bo 1j :2=1'• - eng.uerj.br · uma impressora utiliza um feixe de laser para imprimir rapida....
TRANSCRIPT
76 Sistemas de Controle Modernos
c?nt:ole co.m retroa~ão. Isto foi feito através do des~J:vo~vime~to do conceito de funçã~ de transt renc1a de Sistemas lmeares e da relação entre as vanave1s de Sistema sob a forma de diagramas ~ b_locos e d_e diagram~s d~ fluxo de sinal. Co~siderou-se a utilidade ?a simulaçã? em computador: Sistemas lineares e nao-lmeares para determmar a resposta de um Sistema em diversas situações .. volvendo valores de parâmetros e condições do ambiente. Finalmente, foi dada seqüência ao de~ volvimento do Sistema de Leitura de Acionador de Disco através da obtenção de um modelo sob f~rma de função de transferência do motor e do bríjço. 1
tKaoes:!- la~·. &. 1. 5(~ ·2';1) e ~femo.eA .1.J...5e A. . ..t.J6
fuo_a. ~COb : A .1.22 <:!... Á .J' 2.6(~~. ~) EXERCÍCIOS _______ ~------------------------~~-------------------(Os exercícios constituem aplicações diretas dos conceitos do capítulo.)
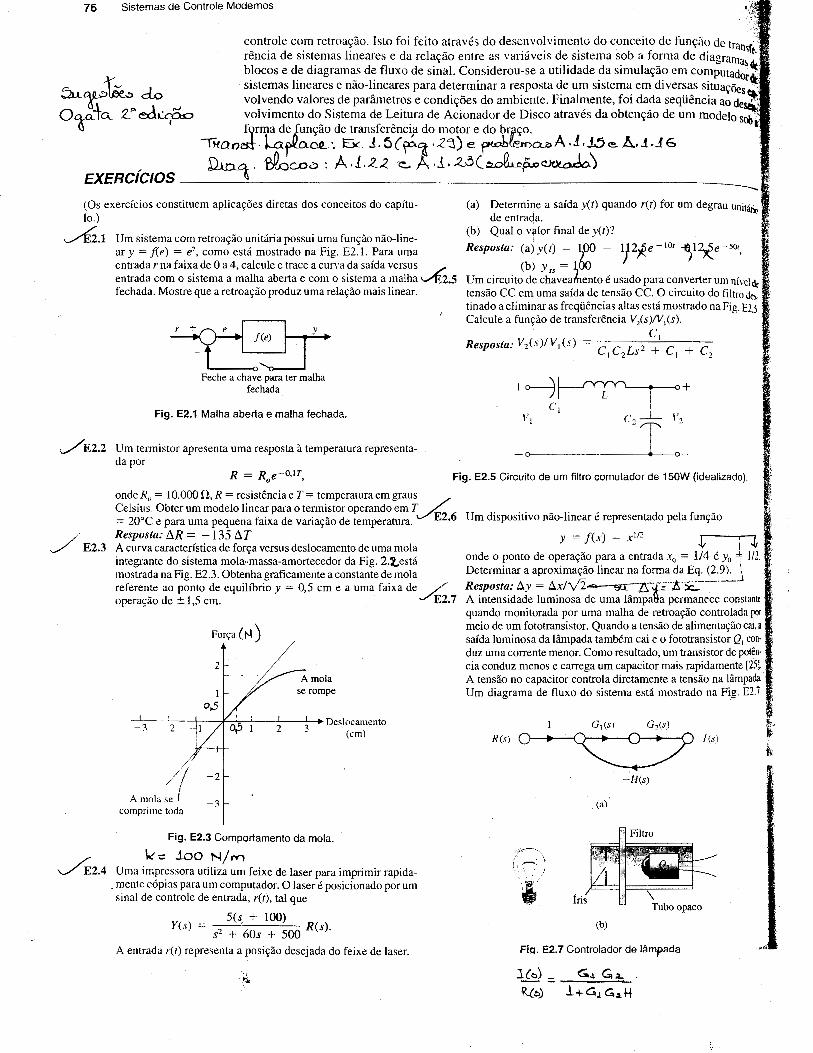
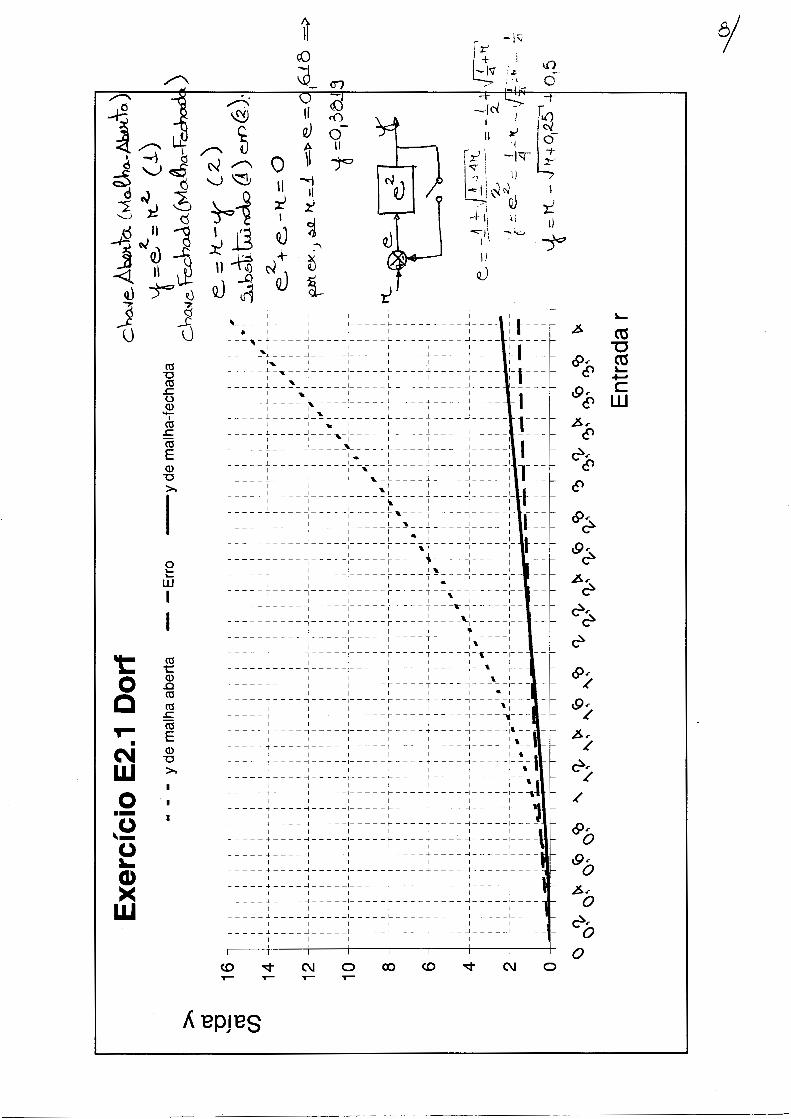
~.1 Um sistema com retroação unitária possui uma função não-line-ar y =fie) = e2
, como está mostrado na Fig. E2.1. Para uma entrada r na faixa de O a 4, calcule e trace a curva da saída versus / entrada com o sistema a malha aberta e com o sistema a malha V"E2.5 fechada. Mostre que a retroação produz uma relação mais linear.
1j :2=1'• Feche a chave para ter malha
fechada
Fig. E2.1 Malha aberta e malha fechada.
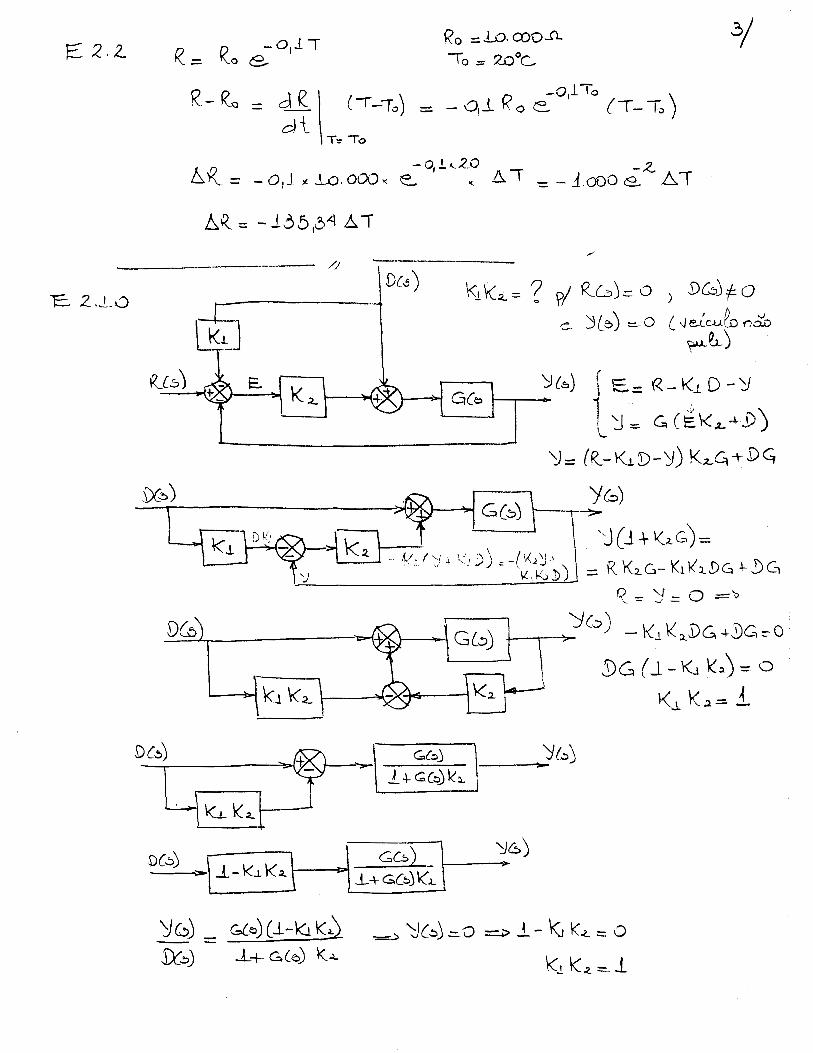
/E2.2 Um termistor apresenta uma resposta à temperatura representadapor
(a) Determine a saída y(t) quando r(t) for um degrau unit~ de entraqa.
(b) Qual o valor final de y(t)?
Resposta: (a}y(t):: 100- 1j2~e- 10' ~/Xe-5()', (b) Yss- \bo
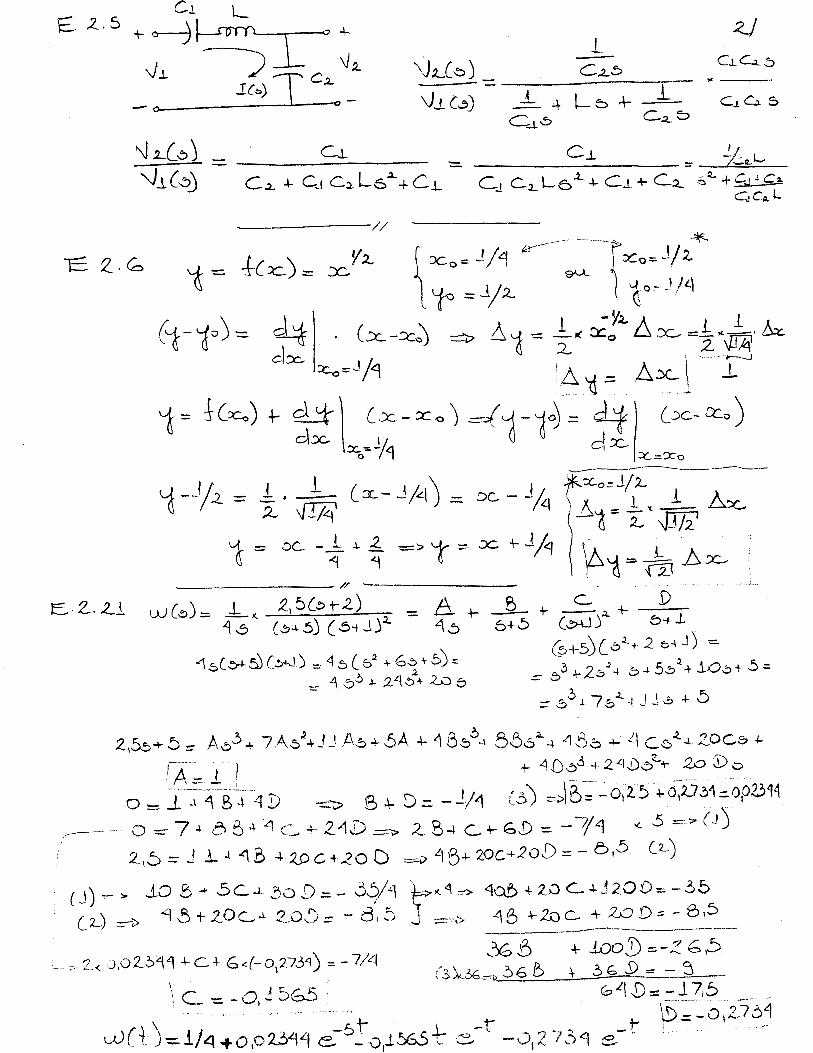
Um circuito de chavearhento é usado para converter um nível!k. tensão CC em uma saída de tensão CC. O circuito do filtro~ tinado a eliminar as freqüências altas está mostrado na Fig. E2.5 Calcule a função de transferência V2(s)/V1(s).
cl
R = R0 e-O,IT, Fig. E2.5 Circuito de um filtro comutador de 150W (idealizado).
~2.4
onde R0 = lO.OOOfl,R =resistência e T=:o temperatura em graus Celsius. Obter um modelo linear para o termistor operando em T / = zooc e para uma pequena faixa de variação de temperatura. -/E2.6 Um dispositivo não-linear é representado pela função
Resposta: b.R = -135 b.T A curva característica de força versus deslocamento de uma mola integrante do sistema mola-massa-amortecedor da Fig. 2.l;!stá mostrada na Fig. E2.3. Obtenha graficamente a constante de mola referente ao ponto de equilíbrio y "" 0,5 em e a uma faixa de~ operação de ± 1 ,5 em. E2. 7
// A mola se r
comprime toda
Força (t-1)
-2r -3r
Fig. E2.3 Comportamento da mola.
k: .ioo N/I'V1 Uma impressora utiliza um feixe de laser para imprimir rapida
. mente cópias para um computador. O laser é posicionado por um sinal de controle de entrada, r(t), tal que
5(.s: + 100) Y(s) = s2 + 60s + 500 R(s).
A entrada r(t) representa a posição desejada do feixe de laser.
y =f(x) = xl/2 ~
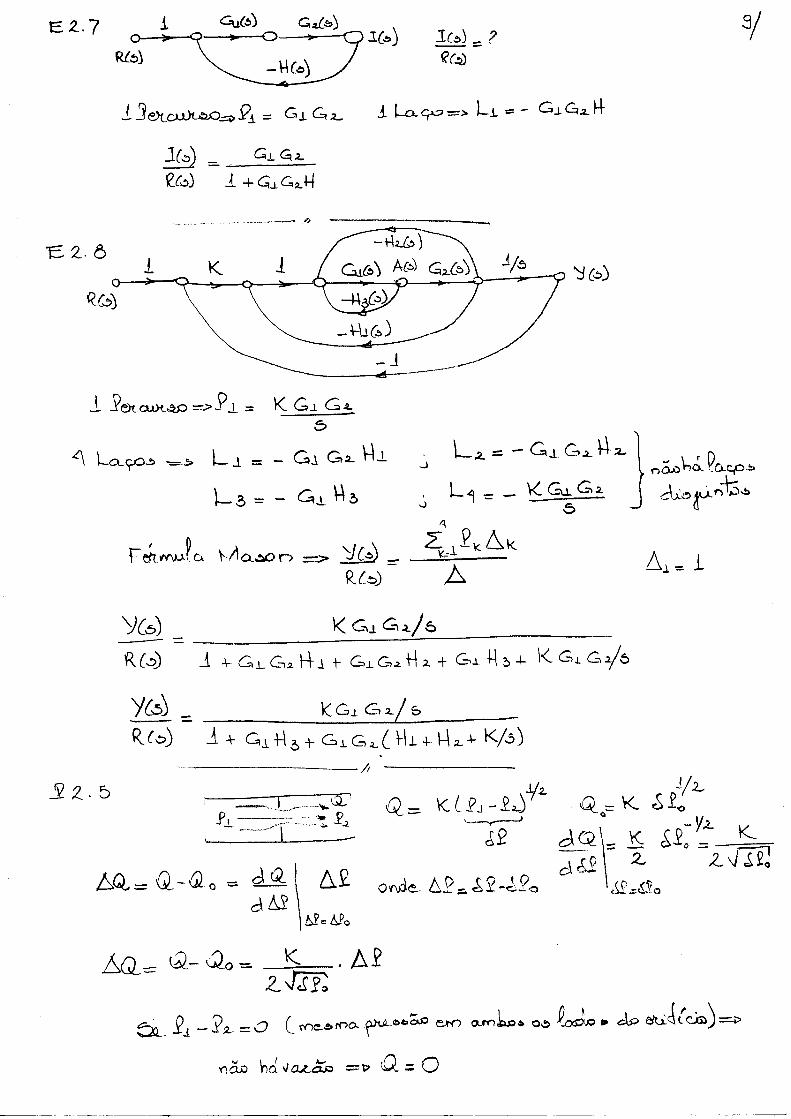
onde o ponto de operação para a entrada x0 = l/4_é !o i 1/2. Determinar a aproximação linear na forma da Eq. (2.9). j Resposta: b.y = b.xtV2~ '1,:;-t-x:_.------A intensidade luminosa de uma lâmpal:la permanece constante quando monitorada por uma malha de retroação controlada por meio de um fototransistor. Quando a tensão de alimentação cai, a saída luminosa da lâmpada também cai eu fototransistor Q1 con· duz uma corrente menor. Como resultado, um transistor de potên· cia conduz menos e carrega um capacitar mais rapidamente [25]. A tensão no capacitar controla diretamente a tensão na lâmpada. Um diagrama de fluxo do sistema está mostrado na Fig. E2.7.
[(s)
-H(s)
(a)
Filtro
Tubo opaco
(b)
Fiq. E2.7 Controlador de lâmpAda
lC.::.) = G.-~. c.~ R{~) .!. + <::4.,~ c. a. H
I
. ,~
ado).
'= 112.
onstante · lada por ão cai, a Q1 con-e potênnte [25]. impada. g. E2.7.
l
Modelos Matemáticos de Sistemas 77
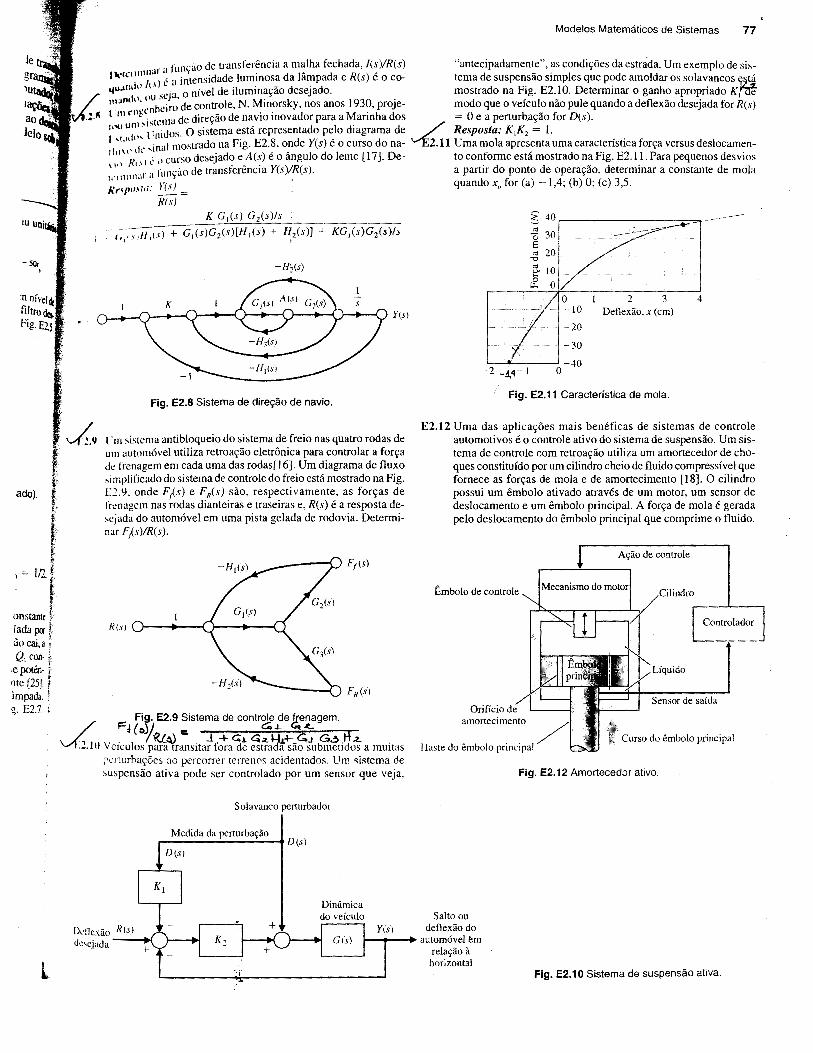
... t'unl,·ão de transferência a malha fechada, /(s)/R(s) "antecipadamente", as condições daestnida. Um exemplo de sis-tJ<·Ictml;1·11) ·:a intensidade luminosa da lâmpada e R(s) é o co- tema de suspensão simples que pode amoldar os solavancos ç~tá o~o .. n•l<' I-' ~j·t 0 nível de iluminação desejado. mostrado na Fig. E2.10. Determinar o ganho apropriado K{<i~ tn~""~'·.~,'1~h~~r~· de controle, N. Minorsky, nos anos 1930, proje- modo que o veículo não pule quando a de flexão desejada for R(s) l 111 c ):: . ·t ·ma de direção de navio inovador para a Marinha dos = O e a perturbação for D(s). 1•"-11111l'
1'( • d l d' d ~ R KK l li lidos. o sistema esta representa o pe o 1agrama e esposta: 1 2 = .
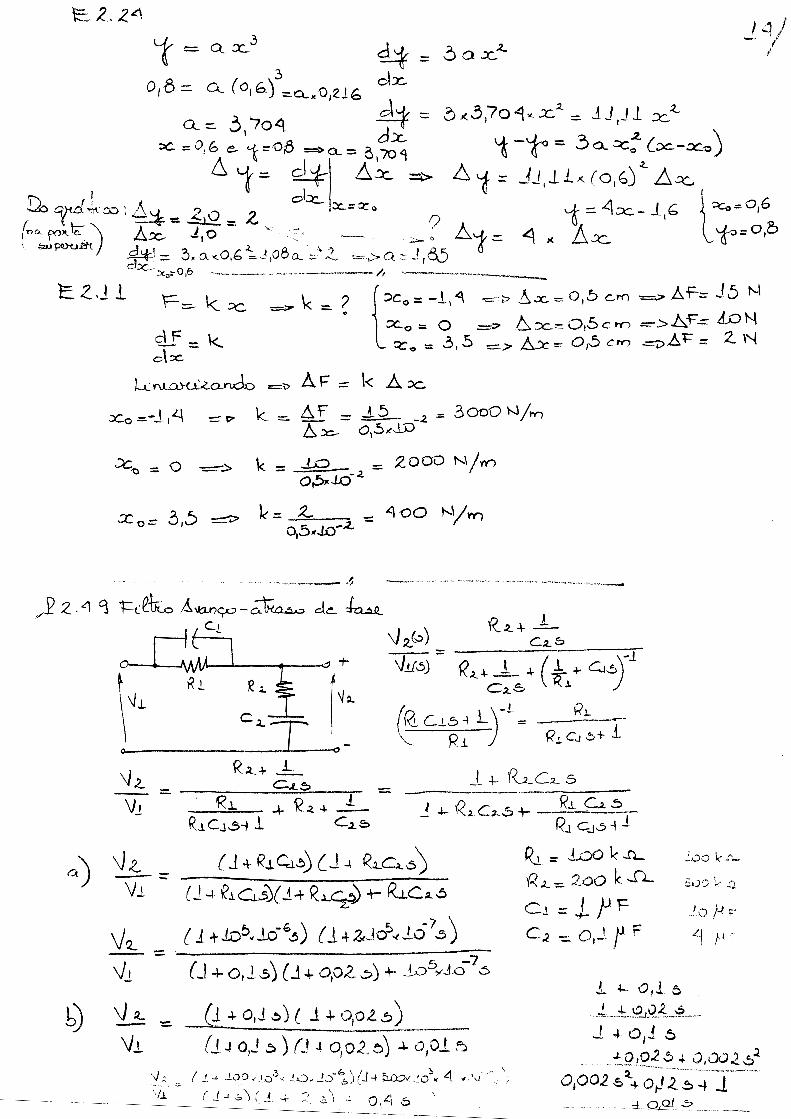
I ' 1 ·"1 '~'. ,i~al mostrado na Fig. E2.8, onde Y(s) é o curso do na- 2.11 Uma mola apresenta uma característica força versus deslocamen-:1,:',''~: ~~.:"curso desejado e~A(:) é oângulo do leme [17]. De- to con_forme está mostrado n~ Fig. E2.l.l. Para pequenos desvios
· ... 1
lun•·ão de transferencm Y(s)/R(s). a partir do ponto de operaçao, determmar a constante de mola t\'!Illlll.llt 'J'
Y!s) · quando X0
for (a) -1,4; (b) O; (c) 3,5. #{(\flll.\(il:
R(s}
Y!s)
Fig. E2.8 Sistema de direção de navio.
L'm sistema anti bloqueio do sistema de freio nas quatro rodas de um automóvel utiliza retroação eletrônica para controlar a força de: frenagem em cada uma das rodas[l6]. Um diagrama de fluxo simplificado do sistema de controle do freio está mostrado na Fig. E2.9. onde F/s) e Fis) são, respectivamente, as forças de frenagem nas rodas dianteiras e traseiras e, R(s) é a resposta desejada do automóvel em uma pista gelada de rodovia. Determinar F1(s)/R(s).
Fig. E2.9 Sistema de controle de frenagem.
L. FJ(e.'JI c::;,.t- G.~ ' . I RL =- . _L+ c;.L G."t.l-h:~---G.J. G~ H .2.. .
-.1 O v C!culos para~rans1tar fora de estrada sao submetidos a munas ;•..:nurbações ao pcrco!Ter terrenos acidentados. Um sistema de suspensão ativa pode ser controlado por um sensor que veja.
Solavanco perturbador
~ 40 .-----
-6 30 -~--'-~ ~20 /
i3.to / & o/
o 2 3 4 -10 Deflexão,x(cm)
-20
-30
-'-:2--...,.c~ <1-_-1----'0- 40
Fig. E2.11 Característica de mola.
E2.12 Uma das aplicações mais benéficas de sistemas de controle automotivos é o controle ativo do sistema de suspensão. Um sistema de controle com retroação utiliza um amortecedor de choques constituído por um cilindro cheio de fluido compressível que fornece as forças de mola e de amortecimento [18]. O cilindro possui um êmbolo ativado através de um motor, um sensor de deslocamento e um êmbolo principal. A força de mola é gerada pelo deslocamento do êmbolo principal que comprime o fluido.
Ação de controle
Êmbolo de controle
Líquido
Sensor de saída Orifício de
Haste do êmbolo principal Curso do êmbolo principal
Fig. E2.12 Amortecedor ativo.
Detlexão R (s)
dc,cjada
Salto ou deflexão do
1-----. automóvel!:m Y(s)
relação à horizontal
Fig. E2.10 Sistema de suspensão ativa.
78 Sistemas de Controle Modernos
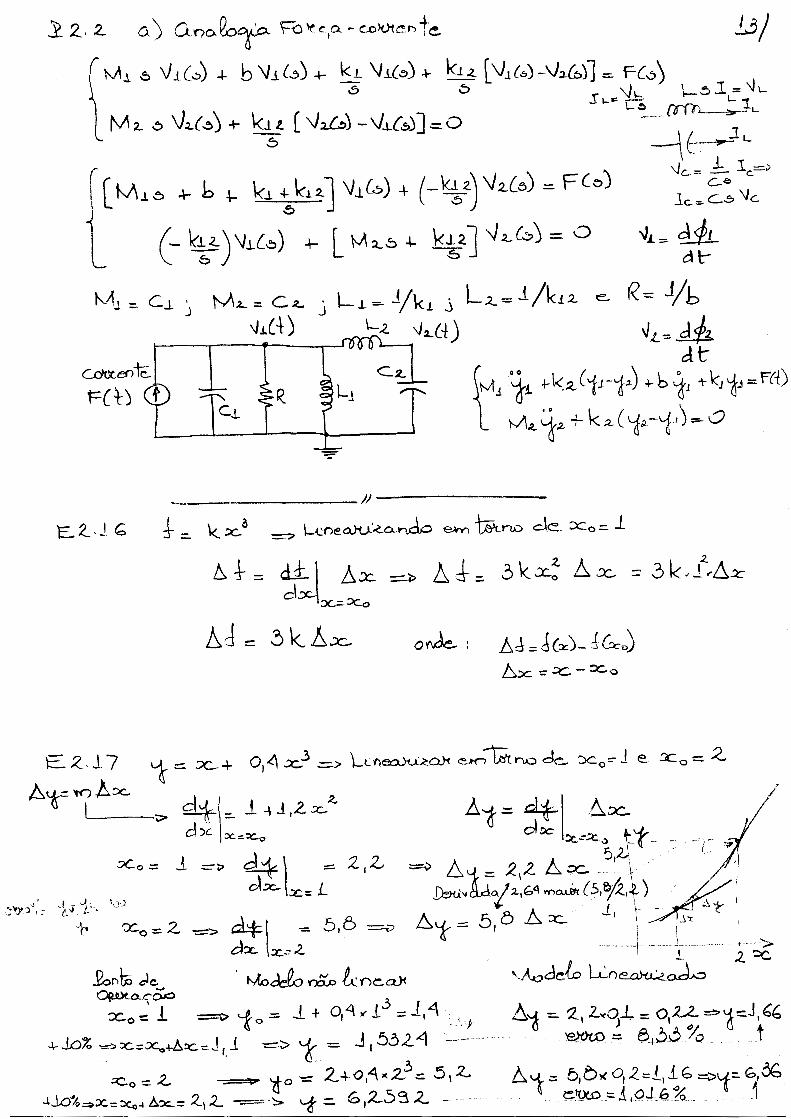
Durante o deslocamento do êmbolo principal, o desequilíbrio de f = kx3, pressão entre_as faces d~ êmbolo J?rincip~l é usado pa:a contro- onde x é 0 deslocamento da mola. Determinar um modelo lin lar o amortecimento. O embolo ativo vana o volume mtemo do ara a m 1 d _ 1 ear cilindro. Este sistema com retroação é mostrado na Fig. E2.12. / p
0 a quan ° x" - · 6} = 6 k /:::. ~
Desenvolver um modelo linear para este dispositivo usando V'E2.17 A saída, y, e a entrada, x, de um dispositivo são relacionados P< modelagem em diagrama de blocos. = x + 0 4 3
/' E2.13 Determinar a função de transferência Y ' x · \...../ (a) Obter os valores da saída para a operação em estado estaci<
Yl ( s) nário em dois pontos de operação X0
= 1 e X0 = 2. (b) Obter R2(s) um modelo linearizado para ambos os pontos de operação
para! o sistema multivariável na Fig. E2.13. compará-los. . ~'E2.18 A função de transferência de um sistema é
v(t) +
Fig. E2.14 Circuito elétrico.
Y(s) IO(s + 2) :
v
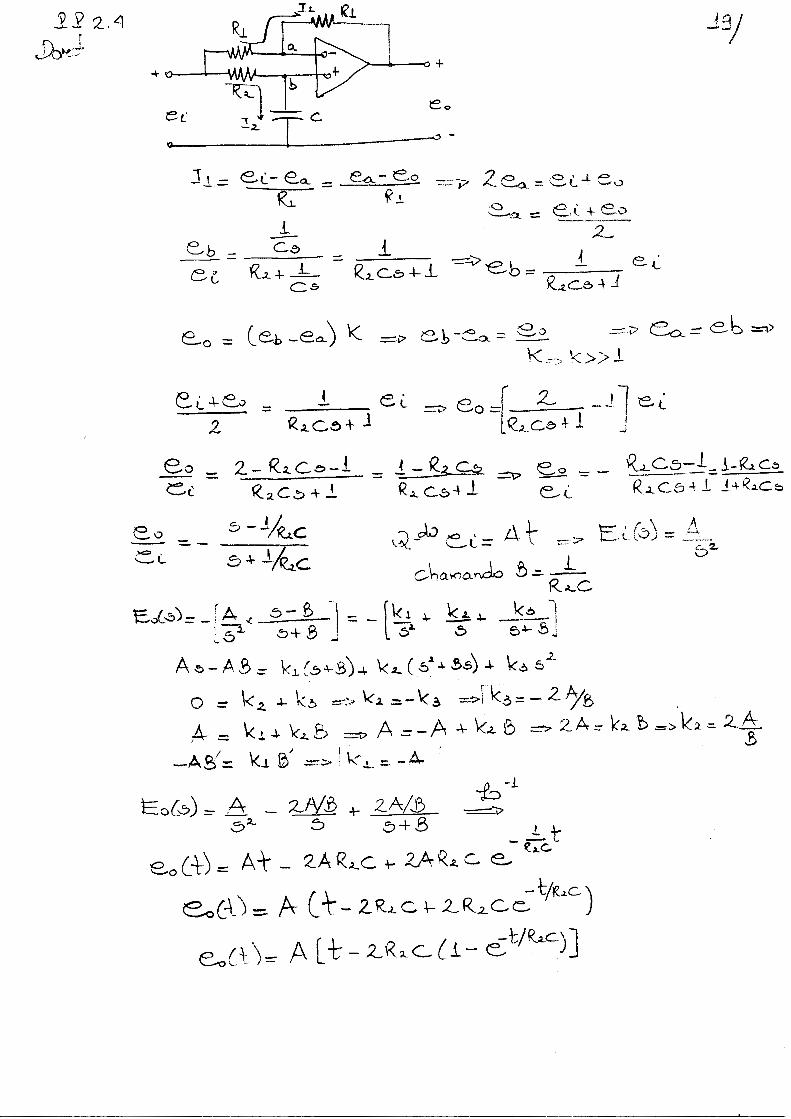
FiQ_. E2.19 Circuito com amplificadores operacionais.
/ \lo(tJ)\}(b) =- 2...(e+J.)/C~+~) ..._..../E2.20 O sisÍema de posicionamento de alta precisão de uma peça
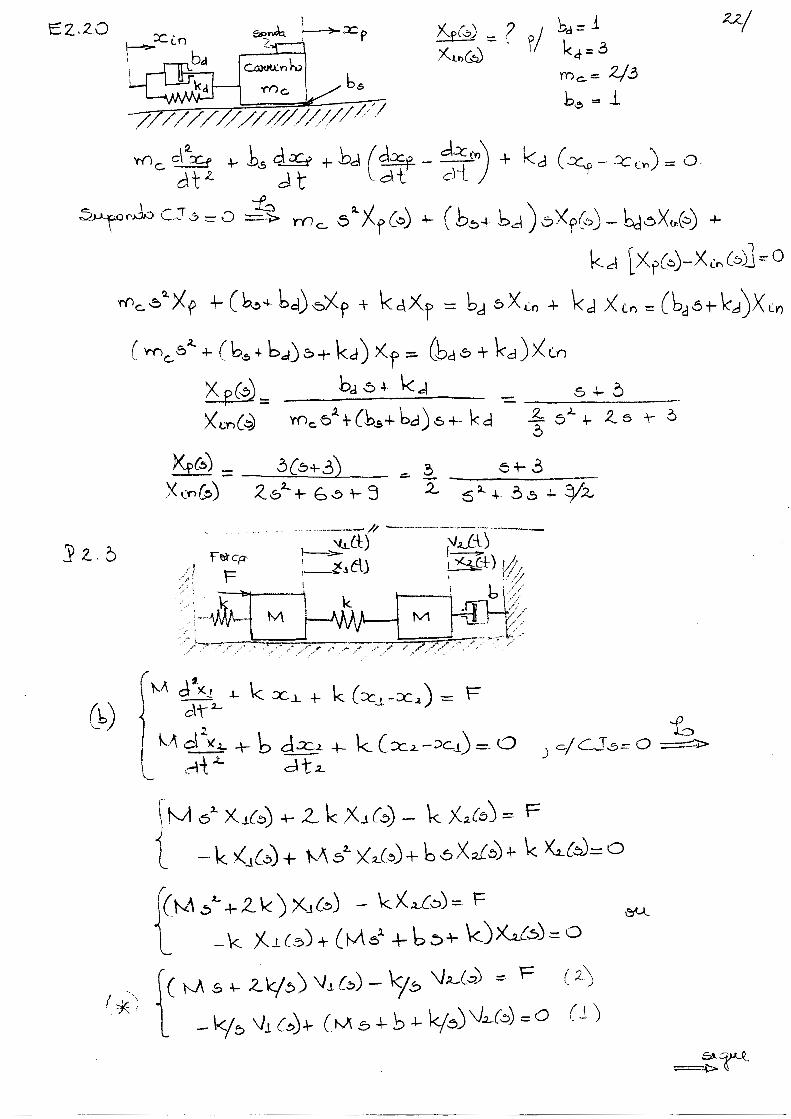
deslizante está mostrado na Fig. E2.20._ Determinar a função de transferência X/s) I Xin(s) quando o coeficiente de atrito viscoso da haste acionadora é b d = 1, a constante de mola da haste acionadora é kd = 3, me = 213 e o atrito de deslizamento é bs = I.
I to--+- xin I I
E2.15 O sistema de controle de posição de uma plataforma espacial é governado pelas seguintes equações:
I I I bd I I I
Sonda'\..
V1 = r - p
d(J dt = 0,6v2
v2 = 7v1 •
As variáveis envolvidas são as seguintes:
r(t) posição desejada da plataforma p(t) posição real da plataforma v1(t) tensão de entrada no amplificador vit) tensão de saída do amplificador O(t) posição angular do eixo do motor
Esboçar um diagrama de fluxo de sinal do sistema, identificando as partes componentes e suas transmitâncias. Em seguida, determinar a função de transferência do sistema P(s)/R(s).
Carrinho me
Atrito viscoso de escorregamento, b,
/
'Á Fig. E2.20 Peça deslizante de precisão.
_/ f(:;)}'/..v,(> \ :: ~A(_ <::J-+.3)) l.e/· + 3 .s + 9/.2...) ~2.21 A velocidade de rotação w de um satélite mostrado na Fig. E2.21
é ajustada mudando-se o comprimento L da barra. A função de transferência entre w(s) e a variação incrementai do comprimen· to da barra !:J.L(s) é
w(s)
!:J.L(s)
2,5(s + 2)
(s + 5)(s + 1)2 •
A variação de comprimento da harra é !:J.L(s) = 11(4s). Detenni· · nar a resposta de velocidade w(_{)
E2.16 U!l1a m0l" us»d~ .-.m um sistema amort"'cednr de c'loques para l<u,oaó\O..'uJ"'-1 .3 -~-\:- 25_--+-- ·~ -~ -t ,- . <::v - - J.. - e. ~ IQ -· ---'""'- e
4 .!..26 - .!.26 ~ 32.. au-\o....;~ell• c.~~.x..,.J.~~ 1/'"()o.. ~"i'>J.. l IU.p>üê~{ado.
no. ~uQo._c-~ \ F' I
loline.
adosllOr
esta cio.
~, ~·
ntrada. r . t !to com r. •r que o I
l ie trans. i 5 JLF. f
l i
a peça çãode · iscoso i ~ acio- 1
=I. t
32.21 ãode men-
ermi·
Modelos Matemáticos de Sistemas 79
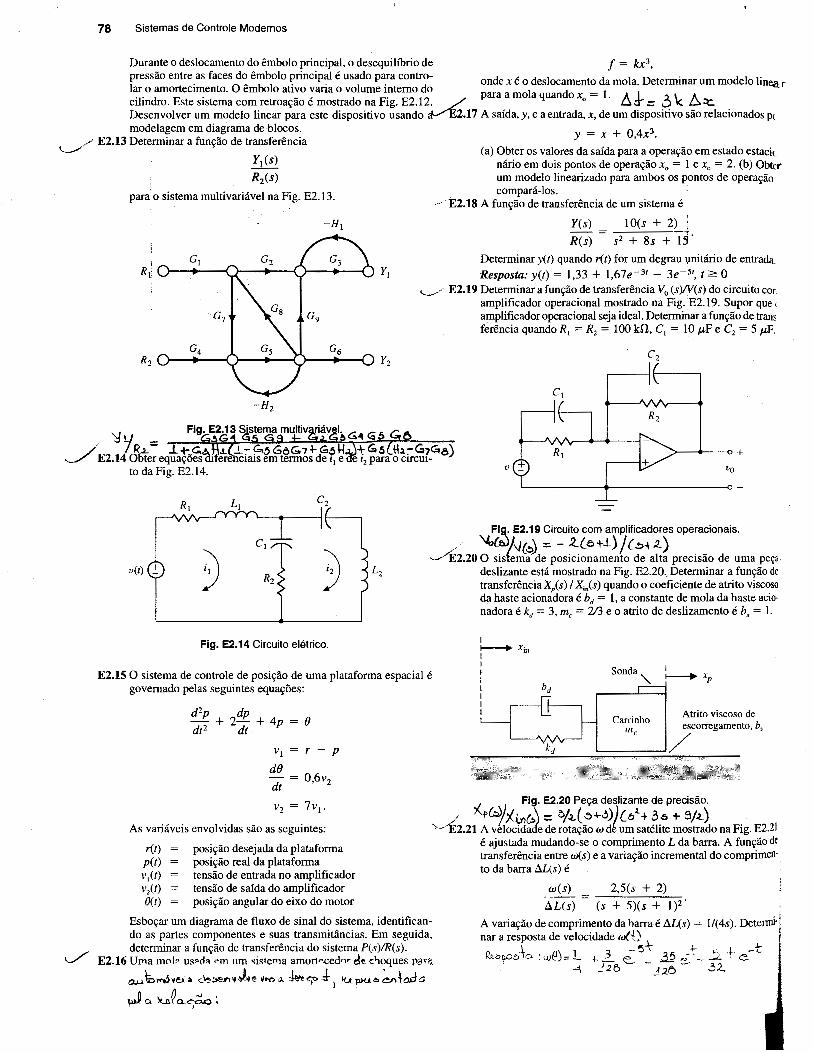
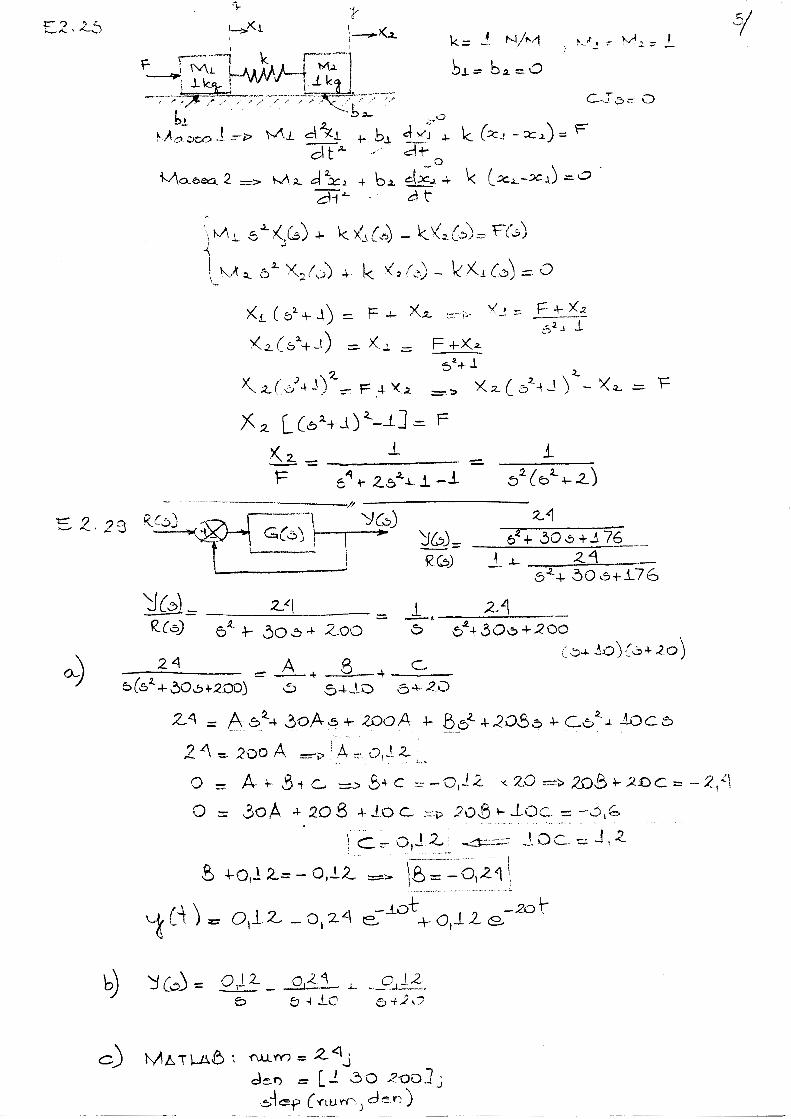
~:25 Determinar a função de transferência Xis)!F(s) para o sistema mostrado na Fig. E2.25. Ambas as massas deslizam sobre uma superfície, sem atrito e k = 1 N/M.
c7'"'
Fig. E2.21 Satélite. Fig. E2.25
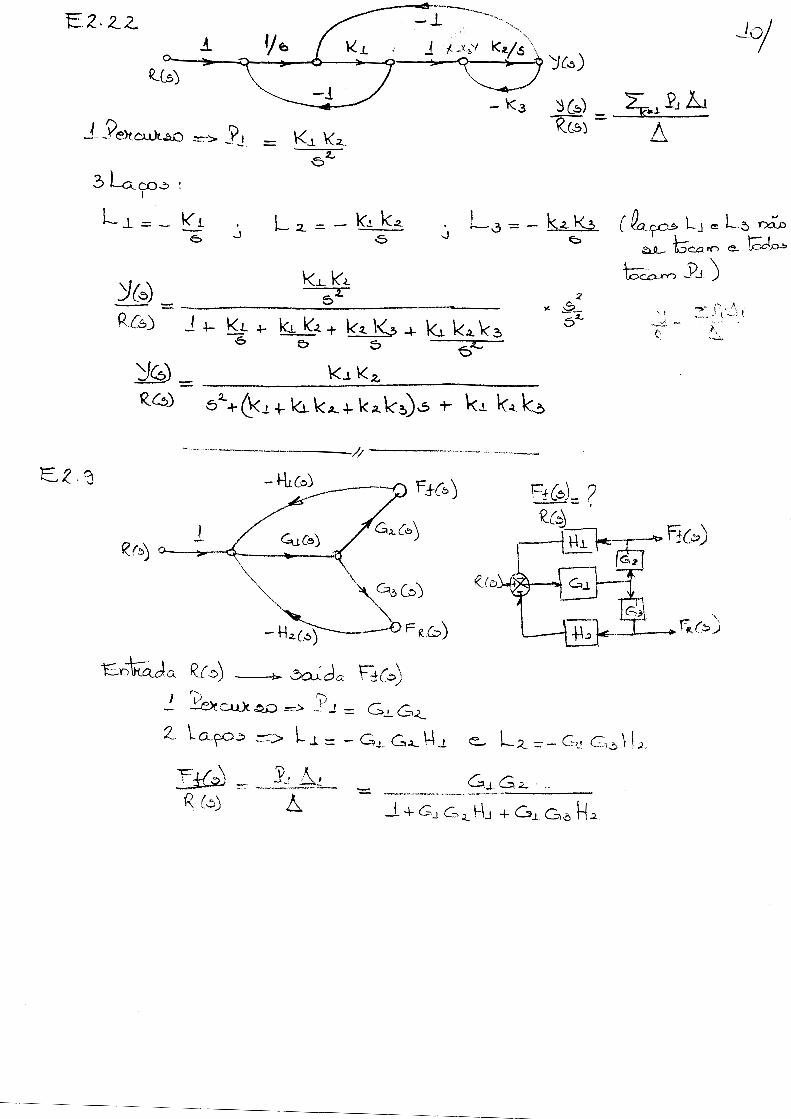
~2 Determinar a funçã~ de trlnsfe~ência a malha fechada T(s) = x2(s) 1
( Y(s))I(R(s)) para o SIStema da Ftg. E2.22. /Resposta: F(s) = s 2(s 2 + 2)
~.26 Determinar a função de transferência Y(s)/D(s) para o sistema mostrado na Fig. E2.26
k(s) Y(s) D(s)
-I R(s) Y(s)
Fig. E2.22 L . \( • ~ ~ - .
~:::.. ~/lHiu + !&~+ b:ç;;)~ + kJ: b 10 ~3 grama de blocos de um sistema está mostrado na Fig. E2.23. Determinar a função de transferência T(s) = Y(s)IR(s).
R(s) Y(s)
/ Fig.E2.23
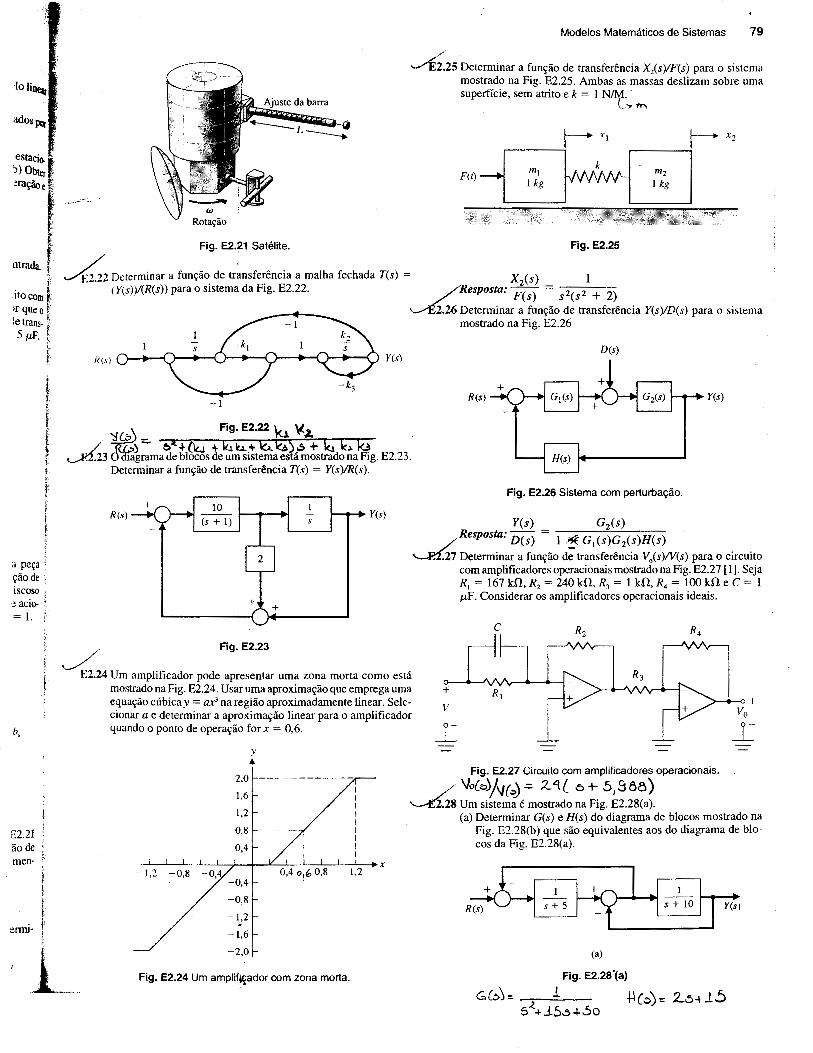
E2.24 Um amplificador pode apresentar uma zona morta como está mostrado na Fig. E2.24. Usar uma aproximação que emprega uma equação cúbica y = ax3 na região aproximadamente linear. Selecionar a e determinar a aproximação linear para o amplificador quando o ponto de operação for x = 0,6.
y
Fig. E2.26 Sistema com perturbação.
Y(s) G 2(s) Resposta: D(s) = 1 .~ G
1(s)G
2(s)H(s)
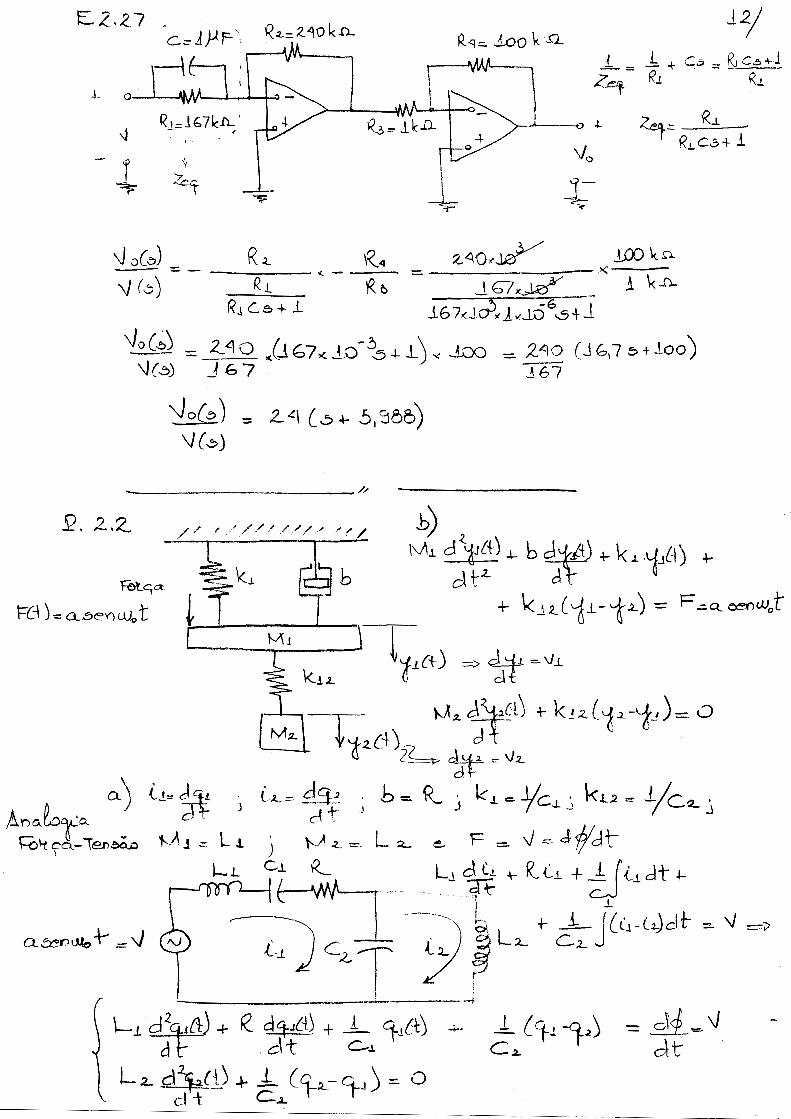
~Determinar a função d;- transferência V.(s)IV(s) para o circuito com amplificadores operacionais mostrado na Fig. E2.27 [ 1]. Seja R1 = 167 k!l, R2 = 240 k!l, R3 = 1 k!l, R4 = 100 k!l e C= l f.LF. Considerar os amplificadores operacionais ideais.
+
Fig. E2.27 Circuito com amplificadores operacionais.
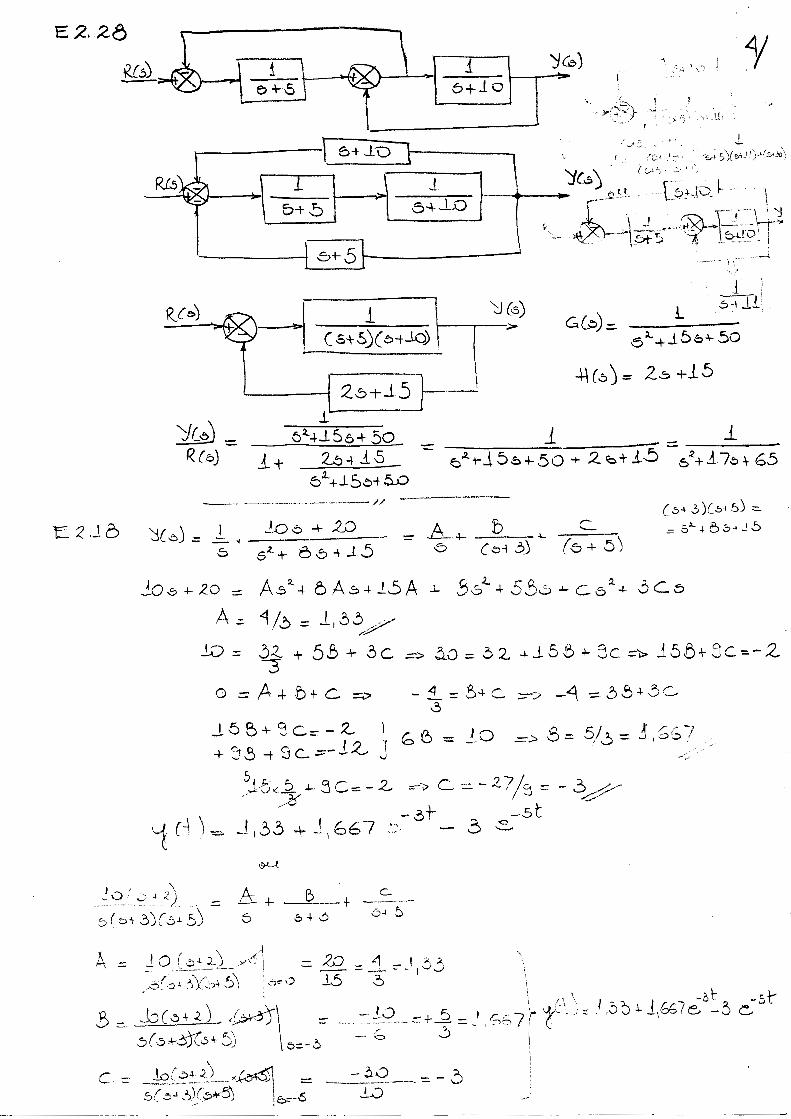
/ \/oLe)/u:0 = '2.. 4. (_ o+ 5,9 88) ~.28 Um sistema é mostrado na Fig. E2.28(a).
-1,2 -0,8
-0,8
-!,2
-1,6
-2.0
Fig. E2.24 Um amplif~ador com zona morta.
(a) Determinar G(s) e H(s) do diagrama de blocos mostrado na Fig. E2.28(b) que são equivalentes aos do diagrama de blocos da Fig. E2.28(a).
Y(s)
(a)
Fig. E2.28'(a)
GG) =- <- .i t\Co):: 2...5~ l5 s -+J.S~+5o
80 Sistemas de Controle Modernos
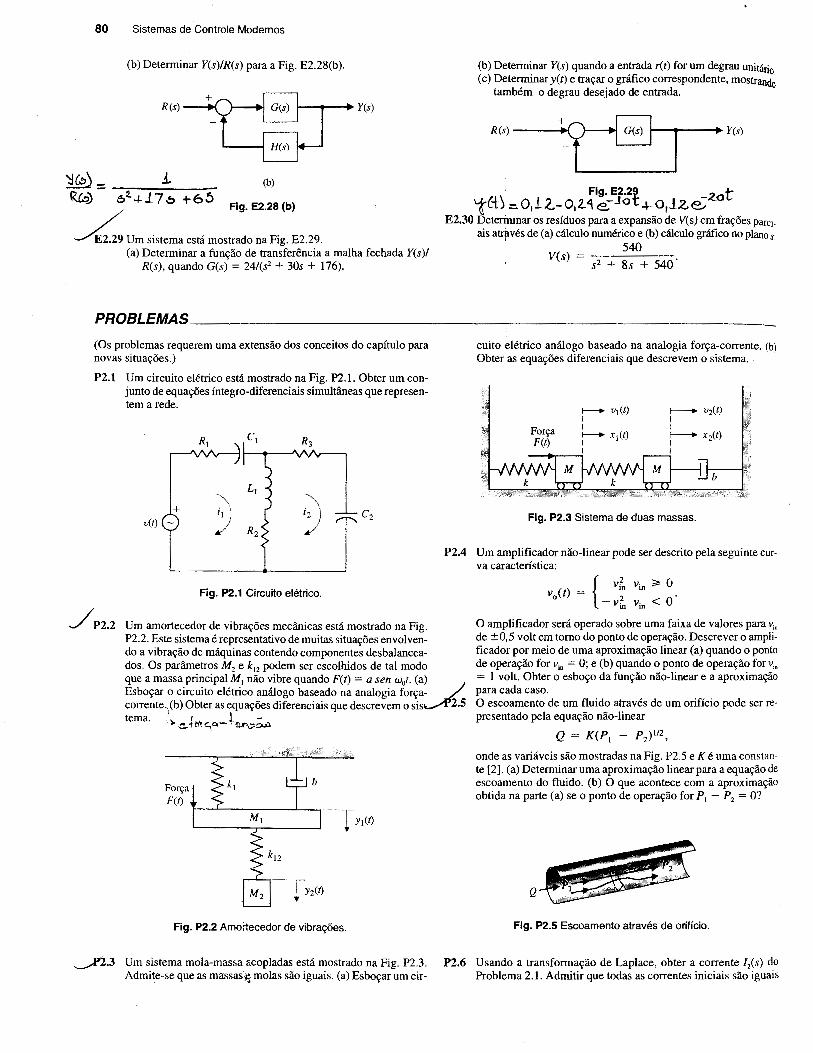
(b) Determinar Y(s)/R(s) para a Fig. E2.28(b). (b) Determinar Y(s) quando a entrada r(t) for um degrau unitário (c) Determinar y(t) e traçar o gráfico correspondente, mostrando
também o degrau desejado de entrada.
(b) ~c.,) = --:---:--..!. __ ~ 62.+176 +65
/ Fig. E2.28 (b)
~9 Um sistema está mostrado na Fig. E2.29. (a) Determinar a função de transferência a malha fechada Y(s)l
R(s), quando G(s) = 24/(s2 + 30s + 176).
R(s) ---.....~~1--t----+110 Y(s)
· Fig. E2.2~ z t 'f-C-t) :.0,12..-0,2.'1 e-301:+-o,Jze 0
E2.30 Determinar os resíduos para a expansão de V(s) em frações parei. ais atr~vés de (a) cálculo numérico e (b) cálculo gráfico no planos
. V(s) = 540 s2 + 8s + 540'
PROBLEMAS ______________________________________________________ __
(Os problemas requerem uma extensão dos conceitos do capítulo para novas situações.)
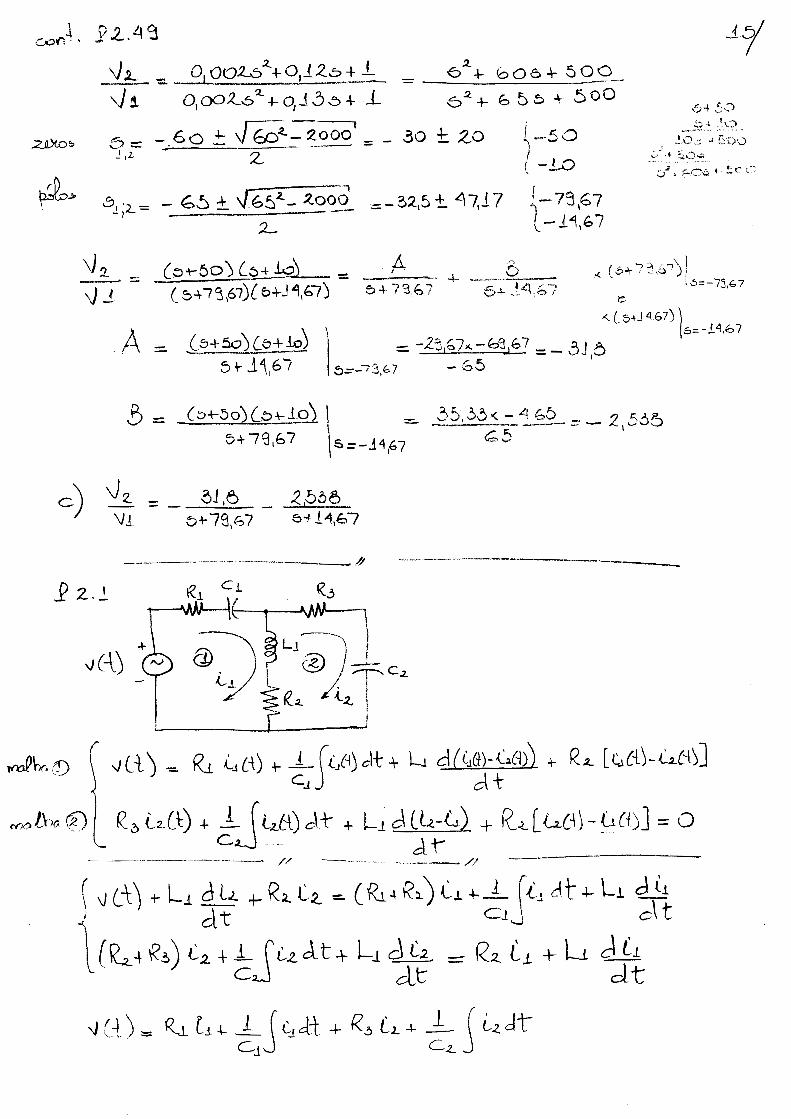
P2.1 Um circuito elétrico está mostrado na Fig. P2.1. Obter um conjunto de equações íntegro-diferenciais simultâneas que representem a rede.
v(t)
Fig. P2.1 Circuito elétrico.
Um amortecedor de vibrações mecânicas está mostrado na Fig. P2.2. Este sistema é representativo de muitas situações envolven-do a vibração de máquinas contendo componentes desbalancea-dos. Os parâmetros M2 e k12 podem ser escolhidos de tal modo
cuito elétrico análogo baseado na analogia força-corrente. (b) Obter as equações diferenciais que descrevem o sistema.
,____ v1(t) I I r-- x1(t)
I
r------+ vi t) I I ;-----"' x 2(t)
I
Fig. P2.3 Sistema de duas massas.
P2.4 Um amplificador não-linear pode ser descrito pela seguinte curva característica:
que a massa principal M1 não vibre quando F(t) = a sen w0t. (a) Esboçar o circuito elétrico análogo baseado na analogia força~ / COITente •. (b) Obter as equações diferenciais que descrevem o sis~2.5
O amplificador será operado sobre uma faixa de valores para v;, de ±0,5 volt em tomo do ponto de operação. Descrever o amplificador por meio de uma aproximação linear (a) quando o ponto de operação for v," = O; e (b) quando o ponto de operação for v;, = 1 volt. Obter o esboço da função não-linear e a aproximação para cada caso. O escoamento de um fluido através de um orifício pode ser representado pela equação não-linear tema. · r l -> e.:tO'lc,<>-' s.t>~
Fig. P2.2 Amortecedor de vibrações.
~.3 Um sistema mola-mas~a é~Copladas está mostrado na Fig. P2.3. Admite-se que as massas-~t molas são iguais. (a) Esboçar um cir-
Q = K(P1 - P2) 112 ,
onde as variáveis são mostradas na Fig. P2.5 e K é uma constante [2]. (a) Determinar uma aproximação linear para a equação de escoamento do fluido. (b) O que acontece com a aproximação obtida na parte (a) se o ponto de operação for P 1 - P 2 = O?
Q
Fig. P2.5 Escoamento através de orifício.
P2.6 Usando a transformação de Laplace, obter a corrente Iis) do Problema 2.1. Admitir que todas as correntes iniciais são iguais
(b)
·ur-
t via
Jlinto
r e-
lfi·
de :ão
do ais
, a tensão inicial nos terminais do capacitar C 1 é zero, a 1c:ro. que · · · · · d · C ' 10
, .• 0 e a tensão tmcml nos termmats o capacttor 2 e 11tltlt.:f
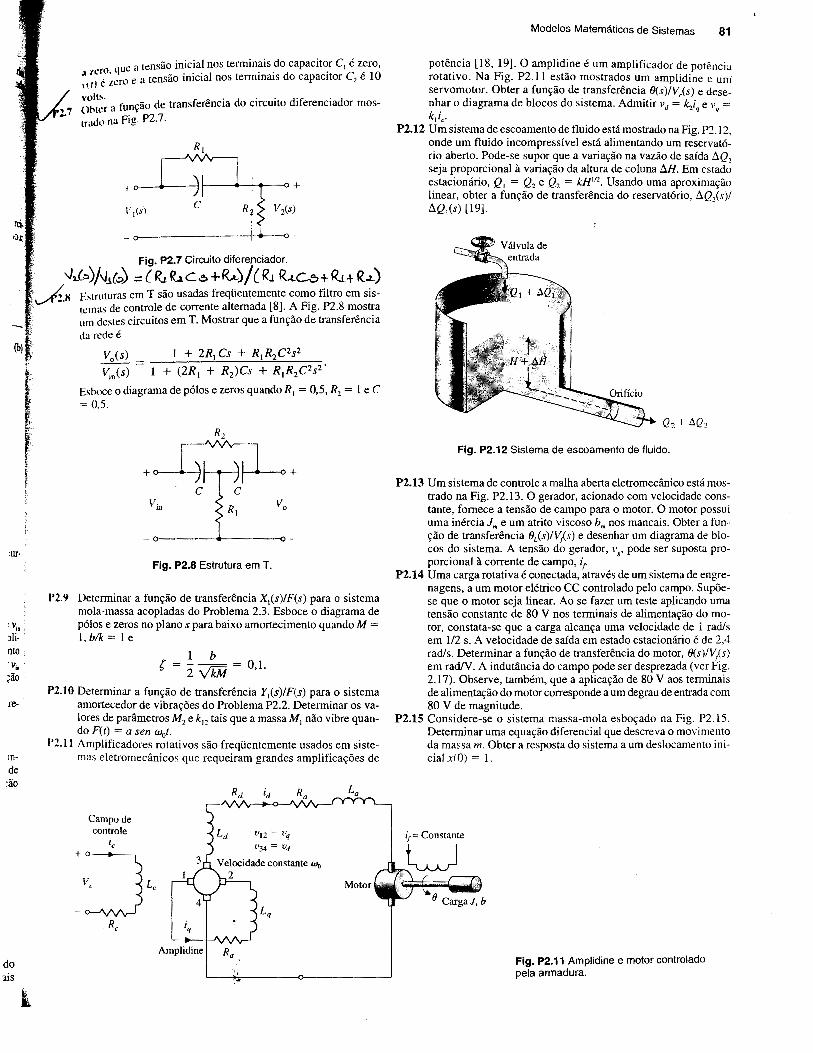
n~t~. funça·o de transferência do circuito diferenciador mos(),.tc:r a nado na Fig. P2. 7.
Fig. P2.7 Circuito diferenciador.
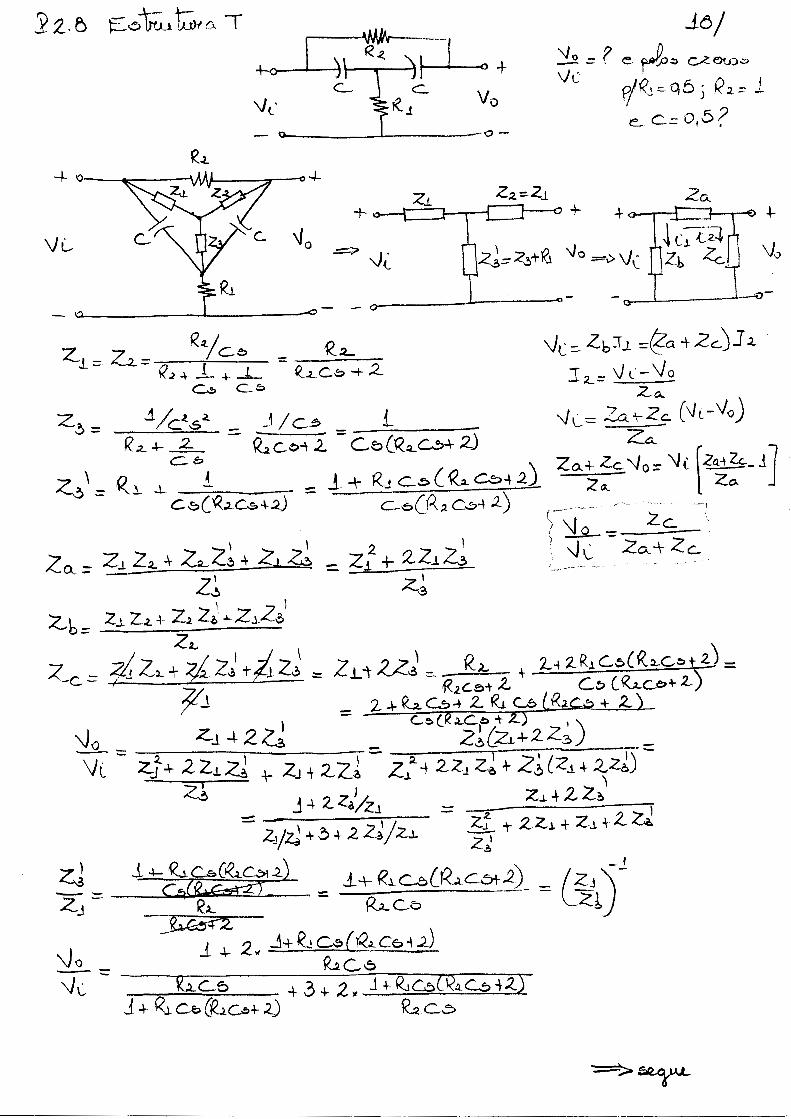
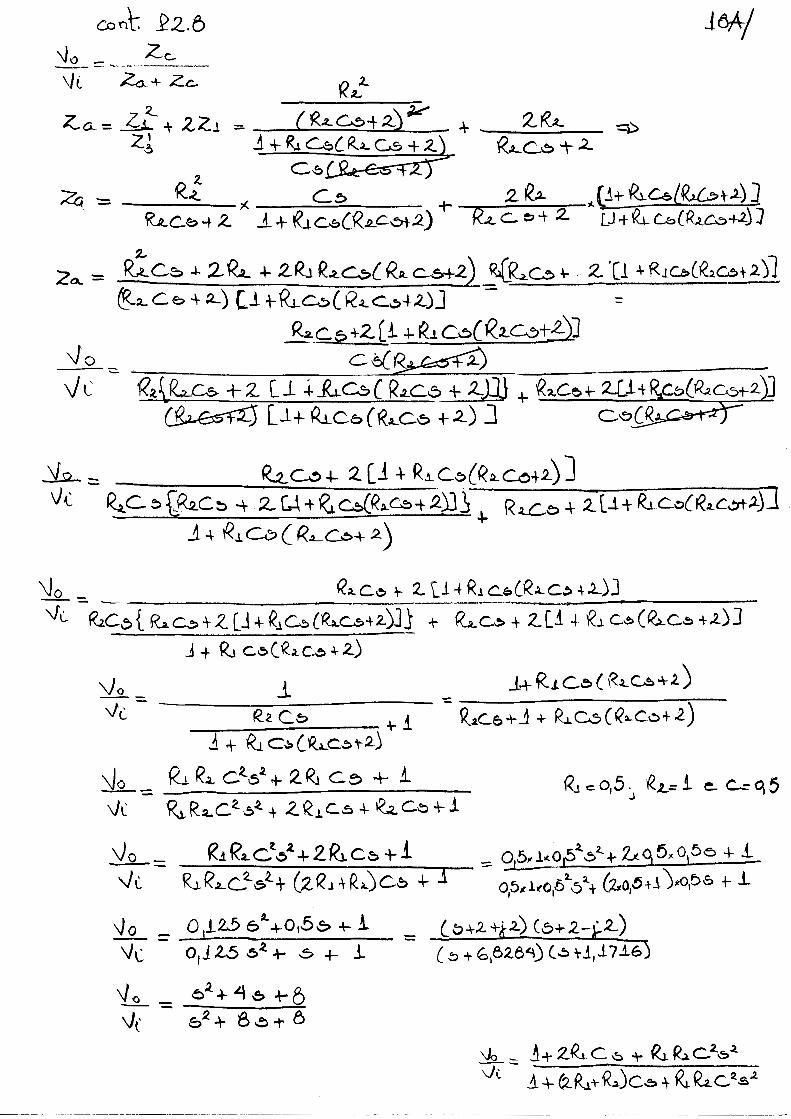
..Jb)j\l.l(~) ::::{.R.,. ((,.C6 +R-t-)j ( R.t R4Cô+RH R.z-) Estruturas em T são usadas freqüentemente como filtro em sistemas de controle de corrente alternada [8]. A Fig. P2.8 mostra um destes circuitos em T. Mostrar que a função de transferência da rede é
Esboce o diagrama de pólos e zeros quando R1 = 0,5, R2 = 1 e C == 0,5.
Fig. P2.8 Estrutura em T.
1>2.9 Determinar a função de transferência X1(s)/F(s) para o sistema mola-massa acopladas do Problema 2.3. Esboce o diagrama de pólos e zeros no plano s para baixo amortecimento quando M = I, b!k = 1 e
1 b ç = 2 v7JJ = 0,1.
1'2.10 Determinar a função de transferência f 1(s)/F(s) para o sistema amortecedor de vibrações do Problema P2.2. Determinar os valores de parâmetros M 2 e k12 tais que a massa M 1 não vibre quando F(t) = a sen w0t.
1'2.11 Amplificadores rotativos são freqüentemente usados em sistemas eletromecânicos que requeiram grandes amplificações de
Campo de controle
i c
Amplidine
·.,
Modelos Matemáticos de Sistemas 81
potência [ 18, 19]. O amplidine é um amplificador de potência rotativo. Na Fig. P2.11 estão mostrados um amplidine e um servomotor. Obter a função de transferência O(s)/Vc(s) e desen~ar o diagrama de blocos do sistema. Admitir vd = k2iq e vq = kll,..
P2.12 Um sistema de escoamento de fluido está mostrado na Fig. P2.12, onde um fluido incompressível está alimentando um reservatório aberto. Pode-se supor que a variação na vazão de saída tl.Q, seja proporcional à variação da altura de coluna tl.H. Em estado estacionário, Q1 = Q2 e Q2 = kH1n.. Usando uma aproximação linear, obter a função de transferência do reservatório, tl.Qis)/ tl.Q1(s) [19].
Fig. P2.12 Sistema de escoamento de fluido.
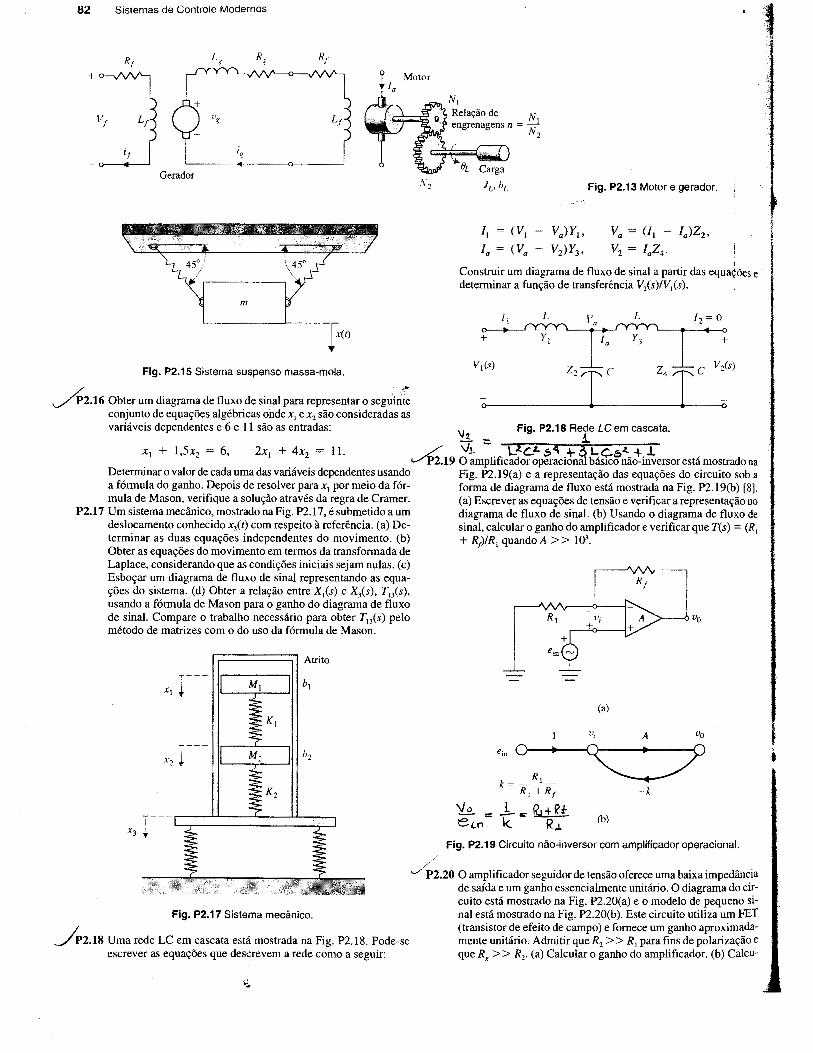
P2.13 Um sistema de controle a malha aberta eletromecânico está mostrado na Fig. P2.13. O gerador, acionado com velocidade constante, fornece a tensão de campo para o motor. O motor possui uma inércia Jm e um atrito viscoso bm nos mancais. Obter a função de transferência OL(s)/Vf..s) e desenhar um diagrama de blocos do sistema. A tensão do gerador, vg, pode ser suposta proporcional à corrente de campo, i1.
P2.14 Uma carga rotativa é conectada, através de um sistema de engrenagens, a um motor elétrico CC controlado pelo campo. Supõese que o motor seja linear. Ao se fazer um teste aplicando uma tensão constante de 80 V nos terminais de alimentação do motor, constata-se que a carga alcança uma velocidade de 1 rad/s em 112 s. A velocidade de saída em estado estacionário é de 2.4 rad/s. Determinar a função de transferência do motor, O(s)IV,(s) em rad/V. A indutância do campo pode ser desprezada (ver Fig. 2.17). Observe, também, que a aplicação de 80 V aos terminais de alimentação do motor corresponde a um degrau de entrada com 80 V de magnitude.
P2.15 Considere-se o sistema massa-mola esboçado na Fig. P2.15. Determinar uma equação diferencial que descreva o movimento da massa m. Obter a resposta do sistema a um deslocamento inicial x(Q) = l.
Fig. P2.11 Amplidine e motor controlado pela armadura.
82 Sistemas de Controle Modernos
Motor
Gerador
m
Fig. P2.15 Sistema suspenso massa-mola.
N! Relaçãode N engrenagens n = N~
Fig. P2.13 Motor e gerador.
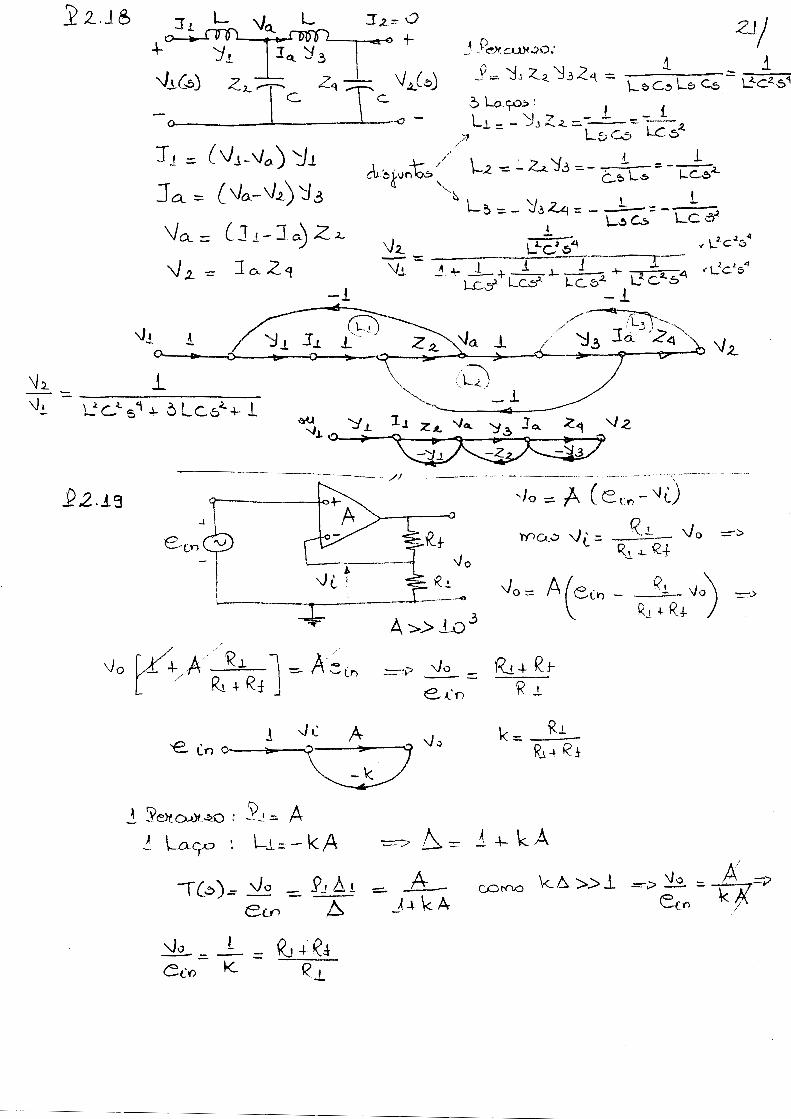
Va) Y1' V a = U1 - la)Zz'
V2 )Y3 , V2 = laZ4 .
I
Construir um diagrama de fluxo de sinal a partir das equaÇões e determinar a função de transferência Vis)IV1(s).
+
L
y I
I' a L
+
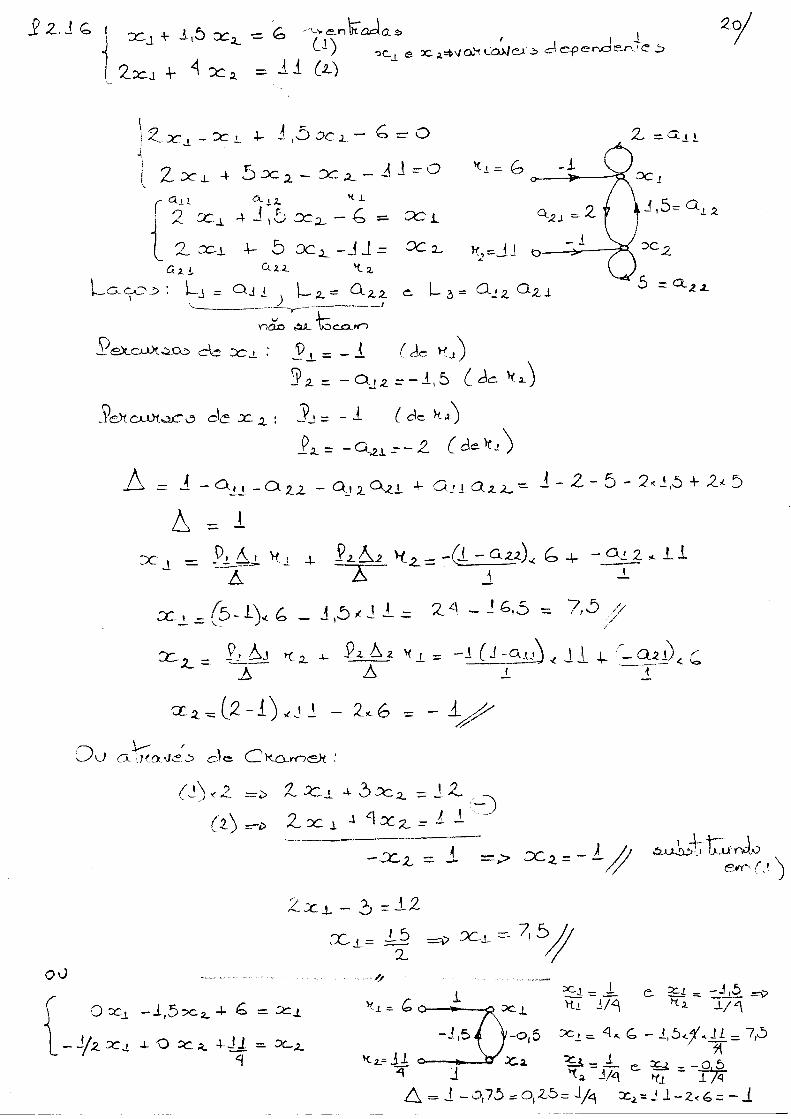
/P2.16 Obter um diagrama de fluxo de sinal para representar o segui~~: conjunto de equações algébricas onde x 1 e x2 são consideradas as variáveis dependentes e 6 e ll são as entradas: \1 Fig. P2.18 Rede LCem cascata.
~::. 1 / \)j_ Llc..L ~4 -\- ~ Lç.6l- + l.
............-P2.19 O amplificador operacion bás1co não-mversor está mostrado na Determinar o valor de cada uma das variáveis dependentes usando Fig. P2.19(a) e a representação das equações do circuito sob a a fórmula do ganho. Depois de resolver parax1 por meio da fór- forma de diagrama de fluxo está mostrada na Fig. P2.19(b) [8]. mula de Mason, verifique a solução através da regra de Cramer. (a) Escrever as equações de tensão e verificar a representação no
P2.17 Um sistema mecânico, mostrado naFig. P2.17, é submetido a um diagrama de fluxo de sinal. (b) Usando o diagrama de fluxo de deslocamento conhecido xit) com respeito à referência. (a) De- sinal, calcular o ganho do amplificador e verificar que T(s) = (R
1
terminar as duas equações independentes do movimento. (b) + R1)tR
1 quando A>> 103•
Obter as equações do movimento em termos da transformada de Laplace, considerando que as condições iniciais sejam nulas. (c) Esboçar um diagrama de fluxo de sinal representando as equações do sistema. (d) Obter a relação entre X 1(s) e Xis), T 13(s), usando a fórmula de Mason para o ganho do diagrama de fluxo de sinal. Compare o trabalho necessário para obter T13(s) pelo método de matrizes com o do uso da fórmula de Mason.
Atrito T---
T ' b! í ...
1
---- $ I I b2 ...
~K, .S. S.
J
Fig. P2.17 Sistema mecânico.
Á2.18 Uma rede LC em cascata está mostrada na Fig. P2.18. Pode-se escrever as equações que descrevem a rede como a seguir:
(a)
-k
(b)
Fig. P2.19 Circuito não-inversor com amplificador operacional.
/,' . J P2.20 O amplificador seguidor de tensão oferece uma baixa impedânc1a
de saída e um ganho essencialmente unitário. O diagrama do circuito está mostrado na Fig. P2.20(a) e o modelo de pequeno sinal está mostrado na Fig. P2.20(b). Este circuito utiliza um FET (transistor de efeito de campo) e fornece um ganho aproximadamente unitário. Admitir que R2 > > R1 para fins de polarização e que R,>> R2• (a) Calcular o ganho do amplificador. (b) Calcu-
'or.
o o --<>
+
estrado• uito sob a .l9(b){8). ·ntaçãono '!fluxo de f(s) = (R
1
na I.
·edância ido cirIeno siamFET :imadazaçãoe Calcu-
eU Q. Go
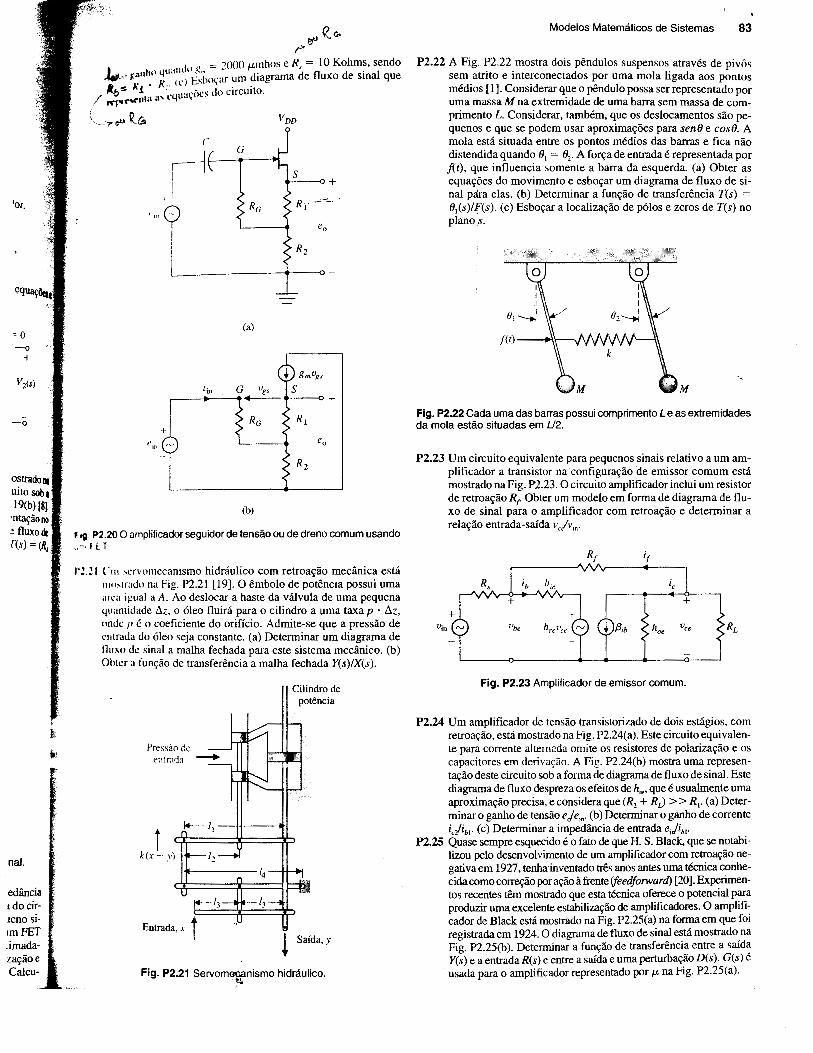
r-I , == 2000 1-Lmhos e R, = lO Kohms, sendo
D . h<' quan'" 8,., d fl d · 1 ~-· ~"11 , ·) Esbo•·ar um diagrama e uxo e sma que
..... lo'!~ /(. (l . ' . . "''- ·<~U'IÇÔCS do CifCUltO.
/ ,..~,..'("'('!lia"' l-, •
\' .. -,..oU ~C,. VDD
r . I .,.o I
(a)
(b)
f og. P2.20 O amplificador seguidor de tensão ou de dreno comum usando ""'f l T
1'1.11 l·m >crvomecanismo hidráulico com retroação mecânica está ntt"!rado na Fig. P2.2l [19]. O êmbolo de potência possui uma .arca igual a A. Ao deslocar a haste da válvula de uma pequena quamidade Llz, o óleo fluirá para o cilindro a uma taxa p · Llz, onde I' é o coeficiente do orifício. Admite-se que a pressão de t'rHrada do óleo seja constante. (a) Determinar um diagrama de fluxo de sinal a malha fechada para este sistema mecânico. (b) Obter a função de transferência a malha fechada f(s)/X(s).
i k(x- y)
Cilindro de potência
Entrada,x i ~ Saída,y
Fig. P2.21 Servomecanismo hidráulico. •.~o
Modelos Matemáticos de Sistemas 83
P2.22 A Fig. P2.22 mostra dois pêndulos suspensos através de pivôs sem atrito e interconectados por uma mola ligada aos pontos médios [1]. Considerar que o pêndulo possa ser representado por uma massa M na extremidade de uma barra sem massa de comprimento L. Considerar, também, que os deslocamentos são pequenos e que se podem usar aproximações para senO e cosO. A mola está situada entre os pontos médios das barras e fica não distendida quando 01 = 02• A força de entrada é representada por f(t), que influencia somente a barra da esquerda. (a) Obter as equações do movimento e esboçar um diagrama de fluxo de sinal para elas. (b) Determinar a função de transferência T(s) = O,(s)IF(s). (c) Esboçar a localização de pólos e zeros de T(s) no planos.
M
Fig. P2.22 Cada uma das barras possui comprimento L e as extremidades da mola estão situadas em U2.
P2.23 Um circuito equivalente para pequenos sinais relativo a um amplificador a transistor na configuração de emissor comum está mostrado na Fig. P2.23. O circuito amplificador inclui um resistor de retroação Rr Obter um modelo em forma de diagrama de fluxo de sinal para o amplificador com retroação e determinar a relação entrada-saída vjvin·
+
Fig. P2.23 Amplificador de emissor comum.
P2.24 Um amplificador de tensão transistorizado de dois estágios, com retroação, está mostrado na Fig. P2.24(a). Este circuito equivalente para corrente alternada omite os resistores de polarização e os capacitares em derivação. A Fig. P2.24(b) mostra uma representação deste circuito sob a forma de diagrama de fluxo de sinal. Este diagrama de fluxo despreza os efeitos de hre, que é usualmente uma aproximação precisa, e considera que (R2 + RJ >>R,. (a) Determinar o ganho de tensão ejein· (b) Determinar o ganho de corrente ic/ib1. (c) Determinar a impedância de entrada ei./iw
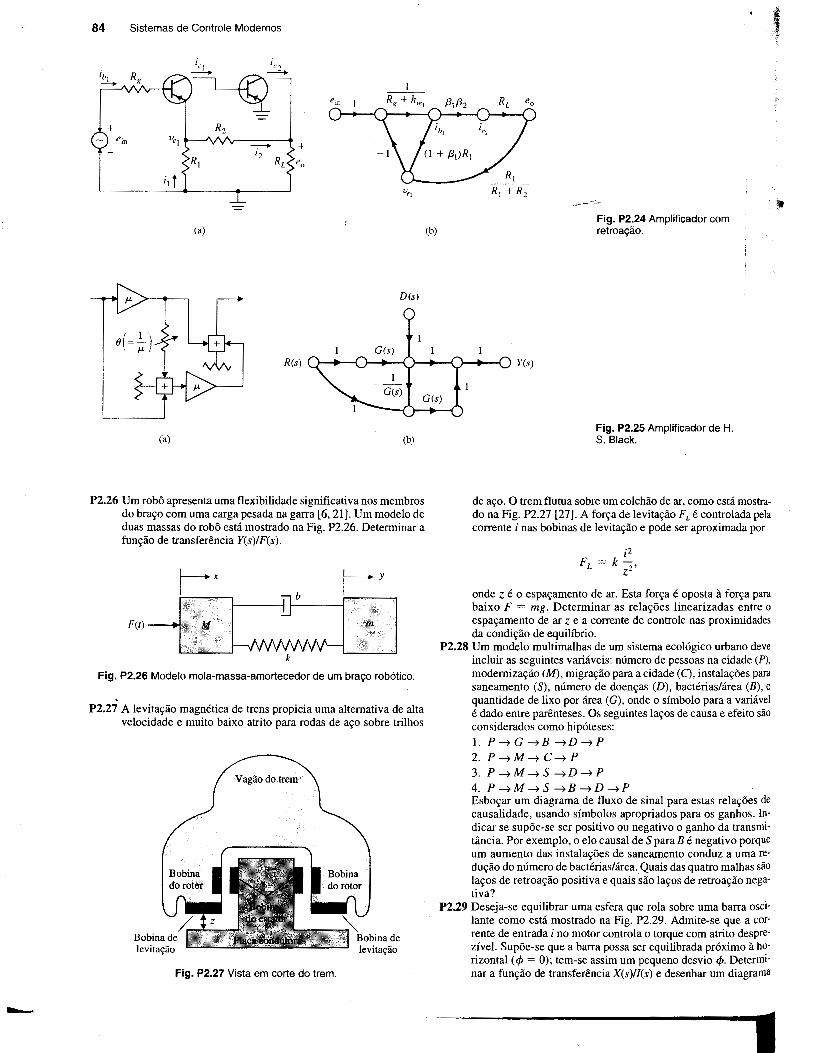
P2.25 Quase sempre esquecido é o fato de que H. S. Black, que se notabilizou pelo desenvolvimento de um amplificador com retroação negativa em 1927, tenha inventado três anos antes uma técnica conhecida como correção por ação à frente (jeed/orward) [20]. Experimentos recentes têm mostrado que esta técnica oferece o potencial para produzir uma excelente estabilização de amplificadores. O amplifi~ cador de Black está mostrado na Fig. P2.25(a) na forma em que fm registrada em 1924. O diagrama de fluxo de sinal está mostrado na Fig. P2.25(b ). Determinar a função de transferência entre a saída f(s) e a entrada R(s) e entre a saída e uma perturbação D(s). G(s) é usada para o amplificador representado por 1-L na Fig. P2.25(a).
84 Sistemas de Controle Modernos
+
(a)
D(s)
G(s)
R(s)
(a) (bl
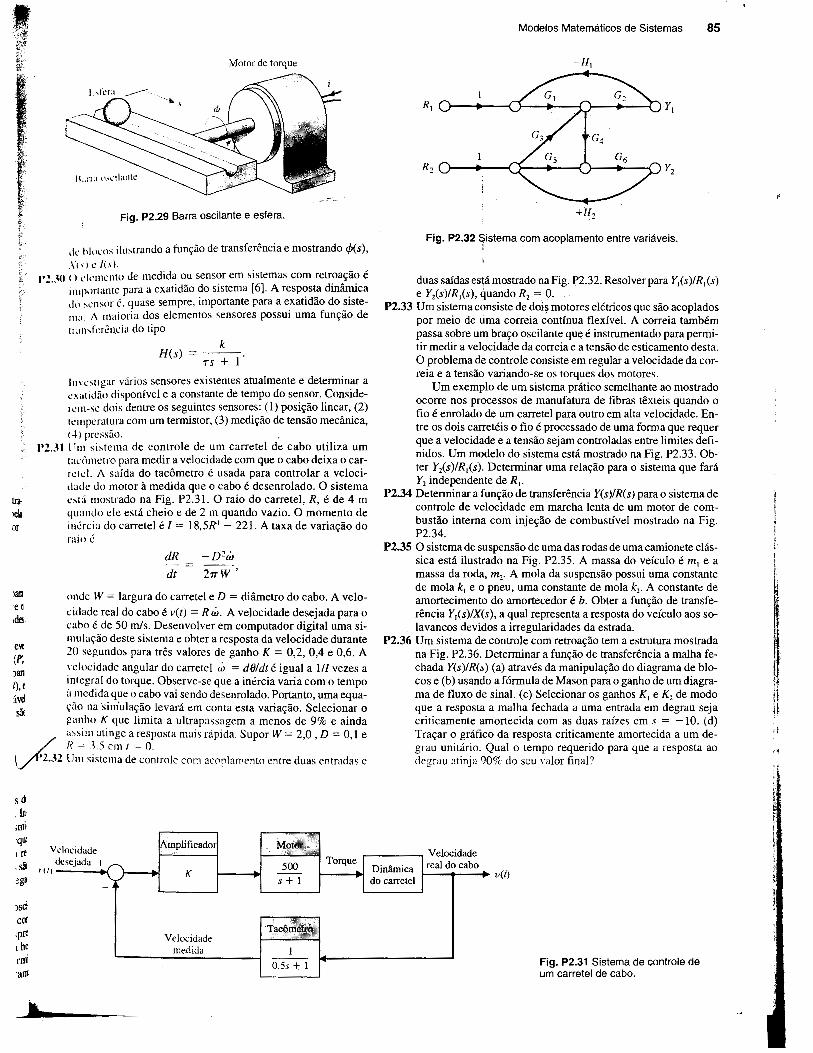
P2.26 Um robô apresenta uma flexibilidade significativa nos membros do braço com uma carga pesada na garra [6, 21]. Um modelo de duas massas do robô está mostrado na Fig. P2.26. Determinar a função de transferência Y(s)/F(s).
b
F(t)
Fig. P2.26 Modelo mola-massa-amortecedor de um braço robótico.
. P2.27 A levitação magnética de trens propicia uma alternativa de alta
velocidade e muito baixo atrito para rodas de aço sobre trilhos
Fig. P2.27 Vista em corte do trem.
(b)
Y(s)
Fig. P2.24 Amplificador com retroação.
Fig. P2.25 Amplificador de H. S. Black.
de aço. O trem flutua sobre um colchão de ar, como está mostrado na Fig. P2.27 [27]. A força de levitação FL é controlada pela corrente i nas bobinas de levitação e pode ser aproximada por
onde z é o espaçamento de ar. Esta força é oposta à força para baixo F = mg. Determinar as relações linearizadas entre o espaçamento de ar z e a corrente de controle nas proximidades da condição de equilíbrio.
P2.28 Um modelo multimalhas de um sistema ecológico urbano deve incluir as seguintes variáveis: número de pessoas na cidade (P), modernização (M), migração para a cidade (C), instalações para saneamento (S), número de doenças (D), bactérias/área (B), e quantidade de lixo por área (G), onde o símbolo para a variável é dado entre parênteses. Os seguintes laços de causa e efeito são considerados como hipóteses: l.P~G~B~D~P
2. P~M~ C~ P 3. P~M~S ~D~P 4. P~M~S ~B~D~P Esboçar um diagrama de fluxo de sinal para estas relações de causalidade, usando símbolos apropriados para os ganhos. In· dicar se supõe-se ser positivo ou negativo o ganho da transmitância. Por exemplo, o elo causal de S para B é negativo porque um aumento das instalações de saneamento conduz a uma redução do número de bactérias/área. Quais das quatro malhas são laços de retroação positiva e quais são laços de retroação negativa?
P2.29 Deseja-se equilibrar uma esfera que rola sobre uma barra oscilante como está mostrado na Fig. P2.29. Admite-se que a cor· rente de entrada i no motor controla o torque com atrito despre· zível. Supõe-se que a barra possa ser equilibrada próximo à ho· rizontal ( cp = O); tem-se assim um pequeno desvio cp. Determi· nar a função de transferência X(s)/l(s) e desenhar um diagrama
I
Motor de torque
Fig. P2.29 Barra oscilante e esfera.
de blocos ilustrando a função de transferência e mostrando c/J(s), XII) c /(s).
1'1 .. '11 < J clcmcnw de medida ou sensor em sistemas com retr_o~çã? é 1111 portantc para a exatidão ~o sistema [6]. A resp~s~_? dma~ca d" scnsor é. quase sempre, Importante para a exattdao do srstema. A maioria dos elementos sensores possui uma função de transfcrcncia do tipo
k H(s)
TS + 1
lnn:stigar vários sensores existentes atualmente e determinar a cxatidi;.> disponível e a constante de tempo do sensor. Considell'Jll-se dois dentre os seguintes sensores: (1) posição linear, (2) temperatura com um termistor, (3) medição de tensão mecânica, t 4) pressão.
1'2 .. H L.'m sistema de controle de um carretel de cabo utiliza um tacümetro para medir a velocidade com que o cabo deixa o carretel. A saída do tacômetro é usada para controlar a velocidade do motor à medida que o cabo é desenrolado. O sistema
tra- csl<í mostrado na Fig. P2.31. O raio do carretel, R, é de 4 m Jela quando ele está cheio e de 2m quando vazio. O momento de or inércia do carretel é I= IS,SR• - 221. A taxa de variação do
larl
evt (P)
:},l ivd sãe
raio é
dR -D2w dt 27TW'
onde W = largura do carretel e D = diâmetro do cabo. A velo
cidade real do cabo é v(t) =R w. A velocidade desejada para o caho é de 50 m/s. Desenvolver em computador digital uma simulação deste sistema e obter a resposta da velocidade durante 20 segundos para três valores de ganho K = 0,2, 0,4 e 0,6. A
\'Ciocidade angular do carretel w = d(}/dt é igual a li! vezes a integral do torquc. Observe-se que a inércia varia com o tempo à medida que o cabo vai sendo desenrolado. Portanto, uma equação na ·siniulação levará em conta esta variação. Selecionar o ganho K que limita a ultrapassagem a menos de 9% c ainda assim atinge a resposta mais rápida. Supor W = 2,0, D = 0,1 e
/ R = 3.5 em t = O. \_/"'2 .. '2 Um sistema de controle com acoplamento entre duas entradas e
sdt . In· ;mt ·qUI
v !Amplificador Mofkcijc doe idade ~z@íi
Modelos Matemáticos de Sistemas 85
Fig. P2.32 ~istema com acoplamento entre variáveis.
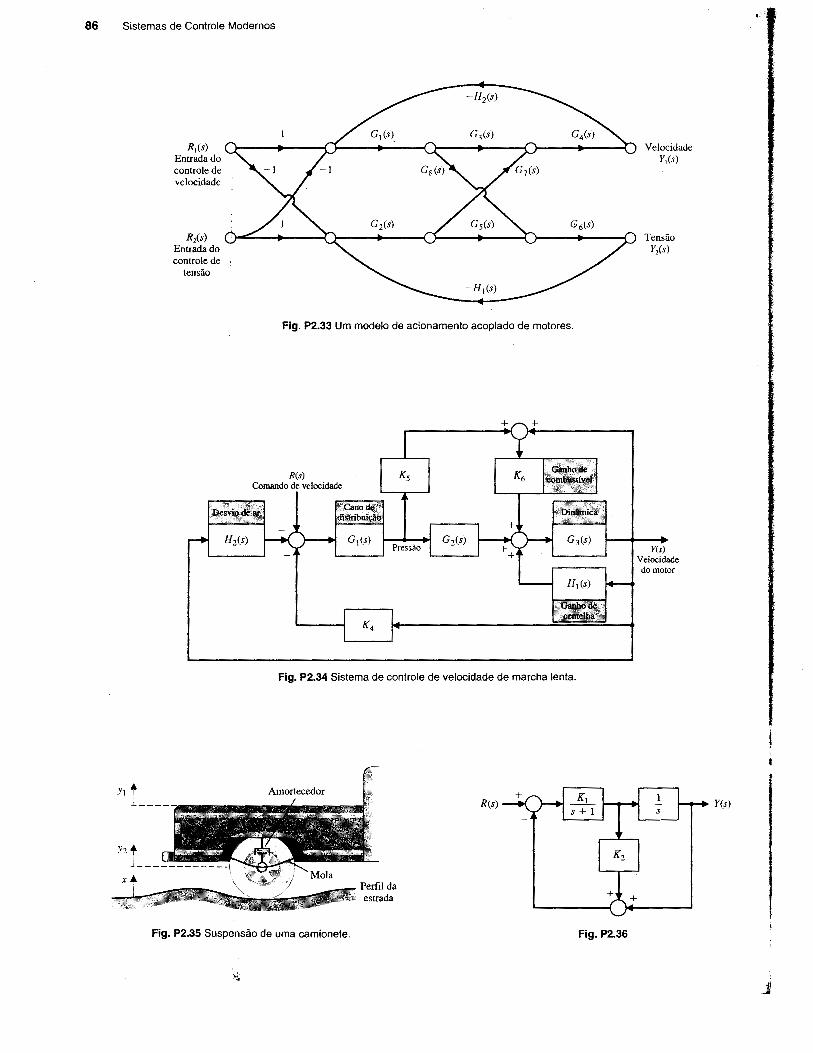
duas saídas está mostrado na Fig. P2.32. Rcsol ver para Y,(s )/R 1 (s) e Y2(s)/R1(s), quando R2 = O.
P2.33 Um sistema consiste de dois motores elétricos que são acoplados por meio de uma correia contínua flexível. A correia também passa sobre um braço oscilante que é instrumentado para permitir medir a velocidade da correia e a tensão de esticamento desta. O problema de controle consiste em regular a velocidade da correia e a tensão variando-se os torques dos motores.
Um exemplo de um sistema prático semelhante ao mostrado ocorre nos processos de manufatura de fibras têxteis quando o fio é enrolado de um carretel para outro em alta velocidade. Entre os dois carretéis o fio é processado de uma forma que requer que a velocidade e a tensão sejam controladas entre limites definidos. Um modelo do sistema está mostrado na Fíg. P2.33. Obter Yz(s)/R1(s). Determinar uma relação para o sistema que fará Y2 independente de R,.
P2.34 Determinar a função de transferência Y(s)!R(s) para o sistema de controle de velocidade em marcha lenta de um motor de combustão interna com injeção de combustível mostrado na Fig. P2.34.
P2.35 O sistema de suspensão de uma das rodas de uma camionete clássica está ilustrado na Fig. P2.35. A massa do veículo é m1 e a massa da roda, tnz. A mola da suspensão possui uma constante de mola k, e o pneu, uma constante de mola k2• A constante de amortecimento do amortecedor é b. Obter a função de transferência Y,(s)/X(s), a qual representa a resposta do veículo aos solavancos devidos a irregularidades da estrada.
P2.36 Um sistema de controle com retroação tem a estrutura mostrada na Fig. P2.36. Determinar a função de transferência a malha fechada Y(s)IR(s) (a) através da manipulação do diagrama de blocos e (b) usando a fórmula de Mason para o ganho de um diagrama de fluxo de sinal. (c) Selecionar os ganhos K, e K2 de modo que a resposta a malha fechada a uma entrada em degrau seja criticamente amortecida com as duas raízes em s = -10. (d) Traçar o gráfico da resposta criticamente amortecida a um degrau unitário. Qual o tempo requerido para que a resposta ao degrau atinja 90o/c do seu valor final?
trt .sãc 1(/j
~gt
desejada +0---+ K
Velocidade 500 Torque .I I ai d b Dinâmica re 0 ca 0
v(t) -
Velocidade medida
'
--s + 1
, 'S'''' ! 22'1'.'2'2
1 ---0.5s + 1
· 1 do carretel 1
Fig. P2.31 Sistema de controle de um carretel de cabo.
I
I 11 ü
86 Sistemas de Controle Modernos
Yz • ! xi.
R1(s) Entrada do controle de velocidade
R,(s) Entrada do controle de
tensão
Fig. P2.33 Um modelo de acionamento acoplado de motores.
R(s) Comando de velocidade
+ + ~----------~ ~----------~
Fig. P2.34 Sistema de controle de velocidade de marcha lenta.
R(s)
Fig. P2.35 Suspensão de uma camionete. Fig. P2.36
Velocidade Y1(s)
Tensão Y,(s)
Y(s) Velocidade do motor
Y(s)
J
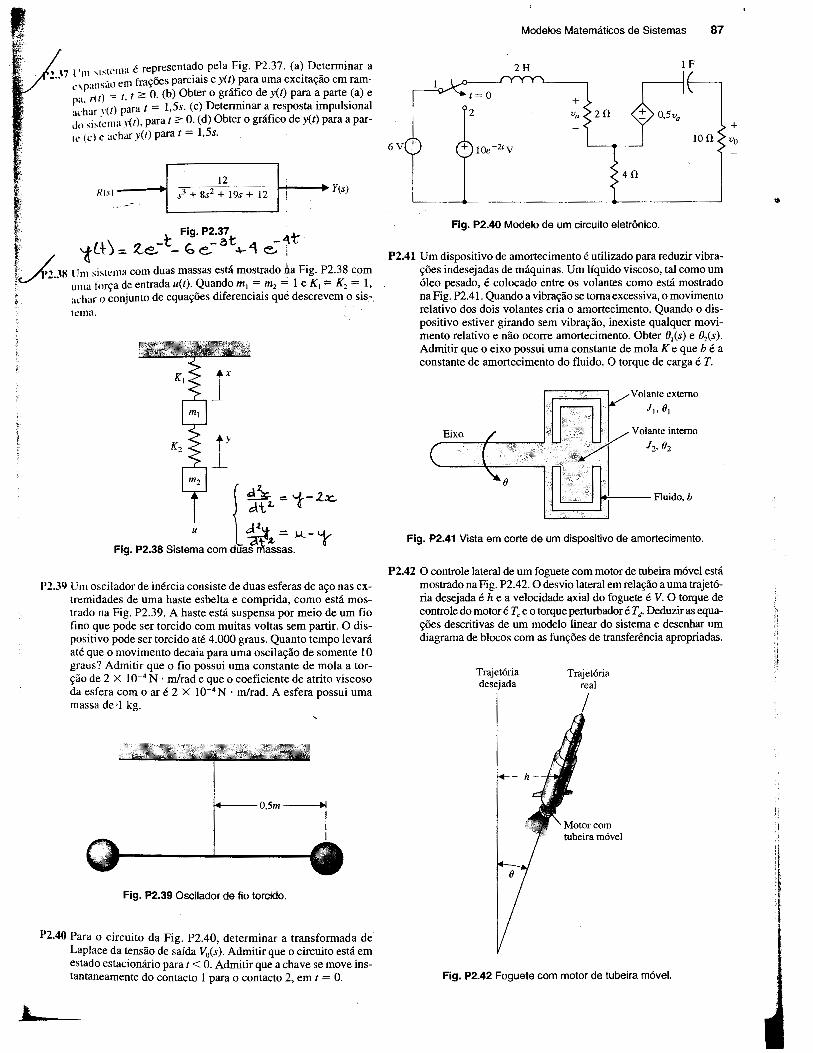
~·-'' l'm '"tema é representa~~ pela Fig. P2.37. (a~ D:terminar a <'' ansão em frações parCiais e y(t} para uma exc1taçao em ram
. p r( I) = t, 1 ::::: O. (b) Obter o grafico de y(t) para a parte (a) e ~~~i1ar ,·(t) para t = 1,5s. (c) Determinar a resposta impulsionai Jn ,;isicma y(t), para t ::::=O. (d) Obter o gráfico de y(t) para a parI<' (c) c achar y(t) para t = 1,5s.
< "
r '''' ~ •ti :;:. :.~:~~ + 12 1-...... --•" Y(s)
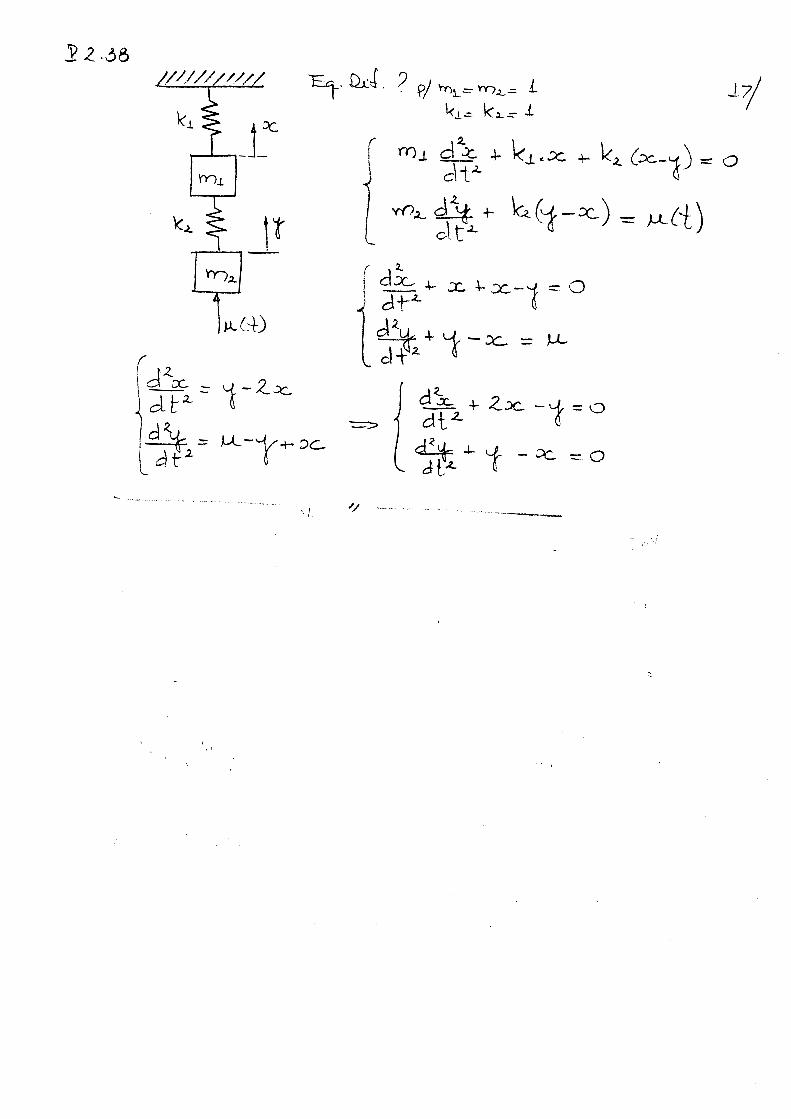
li'< \ - -ãt -41, r 't(b: Z.e -<;e. +-1 e i . '~-'H Um sistema com duas massas está mostrado l!ta F1g. P2.38 com t uma força de entrada u(t). Quando m1 = m2 ;; I e K1 = K2 = 1, · achar o conjunto de equações diferenciais que descrevem o sis-.
tema.
1'2.39 Um oscilador de inércia consiste de duas esferas de aço nas extremidades de uma haste esbelta e comprida, como está mostrado na Fig. P2.39. A haste está suspensa por meio de um fio fino que pode ser torcido com muitas voltas sem partir. O dispositivo pode ser torcido até 4.000 graus. Quanto tempo levará até que o movimento decaia para uma oscilação de somente 1 O graus? Admitir que o fio possui uma constante de mola a torção de 2 X I0-4 N · m/rad e que o coeficiente de atrito viscoso da esfera com o ar é 2 X 10-4 N · m/rad. A esfera possui uma massa de •I kg.
1+----0,5m ---4>1.-1 I I
Fig. P2.39 Oscilador de fio torcido.
P2.40 Para o circuito da Fig. P2.40, determinar a transformada de Laplace da tensão de saída V0(s). Admitir que o circuito está em estado estacionário para t <O. Admitir que a chave se move instantaneamente do contacto I para o contacto 2, em t = O.
Modelos Matemáticos de Sistemas 87
2H 1 F
6V :f:
40
Fig. P2.40 Modelo de um circuito eletrônico.
P2.4l Um dispositivo de amortecimento é utilizado para reduzir vibrações indesejadas de máquinas. Um líquido viscoso, tal como um óleo pesado, é colocado entre os volantes como está mostrado na Fig. P2.41. Quando a vibração se toma excessiva, o movimento relativo dos dois volantes cria o amortecimento. Quando o dispositivo estiver girando sem vibração, inexiste qualquer movimento relativo e não ocorre amortecimento. Obter 81(s) e Bis). Admitir que o eixo possui uma constante de mola K e que b é a constante de amortecimento do fluido. O torque de carga é T.
Fig. P2.41 Vista em corte de um dispositivo de amortecimento.
P2.42 O controle lateral de um foguete com motor de tubeira móvel está mostrado na Fig. P2.42. O desvio lateral em relação a uma trajetória desejada é h e a velocidade axial do foguete é V. O torque de controle do motor é Te e o torque perturbador é Td. Deduzir as equações descritivas de um modelo linear do sistema e desenhar um diagrama de blocos com as funções de transferência apropriadas.
Trajetória desejada
Trajetória real
I
tubeira móvel
Fig. P2.42 Foguete com motor de tu beira móvel.
88 Sistemas de Controle Modernos
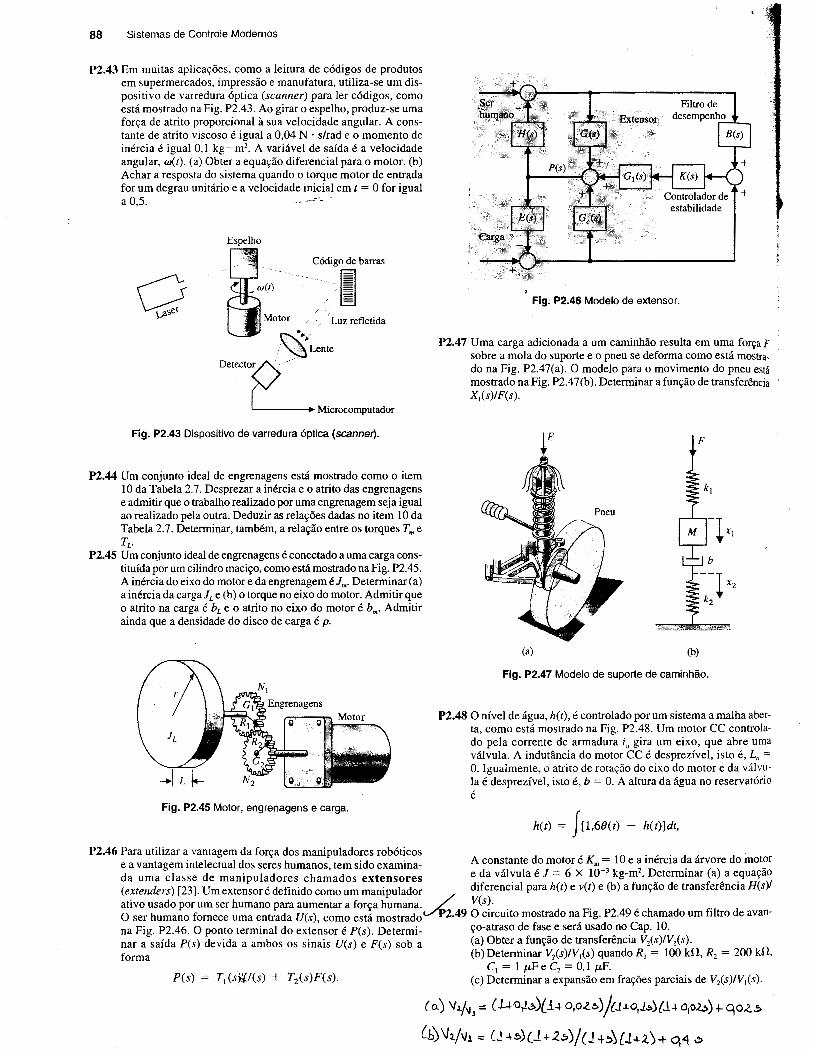
P2.43 Em muitas aplicações, como a leitura de códigos de produtos em supermercados, impressão e manufatura, utiliza-se um dispositivo de varredura óptica (scanner) para ler códigos, como está mostrado na Fig. P2.43. Ao girar o espelho, produz-se uma força de atrito proporcional à sua velocidade angular. A constante de atrito viscoso é igual a 0,04 N · s/rad e o momento de inércia é igual 0,1 kg-m2. A variável de saída é a velocidade angular, w(t). (a) Obter a equação diferencial para o motor. (b) Achar a resposta do sistema quando o torque motor de entrada for um degrau unitário e a velocidade inicial em t = O for igual a 0,5. ---
Espelho
Código de barras
I Motor .-/ ·Luz refletida
-~Lente Detectoú .·
L_ Microcomputador
Fig. P2.43 Dispositivo de varredura óptica (scanner).
P2.44 Um conjunto ideal de engrenagens está mostrado como o item 10 da Tabela 2.7. Desprezar a inércia e o atrito das engrenagens e admitir que o trabalho realizado por uma engrenagem seja igual ao realizado pela outra. Deduzir as relações dadas no item lO da Tabela 2.7. Determinar, também, a relação entre os torques Tm e TL.
P2.45 Um conjunto ideal de engrenagens é conectado a uma carga constituída por um cilindro maciço, como está mostrado na Fig. P2.45. A inércia do eixo do motor e da engrenagem é J m· Determinar (a) a inércia da cargaJL e (b) o torque no eixo do motor. Admitir que o atrito na carga é bL e o atrito no eixo do motor é bm. Admitir ainda que a densidade do disco de carga é p.
Fig. P2.45 Motor, engrenagens e carga.
Fig. P2.46 Modelo de extensor.
P2.47 Uma carga adicionada a um caminhão resulta em uma força F sobre a mola do suporte e o pneu se deforma como está mostrado na Fig. P2.47(a). O modelo para o movimento do pneu está mostrado na Fig. P2.47(b). Determinar a função de transferência X1(s)/F(s).
F F
(a) (b)
Fig. P2.47 Modelo de suporte de caminhão.
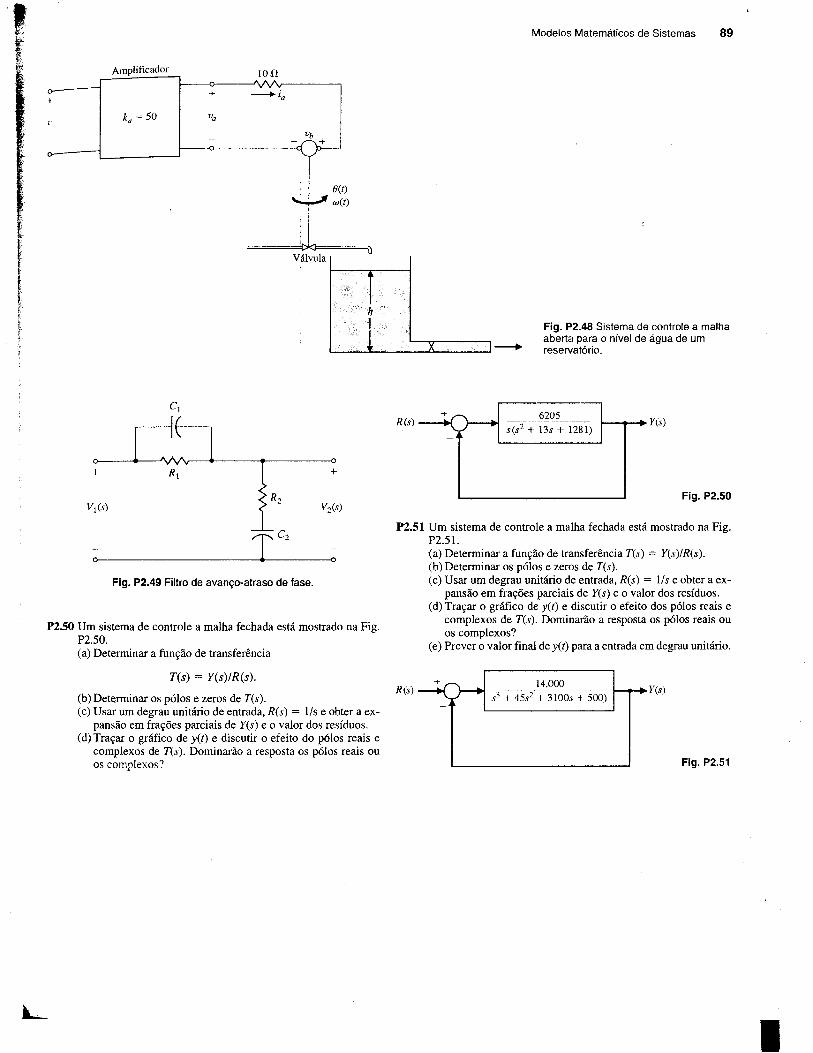
P2.48 O nível de água, h(t), é controlado por um sistema a malha aberta, como está mostrado na Fig. P2.48. Um motor CC controlado pela corrente de armadura ia gira um eixo, que abre uma válvula. A indutância do motor CC é desprezível, isto é, La == O. Igualmente, o atrito de rotação do eixo do motor e da válvula é desprezível, isto é, b = O. A altura da água no reservatório é
h(t) = I [1.68(t) - h(t)]dt.
P2.46 Para utilizar a vantagem da força dos manipuladores robóticos , . , . , e a vantagem intelectual dos seres humanos tem sido examina- A constante do motor e Km = 1 O e a mercta ~a arvore do mot~r da uma classe de manipuladores cha~ados extensores e_da vál~ula é J = 6 X w-3 kg-m2. r:eterrnmar (a)Aa ~quaça~ (extenders) [23]. Um extensor é definido como um manipulador dtferencial para h(t) e v(t) e (b) a funçao de transferenc1a H(s)
ativo usado por um ser humano para aumentar a força humana. / V(s~. . . , . o ser humano fornece uma entrada U(s), como está mostrado v"'Í>2.49 O ctrcmto mostrado na, F1g. P2.49 e chamado um filtro de avan-na Fig. P2.46. o ponto terminal do extensor é P(s). Determi- ço-atraso de fas: e sera usado Ano _Cap. 10. nar a saída P(s) devida a ambos os sinais U(s) e F(s) sob a (a) Obter a_funçao de transferenCia V2(s)/V1(s). forma (b) Determmar Vz(s)/V1(s) quando R1 = 100 kfi, R2 = 200 kO,
C1 = 111-Fe C2 = O,lJLF. P(s) = TI (s,'lf(s) + T2(s)F(s). (c) Determinar a expansão em frações parciais de Vis)/V1(s).
(o.) v~/>Jl = {_~o~)(.l-+ 01o.v:~)/(J.+01~){J-+ O(o~) +- 0,02...!>
éb)'h/vJ. == U-+t.)LJ+2.t.)/U+~){.1~2..)+ q"'l o>
l ~ i •·
~A __ m~pl_ifi_Jc_a_do_r~~--~----~10i~l~------~ ,.._-------"1
Válvula
h
+ +
Ic2
o~-------------------------~--------~0
Fig. P2.49 Filtro de avanço-atraso de fase.
P2.50 Um sistema de controle a malha fechada está mostrado na Fig. P2.50. (a) Determinar a função de transferência
T(s) = Y(s)IR(s).
(b) Determinar os pólos e zeros de T(s). (c) Usar um degrau unitário de entrada, R(s) = l/se obter a ex
pansão em frações parciais de Y(s) e o valor dos resíduos. (d) Traçar o gráfico de y(t) e discutir o efeito do pólos reais e
complexos de T(s). Dominarão a resposta os pólos reais ou os complexos?
R(s)
Modelos Matemáticos de Sistemas 89
Fig. P2.48 Sistema de controle a malha aberta para o nível de água de um reservatório.
6205 1--+-+Y(s)
s(s2 + 13s + 1281)
Fig. P2.50
P2.51 Um sistema de controle a malha fechada está mostrado na Fig.
R(s)
P2.51. (a) Determinar a função de transferência T(s) = Y(s)/R(s). (b) Determinar os pólos e zeros de T(s). (c) Usar um degrau unitário de entrada, R(s) = lls e obter a ex
pansão em frações parciais de Y(s) e o valor dos resíduos. ( d) Traçar o gráfico de y(t) e discutir o efeito dos pólos reais e
complexos de T(s). Dominarão a resposta os pólos reais ou os complexos?
(e) Prever o valor final de y(t) para a entrada em degrau unitário.
14.000 Y(s)
s3 + 45s2 + 3100s + 500)
Fig. P2.51
I
90 Sistemas de Controle Modernos
PROBLEMAS AVANÇADOS ____________________________________________ __
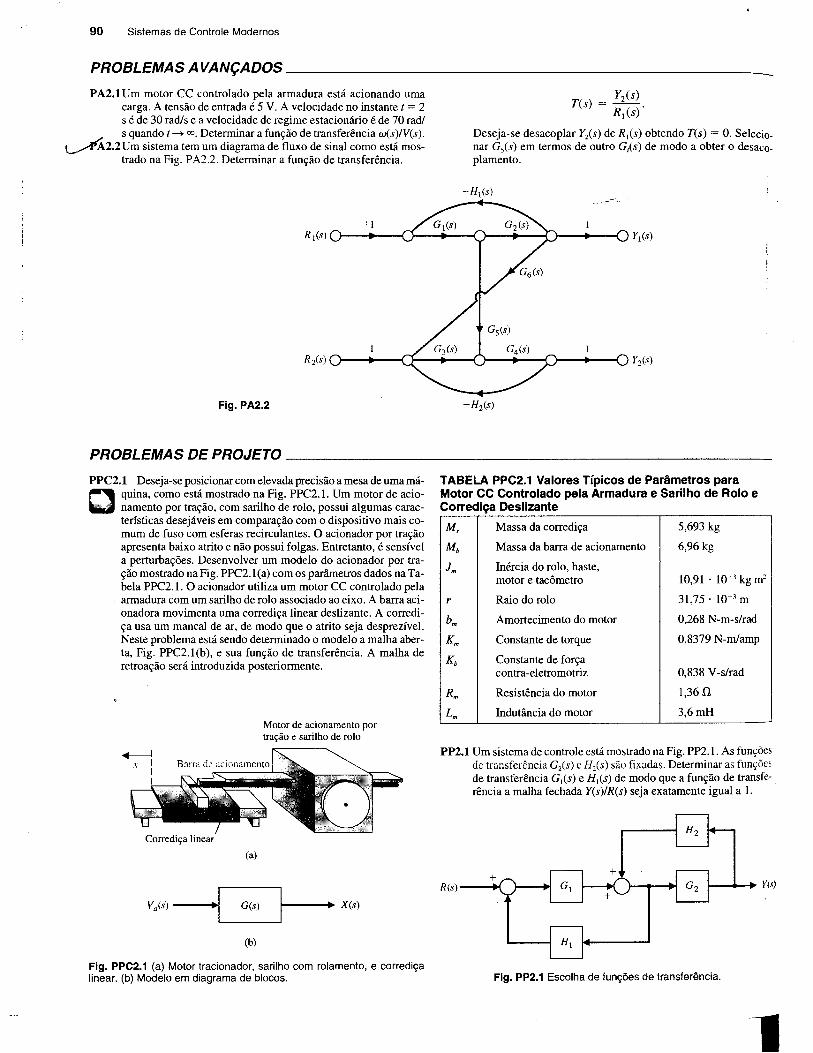
PA2.1Um motor CC controlado pela armadura está acionando uma carga. A tensão de entrada é 5 V. A velocidade no instante t = 2 s é de 30 rad/s e a velocidade de regime estacionário é de 70 rad/ s quando t~ oo. Determinar a função de transferência w(s)/V(s).
~2.2Um sistema tem um diagrama de fluxo de sinal como está mostrado na Fig. PA2.2. Determinar a função de transferência.
Fig. PA2.2
T(s) = Y2(s). R1(s)
Deseja-se desacoplar Yls) de R1(s) obtendo T(s) = O. Selecionar G5(s) em termos de outro G,(s) de modo a obter o desacoplamento.
PROBLEMAS DE PROJETO ____________________________________________ __
PPC2.1 Deseja-se posicionar com elevada precisão a mesa de urna máM quina, como está mostrado na Fig. PPC2.1. Um motor de acio., namento por tração, com sarilho de rolo, possui algumas carac-
terísticas desejáveis em comparação com o dispositivo mais comum de fuso com esferas recirculantes. O acionador por tração apresenta baixo atrito e não possui folgas. Entretanto, é sensível a perturbações. Desenvolver um modelo do acionador por tração mostrado na Fig. PPC2.1 (a) com os parâmetros dados na Tabela PPC2.1. O acionador utiliza um motor CC controlado pela armadura com um sarilho de rolo associado ao eixo. A barra acionadora movimenta uma corrediça linear deslizante. A corrediça usa um mancai de ar, de modo que o atrito seja desprezível. Neste problema está sendo determinado o modelo a malha aberta, Fig. PPC2.l(b), e sua função de transferência. A malha de retroação será introduzida posteriormente.
(a)
V0 (s) ·I G(s)
(b)
Motor de acionamento por tração e sarilho de rolo
• X(s)
Fig. PPC2.1 (a) Motor tracionador, sarilho com rolamento, e corrediça linear. (b) Modelo em diagrama de blocos.
TABELA PPC2.1 Valores Típicos de Parâmetros para Motor CC Controlado pela Armadura e Sarilho de Rolo e Corrediça Deslizante
MS Massa da corrediça 5,693 kg
Mb Massa da barra de acionamento 6,96 kg
Jm Inércia do rolo, haste, motor e tacômetro 10,91 . w-3 kg m'
r Raio do rolo 31,75. I0-3 m
bm Amortecimento do motor 0,268 N-m-s/rad
Km Constante de torque 0,8379 N-m/amp
Kb Constante de força contra-eletromotriz 0,838 V -s/rad
Rm Resistência do motor 1,36!l
Lm Indutância do motor 3,6mH
PP2.1 Um sistema de controle está mostrado na Fig. PP2.1. As funções de transferência Gls) e His) são fixadas. Determinar as funçõe' de transferência G1(s) e H1(s) de modo que a função de transferência a malha fechada Y(s)IR(s) seja exatamente igual a l.
+ Y(s) R(s)
Fig. PP2.1 Escolha de funções de transferência.
Modelos Matemáticos de Ststemas 91
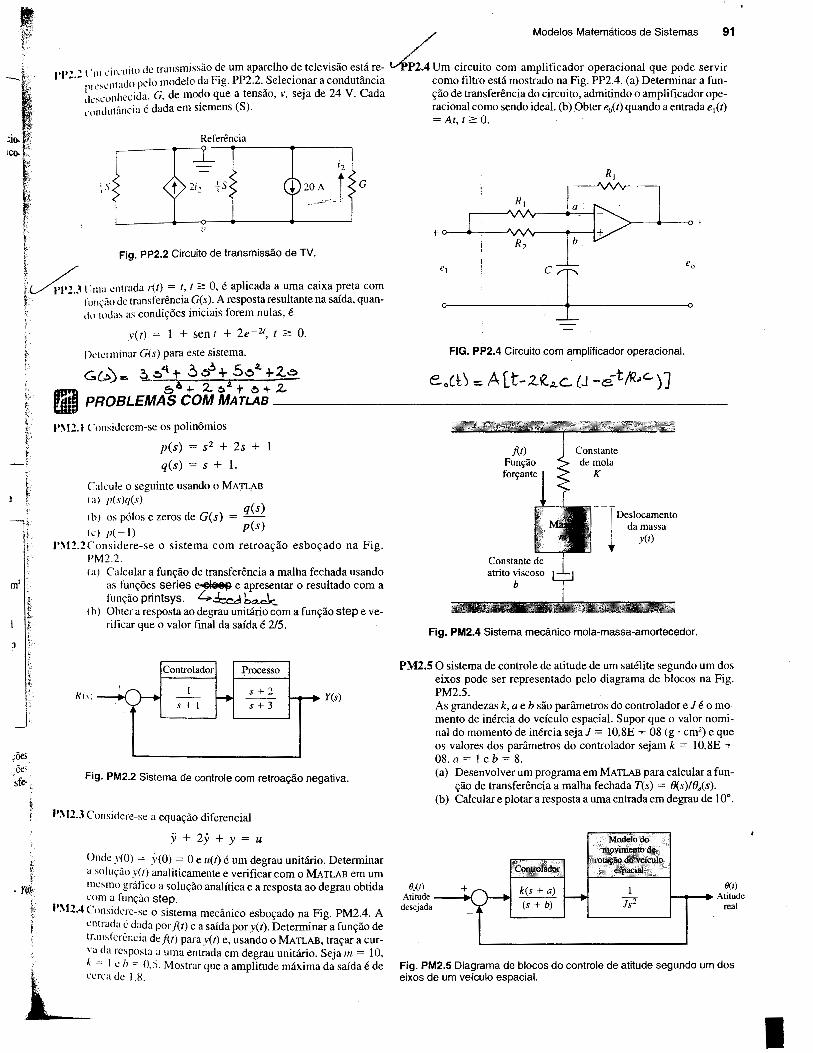
, ., , <. , ciccoH» de '""·''";.,;o de om •p~lho de <ekv;•ão "" re· Lm dreodo c~m •mphfi"doc opemcioMI que pode "";' 1 1 ~·~ 1 ~,entado pelo modelo da Fig. PP2.2. Selecionar a condutância como filtro está mostrado na Fig. PP2.4. (a) Determinar a fun--~!- ~;~~conhecida. G, de mo~o que a tensão, v, seja de 24 V. Cada ção.detransferência~ocircuito,admitindooamplificadorope-
,·ondutúncia é dada em stemens (S). ractonal como sendo tdeal. (b) Obter e0(t) quando a entrada e1(t) = At, t 2: O.
. "' ;1().~; lCQ. t<
t t , ~
r.
Referência
20~_,_ t
r / Fig. PP2.2 Circuito de transmissão de TV.
G
fl../'Í•J'.!3l'ma entrada r(t) = t, t 2: O, é aphcada a uma ca~xa preta com l fun"·iio de transferência G(s ). A resposta resultante na saída, quan-l· do todas as condições iniciais forem nulas, é
y(f) = l + sen t + 2e- 21, t 2: O.
Dl'laminar G(s) para este sistema.
GC.>)::. ~ ~4. + 6 63 + 56-t. +2.ó
>-----o+
c.T o~--------=:t=~---------o
FIG. PP2.4 Circuito com amplificador operacional.
tP.ml óõ+- 2..::.1+ 0-!-.2. U1UJ PROBLEMAS COM MATLAB -----------------------
ml
f, ~-
" ~
o
~ I· . \
;ões
t':\1.!.1 Considerem-se os polinômios
p(s) = s 2 + 2s + q(s) = s + l.
Calcule o seguinte usando o MATLAB
tal p!s)q(s) q(s)
(h) os pólos e zeros de G(s) = --tê) p( -I) p(s)
I':\1.!.2Considere-se o sistema com retroação esboçado na Fig. PM2.2. ta) Calcular a função de transferência a malha fechada usando
as funções series ~e apresentar o resultado com a função printsys. 4~ bo_~
(h) Ohter a resposta ao degrau unitário com a função step e ve-ri ficar que o valor final da saída é 2/5.
Controlador Processo
}( (.\ J s+2 Y(s)
s + 1 s+3
. õe, sfe·\ Fig. PM2.2 Sistema de controle com retroação negativa.
1':\12.3 Considere-se a equação diferencial
ji + 2y + y = u
< Onde r(O) = .\·(0) = O e u(t) é um degrau unitário. Determinar r a \olução y(l) analiticamente e verificar com O MATLAB em um
• y(l\i mesmo gráfico a solução analítica e a resposta ao degrau obtida , com a função step. ~' 1':\12.4 Considere-se o sistema mecânico esboçado na Fig. PM2.4. A
<:ntrada é dada porf(t) e a saída por y(t). Determinar a função de transferência de.f(t) para y(t) e, usando o MATLAB, traçar a curva da resposta a uma entrada em degrau unitário. Sejam = 10, k = I c h = 0.5. Mostrar que a amplitude máxima da saída é de
L"'""''·"·
j(t) Função forçante
atrito viscoso b
Constante de mola
K
-- rDeslocamento da massa + y(t)
Fig. PM2.4 Sistema mecânico mola-massa-amortecedor.
PM2.5 O sistema de controle de atitude de um satélite segundo um dos eixos pode ser representado pelo diagrama de blocos na Fig. PM2.5 . As grandezas k, a e b são parâmetros do controlador e J é o momento de inércia do veículo espacial. Supor que o valor nominal do momento de inércia seja J = 10,8E + 08 (g · cm2
) e que os valores dos parâmetros do controlador sejam k = 10,8E + 08. a = I e b = 8 . (a) Desenvolver um programa em MATLAB para calcular a fun
ção de transferência a malha fechada T(s) = ()(s)18is). (b) Calcular e plotar a resposta a uma entrada em degrau de 1 oo.
Conq:u]adol:
A~ft~~e---!()--+ k(s +a) --+ desejada _' (s + b)
Modelo do lu<>vi.m:éoióde
tó,tl~Çiio 4ó.Yêíé~o ····-~
IJ(t) t-.,...--1~ Atitude
real
Fig. PM2.5 Diagrama de blocos do controle de atitude segundo um dos eixos de um veículo espacial.
I
92 Sistemas de Controle Modernos
(c) O valor exato do momento de inércia é geralmente desconhecido e muda lentamente com o tempo. Comparar o desempenho da resposta ao grau quando o momento de inércia da nave espacial, J, for reduzido de 20 e 50%. Usar os parâmetros do controlador k = 1 O, Se + 08, a = 1 e b = 8 e um degrau de entrada de 10°. Discutir os resultados.
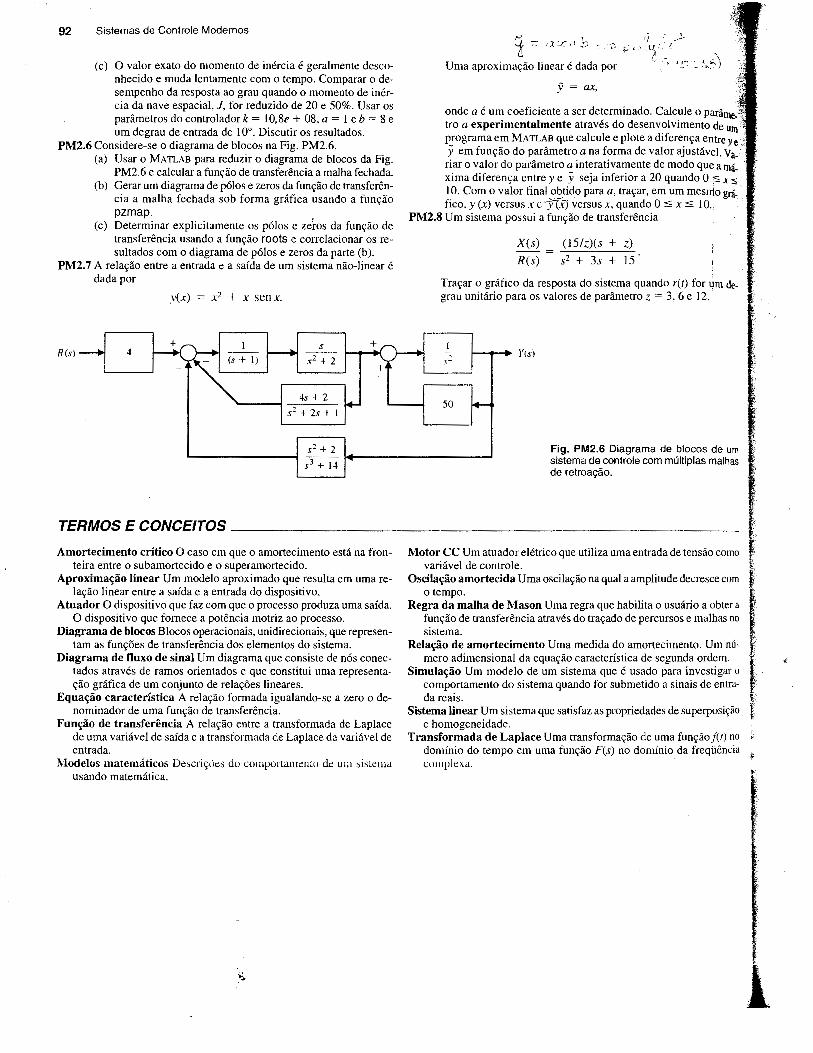
PM2.6 Considere-se o diagrama de blocos na Fig. PM2.6. (a) Usar o MATLAB para reduzir o diagrama de blocos da Fig.
PM2.6 e calcular a função de transferência a malha fechada. (b) Gerar um diagrama de pólos e zeros da função de transferên
cia a malha fechada sob forma gráfica usando a função pzmap.
(c) Determinar explicitamente os pólos e zeros da função de transferência usando a função roots e correlacionar os resultados com o diagrama de pólos e zeros da parte (b ).
PM2.7 A relação entre a entrada e a saída de um sistema não-linear é dada por
R(s) 4
y(x) = x2 + x senx.
4s + 2
s 2 + 2s + I
:.,.. .....
Uma aproximação linear é dada por
Y == ax,
onde a é um coeficiente a ser determinado. Calcule o parâme: tro a experimentalmente através do desenvolvimento de um' P!ograma em MATLAB que calcule e plote a diferença entre Ye
y em função do parâmetro a na forma de valor ajustável. V a. riar o valor do parâmetro a interativamente de modo que a má. xima diferença entre y e y seja inferior a 20 quando O :s x :s 10. Com o valor final_o!>_tido para a, traçar, em um mesmo grá, · fico, y (x) versus x ey (i) versus x, quando O :S x :S 10.,
PM2.8 Um sistema possui a função de transferência
X(s) (15/z)(s + z)
R(s) s2 + 3s + 15 ·
Traçar o gráfico da resposta do sistema quando r(t) for um degrau unitário para os valores de parâmetro z = 3, 6 e 12.
t-....-+ Y<s)
50
Fig. PM2.6 Diagrama de blocos de um sistema de controle com múltiplas malhas de retroação.
TERMOSECONCBTOS ______________________________________________ __
Amortecimento crítico O caso em que o amortecimento está na fronteira entre o subamortecido e o superamortecido.
Aproximação linear Um modelo aproximado que resulta em uma relação linear entre a saída e a entrada do dispositivo.
Atuador O dispositivo que faz com que o processo produza uma saída. O dispositivo que fornece a potência motriz ao processo.
Diagrama de blocos Blocos operacionais, unidirecionais, que representam as funções de transferência dos elementos do sistema.
Diagrama de fluxo de sinal Um diagrama que consiste de nós conectados através de ramos orientados e que constitui uma representação gráfica de um conjunto de relações lineares.
Equação característica A relação formada igualando-se a zero o denominador de uma função de transferência.
Função de transferência A relação entre a transformada de Laplace de uma variável de saída e a transformada de Laplace da variáYel de entrada.
Modelos matemáticos Descrições do comportamento de um sistema usando matemática.
Motor CC Um atuador elétrico que utiliza uma entrada de tensão como variável de controle.
Oscilação amortecida Uma oscilação na qual a amplitude decresce com o tempo.
Regra da malha de Mason Uma regra que habilita o usuário a obter a função de transferência através do traçado de percursos e malhas no sistema.
Relação de amortecimento Uma medida do amortecimento. Um número adimensional da equação característica de segunda ordem.
Simulação Um modelo de um sistema que é usado para investigar o comportamento do sistema quando for submetido a sinais de entrada reais.
Sistema linear Um sistema que satisfaz as propriedades de superposição e homogeneidade.
Transformada de Laplace Uma transformação de uma funçãof(t) no ~
domínio do tempo em uma função F(s) no domínio da freqüência t
complexa.
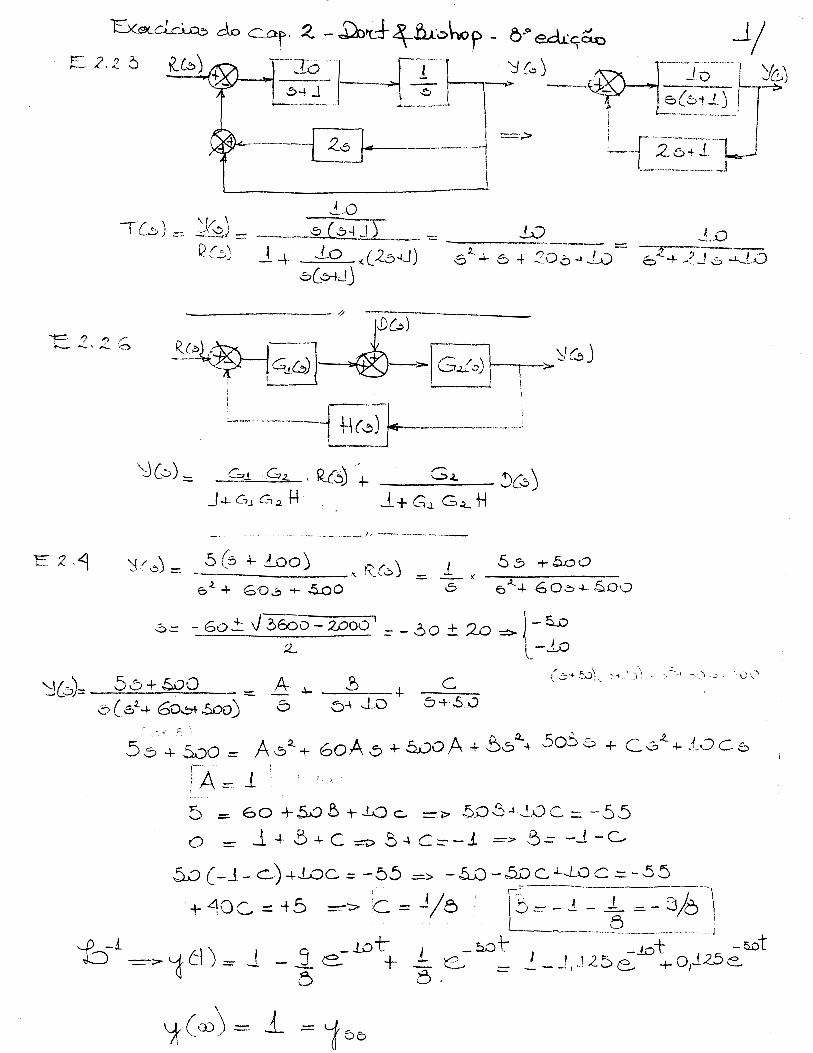
E)(~~ do car· 2 - .D.oct ~n.l'D~p - f;·o ed.Lcr~ c z.2 ~ K.c~)
""t===- ? ') ·"' "- ...._~ ,.._ v:::)
G_t_ G.z_ . R_(S) + -'+C-u G:2. H
5 (s +- lo o) 0 / _ \ 1
==>
5:::> -+Ó.OO
!
i {""-'·"----·-·---~·--· =----- 2 6 -1 J_ ---~~--~--........-.-----·~-·
_______ .. ·'\..>-..::>) = - ~
6~ + GV~ + .5..o0 6 e,~+ 60.::, +- !S..Dv
ó.::: - _6o.±. J 36oo- :woo = _ óo + '2o-=>)- 5..o 2- t_-J.o
5õ+~O = A~ s + __ c_ õ(e/-+ 6o~.soo) 6 ô4 -.LO 6+50
- - "' r:.
5,s + Soo ::= Aõ:t+ GoA-? + 6.DoA + ~6:l..+ 5o~ s + c 0 .2_ +- .Lo c 6
~-- i _iA::: 1 i ' I'
5 = 60 + 5,.::) .& +..LO c. ::::-.';;> 50 5 .l J.0 c = -55 o = l + s + c :::-:::> s 4 c = -l =-> 5 = - J. - c,
5.{) (-J- c.) +l.OC = -b5 => - 5..()- .5D C WD C.::.- 55
+ 1 o c d s =-> :c = J I e · [2l- ~-=-=- ~ ::__:-_:J!ô-1 '-P -i \ _J.ot- 1 _5_0-\:- _JD-t i -5Dt o -=-> Y· C:l J =- J - j_ e + _ e _ .!_ _ _ 1, .~ 2 2> e... + o1125 e
c 6 ó' -
C ..L
------//
i= -kx_)=
(i-doJ:
l "-1 ,_c -b) _ c..2...=, -------------.-- >~--
\)J_ C~) _!_ + L o +- _b_ C._j_ô c...:L b
c.1 w. 5
C.i = J&~L C_t C-.1_ Ló ..t_ + C.1 + C...2.. 6~ + C..t +C:~.
clc:4 L
~ -t- __s::.. .4. +- D 6+-S (~) ó-+ .i
(5+5)[ ,:/--+ 2 ô4 J) =
:::: !:::>;; .\- 2-b ~ -t ó ~ 5~ ~-+ 10-::> + 5.::
:::: 5~ .1.- 7.f/-4 _! _\ ~ 4- ó
Z,-56"~- -S:::: A.:/>..~,- 7 A.:}-+.! J ,A.s.;,. 5A + <1 5-õ~ >-~ 65-s .4. 4 -.1 Só + .:'\ Cõ .t-.~- zoe..~ +-
~-A~ l ! + ~ü-.:J3 +2.<:1.Dã~'"'"" w Dó
o:::: J::-~-~--8 4 4 D --~ 6 + D =- -J/1 (3) ::->\5-~-o,2.S ~6~.i..7~'1::op2-'~4 ,_- --- - O =-- 7 + 8 6 4 LI c .. + Z -1 D =~::> 2_ ~ -1 c. +- G J) = - 7/ L\ -<- ,5 = ._. ( J J
2,2> = J ..L 4 ..r\!) -1- 2.0C+..(O D =V Ll5+ 2.0C+20D=- 5,5 0--)
( J) ~ > J_O s ... 5 c-+ 30 D = - 3~/LI ~I(~ :> 4® + 2~ c_ + J 2 o D = - 6 ó c__ :c) _::::-'i> ~ ~ -t- 20c... + 2"o.._f)::: - 8, 5 J =-,> L\ 6 +-- 2n c.. + W D == - 6,5 ---------------
R o = 1..0. coo .!L
lo= :2.0°C..
,-R- Ro = JK \ é-r -lo) = - o,j_ R o e 0
'-'-10
(T- To) dt
T: 'To
/j
Dc-s) 1<1 \{4 :::: ? '(/ KG):::: o > DG) f:- O
c. 'j{_õ) :::::.-0 (_ --Je-Lc.u~ nàb ~~)
1---T--)1 L"') ~ E.= I'< - ~-' D - ~ L-----...1 l 'j = G ( t::J< .L 4- j))
\....
'J= (R.-KJ..'D-'Y) K:z..y+D~
DL~) -=-~--------~+.x..~-~ G(~) t------.---"::roo
~ k~ t ~ v. I·,:~ '·'' ", \ - _( ~ \t .\ . ':J ( J + ~:t G) = . ,, ·. _, . ""'.J - \u-:~ J)) = R K.2.. G- \<1 k' :t D G +- .D G
f.( = :J = o =~ '::Jc ) .
.l---r--.,_ :;; - \{l I(J) G + j)G, =- o
S>G (J.- KJ lé:1J :-o
I~ K.2= 1
E2.28
Kf5) i ' 1 6~1ol :/~) ~- ,,\ ' "-~"
I ~
EZ.Jô
~+ó ~- -~h:) \
'-' -~)'f •• -'!oi: :--11:)' ·' l_[,
I .
! ,..... .. >~
~ . .:., 4 'c:· ---~~ :.,)[en-~-~)~(.:,~.lo") l ~>J; _____ , 6+iD)
I l .......
õ-+-LO ó+0
1 r 6+-5 L J 1 l
1 ~Cô) ---=--- 1------r--:> c 6+6)( õ-t..lO) \
\...------1[ 26-rJ 5 ]~-.i
!.: --
.____ \ 1
1 l_
- -6.2.1-Jó~+-50 i" 2.10+.!.-5-6~+17b+ 65
---··· ----------------~~-- //
c.. (õ + .s)
(,::,+3)[,:,~6) ~ = 6::.. ~ 5::, .. -1 5
Jo 6 +- zo ::: A.s '-4 ó A .s-+ 15 A j_ 3-s;_ -t 55.::;) -1- c õ.2.-~. b c. v
A;. 1/~ = 1,~~/ lO = .32.. + 5 S + 6 c. => .io = ~ ~ ~ .1 5 S +- 5c ='~>- 15 b-+- 8 c.=- 2.
-:3
J. 6 (?)o~-- '3 C:=- 2.. G. 6 = __!O =::> S = 5/~ = .1 \(;G 7 + :J ~ -t 3 c... ;-l.Z., J
ó c;.; J ~ +- o c - -~ =-~> c. :::. - 2. 7 I o. - - ::.. // ............... ~/Y -> - /v- v~_,..
\ -3+· -5t '-{- r·\ .l = J ,33 + _! \ 66 7 .:~ - 3 ~
\,
C-------··-
64 !)
3 =- Jo c~+ ~) - /.~õ'J\ :::-óC~+ôJr..s+ !)) e~-6
E.2. 2_!:>
,,v
k= _i N/~-1
b.l~ b,2.::0
dv~ ~ df
k_ (:~.J - z:_,_) = F
Q
M ~ c12..~2 + b..2.. c(,;.l-+ d1"- - d t
~
\~-L 6.2.-~es) ..~- KxtJt!:>) _ "K'<~c~,)= r=-t..$) í \,~ ~,..~ !)._ 6:1.. X.~()) -+ k '<:!l.::)- \(X..!. C2:>):::::: O
X .L ( ól. +- J J = F + X.2.. ::-:-·1:.· x..! .--::::. E_+- >(~ 5.24 l
>(.2_ c~ !1..+-') =- >( .1 = F +-X.2_
v .i ~~ ------------- 1 F
- ------------------// --------
~(ã)- 2...~\ -=--- -R. c..::.) õ ~ +- ~o 0 -+ z.oo
_1_. -~2._'\...:.___ õ ó.t-+ 30õ +200
( ~· lO) c""+ )_o) 2..24 ==_6_+ 5 -+ c..
6(6 +-'0..:>+2.00) ó 5-LlD ó+ 2.0
Z..L\ = A 6~-+ 3oA~ + :woA +- Bõ.t +205.:> ..~- Cô:J_~ ..1oc6
2 '\ =- 200 A =-v! A::: o,l2..
o = A+- ..B -t c... =~54 c = -o,J2. '<. '2.0 =~ 20S +- :2Dc =--<~·é\
o = 3oA -+ 20 B +J.o c :::.~> 2oS ~-toe= --5,b
1 - o 1 2.. ~ JOc. = J,:<... : '--:::-:- ,- ---
~ +o,.l 2..=- o,1.2... => \-B _ -__:0,2 4 \
':::1 (..:>) = o) 2 _ o,2 ~ cJ2 J__ ~--J ____ _
e> b-+ .Lo ó -t.J t?
c) MA iWiÓ: '(\).)._«) = 2. ~J der, = [.!.. .3 o 2-ooJ ;
ó-\-e.p C '(Lt).v·r;J den) ~

_l J lJ dt" - J:. SL2. c\ t - ljt_,_ dt =- R_ L _ R_-2._ (._1 -+- L:J.._ d l;_ ;: :.- d_ C_t C.!. C 2_ 2.. d. t c\t
.1:_ L1 _ 1:.. L.z_ _ J_ i_ 2.. = Q.t. d l.~ - R.2.. cll.L + L.t.. d \:f" c..~. e4 c.2. d "t clt cl t
.1_ L .i. + (( 2. d i.l = (1...+-~ \ L.2.. + R .z. d La .. +- Lz. d2.t.z C.J. Ót C.! C.t..) di:" d.X z
À ó+.l
+
j(~) = _.:i _ J,!::8 +- ~ _ 0 1bh7 +- o,LS .52_ õ ~j_ .5 + o b4 4
+-ó+·LI
E +---5+1
~\) = -t -J ,:)() -1 2. éT- o,66 7 e.- õt" -L01LS e~(- =>'â(J,~) ~O ,!>GO

VJ-é~ (}J. +- cj.!. + R~
R..t. R.1 R2..c e+ R .2.. 5 +- ljf<..J..C = -
RJ. R.:l..c s +- '1{.1 + R-2. ó -t- ~.! + ~ ~~c
12 2_. b
j(v) = õ6
.Jr 2_e"- ~ ::J +- 2.. + 6.2.-+ Zt:> +2.634-2..~::. 3~./; + ~ô2.. +-56+ 2 (ó3 -+ ó)(ó+2..) 6 4 -r b:L 4- 2..63
4- 2._6
'JC.õ) = ~r:})-+-!;::/·+ 5 ó + 2 :. G(.:;.J-< R:G:>)
G{~)
6" ~ .z....s.3 + 6 :l..-+ 2.s
-'õb+-.3-e/·+5~+2. "-::;L = 6.tr9+- z 6-0+ _sz-+-u = 6 6 ~ 4- 3 5.3 4-__ 56 .::_: 2..6
ó 3 + 2_s"- -+- 6 + 2.
--···-// -------. tv\ 4 1- b 4 + k l{- -= H_(-j )
di dt c
b -~
"fa~1ctéN) 6_ f-~o.= k_ ,6_1
_ _:;....-~~>---·-r~ 'i[cl"r)J 2..
\< _ ~r= 3,o N -- ~ ~t 3Jõm
k =- J 00 N/\v") &...L. -.L
~
ctS
"C
16
~- ctS
C
/) 14
12
10
8 6 4 2 o
Exe
rcíc
io E
2.1
Do
rf
C~.Je.À~ta.éwto.e1Ck-Abf>tto.)
y de
mal
ha a
bert
a -
-Err
o -y d
e m
alha
-fec
hada
't
=e:~
.. = tt.
. .t..
( .!-
) c\
,a'll
e-~o
.daú
vto_
6-,a
-ho
e.==
H_-
tf C
z.)
5.-tbb
iT tw~ a
) cr
n (g
).. , I
I .,
..I
, I
_L_A
l)
I I
I I
I I
I I
I I
I I
I I~
I I
,_
-I--
I--+
--
+---
+--
+--
+-
+-
+-
+-
+-
+-
+--
+--
+-
-4
---l-
--l-
--l-
--l-
-1
--1
--I-
-I-
-I-
-I-
-I-
-I-
-I-
-I--I--
f--
I--I--
I--
r--I-
-+-
--I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I ~
I I
I I
I I
I I
I I
I I
I I
I ~
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I~
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I ~I
I I
I I
,_-~-~-
~-~-~-
~-t-
~-7-
7-~-~-
~-~-
~-~-
~-~-
~-~-
-:--:-
-:--:-
-:--:-
-:--:-
-:--
:--:
--:-
-~ -~-.-r-~-~-~-~-~-
I I
I I
I I
I I
I I
I I
I I
I 1,
.. I
I I
I I
I I
I I
I.,
I I
I I
I I
I ,
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I ,_ -~-~-~-~-~-~-
T-T-I-~-~-~-~-~-~-~-~--,--,--,--,--,---
-,--,-------
-,-.-,
1'-,-
-,--,--~-~-~-~~I~
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
fll'1
I I
I
I I
I '
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I fll'
I
I I
I I
,_~r~ r~ r~ r--r-r-r-r-r-
T-
T --
r --r--r--r-~-~--,--,----,--,--~--~--~--~--~~-~--~-,~--~--~--~--~--r -r -r-r-r-r-r-
I I
I I
I I
I I
I I
I I
I I
I I
I I
rf/1
I I
I I
I I
I I
I I
I lll
fl'
I
I •
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
jllll
I I
I I
I I
I I
I I
I I
I ,_
-I-
--I--
-1--
-+
--+
--+
--+
-+
-+
-+
-+
--+
--+
--+
----4
---1
---1
--1
--1
--1
--1
--1
--1
--1
-+
--1
--1
--1
--1
--I-
-I-
-1
--1
--I-
-I-
-I-
-I-
-I-
-I-
-+
--
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I 1
-'
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I •
I I
I I
I I
I I
I I
Jilll1
:z._
e..
+e.
. -l-
l= o
fb
'l-eK
·) ~H..=l -
l>~=
-q,6
.1ô
i =0
13Bj~
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
1_,
'f
I I
I I
I I
I I
I I
I I
I I
I I
I I
__
L_
L_
L_
L_
.L
_ .
L _
_.L
_ .i
_ _
i_ .i
_
_l
_ J.
_ ...1
_
...l _
...l
_
...l _
...l
_
_j _
_j
_
_j
-11-
1 _
_ I _
_ I _
_ I _
_ I _
_ I _
_ I _
_ I _
_ I _
_ I _
_ I _
_ I
__
I __
I __
L_
L_
L_
L_
L_
L_
I
I I
I I
I I
I I
I I
I I
I I
I I
I I
....
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
I I
.-1
I I
I I
I I
I I
I I
I I
I I
I I
I I
I 1_
, 'f'
I I
I I
I I
llllllllllljll
11
1
1
I I~
~ _ +
_ + _ +
_ + _ +
_ ~ _
~ _ ~-~ ,
_I
I I
I I
I I
I 1
..
1 ...
I I
.0
.. 1
• I
~-~~-~~~--~-~:~
I I
I I
I I
I I
e_
~~-,
-J.~e-:
{~~-t--~
~-=
.-~~Jr;i. ~ + t{
' }
_""',
:<>_
.=
j__
.:.'l
( -1
_
; ..
(
-'-
4 '
.t'
,.
_.__
1-!.
~ 1
...&
;....
.1 -
'f:::: t
C-
J}t+
0 1i5
' ~ 0
15
Ç) Ç)
~ Ç)
~ Ç)
~ Ç)
~ ''~
'~ '~ '~
~ ~~ ~~ ~~ ~~ ~ ~~
~~ ~~
~~
~
Ent
rada
r
;;..
~
1 Gu_(-5) C.:tL~)
~l .. ~~(,:;.1(,)
1 j e>t~=t> .Q.i = G .1. G .2.- 1 lcu;.o => L.1. == - GJ. G.2.. H-
Jé~) =- _ G.L Gt2.. e_c_,) .1 + G-1 G,_ti
l ..í>en_cux~ =>2 j_ == K G.1 G.t. 5
L\ La...~ -=.> L J. = - G.l G.2... ~j_
)._6 := - G .. L \4 ~
r eh MJJ.~ o.. "-A o_~ n => 'J é~ =Réb)
";}(6) = ______ K_G_::"\_J. _G_".,!_/_õ ______ _
J +- GL G,2._ H- J t G.L G.L ti .2. + G.L ~ õ + I< G.L G 16
YC5) _ -:-----l(.:._G_::..l_G_2....L/-=-s---
ÇZc!")) l + G1 t\ ~ + G.L G ~ ( HJ. + 1-\ .2. +- Kj.s)
-------/!
!::I~--= Q_ -Q o = d Q_ \ 6.Q. ONle- 62::. J-2-62-o d!:S.
t:f:ilo
AQ-::= W- Qo = \(_ ·À~ 2_ JJJ;
~. 2 J. - X 2- = O C_ rne..e. mo... ,~ (:)e.Õ.O eWJ ~b. 06 P .o.Ó-P ,. d.P e'tlA { ciu J =i>
'() ã..o nci v cu.à::c = \:) Q = o
J _v &tc.u.>t..ao =-> JJ _ K..t 't(z_
62.-
LJ. =- ~ 6
L .:z... = - l<.t k.2.. ó
t=n~o. Rc~) -> &Ud(À ~C-:>) J ri) V
~c:u.x ~ =-:> ·- J ::: G1.. G.z.
( Qa_c.c.::. lJ e L.õ ~ ~ Gca ~ e Ípdp.)>
to-eo-rn Y..t J ~'f', ·--·-- . \
~-, '·~
2_ L aro~ .::-::-> L.1::::: - G-1- G~ \-\..1 e... L-<-=- c,_, c,~~\ L,_
~G~·-- __ _,. __ ~_,_,.,._,,.._. """'"'"'-~''"""...,..

E2.J õ
R .. L
G,7
G-=t ~--,_~~~~~--~~ ~~
L.2..=- c., 5 G8G 7
L õ = - C,s+\:t.
CJ =J;JJ).r:
---~" 1 t---··-, 1,.---~I\A.tt-----...l_-. ..........,.
'"'="" ':P '::h - ? ~-'
2. 2 eh_c;.u.}t_~ '.
J>J. = G.q G!:> G~ G3
'\) :z_ -= G" G5 Ge> G.:~. :::;~
((.! C.t.6 .1,. J.
joü,_,J ><Jo)(_t6~\} ___ -:::: 0 +-L =-
loo,... 1o\. 5 >( J.ó ~-l ..L Õ ,56 + .1.
.l
'>J RJ_=1t.7k1L'
'
r 'Y
4 ~ '"'?
R~ ,z1 ~CJ..ol(~ 100 \tn.. <(,- - ----~-.l<(--
Rt ~c I b!~ l \(..()... R.l C. e+ .L J.6 7>(1(;3>( l )(-l.ÓG ..s +i
\)o(~)= z__.qo "(Jf>7".10-~+1.)-.: -100 =- 2-10 (Jb,7 b-tJoo) \}(-.:>) J 6 7 T67
-2. 2..2.
~<;a
\="C-\ J = CLbe'0 UJ1> t
'-Jo(!>) = z..q c~+- 51566) \}(~)
/ / / / / / / / .// / ./ t'
l. 2.. 2.. o..) O..no.eo~ F-o~~,a- co~C"nte
(
M.l ó v lL~) + b \J.i l.;?)J + kL \J.l(bJ-\- kl.z. L \}.t{.e.) -V;tú,Jl = FC~) .s 6 'J~.- \..- !> .1 = \} 1-
.r~-= n '- '! M 2.- ó \):1..(~) + Kl2. ( '\}2-Ú>) - '\)J_{~)J :_O --- {ôí!'~- L
6 -4t~'-
[ M.1 6 -1- b +- b ~ bz.J \h(.,)+ (-k;z) \/z.[6) = FC<>)
(- ~) \/_!_[6 ) -1- L ~v~,_~+ k:;2] "z.G) =O
\lc...:::: _!_ lc.=.> c.~
lc =- C.5 \}c.
t--.~, _ c.1 . ...... - j
CJ..
---------------»-------------'E. Z. .l G t - k x. a =? L(:r>e_a}u.'-<.o. ~ e..rn ~nu de Xo = 1
t.} = ~ /:!.::r:. = L-, L 3 k.x.~ A :x.. = 3 k,J":.Ax x_::.:>co
A c! :: 3 k_ L:x:- o~ : AJ :Ac~)-1-c~.)
J?on h:, ele ~o..cõa
I 3 :C0 -::: 1 -1> i
0 .:: i + q ~ >f 1 = 1, L\ · _ , }
+lo% =~ :;c=Xo+A::c.-::: J ,_1 -=-> t = J I 53 21 ---~- -·
.::Co= .Z. ~ (to "'=' 2..+0,~x2.3;: 5 I 2...
-U.o'%~x=:leo+Ax...: 2.12.. -:··> ~ =:. 6 12..53 2_ -
bx : =c.- X.o
Ai=- 2, z.-cq-L = o,.u.. ~ó-=J,bb 'e)C)tO = _e_,~-~ ~o . . . .. t
b,'t = ó,Ô\1( 01 2=l,~f> ->'f=- G,Ob ~~-==-.i ,Ql,_~.% 1
a)
b)
'F- =- \.(_ .:c
d F ::::. k. c\ ::c
~:>C0 = -1, ~ -:::::-;::;. f::..::c = 0,6 C..'N") ->Aí=-= l.S 1'-1
X-o= O =7 ,6,. :::c..~ O,S c rn =->A-F- &_o N Q:
0 : 3, 5 => ,6.x = 0 15 Cff? ..:::::'j)J:::.F = 2. l'f
k_n.l.O.)-{.L~o.ndo ÀF::: k ÁJC.
k_ == 6 F = ~ 5 _2 -= 3000 l--l/rn ô::t:::-- o,..s,...J...D
k = .J.D = .z o oo t-..\ I '('(j
0,5~.10-.2.
k = z. _ 4 o o "Y'I"f) o,.5".10~.z.. -
C ,a. I o-----------------~----c
R:t.4- .b_ C..t.~ _L +- R.2_c:L s
- ---.:::------==::::..:::::..---,- - -----R .L I 1( .2. + .J:_ . Q c R ..L G. 5 _,.. .!.. -1- ~ :L 'Ã 5 4--
R.~. CJ-.5-f 1 C.2..ô R..l C.l~ -4 J
\J.t -::::
{ J -t RJ.. C-1~) (l-1 f<..t.C;"I...s) C"Zi. = l.oO k .n... \~.2..; 2.00 k ...o_ V1
\)2..
\Ú
\la_
\h.
(j-1 12:.Gs)(J-+ R.L~) +- IZ.L.C..2.6
{ 1 + J.oô, ló66) (J -t ,&Jo5" .LÕ 7-.5)
-(J + o,l.s) (J+ opz -:;.) + J.D5~J-Õ7 -s
- (J + O,l-!>) ( J + 010l b J {l~ o,J ~) (J -t o,o2.~) ;. o,Ol fJ
:!:. "' ( J.-+ --'-o o" 2..:/' ... 1.0. JSb6 ) (J-+ '6.J::x::N _,o\ 1 " '·-' ~ ·. ( J--i 6l(l-+ ~) 6\1 -~ O,L\ ó
C.1:: J_ f F
C;;-= O,J .f F
l +- O,l ô
.!o )J. F
LJ 11 ·:! I
.. _,L_ ~L o IQ_~_-? __ ...
1 4 o,J 6
-:Q/?2,:. -1- .),002:}· :t .................... ~----·- -~-'"' ----·
0,00.26 +0~2~-+1 ... A.Q9L? __
c)
j?.(..L\~
\),_ ---,j i o,oo2..6.2..+-0,12.::>+i _ 6.2.+ bOe+ 5oq__
o, 00 2_..s 2. + o, J 3 0 + j_ 6 2. + 6 5 6 + 5o o
S= l,.z. -. 6 o +- J&;~_ ~-;;oo' = - 30 ~ zo {--5o
~ i
8 1 ;:L = - b!) ± VbS2._ ~o~ :::-32,5 ±. L\7,17 :L
(-.LO
Lb-1-ÓO) L~-+ la) - '":!:';\ , . ..,\ l < ( 5+ : . ,o · ) 1
( ó-+ 7<j,67)( õ+J ~,b7) i0=-75,G7
.A
J? Z.l
vCt) -=- R_,_ LJ[1) +- _l_s(_l1) clt + lJ d{tl!)-t:i-ü) + Q:(_ LG(t)-(.2-C-1)] C.t dt
((õ L2-Ct) + _!_jtz.H) J-t + LJ d tb.-6) + R..<- L G.C~)- l1(1)] = o c d~ -
--·---- // -...... . ....... --/1 --------

_j_~
m..t
k, J! 'rY/:4.
)J...é+)
Er· ib:J. ? P/ 'rt)L = Y'ri.L= .L
• I 'I
l<J._~ k.l...= l
( '(()1 c\~ + k.1~x +- k.<. (x.-~) = O \ dt.2.. ~
1 W?,__ 4 + h(i-::c)-= M-li) l cl t 4
.I •I
~------~------0-
\}C=- Zb1J. =@a -t 2c.J1 ~ 12.-= VL.-\Jo
Zo.... --J L--= ~ ~ Zc. ('h-V o)
~
zo... + Zc ""o= \} ( r .Za.~ Zc._ 1] :z~ l Za.
~ -~- " ~- ~-1
\1 o - .Zc. --J( - Zo__ + Zc..
\lo - Zc. - - -··~-·-----
\};__ k+ Ze-
2 f<:2. )l (.i+ ~c.eL~>r.l.) J RL G ~ + 2.. U+ ~ L..õU~.tCó-+.2-J J
~
R..a.Cõ -1- 2~ + 2RJ. ~Cõ( RA. c..&+.z) _Q.(~Cb-\-' Z.'[l + f<lCbl~:t~+ .2.)l {g_:t_ c €:> + ~) C.J + Rt_e;, ( Q,t. c.~+ z_)J - =
~c 5 +2. (.i + R.t. Cô( JC2.~+2 )J
~ ~~-----------c--~~~~--~~~---------------~. f<~~.~ +Z [l_ +L~C RJ..Cô + 2.J.Jj + «~ce+- 2.Ll~2)] ~ [J.+ ~ce(l(.LCó +.2..) J c~~
k ==- ~G!> ~ 2. [J + Rj_C.õ(RILCof2_) J v ( (4c. b -Ç~c ~ -t 2. U + Ra. c~()<,_~+ .i)J ~-+-R-,_c,~e:>-+-2..~(.-l +-Ri-=--_ eo-ü<:-~-Cbt---;~j:-r]
l + {<J. Cb ( R.LCo+ .2-)
\lo _ Q~co .r- 2... Ll-+ R.t c..QC.Q~c.> ~i)]
'-lt_ -t<.z.c~{ R..:~.C.:d-Z lJ +iZtwCR~Ch+.2.)]} + -~C.:>+ Z..[1 4 ~ c..~(~C...!>i-.2.)] 1 + f<.J Cõ (I(~ C.!>+ 2.)
.i f<2. C.e> +i
j + RJ.c~CR..Lc~t.2)
\}0 -= ~ ((, ctõ~ + 2Rl CB + i \}( ~ R:2.. c~ -!>.2. + z ~J. C.ô + ~ Cô + 1
\}o = o ,1.2.5 óa. +0,5ô +- 1 V( o1J2.5 6-t + .s + 1
"'~ - 6.2. + .t\ 6 +- 6 - - ----=-~-7 V( 6R + B ..!) ..,.. 6
- --------------------------------------
- (b+.2.+k.2..) (õ+2.-}=2..) (_ b + G, 82.8~) (.!:> ~ l,l 7.16)
\lo _ ~+2R.tCõ + ~~c~-1 VI.. - A.+ (1.({.1-rf<.2.)C~-\- 1Zt_ ~C}.s.2.
~----- ~~~-
,)<;> '
"---'L
]l= et..- ea.. ~-e,o -:::::~v z e.o.. = e.t...! eo -
R ..L
1 -eb = Cb ::::
et fG. + ___J:._ c.s.
2.- R.~ce:.-1 R:l.C.:;,+l
s -1/R.r.c
s+ 1/RLc
f?.!. <:) e: ,o "---'a. :::. t +- \-0
---~-
2... 1
~eb= 1 R.2..c.õ 4- .L
e ,é R,.2Cô 4 J
- • - R.s..w, ~ eo =- 'R._.z_C.s...-1::.1-~Cb R4 C.64 l e.. .L R.l. C6 -t 1 J +K.l.C~
b-1 Eoé~) = .A _ '2.-Ni:J + 2A/JJ =-v
32.. 5 ó + 8 - J:.. t eo (_ -t) = A t - 2. A R2.. c +- 2.J\ 'R.t. c. e ~~c.
e, C-\.) "' A (-\:- - 2. R.._ C \- 2.. R__,_ C é t;f(.,.c )
eoCt )~ A l t- .z.\Z~_c ( 1- e:t/~c) J
( a! t C\. 1 .2.. l{ J..
~ 2 x-.1 ..+J~óx::L-b ==- X:1.
l 2 X-..1.. -\-- Ó OCJ... -J j = X :L }(_z::::.JJ o--::-...-1-~ :>c 2 G~,!. ú.L~. 't2..
Lac;-o.;,: LJ = 0.11) l-.2-.= O.z. 2 e LD= o_Jz.Ozl ----------..-----------)
nCir> .:'2-L -\;;co. ,.,., 5_) &c.u.>t ~o.;;, d~ :::C J.. : J J_ == - J. ( de l-( J)
~ 2. == - O.J z = -1, Ó l de ~ .1.)
_9en.c..u.>t~C0 ele x. .2 : JJ = -l ( de H. .2-J
i\ = - 0.-2.1. : - 2. ( ele ~ _,)
L == 1
XJ_-= (5-lJ"- b _ J,QJ(J l = ~..:\- J 6,5-::::. 7,5 / /
:2::2.. :. 2_. 6J 'L,2_ ~ YL~2 .b .6
~ ~ ' (J -l) ,d .1 - 2.)( 6 =
(i)" 2 =~ Z. Z.!. + 6 .%.~ ::: 12.. -) (2..) =-i> 2._ X. .l 4 ~I Xz_ = ! _!_ • --
o v f o X.J. -l,5x.:L ..I- 6 = .:::t..L
l- Jjz ::CJ. -t-o =c~ ~Jl = x..~ <:f
:r l L L
':JL lct 'j ~
:I'.z_:- v '--~d-E:> +- 2J/
ZLTC z.l> ~~~J .i .i
_9 = '::1.1 4 '::J3 Z4. -= \-e. c~ Le. c..s - \3-c.t.e>''
11 = (vl-\Jo.) 'J1
] a = (_\lo_- \}.2_) :13
\la._= (_] J-Jo.) ZL
'\} 2 = la. Z.q
\}2. - l \11 L~c.. .a. s 'i + ~ Lcó<- +- l
l Ye>t~~ : 5>..!-= A A lCLyo : Ll=- kA
A ~ 3 >>-O
e...t'o
-r c~)= vo -==- 2_! ~! - Á-ec_n ~ J+kA
--Jo L QJ ~ R:! ecú =- K. = Q.L
-------·~-----···~~-- ~.... ., ____ , __ -· ... ····,
'Jo:::: A C eln- '-lt_)
)"(IQ.:::J --Ji._::: ____!i~ V o =-> ~+Q+
c:z..zo I
~(,;,) =- ? bd= l 22/ 1-:C.Ln
~~ ~:c f r/ ""2 k<:t= ó I b,:~ X.tnC.eJ I b.s me.= 2/3 I
'('()c.
b-e. ""' l
'Nlc. ~ +- 1-.s d.& + bJ ( d::cf - d.:;(fl\ + kd (~- Zrn) =O dtz dt ~dt ch_)
~>->roru-b C.J"-.:'>:::::: o ~ rflc;_ 6:2. ><f c..,) 4-- ( bó+ b.d) é>Xf(ó)- bJóXtr.C-:J) +
(b)
k,d LXrCb)-XLr)Cõ)J=o
'fflc...e;'J..Xr +- (b~+ bd)õXf + kdXf = bd 6Xt:o + kd Xtn = (bd6t-kdJXt:V)
C me. 6.2.. + C b.e. + b.:~) ô + kd) xf =- (bd 6 + kd) x t:.n
X pC-.5) = bd 6 + ke~ _ 6 +- õ Xt:nl~ '(()c:. 6.1 + (b.=.+ bd) 6 +- k d 2... 6.1.. -\- 2_ ó 1- ~ o
"-" J tx.!_ +- k :x:.L + k (::c, -x..z.) = F d~~ -
kl\ d \4. + b dx...z. -+- k C:c..2. -:>c_t) =- O dt .l.. dt.2..
\ M ó:J_ XJ.{~) +- 2_ k X.J (,:;,) - k. X:z-{õJ::: F )
L -k X: .. l~)+ M8l. X.2..C!!J)+ b6Xd~)+ k X,_(õ)=o
(CM~.t.. +2..k)XJ.c~) - k.X,_(~)= F
L -K )(_tCs) + ().!\~ + b .:>+ 'K)Xd.!>J =O
\ ( M 6 +- Z.kj:;) \JJ c~)- \<j,:, \);.,C~) ~ F C 2.)
r~ l -kfô 'h c,),_ c M .s +- b +- kfóyv_,_(.,J =o c n
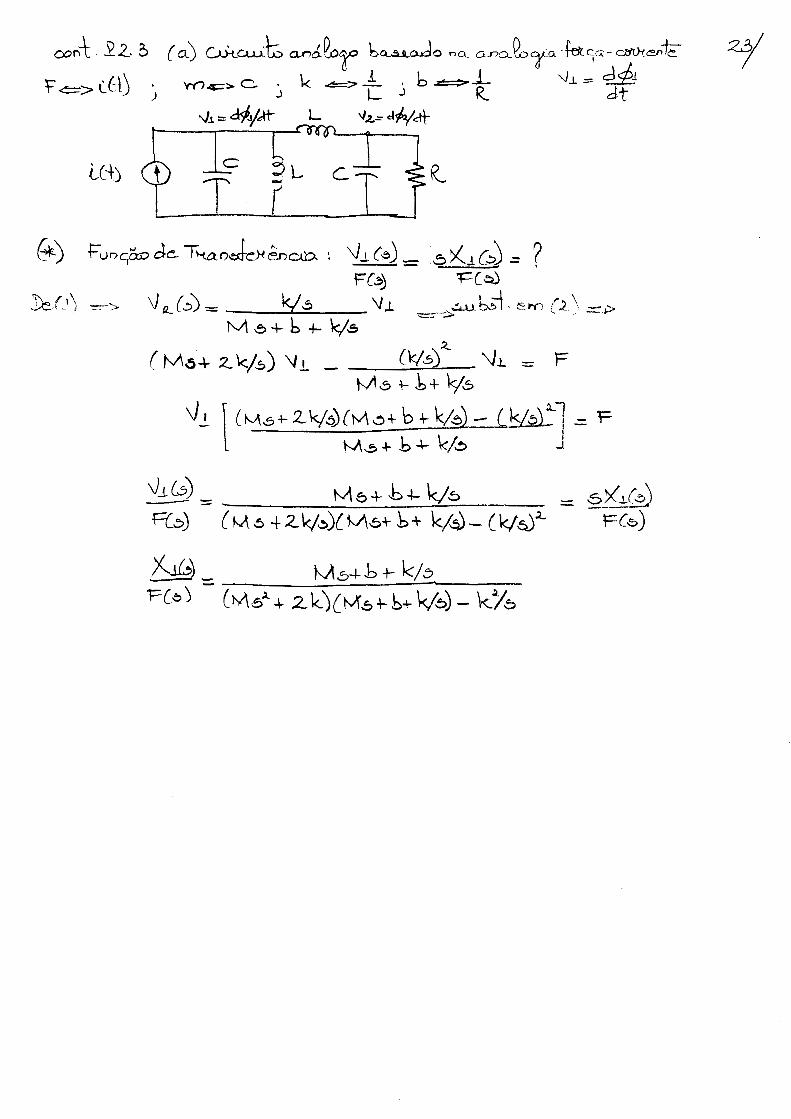
~) ~L.mc;O:o de T~nJeHênClt>. : \).i(~)= 6 >(J. c~) = ? FC~ i=CôJ
'j'\ r 1\ _,_ ' I ( "\ k/ c;.. ' 1 I ...1 ,.. \ ~~ ., _. ·' -·· ..,.... v !2... . .::>) = ~ " .1 =~> ..;._u ~ l · ~.l"'() ( 2 \ =::i>
tv\ 6 + b +- k/6 =<..
{ Mõ+ :z_ k/5 ) \J 1. _ C'(/5) '\11. = F W\6 +- .b+ )yt.s
\) .!.._ l ( M.s t- 2_ k/6) (IV\-:>+ b +- K/6) - (!</õJ ~-, = F
""'~ + b 4- k/!> ...1
~~= Mõ+b~Võ ~) (M~ +Z.k/~)[Mõ+ b+ k/~- (k/õ)J..
)(J.C,) _ M.s+b +- k;,:,
'F[õ) - l~õ.t + Z k)(M6 +- b+ k/õ)- \'<-}'ó
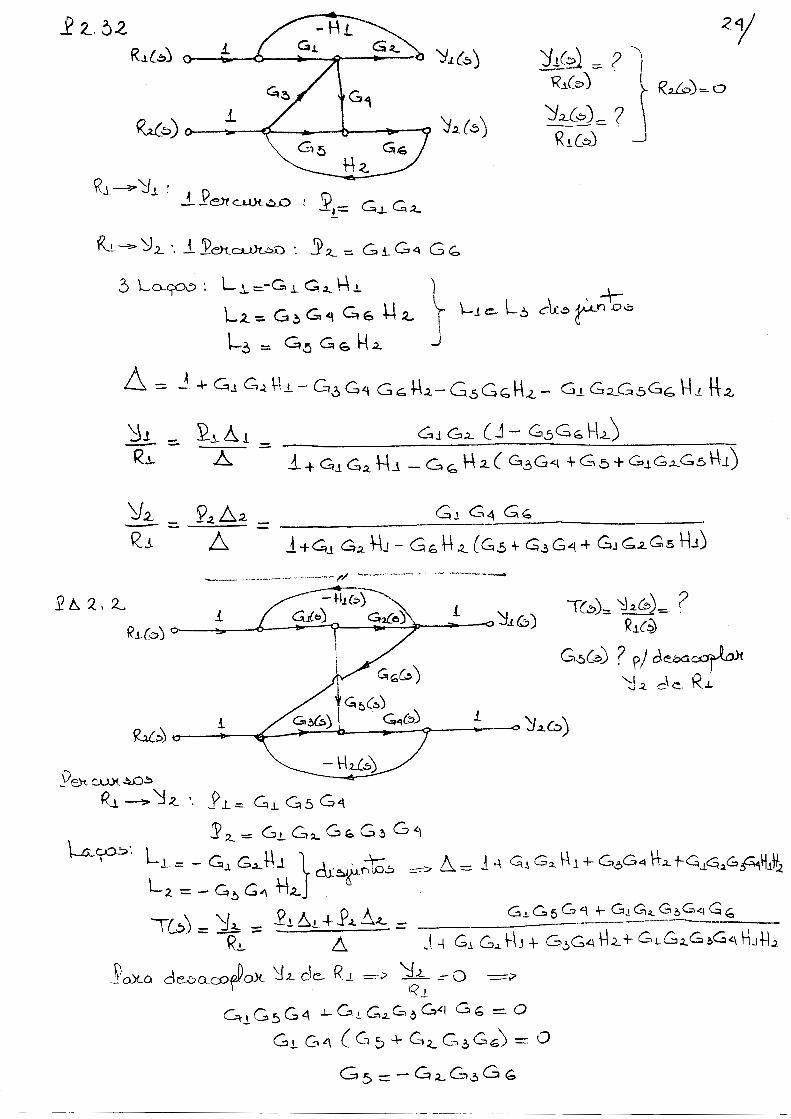
ÇZ.J._-~ ~.i : ~ Ç> --e>tc..uJt~D : ?i_ G..L. G~
lZt--:;,. 2-J 2- ·. 1 'i> e>LcuJL..e;,ü ·. _1l :z.. =- G 1.. G "'~ G ~
3 LO-CfO'-' : L l. =--G j_ G .2.. H l. )
L~-= G ~ G (\ G G .w .t. ~ \-J e- L6
l.~::G~GG\-{-' j
~ = J+G..tG~tl.t-G"G~ GGt-\.l.-G5GçJ\.<_- G_!G;t_G5Gc;.\-l..tH.<.
~l ::. :2_~~ 1 = G.1G~ (J- G5GbH.L)
R..t. A .i+ G..t G~ \-4.1- G b t-\ .2..( G,3G<I + G ó + G.lG.LG5 \-\1)
TG):: ~2.Ce>)= ? R1C~
G5éõ) ? p) Óe,::.a+
'::\.2. c\ ~- R J..
2 0t CI...I.X~~ R1---> ':j~ ·. i>.L-= G.L G5 GL\
la.. c.o;:;. ·. I
.:2 :L = G.L G :1... G G G ~ G ~
L 1 = - G-1 G.1.. t\..1 L ÓJ:~j;;..':.> =-> L= l .-+ c;.!_ G!l.. \--\1 + GoG"' \-t.._ +-~..t~.:LG~c:;'\~1*2 L:z. = - ~_, G"' -\-b .. J
,,.J Ç> " . () À G.!. G 5 G .q -1- G.1G.2.. G~G.q G G \[~) = ~ ::: -.l ~l -+·..r .2.. ~.L = ,-.
. R.!- t6. J~ G.tG .... HJ+G_)GLitl)_+-l=lt-G.2...GÕG~,t-Lt-b
]oXo de.õoc:o Jo.>t ~L de. RJ. =;;. ~.L -=-O =Y> F- q.l
e4J. G 5 G 4. -L- G .L G.2. G õ G-'1 G G ==- O
Gl. C.., L\ (c, ó + G<- G~ GG) := o
G5-::::-G:t.G~GG