clp - step 7
TRANSCRIPT
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 1/230
Controlador Lógico Programável
CLP

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 2/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR”
Controlador lógico programável (CLP)
SENAI-Sorocaba, Julho 2005 – Revisão 1.5
©SENAI-SP 2005
Material elaborado pelo Docente:
Márcio Aleixo Davi
Diretor Fernando Manoel Gonçalves
Coordenador Hélio Antonio Massagardi
Todos os direitos reservados. Proibida a reprodução total ou parcial, por qualquer meio ou processo. Aviolação dos direitos autorais é punível como crime com pena de prisão e multa, e indenizações diversas(Código Penal Leis Nº 5.988 e 6.895).
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 3/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR”
SENAI Serviço Nacional de Aprendizagem IndustrialEscola SENAI “Gaspar Ricardo Júnior”Praça Roberto Mange, 30 - Santa RosáliaCEP 18090-110 - Sorocaba - SP
TelefoneFax
SENAI on-line
Home page
(0XX15) 3233-5144(0XX15) 3233-5144 ramais 215 / 2190800-55-1000
www.sp.senai.br
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 4/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR”
Apresentação
O presente volume, Curso CLP, apresenta conhecimentos teóricos e práticos do usodos Controladores Lógicos Programáveis (CLP). Nos primeiros capítulos é abordado ouso do CLP em termo genérico e depois enfocado na utilização da CPU S7-200 daSiemens, equipamento disponível em nosso laboratório.
O objetivo deste volume é servir de apoio ao trabalho docente e fornecer material dereferência aos alunos. Nele, procurou-se apresentar o conteúdo básico e avançadosobre os assuntos abordados, que são muito amplos e ricos. Por isso, a utilização dematerial de apoio, como manuais e catálogos dos fabricantes, vídeos e bibliografiaextra, é aconselhável a fim de enriquecer sua aplicação.
Aos docentes, desejo que este material forneça um suporte adequado à sua atividadeem sala de aula.
Aos alunos, desejo que ele seja não só a porta de entrada para o maravilhoso mundoda automação, mas também que indique os inúmeros caminhos que este mundo podefornecer quando se tem curiosidade, criatividade e vontade de aprender.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 5/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR”
Sumário
Introdução 7
Sistema de Automação: Rígido X Flexível 11
Conceito CLP 15
Revisão dos pré-requisitos para o curso de CLP 41
Resultado da Operação Lógica 63
Descrição da CPU S7-200 65
Endereçamento 73
Ciclo de Scan da CPU 85
Programando CLP S7-200 Linguagem STEP 7 91
Elementos básicos para Construir um Programa 97
Utilizando O Software STEP 7-Micro/WIN 32 101
Instruções 115
Instruções para a programação de um CLP 165
Configuração passo a passo da Interface Homem Máquina TD200 185
Parte Prática – Básica 195
Parte Prática – Avançada 209
Referências Bibliográficas 229

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 6/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR”
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 7/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 7
1. Introdução
1.1 Conceitos Gerais
As operações associadas ao controle de processos existem na natureza desde que a
primeira criatura surgiu na face da Terra. Podemos considerar controle de processo
natural as operações que regulam algumas características físicas de suma importância
para a vida humana, tais como a temperatura do corpo, a pressão sangüínea, a
intensidade de luz na retina, o equilíbrio de líquidos no corpo, etc. Com o tempo, o
homem sentiu a necessidade de regular alguns dos parâmetros físicos externos ao seu
meio para manter as condições de vida e assim teve início o controle de processo
artificial.
O mercado consumidor cada vez mais competitivo tem exigido das indústrias produtos
de melhor qualidade e de custo reduzido. Para atingir tais resultados, não basta
apenas a perícia humana, é necessário também um bom nível de automação.
1.2 Automatização
No início da industrialização, os processos industriais utilizavam o máximo da força da
mão-de-obra.
A produção era composta por etapas ou estágios, nos quais as pessoas desenvolviam
sempre as mesmas funções, especializando-se em uma certa tarefa ou etapa daprodução. Assim temos o princípio da produção seriada.
O mesmo ocorria com as máquinas de produção, que eram específicas para uma dada
aplicação, o que impedia seu uso em outras etapas da produção. Ou seja, uma
determinada máquina só fazia furos e de um só tipo.
Com o passar do tempo e a valorização do trabalhador, foi preciso fazer algumas
alterações nas máquinas e equipamentos, de forma a resguardar a mão-de-obra de
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 8/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 8
algumas funções inadequadas à estrutura física do homem. A máquina passou a fazer
o trabalho mais pesado e o homem, a supervisioná-la.
Com a finalidade de prover controle do sistema de produção, foram colocados
sensores nas máquinas para indicar condições de funcionamento que garantissem o
acionamento dos atuadores.
Automatizar um sistema tornou-se muito mais viável à medida que a eletrônica passou
a dispor de circuitos eletrônicos capazes de realizar funções lógicas e aritméticas com
os sinais de entrada e gerar os respectivos sinais de saída.
Com este avanço, o controlador, os sensores, e os atuadores passaram a funcionar
em conjunto, transformando o processo em um sistema automatizado, onde o própriocontrolador toma decisões em função da situação dos sensores e aciona os atuadores.
A automação de processos industriais pode ocorrer em duas formas básicas:
• Sistemas de comando;
• Sistemas de controle.
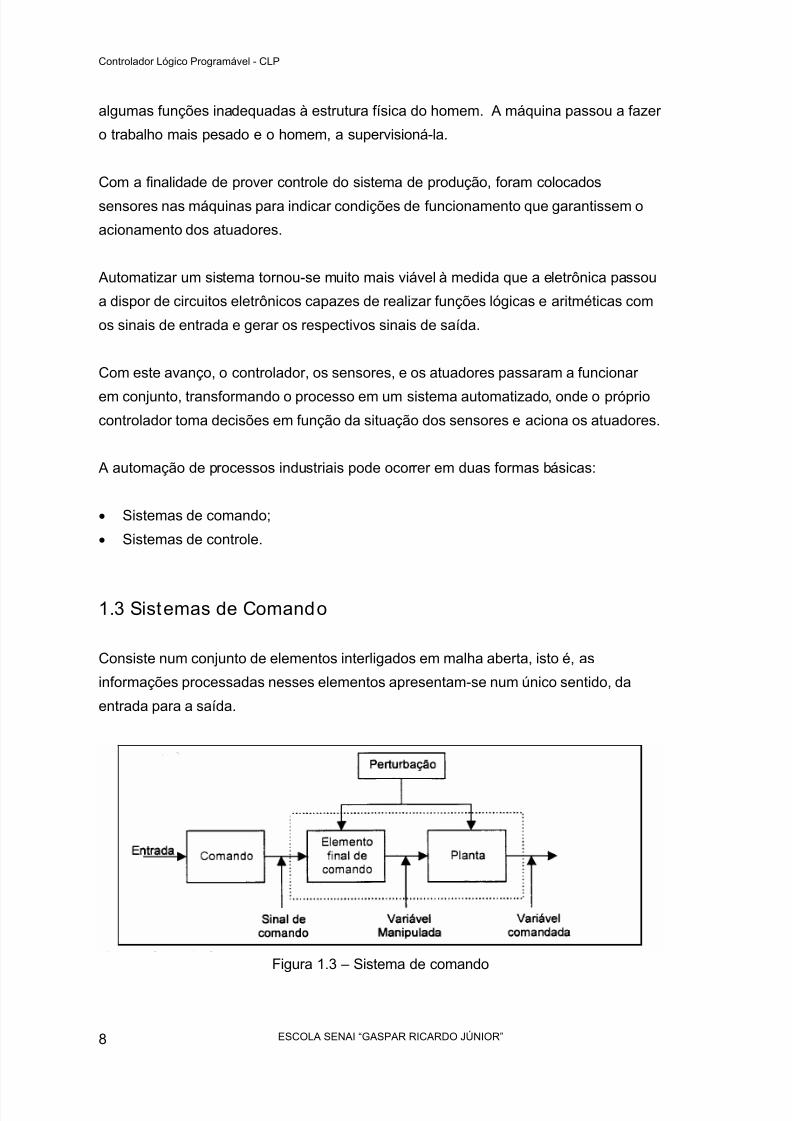
1.3 Sistemas de Comando
Consiste num conjunto de elementos interligados em malha aberta, isto é, as
informações processadas nesses elementos apresentam-se num único sentido, da
entrada para a saída.
Figura 1.3 – Sistema de comando
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 9/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 9
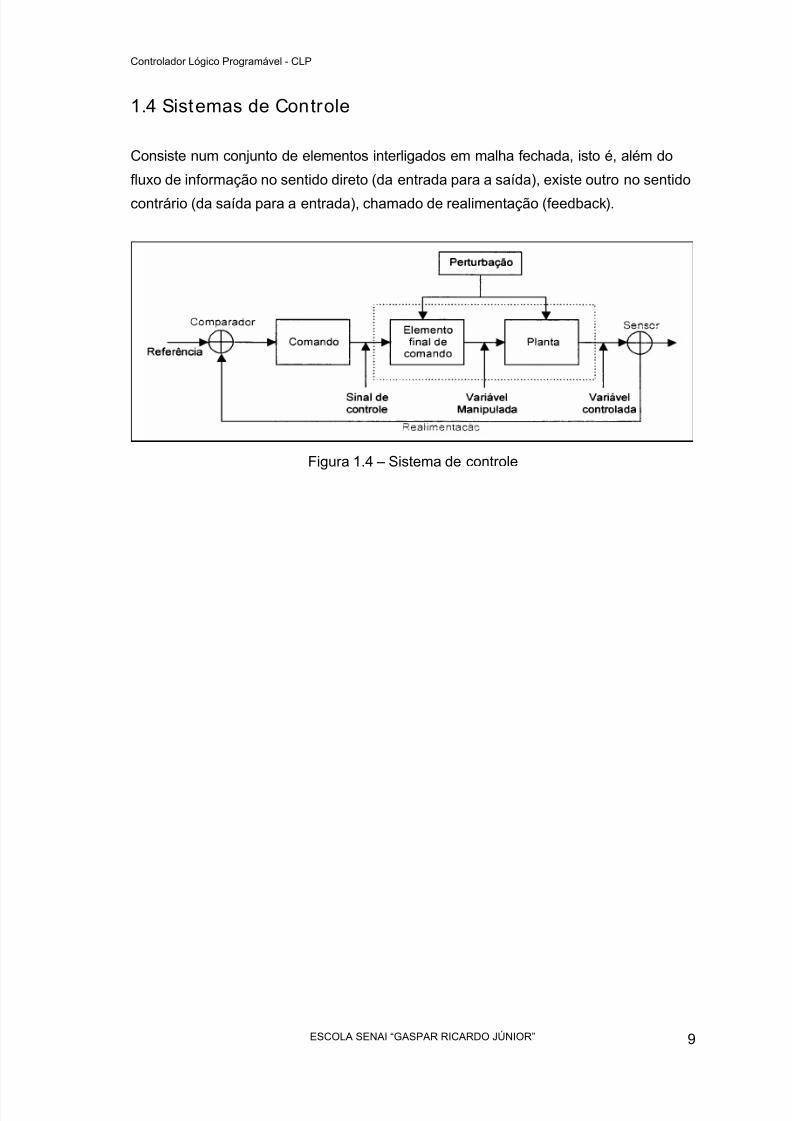
1.4 Sistemas de Controle
Consiste num conjunto de elementos interligados em malha fechada, isto é, além do
fluxo de informação no sentido direto (da entrada para a saída), existe outro no sentido
contrário (da saída para a entrada), chamado de realimentação (feedback).
Figura 1.4 – Sistema de controle

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 10/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 10
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 11/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 11
2. Sistema de Automação:
Rígido X Flexível
Os primeiros sistemas de automação operavam por meio de componentes
eletromecânicos, como relês e contatores. Neste caso, os sinais acoplados à máquina
ou equipamento a ser automatizado acionam circuitos lógicos a relês que disparam as
cargas e os atuadores.
As máquinas de tear são bons exemplos da transição de um sistema de automação
rígida para automação flexível.
As primeiras máquinas de tear eram acionadas manualmente. Depois passaram a ser
acionadas por comandos automáticos, entretanto, estes comandos só produziram um
modelo de tecido, de padronagem, de desenho ou estampa.
A introdução de um sistema automático flexível do tipo "placas perfuradas" nomecanismo de uma máquina de tear, pelo francês Jaquard, tomou-se possível produzir
diversos padrões de tecido em um mesmo equipamento. Com o avanço da eletrônica,
as unidades de memória que armazenam os modelos de tecido a ser produzidos
ganharam maior capacidade, permitindo armazenar mais informações.
Os circuitos lógicos tornaram-se mais rápidos, compactos e capazes de receber mais
informações de entrada, atuando sobre um maior número de dispositivos de saída.
Chegamos assim, aos microcontroladores responsáveis por receber informações dasentradas, associa-Ias às informações contidas na memória e a partir destas
desenvolver uma lógica para acirrar as saídas.
Toda esta evolução nos levou a sistemas compactos com alta capacidade de controle,
que permitem acionar inúmeras saídas em função de diversos sinais de entradas
combinados logicamente.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 12/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 12
A parte mais interessante desta evolução é que toda a lógica de acionamento, em
função das entradas, pode ser desenvolvida através de software, que determina ao
controlador a seqüência de acionamento a ser desenvolvida.
Assim, se a lógica pode ser alterada, podemos dizer que o sistema de controle, com
esta característica é um sistema flexível.
Os Controladores Programáveis são equipamentos eletrônicos de controle que atuam
a partir desta filosofia.
2.1 Comparativo entre comando por cabos e programável
Na técnica da automação são normalmente empregados dois tipos de comandos:
comando por cabos e comandos programáveis.
Com o termo "comando por cabos" se define normalmente um comando elétrico
realizado através da conexão de contatos de relês, ou em cada caso de componentes
eletromecânicos.
Um comando programável pode ser realizado empregando um particular dispositivo
eletrônico que é defino com o nome de "Controlador Lógico Programável".
As diferenças essenciais entre os dois tipos de comando são mostradas na figura 2.1
2.1.1 Comando por cabos
Mediante a ligação de simples elementos, como contatos, geradores de sinais,
bobinas, etc. se determina segundo aquele “programa” o comando que deve ser
efetuado.
Na parte esquerda da figura vem mostrado a associação em série dos botões
pulsantes e fim-de-curso para o comando da bobina magnética.
Os botões pulsantes e os fins-de-curso devem assumir determinados estados para
poder permitir a excitação das várias bobinas.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 13/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 13
Uma variação ou modificação no “programa” necessitaria de um recabeamento da
estrutura elétrica. Isto significa que o comando por cabos pode ser realizado somente
conhecendo perfeitamente quais são as condições que se devem verificar (“programa”)
para fazer em modo que se ative um determinado comando.
2.1.2 Comando programável
No caso dos controladores lógicos programáveis, a configuração do equipamento e o
cabeamento são independentes do “programa” que deverá desenvolver o controlador,
neste caso pode-se usufruir do equipamento na sua forma standard. Por exemplo, os
geradores de sinais, os contatos (sensores) e as bobinas de ativação previstas na
planta / máquina são interligados através dos terminais de conexão do CLP.
O programa que deverá ser executado no CLP vem carregado (escrito) na memória de
programa através de um dispositivo apropriado de programação. Neste programa vem
fixada a seqüência dos sinais (contatos, fins-de-curso, pressostatos, termostatos, etc.),
e também a associação lógica entre eles (AND, OR) e como deverão ser atribuídos
resultados as várias saídas (como e quando serão ativadas ou desativadas as bobinas
ou os vários atuadores finais).
No caso de ser necessário uma modificação no programa, não ocorrerá o
recabeamento do comando como no caso do comando por cabos, mas deverá
unicamente modificar o conteúdo da memória de programa através do dispositivo de
programação.
Comparativo entre comando por cabos e programável.

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 14/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 14
Figura 2.1 – Comandos por cabos e programável
Comando Eletrônico
Comandos por cabos Comandos programáveis
Controlador Programável
Memóriade programa
Programa
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 15/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 15
3. Conceito CLP
Os Controladores Lógicos Programáveis (CLP) são equipamentos eletrônicos de última
geração utilizados em sistemas de automação flexível. Permitem desenvolver e alterar
facilmente a lógica para acionamento das saídas em função das entradas. Desta
forma, podemos associar diversos sinais de entrada para controlar diversas cargas
ligadas em pontos de saída.
3.1 Histórico
O Controlador Programável (CLP) nasceu praticamente dentro da indústria
automobilística americana, especificamente na Hydronic Division da General Motors,
em 1968, devido a grande dificuldade de mudar a lógica de controle de painéis de
comando a cada mudança na linha de montagem. Tais mudanças implicavam em
altos gastos de tempo e dinheiro.
Sob a liderança do engenheiro Richard Morley, foi preparada uma especificação que
refletia as necessidades de muitos usuários de circuitos a relês, não só da indústria
automobilística como de toda a indústria manufatureira.
Nascia assim, um equipamento bastante versátil e de fácil utilização, que vem se
aprimorando constantemente, diversificando cada vez mais os setores industriais e
suas aplicações, o que justifica hoje um mercado mundial estimado em 4 bilhões de
dólares anuais.
Em 1978 a National Electrical Manufatures Association (NEMA) determinou a seguinte
definição para CLP, denominada NEMA Standard ICS3-1978:
Um equipamento de lógica digital, operando eletronicamente que usa memória
programável para armazenamento interno das instruções de implementação específica
como lógica, seqüencial, temporização, contagem e operações aritméticas, para
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 16/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 16
controle de máquinas e processos industriais com vários modelos de módulos de
entradas e saídas digitais e analógicas.
O grande problema destes equipamentos era, no início, que sua arquitetura (chips e
conexões) e programação (software) eram proprietários, ou seja, cada fabricante fazia
da maneira que mais lhe adequava.
Desde o seu aparecimento, até hoje, muita coisa evoluiu nos controladores lógicos,
como a variedade de tipos de entradas e saídas, o aumento da velocidade de
processamento, a inclusão de blocos lógicos complexos para tratamento das entradas
e de módulos de interface com o usuário.
Nos inícios dos anos 90, graças aos baixos custos das CPU's de mercado, deu-segrande ênfase ao desenvolvimento de CLP, com microprocessadores comuns. Além
disso, o preço destes componentes baixou muito, principalmente pela atuação da
microeletrônica e otimização de hardware (equipamentos poderosos em pequeníssimo
espaço físico e baixo consumo de potência).
Os Controladores Lógicos Programáveis apresentam uma estrutura funcional muito
peculiar que é a facilidade com que podem ser acoplados a sistemas de comando de
máquinas e a rapidez com que podem ser implantadas lógicas de acionamento atravésde programação.
Vantagens dos controladores lógicos programáveis em relação aos sistemas de
controle automático convencionais:
• Ocupam menor espaço;
• Requerem menor potência elétrica, podem ser reutilizados;
• São programáveis, permitindo alterar os parâmetros de controle;
• Apresentam maior Confiabilidade;
• Manutenção mais fácil;
• Oferecem maior flexibilidade, apresentam interface de comunicação com outros
CLP´s, e computadores de controle;
• Permitem maior rapidez na elaboração do projeto do sistema;
Podemos afirmar que projetos de automação e controle envolvendo CLP reduzem otrabalho de desenvolvimento de hardware dos circuitos lógicos do acionamento, bem
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 17/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 17
como os dispositivos de potência para acionamento das cargas e dos atuadores, uma
vez que podemos escolher módulos de saída já prontos, adequados ao tipo de carga
que queremos acionar.
Podemos didaticamente dividir os CLP´s de acordo com o sistema de programação por
ele utilizado, sendo:
1ª Geração: Os CLP´s de primeira geração se caracterizam pela programação
intimamente ligada ao hardware do equipamento. A linguagem utilizada era o
Assembly que variava de acordo com o processador utilizado no projeto do CLP, ou
seja, para poder programar era necessário conhecer a eletrônica do projeto do CLP.
Assim a tarefa de programação era desenvolvida por uma equipe técnica altamente
qualificada, gravando-se o programa em memória EPROM, sendo realizadanormalmente no laboratório junto com a construção do CLP.
2ª Geração: Aparecem as primeiras "Linguagens de Programação" não tão
dependentes do hardware do equipamento, possíveis pela inclusão de um "Programa
Monitor " no CLP, o qual converte ( no jargão técnico, compila), as instruções do
programa, verifica o estado das entradas, compara com as instruções do programa do
usuário e altera o estados das saídas. Os terminais de programação (ou maletas,
como eram conhecidas) eram na verdade programadores de memória EPROM. Asmemórias depois de programadas eram colocadas no CLP para que o programa do
usuário fosse executado.
3ª Geração: Os CLP´s passam a ter uma Entrada de Programação, onde um Teclado
ou Programador Portátil é conectado, podendo alterar, apagar, gravar o programa do
usuário, além de realizar testes (Debug) no equipamento e no programa. A estrutura
física também sofre alterações sendo a tendência para os Sistemas Modulares com
Bastidores ou Racks.
4ª Geração: Com a popularização e a diminuição dos preços dos microcomputadores
(normalmente clones do IBM PC), os CLP´s passaram a incluir uma entrada para a
comunicação serial. Com o auxilio dos microcomputadores a tarefa de programação
passou a ser realizada nestes. As vantagens eram a utilização de várias
representações das linguagens, possibilidade de simulações e testes, treinamento e
ajuda por parte do software de programação, possibilidade de armazenamento de
vários programas no micro, etc.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 18/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 18
5ª Geração: Atualmente existe uma preocupação em padronizar protocolos de
comunicação para os CLP´s, de modo a proporcionar que o equipamento de um
fabricante "converse" com o equipamento outro fabricante, não só CLP´s, como
controladores de processos, sistemas supervisórios, redes internas de comunicação e
etc., proporcionando uma interação a fim de facilitar a automação, gerenciamento e
desenvolvimento de plantas industriais mais flexíveis e normalizadas, fruto da
chamada Globalização. Existe uma fundação mundial para o estabelecimento de
normas e protocolos de comunicação.
3.2 Princípio de Funcionamento
Como o próprio nome já diz, o CLP (Controlador Lógico Programável) é umequipamento que realiza um comando ou controle de uma máquina ou processo a
partir de um programa pré-definido. Assim se desejarmos que o CLP realize alguma
espécie de tarefa de controle em um sistema, devemos previamente programa-lo para
tal. Essa programação não vem pronta do fabricante do CLP, mas sim definida pelo
usuário.
O CLP seguirá rigidamente passo a passo a execução do programa do usuário e o
resultado dependerá tão somente da programação executada.
Existem diversos tipos de módulos de entrada e de saída que se adequam aos sinais
desejados.
Os módulos de entrada e saídas digitais são compostos de grupos de bits associados
em conjuntos de 8 bits (1 byte) ou conjuntos de 16 bits (1 word) de acordo com o
fabricante da CPU do controlador lógico programável.
Já as entradas analógicas correspondem a módulos conversores analógico / digital, de
forma a converter o sinal de entrada em um valor digital, normalmente de 12 ou 16 bits
para que a CPU do controlador possa considerá-las e tratá-las.
As saídas analógicas são módulos conversores digital para analógico com a mesma
característica de precisão, ou seja, na maioria são conversores de 12 ou 16 bits, assim
o controlador disponibiliza um valor binário que terá o seu correspondente na saída
digital.

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 19/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 19
Os sinais dos sensores ou transdutores acoplados à máquina ou equipamento são
aplicados às entradas do controlador.
A cada ciclo (denominado de varredura ou scan rate) todos os sinais vindos do meio
externo aplicados às entradas são lidos e transferidos para a uma determinada área da
unidade de memória interna denominada tabela imagem de entrada.
Estes sinais são combinados entre si e combinados à sinais internos. Esta associação
corresponde à lógica funcional que é determinada pelo programa do usuário. Este
também encontra-se armazenado numa área da memória interna do CLP denominada
tabela de programação.
Ao término do ciclo de varredura, os resultados da lógica funcional são transferidos àtabela imagem de saída e então aplicados aos terminais de saída, provocando as
atuações no meio externo.
Podemos dizer que o CLP é um "microcontrolador' acrescido de dispositivos de I/O
(Entrada/Saída), aplicado ao controle de um sistema ou de um processo.
Para realizar a tarefa de controle, o processador do CLP, simplesmente executa passo
a passo o roteiro de instruções contido na tabela de programação que o usuárioelaborou.
3.3 Modularidade
Os Controladores Programáveis de médio e grande porte são equipamentos
disponibilizados em módulos, ou seja, cada configuração pode ser montada pelo
usuário de acordo com a sua necessidade.
Esta arquitetura também contribui para que a manutenção seja facilitada, uma vez que
no caso de falha, será trocado apenas o cartão defeituoso.
Em termos de arquitetura funcional, podemos apresentar a estrutura de um CLP
dividida em 5 partes:
• Unidade Central de Processamento (C.P.U.);
• Sistema BUS;
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 20/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 20
• Memória;
• Módulo de Entrada;
• Modulo de Saída;
• Fonte de Alimentação;
3.3.1 Módulo de CPU
O módulo da C.P.U. (ou U.C.P. - unidade central de processamento) e o principal
módulo do CLP responsável pelo processamento dos dados e tomada das decisões
em função do roteiro contido no seu software de base ou firmware.
3.3.1.1 Scan rate ou tempo de varredura
Como já discutimos anteriormente, os sinais dos sensores acoplados à máquina ou
equipamento são aplicados às entradas do controlador. A cada ciclo (denominado de
varredura) todos os sinais aplicados às entradas são lidos e transferidos para a
unidade de memória interna denominada memória imagem de entrada. Estes sinais
são associados entre si e aos sinais internos, esta associação corresponde à lógica de
acionamento que é programada pelo usuário. Ao término do ciclo de varredura, os
resultados da lógica de acionamento são transferidos à memória imagem de saída e
então aplicados aos terminais de saída.
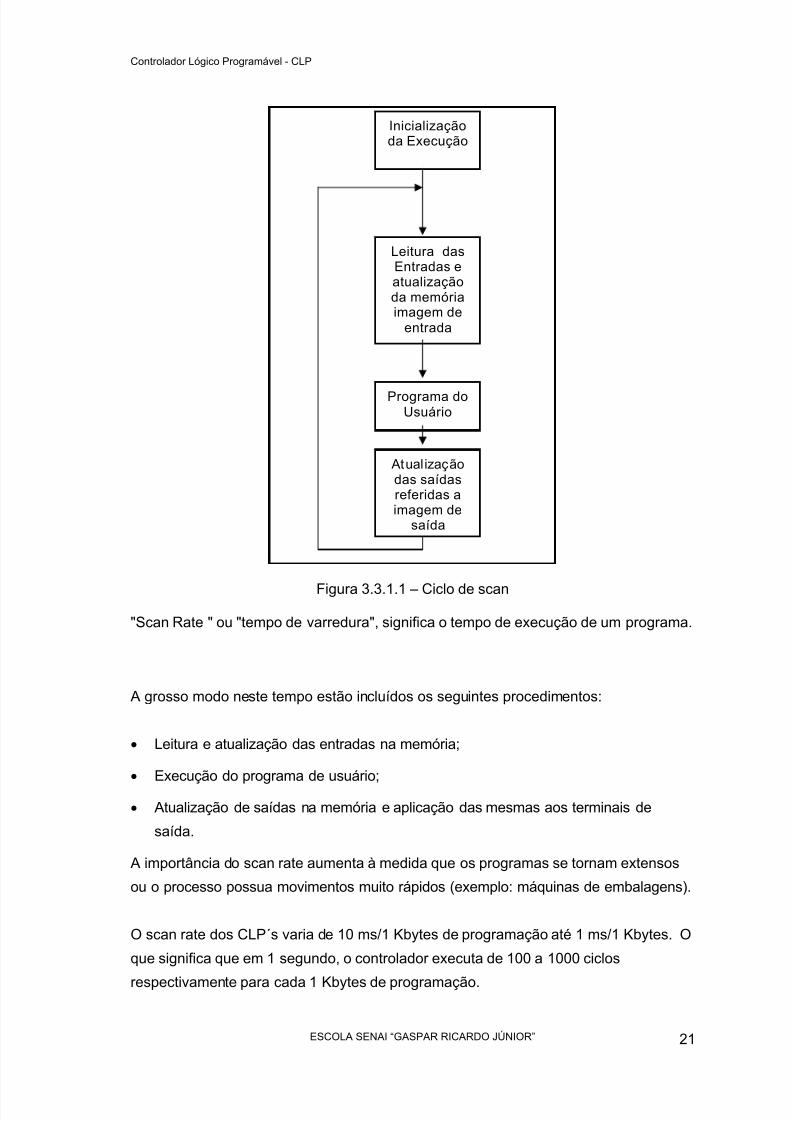
Este ciclo pode ser representado pelo fluxograma abaixo:
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 21/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 21
Figura 3.3.1.1 – Ciclo de scan
"Scan Rate " ou "tempo de varredura", significa o tempo de execução de um programa.
A grosso modo neste tempo estão incluídos os seguintes procedimentos:
• Leitura e atualização das entradas na memória;
• Execução do programa de usuário;
• Atualização de saídas na memória e aplicação das mesmas aos terminais de
saída.
A importância do scan rate aumenta à medida que os programas se tornam extensos
ou o processo possua movimentos muito rápidos (exemplo: máquinas de embalagens).
O scan rate dos CLP´s varia de 10 ms/1 Kbytes de programação até 1 ms/1 Kbytes. O
que significa que em 1 segundo, o controlador executa de 100 a 1000 ciclos
respectivamente para cada 1 Kbytes de programação.
Inicializaçãoda Execução
Leitura dasEntradas eatualizaçãoda memóriaimagem de
entrada
Programa doUsuário
Atualizaçãodas saídasreferidas aimagem de
saída
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 22/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 22
Um programa bem elaborado também contribui para diminuir o scan rate do
controlador, assim, o usuário sempre deve ter o hábito de trabalhar de maneira
estruturada, valendo-se do recurso de subrotinas, otimizando desta forma a seqüência
das instruções.
3.3.1.2 WDT - Watchdog Timer
Outra característica importante de um CLP presente na CPU é a existência de um
Watchdog Timer . O WDT contribui para aumentar a segurança do sistema, trata-se de
um temporizador que monitora o tempo de varredura do CLP, se esse tempo for maior
que o do Watchdog Timer , o CLP será resetado automaticamente, na reinicialização do
mesmo será indicada a falha, que pode ter origem no hardware, ou no programa
desenvolvido pelo usuário.
3.3.1.3 Canais de comunicação
A maioria dos controladores do mercado recebem o programa diretamente através do
canal de comunicação, podendo em alguns modelos apresentar 2 ou três canais,
visando atender aplicações em rede, juntamente com impressoras seriais locais. O
usuário deverá ficar atento quanto à necessidade dos canais seriais, observando os
padrões elétricos disponíveis, sendo os mais usuais o RS232 (comunicação direta como computador) e RS485, utilizado quando é necessário se comunicar com o CLP a
longas distâncias.
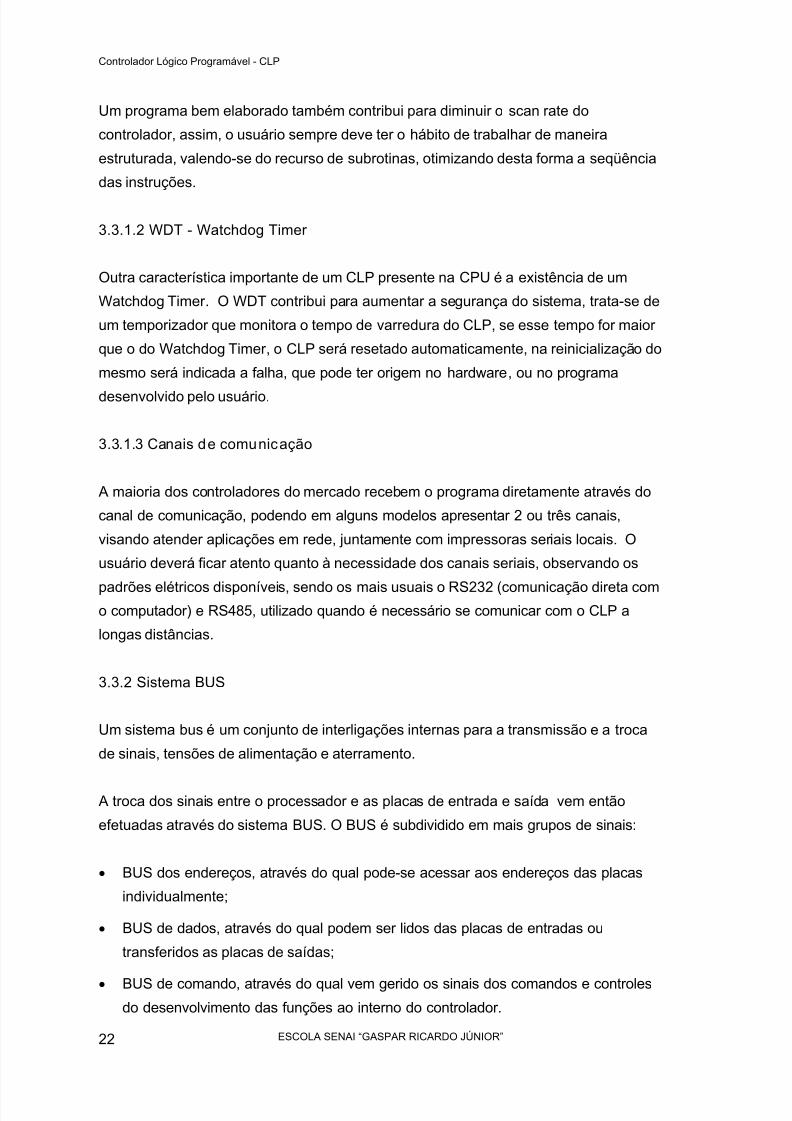
3.3.2 Sistema BUS
Um sistema bus é um conjunto de interligações internas para a transmissão e a troca
de sinais, tensões de alimentação e aterramento.
A troca dos sinais entre o processador e as placas de entrada e saída vem então
efetuadas através do sistema BUS. O BUS é subdividido em mais grupos de sinais:
• BUS dos endereços, através do qual pode-se acessar aos endereços das placas
individualmente;
• BUS de dados, através do qual podem ser lidos das placas de entradas ou
transferidos as placas de saídas;
• BUS de comando, através do qual vem gerido os sinais dos comandos e controlesdo desenvolvimento das funções ao interno do controlador.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 23/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 23
Na placa de alimentação vem gerada, da tensão da rede, a tensão (5V) para as placas
eletrônicas do CLP. A tensão para os sensores, atuadores e per eventuais sinalizações
luminosas que vão acima de 5V ( de 24 a 220 V) são fornecidas de fontes ou
transformadores apropriadamente predispostos.
Figura 3.3.2 – Sistema BUS
3.3.3 Memória
Como já dito, em um CLP o programa do usuário (todas as funções de controle e
comando que devem ser desenvolvidas) são carregadas, instrução após instrução, na
memória.
Este carregamento do programa vem executado do usuário através de um dispositivoapropriado de programação interfaceado com o CLP.
A memória na qual vem carregado este tipo de programa é denominada de memória
de programa.
Todavia não é somente esta seção de memória individual. De fato a memória do CLP e
subdividida nas duas seguintes seções:
MóduloMódulo deSaída
Al imentação sensores
Dispositivos de sinais
Módulo deEntrada
UnidadeCentral
Memória dePrograma
Fonte
Processador
Al imentação para os atuadores
Atuadores / Sinal ização Luminosa
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 24/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 24
MEMÓRIA DE SISTEMA
MEMÓRIA APLICATIVA
3.3.3.1 Memória de sistema
A seção memória de sistema compreende aquela parte de memória destinada a conter
o SISTEMA OPERATIVO do CLP, vale dizer como sistema operativo as funções de
base disponíveis ao usuário no ato de energização do CLP.
Assim sendo, uma zona destinada a conter os dados de trabalho não acessíveis ao
usuário, que são geradas e utilizadas do sistema operativo.
Encontramos além disto, na memória de sistema, uma zona destinada a memorização
de funções coligadas ao programa do usuário e a esse acessível.
Um exemplo são os bits de memory (merker , flag), os contadores, os temporizadores,
a zona para gerir PII (imagem de processo de entrada) e PIO (imagem de processo de
saída).
3.3.3.2 Memór ia Apl icativa
A memória aplicativa, como diz o próprio nome, é destinada as aplicações do usuário,
seja para o programa, e então com o nome de memória de programa, seja para
registro de dados intermediários.
Do ponto de vista tecnológico, atualmente a memória é constituída de componentes
semicondutores com um certo números de celas, nas quais são escritas, em
representação binária, bit a zero ou bit a um em função da instrução.
Uma cela de memória pode então conter uma informação definida do estado lógico
zero ou um.
Um conjunto de bit, organizados em uma informação individual porém com significado
do conjunto, recebe o nome de palavra.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 25/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 25
Uma instrução pode ser longa com uma só palavra de memória, ou mais palavras,
segundo o número de bits necessário para transferir a CPU do CLP a completa
informação associada a aquela instrução.
Cada palavra de memória provém de uma bem precisa posição ou endereço na
memória de programa.
Este endereço vem usado pela CPU para localizar na memória a instrução para uma
sucessiva elaboração. Fala-se então da operação de leitura da memória.
De tudo isto descrito pode-se deduzir que a memória de programa de um CLP é uma
memória semicondutora organizada em palavras, que pode ser escrita e lida.
Para poder acessar a cada palavra é necessário definir uma informação numérica,bem precisa, definida endereço.
Durante a escrita o leitura do programa usuário com o dispositivo de programação, a
CPU gerencia estes endereços em modo completamente automático.
Para os CLP's são disponíveis alguns tipos de memória, sendo as mais utilizadas a
RAM, EPROM, EEPROM.
É útil comentar e entender as diferenças entre estes tipos de memória, tanto para
verificar a escolha entre elas nas características de uso e capacidade.
Em geral, todas as memórias, de qualquer tipo sejam, podem ser subdividas em duas
importantes categorias:
- memória volátil: pertencem a esta categoria todas as memórias que perdem as
informações contidas com a falta de tensão.
- memória não volátil: pertencem a esta categoria todas as memórias que mantém asinformações contidas mesmo com a falta de tensão.
RAM
A RAM (Random Acces Memory = memória de acesso casual) é uma memória o qual
o conteúdo pode ser muito rapidamente modificado, por exemplo na fase de start-up
de um processo ou máquina. É então uma memória de leitura e escrita, mas volátil.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 26/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 26
Por este motivo uma bateria tampão fornece a alimentação necessária afim que o
conteúdo da RAM não se perca com a falta de tensão proveniente da fonte.
A sustentação do dado com a bateria tampão dura um bom tempo com a ausência de
tensão da fonte (anos), devido ao fato que as memórias RAM são fabricadas com
família lógica CMOS com baixo consumo de corrente.
No entanto é recomendável trocar a bateria do CLP pelo menos a cada dois anos, para
evitar surpresas com a perca do programa devido a bateria descarregada.
Devido a novas tecnologias de super-capacitores (na ordem de 3 Farad, com uma
dimensão muito reduzida), alguns CLP's dotado com este componente não utilizambaterias de tampão mas sim a carga acumulada neste capacitor, que é alimentado pela
tensão da fonte quando realizada a primeira energização do CLP, para fornecer a
tensão necessária para manter os dados da memória.
EPROM
A EPROM (Erasable Programmable Read Only Memory = memória cancelada eprogramada somente a leitura) é, como descrito no próprio nome, uma memória
somente de leitura, no qual o conteúdo pode ser cancelado quando se deseja fazer
uma nova programação. Esta memória pertence a categoria das memória não voláteis,
capaz então de manter o conteúdo com a ausência de tensão da fonte.
O cancelamento do conteúdo desta memória é realizado retirando-a de seu
alojamento, geralmente do modulo da CPU, expondo a janela de acesso ao material
semicondutor a luz ultravioleta.
É aconselhável que após o cancelamento do conteúdo, se cubra a janela de acesso
com um adesivo foto-isolante a fim de evitar um cancelamento indesejável, devido a
luzes que possuem em seu espectro parte da luz ultravioleta. (solar, fluorescente, etc.).
ATENÇÃO: É importante salientar que o cancelamento do conteúdo será total, sendo
impossível o cancelamento parcial.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 27/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 27
A transferencia de dados para este tipo de memória é realizada com dispositivos
especiais, de acordo com o fabricante, ou por intermédio de terminais de programação
incorporado com dispositivo programador de EPROM (PG no caso da SIEMENS).
EEPROM
A EEPROM (Electrically Erasable Programmable Read Only Memory = memória
cancelada eletricamente e reprogramável) é uma memória não volátil, como a EPROM.
A diferença entre as duas é que a EEPROM e cancelável através de um simples
comando elétrico de uma unidade de programação, com tempo então de cancelamento
e escrita muito veloz em relação a EPROM.
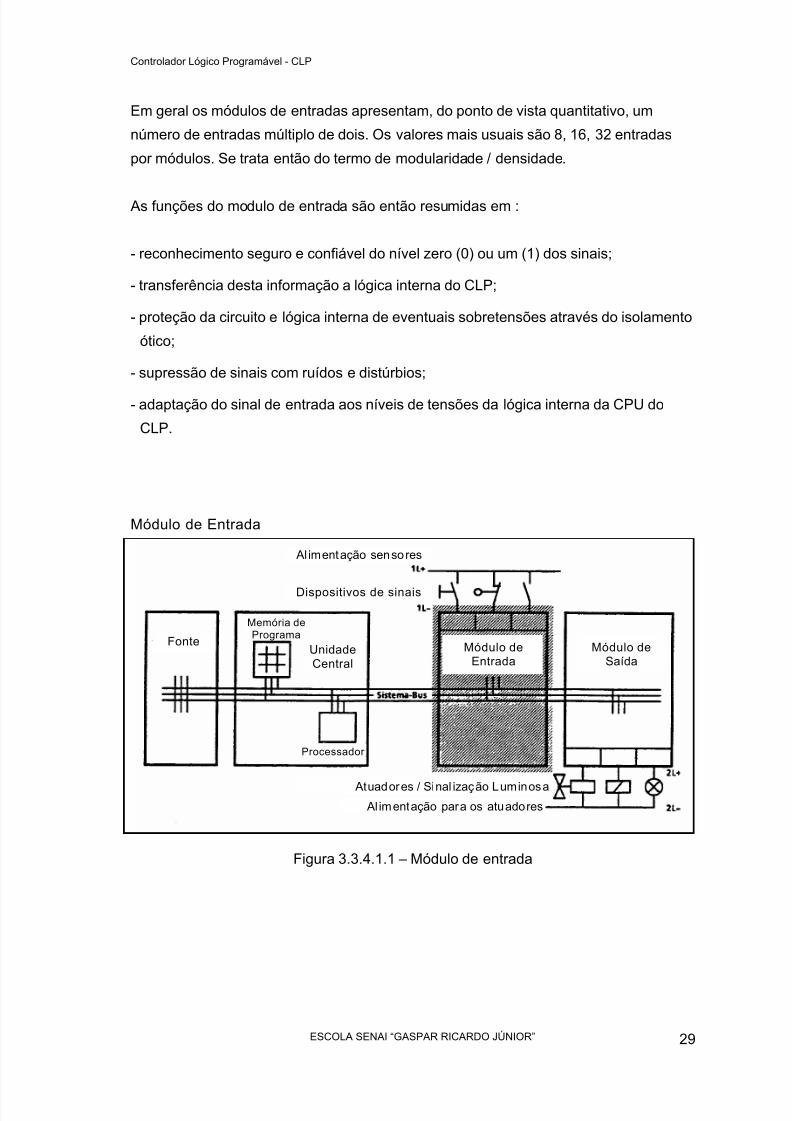
3.3.4 Módulos de Entrada e Saída
As entradas e saídas são as vias de ligação do CLP com o meio externo. São o
elementos intermediários entre a C.P.U. e os elemento transdutores e atuadores do
campo.
Existem diversos tipos de módulos de entrada e de saída que se adequam aos sinais
desejados.
Os módulos de entrada e saída são compostos de grupos de bits associados em
conjuntos de 8 bits (1 byte) ou conjuntos de 16 bits (1 word) de acordo com o tipo da
CPU do CLP. Já as entradas analógicas correspondem à módulos conversores
analógico / digital, de forma a converter o sinal de entrada em um valor digital,
normalmente de 12 ou 16 bits para que a CPU do controlador possa considera-Ias e
trata-Ias.
As saídas analógicas são módulos conversores digital para analógico com a mesma
característica de precisão, ou seja, na maioria são conversores de 12 ou 16 bits, assim
o controlador disponibiliza um valor binário que terá o seu correspondente na saída
digital.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 28/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 28
3.3.4.1 Módulos de entradas e saídas digi tais
Os módulos de entradas e saídas digitais trabalham tanto com sinais de tensão
contínua, quanto sinais alternados. Para os níveis de C.C., o padrão adotado é de 24
V, o qual possui uma relação sinal/ruído adequada para ambientes industriais e 110 e
220 V, para níveis C.A..
3.3.4.1.1 Módulo de Entrada
Todas as informações que chegam do mundo externo, podem ser definidas com o
termo genérico de SINAL, mais precisamente sinais de entrada.
Tais sinais devem ser entendidos sempre como sinais digitais, então com dois estados
lógicos bem precisos:
- estado lógico 1 ( tensão presente)
- estado lógico 0 ( tensão ausente)
De fato, também se o sinal fosse do tipo analógico, seria colocado, conectado
devidamente a uma placa do CLP com um coversor analógico/digital, recebendo entãocomo dado final uma representação binária.
Os módulos de entrada funcionam então, de um certo modo, de interface entre a lógica
interna do CLP e os sinais provenientes do exterior.
Uma das funções desenvolvidas dos módulos de entrada, é aquele de adaptar o nível
e a característica do sinal.
De fato, como a tensão de funcionamento interna do CLP é de 5 Volts, os sinais
provenientes do exterior podem apresentar-se com níveis de tensão diversos, por
exemplo 24V, mas também 48, 110, 220V.
Um dos motivos básicos da escolha destes níveis de tensão para as entradas, é
aquele de poder oferecer as garantias necessárias no ambiente industrial
particularmente repleto de distúrbios e ruídos.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 29/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 29
Em geral os módulos de entradas apresentam, do ponto de vista quantitativo, um
número de entradas múltiplo de dois. Os valores mais usuais são 8, 16, 32 entradas
por módulos. Se trata então do termo de modularidade / densidade.
As funções do modulo de entrada são então resumidas em :
- reconhecimento seguro e confiável do nível zero (0) ou um (1) dos sinais;
- transferência desta informação a lógica interna do CLP;
- proteção da circuito e lógica interna de eventuais sobretensões através do isolamento
ótico;
- supressão de sinais com ruídos e distúrbios;
- adaptação do sinal de entrada aos níveis de tensões da lógica interna da CPU do
CLP.
Módulo de Entrada
Figura 3.3.4.1.1 – Módulo de entrada
Módulo deSaída
Al imentação sensores
Dispositivos de sinais
Módulo deEntrada
UnidadeCentral
Memória dePrograma
Fonte
Processador
Al imentação para os atuadores Atuadores / Sinal ização Luminosa
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 30/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 30
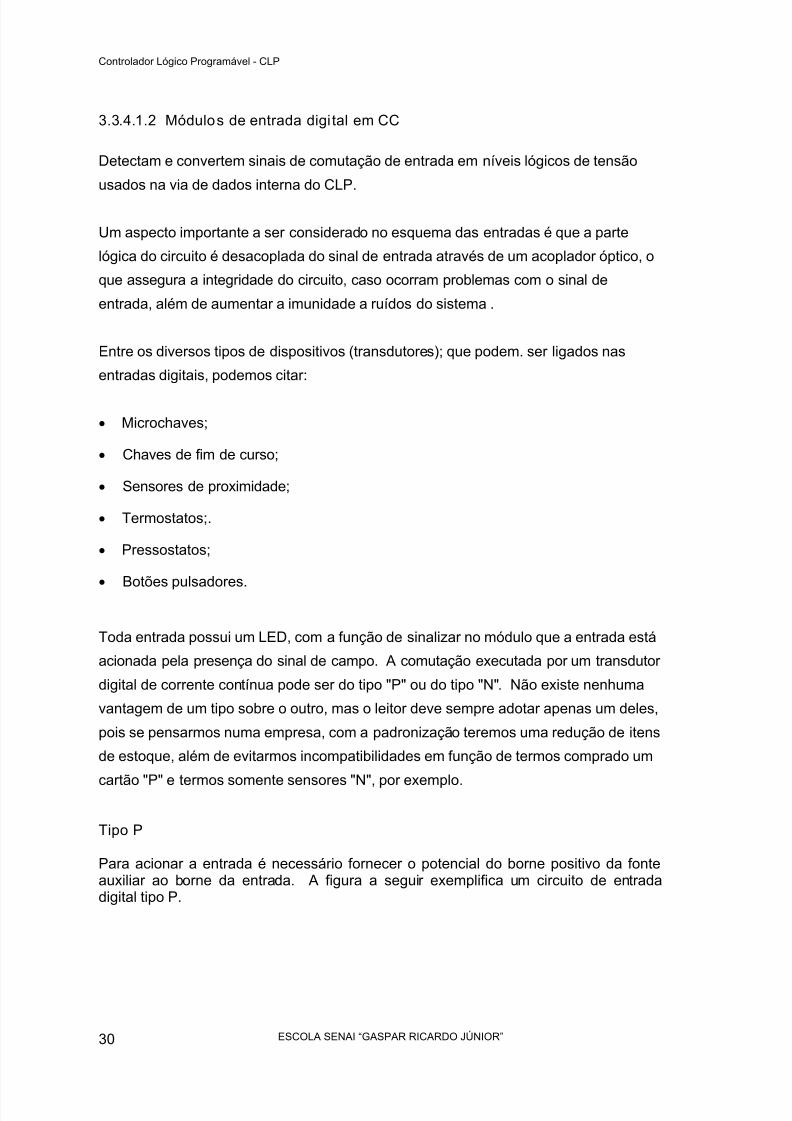
3.3.4.1.2 Módulos de entrada digi tal em CC
Detectam e convertem sinais de comutação de entrada em níveis lógicos de tensão
usados na via de dados interna do CLP.
Um aspecto importante a ser considerado no esquema das entradas é que a parte
lógica do circuito é desacoplada do sinal de entrada através de um acoplador óptico, o
que assegura a integridade do circuito, caso ocorram problemas com o sinal de
entrada, além de aumentar a imunidade a ruídos do sistema .
Entre os diversos tipos de dispositivos (transdutores); que podem. ser ligados nas
entradas digitais, podemos citar:
• Microchaves;
• Chaves de fim de curso;
• Sensores de proximidade;
• Termostatos;.
• Pressostatos;
• Botões pulsadores.
Toda entrada possui um LED, com a função de sinalizar no módulo que a entrada está
acionada pela presença do sinal de campo. A comutação executada por um transdutor
digital de corrente contínua pode ser do tipo "P" ou do tipo "N". Não existe nenhuma
vantagem de um tipo sobre o outro, mas o leitor deve sempre adotar apenas um deles,
pois se pensarmos numa empresa, com a padronização teremos uma redução de itens
de estoque, além de evitarmos incompatibilidades em função de termos comprado um
cartão "P" e termos somente sensores "N", por exemplo.
Tipo P
Para acionar a entrada é necessário fornecer o potencial do borne positivo da fonteauxiliar ao borne da entrada. A figura a seguir exemplifica um circuito de entradadigital tipo P.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 31/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 31
Figura 3.3.4.1.2 – Módulo de entrada tipo P
Tipo N
Para acionar a entrada é necessário fornecer o potencial do borne negativo da fonte
auxiliar ao borne da entrada.
Em ambos os tipos, após o fotoacoplador existe um filtro formado por Cl, R3 e R4, este
filtro fará com que ruídos existentes na alimentação, típicas de ambientes de redes
elétricas industriais, não causem um acionamento indevido no CLP, devido ao filtro,
normalmente as entradas digitais não irão responder a uma freqüência maior que 1
kHz, exceto naquelas entradas especiais de contadores rápidos.
O módulo de entrada digital em nosso CLP é do tipo "P", assim com tensão de 10 até
24 V presente no borne da via temos nível lógico "1 " e o correspondente LED
sinalizador estará acesso. Com uma tensão de O a 6V, ou se a via estiver
desconectada, teremos nível "0" e o LED estará apagado. A via pode ser danificada
caso conectemos a essa entrada tensões superiores a 30 Vcc.
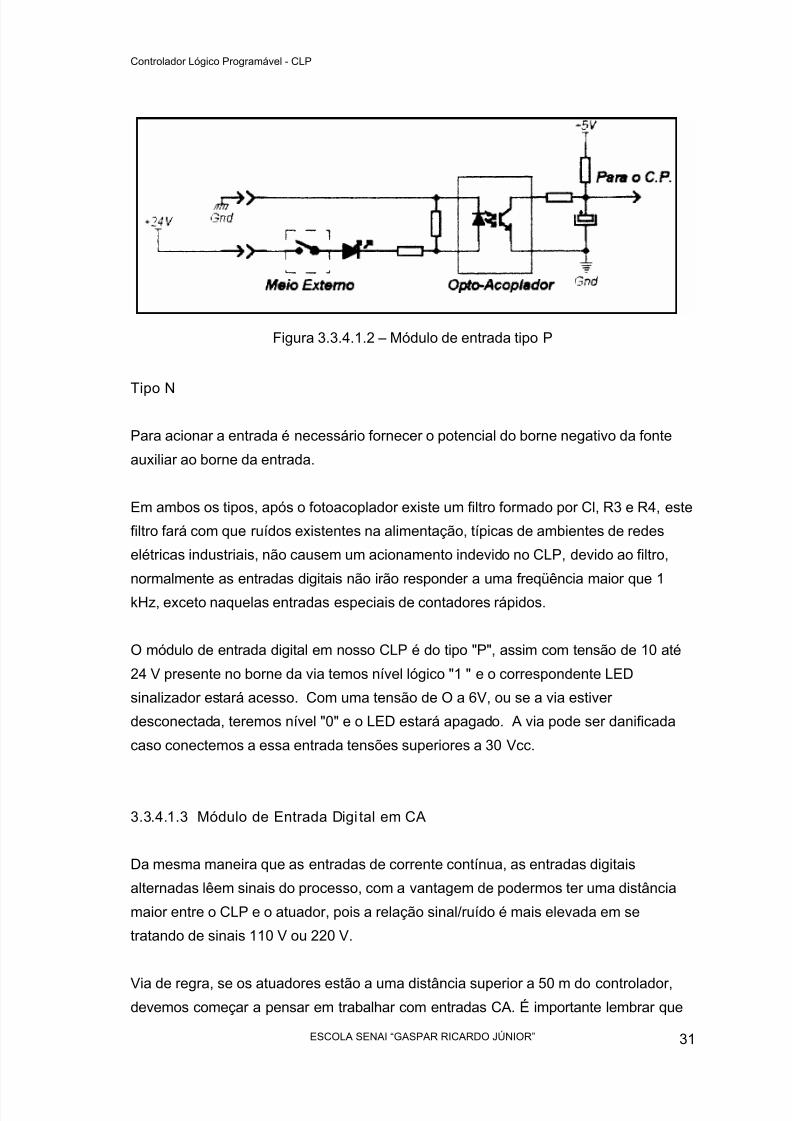
3.3.4.1.3 Módulo de Entrada Digi tal em CA
Da mesma maneira que as entradas de corrente contínua, as entradas digitais
alternadas lêem sinais do processo, com a vantagem de podermos ter uma distância
maior entre o CLP e o atuador, pois a relação sinal/ruído é mais elevada em se
tratando de sinais 110 V ou 220 V.
Via de regra, se os atuadores estão a uma distância superior a 50 m do controlador,devemos começar a pensar em trabalhar com entradas CA. É importante lembrar que
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 32/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 32
trabalhando com níveis CA, devemos tomar mais cuidado com relação à isolação geral
da instalação. Um bom exemplo de aplicação de módulos de entrada CA está em
usinas hidroelétricas, onde os sensores podem estar situados a uma distância de até
500 m.
A figura exemplifica um circuito de entrada digital em corrente alternada.
Figura 3.3.4.1.3 – Módulo de entrada digital CA
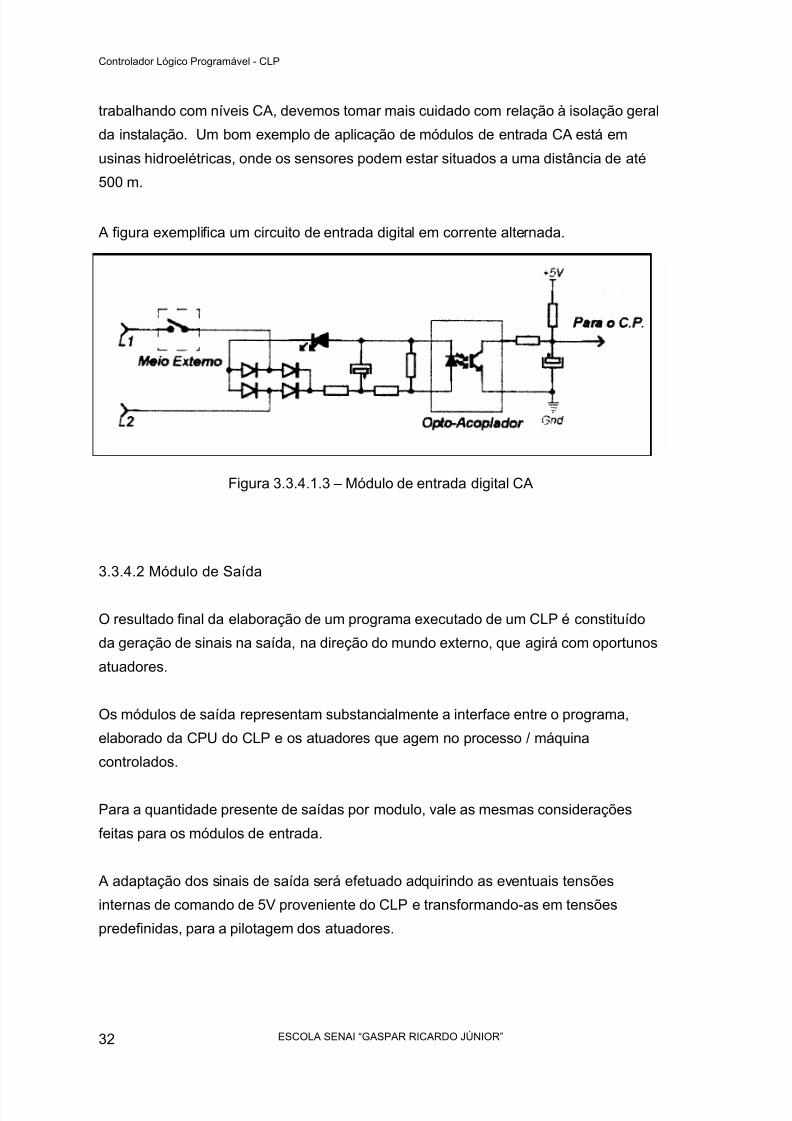
3.3.4.2 Módulo de Saída
O resultado final da elaboração de um programa executado de um CLP é constituído
da geração de sinais na saída, na direção do mundo externo, que agirá com oportunos
atuadores.
Os módulos de saída representam substancialmente a interface entre o programa,
elaborado da CPU do CLP e os atuadores que agem no processo / máquina
controlados.
Para a quantidade presente de saídas por modulo, vale as mesmas considerações
feitas para os módulos de entrada.
A adaptação dos sinais de saída será efetuado adquirindo as eventuais tensões
internas de comando de 5V proveniente do CLP e transformando-as em tensões
predefinidas, para a pilotagem dos atuadores.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 33/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 33
As tensões mais freqüentes utilizadas para o comando dos atuadores são: 5, 24, 60V
em CC ou 48, 115, 220V em CA. Estão presentes também as saídas a relê com
contato seco.
Módulo de Saída
Figura 3.3.4.2 – Módulo de saída
3.3.4.2.1 Módulos de Saída Digi tal CC
Converte sinais lógicos usados no Controlador Programável em sinais próprios
capazes de energizar atuadores, normalmente possuem uma capacidade nominal de
acionamento de 2 A. A figura nos dá uma visão geral do percurso feito pelo sinal de
saída digital.
Dentre os diversos tipos de atuadores, podemos citar:
• Contatores;
• Solenóides;
• Relês;
• Lâmpadas;
• Indicadores.
A comutação executada por uma unidade de saída pode ser em corrente contínua,corrente alternada ou a relês.
Módulo deSaída
Al imentação sensores
Dispositivos de sinais
Módulo deEntrada
UnidadeCentral
Memória dePrograma
Fonte
Processador
Al imentação para os atuadores
Atuadores / Sinal ização Luminosa
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 34/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 34
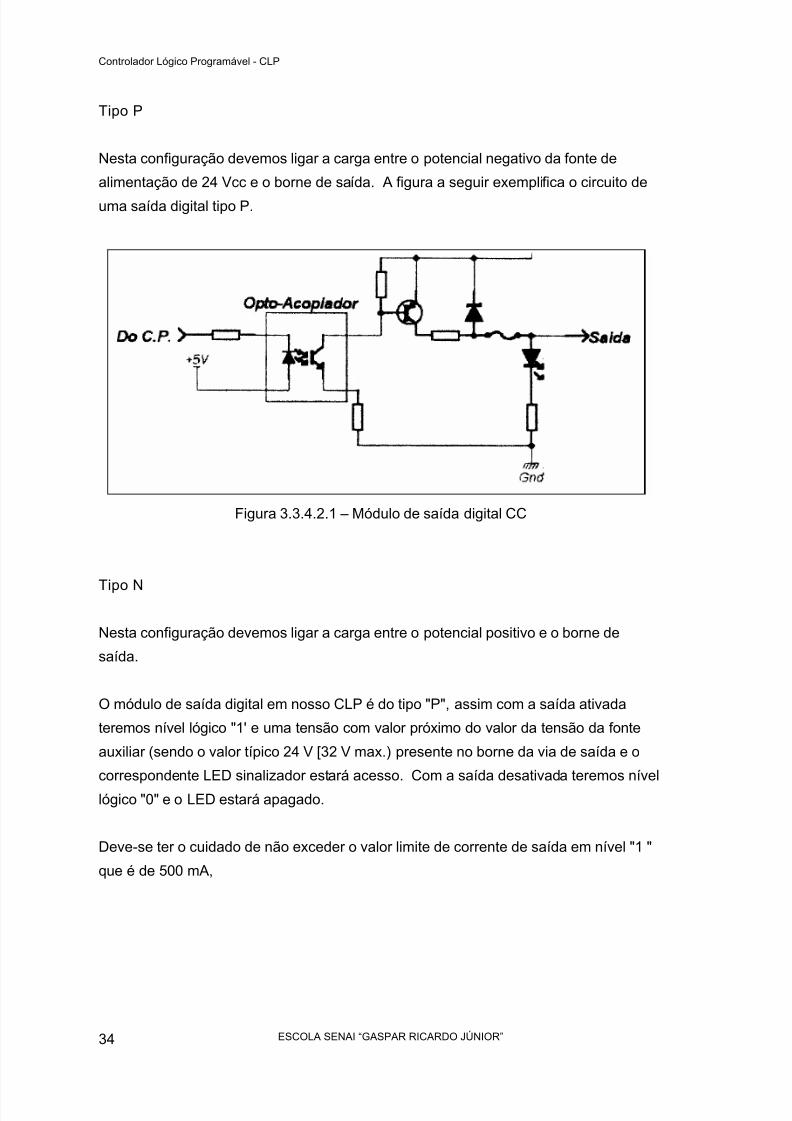
Tipo P
Nesta configuração devemos ligar a carga entre o potencial negativo da fonte de
alimentação de 24 Vcc e o borne de saída. A figura a seguir exemplifica o circuito de
uma saída digital tipo P.
Figura 3.3.4.2.1 – Módulo de saída digital CC
Tipo N
Nesta configuração devemos ligar a carga entre o potencial positivo e o borne de
saída.
O módulo de saída digital em nosso CLP é do tipo "P", assim com a saída ativada
teremos nível lógico "1' e uma tensão com valor próximo do valor da tensão da fonte
auxiliar (sendo o valor típico 24 V [32 V max.) presente no borne da via de saída e o
correspondente LED sinalizador estará acesso. Com a saída desativada teremos nível
lógico "0" e o LED estará apagado.
Deve-se ter o cuidado de não exceder o valor limite de corrente de saída em nível "1 "
que é de 500 mA,
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 35/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 35
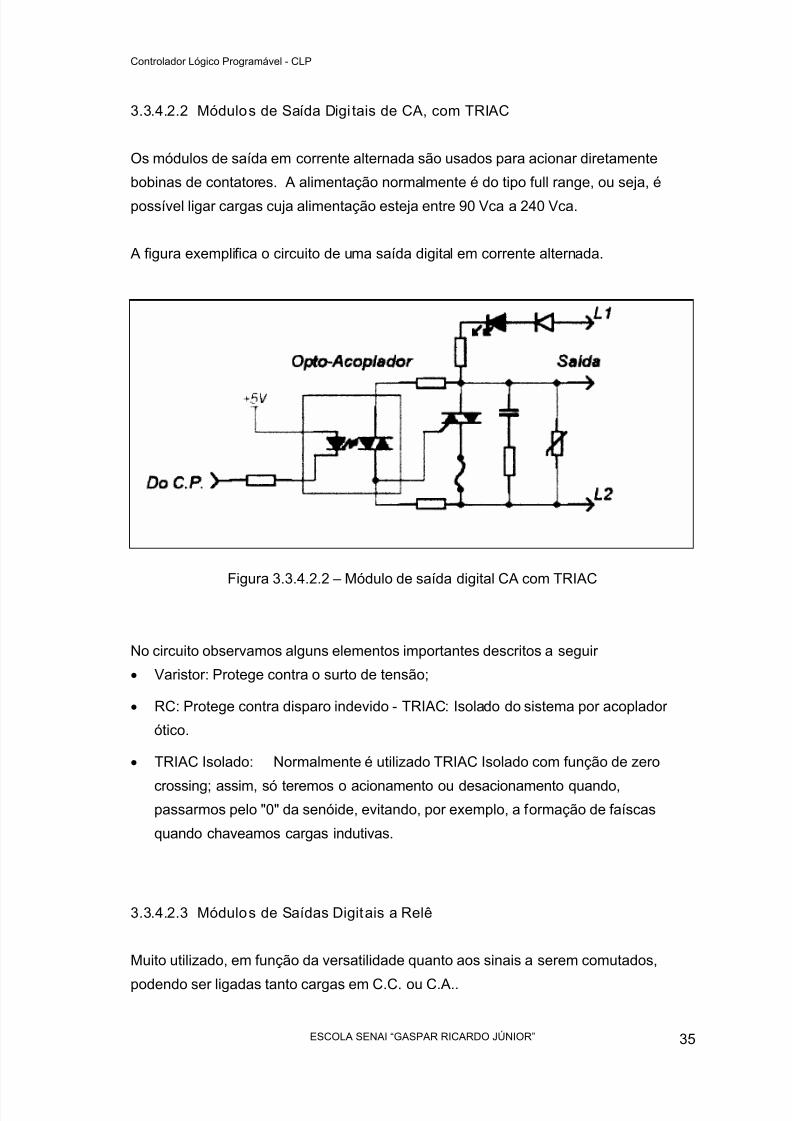
3.3.4.2.2 Módulos de Saída Digi tais de CA, com TRIAC
Os módulos de saída em corrente alternada são usados para acionar diretamente
bobinas de contatores. A alimentação normalmente é do tipo full range, ou seja, é
possível ligar cargas cuja alimentação esteja entre 90 Vca a 240 Vca.
A figura exemplifica o circuito de uma saída digital em corrente alternada.
Figura 3.3.4.2.2 – Módulo de saída digital CA com TRIAC
No circuito observamos alguns elementos importantes descritos a seguir
• Varistor: Protege contra o surto de tensão;
• RC: Protege contra disparo indevido - TRIAC: Isolado do sistema por acoplador
ótico.
• TRIAC Isolado: Normalmente é utilizado TRIAC Isolado com função de zero
crossing; assim, só teremos o acionamento ou desacionamento quando,passarmos pelo "0" da senóide, evitando, por exemplo, a formação de faíscas
quando chaveamos cargas indutivas.
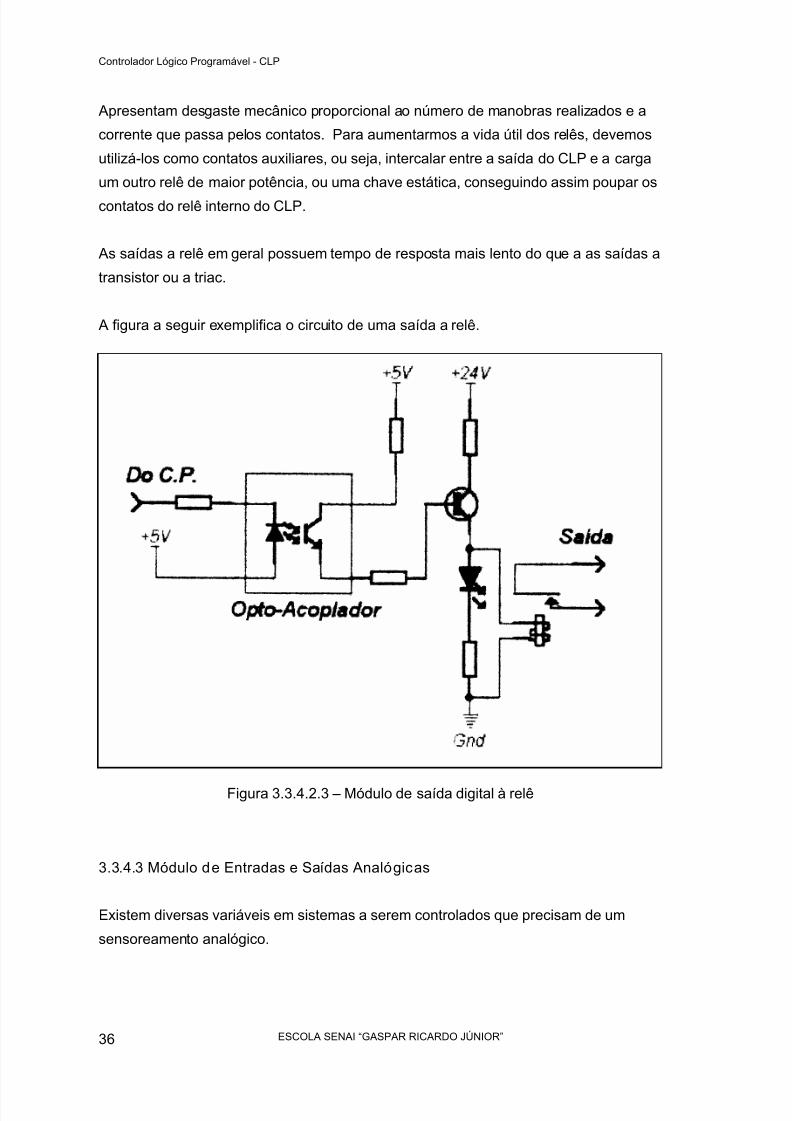
3.3.4.2.3 Módulos de Saídas Digitais a Relê
Muito utilizado, em função da versatilidade quanto aos sinais a serem comutados,
podendo ser ligadas tanto cargas em C.C. ou C.A..
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 36/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 36
Apresentam desgaste mecânico proporcional ao número de manobras realizados e a
corrente que passa pelos contatos. Para aumentarmos a vida útil dos relês, devemos
utilizá-los como contatos auxiliares, ou seja, intercalar entre a saída do CLP e a carga
um outro relê de maior potência, ou uma chave estática, conseguindo assim poupar os
contatos do relê interno do CLP.
As saídas a relê em geral possuem tempo de resposta mais lento do que a as saídas a
transistor ou a triac.
A figura a seguir exemplifica o circuito de uma saída a relê.
Figura 3.3.4.2.3 – Módulo de saída digital à relê
3.3.4.3 Módulo de Entradas e Saídas Analógicas
Existem diversas variáveis em sistemas a serem controlados que precisam de um
sensoreamento analógico.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 37/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 37
Estes sensores analógicos, para fornecerem informações a um CLP, necessitam ser
ligados a interfaces especiais, que convertam o sinal analógico (de tensão e corrente)
em sinais digitais para serem tratados pelo CLP.
Estes módulos são chamados de conversores analógicos. Estas interfaces permitem o
controle de sinais como pressão, temperatura, velocidade, vazão e etc.
Existem módulos de entrada analógica, de saída analógica e com entradas e saídas
analógicas.
As grandezas elétricas tratadas nestes módulos são a tensão ou a corrente. E
normalmente, identificamos estes módulos pelo número de entradas ou saídas, pelo
tipo de grandeza a ser tratada e pelo número de bits que corresponderá a um valoranalógico de entrada ou de saída.
3.3.4.3.1 Unidade de Entrada Analógica
Converte sinais analógicos de entrada (em geral de 0 a 10 Vcc ou 4 a 20 mA) em
valores numéricos na forma binária que são armazenados em registros e podem ser
utilizados pelo controlador programável.
3.3.4.3.2 Unidade de Saída Analóg ica
Possui um conversar D/A que converte valores numéricos na forma binária que se
encontram alocados nos registros do CLP em grandezas analógicas (presets de
pressões, velocidade ou qualquer outro parâmetro em sinal elétrico variável), em geral
na forma de tensão de 0 a 10 Vcc ou de corrente 4 a 20 mA.
Uma saída analógica se presta, basicamente a fornecer sinal analógico para comandar
atuadores analógicos. Dentre os diversos tipos de atuadores analógicos, podemos
citar:
• Motores de CC;
• Inversores de freqüência;
• Válvulas proporcionais;
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 38/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 38
3.3.5 Fontes de Alimentação
As fontes de alimentação são encontradas em módulos externos, independentes das
unidades centrais de processamento e dos módulos de entrada e de saída.
Normalmente, as fontes são do, tipo chaveadas, sendo alimentadas com tensão C.A.
(90 V a 240 V) ou CC (18V a 36V).
Outra preocupação é quanto às tensões fornecidas para o CLP pois além do padrão 5
Vcc, alguns modelos também alimentam os módulos analógicos com +12 Vcc e -12
Vcc. O consumo é por fim outro fator que deve ser analisado, pois em função da
quantidade de pontos a serem utilizados, é que teremos condições de dimensionar a
fonte. Portanto, a fonte deve ser escolhida por último, descobrindo junto ao fabricantequal o modelo de fonte mais adequado ao processo que se deseja automatizar.
Para os CLP de baixo custo, a fonte é incorporada ao módulo da CPU, visando
diminuir encaixes e consequentemente, barateando o produto. Neste caso a
preocupação se resume à alimentação do conjunto, uma vez que tanto as tensões
quanto potências envolvidas serão logicamente compatíveis com o produto.
3.3.6 Módulos Especiais
Os Controladores Programáveis aceitam uma infinidade de módulos especiais, para
que tenhamos uma visão geral, abaixo alguns módulos especiais que poderemos
encontrar:
• Módulo de entrada para termopares (medição de temperatura);
• Módulo de entrada para PT100 (medição de temperatura);
• Módulos de contagem rápida;
• Módulos para controle de motor de passo;
• Módulos para medição de parâmetros elétricos ( cos ϕ, V, 1 , Pot. ativa, Pot.
reativa, Energia, etc.);
• Módulos de comunicação com redes.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 39/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 39
Para encerrar, podemos dizer que o melhor modelo de CLP é aquele que se adequa à
necessidade e, portanto, apresenta as interfaces compatíveis com os sensores e
atuadores a serem interligados.
A diferença entre os modelos está basicamente em sua nomenclatura, simbologia e na
programação.
Sendo assim, podemos dizer que os Controladores Programáveis são muito úteis, mas
devem ter suas características bem especificadas para que possam funcionar a
contento no controle de sistemas.

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 40/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 40
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 41/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 41
4. Revisão dos pré-requisitos
para o curso de CLP
4.1 Sistemas de numeração
Dos sistemas de numeração existentes, os mais utilizados são o decimal, o binário e o
hexadecimal.
4.1.1 Sistema de numeração decimal
O sistema de numeração decimal utiliza dez algarismos para a sua codificação: 0, 1, 2,
3, 4, 5, 6, 7, 8 e 9. Assim, a base desse sistema é dez.
Com esses dez algarismos, é possível representar qualquer grandeza numérica graças
à característica do valor de posição. Desse modo, temos:
• números que representam as unidades: 0, 1, 2, 3, 4, 5, 6, 7, 8, 9.
• números que representam as dezenas: 10, 11, 12, 13, 14, 15 ...; nos quais o
número da posição 1 indica uma dezena e o outro dígito, a unidade.
• números que representam as centenas: 110, 111, 112, 113, 114, 115, 116 ... , nos
quais o valor de posição 1 indica a centena, seguida pela dezena e pela unidade.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 42/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 42
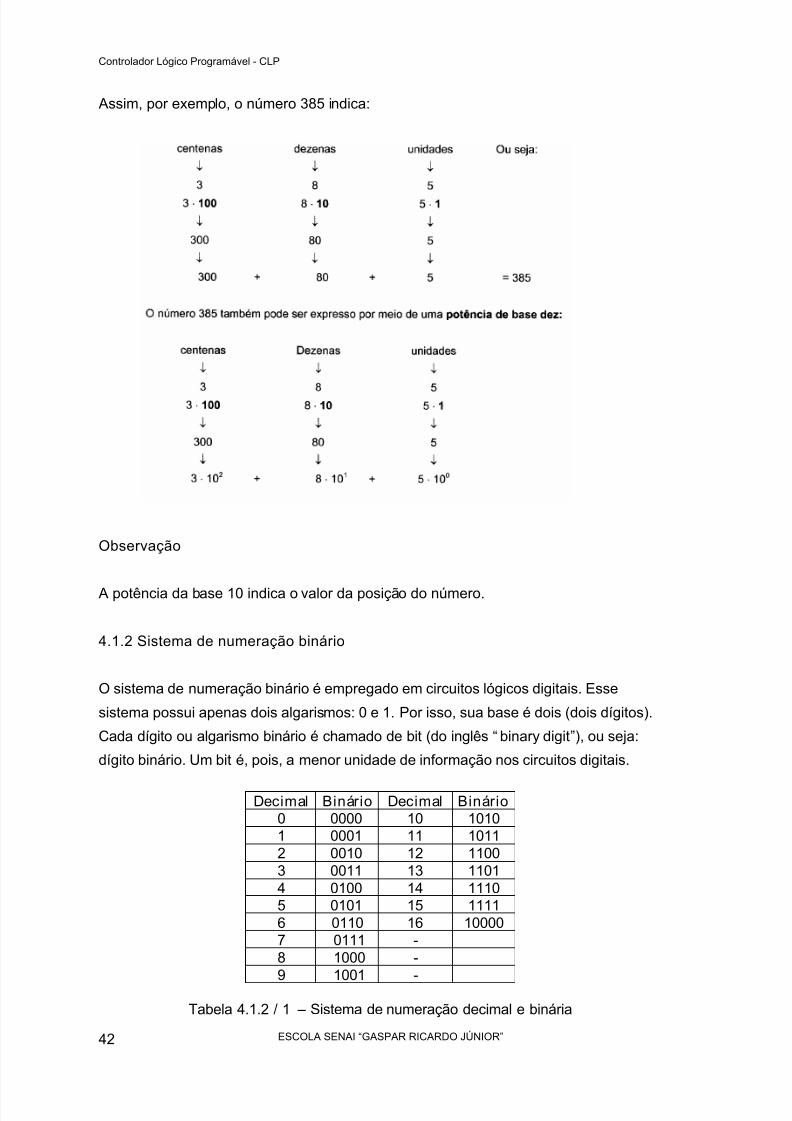
Assim, por exemplo, o número 385 indica:
Observação
A potência da base 10 indica o valor da posição do número.
4.1.2 Sistema de numeração binário
O sistema de numeração binário é empregado em circuitos lógicos digitais. Esse
sistema possui apenas dois algarismos: 0 e 1. Por isso, sua base é dois (dois dígitos).
Cada dígito ou algarismo binário é chamado de bit (do inglês “binary digit”), ou seja:
dígito binário. Um bit é, pois, a menor unidade de informação nos circuitos digitais.
Decimal Binário Decimal Binário0 0000 10 10101 0001 11 10112 0010 12 11003 0011 13 11014 0100 14 11105 0101 15 11116 0110 16 100007 0111 -8 1000 -
9 1001 -Tabela 4.1.2 / 1 – Sistema de numeração decimal e binária
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 43/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 43
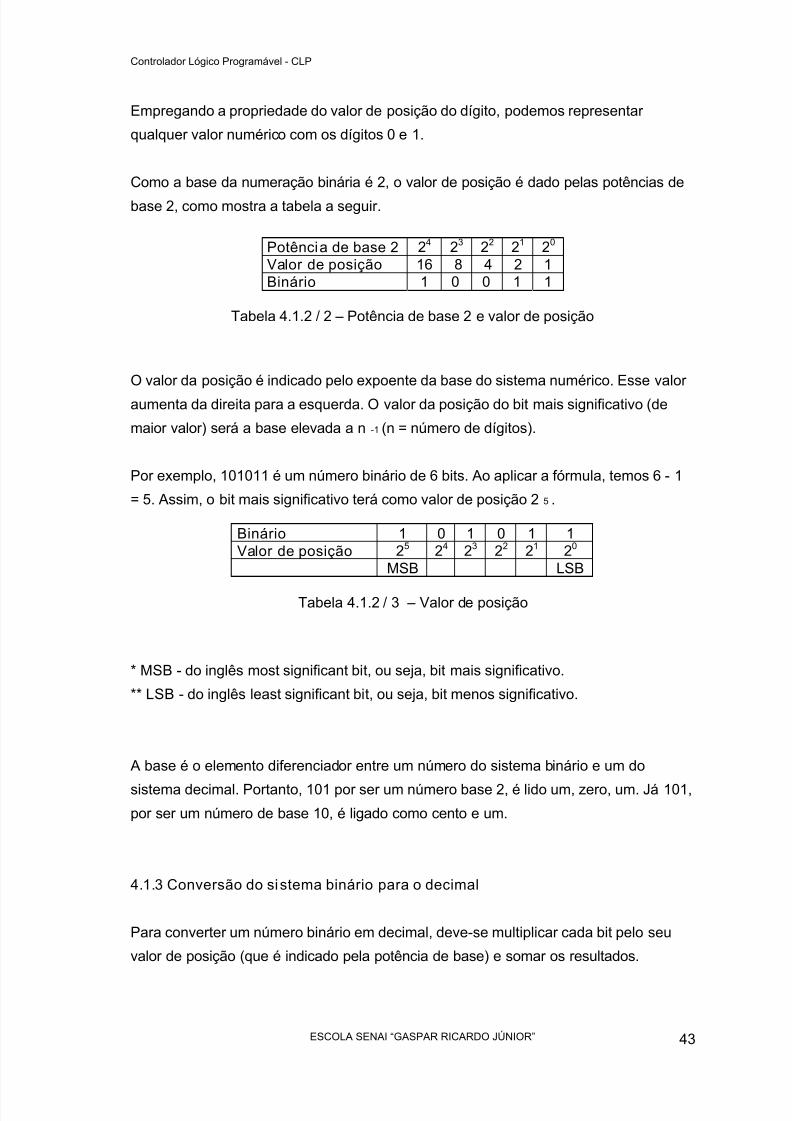
Empregando a propriedade do valor de posição do dígito, podemos representar
qualquer valor numérico com os dígitos 0 e 1.
Como a base da numeração binária é 2, o valor de posição é dado pelas potências de
base 2, como mostra a tabela a seguir.
Potência de base 2 24 23 22 21 20 Valor de posição 16 8 4 2 1Binário 1 0 0 1 1
Tabela 4.1.2 / 2 – Potência de base 2 e valor de posição
O valor da posição é indicado pelo expoente da base do sistema numérico. Esse valor
aumenta da direita para a esquerda. O valor da posição do bit mais significativo (de
maior valor) será a base elevada a n -1 (n = número de dígitos).
Por exemplo, 101011 é um número binário de 6 bits. Ao aplicar a fórmula, temos 6 - 1
= 5. Assim, o bit mais significativo terá como valor de posição 2 5 .
Binário 1 0 1 0 1 1Valor de posição 25 24 23 22 21 20
MSB LSB
Tabela 4.1.2 / 3 – Valor de posição
* MSB - do inglês most significant bit, ou seja, bit mais significativo.
** LSB - do inglês least significant bit, ou seja, bit menos significativo.
A base é o elemento diferenciador entre um número do sistema binário e um do
sistema decimal. Portanto, 101 por ser um número base 2, é lido um, zero, um. Já 101,por ser um número de base 10, é ligado como cento e um.
4.1.3 Conversão do sistema binário para o decimal
Para converter um número binário em decimal, deve-se multiplicar cada bit pelo seu
valor de posição (que é indicado pela potência de base) e somar os resultados.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 44/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 44
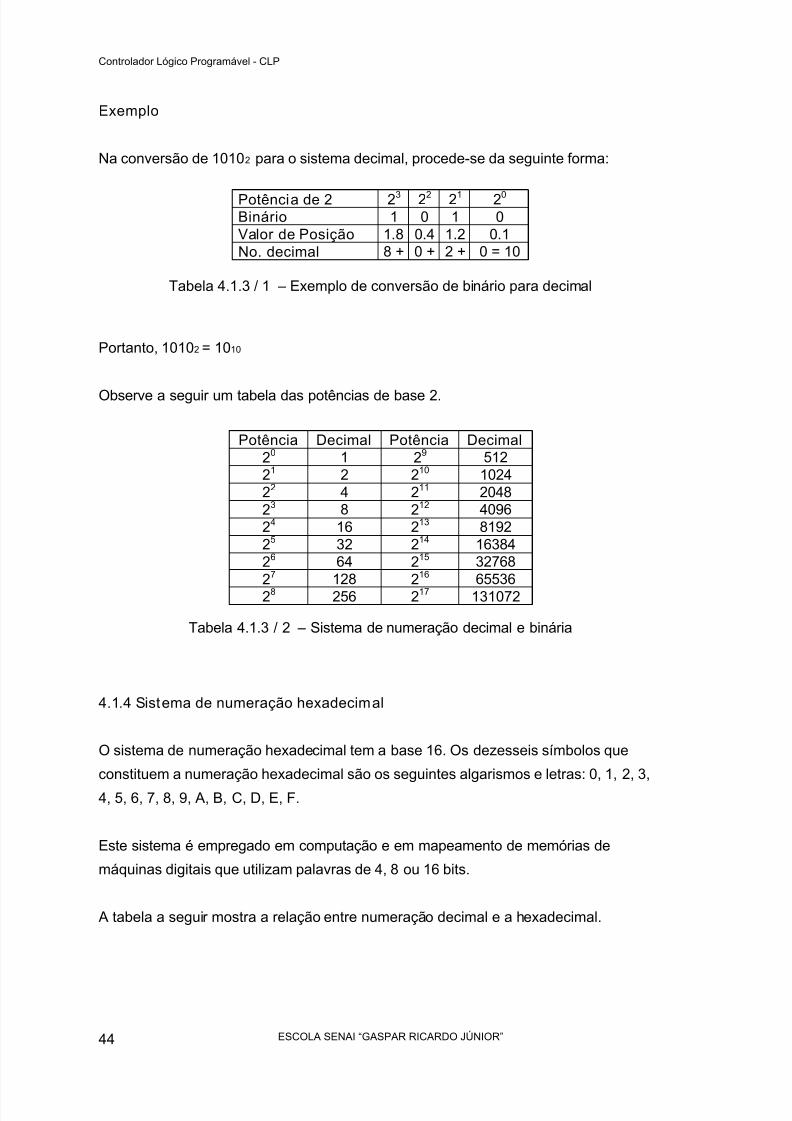
Exemplo
Na conversão de 10102 para o sistema decimal, procede-se da seguinte forma:
Potência de 2 23 22 21 20 Binário 1 0 1 0Valor de Posição 1.8 0.4 1.2 0.1No. decimal 8 + 0 + 2 + 0 = 10
Tabela 4.1.3 / 1 – Exemplo de conversão de binário para decimal
Portanto, 10102 = 1010
Observe a seguir um tabela das potências de base 2.
Potência Decimal Potência Decimal20 1 29 51221 2 210 102422 4 211 204823 8 212 409624 16 213 819225 32 214 1638426 64 215 3276827 128 216 6553628 256 217 131072
Tabela 4.1.3 / 2 – Sistema de numeração decimal e binária
4.1.4 Sistema de numeração hexadecimal
O sistema de numeração hexadecimal tem a base 16. Os dezesseis símbolos que
constituem a numeração hexadecimal são os seguintes algarismos e letras: 0, 1, 2, 3,
4, 5, 6, 7, 8, 9, A, B, C, D, E, F.
Este sistema é empregado em computação e em mapeamento de memórias de
máquinas digitais que utilizam palavras de 4, 8 ou 16 bits.
A tabela a seguir mostra a relação entre numeração decimal e a hexadecimal.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 45/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 45
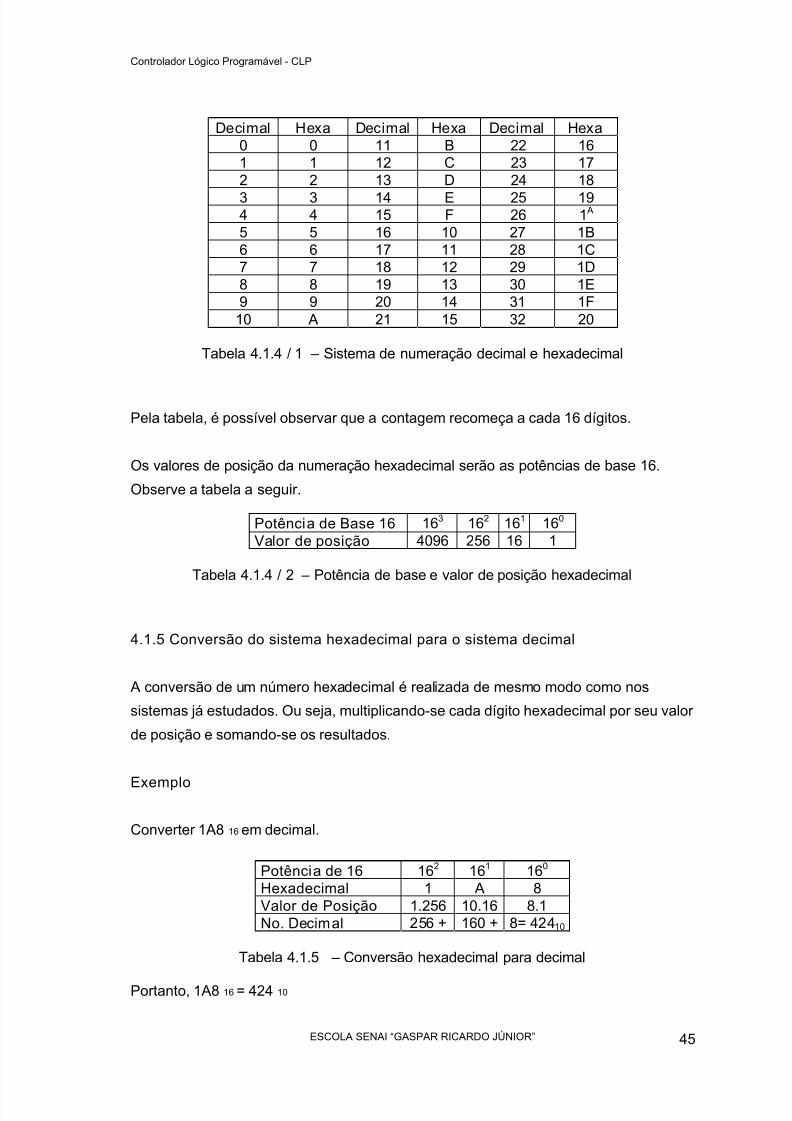
Decimal Hexa Decimal Hexa Decimal Hexa
0 0 11 B 22 161 1 12 C 23 172 2 13 D 24 18
3 3 14 E 25 194 4 15 F 26 1 A 5 5 16 10 27 1B6 6 17 11 28 1C7 7 18 12 29 1D8 8 19 13 30 1E9 9 20 14 31 1F10 A 21 15 32 20
Tabela 4.1.4 / 1 – Sistema de numeração decimal e hexadecimal
Pela tabela, é possível observar que a contagem recomeça a cada 16 dígitos.
Os valores de posição da numeração hexadecimal serão as potências de base 16.
Observe a tabela a seguir.
Potência de Base 16 163 162 161 160 Valor de posição 4096 256 16 1
Tabela 4.1.4 / 2 – Potência de base e valor de posição hexadecimal
4.1.5 Conversão do sistema hexadecimal para o sistema decimal
A conversão de um número hexadecimal é realizada de mesmo modo como nos
sistemas já estudados. Ou seja, multiplicando-se cada dígito hexadecimal por seu valor
de posição e somando-se os resultados.
Exemplo
Converter 1A8 16 em decimal.
Potência de 16 162 161 160 Hexadecimal 1 A 8Valor de Posição 1.256 10.16 8.1No. Decimal 256 + 160 + 8= 42410
Tabela 4.1.5 – Conversão hexadecimal para decimal
Portanto, 1A8 16 = 424 10
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 46/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 46
4.1.6 Conversão do sistema hexadecimal para o sistema binário
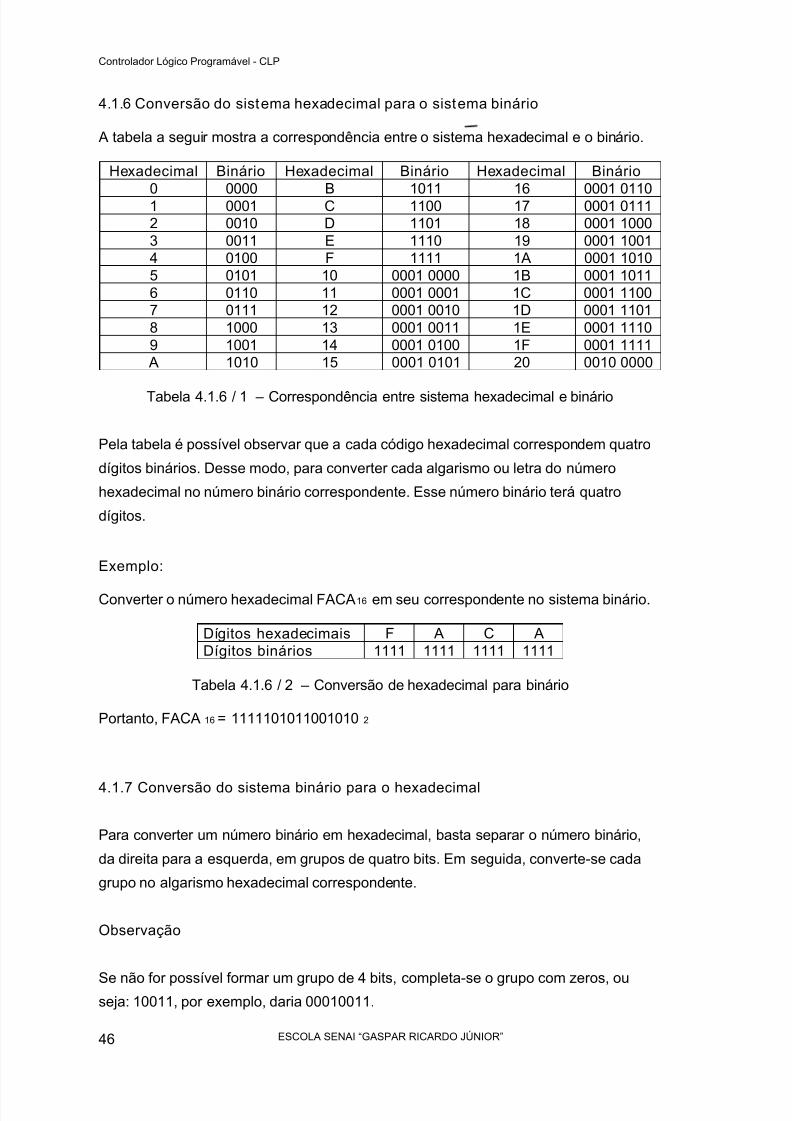
A tabela a seguir mostra a correspondência entre o sistema hexadecimal e o binário.
Hexadecimal Binário Hexadecimal Binário Hexadecimal Binário
0 0000 B 1011 16 0001 01101 0001 C 1100 17 0001 01112 0010 D 1101 18 0001 10003 0011 E 1110 19 0001 10014 0100 F 1111 1A 0001 10105 0101 10 0001 0000 1B 0001 10116 0110 11 0001 0001 1C 0001 11007 0111 12 0001 0010 1D 0001 11018 1000 13 0001 0011 1E 0001 11109 1001 14 0001 0100 1F 0001 1111
A 1010 15 0001 0101 20 0010 0000
Tabela 4.1.6 / 1 – Correspondência entre sistema hexadecimal e binário
Pela tabela é possível observar que a cada código hexadecimal correspondem quatro
dígitos binários. Desse modo, para converter cada algarismo ou letra do número
hexadecimal no número binário correspondente. Esse número binário terá quatro
dígitos.
Exemplo:
Converter o número hexadecimal FACA16 em seu correspondente no sistema binário.
Dígitos hexadecimais F A C ADígitos binários 1111 1111 1111 1111
Tabela 4.1.6 / 2 – Conversão de hexadecimal para binário
Portanto, FACA 16 = 1111101011001010 2
4.1.7 Conversão do sistema binário para o hexadecimal
Para converter um número binário em hexadecimal, basta separar o número binário,
da direita para a esquerda, em grupos de quatro bits. Em seguida, converte-se cada
grupo no algarismo hexadecimal correspondente.
Observação
Se não for possível formar um grupo de 4 bits, completa-se o grupo com zeros, ouseja: 10011, por exemplo, daria 00010011.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 47/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 47
Exemplo:
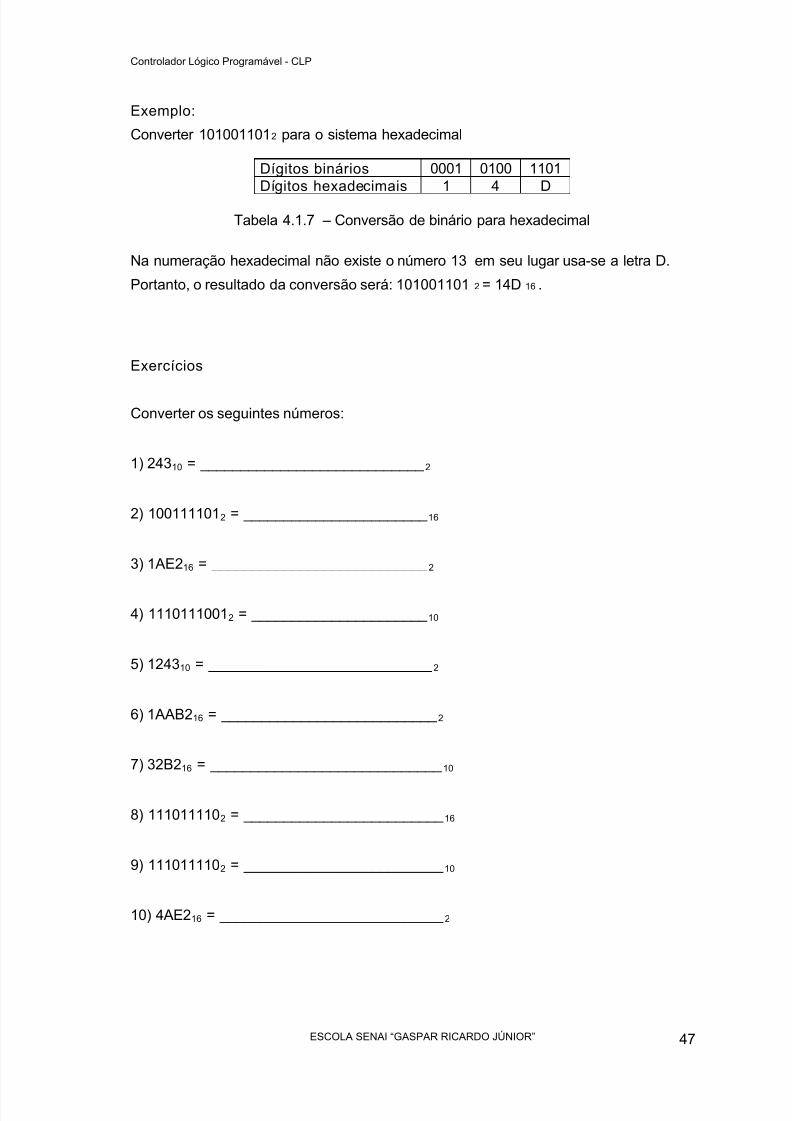
Converter 1010011012 para o sistema hexadecimal
Dígitos binários 0001 0100 1101Dígitos hexadecimais 1 4 D
Tabela 4.1.7 – Conversão de binário para hexadecimal
Na numeração hexadecimal não existe o número 13 em seu lugar usa-se a letra D.
Portanto, o resultado da conversão será: 101001101 2 = 14D 16 .
Exercícios
Converter os seguintes números:
1) 24310 = ____________________________ 2
2) 1001111012 = _______________________ 16
3) 1AE216 = ___________________________ 2
4) 11101110012 = ______________________ 10
5) 124310 = ____________________________ 2
6) 1AAB216 = ___________________________ 2
7) 32B216 = _____________________________ 10
8) 1110111102 = _________________________ 16
9) 1110111102 = _________________________ 10
10) 4AE216 = ____________________________ 2
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 48/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 48
4.2 Circuitos Digitais
Os circuitos eletrônicos são divididos em dois grupos: circuitos analógicos e circuitos
digitais.
Nos circuitos analógicos, os componentes operam normalmente de forma contínua ou
linear, como, por exemplo os amplificadores e as fontes reguladas.
Os circuitos digitais, também chamados de chaveadores, empregam componentes que
operam nos estados de corte ou saturação. É o caso de um transistor que, conectado
a um circuito, em um momento está cortado e no outro, saturado.
A partir deste momento, vamos começar a estudar os circuitos digitais. Antes, porém,serão apresentados conceitos básicos que você deverá aprender a fim de
compreender melhor o funcionamento desse tipo de circuito.
Eles são: estados ou níveis lógicos, funções lógicas e operações lógicas.
4.2.1 Estados ou níveis lógicos
Em sistemas digitais, trabalha-se com dois estados ou níveis lógicos, pois a eletrônica
digital apoia-se no princípio da lógica que considera uma proposição verdadeira ou
falsa.
Assim, um ponto qualquer do circuito digital pode assumir apenas um de dois estados:
• Ligado ou desligado;
• Saturado ou cortado;
• Alto ou baixo;
• Com pulso ou sem pulso;
• Fechado ou aberto;
Suponhamos, por exemplo, um circuito em que uma lâmpada é acionada por um
interruptor. Nesse caso, a lâmpada pode assumir os dois estados: ligado ou desligado.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 49/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 49
Um relê, dentro de um circuito, assume os estados energizado ou desenergizado. Do
mesmo modo, um transistor ligado como chave no circuito pode assumir os estados
saturado ou em corte.
Os sistemas digitais processam apenas os números binários 1 (um) e 0 (zero). Isso
significa que se associarmos o valor binário 1 a um estado ou nível lógico,
associaremos o valor binário 0 ao outro estado.
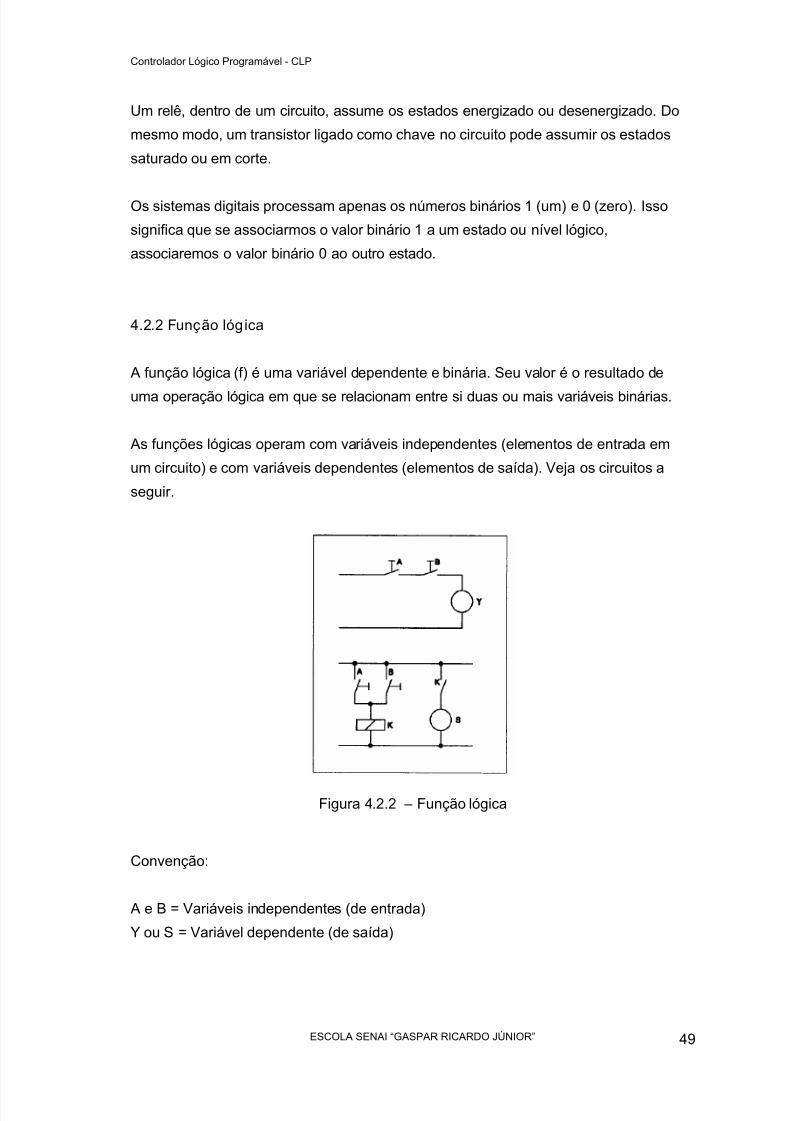
4.2.2 Função lógica
A função lógica (f) é uma variável dependente e binária. Seu valor é o resultado de
uma operação lógica em que se relacionam entre si duas ou mais variáveis binárias.
As funções lógicas operam com variáveis independentes (elementos de entrada em
um circuito) e com variáveis dependentes (elementos de saída). Veja os circuitos a
seguir.
Figura 4.2.2 – Função lógica
Convenção:
A e B = Variáveis independentes (de entrada)
Y ou S = Variável dependente (de saída)
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 50/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 50
Normalmente, as variáveis lógicas independentes (de entrada) são representadas por
letras maiúsculas A, B, C... N; as variáveis dependentes (de saída), por S ou Y. As
funções lógicas têm apenas dois estados: o estado 0 e o estado 1.
4.2.3 Operações lógicas
A relação entre duas ou mais variáveis que representam estados é estabelecidaatravés de operações lógicas.
As operações lógicas são:
• produto ou multiplicação lógica;
• soma lógica;
• inversão.
Essas operações, nos circuitos ou sistemas lógicos, são efetuadas por blocos
denominados portas lógicas.
4.2.4 Portas lógicas básicas
Portas são unidades básicas de sistemas lógicos eletrônicos.
Porta lógica é qualquer arranjo físico capaz de efetuar uma operação lógica. As portas
lógicas operam com números binários, ou seja, com os dois estados lógicos 1 e 0.
Os sistemas digitais, mesmo os mais complexos como os computadores, são
constituídos a partir de portas lógicas básicas.
As portas lógicas básicas são três:
• a porta E que realiza a operação produto ou multiplicação lógica;
• a porta OU que realiza a operação soma lógica;
• a porta NÃO ou inversora que realiza a operação inversão, ou negação ou
complementação.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 51/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 51
4.2.4.1 Porta E (AND)
A função E é aquela que assume o valor 1 quando todas as variáveis de entrada forem
iguais a 1; e assume o valor 0 quando uma ou todas as variáveis de entrada forem
iguais a 0.
A operação E ( AND em inglês), é a multiplicação ou o produto lógico de duas ou mais
variáveis binárias. Essa operação pode ser expressa da seguinte maneira:
Y = A • B.
Essa expressão é lida da seguintes forma: a saída (Y) é igual A e B.
Observação
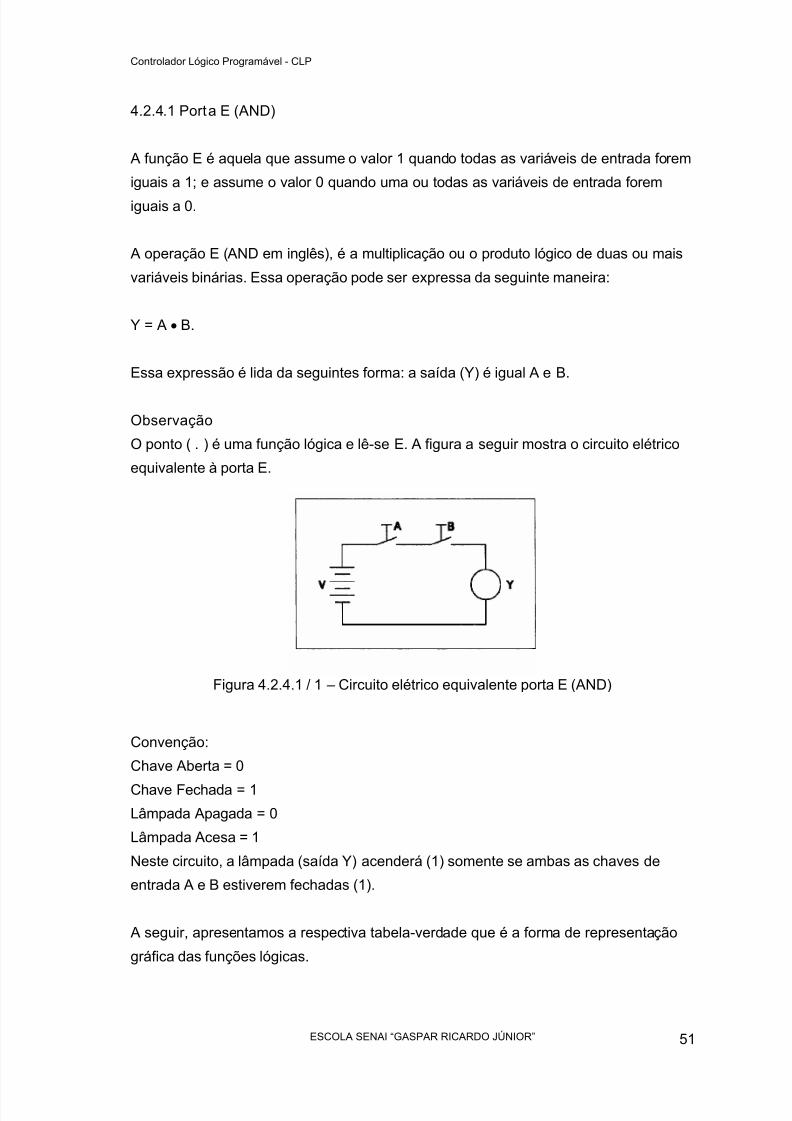
O ponto ( . ) é uma função lógica e lê-se E. A figura a seguir mostra o circuito elétrico
equivalente à porta E.
Figura 4.2.4.1 / 1 – Circuito elétrico equivalente porta E (AND)
Convenção:
Chave Aberta = 0
Chave Fechada = 1Lâmpada Apagada = 0
Lâmpada Acesa = 1
Neste circuito, a lâmpada (saída Y) acenderá (1) somente se ambas as chaves de
entrada A e B estiverem fechadas (1).
A seguir, apresentamos a respectiva tabela-verdade que é a forma de representação
gráfica das funções lógicas.

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 52/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 52
Tabela 4.2.4.1 – Tabela verdade função E (AND)
Os símbolos ou blocos lógicos para a porta E são mostrados a seguir. Observe as
duas variáveis de entrada A e B e a saída Y.
Figura 4.2.4.1 / 2 – Símbolo porta lógica E ( AND)
Muitas vezes, um circuito lógico tem três variáveis, ou seja, uma porta E de três
entradas (A, B e C) e uma saída (Y). Neste caso, a operação será expressa assim:
A . B . C = Y ou Y = A . B . C.
4.2.4.2 Porta OU (OR)
A função OU é aquela que assume valor 1 quando uma ou mais variáveis de entrada
forem iguais a 1; e assume o valor 0 quando todas as variáveis de entrada forem iguais
a 0.
A operação OU, executada pela porta OU (OR em inglês) é a soma lógica de duas ou
mais variáveis binárias. Essa operação é expressa do seguinte modo: Y = A + B.
A expressão é lida da seguinte forma: a saída Y é igual A ou B.

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 53/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 53
Observação
O símbolo (+) nesta expressão significa OU.
A figura a seguir mostra o circuito elétrico equivalente à porta OU.
Figura 4.2.4.2 / 1 – Circuito elétrico equivalente porta OU (OR)
Convenção:
Chave Aberta = 0
Chave Fechada = 1
Lâmpada Apagada = 0
Lâmpada Acesa = 1
A lâmpada (Y) acenderá quando ou a chave A ou a chave B estiver fechada. Ela
também acenderá quando A e B estiverem fechadas. Quando A e B estiverem abertas,
a lâmpada não acenderá.
A seguir veja as combinações possíveis das chaves e também a tabela-verdade dafunção OU.

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 54/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 54
Tabela 4.2.4.1 – Tabela verdade função OU (OR)
Observe, nas tabelas, como a saída do circuito OU é ativada quando pelo menos uma
ou todas as chaves estiverem fechadas.
Os símbolos lógicos da porta OU com duas entradas (A e B) e a saída (Y) estão
esquematizados na ilustração a seguir.
Figura 4.2.4.2 / 2 – Símbolo porta lógica OU (OR)
Uma porta OU de três entradas apresenta as variáveis A, B e C para as entradas e Y
para a saída. Neste caso, a operação será expressa da seguinte forma:
A + B + C = Y
4.2.4.3 Porta NÃO
A função NÃO, ou função complemento, ou ainda, função inversora é a que inverte o
estado da variável de entrada. Se a variável de entrada for 1, ela se tornará 0 na saída.
Se a variável de entrada for 0, ela se tornará 1 na saída.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 55/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 55
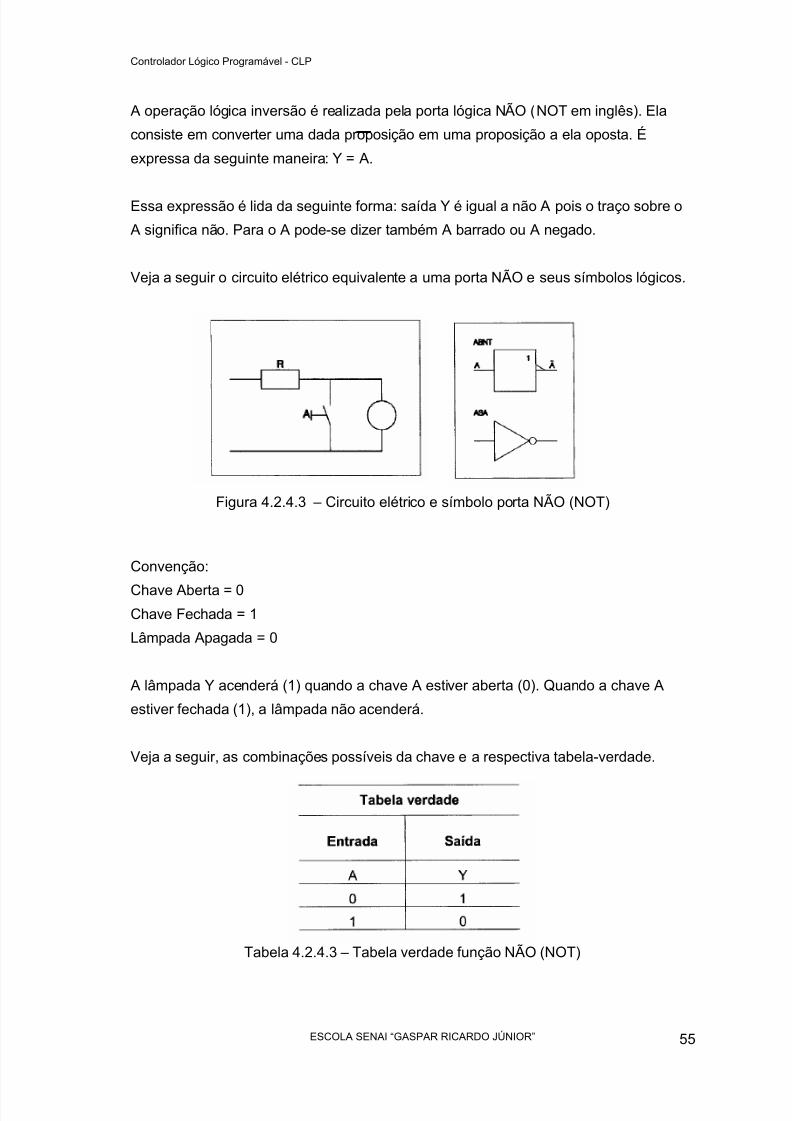
A operação lógica inversão é realizada pela porta lógica NÃO (NOT em inglês). Ela
consiste em converter uma dada proposição em uma proposição a ela oposta. É
expressa da seguinte maneira: Y = A.
Essa expressão é lida da seguinte forma: saída Y é igual a não A pois o traço sobre o
A significa não. Para o A pode-se dizer também A barrado ou A negado.
Veja a seguir o circuito elétrico equivalente a uma porta NÃO e seus símbolos lógicos.
Figura 4.2.4.3 – Circuito elétrico e símbolo porta NÃO (NOT)
Convenção:
Chave Aberta = 0Chave Fechada = 1
Lâmpada Apagada = 0
A lâmpada Y acenderá (1) quando a chave A estiver aberta (0). Quando a chave A
estiver fechada (1), a lâmpada não acenderá.
Veja a seguir, as combinações possíveis da chave e a respectiva tabela-verdade.
Tabela 4.2.4.3 – Tabela verdade função NÃO (NOT)
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 56/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 56
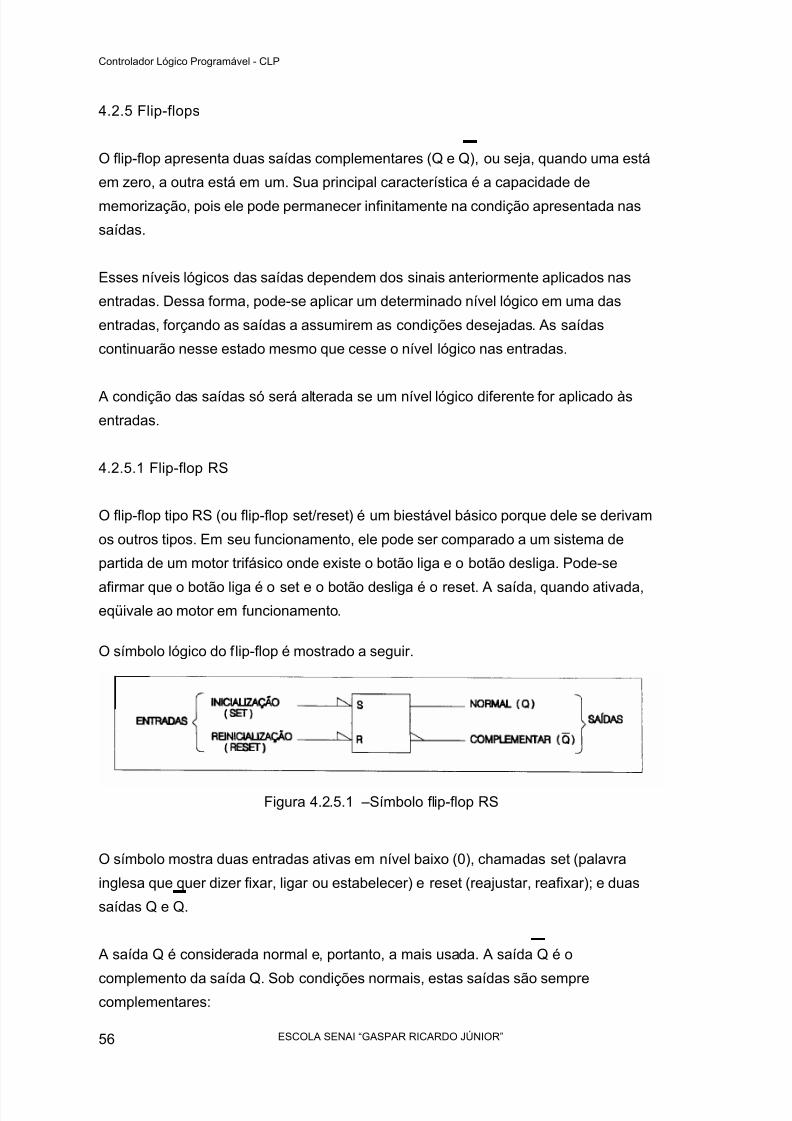
4.2.5 Flip-flops
O flip-flop apresenta duas saídas complementares (Q e Q), ou seja, quando uma está
em zero, a outra está em um. Sua principal característica é a capacidade de
memorização, pois ele pode permanecer infinitamente na condição apresentada nas
saídas.
Esses níveis lógicos das saídas dependem dos sinais anteriormente aplicados nas
entradas. Dessa forma, pode-se aplicar um determinado nível lógico em uma das
entradas, forçando as saídas a assumirem as condições desejadas. As saídas
continuarão nesse estado mesmo que cesse o nível lógico nas entradas.
A condição das saídas só será alterada se um nível lógico diferente for aplicado àsentradas.
4.2.5.1 Flip-flop RS
O flip-flop tipo RS (ou flip-flop set/reset) é um biestável básico porque dele se derivam
os outros tipos. Em seu funcionamento, ele pode ser comparado a um sistema de
partida de um motor trifásico onde existe o botão liga e o botão desliga. Pode-se
afirmar que o botão liga é o set e o botão desliga é o reset. A saída, quando ativada,eqüivale ao motor em funcionamento.
O símbolo lógico do flip-flop é mostrado a seguir.
Figura 4.2.5.1 –Símbolo flip-flop RS
O símbolo mostra duas entradas ativas em nível baixo (0), chamadas set (palavra
inglesa que quer dizer fixar, ligar ou estabelecer) e reset (reajustar, reafixar); e duas
saídas Q e Q.
A saída Q é considerada normal e, portanto, a mais usada. A saída Q é o
complemento da saída Q. Sob condições normais, estas saídas são semprecomplementares:
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 57/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 57
Q = 1 .Q= 0 Q = 0 .Q= 1
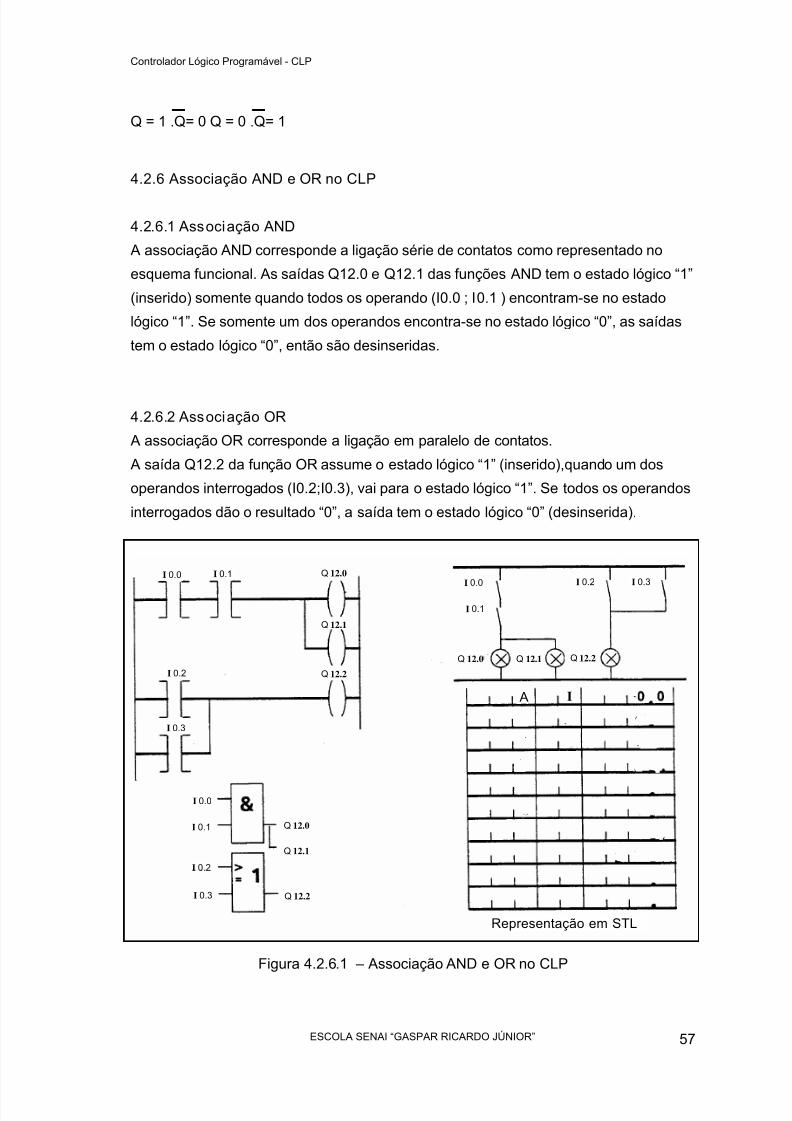
4.2.6 Associação AND e OR no CLP
4.2.6.1 Associação AND
A associação AND corresponde a ligação série de contatos como representado no
esquema funcional. As saídas Q12.0 e Q12.1 das funções AND tem o estado lógico “1”
(inserido) somente quando todos os operando (I0.0 ; I0.1 ) encontram-se no estado
lógico “1”. Se somente um dos operandos encontra-se no estado lógico “0”, as saídas
tem o estado lógico “0”, então são desinseridas.
4.2.6.2 Associação OR
A associação OR corresponde a ligação em paralelo de contatos.
A saída Q12.2 da função OR assume o estado lógico “1” (inserido),quando um dos
operandos interrogados (I0.2;I0.3), vai para o estado lógico “1”. Se todos os operandos
interrogados dão o resultado “0”, a saída tem o estado lógico “0” (desinserida).
Figura 4.2.6.1 – Associação AND e OR no CLP
Representação em STL
A I
I 0.2
I 0.3
I 0.0 I 0.1 I 0.2 I 0.0
I 0.1
I 0.3
I 0.2
I 0.0
I 0.1
I 0.3
Q 12.0
Q 12.1
Q 12.2
Q 12.0 Q 12.1 Q 12.2
Q 12.0
Q 12.1
Q 12.2

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 58/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 58
4.2.6.3 Associação AND Antes de OR
A associação AND antes de OR e uma ligação em paralelo de diversos contatos em
série.
Nestes ramos, constituídos de circuitos em série e em paralelo, a saída Q12.0
apresenta o nível lógico “1” (energizada) quando pela menos em um ramo todos os
contatos ligados em série, ou o contato individual I 0.5, estiverem fechados (tiverem
nível lógico “1”).
Figura 4.2.6.3 – Associação AND antes de OR
4.2.6.4 Associação OR Antes de AND
A associação OR antes de AND e uma ligação em série de diversos contatos ligados
em paralelo.
Q 12.0
Q 12.0
I 0.0
I 0.1
I 0.2
I 0.3
I 0.4
I 0.5
Q 12.0
I 0.0
I 0.0
I 0.1
I 0.1
I 0.2
I 0.2
I 0.3
I 0.3
I 0.4
I 0.4
I 0.5
I 0.5
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 59/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 59
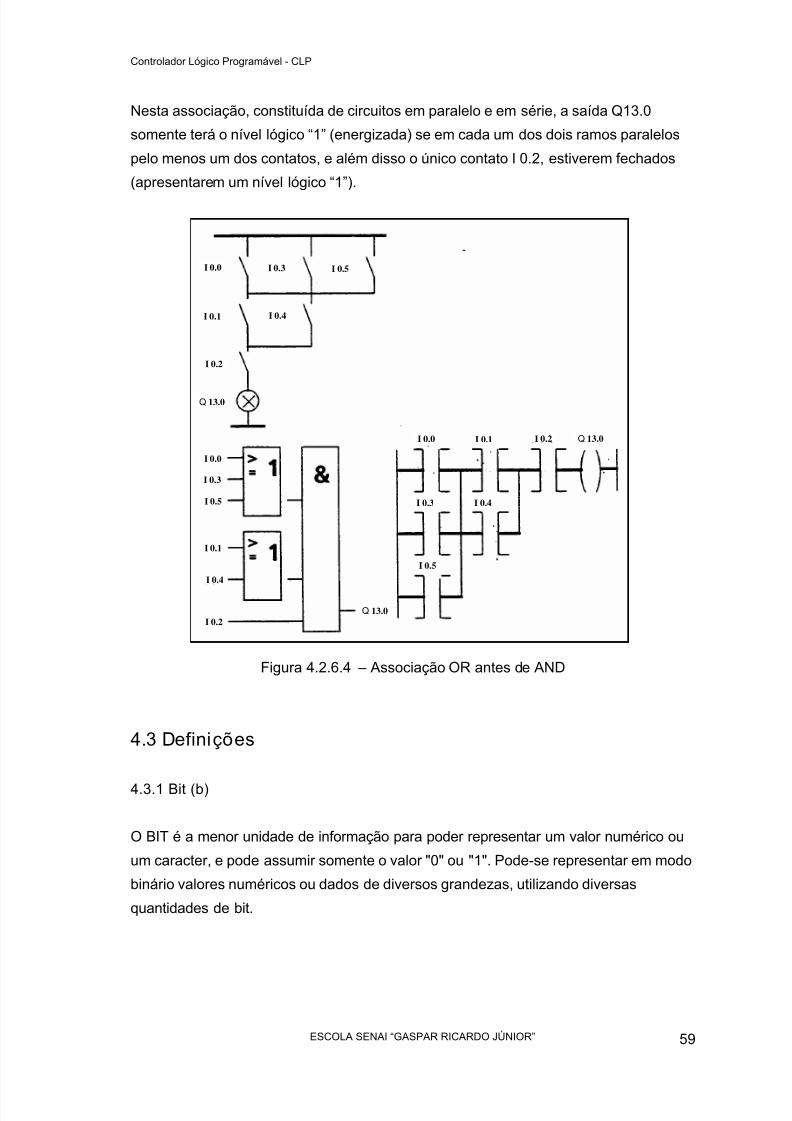
Nesta associação, constituída de circuitos em paralelo e em série, a saída Q13.0
somente terá o nível lógico “1” (energizada) se em cada um dos dois ramos paralelos
pelo menos um dos contatos, e além disso o único contato I 0.2, estiverem fechados
(apresentarem um nível lógico “1”).
Figura 4.2.6.4 – Associação OR antes de AND
4.3 Definições
4.3.1 Bit (b)
O BIT é a menor unidade de informação para poder representar um valor numérico ou
um caracter, e pode assumir somente o valor "0" ou "1". Pode-se representar em modo
binário valores numéricos ou dados de diversos grandezas, utilizando diversas
quantidades de bit.
Q 13.0
I 0.0
I 0.1
I 0.2
I 0.3
I 0.4
I 0.5
Q 13.0I 0.0 I 0.1 I 0.2
I 0.3 I 0.4
I 0.5
Q 13.0
I 0.0
I 0.1
I 0.2
I 0.3
I 0.4
I 0.5
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 60/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 60
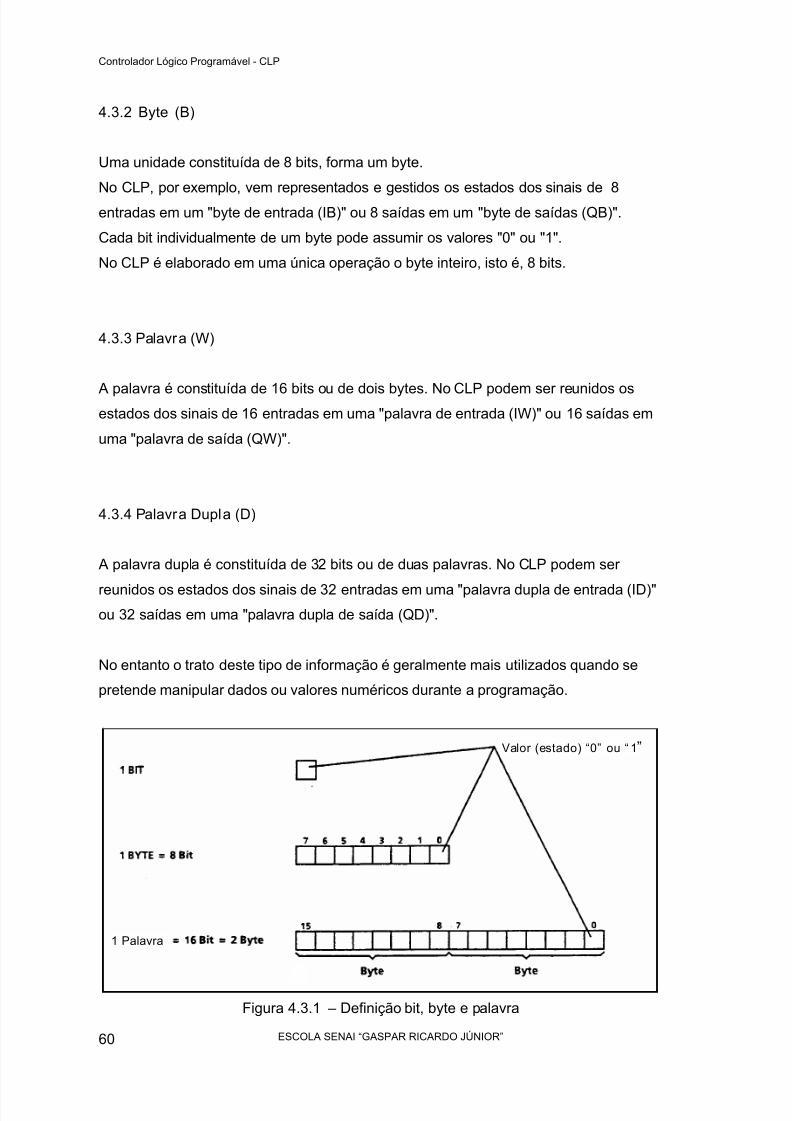
4.3.2 Byte (B)
Uma unidade constituída de 8 bits, forma um byte.
No CLP, por exemplo, vem representados e gestidos os estados dos sinais de 8
entradas em um "byte de entrada (IB)" ou 8 saídas em um "byte de saídas (QB)".
Cada bit individualmente de um byte pode assumir os valores "0" ou "1".
No CLP é elaborado em uma única operação o byte inteiro, isto é, 8 bits.
4.3.3 Palavra (W)
A palavra é constituída de 16 bits ou de dois bytes. No CLP podem ser reunidos osestados dos sinais de 16 entradas em uma "palavra de entrada (IW)" ou 16 saídas em
uma "palavra de saída (QW)".
4.3.4 Palavra Dupla (D)
A palavra dupla é constituída de 32 bits ou de duas palavras. No CLP podem ser
reunidos os estados dos sinais de 32 entradas em uma "palavra dupla de entrada (ID)"ou 32 saídas em uma "palavra dupla de saída (QD)".
No entanto o trato deste tipo de informação é geralmente mais utilizados quando se
pretende manipular dados ou valores numéricos durante a programação.
Figura 4.3.1 – Definição bit, byte e palavra
1 Palavra
Valor (estado) “0” ou “ 1”
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 61/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 61
4.4 Endereçamento do Bi t, Byte e Palavra
4.4.1 Endereçamento do bit
Para permitir a interrogação de cada um dos bits ao interno de um byte, vem
assinalado a cada um desses um número, definido como endereço de bit. Em cada
byte este endereço parte do primeiro bit a direita com o número 0, para chegar com o
número 7, ao último bit da esquerda do byte.
4.4.2 Endereçamento do byte
Também a cada um byte vem assinalado um número, definido como endereço do byte.
Além deste número, vem especificado o tipo de operando que o byte representa, por
exemplo IB 2 representa um byte de entrada, ou QB 4 representa um byte de saída.
Cada bit vem então identificado do próprio endereço de byte e de bit. O endereço do
bit vem dividido do endereço do bit através de um ponto. A direita do ponto se
encontra o endereço do bit, a esquerda o endereço do byte.
I 3.5 identifica a entrada digital com endereço do byte 3 e endereço do bit 5; Q 5.2
identifica a saída digital com endereço do byte 5 e o endereço do bit 2.
4.4.3 Endereço da Palavra
A numeração das palavras identificam os endereços das mesmas.
IW2 identifica a palavra de entrada 2, constituída dos bytes de entrada 2 (IB2) e 3
(IB3); QW6 identifica a palavra de saída 6 constituída dos bytes de saída 6 (QB6) e 7
(QB7).
Atenção: Com o emprego da palavras, por exemplo IW, QW, MW, etc. o endereço da
palavra é sempre o endereço menor dos dois bytes que a constituem.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 62/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 62
4.5 Estados dos Sinais
Os dois estados “com tensão” ou “sem tensão”, são de maneira distinta reconhecidos.
Na técnica da automação são expressos:
estado do sinal "0" = sem tensão = OFF
estado do sinal "1" = com tensão = ON
4.5.1 Sinal Binário
Os dois estados correspondem ao dois valores que cada um sinal binário (bit) pode
assumir. O conceito de sinal binário não vem utilizado somente para descrever o
estado das entradas e das saídas, mas também para descrever o estado doselementos que são utilizados na elaboração dos sinais no âmbito do funcionamento
lógico do CLP.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 63/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 63
5. Resultado da Operação
Lógica (RLO)
Cada programa é constituído de uma série de associações que são dispostas
seqüencialmente na memória do programa. Um associação é constituída de uma ou
diversas instruções para a "verificação" do nível lógico de entradas, saídas,
temporizadores, contadores e de uma ou mais instruções para o comando de saídas,
flags, temporizadores e contadores.
Quando do processamento das verificação forma-se um resultado da operação lógica
(RLO). Caso as verificações estejam satisfeitas, o RLO vale "1"; caso elas não sejam
satisfeitas, o RLO vale "0".
O RLO da última operação de verificação determina o nível lógico das saídas, flags,
temporizadores e/ou contadores programados em seguida.
Após o processamento da última verificação de uma associação, o resultado da
associação não se altera mais, sendo então responsável pela execução ou não das
instruções seguintes.
Com o processamento da última instrução desta associação, o resultado anterior da
associação fica sem efeito. Desta maneira, o RLO é limitado. O limite da validade de
um RLO e a passagem de uma operação de terminação de segmento para uma
operação de verificação (primeira verificação), isto é, a passagem, no processamentodo programa, de um segmento para outro.
Com a primeira operação de verificação deste novo segmento, a CPU forma um novo
RLO. O resultado de uma primeira verificação é armazenado sem associação na CPU.
A associação e feita somente quando da segunda verificação. Por este motivo, a
operação de associação AND ou OR de uma primeira verificação não tem significado,
devendo entretanto, ser sempre escrita também devido ao formalismo da programação
e das instruções.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 64/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 64
Lembre-se:
Resultado da operação lógica RLO "1": as condições das verificações estão satisfeitas,
as operações são executadas.
Resultado da operação lógica RLO "0": as condições das verificações não estão
satisfeitas, as operações não são executadas.
(exceto a operação "=", que com RLO '1" energiza a saída, o flag, etc. e no caso de
RLO "'0" desenergiza os mesmos.)
Caso seja ultrapassado um limite entre duas associações forma-se um novo RLO.
5.1 First Check
A designação first check (primeira checagem) indica que está sendo executada a
primeira instrução de uma lógica. Isto significa que uma nova operação lógica se
iníciou, e que o resultado (RLO) da operação lógica anterior não será considerado.
Isto torna-se sem importância, se utilizada uma instrução AND ou OR como primeira
instrução de uma lógica em STL. O first check é gerado automaticamente pelo CLPsempre que uma lógica foi encerrada (por ex. uma saída foi setada ) ou um novo bloco
foi iniciado.
RLO – Resultado da Operação Lógica
Figura 5 – RLO (resultado da operação lógica)
I I
I 0.2
I
Q
Q 12.0
Q 12.1
Q 12.2
I
A
A
A
PrimeiraIn terr o a ão Efeito do
resultadológico
Associ ação AND
Associ açãoOR
.........= Limi teentre duas
combinaçõeslógicas
LAD FBD STL
I
I 0.0
I
I 0.1
I 0.2
I 0.2
I
I 0.3
Q 12.0
Q 12.1
Q 12.2
Q 12.2
Q 12.1
Q 12.0
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 65/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 65
6. Descrição da CPU S7-200
A série S7-200 é uma linha de controladores programáveis de dimensões reduzidas
(Micro CLP) da Siemens, com capacidade de controlar uma variedade de aplicações
de automação. A figura 6 representa um Micro CLP S7-200. O desing compacto, a
expansibilidade, o baixo custo e um vasto set’s de instruções fazem deste controlador
uma solução ótima para o controle de pequenos sistemas automatizados. Além disto, a
ampla gama de modelos de CPU com diversas tensões de alimentação permitem uma
flexibilidade necessária nas diversas aplicações industriais.
Figura 6 – CPU S7-200
6.1 CPU S7-200
A CPU S7-200 reuni a unidade central de processamento, a fonte e as entradas e
saídas digitais em um único dispositivo autônomo e compacto.
• A CPU executa o programa e memoriza os dados para o controle de processo;
• Acrescentando unidades de expansão é possível aumentar o número de I/O
(entradas e saídas) da CPU até as dimensões físicas máximas de cada versão;
• A fonte fornece energia as unidades de base, bem como para as unidades de
expansão conectadas;
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 66/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 66
• As entradas e saídas constituem os pontos de controle do sistema: as entradas
controlam os sinais provenientes de dispositivos de campo (sensores, fim-de-curso,
contatos); as saídas controlam atuadores, bombas e outros dispositivos do
processo;
• A interface de comunicação permite ligar a CPU a um outro dispositivo de
programação ou outros CLP´s;
• Os LED´s de estado fornecem informações do funcionamento da CPU (Run ou
Stop), o estado atual do I/O (entradas e saídas ) locais e os erros de sistemas
ocorridos;
• Em algumas CPU´s o relógio de hardware já está integrado, em outras é
necessário inserir um módulo de relógio;
• Um módulo de EEPROM serial plug-in consente de memorizar os programas daCPU a fim de transferir para uma outra CPU ou realizar back-up’s;
• Um módulo de bateria plug-in consente de aumentar a retenção dos dados da
memória RAM.
6.2 Requisitos de Hardware
A figura 6.2 ilustra o sistema de base do micro CLP S7-200, constituído de uma CPU
S7-200, um microcomputador pessoal, um software de programação STEP 7-Micro
/WIN 32 e um cabo de comunicação.
Para poder usar o microcomputador pessoal (PC) deve-se dispor de um dos seguintes
itens:
• Cabo PC/PPI;
• Unidade para processador de comunicação (CP) e cabo para interface multiponto
(MPI);
• Placa para interface multiponto (MPI). A placa MPI é fornecida com um cabo MPI;
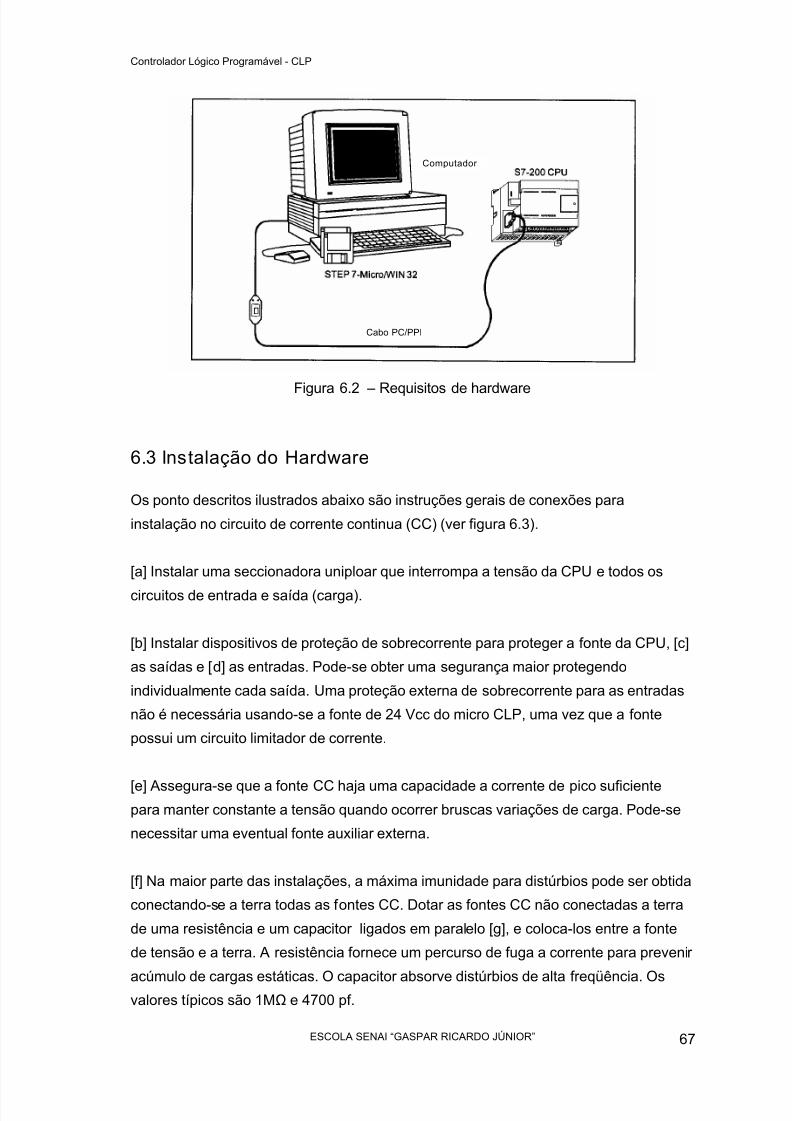
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 67/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 67
Figura 6.2 – Requisitos de hardware
6.3 Instalação do Hardware
Os ponto descritos ilustrados abaixo são instruções gerais de conexões para
instalação no circuito de corrente continua (CC) (ver figura 6.3).
[a] Instalar uma seccionadora uniploar que interrompa a tensão da CPU e todos os
circuitos de entrada e saída (carga).
[b] Instalar dispositivos de proteção de sobrecorrente para proteger a fonte da CPU, [c]
as saídas e [d] as entradas. Pode-se obter uma segurança maior protegendo
individualmente cada saída. Uma proteção externa de sobrecorrente para as entradas
não é necessária usando-se a fonte de 24 Vcc do micro CLP, uma vez que a fonte
possui um circuito limitador de corrente.
[e] Assegura-se que a fonte CC haja uma capacidade a corrente de pico suficientepara manter constante a tensão quando ocorrer bruscas variações de carga. Pode-se
necessitar uma eventual fonte auxiliar externa.
[f] Na maior parte das instalações, a máxima imunidade para distúrbios pode ser obtida
conectando-se a terra todas as fontes CC. Dotar as fontes CC não conectadas a terra
de uma resistência e um capacitor ligados em paralelo [g], e coloca-los entre a fonte
de tensão e a terra. A resistência fornece um percurso de fuga a corrente para prevenir
acúmulo de cargas estáticas. O capacitor absorve distúrbios de alta freqüência. Osvalores típicos são 1MΩ e 4700 pf.
Computador
Cabo PC/PPI
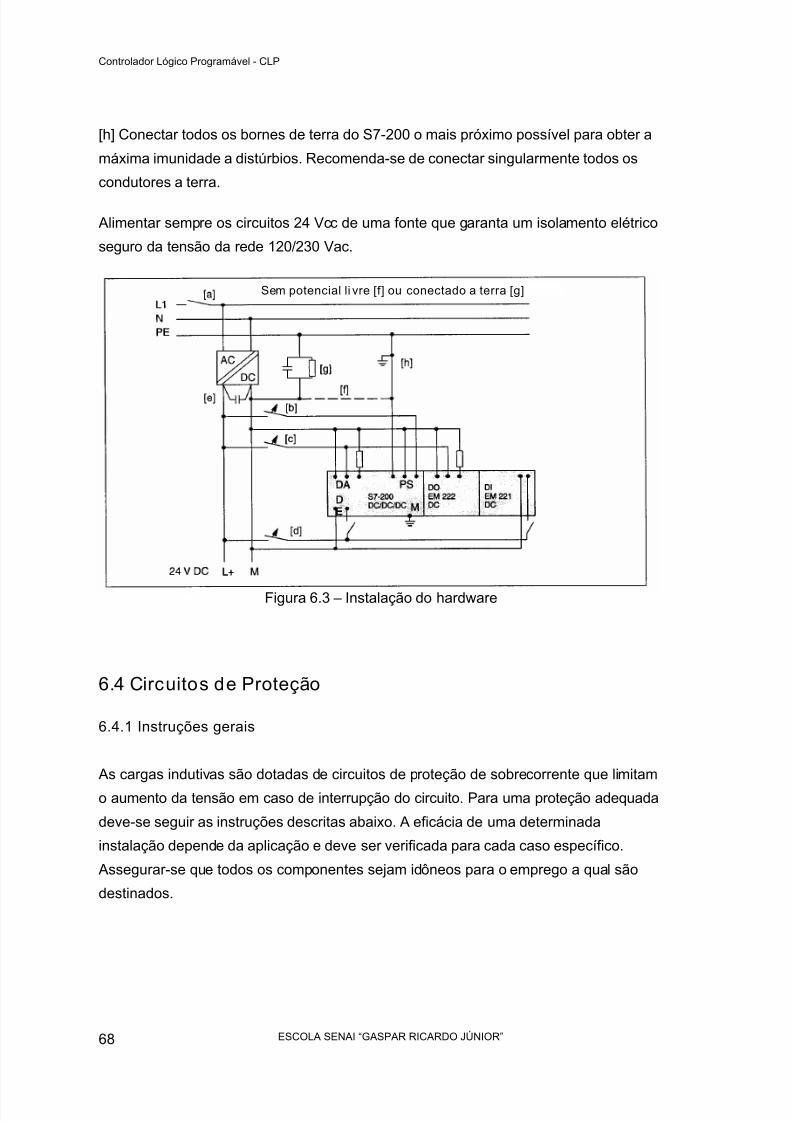
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 68/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 68
Sem potencial li vre [f] ou conectado a terra [g]
[h] Conectar todos os bornes de terra do S7-200 o mais próximo possível para obter a
máxima imunidade a distúrbios. Recomenda-se de conectar singularmente todos os
condutores a terra.
Alimentar sempre os circuitos 24 Vcc de uma fonte que garanta um isolamento elétrico
seguro da tensão da rede 120/230 Vac.
Figura 6.3 – Instalação do hardware
6.4 Circuitos de Proteção
6.4.1 Instruções gerais
As cargas indutivas são dotadas de circuitos de proteção de sobrecorrente que limitam
o aumento da tensão em caso de interrupção do circuito. Para uma proteção adequada
deve-se seguir as instruções descritas abaixo. A eficácia de uma determinada
instalação depende da aplicação e deve ser verificada para cada caso específico.
Assegurar-se que todos os componentes sejam idôneos para o emprego a qual são
destinados.
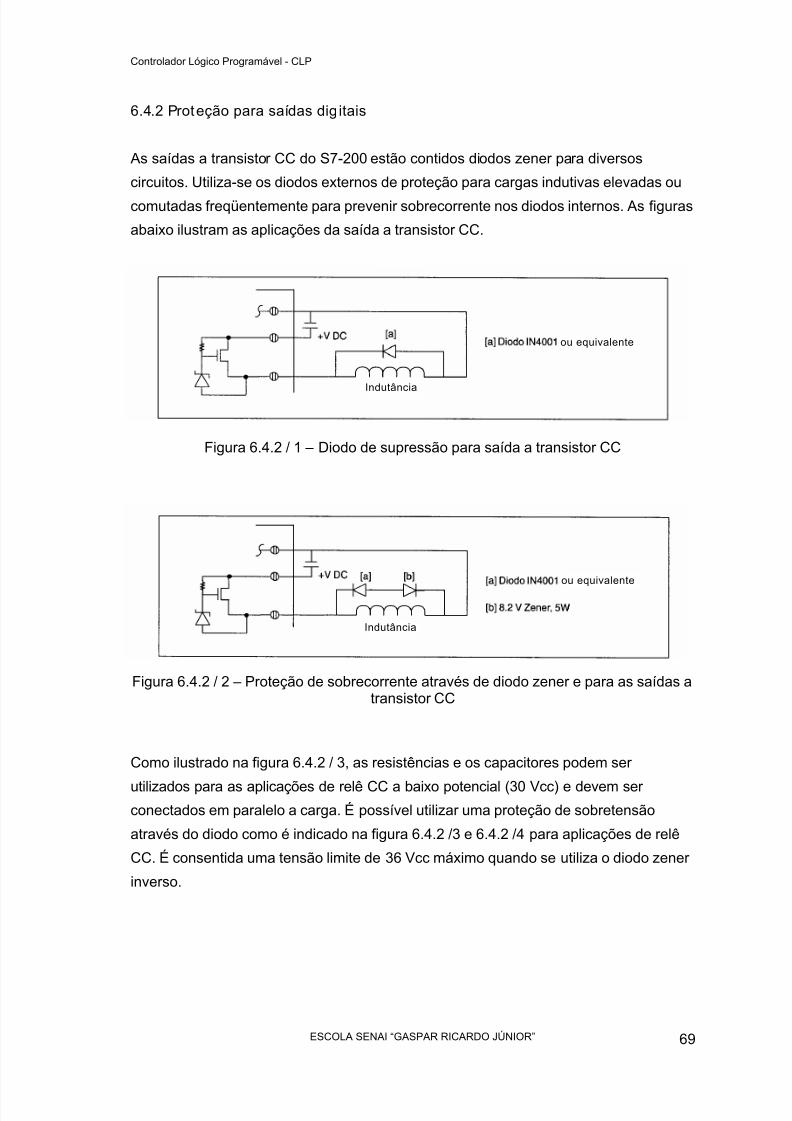
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 69/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 69
6.4.2 Proteção para saídas dig itais
As saídas a transistor CC do S7-200 estão contidos diodos zener para diversos
circuitos. Utiliza-se os diodos externos de proteção para cargas indutivas elevadas ou
comutadas freqüentemente para prevenir sobrecorrente nos diodos internos. As figuras
abaixo ilustram as aplicações da saída a transistor CC.
Figura 6.4.2 / 1 – Diodo de supressão para saída a transistor CC
Figura 6.4.2 / 2 – Proteção de sobrecorrente através de diodo zener e para as saídas atransistor CC
Como ilustrado na figura 6.4.2 / 3, as resistências e os capacitores podem ser
utilizados para as aplicações de relê CC a baixo potencial (30 Vcc) e devem serconectados em paralelo a carga. É possível utilizar uma proteção de sobretensão
através do diodo como é indicado na figura 6.4.2 /3 e 6.4.2 /4 para aplicações de relê
CC. É consentida uma tensão limite de 36 Vcc máximo quando se utiliza o diodo zener
inverso.
Indutância
ou equivalente
Indutância
ou equivalente
Indutância
ou equivalente
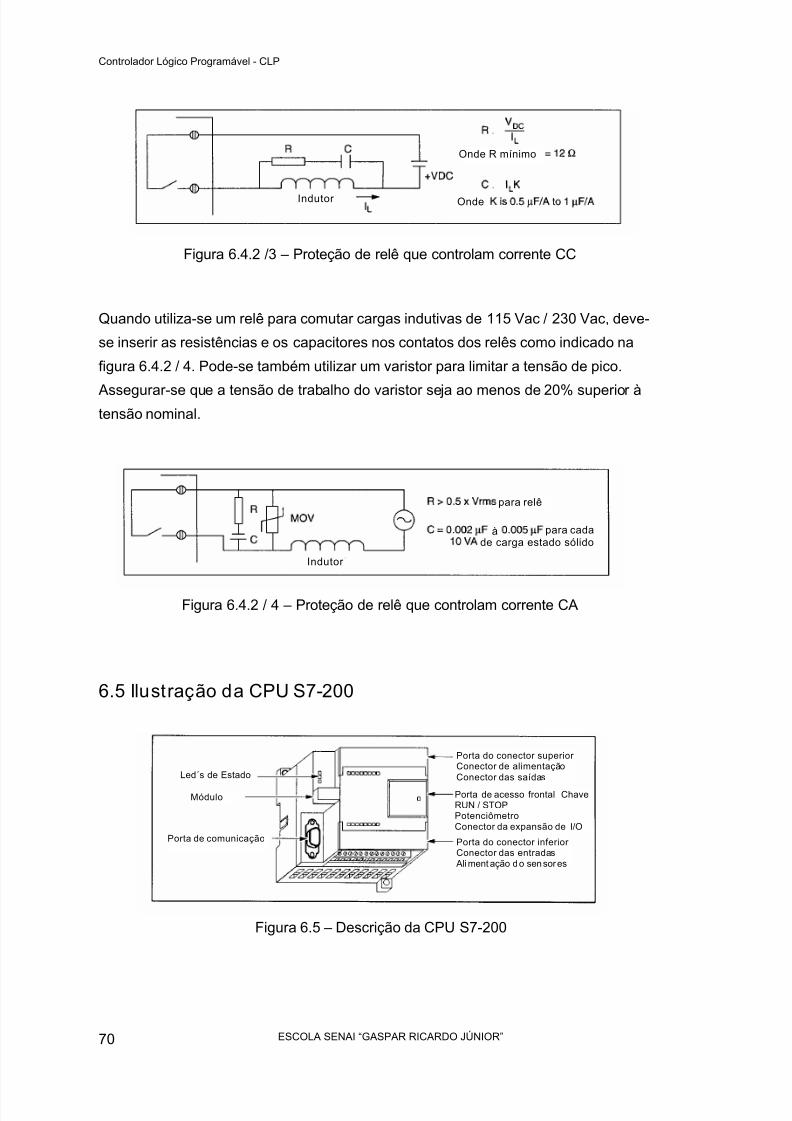
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 70/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 70
Porta do conector superiorConector de alimentaçãoConector das saídas
Porta de acesso frontal ChaveRUN / STOP PotenciômetroConector da expansão de I/O
Porta do conector inferiorConector das entradas
Aliment ação do sensores
Porta de comunicação
Led´s de Estado
Módulo
Figura 6.4.2 /3 – Proteção de relê que controlam corrente CC
Quando utiliza-se um relê para comutar cargas indutivas de 115 Vac / 230 Vac, deve-
se inserir as resistências e os capacitores nos contatos dos relês como indicado na
figura 6.4.2 / 4. Pode-se também utilizar um varistor para limitar a tensão de pico.
Assegurar-se que a tensão de trabalho do varistor seja ao menos de 20% superior àtensão nominal.
Figura 6.4.2 / 4 – Proteção de relê que controlam corrente CA
6.5 Ilustração da CPU S7-200
Figura 6.5 – Descrição da CPU S7-200
para relê
para cadade carga estado sólido
Indutor
Onde R mínimo
OndeIndutor
à
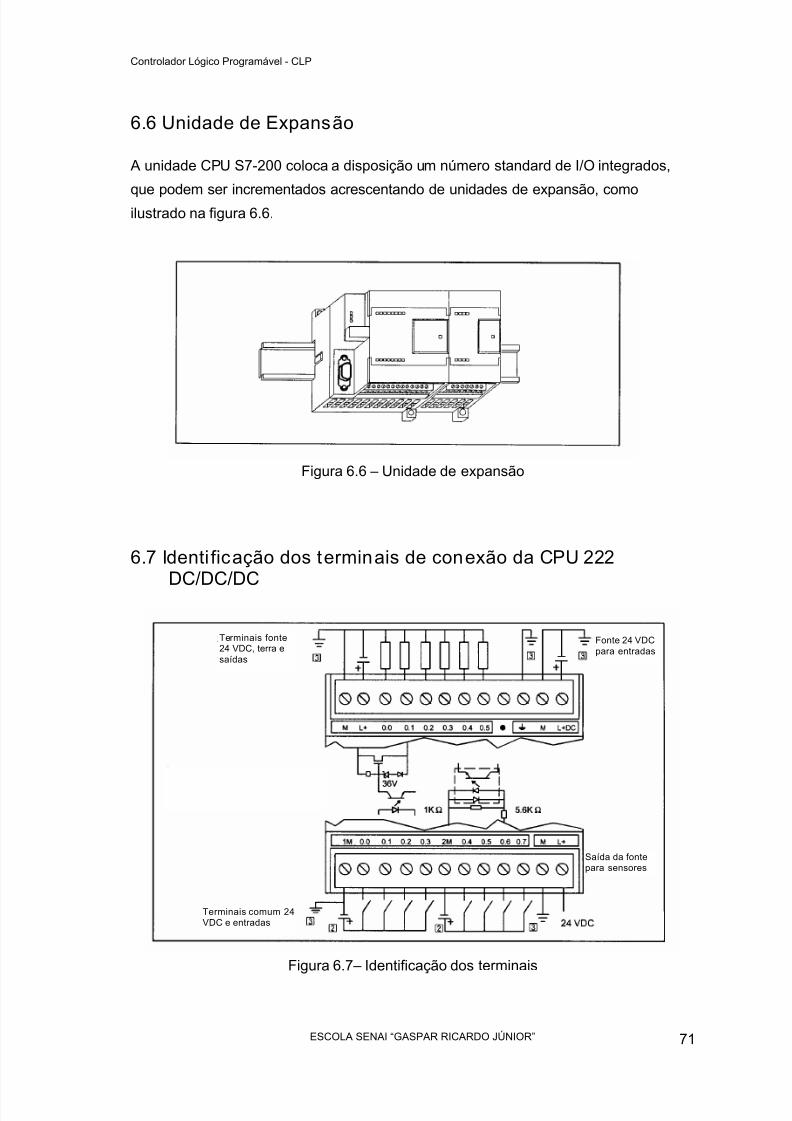
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 71/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 71
6.6 Unidade de Expansão
A unidade CPU S7-200 coloca a disposição um número standard de I/O integrados,
que podem ser incrementados acrescentando de unidades de expansão, comoilustrado na figura 6.6.
Figura 6.6 – Unidade de expansão
6.7 Identi ficação dos terminais de conexão da CPU 222DC/DC/DC
Figura 6.7– Identificação dos terminais
Saída da fontepara sensores
Terminais comum 24VDC e entradas
Terminais fonte24 VDC, terra esaídas
Fonte 24 VDCpara entradas
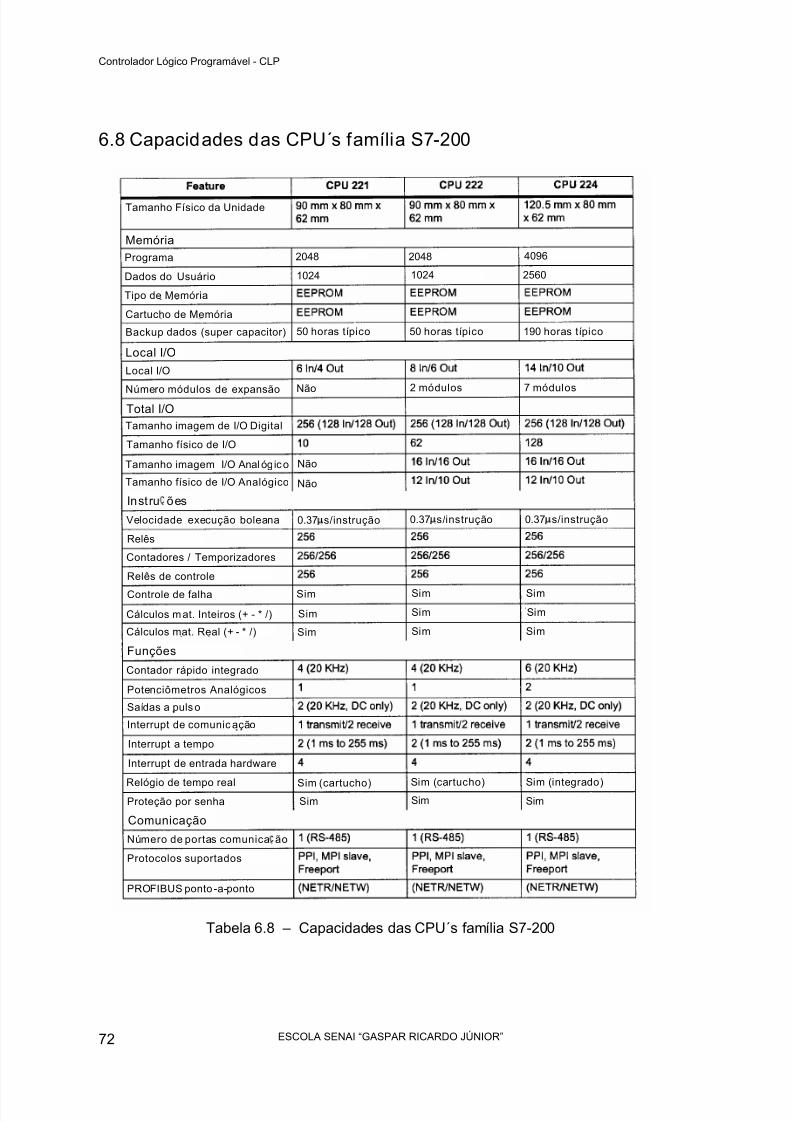
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 72/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 72
6.8 Capacidades das CPU´s família S7-200
Tabela 6.8 – Capacidades das CPU´s família S7-200
Tamanho Físico da Unidade
Memória
Programa
Dados do Usuário
Tipo de Memória
Cartucho de Memória
Backup dados (super capacitor)
Local I/O
Número módulos de expansão
Tamanho imagem de I/O Digital
Tamanho físico de I/O
Local I/O
Total I/O
Tamanho imagem I/O Anal ógico
Tamanho físico de I/O Analógico
Instru ões
Velocidade execução boleana
Relês
Contadores / Temporizadores
Relês de controle Controle de falha
Cálculos mat. Inteiros (+ - * /)
Cálculos mat. Real (+ - * /)
Funções
Contador rápido integrado
Potenciômetros Analógicos
Saídas a pulso
Interrupt de comunic ação
Interrupt a tempo
Interrupt de entrada hardware
Relógio de tempo realProteção por senha
Comunicação
Número de portas comunica ão
Protocolos suportados
PROFIBUS ponto -a-ponto
Sim Sim
Sim Sim Sim
SimSim (cartucho) Sim (cartucho) Sim (integrado)
0.37
s/instrução 0.37
s/instrução 0.37
s/instrução
Não
Não
Não 2 módulos 7 módulos
50 horas típico 50 horas típico 190 horas típico
2048 2048 4096
1024 1024 2560
Sim Sim Sim
Sim Sim Sim
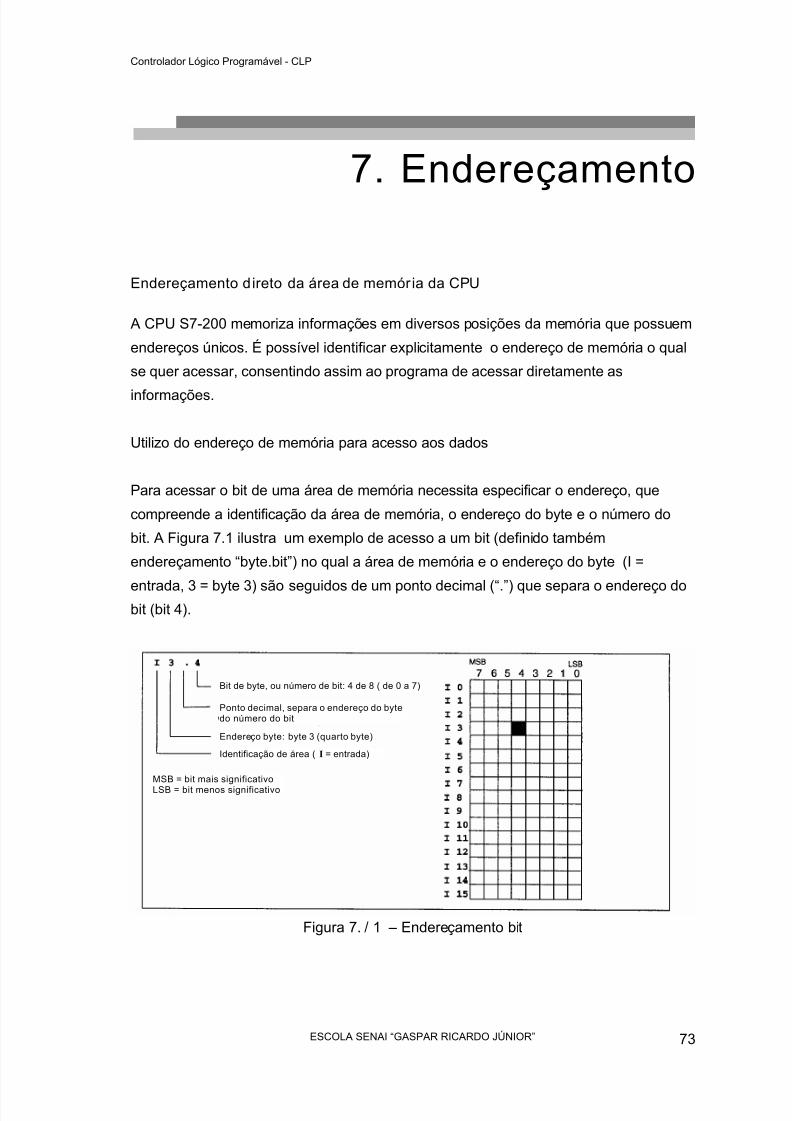
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 73/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 73
7. Endereçamento
Endereçamento direto da área de memória da CPU
A CPU S7-200 memoriza informações em diversos posições da memória que possuem
endereços únicos. É possível identificar explicitamente o endereço de memória o qual
se quer acessar, consentindo assim ao programa de acessar diretamente as
informações.
Utilizo do endereço de memória para acesso aos dados
Para acessar o bit de uma área de memória necessita especificar o endereço, que
compreende a identificação da área de memória, o endereço do byte e o número do
bit. A Figura 7.1 ilustra um exemplo de acesso a um bit (definido também
endereçamento “byte.bit”) no qual a área de memória e o endereço do byte (I =
entrada, 3 = byte 3) são seguidos de um ponto decimal (“.”) que separa o endereço dobit (bit 4).
Figura 7. / 1 – Endereçamento bit
Bit de byte, ou número de bit: 4 de 8 ( de 0 a 7)
Ponto decimal, separa o endereço do bytedo número do bit
Endereço byte: byte 3 (quarto byte)
Identificação de área ( I = entrada)
MSB = bit mais significativoLSB = bit menos significativo
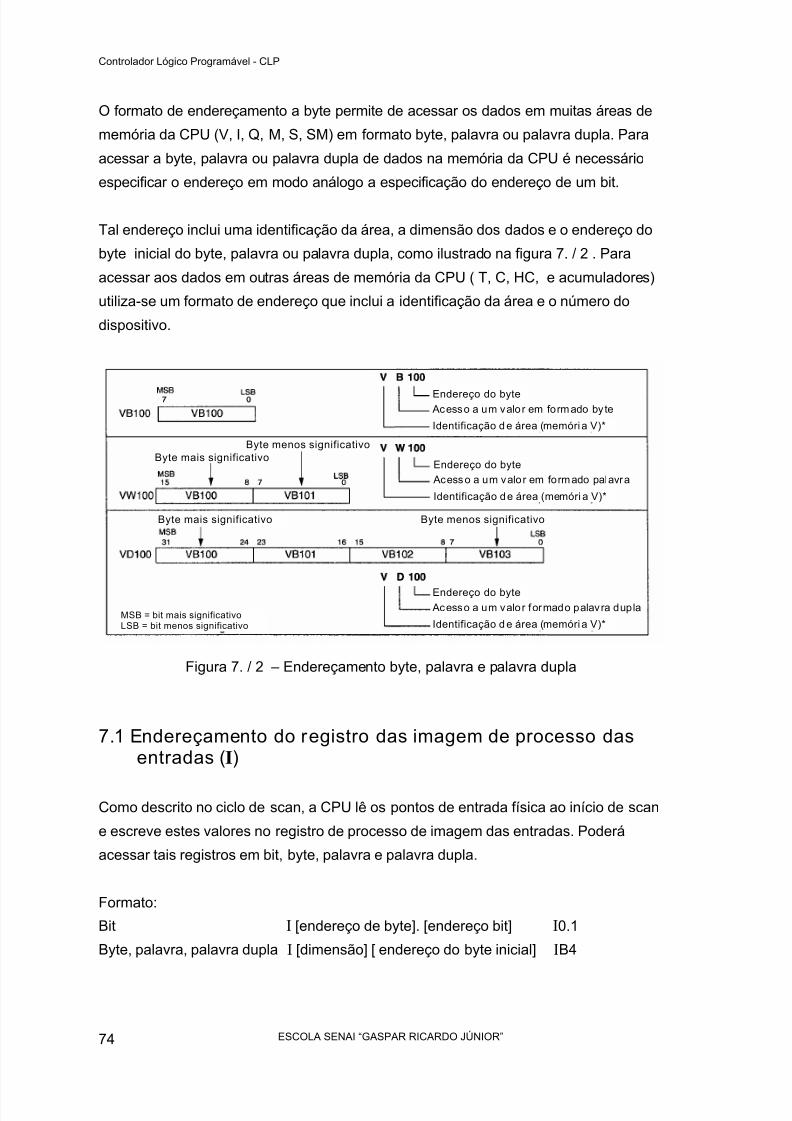
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 74/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 74
O formato de endereçamento a byte permite de acessar os dados em muitas áreas de
memória da CPU (V, I, Q, M, S, SM) em formato byte, palavra ou palavra dupla. Para
acessar a byte, palavra ou palavra dupla de dados na memória da CPU é necessário
especificar o endereço em modo análogo a especificação do endereço de um bit.
Tal endereço inclui uma identificação da área, a dimensão dos dados e o endereço do
byte inicial do byte, palavra ou palavra dupla, como ilustrado na figura 7. / 2 . Para
acessar aos dados em outras áreas de memória da CPU ( T, C, HC, e acumuladores)
utiliza-se um formato de endereço que inclui a identificação da área e o número do
dispositivo.
Figura 7. / 2 – Endereçamento byte, palavra e palavra dupla
7.1 Endereçamento do registro das imagem de processo dasentradas (I)
Como descrito no ciclo de scan, a CPU lê os pontos de entrada física ao início de scan
e escreve estes valores no registro de processo de imagem das entradas. Poderá
acessar tais registros em bit, byte, palavra e palavra dupla.
Formato:
Bit I [endereço de byte]. [endereço bit] I0.1
Byte, palavra, palavra dupla I [dimensão] [ endereço do byte inicial] IB4
Endereço do byte Acesso a um valo r em formado byte
Identificação d e área (memória V)*
Endereço do byte
Acesso a um valo r em formado palavra
Identificação de área (memóri a V)*
Endereço do byte Acesso a um valo r formado palavra dupla
Identificação d e área (memória V)*MSB = bit mais significativoLSB = bit menos significativo
Byte menos significativoByte mais significativo
Byte menos significativoByte mais significativo
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 75/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 75
7.2 Endereçamento do registro da imagem de processo dassaídas (Q)
Ao fim do ciclo de scan a CPU copia nas saídas físicas os valores memorizados na
imagem de processo das saídas. Pode-se acessar tal registro em bit, bit, palavra epalavra dupla.
Formato:
Bit Q [endereço de byte]. [endereço bit] Q1.1
Byte, palavra, palavra dupla Q [dimensão] [ endereço do byte inicial] QB5
7.3 Endereçamento da área de memória variável (V)
A memória V pode ser utilizada para memorizar os resultados intermediários de
instruções que venham a ser executadas da lógica de controle do programa usuário.
Pode-se além disto usar a memória V para memorizar outros dados pertinentes ao
processo ou alguma função de interesse do usuário. Pode-se acessar a área de
memória V em bit, byte, palavra e palavra dupla.
Formato:
Bit V [endereço de byte]. [endereço bit] V10.2Byte, palavra, palavra dupla V [dimensão] [ endereço do byte inicial] VW100
7.4 Endereçamento da área bit de memór ia (M)
A área de bit de memória pode ser utilizado como relê de controle para memorização
do estado intermediário de uma instrução ou outras informações de controle. As
memórias internas podem ser acessadas não somente em bit mas também em byte,
palavra e palavra dupla.
Formato:
Bit M [endereço de byte]. [endereço bit] M26.7
Byte, palavra, palavra dupla M [dimensão] [ endereço do byte inicial] MD20
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 76/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 76
7.5 Endereçamento da área de memór ia do relê de controleseqüencial (S)
Os bits de relê de controle seqüencial (S) são utilizados para organizar o
funcionamento de um processo em seqüência ou em segmentos de programaequivalentes. Os SCR permitem a segmentação lógica do programa de controle . O
SCR pode-se em bit, byte, palavra e palavra dupla.
Formato:
Bit S [endereço de byte]. [endereço bit] S3.1
Byte, palavra, palavra dupla S [dimensão] [ endereço do byte inicial] SB40
7.6 Endereçamento do special memory (SM)
Os bits SM fornecem uma possibilidade de comunicar informações entre a CPU e o
programa usuário. Poderá utilizar tais bits para selecionar e controlar algumas funções
especiais da CPU S7-200, como por exemplo:
• Um bit que ativa-se somente para o primeiro ciclo de scan;
• Bits que se ativam e desativam a freqüências estáveis;
• Bits que visualizam o estado das funções matemáticas ou de outras operações.
Para outras informações consultar o tabela de SM no software de programação STEP
7 Micro/WIN 32 , não obstante os SM são em base de bit , porém é possível acessa-
los em formato bit, byte, palavra e palavra dupla.
Formato:
Bit SM [endereço de byte]. [endereço bit] SM0.1
Byte, palavra, palavra dupla SM [dimensão] [ endereço do byte inicial] SMB86
7.7 Endereçamento da área de área de memór ia Local (L)
As CPU´s S7-200 provêem 64 bytes de memória local (L) das quais podem ser
usados 60 como memória de scratchpad (rascunho) ou para a passagem dos
parâmetros formais para a subrotinas. Quando se esta programando em LAD ou FBD,
STEP 7-MICRO/WIN 32 reserva os últimos quatros byte da memória local. Quando se
esta programando em STL toda a área de memória local são acessíveis, mas sejacomo for é preferível não utilizar os últimos quatro bytes.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 77/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 77
A memória local é semelhante a memória V com uma exceção fundamental. A
memória V é global, sendo que a memória L é local. O termo global significa que é
possível acessar um endereço de memória de qualquer parte do programa ( programa
principal, subrotinas ou rotinas de interrupção). O termo local significa que a alocação
da memória é associada a uma parte particular do programa. As CPU´s S7-200 alocam
64 byte da memória L para o programa principal, 64 byte para cada nível de subrotina
e 64 byte para as rotinas de interrupção.
A alocação da memória L para o programa principal não é acessível de subrotinas ou
das rotinas de interrupção. Uma subrotina não pode acessar a alocação da memória L
do programa principal, de uma rotina de interrupção ou de outras subrotinas. Do
mesmo modo, uma rotina de interrupção não pode acessar a alocação da memória L
do programa principal ou de uma subrotina.
A alocação da memória L é efetuada as CPU S7-200 em base as exigências
específicas. Isto significa que durante a execução do programa principal as alocações
da memória L para as subrotinas e as rotinas de interrupção não existem. Quando
verifica-se uma interrupção ou vem chamado uma subrotina, a memória local vem
alocada como necessária. A nova alocação da memória L pode reutilizar os mesmos
endereços de memória L de uma diversa subrotina ou rotina de interrupção.
A memória L não vem inicializada da CPU durante a alocação e pode conter qualquer
trabalho. Quando passa-se os parâmetros formais na chamada de uma subrotina, os
valores dos parâmetros passados são colocados na CPU nos endereços apropriados
da locação de memória L prevista para tal subrotina. Os endereços de memória L a
qual não são assinalados um valor na seqüência da passagem dos parâmetros
formais, não são inicializados e durante a alocação podem conter qualquer valor.
Pode-se acessar a memória L em formato de bit, byte, palavra e palavra dupla. Pode-
se utilizar como ponteiro para o endereçamento indireto, mas não pode-se endereçar
em modo indireto.
Formato:
Bit L [endereço de byte]. [endereço bit] L0.0
Byte, palavra, palavra dupla L [dimensão] [ endereço do byte inicial] LB33

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 78/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 78
7.8 Endereçamento da área de memória tempor izadores (T)
Na CPU S7-200 os temporizadores são elementos que contam os incrementos de
tempo. Os temporizadores S7-200 possuem resoluções (incremento na base de
tempo) de 1ms, 10 ms e 100 ms. As seguintes duas variáveis são associadas aotemporizador
• Valor corrente: número inteiro com sinal a 16 bit que memoriza o montante de
tempo contado do temporizador;
• Bit de temporização: este bit é setado ou resetado de acordo com o confronto entre
o valor corrente e o valor impostado. O valor pré-impostado é colocado como parte
integrante da instrução de temporização.
Pode-se acessar ambas variáveis utilizando o endereço do temporizador (T + número
do temporizador). O acesso pré-impostado ou valor corrente depende da instrução
utilizada: aqueles com os operandos em bit acessam ao bit de temporização; aqueles
com os operandos em palavra acessam ao valor corrente. Como especificado na figura
7.8, a instrução contato normalmente aberto acessa ao bit de temporização, no entanto
a instrução de Move Word (MOV_W) acessa ao valor corrente do temporizador.
Formato:T [número do temporizador] T3
Figura 7.8 – Endereçamento temporizador
Número temporizador(endereço do valor corrente)
Identificação da área (temporizador)*
Número temporizador(endereço do valor corrente)
Identificação da área (temporizador)*
Valor corrente do tem orizador
leitura / escrita
Valor corrente Bit tempori zação (leitura / escrit a)
Bit temporização
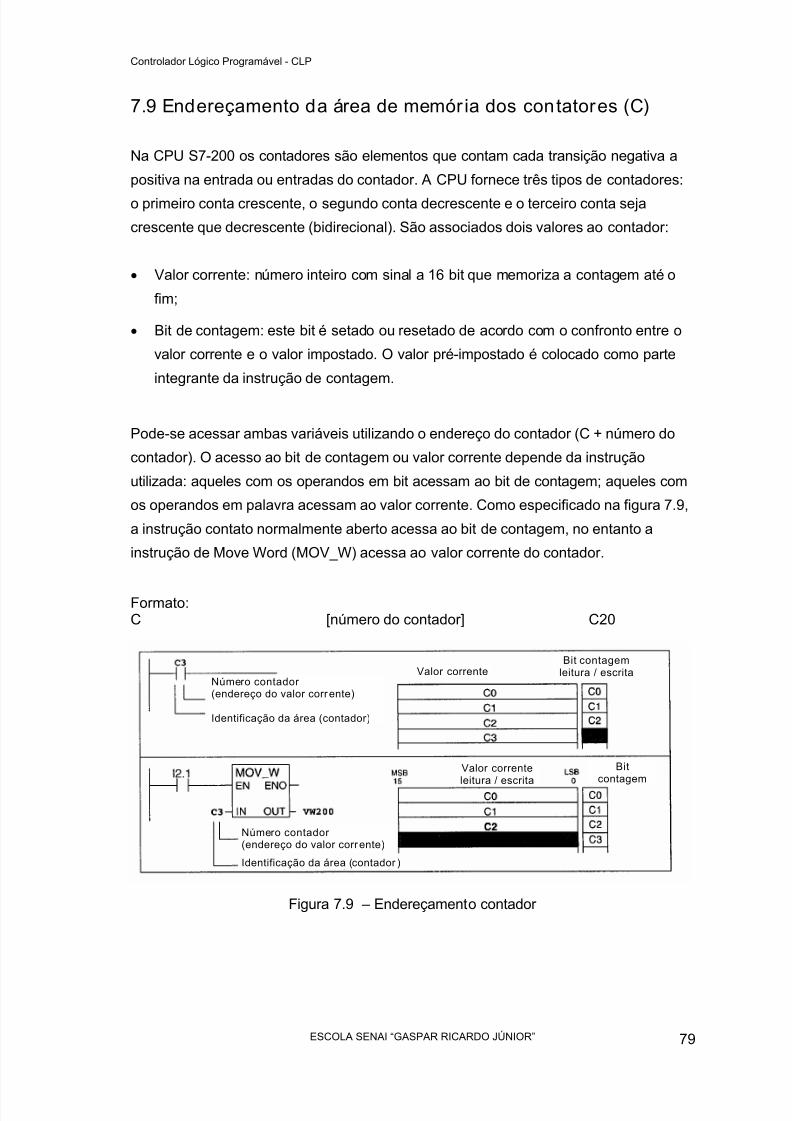
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 79/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 79
7.9 Endereçamento da área de memór ia dos contatores (C)
Na CPU S7-200 os contadores são elementos que contam cada transição negativa a
positiva na entrada ou entradas do contador. A CPU fornece três tipos de contadores:
o primeiro conta crescente, o segundo conta decrescente e o terceiro conta seja
crescente que decrescente (bidirecional). São associados dois valores ao contador:
• Valor corrente: número inteiro com sinal a 16 bit que memoriza a contagem até o
fim;
• Bit de contagem: este bit é setado ou resetado de acordo com o confronto entre o
valor corrente e o valor impostado. O valor pré-impostado é colocado como parte
integrante da instrução de contagem.
Pode-se acessar ambas variáveis utilizando o endereço do contador (C + número do
contador). O acesso ao bit de contagem ou valor corrente depende da instrução
utilizada: aqueles com os operandos em bit acessam ao bit de contagem; aqueles com
os operandos em palavra acessam ao valor corrente. Como especificado na figura 7.9,
a instrução contato normalmente aberto acessa ao bit de contagem, no entanto a
instrução de Move Word (MOV_W) acessa ao valor corrente do contador.
Formato:C [número do contador] C20
Figura 7.9 – Endereçamento contador
Número contador(endereço do valor corrente)
Identificação da área (contador)
Número contador(endereço do valor corrente)
Identificação da área (contador )
Valor corrente
Valor corrente
leitura / escrita
Bit contagemleitura / escrita
Bitcontagem

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 80/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 80
7.10 Endereçamento das entradas analógicas (AI)
A CPU S7-200 converte um valor analógico do mundo externo ( por exemplo um valor
de temperatura) em uma valor digital em formato de palavra (a 16 bits). Tais valores
podem-se acessar mediante a identificação da área (AI), a dimensão do dado (W) e oendereço do byte inicial. As entradas analógicas são palavras e iniciam sempre a byte
par (por ex. AIW0, AIW2, AIW4), como evidenciado na Figura 7.10. Os valores da
entrada analógica são somente de leitura.
Formato:
AIW [endereço do byte inicial] AIW4
Figura 7.10 – Endereçamento entrada analógica
7.11 Endereçamento das saídas analógicas (AQ)
A CPU S7-200 converte um valor digital em formato de palavra (a 16 bits) em um de
corrente ou tensão proporcional ao valor digital. Tais valores podem ser escritos
indicando a identificação da área (AQ), a dimensão do dado (W) e o endereço do byte
inicial. As saídas analógicas são palavras e iniciam sempre a byte par (por ex. AQW0,
AQW2, AQW4), como evidenciado na Figura 7.11. Os valores da saída analógica são
somente de escrita.
Formato: AQW [endereço do byte inicial] AQW4
Figura 7.11 – Endereçamento saída analógica
Endereço do byte
Acesso a um valo r formado palavraIdentificação de área (saída analógic a)
Bit menos significativoBit mais significativo
Bit menos significativoBit mais significativo
Endereço do byte Acesso a um valor formado pal avra
Identificação de área (entrada analógica)
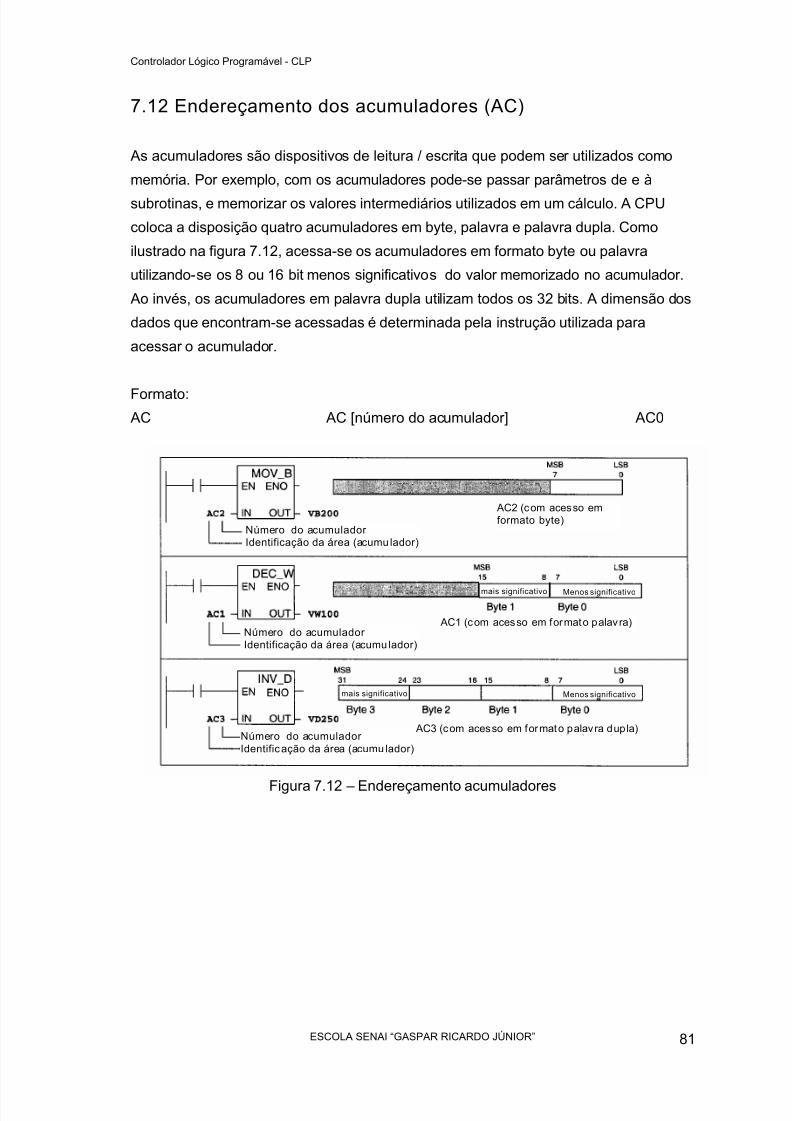
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 81/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 81
7.12 Endereçamento dos acumuladores (AC)
As acumuladores são dispositivos de leitura / escrita que podem ser utilizados como
memória. Por exemplo, com os acumuladores pode-se passar parâmetros de e à
subrotinas, e memorizar os valores intermediários utilizados em um cálculo. A CPU
coloca a disposição quatro acumuladores em byte, palavra e palavra dupla. Como
ilustrado na figura 7.12, acessa-se os acumuladores em formato byte ou palavra
utilizando-se os 8 ou 16 bit menos significativos do valor memorizado no acumulador.
Ao invés, os acumuladores em palavra dupla utilizam todos os 32 bits. A dimensão dos
dados que encontram-se acessadas é determinada pela instrução utilizada para
acessar o acumulador.
Formato: AC AC [número do acumulador] AC0
Figura 7.12 – Endereçamento acumuladores
mais significativo Menos significativo
mais significativo Menos significativo
AC2 (com acesso emformato byte)
Número do acumuladorIdentificação da área (acumu lador)
Número do acumuladorIdentificação da área (acumu lador)
Número do acumuladorIdentificação da área (acumu lador)
AC1 (com acesso em formato palavra)
AC3 (com acesso em formato palavra dupla)
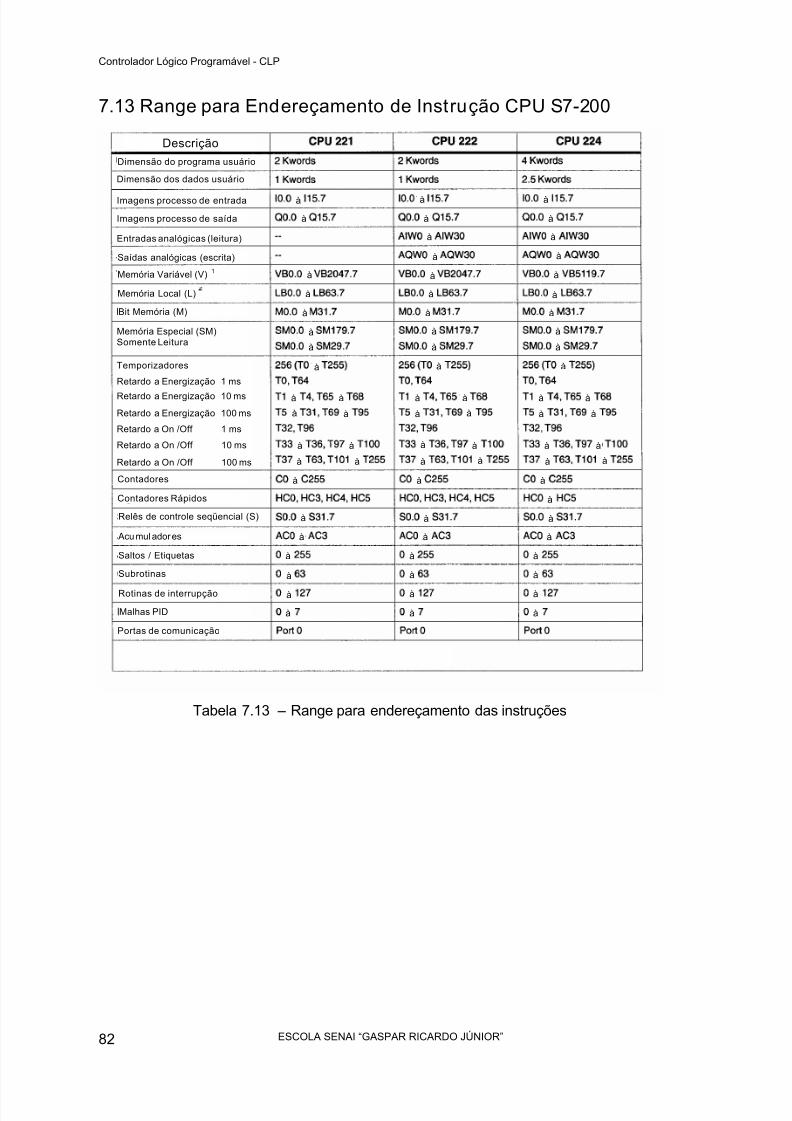
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 82/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 82
7.13 Range para Endereçamento de Instrução CPU S7-200
Tabela 7.13 – Range para endereçamento das instruções
Dimensão do programa usuário
Dimensão dos dados usuário
Imagens processo de entrada
Imagens processo de saída
Entradas analógicas (leitura)
Saídas analógicas (escrita)
Memória Variável (V) 1
Memória Local (L)
Bit Memória (M)
Memória Especial (SM)Somente Leitura
Temporizadores
Retardo a Energização 1 ms
Retardo a Energização 10 ms
Retardo a Energização 100 ms
Retardo a On /Off 1 ms
Retardo a On /Off 10 ms
Retardo a On /Off 100 ms
Contadores
Contadores Rápidos
Relês de controle seqüencial (S)
Acumul adores
Saltos / Etiquetas
Subrotinas
Rotinas de interrupção
Malhas PID
Portas de comunicação
à à à
à à à
à à
à à
à à à
à à à
à à à
à à à
à à à
à à à
à à à à à à
à à à à à à
à à
à à
à à
à à
à à
à à
à à à
à à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
Descrição

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 83/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 83
7.14 Range de Operandos para CPU S7-200
Tabela 7.13 – Range para operandos
Método de Acesso
Acesso a B it (byte.bit )
Acesso a B yte
Acesso a Palavra
Acesso a Palavra Dupla
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
à
Constante Constante Constante
Constante Constante Constante
Constante Constante Constante
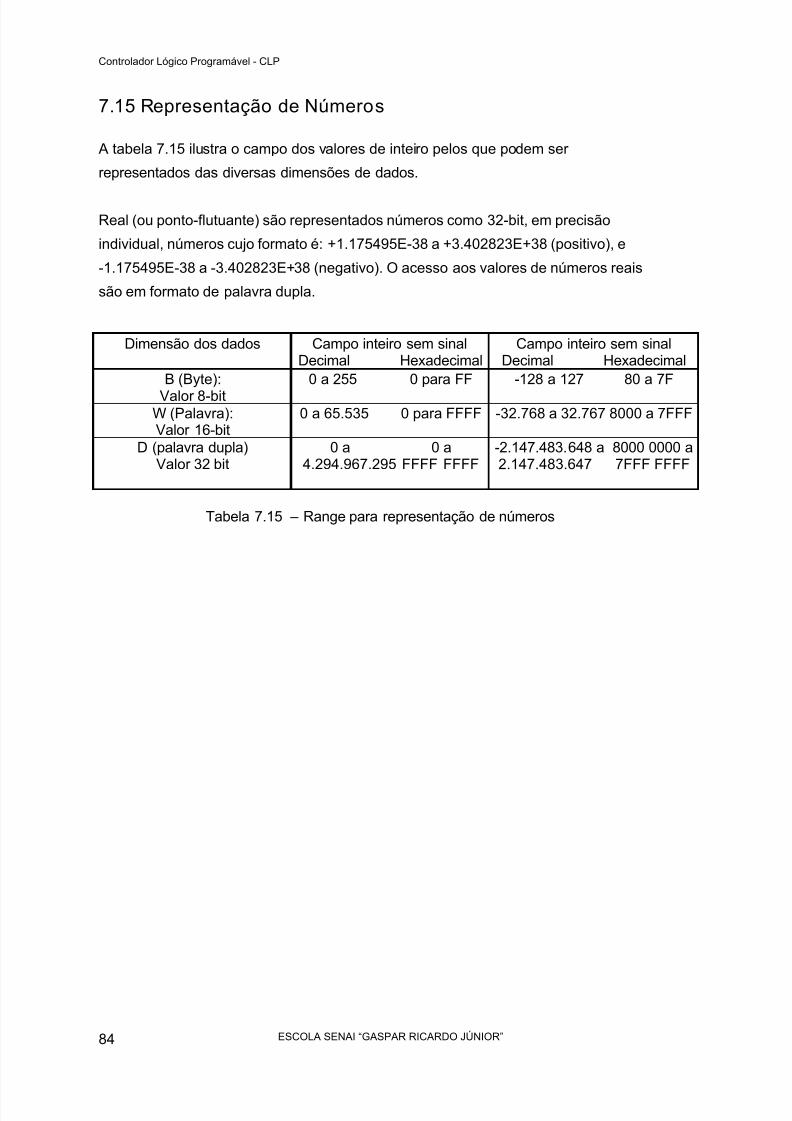
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 84/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 84
7.15 Representação de Números
A tabela 7.15 ilustra o campo dos valores de inteiro pelos que podem ser
representados das diversas dimensões de dados.
Real (ou ponto-flutuante) são representados números como 32-bit, em precisão
individual, números cujo formato é: +1.175495E-38 a +3.402823E+38 (positivo), e
-1.175495E-38 a -3.402823E+38 (negativo). O acesso aos valores de números reais
são em formato de palavra dupla.
Dimensão dos dados Campo inteiro sem sinalDecimal Hexadecimal
Campo inteiro sem sinalDecimal Hexadecimal
B (Byte):
Valor 8-bit
0 a 255 0 para FF -128 a 127 80 a 7F
W (Palavra):Valor 16-bit
0 a 65.535 0 para FFFF
-32.768 a 32.767 8000 a 7FFF
D (palavra dupla)Valor 32 bit
0 a 0 a4.294.967.295 FFFF FFFF
-2.147.483.648 a 8000 0000 a2.147.483.647 7FFF FFFF
Tabela 7.15 – Range para representação de números
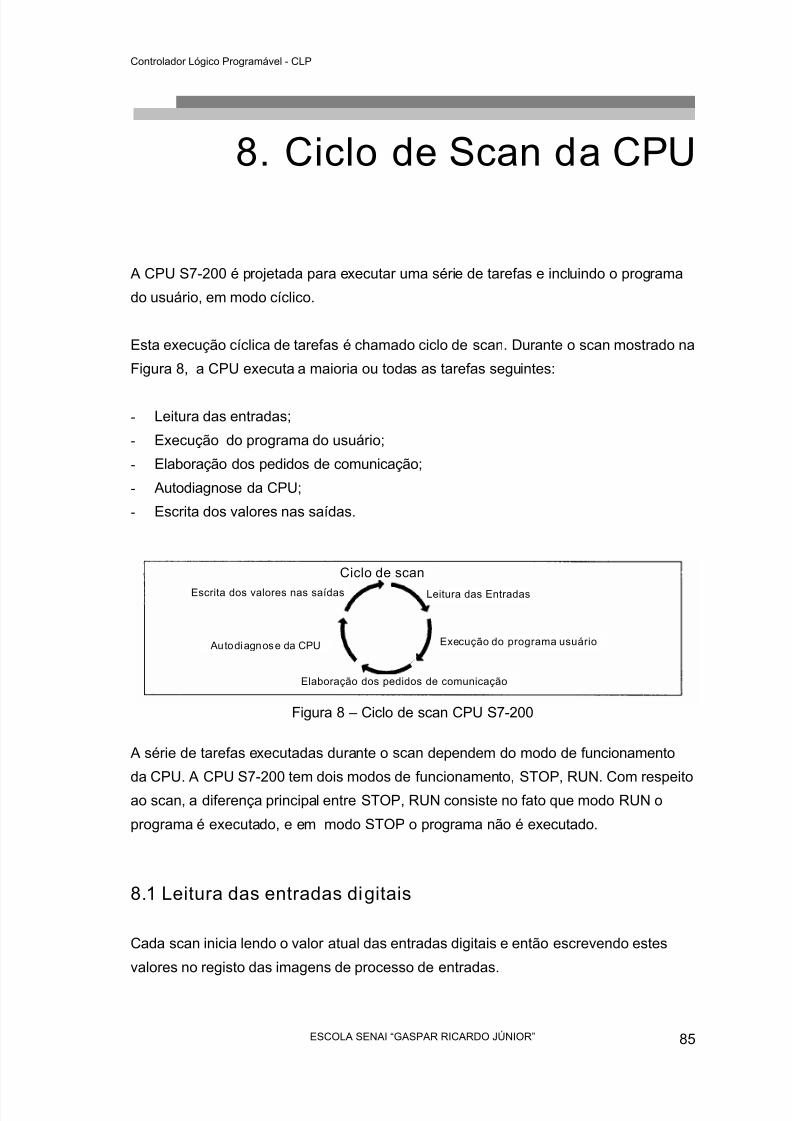
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 85/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 85
8. Ciclo de Scan da CPU
A CPU S7-200 é projetada para executar uma série de tarefas e incluindo o programa
do usuário, em modo cíclico.
Esta execução cíclica de tarefas é chamado ciclo de scan. Durante o scan mostrado na
Figura 8, a CPU executa a maioria ou todas as tarefas seguintes:
- Leitura das entradas;
- Execução do programa do usuário;
- Elaboração dos pedidos de comunicação;
- Autodiagnose da CPU;
- Escrita dos valores nas saídas.
Figura 8 – Ciclo de scan CPU S7-200
A série de tarefas executadas durante o scan dependem do modo de funcionamento
da CPU. A CPU S7-200 tem dois modos de funcionamento, STOP, RUN. Com respeito
ao scan, a diferença principal entre STOP, RUN consiste no fato que modo RUN o
programa é executado, e em modo STOP o programa não é executado.
8.1 Leitura das entradas digitais
Cada scan inicia lendo o valor atual das entradas digitais e então escrevendo estes
valores no registo das imagens de processo de entradas.
Ciclo de scan
Leitura das Entradas
Execução do programa usuário
Elaboração dos pedidos de comunicação
Autodiagnose da CPU
Escrita dos valores nas saídas
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 86/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 86
Na CPU são previstos incrementos de oito bit (um byte) para as imagem de processo
de entradas. Se a CPU ou módulo de expansão não provê uma entrada física para
cada bit do byte reservado, não será possível realocar este bit em uma unidade
sucessiva da cadeia de I/O ou utiliza-lo no programa usuário. A CPU reseta a zero tal
entrada inutilizada do registro de imagens de processo de entradas no início de cada
ciclo. Todavia, se a unidade CPU pode acolher diversas unidades de expansão de I/O,
que não são atualmente utilizadas ( enquanto o usuário não instalou os módulos de
expansão), pode-se dispor de memórias adicionais utilizando os bit´s de entrada da
expansão não utilizados.
A CPU não atualiza automaticamente as entradas analógicas durante o scan, a menos
que não tenha sido ativado a filtragem das entradas analógicas. A filtragem digital é
disponível como opção selecionável do usuário e pode ser ativada individualmentepara cada uma das entradas.
A filtragem digital é prevista para unidades analógicas econômicas, que não dispõe de
função interna de filtragem . A filtragem digital é utilizada nas aplicações a qual o sinal
de entrada varia lentamente no tempo, todavia deve ser desativado se o sinal é de
variação rápida.
Quando ativada a filtragem para entrada analógica , a CPU atualiza este último uma
vez por ciclo de scan, executa a função de filtragem e memoriza internamente o valorobtido. O valor é fornecido cada vez que o programa acessa a entrada analógica.
Se não é ativado a filtragem analógica de uma entrada analógica, a CPU lê o valor da
entrada da unidade física cada vez que o programa acessa a entrada analógica.
8.2 Execução do programa usuário
Durante a fase de execução do scan, a CPU executa o programa do usuário iniciando
da primeira instrução e percorrendo no sentido da instrução final. As operações direta
de I/O fornecem ao usuário um acesso imediato as entradas e saídas no curso da
execução do programa ou de uma rotina de interrupção.
Utilizando-se interrupção no programa usuário, as rotinas associadas aos eventos de
interrupção são memorizadas como parte do programa. As rotinas de interrupção não
são executadas como parte normal do ciclo de scan, mas quando intervém um evento
de interrupção ( isto pode ser verificado em qualquer ponto do ciclo de scan).
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 87/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 87
8.3 Elaboração dos pedido de comunicação
Durante esta fase, a CPU elabora as mensagens que recebeu das interfaces de
comunicação.
8.4 Autodiagnose da CPU
Durante esta fase do scan, a CPU executa um controle de seu firmware e da memória
de programa ( somente em modo RUN). É controlado também o estado das unidades
de I/O.
8.5 Escr ita dos valores nas saídas digitais
No fim de cada ciclo de scan a CPU escreve nas saídas digitais os valores
memorizados no registo das imagens de processo das saídas.
Na CPU são previstos incrementos de oito bits (um byte) para o registro das imagens
de processo das saídas. Se a CPU ou unidade de expansão não fornecem uma saída
física para cada bit do byte reservado, não será possível realocar este bit na unidade
sucessiva da cadeia de I/O.
Quando passa-se do modo RUN ao modo STOP, as saídas digitais são impostadas
com os valores definidos na tabela das saídas ou mantém o estado corrente (dependo
da parametrização efetuada). As saídas analógicas mantém o último valor escrito. As
saídas digitais são desativadas por default.
8.6 Interrupção do ciclo de scan
Utilizando-se as interrupções, as rotinas associadas de cada evento não são
executadas como parte do programa . As rotinas de interrupção não são executadas
como parte normal do ciclo de scan, mas realizadas quando há uma intervenção em
um evento de interrupção (isto pode ser verificado em qualquer ponto do ciclo de
scan). As interrupções são elaboradas da CPU uma depois a outra ao nível de
prioridade.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 88/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 88
8.7 Registros das imagens de processo das entradas e saídas
É preferível utilizar o registro da imagens de processo mais do que acessar
diretamente as entradas ou as saídas durante a execução do programa e isto por três
razões:
• A padronização de todas as entradas relacionadas ao ciclo de scan sincroniza e
congela os valores das entradas para a fase de execução do programa ao interno
do próprio ciclo de scan.
As saídas são atualizadas do registro de imagem de processo com a execução do
programa completada. Isto produz um efeito estabilizante no sistema.
• O programa usuário pode acessar ao registro das imagens de processo muito mais
rapidamente em relação aos pontos de I/O, consentindo uma maior rapidez
também na execução do programa.
• Os pontos I/O são entidades a bit, as quais são acessadas em bit, byte, palavra ou
palavra dupla. Graças a isto, os registros das imagens de processo oferecem uma
maior flexibilidade.
8.8 Controle direto dos I/O (entradas e saídas)
As operações diretas com entradas e saídas permitem um acesso imediato as
entradas e saídas efetivas, apesar de os registros das imagens de processo venham
normalmente operadas como fonte ou destinação para os acessos de I/O. Utiliza-se
uma operação direta para acessar uma entrada, o endereço correspondente do
registro das imagens de processo das entradas não vem modificado. O endereço
correspondente do registro da imagens de processo das saídas é, ao invés, atualizado.
A CPU trata as entradas e as saídas analógicas como dados imediatos, ao menos que
não seja ativado a filtragem digital das entradas analógicas. Quando escreve-se um
valor na saída analógica, esta última vem atualizada imediatamente.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 89/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 89
8.9 Seleção do modo de Funcionamento da CPU
A CPU S7-200 há dois modos de funcionamento:
• STOP: a CPU não executa o programa. Neste modo o usuário pode carregar o
programa ou configurar a CPU.
• RUN: a CPU executa o programa.
O LED frontal da CPU indica o modo de funcionamento corrente.
O modo de funcionamento pode ser selecionado como segue:
• Manualmente impostando a chave seletora de funcionamento do CLP;
• Utilizando o software de programação STEP 7-MICRO/WIN 32 e impostando a
chave seletora de modo da CPU em TERM ou RUN.
• Inserindo no programa uma operação STOP.
8.10 Modificação do modo de funcionamento com a chave
seletora A chave seletora do modo de funcionamento (colocada abaixo da porta de acesso da
CPU) consente de selecionar manualmente o modo de funcionamento da CPU:
• Impostando no estado STOP pára a execução do programa;
• Comutando a CPU no estado de RUN parte a execução do programa;
• Impostando a chave seletora no modo TERM (terminal) não se modifica o modo de
funcionamento da CPU, mas permite ao software de programação de modifica-lo.

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 90/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 90
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 91/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 91
9. Programando CLP S7-200
Linguagem STEP 7
9.1 Conceitos Básicos
As CPU´s S7-200 colocam a disposição muitas tipos de instruções que permitem de
resolver uma vasta gama de aplicações de automação industrial. Em particular, são
disponíveis dois grupos principais de operações: SIMATIC e IEC 1131-3. Além disto, osoftware de programação baseado em PC, STEP 7Micro/WIN 32, prevê diversos
editores que consentem criar programas de controle com tais instruções. Por exemplo,
um programador pode escolher em realizar o próprio programa em um ambiente
gráfico, assim como um outro programador no mesmo projeto poderia preferir um
editor que utiliza linguagem em lista de instruções.
Quando se realiza um programa, deve-se efetuar duas escolhas fundamentais:
• O tipo de set de instruções (SIMATIC ou IEC 1131-3)
• O tipo de editor (lista de instrução, esquema a contatos Ladder ou esquema lógico).
São possíveis as combinações de set de instruções S7-200 e do editor indicadas na
tabela abaixo.
Set de instrução SIMATIC Set de instrução IEC1131-3Editor de lista de instrução (STL) Não disponível
Editor de diagrama a contatos (LAD) Editor de diagrama a contatos (LAD)Editor de diagrama a blocos lógicos (FBD) Editor de diagrama a blocos lógicos (FBD)
Tabela 9.1 – Set de instrução SIMATIC e IEC 1131-1
9.2 Editor STL
O editor STL do STEP 7Micro/WIN 32 permite criar um programa de controle
especificando os mnemônicos das instruções. Em geral, o editor STL é usado por
programadores avançados que possuem uma experiência acentuada em
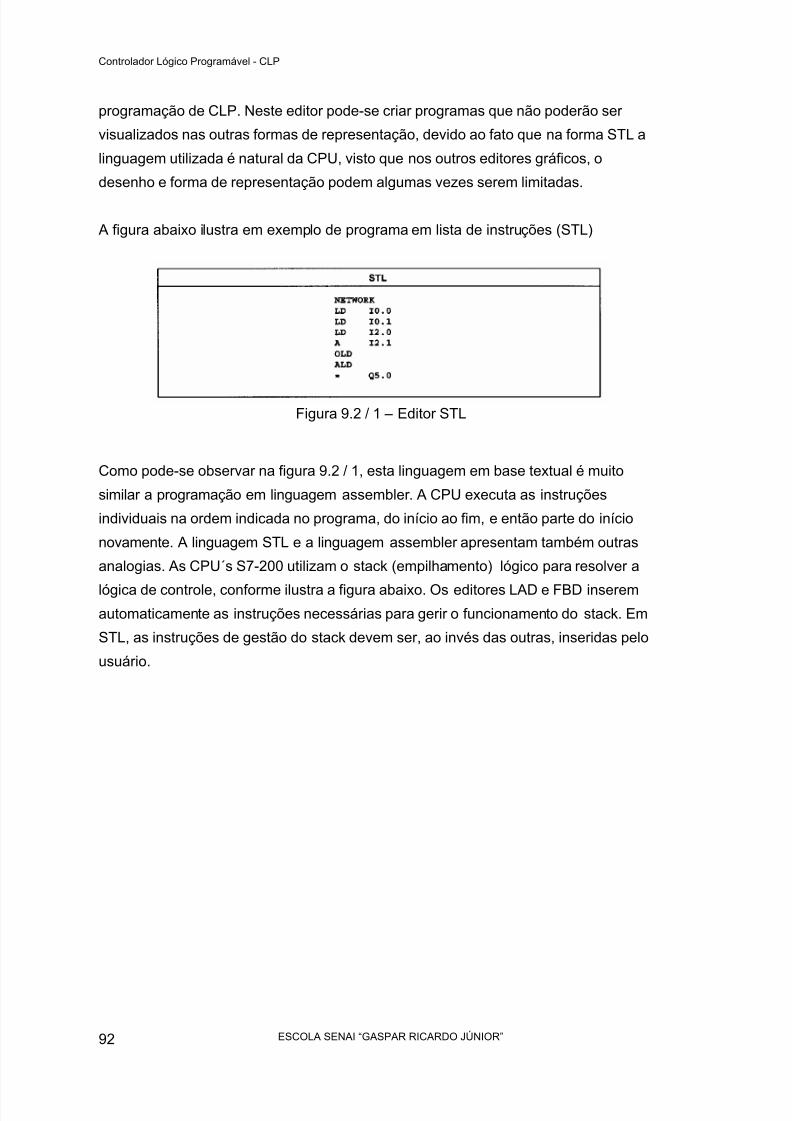
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 92/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 92
programação de CLP. Neste editor pode-se criar programas que não poderão ser
visualizados nas outras formas de representação, devido ao fato que na forma STL a
linguagem utilizada é natural da CPU, visto que nos outros editores gráficos, o
desenho e forma de representação podem algumas vezes serem limitadas.
A figura abaixo ilustra em exemplo de programa em lista de instruções (STL)
Figura 9.2 / 1 – Editor STL
Como pode-se observar na figura 9.2 / 1, esta linguagem em base textual é muito
similar a programação em linguagem assembler . A CPU executa as instruções
individuais na ordem indicada no programa, do início ao fim, e então parte do início
novamente. A linguagem STL e a linguagem assembler apresentam também outras
analogias. As CPU´s S7-200 utilizam o stack (empilhamento) lógico para resolver a
lógica de controle, conforme ilustra a figura abaixo. Os editores LAD e FBD inseremautomaticamente as instruções necessárias para gerir o funcionamento do stack. Em
STL, as instruções de gestão do stack devem ser, ao invés das outras, inseridas pelo
usuário.
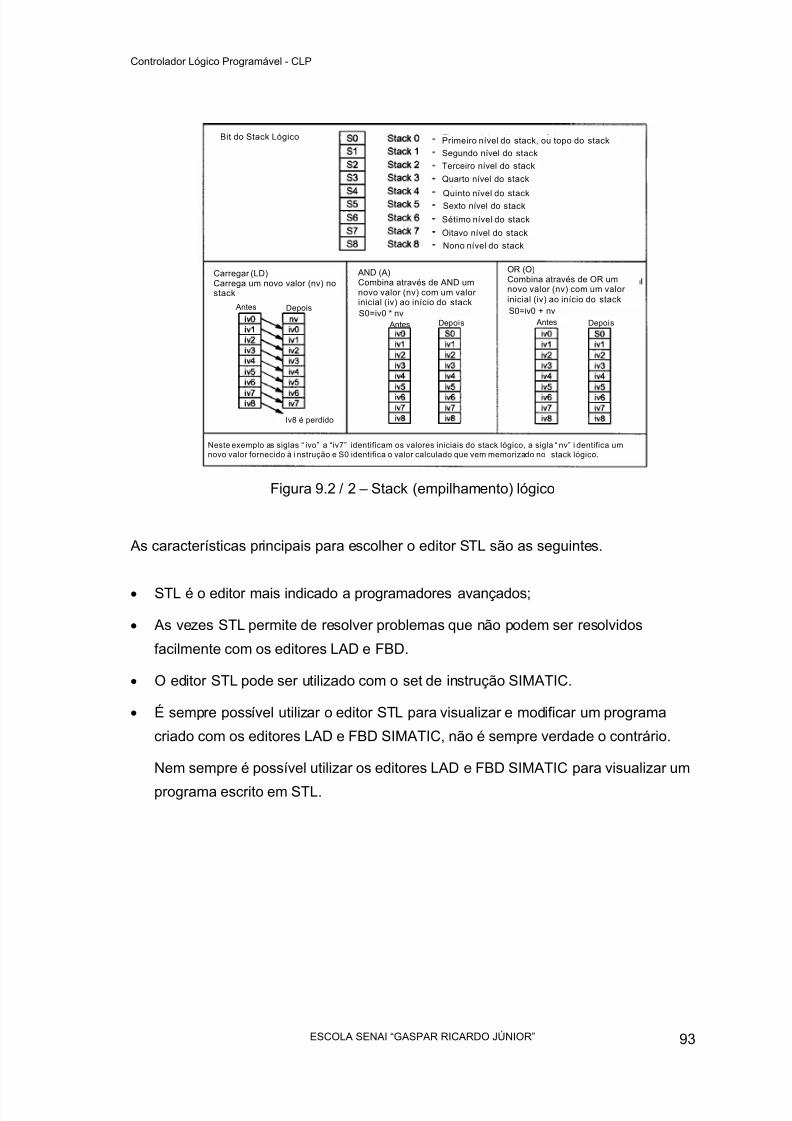
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 93/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 93
Figura 9.2 / 2 – Stack (empilhamento) lógico
As características principais para escolher o editor STL são as seguintes.
• STL é o editor mais indicado a programadores avançados;
• As vezes STL permite de resolver problemas que não podem ser resolvidos
facilmente com os editores LAD e FBD.
• O editor STL pode ser utilizado com o set de instrução SIMATIC.
• É sempre possível utilizar o editor STL para visualizar e modificar um programa
criado com os editores LAD e FBD SIMATIC, não é sempre verdade o contrário.
Nem sempre é possível utilizar os editores LAD e FBD SIMATIC para visualizar um
programa escrito em STL.
Bit do Stack Lógico Primeiro nível do stack, ou topo do stack
Segundo nível do stack
Terceiro nível do stack
Quarto nível do stack
Quinto nível do stackSexto nível do stack
Sétimo nível do stack
Oitavo nível do stack
Nono nível do stack
Carregar (LD)Carrega um novo valor (nv) nostack
AND (A)Combina através de AND umnovo valor (nv) com um valorinicial (iv) ao início do stack
OR (O)Combina através de OR umnovo valor (nv) com um valorinicial (iv) ao início do stack
Antes Depois
Antes AntesDepois Depois
S0=iv0 + nv S0=iv0 * nv
Iv8 é perdido
Neste exemplo as siglas “ ivo” a “iv7” identificam os valores iniciais do stack lógico, a sigla “ nv” i dentifica umnovo valor fornecido à i nstrução e S0 identifica o valor calculado que vem memorizado no stack lógico.
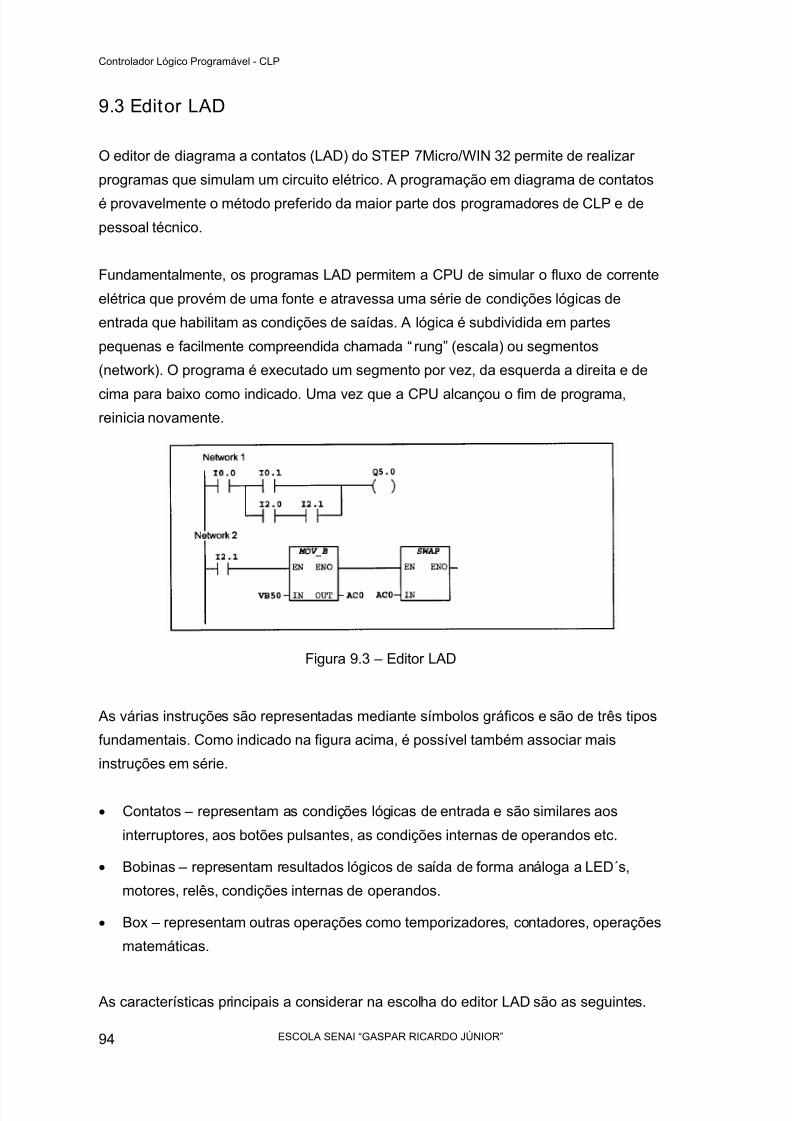
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 94/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 94
9.3 Editor LAD
O editor de diagrama a contatos (LAD) do STEP 7Micro/WIN 32 permite de realizar
programas que simulam um circuito elétrico. A programação em diagrama de contatos
é provavelmente o método preferido da maior parte dos programadores de CLP e de
pessoal técnico.
Fundamentalmente, os programas LAD permitem a CPU de simular o fluxo de corrente
elétrica que provém de uma fonte e atravessa uma série de condições lógicas de
entrada que habilitam as condições de saídas. A lógica é subdividida em partes
pequenas e facilmente compreendida chamada “rung” (escala) ou segmentos
(network). O programa é executado um segmento por vez, da esquerda a direita e de
cima para baixo como indicado. Uma vez que a CPU alcançou o fim de programa,reinicia novamente.
Figura 9.3 – Editor LAD
As várias instruções são representadas mediante símbolos gráficos e são de três tipos
fundamentais. Como indicado na figura acima, é possível também associar mais
instruções em série.
• Contatos – representam as condições lógicas de entrada e são similares aos
interruptores, aos botões pulsantes, as condições internas de operandos etc.
• Bobinas – representam resultados lógicos de saída de forma análoga a LED´s,
motores, relês, condições internas de operandos.
• Box – representam outras operações como temporizadores, contadores, operações
matemáticas.
As características principais a considerar na escolha do editor LAD são as seguintes.
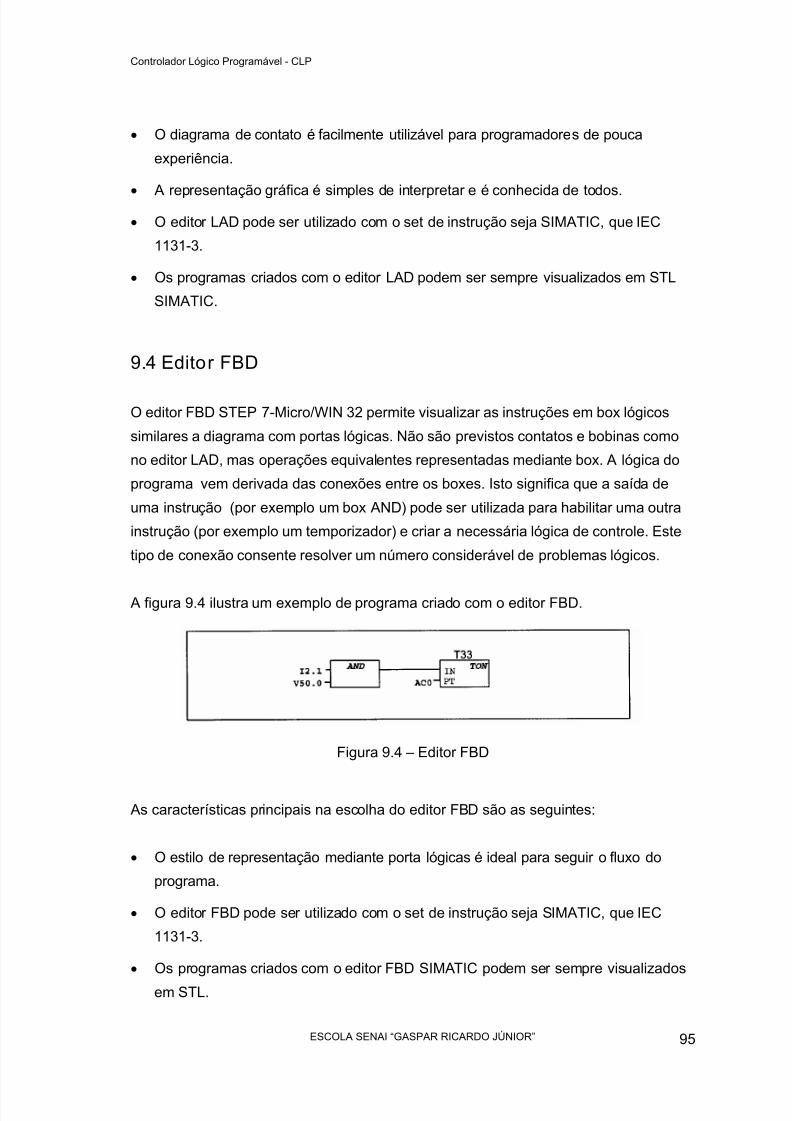
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 95/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 95
• O diagrama de contato é facilmente utilizável para programadores de pouca
experiência.
• A representação gráfica é simples de interpretar e é conhecida de todos.• O editor LAD pode ser utilizado com o set de instrução seja SIMATIC, que IEC
1131-3.
• Os programas criados com o editor LAD podem ser sempre visualizados em STL
SIMATIC.
9.4 Editor FBD
O editor FBD STEP 7-Micro/WIN 32 permite visualizar as instruções em box lógicos
similares a diagrama com portas lógicas. Não são previstos contatos e bobinas como
no editor LAD, mas operações equivalentes representadas mediante box. A lógica do
programa vem derivada das conexões entre os boxes. Isto significa que a saída de
uma instrução (por exemplo um box AND) pode ser utilizada para habilitar uma outra
instrução (por exemplo um temporizador) e criar a necessária lógica de controle. Este
tipo de conexão consente resolver um número considerável de problemas lógicos.
A figura 9.4 ilustra um exemplo de programa criado com o editor FBD.
Figura 9.4 – Editor FBD
As características principais na escolha do editor FBD são as seguintes:
• O estilo de representação mediante porta lógicas é ideal para seguir o fluxo do
programa.
• O editor FBD pode ser utilizado com o set de instrução seja SIMATIC, que IEC
1131-3.
• Os programas criados com o editor FBD SIMATIC podem ser sempre visualizados
em STL.
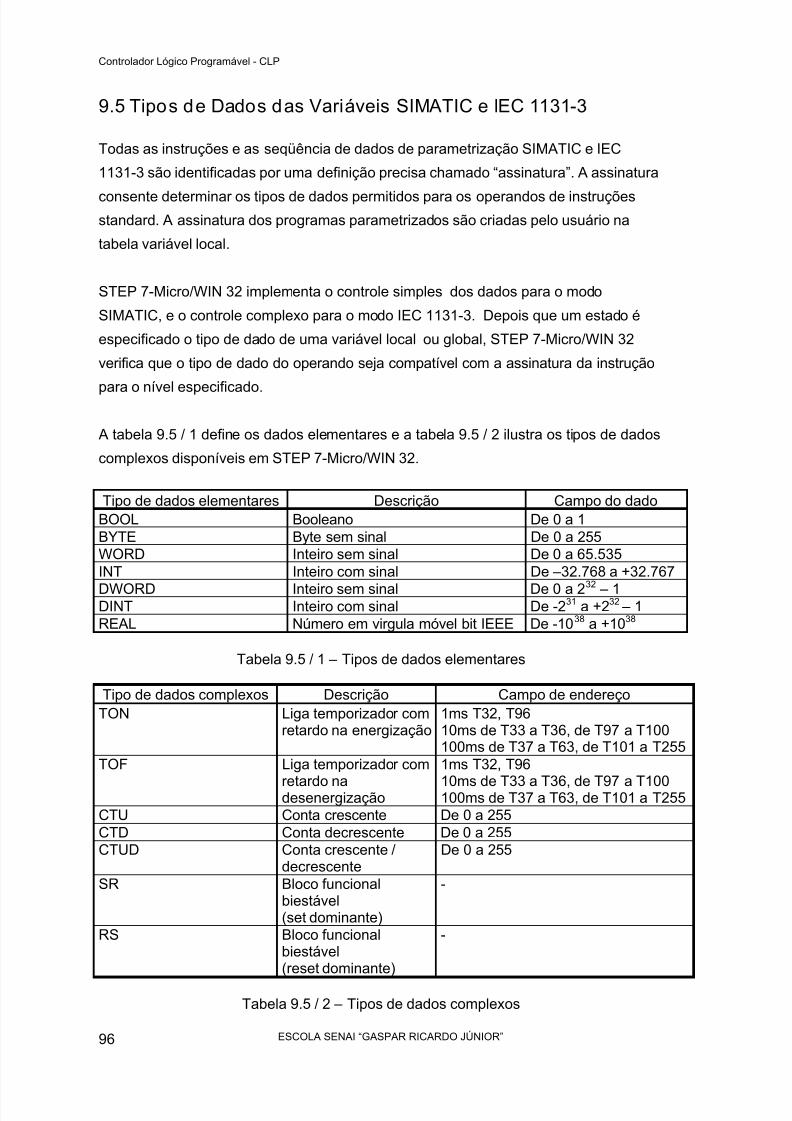
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 96/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 96
9.5 Tipos de Dados das Variáveis SIMATIC e IEC 1131-3
Todas as instruções e as seqüência de dados de parametrização SIMATIC e IEC
1131-3 são identificadas por uma definição precisa chamado “assinatura”. A assinatura
consente determinar os tipos de dados permitidos para os operandos de instruçõesstandard. A assinatura dos programas parametrizados são criadas pelo usuário na
tabela variável local.
STEP 7-Micro/WIN 32 implementa o controle simples dos dados para o modo
SIMATIC, e o controle complexo para o modo IEC 1131-3. Depois que um estado é
especificado o tipo de dado de uma variável local ou global, STEP 7-Micro/WIN 32
verifica que o tipo de dado do operando seja compatível com a assinatura da instrução
para o nível especificado.
A tabela 9.5 / 1 define os dados elementares e a tabela 9.5 / 2 ilustra os tipos de dados
complexos disponíveis em STEP 7-Micro/WIN 32.
Tipo de dados elementares Descrição Campo do dadoBOOL Booleano De 0 a 1BYTE Byte sem sinal De 0 a 255WORD Inteiro sem sinal De 0 a 65.535INT Inteiro com sinal De –32.768 a +32.767
DWORD Inteiro sem sinal De 0 a 232
– 1DINT Inteiro com sinal De -231 a +232 – 1REAL Número em virgula móvel bit IEEE De -1038 a +1038
Tabela 9.5 / 1 – Tipos de dados elementares
Tipo de dados complexos Descrição Campo de endereçoTON Liga temporizador com
retardo na energização1ms T32, T9610ms de T33 a T36, de T97 a T100100ms de T37 a T63, de T101 a T255
TOF Liga temporizador com
retardo nadesenergização
1ms T32, T96
10ms de T33 a T36, de T97 a T100100ms de T37 a T63, de T101 a T255CTU Conta crescente De 0 a 255CTD Conta decrescente De 0 a 255CTUD Conta crescente /
decrescenteDe 0 a 255
SR Bloco funcionalbiestável(set dominante)
-
RS Bloco funcionalbiestável(reset dominante)
-
Tabela 9.5 / 2 – Tipos de dados complexos
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 97/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 97
10. Elementos básicos para
Construir um Programa
O S7-200 CPU executa seu programa continuamente para controlar uma tarefa ou
processo. Cria-se este programa com STEP 7-Micro/WIN 32 e carrega-se para o CPU.
Do programa principal, é possível chamar diversas subrotinas ou rotinas de
interrupção.
10.1 Organizando o Programa
Os programas da CPU S7-200 são constituídos de três elementos básicos: o programa
principal, subrotina (opcional), e rotinas de interrupção (opcional) caracterizados da
seguinte estrutura:
10.1.1 Programa Principal
O corpo do programa principal é onde coloca-se as instruções que controlam a
aplicação. As instruções do programa principal são executadas seqüencialmente e de
modo consecutivo, uma vez por ciclo da CPU.
10.1.2 Subrotinas
Só são executados estes elementos opcionais no programa do usuário quando eles
são chamados do programa principal.
10.1.3 Rotinas de interrupção
Estes elementos opcionais no programa do usuário são executados ao verificar-se
específicos eventos de interrupção.
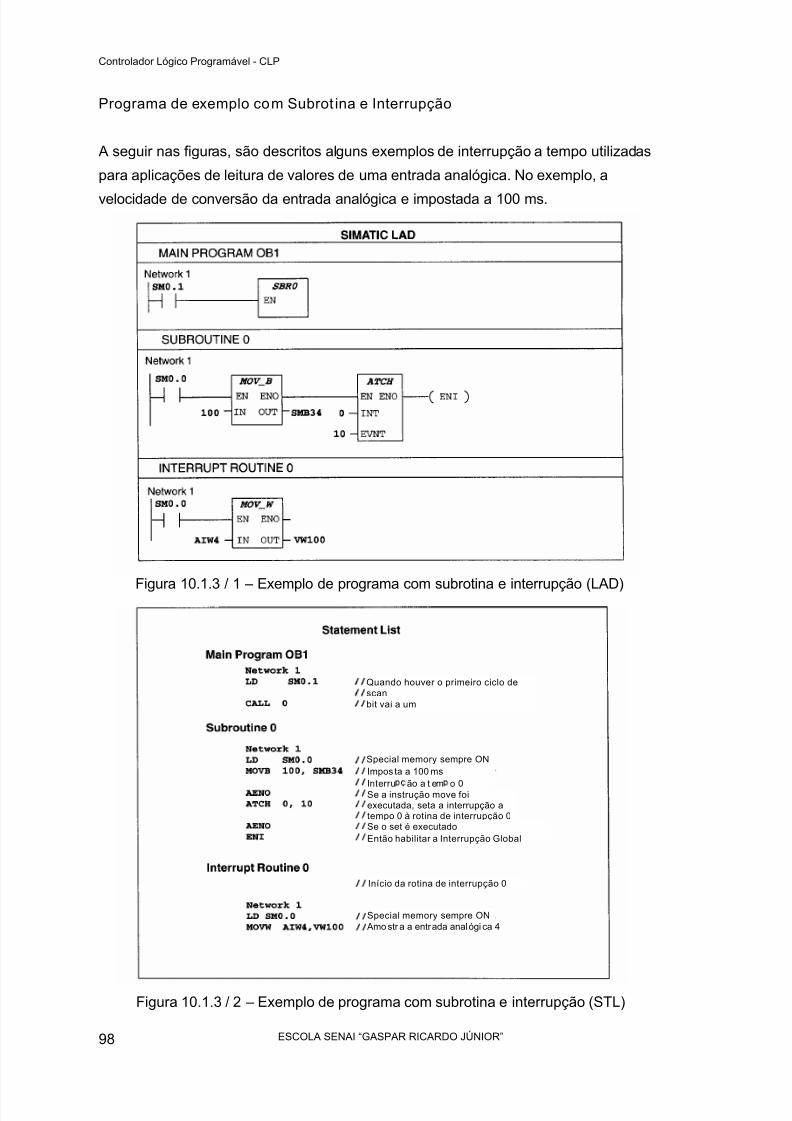
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 98/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 98
Quando houver o primeiro ciclo descan bit vai a um
Special memory sempre ONImpos ta a 100 ms
Interru ão a t em o 0Se a instrução move foiexecutada, seta a interrupção atempo 0 à rotina de interrupção 0Se o set é executadoEntão habilitar a Interrupção Global
Início da rotina de interrupção 0
Special memory sempre ON Amo str a a entrada analógi ca 4
Programa de exemplo com Subrot ina e Interrupção
A seguir nas figuras, são descritos alguns exemplos de interrupção a tempo utilizadas
para aplicações de leitura de valores de uma entrada analógica. No exemplo, a
velocidade de conversão da entrada analógica e impostada a 100 ms.
Figura 10.1.3 / 1 – Exemplo de programa com subrotina e interrupção (LAD)
Figura 10.1.3 / 2 – Exemplo de programa com subrotina e interrupção (STL)
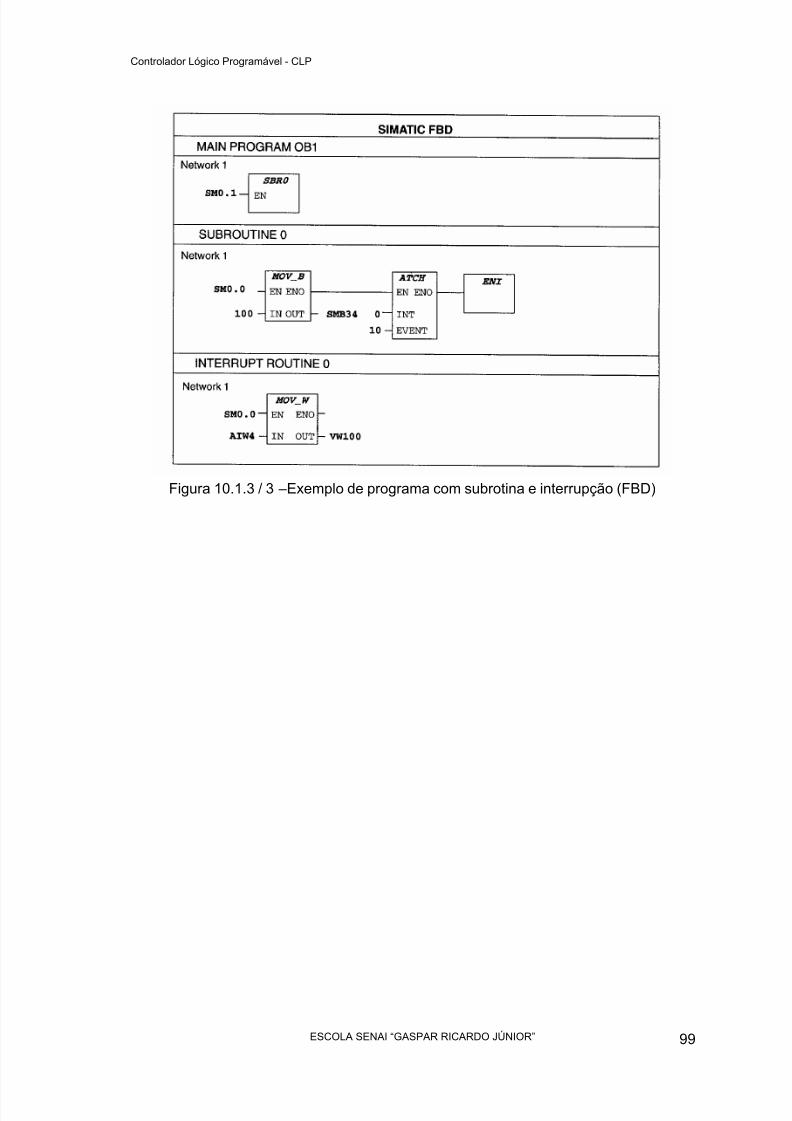
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 99/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 99
Figura 10.1.3 / 3 –Exemplo de programa com subrotina e interrupção (FBD)

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 100/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 100

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 101/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 101
11. Utilizando O Software STEP 7-Micro/WIN 32
A partir deste capítulo será iniciado a utilização da ferramenta de programação do
CLP, utilizando-se do software de programação STEP 7-Micro/WIN 32. As orientações
foram elaboradas passo a passo para melhor compreensão.
1. Acessar a área de trabalho do Windows;
2. Selecionar Iniciar > Simatic > STEP 7-MicroWin 32 V3.02 > STEP 7 MicroWIN 32;
3. Clicar duas vezes para abrir o software de programação do CLP.
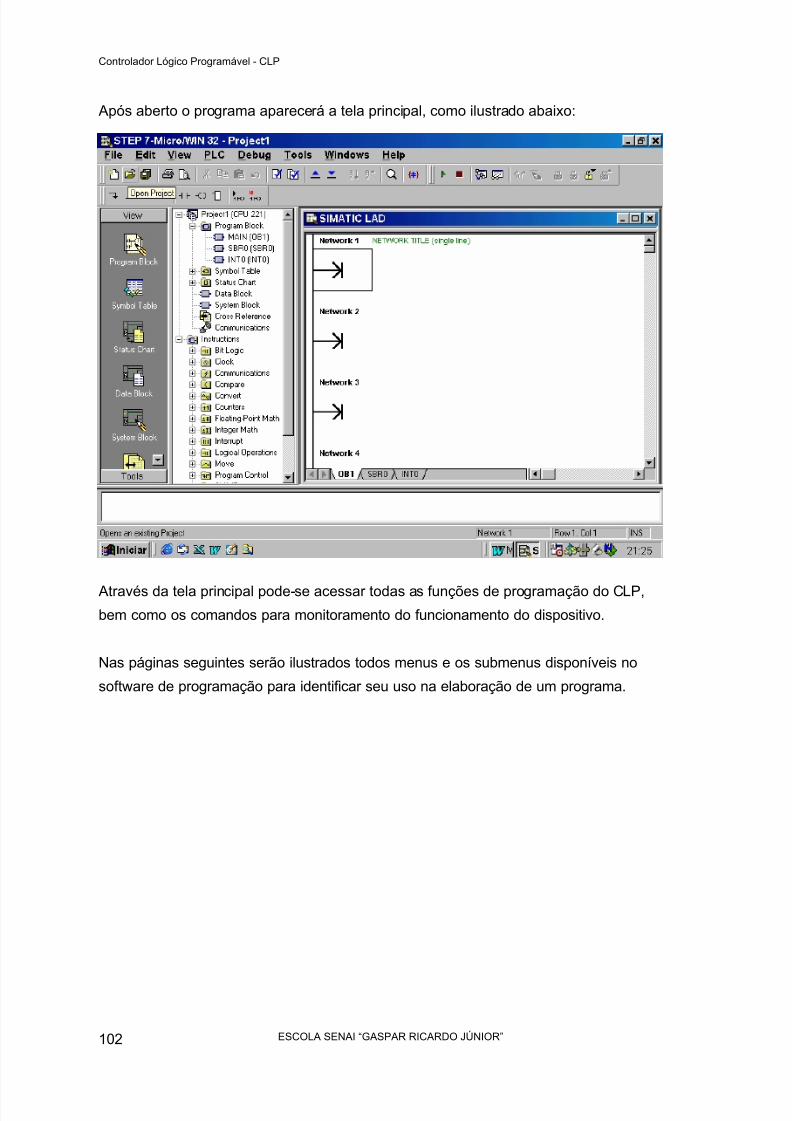
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 102/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 102
Após aberto o programa aparecerá a tela principal, como ilustrado abaixo:
Através da tela principal pode-se acessar todas as funções de programação do CLP,bem como os comandos para monitoramento do funcionamento do dispositivo.
Nas páginas seguintes serão ilustrados todos menus e os submenus disponíveis no
software de programação para identificar seu uso na elaboração de um programa.
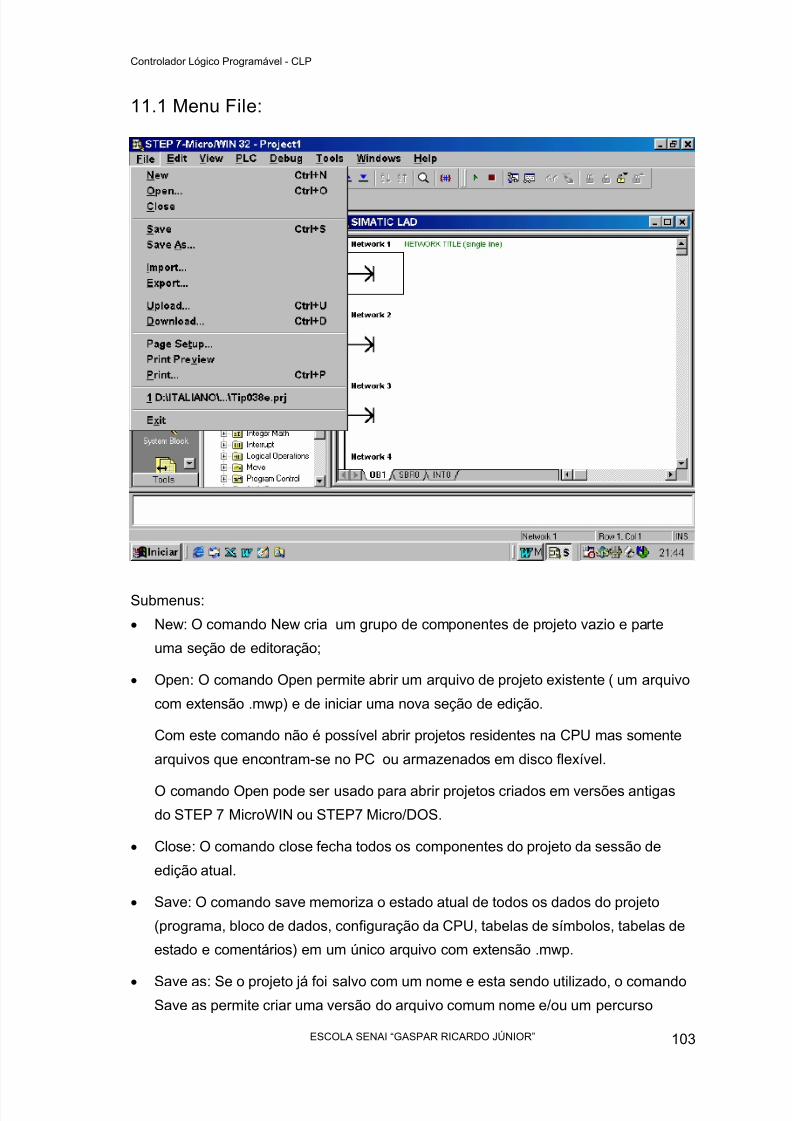
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 103/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 103
11.1 Menu File:
Submenus:
• New: O comando New cria um grupo de componentes de projeto vazio e parte
uma seção de editoração;
• Open: O comando Open permite abrir um arquivo de projeto existente ( um arquivo
com extensão .mwp) e de iniciar uma nova seção de edição.
Com este comando não é possível abrir projetos residentes na CPU mas somente
arquivos que encontram-se no PC ou armazenados em disco flexível.
O comando Open pode ser usado para abrir projetos criados em versões antigas
do STEP 7 MicroWIN ou STEP7 Micro/DOS.
• Close: O comando close fecha todos os componentes do projeto da sessão de
edição atual.
• Save: O comando save memoriza o estado atual de todos os dados do projeto
(programa, bloco de dados, configuração da CPU, tabelas de símbolos, tabelas de
estado e comentários) em um único arquivo com extensão .mwp.
• Save as: Se o projeto já foi salvo com um nome e esta sendo utilizado, o comandoSave as permite criar uma versão do arquivo comum nome e/ou um percurso
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 104/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 104
diverso. O comando memoriza o estado atual de todos os dados do projeto
(programa, bloco de dados, configuração da CPU, tabelas de símbolos, tabelas de
estado e comentários) em um único arquivo com extensão .mwp.
• Import: Este comando é utilizado quando deseja-se importar um programa de uma
fonte externa do software STEP 7-Micro/WIN 32, pode-se usar o comando Import
para o arquivo de texto ASCII. Um método simples para ver os requisitos do
formato de um arquivo de texto ASCII consiste em exportar um programa já
existente. Para visualizar o conteúdo do arquivo pode-se usar o bloco de notas do
Windows.
• Export: Este comando é usado quando deseja-se exportar um programa em um
editor externo a STEP 7-Micro/WIN 32, pode-se utilizar o comando Export paracriar um arquivo de texto ASCII. Por default vem impostado a extensão “ awl”, mas
o nome do arquivo pode ser escolhido liberadamente pelo usuário. Um método
simples para ver os requisitos do formato de um arquivo de texto ASCII consiste
em exportar um programa já existente. Para visualizar o conteúdo do arquivo pode-
se usar o bloco de notas do Windows.
• Upload: Para carregar o programa no PG/PC (da CPU ao editor), é necessário que
a comunicação com a CPU funcione corretamente. Assegura-se que o cabo de
conexão entre o hardware de rede e a CPU esteja em funcionamento.Selecione os blocos desejados (blocos de códigos, blocos de dados e o bloco de
sistema). Os componentes do programa selecionados são copiados da CPU no
projeto atualmente aberto. O usuário poderá então salvar o programa carregado no
PG/PC.
• Download: Este comando é usado para carregar na CPU (File>Download) um
componente do projeto do STEP7-MicroWIN32 na CPU. Selecione os blocos
desejados (blocos de códigos, bolos de dados e o bloco de sistema). Os
componentes do programa selecionados são copiados do projeto atualmenteaberto na CPU. O usuário poderá então executar o programa na CPU do CLP.
• Page Setup: Este comando serve para impostar o formato da pagina para a
impressão do projeto.
• Print Preview: Este comando visualiza a impressão do programa no monitor.
• Print: Para imprimir o projeto executado no editor STEP 7- MicroWIN 32.
• Exit: Para sair do programa de editoração STEP 7- MicroWIN 32
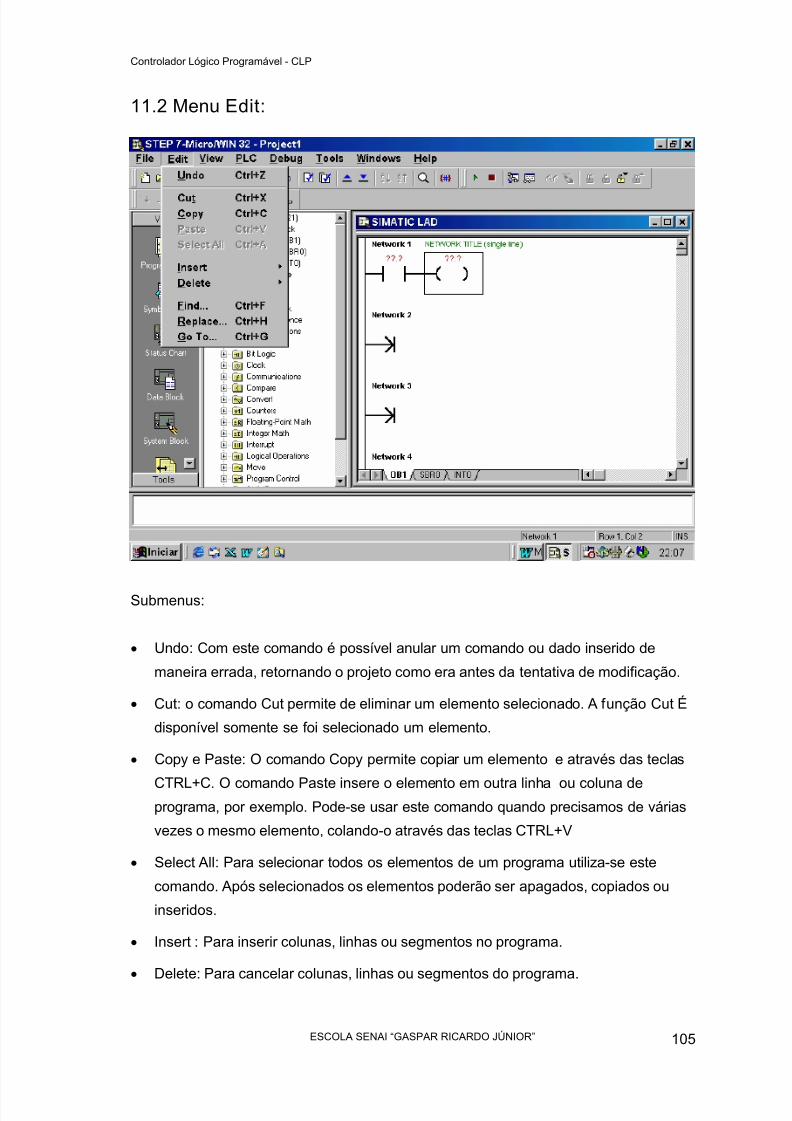
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 105/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 105
11.2 Menu Edit:
Submenus:
• Undo: Com este comando é possível anular um comando ou dado inserido de
maneira errada, retornando o projeto como era antes da tentativa de modificação.
• Cut: o comando Cut permite de eliminar um elemento selecionado. A função Cut É
disponível somente se foi selecionado um elemento.
• Copy e Paste: O comando Copy permite copiar um elemento e através das teclas
CTRL+C. O comando Paste insere o elemento em outra linha ou coluna deprograma, por exemplo. Pode-se usar este comando quando precisamos de várias
vezes o mesmo elemento, colando-o através das teclas CTRL+V
• Select All: Para selecionar todos os elementos de um programa utiliza-se este
comando. Após selecionados os elementos poderão ser apagados, copiados ou
inseridos.
• Insert : Para inserir colunas, linhas ou segmentos no programa.
• Delete: Para cancelar colunas, linhas ou segmentos do programa.
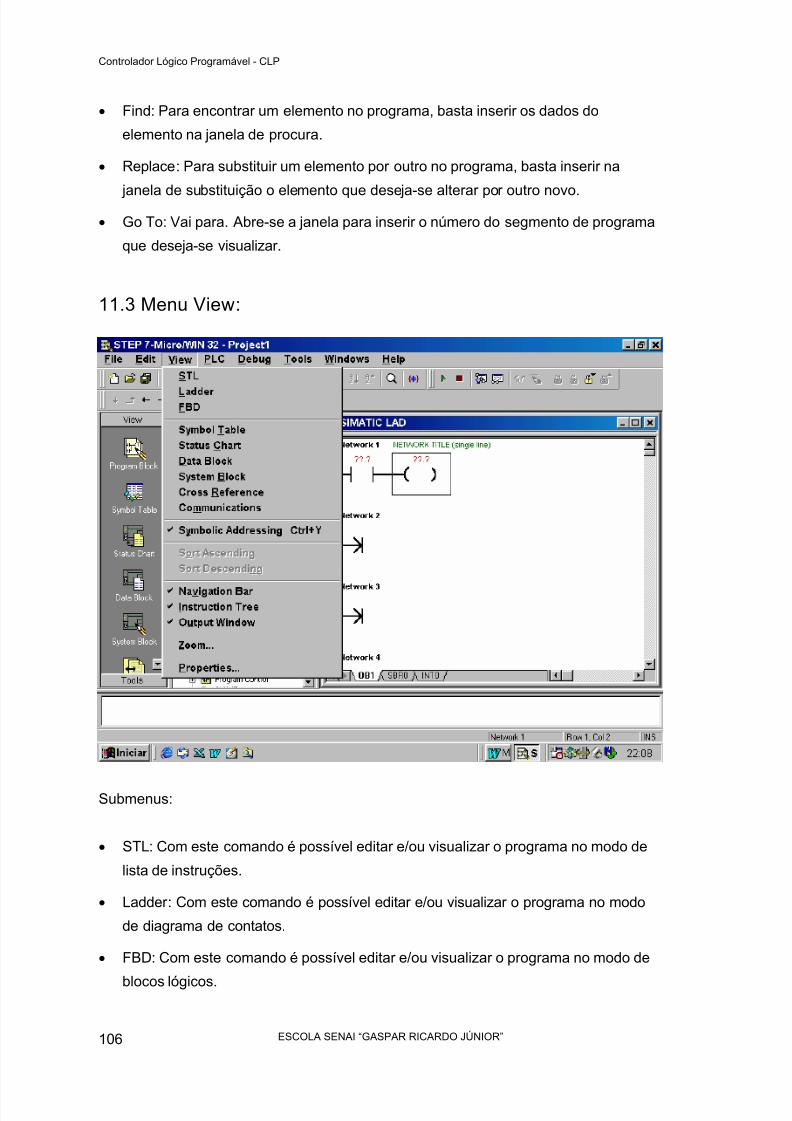
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 106/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 106
• Find: Para encontrar um elemento no programa, basta inserir os dados do
elemento na janela de procura.
• Replace: Para substituir um elemento por outro no programa, basta inserir na
janela de substituição o elemento que deseja-se alterar por outro novo.• Go To: Vai para. Abre-se a janela para inserir o número do segmento de programa
que deseja-se visualizar.
11.3 Menu View:
Submenus:
• STL: Com este comando é possível editar e/ou visualizar o programa no modo de
lista de instruções.
• Ladder : Com este comando é possível editar e/ou visualizar o programa no modo
de diagrama de contatos.
• FBD: Com este comando é possível editar e/ou visualizar o programa no modo de
blocos lógicos.

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 107/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 107
• Simbol Table: Com este comando é possível realizar a passagem entre
endereçamento simbólico e absoluto. Uma vez associado os símbolos absolutos e
simbólicos em uma tabela dos símbolos/tabela das variáveis globais, é possível
passar da visualização absoluta a simbólica dos endereços de parâmetros com o
comando View>Simbolic Adressing ou com a combinação de teclas CTRL+Y. Os
nomes simbólicos permitem de simplificar a criação e a gestão do projeto. A tabela
dos símbolos das variáveis globais colocam nomes simbólicos aos endereços de
memória da CPU e aos endereços de I/O. Definido um símbolo na tabela dos
símbolos das variáveis globais, o símbolo terá em âmbito de aplicação global. Isto
significa que o nome simbólico pode ser utilizado em qualquer unidade do
programa como referência aos dados colocados no relativo endereço ( ao invés
quando coloca-se um símbolo em uma tabela de variáveis locais, o símbolo ou
“variável local” terá um âmbito de aplicação limitado a unidade de programa a qualfoi definido).
• Status Chart: É possível criar uma ou mais tabelas de estados para efetuar o
controle e o teste das operações depois de ter carregado o programa no CLP. Se o
CLP é em RUN, o programa é executado em modo contínuo. No momento em que
se visualiza a tabela de estado, é possível também impostar o CLP em STOP e
utilizar a função de ciclo único ou vários ciclos para controlar as instruções do
programa para um número limitado de ciclos.
• Data Block: Os blocos de dados contém os dados memorizados em um campo de
endereços da memória V. Para criar um bloco de dados deve-se especificar os
endereços e os valores dos dados do programa. O editor do bloco de dados é um
editor de texto “livre”, não são portanto definido campos particulares para os tipos
específicos de informação.
• System Block: Configurar o bloco de sistema para impostação dos parâmetros da
CPU e selecionar as opções. Para compilar estas informações, selecionar a opção
Compile All ou carregar o programa na CPU. Para poder carregar um bloco de
sistema na CPU é necessário estabelecer corretamente a comunicação entre o PC
e a CPU do CLP, neste ponto é possível carregar o bloco de sistema e impostar a
CPU em uma nova configuração de sistema. Em alternativa, pode-se carregar da
CPU no PC um bloco de sistema existente para fazer de um modo que a
configuração do projeto corresponda a aquela da CPU.
• Cross Reference: Para abrir a janela de referência cruzada que mostra um elenco
dos elementos do programa e os números dos segmentos/linha e das instruções as
quais são utilizadas. O endereçamento simbólico visualiza a lista de referenciacruzada com endereços simbólicos ao invés que absoluto.
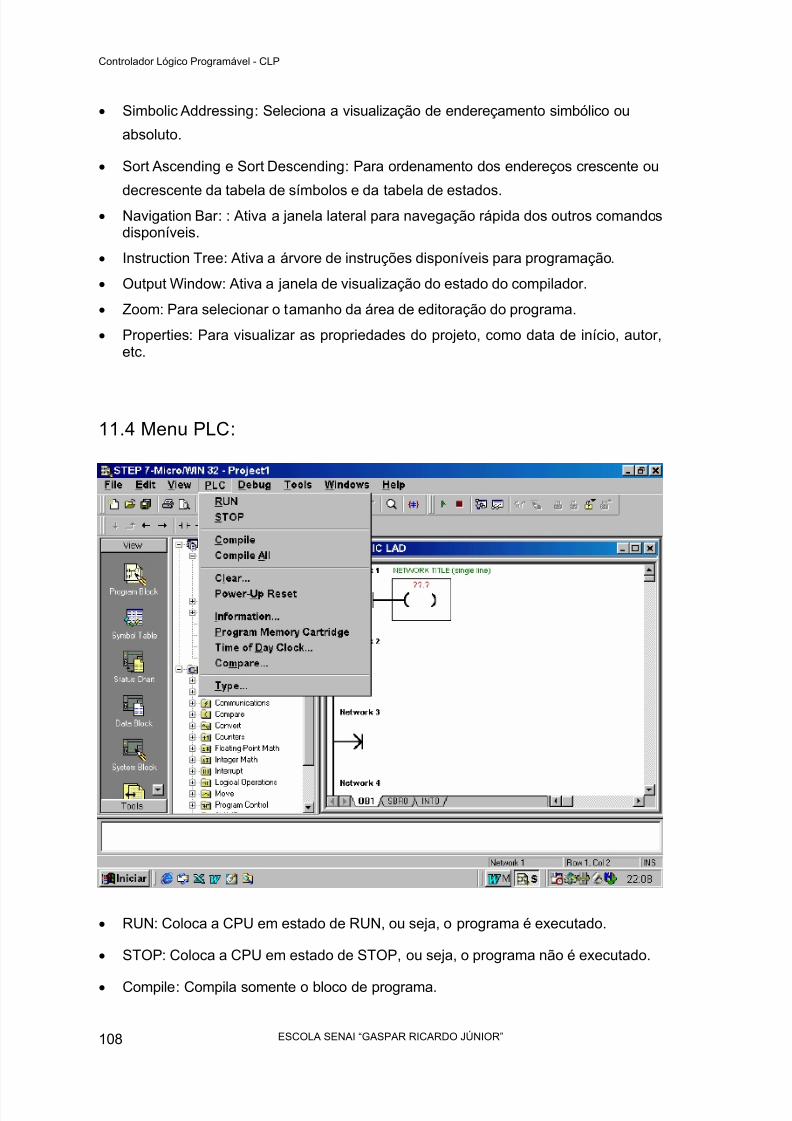
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 108/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 108
• Simbolic Addressing: Seleciona a visualização de endereçamento simbólico ou
absoluto.
• Sort Ascending e Sort Descending: Para ordenamento dos endereços crescente ou
decrescente da tabela de símbolos e da tabela de estados. • Navigation Bar : : Ativa a janela lateral para navegação rápida dos outros comandos
disponíveis.
• Instruction Tree: Ativa a árvore de instruções disponíveis para programação.
• Output Window: Ativa a janela de visualização do estado do compilador.
• Zoom: Para selecionar o tamanho da área de editoração do programa.
• Properties: Para visualizar as propriedades do projeto, como data de início, autor,etc.
11.4 Menu PLC:
Submenus:
• RUN: Coloca a CPU em estado de RUN, ou seja, o programa é executado.
• STOP: Coloca a CPU em estado de STOP, ou seja, o programa não é executado.
• Compile: Compila somente o bloco de programa.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 109/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 109
• Complie All: Compila todos os blocos do projeto.
• Clear : Para resetar áreas de memórias selecionadas da CPU.
• Power-up Reset: O comando de reset no funcionamento, consente de zerar os
erros fatais da CPU e retornar o modo RUN. Caso verificado em erro fatal em umaCPU em função, acende-se o LED SF (System Fault) e o programa para de ser
executado. Para eliminar o erro deve-se impostar a CPU em modo STOP e depois
em RUN. Esta operação pode ser efetuada em modo remoto com este comando ou
manualmente com a chave de modo de funcionamento instalada na CPU (Chave
STOP, RUN, TERM)
• Information: Para visualizar informações da CPU, qual o modelo e a versão, o
modo de funcionamento, a velocidade de scan, a configuração de I/O e os erros da
CPU e da unidade de I/O.
• Program Memory Cartrigde: Para programar um módulo de memória opcional
utilizado como memória EEPROM portátil para o programa.
• Time of Day Clock: Para visualizar ou impostar a ora e a data atual memorizadas
na CPU.
• Compare: Para confrontar os componentes do projeto STEP 7-Micro/WIN 32 com
um da CPU. Escolher uma, duas ou três áreas do projeto (bloco de códigos, bloco
de dados ou blocos de sistema) que deseja-se confrontar com o conteúdo da CPU.São confrontados o projeto atualmente aberto e o projeto contido na CPU.
• Type: Para selecionar o modelo da CPU S7-200 para o programa e ativar o
controle da instruções e dos parâmetros no editor e no compilador do STEP 7-
Micro/WIN 32.
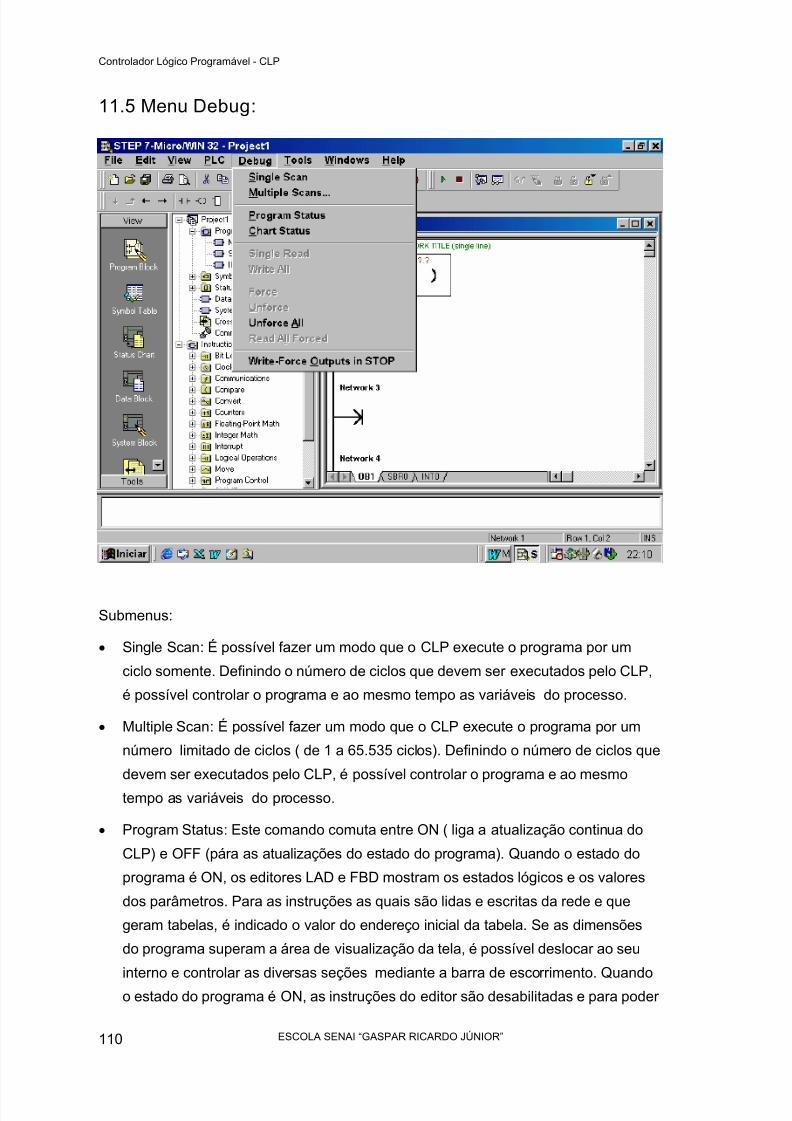
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 110/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 110
11.5 Menu Debug:
Submenus:
• Single Scan: É possível fazer um modo que o CLP execute o programa por um
ciclo somente. Definindo o número de ciclos que devem ser executados pelo CLP,
é possível controlar o programa e ao mesmo tempo as variáveis do processo.
• Multiple Scan: É possível fazer um modo que o CLP execute o programa por um
número limitado de ciclos ( de 1 a 65.535 ciclos). Definindo o número de ciclos que
devem ser executados pelo CLP, é possível controlar o programa e ao mesmo
tempo as variáveis do processo.
• Program Status: Este comando comuta entre ON ( liga a atualização continua do
CLP) e OFF (pára as atualizações do estado do programa). Quando o estado do
programa é ON, os editores LAD e FBD mostram os estados lógicos e os valores
dos parâmetros. Para as instruções as quais são lidas e escritas da rede e que
geram tabelas, é indicado o valor do endereço inicial da tabela. Se as dimensões
do programa superam a área de visualização da tela, é possível deslocar ao seu
interno e controlar as diversas seções mediante a barra de escorrimento. Quando
o estado do programa é ON, as instruções do editor são desabilitadas e para poder
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 111/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 111
entrar novamente na editoração é necessário impostar o estado do programa em
OFF. Se o estado do programa é ON, é possível forçar os valores dos parâmetros.
• Chart Status: É possível criar uma o mais tabelas de estado para efetuar o controle
e o teste das instruções depois de ter carregado o programa no CLP. Se o CLP éem RUN, o programa é executado em modo contínuo. No momento que visualiza-
se uma tabela de estado, é possível também impostar o CLP em STOP e utilizar a
Função de Ciclo Simples ou Vários Ciclos para controlar as instruções do programa
por um número limitado de ciclos.
• Single Read: A leitura individual é utilizada para efetuar uma atualização do estado
do programa para todos os valores. Por default, o estado da tabela pede
continuamente ao CLP atualizar o estado da variável.
• Write All: Escreve tudo. Uma vez terminado a modificação da coluna Novo Valor databela de estado, é possível utilizar este comando para enviar ao CLP as
modificações desejadas.
• Force: Para forçar um endereço em um dado valor, deve-se antes de tudo estipular
o valor desejado, lendo (para forçar o valor atual) ou digitando ( para forçar o
endereço com o novo valor). Uma vez utilizada a função de forçar, o valor é
reaplicado ao endereço a cada ciclo de scan, até que não seja desforçado o
endereço. STEP 7-Micro/WIN 32 permite forçar os endereços seja do estado do
programa, que da tabela de estado.
• Unforce: Selecionar um endereço e utilizar o Unforce (desforçar) para desativar o
forçamento.
• Unforce All: Quando desejado eliminar o forçamento de todos os endereços, pode-
se utilizar a função desforça tudo. Para poder executar este comando não é
necessário selecionar os endereços individualmente.
• Read All Forced: Quando utilizada esta função, a coluna do valor corrente das
tabelas de estado visualiza-se um ícone para os endereços que foram forçados emmodo explicito, em modo implícito ou somente em parte no modo implícito.
• Write-Force OutPuts in STOP: Habilita a função de escrita e forçamento em modo
STOP. Os sistemas S7-200 suportam a escrita e o forçamento das saídas ( ambas
as digitais e analógicas) com a CPU em STOP. Por motivo de segurança, esta
função pode ser habilitada no STEP 7-Micro/WIN 32 somente com um especifico
comando. ADVERTÊNCIA: se o CLP é conectado aos atuadores de processo no
momento em que se está fazendo a escrita ou o forçamento das saídas, esta
variação poderá transmitir aos atuadores e provocar reações incontroladas noprocesso com conseqüências de graves danos a pessoas ou equipamentos.
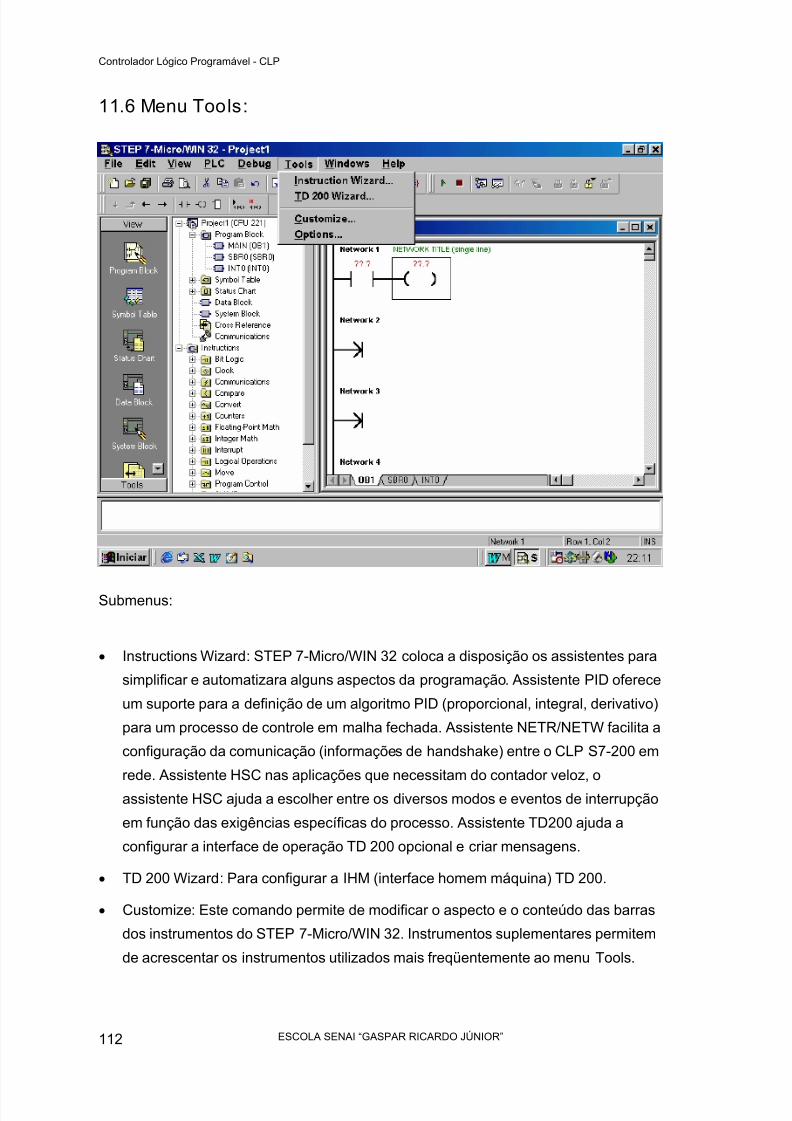
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 112/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 112
11.6 Menu Tools:
Submenus:
• Instructions Wizard: STEP 7-Micro/WIN 32 coloca a disposição os assistentes para
simplificar e automatizara alguns aspectos da programação. Assistente PID oferece
um suporte para a definição de um algoritmo PID (proporcional, integral, derivativo)
para um processo de controle em malha fechada. Assistente NETR/NETW facilita a
configuração da comunicação (informações de handshake) entre o CLP S7-200 em
rede. Assistente HSC nas aplicações que necessitam do contador veloz, o
assistente HSC ajuda a escolher entre os diversos modos e eventos de interrupção
em função das exigências específicas do processo. Assistente TD200 ajuda a
configurar a interface de operação TD 200 opcional e criar mensagens.
• TD 200 Wizard: Para configurar a IHM (interface homem máquina) TD 200.
• Customize: Este comando permite de modificar o aspecto e o conteúdo das barras
dos instrumentos do STEP 7-Micro/WIN 32. Instrumentos suplementares permitem
de acrescentar os instrumentos utilizados mais freqüentemente ao menu Tools.

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 113/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 113
• Options: O comando de menu Tools permite de configurar as opções de selecionar
o editor de programa, o set de mnemônicos, o modo e a língua. Também permite
de selecionar o formato do horário, formato da data e das cores das diversas
janelas do software STEP 7-Micro/WIN 32.

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 114/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 114
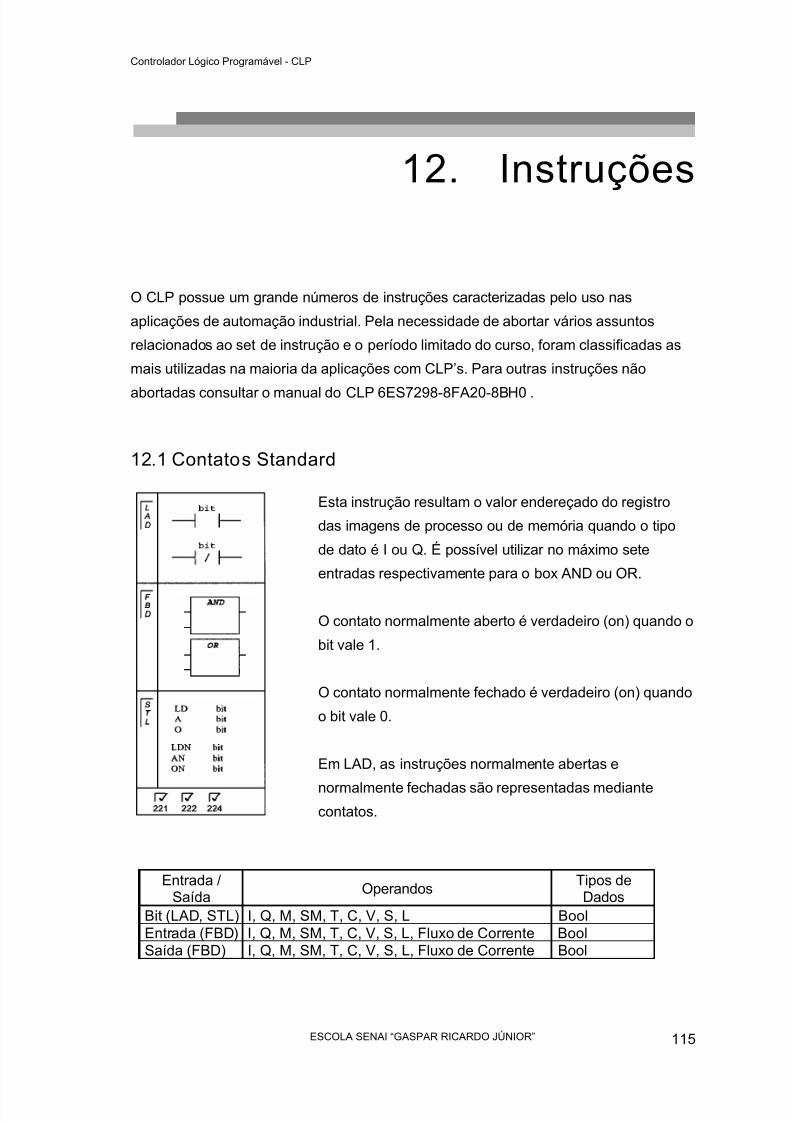
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 115/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 115
12. Instruções
O CLP possue um grande números de instruções caracterizadas pelo uso nas
aplicações de automação industrial. Pela necessidade de abortar vários assuntos
relacionados ao set de instrução e o período limitado do curso, foram classificadas as
mais utilizadas na maioria da aplicações com CLP’s. Para outras instruções não
abortadas consultar o manual do CLP 6ES7298-8FA20-8BH0 .
12.1 Contatos Standard
Esta instrução resultam o valor endereçado do registro
das imagens de processo ou de memória quando o tipo
de dato é I ou Q. É possível utilizar no máximo sete
entradas respectivamente para o box AND ou OR.
O contato normalmente aberto é verdadeiro (on) quando o
bit vale 1.
O contato normalmente fechado é verdadeiro (on) quando
o bit vale 0.
Em LAD, as instruções normalmente abertas e
normalmente fechadas são representadas mediantecontatos.
Entrada /Saída
OperandosTipos deDados
Bit (LAD, STL) I, Q, M, SM, T, C, V, S, L BoolEntrada (FBD) I, Q, M, SM, T, C, V, S, L, Fluxo de Corrente BoolSaída (FBD) I, Q, M, SM, T, C, V, S, L, Fluxo de Corrente Bool

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 116/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 116
Como introduzir a instrução de contatos standard usando o software de programação:
Anotações:
1ª opção: Selecionarna barra de instruçãorápida o contato quedeseja-se inserir noprograma. Abriráuma janela próximaao espaço dainstrução e escolhero contato desejado
2ª opção: Usar ocontato desejadocontido na árvorede instrução.
Janela de seleçãoda 1ª opção
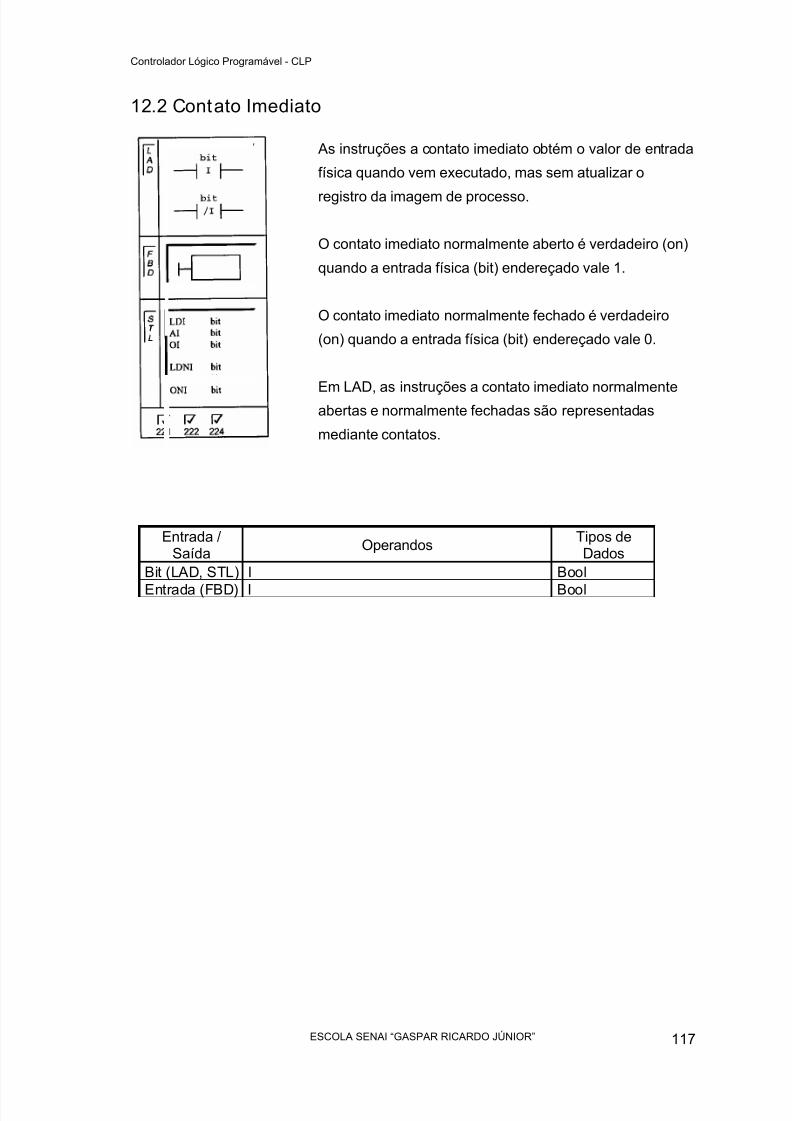
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 117/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 117
12.2 Contato Imediato
As instruções a contato imediato obtém o valor de entrada
física quando vem executado, mas sem atualizar o
registro da imagem de processo.
O contato imediato normalmente aberto é verdadeiro (on)
quando a entrada física (bit) endereçado vale 1.
O contato imediato normalmente fechado é verdadeiro
(on) quando a entrada física (bit) endereçado vale 0.
Em LAD, as instruções a contato imediato normalmenteabertas e normalmente fechadas são representadas
mediante contatos.
Entrada /Saída
OperandosTipos deDados
Bit (LAD, STL) I Bool
Entrada (FBD) I Bool
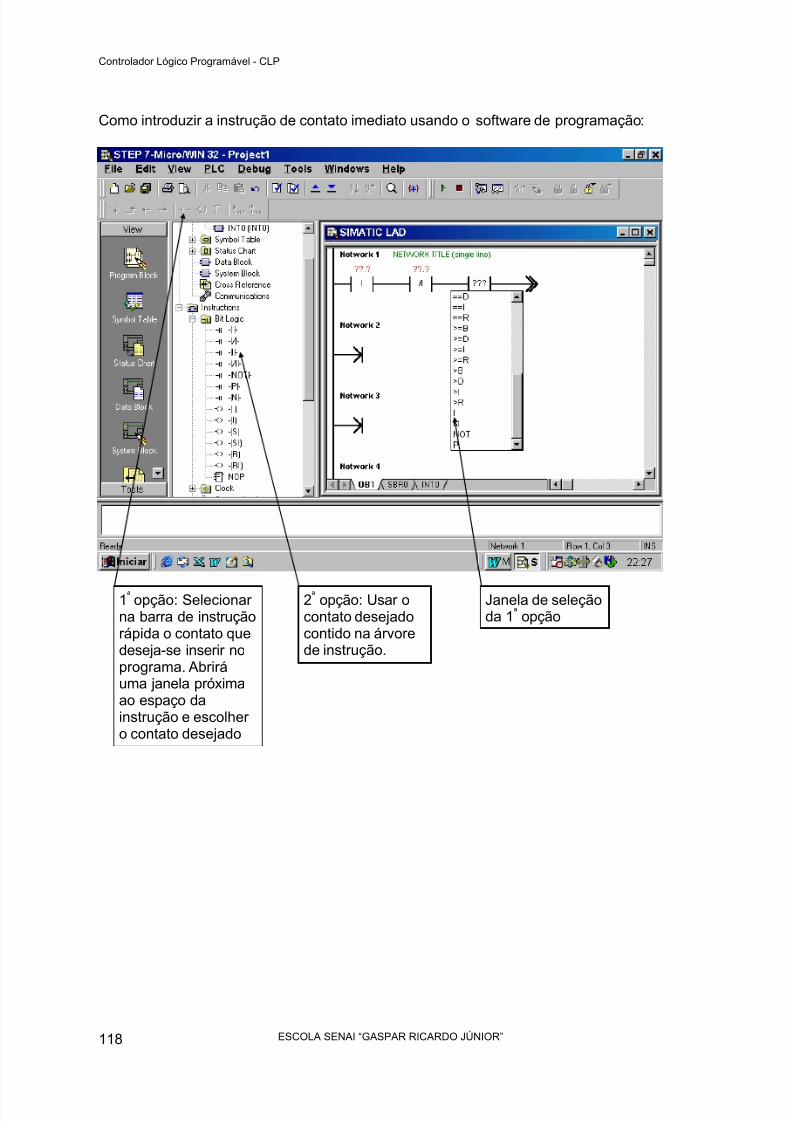
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 118/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 118
Como introduzir a instrução de contato imediato usando o software de programação:
1ª opção: Selecionarna barra de instruçãorápida o contato quedeseja-se inserir noprograma. Abriráuma janela próximaao espaço dainstrução e escolhero contato desejado
2ª opção: Usar ocontato desejadocontido na árvorede instrução.
Janela de seleçãoda 1ª opção
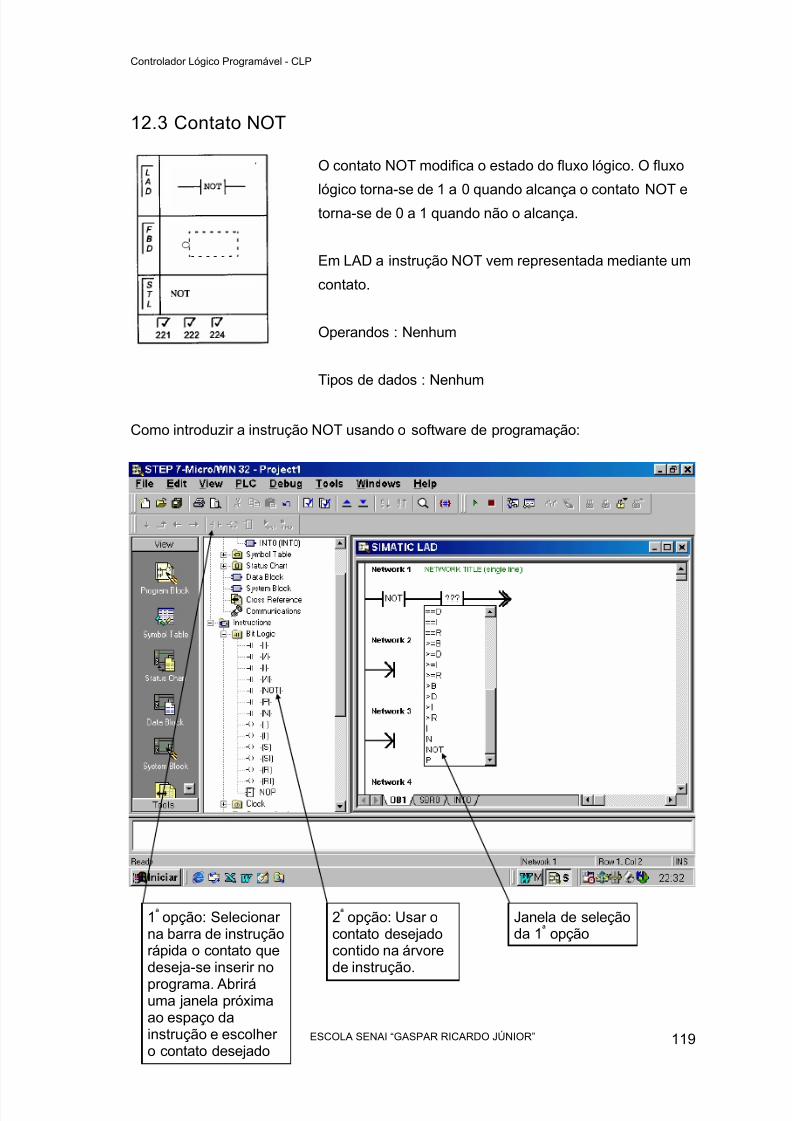
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 119/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 119
12.3 Contato NOT
O contato NOT modifica o estado do fluxo lógico. O fluxo
lógico torna-se de 1 a 0 quando alcança o contato NOT etorna-se de 0 a 1 quando não o alcança.
Em LAD a instrução NOT vem representada mediante um
contato.
Operandos : Nenhum
Tipos de dados : Nenhum
Como introduzir a instrução NOT usando o software de programação:
1ª opção: Selecionarna barra de instruçãorápida o contato quedeseja-se inserir no
programa. Abriráuma janela próximaao espaço dainstrução e escolhero contato desejado
2ª opção: Usar ocontato desejadocontido na árvorede instrução.
Janela de seleçãoda 1ª opção
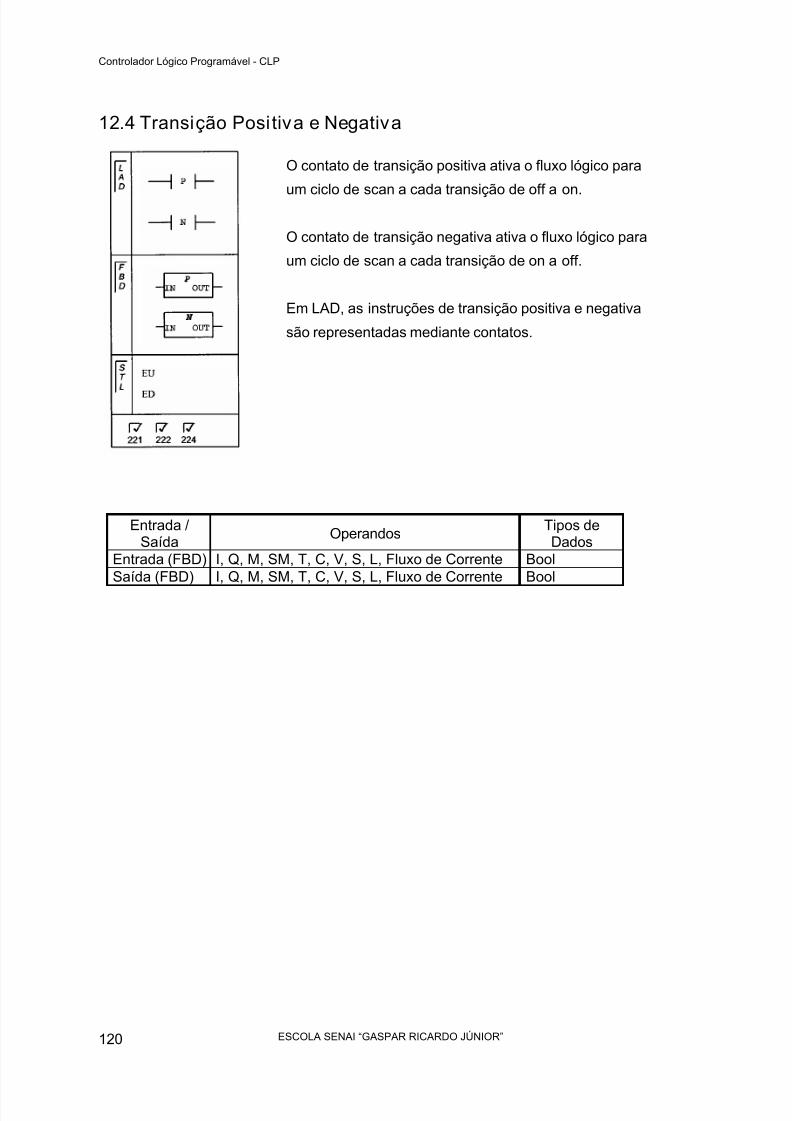
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 120/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 120
12.4 Transição Positiva e Negativa
O contato de transição positiva ativa o fluxo lógico para
um ciclo de scan a cada transição de off a on.
O contato de transição negativa ativa o fluxo lógico para
um ciclo de scan a cada transição de on a off.
Em LAD, as instruções de transição positiva e negativa
são representadas mediante contatos.
Entrada /Saída
OperandosTipos deDados
Entrada (FBD) I, Q, M, SM, T, C, V, S, L, Fluxo de Corrente BoolSaída (FBD) I, Q, M, SM, T, C, V, S, L, Fluxo de Corrente Bool
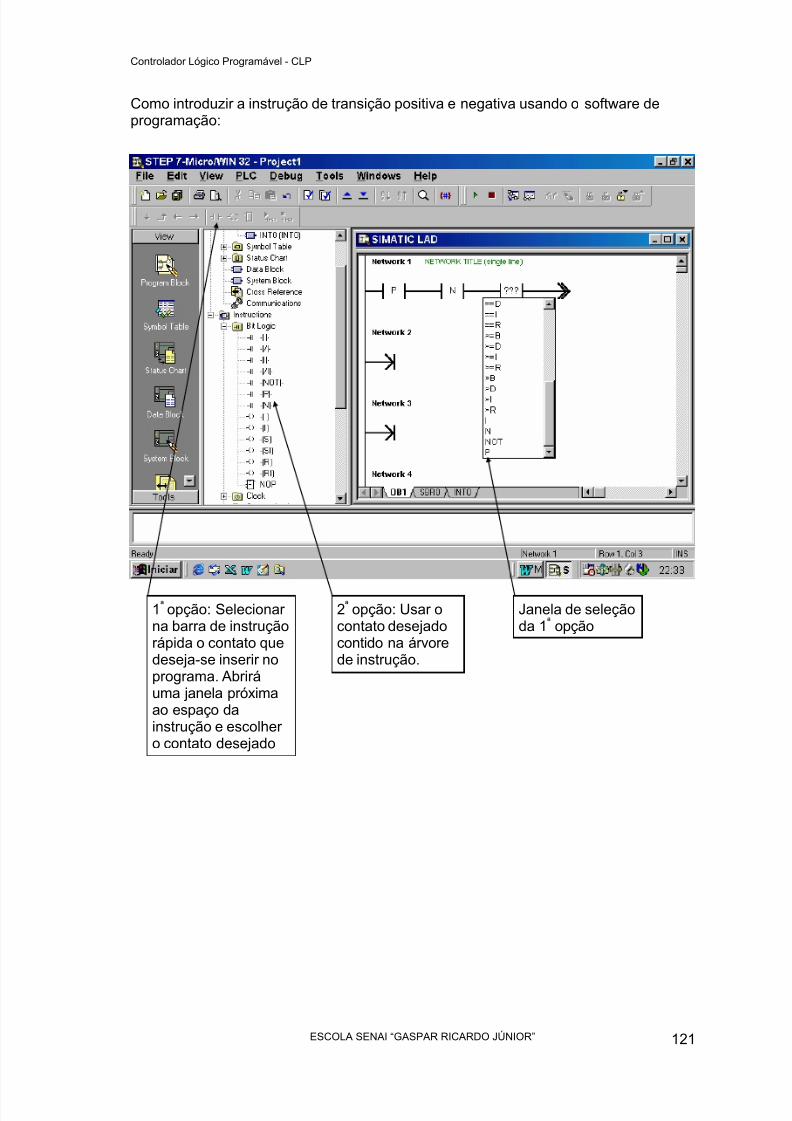
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 121/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 121
Como introduzir a instrução de transição positiva e negativa usando o software deprogramação:
1ª opção: Selecionarna barra de instruçãorápida o contato quedeseja-se inserir noprograma. Abriráuma janela próximaao espaço dainstrução e escolhero contato desejado
2ª opção: Usar ocontato desejadocontido na árvorede instrução.
Janela de seleçãoda 1ª opção

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 122/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 122
Exemplos Contatos
Diagrama de Tempo
ON por um scan
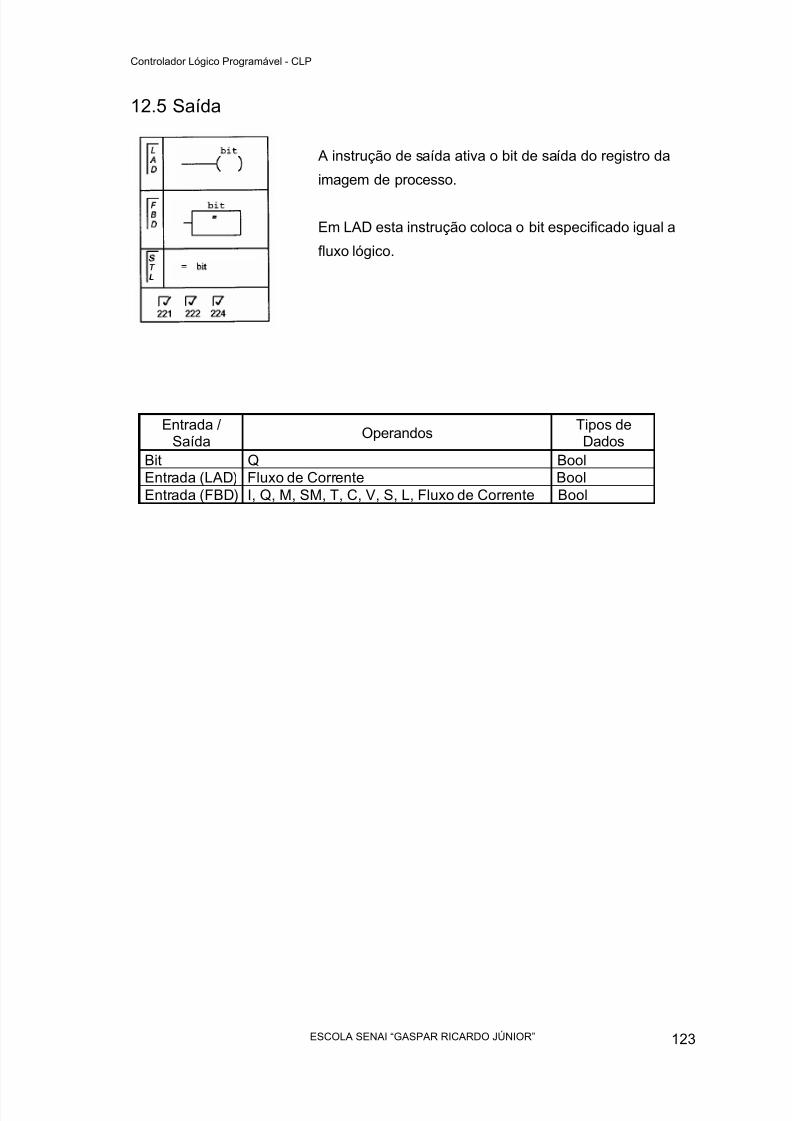
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 123/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 123
12.5 Saída
A instrução de saída ativa o bit de saída do registro da
imagem de processo.
Em LAD esta instrução coloca o bit especificado igual a
fluxo lógico.
Entrada /Saída
OperandosTipos deDados
Bit Q BoolEntrada (LAD) Fluxo de Corrente BoolEntrada (FBD) I, Q, M, SM, T, C, V, S, L, Fluxo de Corrente Bool
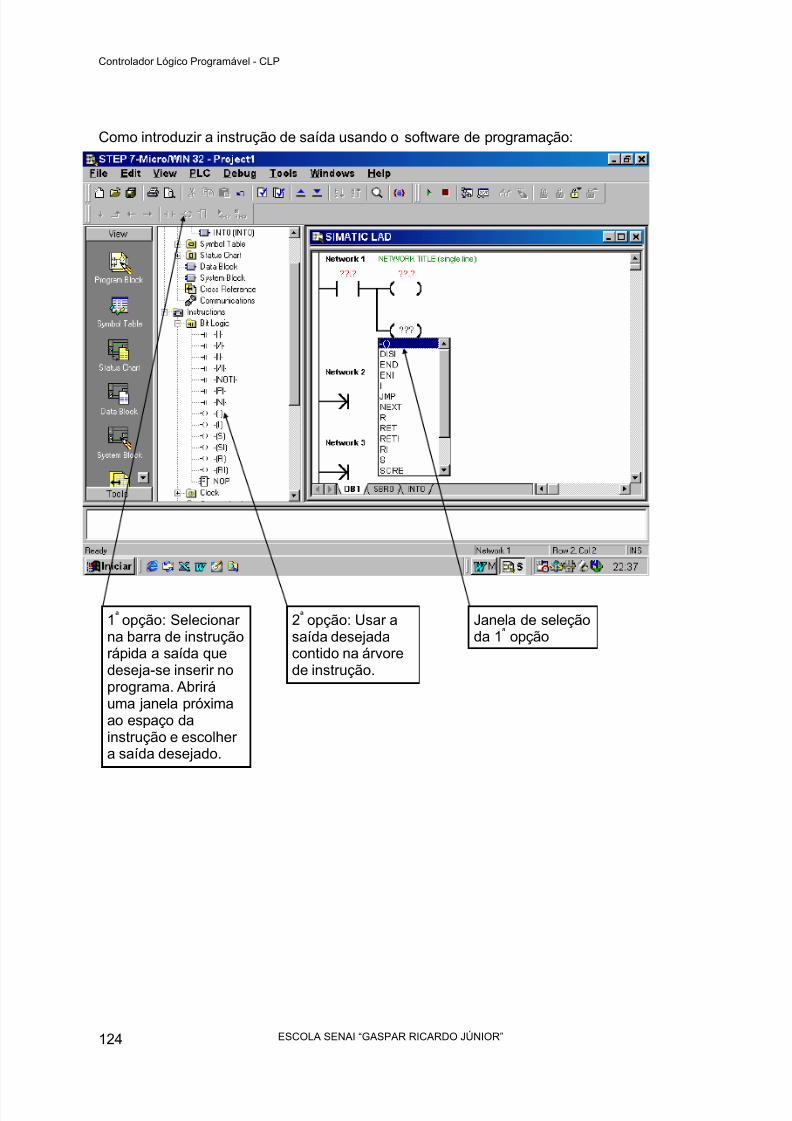
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 124/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 124
Como introduzir a instrução de saída usando o software de programação:
7
1ª opção: Selecionarna barra de instruçãorápida a saída quedeseja-se inserir noprograma. Abriráuma janela próximaao espaço dainstrução e escolhera saída desejado.
2ª opção: Usar asaída desejadacontido na árvorede instrução.
Janela de seleçãoda 1ª opção
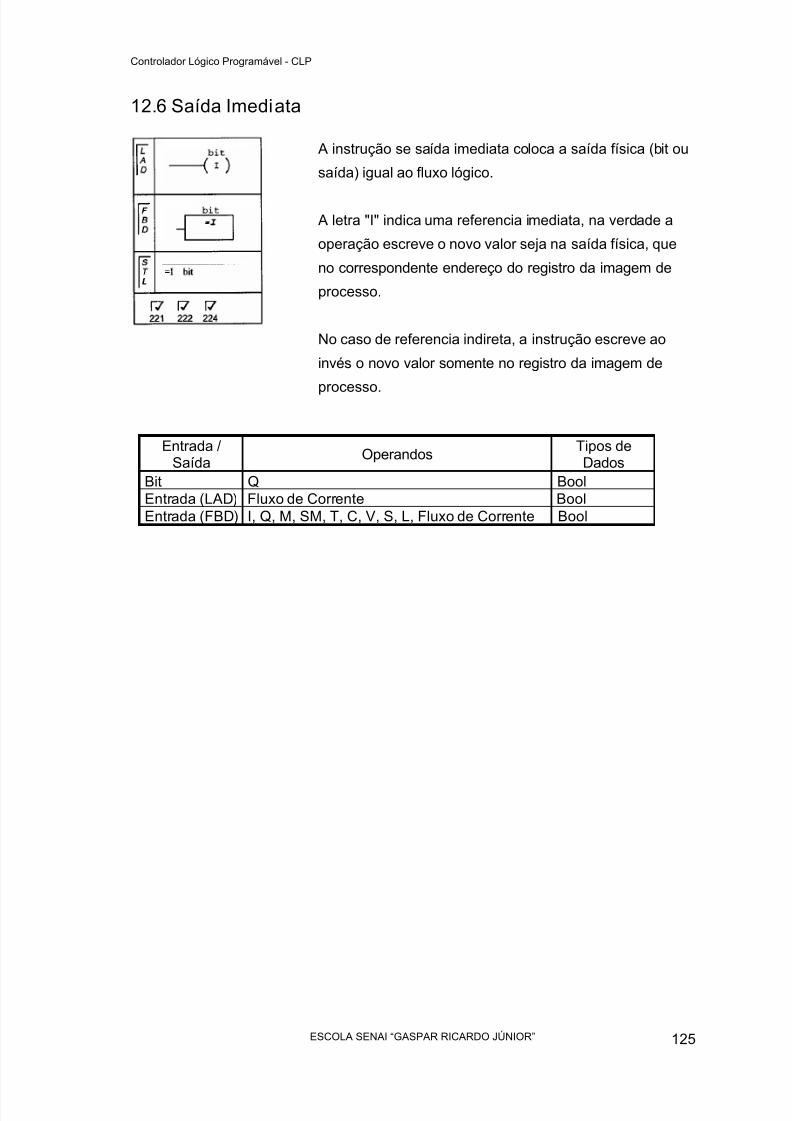
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 125/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 125
12.6 Saída Imediata
A instrução se saída imediata coloca a saída física (bit ou
saída) igual ao fluxo lógico.
A letra "I" indica uma referencia imediata, na verdade a
operação escreve o novo valor seja na saída física, que
no correspondente endereço do registro da imagem de
processo.
No caso de referencia indireta, a instrução escreve ao
invés o novo valor somente no registro da imagem de
processo.
Entrada /Saída
OperandosTipos deDados
Bit Q BoolEntrada (LAD) Fluxo de Corrente BoolEntrada (FBD) I, Q, M, SM, T, C, V, S, L, Fluxo de Corrente Bool
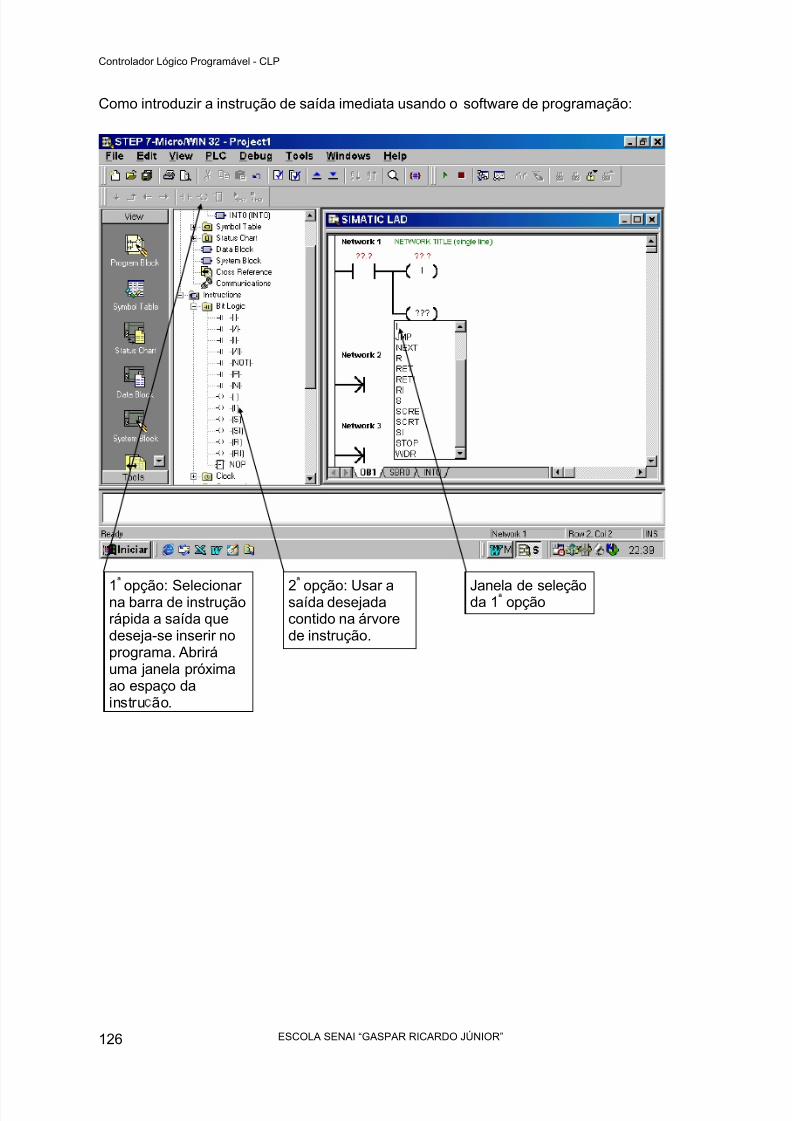
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 126/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 126
Como introduzir a instrução de saída imediata usando o software de programação:
1ª
opção: Selecionarna barra de instruçãorápida a saída quedeseja-se inserir noprograma. Abriráuma janela próximaao espaço dainstru ão.
2ª
opção: Usar asaída desejadacontido na árvorede instrução.
Janela de seleçãoda 1ª opção
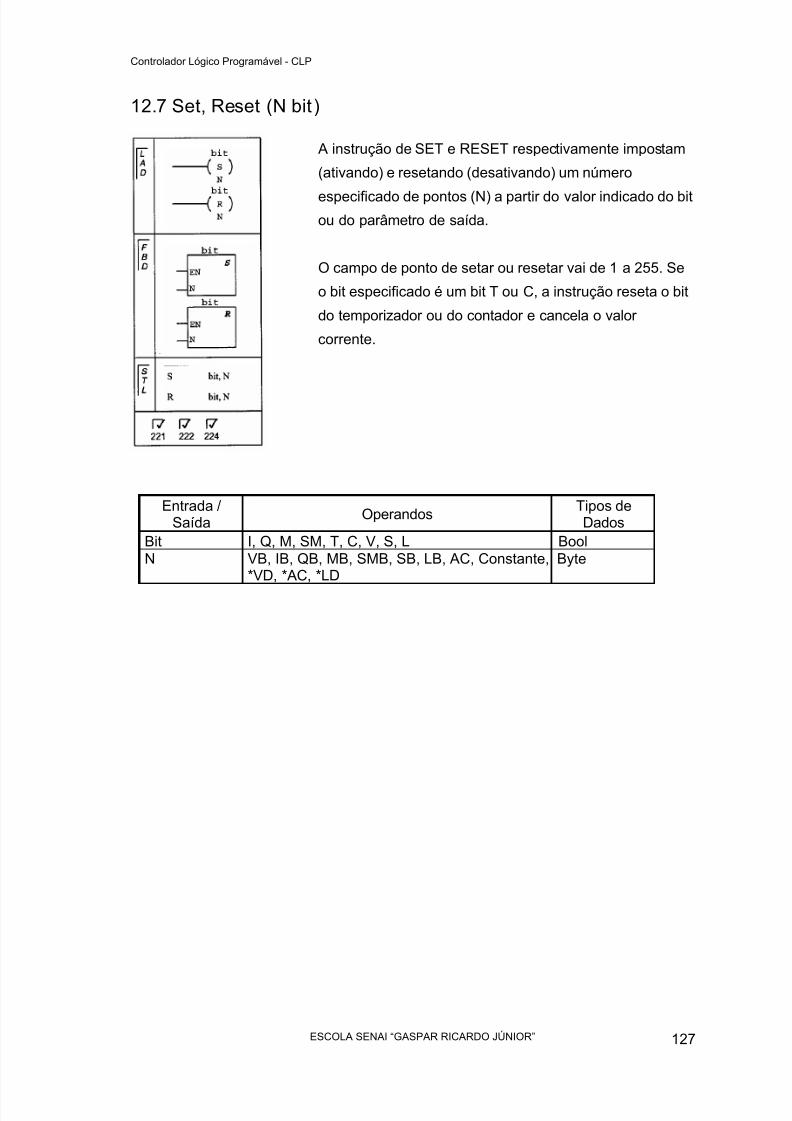
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 127/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 127
12.7 Set, Reset (N bit )
A instrução de SET e RESET respectivamente impostam
(ativando) e resetando (desativando) um número
especificado de pontos (N) a partir do valor indicado do bitou do parâmetro de saída.
O campo de ponto de setar ou resetar vai de 1 a 255. Se
o bit especificado é um bit T ou C, a instrução reseta o bit
do temporizador ou do contador e cancela o valor
corrente.
Entrada /Saída
OperandosTipos deDados
Bit I, Q, M, SM, T, C, V, S, L BoolN VB, IB, QB, MB, SMB, SB, LB, AC, Constante,
*VD, *AC, *LDByte
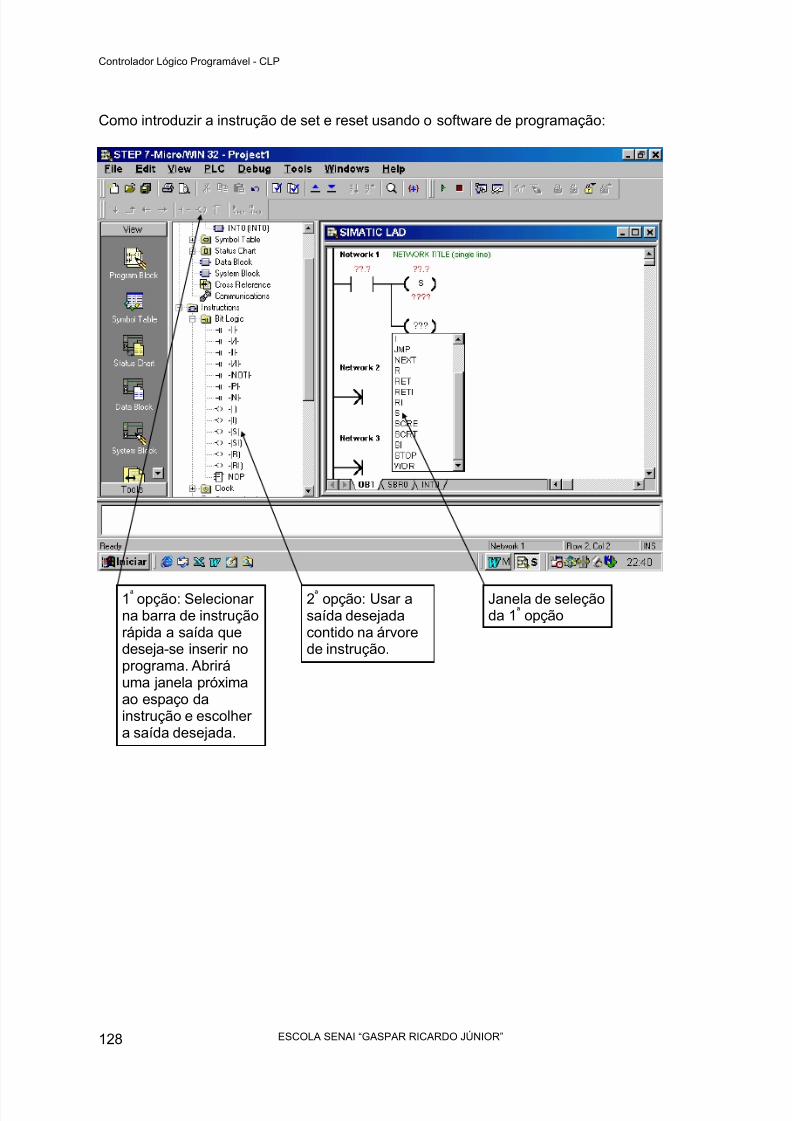
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 128/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 128
Como introduzir a instrução de set e reset usando o software de programação:
1ª opção: Selecionarna barra de instruçãorápida a saída quedeseja-se inserir noprograma. Abriráuma janela próximaao espaço dainstrução e escolhera saída desejada.
2ª opção: Usar asaída desejadacontido na árvorede instrução.
Janela de seleçãoda 1ª opção
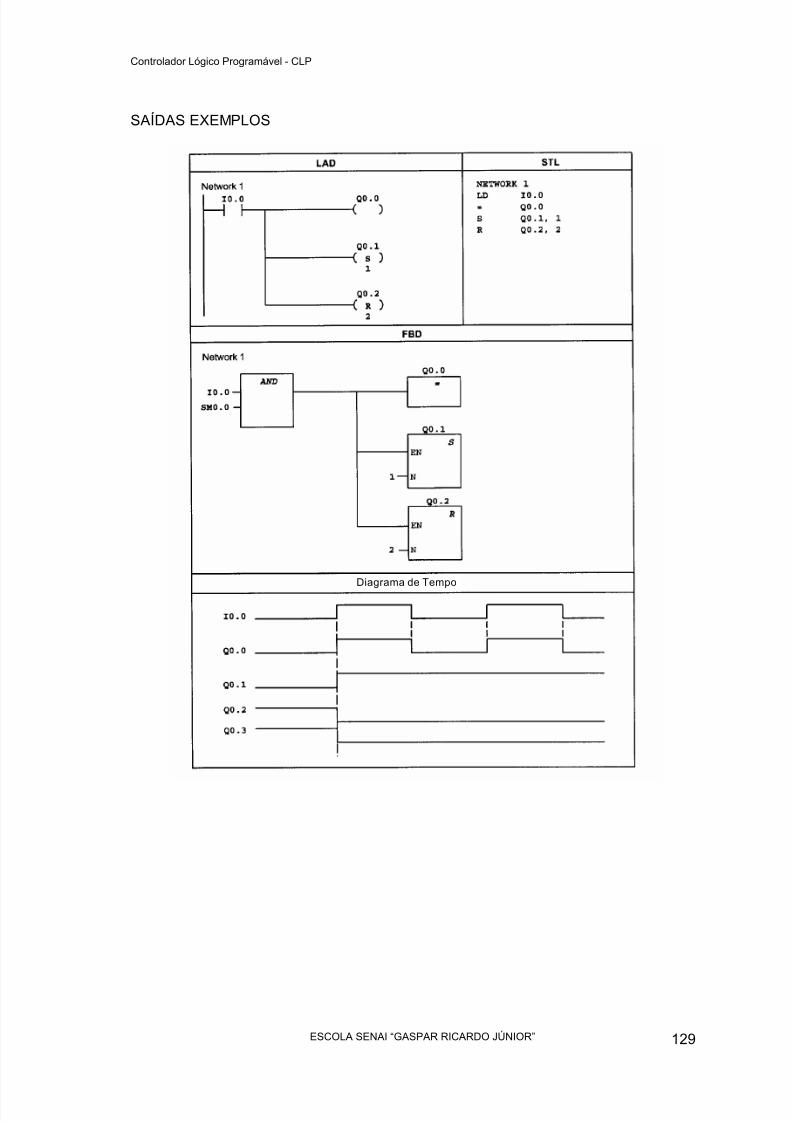
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 129/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 129
SAÍDAS EXEMPLOS
Diagrama de Tempo
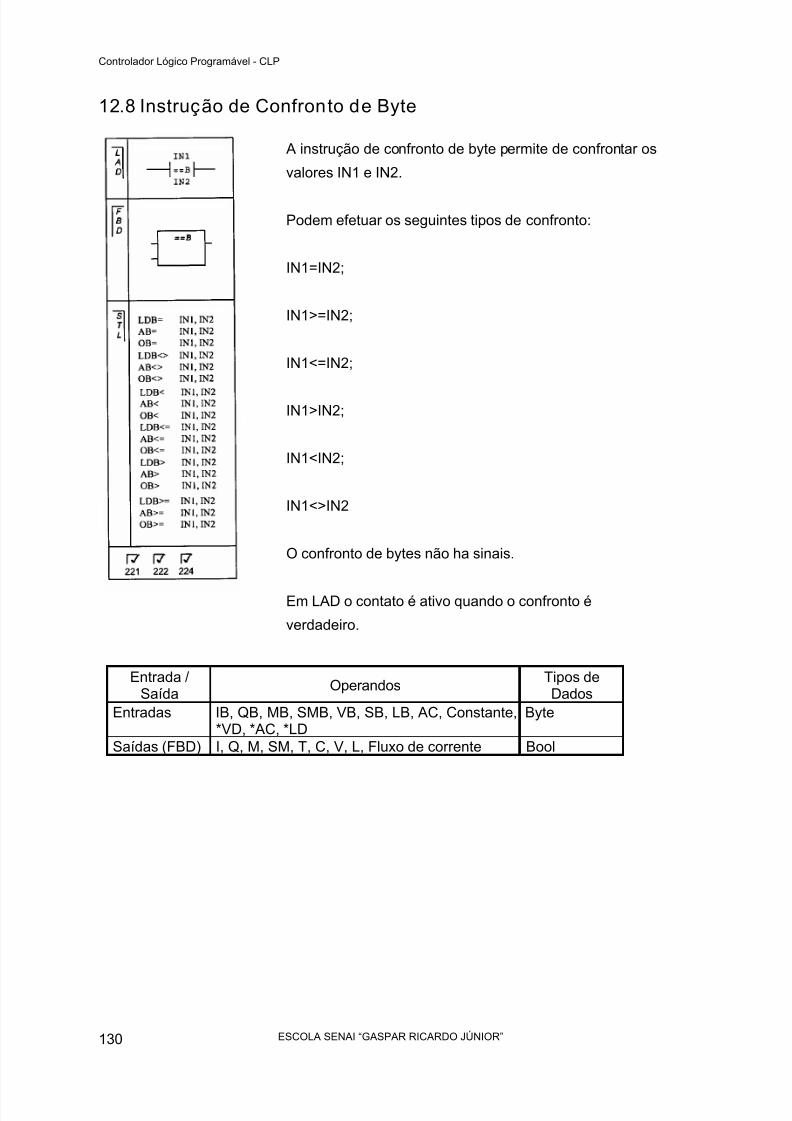
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 130/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 130
12.8 Instrução de Confronto de Byte
A instrução de confronto de byte permite de confrontar os
valores IN1 e IN2.
Podem efetuar os seguintes tipos de confronto:
IN1=IN2;
IN1>=IN2;
IN1<=IN2;
IN1>IN2;
IN1<IN2;
IN1<>IN2
O confronto de bytes não ha sinais.
Em LAD o contato é ativo quando o confronto é
verdadeiro.
Entrada /Saída
OperandosTipos deDados
Entradas IB, QB, MB, SMB, VB, SB, LB, AC, Constante,*VD, *AC, *LD
Byte
Saídas (FBD) I, Q, M, SM, T, C, V, L, Fluxo de corrente Bool
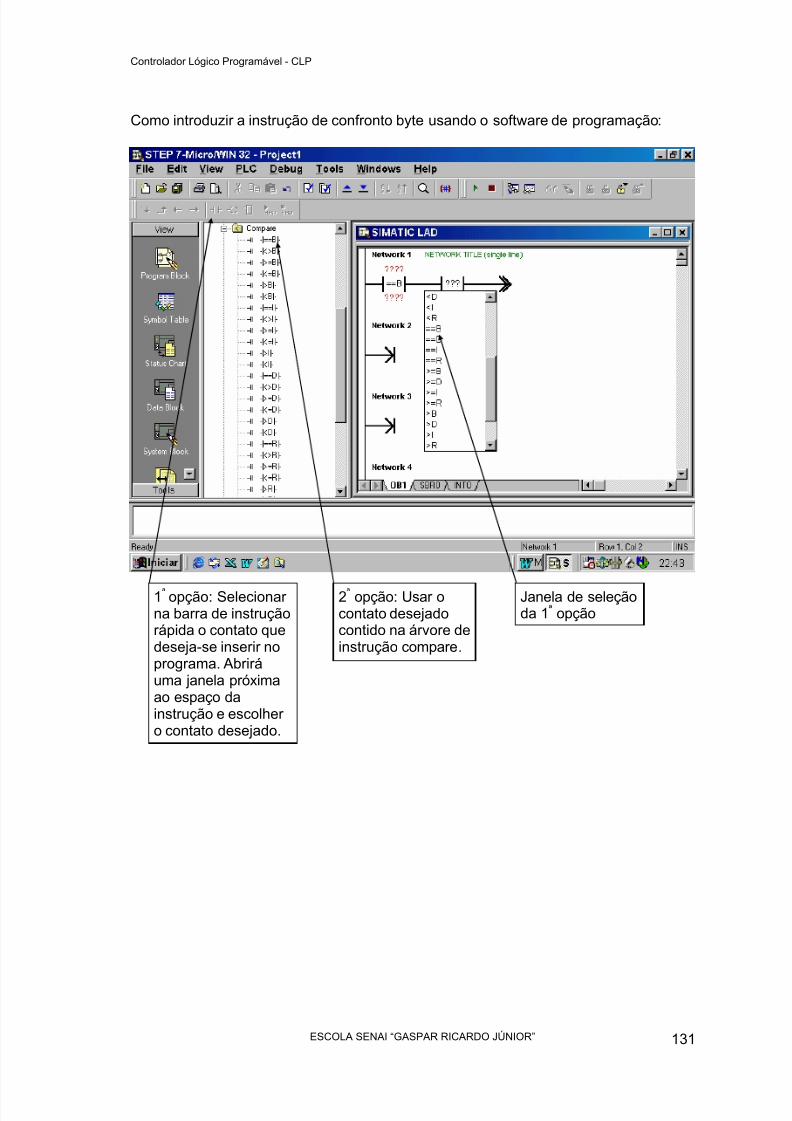
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 131/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 131
Como introduzir a instrução de confronto byte usando o software de programação:
1ª opção: Selecionarna barra de instruçãorápida o contato quedeseja-se inserir noprograma. Abriráuma janela próximaao espaço dainstrução e escolhero contato desejado.
2ª opção: Usar ocontato desejadocontido na árvore deinstrução compare.
Janela de seleçãoda 1ª opção
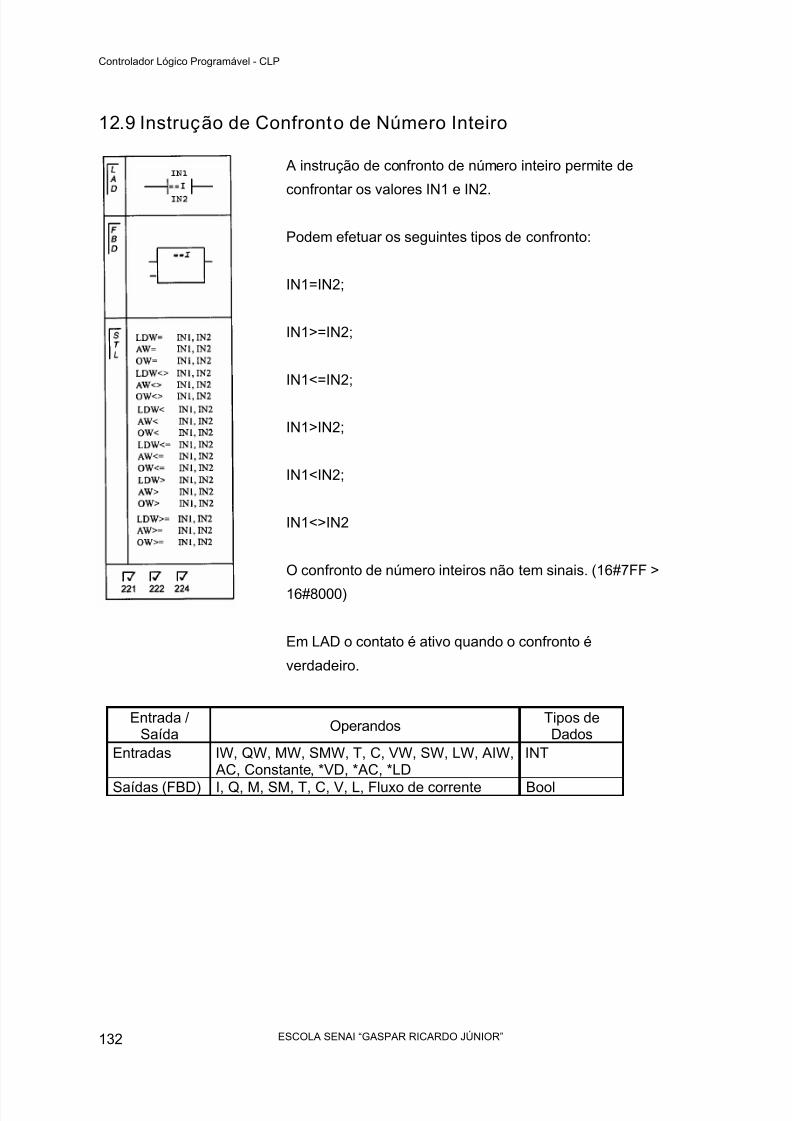
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 132/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 132
12.9 Instrução de Confronto de Número Inteiro
A instrução de confronto de número inteiro permite de
confrontar os valores IN1 e IN2.
Podem efetuar os seguintes tipos de confronto:
IN1=IN2;
IN1>=IN2;
IN1<=IN2;
IN1>IN2;
IN1<IN2;
IN1<>IN2
O confronto de número inteiros não tem sinais. (16#7FF >
16#8000)
Em LAD o contato é ativo quando o confronto é
verdadeiro.
Entrada /Saída
OperandosTipos deDados
Entradas IW, QW, MW, SMW, T, C, VW, SW, LW, AIW, AC, Constante, *VD, *AC, *LD
INT
Saídas (FBD) I, Q, M, SM, T, C, V, L, Fluxo de corrente Bool
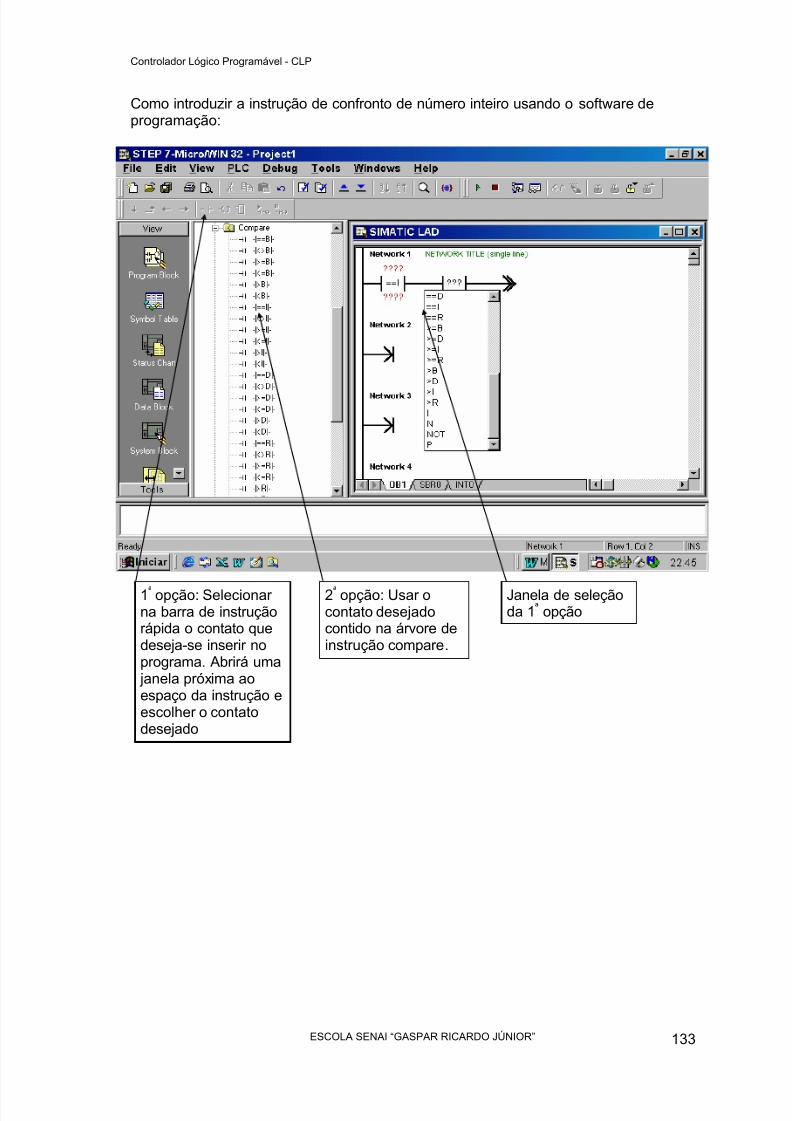
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 133/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 133
Como introduzir a instrução de confronto de número inteiro usando o software deprogramação:
1ª opção: Selecionarna barra de instruçãorápida o contato quedeseja-se inserir noprograma. Abrirá uma janela próxima aoespaço da instrução eescolher o contatodesejado
2ª opção: Usar ocontato desejadocontido na árvore deinstrução compare.
Janela de seleçãoda 1ª opção
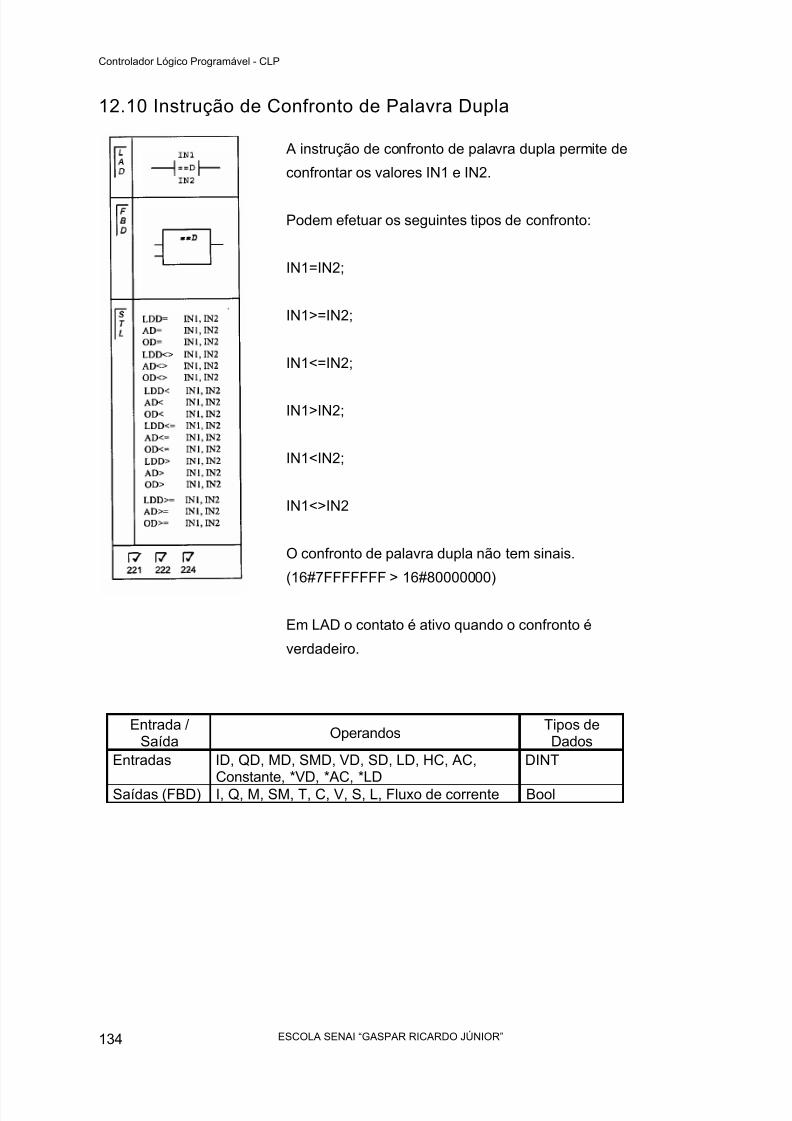
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 134/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 134
12.10 Instrução de Confronto de Palavra Dupla
A instrução de confronto de palavra dupla permite de
confrontar os valores IN1 e IN2.
Podem efetuar os seguintes tipos de confronto:
IN1=IN2;
IN1>=IN2;
IN1<=IN2;
IN1>IN2;
IN1<IN2;
IN1<>IN2
O confronto de palavra dupla não tem sinais.
(16#7FFFFFFF > 16#80000000)
Em LAD o contato é ativo quando o confronto é
verdadeiro.
Entrada /Saída
OperandosTipos deDados
Entradas ID, QD, MD, SMD, VD, SD, LD, HC, AC,Constante, *VD, *AC, *LD
DINT
Saídas (FBD) I, Q, M, SM, T, C, V, S, L, Fluxo de corrente Bool

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 135/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 135
Como introduzir a instrução de confronto de palavra dupla usando o software deprogramação:
1ª opção: Selecionarna barra de instruçãorápida o contato quedeseja-se inserir noprograma. Abriráuma janela próximaao espaço dainstrução e escolhero contato desejado.
2ª opção: Usar ocontato desejadocontido na árvore deinstrução compare.
Janela de seleçãoda 1ª opção.
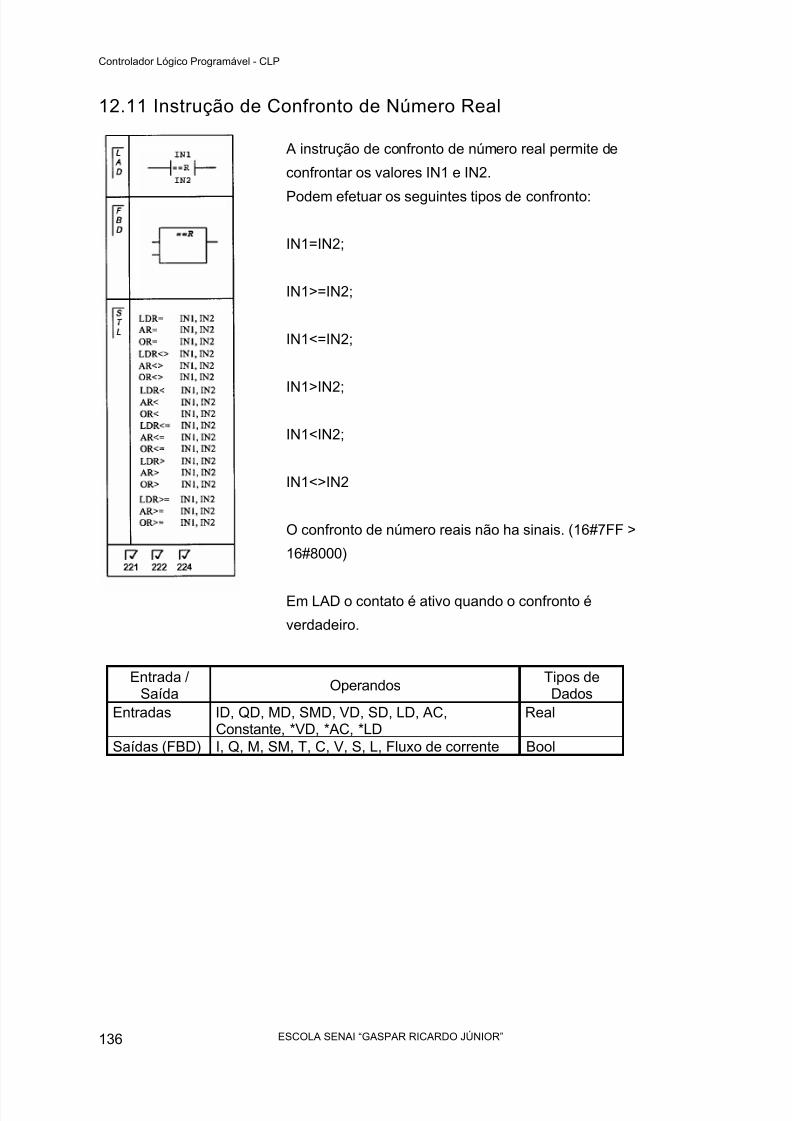
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 136/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 136
12.11 Instrução de Confronto de Número Real
A instrução de confronto de número real permite de
confrontar os valores IN1 e IN2.
Podem efetuar os seguintes tipos de confronto:
IN1=IN2;
IN1>=IN2;
IN1<=IN2;
IN1>IN2;
IN1<IN2;
IN1<>IN2
O confronto de número reais não ha sinais. (16#7FF >
16#8000)
Em LAD o contato é ativo quando o confronto é
verdadeiro.
Entrada /Saída
OperandosTipos deDados
Entradas ID, QD, MD, SMD, VD, SD, LD, AC,Constante, *VD, *AC, *LD
Real
Saídas (FBD) I, Q, M, SM, T, C, V, S, L, Fluxo de corrente Bool
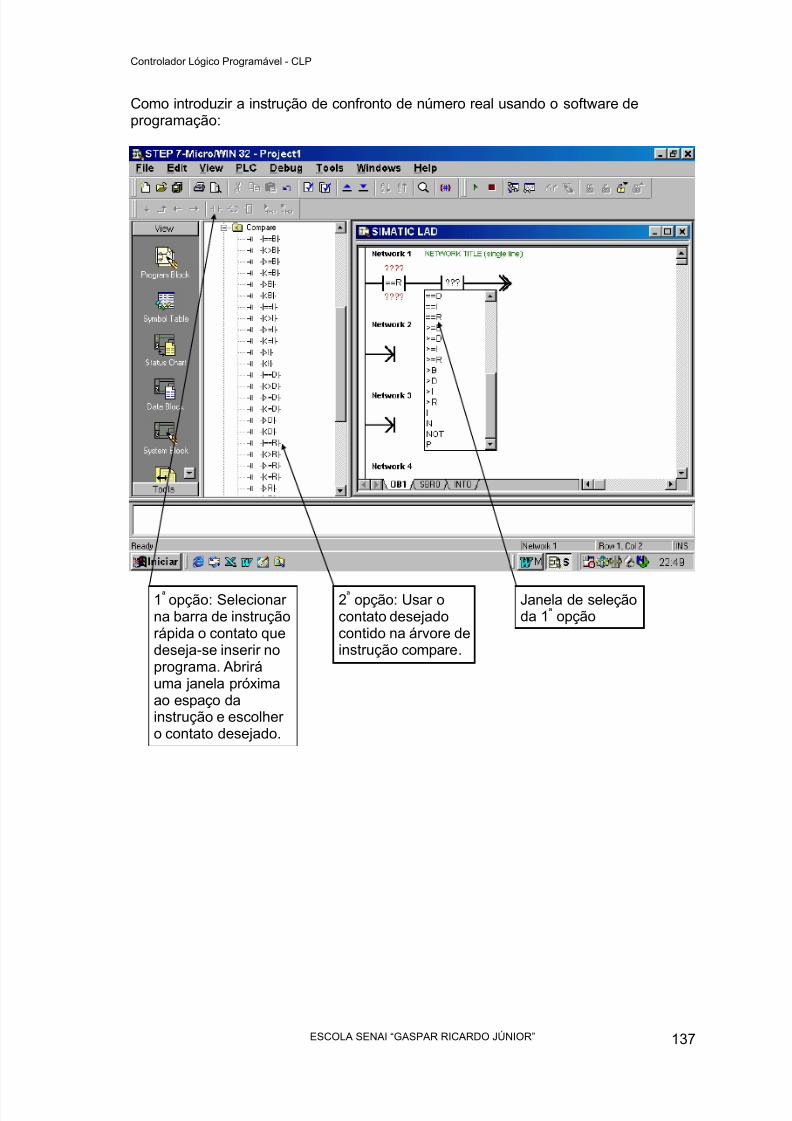
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 137/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 137
Como introduzir a instrução de confronto de número real usando o software deprogramação:
1ª opção: Selecionarna barra de instruçãorápida o contato quedeseja-se inserir noprograma. Abriráuma janela próximaao espaço dainstrução e escolhero contato desejado.
2ª opção: Usar ocontato desejadocontido na árvore deinstrução compare.
Janela de seleçãoda 1ª opção
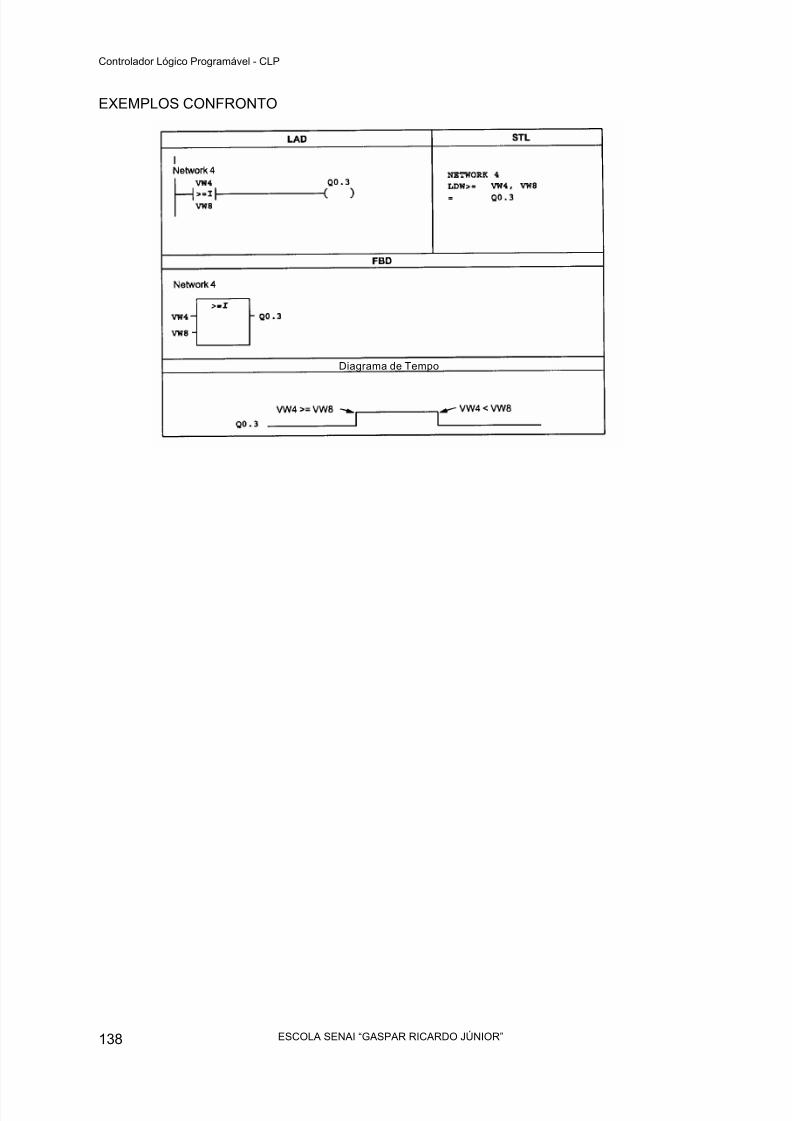
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 138/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 138
EXEMPLOS CONFRONTO
Diagrama de Tempo
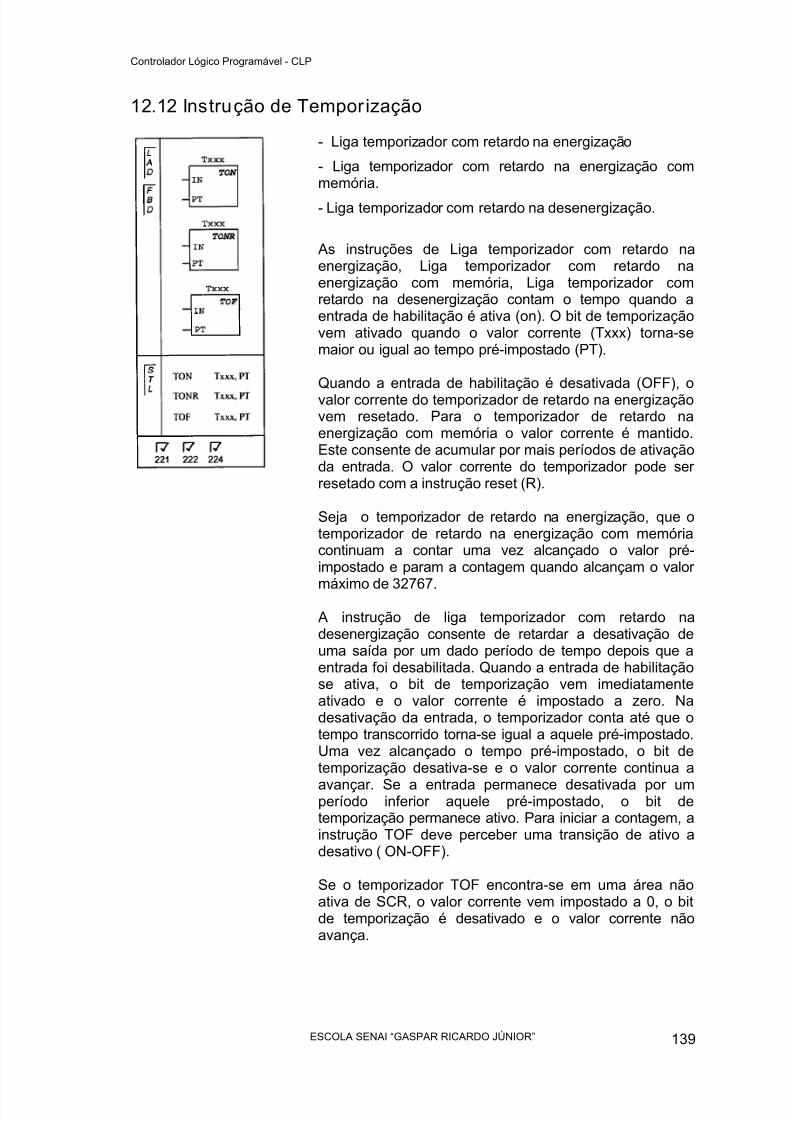
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 139/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 139
12.12 Instrução de Temporização
- Liga temporizador com retardo na energização
- Liga temporizador com retardo na energização commemória.
- Liga temporizador com retardo na desenergização.
As instruções de Liga temporizador com retardo naenergização, Liga temporizador com retardo naenergização com memória, Liga temporizador comretardo na desenergização contam o tempo quando aentrada de habilitação é ativa (on). O bit de temporizaçãovem ativado quando o valor corrente (Txxx) torna-semaior ou igual ao tempo pré-impostado (PT).
Quando a entrada de habilitação é desativada (OFF), ovalor corrente do temporizador de retardo na energizaçãovem resetado. Para o temporizador de retardo naenergização com memória o valor corrente é mantido.Este consente de acumular por mais períodos de ativaçãoda entrada. O valor corrente do temporizador pode serresetado com a instrução reset (R).
Seja o temporizador de retardo na energização, que otemporizador de retardo na energização com memóriacontinuam a contar uma vez alcançado o valor pré-impostado e param a contagem quando alcançam o valor
máximo de 32767. A instrução de liga temporizador com retardo nadesenergização consente de retardar a desativação deuma saída por um dado período de tempo depois que aentrada foi desabilitada. Quando a entrada de habilitaçãose ativa, o bit de temporização vem imediatamenteativado e o valor corrente é impostado a zero. Nadesativação da entrada, o temporizador conta até que otempo transcorrido torna-se igual a aquele pré-impostado.Uma vez alcançado o tempo pré-impostado, o bit detemporização desativa-se e o valor corrente continua a
avançar. Se a entrada permanece desativada por umperíodo inferior aquele pré-impostado, o bit detemporização permanece ativo. Para iniciar a contagem, ainstrução TOF deve perceber uma transição de ativo adesativo ( ON-OFF).
Se o temporizador TOF encontra-se em uma área nãoativa de SCR, o valor corrente vem impostado a 0, o bitde temporização é desativado e o valor corrente nãoavança.
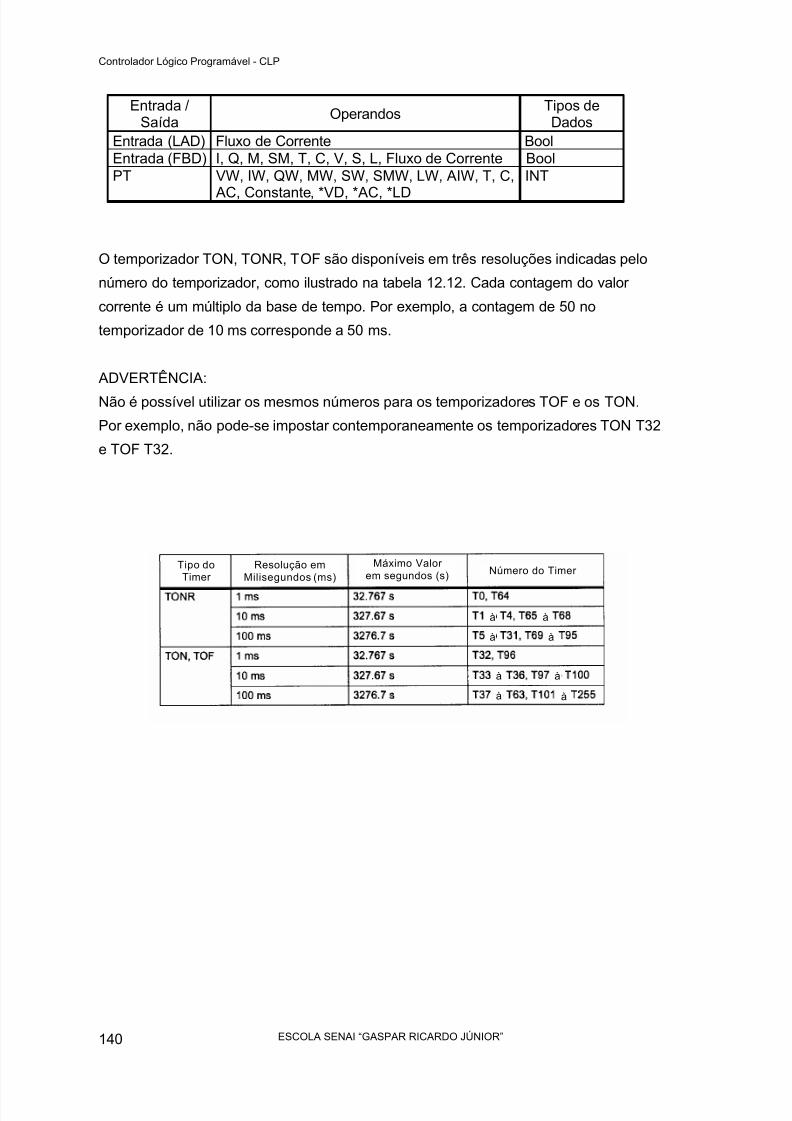
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 140/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 140
Entrada /Saída
OperandosTipos deDados
Entrada (LAD) Fluxo de Corrente BoolEntrada (FBD) I, Q, M, SM, T, C, V, S, L, Fluxo de Corrente BoolPT VW, IW, QW, MW, SW, SMW, LW, AIW, T, C,
AC, Constante, *VD, *AC, *LD
INT
O temporizador TON, TONR, TOF são disponíveis em três resoluções indicadas pelo
número do temporizador, como ilustrado na tabela 12.12. Cada contagem do valor
corrente é um múltiplo da base de tempo. Por exemplo, a contagem de 50 no
temporizador de 10 ms corresponde a 50 ms.
ADVERTÊNCIA:
Não é possível utilizar os mesmos números para os temporizadores TOF e os TON.
Por exemplo, não pode-se impostar contemporaneamente os temporizadores TON T32
e TOF T32.
Tabela 12.12 – Resolução dos temporizadores
Tipo doTimer
Resolução emMilisegundos (ms)
Máximo Valorem segundos (s) Número do Timer
à à
à à
à à
à à
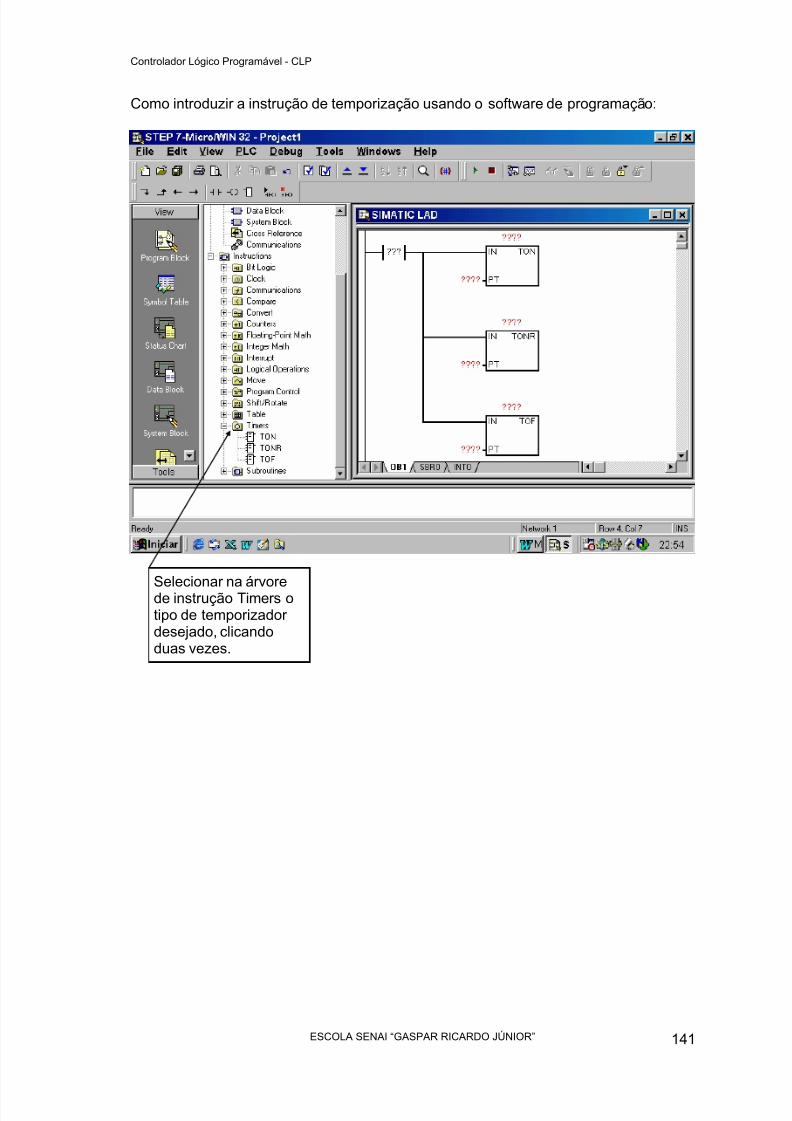
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 141/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 141
Como introduzir a instrução de temporização usando o software de programação:
Selecionar na árvorede instrução Timers otipo de temporizadordesejado, clicandoduas vezes.
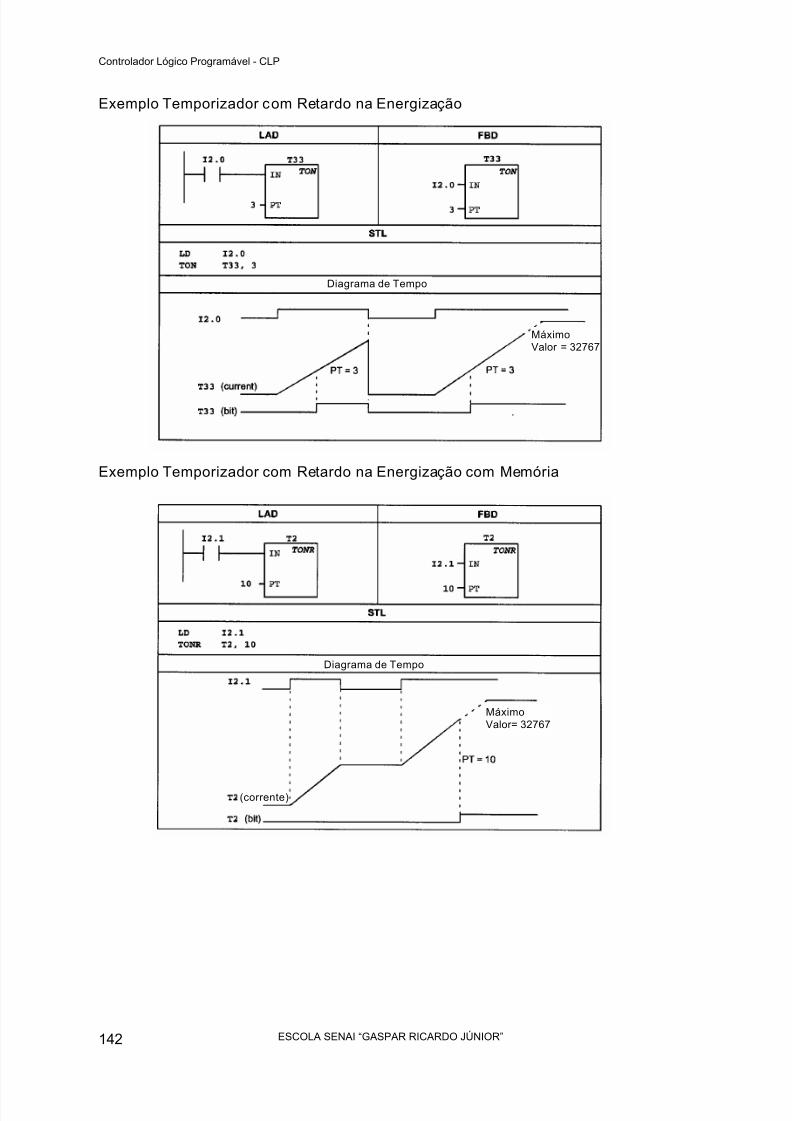
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 142/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 142
Exemplo Temporizador com Retardo na Energização
Exemplo Temporizador com Retardo na Energização com Memória
Diagrama de Tempo
MáximoValor = 32767
Diagrama de Tempo
MáximoValor= 32767
(corrente)
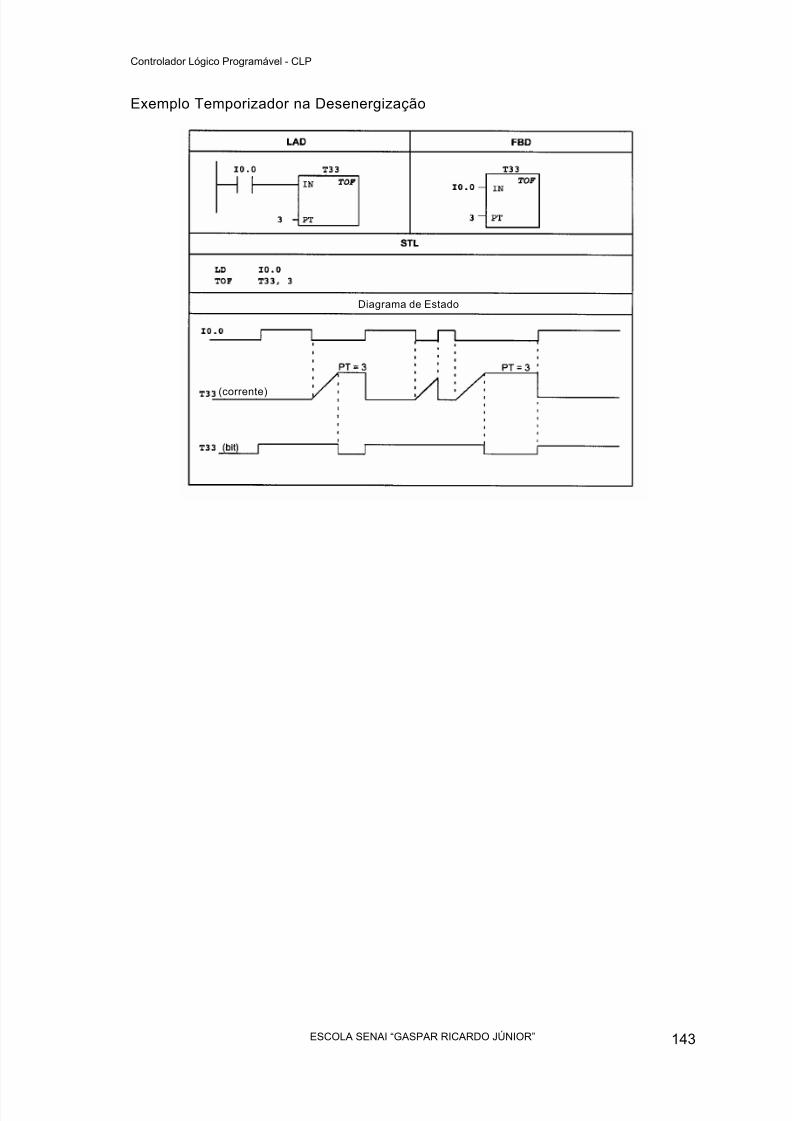
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 143/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 143
Exemplo Temporizador na Desenergização
Diagrama de Estado
(corrente)
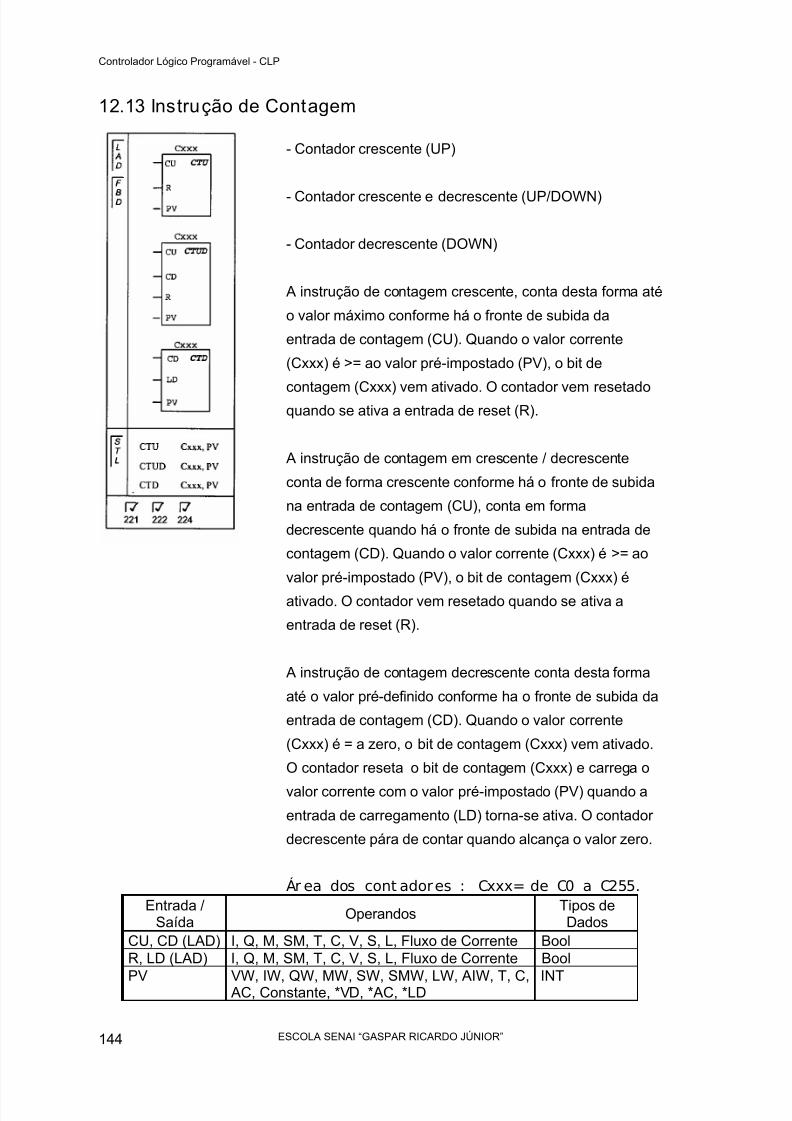
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 144/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 144
12.13 Instrução de Contagem
- Contador crescente (UP)
- Contador crescente e decrescente (UP/DOWN)
- Contador decrescente (DOWN)
A instrução de contagem crescente, conta desta forma até
o valor máximo conforme há o fronte de subida da
entrada de contagem (CU). Quando o valor corrente
(Cxxx) é >= ao valor pré-impostado (PV), o bit de
contagem (Cxxx) vem ativado. O contador vem resetadoquando se ativa a entrada de reset (R).
A instrução de contagem em crescente / decrescente
conta de forma crescente conforme há o fronte de subida
na entrada de contagem (CU), conta em forma
decrescente quando há o fronte de subida na entrada de
contagem (CD). Quando o valor corrente (Cxxx) é >= ao
valor pré-impostado (PV), o bit de contagem (Cxxx) é
ativado. O contador vem resetado quando se ativa a
entrada de reset (R).
A instrução de contagem decrescente conta desta forma
até o valor pré-definido conforme ha o fronte de subida da
entrada de contagem (CD). Quando o valor corrente
(Cxxx) é = a zero, o bit de contagem (Cxxx) vem ativado.
O contador reseta o bit de contagem (Cxxx) e carrega o
valor corrente com o valor pré-impostado (PV) quando a
entrada de carregamento (LD) torna-se ativa. O contador
decrescente pára de contar quando alcança o valor zero.
Ár ea dos cont adores : Cxxx= de C0 a C255.
Entrada /Saída
OperandosTipos deDados
CU, CD (LAD) I, Q, M, SM, T, C, V, S, L, Fluxo de Corrente BoolR, LD (LAD) I, Q, M, SM, T, C, V, S, L, Fluxo de Corrente Bool
PV VW, IW, QW, MW, SW, SMW, LW, AIW, T, C, AC, Constante, *VD, *AC, *LD INT
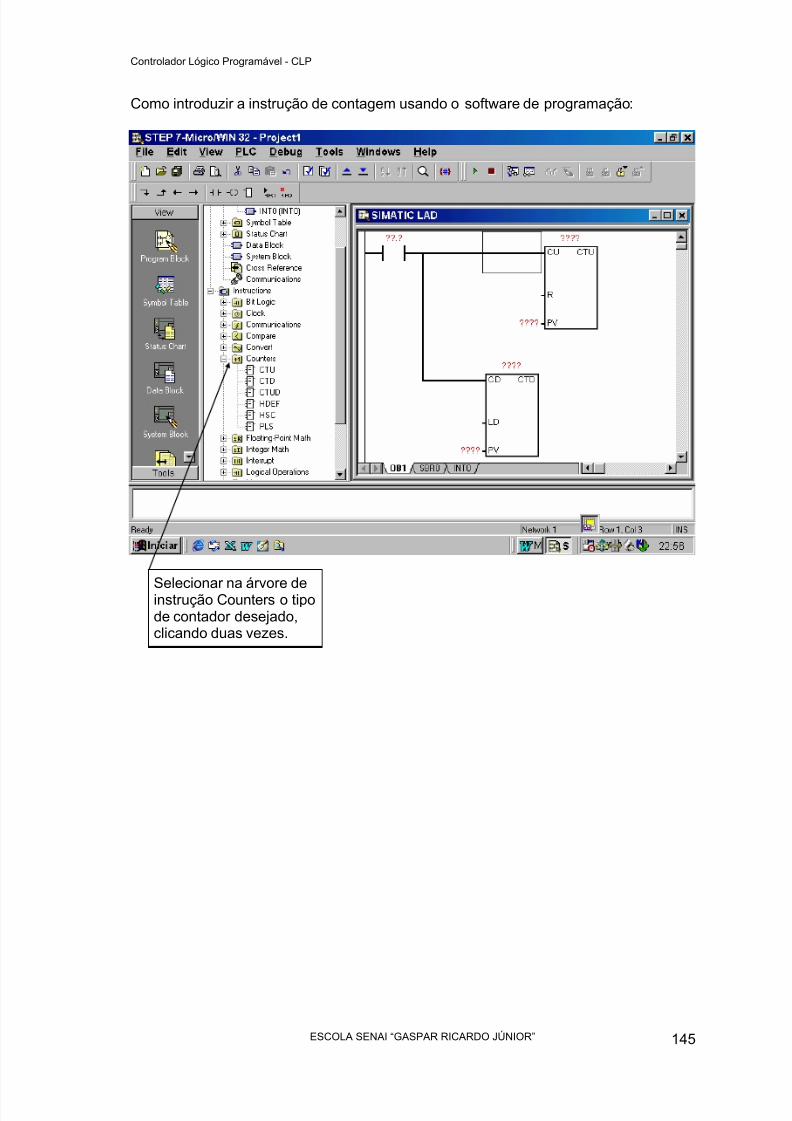
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 145/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 145
Como introduzir a instrução de contagem usando o software de programação:
Selecionar na árvore deinstrução Counters o tipode contador desejado,clicando duas vezes.
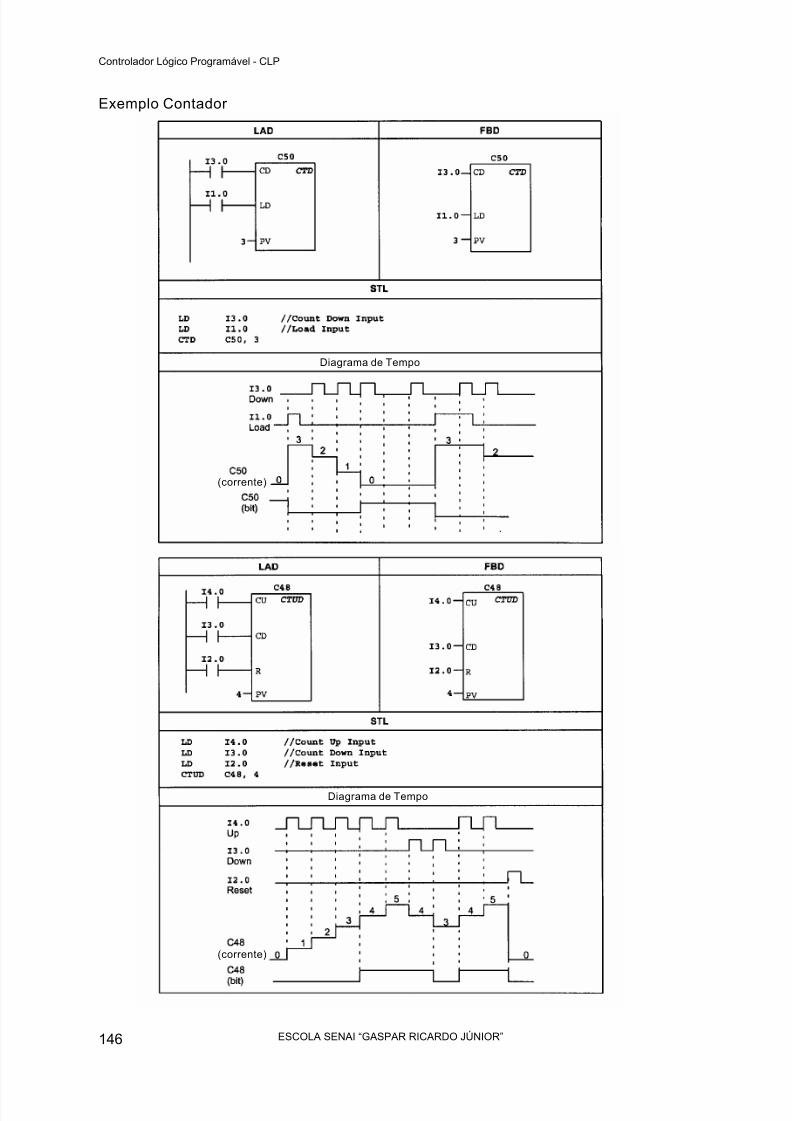
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 146/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 146
Exemplo Contador
Diagrama de Tempo
(corrente)
Diagrama de Tempo
(corrente)
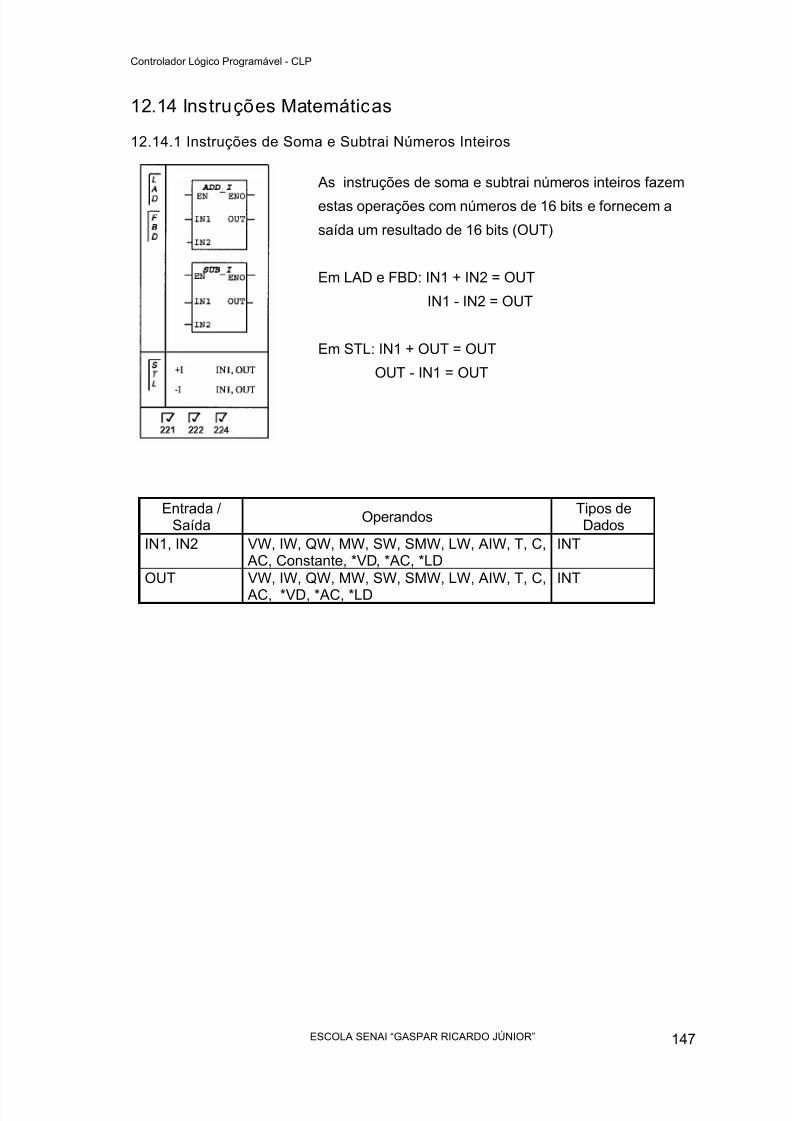
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 147/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 147
12.14 Instruções Matemáticas
12.14.1 Instruções de Soma e Subtrai Números Inteiros
As instruções de soma e subtrai números inteiros fazem
estas operações com números de 16 bits e fornecem a
saída um resultado de 16 bits (OUT)
Em LAD e FBD: IN1 + IN2 = OUT
IN1 - IN2 = OUT
Em STL: IN1 + OUT = OUT
OUT - IN1 = OUT
Entrada /Saída
OperandosTipos deDados
IN1, IN2 VW, IW, QW, MW, SW, SMW, LW, AIW, T, C, AC, Constante, *VD, *AC, *LD
INT
OUT VW, IW, QW, MW, SW, SMW, LW, AIW, T, C, AC, *VD, *AC, *LD
INT
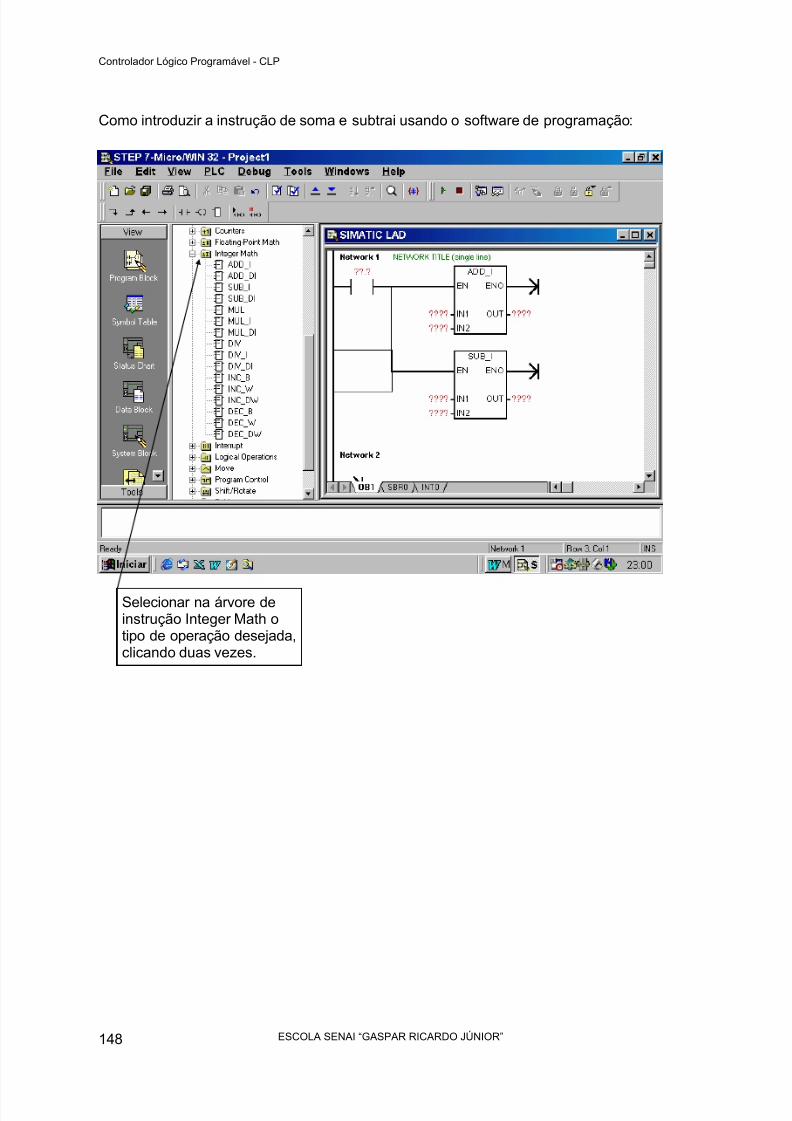
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 148/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 148
Como introduzir a instrução de soma e subtrai usando o software de programação:
Selecionar na árvore deinstrução Integer Math otipo de operação desejada,clicando duas vezes.
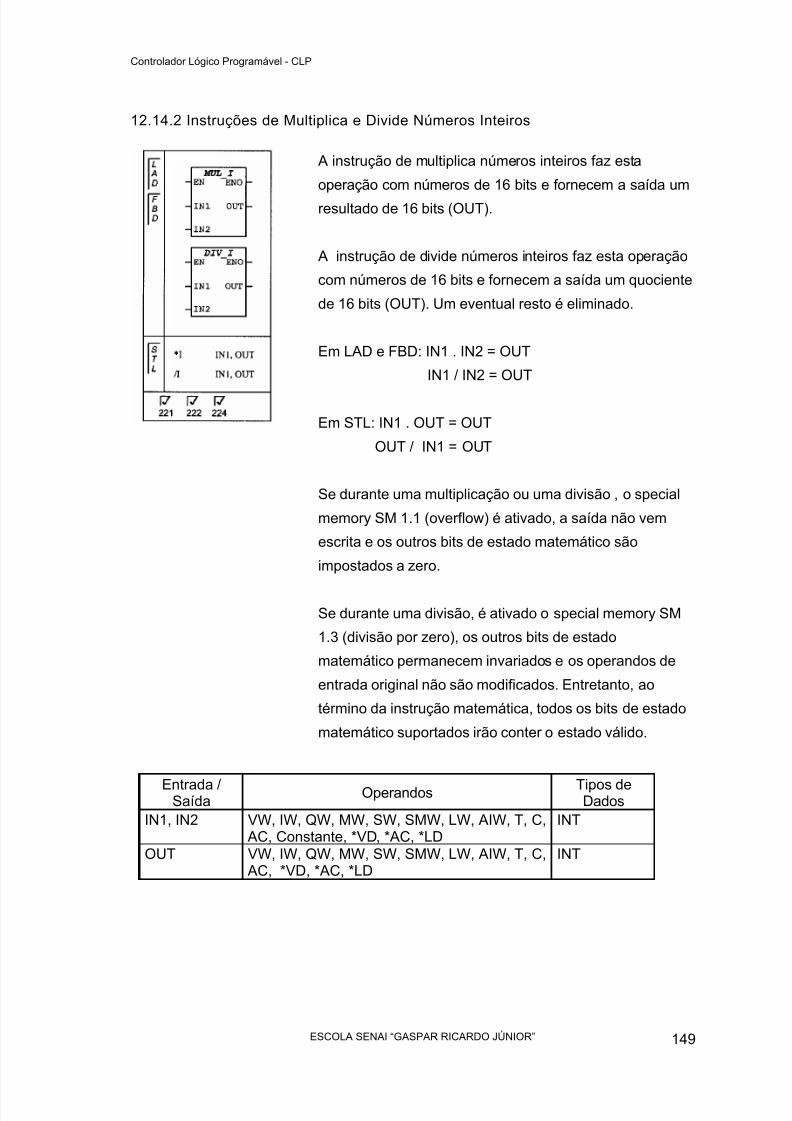
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 149/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 149
12.14.2 Instruções de Multiplica e Divide Números Inteiros
A instrução de multiplica números inteiros faz esta
operação com números de 16 bits e fornecem a saída um
resultado de 16 bits (OUT).
A instrução de divide números inteiros faz esta operação
com números de 16 bits e fornecem a saída um quociente
de 16 bits (OUT). Um eventual resto é eliminado.
Em LAD e FBD: IN1 . IN2 = OUT
IN1 / IN2 = OUT
Em STL: IN1 . OUT = OUT
OUT / IN1 = OUT
Se durante uma multiplicação ou uma divisão , o special
memory SM 1.1 (overflow) é ativado, a saída não vem
escrita e os outros bits de estado matemático são
impostados a zero.
Se durante uma divisão, é ativado o special memory SM
1.3 (divisão por zero), os outros bits de estado
matemático permanecem invariados e os operandos de
entrada original não são modificados. Entretanto, ao
término da instrução matemática, todos os bits de estado
matemático suportados irão conter o estado válido.
Entrada /Saída Operandos Tipos deDadosIN1, IN2 VW, IW, QW, MW, SW, SMW, LW, AIW, T, C,
AC, Constante, *VD, *AC, *LDINT
OUT VW, IW, QW, MW, SW, SMW, LW, AIW, T, C, AC, *VD, *AC, *LD
INT
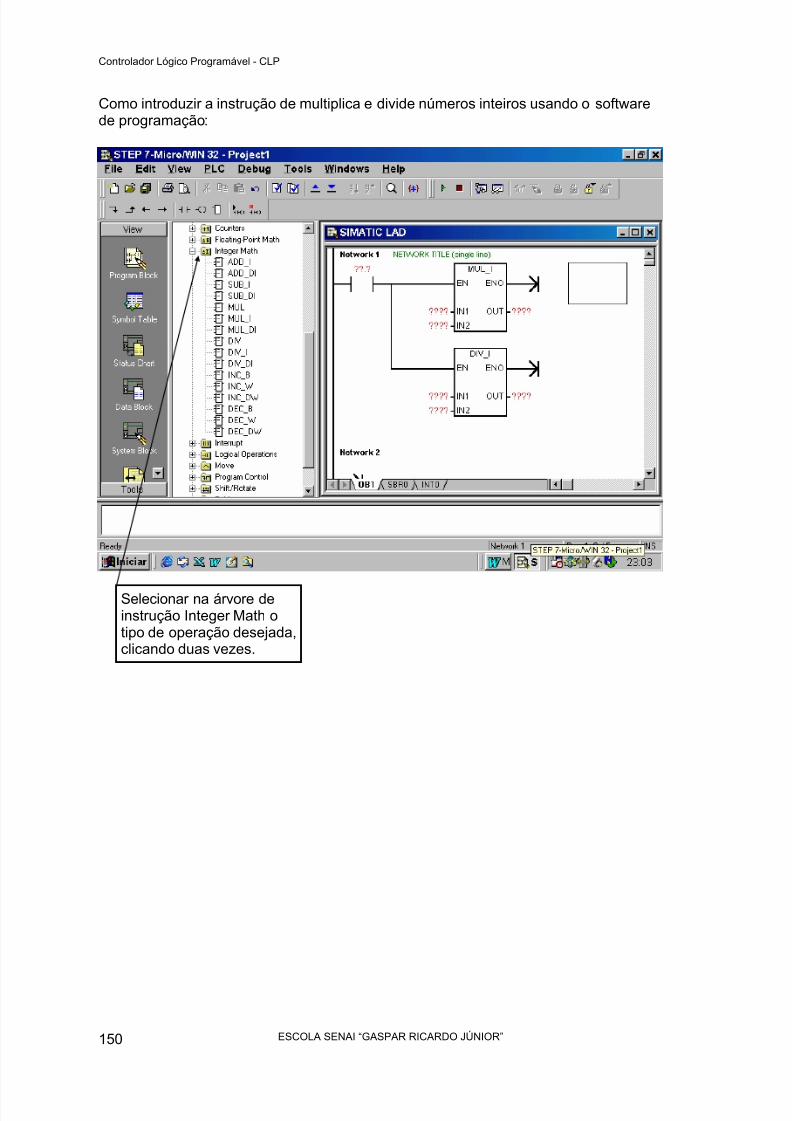
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 150/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 150
Como introduzir a instrução de multiplica e divide números inteiros usando o software de programação:
Selecionar na árvore deinstrução Integer Math otipo de operação desejada,clicando duas vezes.
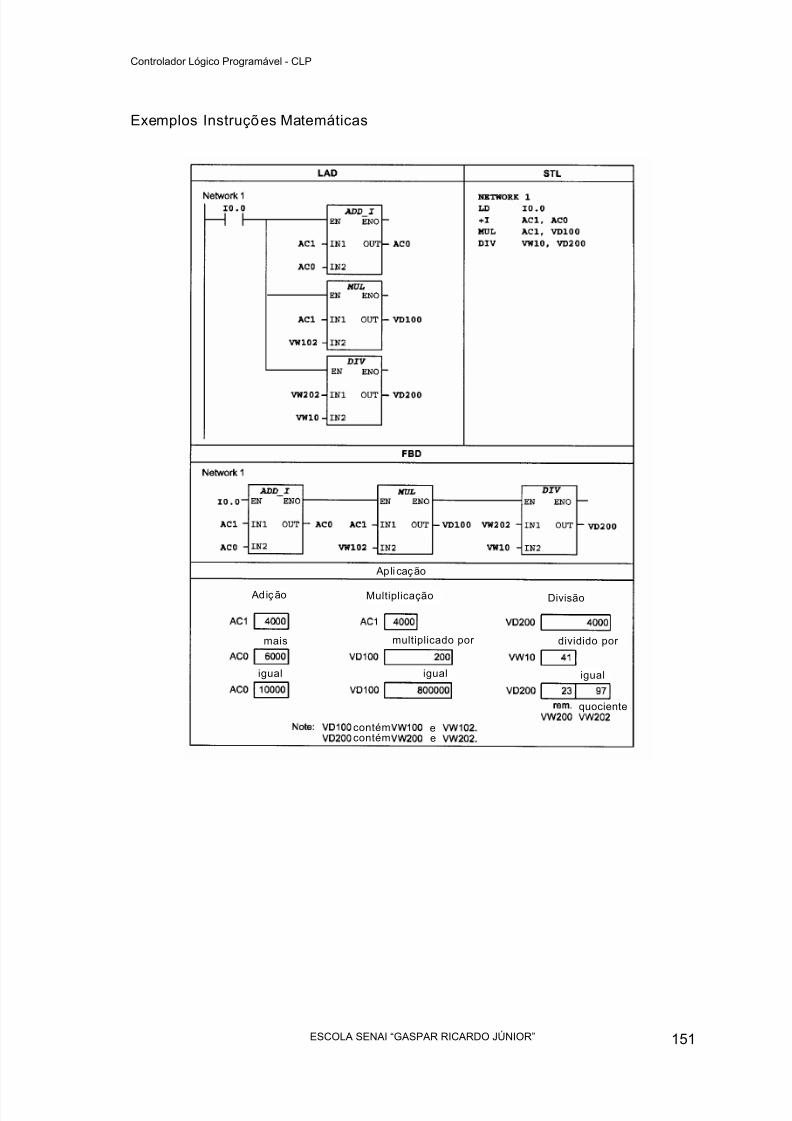
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 151/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 151
Exemplos Instruções Matemáticas
Apli cação
Adição Multiplicação Divisão
mais
igual
multiplicado por dividido por
quociente
contém
igualigual
econtém e
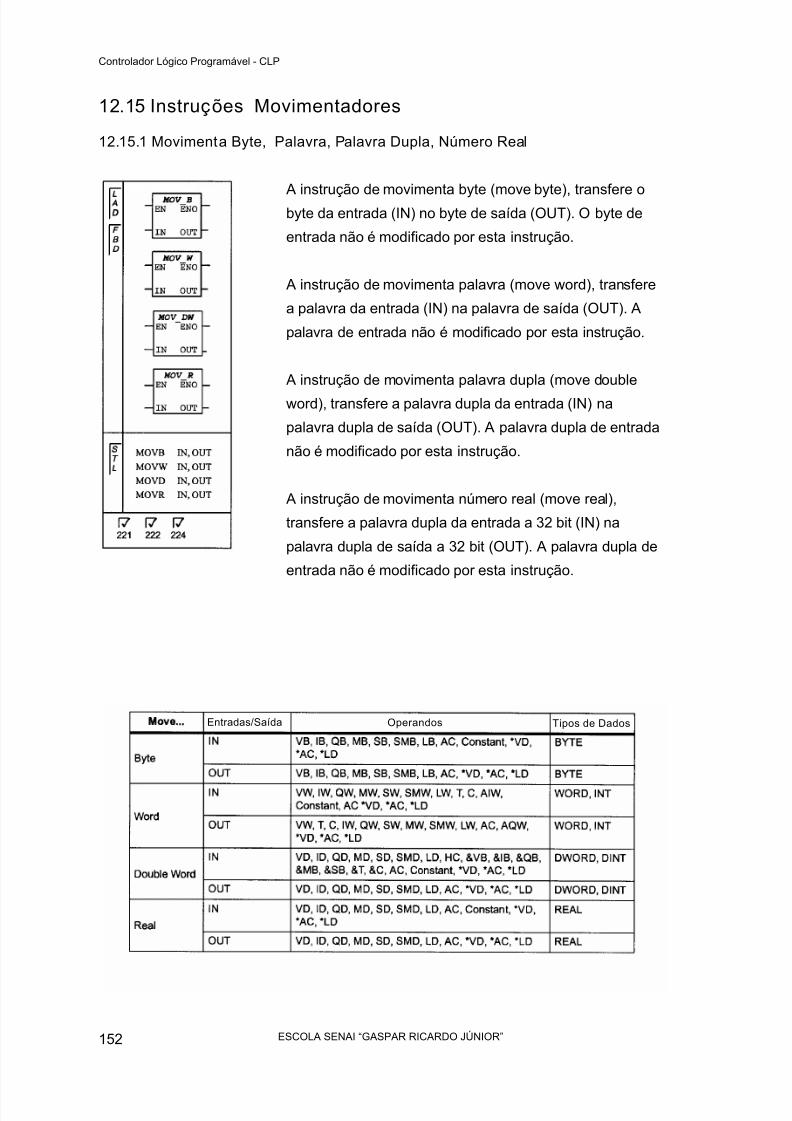
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 152/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 152
Entradas/Saída Operandos Tipos de Dados
12.15 Instruções Movimentadores
12.15.1 Movimenta Byte, Palavra, Palavra Dupla, Número Real
A instrução de movimenta byte (move byte), transfere obyte da entrada (IN) no byte de saída (OUT). O byte de
entrada não é modificado por esta instrução.
A instrução de movimenta palavra (move word), transfere
a palavra da entrada (IN) na palavra de saída (OUT). A
palavra de entrada não é modificado por esta instrução.
A instrução de movimenta palavra dupla (move double
word), transfere a palavra dupla da entrada (IN) na
palavra dupla de saída (OUT). A palavra dupla de entrada
não é modificado por esta instrução.
A instrução de movimenta número real (move real),
transfere a palavra dupla da entrada a 32 bit (IN) na
palavra dupla de saída a 32 bit (OUT). A palavra dupla de
entrada não é modificado por esta instrução.
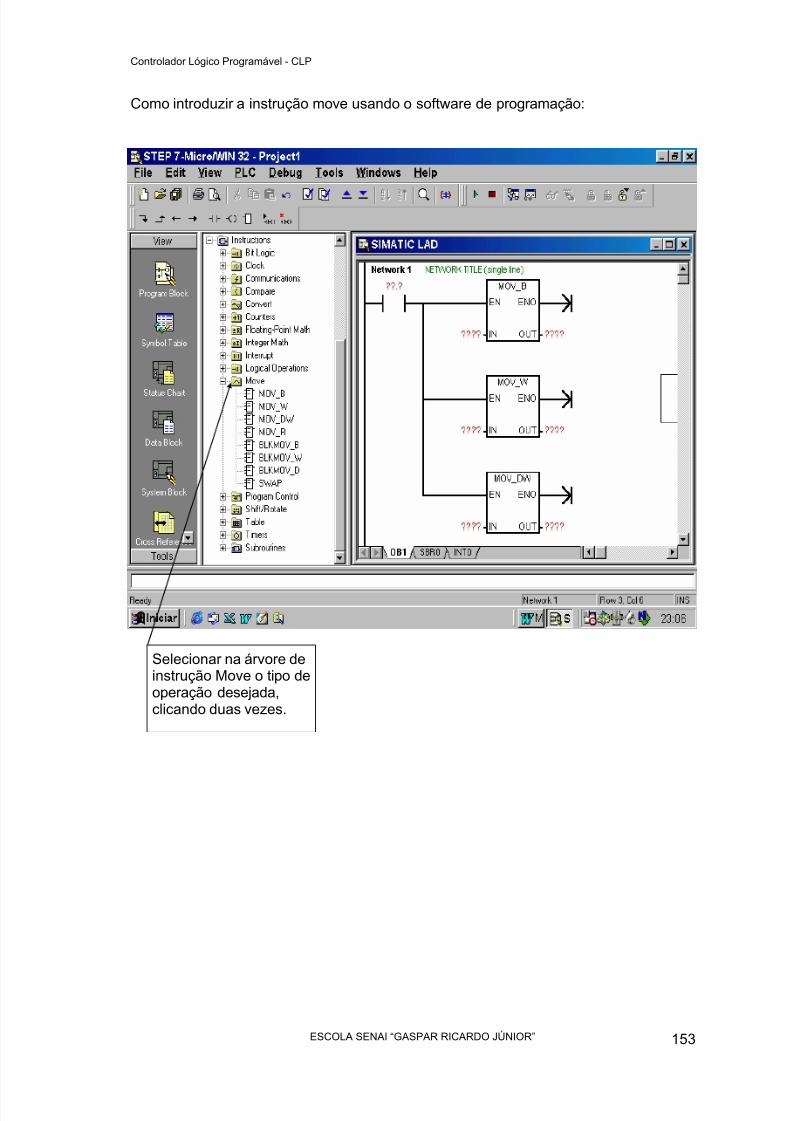
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 153/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 153
Como introduzir a instrução move usando o software de programação:
Selecionar na árvore deinstrução Move o tipo deoperação desejada,clicando duas vezes.

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 154/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 154
Exemplo Movimentadores
Apli cação
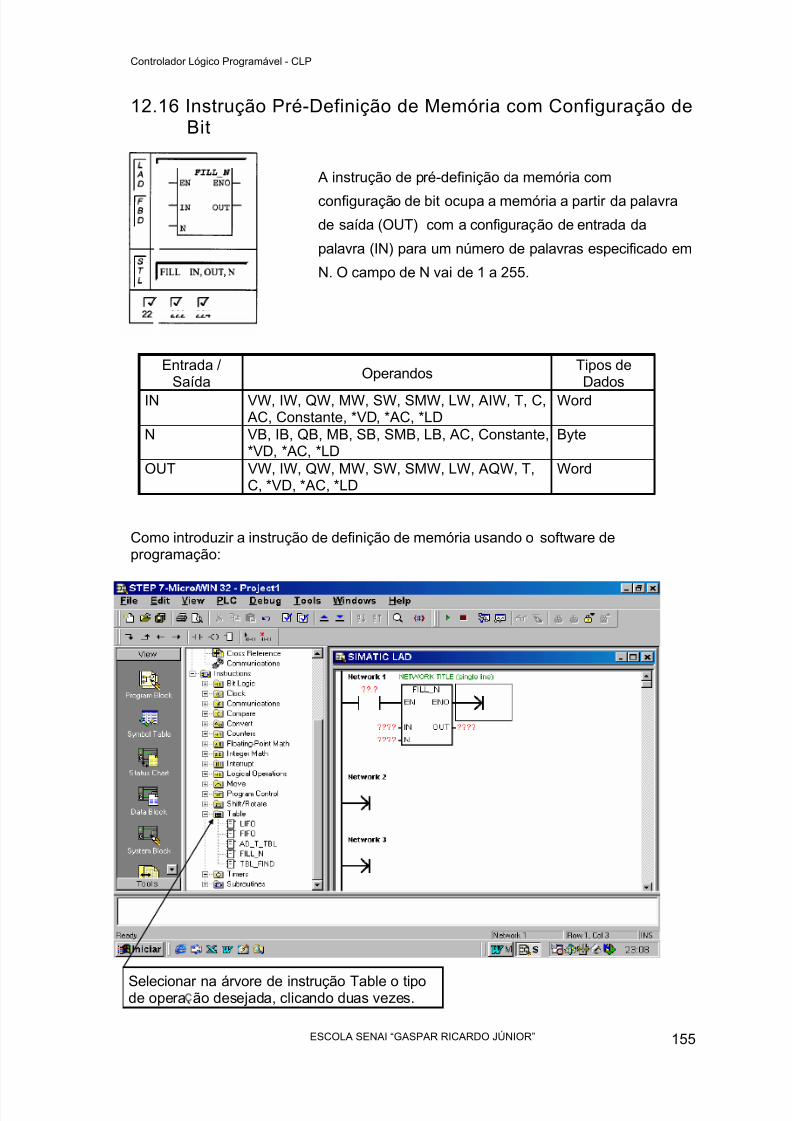
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 155/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 155
12.16 Instrução Pré-Definição de Memória com Configuração deBit
A instrução de pré-definição da memória com
configuração de bit ocupa a memória a partir da palavrade saída (OUT) com a configuração de entrada da
palavra (IN) para um número de palavras especificado em
N. O campo de N vai de 1 a 255.
Entrada /Saída
OperandosTipos deDados
IN VW, IW, QW, MW, SW, SMW, LW, AIW, T, C, AC, Constante, *VD, *AC, *LD
Word
N VB, IB, QB, MB, SB, SMB, LB, AC, Constante,*VD, *AC, *LD
Byte
OUT VW, IW, QW, MW, SW, SMW, LW, AQW, T,C, *VD, *AC, *LD
Word
Como introduzir a instrução de definição de memória usando o software deprogramação:
EXEMPLO PRÉ-DEFINIÇÃO DE MEMÓRIA
Selecionar na árvore de instrução Table o tipode opera ão desejada, clicando duas vezes.
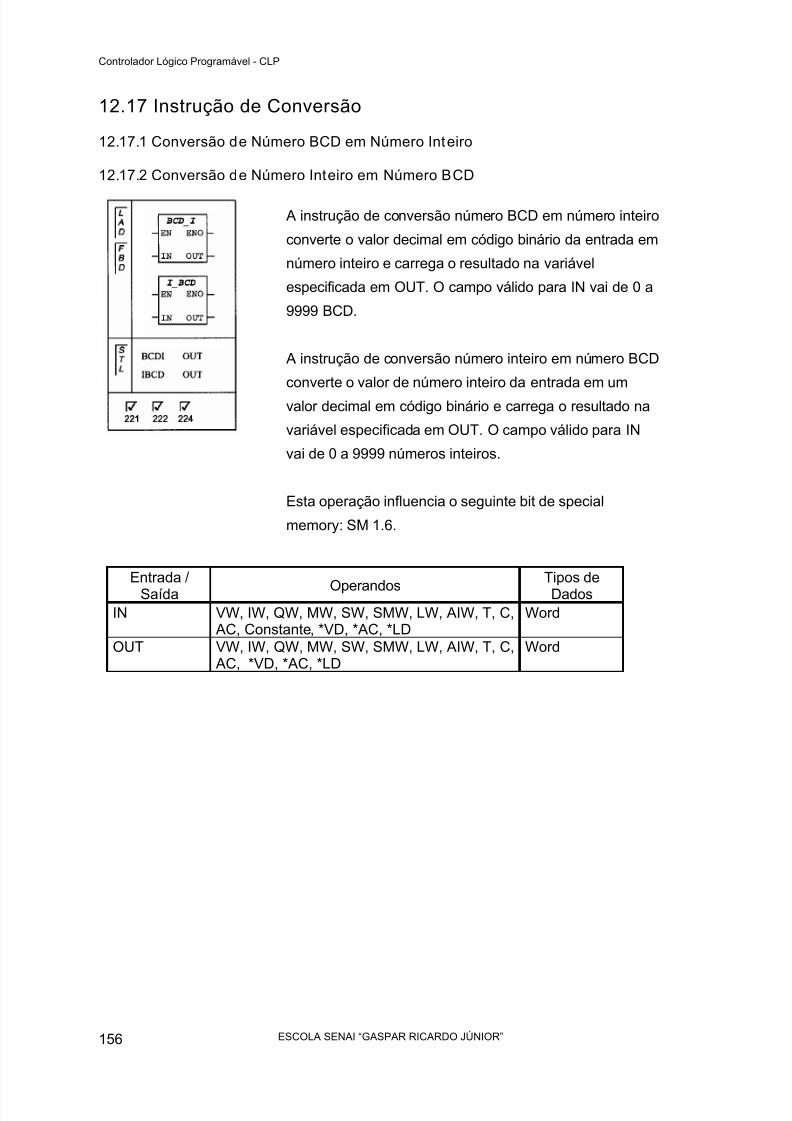
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 156/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 156
12.17 Instrução de Conversão
12.17.1 Conversão de Número BCD em Número Inteiro
12.17.2 Conversão de Número Inteiro em Número BCD
A instrução de conversão número BCD em número inteiro
converte o valor decimal em código binário da entrada em
número inteiro e carrega o resultado na variável
especificada em OUT. O campo válido para IN vai de 0 a
9999 BCD.
A instrução de conversão número inteiro em número BCD
converte o valor de número inteiro da entrada em um
valor decimal em código binário e carrega o resultado na
variável especificada em OUT. O campo válido para IN
vai de 0 a 9999 números inteiros.
Esta operação influencia o seguinte bit de special
memory: SM 1.6.
Entrada /Saída Operandos
Tipos deDados
IN VW, IW, QW, MW, SW, SMW, LW, AIW, T, C, AC, Constante, *VD, *AC, *LD
Word
OUT VW, IW, QW, MW, SW, SMW, LW, AIW, T, C, AC, *VD, *AC, *LD
Word
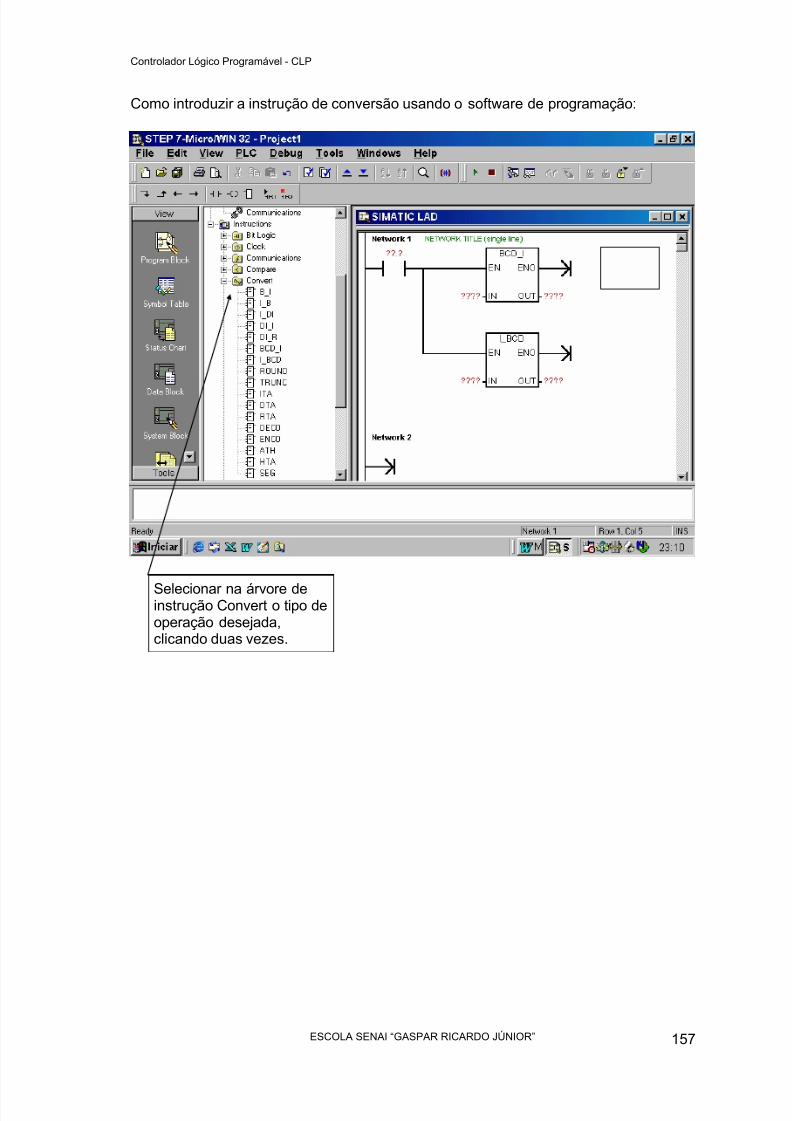
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 157/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 157
Como introduzir a instrução de conversão usando o software de programação:
Selecionar na árvore deinstrução Convert o tipo deoperação desejada,clicando duas vezes.
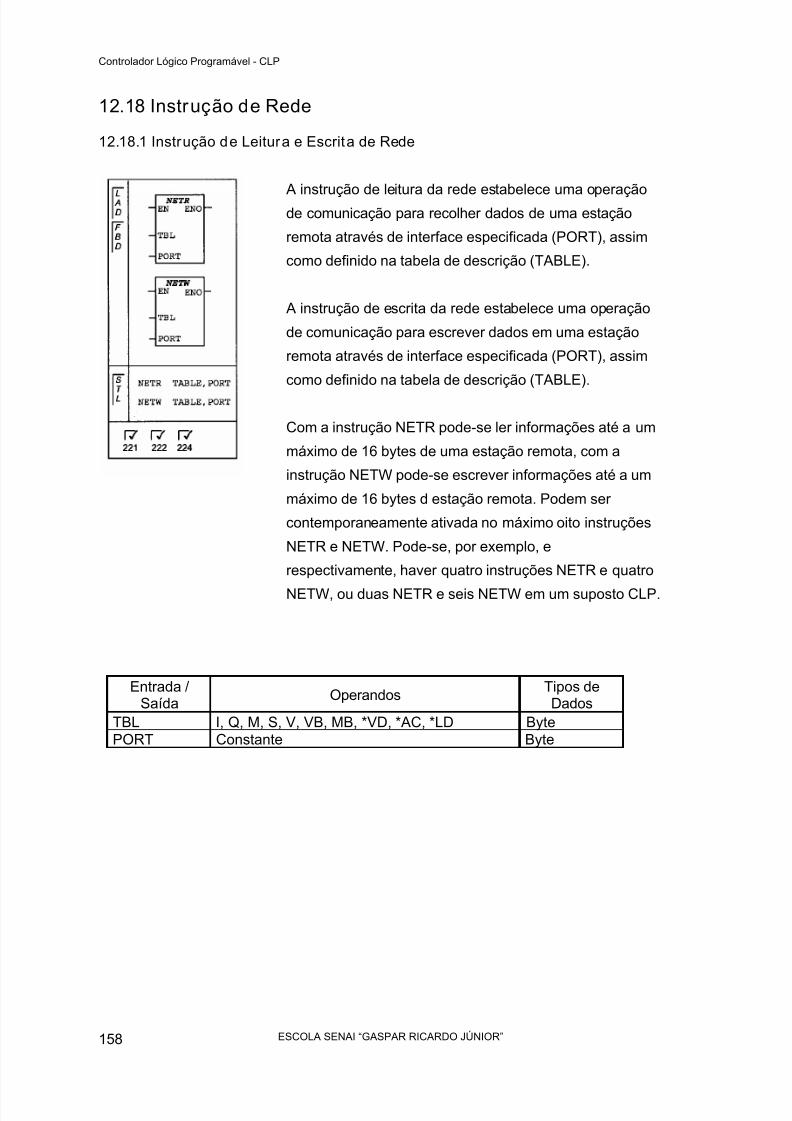
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 158/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 158
12.18 Instrução de Rede
12.18.1 Instrução de Leitura e Escrita de Rede
A instrução de leitura da rede estabelece uma operaçãode comunicação para recolher dados de uma estação
remota através de interface especificada (PORT), assim
como definido na tabela de descrição (TABLE).
A instrução de escrita da rede estabelece uma operação
de comunicação para escrever dados em uma estação
remota através de interface especificada (PORT), assim
como definido na tabela de descrição (TABLE).
Com a instrução NETR pode-se ler informações até a um
máximo de 16 bytes de uma estação remota, com a
instrução NETW pode-se escrever informações até a um
máximo de 16 bytes d estação remota. Podem ser
contemporaneamente ativada no máximo oito instruções
NETR e NETW. Pode-se, por exemplo, e
respectivamente, haver quatro instruções NETR e quatro
NETW, ou duas NETR e seis NETW em um suposto CLP.
Entrada /Saída
OperandosTipos deDados
TBL I, Q, M, S, V, VB, MB, *VD, *AC, *LD BytePORT Constante Byte
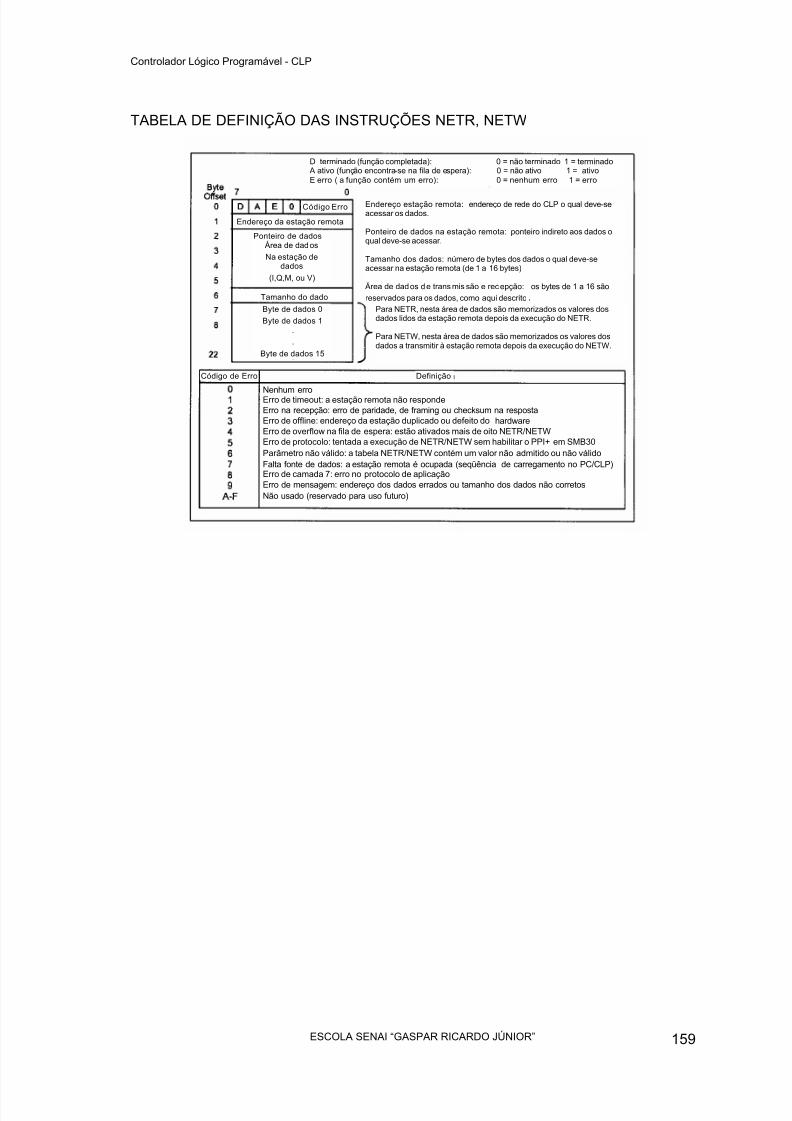
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 159/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 159
TABELA DE DEFINIÇÃO DAS INSTRUÇÕES NETR, NETW
D terminado (função completada): 0 = não terminado 1 = terminado A ativo (função encontra-se na fila de espera): 0 = não ativo 1 = ativoE erro ( a função contém um erro): 0 = nenhum erro 1 = erro
Endereço estação remota: endereço de rede do CLP o qual deve-seacessar os dados.
Ponteiro de dados na estação remota: ponteiro indireto aos dados oqual deve-se acessar.
Tamanho dos dados: número de bytes dos dados o qual deve-seacessar na estação remota (de 1 a 16 bytes)
Área de dad os d e trans mis são e recepção: os bytes de 1 a 16 são
reservados para os dados, como aqui descrito.Para NETR, nesta área de dados são memorizados os valores dosdados lidos da estação remota depois da execução do NETR.
Para NETW, nesta área de dados são memorizados os valores dosdados a transmitir à estação remota depois da execução do NETW.
Nenhum erroErro de timeout: a estação remota não respondeErro na recepção: erro de paridade, de framing ou checksum na respostaErro de offline: endereço da estação duplicado ou defeito do hardware Erro de overflow na fila de espera: estão ativados mais de oito NETR/NETWErro de protocolo: tentada a execução de NETR/NETW sem habilitar o PPI+ em SMB30Parâmetro não válido: a tabela NETR/NETW contém um valor não admitido ou não válidoFalta fonte de dados: a estação remota é ocupada (seqüência de carregamento no PC/CLP)Erro de camada 7: erro no protocolo de aplicaçãoErro de mensagem: endereço dos dados errados ou tamanho dos dados não corretosNão usado (reservado para uso futuro)
DefiniçãoCódigo de Erro
Código Erro
Endereço da estação remota
Ponteiro de dados Área de dad os
Na estação dedados
(I,Q,M, ou V)
Tamanho do dado
Byte de dados 0
Byte de dados 1.
.
Byte de dados 15
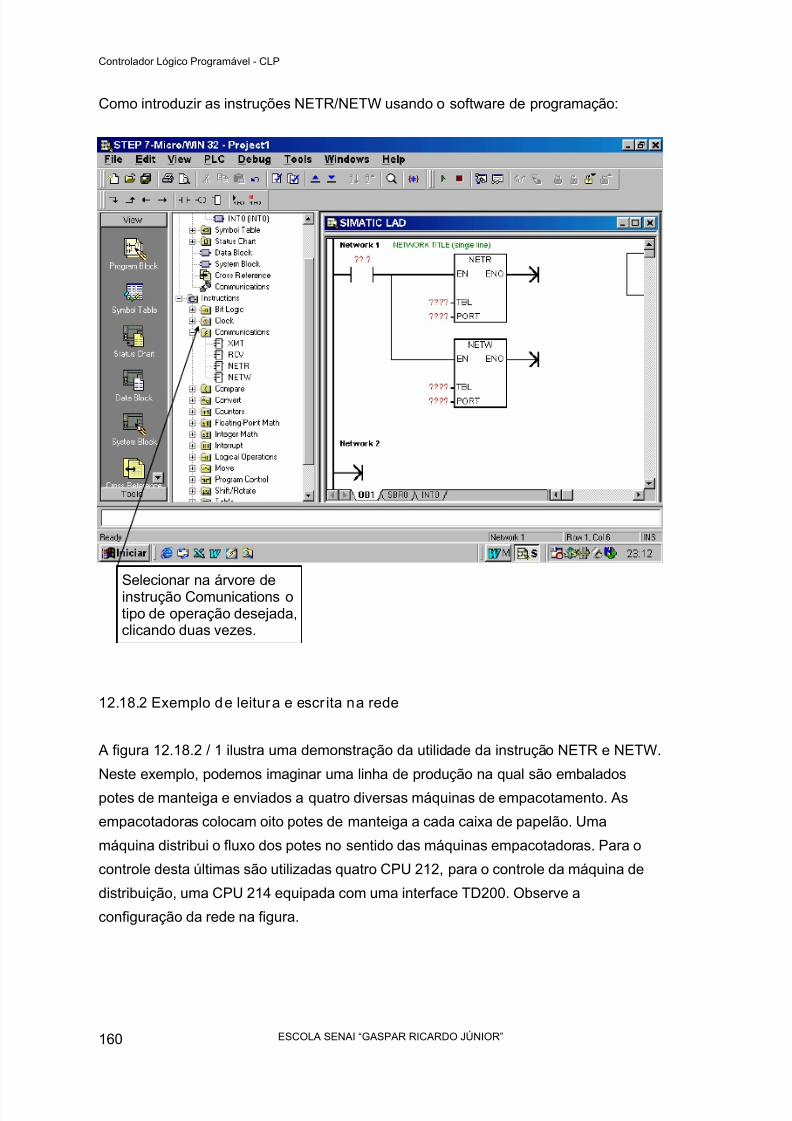
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 160/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 160
Como introduzir as instruções NETR/NETW usando o software de programação:
12.18.2 Exemplo de leitura e escr ita na rede
A figura 12.18.2 / 1 ilustra uma demonstração da utilidade da instrução NETR e NETW.
Neste exemplo, podemos imaginar uma linha de produção na qual são embalados
potes de manteiga e enviados a quatro diversas máquinas de empacotamento. As
empacotadoras colocam oito potes de manteiga a cada caixa de papelão. Uma
máquina distribui o fluxo dos potes no sentido das máquinas empacotadoras. Para o
controle desta últimas são utilizadas quatro CPU 212, para o controle da máquina de
distribuição, uma CPU 214 equipada com uma interface TD200. Observe a
configuração da rede na figura.
Selecionar na árvore deinstrução Comunications otipo de operação desejada,clicando duas vezes.
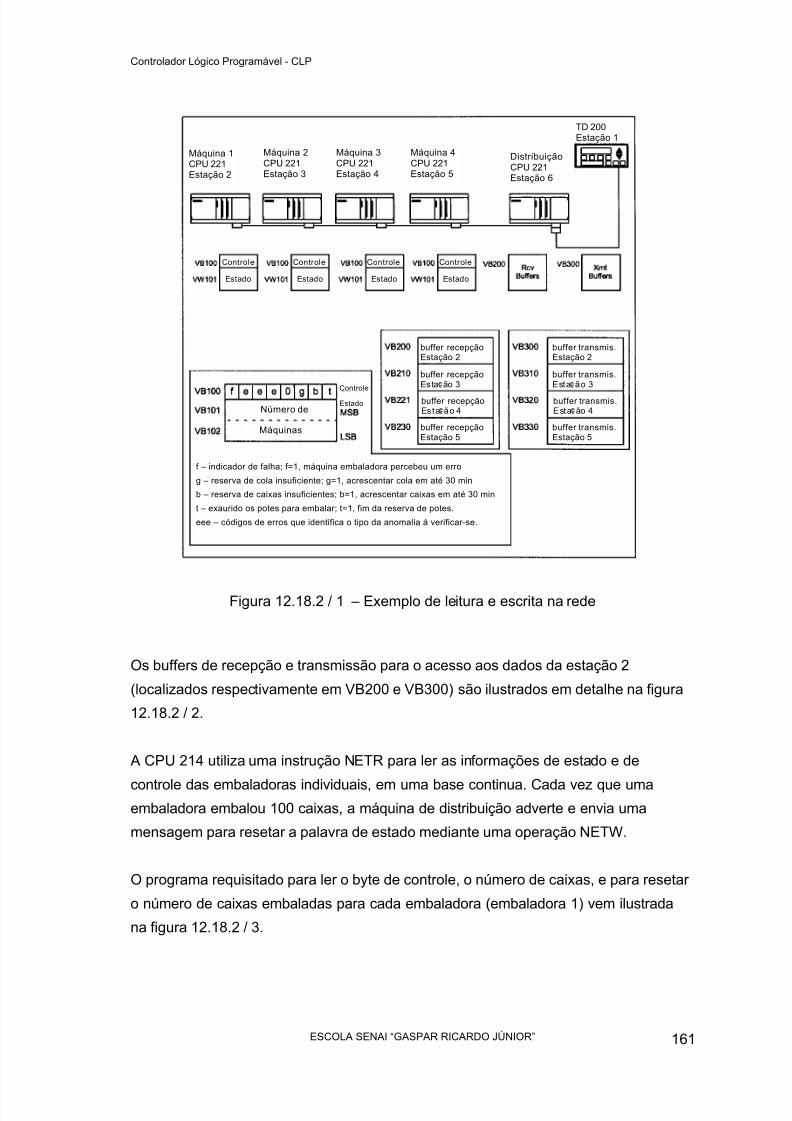
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 161/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 161
Figura 12.18.2 / 1 – Exemplo de leitura e escrita na rede
Os buffers de recepção e transmissão para o acesso aos dados da estação 2
(localizados respectivamente em VB200 e VB300) são ilustrados em detalhe na figura
12.18.2 / 2.
A CPU 214 utiliza uma instrução NETR para ler as informações de estado e de
controle das embaladoras individuais, em uma base continua. Cada vez que umaembaladora embalou 100 caixas, a máquina de distribuição adverte e envia uma
mensagem para resetar a palavra de estado mediante uma operação NETW.
O programa requisitado para ler o byte de controle, o número de caixas, e para resetar
o número de caixas embaladas para cada embaladora (embaladora 1) vem ilustrada
na figura 12.18.2 / 3.
Máquina 1CPU 221Estação 2
Máquina 2CPU 221Estação 3
Máquina 3CPU 221Estação 4
Máquina 4CPU 221Estação 5
DistribuiçãoCPU 221Estação 6
TD 200Estação 1
Controle Controle Controle Controle
Estado Estado Estado Estado
buffer recepçãoEstação 2
buffer recepçãoEsta ão 3
buffer recepçãoEsta ão 4
buffer recepçãoEstação 5
buffer transmis.Estação 2
buffer transmis.Esta ão 3
buffer transmis.Esta ão 4
buffer transmis.Estação 5
Controle
EstadoNúmero de
Máquinas
f – indicador de falha; f=1, máquina embaladora percebeu um erro
g – reserva de cola insuficiente; g=1, acrescentar cola em até 30 min
b – reserva de caixas insuficientes; b=1, acrescentar caixas em até 30 min
t – exaurido os potes para embalar; t=1, fim da reserva de potes.
eee – códigos de erros que identifica o tipo da anomalia á verificar-se.
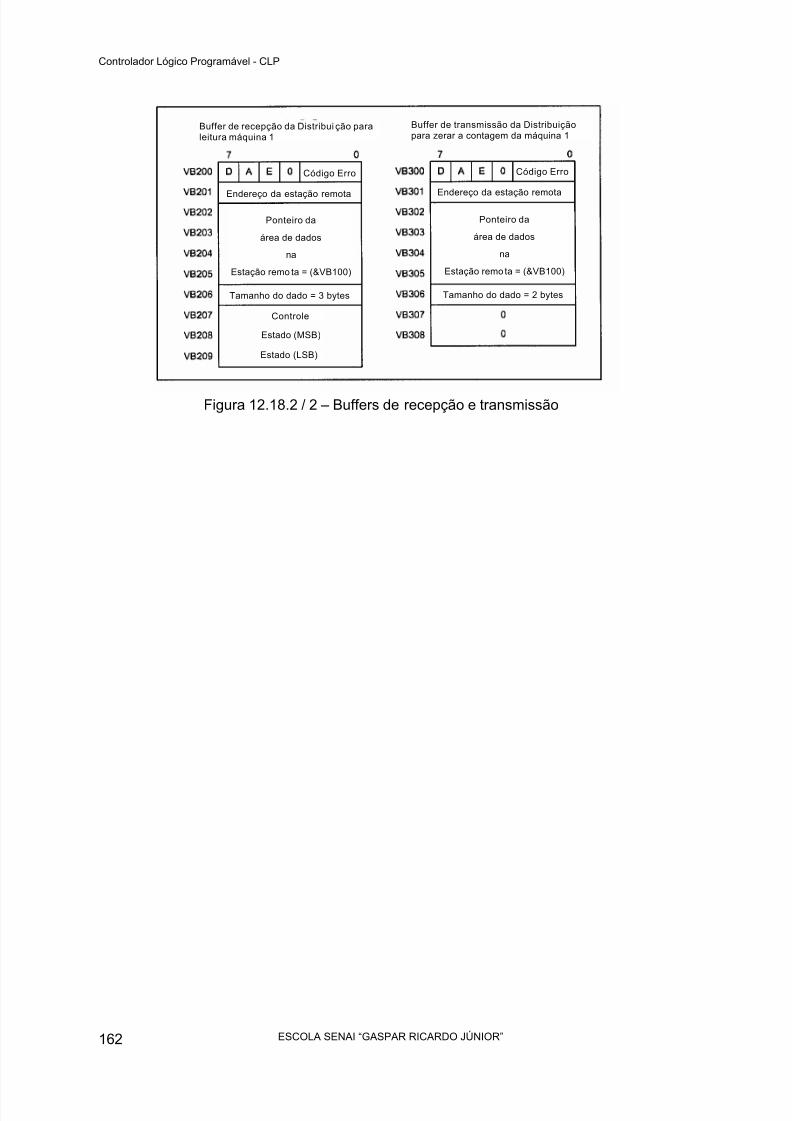
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 162/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 162
Figura 12.18.2 / 2 – Buffers de recepção e transmissão
Buffer de recepção da Distribui ção paraleitura máquina 1
Buffer de transmissão da Distribuiçãopara zerar a contagem da máquina 1
Código Erro
Endereço da estação remota
Ponteiro da
área de dados
na
Estação remo ta = (&VB100)
Ponteiro da
área de dados
na
Estação remo ta = (&VB100)
Endereço da estação remota
Código Erro
Tamanho do dado = 3 bytes Tamanho do dado = 2 bytes
Controle
Estado (MSB)
Estado (LSB)
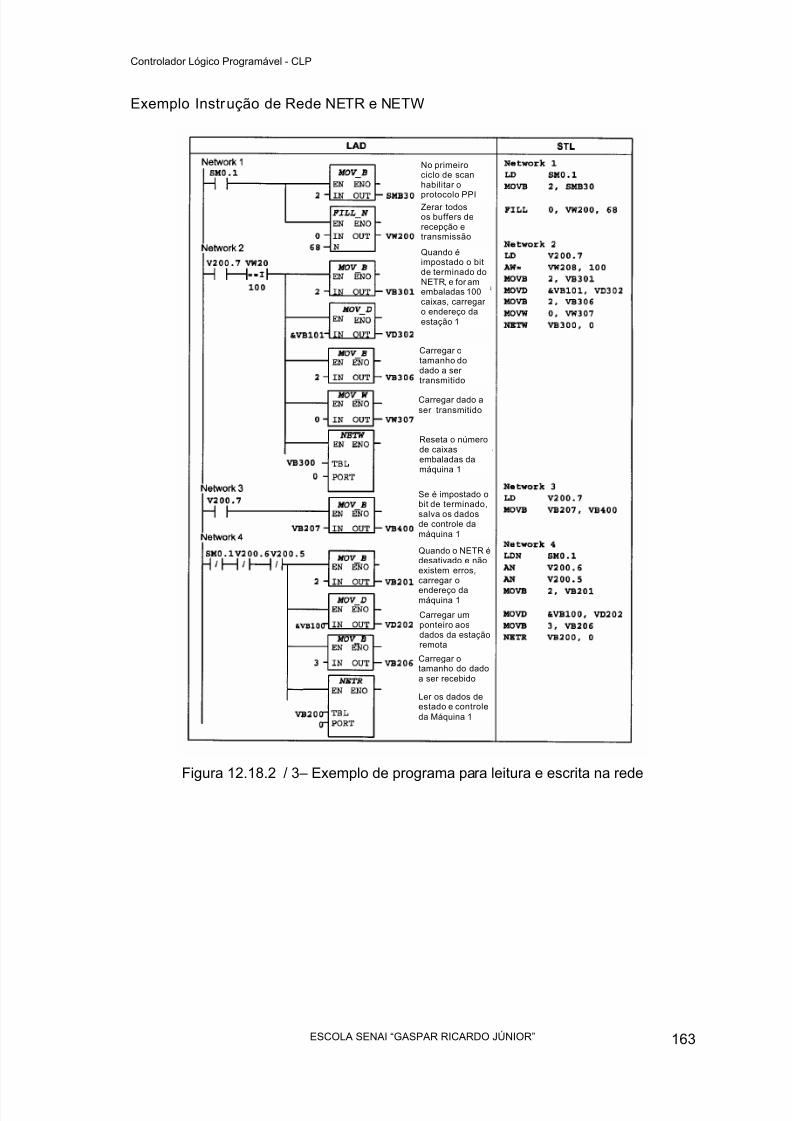
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 163/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 163
Exemplo Instrução de Rede NETR e NETW
Figura 12.18.2 / 3– Exemplo de programa para leitura e escrita na rede
No primeirociclo de scan habilitar o
protocolo PPIZerar todosos buffers derecepção etransmissão
Quando éimpostado o bitde terminado doNETR, e for amembaladas 100caixas, carregaro endereço daestação 1
Carregar otamanho dodado a sertransmitido
Carregar dado aser transmitido
Reseta o númerode caixasembaladas damáquina 1
Se é impostado obit de terminado,salva os dadosde controle damáquina 1
Quando o NETR édesativado e nãoexistem erros,carregar o
endereço damáquina 1
Carregar umponteiro aosdados da estaçãoremota
Carregar otamanho do dadoa ser recebido
Ler os dados deestado e controleda Máquina 1
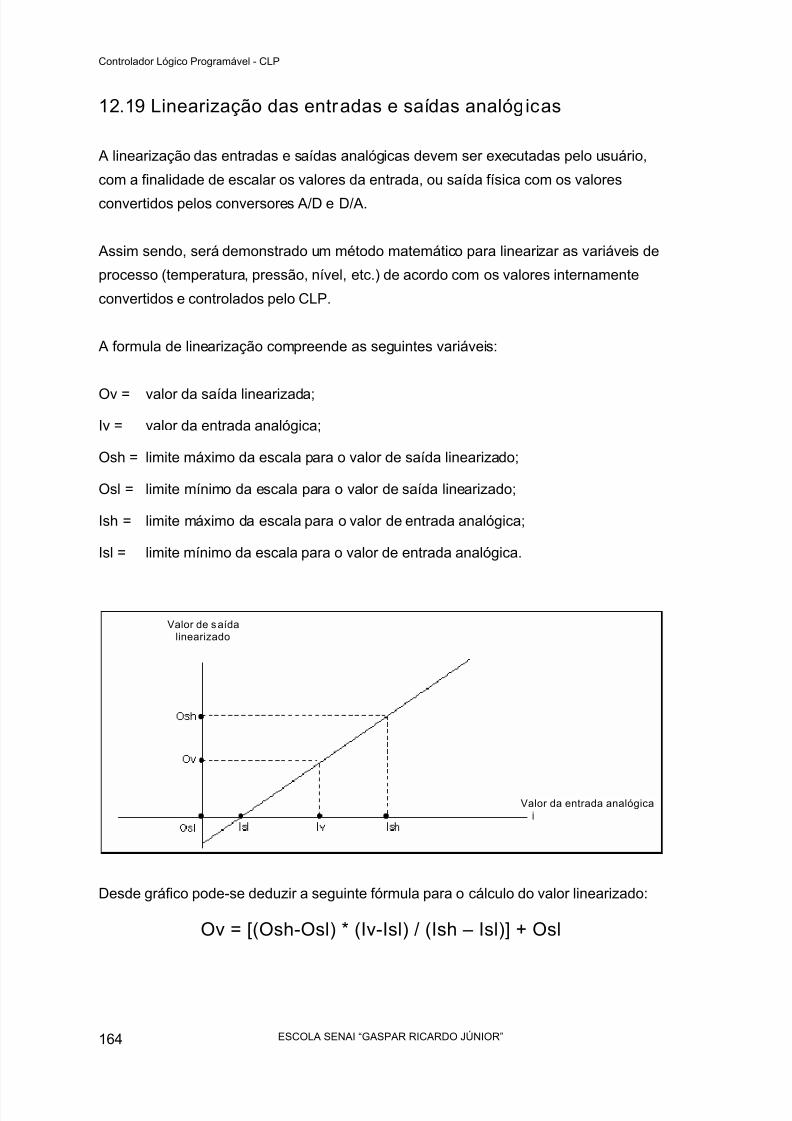
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 164/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 164
12.19 Linearização das entradas e saídas analógicas
A linearização das entradas e saídas analógicas devem ser executadas pelo usuário,
com a finalidade de escalar os valores da entrada, ou saída física com os valores
convertidos pelos conversores A/D e D/A.
Assim sendo, será demonstrado um método matemático para linearizar as variáveis de
processo (temperatura, pressão, nível, etc.) de acordo com os valores internamente
convertidos e controlados pelo CLP.
A formula de linearização compreende as seguintes variáveis:
Ov = valor da saída linearizada;
Iv = valor da entrada analógica;
Osh = limite máximo da escala para o valor de saída linearizado;
Osl = limite mínimo da escala para o valor de saída linearizado;
Ish = limite máximo da escala para o valor de entrada analógica;
Isl = limite mínimo da escala para o valor de entrada analógica.
Figura 12.19 – Representação gráfica da linearização analógica
Desde gráfico pode-se deduzir a seguinte fórmula para o cálculo do valor linearizado:
Ov = [(Osh-Osl) * (Iv-Isl) / (Ish – Isl)] + Osl
Valor de saídalinearizado
Valor da entrada analógica

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 165/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 165
13. Instruções para a
programação de um CLP
São possíveis diversos métodos para projetar e programar um sistema de Micro CLP.
No presente capítulo são descritas algumas regras gerais aplicáveis a diversos
projetos. Obviamente, é necessário as diretivas e procedimentos específicos adotados
de cada empresa e as normas práticas legais do país e de acordo com a própria
formação profissional.
De certo modo podemos apresentar uma seqüência de base para projeto e
programação:
• Subdivisão do processo;
• Criação das especificações funcionais da unidade;
• Especificação das estações do operador;
• Criação dos desenhos da configuração do CLP;
• Criação de uma lista de convenções para identificar os operandos (lista de
atribuição) e formação dos nomes simbólicos (opcional);
• Projeto de proteção dos circuitos elétricos.
13.1 Subdivisão do processo
Subdividir o processo em partes caracterizadas por um nível de interdependência.Tais partes determinarão os limites entre os controles e as descrições funcionais e o
funcionamento dos recursos de CPU, entradas e saídas.
13.2 Criação das especificações funcionais
Descrever as operações das fases individuais do processo. As seguintes orientações
devem ser incluídas:• Entradas e saídas (I/O);
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 166/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 166
• Descrição funcional da operação (modo operatório);
• Estados necessários (estados os quais devidamente alcançados constituem as
condições necessárias a execução de uma ação) de cada atuador (válvulas,
motores, unidades etc.);• Descrição das interfaces do usuário;
• Interfaces com outras partes do processo.
13.3 Projeto dos circuitos de segurança
É necessário identificar os dispositivos que precisam da lógica por cabos por razões de
segurança. Os dispositivos de controle podem estar sujeitos a defeitos que colocam auma posição inesperada a segurança do sistema, produzindo uma ligação ou
modificação no funcionamento do processo ou máquina. Dos eventuais imprevistos ou
anomalias no funcionamento podem derivar graves lesões as pessoas e danos aos
equipamentos. É então necessário, adotar dispositivos eletromecânicos de exclusão
que operam independentemente da CPU para prevenir funcionamentos perigosos.
Nos projetos dos circuitos de segurança deve-se incluir as tarefas descritas a seguir:
• Identificar os tipos de funcionamentos incorretos ou imprevistos dos atuadores que
poderão comportar-se em riscos;
• Individualizar as condições que podem assegurar um funcionamento menos
arriscado e determinar os modo de perceber tais condições independentemente da
CPU;
• Procurar prevenir o modo no qual a CPU e os I/O influenciarão o processo ao ligar
e desligar a corrente elétrica, também considerando os eventuais erros percebidos.
Estas informações deverão ser utilizadas para projetar o funcionamento no estadode normalidade e em previsão de anomalias. Não deve-se pensar que, fazendo
assim estão resolvidos todos os problemas de segurança;
• Projetar dispositivos eletromecânicos de exclusão ou de ação manual, com
capacidade de bloquear o funcionamento perigoso independentemente da CPU;
• Prevenir a transmissão de informações impróprias de estado dos circuitos
independentes a CPU, em modo que seja ao programa, seja aos dispositivos de
interface com o usuário julguem as informações requeridas;
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 167/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 167
• Individualizar cada outra norma ou dispositivo de segurança para um seguro
funcionamento do seguro do sistema.
13.4 Impostação das estações do operador
No âmbito das exigências das especificações funcionais, criar os esquemas das
estações de operação, incluindo o seguinte:
• Prospecto que relata a posição de cada estação do operador em relação ao
processo ou a máquina;
• Esquema mecânico dos dispositivos das estações de operação;• Esquema elétrico com os I/O, da CPU e unidades de expansão.
13.5 Realização dos desenhos da configuração da CPU
No âmbito das exigências das especificações funcionais, criar os esquemas das
estações de operação, incluindo o seguinte:
• Prospecto que relata a posição de cada CPU em relação ao processo ou a
máquina;
• Esquema mecânico da CPU , dos I/O e das unidades de expansão ( incluídos os
quadros elétricos e outros dispositivos);
• Esquema elétrico de cada unidade CPU, dos I/O e unidades de expansão
(incluídos os números do dispositivo, os endereços de comunicação e os
endereços de I/O).
13.6 Criação de uma lista de nomes simbólicos (opcional)
Preferindo-se usar os nomes simbólicos para endereçamento, é necessários criar uma
lista de nomes simbólicos para relacionar os endereços absolutos. Incluindo-se não
somente os sinais de I/O físicos mas também os outros elementos que serão utilizados
no programa.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 168/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 168
13.7 Modo de representação do endereçamento
13.7.1 Absoluto
Um endereço absoluto é um endereço específico na CPU (operandos formais), por
exemplo, entrada 11.0. Neste caso, não é necessário editar uma lista de simbólicos, o
programa porém é mais difícil de entender.
13.7.2 Simbólico
O endereçamento simbólico toma possível trabalhar com símbolos tais como MOTOR-
LIGA, ao invés do endereçamento absoluto. Os símbolos para entradas, saídas.
temporizadores, contadores, memory e blocos ou sub-rotinas são arquivados na lista e
simbólicos. Neste caso, os símbolos são também chamados de símbolos globais
porque o acesso é possível por todos os blocos. Em oposição ao símbolos globais,
existe também os simbólicos de bloco (locais), os quais são válidos somente no próprio
bloco. Os simbólicos de bloco são definidos na parte de declaração do bloco.
13.7.2.1 Características
O endereçamento simbólico torna possível uma leitura clara e fácil do programa.
Todos as variáveis, blocos, tipos de dados. etc., podem ser nomeados simbolicamente.
O nome simbólico pode ter até 24 caracteres, e até 80 caracteres de comentários.
A seção de simbólicos e comentários são arquivadas no terminal de programação. A
lista de simbólicos é localizada como o objeto Symbol table no programa S7 pertinente.
13.7.2.2 Simbólicos Globais
A declaração de simbólicos globais pode ser acessada por todos os componentes do
programa. Os simbólicos tem que ser criados na lista de simbólicos antes de serem
acessados por sua aplicação.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 169/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 169
13.7.2.3 Simbólicos Locais
Os simbólicos locais são declarados na parte de declaração do bloco ou sub-rotina.
Estes nomes simbólicos são somente válidos no próprio bloco onde foram gerados,
sendo parte da memória local. O mesmo nome simbólico pode ser usado várias vezes
em diferentes blocos, porque são válidos somente nos blocos pertinentes.
Simbólicos locais podem ser definidos para parâmetros de blocos, variáveis locais e
labels de saltos Jumps. Este método não necessita de uma lista de simbólicos.
13.8 Tipos de programação
13.8.1 Programa L inear
O programa inteiro reside em um único bloco de instrução contínuo. Esta estrutura é
semelhante a um circuito de relês substituído por um controlar lógico programável. O
sistema processa instruções individuais sucessivamente. (este tipo de programa é
possível na CPU S7-200)
Um programa linear tem uma estrutura simples sem ramificações, um bloco lógico
simples contém todas as instruções para o programa. Programas lineares sãosimilares a modelos de lógica de relês convencional.
É executado como o nome diz, um programa descreve um grupo de instruções que
são repetidamente realizadas seqüencialmente. Todas as instruções são localizadas
em um única bloco, geralmente no bloco de organização. Este tipo de bloco executa
continuamente, todo o programa, em um ciclo.
Quais são as Vantagens e Desvantagens ?
Considerando que todas as instruções residem dentro de um bloco, este método de
programação é indicado para projetos que tem somente uma pessoa programando.
Considerando que existe somente um arquivo de programa, são simplificadas as
funções de administração do software.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 170/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 170
Porém, levando em conta que todas as instruções residem somente em um bloco, as
instruções do programa são executadas a cada ciclo, até mesmo as partes que não
são usadas pelo programa. Este método não utiliza a sua CPU de forma eficiente.
Além disto, se existir vários dispositivos com códigos comuns em sua lógica, ele irá
repetir a mesma lógica ao invés de executar novamente com parâmetros diferentes.
Outra dificuldade que se encontra é na manutenção deste software, já que será
necessário analisar todo um programa para fazer um pequena modificação que
poderia estar restrita à um outro bloco ou subrotina menor.
Uma aplicação apropriada para a programação linear é o controle de um transportador.
Porque a lógica de programação consiste de uma seqüência simples de instruções e
não são arquivados dados, todas as entradas podem ser monitoradas e os dispositivosde saída podem ser controlado com um bloco simples.
13.8.2 Programa Partic ionado
O programa é dividido em blocos ou sub-rotinas (no caso do S7-200), cada bloco ou
sub-rotinas contém uma lógica específica para dispositivos ou tarefas. As informações
residentes no blocos de organização (OB1) determinam a ordem de execução dos
blocos ou sub-rotinas a serem processados. Um programa particionado pode, porexemplo, conter blocos ou sub-rotinas de instruções com os quais os modos de
operações individuais de um processo industrial são controlados. ( este tipo de
programa é possível na CPU S7-200 com o uso de sub-rotinas).
13.8.3 Programa Estruturado
Um programa estruturado contém blocos de instruções com parâmetros definidos pelo
usuário (blocos parametrizados). Estes blocos são projetados de forma que possam
ser usados universalmente. Os parâmetros atuais (os endereços de entradas e saídas)
são especificado durante a chamada do bloco.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 171/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 171
13.9 Utilizando as Instruções
Neste capítulo iremos descrever alguns cuidados que devem ser observados durante a
programação de um CLP. Nos capítulos anteriores foi descrito que é feita uma
verificação na entrada quanto ao nível lógico de sinal (de acordo com o programa) etambém quanto a existência ou inexistência de tensão. É irrelevante o fato de o contato
utilizado ser normalmente fechado ou normalmente aberto.
Entretanto, o mais tardar por ocasião da elaboração do programa e da execução da
tarefa de acordo com as particularidades tecnológicas, deve ser conhecido o tipo de
contato e sua finalidade técnica.
Se o contato ligado a uma entrada for normalmente aberto, a entrada terá, quando ocontato for acionado, o nível lógico “1”.
Por outro lado, se o contato for normalmente fechado, a entrada terá, quando o mesmo
for acionado, o nível lógico “0”.
O CLP não tem qualquer possibilidade de verificar se na entrada está ligado um
contato normalmente aberto ou um contato normalmente fechado; ele somente pode
verificar ou reconhecer um nível lógico “1” ou um nível lógico “0”.
Será verificada, portanto, uma entrada quanto a existência do nível lógico “1”, sendo, a
princípio, desinteressante o fato de este nível lógico ter sido gerado por um contato
normalmente aberto acionado ou um contato normalmente fechado não acionado.
Por outro lado, pode ser verificado se uma entrada tem nível lógico “0”, sendo aqui
também irrelevante o fato de este nível lógico ter sido gerado por um contato
normalmente aberto não acionado ou uma contato normalmente fechado acionado.
A questão de se tratar de um contato normalmente aberto (NA) ou normalmente
fechado (NF) torna-se importante somente ao considerar-se as condições de
segurança da instalação (ruptura de fio, liberação ativa, etc.).
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 172/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 172
ADVERTÊNCIA:
De acordo com a norma DIN 57113 / VDE 0113, item 8.8, a parada de uma
máquina sempre deve ser efetuada através do DESLIGAMENTO DE UMA
TENSÃO. Este tipo de parada é seguro porque também funciona no caso de
curto circu ito a terra, ruptura de fio ou falta de tensão no circui to emissor. Os
contatos normalmente fechados, são usados para esta finalidade em botões de
desligamento e chaves fins-de-curso, por este motivo SOB NENHUMA HIPÓTESE
devem ser subst ituídos por contatos normalmente abertos com verificação de
nível lógico “ 0” !
Para o processamento através de um CLP a tarefa de comando é dividida eminstruções de comando individuais. Uma instrução de comando é a menor unidade
independente deste programa. Ela representa a instrução de trabalho para a CPU.
Cada instrução de controle é introduzida em uma célula de memória. As instruções
individuais são processadas pela CPU do CLP de forma seqüencial, como exposto no
capítulo 8. Após o processamento da última instrução que encontra-se na memória, a
CPU começa novamente com a primeira instrução. Visto que o processamento das
instruções se repete continuamente, usa-se o termo “processamento cíclico”. O tempo
que o aparelho necessita para o processamento de todas as instruções de um
programa é denominado tempo de ciclo (scan rate).
Uma instrução de controle é constituída de duas partes: Operação e Operando (DIN
19239) :
A parte da operação descreve a função a ser executada
O QUE deve ser feito ?
Por exemplo: A formar uma associação E, ( AND)
O formar uma associação OU, (OR)
= atribuir um resultado.
A parte do operando é constituída da identificação e do parâmetro (endereço) e possui
os dados adicionais necessários para a execução:
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 173/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 173
COM O QUE isto deve ser feito ?
Por exemplo: I 1.1 processar a entrada No. 1.1
I 1.2 processar a entrada No. 1.2
Q 2.1 processar a saída No. 2.1
O parâmetro identifica o número da entrada, da saída etc. que é interrogada pela
operação e consiste por exemplo no endereço de byte e de bit, no número de um
contador, em uma célula de tempo etc.
13.10 Teste e Controle do Programa Usuário
O software de programação fornece uma variedade de funções de teste e controle do
programa usuário.
13.10.1 Utilizo de um ou mais ciclos de scan para controle do programa
O usuário pode determinar que a CPU execute o programa usuário por um número
limitado de ciclos (de 1 a 65.535). Selecionando o número de ciclos a executar, é
possível controlar o programa enquanto modificam-se as variáveis de processo. Utiliza-
se portanto o comando de menu Debug>Multiple scans para especificar o número de
ciclos de scan à executar.
13.10.2 Utilizo da tabela de estado para controlar e modificar o programa
Pode-se utilizar a tabela de estado para ler, escrever, forçar e controlar as variáveis
durante a execução do programa. Executar o comando View>Status chart
• Os ícones da barra de instrumentos da tabela de estado aparecem nesta barra em
ordem crescente, ordem decrescente, leitura individual, escreve tudo, força,
desforça, desforça tudo e lê valores de forçamento quando ativa-se a seleção da
tabela de estado.
• É possível criar várias tabelas de estado.
• Para selecionar o formato de uma célula, selecioná-la, apertar o botão direito do
mouse e ativar o menu que aparece.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 174/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 174
13.10.3 Visualização do estado do programa em LAD
O estado do programa LAD pode ser controlado pelo software de programação. Abrir
no STEP 7-Micro/WIN 32 a janela de estado LAD que indica o estado do valores dos
operandos da instrução. O estado depende do valor destes elementos, que são lidos
ao término de um ciclo de scan da CPU. O software percebe os valores para
visualização do estado no curso de mais ciclos de scan da CPU, então atualiza a
janela. De conseqüência, a janela não respeita estado atual dos elementos LAD.
Para abrir esta função selecionar o ícone na barra de instrumentos.
13.10.4 Forçamento de valores específicos
A CPU S7-200 permite de forçar alguns ou todos as entradas e as saídas (bit I e Q). O
usuário pode, além disto, decidir de forçar valores de memórias internas (V ou M) ou
analógicos ( AI e AQ). Os valores de memória V o de memória M podem ser forçados a
byte, palavra e palavra dupla. Os valores analógicos são forçados como somente
palavra, com valores a byte par (por exemplo, AIW6 ou AQW14). Todos os valores
forçados são memorizados na memória permanente EEPROM da CPU.
Durante o ciclo de scan os valores dos dados forçados podem ser modificados (doprograma, do ciclo de atualização de execução de I/O ou do ciclo de scan.
A função Force prevalece sobre as instruções diretas de leitura o escrita e sobre
saídas configuradas para passar a um valor especificado na transição em STOP: se a
CPU passa ao estado de STOP, a saída refletirá o valor forçado e não o valor
configurado.
É possível utilizar a tabela de estado para forçar os valores.
Para forçar um novo valor, especifica-lo na coluna New value da tabela e apertar o
pulsante de forçamento na barra de instrumentos. Para forçar um valor já presente,
evidencia-lo na coluna Current Value e apertar o pulsante de forçamento.
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 175/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 175
13.11 Gestão dos erros da CPU S7-200
A CPU S7-200 classifica os erros em “fatais” e “ não fatais”. Utiliza-se STEP 7-
Micro/WIN para visualizar os códigos de erros associados ao erro em questão. Para
visualizar os erros, selecionar PLC > Information na barra de menu. Aparecerá a janela
de dialogo com o código e a descrição do erro.
O campo Last fatal error , indica o código do último erro fatal gerado pelo CPU. Este
valor é mantido se a RAM não é cancelada e é eliminado quando a memória da CPU é
resetada ou se a RAM não é mantida alimentada por uma falta prolongada da corrente
elétrica.
O campo Total error fatal indica o número de erros fatais gerados pela CPU do últimoreset da área de memória da CPU. Este valor é mantido se a RAM não é cancelada e
é eliminado quando a memória da CPU é resetada ou se a RAM não é mantida
alimentada por uma falta prolongada da corrente elétrica.
13.11.1 Solução dos erros fatais
Ao verificar-se os erros fatais a CPU é induzida a parar a execução do programa
usuário.
Segundo a gravidade do erro, podem estabelecer à CPU incapacidade de executar
alguma o todas as funções. O objetivo da gestão de erros fatais é de por a CPU em um
estado estável. No qual a CPU, pode analisar e anular as condições de erros
existentes. Se a CPU percebe um erro fatal, ela passa ao modo de funcionamento
STOP . Acende-se o LED de sistema e de STOP, e são desativadas as saídas. A CPU
fica neste estado até que a condição de erro fatal não é solucionada.
Uma vez efetuada todas as modificações necessárias para corrigir as condições de
erro fatal, deve-se reeligar a CPU em um do seguintes modos:
• Desligar e ligar a CPU;
• Impostar a chave de modo operativo de RUN ou TERM a STOP;
• Ligar a CPU no software de programação, implementar a função PLC > power Up
reset da barra de menu. Neste modo força-se uma nova partida da CPU e sãoresetados os erros fatais.

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 176/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 176
Partindo a CPU é zerada as condições de erros fatais e liga uma diagnose de partida
para verificar se foi correto o erro fatal. Encontrando-se uma outra condição de erro
fatal, a CPU acende o LED de falha para indicar que ainda existe um erro. Em caso
contrário. A CPU recomeça a funcionar normalmente.
Existem diversas condições de erro que fazem a CPU tornar-se incapaz de comunicar.
Em tal caso, não será possível visualizar o código de erro da CPU. Estes tipos de erros
indicam defeito no hardware que requerem a reparação da CPU e não podem ser
resolvidos modificando o programa ou resetando a memória da CPU.
13.11.2 Gestão de erros não fatais
Os erros não fatais podem piorar o desempenho da CPU, mas não impedem de
executar o programa do usuário ou atualizar os I/O. É possível utilizar o software de
programação para visualizar os códigos de erros gerados por um erro não fatal
Existem três categorias de erros não fatais.
• Erros de tempo de execução. Todos os erros não fatais percebidos no estado de
RUN são depositados no special memory (SM), que são controlados e
interpretados do programa usuário. A CPU lê na partida a configuração de I/O e
memoriza estas informações na memória de dados do sistema e nos special
memory (SM). Durante o funcionamento normal, o estado I/O é periodicamente
atualizado e memorizado na memória SM. Se a CPU percebe uma diferença na
configuração de I/O, ela imposta o bit de “configuração modificada” no byte de
erros da unidade; a unidade de I/O não é atualizada até que seja resetado este bit.
Até que a CPU reseta, as entradas e as saídas da unidade devem novamente
corresponder a configuração de I/O memorizadas na memória de dados do
sistema.
• Erros de compilação do programa. A CPU compila o programa usuário enquanto o
programa é carregado nela. Se nesta fase a CPU percebe a violação de uma regra
da compilação, a operação de carregamento é interrompida e é gerado um código
de erro. (um programa que já foi carregado na CPU existe, seja como for, ainda na
EEPROM e não foi perdido). Depois de ter corrigido o programa tenta-se carregá-lo
novamente na CPU.
• Erro de execução do programa. O programa pode gerar condições de erro durante
a execução. Por exemplo, um ponteiro de endereçamento indireto, que era válido
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 177/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 177
ao momento da compilação do programa, pode depois ser modificado durante a
execução do programa e apontar a endereços fora do campo especificado. Isto é
considerado um erro de programação do tempo de execução.
A CPU não passa ao estado de STOP quando percebe um erro não fatal. Ela registra o
evento nos special memory e prossegue a execução do programa usuário. O usuário
pode, todavia, configurar o programa em modo de forçar a CPU a passar ao estado de
STOP a cada detecção de um erro não fatal. (combinação do SM5.0 e instrução
STOP)
13.12 Documentação do Programa
Documentar um programa é extremamente útil e seguro para futuras intervenções na
máquina ou processos controlados por CLP’s. Ajuda também, durante a elaboração do
programa permitindo ao usuário identificar com mais rapidez e clareza os operandos
do sistema de acordo com as necessidades tecnológicas da máquina ou processo
automatizado.
O software STEP 7-Micro/WIN 32 traz funções incorporadas que auxiliam uma boa
forma de documentar o programa elaborado pelo usuário, estas funções são as
seguintes:
• Listagem do programa em lista de instruções (STL), diagrama de contatos (LAD) e
diagramas de blocos lógicos (FBD). É possível selecionar com visualização
simbólica ou não;
• Tabela de simbólicos (Symbol Table). Utilizada para identificar os operandos de
forma relacionada ao processo (bomba 1, liga misturador 2, nível do tanque 1 alto,
etc.);
• Tabela de referência cruzada (Cross Reference). Utilizada para gerar uma tabela
de uso dos operandos identificando em quais segmentos foram usados e em que
forma. É possível ainda observar o uso de todos os operandos do sistema em byte
e bit utilizados (importante em uma modificação futura da máquina ou processo
automatizado para identificar os operandos livres que podem ser usados para
outras tarefas).
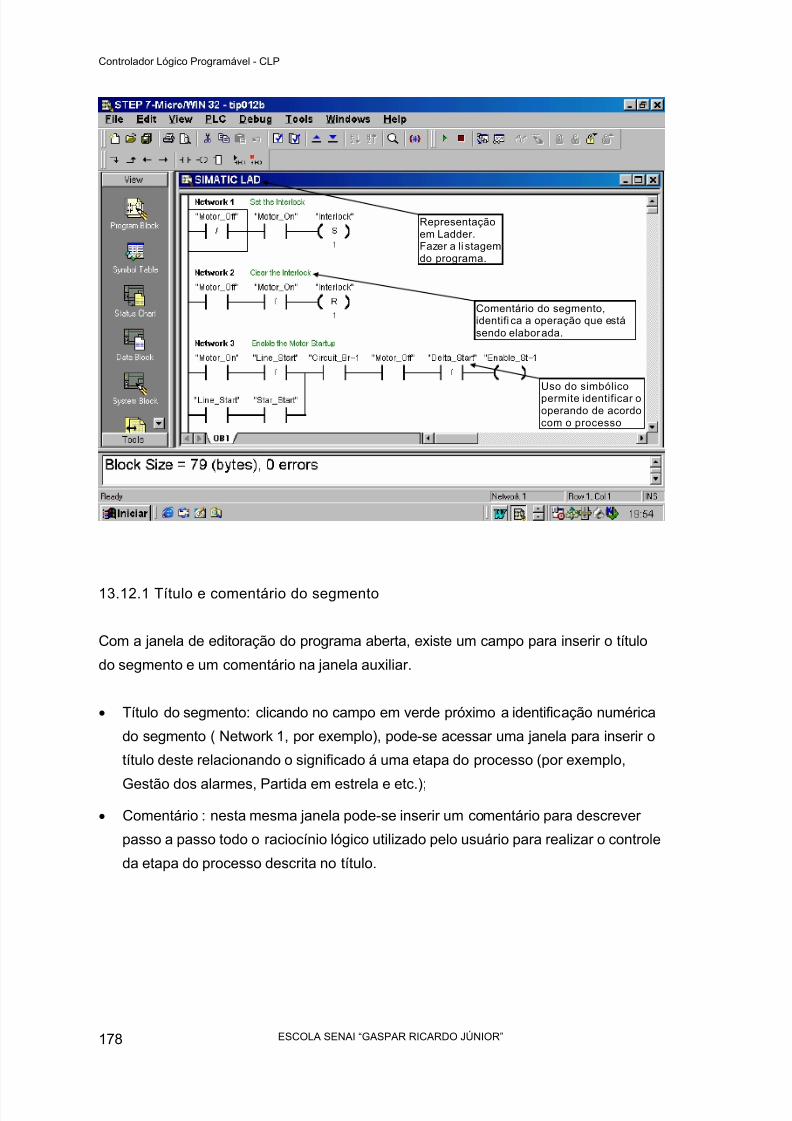
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 178/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 178
13.12.1 Título e comentário do segmento
Com a janela de editoração do programa aberta, existe um campo para inserir o título
do segmento e um comentário na janela auxiliar.
• Título do segmento: clicando no campo em verde próximo a identificação numérica
do segmento ( Network 1, por exemplo), pode-se acessar uma janela para inserir o
título deste relacionando o significado á uma etapa do processo (por exemplo,
Gestão dos alarmes, Partida em estrela e etc.);
• Comentário : nesta mesma janela pode-se inserir um comentário para descrever
passo a passo todo o raciocínio lógico utilizado pelo usuário para realizar o controle
da etapa do processo descrita no título.
Representaçãoem Ladder.Fazer a li stagemdo programa.
Comentário do segmento,identifi ca a operação que estásendo elaborada.
Uso do simbólicopermite identificar ooperando de acordocom o processo
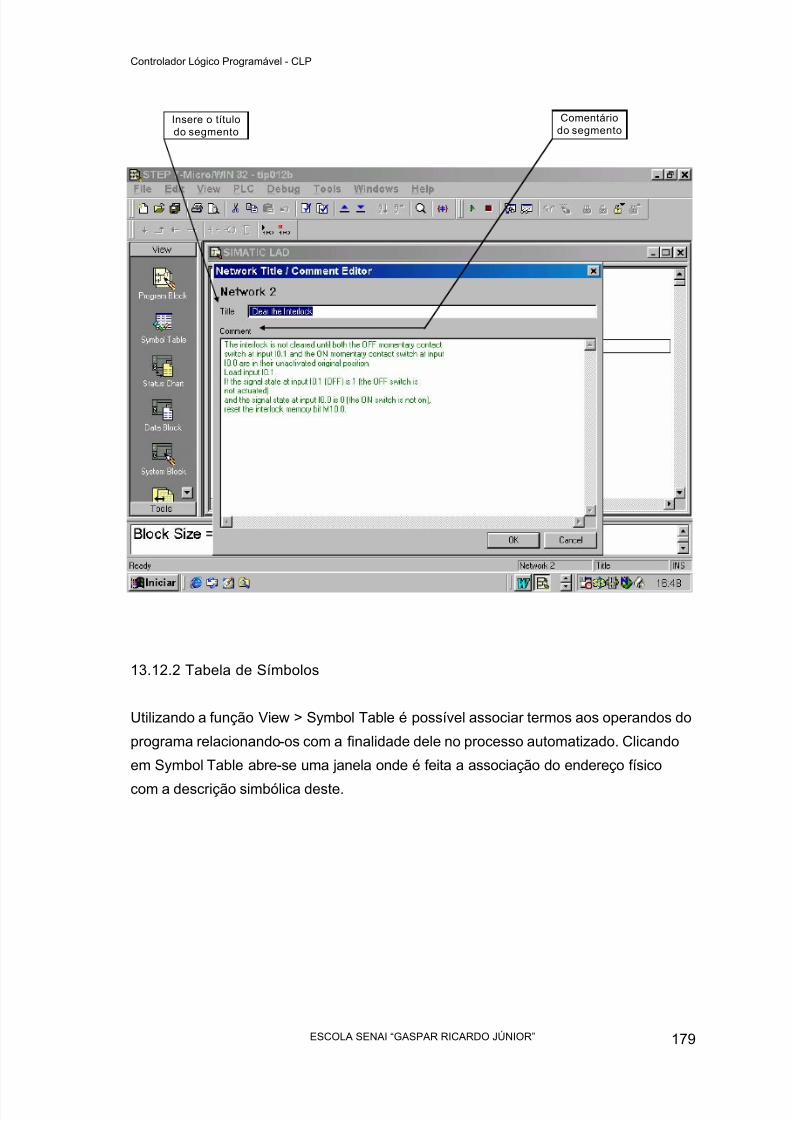
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 179/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 179
13.12.2 Tabela de Símbolos
Utilizando a função View > Symbol Table é possível associar termos aos operandos do
programa relacionando-os com a finalidade dele no processo automatizado. Clicando
em Symbol Table abre-se uma janela onde é feita a associação do endereço físico
com a descrição simbólica deste.
Insere o títulodo segmento
Comentáriodo segmento

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 180/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 180
13.12.3 Tabela de referência cruzada
Utilizando a função View > Cross Reference é possível gerar uma tabela de uso dos
operandos identificando em quais segmentos foram usados e em que forma. É
Nome dosimbólico
Endereço físicoassociado ao
nome simbólico
Comentário dosimbólico
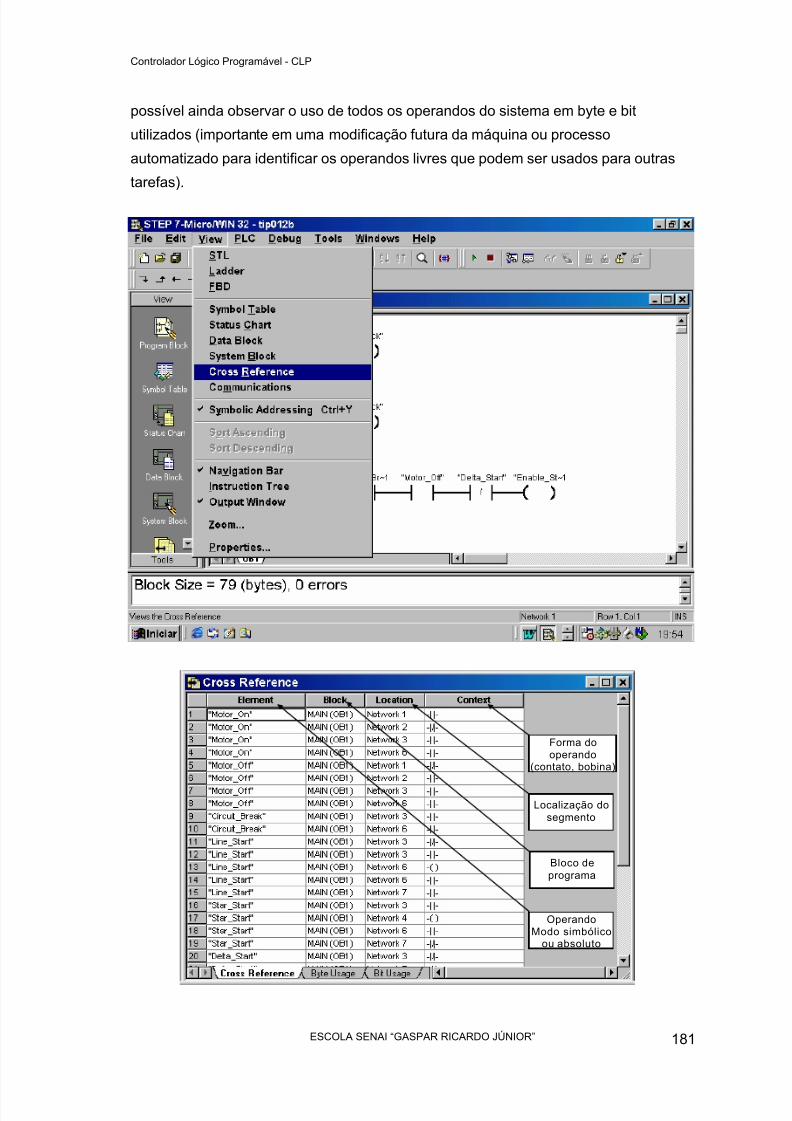
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 181/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 181
possível ainda observar o uso de todos os operandos do sistema em byte e bit
utilizados (importante em uma modificação futura da máquina ou processo
automatizado para identificar os operandos livres que podem ser usados para outras
tarefas).
Forma dooperando
(contato, bobina)
Localização dosegmento
Bloco deprograma
OperandoModo simbólico
ou absoluto
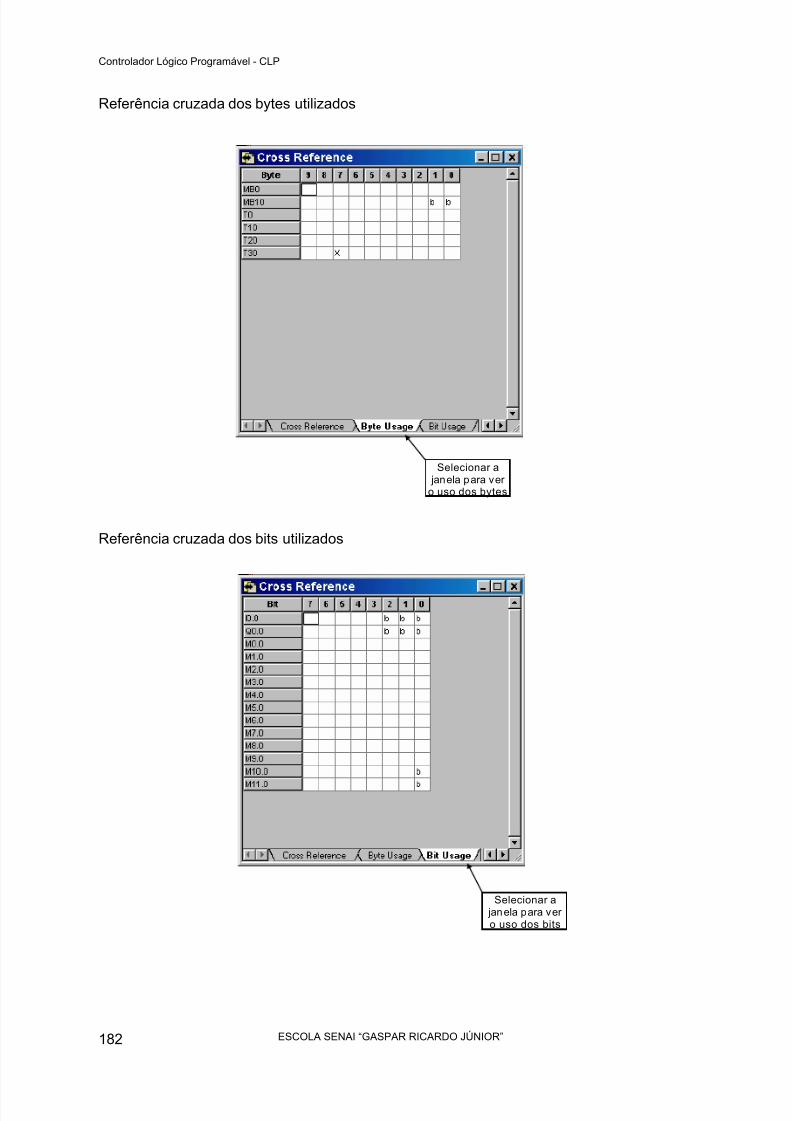
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 182/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 182
Referência cruzada dos bytes utilizados
Referência cruzada dos bits utilizados
Selecionar a janela para vero uso dos bytes
Selecionar a janela para vero uso dos bits
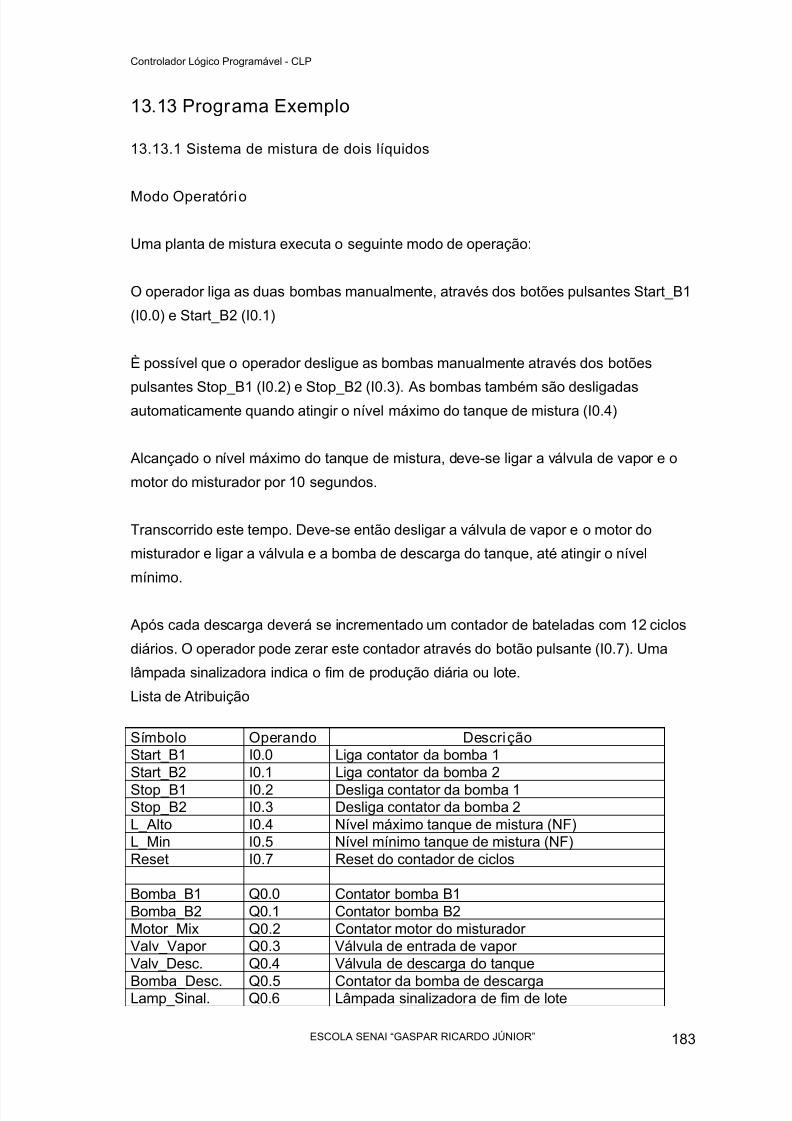
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 183/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 183
13.13 Programa Exemplo
13.13.1 Sistema de mistura de dois líquidos
Modo Operatório
Uma planta de mistura executa o seguinte modo de operação:
O operador liga as duas bombas manualmente, através dos botões pulsantes Start_B1
(I0.0) e Start_B2 (I0.1)
È possível que o operador desligue as bombas manualmente através dos botões
pulsantes Stop_B1 (I0.2) e Stop_B2 (I0.3). As bombas também são desligadasautomaticamente quando atingir o nível máximo do tanque de mistura (I0.4)
Alcançado o nível máximo do tanque de mistura, deve-se ligar a válvula de vapor e o
motor do misturador por 10 segundos.
Transcorrido este tempo. Deve-se então desligar a válvula de vapor e o motor do
misturador e ligar a válvula e a bomba de descarga do tanque, até atingir o nível
mínimo.
Após cada descarga deverá se incrementado um contador de bateladas com 12 ciclos
diários. O operador pode zerar este contador através do botão pulsante (I0.7). Uma
lâmpada sinalizadora indica o fim de produção diária ou lote.
Lista de Atribuição
Símbolo Operando DescriçãoStart_B1 I0.0 Liga contator da bomba 1Start_B2 I0.1 Liga contator da bomba 2
Stop_B1 I0.2 Desliga contator da bomba 1Stop_B2 I0.3 Desliga contator da bomba 2L_Alto I0.4 Nível máximo tanque de mistura (NF)L_Min I0.5 Nível mínimo tanque de mistura (NF)Reset I0.7 Reset do contador de ciclos
Bomba_B1 Q0.0 Contator bomba B1Bomba_B2 Q0.1 Contator bomba B2Motor_Mix Q0.2 Contator motor do misturadorValv_Vapor Q0.3 Válvula de entrada de vaporValv_Desc. Q0.4 Válvula de descarga do tanque
Bomba_Desc. Q0.5 Contator da bomba de descargaLamp_Sinal. Q0.6 Lâmpada sinalizadora de fim de lote
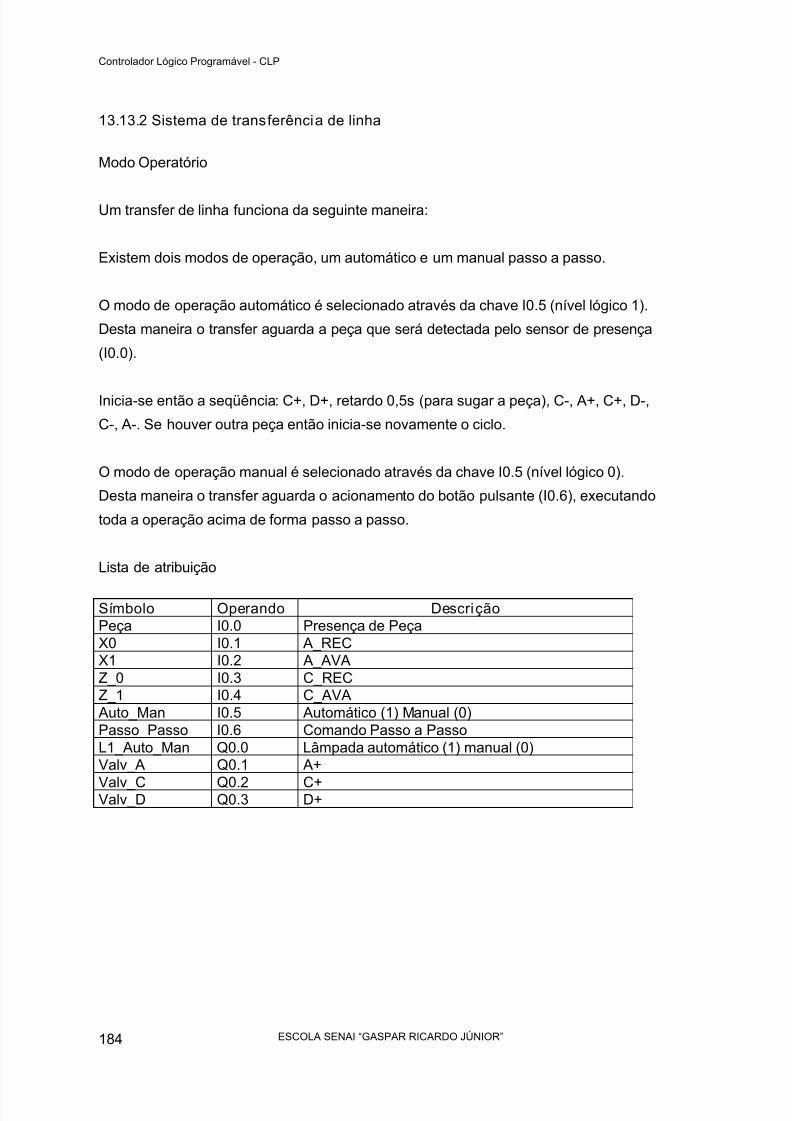
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 184/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 184
13.13.2 Sistema de transferência de linha
Modo Operatório
Um transfer de linha funciona da seguinte maneira:
Existem dois modos de operação, um automático e um manual passo a passo.
O modo de operação automático é selecionado através da chave I0.5 (nível lógico 1).
Desta maneira o transfer aguarda a peça que será detectada pelo sensor de presença
(I0.0).
Inicia-se então a seqüência: C+, D+, retardo 0,5s (para sugar a peça), C-, A+, C+, D-,
C-, A-. Se houver outra peça então inicia-se novamente o ciclo.
O modo de operação manual é selecionado através da chave I0.5 (nível lógico 0).
Desta maneira o transfer aguarda o acionamento do botão pulsante (I0.6), executando
toda a operação acima de forma passo a passo.
Lista de atribuição
Símbolo Operando DescriçãoPeça I0.0 Presença de PeçaX0 I0.1 A_RECX1 I0.2 A_AVAZ_0 I0.3 C_RECZ_1 I0.4 C_AVA Auto_Man I0.5 Automático (1) Manual (0)Passo_Passo I0.6 Comando Passo a PassoL1_Auto_Man Q0.0 Lâmpada automático (1) manual (0)Valv_A Q0.1 A+
Valv_C Q0.2 C+Valv_D Q0.3 D+
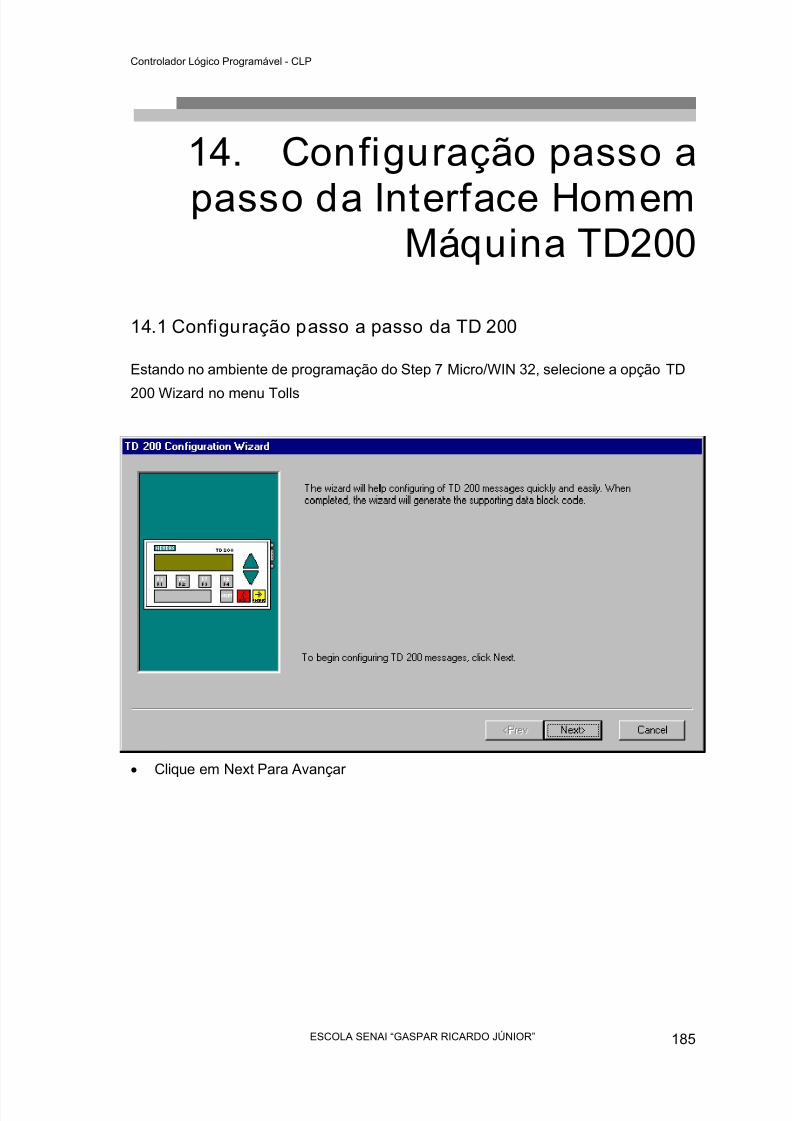
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 185/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 185
14. Configuração passo a
passo da Interface HomemMáquina TD200
14.1 Configuração passo a passo da TD 200
Estando no ambiente de programação do Step 7 Micro/WIN 32, selecione a opção TD
200 Wizard no menu Tolls
• Clique em Next Para Avançar
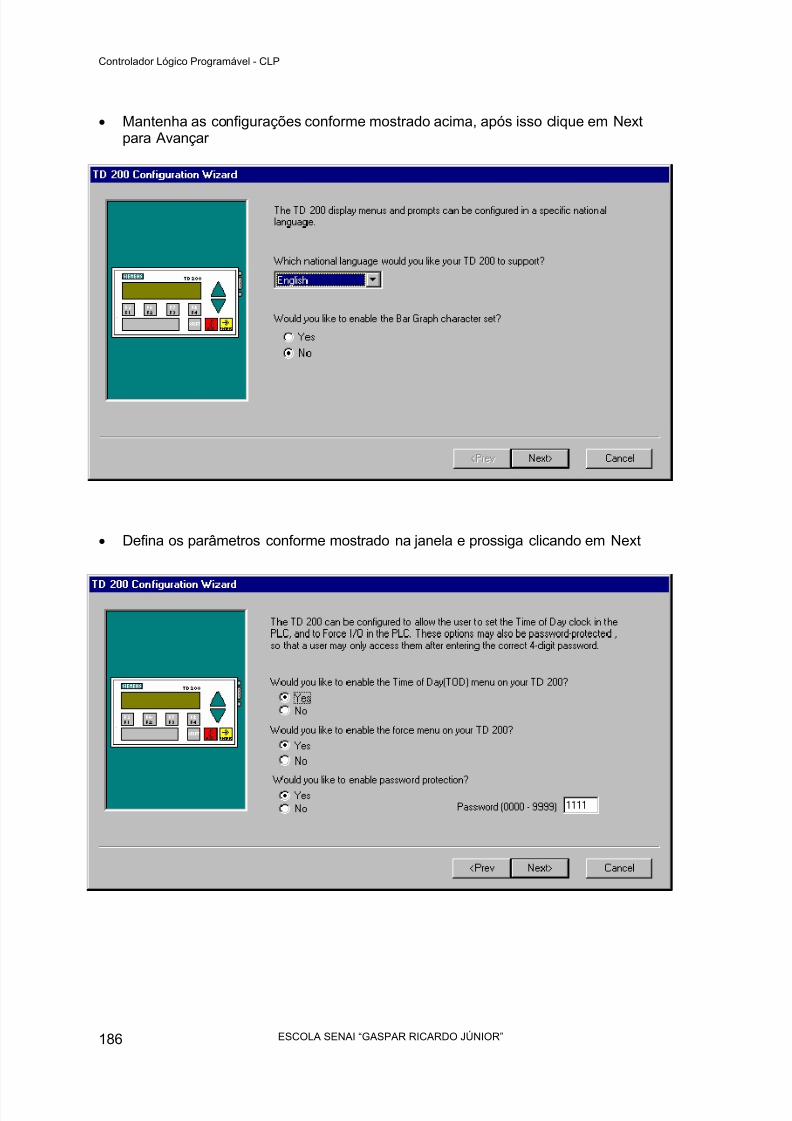
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 186/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 186
• Mantenha as configurações conforme mostrado acima, após isso clique em Next para Avançar
• Defina os parâmetros conforme mostrado na janela e prossiga clicando em Next
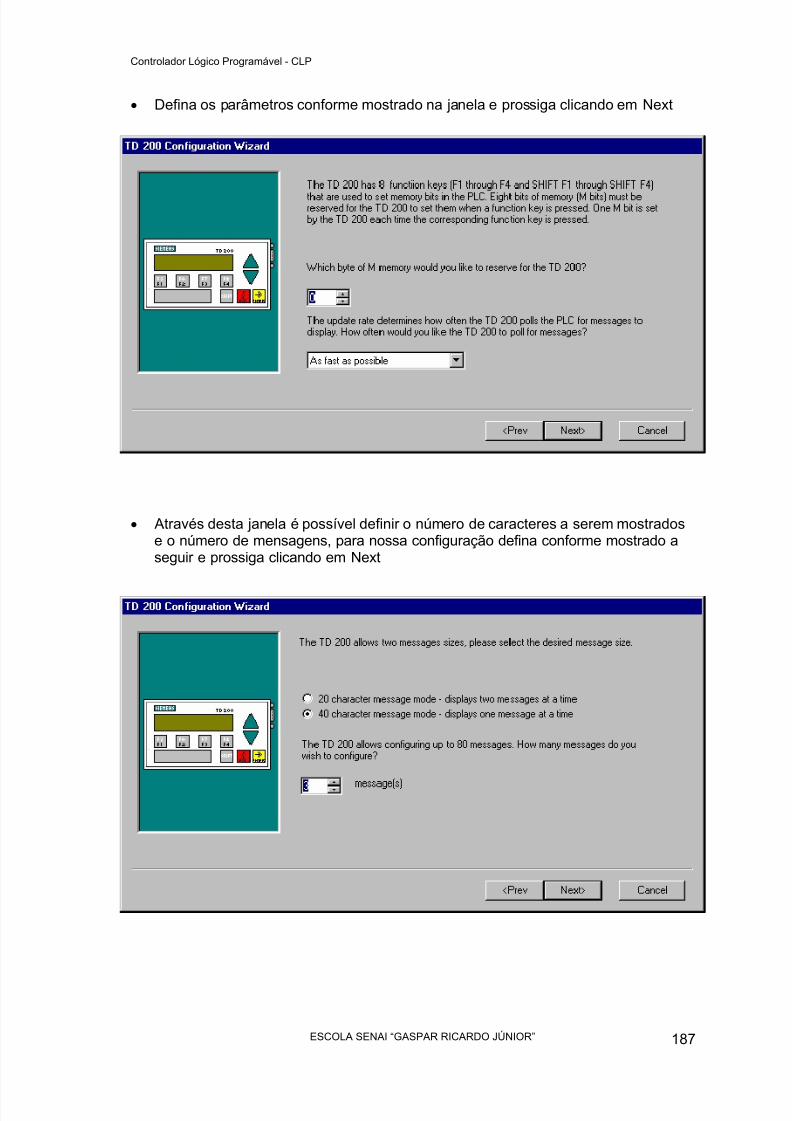
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 187/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 187
• Defina os parâmetros conforme mostrado na janela e prossiga clicando em Next
• Através desta janela é possível definir o número de caracteres a serem mostradose o número de mensagens, para nossa configuração defina conforme mostrado aseguir e prossiga clicando em Next
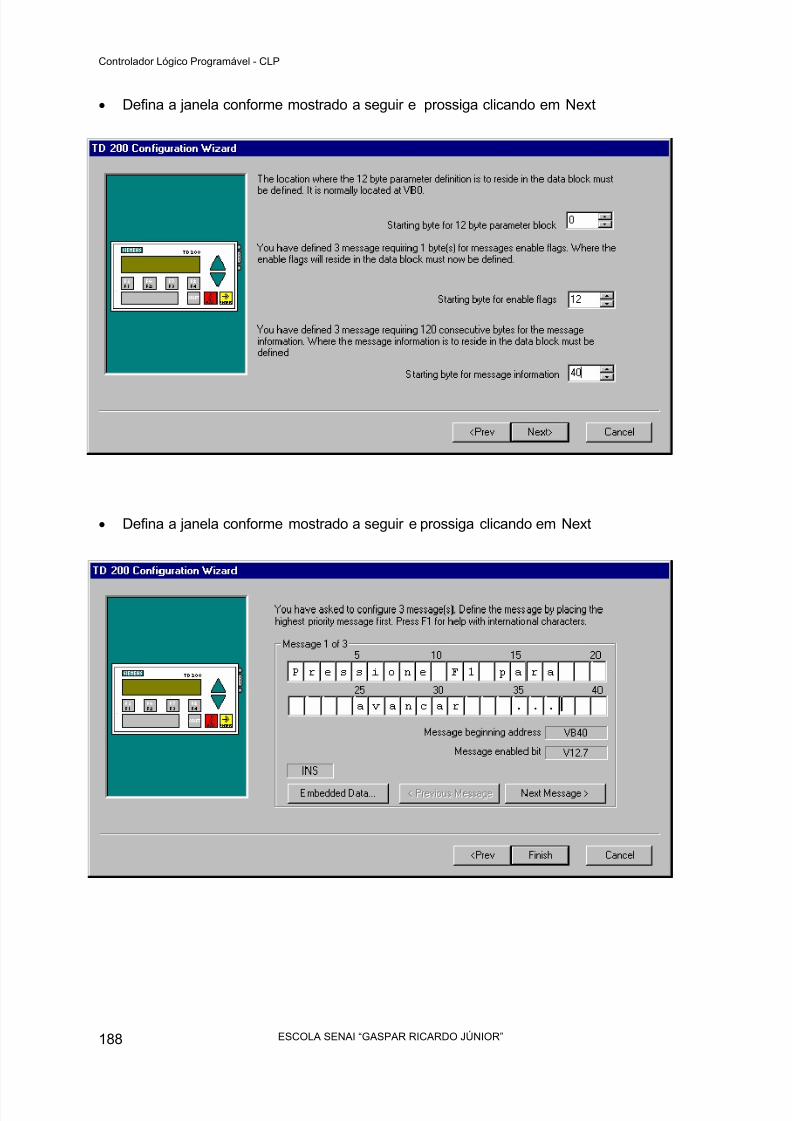
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 188/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 188
• Defina a janela conforme mostrado a seguir e prossiga clicando em Next
• Defina a janela conforme mostrado a seguir e prossiga clicando em Next
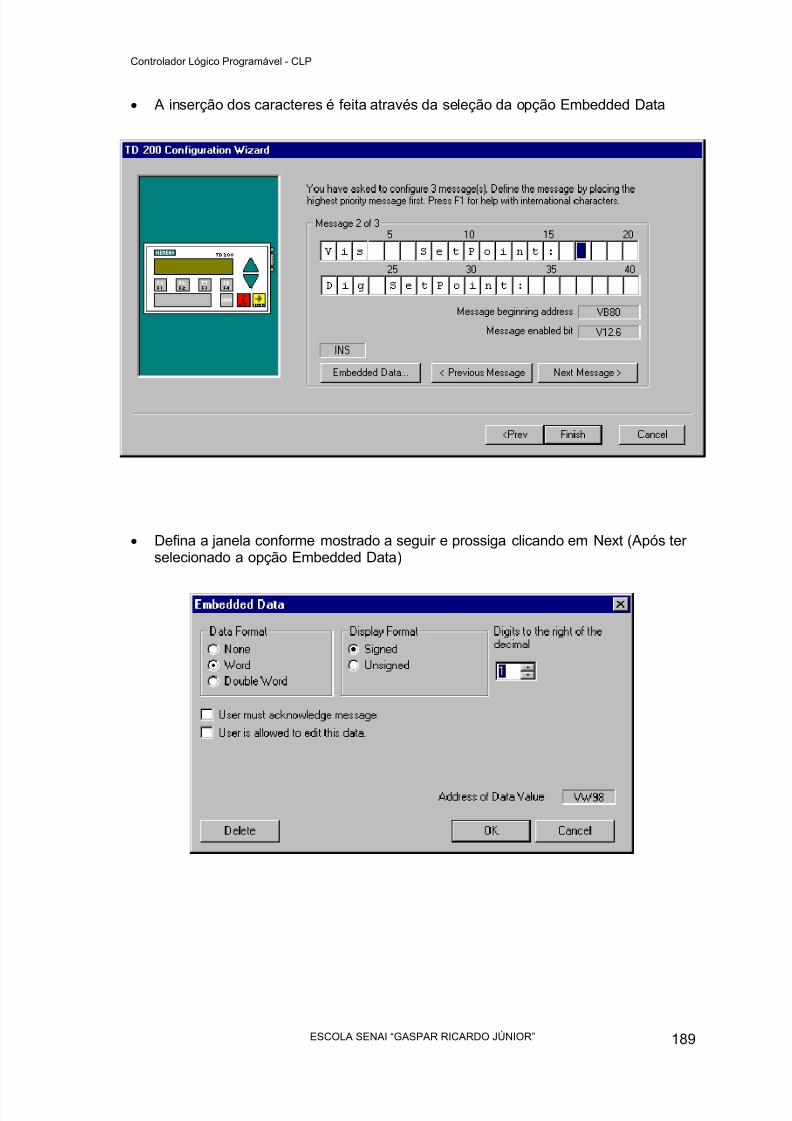
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 189/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 189
• A inserção dos caracteres é feita através da seleção da opção Embedded Data
• Defina a janela conforme mostrado a seguir e prossiga clicando em Next (Após terselecionado a opção Embedded Data)
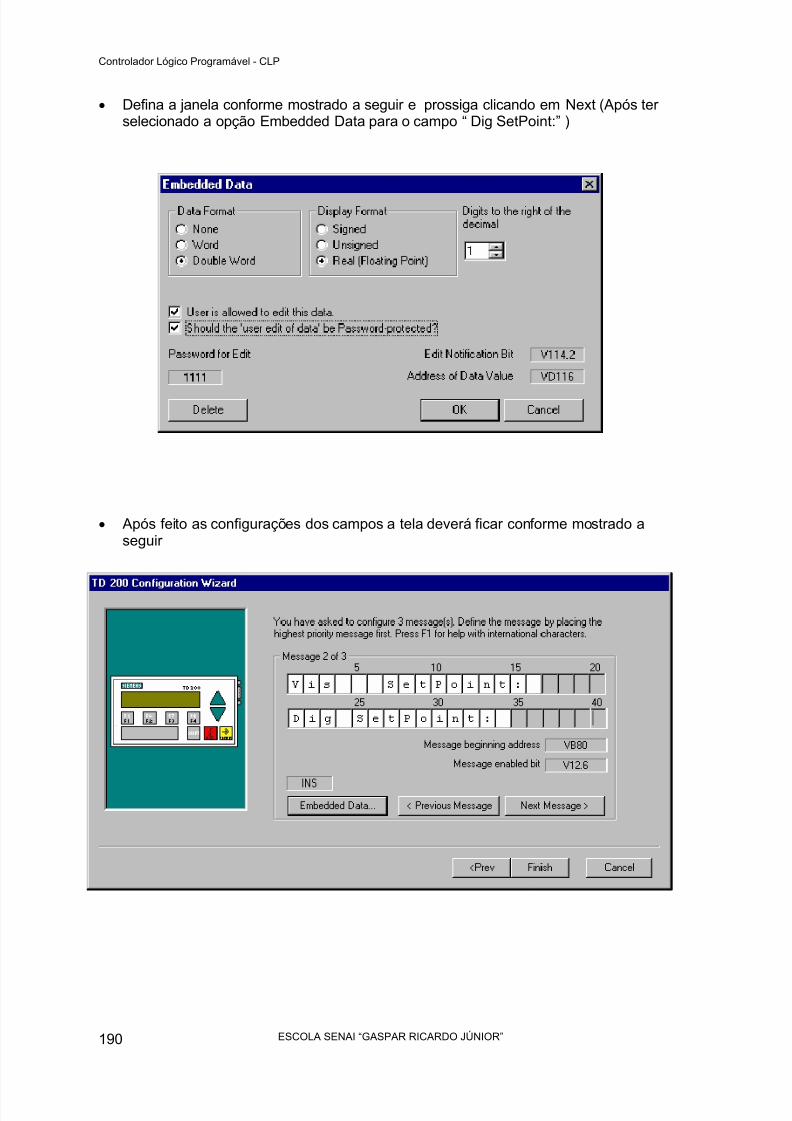
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 190/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 190
• Defina a janela conforme mostrado a seguir e prossiga clicando em Next (Após terselecionado a opção Embedded Data para o campo “ Dig SetPoint:” )
• Após feito as configurações dos campos a tela deverá ficar conforme mostrado aseguir
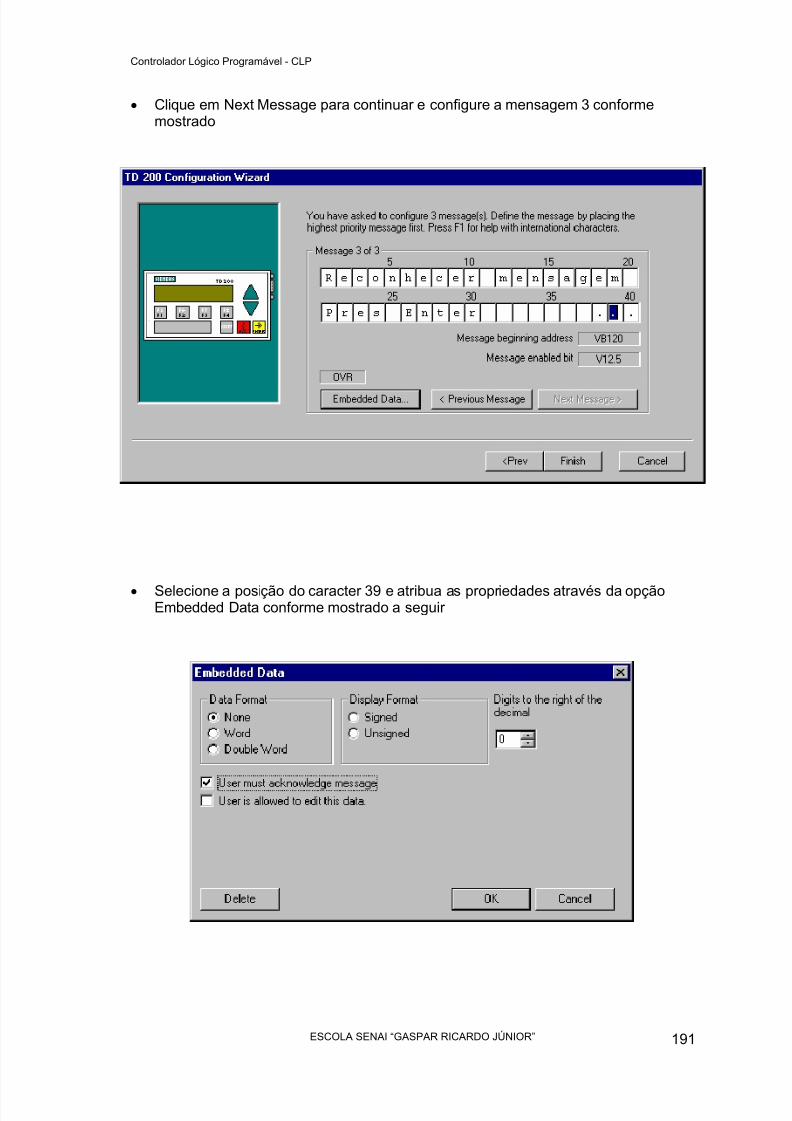
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 191/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 191
• Clique em Next Message para continuar e configure a mensagem 3 conformemostrado
• Selecione a posição do caracter 39 e atribua as propriedades através da opçãoEmbedded Data conforme mostrado a seguir

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 192/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 192
• Finalmente concluídas as edições de nossas 03 telas, clique em Finish

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 193/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 193
Parametri zação da TD 200 – (Editor somente em inglês)
////DATA BLOCK COMMENTS////Press F1 for help and example data block ////BEGIN TD200_BLOCK 0////(Comments within this block should not be edited or removed)//VB0 'TD'VB2 16#10 //Set Language to English, set Update to as fast as possibleVB3 16#1 //Set the display to 40 character mode; Up key V3.2; Down key V3.3;VB4 1 //Set the number of messagesVB5 0 //Set the Function Keys notification bits to M0.0 - M0.7VW6 32 //Set the starting address for messages to VW32
VW8 12 //Set the starting address for message enable bits to VW12//MESSAGE 1//Message Enable Bit V12.7 VB32 'ST2I:'VB37 16#0 //No Edit;No Acknowledgement;No Password;VB38 16#10 //Signed Word; 0 Digits to the right of the decimal;VW39 16#0 //Embedded Data Value: Move data for display here.VB41 ' ST2Q: 'VB48 16#0 //No Edit;No Acknowledgement;No Password;VB49 16#10 //Signed Word; 0 Digits to the right of the decimal;VW50 16#0 //Embedded Data Value: Move data for display here.VB52 'ST3I:'
VB57 16#0 //No Edit;No Acknowledgement;No Password;VB58 16#10 //Signed Word; 0 Digits to the right of the decimal;VW59 16#0 //Embedded Data Value: Move data for display here.VB61 ' ST3Q: 'VB68 16#0 //No Edit;No Acknowledgement;No Password;VB69 16#10 //Signed Word; 0 Digits to the right of the decimal;VW70 16#0 //Embedded Data Value: Move data for display here.//END TD200_BLOCK 0
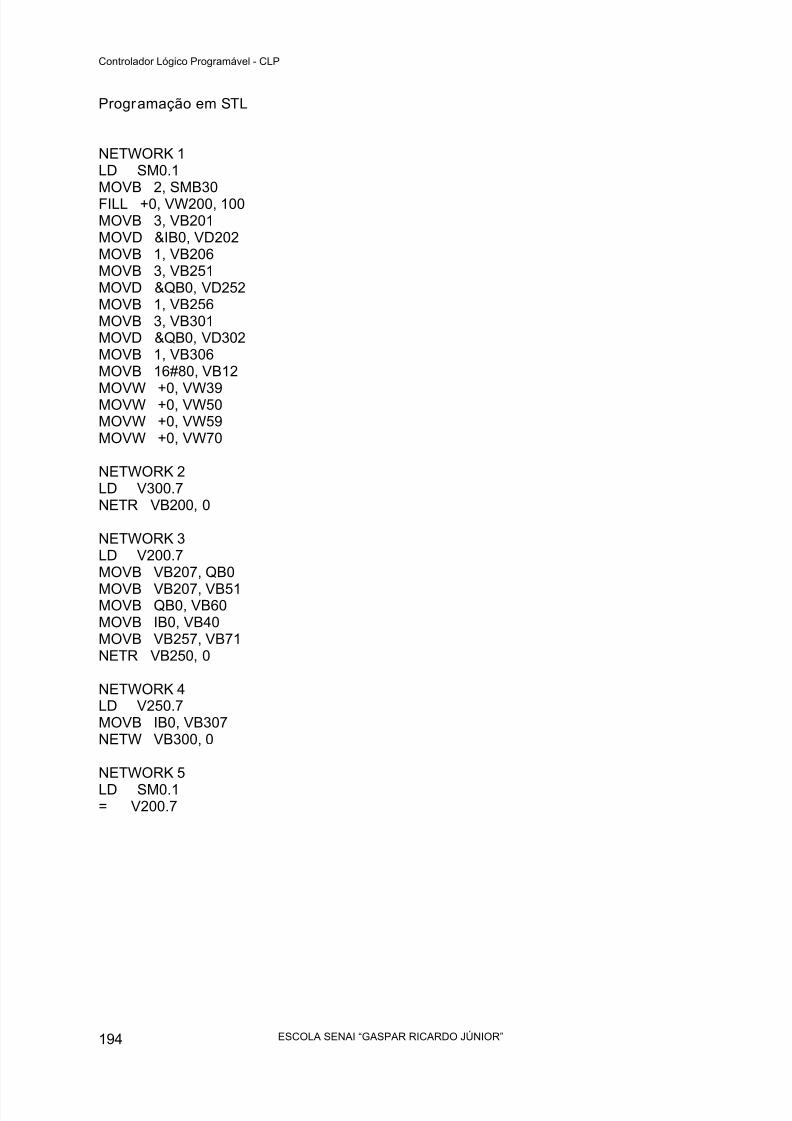
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 194/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 194
Programação em STL
NETWORK 1LD SM0.1MOVB 2, SMB30FILL +0, VW200, 100MOVB 3, VB201MOVD &IB0, VD202MOVB 1, VB206MOVB 3, VB251MOVD &QB0, VD252MOVB 1, VB256MOVB 3, VB301MOVD &QB0, VD302MOVB 1, VB306MOVB 16#80, VB12
MOVW +0, VW39MOVW +0, VW50MOVW +0, VW59MOVW +0, VW70
NETWORK 2LD V300.7NETR VB200, 0
NETWORK 3LD V200.7MOVB VB207, QB0
MOVB VB207, VB51MOVB QB0, VB60MOVB IB0, VB40MOVB VB257, VB71NETR VB250, 0
NETWORK 4LD V250.7MOVB IB0, VB307NETW VB300, 0
NETWORK 5
LD SM0.1= V200.7
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 195/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 195
15. Parte Prática – Básica
Utilizando o software de programação STEP 7-Micro/WIN 32, elaborar os programas
de acordo com o modo operatório e a lista de atribuição dos operando de cada
exercício.
15.1 Exercício 1 – Comando de partida e parada de um motortrifásico
Modo Operatório
Um motor trifásico é ligado apertando o botão pulsante S1 (botão pulsante de partida)
e desligado através do botão pulsante S0 (botão pulsante de parada)
As lâmpadas de sinalização H1 e H2 sinalizam o estado de atividade do motor.
O motor pode ser protegido através de um relê térmico de sobrecorrente ou por meio
de um disjuntor motor, ambos interligados ao CLP e intertravado eletricamente.
Uso com relê térmico:
Por motivo de segurança o contato normalmente fechado do relê térmico de
sobrecorrente F3 deve ser associado em série com a bobina do contator K1. Quando
ativa-se o relê térmico de sobrecorrente , a bobina do contator K1 é desligadadiretamente via comando elétrico (hardware) sem a intervenção do controlador. O relê
térmico de sobrecorrente deve ser dotado de rearme manual para evitar uma
sucessiva ativação do contator K1 devido a rearme automático do relê.
È aconselhável neste caso especificar o relê térmico com dois contatos normalmente
fechados (NF), um será utilizado para o intertravamento elétrico e o outro será
interligado ao CLP para realizar os intertravamentos lógicos necessários no programa
e também para geração de alarmes.
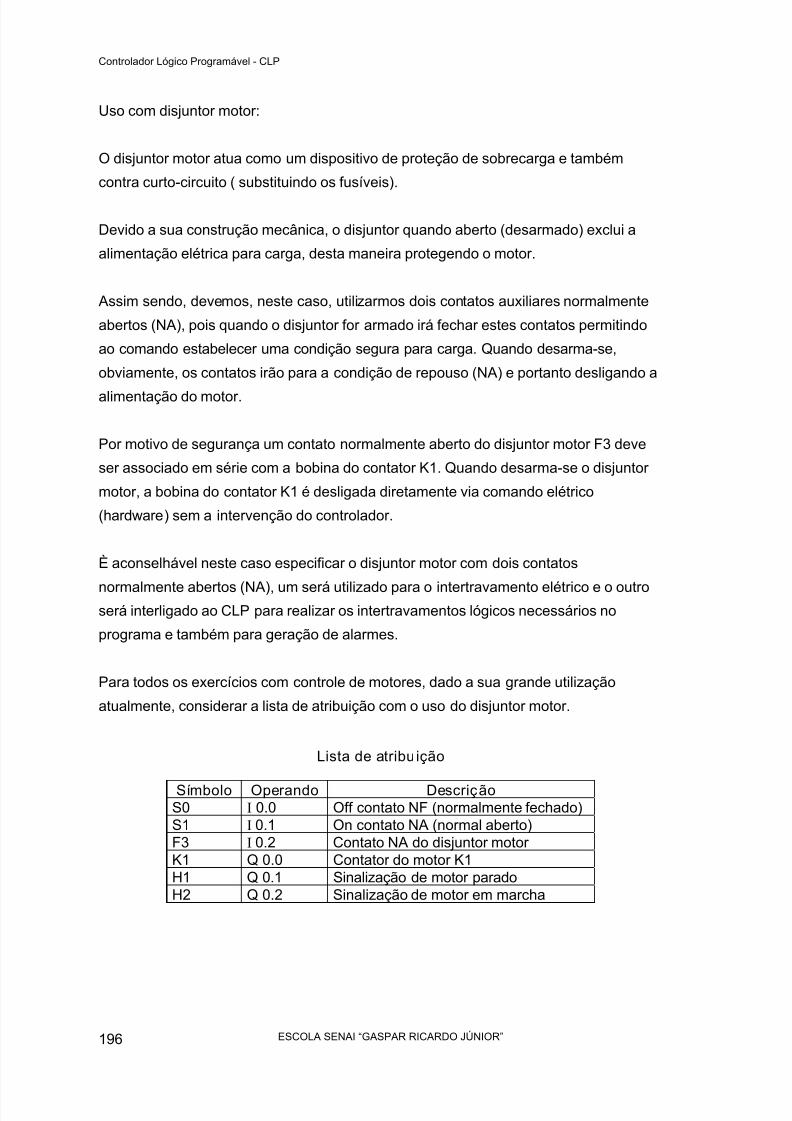
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 196/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 196
Uso com disjuntor motor:
O disjuntor motor atua como um dispositivo de proteção de sobrecarga e também
contra curto-circuito ( substituindo os fusíveis).
Devido a sua construção mecânica, o disjuntor quando aberto (desarmado) exclui a
alimentação elétrica para carga, desta maneira protegendo o motor.
Assim sendo, devemos, neste caso, utilizarmos dois contatos auxiliares normalmente
abertos (NA), pois quando o disjuntor for armado irá fechar estes contatos permitindo
ao comando estabelecer uma condição segura para carga. Quando desarma-se,
obviamente, os contatos irão para a condição de repouso (NA) e portanto desligando a
alimentação do motor.
Por motivo de segurança um contato normalmente aberto do disjuntor motor F3 deve
ser associado em série com a bobina do contator K1. Quando desarma-se o disjuntor
motor, a bobina do contator K1 é desligada diretamente via comando elétrico
(hardware) sem a intervenção do controlador.
È aconselhável neste caso especificar o disjuntor motor com dois contatos
normalmente abertos (NA), um será utilizado para o intertravamento elétrico e o outroserá interligado ao CLP para realizar os intertravamentos lógicos necessários no
programa e também para geração de alarmes.
Para todos os exercícios com controle de motores, dado a sua grande utilização
atualmente, considerar a lista de atribuição com o uso do disjuntor motor.
Lista de atribu ição
Símbolo Operando DescriçãoS0 I 0.0 Off contato NF (normalmente fechado)S1 I 0.1 On contato NA (normal aberto)F3 I 0.2 Contato NA do disjuntor motorK1 Q 0.0 Contator do motor K1H1 Q 0.1 Sinalização de motor paradoH2 Q 0.2 Sinalização de motor em marcha
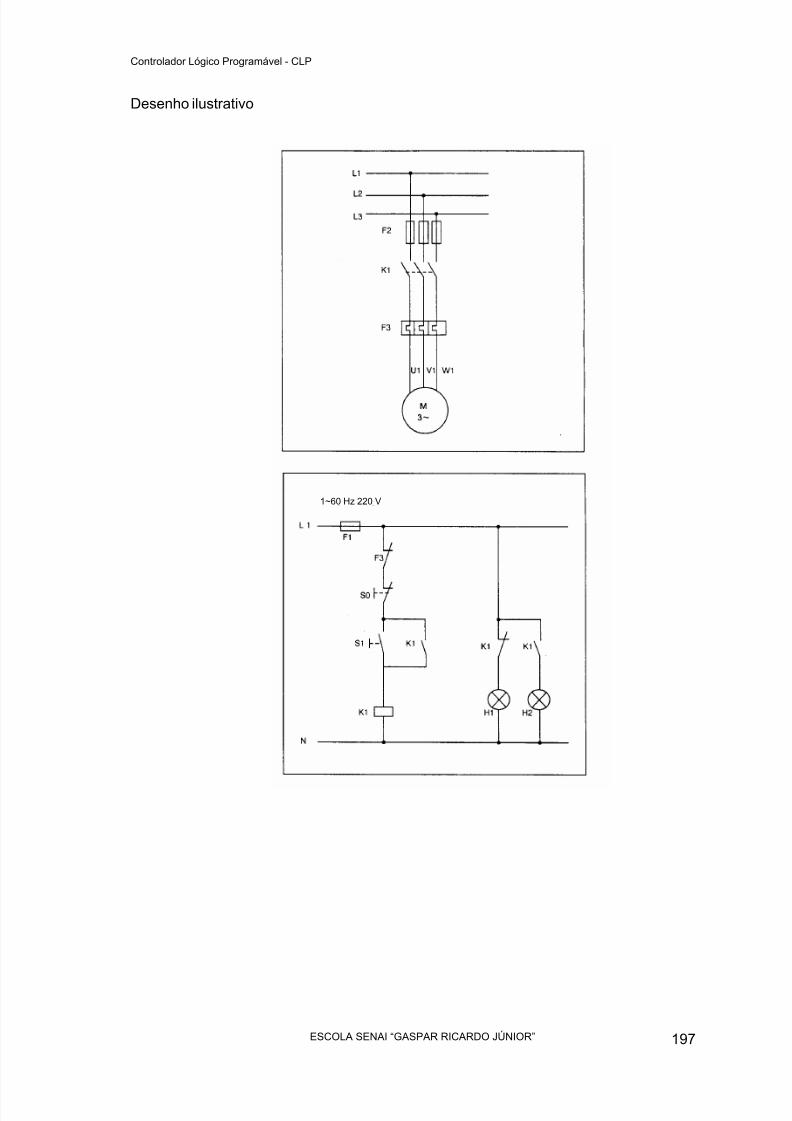
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 197/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 197
Desenho ilustrativo
1~60 Hz 220 V
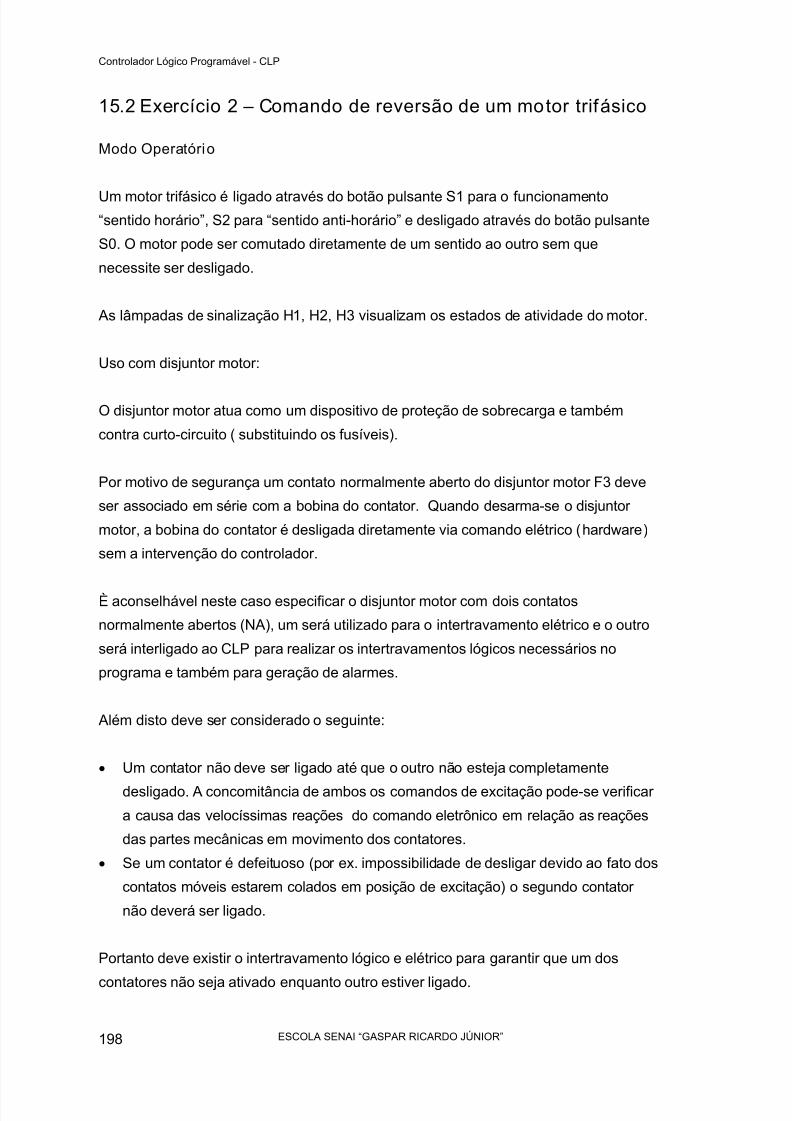
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 198/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 198
15.2 Exercício 2 – Comando de reversão de um motor trifásico
Modo Operatório
Um motor trifásico é ligado através do botão pulsante S1 para o funcionamento“sentido horário”, S2 para “sentido anti-horário” e desligado através do botão pulsante
S0. O motor pode ser comutado diretamente de um sentido ao outro sem que
necessite ser desligado.
As lâmpadas de sinalização H1, H2, H3 visualizam os estados de atividade do motor.
Uso com disjuntor motor:
O disjuntor motor atua como um dispositivo de proteção de sobrecarga e também
contra curto-circuito ( substituindo os fusíveis).
Por motivo de segurança um contato normalmente aberto do disjuntor motor F3 deve
ser associado em série com a bobina do contator. Quando desarma-se o disjuntor
motor, a bobina do contator é desligada diretamente via comando elétrico (hardware)
sem a intervenção do controlador.
È aconselhável neste caso especificar o disjuntor motor com dois contatos
normalmente abertos (NA), um será utilizado para o intertravamento elétrico e o outro
será interligado ao CLP para realizar os intertravamentos lógicos necessários no
programa e também para geração de alarmes.
Além disto deve ser considerado o seguinte:
• Um contator não deve ser ligado até que o outro não esteja completamente
desligado. A concomitância de ambos os comandos de excitação pode-se verificar
a causa das velocíssimas reações do comando eletrônico em relação as reações
das partes mecânicas em movimento dos contatores.
• Se um contator é defeituoso (por ex. impossibilidade de desligar devido ao fato dos
contatos móveis estarem colados em posição de excitação) o segundo contator
não deverá ser ligado.
Portanto deve existir o intertravamento lógico e elétrico para garantir que um dos
contatores não seja ativado enquanto outro estiver ligado.
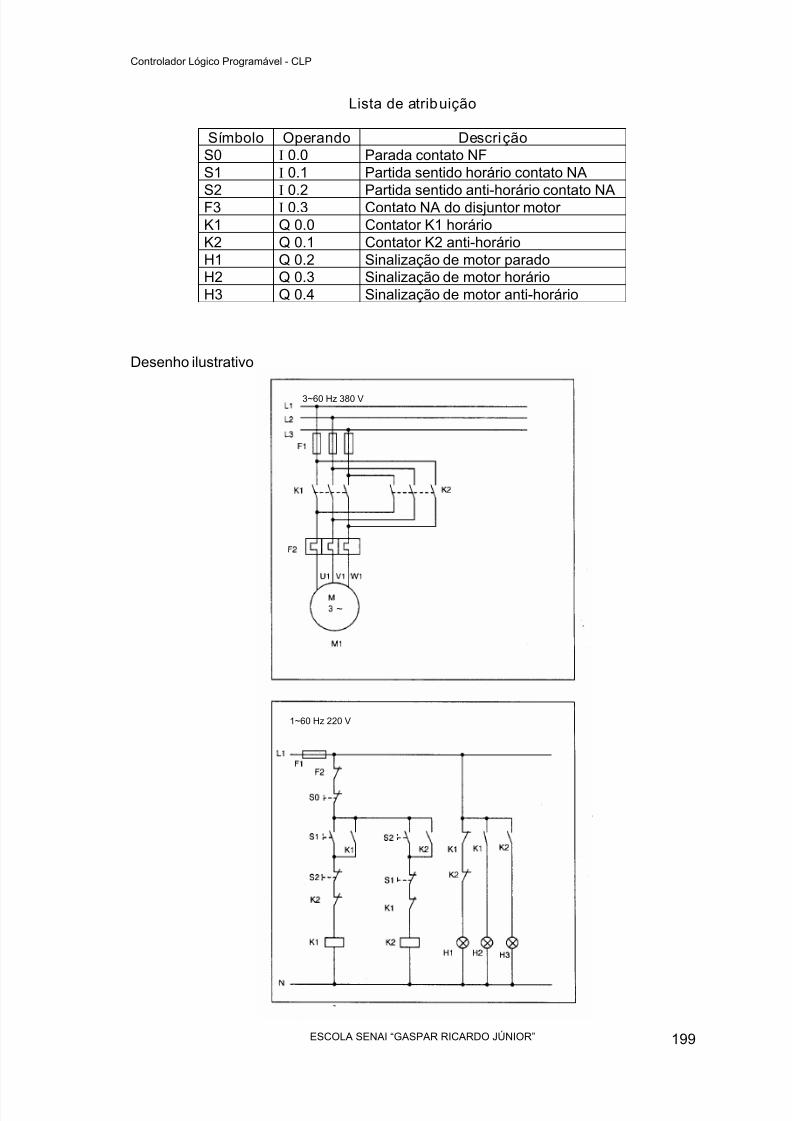
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 199/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 199
Lista de atribuição
Símbolo Operando DescriçãoS0 I 0.0 Parada contato NFS1 I 0.1 Partida sentido horário contato NA
S2I
0.2 Partida sentido anti-horário contato NAF3 I 0.3 Contato NA do disjuntor motorK1 Q 0.0 Contator K1 horárioK2 Q 0.1 Contator K2 anti-horárioH1 Q 0.2 Sinalização de motor paradoH2 Q 0.3 Sinalização de motor horárioH3 Q 0.4 Sinalização de motor anti-horário
Desenho ilustrativo
1~60 Hz 220 V
3~60 Hz 380 V
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 200/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 200
15.3 Exercício 3 – Comando de partida estrela-triângulo de ummotor trifásico
Modo Operatório
• Partida:
O botão pulsante S1 insere o contator principal K1 e K2 conectado para a ligação
estrela do motor. Nesta situação o motor está em funcionamento estrela.
• Comutação estrela - triângulo
Transcorrido o tempo de retardo de 10 segundos, o contator K2 é desligado e então
ligado o contator K3, mantendo o contator principal K1. Nesta situação o motor está em
funcionamento triângulo, ou seja, em regime.
• Parada
Apertando o botão pulsante S0 desliga-se o contator principal e o contator triângulo. Se
durante a partida em estrela S0 for acionado o circuito deve também ser desligado.
Uso com disjuntor motor:
O disjuntor motor atua como um dispositivo de proteção de sobrecarga e também
contra curto-circuito ( substituindo os fusíveis).
Por motivo de segurança um contato normalmente aberto do disjuntor motor F3 deve
ser associado em série com a bobina do contator. Quando desarma-se o disjuntor
motor, a bobina do contator é desligada diretamente via comando elétrico (hardware)
sem a intervenção do controlador.
È aconselhável neste caso especificar o disjuntor motor com dois contatos
normalmente abertos (NA), um será utilizado para o intertravamento elétrico e o outro
será interligado ao CLP para realizar os intertravamentos lógicos necessários no
programa e também para geração de alarmes.
Os contatores K2 e K3 devem ser intertravados lógica e eletricamente.
As lâmpadas de sinalização H1 e H2 sinalizam o estado de atividade do motor.
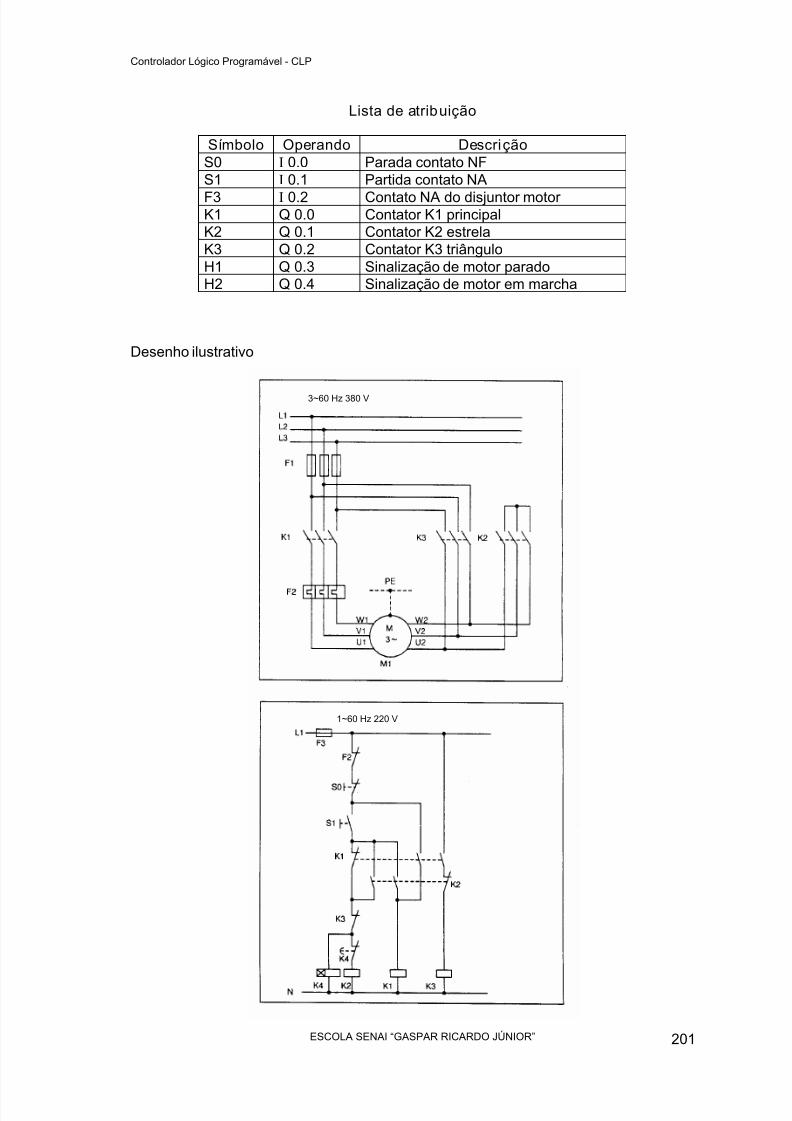
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 201/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 201
Lista de atribuição
Símbolo Operando DescriçãoS0 I 0.0 Parada contato NFS1 I 0.1 Partida contato NA
F3 I 0.2 Contato NA do disjuntor motorK1 Q 0.0 Contator K1 principalK2 Q 0.1 Contator K2 estrelaK3 Q 0.2 Contator K3 triânguloH1 Q 0.3 Sinalização de motor paradoH2 Q 0.4 Sinalização de motor em marcha
Desenho ilustrativo
3~60 Hz 380 V
1~60 Hz 220 V
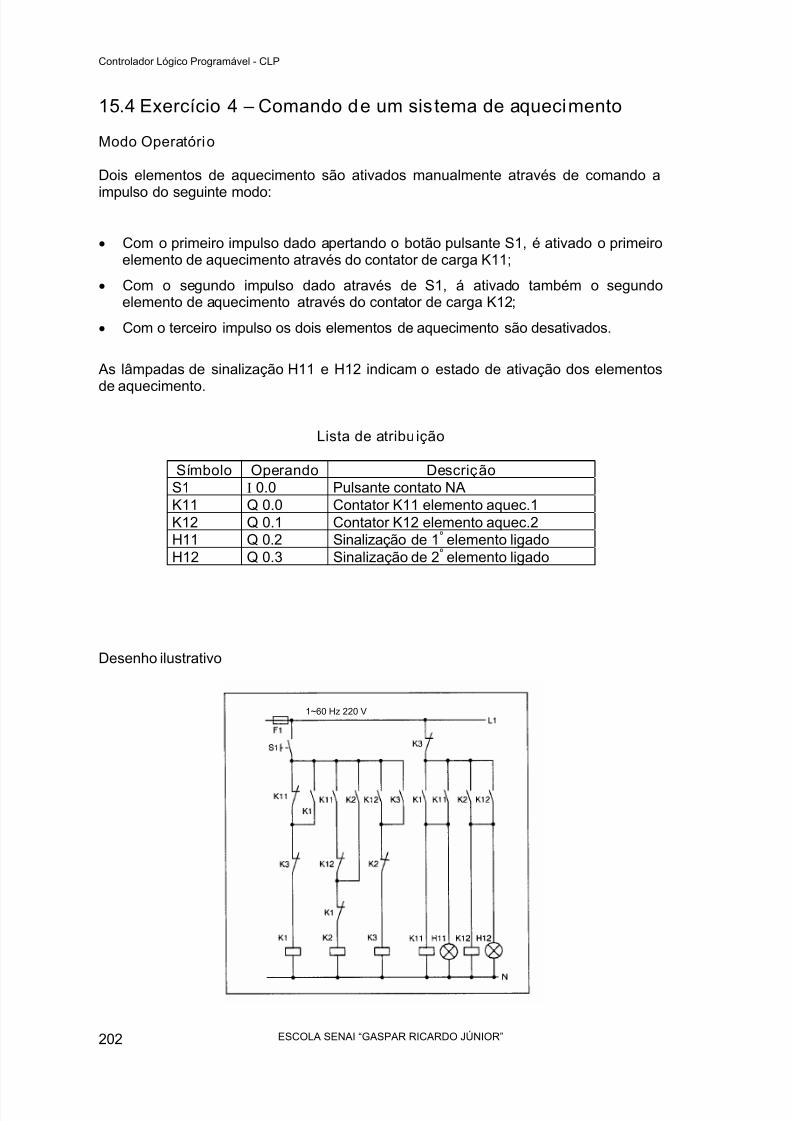
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 202/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 202
15.4 Exercício 4 – Comando de um sistema de aquecimento
Modo Operatório
Dois elementos de aquecimento são ativados manualmente através de comando a
impulso do seguinte modo:
• Com o primeiro impulso dado apertando o botão pulsante S1, é ativado o primeiroelemento de aquecimento através do contator de carga K11;
• Com o segundo impulso dado através de S1, á ativado também o segundoelemento de aquecimento através do contator de carga K12;
• Com o terceiro impulso os dois elementos de aquecimento são desativados.
As lâmpadas de sinalização H11 e H12 indicam o estado de ativação dos elementos
de aquecimento.
Lista de atribu ição
Símbolo Operando DescriçãoS1 I 0.0 Pulsante contato NAK11 Q 0.0 Contator K11 elemento aquec.1K12 Q 0.1 Contator K12 elemento aquec.2H11 Q 0.2 Sinalização de 1º elemento ligadoH12 Q 0.3 Sinalização de 2º elemento ligado
Desenho ilustrativo
1~60 Hz 220 V

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 203/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 203
15.5 Exercício 5 – Comando de um semáforo para pedestres
Modo Operatório
Na proximidade de uma passagem para pedestres encontra-se um semáforo.
Apertando o botão pulsante S1, o semáforo sinaliza, ao transcorrer um tempo pré-fixado e segundo uma seqüência já bem conhecida, vermelho para os veículos, verdepara os pedestres e vice-versa.
Neste exemplo as sinalizações para os motoristas são respectivamente 3 segundos oamarelo e 16 segundos o vermelho. A sinalização verde para os pedestres tem umaduração de 10 segundos. Quando não existirem pedestres o sinal verde para osmotoristas é a condição inicial.
Lista de atribuição
Símbolo Operando DescriçãoS1 I 0.0 Pulsante contato NAH5 Q 0.0 Lâmpada vermelha pedestresH4 Q 0.1 Lâmpada verde pedestresH3 Q 0.2 Lâmpada vermelha motoristaH2 Q 0.3 Lâmpada amarela motoristaH1 Q 0.4 Lâmpada verde motorista
Desenho ilustrativo
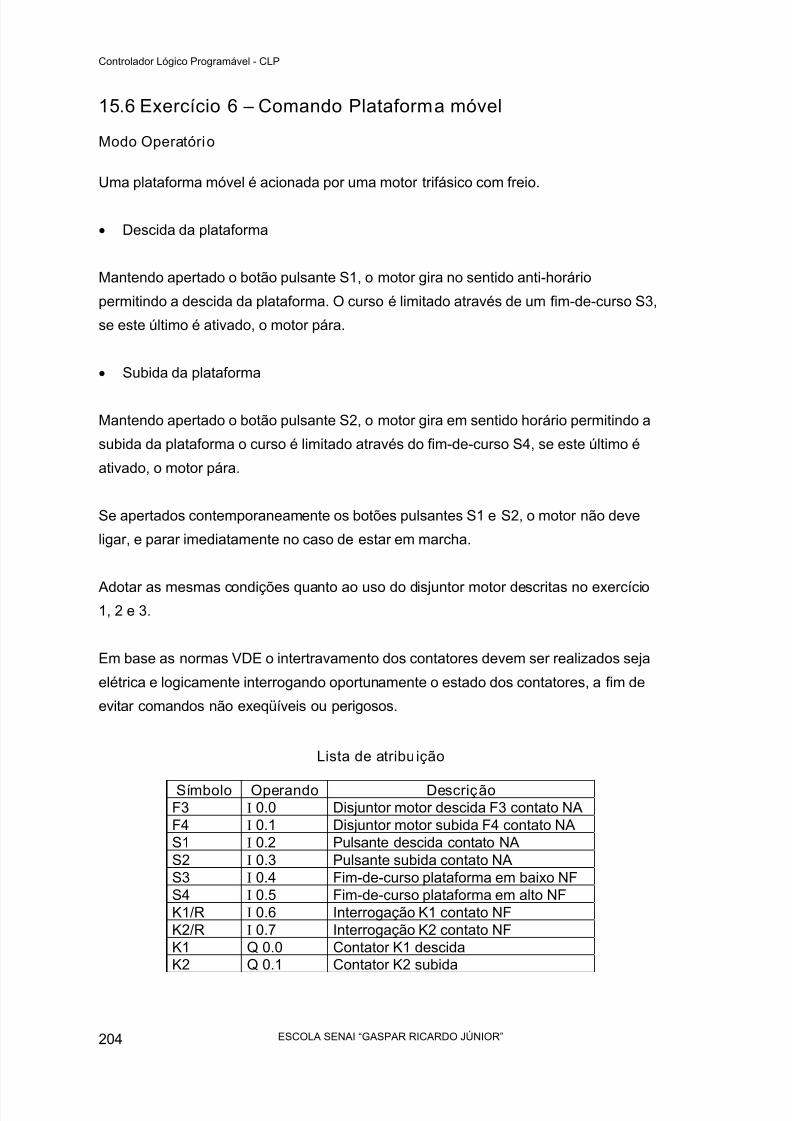
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 204/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 204
15.6 Exercício 6 – Comando Plataforma móvel
Modo Operatório
Uma plataforma móvel é acionada por uma motor trifásico com freio.
• Descida da plataforma
Mantendo apertado o botão pulsante S1, o motor gira no sentido anti-horário
permitindo a descida da plataforma. O curso é limitado através de um fim-de-curso S3,
se este último é ativado, o motor pára.
• Subida da plataforma
Mantendo apertado o botão pulsante S2, o motor gira em sentido horário permitindo a
subida da plataforma o curso é limitado através do fim-de-curso S4, se este último é
ativado, o motor pára.
Se apertados contemporaneamente os botões pulsantes S1 e S2, o motor não deve
ligar, e parar imediatamente no caso de estar em marcha.
Adotar as mesmas condições quanto ao uso do disjuntor motor descritas no exercício1, 2 e 3.
Em base as normas VDE o intertravamento dos contatores devem ser realizados seja
elétrica e logicamente interrogando oportunamente o estado dos contatores, a fim de
evitar comandos não exeqüíveis ou perigosos.
Lista de atribu ição
Símbolo Operando DescriçãoF3 I 0.0 Disjuntor motor descida F3 contato NAF4 I 0.1 Disjuntor motor subida F4 contato NAS1 I 0.2 Pulsante descida contato NAS2 I 0.3 Pulsante subida contato NAS3 I 0.4 Fim-de-curso plataforma em baixo NFS4 I 0.5 Fim-de-curso plataforma em alto NFK1/R I 0.6 Interrogação K1 contato NFK2/R I 0.7 Interrogação K2 contato NFK1 Q 0.0 Contator K1 descidaK2 Q 0.1 Contator K2 subida
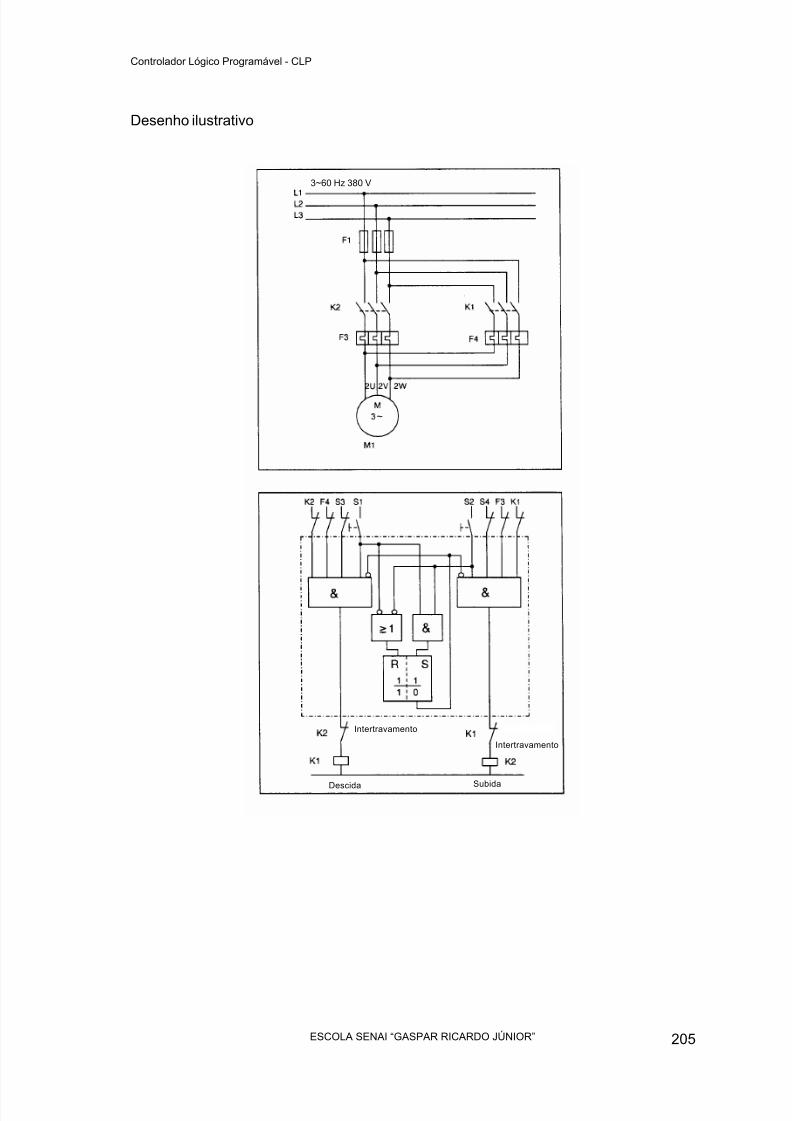
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 205/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 205
Desenho ilustrativo
Intertravamento
Intertravamento
Descida Subida
3~60 Hz 380 V
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 206/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 206
15.7 Exercício 7 – Comando furadeira com grade de proteção
Modo Operatório
Uma furadeira deve funcionar seja em automático que em manual.
• Funcionamento em manual
Os atuadores podem ser ativados individualmente através dos botões pulsantes. Com
o mandril ligado ou desligado deve ser possível subir ou abaixá-lo, escolhendo assim
livremente a profundidade do furo. (o fim-de-curso S2 não possui nenhum efeito)
• Funcionamento em Automático
Depois do comando de partida é fechada a grade de proteção e ativado o dispositivo
para a fixação da peça. Com esta operação são ativados os três fim-de-curso S3, S5 e
S6 que permitem o acionamento do mandril (motor M1). Somente quando o mandril
alcançou uma velocidade suficiente elevada ( tempo de espera de 3 segundos), é
ativada a descida do mandril e inicia a operação de furar.
Quando é alcançado a profundidade do furo desejada, o fim-de-curso S2 é acionado e
o mandril sobe. Depois de ter alcançado o ponto máximo superior, através do fim-de-curso S1 são desativados seja o motor que levanta o mandril (motor M2) que o
acionamento do mandril (motor M1). O dispositivo para a fixação da peça e a grade de
proteção são desativados.
Com o botão pulsante de parada é possível interromper a operação.
Em automático, ao comando do dispositivo para a fixação da peça e a grade de
proteção, é colocado em tempo de supervisão de 3 segundos, transcorrido este tempo
se acende a lâmpada de sinalização H1.
Adotar as mesmas condições quanto ao uso do disjuntor motor descritas no exercício
1, 2 e 3, apenas o intertravamento elétrico.
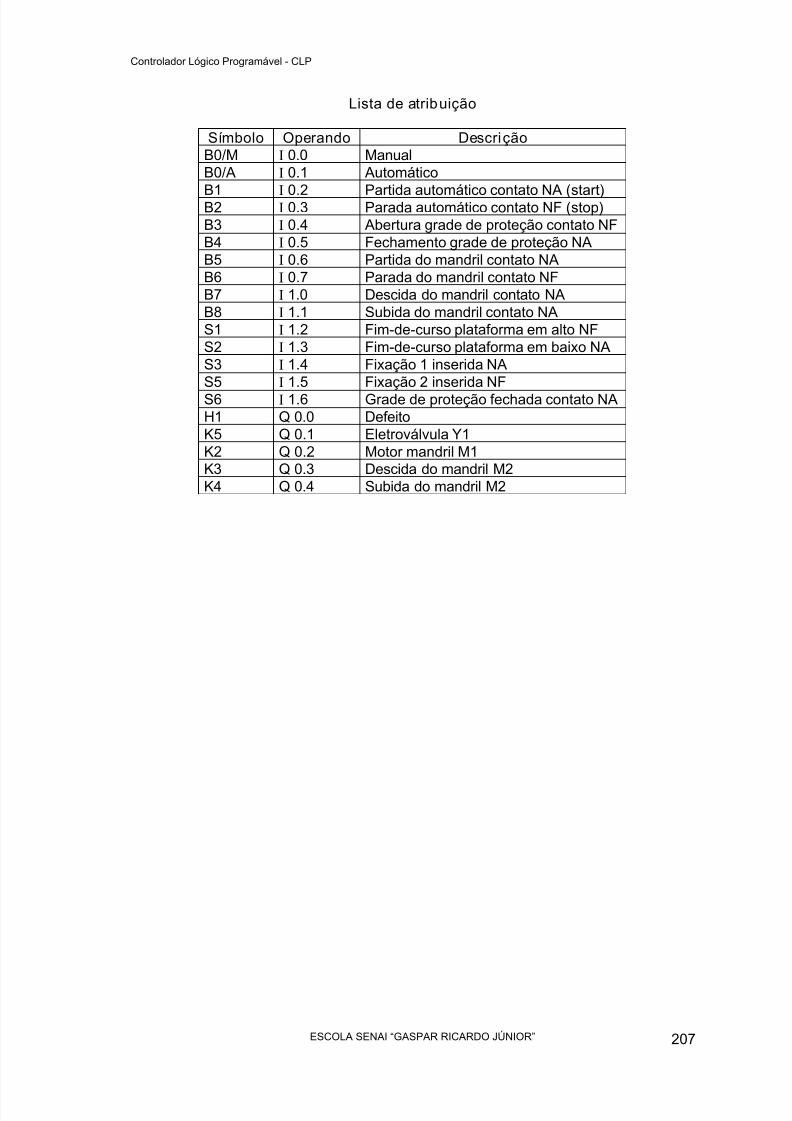
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 207/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 207
Lista de atribuição
Símbolo Operando DescriçãoB0/M I 0.0 ManualB0/A I 0.1 Automático
B1I
0.2 Partida automático contato NA (start)B2 I 0.3 Parada automático contato NF (stop)B3 I 0.4 Abertura grade de proteção contato NFB4 I 0.5 Fechamento grade de proteção NAB5 I 0.6 Partida do mandril contato NAB6 I 0.7 Parada do mandril contato NFB7 I 1.0 Descida do mandril contato NAB8 I 1.1 Subida do mandril contato NAS1 I 1.2 Fim-de-curso plataforma em alto NFS2 I 1.3 Fim-de-curso plataforma em baixo NAS3 I 1.4 Fixação 1 inserida NAS5 I 1.5 Fixação 2 inserida NFS6 I 1.6 Grade de proteção fechada contato NAH1 Q 0.0 DefeitoK5 Q 0.1 Eletroválvula Y1K2 Q 0.2 Motor mandril M1K3 Q 0.3 Descida do mandril M2K4 Q 0.4 Subida do mandril M2
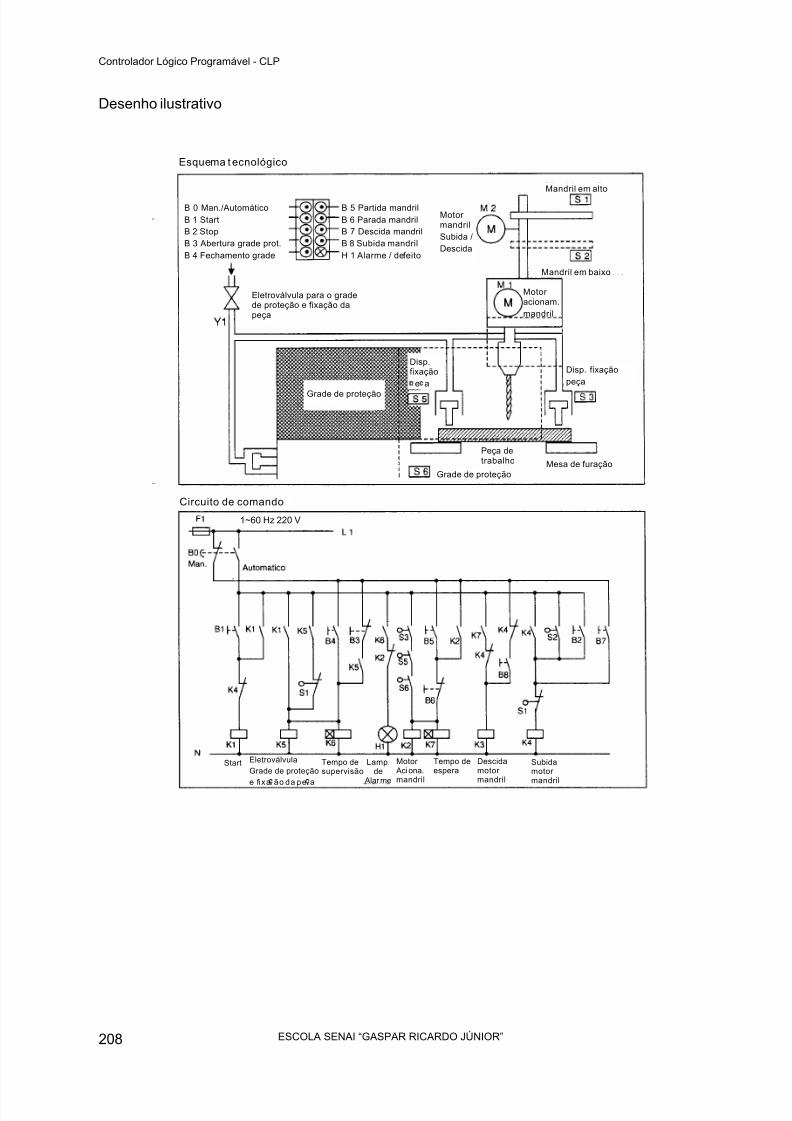
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 208/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 208
Desenho ilustrativo
Esquema t ecnológico
B 0 Man./Automático
B 1 Start B 2 StopB 3 Abertura grade prot.
B 4 Fechamento grade
B 5 Partida mandril
B 6 Parada mandrilB 7 Descida mandrilB 8 Subida mandril
H 1 Alarme / defeito
MotormandrilSubida /Descida
Mandril em alto
Mandril em baixo
Motoracionam.mandril
Eletroválvula para o gradede proteção e fixação dapeça
Grade de proteção
Disp.fixação
e a
Disp. fixaçãopeça
Peça detrabalho
Grade de proteção
Circuito de comando
Mesa de furação
Start Eletroválvula
Grade de proteção
e fixa ão da pe a
Tempo desupervisão
Lamp.de
Alarme
Motor Aciona.mandril
Tempo deespera
Descidamotormandril
Subidamotormandril
1~60 Hz 220 V
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 209/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 209
16. Parte Prática –
Avançada
Utilizando o software de programação STEP 7-Micro/WIN 32, elaborar os programas
de acordo com o modo operatório e a lista de atribuição dos operando de cada
exercício.
16.1 Exercício 1AV – Planta de enchimento de reservatórios
Modo Operatório
Uma planta de enchimento é composta de três reservatórios, cada um dos quais é
dotado de um contato normalmente fechado que sinaliza quando o reservatório é cheio
(S1, S3 e S5) e de um contato normalmente aberto que sinaliza quando o reservatório
é vazio (S2, S4 e S6).• Esvaziamento do reservatório
Os reservatórios são esvaziados manualmente. A seqüência é livre.
• Enchimento do reservatórios
Quando um reservatório foi completamente esvaziado o controle encarrega-se de
enche-lo automaticamente. É necessário, porém, observar:
- pode ser enchido somente um reservatório por vez. A eletroválvula de enchimento
correspondente (Y1, Y2 ou Y3) são acionadas do CLP. A fase de enchimento seinterrompe com a sinalização de reservatório cheio.
- Os reservatórios que são enchidos na mesma seqüência em que são esvaziados.
Se por exemplo os foram esvaziados os reservatórios 2-1-3 o enchimento terá de
manter a mesma seqüência.
Após realizar o programa com o controle de nível com os fins-de-curso, adaptar o
programa para receber entradas analógicas de transmissores de nível, sendo 0 volts
reservatório vazio e 10 volts reservatório cheio.
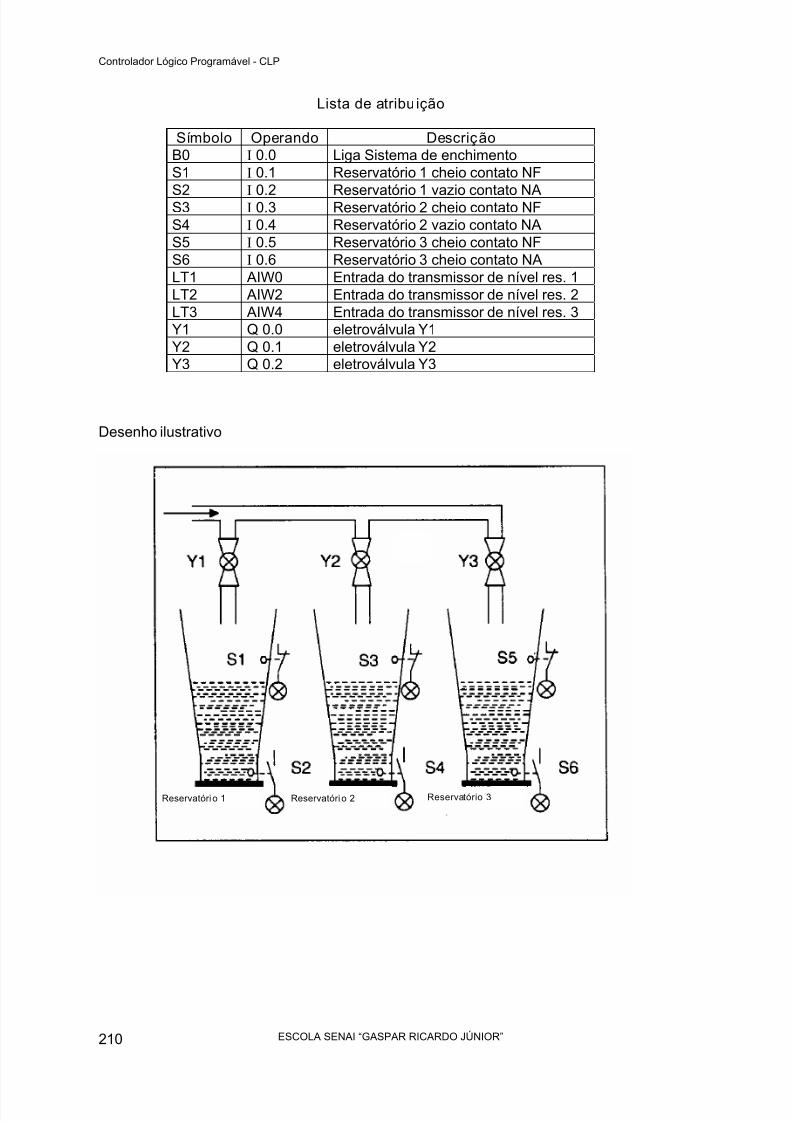
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 210/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 210
Lista de atribu ição
Símbolo Operando DescriçãoB0 I 0.0 Liga Sistema de enchimentoS1 I 0.1 Reservatório 1 cheio contato NF
S2I
0.2 Reservatório 1 vazio contato NAS3 I 0.3 Reservatório 2 cheio contato NFS4 I 0.4 Reservatório 2 vazio contato NAS5 I 0.5 Reservatório 3 cheio contato NFS6 I 0.6 Reservatório 3 cheio contato NALT1 AIW0 Entrada do transmissor de nível res. 1LT2 AIW2 Entrada do transmissor de nível res. 2LT3 AIW4 Entrada do transmissor de nível res. 3Y1 Q 0.0 eletroválvula Y1Y2 Q 0.1 eletroválvula Y2Y3 Q 0.2 eletroválvula Y3
Desenho ilustrativo
Reservatóri o 1 Reservatóri o 2 Reservatório 3
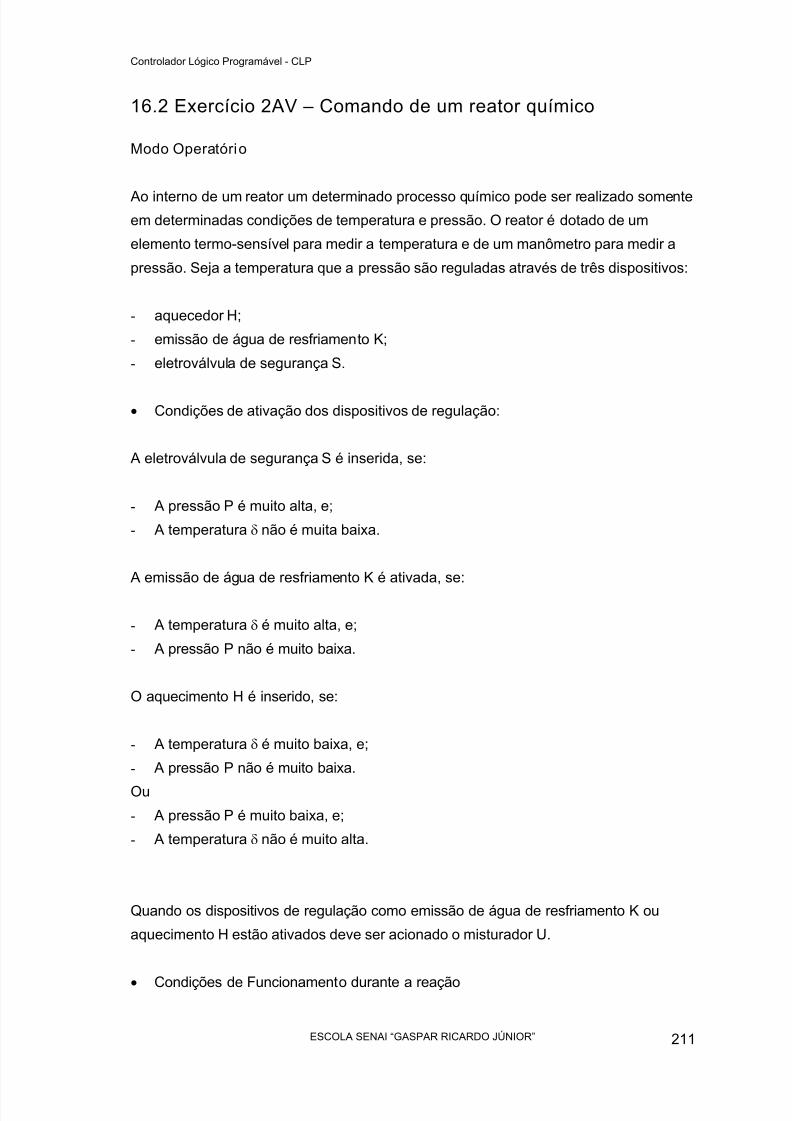
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 211/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 211
16.2 Exercício 2AV – Comando de um reator químico
Modo Operatório
Ao interno de um reator um determinado processo químico pode ser realizado somenteem determinadas condições de temperatura e pressão. O reator é dotado de um
elemento termo-sensível para medir a temperatura e de um manômetro para medir a
pressão. Seja a temperatura que a pressão são reguladas através de três dispositivos:
- aquecedor H;
- emissão de água de resfriamento K;
- eletroválvula de segurança S.
• Condições de ativação dos dispositivos de regulação:
A eletroválvula de segurança S é inserida, se:
- A pressão P é muito alta, e;
- A temperatura δ não é muita baixa.
A emissão de água de resfriamento K é ativada, se:
- A temperatura δ é muito alta, e;
- A pressão P não é muito baixa.
O aquecimento H é inserido, se:
- A temperatura δ é muito baixa, e;
- A pressão P não é muito baixa.
Ou
- A pressão P é muito baixa, e;
- A temperatura δ não é muito alta.
Quando os dispositivos de regulação como emissão de água de resfriamento K ou
aquecimento H estão ativados deve ser acionado o misturador U.
• Condições de Funcionamento durante a reação

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 212/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 212
As três condições de funcionamento durante a reação são:
- Partida (pressão P muito baixa);
- Funcionamento normal ( pressão P normal);
- Alarme (pressão P muito alta).
São sinalizadas através de lâmpadas.
Após realizar o programa com o controle de temperatura e pressão com os fins-de-
curso, adaptar o programa para receber entradas analógicas de transmissores de
temperatura e pressão, sendo 1 volt temperatura e pressão muito baixa e 9 volts
temperatura e pressão muito alta.
Substituir o controle on-off do sistema de aquecimento por sistema de chave estática
controlado por uma saída analógica.
Lista de atribu ição
Símbolo Operando DescriçãoPa I 0.0 Pressão muito alta contato NFPb I 0.1 Pressão muito baixa contato NFTa I 0.2 Temperatura muito alta contato NFTb I 0.3 Temperatura muito baixa contato NFPT AIW0 Transmissor de pressãoTT AIW2 Transmissor de temperaturaU Q 0.0 Misturador US Q 0.1 Eletroválvula de segurançaK Q 0.2 Emissão de água de resfriamentoTC AQW0 Controle de aquecimentoH Q 0.3 Aquecimento HH1 As Q 0.4 Sinalização de partidaH2 Sn Q 0.5 Sinalização de funcionamentoH3 Sg Q 0.6 Sinalização de alta pressão
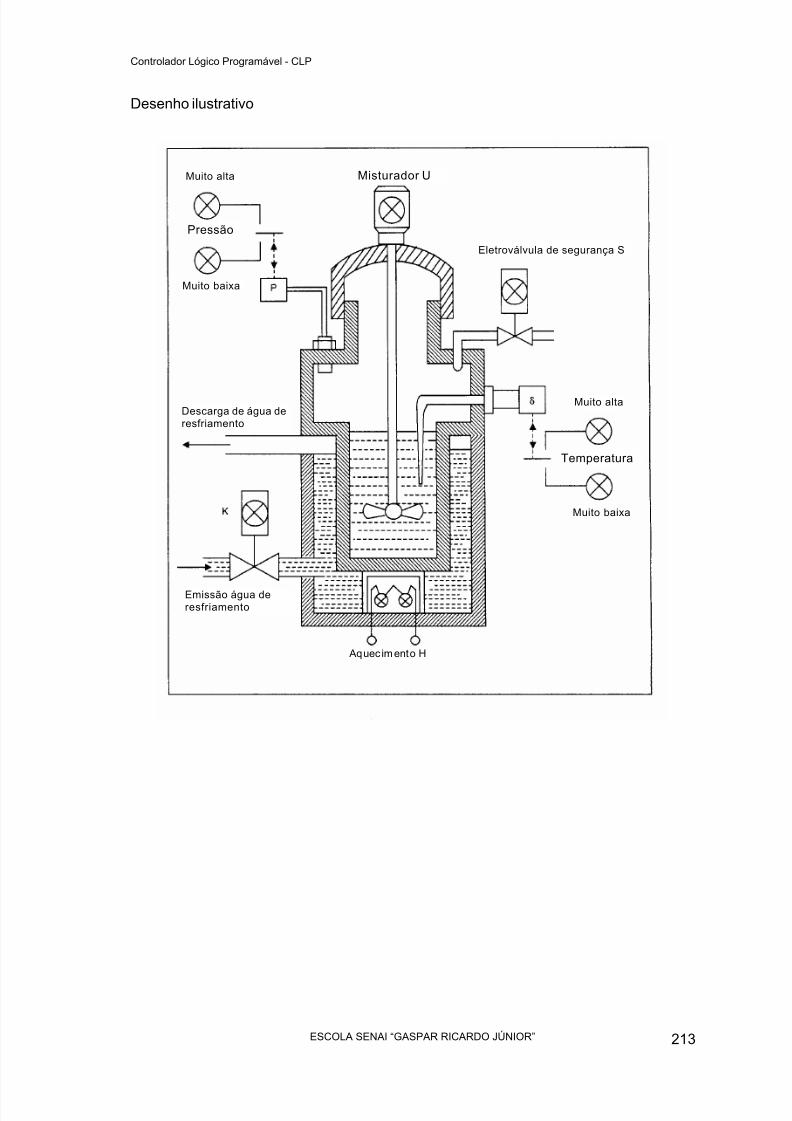
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 213/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 213
Desenho ilustrativo
Pressão
Muito alta
Muito baixa
Misturador U
Eletroválvula de segurança S
Descarga de água deresfriamento
Temperatura
Muito alta
Muito baixa
Emissão água deresfriamento
Aquecimento H
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 214/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 214
16.3 Exercício 3AV – Planta de bombeamento de água
Modo Operatório
Um tanque de recolhimento de água para tratamento é esvaziado por meio de duas
bombas.
• Bomba 1
Partida:
A bomba é ligada manualmente através do botão pulsante S2 ou automaticamente,
através da auto-retenção, no momento no qual a água supera o nível desejado einsere o fim-de-curso da bóia B1.
Parada
Quando o nível da água desce abaixo do fim-de-curso da bóia B0 a bomba é
desativada automaticamente. É possível desativar a bomba em qualquer momento
através do botão pulsante S1 ou através do desarme do disjuntor motor F1.
• Bomba 2
Partida:
A bomba é ligada manualmente através do botão pulsante S4 ou automaticamente,
através da auto-retenção, no momento no qual a água supera o nível desejado e
insere o fim-de-curso da bóia B4.
Parada
Quando o nível da água desce abaixo do fim-de-curso da bóia B3 a bomba é
desativada automaticamente. É possível desativar a bomba em qualquer momento
através do botão pulsante S3 ou através do desarme do disjuntor motor F2.
As lâmpadas de sinalização de H0 a H1 sinalizam as condições de funcionamento das
bombas.
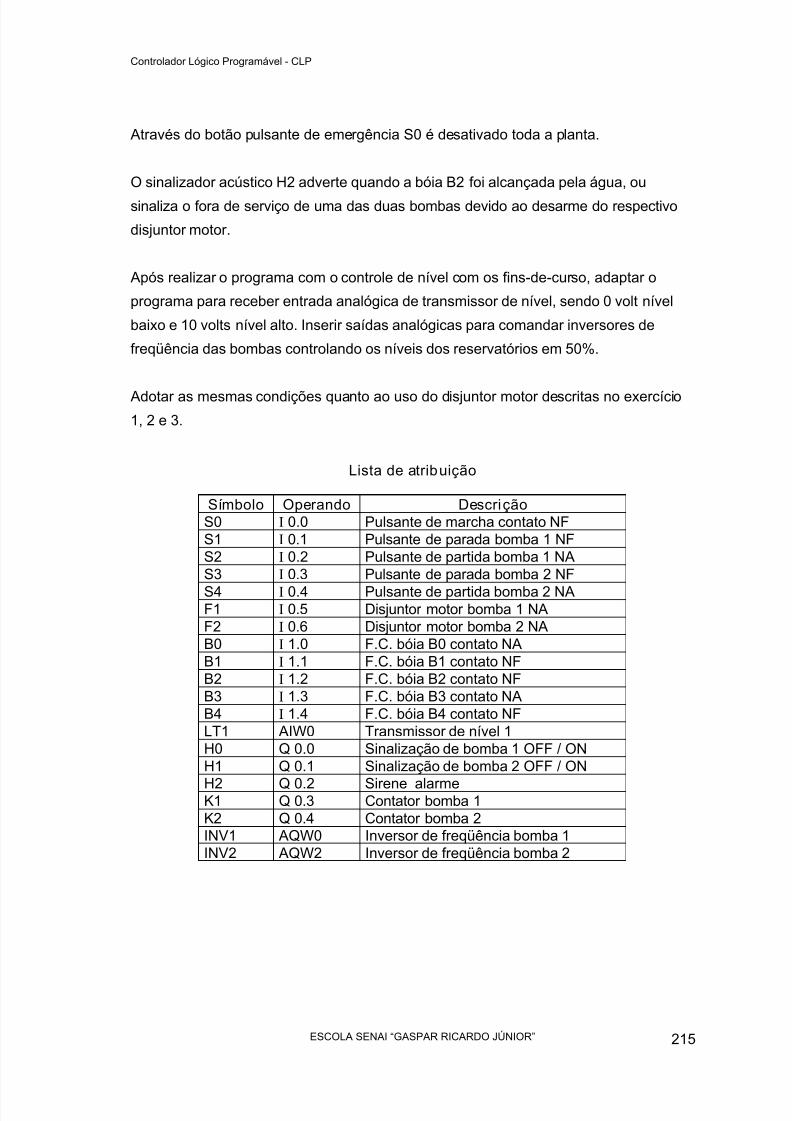
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 215/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 215
Através do botão pulsante de emergência S0 é desativado toda a planta.
O sinalizador acústico H2 adverte quando a bóia B2 foi alcançada pela água, ou
sinaliza o fora de serviço de uma das duas bombas devido ao desarme do respectivo
disjuntor motor.
Após realizar o programa com o controle de nível com os fins-de-curso, adaptar o
programa para receber entrada analógica de transmissor de nível, sendo 0 volt nível
baixo e 10 volts nível alto. Inserir saídas analógicas para comandar inversores de
freqüência das bombas controlando os níveis dos reservatórios em 50%.
Adotar as mesmas condições quanto ao uso do disjuntor motor descritas no exercício1, 2 e 3.
Lista de atribuição
Símbolo Operando DescriçãoS0 I 0.0 Pulsante de marcha contato NFS1 I 0.1 Pulsante de parada bomba 1 NFS2 I 0.2 Pulsante de partida bomba 1 NAS3 I 0.3 Pulsante de parada bomba 2 NF
S4 I 0.4 Pulsante de partida bomba 2 NAF1 I 0.5 Disjuntor motor bomba 1 NAF2 I 0.6 Disjuntor motor bomba 2 NAB0 I 1.0 F.C. bóia B0 contato NAB1 I 1.1 F.C. bóia B1 contato NFB2 I 1.2 F.C. bóia B2 contato NFB3 I 1.3 F.C. bóia B3 contato NAB4 I 1.4 F.C. bóia B4 contato NFLT1 AIW0 Transmissor de nível 1H0 Q 0.0 Sinalização de bomba 1 OFF / ONH1 Q 0.1 Sinalização de bomba 2 OFF / ON
H2 Q 0.2 Sirene alarmeK1 Q 0.3 Contator bomba 1K2 Q 0.4 Contator bomba 2INV1 AQW0 Inversor de freqüência bomba 1INV2 AQW2 Inversor de freqüência bomba 2
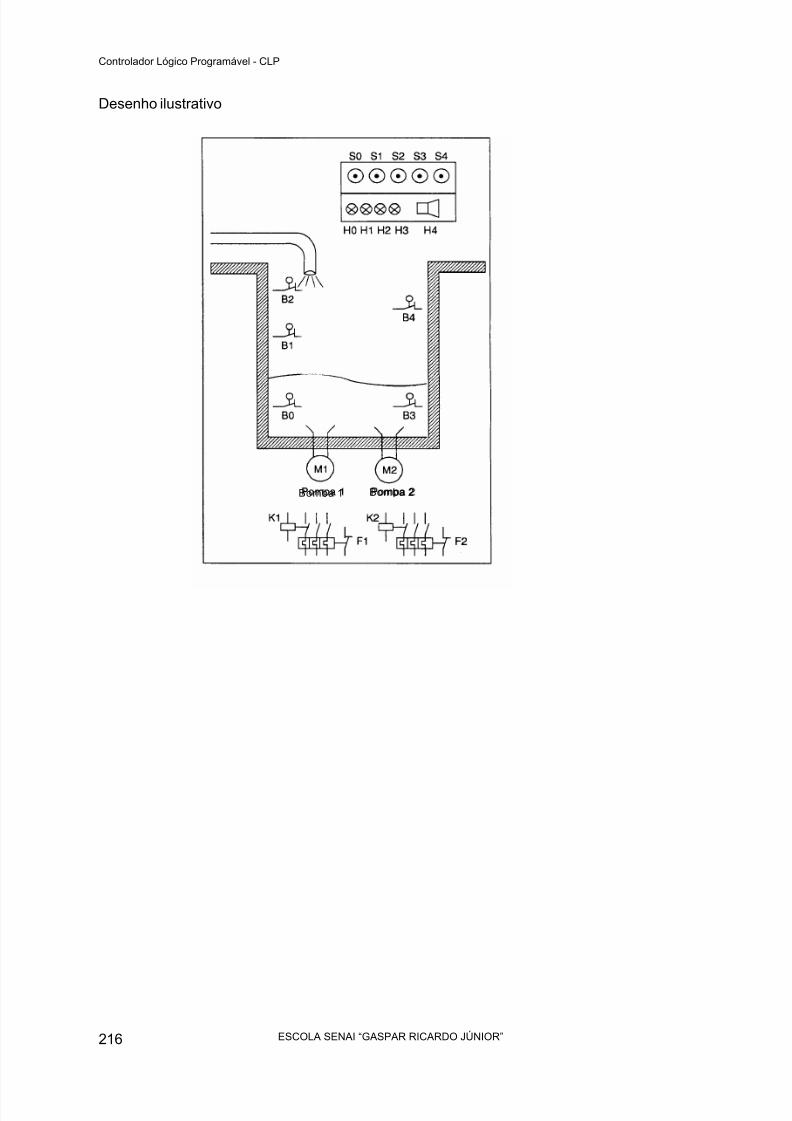
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 216/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 216
Bomba 1 Bomba 2
Desenho ilustrativo
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 217/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 217
16.4 Exercício 4AV – Carregamentos automático de vagões
Modo Operatório
O material que foi colocado no silo deve ser carregado nos vagões através de correias
transportadoras. A partida do controle é dada acionando o botão pulsante S1 (NA) que
faz acender a lâmpada de sinalização H1, já o botão pulsante S2 (NF) desativa o
comando.
Depois que o controle partiu apertando o botão pulsante S1, o processo de
carregamento se desenvolve do seguinte modo:
• Correia transportadora
A correia transportadora é colocada em funcionamento excitando o contator do motor
K1 quando o vagão foi posicionado para o carregamento ( fim-de-curso S3 ativo). A
correia pára se, em até 20 segundos da partida da correia, o vagão sucessivo não
alcançou a posição de carregamento.
• Válvula de descarregamento do reservatório
A válvula de descarga Y1 se abre quando o motor da correia transportadora é emfuncionamento e um vagão vazio é posicionado para o carregamento. A válvula de
descarga se fecha quando é alcançado o peso desejado na balança B1. O comando
de abertura e fechamento da válvula de descarga fica válido até que esta se posicione
como solicitado.
• Dispositivo de fixação
O dispositivo de fixação Y2 abre-se somente 10 segundos depois da sinalização de
vagão cheio e válvula de descarga fechada em modo que o material que ficou na
correia transportadora possa ser ainda despejado no vagão . O dispositivo de fixação
fecha-se quando o vagão cheio deixou a posição de carregamento e o contato do fim-
de-curso abriu-se.
Quando o vagão sucessivo alcança a posição de carregamento o ciclo acima descrito
se repete até que o controle é desativado através do botão pulsante S2.
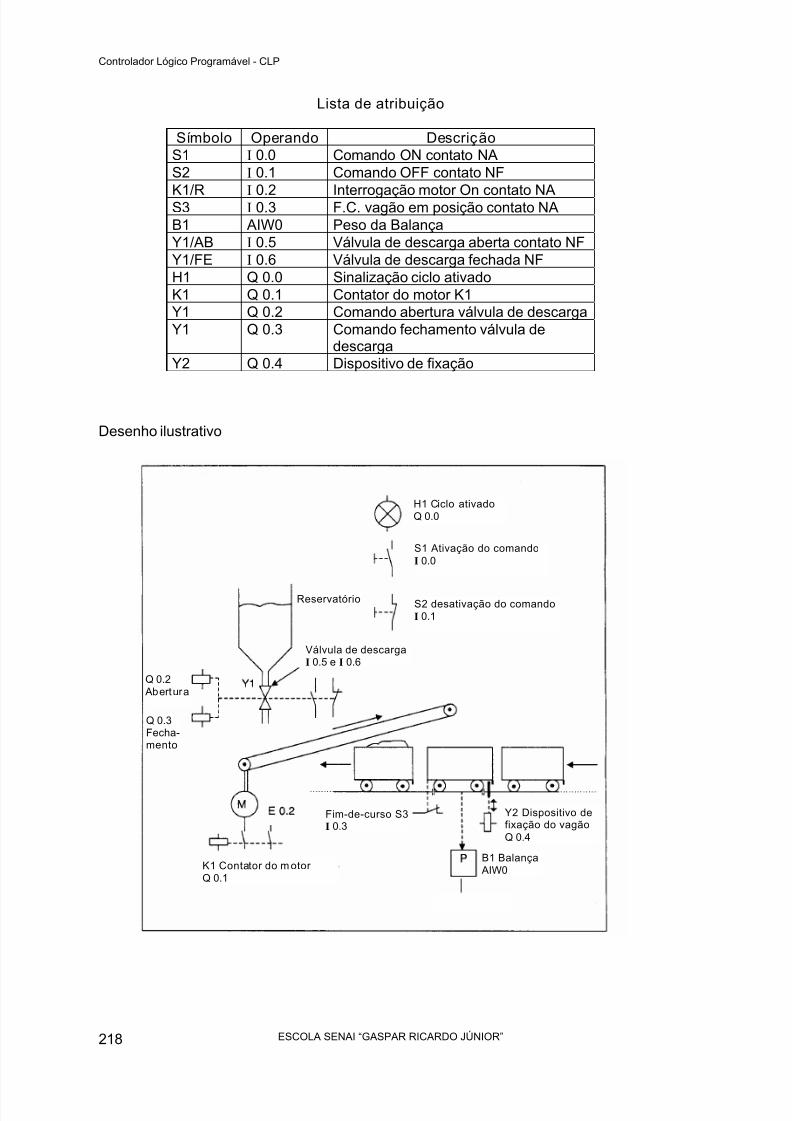
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 218/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 218
Lista de atribuição
Símbolo Operando DescriçãoS1 I 0.0 Comando ON contato NAS2 I 0.1 Comando OFF contato NF
K1/RI
0.2 Interrogação motor On contato NAS3 I 0.3 F.C. vagão em posição contato NAB1 AIW0 Peso da BalançaY1/AB I 0.5 Válvula de descarga aberta contato NFY1/FE I 0.6 Válvula de descarga fechada NFH1 Q 0.0 Sinalização ciclo ativadoK1 Q 0.1 Contator do motor K1Y1 Q 0.2 Comando abertura válvula de descargaY1 Q 0.3 Comando fechamento válvula de
descargaY2 Q 0.4 Dispositivo de fixação
Desenho ilustrativo
H1 Ciclo ativadoQ 0.0
S1 Ativação do comandoI 0.0
S2 desativação do comandoI 0.1
Reservatório
Válvula de descargaI 0.5 e I 0.6
Q 0.2 Abertura
Q 0.3Fecha-mento
K1 Contator do m otorQ 0.1
Fim-de-curso S3I 0.3
Y2 Dispositivo defixação do vagãoQ 0.4
B1 Balança AIW0
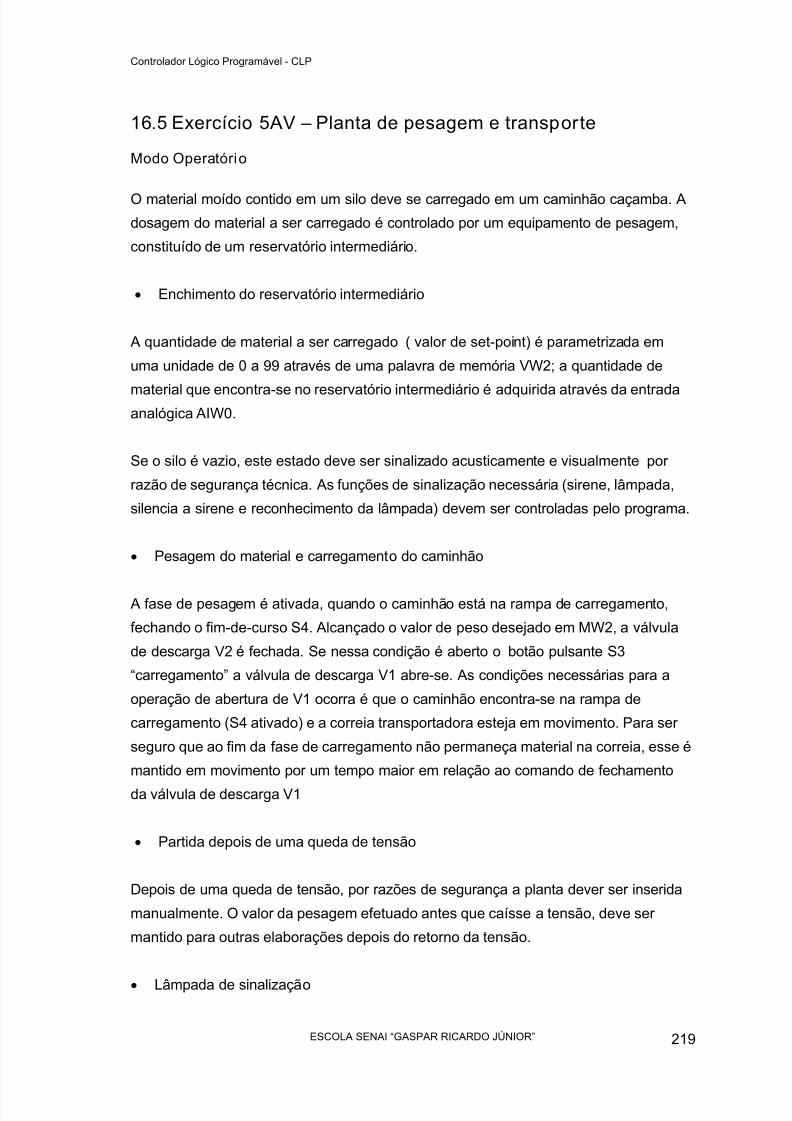
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 219/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 219
16.5 Exercício 5AV – Planta de pesagem e transporte
Modo Operatório
O material moído contido em um silo deve se carregado em um caminhão caçamba. Adosagem do material a ser carregado é controlado por um equipamento de pesagem,
constituído de um reservatório intermediário.
• Enchimento do reservatório intermediário
A quantidade de material a ser carregado ( valor de set-point) é parametrizada em
uma unidade de 0 a 99 através de uma palavra de memória VW2; a quantidade de
material que encontra-se no reservatório intermediário é adquirida através da entradaanalógica AIW0.
Se o silo é vazio, este estado deve ser sinalizado acusticamente e visualmente por
razão de segurança técnica. As funções de sinalização necessária (sirene, lâmpada,
silencia a sirene e reconhecimento da lâmpada) devem ser controladas pelo programa.
• Pesagem do material e carregamento do caminhão
A fase de pesagem é ativada, quando o caminhão está na rampa de carregamento,
fechando o fim-de-curso S4. Alcançado o valor de peso desejado em MW2, a válvula
de descarga V2 é fechada. Se nessa condição é aberto o botão pulsante S3
“carregamento” a válvula de descarga V1 abre-se. As condições necessárias para a
operação de abertura de V1 ocorra é que o caminhão encontra-se na rampa de
carregamento (S4 ativado) e a correia transportadora esteja em movimento. Para ser
seguro que ao fim da fase de carregamento não permaneça material na correia, esse é
mantido em movimento por um tempo maior em relação ao comando de fechamento
da válvula de descarga V1
• Partida depois de uma queda de tensão
Depois de uma queda de tensão, por razões de segurança a planta dever ser inserida
manualmente. O valor da pesagem efetuado antes que caísse a tensão, deve ser
mantido para outras elaborações depois do retorno da tensão.
• Lâmpada de sinalização
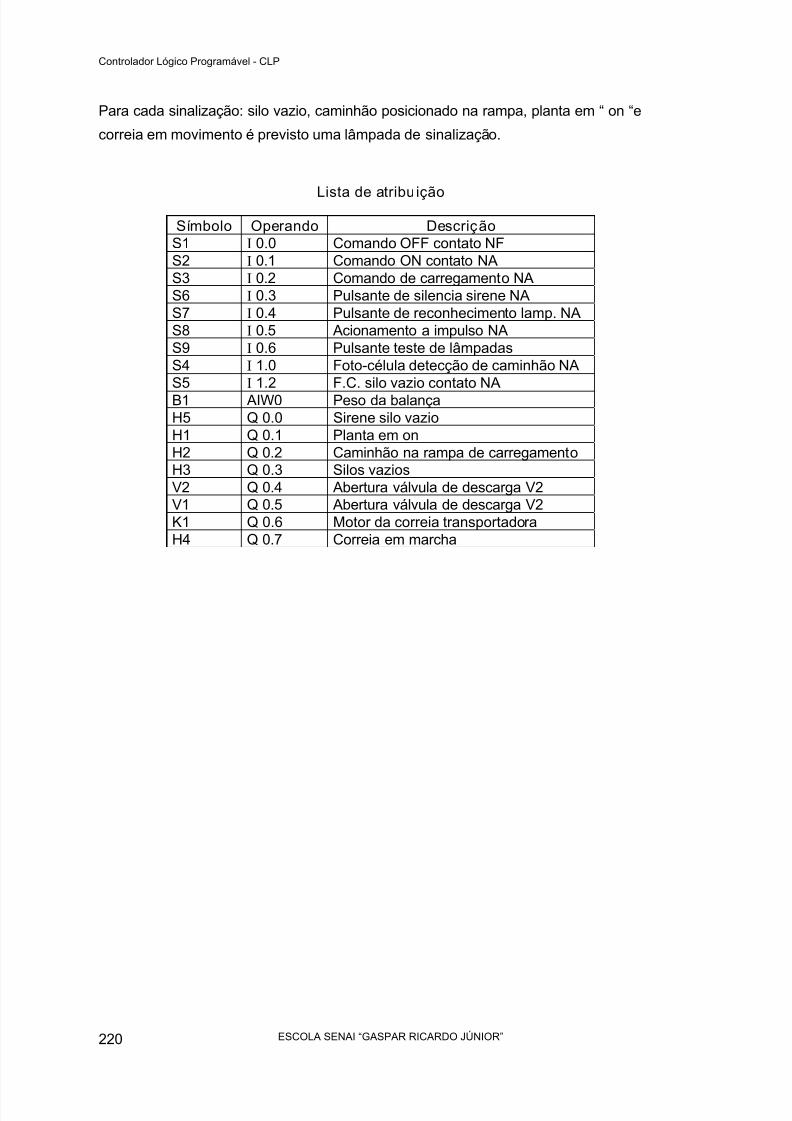
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 220/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 220
Para cada sinalização: silo vazio, caminhão posicionado na rampa, planta em “ on “e
correia em movimento é previsto uma lâmpada de sinalização.
Lista de atribu ição
Símbolo Operando DescriçãoS1 I 0.0 Comando OFF contato NFS2 I 0.1 Comando ON contato NAS3 I 0.2 Comando de carregamento NAS6 I 0.3 Pulsante de silencia sirene NAS7 I 0.4 Pulsante de reconhecimento lamp. NAS8 I 0.5 Acionamento a impulso NAS9 I 0.6 Pulsante teste de lâmpadasS4 I 1.0 Foto-célula detecção de caminhão NAS5 I 1.2 F.C. silo vazio contato NAB1 AIW0 Peso da balançaH5 Q 0.0 Sirene silo vazioH1 Q 0.1 Planta em onH2 Q 0.2 Caminhão na rampa de carregamentoH3 Q 0.3 Silos vaziosV2 Q 0.4 Abertura válvula de descarga V2V1 Q 0.5 Abertura válvula de descarga V2K1 Q 0.6 Motor da correia transportadoraH4 Q 0.7 Correia em marcha
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 221/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 221
Desenho ilustrativo
Planta em ON Pulsante ON
Caminhão na rampa Pulsante OFF
Silo vazio Silencia sirene
Reconhecimento lâmpadaSet-point peso
Conteúdo do r eservatóriointermediário
VW2
AIW0
Sirene H 5
Pulsante de carregamentoreservatório intermediário
Ac ionamento a impulso
Teste de lâmpadas
Fim-de-curso silo vazio S5
Válvula V2
Válvula V1
Silo
Reservatóriointermediário
Motor K1 H4Correia emMovimento
Foto-célula S4Caminhão na rampa
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 222/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 222
16.6 Exercício 6AV – Equipamento de lavagem química
Modo Operatório
Um equipamento de lavagem química elimina das placas de circuito impressoeventuais traços de pasta anti-oxidante usada na fase de soldagem dos componentes
A operação de colocar e retirar o cesto no gancho, onde as placas estão inseridas, é
executada manualmente.
Depois do comando ON (botão pulsante S1), o cesto desce na vasca de imersão por
três vezes consecutivas e fica a cada vez 10 segundos. Sucessivamente o cesto pode
ser retirado do gancho e, se desejado, pode-se coloca-lo de novo no gancho. Através
do botão pulsante S1 pode ser ativado um sucessivo processo de lavagem. Uma
lâmpada de sinalização H1 sinaliza o funcionamento automático.
Lista de atribu ição
Símbolo Operando DescriçãoS1 I 0.1 Pulsante ON contato NAS2 I 0.2 F.C. cesto alto contato NFS3 I 0.3 F.C. cesto baixo contato NF
M1 Q 0.0 Motor descidaM2 Q 0.1 Motor subidaH1 Q 0.2 Sinalização funcionamento automático
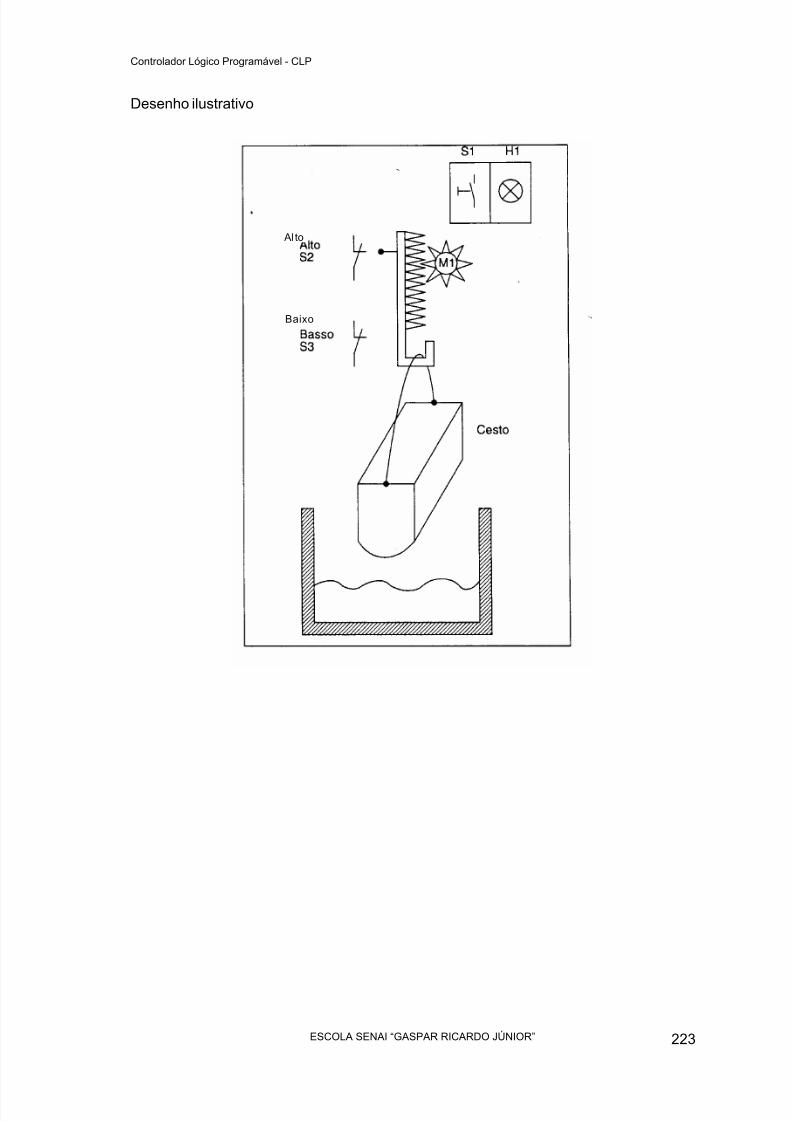
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 223/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 223
Desenho ilustrativo
Al to
Baixo
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 224/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 224
16.7 Exercício 7AV – Planta com misturador
Modo Operatório
Uma planta deve dosar oportunamente e misturar 4 líquidos diversos. Os líquidos
individualmente são adquiridos de 4 reservatórios separados, através do comando de 4
eletroválvulas (Y2...Y4). A bomba MOT2 bombeia os líquidos em um reservatório S
onde o motor MOT1 efetua a operação de misturar. Os sensores de proximidade
B1..B4, impostados como posição, dão o nível do reservatório S.
• Funcionamento
O processo de misturar inicia quando o operador aperta o botão pulsante de start S0. A
lâmpada de start H0 acende-se, a bomba MOT2 e o misturador MOT1 são ativados. Aeletroválvula Y1 abre-se e o liquido 1 é colocado no reservatório S até o nível atingir o
sensor B1. A eletroválvula Y1 fecha-se e a eletroválvula Y2 abre-se até o nível atingir o
sensor B2, e assim sucessivamente para os outros líquidos.
Quando fecha-se a eletroválvula Y4, a bomba MOT2 é desativada. Dez (10) segundos
depois do fechamento da eletroválvula Y4, apaga-se a lâmpada de start H0 e a
lâmpada de fim de ciclo H5 acende-se para sinalizar aos operadores o fim do
processo.
Depois de acender a lâmpada H5, o operador pode apertar o botão pulsante de stop
S5. O misturador MOT1 é desativado e a lâmpada H5 apaga-se; o reservatório pode
ser descarregado. Se a lâmpada H5 não acende-se, o botão pulsante de stop não é
habilitado.
A planta pára se é apertado o botão pulsante de marcha S6 ou atua um dos dois
disjuntores para motor F1 ou F2
Adotar as mesmas condições quanto ao uso do disjuntor motor descritas no exercício
1, 2 e 3.

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 225/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 225
Lista de atribuição
Símbolo Operando DescriçãoS0 I 0.1 Pulsante de start contato NAB1 I 0.2 Sensor de nível 1 contato NF
B2I
0.3 Sensor de nível 2 contato NFB3 I 0.4 Sensor de nível 3 contato NFB4 I 0.5 Sensor de nível 4 contato NFS5 I 0.6 Pulsante de stop contato NFS6 I 0.7 Marcha contato NFF1 I 1.0 Disjuntor motor M1 contato NAF2 I 1.1 Disjuntor motor M2 contato NAH0 Q 0.0 Planta ligadaY1 Q 0.1 Comando eletroválvula Y1Y2 Q 0.2 Comando eletroválvula Y2Y3 Q 0.3 Comando eletroválvula Y3Y4 Q 0.4 Comando eletroválvula Y4MOT1 Q 0.5 Comando misturador M1MOT2 Q 0.6 Comando bomba M2H5 Q 0.7 Lâmpada fim de ciclo
Desenho ilustrativo
Lâmpadade start
Lâmpadafim de ciclo
EmergênciaStart Stop
LíquidosReservatório
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 226/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 226
16.8 Exercício 8AV – TD 200 e Linearização analógica
Descrição
Criar um programa que leia um valor analógico de um canal de entrada analógica da
CPU S7-200 e fornece um valor de saída XQ compreendido entre uma área
determinada em escala do usuário. Os valores dos parâmetros devem ser atribuídos
no segmento de inicialização do programa. A formula de linearização compreende as
seguintes variáveis:
Ov = valor de saída linearizado
Iv = valor de entrada analógica
Osh = limite máximo da escala para o valor de saída linearizado
Osl = limite mínimo da escala para o valor de saída linearizadoIsh = limite máximo da escala para o valor de entrada analógica
Isl = limite mínimo da escala para o valor de entrada analógica
De acordo com a seguinte fórmula:
Ov = [(Osh - Osl) * (Iv - Isl) / (Ish - Isl)] + Osl
Modo Operatório
Um reservatório fechado contém um líquido o qual o nível atual deve ser visível em
qualquer momento no dispositivo de visualização(IHM TD 200). O programa deve
controlar o nível em relação aos limites especificados e se caso for alcançado o nível
máximo ou mínimo, é ativado um sinal com a IHM TD 200 e a válvula de enchimento
ou esvaziamento é fechada.
Um transdutor diferencial de pressão fornece uma tensão ( 1-5Vcc) a entrada
analógica que é proporcional ao nível do líquido no reservatório.
O módulo analógico EM235 deve ser calibrado em modo que, a um nível de 10 m, o
valor analógico atual de 5V é convertido no valor de 32000. A um nível de 0 m, o valor
atual de 1V deve ser convertido no valor 6400. O programa deve linearizar os valores
digitais convertidos em metros de altura.
O programa usuário deve verificar que os valores colocados não superem o limite
máximo de 10 m. Quando o líquido no reservatório alcança este nível, o programa

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 227/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 227
deve enviar a TD 200 a mensagem “Nível max. Alcançado” e imposta o bit de saída
para fechar a válvula de enchimento.
O líquido não deve descer abaixo do nível mínimo de 1 m. Se alcança este limite, o
programa deve enviar a TD 200 a mensagem “Nível min. Alcançado” e imposta o bit de
saída para fechar a válvula de esvaziamento.
A tensão para o indicador de nível do líquido deve ser gerada mediante um módulo de
saída analógico, escrevendo um valor digital correspondente na palavra de saída
analógica (AQW0)
O módulo de saída analógica transmite o nível do líquido (entre 0 m e 10 m) a uminstrumento de medição com a tensão compreendida entre 0 V e 10V. O display
analógico do instrumento de medição responde a tensão com um desvio proporcional
ao nível do líquido.
A fórmula executa a linearização de qualquer valor dado entre os pontos de escala
mínimo e máximo. Em particular, o programa deve receber a palavra analógica (AIW0)
e a escala, seja no TD 200 que no módulo de saída analógico. O programa lê antes de
tudo a AIW0 que é o valor compreendido entre 1V a 5V e o lineariza entre um valor de6400 e 32000. Tais valores são então linearizados a palavra de saída analógica
(AQW0) que tem um valor entre 0 e 32000. Sucessivamente, a AIW0 é linearizada ao
TD 200 que tem um valor de escala mínimo de 0 e máximo de 10.
O programa deve usar o TD 200 para visualizar a mensagem com o valor linearizado
do nível de líquido medido. O TD 200 visualiza além disto as mensagens quando são
alcançados os limites. O valor mínimo e máximo são codificados no bloco de dados
DB1 utilizado para iniciar o TD 200.
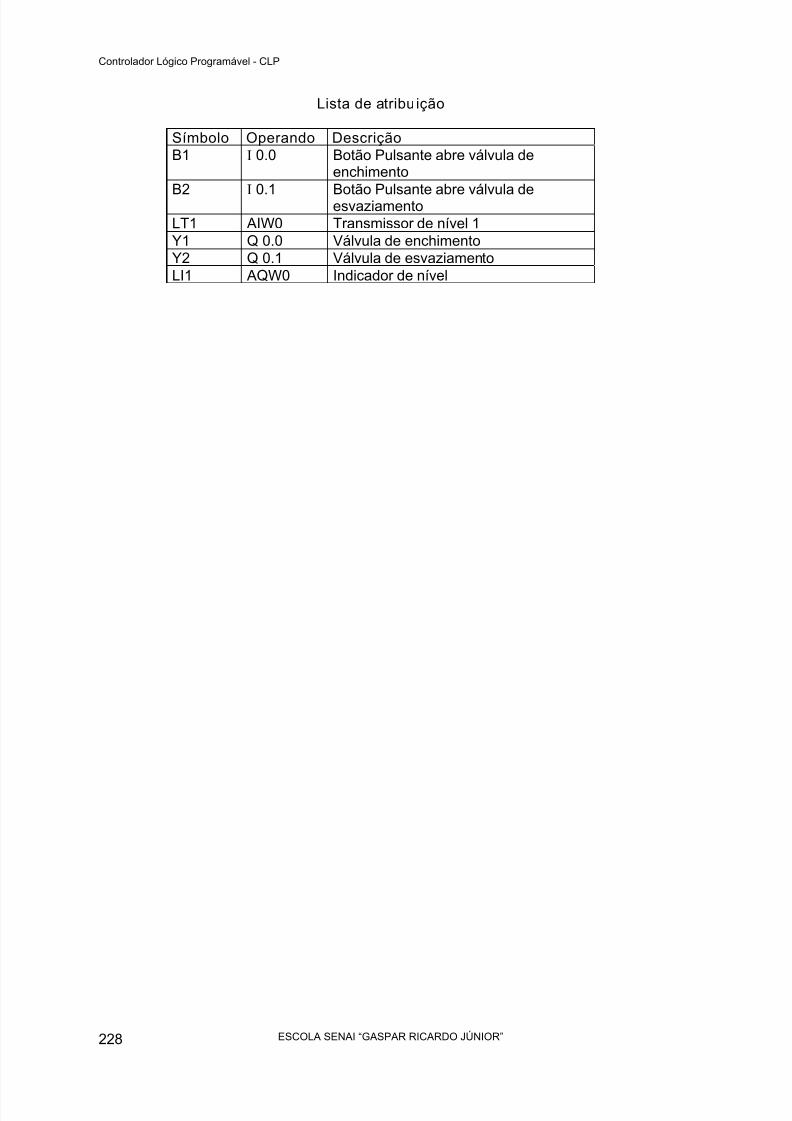
7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 228/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 228
Lista de atribu ição
Símbolo Operando DescriçãoB1 I 0.0 Botão Pulsante abre válvula de
enchimento
B2I
0.1 Botão Pulsante abre válvula deesvaziamentoLT1 AIW0 Transmissor de nível 1Y1 Q 0.0 Válvula de enchimentoY2 Q 0.1 Válvula de esvaziamentoLI1 AQW0 Indicador de nível

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 229/230
Controlador Lógico Programável - CLP
ESCOLA SENAI “GASPAR RICARDO JÚNIOR” 229
17. ReferênciasBibliográficas
Manual SIMATIC S7-200 Programmable Controller – System Manual Cod. 6ES7298-8FA20-8BH0 03/99 Release 01
Manual Curso Básico S15 Scuola Automazione Industriale Siemens - 1994
Manual Curso Básico S15P Scuola Automazione Industriale Siemens - 1994
Manual Curso CP-2 Siemens Maxitec - 1990
Manual Curso S7-300 Siemens
Software de programação STEP 7-Micro/WIN 32
Apostila de Técnicas Digitais – SENAI

7/24/2019 CLP - STEP 7
http://slidepdf.com/reader/full/clp-step-7 230/230