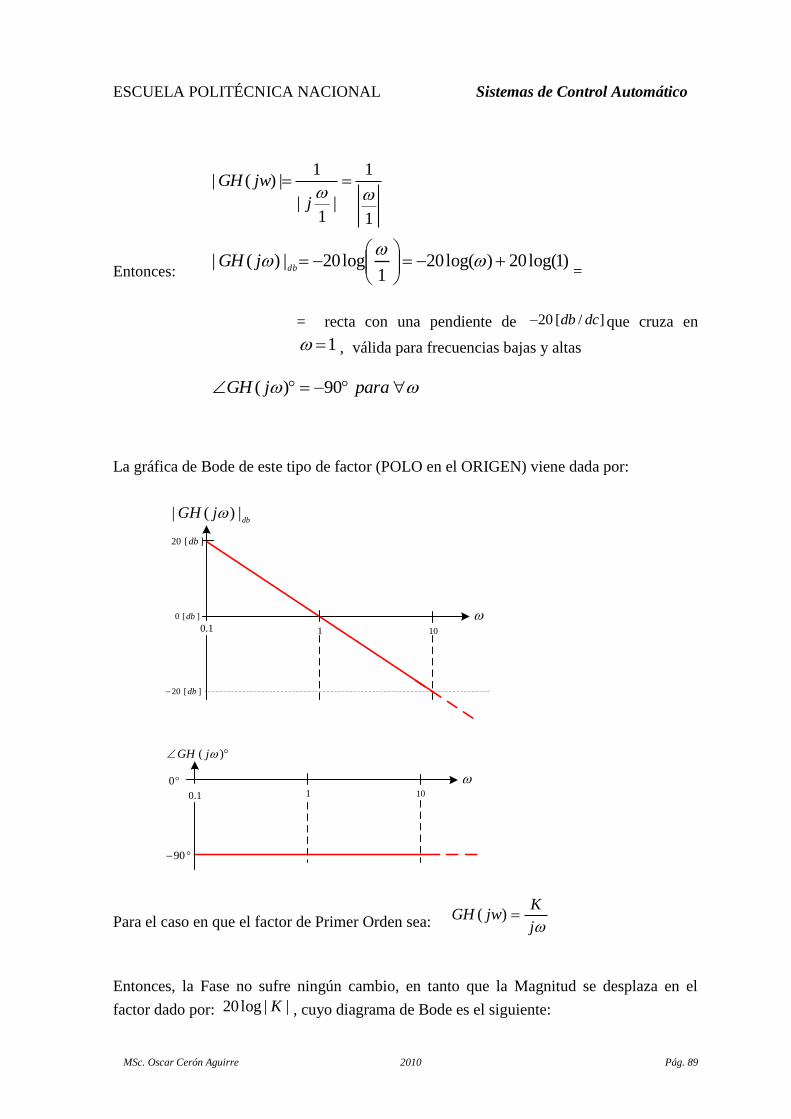
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 89
1
1
|1
|
1|)(|
j
jwGH
Entonces: )1log(20)log(20
1log20|)(|
dbjGH
=
= recta con una pendiente de ]/[20 dcdb que cruza en
1 , válida para frecuencias bajas y altas
parajGH 90)(
La gráfica de Bode de este tipo de factor (POLO en el ORIGEN) viene dada por:
][20 db
][0 db
][20 db
1 101.0
dbjGH |)(|
0
90
1.0 1 10
)( jGH
Para el caso en que el factor de Primer Orden sea: j
KjwGH )(
Entonces, la Fase no sufre ningún cambio, en tanto que la Magnitud se desplaza en el
factor dado por: ||log20 K , cuyo diagrama de Bode es el siguiente:
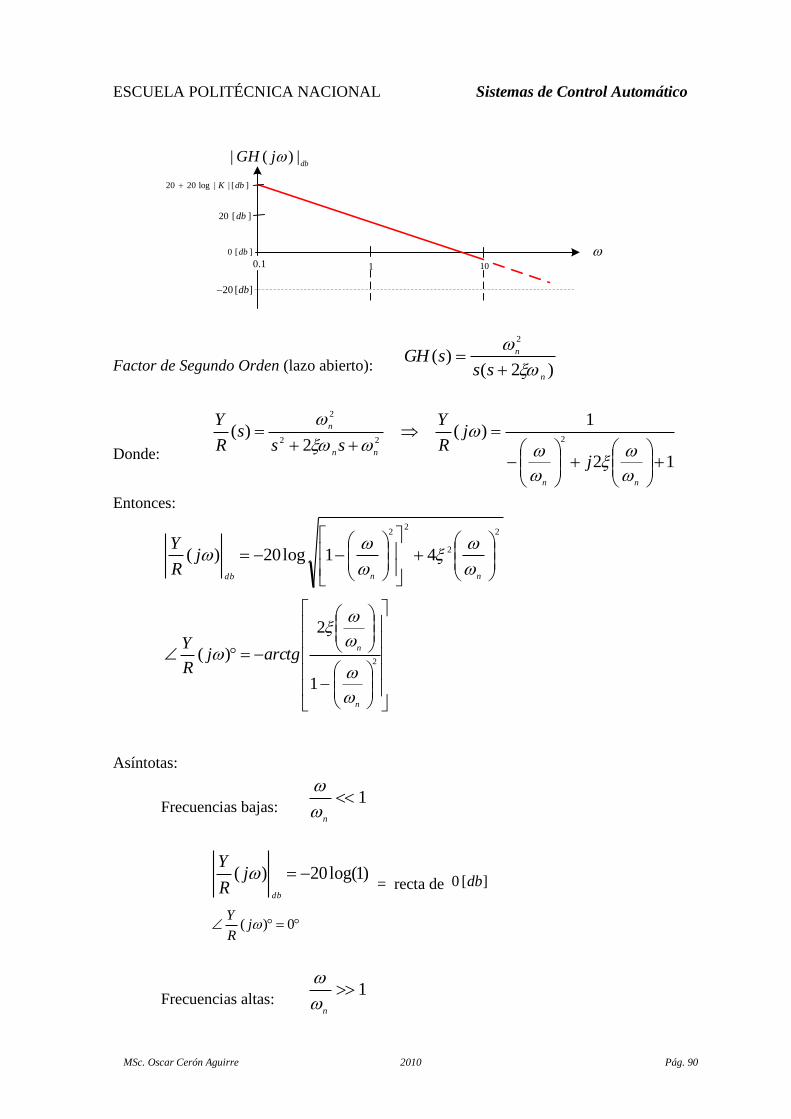
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 90
][0 db
][20 db
1 101.0
dbjGH |)(|
][20 db
][||log2020 dbK
Factor de Segundo Orden (lazo abierto): )2()(
2
n
n
sssGH
Donde: 12
1)(
2)(
222
2
nn
nn
n
j
jR
Y
sss
R
Y
Entonces:
2
2
22
41log20)(
nndb
jR
Y
2
1
2
)(
n
narctgj
R
Y
Asíntotas:
Frecuencias bajas: 1
n
)1log(20)( db
jR
Y
= recta de ][0 db
0)( jR
Y
Frecuencias altas: 1
n
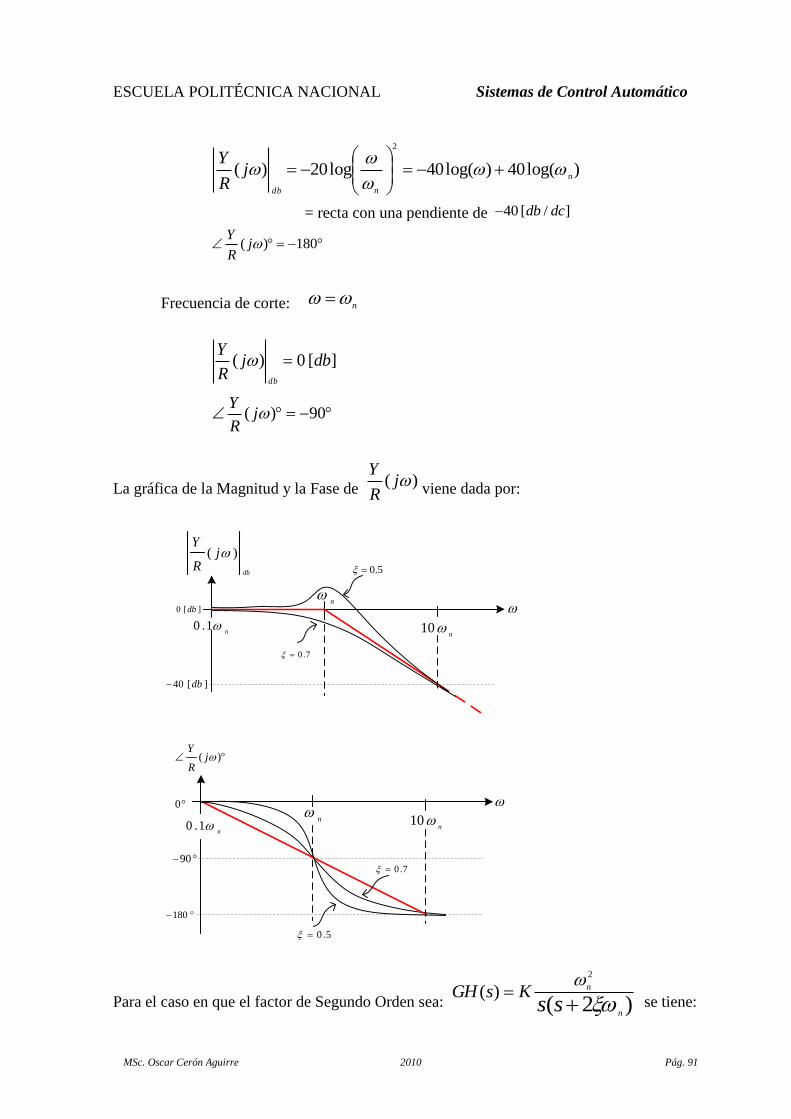
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 91
)log(40)log(40log20)(
2
n
ndb
jR
Y
= recta con una pendiente de ]/[40 dcdb
180)( jR
Y
Frecuencia de corte: n
][0)( dbj
R
Y
db
90)( jR
Y
La gráfica de la Magnitud y la Fase de )( j
R
Yviene dada por:
][0 db
][40 db
n1.0
db
jR
Y)(
n10
n
7.0
5.0
0
90
180
n1.0
n
n10
)( jR
Y
5.0
7.0
Para el caso en que el factor de Segundo Orden sea: )2(
2
)(n
n
ssKsGH
se tiene:

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 92
12
1)(
2)(
222
2
nn
nn
n
j
KjR
Y
ssKs
R
Y
Entonces, la Fase no sufre ningún cambio, en tanto que la Magnitud se desplaza en el
factor dado por: ||log20 K , cuyo diagrama de Bode es el siguiente:
][0 db
][40 db
n1.0
db
jR
Y)(
n10
n
7.0
5.0
][||log20 dbK
Por lo tanto en lazo abierto se definen el Margen de Ganancia GM y el Margen de Fase
FM , esto es:
dbjGH |)(|
)( jGH
0
90
180
1
)(G
M
)(F
M
][0 db
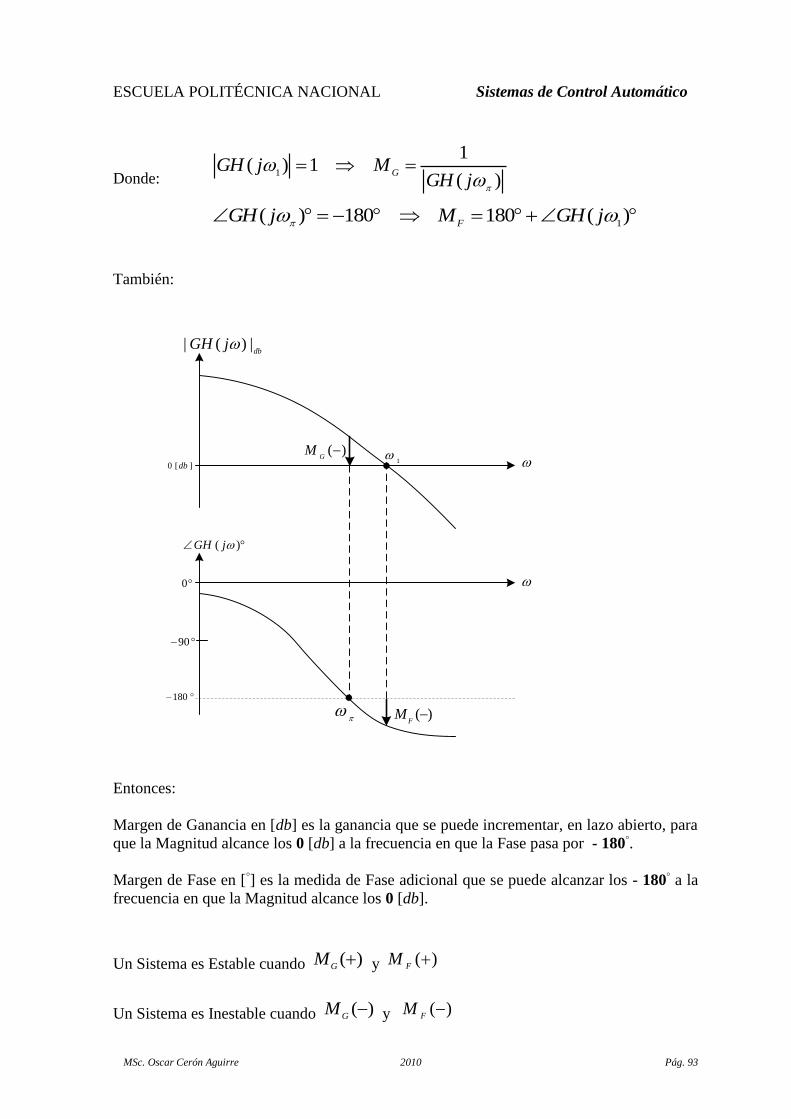
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 93
Donde: )(
11)(
1
jGH
MjGHG
)(180180)(1
jGHMjGHF
También:
dbjGH |)(|
)( jGH
0
90
180
1
][0 db
)(G
M
)(F
M
Entonces:
Margen de Ganancia en [db] es la ganancia que se puede incrementar, en lazo abierto, para
que la Magnitud alcance los 0 [db] a la frecuencia en que la Fase pasa por - 180◦.
Margen de Fase en [◦] es la medida de Fase adicional que se puede alcanzar los - 180
◦ a la
frecuencia en que la Magnitud alcance los 0 [db].
Un Sistema es Estable cuando )(G
M y )(F
M
Un Sistema es Inestable cuando )(G
M y )(F
M

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 94
Para Sistemas de Fase Mínima se tiene: )(G
M y )(F
M o )(G
M y )(F
M
Para Sistemas de Fase No Mínima se tiene: )(G
M y )(F
M o )(G
M y )(F
M
En lazo cerrado se definen el Máximo de Resonancia rM y el Ancho de Banda
AB únicamente en la Magnitud, esto es:
db
jR
Y)(
][0 db
][3 db
rM
r
AB
AB
El Máximo de Resonancia es una medida de las oscilaciones del Sistema y tiene que ver
con la Estabilidad Relativa.
Para obtener el Máximo de Resonancia rM se debe hacer: 0)(
j
R
Y
d
d
Para un Sistema de Segundo Orden, se tiene:
212
1log20
rM
máximo valor que alcanza la Magnitud.
221 nr frecuencia a la cual ocurre el Máximo de Resonancia.
221)( arctgjGH
r Fase a la frecuencia de resonancia r
2421 242 n
AB Ancho de Banda
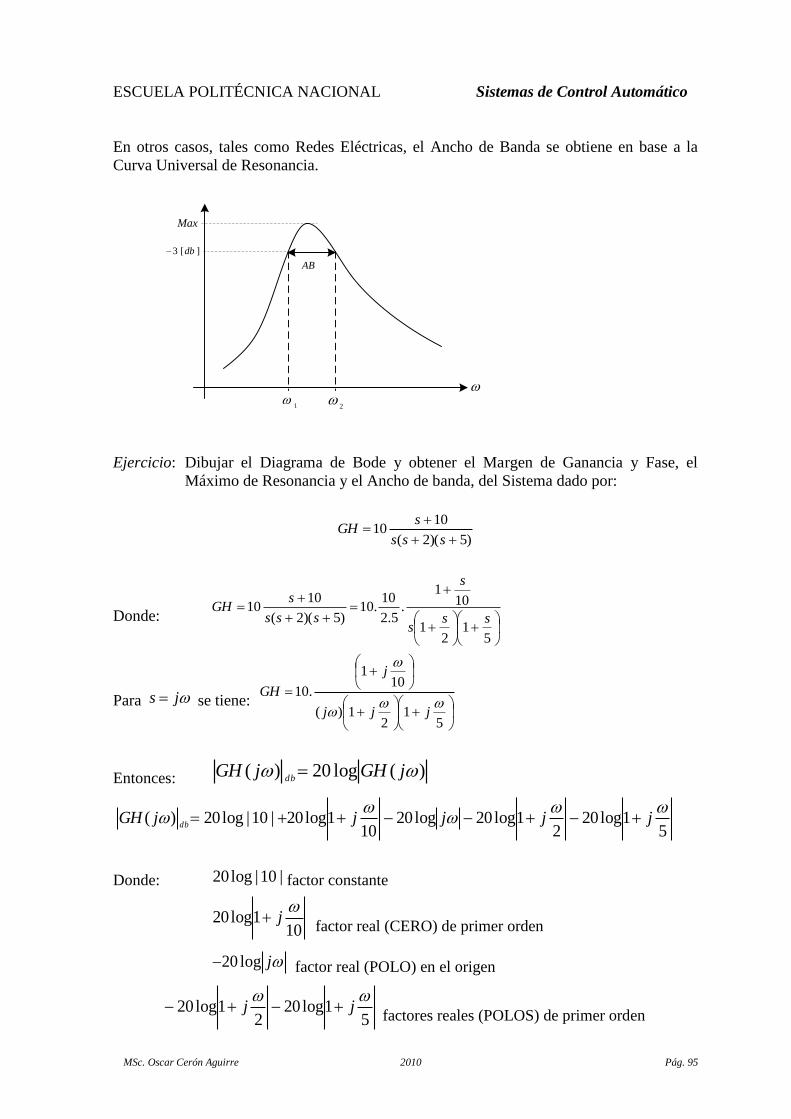
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 95
En otros casos, tales como Redes Eléctricas, el Ancho de Banda se obtiene en base a la
Curva Universal de Resonancia.
][3 db
1
2
AB
Max
Ejercicio: Dibujar el Diagrama de Bode y obtener el Margen de Ganancia y Fase, el
Máximo de Resonancia y el Ancho de banda, del Sistema dado por:
)5)(2(
1010
sss
sGH
Donde:
51
21
101
.5.2
10.10
)5)(2(
1010
sss
s
sss
sGH
Para js se tiene:
51
21)(
101
.10
jjj
j
GH
Entonces: )(log20)( jGHjGHdb
51log20
21log20log20
101log20|10|log20)(
jjjjjGH
db
Donde: |10|log20 factor constante
101log20
j
factor real (CERO) de primer orden
jlog20 factor real (POLO) en el origen
51log20
21log20
jj
factores reales (POLOS) de primer orden
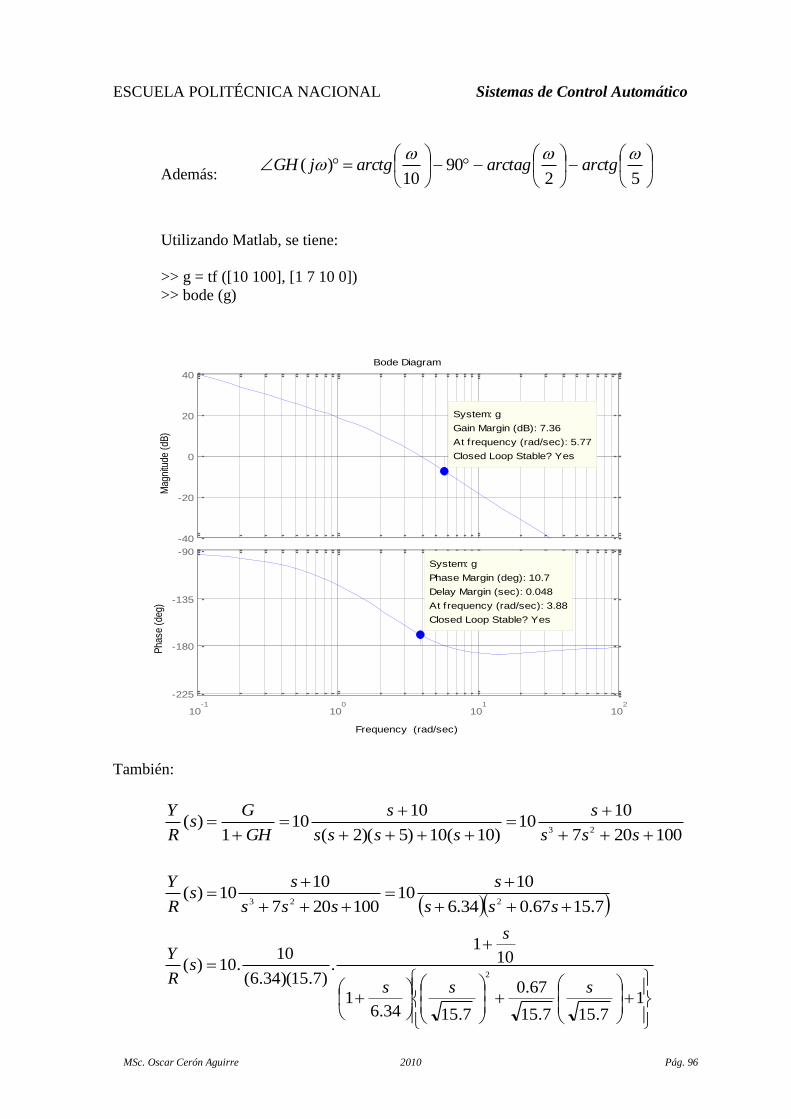
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 96
Además:
5290
10)(
arctgarctagarctgjGH
Utilizando Matlab, se tiene:
>> g = tf ([10 100], [1 7 10 0])
>> bode (g)
Bode Diagram
Frequency (rad/sec)
-40
-20
0
20
40
Mag
nitu
de (
dB)
System: g
Gain Margin (dB): 7.36
At frequency (rad/sec): 5.77
Closed Loop Stable? Yes
10-1
100
101
102
-225
-180
-135
-90
Pha
se (
deg)
System: g
Phase Margin (deg): 10.7
Delay Margin (sec): 0.048
At frequency (rad/sec): 3.88
Closed Loop Stable? Yes
También:
100207
1010
)10(10)5)(2(
1010
1)(
23
sss
s
ssss
s
GH
Gs
R
Y
7.1567.034.6
1010
100207
1010)(
223
sss
s
sss
ss
R
Y
17.157.15
67.0
7.1534.61
101
.)7.15)(34.6(
10.10)(
2
sss
s
sR
Y
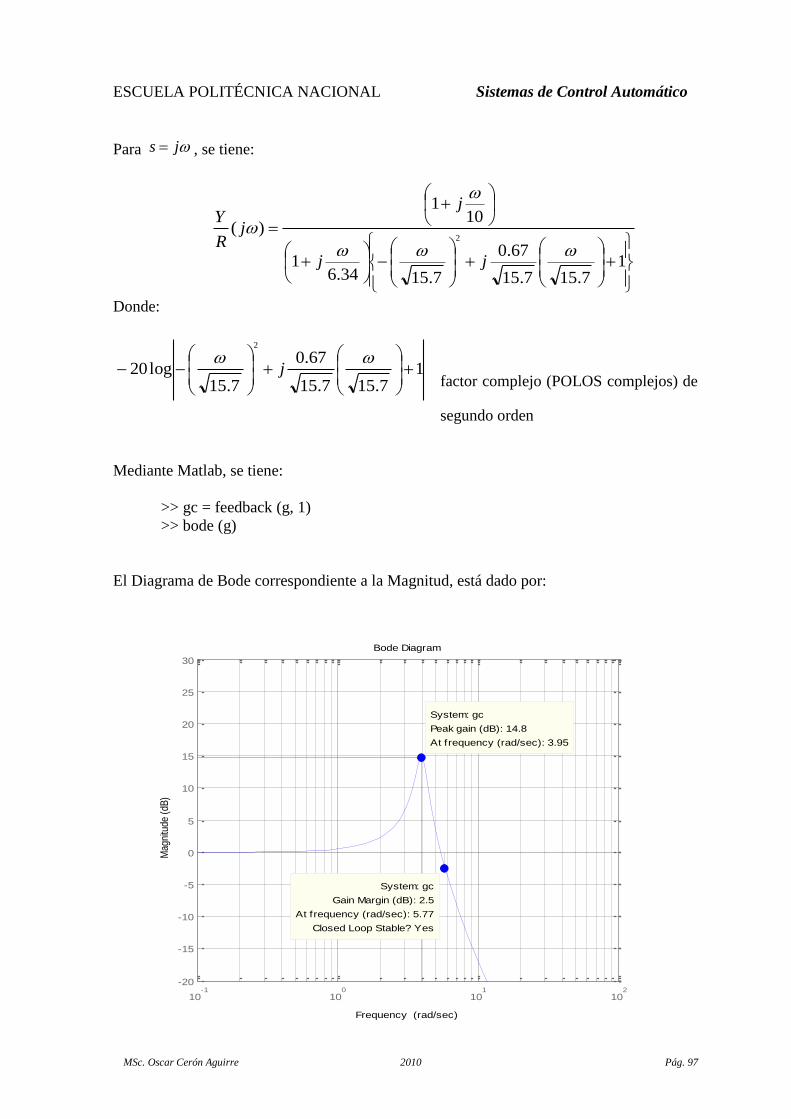
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 97
Para js , se tiene:
17.157.15
67.0
7.1534.61
101
)(2
jj
j
jR
Y
Donde:
17.157.15
67.0
7.15log20
2
j
factor complejo (POLOS complejos) de
segundo orden
Mediante Matlab, se tiene:
>> gc = feedback (g, 1)
>> bode (g)
El Diagrama de Bode correspondiente a la Magnitud, está dado por:
Bode Diagram
Frequency (rad/sec)
10-1
100
101
102
-20
-15
-10
-5
0
5
10
15
20
25
30
System: gc
Peak gain (dB): 14.8
At frequency (rad/sec): 3.95
Mag
nitu
de (
dB)
System: gc
Gain Margin (dB): 2.5
At frequency (rad/sec): 5.77
Closed Loop Stable? Yes
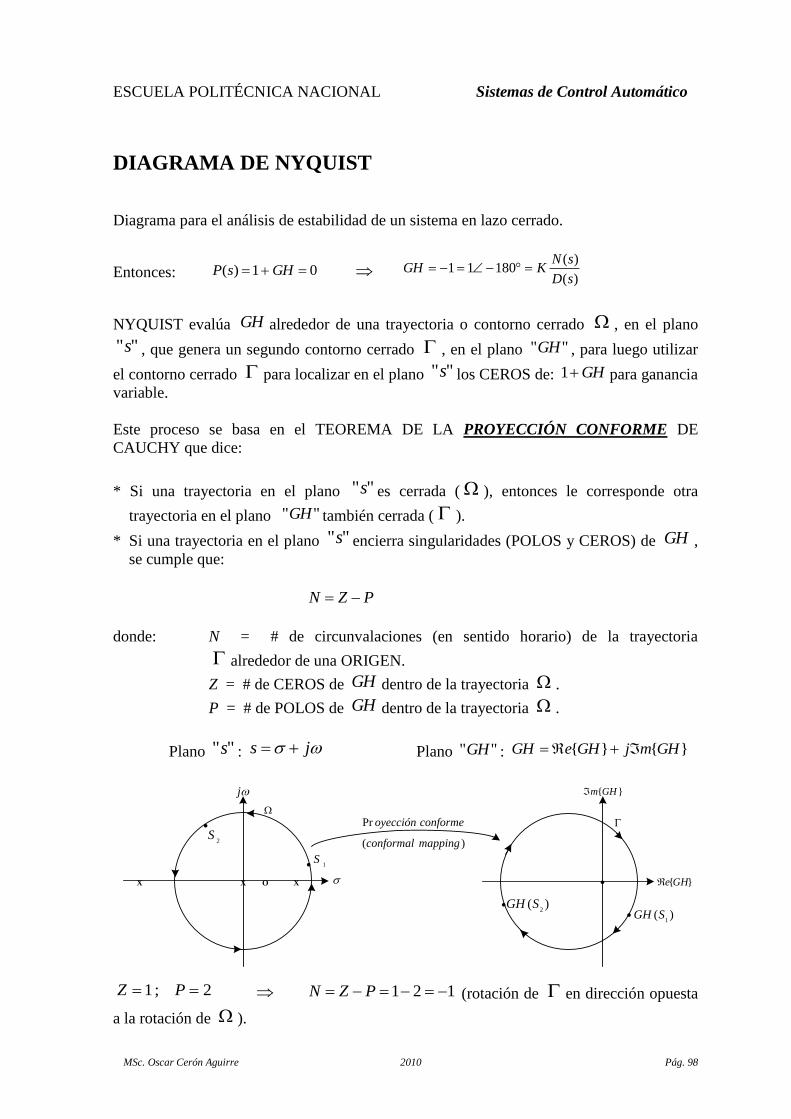
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 98
DIAGRAMA DE NYQUIST
Diagrama para el análisis de estabilidad de un sistema en lazo cerrado.
Entonces: 01)( GHsP )(
)(18011
sD
sNKGH
NYQUIST evalúa GH alrededor de una trayectoria o contorno cerrado , en el plano
""s , que genera un segundo contorno cerrado , en el plano ""GH , para luego utilizar
el contorno cerrado para localizar en el plano ""s los CEROS de: GH1 para ganancia
variable.
Este proceso se basa en el TEOREMA DE LA PROYECCIÓN CONFORME DE
CAUCHY que dice:
* Si una trayectoria en el plano ""s es cerrada ( ), entonces le corresponde otra
trayectoria en el plano ""GH también cerrada ( ).
* Si una trayectoria en el plano ""s encierra singularidades (POLOS y CEROS) de GH ,
se cumple que:
PZN
donde: N = # de circunvalaciones (en sentido horario) de la trayectoria
alrededor de una ORIGEN.
Z = # de CEROS de GH dentro de la trayectoria .
P = # de POLOS de GH dentro de la trayectoria .
Plano ""s : js Plano ""GH : }{}{ GHmjGHeGH
j
XX X
O
1S
2S
)(1
SGH)(
2SGH
}{GHe
}{GHm
)(
Pr
mappingconformal
conformeoyección
2;1 PZ 121 PZN (rotación de en dirección opuesta
a la rotación de ).
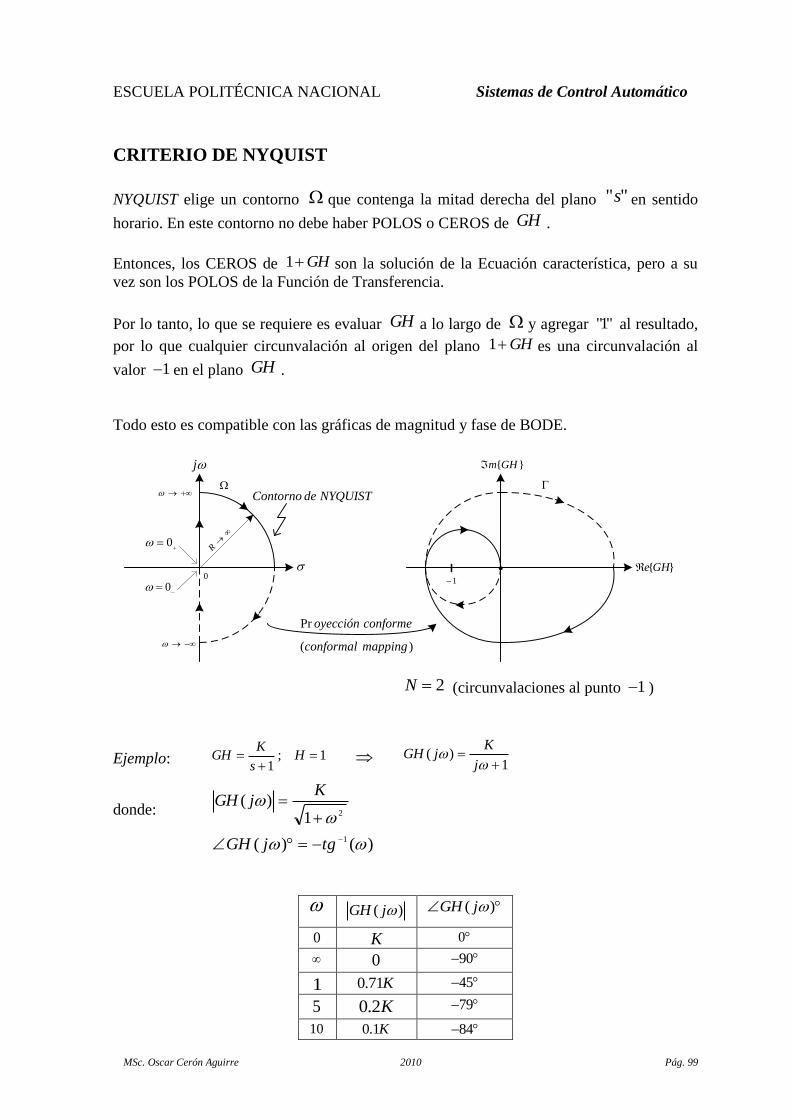
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 99
CRITERIO DE NYQUIST
NYQUIST elige un contorno que contenga la mitad derecha del plano ""s en sentido
horario. En este contorno no debe haber POLOS o CEROS de GH .
Entonces, los CEROS de GH1 son la solución de la Ecuación característica, pero a su
vez son los POLOS de la Función de Transferencia.
Por lo tanto, lo que se requiere es evaluar GH a lo largo de y agregar "1" al resultado,
por lo que cualquier circunvalación al origen del plano GH1 es una circunvalación al
valor 1 en el plano GH .
Todo esto es compatible con las gráficas de magnitud y fase de BODE.
j
0
0
R
0
1
}{GHe
}{GHm
NYQUISTdeContorno
)(
Pr
mappingconformal
conformeoyección
2N (circunvalaciones al punto 1 )
Ejemplo: 1;1
Hs
KGH 1
)(
j
KjGH
donde: 21)(
KjGH
)()( 1 tgjGH
)( jGH )( jGH
0 K 0
0 90
1 K71.0 45
5 K2.0 79
10 K1.0 84

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 100
Entonces:
j
R
0X
1
)}({ jGHe
)}({ jGHm
0
1
0K
4571.0 K
792.0 K
8 41.0 K
900
0P 00 ZN
Ejemplo: 1;)1(
Hss
KGH )1(
)(
jj
KjGH
donde: 21)(
KjGH
)(90)( 1 tgjGH
entonces:
)(lim0
jGH 0)(lim
jGH
90)(lim0
jGH
180)(lim
jGH

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 101
j
X
1
X )}({ jGHe
)}({ jGHm
0
0
1
)0(0 s
R
P = 0 N = 0 Z = 0
La semicircunferencia de radio infinitesimal )( se proyecta como semicircunferencia de
radio infinito.
La semicircunferencia de radio infinito )(R se proyecta como semicircunferencia de radio
infinitesimal.
Ejemplo: 1;)2)(1(
Hsss
KGH )2)(1(
)(
jjj
KjGH
donde: )4)(1(
)(22
K
jGH
2)(90)( 11
tgtgjGH
entonces:
)(lim0
jGH 0)(lim
jGH
90)(lim0
jGH
270)(lim
jGH
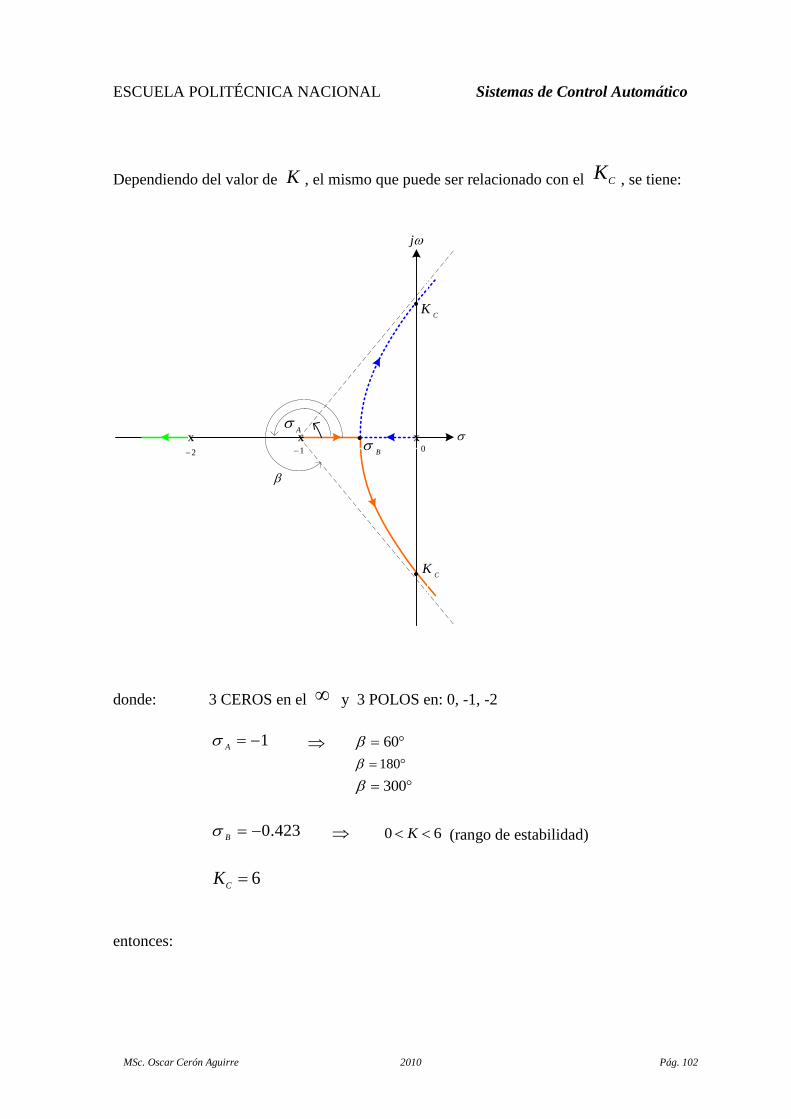
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 102
Dependiendo del valor de K , el mismo que puede ser relacionado con el CK , se tiene:
XX X
j
012
B
A
CK
CK
donde: 3 CEROS en el y 3 POLOS en: 0, -1, -2
1A
60
180
300
423.0B
60 K (rango de estabilidad)
6C
K
entonces:
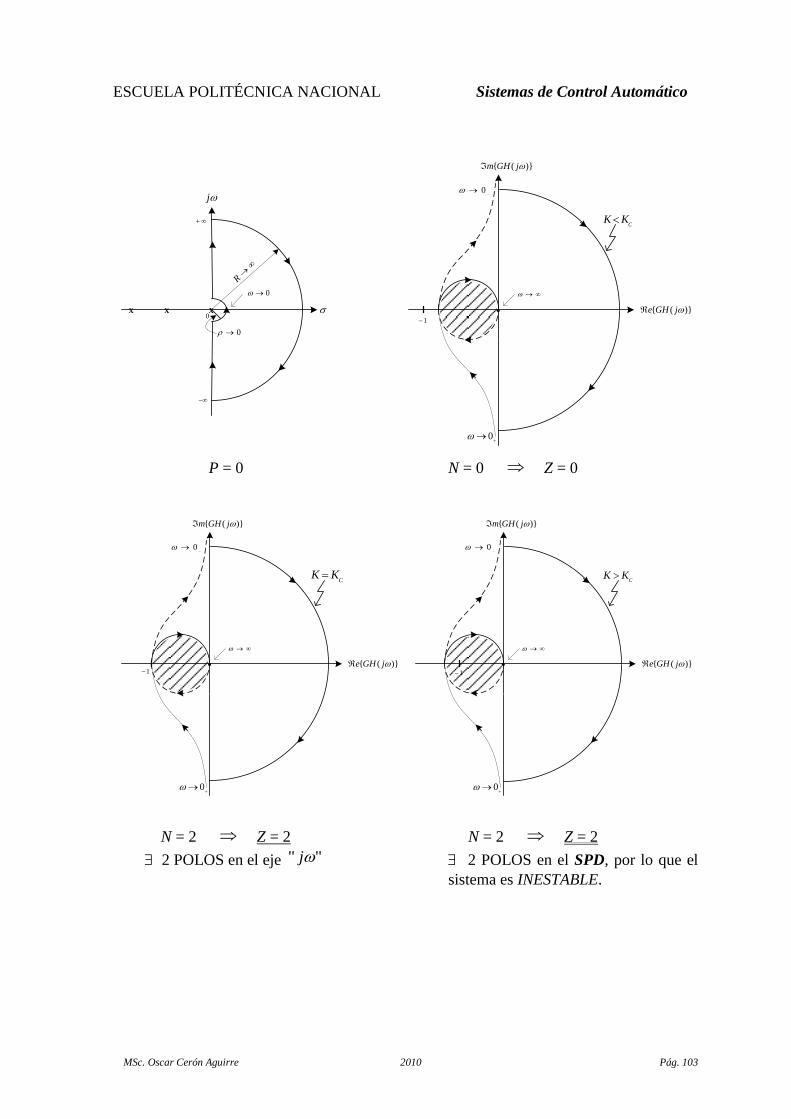
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 103
j
X
XX
0
R
0
0
1
0
0
)}({ jGHe
)}({ jGHm
CKK
P = 0 N = 0 Z = 0
1
0
0
)}({ jGHe
)}({ jGHm
CKK
1
0
0
)}({ jGHe
)}({ jGHm
CKK
N = 2 Z = 2 N = 2 Z = 2
2 POLOS en el eje "" j 2 POLOS en el SPD, por lo que el
sistema es INESTABLE.
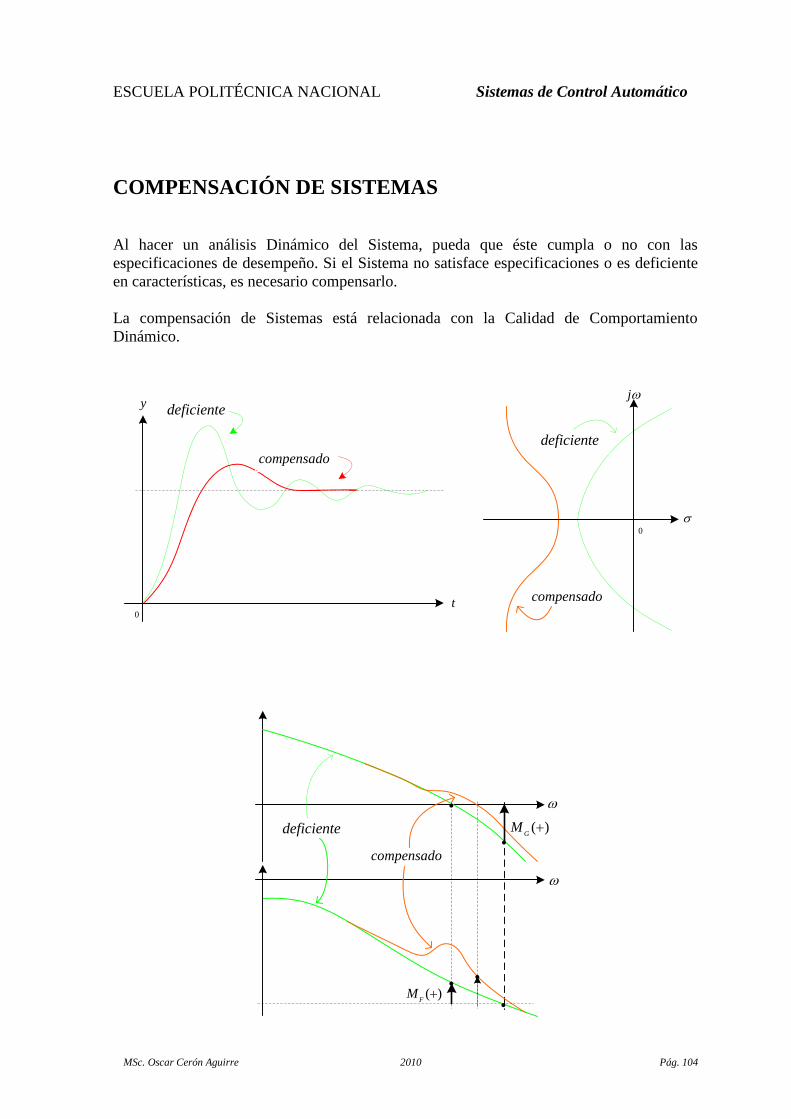
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 104
COMPENSACIÓN DE SISTEMAS
Al hacer un análisis Dinámico del Sistema, pueda que éste cumpla o no con las
especificaciones de desempeño. Si el Sistema no satisface especificaciones o es deficiente
en características, es necesario compensarlo.
La compensación de Sistemas está relacionada con la Calidad de Comportamiento
Dinámico.
compensado
deficiente
0
t
y
0
j
deficiente
compensado
deficiente
compensado
)(G
M
)(F
M
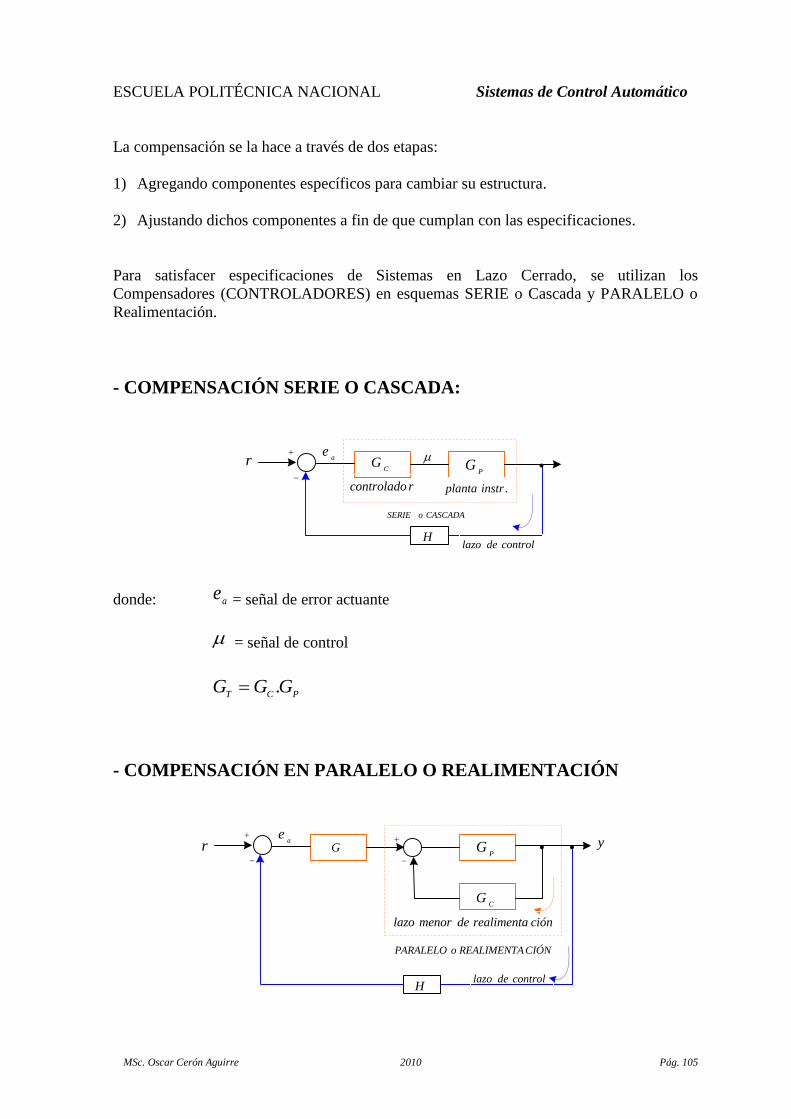
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 105
La compensación se la hace a través de dos etapas:
1) Agregando componentes específicos para cambiar su estructura.
2) Ajustando dichos componentes a fin de que cumplan con las especificaciones.
Para satisfacer especificaciones de Sistemas en Lazo Cerrado, se utilizan los
Compensadores (CONTROLADORES) en esquemas SERIE o Cascada y PARALELO o
Realimentación.
- COMPENSACIÓN SERIE O CASCADA:
CG
PG
H
ae
CASCADAoSERIE
rcontrolado .instrplanta
controldelazo
r
donde: ae = señal de error actuante
= señal de control
PCTGGG .
- COMPENSACIÓN EN PARALELO O REALIMENTACIÓN
CG
PG
H
ae
controldelazo
G
CIÓNREALIMENTAoPARALELO
ciónrealimentademenorlazo
r y
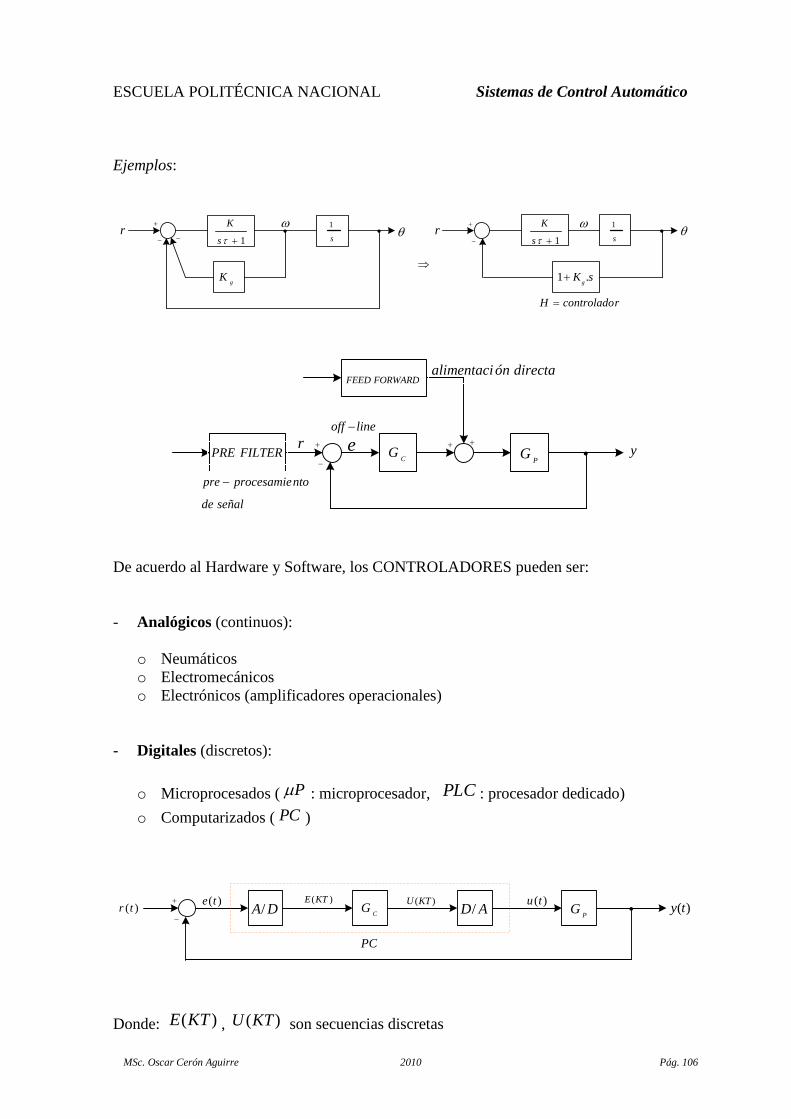
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 106
Ejemplos:
1s
K
s
1
gK
rr
sKg.1
1s
K
s
1
rcontroladoH
C
GP
Gr
yeFILTERPRE
FORWARDFEEDdirectaónalimentaci
señalde
ntoprocesamiepre
lineoff
De acuerdo al Hardware y Software, los CONTROLADORES pueden ser:
- Analógicos (continuos):
o Neumáticos
o Electromecánicos
o Electrónicos (amplificadores operacionales)
- Digitales (discretos):
o Microprocesados ( P : microprocesador, PLC : procesador dedicado)
o Computarizados ( PC )
)(tr)(te )(tu
)(tyC
GP
GDA/ AD/)(KTE )(KTU
PC
Donde: )(KTE , )(KTU son secuencias discretas
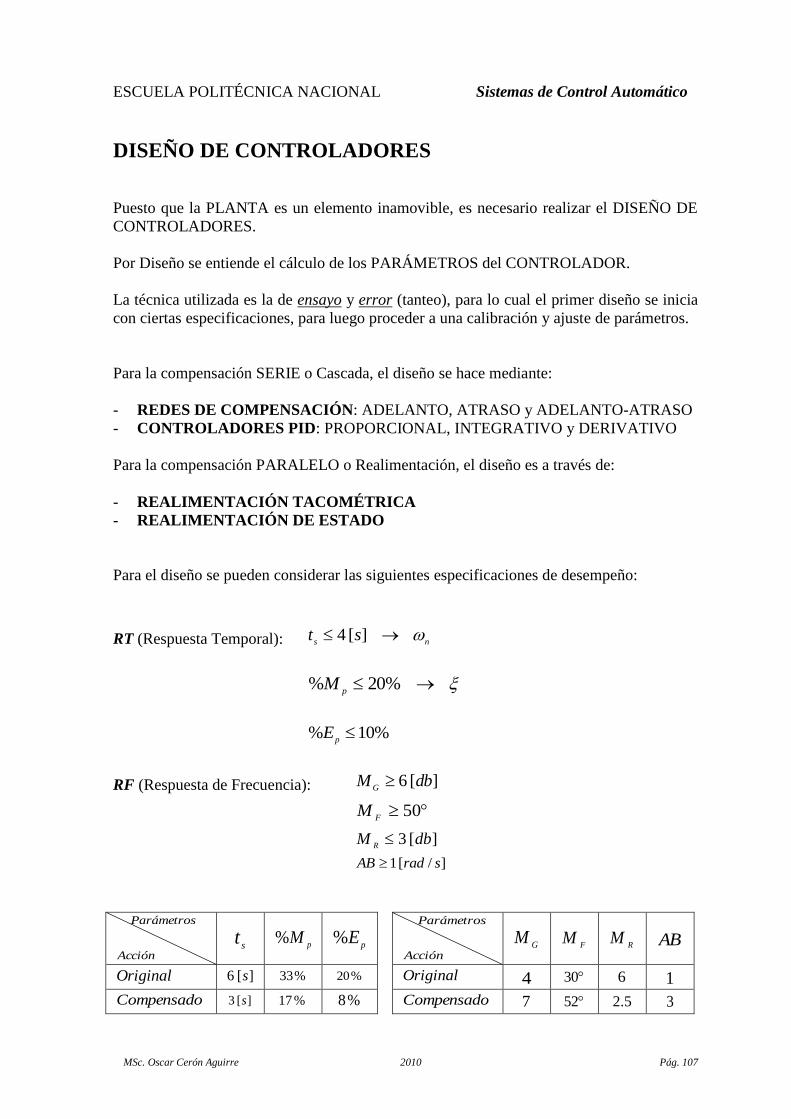
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 107
DISEÑO DE CONTROLADORES
Puesto que la PLANTA es un elemento inamovible, es necesario realizar el DISEÑO DE
CONTROLADORES.
Por Diseño se entiende el cálculo de los PARÁMETROS del CONTROLADOR.
La técnica utilizada es la de ensayo y error (tanteo), para lo cual el primer diseño se inicia
con ciertas especificaciones, para luego proceder a una calibración y ajuste de parámetros.
Para la compensación SERIE o Cascada, el diseño se hace mediante:
- REDES DE COMPENSACIÓN: ADELANTO, ATRASO y ADELANTO-ATRASO
- CONTROLADORES PID: PROPORCIONAL, INTEGRATIVO y DERIVATIVO
Para la compensación PARALELO o Realimentación, el diseño es a través de:
- REALIMENTACIÓN TACOMÉTRICA
- REALIMENTACIÓN DE ESTADO
Para el diseño se pueden considerar las siguientes especificaciones de desempeño:
RT (Respuesta Temporal): nsst ][4
%20%p
M
%10% p
E
RF (Respuesta de Frecuencia): ][6 dbMG
50F
M
][3 dbMR
]/[1 sradAB
Acción
Parámetros
st p
M% pE%
Acción
Parámetros
GM F
M RM AB
Original ][6 s %33 %20 Original 4 30 6 1
Compensado ][3 s %17 %8 Compensado 7 52 5.2 3

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 108
REDES DE COMPENSACIÓN
C
GP
Gr ye
u
Se trata del diseño del controlador: ps
zsKG
CC
donde: CK = Ganancia de compensación (ajuste de ganancia)
z = valor del CERO de compensación
p = valor del POLO de compensación
Para bajas frecuencias:
p
zK
ps
zsK
CCs 0lim
depende de z y p
Para altas frecuencias: CCs
Kps
zsK
lim no depende de z y p
Para: js pj
zjKjG
CC
)(
donde:
22
1log201log20log20)(
pzp
zKjG
CdbC
ptg
ztgjG
C
11)(
Si: z < p, se tiene una Red de Adelanto de fase (RED DE ADELANTO), puesto que:
ptg
ztg
11
, ángulo (+)

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 109
Una Red de Adelanto mejora la Respuesta Transitoria (Modifica el LGR).
Si: z > p, se tiene una Red de Atraso de fase (RED DE ATRASO), puesto que:
ptg
ztg
11
, ángulo (-)
Una Red de Atraso mejora el Error en Estado Estable (no modifica el LGR)
Si se quiere mejorar el Transitorio y el Error se usan REDES ADELANTO-ATRASO.
DISEÑO DE RED DE ATRASO
En una Red de Atraso (z > p) se trata de obtener:
- Ganancia a baja frecuencia
- Elección de POLOS y CEROS de bajo valor para introducir unos pocos grados de
atraso de fase.
Considerando:
ps
zsGK
CC
.11
entonces:
Gananciap
z
ps
zss
.1.1lim0
Conocido el valor de GANANCIA, se puede elegir POLOS y CEROS de bajo valor.

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 110
Ejemplo: Dado 1;
)2)(1(
4
H
ssG
P , determinar el valor del POLO y el CERO
del compensador para que %10% p
E .
donde:
2)2)(1(
4limlim
00
ssHGK
sP
sp
%3.33%3
1
21
1
1
1
p
p
pE
KE
Se requiere satisfacer: 9
1
11.0%10%
p
p
pK
KE
,
entonces se puede considerar 9p
K
Puesto que la compensación requiere elevar de 2p
K a 9p
K , entonces se tiene una
ganancia = 4.5 (2 x 4.5 = 9)
Eligiendo una ganancia: etcp
z
02.0
1.0
2.0
1
2
105
Por lo tanto, se puede considerar valores de: 1.0z
02.0p
a su vez: 1z
2.0p
con lo que se tiene:
2.0
1.1
s
s
)2)(1(
4
ss )2)(2.0(
4
ss
proceso que probablemente se volvería demasiado lento, por loe que puede añadirse otro
compensador para mejorar la respuesta transitoria (Red de Adelanto).
r
ps
zsK
C
2.0
1.1
s
s
)2)(1(
4
ssy
ATRASODEREDADELANTODERED
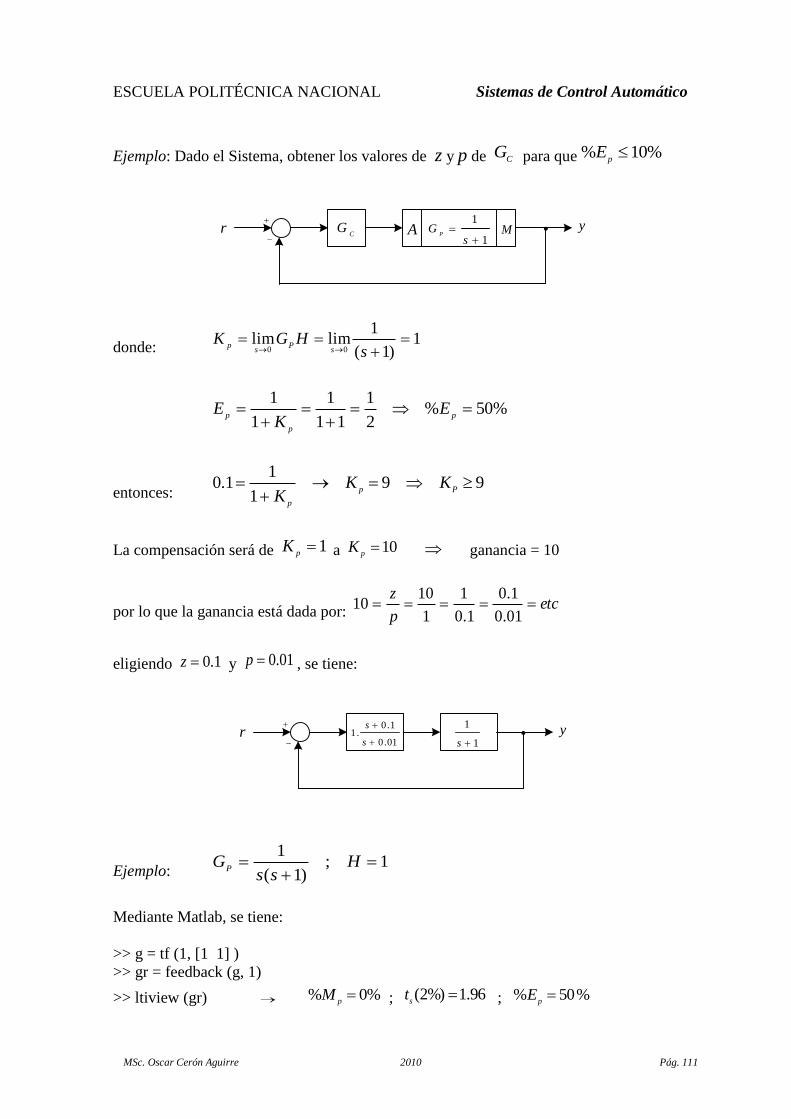
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 111
Ejemplo: Dado el Sistema, obtener los valores de z y p de CG para que %10%
pE
r y
CG
1
1
sG
PA M
donde: 1
)1(
1limlim
00
sHGK
sP
sp
%50%
2
1
11
1
1
1
p
p
pE
KE
entonces: 99
1
11.0
Pp
p
KKK
La compensación será de 1p
K a 10p
K ganancia = 10
por lo que la ganancia está dada por: etc
p
z
01.0
1.0
1.0
1
1
1010
eligiendo 1.0z y 01.0p , se tiene:
r y
01.0
1.0.1
s
s
1
1
s
Ejemplo: 1;
)1(
1
H
ssG
P
Mediante Matlab, se tiene:
>> g = tf (1, [1 1] )
>> gr = feedback (g, 1)
>> ltiview (gr) %0% p
M ; 96.1%)2( s
t ; %50% p
E

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 112
Entonces:
11
1lim
0
GHK
sp
%50%2
1
11
1
1
1
p
p
pE
KE
Se requiere: 9
1
11.0
1
1%10%
p
pp
ppK
KKEE
Si 10p
K la ganancia viene dada por: etcp
z
01.0
1.0
1.0
1
1
1010
Entonces: 01.0
1.01.11
s
s
ps
zsGK
CC
>> gc = tf ([1 0.1], [1 0.01])
>> gt = series (g, gc)
>> gtr = feedback (gt, 1)
>> ltiview (gtr) %0% p
M ; 3.55%)2( s
t ; %1.9% p
E
Se ha mejorado notablemente st , por lo que al mantener la ganancia baja a una frecuencia
= 10, se tiene:
1.0
1.1
s
s
1
1
s 1.0
1
s
CG
PG
TG
>> gc = tf ([1 1], [1 0.1])
>> gt = series (g, gc)
>> gtr = feedback (gt, 1)
>> ltiview (gtr) %0% p
M ; 56.3%)2( s
t ; %1.9% p
E

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 113
DISEÑO DE RED DE ADELANTO
Este diseño se hace en base a especificaciones de tiempo y usando LGR.
Las especificaciones de tiempo son: nsst ][4
%20%p
M
%10% p
E
Eligiendo valores de desempeño, se determinan los POLOS DESEADOS en la región de
convergencia del plano ""s .
2
2,11
nnjp
1
j
0
deseadospolos
Para disminuir el error, es necesario aumentar la ganancia (ajuste de ganancia)
)(
)(limlim
00 sD
sNKGHK
ssp
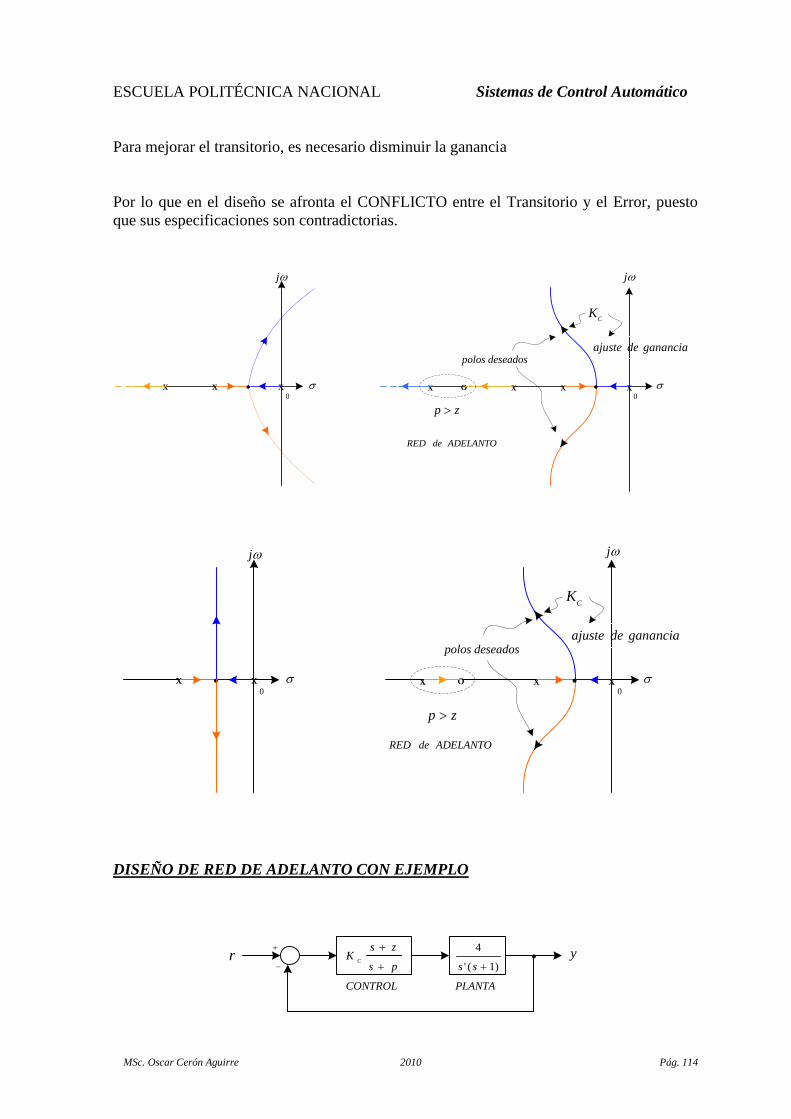
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 114
Para mejorar el transitorio, es necesario disminuir la ganancia
Por lo que en el diseño se afronta el CONFLICTO entre el Transitorio y el Error, puesto
que sus especificaciones son contradictorias.
0
j
0
j
XXX XXXOX
zp
deseadospolos
CK
gananciadeajuste
ADELANTOdeRED
0
j
XX 0
j
XXOX
zp
deseadospolos
CK
gananciadeajuste
ADELANTOdeRED
DISEÑO DE RED DE ADELANTO CON EJEMPLO
r y
ps
zsK
C
)1('
4
ss
PLANTACONTROL
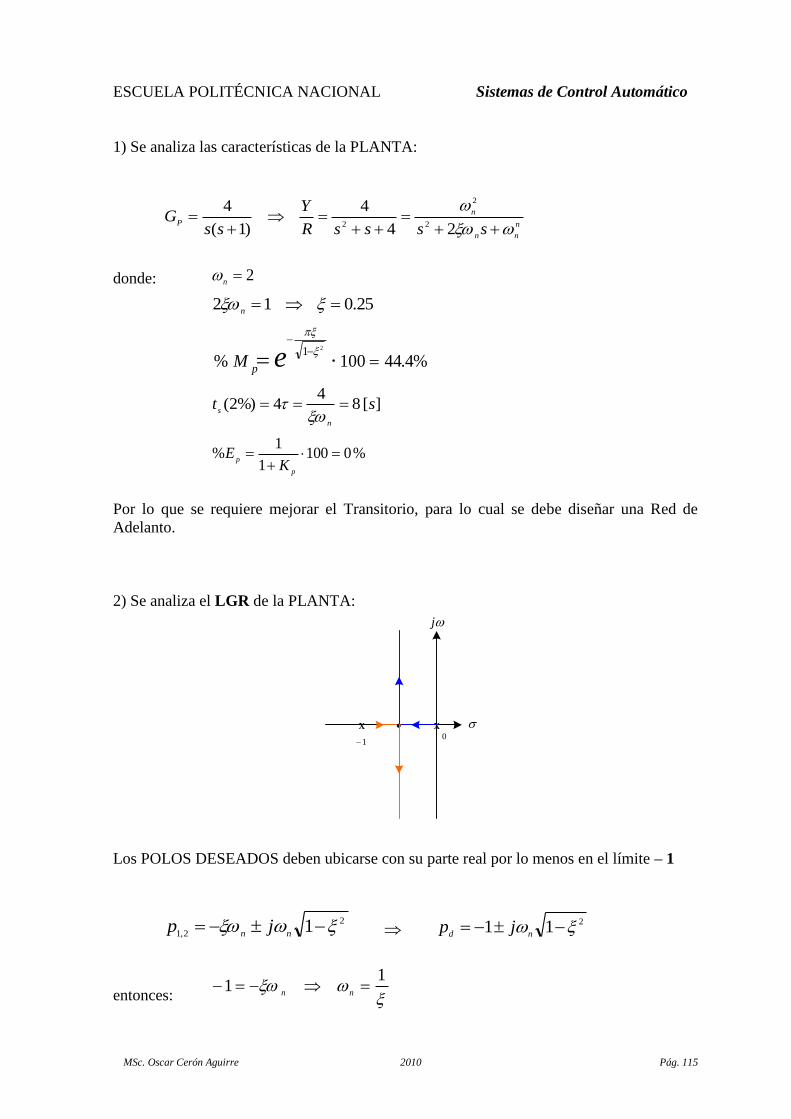
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 115
1) Se analiza las características de la PLANTA:
n
nn
n
PssssR
Y
ssG
24
4
)1(
42
2
2
donde: 2n
25.012 n
%4.44100%21
ep
M
][84
4%)2( stn
s
%0100
1
1%
p
pK
E
Por lo que se requiere mejorar el Transitorio, para lo cual se debe diseñar una Red de
Adelanto.
2) Se analiza el LGR de la PLANTA:
0
j
XX
1
Los POLOS DESEADOS deben ubicarse con su parte real por lo menos en el límite – 1
2
2,11
nnjp
211 nd
jp
entonces:
11
nn
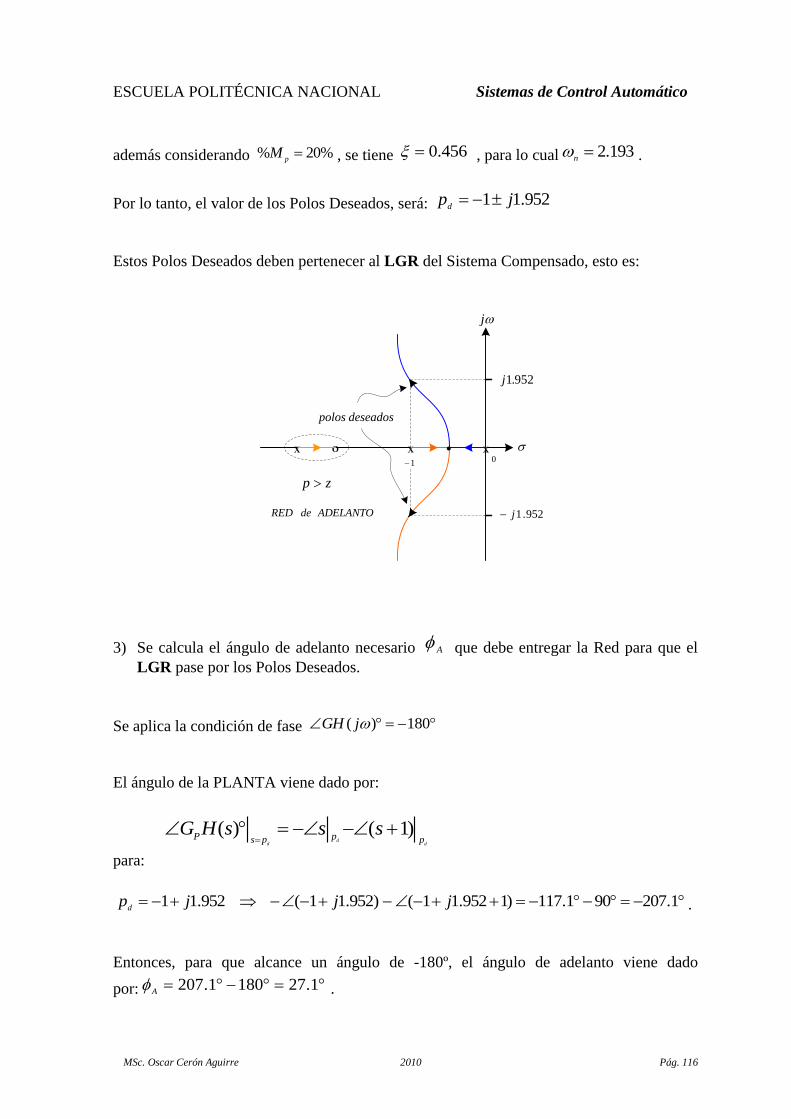
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 116
además considerando %20% p
M , se tiene 456.0 , para lo cual 193.2n
.
Por lo tanto, el valor de los Polos Deseados, será: 952.11 jpd
Estos Polos Deseados deben pertenecer al LGR del Sistema Compensado, esto es:
0
j
XXOX
zp
deseadospolos
1
952.1j
952.1jADELANTOdeRED
3) Se calcula el ángulo de adelanto necesario A que debe entregar la Red para que el
LGR pase por los Polos Deseados.
Se aplica la condición de fase 180)( jGH
El ángulo de la PLANTA viene dado por:
dd
dpppsP
sssHG )1()(
para:
1.207901.117)1952.11()952.11(952.11 jjjpd .
Entonces, para que alcance un ángulo de -180º, el ángulo de adelanto viene dado
por: 1.271801.207A
.

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 117
4) Con el ángulo de adelanto A , se fija el valor del CERO y se determina el valor del
POLO del Compensador.
Si: ACsGz )(1
donde: ApppsCd
dd
psssG
)()1()(
Para: 1.27)952.11()1952.11(952.11 pjjjpd
entonces: 952.1)9.62(1
952.19.62901.27
1
952.11
tg
pptg
donde: 211 pp
por lo tanto:
2
1
s
sK
C
)1('
4
ss )2(
4
ss
KC
[
Este Sistema no cumple con la condición de que por el LGR pasen los Polos Deseados, por
lo que se debe volver a recalcular los valores de z y p del Compensador.
Así, si: Appd
d
pssz )()2(2
Entonces, para:
1.27)952.11()2952.11(952.11 pjjjpd
se tiene que:
7.372.0)8.35(1
952.18.359.621.27
1
952.11
ptg
pptg
Donde:
)1('
4
ss7.3
2
s
sK
C)7.3)(1(
2
sss
sK
CG
PG
TG

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 118
5) Se dibuja el LGR de )(sGT para comprobar que pase por los Polos Deseados.
6) Para el cálculo de la ganancia CKK 4 se aplica la condición de módulo, esto es:
1)7.3)(1(
21
d
d
p
pTsss
sKG
entonces, para:
17.3951.111952.11952.11
2952.11952.11
jjj
jKjp
d
donde: 63.15.6 C
KK
entonces:
r y
7.3
263.1
s
s
)1('
4
ss
La Respuesta Temporal de este Sistema Compensado arroja los siguientes datos:
]/[28.2 sradn %6.26%
pM
441.0 ][76.3%)2( sts
Por lo tanto, el aún no cumplir con las especificaciones, es necesario hacerle un ajuste fino
al COMPENSADOR.
Así, considerando el valor del CERO del Compensador en un 80%, esto es: 8.02 s se
tienen los siguientes resultados del Sistema Compensado:
]/[59.1 sradn %3.18%
pM
632.0 ][64.2%)2( sts

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 119
Ejemplo: Dado el Sistema, determinar la Ganancia de Compensación K para que la planta
responda con %10% p
E en un ][2.0%)2( sts
.
r y
PLANTA
K3
1
s
RCONTROLADO
Sistema Original: 3
1
sG
P
donde: %751001
1%
3
1
3
1limlim
00
p
ps
Ps
pK
Es
GK
25.014
1
1 41
41
ssHG
G
R
Y
P
P
][14%)2( sts
Sistema Compensado: 3
s
KG
P
donde: 3lim
0
KGK
Ps
p
KKs
K
HG
G
R
Y
P
P
3
1
)3(1
][3
44%)2( s
Kt
s
Considerando: %8% p
E
se tiene: 5.341
08.0
131
13
1
1
1
1
3
pK
p
pE
KK
E
donde: ][11.03
4%)2( s
Kt
s

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 120
DISEÑO DE RED DE ADELANTO USANDO RF
Para el Diseño de una Red de Adelanto, usando la Respuesta de Frecuencia, se emplea
Redes Pasivas o Amplificadores Operacionales.
En una Red de Adelanto: p > z
j
xp
T
1
T
1
z
entonces: 10 1
1
1
1
Ts
TsK
Ts
Ts
Kps
zsKG
CCCC
donde: y T se determinan a partir de la deficiencia de ángulo, mientras que CK se
determina a partir del requisito de la ganancia en lazo abierto.
El diagrama POLAR del Compensador de Adelanto, viene dado por:
TTj
TjjG
Ts
Ts
GCC
1
1)(
1
1
1
; 10
donde:
)(lim0
jGC
1)(lim
jGC
1
)}({ jGeC
)}({ jGmC
m
02
1 radio
2
1
0
Am
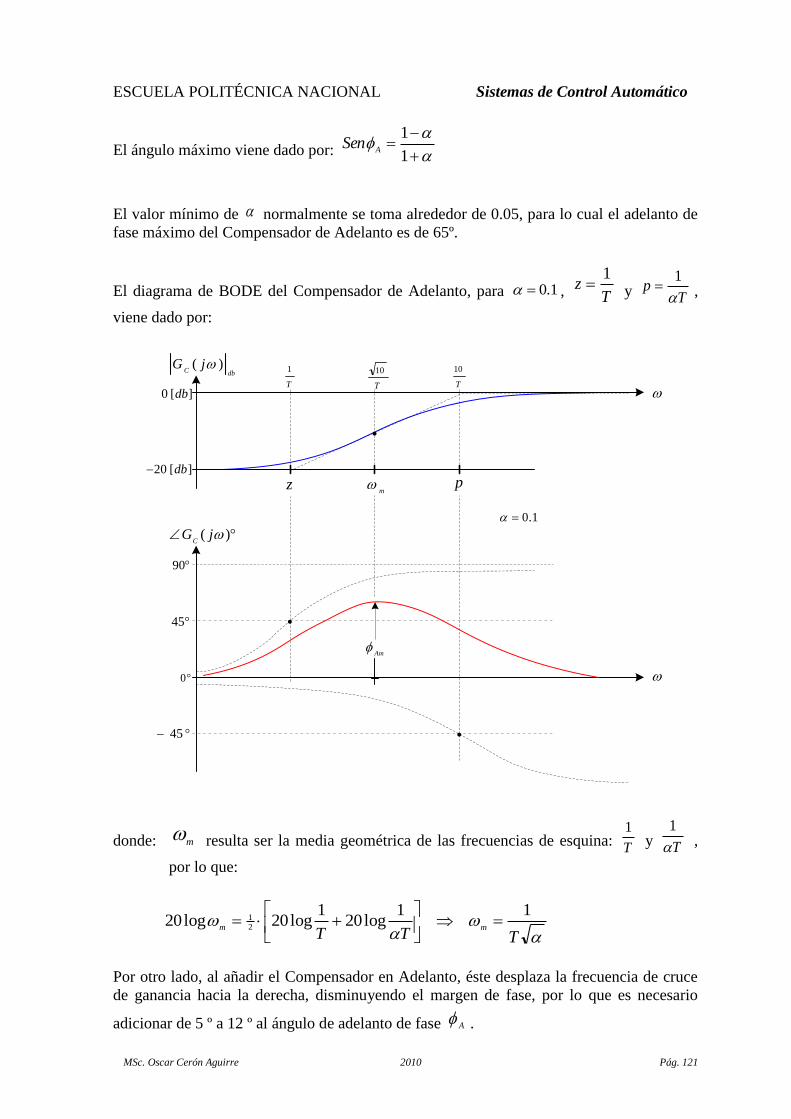
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 121
El ángulo máximo viene dado por:
1
1A
Sen
El valor mínimo de normalmente se toma alrededor de 0.05, para lo cual el adelanto de
fase máximo del Compensador de Adelanto es de 65º.
El diagrama de BODE del Compensador de Adelanto, para 1.0 , Tz
1 y T
p
1 ,
viene dado por:
dbCjG )(
T
1
T
10
T
10
z pm
][20 db
][0 db
0
)( jGC
90
45
45
Am
1.0
donde: m resulta ser la media geométrica de las frecuencias de esquina: T
1 y T
1 ,
por lo que:
TTTmm
11log20
1log20log20
2
1
Por otro lado, al añadir el Compensador en Adelanto, éste desplaza la frecuencia de cruce
de ganancia hacia la derecha, disminuyendo el margen de fase, por lo que es necesario
adicionar de 5 º a 12 º al ángulo de adelanto de fase A .

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 122
10originalMdeseadoMFFA
donde: )(180 jGoriginalMPF se visualiza en el diagrama de BODE.
1
1A
Sen A
A
Sen
Sen
1
1
También, la cantidad en la modificación de la curva de magnitud en
T
1 , debido a
la inclusión del término 1
1
Ts
Ts
, es:
1
11
11
1
1
1
j
j
Tj
jT
T
][log101
log20 dbM
La nueva frecuencia del corte C (en el diagrama de BODE) sirve para determinar el valor
de T, esto es:
TC
1
C
T1
Además:
1
1
1
1
Ts
TsK
Ts
Ts
KGCCC
11
CCKK
T
T
C
j
j
Tj
TjjG
1
1
1
1
1
1)(
Finalmente, diseñar una Red de Adelanto, usando la Respuesta de Frecuencia, es calcular
los valores de y T , mediante una componente analítica y una componente gráfica.
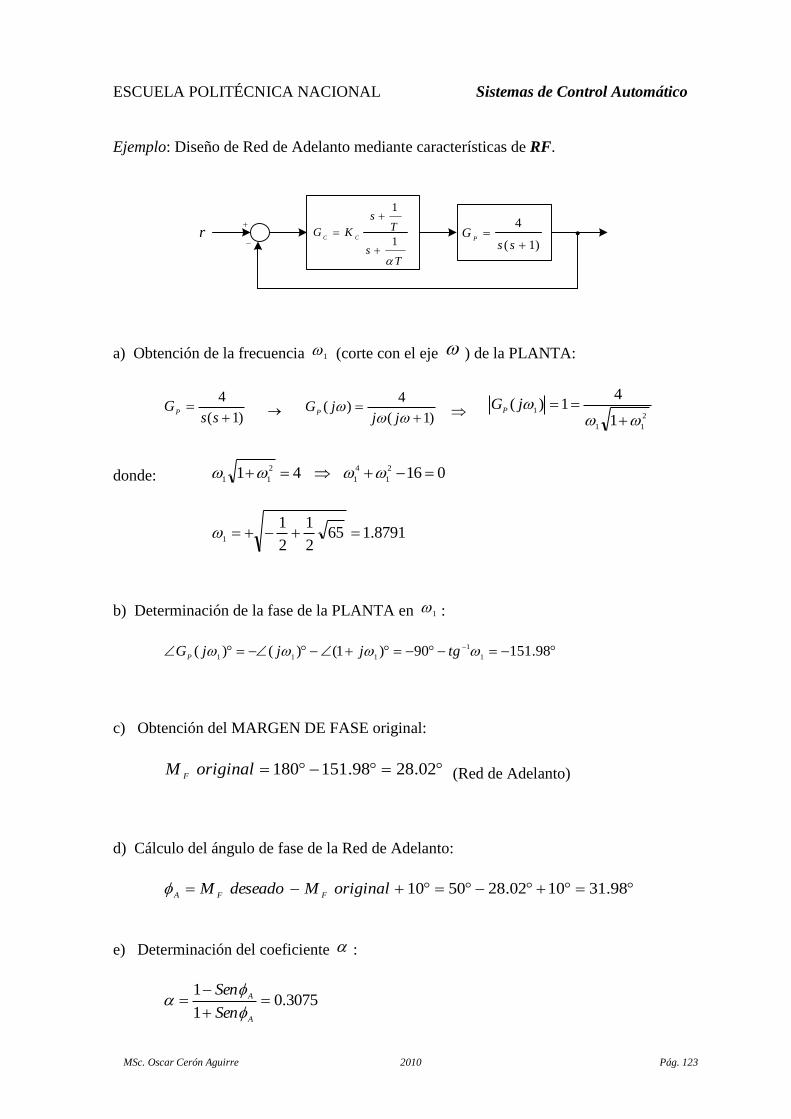
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 123
Ejemplo: Diseño de Red de Adelanto mediante características de RF.
r
Ts
Ts
KGCC
1
1
)1(
4
ssG
P
a) Obtención de la frecuencia 1 (corte con el eje ) de la PLANTA:
)1(
4
ssG
P )1(
4)(
jjjG
P 2
11
1
1
41)(
jG
P
donde: 01641 2
1
4
1
2
11
8791.1652
1
2
11
b) Determinación de la fase de la PLANTA en 1 :
98.15190)1()()(1
1
111 tgjjjG
P
c) Obtención del MARGEN DE FASE original:
02.2898.151180originalMF (Red de Adelanto)
d) Cálculo del ángulo de fase de la Red de Adelanto:
98.311002.285010originalMdeseadoMFFA
e) Determinación del coeficiente :
3075.01
1
A
A
Sen
Sen
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 124
f) Cálculo de M:
][1213.53075.0log10log10 dbM
g) Cálculo de T:
C
T1
Se debe graficar el diagrama de BODE y posicionarse en:
]/[59.2][1213.5 sraddbMC
Entonces: 6962.0
3075.059.2
1T
h) Cálculo de: 2519.31
C
K
4362.11
Tz
6705.41
T
p
Por lo tanto el diseño del COMPENSADOR viene dado por:
6705.4
4362.12519.3
s
sG
C
i) Gráficas de BODE de: CG , P
G y PCTGGG
donde: sss
s
sss
sG
T
6715.4671.5
68.1801.13
)1()6705.4(
)4362.1(42519.3
23
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 125
se obtienen los datos de BODE de 88.1,28:1
FPMG (calculados), así como
también 6.2,53:1
T
FTMG ( valores del sistema compensado).
La respuesta de TG a una entrada PASO, viene dada por:
68.1868.17671.5
68.1801.13
68.1801.136715.4671.5
68.1801.132323
sss
s
ssss
s
R
Y
Lo que implica: %8.16% p
M
][9.1%)2( sts
%0% p
E
Los comandos en Matlab serán:
>> w1 = sqrt ( - 0.5 + 0.5 * sqrt (65) )
>> gp = tf ( 4, [1 1 0] )
>> agp = - 90 – atand (w1)
>> mfo = 180 + agp
>> fa = 50 – mfo + 10
>> alfa = ( 1 – sind (fa) ) / ( 1 + sind (fa) )
>> m = - 10 * log10 (alfa)
>> bode
>> te = 1 / ( 2.59 * sqrt (alfa) )
>> kc = 1 / alfa
>> zero = 1 / te
>> polo = 1 / ( alfa * te )
>> gc = tf ( kc * [ 1 1 / te], [ 1 1 / ( alfa * te ) ] )
>> bode (gp)
>> hold on
>> bode (gc)
>> gt = series ( gp, gc )
>> bode ( gt )
>> gtr = feedback ( gt, 1 )
>> hold off
>> step ( gtr )
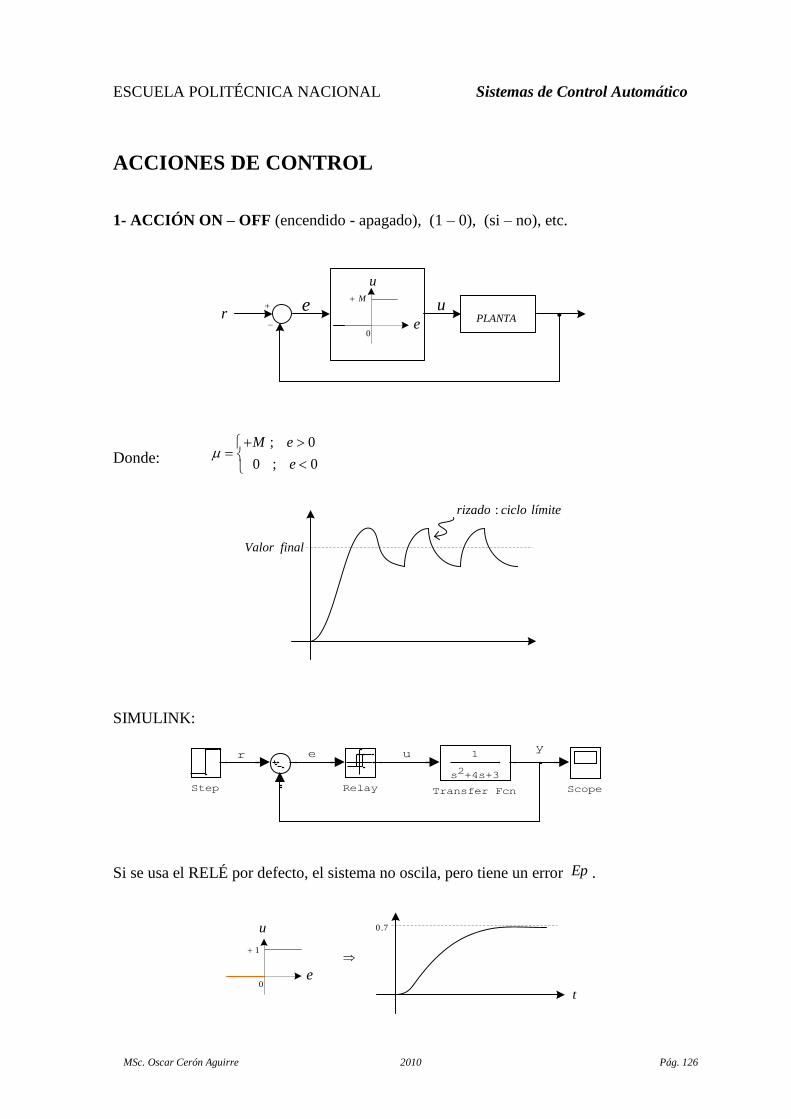
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 126
ACCIONES DE CONTROL
1- ACCIÓN ON – OFF (encendido - apagado), (1 – 0), (si – no), etc.
u
0
M
e PLANTA
r
ue
Donde:
0;0
0;
e
eM
finalValor
límiteciclorizado :
SIMULINK:
r e uy
1
s +4s+32
Transfer FcnStep ScopeRelay
Si se usa el RELÉ por defecto, el sistema no oscila, pero tiene un error Ep .
0e
u
1
t
7.0
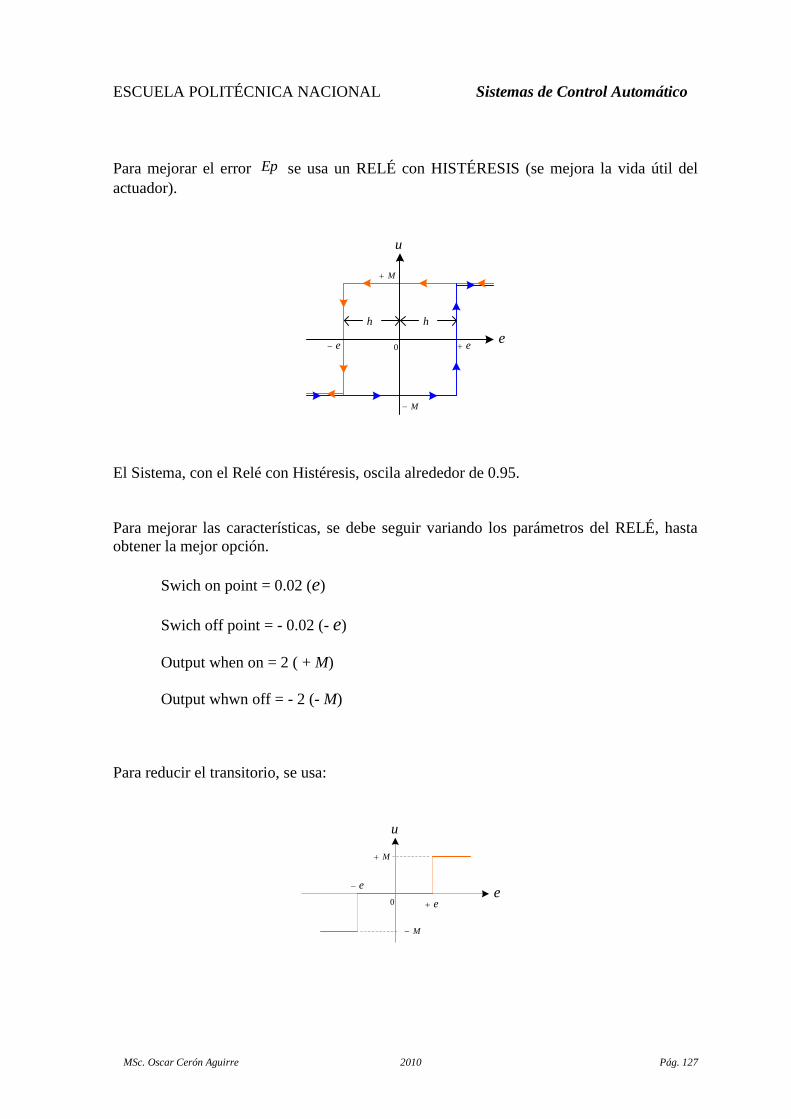
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 127
Para mejorar el error Ep se usa un RELÉ con HISTÉRESIS (se mejora la vida útil del
actuador).
0 ee
M
M
h h
e
u
El Sistema, con el Relé con Histéresis, oscila alrededor de 0.95.
Para mejorar las características, se debe seguir variando los parámetros del RELÉ, hasta
obtener la mejor opción.
Swich on point = 0.02 (e)
Swich off point = - 0.02 (- e)
Output when on = 2 ( + M)
Output whwn off = - 2 (- M)
Para reducir el transitorio, se usa:
0e
u
M
M
e
e
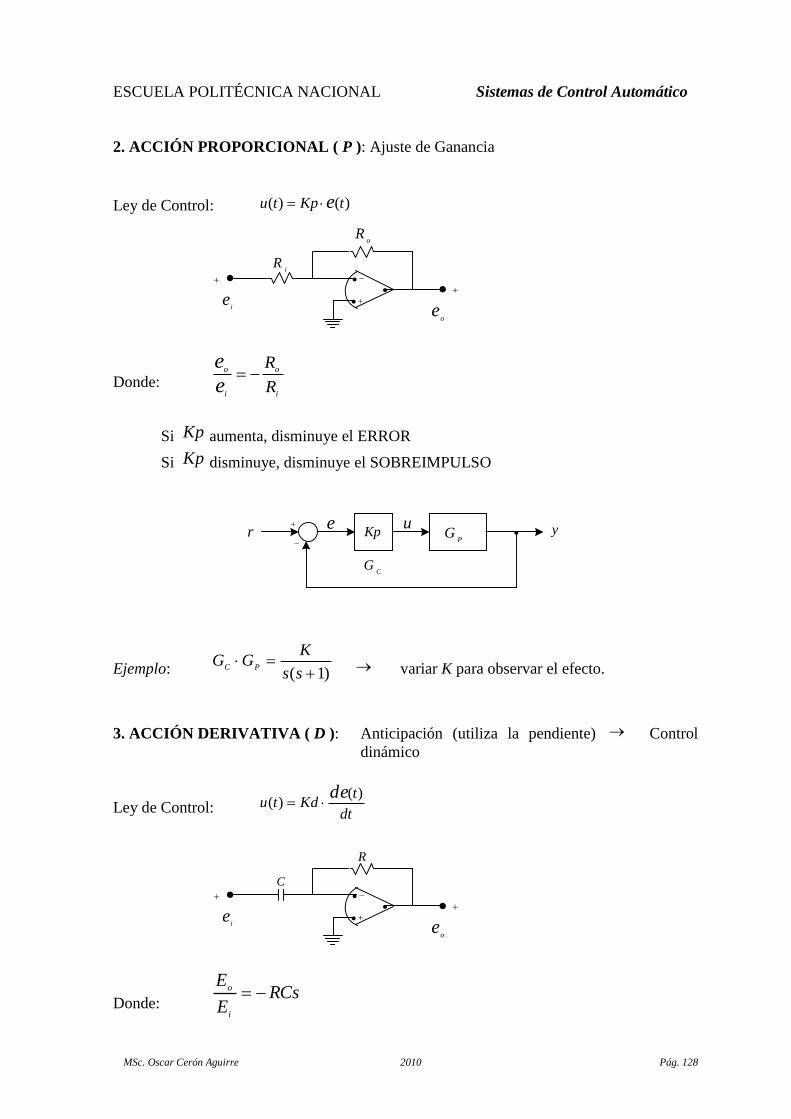
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 128
2. ACCIÓN PROPORCIONAL ( P ): Ajuste de Ganancia
Ley de Control: )()( tKptu e
ie
oe
oR
iR
Donde: i
o
i
o
R
R
e
e
Si Kp aumenta, disminuye el ERROR
Si Kp disminuye, disminuye el SOBREIMPULSO
r y
e uP
G
CG
Kp
Ejemplo: )1(
ss
KGG
PC variar K para observar el efecto.
3. ACCIÓN DERIVATIVA ( D ): Anticipación (utiliza la pendiente) Control
dinámico
Ley de Control: dt
tKdtu
de )()(
ie
oe
R
C
Donde: RCs
E
E
i
o
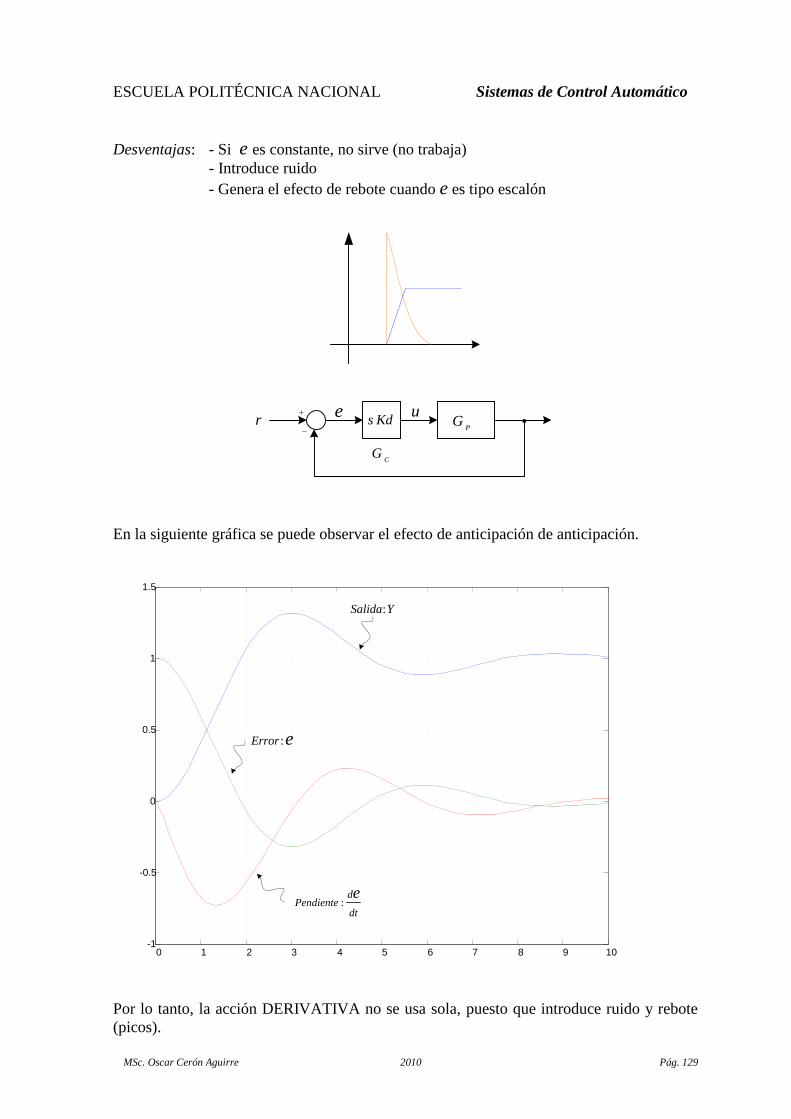
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 129
Desventajas: - Si e es constante, no sirve (no trabaja)
- Introduce ruido
- Genera el efecto de rebote cuando e es tipo escalón
r
e uP
G
CG
Kds
En la siguiente gráfica se puede observar el efecto de anticipación de anticipación.
0 1 2 3 4 5 6 7 8 9 10-1
-0.5
0
0.5
1
1.5
YSalida:
eError :
dt
dPendiente
e:
Por lo tanto, la acción DERIVATIVA no se usa sola, puesto que introduce ruido y rebote
(picos).
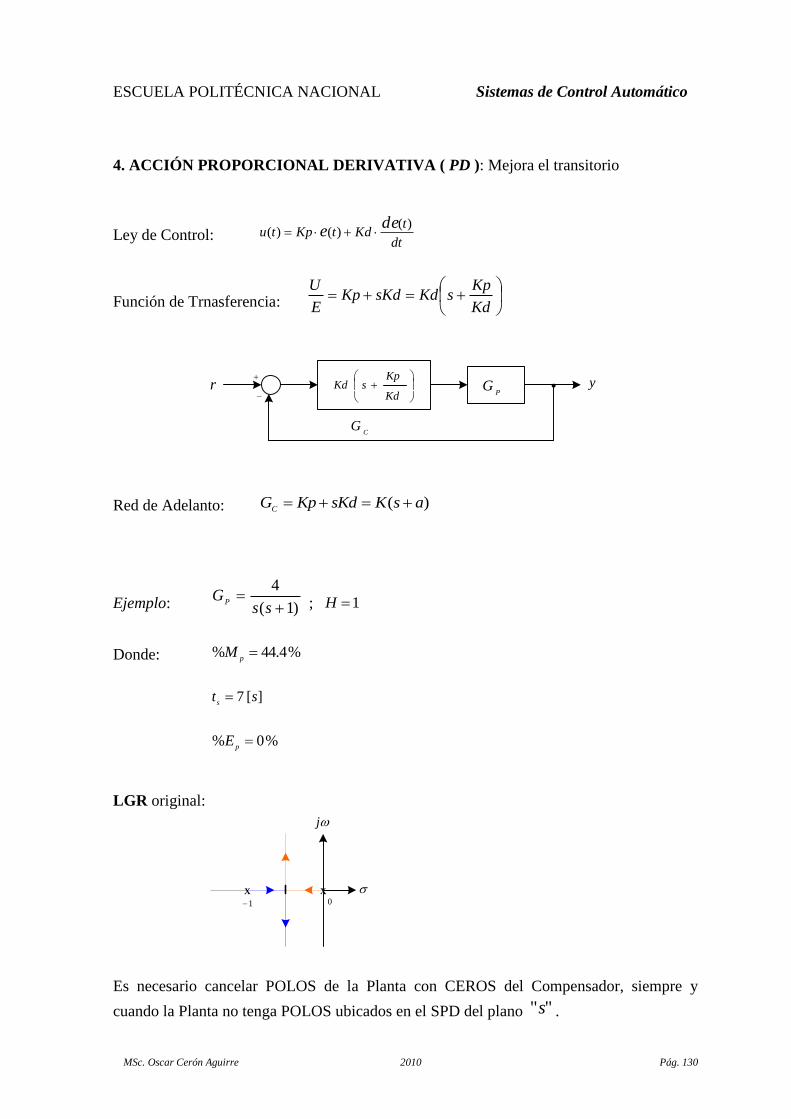
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 130
4. ACCIÓN PROPORCIONAL DERIVATIVA ( PD ): Mejora el transitorio
Ley de Control: dt
tKdtKptu
dee
)()()(
Función de Trnasferencia:
Kd
KpsKdsKdKp
E
U
r y
PG
CG
Kd
KpsKd
Red de Adelanto: )( asKsKdKpGC
Ejemplo: )1(
4
ssG
P ; 1H
Donde: %4.44% p
M
][7 sts
%0% p
E
LGR original:
j
X X
1 0
Es necesario cancelar POLOS de la Planta con CEROS del Compensador, siempre y
cuando la Planta no tenga POLOS ubicados en el SPD del plano ""s .
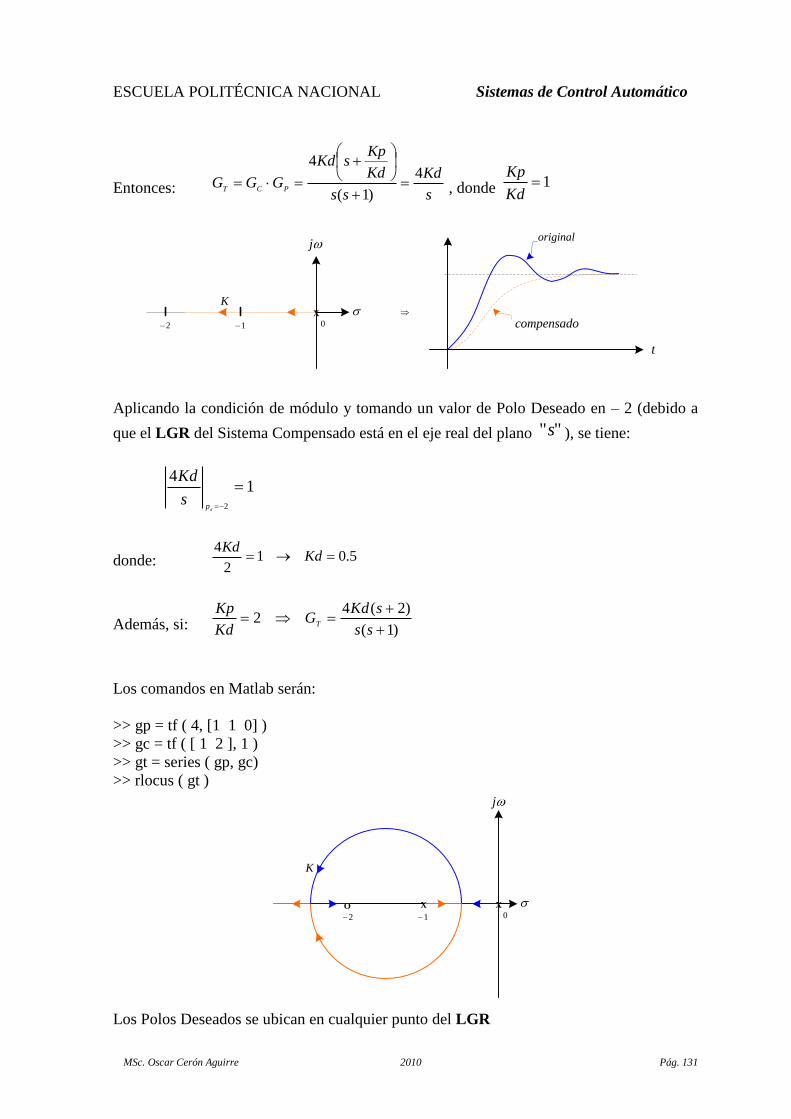
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 131
Entonces: s
Kd
ss
Kd
KpsKd
GGGPCT
4
)1(
4
, donde 1Kd
Kp
t
j
X
1 02
K
original
compensado
Aplicando la condición de módulo y tomando un valor de Polo Deseado en – 2 (debido a
que el LGR del Sistema Compensado está en el eje real del plano ""s ), se tiene:
14
2
dp
s
Kd
donde: 5.012
4 Kd
Kd
Además, si: )1(
)2(42
ss
sKdG
Kd
KpT
Los comandos en Matlab serán:
>> gp = tf ( 4, [1 1 0] )
>> gc = tf ( [ 1 2 ], 1 )
>> gt = series ( gp, gc)
>> rlocus ( gt )
j
XXO012
K
Los Polos Deseados se ubican en cualquier punto del LGR
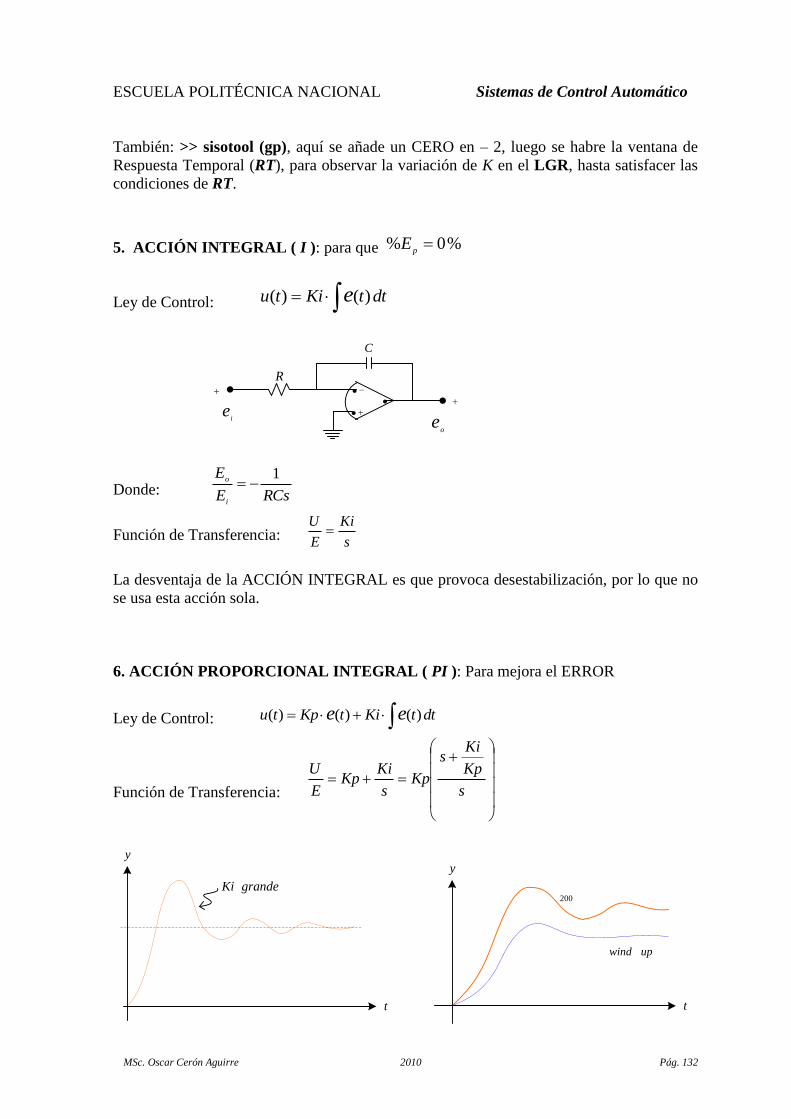
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 132
También: >> sisotool (gp), aquí se añade un CERO en – 2, luego se habre la ventana de
Respuesta Temporal (RT), para observar la variación de K en el LGR, hasta satisfacer las
condiciones de RT.
5. ACCIÓN INTEGRAL ( I ): para que %0% p
E
Ley de Control: dttKitu e )()(
ie
oe
R
C
Donde: RCsE
E
i
o 1
Función de Transferencia: s
Ki
E
U
La desventaja de la ACCIÓN INTEGRAL es que provoca desestabilización, por lo que no
se usa esta acción sola.
6. ACCIÓN PROPORCIONAL INTEGRAL ( PI ): Para mejora el ERROR
Ley de Control: dttKitKptu ee )()()(
Función de Transferencia:
s
Kp
Kis
Kps
KiKp
E
U
grandeKi
y
t
upwind
200
y
t
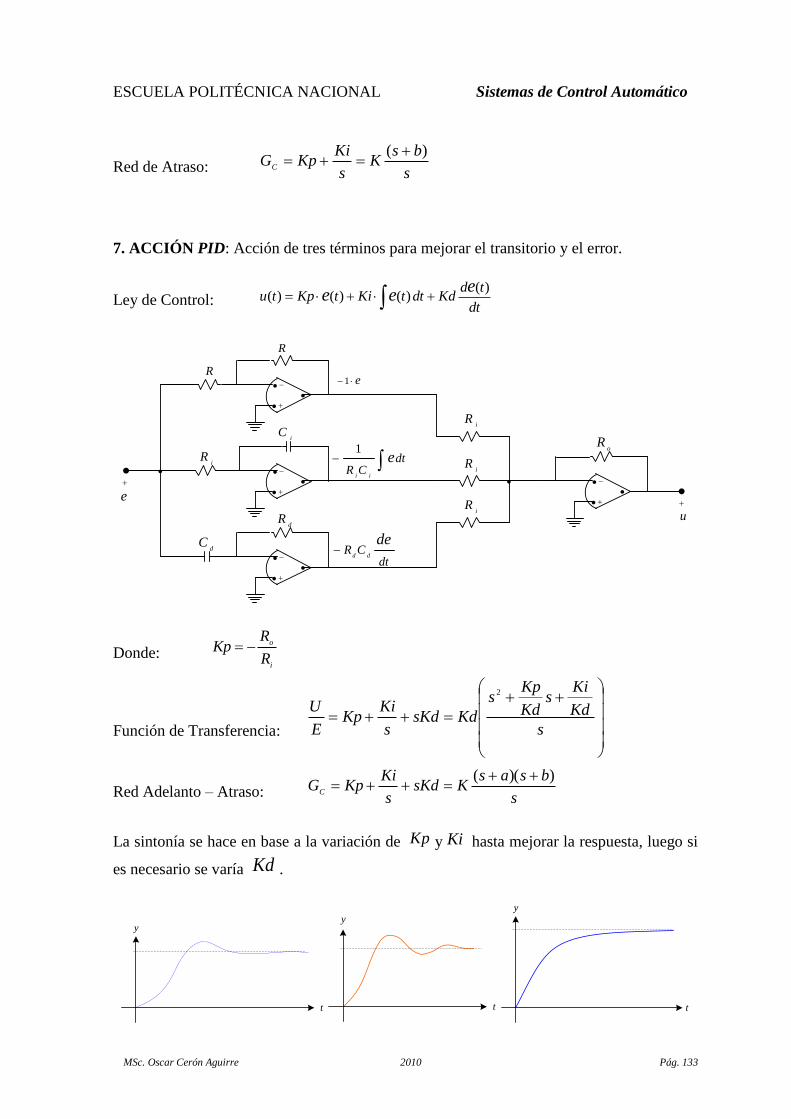
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 133
Red de Atraso: s
bsK
s
KiKpG
C
)(
7. ACCIÓN PID: Acción de tres términos para mejorar el transitorio y el error.
Ley de Control: dt
tdKddttKitKptu
eee
)()()()(
R
R
iR
dR
iC
dC
iR
iR
iR
oR
e1
dtCR
eii
1
dtCR
dedd
e
u
Donde: i
o
R
RKp
Función de Transferencia:
s
Kd
Kis
Kd
Kps
KdsKds
KiKp
E
U2
Red Adelanto – Atraso: s
bsasKsKd
s
KiKpG
C
))((
La sintonía se hace en base a la variación de Kp y Ki hasta mejorar la respuesta, luego si
es necesario se varía Kd .
y
t
y
t
y
t

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 134
Para Procesos Industriales se tiene:
dt
dKddtKiKpu
eee
dt
dTddt
TiKpu
eee
1
donde: Ti = tiempo de reset
Td = tiempo de anticipación
además: Ti
KpKi TdKpKd
KpBP
1 = banda propocional
Función de Transferencia:
sTd
sTiKp
E
U 11
- Banda Proporcional:
u
e][5 V
][10 V
%100
%100
0
1 pendienteKp
donde: Kpu
e
%1001001
Kp
BP
También: %501002
12
%50
%100 BPpendiente
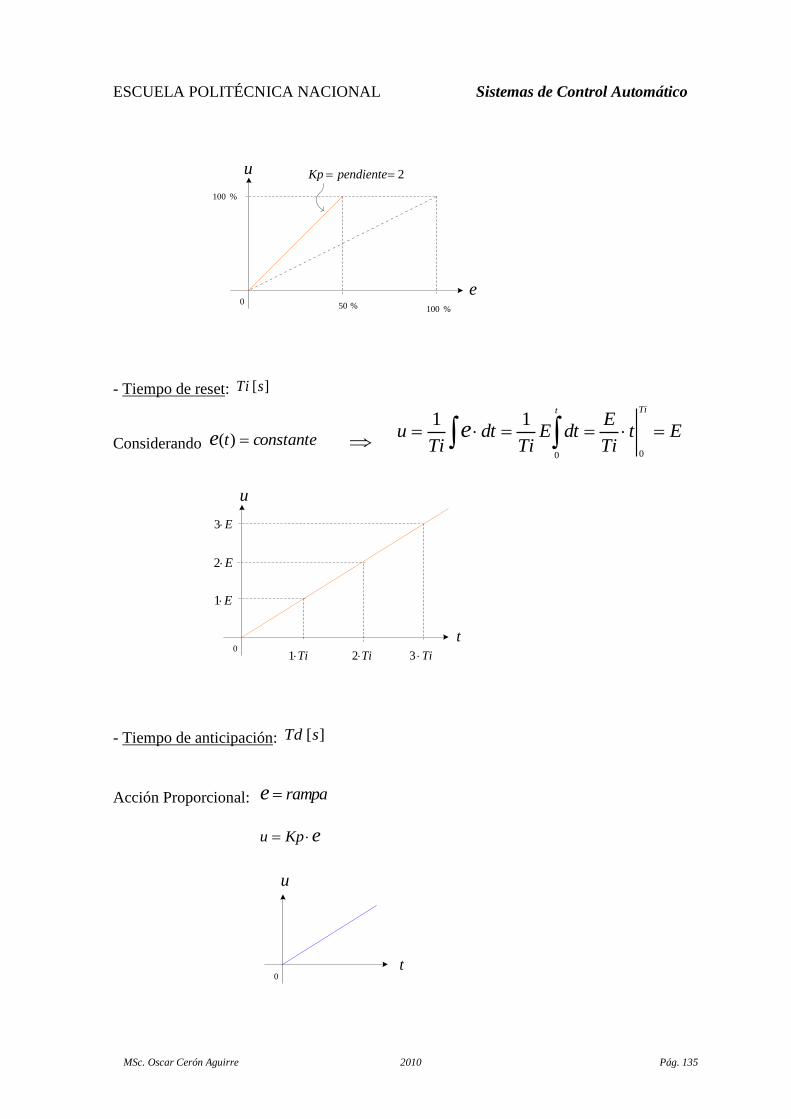
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 135
u
e%100
%100
0
2 pendienteKp
%50
- Tiempo de reset: ][sTi
Considerando constantete )( Et
Ti
EdtE
Tidt
Tiu
Tit
e 00
11
u
0
t
Ti1 Ti2 Ti3
E1
E2
E3
- Tiempo de anticipación: ][sTd
Acción Proporcional: rampae
eKpu
u
0t
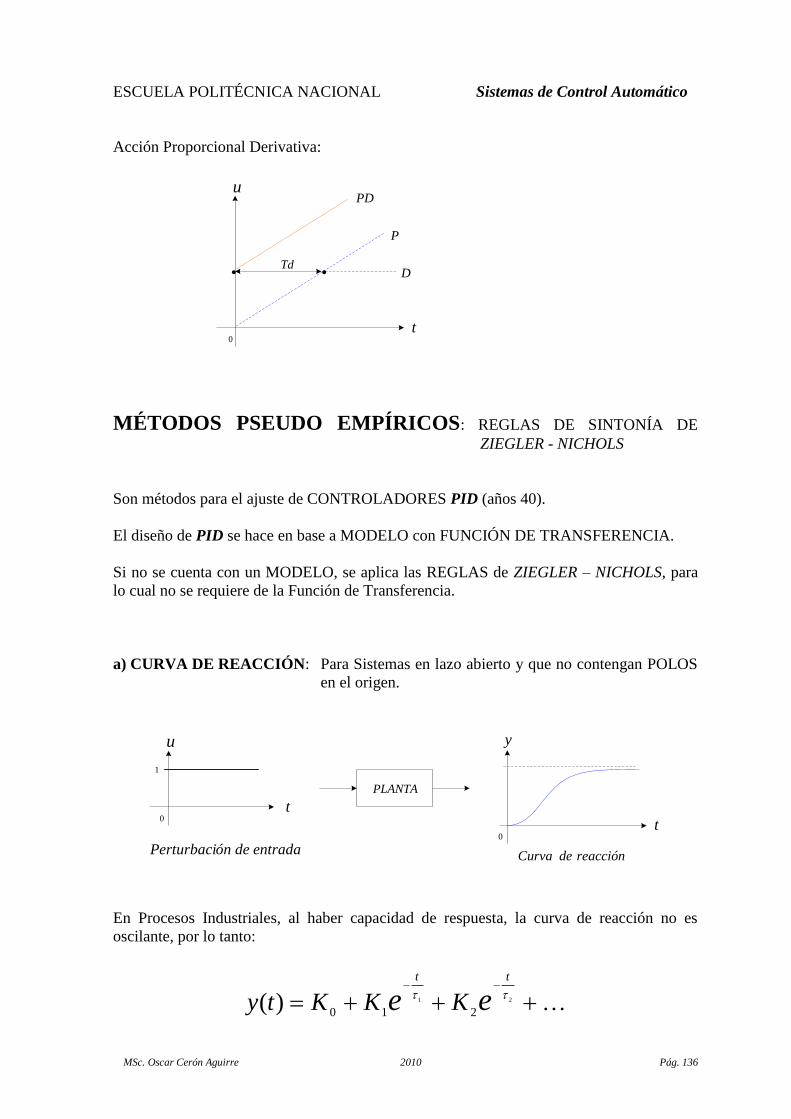
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 136
Acción Proporcional Derivativa:
u
0t
PD
P
DTd
MÉTODOS PSEUDO EMPÍRICOS: REGLAS DE SINTONÍA DE
ZIEGLER - NICHOLS
Son métodos para el ajuste de CONTROLADORES PID (años 40).
El diseño de PID se hace en base a MODELO con FUNCIÓN DE TRANSFERENCIA.
Si no se cuenta con un MODELO, se aplica las REGLAS de ZIEGLER – NICHOLS, para
lo cual no se requiere de la Función de Transferencia.
a) CURVA DE REACCIÓN: Para Sistemas en lazo abierto y que no contengan POLOS
en el origen.
u
0t
0t
y
1
PLANTA
reaccióndeCurvaentradadeónPerturbaci
En Procesos Industriales, al haber capacidad de respuesta, la curva de reacción no es
oscilante, por lo tanto:
21
210)(
tt
ee KKKty
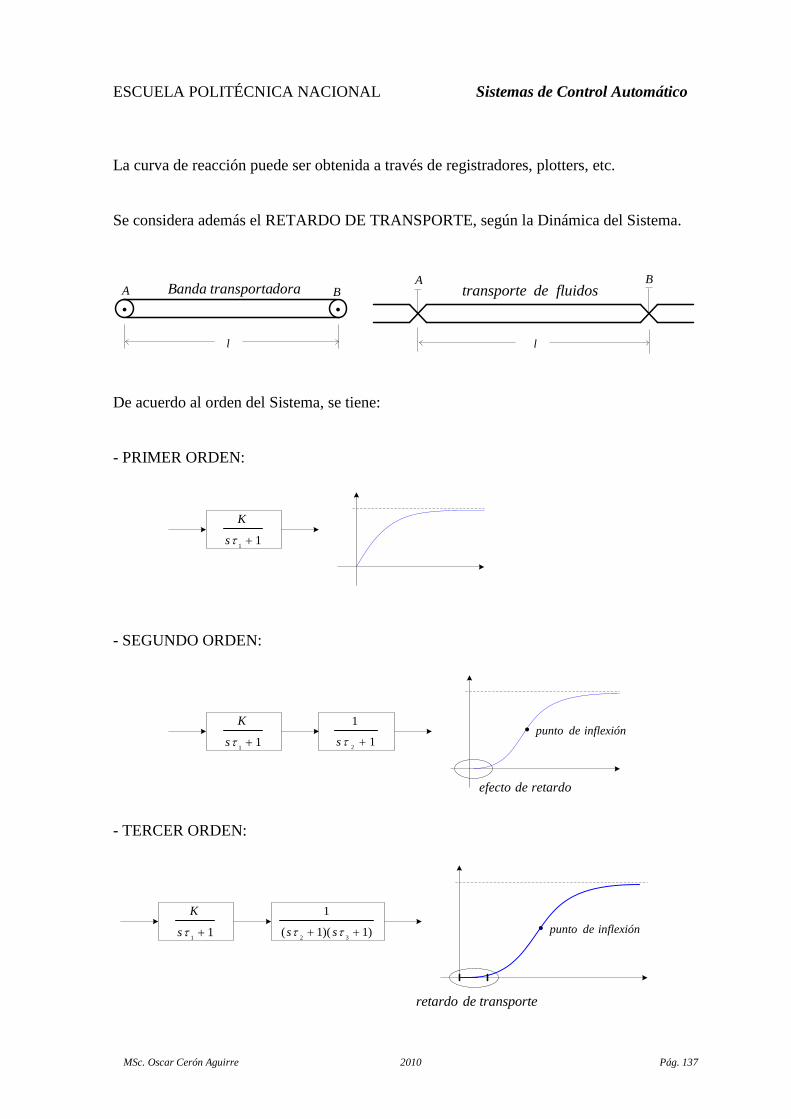
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 137
La curva de reacción puede ser obtenida a través de registradores, plotters, etc.
Se considera además el RETARDO DE TRANSPORTE, según la Dinámica del Sistema.
l
A BdoratransportaBanda
l
A Bfluidosdetransporte
De acuerdo al orden del Sistema, se tiene:
- PRIMER ORDEN:
11s
K
- SEGUNDO ORDEN:
1
1
2s1
1s
K inflexióndepunto
retardodeefecto
- TERCER ORDEN:
11s
K
inflexióndepunto)1)(1(
1
32 ss
transportederetardo
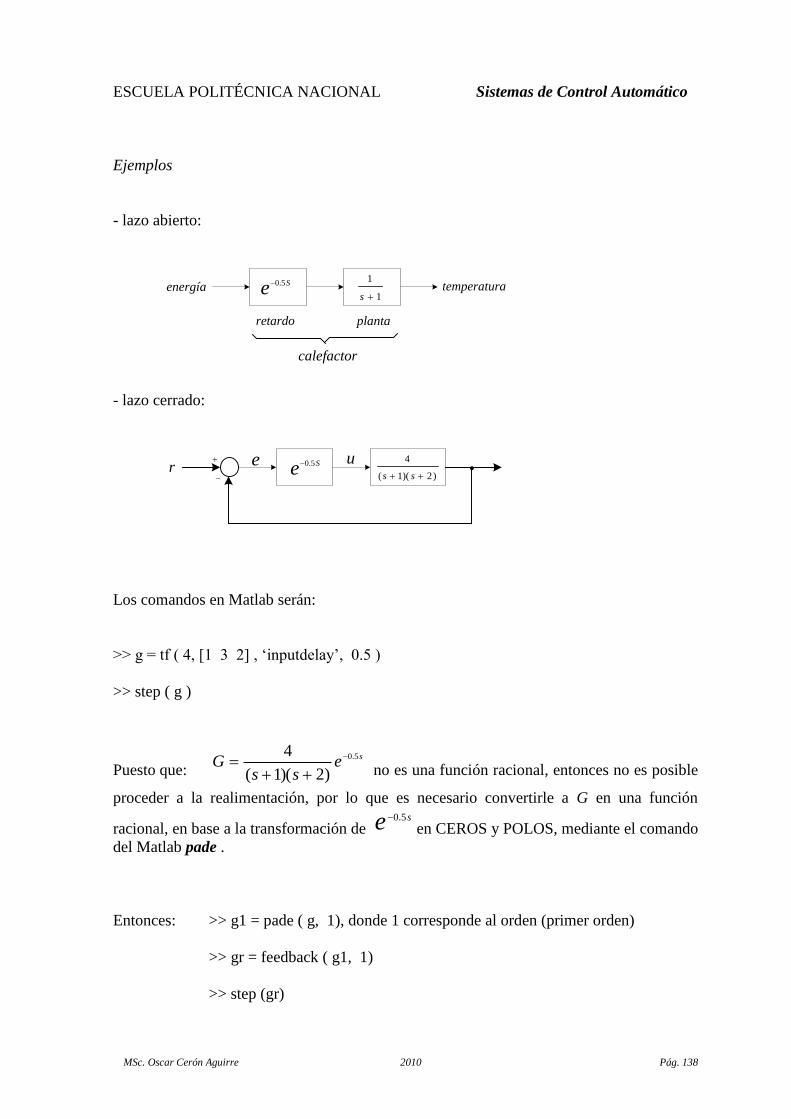
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 138
Ejemplos
- lazo abierto:
Se 5.0
1
1
s
plantaretardo
calefactor
energía atemperatur
- lazo cerrado:
Se 5.0
)2)(1(
4
ss
u
r e
Los comandos en Matlab serán:
>> g = tf ( 4, [1 3 2] , ‘inputdelay’, 0.5 )
>> step ( g )
Puesto que: se
ssG 5.0
)2)(1(
4
no es una función racional, entonces no es posible
proceder a la realimentación, por lo que es necesario convertirle a G en una función
racional, en base a la transformación de se 5.0
en CEROS y POLOS, mediante el comando
del Matlab pade .
Entonces: >> g1 = pade ( g, 1), donde 1 corresponde al orden (primer orden)
>> gr = feedback ( g1, 1)
>> step (gr)
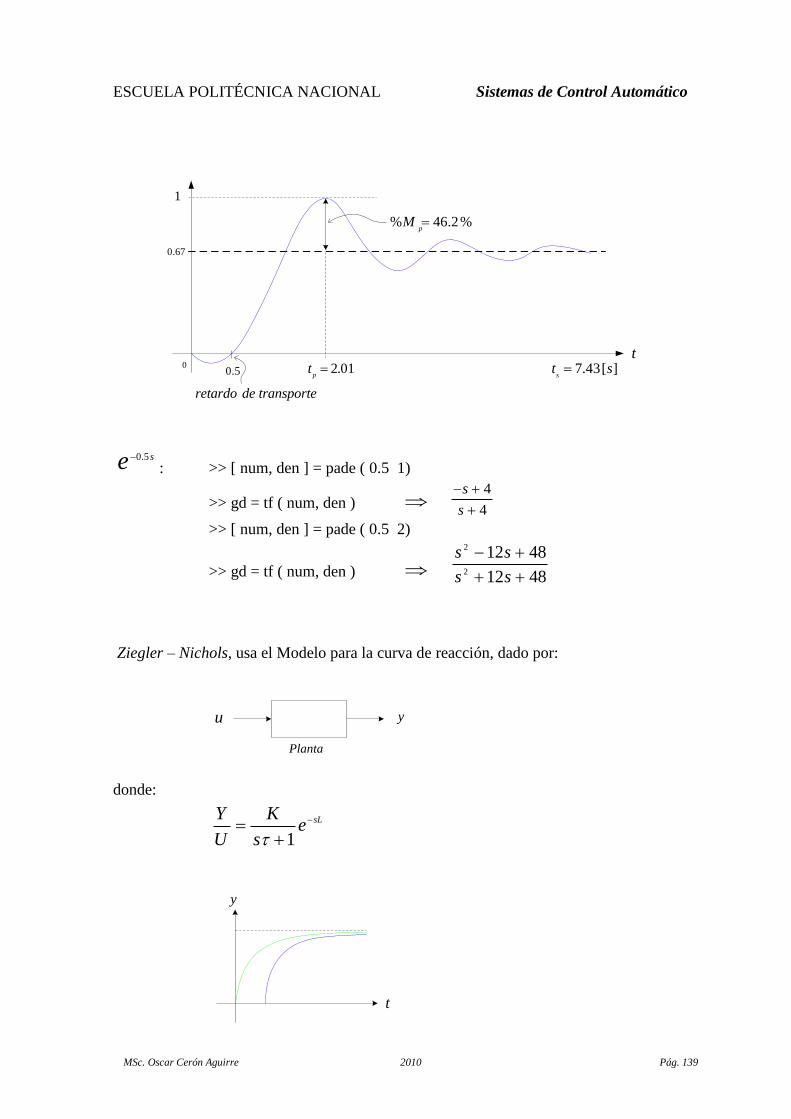
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 139
67.0
01.2p
t ][43.7 sts0
5.0
%2.46% p
M
1
t
transportederetardo
se 5.0
: >> [ num, den ] = pade ( 0.5 1)
>> gd = tf ( num, den ) 4
4
s
s
>> [ num, den ] = pade ( 0.5 2)
>> gd = tf ( num, den ) 4812
48122
2
ss
ss
Ziegler – Nichols, usa el Modelo para la curva de reacción, dado por:
Planta
u y
donde:
sLe
s
K
U
Y
1
y
t
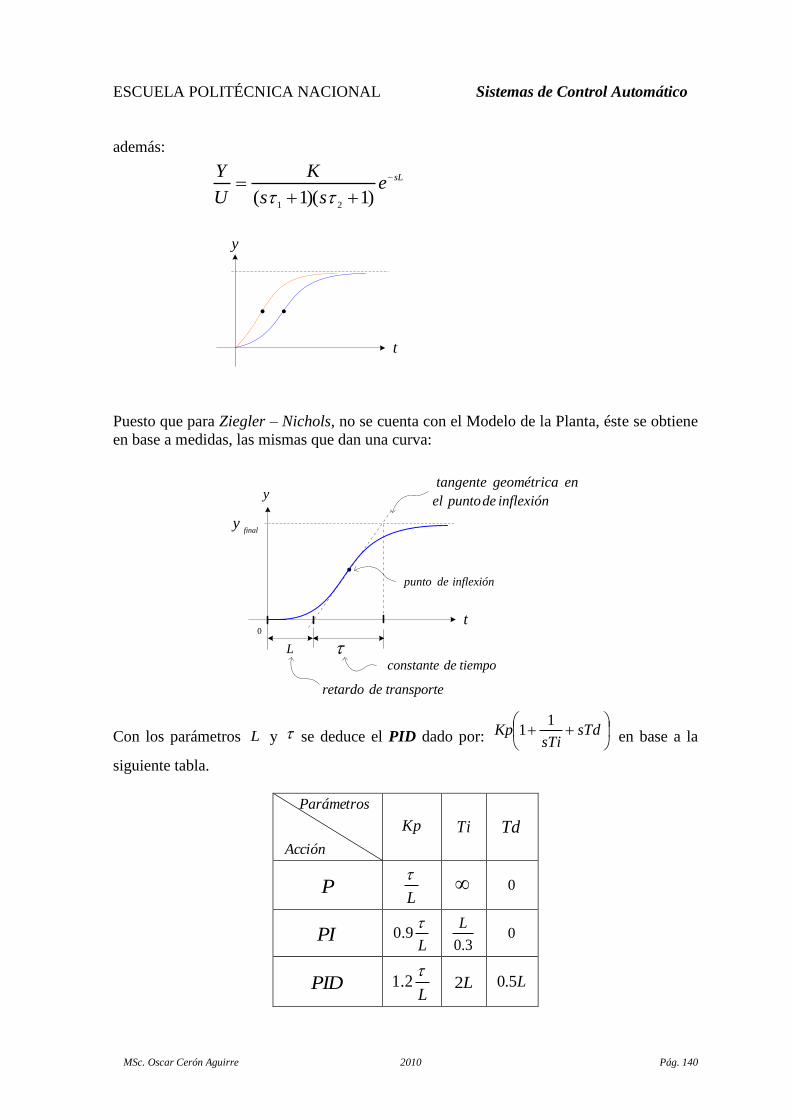
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 140
además:
sLess
K
U
Y
)1)(1(21
t
y
Puesto que para Ziegler – Nichols, no se cuenta con el Modelo de la Planta, éste se obtiene
en base a medidas, las mismas que dan una curva:
inflexióndepunto
L tiempodeconstante
transportederetardo
inflexióndepuntoel
engeométricatangentey
t
finaly
0
Con los parámetros L y se deduce el PID dado por:
sTd
sTiKp
11 en base a la
siguiente tabla.
Acción
Parámetros
Kp Ti Td
P L
0
PI L
9.0 3.0
L 0
PID L
2.1
L2 L5.0

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 141
Ejemplo: En base a la curva de reacción de la Planta )2)(1(
4
ss, obtener los parámetros
L y para un Compensador PID según Ziegler – Nichols.
yu
r e
sTd
sTiKp
11 )2)(1(
4
ss
CG P
G
>> gp = tf ( 4, [ 1 3 2 ] )
>> step ( gp )
y
t0
15.0 15.2
Entonces, considerando un PID, de acuerdo a los valores de la tabla de Ziegler – Nichols,
se tiene:
1615.0
22.12.1
LKp
3.015.022 LTi
075.015.05.05.0 LTd
Por lo tanto:
s
sG
C075.0
3.0
1116
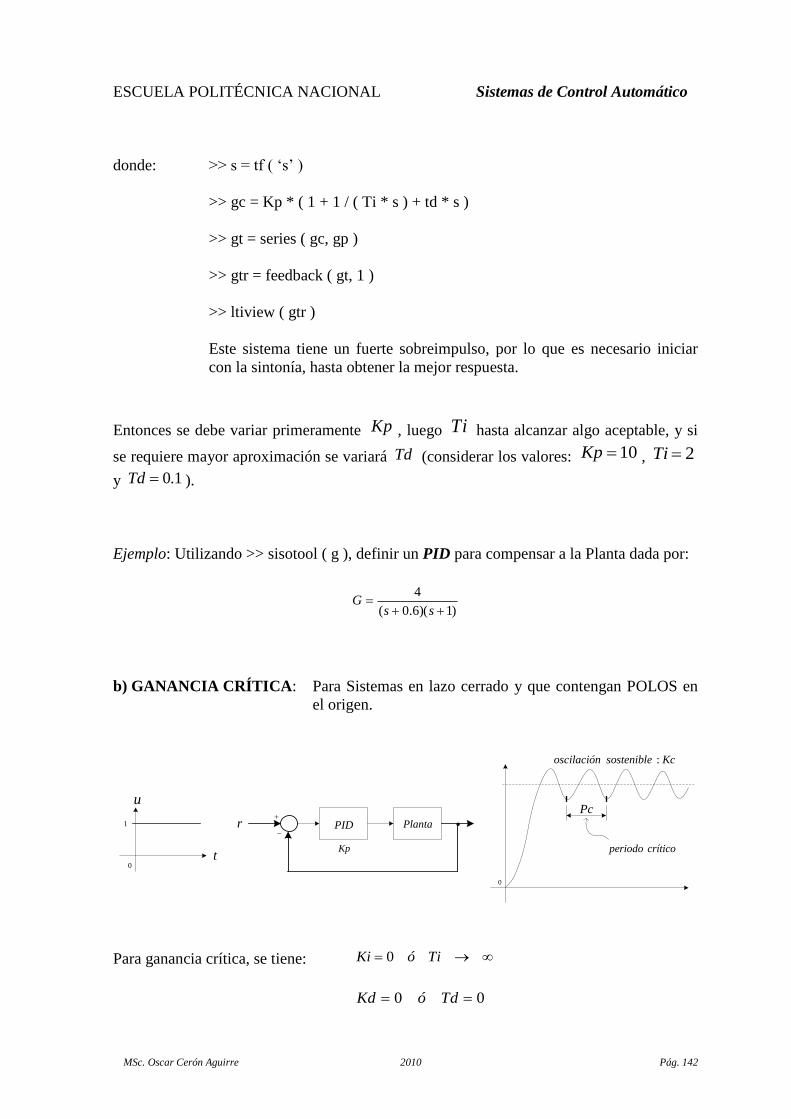
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 142
donde: >> s = tf ( ‘s’ )
>> gc = Kp * ( 1 + 1 / ( Ti * s ) + td * s )
>> gt = series ( gc, gp )
>> gtr = feedback ( gt, 1 )
>> ltiview ( gtr )
Este sistema tiene un fuerte sobreimpulso, por lo que es necesario iniciar
con la sintonía, hasta obtener la mejor respuesta.
Entonces se debe variar primeramente Kp , luego Ti hasta alcanzar algo aceptable, y si
se requiere mayor aproximación se variará Td (considerar los valores: 10Kp , 2Ti
y 1.0Td ).
Ejemplo: Utilizando >> sisotool ( g ), definir un PID para compensar a la Planta dada por:
)1)(6.0(
4
ssG
b) GANANCIA CRÍTICA: Para Sistemas en lazo cerrado y que contengan POLOS en
el origen.
u
0t
1
r PID Planta
Kp
0
críticoperiodo
Pc
Kcsostenibleoscilación :
Para ganancia crítica, se tiene: TióKi 0
00 TdóKd
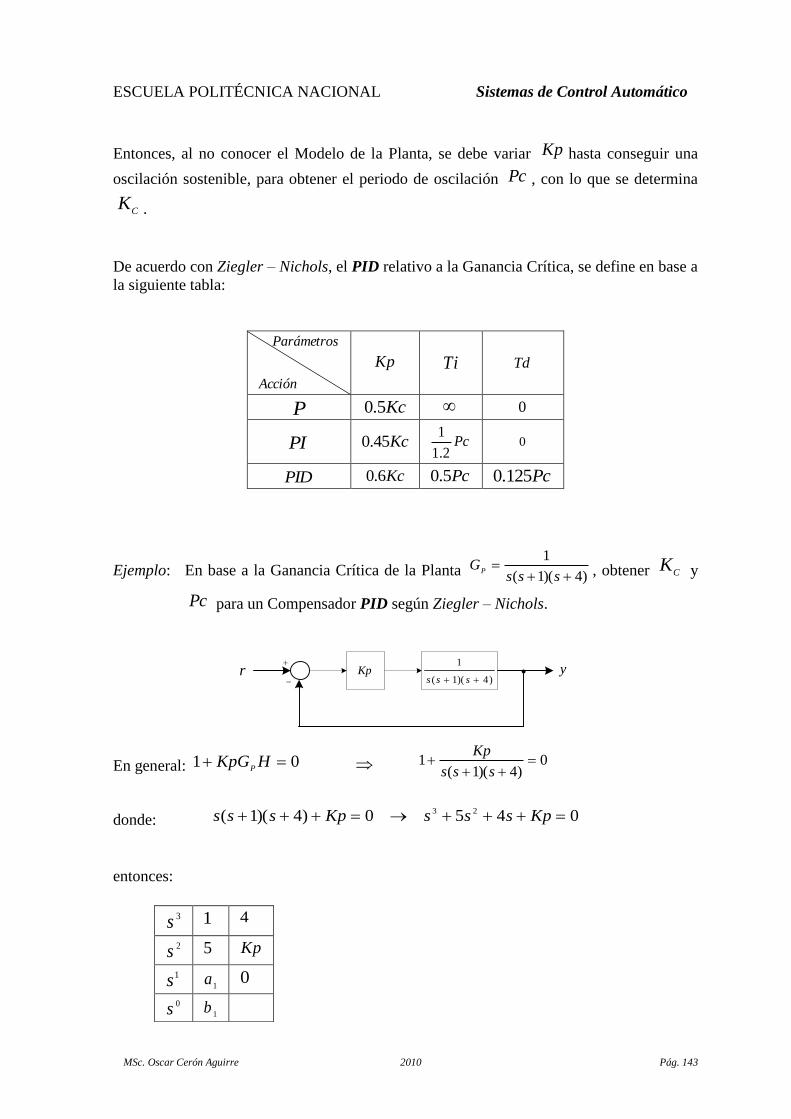
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 143
Entonces, al no conocer el Modelo de la Planta, se debe variar Kp hasta conseguir una
oscilación sostenible, para obtener el periodo de oscilación Pc , con lo que se determina
CK .
De acuerdo con Ziegler – Nichols, el PID relativo a la Ganancia Crítica, se define en base a
la siguiente tabla:
Acción
Parámetros
Kp Ti Td
P Kc5.0 0
PI Kc45.0 Pc2.1
1 0
PID Kc6.0 Pc5.0 Pc125.0
Ejemplo: En base a la Ganancia Crítica de la Planta )4)(1(
1
sssG
P , obtener CK y
Pc para un Compensador PID según Ziegler – Nichols.
y
r Kp
)4)(1(
1
sss
En general: 01 HKpGP 0
)4)(1(1
sss
Kp
donde: 0450)4)(1( 23 KpsssKpsss
entonces:
3s 1 4
2s 5 Kp
1s 1a 0
0s 1b

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 144
donde: 2005
20
5
451
KpKpKp
a
01
Kpb
por lo que: 20200 KcKp
además: 225
052,1
2 cjKc
jsKcs
para lo cual:
cPc
Pcc
22
El Compensador PID de acuerdo con los datos de la tabla de Ziegler – Nichols, viene dado
por:
12206.06.0 KcKp
57.15.05.0 PcTi
39.0125.0125.0 PcTd
Por lo tanto:
s
sG
C39.0
57.1
1112
Debe procederse a realimentar al conjunto PCGG para el Análisis del Sistema, luego de
lo cual se realizará la sintonía, en el orden Kp , luego Ti y finalmente Td .
En la práctica se debe ir variando Kp hasta obtener la oscilación sostenible.
>> g1 = Kc * g
>> g1r = feedback ( g1, 1 )
>> ltiview ( g1r )
Al variar Kp se va observando hasta que se tenga una oscilación sostenible, con lo
que se define CK , luego se mide el periodo correspondiente a C
K ( Pc ).

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 145
Ejemplo: Utilizando >> sisotool ( g ), definir un PID para compensar a la Planta dada por:
)3)(2)(1(
4
sssG
P
Donde: 6116
423
sss
GP
>> gp = tf ( 4, [ 1 6 11 6 ] )
>> gpr = feedback ( gp, 1 )
>> ltiview ( gpr )
Análisis: %8.4% p
M
][97.3%)2( sts
%60% Ep
El Sistema no oscila en forma sostenible, por lo que:
>> sisotool ( gp) aquí se observa el LGR donde se determina CK .
Se abre la ventana [Analysis, Response to step command] para medir el periodo Pc .
Según SISOTOOL se tiene )]([3.14 sCKc , a cuyo valor le corresponde un periodo de
oscilación 92.109.201.4 Pc .
Por lo tanto, el Sistema original (Planta) tiene un transitorio aceptable, por lo que se
requiere únicamente una acción PI.
Entonces: 435.63.1445.045.0 KcKp
6.192.12.1
1
2.1
1 PcTi
0Td

ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático
MSc. Oscar Cerón Aguirre 2010 Pág. 146
donde : >> s = tf ( ‘s’ )
>> gc = Kp * ( 1 + 1 / ( Ti * s ) )
>> gt = series ( gc, gp )
>> gtr = feedback ( gt, 1 )
>> ltiview ( gtr )
Se tiene demasiado sobreimpulso (60 %) y oscilación, por lo que se debe
iniciar la sintonía variando primeramente Kp , luego Ti y finalmente
Td ( considerar los valores: 8Kp , 6Ti y 1Td ).
Ejemplo: Utilizando >> sisotool ( g ), definir un PID para compensar a la Planta dada por:
)52)(1(
42
sss
G
Donde: >> g1 = tf ( 4, [ 1 3 7 5 ] )
>> g1r = feedback ( g1, 1 )
>> ltiview ( g1r ) 4.22.126.141644 PcKc
PID: 6.96.0 KcKp 2.15.0 PcTi 3.0125.0 PcTd
Considerar valores de: 8.05.2,5.3 TdyTiKp