classificadores de imagem de satélite do pantanal sul ... · 2.3.1 radiometria...
TRANSCRIPT
Renan Rocha Fucci
Classificadores de Imagem de Satélite doPantanal Sul Matogrossense
Corumbá - MS
Agosto de 2016

Renan Rocha Fucci
Classificadores de Imagem de Satélite do Pantanal SulMatogrossense
Banca da disciplina de Trabalho de Conclusãode Curso II, apresentada ao Curso de Sistemasde Informação da Universidade Federal deMato Grosso do Sul, Campus Pantanal, comoparte dos requisitos para a obtenção do títulode Bacharel em Sistemas de Informação.
Universidade Federal do Mato Grosso do Sul - UFMS
Curso de Sistemas de Informação
Programa de Graduação
Orientador: Msc. Luciano Édipo Pereira da SilvaCoorientador: Dr. Carlos Roberto Padovani
Corumbá - MSAgosto de 2016

Renan Rocha FucciClassificadores de Imagem de Satélite do Pantanal Sul Matogrossense/ Renan
Rocha Fucci . – Corumbá - MS, Agosto de 2016-59 p. : il. (algumas color.) ; 30 cm.
Orientador: Msc. Luciano Édipo Pereira da Silva
Monografia (Graduação) – Universidade Federal do Mato Grosso do Sul - UFMSCurso de Sistemas de InformaçãoPrograma de Graduação, Agosto de 2016.1. Classificadores de Imagens Digitais. 2. Sensoriamento Remoto 3. Redes Neurais
Artificiais - RNA. 4. Lógica Difusa - Fuzzy. 5. Reconhecimento de Padrões. I. Orienta-dor: Msc. Luciano Édipo Pereira da Silva. II. Universidade Federal do Mato Grosso doSul - UFMS. III. Curso de Sistemas de Informação. IV. Classificadores de Imagem deSatélite do Pantanal.
Renan Rocha Fucci
Classificadores de Imagem de Satélite do Pantanal SulMatogrossense
Banca da disciplina de Trabalho de Conclusãode Curso II, apresentada ao Curso de Sistemasde Informação da Universidade Federal deMato Grosso do Sul, Campus Pantanal, comoparte dos requisitos para a obtenção do títulode Bacharel em Sistemas de Informação.
Trabalho aprovado. Corumbá - MS, 29 de Setembro de 2016:
Msc. Luciano Édipo Pereira da SilvaOrientador
Dr. Carlos Roberto PadovaniCoorientador
Dra. Beatriz Lima de Paula SilvaExaminadora
Corumbá - MSAgosto de 2016


Este trabalho é dedicado às pessoas que sonhamem utilizar a tecnologia como ferramenta para inovação.

Agradecimentos
Os agradecimentos principais são direcionados à minha família, amigos, professores,orientadores e todos aqueles que contribuíram, direta ou indiretamente, para que a produçãodeste trabalho.
Agradecimentos especiais são direcionados à EMBRAPA e ao curso de Sistemasde Informação da Universidade Federal do Mato Grosso do Sul, campus do Pantanal quecontribuíram para minha evolução e proporcionaram a interação com o meio acadêmico.

“O sucesso é ir de fracasso em fracasso sem perder entusiasmo.(CHURCHILL, Winston)


ResumoO Pantanal brasileiro situada na região centro-oeste do Brasil, mais especificamente noestado do Mato Grosso do Sul possui uma superfície espacial e temporal muito dinâmica evariável. Pelo tamanho e dificuldade de acesso, esta área do Pantanal possui uma demandatecnológica que seja capaz de auxiliar, de forma mais autônoma, nas análises e estudos quefacilitem na manipulação de seus aspectos e que levem em consideração sua preservação,conservação, sustentabilidade e também impulsionem a agropecuária local. Deste modo,neste trabalho foram exploradas as técnicas para classificação de imagens digitais desatélite Rapideye baseando-se em Redes Neurais Artificiais e Lógica Difusa para a tarefade identificação das regiões de vegetação e água das imagens do pantanal. Ao fim, foramfeitas análises comparativas desses classificadores utilizando verificações por especialistase técnicas para cálculos de índices de concordâncias. Os resultados foram satisfatórios,levando em consideração os meios de avaliação propostos, demonstrando que a metodologiade classificação de imagens de satélite por meio de Redes Neurais Artificiais e LógicaDifusa são pertinentes e apresentam um consenso entre si em suas classificações.
Palavras-chave: Classificadores de Imagens Digitais. Sensoriamento Remoto. RedesNeurais Artificiais - RNA. Lógica Difusa - Fuzzy. Reconhecimento de Padrões.


AbstractThe Brazilian Pantanal located in the midwest of Brazil, more specifically at the stateof Mato Grosso do Sul, holds a very dynamic and mutable spatial and temporal surface.Because of its size and difficult access, the Pantanal lacks technology that can help,autonomously, in the analysis and studies that facilitate the manipulation of its aspectsand take into consideration its preservation, conservation, sustainability and also thatboost the local agriculture. Thus, at this work, techniques for digital image classification ofthe remote sensor Rapideye were explored based on Artificial Neural Network and FuzzyLogic for the task of identification of vegetation and water regions of the Pantanal images.At the end, a comparative analysis of these classifiers was made using verifications byexperts and techniques for calculations of concordance indices. The results were satisfactory,considering the proposed means of assessment, showing that the classification methodologyof satellites images through Artificial Neural Network and Fuzzy Logic are relevant andshow a concordance between each other in their classifications.
Keywords: Digital Image Classification. Remote Sensing. Artificial Neural Network. FuzzyLogic. Pattern Recognition.

Lista de ilustrações
Figura 1 – Fluxograma Geral de Desenvolvimento . . . . . . . . . . . . . . . . . . 38Figura 2 – Fluxograma do Perceptron Linear . . . . . . . . . . . . . . . . . . . . . 39Figura 3 – Fluxograma do Perceptron de Múltiplas Camadas (MLP) . . . . . . . . 40Figura 4 – Composição RGB com as bandas 4/5/3 . . . . . . . . . . . . . . . . . 42Figura 5 – Imagem Amostra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Figura 6 – Imagem Parâmetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Figura 7 – Fluxograma da Lógica Difusa (Fuzzy) . . . . . . . . . . . . . . . . . . 44Figura 8 – Conjunto de Entrada Band4 (Red Edge) . . . . . . . . . . . . . . . . . 44Figura 9 – Conjunto de Entrada Band5 (NIR) . . . . . . . . . . . . . . . . . . . . 45Figura 10 – Classificação com Perceptron Linear . . . . . . . . . . . . . . . . . . . 49Figura 11 – Classificação com Perceptron de Múltiplas Camadas . . . . . . . . . . . 49Figura 12 – Classificação com Fuzzy. . . . . . . . . . . . . . . . . . . . . . . . . . . 49


Lista de tabelas
Tabela 1 – Interpretação do Índice Kappa . . . . . . . . . . . . . . . . . . . . . . 36Tabela 2 – Porcentagem de Acerto do Perceptron Linear . . . . . . . . . . . . . . 47Tabela 3 – Porcentagem de Acerto do Perceptron de Múltiplas Camadas . . . . . 48Tabela 4 – Porcentagem de Acerto do Fuzzy . . . . . . . . . . . . . . . . . . . . . 48Tabela 5 – Índice Kappa entre o Perceptron Linear (LP) e o Perceptron de Múltiplas
Camadas (MLP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50Tabela 6 – Índice Kappa entre o Perceptron de Múltiplas Camadas (MLP) e a
Lógica Difusa (Fuzzy) . . . . . . . . . . . . . . . . . . . . . . . . . . . 50Tabela 7 – Índice Kappa entre o Perceptron Linear (LP) e a Lógica Difusa (Fuzzy) 50
Lista de abreviaturas e siglas
AG Agreement of Chance - Concordantes por Chance
EVI Enhanced Vegetation Index - Índice de Vegetação Melhorado
CGI Computer Graphic Imagery - Computação Gráfica
GIS Geographic Information System - Sistema de Informação Geográfica
LP Linear Perceptron - Perceptron Linear
MLP Multi-layer Perceptron - Perceptron de Múltiplas Camadas
NDVI Normalized Difference Vegetation Index - Índice Normalizado paraDiferenciação de Vegetação
NDWI Normalized Difference Water Index - Índice Normalizado para Diferen-ciação de Água
NIR Near-infrared - Infravermelho Próximo
OA Observed Agreement - Observações Concordantes
OCR Optical Character Recognition - Reconhecimento Ótico de Caracteres
PDI Processamento Digital de Imagens
RGB Red Green Blue - Vermelho Verde Azul
RNA Redes Neurais Artificiais


Lista de símbolos
κ Kappa
a Valor de resolução radiométrica

Sumário
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2 ESTADO DA ARTE . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.1 Inteligência Artificial . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.1.1 Redes Neurais Artificiais . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.1.2 Lógica Difusa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.2 Visão Computacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.2.1 Processamento Digital de Imagens . . . . . . . . . . . . . . . . . . . . . . 302.2.2 Reconhecimento de Padrões . . . . . . . . . . . . . . . . . . . . . . . . . 312.2.3 Classificação de Imagens Digitais . . . . . . . . . . . . . . . . . . . . . . . 322.3 Sensoriamento Remoto . . . . . . . . . . . . . . . . . . . . . . . . . . 332.3.1 Radiometria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.3.2 Índices Radiométricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.4 Índice de Concordância entre Classificações . . . . . . . . . . . . . . 35
3 METODOLOGIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.1 Redes Neurais Artificiais . . . . . . . . . . . . . . . . . . . . . . . . . . 383.2 Lógica Difusa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4 RESULTADOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5 CONCLUSÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
REFERÊNCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55

25
1 INTRODUÇÃO
Situada no centro-oeste brasileiro, a Bacia do Alto rio Paraguai (BAP) compreendea região do Pantanal, uma das maiores planícies alagáveis do mundo, oriunda da confluênciade diversos rios, com características favoráveis às inundações devido a sua estrutura físicade relevo e ao clima tropical (SOUZA et al., 2006).
Estudos feitos no Pantanal apontam que essas regiões apresentam uma alta incons-tância espacial e temporal em relação à sua superfície. Essa grande variabilidade em suageografia física é oriunda de influência humana, como queimadas e desmatamentos e deeventos biofísicos, por exemplo, períodos de chuvas alternados com secas (GIONGO et al.,2009).
Logo, foi possível identificar o problema, visto que a região do pantanal possuiuma área imensa que apresenta uma variabilidade que pode ser oriunda de diversosaspectos, e que por esses mesmos aspectos, apresentam uma dificuldade muito grande demanipulação, controle e também acessibilidade para os que estudam, preservam ou, dealguma forma, necessitam do pantanal para desenvolvimento sustentável ou agropecuário,por exemplo: para agentes responsáveis pela preservação e conservação do pantanal e quepra isso precisam de dados como desmatamento, estiagem, queimada, entre outros; e paraagricultores que dependem da pesca ou de áreas especificas para plantio ou colheita.
Desta forma, foi evidente a necessidade da adoção de ferramentas tecnológicasque consigam auxiliar nos estudos e diagnósticos relacionados à preservação, conservação,sustentabilidade e que também possam impulsionar ou agregar valor à agropecuária.Tendo como uma das principais justificativas para o desenvolvimento deste trabalho aidentificação das regiões de vegetação aquática, isto é, tendo como área de interesse asregiões de água e de vegetação do pantanal sul-mato-grossense, mais especificamente, aregião do Rio Paraguai no município de Corumbá. Onde, nessa região nas superfícies devegetações aquáticas são encontrados uma determinada espécie de peixe conhecida comoTuvira, no qual possui um valor muito grande para a agropecuária local (RESENDE etal., 2006).
Logo, a motivação para o desenvolvimento deste trabalho deu-se pelo interesse nasáreas de sensoriamento remoto e reconhecimento de padrões por meio do uso de métodoscomputacionais e processamento digital de dados, empregando a ciência de InteligênciaArtificial. Como forma de continuação do trabalho desenvolvido e publicado em cima dotema de classificação de imagens de satélite utilizando técnicas de inteligência artificial(FUCCI et al., 2015).
Para se ter uma perspectiva de metodologias válidas com base no problema deste
26 Capítulo 1. INTRODUÇÃO
trabalho, fez-se um levantamento bibliográfico aprofundado sobre as principais tecnologiascomputacionais aplicadas na classificação de imagens de satélite, bem como aquelas comcaracterísticas mais promissoras, considerando os atributos das imagens do Pantanalbrasileiro e as tecnologias acessíveis que respeitem e auxiliem nos âmbitos agropecuáriose ambientais. Esse levantamento nos permitiu verificar que as Redes Neurais Artificiais(RNA) e Lógica Difusa (Fuzzy) são ferramentas bastante aplicadas para resolver váriosproblemas de classificação de imagens, entre elas, as imagens de sensoriamento remoto(SHWETHA; KUMAR, 2015; CRACKNELL; READING, 2015; JAYANTH et al., 2015).
Com base no escopo do problema e na justificativa, o objetivo geral deste trabalhofoi avaliar a viabilidade e eficiência de classificadores computacionais aplicados nas imagensdigitais adquiridas por meio de sensores remotos. No qual, para o cumprimento desseobjetivo geral, os objetivos específicos foram, a classificação das regiões de interesse, água evegetação, a aplicação de três diferentes técnicas, e como passo final, a análise comparativaentre as aplicações com base nos resultados obtidos. Por fazer parte das principais classesde classificações do sensoriamento remoto, mas não ser uma área de interesse deste trabalho,o Solo Exposto foi classificado como resto, ou seja, não foi aplicado nenhuma metodologiaou índice específico para a classificação, porém, para os resultados das classificações quenão fossem nem Água ou Vegetação, foi atribuída à classe de Solo (FRANÇA et al., 2012;ABELLERA; STENSTROM, 2012; LILLESAND; KIEFFER, 2007).
À vista disso, a hipótese de pesquisa deste trabalho para a tarefa de classificaçãonas áreas de interesse foi a aplicação dos algoritmos baseados em Redes Neurais Artificiais(RNA), o Linear Perceptron (LP) e Multi-Layer Perceptron (MLP) e o algoritmo baseadoem Lógica Difusa (Fuzzy). Em relação ao Sensoriamento Remoto, utilizou-se o satéliteRapideye. E, para a análise comparativa, foi aplicado o índice de concordância Kappa (κ),pois está muito presente na literatura como análise de resultados nas tarefas de classificaçãona área sensoriamento remoto, além de apresentar um índice qualitativo de conformidadeentre diferentes técnicas de classificação.
O texto está organizado e estruturado na seguinte sequência. O Capítulo 2 éo Estado da Arte , onde são embasados todos os termos, teorias e técnicas utilizadasneste trabalho. Em seguida, o próximo é a Metodologia, Capítulo 3, onde são descritosdetalhadamente quais foram todos os passos para o cumprimento dos objetivos e aplicaçãodas hipóteses de pesquisa. Como continuação, o tópico subsequente são os de Resultados,Capítulo 4, no qual foram expostos os resultados e também as análises dos resultados ecomparações obtidas. E por fim, como etapa final, é o tópico de Conclusão, Capítulo 5,onde são expostos e argumentados, de modo geral, o assunto tratado e as resoluçõesconquistados fundamentado em todo os outros tópicos.
27
2 Estado da Arte
2.1 Inteligência Artificial
A Inteligência Artificial (IA), segundo RUSSEL e NORVIG (2013), pode ser descritacom uma área de Ciências e Engenharia fundamentada em diversas disciplinas, das quaistem como objetivo o uso de agentes inteligentes que consigam realizar ações a partir depercepções do ambiente para a sistematização e automatização de tarefas. Deste modo,conseguem alcançar uma gama muito grande de áreas intelectuais humanas e possuemaplicabilidade em diversas ramos disciplinares e em diversos problemas reais.
Logo, de acordo com RUSSEL e NORVIG (2013), um agente inteligente pode serdefinido, de maneira geral, como um sistema computacional que, a partir de um conjuntode programações lógicas, consegue ter percepções de um ambiente, seja esse físico ou lógico,e é capaz de executar tarefas de maneira autônoma. Deste modo, TURING (1950) propôsuma ferramenta para a definição operacional de inteligência, isto é, de um agente inteligente.No qual, para que haja a identificação desse agente, o dispositivo computacional precisavapossuir as capacidades de: Processamento de linguagem natural, na qual compreende atarefa de identificação, por parte do computador, de uma linguagem natural humana;Representação de Conhecimento, em que descreve a habilidade do computador de armazenaras percepções obtidas; Raciocínio Automatizado, na qual refere-se ao uso das informaçõespara obtenção de conclusões próprias; Aprendizado de Máquina, em que retrata a aptidãode adaptação e extrapolação de padrões; Visão Computacional na percepção de objetoslógicos; E a Robótica para o controle e manuseio de objetos físicos e movimentação própria(RUSSEL; NORVIG, 2013).
Em vista disso, é cada vez mais evidente a utilização de Inteligência Artificial emdiversos tarefas do dia-a-dia humano, o que também está muito relacionado a ascensão dainformação e a utilização constante de dispositivos tecnológicos para atividades cotidianasdas pessoas. Grandes empresas também lançam projetos e modelos de negócios inovadoresque utilizam-se de inteligência artificial como forma de inovação, como por exemplo, carrosauto-dirigíveis (GOOGLE, 2016; FISHER, 2013), sistemas inteligentes de análise de dados(BENEDITO et al., 2012) e assistentes virtuais pessoais (MICROSOFT, 2016; APPLE,2016).
2.1.1 Redes Neurais Artificiais
Com base nas definições de Inteligência Artificial, é possível identificar que agentesinteligentes possuem processo de aprendizagem e percepção de informações. Neste contexto,
28 Capítulo 2. Estado da Arte
uma das técnicas dentro da IA que possuem fundamento em neurônios biológicos e basem-senas ciências cognitivas, de acordo com HAYKIN (2001), BRAGA et al. (2012), com objetivono desenvolvimento de sequências lógicas por meio de máquinas, são as Redes NeuraisArtificiais. Este processo de cognição, isto é, aprendizagem, de acordo com RUSSEL eNORVIG (2013), podem ser retratados como o processo de aprendizagem por meio deexemplos, no entanto podem ser caracterizados em diferentes formas de aprendizados,como, por exemplo, supervisionados, não supervisionados e por reforço.
Os aprendizados supervisionados, segundo RUSSEL e NORVIG (2013), são aquelesque possuem um supervisor que dará um feedback na apresentação de exemplos, emcontrapartida, o não supervisionado é aquele que não possui um feedback, isto é, nãotem um supervisor na etapa de amostra de exemplos. E a aprendizagem por reforço éaquela que aprende com a iteração contínua com o foco na aumento do desempenho.Embora, na perspectiva de HAYKIN (2001), esses mesmos processos de aprendizagemsejam denominados, respectivamente, aprendizado com professor, sem professor e comreforço, possuem essencialmente a mesma definição.
Como visto que Redes Neurais Artificiais (RNA) são baseadas em neurôniosbiológicos, esses desempenho papel fundamental em qualquer tipo de rede. Um neurônioartificial pode ser representado como uma unidade de processamento de informação quetem como características um conjunto de sinapses ou conexões, um somador ou funçãosomatória, e uma função de ativação. O conjunto de sinapses, possuem, em cada conexão,um força ou peso sináptico que é atribuído ao dado de entrada da RNA. O somador servecomo função para cálculo desse conjunto de conexões e seus respectivos pesos. E a funçãode ativação tem assume papel de restringir ou limitar a escala desse somatório (HAYKIN,2001).
Com base nas definições de neurônio artificial e de aprendizados supervisionados, astécnicas de Redes Neurais Artificiais mais recorrentes com estes aspectos na literatura sãoo Perceptron Linear (PL) e o Perceptron de Múltiplas Camadas (MLP). Essas técnicas sãomuito utilizadas também na resolução e automação de problemas reais nos dias de hoje, noqual podem desempenhar tarefas de classificação, categorização e previsão, aproximação eotimização (BRAGA et al., 2012; HAYKIN, 2001; RUSSEL; NORVIG, 2013).
O Perceptron Linear (PL), fundamentado por MCCULLOCH e PITTS (1943)e utilizando o modelo de neurônio artificial é uma técnica pra resolução de problemaslineares, exclusivamente. Esta resolução, baseando-se no aprendizado supervisionado, éfeita no perceptron linear através de uma função atualização de uma matriz de pesos, noqual essa matriz está diretamente ligada ao erro. Esse erro é a diferença entre a saída doda função de ativação do neurônio e o resultado desejado (aprendizado supervisionado).De acordo com ROSENBLATT (1958), um problema sempre terá solução se esse forlinearmente separável, no qual utiliza uma função de porta limiar no modelo de saída da
2.2. Visão Computacional 29
função de ativação de um neurônio. Em suma, o perceptron linear utiliza de uma funçãode atualização de peso que adapta-se no processo de aprendizagem e é capaz de resolver oproblema, porém esses problemas devem ser lineares, dos quais essa solução terá somenteduas possíveis classes de saída (BRAGA et al., 2012).
Em contrapartida, o Perceptron de Múltiplas Camadas (MLP) proposto porMINSKY e PAPERT (1969), teve como objetivo de proporcionar a soluções de pro-blemas que não fossem lineares, contrário do Perceptron Linear. Isto porque a maioria dosproblemas reais possuem características mais complexas e, em sua grande maioria, são nãolineares. Desta forma, diferentemente do PL, o MLP utiliza-se de camadas intermediárias,que também são neurônios artificiais, e da propagação de erro entre essas camadas, istoporque com a adição dessas camadas é possível aproximar-se de qualquer função contínua,podendo assim resolver problemas que tenham como características funções contínuas(BRAGA et al., 2012).
2.1.2 Lógica Difusa
Já Fuzzy, traduzida como Lógica Difusa e também conhecida como Lógica Mul-tivalorada, é o método da lógica que compreende a estrutura de resultado parcial, ouseja, diferente da lógica clássica que compreende resultados booleanos de sim ou não,verdadeiro ou falso, a lógica Fuzzy descreve o conceito de interpretação de resultados comvalor parcial que tem como característica de decisão o grau de pertinência ou grau deverdade, por exemplo, considerando a margem de 0 (falso) a 1 (verdadeiro), o grau depertinência 0,8 pode ser descrito como praticamente verdade e o grau de pertinência 0,2pode ser denominado como praticamente falso (SILVA; SILVA, 2005).
A lógica Fuzzy descreve o conceito de fuzzificação, no qual compreende o conceitode transformação de um problema e linguística em valores Fuzzy e a defuzzificação opasso inverso. Também descrito na lógica difusa, o modelo que associa um valor ao seuresultado, no qual é conhecido como proposição ou modelo proposicional, tendo como basea teoria de conjuntos nebulosos de ABAR (2004), no qual um resultado pode ter um graude pertinência em diferentes conjuntos, isto é, pertencer a diversos conjuntos. Desta forma,o lógica Fuzzy pode ser descrita como uma sequência de transformação de uma problemaem valores difusos (Fuzzificação), implementação dos conjuntos, implicação de modelosproposicionais e a transformação dos resultado difusos em linguísticas naturais (RUSSEL;NORVIG, 2013).
2.2 Visão ComputacionalNa mesma linha de pensamento de que pessoas passam mais e mais horas por dia
utilizando dispositivos eletrônicos, e por sua vez, sistemas computacionais, o área de Visão
30 Capítulo 2. Estado da Arte
Computacional ganha evidência nesta ascensão tecnológica. Assim sendo, o ramo de VisãoComputacional visa utilizar-se de técnicas matemáticas e lógicas para a representaçãocomputacional de qualquer elemento da vida real, seja esse palpável ou não. No qual, essavisão está na capacidade em que um computador deve ter em representar visualmente emum sistema de computador um elemento real, contendo o maior número de característicaspossíveis, das quais essas características muitas vezes não são visíveis ao olho humano,por exemplo, a frequência de onda de uma voz humana. Deste modo, para que existaa Inteligência Artificial e suas aplicações, é extremamente necessária a área da VisãoComputacional. Tendo como exemplo de Visão Computacional em Inteligência Artificial,nos processos de percepção do ambiente e execução de ações com base nas implementação,é necessário uma visão computacional, ou seja, uma tecnologia que consiga descrevercomputacionalmente, em forma de dados e informações que sejam manipuláveis, todos osaspectos deste ambiente (SZELISKI, 2010).
Na representação visual destas informações, as estruturas de dados computacionaisque conseguem representar melhor dados multidimensionais são imagens digitais e vídeos,também definidos como imagens com movimentos ou imagens sequenciais. Neste contexto,as principais tarefas da Visão Computacional são a aquisição, processamento e análisedigital de dados, das quais as mais comuns aplicações são Reconhecimento Ótico deCaracteres (Optical Character Recognition - OCR), reconhecimento e classificação deobjetos, modelagem tridimensional de dados, representação em imagem de percepçõesaéreas, computação gráfica (Computer Graphic Imahery - CGI), captura de movimento,reconhecimento biométrico, dentro outros (SZELISKI, 2010).
2.2.1 Processamento Digital de Imagens
Como visto que as estruturas de dados base da visão computacional são as imagensdigitais e que como uma de suas principais tarefas é o processamento, destaca-se o conceitode processamento de imagens. Regularmente denominados como Processamento Digitalde Imagem (PDI), esse conceito pode ser descrito como a disciplina em que as etapasde entradas e saídas de um processamento são caracterizadas, única e exclusivamente,por imagens. Logo, uma imagem pode ser definida com uma função de no mínimo duascoordenadas (f(x, y)) finitas em um plano dimensional, no qual, no âmbito digital, osvalores dessas coordenadas x e y são denominados pixeis ou níveis de cinza (GONZALEZ;WOODS, 2008).
De outro ponto de vista, na perspectiva de SZELISKI (2010), Processamento Digitalde Imagens compreende a tarefa de preprocessar uma imagem e convertê-la em uma formade dados em que consigam ser analisados posteriormente. No entanto, ambos os autoresdefinem que estes processamentos, do ponto de vista computacional, são feitos por meioda utilização de uma estrutura de dados de pixeis mapeados, denominado como matrizes.
2.2. Visão Computacional 31
Com base na tarefa de aquisição de Processamento Digital de Imagens, GONZALEZe WOODS (2008) definem que essa tarefa pode ser composta pela ação de algumailuminação, ou energia de uma definição mais abrangente, sobre uma superfície. No qualhá uma absorção de uma reflectância, isto é, proporção entre a ação energia exercida e aenergia refletida, e que por meio de um sensor, os elementos absorvidos dessa reflectânciapassam por um processo de conversão para valores digitais, pixeis.
Em seguida, a etapa de processamentos de PDI, pode ser descrita como operadoresde manipulação de pixeis entre diferentes matrizes. Deste modo, existem diversos tiposde processamentos, como: os com foco em pixel, ou seja, os que utilizam-se somente dovalor do pixel e não possuem dependência; os baseados em áreas, isto é, que possuemdependência de outros pixeis ou vizinhança de pixeis; os de transformadas de domínioou geométricas, no qual, utilizam-se de um conjunto de pixeis em forma de matrizes eos converte pra outro tipo de estrutura; e os com proposito na otimização, isto é, quetêm como objetivo a diminuição de funções e aumento de desempenho computacional.Com base na definição desses tipos de processamentos, algumas aplicações comuns são as:de coloração, aplicação de funções matemáticas e composições espectrais para o tipo deprocessamento baseado no pixel; técnicas de convolução e cálculos de média e medianapara os baseados em áreas de pixeis; os algoritmos de Fourier, rotação e prototipaçãográfica para os baseados em transformadas; e as técnicas Wavelet, Pyramid e Bayesianpara os baseados na otimização (SZELISKI, 2010; GONZALEZ; WOODS, 2008).
Logo depois, como consequência das etapas de aquisição e processamento, a etapade análise na perspectiva computacional compreende o passo em que são aplicados técnicase algoritmos para a observação, diagnóstico ou identificação desses dados processados, istoé, imagens. Assim sendo, algumas exemplos de aplicações são: segmentação de imagens,reconstrução 3D, renderização, reconhecimento de imagens, entre outros (SZELISKI, 2010).
2.2.2 Reconhecimento de Padrões
Na perspectiva de visão computacional, o reconhecimento de padrões pode serdescrito como uma ramo que tem como objetivo o reconhecimento de uma regularidade,ou padrão, de dados digitais. O reconhecimento dessas regularidades podem ser aplicadosem imagens, áudios, vídeos, estruturas estatísticas e geométrica, entre outros. Nestecontexto, o reconhecimento de padrões pode ser dividido no eixos de detecção de objetos,classificação e categorização. Essencialmente, o eixo de detecção de objetos compreende astécnicas e algoritmos com intuito de encontrar (detectar) objetos em estruturas de dados.O eixo de classificação, basicamente, descreve o as técnicas que atribuem um rótulo àum reconhecimento de uma regularidade. E por fim, o eixo de categorização descreve aspráticas que agrupam dados em diferentes categorias (SZELISKI, 2010).
Com foco maior no eixo de classificação, GONZALEZ e WOODS (2008) descrevem
32 Capítulo 2. Estado da Arte
que o padrões podem ser caracterizados por combinações de descritores e que umaclasse de padrões são conjuntos de descritores com propriedades em comum. Deste modo,Reconhecimento de Padrões compreende técnicas de para a atribuição para suas respectivasclasses de maneira autômata e com o mínimo de intervenção humana possível.
Segundo LILLESAND e KIEFFER (2007), os principais e mais generalizadosexemplos de aplicações de PDI são: contagem de objetos; classificação de áreas relevantese vigilância e previsão de eventos biofísicos. Os problemas de classificação, por exemplo,envolvem a tarefa de atribuir a um padrão desconhecido, uma entre várias classes conhecidas.No contexto de processamento de imagens de sensores remotos, classificação pode serretratada como o processo de designação de classes para um conjunto de pixeis de diversasbandas espectrais (CAMPBELL; WYNNE, 2011; ANDRADE et al., 2011; SHWETHA;KUMAR, 2015; BRAGA et al., 2012).
2.2.3 Classificação de Imagens Digitais
Com o fundamento das definições de Reconhecimento de Padrões e ProcessamentoDigital de Imagens, a Classificação de Imagens Digitais pode ser descrita como umaárea que utiliza-se das principais tarefas de visão computacional, isto é, possui um passode aquisição, processamento e análise digital de dados, no qual esses dados digitais sãoimagens e têm como objetivo a atribuição de um rótulo à determinados pixeis.
Sob a perspectiva de RICHERT e COELHO (2013), o processo no qual se coloca umaprendizado de máquina para aprender como desenvolver uma tarefa a partir de exemplos,e ao final distingui-las, é denominado de classificadores supervisionados ou treinamen-tos supervisionados. No contexto da classificação de imagens, os métodos baseados emaprendizados de máquina que mais são utilizados são: Redes Neurais Artificiais (RNA) eMáquinas de Vetores de Suporte. Nas ações exclusivas de classificação de imagens aplicadasa sensores remotos, os grupos mais usuais relacionadas à RNA sãos os algoritmos supervisi-onados Linear Perceptron e MLP (Multi-Layer Perceptron) (MAHMON; YA’ACOB, 2014;ELAALEM et al., 2013; ANDRADE et al., 2011; LEE et al., 2009; DU; WANG, 2015).
A sequência de passos para o processamento e classificação de imagens de sistemasGIS, conforme WENG (2010), é composta pela interpretação de imagens e a criação demapas ou conjunto de mapas, com suas respectivas características e conjunto de dados,a digitalização e compilação dessas informações, a utilização de métodos para análise eclassificação dessas informações e a construção de imagens processadas, categorizadas e/ouclassificadas em seus respectivos conjuntos e mapas. Com base na obra de BRAGA et al.(2012), algumas outras aplicações para a classificação de imagens são: reconhecimento decaracteres e imagens, auxílio a diagnósticos médicos, análise de risco de crédito, detecçãode fraude (VLASSELAER, 2015; ARAUJO et al., 2014; MA et al., 2010; KAMBLE;HEGARDI, 2015; VO et al., 2015; KOUTANAEI et al., 2015), entre outros.
2.3. Sensoriamento Remoto 33
Em seu trabalho sobre classificação de imagens, PISANI et al. (2009), apresentoua comparação dos resultados e ponderações sobre os aspectos da utilização desses e outrosalgoritmos quando aplicados a imagens de satélite das bacias hidrográficas na região doRio das Pedras, Itatinga-SP.
2.3 Sensoriamento Remoto
Sensoriamento remoto, de acordo com o WENG (2010), refere-se às atividades degravação, observação e percepção (sensoriamento) de objetos ou eventos em áreas a longadistância. De outro ponto de vista, com base na definição de CAMPBELL e WYNNE(2011), sensoriamento remoto pode ser interpretado como uma abstração e sintetizaçãode informação de uma superfície terrestre, adquirida por meio de perspectivas aéreasutilizando radiação eletromagnética, isto é, por intermédio de imagens de satélite. Destaforma, para compreender essas imagens, foram criados sistemas que auxiliam os usuáriosa visualizar e interpretar as tarefas de gravação, observação e percepção, através da virtu-alização e compilação dessas informações. Esses sistemas são conhecidos como GeographicInformation System (GIS). Deste modo, essas informações obtidas pelos Sensores Remotospodem ser interpretadas em programas e aplicações computacionais, capazes de manipulardados e características de imagens digitais. Este conceito pode ser relacionado como umprocessamento digital de imagens de satélite, e envolve diversas técnicas computacionaisque podem contribuir com os profissionais da área de Sensoriamento Remoto na realizaçãode suas tarefas. As técnicas de processamentos de imagens podem ser combinadas emaplicações que auxiliem na análise, classificação e manipulação de dados, para que possamser produzidas imagens e estatísticas equivalentes a esses dados.
De acordo com BLACKBRIDGE (2015), o sensor remoto denominado como Ra-pideye, tem como objetivo oferecer imagens com alta resolução com uma grande áreade cobertura de maneira diária. O Rapideye, sensor remoto que foi empregado para aobtenção da imagem utilizada neste trabalho, tem suas características de imagens divididasem níveis de produto: 1B, 3A e 3B. A descrição dos aspectos de imagens deste trabalhoserá a 3A, o produto que este trabalho tem acesso. Sendo assim, as características destaversão do sensor remoto é que o mesmo é composto por 5 bandas espectrais, sendo elasBlue, Green, Red, Red Edge e NIR, possuindo 5m2 por pixel e 77km2 por imagem.
2.3.1 Radiometria
À vista disso, o conceito de Radiometria é essencial para o entendimento de como asos dados sensores remotos são utilizados no Processamento Digital de Imagens. Sendo assim,com base na definição de NOVO (1992, p.22), no qual descreve que “Em SensoriamentoRemoto o que se registra, basicamente, é o fluxo radiante que deixa a superfície em direção
34 Capítulo 2. Estado da Arte
ao sistema sensor”. Isto é, os dados digitais de uma imagem de satélite são objetos quesão refletido e captados pelo sensor remoto. Com base na definição de fotometria deGONZALEZ e WOODS (2008), no qual diz que as energias dos sensores são feixes de luzvisíveis à olho nú, os satélites emitem energias magnéticas não visíveis ao olho humano.
Desta forma, uma das características radiométricas de um sensor remoto pode serrepresentada pela precisão de detecção do sinal, também denominado como resoluçãoradiométrica. Esta resolução radiométrica pode ser definida como a aptidão de um sensorem diferencias os índices de radiância refletidas obtidos pelo sensor. E de uma perspectivamais focada no processamento de imagem, a resolução radiométrica pode ser descrito pelovalor que representa o valor de cinza do pixel (NOVO, 2008).
Esta radiância refletida, também denominado como reflectância, é um elementoque possuí variação de acordo com a o tipo e características da superfície terrestre. Combase em LILLESAND e KIEFFER (2007) e levando em consideração as áreas de interessedeste trabalho, pode-se considerar que os índices de água são os que possuem menosreflectância por terem consistência mais líquida e refletirem menos as energias emitidas.Em contrapartida, as vegetações tendem a possuir índice maior de reflectância do queágua, isto porque em sua grande maioria, são têm características mais físicas e densas,fazendo com que as energias exercidas reflitam mais.
2.3.2 Índices Radiométricos
Para representar e parametrizar as características das imagens capturadas por Sen-sores Remotos, a partir de estudos, foi exposto alguns padrões de referências denominadosíndices Radiométricos. Esses índices, também conhecidos como descritores, são escalasmedidas capazes de determinar tipos de informações, tais como edifícios, áreas vegetativas,áreas aquáticas, dentre outros (FRANÇA et al., 2012).
Os índices radiométricos pertinentes ao objetivo e utilizados neste trabalho foramo: NDVI; NDWI; e o EVI. A banda espectral NIR (Near-infrared) também foi utilizadacomo um dos descritores, pois possui base teórica na literatura que indica sua utilizaçãopara auxiliar na diferenciação entre água e vegetação (SCHNEIDER; MCGINNIS, 1982).
O índice NDVI (Normalized Difference Vegetation Index), podendo ser descritocomo Índice Normalizado para Diferenciação de Vegetação, como o próprio nome diz é umíndice especifico pra vegetação e é composto pela equação 2.1, onde os a são os valoresda resolução radiométrica da respectiva banda, que exclusivamente neste cálculo são asbandas NIR e Red (CARLSON; RIPLEY, 1997).
NDV I = aNIR −a REDaNIR +a RED
(2.1)
2.4. Índice de Concordância entre Classificações 35
Já o NDWI (Normalized Difference Water Index), traduzido para Índice Normali-zado para Diferenciação de Água, é característico para água. E de acordo com GAO (1996)formado pela equação 2.2, no qual, assim como a equação 2.1, os a representam o pixelque contêm o valor da resolução radiométrica da respectiva banda,
NDWI = aNIR −a GREENaNIR +a GREEN (2.2)
Por último, outro índice específico pra vegetação denominado EVI (Enhanced Vege-tation Index), podendo ser traduzido como Índice Aprimorado de Vegetação, possui umamaior sensibilidade em áreas fortemente vegetada e que é representado matematicamentepela equação 2.3, no qual os a equivalem à quantia da resolução radiométrica da bandaseguinte, o G o fator de ganho, L o fator de correção para a inferência do solo e o C1 eC2 são, respectivamente, coeficientes de correção dos efeitos atmosféricos da banda azul edo solo (FERRREIRA et al., 2008; MARIANO et al., 2011).
EV I = G ∗ aNIR −a REDL+a NIR + C1 ∗a RED − C2 ∗a BLUE
(2.3)
2.4 Índice de Concordância entre Classificações
Em seguida, para o cumprimento do objetivo específico de análise comparativautilizou-se o Índice Kappa, também conhecido como coeficiente Kappa. Esse coeficiente foiexposto por COHEN (1960) como um índice ou um parâmetro estatístico de concordânciaentre duas classificações com um série classes ou objetos de classificação, ou seja, a quanti-dade desta série de classes ou de objetos de classificação devem ser iguais. Este coeficientefoi proposto para apresentar uma medida estatística de concordância normalizada entreescalas, para que o índice não seja inerente a uma concordância por chance ou acaso. Logo,para o cálculo do Kappa (κ), visto que esse coeficiente é um índice estatístico, leva-se emconsideração uma amostra de probabilidade denominada como Observed Agreement (OA),que pode ser traduzido como observações concordantes, e uma amostra de probabilidadedenominada como Agreement of Chance (AC), que pode ser descrito como concordantespor chance. Sendo assim, o índice é formado pelo cálculo:
κ =(
OA−AC1−AC
)(2.4)
Após a obtenção deste K, isto é, do índice Kappa, tem-se um índice que pode serrepresentado percentualmente como o índice de concordância entre classificadores sem aconcordância por chance ou acaso. Todavia, LANDIS e KOCH (1977) expõem uma formapara de interpretação literal da força do índice Kappa descrito na Tabela 1.

36 Capítulo 2. Estado da Arte
Tabela 1 – Interpretação do Índice Kappa
Índice Kappa (K) Força da Concordância<0 Poor (Pobre)
0 a 0,2 Slight (Desprezível)0,21 a 0,4 Fair (Justo)0,41 a 0,6 Moderate (Moderado)0,61 a 0.8 Substantial (Substâncial)0,81 a 1,0 Almost Perfect (Quase Perfeita)
A Tabela 1 representa à interpretação literal do índice kappa, que para cada escalado coeficiente (Primeira coluna), existe uma representação literal (Segunda Coluna), noqual a palavra em inglês é a referência exata de LANDIS e KOCH (1977) e a palavraseguida entre aspas é uma possível tradução.
Mesmo que o índice Kappa tenha sido proposto para apresentar uma medida deconcordância entre classificadores psicológicos e médicos, isto é, entre séries de classificaçõesde ciências humanas, é muito utilizado nos dias de hoje para fazer índices de classificaçõesde ciências exatas, ou seja, bastante utilizado para medir concordância de classificadoresde imagens de sensores remotos (GOMEZ; MONTERO, 2011; DENG et al., 2015).
Em resumo, o estado da arte deste trabalho teve como foco a embasamento teóricodas técnicas e ciências utilizadas neste trabalho, detalhando os conceitos pertinentesao trabalho e demonstrando a relação dentre estas bases teóricas, isto é, descrever amultidisciplinaridade entre os temas desse estado da arte.
37
3 Metodologia
A partir do levantamento bibliográfico, os algoritmos Perceptron Linear, PerceptronMúltiplas Camadas (MLP—Multi-layer Perceptron) e Lógica Difusa (Fuzzy) foram esco-lhidos como consequência de sua constante e positiva referência em diversas publicações,como em (GOMEZ; MONTERO, 2011; HOREWICZ et al., 2008; ALBUQUERQUE et al.,2009; KUSAKUNNIRAN et al., 2002; BRAGA et al., 2012).
O desenvolvimento dos algoritmos de RNA deste trabalho trouxe como seu principalalicerce teórico o trabalho de BRAGA et al. (2012). Desta forma, as RNAs, utilizandoestritamente os algoritmos Perceptron e MLP, foram implementadas na linguagem deprogramação orientada a objeto Java, ORACLE (2014), com o auxílio da biblioteca Neurophde SEVARAC (2011), específica para Redes Neurais Artificiais e Open Source, com basena definição de CC (2013). Em contrapartida, o algoritmo baseado em Lógica Difusa, ouFuzzy, foram implementados utilizando o ambiente de desenvolvimento e prototipaçãocomputacional MATLAB, utilizando o toolbox específicos para de processamento de imagensdigitais, Image Processing and Computer Vision e também o toolbox para lógica difusa,(MATHWORKS, 2016a; MATHWORKS, 2016b).
A mudança da ferramenta de implementação Java, para as técnicas de RedesNeurais Artificiais, para a ferramenta MATLAB, na técnica de lógica difusa, houve pelofato do MATLAB permitir a prototipação por meio gráfico de diversas característicasda técnica baseada em Fuzzy, facilitando a implementação da técnica e permitindo umamaior visualização. No entanto, ambas utilizaram o paradigma de programação orientadoà objeto.
Em seguida, a Figura 1 apresenta o fluxograma de desenvolvimento com base noobjetivo geral e que foi aplicado nas três técnicas descritas na hipótese de pesquisa destetrabalho. Este fluxograma foi feito para que houvesse um padrão de desenvolvimento entreas técnicas e que os resultados dessas pudessem ser analisadas dentro do mesmo contexto.
38 Capítulo 3. Metodologia
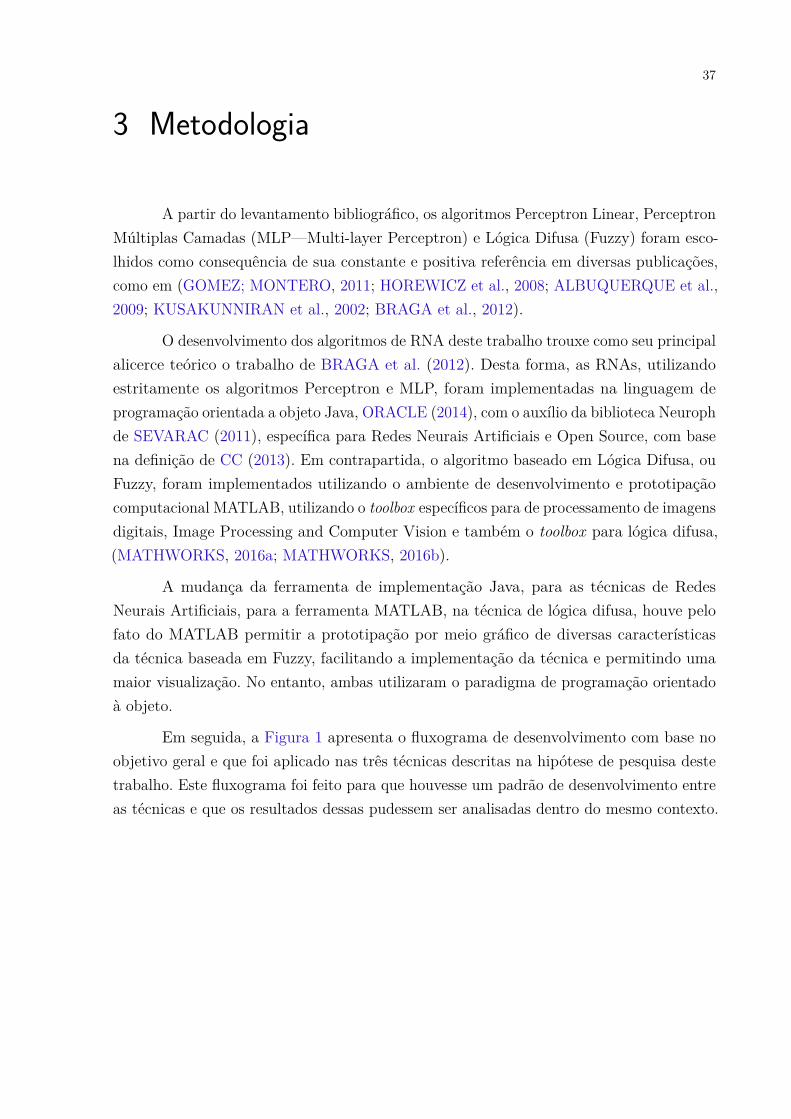
Figura 1 – Fluxograma Geral de Desenvolvimento
A Figura 1 representa o fluxo do desenvolvimento geral das hipóteses de pesquisana tarefa de classificação, ou seja, esse fluxo de ações foi aplicado para cada um dostrês classificadores, LP, MLP e Fuzzy. No entanto, cada ação desse fluxograma podeser executada de maneira diferente e é relativo à implementação. Na primeira ação deAquisição da Imagem, representa o passo em que o algoritmo lê a imagem, em seguida, opasso de Extração de Conteúdo descreve o passo em que o algoritmo extrai dessa imagemsomente as bandas espectrais que serão utilizadas, o que dependerá da técnica. Após, oReconhecimento dos Padrões compreende o passo da utilização dos dados ou índices queserão utilizados, por exemplo, nas técnicas LP e MLP os índices NDVI, EVI, NDWI eNIR, e na técnica de lógica difusa as bandas NIR e Red Edge. Em seguida a aplicaçãodo classificador, isto é, de umas das três técnicas utilizadas (LP, MLP e Fuzzy). Comopasso resultante do anterior, a composição da imagem classificada. E como passo final, avalidação pelo especialista, ou seja, etapa em que utilizou-se de uma imagem de parâmetro(Figura 6) para quantificar a quantidade de acerto do classificador.
3.1 Redes Neurais Artificiais
Como primeiro passo da metodologia adotada exclusivamente para os algoritmosPerceptron Linear e Perceptron de Múltiplas Camadas, criou-se um vetor de descritoresbaseados nos índices radiométricos. A escolha de amostras foi feita por um especialista
3.1. Redes Neurais Artificiais 39
em sensoriamento remoto com ênfase em geoprocessamento aplicado ao Pantanal, usandoas cinco bandas espectrais do sensor RapidEye (Red, Green, Blue, RedEdge e Nir). Asimagens classificadas estão no formato PNG com escala de níveis de cinza de 16 bits. Asimagens de amostra contêm unidades dos dois padrões definidos das classes de classificaçãodesejada (água e vegetação). Para a composição do vetor de descritores, a partir doscálculos de base de composição dos índices NDVI, EVI, NDWI e NIR, criou-se uma matrizpara armazenar cada índice usado como descritor, com as mesmas dimensões das imagensdas bandas espectrais, todavia, com todos os valores de pixeis nulos. Após a criaçãodesta imagem, para cada coordenada de pixel, calcularam-se os índices correspondentes,utilizando as mesmas coordenadas de pixeis das imagens das bandas do sensor remoto.Como alguns dos índices possuem escalas predefinidas referentes aos limites dos índices,foram estabelecidos cálculos para a representação dos pixeis das imagens das bandasespectrais de 16bits para com as escalas dos índices.
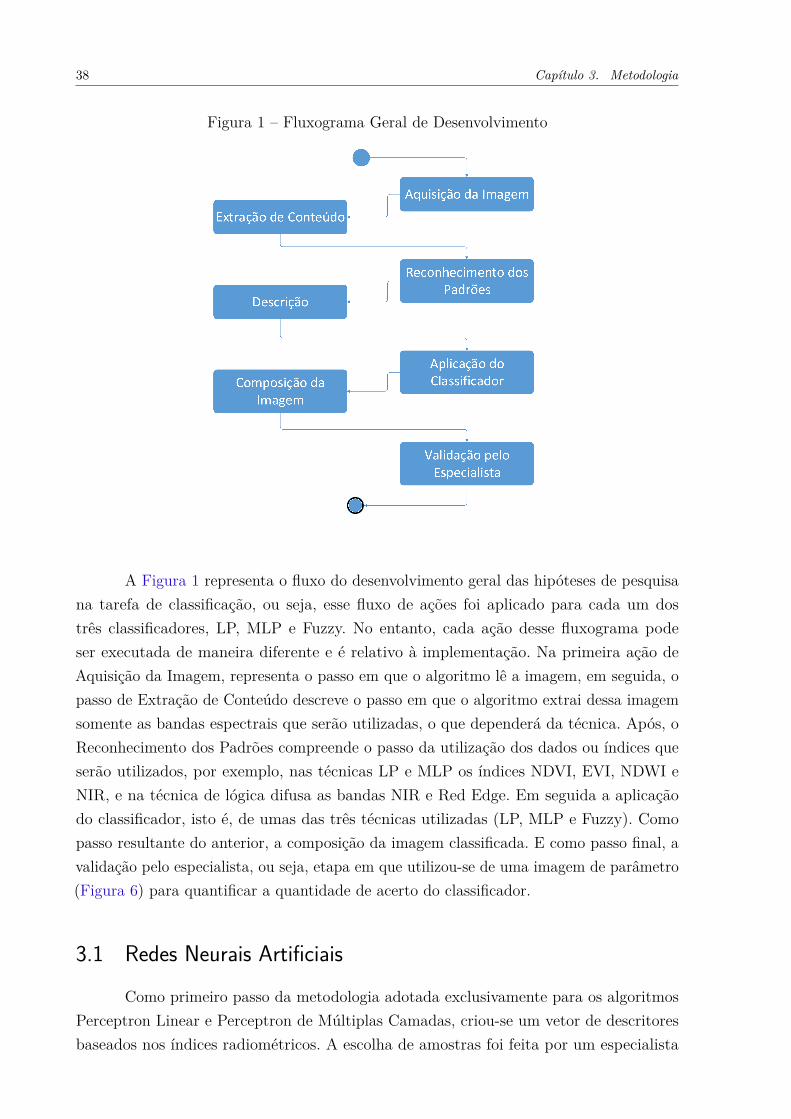
Como passo seguinte, a Figura 2 demonstra o fluxo de desenvolvimento utilizadona técnica do Perceptron Linear.
Figura 2 – Fluxograma do Perceptron Linear
Na Figura 2, o item A representa o início do algoritmo, o B é o passo de treinamento,que é a apresentação das imagens de amostra para o algoritmo. O item C é o passo daclassificação pixel a pixel da imagem original após a criação do vetor de pesos do treinamentoda rede (Item B), o item D expressa o passo de composição da classificação, e por fim, oitem E expõe o fim do classificado com o Perceptron Linear.
40 Capítulo 3. Metodologia
É bom recapitular que essa sequência de passos com o Perceptron Linear, do itemA até E, são executados duas vezes, uma para classificação de água e não água, gerando abanda Blue da imagem e a outra para a classificação de vegetação e não vegetação, criandoa banda Green da imagem. Neste caso, o solo não é um passo de classificação utilizandouma RNA, e sim uma por uma lógica de resto, ou seja, como já foram classificados água evegetação, o que sobrou e não foi classificado em nenhum caso, é considerado como solo,gerando a banda Red da imagem. E ao fim dessas repetições essas bandas são agrupadasem uma imagem com três bandas espectrais (RGB – Red, Green, Blue).
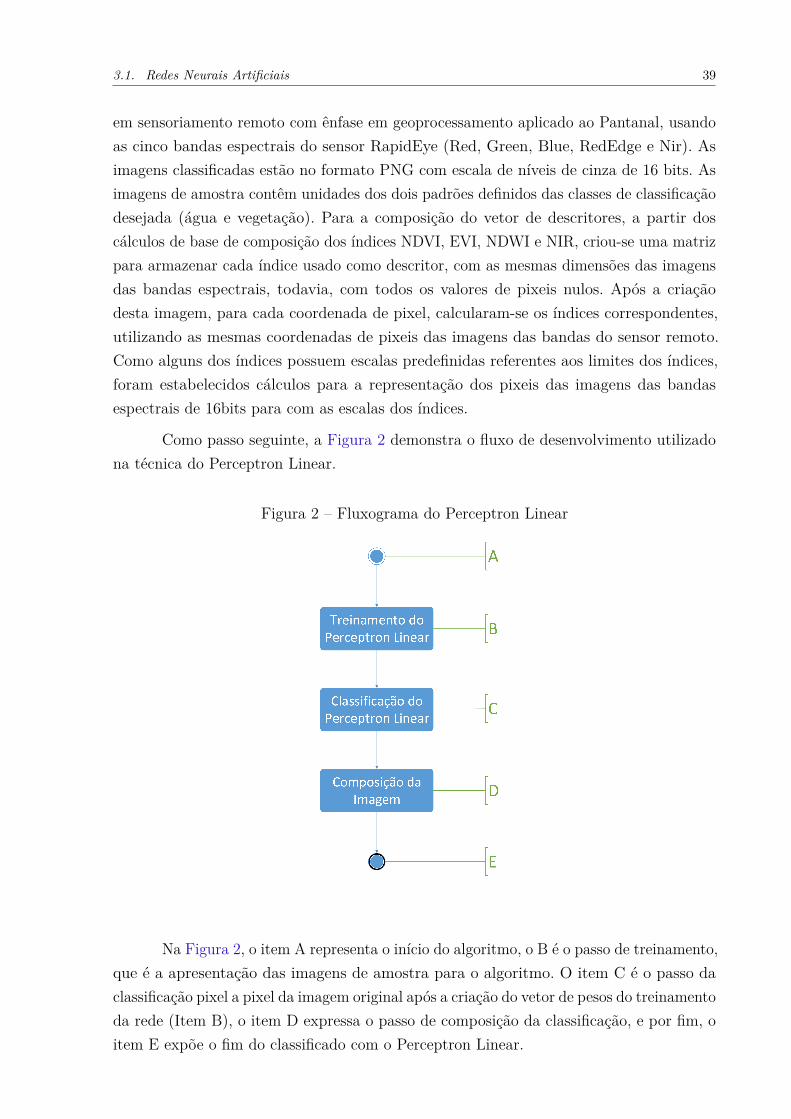
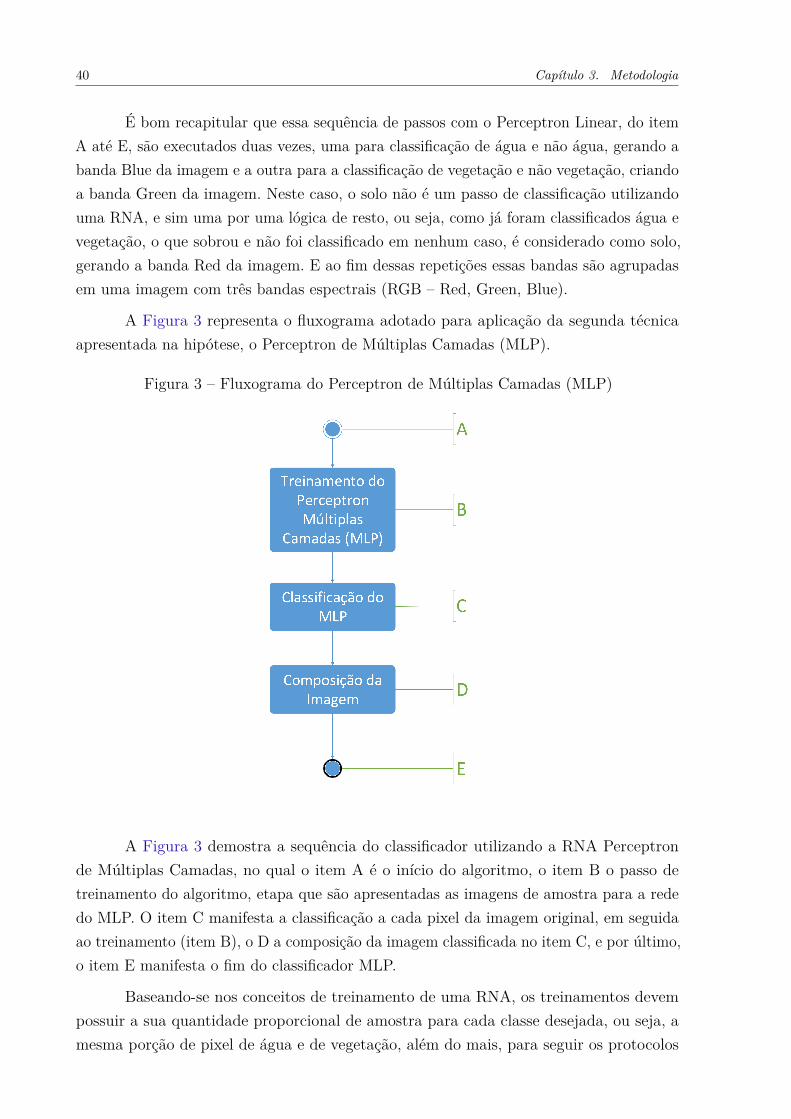
A Figura 3 representa o fluxograma adotado para aplicação da segunda técnicaapresentada na hipótese, o Perceptron de Múltiplas Camadas (MLP).
Figura 3 – Fluxograma do Perceptron de Múltiplas Camadas (MLP)
A Figura 3 demostra a sequência do classificador utilizando a RNA Perceptronde Múltiplas Camadas, no qual o item A é o início do algoritmo, o item B o passo detreinamento do algoritmo, etapa que são apresentadas as imagens de amostra para a rededo MLP. O item C manifesta a classificação a cada pixel da imagem original, em seguidaao treinamento (item B), o D a composição da imagem classificada no item C, e por último,o item E manifesta o fim do classificador MLP.
Baseando-se nos conceitos de treinamento de uma RNA, os treinamentos devempossuir a sua quantidade proporcional de amostra para cada classe desejada, ou seja, amesma porção de pixel de água e de vegetação, além do mais, para seguir os protocolos
3.1. Redes Neurais Artificiais 41
de RNA (BRAGA et al., 2012), o treinamento da rede foi feito de modo interpolado, naapresentação de amostras das classes para o treinamento da rede, foi intercalada umaamostra de água, uma de vegetação e uma de solo até o término das amostras. Nostreinamentos da RNA-MLP, empregou-se exclusivamente a arquitetura Back-Propagation,pois, na fase forward, define-se a saída da rede para o padrão de entrada, na fase backwardatualiza a arquitetura supervisionada para atualizar os pesos, além de aplicar a regra deltano erro da rede (BRAGA et al., 2012). Para ambos os algoritmos, estipulou-se taxa deerro igual a zero e limite de iteração igual a um trilhão, a fim de tentar forçar o algoritmo,na atualização dos pesos na etapa de treinamento, a ter a menor taxa de erro possível.
Na etapa de classificação, foram adotados os mesmos parâmetros adotados para otreinamento, juntamente com os pesos obtidos por aquela etapa. A imagem classificadatambém está no formado PNG com escala de níveis de cinza de 16bits. Nesta etapa,cria-se uma imagem de saída com as mesmas dimensões da imagem original, porém comtodos os valores dos pixeis nulos. Em seguida, os algoritmos leem cada pixel da imagemoriginal, calculam os seus descritores e enviam para a RNA. O classificador processa essepixel retornando um valor representando uma das classes (água, vegetação), esse valor étransformado em uma cor predefinida como azul para água, verde para vegetação, vermelhopara áreas que não foram classificadas nem como água e vegetação. Essa cor é mapeadana imagem de saída, na sua respectiva posição.
No Perceptron Linear, Figura 2, o algoritmo é executado duas vezes separando asclasses desejadas uma por vez, primeiro separa o que é água do que não é água e vegetaçãodo que não é vegetação. O solo, visto que não se usou nenhum índice radiométricoespecífico para solo e não é uma das áreas de interesse deste trabalho, não utilizou-senenhuma arquitetura das Redes Neurais Artificiais, a classificação foi feita com os pixeisremanescentes que não foram classificados como vegetação ou água. Assim como noPerceptron de Múltiplas Camadas (MLP), Figura 3, o algoritmo foi executado uma únicavez separando as três classes, no qual duas delas são as desejadas (água e vegetação) e aoutra o que não foi classificado como área deseja.
Para definir a melhor solução ou identificar qual abordagem foi mais apropriada,analisaram-se diferentes treinamentos. Estes foram realizados com diversas combinaçõesde índices, com aplicação de diferentes funções de ativação, que, conforme (BRAGAet al., 2012, p.9), podem ser quaisquer funções matemáticas escolhidas de acordo como comportamento do erro do problema. Nestes treinamentos, a análise de precisão doclassificador foi comparada com uma classificação feita manualmente por um especialistaem sensoriamento remoto, a qual foi construída por este a partir da análise visual dosdados do satélite Rapideye, auxiliado por fotografias aéreas georreferenciadas da regiãoem análise.
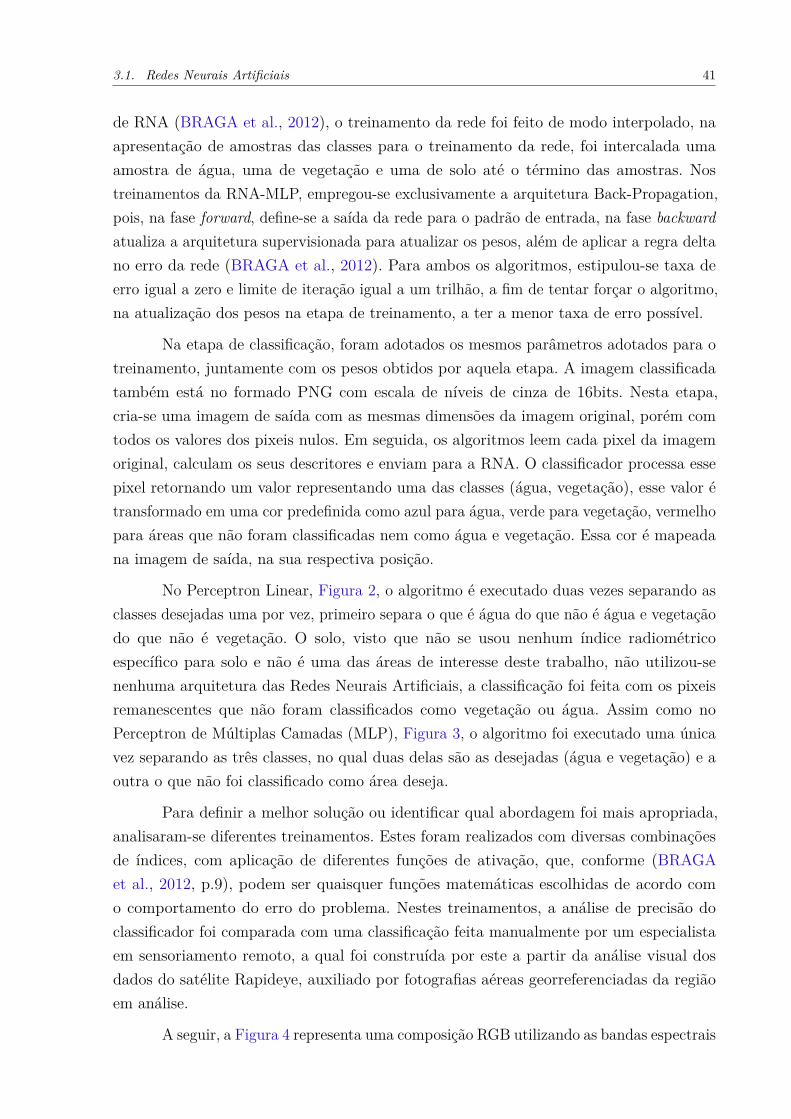
A seguir, a Figura 4 representa uma composição RGB utilizando as bandas espectrais
42 Capítulo 3. Metodologia
do sensor Rapideye: Red Edge (4), NIR (5) e Blue (3).
Figura 4 – Composição RGB com as bandas 4/5/3
3.2. Lógica Difusa 43
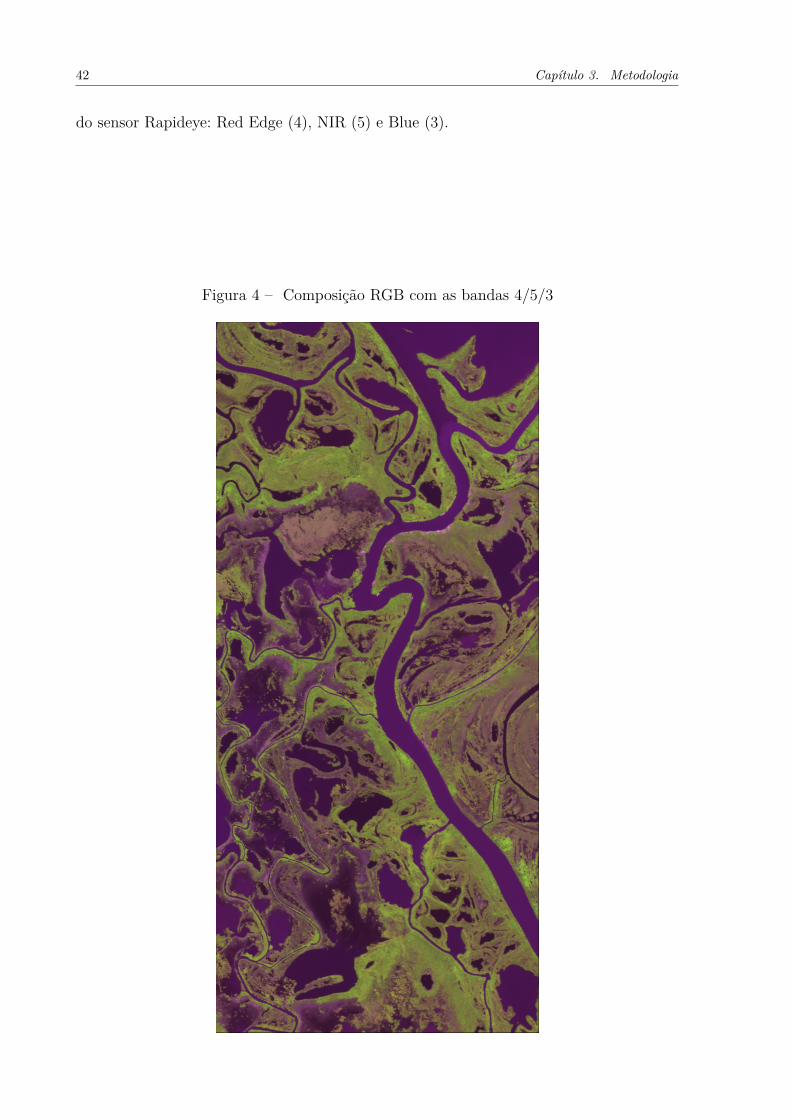
Figura 5 – Imagem Amostra Figura 6 – Imagem Parâmetro
A Figura 4 representa a composição da imagem que foi feita para apresentarvisualmente as características da imagem utilizada neste trabalho para a aplicação dastécnicas de classificação, adquirida pelo sensor remoto Rapideye. Já a Figura 5 é a imagemde amostras, adotada no treinamento do Perceptron Linear e do MLP (Figura 2 e Figura 3,respectivamente) marcadas manualmente pelo especialista, na qual os pixeis em azulrepresentam regiões com água, em verde vegetação e em vermelho solo, e a Figura 6 é aimagem de parâmetro, utilizada na analises dos resultados de ambos os classificadores,após as classificações, também compostas à mão pelo especialista, nas quais as regiões emazul representam a água, em verde a vegetação e em vermelho o solo.
3.2 Lógica DifusaDiferentemente da metodologia de desenvolvimento dos algoritmos anteriores, o
algoritmo baseado em Fuzzy não possui uma etapa de treinamento e não necessita deum processo de treinamento ou da imagem de amostra (Figura 5) e também só foramutilizadas as bandas 4 e 5 espectrais do sensor remoto Rapideye que são, respectivamente,Red Edge e NIR, visto que são essas as que possuem escalas para a representação dasclasses de interesse, isto é, água e vegetação.
44 Capítulo 3. Metodologia
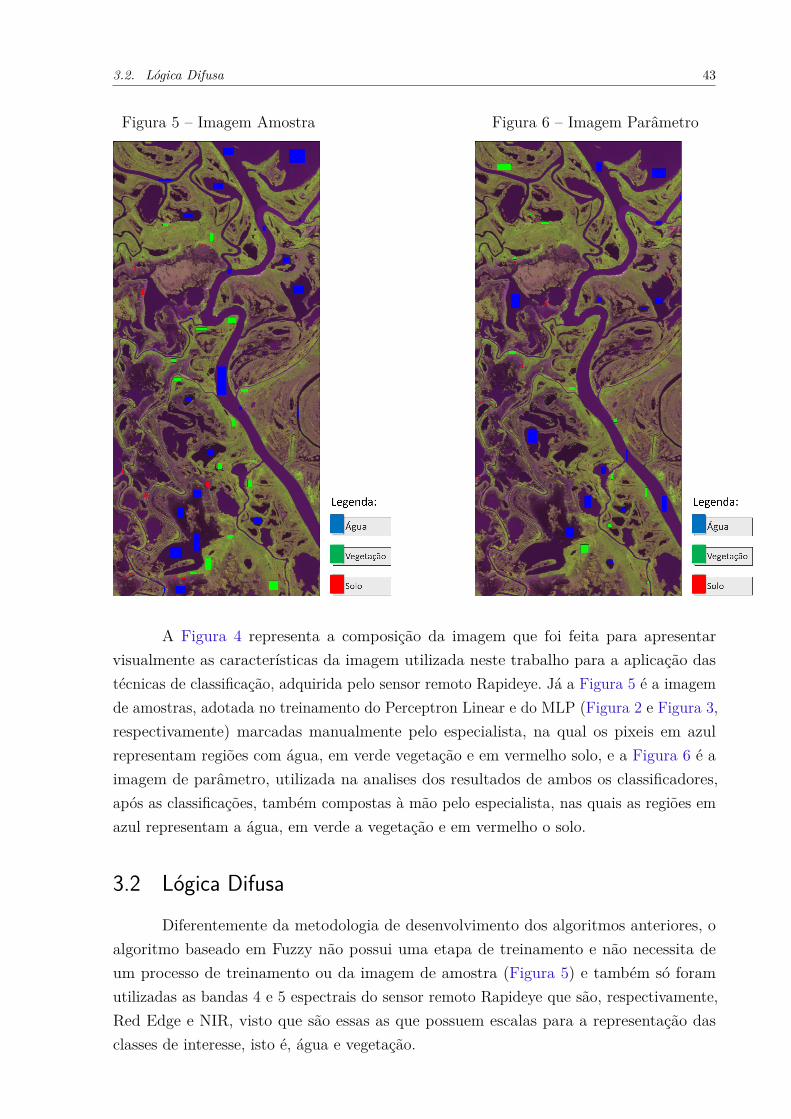
Como passo seguinte, a Figura 7 representa o fluxograma do desenvolvimento datécnica de classificação baseada na lógica difusa (Fuzzy).
Figura 7 – Fluxograma da Lógica Difusa (Fuzzy)
No fluxograma do algoritmo Fuzzy, Figura 7, o item A representa o início doalgoritmo. Em seguida, item B, como primeira instância foi feita a implementação dosconjuntos, isto é, a criação dos conjuntos de entrada para a etapa de fuzzificação doalgoritmo. Este conjuntos estão representados visualmente neste trabalho pelas Figura 8 eFigura 9.
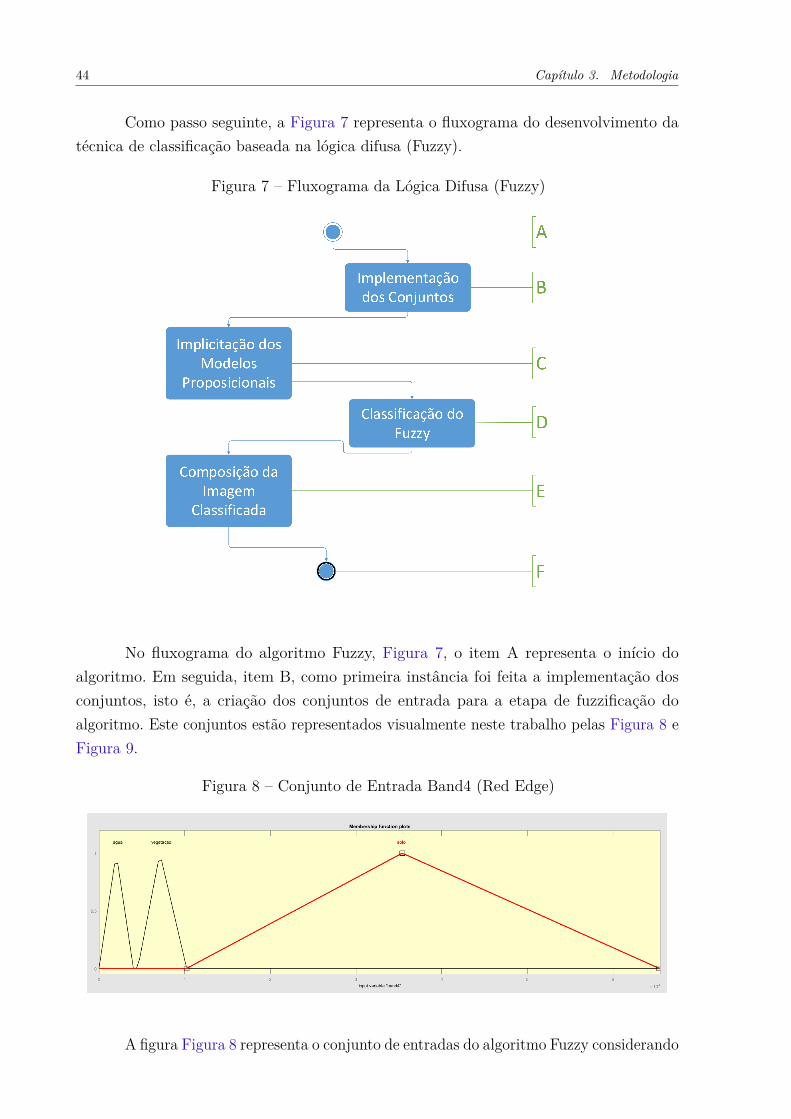
Figura 8 – Conjunto de Entrada Band4 (Red Edge)
A figura Figura 8 representa o conjunto de entradas do algoritmo Fuzzy considerando
3.2. Lógica Difusa 45
apenas a banda espectral Red Edge do satélite Rapideye. Essa figura implementa a regrade que todos os valores de pixel, impreterivelmente da banda 4 (Red Edge), se estiverem nointervalo de 0 a 4012, foram fuzzificados como um valor que representa água, se estiverem nointervalo de 4013 a 10227, foram representados como vegetação nos valores de fuzzificaçãoe se esses pixeis forem de 10228 até 65536, que é o fim dos valores de uma banda espectralcom escala de níveis de cinza de 16 bits, foram fuzzificados como solo.
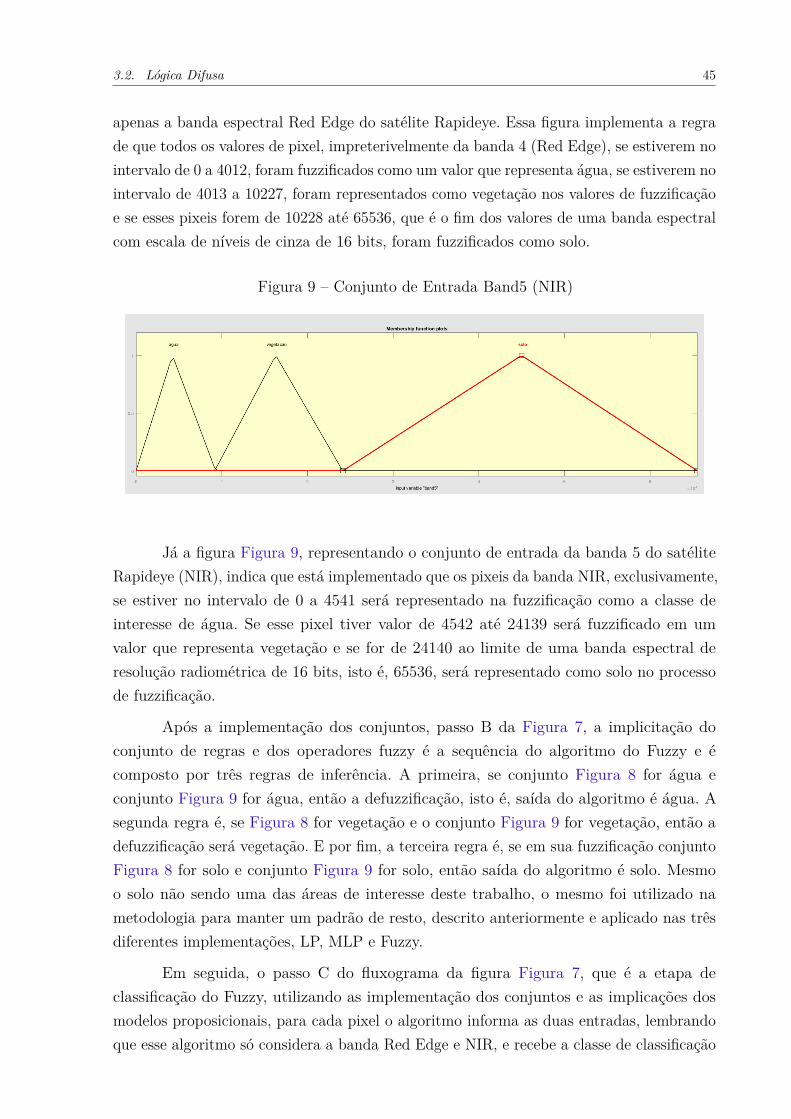
Figura 9 – Conjunto de Entrada Band5 (NIR)
Já a figura Figura 9, representando o conjunto de entrada da banda 5 do satéliteRapideye (NIR), indica que está implementado que os pixeis da banda NIR, exclusivamente,se estiver no intervalo de 0 a 4541 será representado na fuzzificação como a classe deinteresse de água. Se esse pixel tiver valor de 4542 até 24139 será fuzzificado em umvalor que representa vegetação e se for de 24140 ao limite de uma banda espectral deresolução radiométrica de 16 bits, isto é, 65536, será representado como solo no processode fuzzificação.
Após a implementação dos conjuntos, passo B da Figura 7, a implicitação doconjunto de regras e dos operadores fuzzy é a sequência do algoritmo do Fuzzy e écomposto por três regras de inferência. A primeira, se conjunto Figura 8 for água econjunto Figura 9 for água, então a defuzzificação, isto é, saída do algoritmo é água. Asegunda regra é, se Figura 8 for vegetação e o conjunto Figura 9 for vegetação, então adefuzzificação será vegetação. E por fim, a terceira regra é, se em sua fuzzificação conjuntoFigura 8 for solo e conjunto Figura 9 for solo, então saída do algoritmo é solo. Mesmoo solo não sendo uma das áreas de interesse deste trabalho, o mesmo foi utilizado nametodologia para manter um padrão de resto, descrito anteriormente e aplicado nas trêsdiferentes implementações, LP, MLP e Fuzzy.
Em seguida, o passo C do fluxograma da figura Figura 7, que é a etapa declassificação do Fuzzy, utilizando as implementação dos conjuntos e as implicações dosmodelos proposicionais, para cada pixel o algoritmo informa as duas entradas, lembrandoque esse algoritmo só considera a banda Red Edge e NIR, e recebe a classe de classificação

46 Capítulo 3. Metodologia
água ou vegetação. E como passo final (item E), após a classificação de todos esses pixeis,o algoritmo faz a composição da imagem de saída já classificada.
Neste capítulo, em suma, foram apresentadas as metodologias adotas para aconquista dos objetivos, gerais e específicos, e para detalhar de maneira sistemática quaisforam os passos utilizados para a implementação das técnicas do LP, MLP e Fuzzy.
47
4 Resultados
Os resultados foram analisados com base em todas as implementações utilizadasneste trabalho, isto pois, como em todas as técnicas foram aplicados utilizando um padrãode desenvolvimento (Figura 1), a análise desses dados empregando somente as áreas deinteresse, água e vegetação, pode ser feita utilizando o resultado das classificações pormeio das técnicas de RNA, Perceptron Linear e Percceptron de Múltiplas Camadas, e atécnica de lógica difusa (Fuzzy).
Nos algoritmos baseados em Redes Neurais Artificiais, a partir da sequência depassos dos dois algoritmos (Figura 2 e Figura 3), porém, a partir da composição dosdescritores da imagem de amostra. Ambas as sequências de passos foram repetidas comdiferentes combinações de índices radiométricos. Ademais, para cada uma dessas combi-nações de descritores e execução dos passos, foram aplicados três diferentes funções deativação, ou transferência, sendo elas: Sigmoide (Sigmoid), Rampa (Ramp) e Gaussiano(Gaussian) para o Perceptron Linear, Seno (Sin) e Hiperbólica (Tanh) para o Perceptronde Móltiplas Camadas. Essas funções de ativação, como estão diretamente ligadas como erro do neurônio e têm como propósito a delimitação das saídas da RNA, seja LP ouMLP, foram escolhidas por apresentarem uma porcentagem de acerto maior que outrasfunções e que, naturalmente, essas funções possuem semelhanças com as funções de errode ambas as redes neurais artificiais quando aplicadas na classificação.
No Perceptron Linear, as combinações de índices que produziram os melhoresresultados, para a classificação de água foi NDWI-EVI-NDVI-NIR e a para a classificaçãode vegetação foi NDVI-EVI-NIR. Nessa classificação, as amostras de solo foram utilizadaspara indicar que aquelas regiões não eram água e nem vegetação. Entretanto, como não seadotou nenhum descritor de solo, como dito anteriormente, não foi produzida a classe solopara os pixeis após a classificação utilizando uma Rede Neural Artificial.
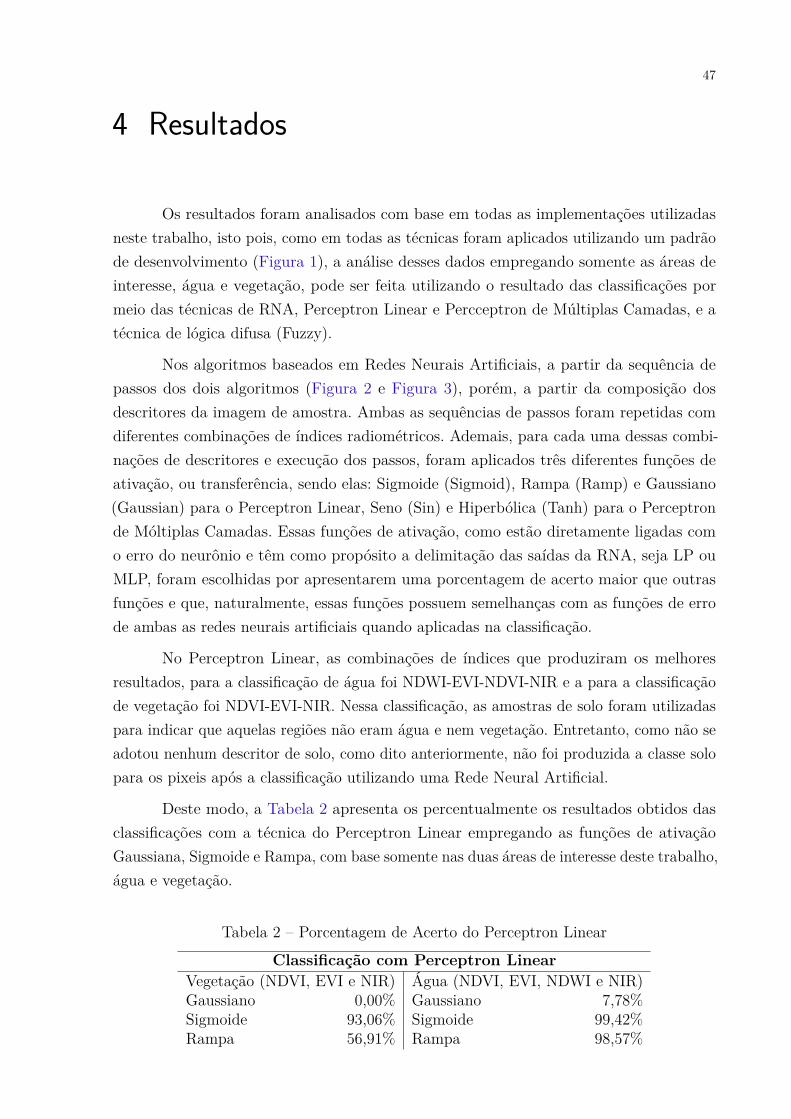
Deste modo, a Tabela 2 apresenta os percentualmente os resultados obtidos dasclassificações com a técnica do Perceptron Linear empregando as funções de ativaçãoGaussiana, Sigmoide e Rampa, com base somente nas duas áreas de interesse deste trabalho,água e vegetação.
Tabela 2 – Porcentagem de Acerto do Perceptron Linear
Classificação com Perceptron LinearVegetação (NDVI, EVI e NIR) Água (NDVI, EVI, NDWI e NIR)Gaussiano 0,00% Gaussiano 7,78%Sigmoide 93,06% Sigmoide 99,42%Rampa 56,91% Rampa 98,57%
48 Capítulo 4. Resultados
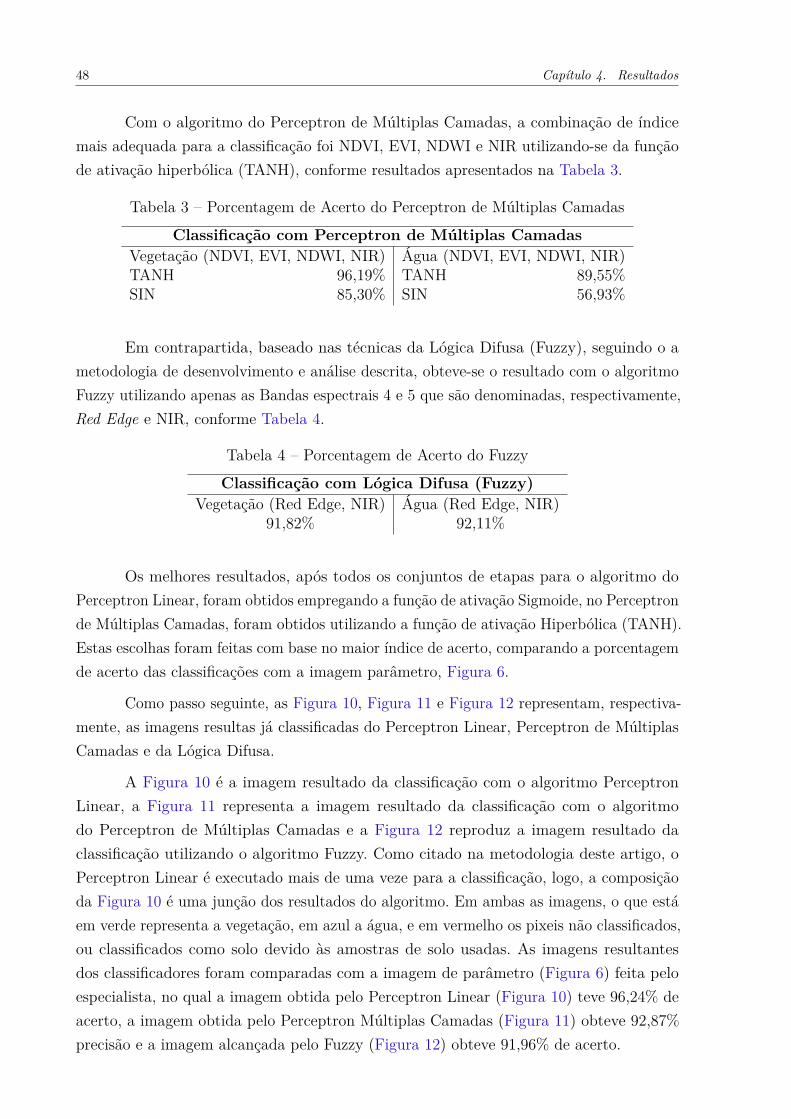
Com o algoritmo do Perceptron de Múltiplas Camadas, a combinação de índicemais adequada para a classificação foi NDVI, EVI, NDWI e NIR utilizando-se da funçãode ativação hiperbólica (TANH), conforme resultados apresentados na Tabela 3.
Tabela 3 – Porcentagem de Acerto do Perceptron de Múltiplas Camadas
Classificação com Perceptron de Múltiplas CamadasVegetação (NDVI, EVI, NDWI, NIR) Água (NDVI, EVI, NDWI, NIR)TANH 96,19% TANH 89,55%SIN 85,30% SIN 56,93%
Em contrapartida, baseado nas técnicas da Lógica Difusa (Fuzzy), seguindo o ametodologia de desenvolvimento e análise descrita, obteve-se o resultado com o algoritmoFuzzy utilizando apenas as Bandas espectrais 4 e 5 que são denominadas, respectivamente,Red Edge e NIR, conforme Tabela 4.
Tabela 4 – Porcentagem de Acerto do Fuzzy
Classificação com Lógica Difusa (Fuzzy)Vegetação (Red Edge, NIR) Água (Red Edge, NIR)
91,82% 92,11%
Os melhores resultados, após todos os conjuntos de etapas para o algoritmo doPerceptron Linear, foram obtidos empregando a função de ativação Sigmoide, no Perceptronde Múltiplas Camadas, foram obtidos utilizando a função de ativação Hiperbólica (TANH).Estas escolhas foram feitas com base no maior índice de acerto, comparando a porcentagemde acerto das classificações com a imagem parâmetro, Figura 6.
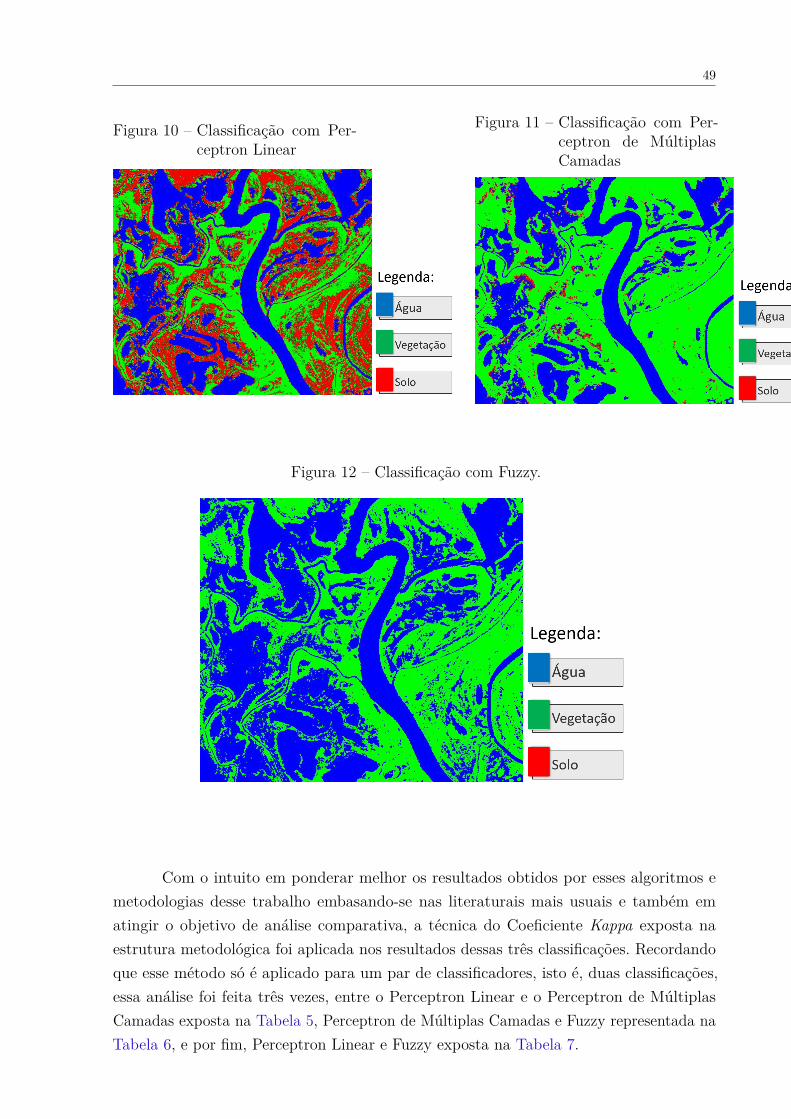
Como passo seguinte, as Figura 10, Figura 11 e Figura 12 representam, respectiva-mente, as imagens resultas já classificadas do Perceptron Linear, Perceptron de MúltiplasCamadas e da Lógica Difusa.
A Figura 10 é a imagem resultado da classificação com o algoritmo PerceptronLinear, a Figura 11 representa a imagem resultado da classificação com o algoritmodo Perceptron de Múltiplas Camadas e a Figura 12 reproduz a imagem resultado daclassificação utilizando o algoritmo Fuzzy. Como citado na metodologia deste artigo, oPerceptron Linear é executado mais de uma veze para a classificação, logo, a composiçãoda Figura 10 é uma junção dos resultados do algoritmo. Em ambas as imagens, o que estáem verde representa a vegetação, em azul a água, e em vermelho os pixeis não classificados,ou classificados como solo devido às amostras de solo usadas. As imagens resultantesdos classificadores foram comparadas com a imagem de parâmetro (Figura 6) feita peloespecialista, no qual a imagem obtida pelo Perceptron Linear (Figura 10) teve 96,24% deacerto, a imagem obtida pelo Perceptron Múltiplas Camadas (Figura 11) obteve 92,87%precisão e a imagem alcançada pelo Fuzzy (Figura 12) obteve 91,96% de acerto.
49
Figura 10 – Classificação com Per-ceptron Linear
Figura 11 – Classificação com Per-ceptron de MúltiplasCamadas
Figura 12 – Classificação com Fuzzy.
Com o intuito em ponderar melhor os resultados obtidos por esses algoritmos emetodologias desse trabalho embasando-se nas literaturais mais usuais e também ematingir o objetivo de análise comparativa, a técnica do Coeficiente Kappa exposta naestrutura metodológica foi aplicada nos resultados dessas três classificações. Recordandoque esse método só é aplicado para um par de classificadores, isto é, duas classificações,essa análise foi feita três vezes, entre o Perceptron Linear e o Perceptron de MúltiplasCamadas exposta na Tabela 5, Perceptron de Múltiplas Camadas e Fuzzy representada naTabela 6, e por fim, Perceptron Linear e Fuzzy exposta na Tabela 7.
50 Capítulo 4. Resultados
Tabela 5 – Índice Kappa entre o Perceptron Linear (LP) e o Perceptron de MúltiplasCamadas (MLP)
LP
MLP
Água Vegetação TOTALÁgua 668773 9618 678391
Vegetação 8489 876391 884880TOTAL 677262 886009 1563271
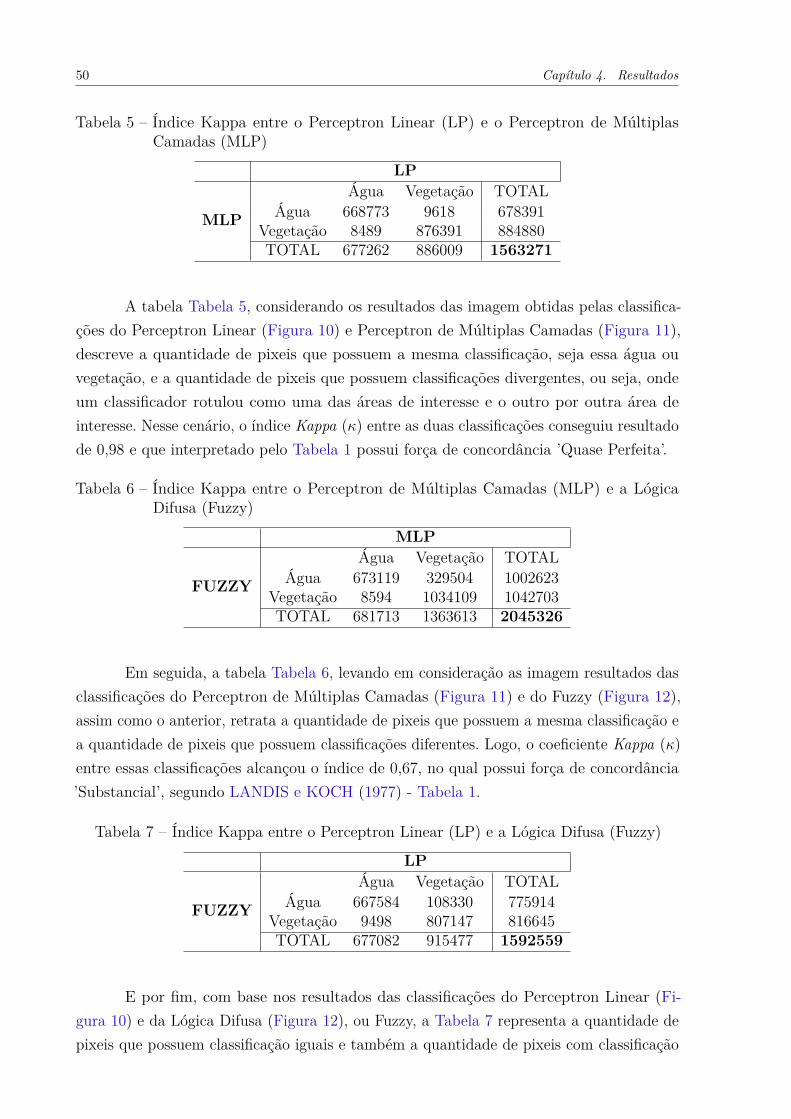
A tabela Tabela 5, considerando os resultados das imagem obtidas pelas classifica-ções do Perceptron Linear (Figura 10) e Perceptron de Múltiplas Camadas (Figura 11),descreve a quantidade de pixeis que possuem a mesma classificação, seja essa água ouvegetação, e a quantidade de pixeis que possuem classificações divergentes, ou seja, ondeum classificador rotulou como uma das áreas de interesse e o outro por outra área deinteresse. Nesse cenário, o índice Kappa (κ) entre as duas classificações conseguiu resultadode 0,98 e que interpretado pelo Tabela 1 possui força de concordância ’Quase Perfeita’.
Tabela 6 – Índice Kappa entre o Perceptron de Múltiplas Camadas (MLP) e a LógicaDifusa (Fuzzy)
MLP
FUZZY
Água Vegetação TOTALÁgua 673119 329504 1002623
Vegetação 8594 1034109 1042703TOTAL 681713 1363613 2045326
Em seguida, a tabela Tabela 6, levando em consideração as imagem resultados dasclassificações do Perceptron de Múltiplas Camadas (Figura 11) e do Fuzzy (Figura 12),assim como o anterior, retrata a quantidade de pixeis que possuem a mesma classificação ea quantidade de pixeis que possuem classificações diferentes. Logo, o coeficiente Kappa (κ)entre essas classificações alcançou o índice de 0,67, no qual possui força de concordância’Substancial’, segundo LANDIS e KOCH (1977) - Tabela 1.
Tabela 7 – Índice Kappa entre o Perceptron Linear (LP) e a Lógica Difusa (Fuzzy)
LP
FUZZY
Água Vegetação TOTALÁgua 667584 108330 775914
Vegetação 9498 807147 816645TOTAL 677082 915477 1592559
E por fim, com base nos resultados das classificações do Perceptron Linear (Fi-gura 10) e da Lógica Difusa (Figura 12), ou Fuzzy, a Tabela 7 representa a quantidade depixeis que possuem classificação iguais e também a quantidade de pixeis com classificação

51
desigual. Por consequência, essa análise comparativa de concordância recebeu o coeficientede 0,85, no qual pode ser considerado como força de concordância Almost Perfect, outraduzido para o português, ’Quase Perfeita’.

53
5 Conclusão
Os resultados deste trabalho mostram que a Redes Neurais Artificiais podem seruma alternativa muito viável como classificador de imagens, todavia, podem ser um poucoinstáveis com relação à resolução de problemas que não estejam bem modelados, torna-seassim uma técnica que requer tempo e conhecimento a priori sobre o problema, parapermitir escolher e calcular os descritores corretamente. E, ao decorrer deste trabalho,descobriu-se também que antes de escolher o algoritmo, a arquitetura, as funções deativação e outros aspectos referentes à Redes Neurais Artificiais, a análise de erros atravésde gráficos é uma boa prática e contribui para reduzir consideravelmente o tempo e esforçopara desenvolvimento do algoritmo adequadamente.
Já a classificação por meio da lógica Fuzzy possui uma aplicabilidade mais simples,isto é, possui um conceito genérico o que permite a representação de um problema demaneira mais rápida, por não precisar apresentar tantos artefatos de descrição para oproblema, ou seja, não manifesta uma necessidade tão grande de conhecimento do problemaquando comparado a técnica baseada em Redes Neurais Artificiais.
Como possíveis trabalhos futuros, a análise temporal de imagens, ou seja, a análisede classificações para uma sequência de imagens de diferentes épocas e características, aclassificação mais dinâmicos, que consigam ser aplicados para diversas áreas do pantanal,e a implementação híbrida, ou seja, a junção de diversas técnicas de classificação em umsó classificador.
Em suma, os resultados atingidos neste trabalho foram consideráveis, permitindoobter, aproximadamente, 90% de acerto em todas as hipóteses de classificadores. Dosquais, todos possuíram uma concordância de classificação média de 0,83 que denota umconsentimento substancial.

55
Referências
ABAR, C. Noções de Lógica Matemática. 2004. Acesso em: 15 Março de 2016. Disponívelem: <http://www.pucsp.br/~logica/>. Citado na página 29.
ABELLERA, L. V.; STENSTROM, M. K. Assessing the accuracy of satellite imageclassifications for pollutant loadings estimation. International Society for Photogrammetryand Remote Sensing, 2012. Citado na página 26.
ALBUQUERQUE, V. H. C. et al. Evaluation of multilayer perceptron and self-organizingmap neural network topologies applied on microstructure segmentation frommetallographic images. NDT & E International, ISSN: 0963-8695, Elsevier, Issue 7, v. 42,p. 644–651, out 2009. Citado na página 37.
ANDRADE, L. N. et al. Redes neurais artificiais (rna) aplicadas à classificação de Áreascafeeiras na região de três pontas-mg. Anais XV Simpósio Brasileiro de SensoriamentoRemoto - SBSR, Curitiba, PR, Brasil, 30 de abril a 05 de maio de 2011, INPE, p. 7603,2011. Citado na página 32.
APPLE. IOS SIRI. 2016. Acesso em: 25 de Setembro de 2016. Disponível em:<http://www.apple.com/ios/siri/>. Citado na página 27.
ARAUJO, A. F.; CONSTANTINOU, C. E.; TAVARES, M. R. S. New artificial life modelfor image enhancement. expert systems with applications. Applications,/j.eswa.2014.03.029,ISSN: 0957-4174, Elsevier, Issue 13, v. 41, p. 5892–5906, out 2014. Citado na página 32.
BENEDITO, R. M. et al. Intelligent Data Analysis For Real-life Applications: Theory andPractice. [S.l.]: Informations Science Reference, 2012. Citado na página 27.
BLACKBRIDGE. Satellite Imagery: Product Specifications. BlackBridge, Version 6.1.2015. Acesso em: 15 de Março de 2016. Disponível em: <http://www.blackbridge.com/rapideye/upload/RE_Product_Specifications_ENG.pdf>. Citado na página 33.
BRAGA, A. P.; CARVALHO, A. P. L. F.; LUDEMIR, T. B. Redes Neurais Artificiais:Teoria e Aplicaçôes. [S.l.]: LTC, 2012. Citado 5 vezes nas páginas 28, 29, 32, 37 e 41.
CAMPBELL, J. B.; WYNNE, R. H. Introduction to Remote Sensing. [S.l.]: The GuilfordPress, 2011. Citado 2 vezes nas páginas 32 e 33.
CARLSON, T. B.; RIPLEY, D. A. On the relation between ndvi, fractional vegetationcover, and leaf area index. Remote Sensing of Environment, 1997. Citado na página 34.
CC. Creative Commons, Open Source Initiative (OSI), The Open Source Definition (OSD).2013. Acesso em: 30 de Agosto de 2015. Disponível em: <http://opensource.org/definition>.Citado na página 37.
COHEN, J. A coefficient of agreement for nominal scales. Educ Psychol Meas, p. 20:31–46,1960. Citado na página 35.
56 Referências
CRACKNELL, M. J.; READING, A. M. Geological mapping using remote sensing data:A comparison of five machine learning algorithms, their response to variations in thespatial distribution of training data and the use of explicit spatial information. Computerand Geosciences, Elsevier, 2015. Citado na página 26.
DENG, Y. et al. Rndsi: A ratio normalizeed difference soil index for remote sensing ofurban/suburban enviroments. International Journal of Applied Earth Observation andGeoinformation, 2015. Citado na página 36.
DU, X.; WANG, J. J. Support image set machine: jointly learning representation andclassifier for image ser classification. Elsevier: Knowledge-Based Systems, v. 78, p. 51–58,2015. Citado na página 32.
ELAALEM, M. M. et al. Performance of supervised classification for mapping land coverand land use in jeffara plain of libya. International Conference on Food and AgriculturalSciences., v. 55, 2013. Citado na página 32.
FERRREIRA, L. G.; FERREIRA, N. C.; FERREIRA, M. E. Sensoriamento remoto davegetação: evolução e estado-da-arte. Acta Sci. Biol. Sci, v. 30, n. 4, p. 379-390, 2008.Citado na página 35.
FISHER, A. Inside Google’s Quest to Popularize Self-Driving Cars. 2013.Popular Science. Acesso em: 25 de Setembro de 2016. Disponível em: <http://www.popsci.com/cars/article/2013-09/google-self-driving-car>. Citado na página 27.
FRANÇA, A. F.; TAVARES, J. R.; MOREIRA, J. C. C. Índices ndvi, ndwi e ndbi comoferramentas ao mapeamento temático do entorno da lagoa olho d’gua, em jaboatão dosguararapes pe. Simpósio Brasileiro de Ciências Geodésicas e Tecnologia da Geoinformação,Recife PE, 2012. Citado 2 vezes nas páginas 26 e 34.
FUCCI, R. R. et al. Classificação de imagens do pantanal usando redes neuraisartificiais mlp e perceptron linear. IBERIAN LATIN AMERICAN CONGRESS ONCOMPUTATIONAL METHODS IN ENGINEERING, v. 36, 2015. Proceedings... Rio deJaneiro: ABEMEC. Citado na página 25.
GAO, B. Ndwi - a normalized difference water index for remote sensing of vegetationliquid water from space. Remote Sensing of Environment, 1996. Citado na página 35.
GIONGO, P. R.; PADOVANI, C. R.; VETORAZZI, C. A. Variabilidade espacial etemporal do albedo obtido a partir de imagens modis na região do pantanal. Anais XIVSimpósio Brasileiro de Sensoriamento Remoto, Natal, Brasil, 25-30 abril 2009, INPE, p.4715-4722., 2009. Citado na página 25.
GOMEZ, D.; MONTERO, J. Determining the accuracy in image supervised classificationproblems. EUSFLAT-LFA, 2011. Citado 2 vezes nas páginas 36 e 37.
GONZALEZ, R. C.; WOODS, R. E. Digital Image Processing. [S.l.]: Prentice Hall, 2008.Citado 3 vezes nas páginas 30, 31 e 34.
GOOGLE. Google Self-Driving Car Project. 2016. Acesso em: 25 de Setembro de 2016.Disponível em: <https://www.google.com/selfdrivingcar/where/>. Citado na página 27.
HAYKIN, S. Redes Neurais: Princípios e Práticas. 2. ed. [S.l.]: Bookmen, 2001. Citadona página 28.
Referências 57
HOREWICZ, M. C.; NASCIMENTO, C. L.; PERELLA, W. J. Reconhecimento demodulação digital de sinais de comunicações. II Simpósio de aplicações operacionais emÁreas de Defesas (SIGE) Maj Correa, Brasília-DF., 2008. Citado na página 37.
JAYANTH, J.; KOLIWAD, S.; KUMAR, T. A. Classification of remote sensed datausing artificial bee colony algorithm. The Egyptian Journal of Remote Sensing and SpaceScience, Elsevier., 2015. Citado na página 26.
KAMBLE, P. M.; HEGARDI, R. S. Handwritten marathi character recognition usingr-hog feature. International Conference on Advanced Computing Technologies andApplications (ICACTA), Elsevier., 2015. Citado na página 32.
KOUTANAEI, F. N.; SAJEDI, H.; KHANBABAEI, M. A hybrid data mining modelo ffeature selection algorithm and ensemble learning classifiers for credit scoring. Journal ofRetailing and Consumer Services., v. 27, p. 11–23, nov 2015. Citado na página 32.
KUSAKUNNIRAN, W. et al. Cross-view and multi-view gait recognitions based on viewtransformation model using multi-layer perceptron. Pattern Recognition Letters, Issue 7,v. 33, p. 882–889, 2002. Citado na página 37.
LANDIS, J. R.; KOCH, G. G. The measurament of observer agreementfor categoricaldata. Biometrics, 1977. Citado 3 vezes nas páginas 35, 36 e 50.
LEE, Y. et al. Performance testing of several classifier for defferentiating obstructive lungsdiseases based on texture analysis at high-resolution computerizes tomography (hrct).Elsevier: Computer Methods and Programs in Biomedicine 93 (206-215)., 2009. Citadona página 32.
LILLESAND, T. M.; KIEFFER, R. W. Remote Sensing and Image Interpretation. 6. ed.[S.l.]: Hardcover„ 2007. Citado 3 vezes nas páginas 26, 32 e 34.
MA, Z.; JORGE, M. R. S.; MASCARENHAS, T. A review of algorithms for medicalimage segmentation and their applications to the female pelvic cavity. Computer Methodsin Biomechanics and Biomedical Engineering, ISSN: 1025-5842 (print) - 1476-8259(online), Taylor & Francis, DOI: 10.1080/10255840903131878, Issue 2., v. 13, p. 235–246,2010. Citado na página 32.
MAHMON, N. A.; YA’ACOB, N. A review on classification of satellite image usingartificial neural network (ann). IEEE 5th Control and System Graduate ResearchColloquium, 11-12, UiTM, Shah Alam, Malaysia., 2014. Citado na página 32.
MARIANO, R. B. et al. Variabilidade espaÇo temporal do evi e do fluxo de calor nosolo no sertÃo de pernambuco com base em imagens do modis/terra. XVII CongressoBrasileiro de Agrometeorologia, 2011. Citado na página 35.
MATHWORKS. Fuzzy Logic Toolbox. 2016. User’s Guide (R2016a). Acesso em: 10 deJulho de 2016. Disponível em: <http://www.mathworks.com/products/fuzzy-logic/>.Citado na página 37.
MATHWORKS. Image Processing and Computer Vision Tooboxes. 2016. User’sGuide (R2016a). Acesso em: 10 de Julho de 2016. Disponível em: <http://www.mathworks.com/solutions/image-video-processing/>. Citado na página 37.
58 Referências
MCCULLOCH, W. S.; PITTS, W. A logical calculus of the ideas immanent in nervousactivity. Bulletin of Mathematical Biophysics, 1943. Citado na página 28.
MICROSOFT. Cortana. 2016. Acesso em: 25 de Setembro de 2016. Disponível em:<https://developer.microsoft.com/pt-br/cortana>. Citado na página 27.
MINSKY, M.; PAPERT, S. Perceptron: An introduction to computational geometry. MITpress, 1969. Citado na página 29.
NOVO, E. M. L. M. Sensoriamento Remoto: Princípios e Aplicaçôes. 2. ed. [S.l.]: EdgardBlucher, 1992. Citado na página 33.
NOVO, E. M. L. M. Sensoriamento Remoto: Princípios e Aplicaçôes. 3. ed. [S.l.]: EdgardBlucher, 2008. Citado na página 34.
ORACLE. Legal Notices: Pravicy, Terms of Use, Copyright, Trademarks, Logos. 2014.Acesso em: 30 de Agosto de 2015. Disponível em: <http://www.oracle.com/us/legal/terms/index.html>. Citado na página 37.
PISANI, R. J. et al. Land use classification using optimum-path forest. Anais XIVSimpósio Brasileiro de Sensoriamento Remoto, Natal, Brasil, 25-30 abril, INPE, p.7063-7070., 2009. Citado na página 33.
RESENDE, E. K. et al. Biologia da tuvira, gymnotus cf. carapo (pisces, gymnotidae)no baixo rio negro, pantanal, mato grosso do sul, brasil. Boletim de Pesquisa eDesenvolvimento / Embrapa Pantanal, ISSN 1679-026X; 67), 2006. Citado na página 25.
RICHERT, W.; COELHO, L. P. Building Machine Learning Systems with Python. [S.l.]:PacktPub„ 2013. Citado na página 32.
ROSENBLATT, F. The perceptron: A probabilistica model for informations storage andorganization in the brain. Psychol, v. 65, p. 386–408, 1958. Citado na página 28.
RUSSEL, S.; NORVIG, P. Inteligência Artificial, tradução da Terceira Edição. [S.l.]:Editora Campus ISBN 9788535237016, 2013. Citado 3 vezes nas páginas 27, 28 e 29.
SCHNEIDER, S. R.; MCGINNIS, D. F. The noaa avhrr: A new sensor for monitoringcrop growth. Proceedings of Machine Processing of Remotely Sensed Data Symposium,LARS, West Lafayette.lndiana, p. 281002E., 1982. Citado na página 34.
SEVARAC, Z. Neural Networks on the NetBeans Platform. 2011. Acesso em: 20 deAgosto de 2015. Disponível em: <http://www.oracle.com/technetwork/articles/java/nbneural-317387.html>. Citado na página 37.
SHWETHA, H. R.; KUMAR, D. N. Prediction of land surface temperature under cloudyconditions using microwave remote sensing and ann. Internetional Conference on WaterResources, Coastal and Ocean Engineering (ICWRCOE 2015), Elsevier., 2015. Citado 2vezes nas páginas 26 e 32.
SILVA, R. A. C.; SILVA, C. Inteligência artificial aplicada à ambientes de engenharia desoftware: Uma visão geral. Universidade Federal de Viçosa, 2005. Citado na página 29.
SOUZA, C. A.; LANI, J. L.; SOUZA, J. B. Origem e evolução do pantanal mato-grossense.Simpósio Nacional de Geomorfologia / Regional Conference on Geomorphology., 2006.Citado na página 25.
Referências 59
SZELISKI, R. Computer Vision: Algorithms and Applications. [S.l.]: Springer, 2010.Citado 2 vezes nas páginas 30 e 31.
TURING, A. Computing machinery and inteligence. Mind, 1950. Citado na página 27.
VLASSELAER, V. V. A novel approach for automated credit card transaction frauddetection using network-based extensions. Decision Support Systems, v. 75, p. 38–48, jul2015. Citado na página 32.
VO, T.; TRAN, D.; MA, A. Tensor decomposition and application in image classificationwith histogram of oriented gradients. Neurocomputing, Elsevier, 2015. Citado na página32.
WENG, Q. Remote sensing and gis interation: Theories, methods, and applications. TheMcGraw-Hill Companies, 2010. Citado 2 vezes nas páginas 32 e 33.