capítulo 3 –transmissão de sinais e filtragem · elementos que armazenam energia e outros...
TRANSCRIPT

Capítulo 3 – Transmissão de Sinais e Filtragem3.1 Resposta de Sistemas Lineares Invariantes no Tempo
No diagrama de blocos da Figura 3.1-1, x(t) é o sinal de entrada e y(t) é o sinal de saída.
Elementos que armazenam energia e outros efeitos internos podem alterar o formato da forma de onda da entrada para a saída.
Independentemente do que há dentro do bloco, o sistema é caracterizado por uma relação excitação-resposta entre a entrada e a saída.
Neste capítulo existe interesse em estudar a classe de sistemas lineares e invariantes no tempo (SLIT).
Resposta ao Impulso e Integral de Superposição
Considera-se que o Sistema Linear Invariante no Tempo (SLIT) não tenha energia armazenada no instante em que o sinal de entrada x(t) é aplicado.
Portanto, a saída y(t) é a resposta forçada devido exclusivamente à entrada x(t), ou seja:
Linearidade: num SLIT, a eq. (3.1-1) obedece ao princípio de superposição de efeitos, ou seja, se
onde ak são constantes no tempo, então, resulta em
Invariância no tempo: num SLIT as características do sistema permanecem fixas com o tempo, e assim, uma entrada deslocada no tempo x(t−td) produz
tal que, a saída também é deslocada no tempo (tem um delay), mas sua forma permanece inalterada.
])([)( =k
kk txaFty
F é operador linear
superposição de entradas individuais
superposição de saídas individuais
Resposta temporal de um SLIT
A maioria dos SLITs consistem de elementos a parâmetros concentrados (como resistores, capacitores e indutores).
A análise direta de um tal sistema, a partir das equações constitutivas de seus elementos, conduz a uma relação de entrada-saída, y = F(x), na forma de equação diferencial linear:
onde an e bn são coeficientes constantes envolvendo os valores dos elementos.
O número de elementos independentes armazenadores de energia estabelecem o valor de n, conhecido como ordem do sistema.
Existe alguma dificuldade de se extrair a expressão de y(t) a partir de (3.1- 4), escrita implicitamente em termos de uma dada entrada x(t).
Portanto, em princípio, a equação deve ser resolvida individualmente para cada nova entrada x(t): para cada x(t), altera-se a equação e, para cada uma existe uma caminho diferente para se atingir a solução.
Procurar-se-á uma forma mais simples de se escrever y(t) explicita e diretamente em termos de x(t)!
Recordando a propriedade de amostragem (2.5-7) de δ(t), qual seja: , pode-se escrever (3.1-1) em termos da integral de convolução:
(A comutação acima é permitida pela linearidade do sistema: a propriedade de superposição.)
Definição: função resposta impulsiva de um SLIT
Quando a entrada do sistema é x(t)=δ(t), a saída y(t) é representada por h(t), tal que:
Recordando que o SLIT é invariante no tempo:
e então
na qual se recorreu à propriedade comutativa da convolução.
Operador sobre a integral
Integral do operador
_____________________________________________________o operador atua sobre sinais temporais

Integral de superposição:
Resposta forçada de um SLIT: convolução da entrada x(t) com a resposta impulsiva h(t), ou seja:
Como esta relação é válida para qualquer que seja x(t), conclui-se que o SLIT pode ser completamente caracterizado por sua resposta impulsiva.__________________________________________________________________Pergunta: como se determina h(t)?
Sugestão: usar x(t)=u(t) e determinar a resposta ao degrau:
e, em seguida, calcular:
__________________________________________________________________Prova: Dado x(t)=u(t) e (3.1-7a), então, de (3.1-6c): .
Usando , vem:
(6c)
Exemplo 3.1-1: Resposta temporal de um sistema de primeira ordem
Circuito RC como filtro passa-baixa.
A equação diferencial do circuito é:
Resposta ao degrau, x(t)=u(t) y(t)=g(t) = F[u(t)]:
O capacitor começa com tensão inicial nula e se carrega em direção a g(∞) =1 com constante de tempo RC.
A resposta impulsiva é obtida a partir de:
dttdyCti )()( =
)()()( txtytRi =+
(primeira ordem)
(continua...)
(mostrar isto: usar T. Laplace)
i(t)

g(t) e h(t) são causais pois x(t)=0 para t <0.
____________________________________________________Considere-se agora a resposta do circuito RC à uma função porta/ pulso retangular, causal e de largura τ (o qual poderá assumir diferentes valores):
0 τ t
A
x(t)
<<
= outside0
0for)(
τtAtx
Resposta ao degrau
Resposta impulsiva
RC é fixado, τ é variável.
dttdgth )()( =
(continua...)
aplicar a regra da cadeia
mostrar isto!
= ?
h(λ)x(-λ)
0
t=0
0<t<τ
λ
λ
λ
λ
0
0
0
t=τ
t
t=τ
t
t >τ
[ ] )1()(1 /0
/
0
/ RCttRCt RC eAeRCRCAde
RCA −−− −=−= λλ λ
[ ]RCtRC
RCtRCttt
RCt
t
RC
eeA
eeAeAdeRC
A
/)(/
/)(///
)1(
][1
ττ
ττ
λτ
λ λ
−−−
−−−−
−
−
−
−=
−−=−=
Cálculo da convolução: , ou
*Convolução nula para t < 0
*Convolução para 0 < t < τ
*Convolução para t > τ
)(1)( / tueRC
th RCt−=0 τ
tA
x(t)
(continua...)
_____________________________________________________
sem superposição
superposição parcial
superposição total

Para τ >>RC Para τ ≈ RC
Para τ <<RC
X(f) com grande largura de banda.X(f) com muito conteúdo de alta
frequência.Filtragem da maior parte do espectro.Distorção severa do sinal de entrada.
X(f) com pequena largura de banda.
X(f) com pouco conteúdo de alta frequência.
Filtragem das altas frequências,próximas às descontinuidades.
Pouca distorção do sinal de entrada.
X(f) com conteúdo espectral médio nas altas frequências.
Distorção do sinal de entrada.
Interpretação: filtro passa baixa
0 τ t
Ax(t)
constante RC fixa, sinal de entrada variável (τ varia)
variar τ
Resposta em Frequência
A análise no domínio do tempo torna-se difícil para sistemas de ordem superior, e, as complicações matemáticas tendem a obscurecer os resultados significantes.
A análise no domínio da frequência constitui uma ferramenta alternativa que pode proporcionar um ponto de vista mais claro da resposta do SLIT.
Definição: função resposta em frequência de um SLIT, H(f) (≠ função de transferência, H(s))
Trata-se da TF da reposta impulsiva:
Quando h(t) é uma função temporal real, H(f) exibe simetria hermitiana
ou seja: ___________________________________________
Interpretação de H(f) : para . )()()( 0 tx
tyfH = tfjetx 02)( π= (Estranho?? Ver discussão a seguir)
(continua...)
função da frequência funções do tempo

_____________________________________________________Prova: considera-se o caso geral, onde a entrada é dada por
(A afirmação de que (3.1-12a) aplica-se para todos os tempos significa que se opera em regime permanente.)
A saída é obtida aplicando-se e usando (3.1-10):
tal que H(f0) = H(f) para f = f0.________________________________________________________________________________________________________________________________________
Convertendo H(f0) para a forma polar, tem-se:
sendo e
)()( 0 txfH=
)()()( 0 tx
tyfH = tfjetx 02)( π=para
c.q.d.
integral em λ
Interpretação de H(f) :
H(f) em f=f0
por definição
(continua...)
)()()( 0 tx
tyfH =
fasor girante elementar
______________________________________________________________________________Resposta em frequência:
Considere-se um entrada dada por:
ou, na forma de fasores conjugados:
Aplicando-se (3.1.12b) e (3.1-13), em conjunto o princípio de superposição:
ou
Portanto: para e
2)(
00 22 tfjjtfjj
xeeeeAtx
xx πφπφ −−+=
22)()(
000000 222)](arg[2)](arg[
0
tfjjtfjj
y
tfjfHjtfjfHj
xeeeeAeeeefHAty
yyxx πφπφπφπφ −−−+−+ +=+=
2)()(
2)()(
)(
0000
0000
2)(arg0
2)(arg0
2)(arg0
2)(arg0
tfjjfHjtfjjfHj
x
tfjjfHjtfjjfHj
x
eeefHeeefHA
eeefHeeefHAty
xx
xx
πφπφ
πφπφ
−−−
−−−
+=
−+=
usando (3.1-11b)
usando (3.1-13)
(continua...)
Resumo:

A razão é válida para qualquer frequência f0 |H(f)| é o gráfico de ganho.
Da mesma forma, a defasagem arg H(f) é o gráfico de fase.
Ganho em dB:
Fase em graus (degrees):
xy AAfH /log20)(log20 10010 =
___________________________________
xyfH φφ −=)(arg 0
Resumo:
Diagrama de Bode:
Resposta em frequência: análise no domínio espectral
Relembrando o teorema da convolução, se , então:
a qual constitui a base da análise no domínio da frequência.
Permite usar operações matemáticas simples:
Se x(t) for um sinal de energia, então, y(t) também o será, tal que:
(densidade espectral de energia)
(energia total – teorema da energia de Rayleigh)
____________________________________________
Corolário: Fica estabelecido um novo par de transformada de Fourier:
Prova: se x(t)=δ(t) ↔ X(f)=1; portanto, aplicando (3.1-14) resulta: Y(f) = H(f).1 = H(f) ↔ y(t) = h(t), de acordo com a definição.
Ponto de vista do domínio da frequência: o espectro plano de X(f)=1 contém todas as frequênciasem igual proporção e, consequentemente, o espectro de saída Y(f) assume a forma de H(f) .
)( fGy=
+∞
∞−= dffGy )(
(continua...)
1−ℑ

Resumo:
Uma vez conhecidos H(f) e X(f), a saída também pode ser determinada, através de:
Infelizmente a integração acima pode ser tão difícil quanto a integral de convolução.
A eficácia da análise de sistemas no domínio da frequência está em se poder inferir sobre as caracterís-ticas do sinal de saída sem precisar sair deste domínio. #
( 2 ) ( ) ( ) ( )RC j f Y f Y f X fπ + =
#21
1)()()(
RCfjfXfYfH
π+==
Formas de se determinar H(f) sem envolver h(t):
a) Conhecendo-se a equação diferencial do sistema
aplica-se a TF (2.3-8), ou seja:
para se obter [ ]:
___________________________________________Exemplo: filtro RC passa-baixa
)()()(
fXfYfH =
(sem a necessidade de se calcular h(t))

b) Aplicar a transformada de Laplace e substituir s=σ +jω por s=j2πf
#
________________________________________________________________c) Calcular a resposta do sistema ao fasor elementar em regime permanente, usando
Como foi visto anteriormente, a resposta deve ser do tipo , onde Ay é um coeficiente a ser determinado.
Substituindo-se y(t) na equação diferencial:
a partir da qual se extrai: →
#
)()()1( sXsYsRC =+
RCssXsYsH
+==
11
)()()(
RCfjfH
π211)(
+=
ftjyeAty π2)( =
ftjftjy
ftjy eeAefjRCA ππππ 222)2( =+
1)12( =+fRCjAy π
)(211)()( 2 tx
RCfjtxAeAty y
ftjy π
π
+===
RCfjtxtyfH
π211
)()()(
+==
)12/(1 += fRCjAy π
d) A resposta do sistema ao fasor em regime permanente pode ser determinada usando-se
Este método corresponde à análise de impedâncias (Z) em circuitos elétricos:
Entrada: → fasor: X = Ax arg(φx) = 1 arg(0) = 1 0 (a frequência ω fica implícita)
Saída: → fasor: Y = Ay arg(φy) = Ay φy
A solução de circuitos elétricos baseia-se na impedância, razão entre entrada e saída:
Sabe-se que:
→ c.q.d.
(ver exemplo de aplicação a seguir)
tjtjjx eeeAtx x ωωφ .1)( ==
tjjy eeAty y ωφ=)(
.1 0 arg( )y yY Z Y ZX Z Z AX
φ= → = = ∠ = =
)(arg0)(arg)(arge)(1.)()( fHfHfHfHfHAfHA xyxy =+=+==== φφ
)()(arg)( fHfHfHZ ==
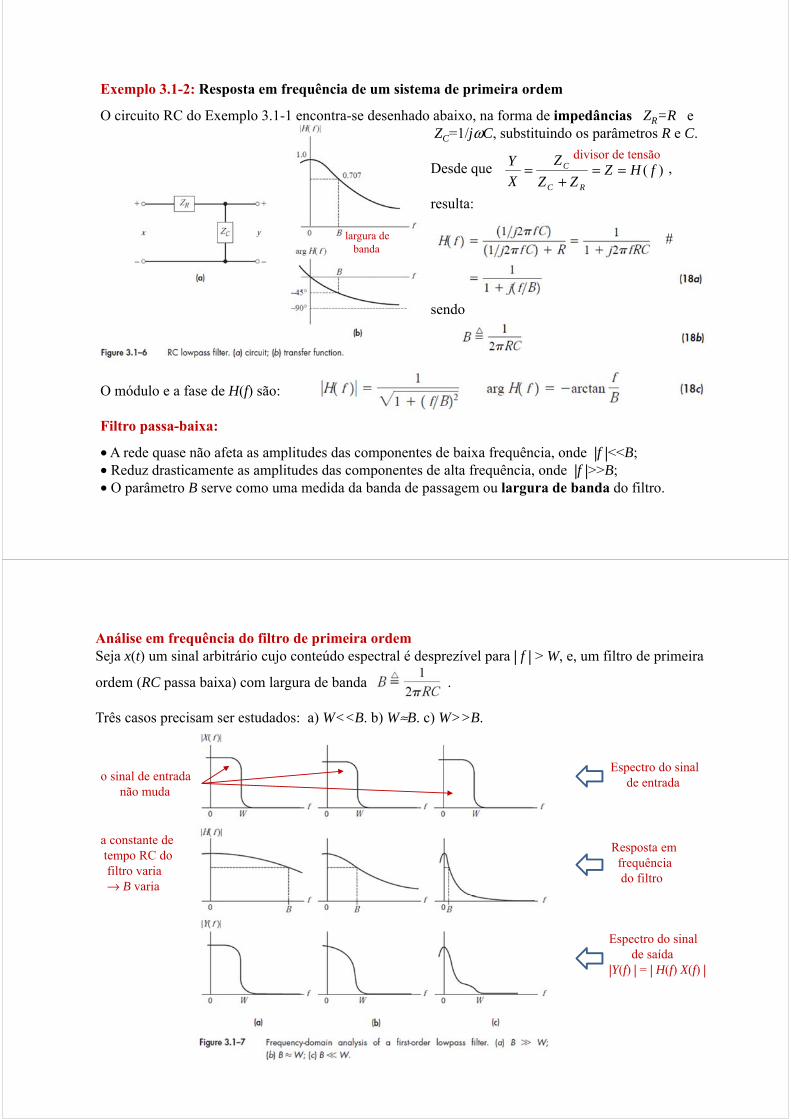
Exemplo 3.1-2: Resposta em frequência de um sistema de primeira ordem
O circuito RC do Exemplo 3.1-1 encontra-se desenhado abaixo, na forma de impedâncias ZR=R e ZC=1/jωC, substituindo os parâmetros R e C.
Desde que ,
resulta:
#
sendo
O módulo e a fase de H(f) são:
Filtro passa-baixa:
• A rede quase não afeta as amplitudes das componentes de baixa frequência, onde |f |<<B;• Reduz drasticamente as amplitudes das componentes de alta frequência, onde |f |>>B;• O parâmetro B serve como uma medida da banda de passagem ou largura de banda do filtro.
)( fHZZZ
ZXY
RC
C ==+
=divisor de tensão
largura debanda
Análise em frequência do filtro de primeira ordemSeja x(t) um sinal arbitrário cujo conteúdo espectral é desprezível para | f | > W, e, um filtro de primeira
ordem (RC passa baixa) com largura de banda .
Três casos precisam ser estudados: a) W<<B. b) W≈B. c) W>>B.
a)o sinal de entrada
não muda
a constante de tempo RC do filtro varia→ B varia
Espectro do sinalde entrada
Resposta emfrequênciado filtro
Espectro do sinalde saída
|Y(f) | = | H(f) X(f) |

Caso a) W<<B.
|H(f)| ≈ 1 e arg H(f) ≈ 0 na banda | f | < W
Y(f) = H(f) X(f) ≈ X(f) y(t) ≈ x(t)
Ocorre transmissão sem distorção através do filtro.
___________________________________________
x(t)
0 t
y(t)
0 t
τ
τ
Exemplo: pulso retangular de largura τ
Banda de sinal: W=1/τ
Se W<<B 1/τ<<1/(2πRC) τ/RC >> 1, RC << τ
Constante RC pequena: o circuito responde rapidamente ao sinal de entrada.
(continua...)
capítulo2
RC pequeno
Domínio espectral
1
Caso b) W≈ B (aumentando-se RC).
A largura de banda B diminuiu.
Y(f) depende de H(f) e X(f) [i.e. Y(f) = H(f) X(f) ].
A saída é distorcida (por ação de filtragem).
A saída y(t) difere da entrada x(t)__________________________________________
x(t)
0 t
y(t)
0 t
τ
τ
(continua...)
Domínio espectral
Domínio temporal
Pulso de entrada do filtro
Versão distorcida do sinal de entrada

Caso c) W>>B (aumentando-se RC ainda mais).
O espectro da entrada tem valor aproximadamenteconstante, X(0), para | f | < B.
Assim, Y(f) ≈ H(f) X(0) y(t) ≈ X(0) h(t)
O sinal de saída se parece com a resposta impulsiva.___________________________________________
x(t)
0 t
y(t)
0 t
X(0)
τ
τ
Neste caso, o sinal de entrada pode ser modelado aproximadamente como um impulso.
W=1/τ >> B
Ocorre τ/RC <<1, RC >>τ.Constante RC grande: o circuito
responde lentamente ao sinal de entrada.
X(0) é ≅ constante
Domínio espectral
Domínio temporal
Recordação:
resposta impulsiva
resposta ao pulso, caso τ <<RC
Conforme visto no Exemplo 3.1-1:
________________________________________________________Conforme visto ainda há pouco (e também no Exemplo 3.1-1):
RC >>τ

Análise de diagrama de blocos
Funções H(f) para operações primitivas no domínio do tempo:
Associação de blocos
Hipótese: os efeitos de carregamento já estão incorporados em cada bloco H(f).
(Um simples seguidor de tensão com amplificador operacional pode ser usado para proporcionar isolação entre os blocos e evitar o carregamento.)
Associações básicas:
Negativefeedback

Exemplo 3.1-3: Zero-Order Hold (segurador de ordem zero)Bloco 1
Bloco 2
Bloco 3
Associação paralela entre blocos 1 e 2:
Bloco 1 = caminho diretoBloco 2 = retardo TBloco 3 = integrador
Associação série entre H12 e H3:
, uma função sinc em frequência. (continua...)
Exemplo 3.1-3: Zero-Order Hold
Análise alternativa: obtenção de H(f) a partir de h(t)
Por definição, y(t)=h(t) quando x(t)=δ(t),e então,
O sinal de saída y(t)=h(t) é obtido integrando-se esta última expressão:
ou então
Usando o teorema do retardo (2.3-2):
e a TF do sinc:
obtém-se o resultado anterior: H(f) #
)(tx
)( Ttx −
(pulso de largura T)
fTTTt sinc)/( ↔Π