comparativo dinÂmico entre bicicletas de …conemi.org.br/download/tt21_xiv_conemi-002.pdf · do...
TRANSCRIPT

Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
COMPARATIVO DINÂMICO ENTRE BICICLETAS DE MOUNTAIN B IKE HARDTAIL
Macclarck Pessoa Nery (1) ([email protected]), Leonardo Maia Nogueira (1) ([email protected]), José Aguiar dos Santos Junior (1) ([email protected]), Jaqueline Dias Altidis (1)
(1) Universidade Federal de Sergipe (UFS) ; Departamento de Engenharia Mecânica
RESUMO: Esse trabalho teve como objetivo verificar de maneira teórica o comportamento dinâmico de três bicicletas de mountain bike encontradas em Aracaju. A metodologia consistiu em uma revisão bibliográfica da história das bicicletas, seus diferentes tipos e no comportamento dinâmico de veículo de duas rodas, posteriormente, a escolha das bicicletas, modelagem computacional do conjunto ciclista e piloto, a aplicação de uma rotina para obtenção do desempenho destas na realização de curvas e o gasto energético para manter uma dada velocidade por serem parâmetros importantes no uso off-road. Após a modelagem e execução da rotina de cálculo observou-se que a comparação teórica não pôde determinar uma bicicleta vencedora do comparativo, sendo necessários testes práticos para determinar a melhor bicicleta para o esporte. PALAVRAS-CHAVE: dinâmica, mountain-bike, comparativo, Aracaju.
COMPARATIVE DYNAMIC BETWEEN BICYCLES MOUNTAIN BIKE HARDTAIL ABSTRACT: This study aimed to verify the theoretical way the dynamic behavior of three bikes mountain bike found in Aracaju. The methodology consisted of a literature review of the history of bicycles, their different types and the dynamic behavior of two-wheeled vehicle, later, the choice of bike, rider and computational modeling of the pilot set, the application of a routine for obtaining the performance of these the realization of curves and energy expenditure to maintain a given speed to be important parameters in off-road use. After the modeling and execution of the routine calculation it was observed that the theoretical comparison could not determine a winning bike comparison, being necessary practical tests to determine the best bike for the sport. KEYWORDS: dynamics, mountain bike, comparative, Aracaju

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 2
1. INTRODUÇÃO
Os primeiros estudos sobre comportamento dinâmico de veículos de duas rodas surgiram no
século XIX após estudiosos e projetistas começarem a se familiarizar com o novo veículo recém-
inventado, a bicicleta. Não demorou muito a surgirem competições transformando o veículo em
esporte. Por ser um veículo de funcionamento simples, usuários realizavam adaptações e a partir de
uma destas adaptações surgiu nos Estados Unidos em meados do século XX, o mountain bike.
As bicicletas de mountain bike surgiram a partir da inserção de pneus mais largos, um conjunto
maior de engrenagens na transmissão e mudanças na direção a fim de adaptar o veículo a andar no
fora de estrada. Com o passar dos anos novas mudanças foram incorporadas dividindo estes veículos
em dois grandes grupos. Hardtail: bicicletas de moutain bike apenas com suspensão dianteira e as
Full-Suspension: bicicletas com dupla suspensão.
Conhecendo a história da bicicleta, os seus diversos tipos e as equações que regem o
comportamento teórico dinâmico executou-se um comparativo dinâmico teórico de bicicletas de
mountain bike do tipo hardtail encontradas no mercado de Aracaju.
1.1 Revisão Bibliográfica
O primeiro veículo de duas rodas, com sistema de mudança de direção foi inventado na antiga
Prússia (Alemanha) em 1817 e recebeu o nome de Draisiana, em homenagem ao seu inventor, o Barão
Von Drais. Tendo a madeira como seu principal material construtivo, porém a sua explosão de vendas
só viria mais tarde com invenção dos pedais por Pierre Michaux no ano de 1865, Bustus (2006).
Seguindo a evolução histórica da bicicleta, Figura 1. Em 1870 surgem as “penny farthings”,
bicicletas com uma roda grande na dianteira e outra menor atrás, onde os pedais eram montados
diretamente na roda dianteira que possuía um grande diâmetro, atingindo assim grandes distâncias e
altas velocidades no plano. No final do século XIX surge o quadro trapezoidal, ou diamante, sendo
até hoje a base geométrica de qualquer bicicleta. Na década de 50 surgem as primeiras modificações
em bicicletas para o uso fora de estrada. Mas só na década de 70 surge a primeira bicicleta de
mountain bike comercial. Posteriormente surge a primeira bicicleta full-suspension com sistema de
amortecimento na dianteira e traseira da bicicleta em 1990, Silva (2010).
Segundo Pequini, (2005). Atualmente existem diferentes tipos de bicicletas, sejam elas
utilizadas para passeio, mobilidade urbana, prática de esportes em estradas ou fora delas, diferentes
materiais aplicados em sua construção, diferentes tipos de suspensão, e ainda métodos específicos
para a obtenção da bicicleta adequada ao corpo do ciclista como o “bike fit”, conjunto de ações de
ajustes e medidas que regulam a bicicleta da melhor forma para o usuário.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 3
FIGURA 1. Evolução histórica das bicicletas.
Existem cinco tipos de bicicletas, são eles: a) speed ou road bikes, que são bicicletas
extremamente leves normalmente construídas em fibra de carbono, utilizadas em competições de
triathlon, e corridas em estradas, como a famosa volta da França, b) bicicletas de bmx, utilizadas na
prática do esporte de mesmo nome, c) mountain bikes, que são as bicicletas utilizadas para a prática
do esporte fora de estrada, d) bicicletas de passeio, e) bicicletas infantis.
1.1.1 Mountain Bike
As mountain bikes foram o último tipo de bicicleta a se desenvolver, segundo Wilson e
Papadopoulos (2004) esse tipo de bicicleta provocou uma explosão de vendas, porém o que se viu foi
um enorme aumento dessas bicicletas na rua e não na prática do esporte. Estas bicicletas se dividem
em dois subtipos: hardtail e full-suspension As bicicletas Hardtail possuem apenas a suspensão
dianteira, custo mais acessível e são mais rígidas permitindo melhor controle nas arrancadas, Figura
2.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 4
FIGURA 2. Bicicleta mountain bike hardtail.
Já as bicicletas Full-Suspension, Figura 3, são mais confortáveis, e mais recomendadas para
alguns tipos de competição, como o down-hill, tipo de competição muito popular, com provas como
a “Descida das escadas de Santos”.
FIGURA 3. Bicicleta mountain bike full-suspension.
Quando o fabricante desenvolve uma nova bicicleta, ele utiliza as ferramentas de engenharia
de produto, executando a análise do mercado, a finalidade, os requisitos que a mesma deve ter, etc.,
e decide se será um projeto novo, ou adaptação de um já existente, mudando alguns ou todos
componentes. Ballantine (2000). No desenvolvimento do projeto inicialmente são usadas ferramentas
computacionais de desenho e de simulação. E no presente trabalho estas ferramentas foram utilizadas
para escolher a melhor opção de compra.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 5
1.1.2 Dinâmica de Bicicletas
A ciência do movimento dos veículos de duas rodas (bicicletas e motos) é a dinâmica deles
devido as forças que agem sobre os mesmos. Os movimentos de interesse são: o equilíbrio, a direção,
suspensão, frenagem, etc. Bicicletas e motos são veículos que andam sobre uma linha e assim os seus
movimentos tem muitos atributos fundamentais em comum. Wilson e Papadopoulos (2004).
Experimentos e análises matemáticas tem mostrado que uma bicicleta permanece na posição
vertical quando mantém o seu centro de massa sobre as rodas. Vários são os fatores que contribuem
para esta estabilidade. A bicicleta deve inclinar-se a fim de manter o equilíbrio em uma curva, quanto
maior a velocidade ou menor o raio da curva, isso equilibra o torque do contato da roda como chão e
a força centrífuga gerada pela ação da gravidade. Algumas variáveis da dinâmica são:
a) O balanço: uma bicicleta permanece em pé quando em movimento devido ao equilíbrio
entre todas as forças, externas e internas, a direção pode ser dada pela mudança da mesma no guidom,
ou sem certas circunstancias pelo veículo em si. A estabilidade é gerada por uma combinação de
vários efeitos que dependem da geometria, a distribuição de massa e a velocidade a frente da bicicleta.
Pneus, suspensão, amortecedores de direção e a rigidez do quadro também podem influenciar. Em
altas velocidades, pequenas mudanças, pequenas mudanças na direção provocam movimentos
rápidos, já a baixa velocidades são necessárias grandes mudanças na direção para se obter o mesmo
resultado. Por isso é mais fácil manter o equilíbrio em altas velocidades.
b) Localização do centro de massa: o parâmetro mais influente no comportamento do
veículo durante a execução das curvas é a sua altura do centro de massa combinada com a do piloto.
Quando o centro de massa é o mais próximo da roda dianteira, menos a roda dianteira tem que se
mover lateralmente para manter o equilíbrio, quanto mais próximo da roda traseira, ocorrera o
inverso, serão necessários maiores movimentos laterais. A bicicleta será mais facilmente controlada
se a massa sobre a roda dianteira for maior do que a sobre a roda traseira. De acordo com Wilson e
Papadopoulos (2004) uma roda dianteira mais pesada e com mais trail irá exercer uma influência
estabilizadora.
c) Trail: segundo Foale (2002) a primeira função do trail é construir uma estabilidade na
direção e tem grande influência sobre a inclinação nas curvas, pois devido a ele se origina o efeito
das rodas voltarem ao centro após uma mudança de direção. É o fator que influencia o quão fácil ou
difícil uma bicicleta será de andar em linha. Existem dois tipos de trail , o real e o mecânico, como
mostrado na Figura 4. O trail mais comumente usado é o trail mecânico que é a distância
perpendicular a linha do eixo de direção que toca o ponto de contato da linha de centro da roda
dianteira com o chão.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 6
FIGURA 4. Parametros geométricos da bicicleta
O Trail é uma função do ângulo de caster, e do rake, e do tamanho da roda também. Os valores
de trail em excesso pode dificultar o controle da bicicleta, com valor negativo tornam a condução
instável, A configuração comum das bicicletas, faz com que a roda tenha a tendência de girar para o
lado que a bicicleta inclina, normalmente as bicicletas speed possuem um valor maior para o trail do
que as mountain bikes, no caso desta um menor valor desse parâmetro permite uma seleção mais
precisa do caminho permitindo que o piloto se recupere mais facilmente dos impactos na roda
dianteira.
d) Distância entre eixos: é a distância horizontal entre os centros das rodas, influencia do raio de curva, sendo inversamente proporcional a distância entre-eixos.
e) Head angle e ângulo de caster: São dois ângulos complementares medidos entre a linha do eixo de direção da bicicleta e a linha de centro da roda dianteira. São importantes para verificar se a bicicleta tem estabilidade durante a execução de uma curva. Figura 5.
FIGURA 5. Head angle e ângulo de caster.
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 7
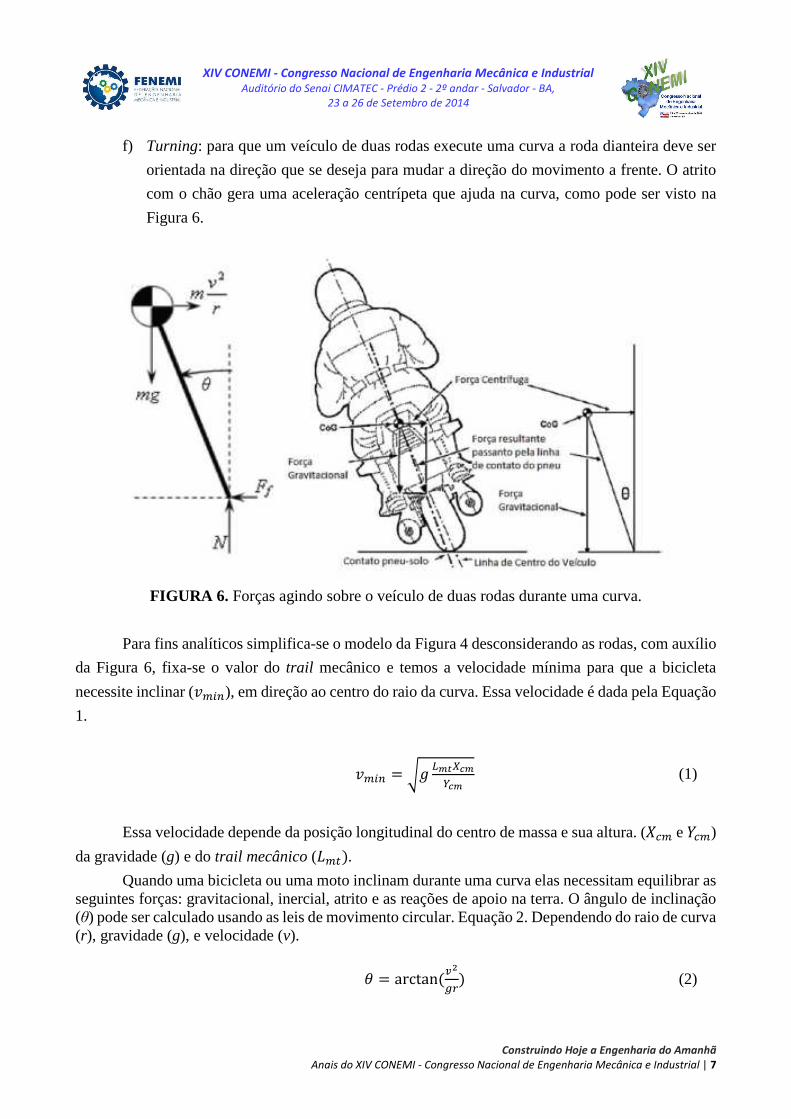
f) Turning: para que um veículo de duas rodas execute uma curva a roda dianteira deve ser
orientada na direção que se deseja para mudar a direção do movimento a frente. O atrito
com o chão gera uma aceleração centrípeta que ajuda na curva, como pode ser visto na
Figura 6.
FIGURA 6. Forças agindo sobre o veículo de duas rodas durante uma curva.
Para fins analíticos simplifica-se o modelo da Figura 4 desconsiderando as rodas, com auxílio
da Figura 6, fixa-se o valor do trail mecânico e temos a velocidade mínima para que a bicicleta
necessite inclinar (����), em direção ao centro do raio da curva. Essa velocidade é dada pela Equação
1.
���� = �� ��� � (1)
Essa velocidade depende da posição longitudinal do centro de massa e sua altura. (��� e ���)
da gravidade (g) e do trail mecânico (���). Quando uma bicicleta ou uma moto inclinam durante uma curva elas necessitam equilibrar as
seguintes forças: gravitacional, inercial, atrito e as reações de apoio na terra. O ângulo de inclinação (θ) pode ser calculado usando as leis de movimento circular. Equação 2. Dependendo do raio de curva (r), gravidade (g), e velocidade (v).
� = arctan(����) (2)

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 8
Segundo os estudos de Cossalter (2006) quando a bicicleta inclina desgasta a parte lateral do pneu, a largura dos pneus altera o ângulo de inclinação real descrito anteriormente. O ângulo de inclinação aumenta com a largura do pneu e diminui com a elevação da altura do centro de massa. Motos e bicicletas com pneus largos e baixo centro de massa inclinam mais do que as mesmas que possuem pneus finos e centro de massa elevado, em uma curva para uma mesma velocidade.
A largura do pneu é dada por (2t). A partir desse desgaste temos o ângulo corrigido influenciado pela largura do pneu, altura do centro de massa (���). O ângulo corrigido (θc) é dado então a partir do ângulo de inclinação ideal (θ), dado pela Equação 3.
� = � + "# $%&(' ()�* �+�) (3)
Rearrumando a Equação 3, temos o raio de curvatura (r) em função do ângulo de inclinação
da bicicleta, corrigido pelo desgaste lateral do pneu (θc). Temos a Equação 4 para o raio de curva em função do ângulo de inclinação.
# = �²�.��(*�) (4)
1.1.3 Gasto Energético
De acordo com Wilson e Papadopoulos (2004) o objetivo da pedalada é exercer uma força de
propulsão (Fp) contra o chão para manter uma velocidade constante, essa força é igual a força total
que resiste a esse movimento a frente. Essa força é composta por:
Fa: força de resistência do ar, a partir do movimento da bicicleta em relação ao ar com uma
velocidade (v) em relação ao solo e a velocidade do vento (vwind);
Fs: resistência a inclinação, seria a resistência em relação a superfície da estrada inclinada;
Frol: força de resistência ao rolamento, atrito com o pneu oriundo de deformações no pneu
como na pista;
Fb: resistência a colisões devido a saltos, na colisão com o solo a velocidade reduz-se a frente
e a energia é dissipada através do piloto;
Quando a força de propulsão (Fp) possui o mesmo valor que a combinação das demais forças,
encontra-se o equilíbrio para manter uma velocidade constante. Quando a força propulsão supera as
demais temos uma aceleração, ou caso o contrário, desaceleração. Equação 5.
./ − (." + .$ + .#12 + .3) = ." = 4. " (5)
Pode-se determinar o gasto energético do piloto para manter uma dada velocidade, para isso
é necessário que a potência produzida pelo ciclista e transmitida a roda (Ww) seja igual as consumidas
com o arrasto aerodinâmico (Wwind), o rolamento (Wrol), a inclinação do terreno (Ws) e as perdas
devidos a impactos de solo irregular (Wb).
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 9
A potência fornecida a roda (Ww), Equação 6, é ligeiramente menor que a produzida no pedal
pelo ciclista por causa de perdas na transmissão, cuja eficiência varia entre 0,85-0,97. Sendo a
potência produzida no pedal (Wr) temos:
56 = 5#. 74 (6)
A resistência do ar, Equação 7, tem valores significativos em velocidades acima de 7 m/s,
devido ao arrasto aerodinâmico, quantificado pelo seu coeficiente (Ka), a potência devido ao arrasto
aerodinâmico (Wwind) necessária para conduzir a bicicleta a uma dada velocidade e com uma dada
velocidade do vento é:
58��9 = :;. �(� + �8��9)² (7)
A resistência devido ao rolamento é baseada nas leis básicas da física, tanto a resistência do
solo (Cr) como a do pneu aumenta com um aumento na carga transportada. A força devido ao
rolamento (Frol) é dada pela Equação 8:
.#12 = <#.4. � (8)
Já a energia perdida devido a resistência do rolamento, Equação 9:
5#12 = .#12. � (9)
O segundo aspecto que mais oferece resistência ao piloto depois do arrasto aerodinâmico são
as inclinações enfrentadas no terreno, sendo maior quanto maior for o ângulo (ϕ) a inclinação. A força
devido a inclinação (Fs), Equação 10, é retirada das leis básicas da física. E a energia devido a
inclinação do terreno (Ws), Equação 11.
.$ = 4. �. $%&(=) (10)
5$ = .$. � (11)
A resistência aerodinâmica, a resistência ao slope (inclinação) e a resistência ao rolamento
podem ser combinadas em uma equação para calcular a energia necessária para a bicicleta andar, é a
chamada equação de velocidade em estado de equilíbrio.
56 = 5#. 74 = 5$ +5#12 +5$ (12)

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 10
5#. 74 = >:". (� + �8��9)? +4.�. ($ + <#)@. � (13)
1.1.4 Comportamento dos ventos em Aracaju
Em estudo realizado na região nordeste por Pinto et. al. (2000) em seu artigo defendido no
Congresso Brasileiro de Meteorologia, Edição XI. Observou-se que a velocidade do vento em Aracaju
tem em média 3,6 m/s.
2. MATERIAIS E MÉTODOS
Este trabalho consistiu nas seguintes etapas: obter em lojas especializadas do mercado local,
alguns modelos de bicicletas de mountain bike hardtail dentre as mais vendidas, coleta das dimensões
dos respectivos quadros, modelagem em CAD do conjunto ciclista e bicicleta utilizando software
específico, elaboração de uma rotina de cálculo para obtenção do comportamento raio de curva x
velocidade e do gasto energético para uma dada velocidade, comparação dos resultados e proposta de
trabalhos futuros.
Foram obtidas 3 bicicletas de diferentes marcas com a mesma faixa de preço. Estas possuíam
o quadro construído em liga de alumínio Al 6061-T6. As dimensões do quadro destas bicicletas foram
obtidos por meio de paquímetro, micrometro e medidor de ângulo digital.
2.1 Materiais utilizados
Micrometro Digital Mitutoyo modelo PK-0505 com faixa de medição de 0-25mm e resolução
de 0,01mm. Paquímetro Analógico Starfer com faixa de medição de 0-150mm e resolução de
0,02mm. Medidor de ângulo digital Bosch modelo DWM 40 com faixa de medição de 0 a 220º e
resolução de 0,1°. Os desenhos e as simulações foram feitas em um computador tipo Desktop com
processador Intel® Core 2 Duo E7400 2.80 GHz, 2GB de memória RAM e com sistema operacional
Windows® 7 Ultimate, 32 bits. Softwares utilizados: Microsoft Excel, Solidworks ® 2012 e ESS
Engineering Equation Solver.
2.2 Método
A primeira etapa do trabalho fora a obtenção de bicicletas de mountain bike do tipo hardtail
em lojas localizadas em Aracaju, com a condições de que fossem lojas especializadas em bicicletas
para a obtenção das bicicletas por empréstimo, ou a permissão para poder desmontar todas as peças
e realizar as devidas medições nos quadros.
A segunda etapa após a autorização e as bicicletas terem sidos obtidas na etapa anterior
consistiu na desmontagem completa das bicicletas e a realização de medições dos aspectos
construtivos de cada um dos quadros.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 11
A etapa posterior foi a modelagem em CAD dos quadros das bicicletas, como as três
bicicletas obtidas possuíam componentes bastante semelhantes como guidon, pedais, assento e rodas,
elas foram modeladas com peças genéricas, comum a todas, bem como considerou-se o mesmo
ciclista, com 180cm e 80kg.
Com os dados obtidos nas etapas anteriores executou-se a quinta etapa, Elaboração da rotina
de cálculo para obtenção do gasto energético por meio das equações do item 1.1.3 e o desempenho
de cada uma das bicicletas diante de curvas, utilizando o equacionamento apresentado no item 1.1.2
fora fixado três ângulos de inclinação da bicicleta (15°, 30° e 45°), e a uma dada velocidade de
cruzeiro, encontrando o raio de curva que é possível de se executar.
E a última etapa consistiu na análise dos resultados.
3. RESULTADOS E CONCLUSÕES
Dentre as bicicletas vendidas em lojas do ramo em Aracaju, obteve-se 3 delas para a pratica
esportiva do moutain bike. As bicicletas obtidas foram: Caloi Supra, Gt Agressor 3.0 e Venzo Ahead
que possuíam algumas características em comum como: diferentes opções de tamanho de quadro,
quadro construído em liga de alumínio Al 6061-T6. Freios a disco por acionamento mecânico,
transmissão com 21 velocidades, rodas de 26” e suspensão dianteira.
Executou-se a modelagem das 3 bicicletas, Figura 7, obtendo o conjunto bicicleta e ciclista e
extraindo a partir desta modelagem os valores de massa do conjunto, altura do centro de massa,
distância longitudinal do centro de massa, trail mecânico dentre outros dados apresentados na Tabela
1.
FIGURA 7. Modelagem Computacional das bicicletas

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 12
TABELA 1. Dados obtidos das Bicicletas.
Dados Referentes as Bicicletas
- Caloi Supra Gt Aggressor 3.0 Venzo Ahead
Entre-eixos (Lw) 106 cm 104 cm 104 cm
Altura Centro de Massa (YCM) 105 cm 97,6 cm 100 cm
Dist. Longitudinal do Centro de
Massa (XCM)
55 cm 55 cm 58 cm
Raio de roda (RW) 33 cm 33 cm 33 cm
Largura do Pneu (2t) 4,95 cm 4,95 cm 4,95 cm
Massa (m) – Bicicleta e Ciclista 93,08 kg 94,69 kg 93,10 kg
Fork Offset (Lof) 36,94 mm 41,00 mm 42,90 mm
Trail Mecânico (Lmt) 70,59 mm 56,16 mm 43,10 mm
Head Angle (α) 69º 30’ 71º 00’ 73º06’
Ângulo de Cáster (λ) 21º 00’ 19º 00’ 16º 40’
Momento de Inércia Polar (Izz) 33,64 kg.m² 38,82 kg.m² 57,93 kg.m²
Para a Caloi Supra com o ângulo de inclinação (θ = 15º) e corrigindo-o devido ao valor da
largura do pneu e a altura do centro de massa, Equação 3:
� = 15 + "# $%& C0,024 $%&151,05 − 0,024H = 15,36°
Com o valor do ângulo corrigido e variando a velocidade elabora-se um gráfico de raio de
curva e velocidade de cruzeiro através da Equação 4. Com isso para os demais ângulos de inclinação
temos:
FIGURA 8. Raio de Curva x Velocidade para a Caloi Supra.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 13
Para cada um dos exemplares obtidos foi calculado a velocidade a partir da qual é necessário
começar inclinar a bicicleta para se executar uma curva, esta velocidade, denominada velocidade
mínima de inclinação, Equação 1, utiliza os dados de Trail mecânico, altura e distância longitudinal
do centro de massa e gravidade. A partir dos dados da Tabela 1 obteve-se em ordem crescente as
seguintes velocidades acima da qual é necessário inclinar a bicicleta. 1,77 km/h para a Venzo Ahead,
2,01 km/h para a Gt Aggressor 3.0 e 2,17 km/h para a Caloi Supra.
Com base no equacionamento apresentado na seção 1.1.3, para as três bicicletas foram obtidos
o gasto energético para se pedalar no plano com o vento a favor e o vento contra, considerando
também a resistência ao rolamento. Figura 9.
FIGURA 9. Gasto energético para a Caloi Supra
Assim como o comportamento em curvas, as três bicicletas apresentaram respostas
semelhantes as oriundas da Caloi Supra, a tom de comparação foram sobrepostos os gráficos de
energia necessária para cada uma das bicicletas manterem a velocidade constante com o vento contra,
de modo a observar alguma diferença no comportamento energético entre elas. Figura 10.
FIGURA 10. Comparativo Energético entre as Bicicletas
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 14
As três bicicletas apresentaram a mesma resposta entre velocidade de conduta da
bicicleta e raio de curva como o da Caloi Supra, Figura 8, a Caloi Supra, porém, pode executar
uma curva sem necessitar inclinar a uma velocidade ligeiramente maior que as outras duas.
Assim como o comportamento em curva, o comparativo o energético atingiu resultado
semelhante, onde as três bicicletas se comportam de maneira muito semelhantes no quesito de
consumo de energia para manter uma velocidade constante. Devido a análise dinâmica não
apresentar parâmetros de diferenciação entre as bicicletas, para obter a melhor opção de
compra dentre as três, as próximas etapas com estas bicicletas será um teste em uma pista de
mountain bike, com o mesmo piloto, adotando um ensaio comum para as três bicicletas,
aditivo a isto, uma análise de tensões atuantes na bicicleta durante o uso no esporte.
AGRADECIMENTOS
Os autores agradecem aos lojistas locais de bicicletas pelo acesso às informações técnicas e
de mercado.
REFERÊNCIAS
BALLANTINE, R. Richards Bycicle Book. The Revised and Updated First Edition. p. 383. Pan Books, Great Britain. 2000.
BUSTOS, V. – Publicação do Museu da Bicicleta de Joinville – MUBI. 2006.
COSSALTER, V. – Motorcycle Dynamics, 2ª Ed, p. 376. England. 2006.
PEQUINI. S. Ergonomia Aplicada ao Design de Produtos: Um estudo de caso sobre o Design de bicicletas – tese de doutorado, FAU/USP 2005;
PINTO, J. S. SANTOS, F. V. SOUSA, I. F. - Variação Rítmica dos Elementos Climáticos em Aracaju-SE. Artigo apresentado no Congresso Brasileiro de Meteorologia, Edição XI. Rio de Janeiro, 2000;
SILVA, W. – Análise Estrutural de Quadro de Bicicleta Usando Ligas de Alumínio AA 6061-T6 e AA 7005-T6. Trabalho de Conclusão de Curso. UFVR. 2010;
WILSON. D. PAPADOPOULOS. J. – Bicycling Science: with contributions by Jim Papadopoulos. Third Edition. The MIT Press. P. 477. Massachusetts. 2004;