avalia˘c~ao dos modelos de cores rgb e hsv na segmenta˘c ... · em cartas topogr a cas ... a474a...
TRANSCRIPT
Dorirley Rodrigo Alves
Avaliacao dos Modelos de Cores RGB e
HSV na segmentacao de Curvas de Nıvel
em Cartas Topograficas Coloridas
Belo Horizonte
Maio de 2010
Dorirley Rodrigo Alves
Avaliacao dos Modelos de Cores RGB e
HSV na segmentacao de Curvas de Nıvel
em Cartas Topograficas Coloridas
Dissertacao apresentada ao programa dePos-Graduacao em Engenharia Eletrica daPontifıcia Universidade Catolica de MinasGerais, como requisito parcial para obtencaodo tıtulo de Mestre em Engenharia Eletrica
Orientador:
Prof. Alexei Manso Correa Machado, D.Sc.
Pontifıcia Universidade Catolica de Minas GeraisPrograma de Pos-graduacao em Engenharia Eletrica
Belo Horizonte
Maio de 2010
FICHA CATALOGRÁFICA Elaborada pela Biblioteca da Pontifícia Universidade Católica de Minas Gerais
Alves, Dorirley Rodrigo A474a Avaliação dos modelos de cores RGB e HSV na segmentação de curvas de
nível em cartas topográficas coloridas. / Dorirley Rodrigo Alves. Belo Horizonte, 2010.
65f. : il. Orientador: Alexei Manso Correa Machado Dissertação (Mestrado) – Pontifícia Universidade Católica de Minas Gerais. Programa de Pós-Graduação em Engenharia Elétrica. 1. Processamento de Imagens. 2. Mapas Topográficos. I. Machado, Alexei
Manso Correa. II. Pontifícia Universidade Católica de Minas Gerais. Programa de Pós-Graduação em Engenharia Elétrica. III. Título.
CDU:681.3

Dorirley Rodrigo Alves
Avaliacao dos Modelos de Cores RGB e HSV na segmentacao de Curvas
de Nıvel em Cartas Topograficas Coloridas
Dissertacao de Mestrado apresentada no Programa de Pos-graduacao em Engenharia
Eletrica, da Pontifıcia Universidade Catolica de Minas Gerais, como parte dos requisitos
para obtencao do grau de Mestre em Engenharia Eletrica. Belo Horizonte, 03 de maio de
2010.
Prof. Dr. Alexei Manso Correa Machado – PUC MinasOrientador
Profa. Dra. Flavia Magalhaes Freitas Ferreira – PUCMinas
Prof. Dr. Clodoveu Augusto Davis Junior – UFMG

Dedicatoria
Durante a minha infancia, me recordo que sempre minha mae manifestava seu desejo
em ter uma mesa redonda. Naquela epoca, a famılia pobre, com dinheiro minguado e
almondegas de soja contadas para o mes seguinte, a desejada mesa era um sonho de
consumo muito distante para ser alcancado.
Um dia, lembro-me bem, brincando no chao da cozinha com meu carrinho sem ro-
das herdado de um dos vizinhos, assustei-me com ela. De serrote em punho tendo na
outra mao um pedaco de barbante amarrado a um prego e do outro lado um lapis, ela
mirava a mesa velha, retangular, que foi montada pelo meu pai sobre um tronco seco
envernizado, procurando seu centro. Ao encontra-lo, cravou-lhe o prego e esticando o
barbante, comecou a desenhar o que me parecia um grande cırculo. De lıngua entre os
dentes, comecou a serra-la. Eu, espantado com a destruicao, assistia a tudo absoluta-
mente mudo. No almoco daquele dia, sentados a nova mesa, eu e minha irma vıamos
minha mae com um brilho radiante nos olhos, deliciando mais uma vez, a almondega com
arroz e feijao.
Hoje, percebo o valor dos sonhos realizados. Consigo compreender a razao do brilho
radiante nos olhos de uma intrepida mulher que, sem escolaridade, geometricamente,
conseguiu materializar uma grande parte dos seus sonhos. Aprendi com ela o bom sabor
das simples coisas. Aprendi com ela que basta perseguir incansavelmente seus sonhos
para que eles se tornem realidade. E isso, so depende da gente.
Dedico a realizacao deste sonho a voce minha mae, por me ensinar que em uma mesa
redonda pode haver muito mais que uma simples bancada para o almoco, pode haver
conquistas.

Agradecimento
Ao Laboratorio de Cartografia do Departamento de Geografia da PUC Minas e ao
Centro de Geoprocessamento das Paroquias da Arquidiocese de Belo Horizonte - CGPAR,
por cederem, sempre de forma gentil, os laboratorios e sobretudo o saber de seus tecnicos
para a realizacao das minhas pesquisas e experiencias.
A todos os Professores, Funcionarios e colegas do PPGEE por contribuir, e muito,
para minha formacao.
Ao meu orientador e agora amigo, Alexei Manso, por seu inigualavel apoio e inabalavel
confianca, sendo, portanto, uma das forcas propulsoras para minha pos-graduacao. A
voce Alexei, minha eterna gratidao. Se hoje sou Mestre, voce sera meu eterno Mestre dos
Magos.
Aos meus grandes amigos e socios Edgard e Bertelli por me ajudarem incondicional-
mente. A paciencia de voces e um modelo de hombridade.
A minha grande famılia, da Cidade Nova a Tres Rios, sogro, sogra, cunhadas, con-
cunhados e maravilhosos sobrinhos que nunca mediram esforcos para me apoiar, ajudar,
auxiliar e socorrer, deixando-me convicto que todas essas acoes podem ser definidas com
uma unica palavra: amor. Muito obrigado por tudo.
A minha irma Dorian e meu sobrinho Gabriel, por entenderem as minhas ausencias e
mesmo assim, me deixar sempre presente em seus coracoes.
A minha esposa Claudia, por sua abdicacao, paciencia e seu incontestavel amor. Se
hoje cheguei aqui, ela e a maior responsavel por este feito, pois sempre acreditou mais
em mim do que eu mesmo. Voce Claudia, e o meu maior orgulho, minha grande alegria,
simplesmente, meu porto seguro;
Finalmente, aos meus pais, por ser a base do que sou e a quem muito devo e sobretudo
a Deus, por sempre me dar mais do que peco, mostrando sua gigante generosidade.
Resumo
Esta dissertacao apresenta uma avaliacao do comportamento dos modelos de cores
RGB e HSV na segmentacao de curvas de nıvel em cartas topograficas coloridas. Esse
processo de segmentacao nao e uma tarefa trivial devido a sobreposicao ou juncao de
variados geo-objetos em uma mesma posicao do documento cartografico, alem da pre-
senca do aliasing e falsas cores geradas pelo processo de digitalizacao. O objetivo desta
avaliacao e identificar os impactos causados pelo uso dos dois modelos em diferentes cartas
topograficas. Primeiro, as cartas foram classificadas de acordo com a concentracao dos
geo-objetos ao longo do documento cartografico e de acordo com a firmeza da cor das
curvas de nıvel. Depois, as curvas de nıvel foram segmentadas utilizando os diferentes
modelos de cores. Finalmente, foi realizada uma operacao logica entre as imagens segmen-
tadas e uma imagem mestre com o mesmo conteudo, porem vetorizada, a fim de identificar
o volume preservado do geo-objeto apos a operacao. Os resultados finais apresentam uma
dependencia entre as classificacoes das cartas e os modelos de cores utilizados.
Palavras-chave: Processamento de imagem, Sistema de Informacao Geografica (SIG),
segmentacao de mapas, extracao de curvas de nivel em cartas topograficas.

Abstract
This thesis presents an evaluation of the behavior of the RGB and HSV color models in
the segmentation of contour lines in color topographical maps. Segmentation is a difficult
process, since contour lines overlap or intersect with other information, and aliasing and
false colors may be induced by the scanning process. The objective of this evaluation
is to identify the impacts caused by the use of color models in different topographical
maps. The maps are classified based on the concentration of geo-objects throughout the
cartographic document and in accordance with the characteristics of color and form of the
contour lines. Later, the contour lines are segmented using different color models. Finally,
a logical operation between the segmented images is carried through and an image master
and contend content the same, however vectoring the same in order to after identify to the
preserved volume of the geo-object the operation. The final results present a dependence
between map classification and the color models under investigation.
Keywords: Image Processing, Geographic Information System (GIS), map segmen-
tation, topographic map contour line extraction.
Lista de Figuras
1 Parte de uma carta topografica com a identificacao de alguns geo-objetos. p. 13
2 Problemas causados pelo processo de digitalizacao e do proprio conteudo
da carta. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 16
3 Ilustracoes contendo exemplos de caracterısticas que determinam a clas-
sificacao de qualidade de uma carta topografica. . . . . . . . . . . . . . p. 21
4 Principais caracterısticas das curvas de nıvel. . . . . . . . . . . . . . . . p. 22
5 Exemplos de caracterısticas das curvas de nıvel. . . . . . . . . . . . . . p. 23
6 Vetorizacao manual usando o AutoCAD Map 3D. . . . . . . . . . . . . p. 23
7 Ilustracoes destacando o cruzamento de um geo-objeto curva de nıvel
com o geo-objeto hidrografia. . . . . . . . . . . . . . . . . . . . . . . . p. 25
8 Simulacao de um processo de vetorizacao semiautomatica que desvia-se
do seu curso correto ao encontrar um cruzamento de linhas. . . . . . . p. 25
9 Representacao do espaco de cores do Modelo RGB. . . . . . . . . . . . p. 28
10 Representacao do espaco de cores do Modelo HSV. . . . . . . . . . . . p. 29
11 Classificacao dos artigos de acordo com as caracterısticas dos geo-objetos
utilizados e os modelos de cores aplicados na dissertacao. . . . . . . . . p. 32
12 Exemplo do formato da distribuicao das cores que representam as curvas
de nıvel no espaco vetorial que corresponde ao espaco de cores do modelo
RGB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 40
13 Diagrama contendo as etapas necessarias para a realizacao da coleta de
dados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 43
14 Interface da aplicacao implementada para a segmentacao utilizando o
modelo RGB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 48

15 Interface implementada para execucao do processo de segmentacao uti-
lizando o modelo de cor HSV. . . . . . . . . . . . . . . . . . . . . . . . p. 49
16 Interface da aplicacao implementada para realizacao da operacao logica
AND entre uma imagem contendo o geo-objeto curva de nıvel segmentado
e sua respectiva imagem mestre contendo o mesmo geo-objeto vetorizado p. 50
17 Grafico contendo o comportamento da estabilidade das medias ao longo
do processo de segmentacao das cartas topograficas coloridas. . . . . . p. 55
18 Grafico contendo o comportamento das Medias Harmonicas ao longo do
processo de segmentacao das cartas topograficas coloridas. . . . . . . . p. 57
19 Grafico demonstrando o comportamento dos Modelos RGB e HSV no
processo de segmentacao das curvas de nıvel em uma determinada carta
topografica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 61
20 Resultados obtidos com processo de segmentacao utilizando o Modelo de
Cor RGB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 62
Lista de Tabelas
1 Caracterısticas basicas das imagens das cartas topograficas coloridas utilizadas
no experimento. Apesar de diferentes medidas e escalas, todas possuem a
mesma resolucao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 44
2 Resultados alcancados ao final das Etapas 2 e 3, classificacao das cartas to-
pografica e geo-objetos respectivamente. . . . . . . . . . . . . . . . . . . . p. 47
3 Resultados obtidos com o uso do Metodo proposto na Secao 5.6. . . . . . . p. 52
4 Classificacao do geo-objeto curva de nıvel e respectivos resultados acerca
da precisao, acertividade e media harmonica advindas de cada modelo
de cor utilzado no processo de segmentacao. . . . . . . . . . . . . . . . p. 56

Sumario
1 Introducao p. 12
1.1 Descricao do problema . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 14
1.2 Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 17
1.3 Justificativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 17
2 Cartas Topograficas: classificacao e formas de vetorizacao p. 20
2.1 Classificacao das cartas topograficas pelo conjunto de elementos que as
compoem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 20
2.2 Caracterısticas especıficas do geo-objeto curva de nıvel . . . . . . . . . p. 21
2.3 Formas de vetorizacao em cartas topograficas . . . . . . . . . . . . . . p. 22
3 Modelos de Cores p. 26
3.1 Modelo RGB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 27
3.2 Modelo HSV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 28
4 Revisao da Literatura p. 31
4.1 Segmentacao de geo-objetos em documentos cartograficos . . . . . . . . p. 31
4.1.1 O uso do modelo de cor RGB . . . . . . . . . . . . . . . . . . . p. 32
4.1.2 O uso do modelo de cor HSV . . . . . . . . . . . . . . . . . . . p. 34
5 Metodos p. 35
5.1 Relacao do problema da pesquisa com as hipoteses levantadas . . . . . p. 35
5.2 Hipotese, questao-chave e suas questoes-teste . . . . . . . . . . . . . . . p. 36
Hipotese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 36

Questao-chave da Hipotese . . . . . . . . . . . . . . . . . . . . . p. 36
Questoes-teste da Hipotese . . . . . . . . . . . . . . . . . . . . . p. 37
5.3 Descricao da amostra . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 37
5.4 Instrumentos de medida . . . . . . . . . . . . . . . . . . . . . . . . . . p. 37
5.5 Implementacao do processo de segmentacao . . . . . . . . . . . . . . . p. 38
5.5.1 Segmentacao das curvas de nıvel utilizando o espaco de cor do
modelo RGB . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 38
5.5.2 Segmentacao das curvas de nıvel utilizando o espaco de cor do
modelo HSV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 41
5.6 Coleta dos dados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 42
6 Apresentacao dos Resultados p. 46
6.1 Apresentacao dos resultados obtidos . . . . . . . . . . . . . . . . . . . . p. 46
7 Interpretacao dos Resultados, Conclusoes e Recomendacoes p. 53
7.1 Avaliacao das questoes-teste da hipotese . . . . . . . . . . . . . . . . . p. 53
Hipotese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 53
Questao chave . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 53
Questao-teste 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 54
Questao-teste 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 54
Questao-teste 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 58
7.2 Consideracoes Finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 60
7.3 Limitacoes do metodo e recomendacoes . . . . . . . . . . . . . . . . . . p. 63
Referencias p. 64

12
1 Introducao
De um modo geral, desde a epoca mais remota ate hoje, a construcao de mapas e
a maneira mais comum para auxiliar a analise de problemas que envolvem o tratamento
de informacoes espaciais. Na Geografia, mapas ou cartas topograficas1 sao documentos
geograficos utilizados para a realizacao de analises espaciais, e um dado geografico contido
nesses documentos pode ser estudado segundo duas visoes complementares: o modelo de
campos e o modelo de objetos. Sobre o modelo de campos ou geo-campos, esse dado
corresponde a grandezas distribuıdas espacialmente, como tipo de solo, topografia e teor
de minerais. Quanto ao modelo de objetos ou geo-objetos, esse dado representa elementos
individualizaveis e tem identificacao com elementos do mundo real, como rios, curvas de
nıvel, estradas ou postes numa rede eletrica. Na ilustracao da Fig. 1 sao apresentados
alguns exemplos de geo-objetos.
Atualmente, dados extraıdos de cartas topograficas digitalizadas sao largamente u-
sados a fim de se produzirem informacoes corretas para tomadas de decisoes. Como
exemplo, a partir do processamento dessas cartas e possıvel identificar uma determinada
caracterıstica de um terreno (plano ou montanhoso), ou calcular a maximizacao dos lucros
de uma certa cultura de plantio atrelada a informacoes climaticas em um determinado
perıodo do ano.
Atraves do uso de scanners, mapas ou cartas topograficas impressas em papel (formato
analogico) sao convertidos para o meio digital. Entretanto, para a construcao de um banco
de dados geografico nao basta ter apenas esse arquivo digital, sendo necessaria tambem a
extracao dos dados contidos nesse documento. Portanto, para a construcao desse banco
de dados sao indispensaveis tres etapas dependentes: (a) selecao de elementos a partir de
algum criterio; (b) segmentacao do elemento selecionado e (c) vetorizacao dos geo-campos
e/ou geo-objetos.
A primeira etapa consiste em selecionar um elemento de interesse, como o conjunto
1Carta topografica e uma representacao grafica de uma parte da superfıcie da terra, tal como ela e, edentro de uma precisao matematica, sempre compatıvel com a escala.

13
Figura 1: Parte de uma carta topografica com a identificacao de alguns geo-objetos que acompoem. FONTE: (CARTOGRAFIA., 1979)

14
de todas as curvas de nıvel, rios ou estradas. Quanto a segunda, segmentar consiste em
delimitar um ou mais elementos presentes na imagem a partir da identificacao e selecao
correta de sua localizacao, topologia e forma. Por exemplo, segmentar as curvas de nıvel
em uma carta topografica significa extrair todos os geo-objetos desse elemento ao longo da
imagem por meio de sua cor e forma do tracado, permitindo com isso facilitar o processo
de vetorizacao. Por fim, vetorizar uma carta topografica consiste em converter todos
os elementos (campos ou objetos) contidos nessa imagem em pontos, linhas, polıgonos
ou conjunto de isolinhas, dependendo das caracterısticas estruturais de cada elemento,
produzindo com isso, um arquivo vetorial. Esse arquivo contera os mesmos geo-campos ou
geo-objetos, porem, representados agora por vetores. Esse processo tambem e conhecido
na literatura por conversao raster to vector ou vetorizacao.
1.1 Descricao do problema
Embora mapas ou cartas topograficas possuam uma grande quantidade de geo-objetos,
pois cada um deles deve ser representado sob formas diferentes, visto que possuem car-
acterısticas visuais diferentes, a etapa de vetorizacao e realizada muitas vezes de forma
manual, devido a dificuldade em segmenta-los. Segmentar geo-objetos em uma carta to-
pografica nao e uma tarefa trivial devido a enorme variedade de tons de cor e forma
de tracado que uma unica classe de elementos, por exemplo uma curva de nıvel, pode
possuir. Isso faz com que esse procedimento de conversao manual seja muito comum,
apesar do processo nao ser uma tarefa tao simples, uma vez que exige o uso de sistemas
CAD2 especıficos para reproduzir uma representacao fiel das informacoes desejadas. Nao
obstante, a maioria dos sistemas CAD existentes nao estao preparados para tratar todos
os elementos presentes em uma carta topografica ou um mapa. Por exemplo, os SIG
(Sistemas de Informacao Geografica) comerciais nao sao capazes de armazenar e utilizar
multiplas representacoes para cada objeto geografico. Essas multiplas representacoes sao
necessarias para que usuarios e sistemas que manipulam o espaco de formas diferentes
possam utilizar o mesmo banco de dados geograficos. Essas limitacoes sao causadas pelas
diferencas entre as informacoes que o CAD e capaz de produzir e aquelas corretas que sao
necessarias para um eficiente funcionamento do SIG. Ou seja, o CAD tem que ter a ca-
pacidade de unir as ferramentas de vetorizacao semiautomatica de imagens com um banco
de dados geograficos do SIG. Entretanto, essa uniao torna os processos mais propensos a
2 CAD - Computer-Aided Design ou (Projeto Auxiliado por Computador). No contexto deste trabalho,Sistemas CAD representam um conjunto de ferramentas que permite automatizar a criacao e manutencaode mapas que contenham volumes muito grandes de dados e abranjam areas geograficas extensas.

15
erros, e quando a correcao desses erros e realizada por procedimentos semiautomaticos, o
processo torna-se lento e custoso. Essa lentidao na digitalizacao das cartas deve-se a falta
de ferramentas especıficas para tratar determinadas representacoes, tais como pontos, lin-
has, polıgonos ou conjuntos de isolinhas, para a representacao de componentes espaciais,
que sao peculiares aos documentos que sao transformados em imagens. Davis:01, Fitz:08,
Joly:03.
Com a crescente utilizacao de documentos geograficos representando a cada dia uma
quantidade maior de elementos do mundo real, o uso da cor tornou-se tao importante
quanto a definicao de novas formas para expressar ou definir esses elementos. Devido ao
grande volume de informacoes que as cartas possuem, e normal que haja fusao ou cruza-
mento de elementos, gerando, consequentemente, erros que inviabilizam a vetorizacao
automatica. No entanto, mesmo havendo alguma interferencia humana a fim de facilitar
a ocorrencia da vetorizacao, essa devera ser altamente especializada devido a variedade de
elementos apresentados nesses documentos geograficos. Portanto, a utilizacao de tecnicas
de segmentacao e muito bem vinda para a criacao de banco de dados geograficos, uma vez
que elas permitem a reducao dos problemas causados pelo uso de CAD, pois ele possui
limitacoes no que diz respeito a forma de representacao, organizacao e armazenamento
desses geo-objetos.
Nos ultimos 40 anos, um razoavel volume de trabalhos foi publicado com o intuito de
elaborar processos que permitam resolver o problema de segmentacao de geo-objetos em
cartas topograficas. Esses processos sao elaborados com o objetivo de criar metodos que
promovam a vetorizacao automatica de variados tipos de geo-objetos independentemente
do tipo da carta topografica utilizada. Essa afirmacao pode ser observada, por exem-
plo, em (COFER; TOU, 1972), (GREENLEE, 1987), (MARCU; ABE, 1995), (POUDEROUX;
SPINELLO, 2007) e (CHIANG et al., 2009). Entretanto, e possıvel perceber que, quando
os pesquisadores tem como objetivo a segmentacao de geo-objetos, todos conseguem re-
sultados de forma satisfatoria, porem, sem alcancar uma segmentacao perfeita. Ou seja,
nao segmentam um determinado geo-objeto de interesse preservando suas caracterısticas
fundamentais, tais como forma e cor, e mantendo a continuidade do tracado do referido
elemento. Nesses resultados, o geo-objeto segmentado ainda necessita passar, inclusive,
por algum processo que o reconstrua para que a vetorizacao seja realizada com sucesso.
Especificamente sobre a extracao de curvas de nıvel em cartas topograficas coloridas,
varios autores buscam uma implementacao eficaz para a remocao dessas curvas. Entre-
tanto, em todos os trabalhos pesquisados, quatro grandes problemas sao apresentados

16
Figura 2: (a) Falsas cores geradas ao longo do geo-objeto curva de nıvel. Esse artefato e causadopelo desalinhamento das lentes instaladas no scanner em relacao aos canais que compoem omodelo de cor RGB que e utilizado para a conversao do documento analogico para digital.A existencia das falsas cores pode ser observada proximo ao geo-objeto curva de nıvel, ondeexistem pixels com coloracao diferente da cor marrom atribuıda ao referido geo-objeto. (b)Aliasing gerado no entorno do geo-objeto curva de nıvel. Os dois problemas anteriores ocorremem funcao do processo de conversao do documento analogico para o digital. (c) Fusao de dois geo-objetos curvas de nıvel e (d) Sobreposicao de geo-objetos malha de coordenadas (tons de preto)com curvas de nıvel (tons de marrom) e hidrografia (tons de azul) sao problemas decorrentes doconteudo da carta topografica.
como os maiores entraves na busca de uma segmentacao perfeita. Dois deles sao causados
pelo processo de digitalizacao da carta, que sao as falsas cores e o aliasing (observe-as re-
spectivamente nas ilustracoes (a) e (b) da Fig. 2). Os outros dois desafios sao provenientes
do proprio conteudo da carta topografica utilizada: as fusoes de diferentes geo-objetos de
uma mesma classe (ilustracao (c) da Fig. 2) ou as sobreposicoes de varios geo-objetos de
classes diferentes (curva de nıvel, mallha de coordenada e hidrografia conforme a ilustracao
(d) da Fig. 2).
A existencia de falsas cores ocorre quando sao apresentadas cores diferentes da com-
binacao daquelas que deveriam ser percebidas como corretas para representar um deter-
minado elemento. Observe a ilustracao (a) da Fig. 2. Nessa ilustracao existem cores

17
diferentes da cor marrom que representa a curva de nıvel ao longo do elemento.
O aliasing e um efeito indesejado que resulta na degradacao da qualidade da imagem,
manifestando-se, como degraus que sao criados ao se desenhar uma reta em diagonal em
uma imagem, conforme ilustracao (b) da Fig. 2. Este efeito pode ser notado tambem
nas demais ilustracoes da mesma Figura. Isso e causado pela distorcao que ocorre num
sinal amostrado quando a taxa de amostragem nao respeita a taxa mınima (Teorema de
Nyquist), impedindo a correta recuperacao do sinal (JAIN, 1989, p. 87).
A fusao de dois ou mais elementos e outro problema. Normalmente, esses sao sep-
arados pelas cores que representam o fundo do documento. Entretanto, quando esses
elementos estao muito proximos, a baixa taxa de amostragem no processo de digitali-
zacao pode uni-los, dificultando a segmentacao, conforme ilustracao (b) da Fig. 2.
A intersecao ou sobreposicao das curvas de nıvel com outros elementos presentes
no documento topografico e inevitavel em qualquer carta topografica. Esse documento
representa um cenario do mundo real, contendo variados elementos que podem ser repre-
sentados por inumeros geo-objetos distintos em uma mesma posicao geografica, tais como
estradas sobre rios, estradas entre as vegetacoes, rios sobre curvas de nıvel ou malha de
coordenadas sobre qualquer elemento presente na carta, conforme pode ser observado na
ilustracao (c) da Fig. 2.
1.2 Objetivo
O objetivo deste estudo e analisar o impacto dos modelos de cor RGB e HSV no pro-
cesso de segmentacao do geo-objeto curva de nıvel, utilizando varias cartas topograficas
coloridas digitalizadas. A implementacao desse processo servira para verificar qual dos
modelos proporciona melhor resultado no processo de segmentacao, ou seja, qual o mod-
elo e capaz de segmentar o referido geo-objeto, mantendo o maior conjunto possıvel de
suas caracterısticas estruturais (cor, forma e continuidade do tracado) e permitindo uma
vetorizacao menos dispendiosa.
1.3 Justificativa
Ao longo da literatura pesquisada, os autores tem uma preocupacao em escolher um
modelo de cor que apresente, em seu espaco de cores, a identificacao correta dos valores
das cores do geo-objeto de interesse ou sua posicao em coordenadas, facilitando com

18
isso a segmentacao, a fim de solucionar os quatro problemas apresentados anteriormente.
Ademais, considerando que a partir dos referidos problemas os autores optam por dois
tipos de modelos de cores para a realizacao dessa segmentacao, o modelo RGB e o modelo
HSV, e possıvel perceber que em um processo de segmentacao de um determinado geo-
objeto, os modelos de cores utilizados como base para identifica-los nao permitem a rea-
lizacao de uma segmentacao perfeita sendo sempre necessaria a aplicacao de um processo
de reconstrucao sobre esse geo-objeto.
Nao obstante, em laboratorios de cartografia, estejam eles instalados em ambientes
academicos ou comerciais, tornou-se imprescindıvel o uso da ferramenta CAD devido as
facilidades de georreferenciar os dados contidos nos documentos digitais de forma semi-
automatica para a construcao de bancos de dados geograficos. Especificamente sobre a
vetorizacao das curvas de nıvel em cartas topograficas coloridas, se o processo de seg-
mentacao produzir uma imagem basica referente a essa carta contendo somente as curvas,
a funcao de vetorizacao semiautomatica sera executada em um tempo menor se comparado
com o processo que utiliza a carta original. Essa reducao e devido a facilidade do usuario
tomar a decisao do que deve ser vetorizado. Todavia, mesmo que, durante o processo de
segmentacao, as curvas de nıvel venham acompanhadas de outros geo-objetos que foram
segmentados em conjunto, devido a enorme presenca de caracterısticas semelhantes, tais
como cores e formas ou por causa da sobreposicao dos variados elementos existentes, o
processo ainda e valido sob o ponto de vista da reducao do tempo de vetorizacao.
Alem dessas questoes, a avaliacao do uso dos modelos de cores no processo de seg-
mentacao de elementos contidos em imagens ainda permanece um problema em aberto.
Ou seja, ainda nao existe uma receita para a escolha do modelo ideal ou do melhor
modelo que favoreca a producao de resultados no processo de segmentacao. Portanto, a
compreensao do papel desses modelos de cores, em variados problemas que necessitam da
aplicacao de tecnicas de segmentacao, contribui para a tomada de decisao na escolha de
qual deles pode ser utilizado em diferentes problemas.
Este trabalho esta organizado da seguinte forma. Nos Capıtulos 2 e 3, sao apresentados
os conceitos necessarios para a compreensao deste trabalho. O Capıtulo 4 apresenta uma
revisao da literatura por meio do levantamento do que ja foi publicado sobre o tema.
No Capıtulo 5, e apresentado o metodo que sera utilizado nesta dissertacao a partir da
intersecao dos conceitos teoricos apresentados neste trabalho com os problemas levantados
como objeto de discussao. No Capıtulo 6, sao apresentados os resultados alcancados com
o metodo e no Capıtulo 7, as conclusoes finais sobre todo o trabalho realizado, alem dos

19
trabalhos que poderao ser desenvolvidos futuramente.

20
2 Cartas Topograficas:classificacao e formas devetorizacao
2.1 Classificacao das cartas topograficas pelo conjunto
de elementos que as compoem
Uma analise paisagıstica pode ser realizada de duas formas: (a) quando o observador
aprecia o alcance e a magnitude das vistas panoramicas observadas de diferentes altitudes
da area, ou (b) por meio da qualidade visual do conjunto de topografia, vegetacao, agua,
solos e rochas que compoem os recursos fısicos da propria area Griffith:83. Na primeira
forma, o alcance e a magnitude de vistas panoramicas dependem, principalmente, da
posicao do observador e, portanto, podem-se distinguir tres categorias de posicao: (a)
posicao inferior, quando o observador encontra-se em um plano inferior de observacao, em
contraste com o restante das regioes adjacentes; (b) posicao normal, quando o observador
encontra-se no mesmo plano de observacao dos elementos da paisagem a sua frente e; (c)
posicao superior, quando o observador encontra-se acima da maior parte da paisagem a
sua frente. Na segunda forma, a analise visual e dada pelos recursos fısicos da area de
interesse, ignorando-se as condicoes panoramicas, considerando somente a qualidade do
conjunto dos elementos que compoem a regiao de interesse, onde topografia, vegetacao,
agua, solos e rochas, quando combinados em uma determinada area dessa regiao, podem
ser classificados pela densidade do contraste em virtude da variedade de elementos. Ou
seja, a densidade do contraste existente em uma determinada quadrıcula consiste na
existencia de diversos elementos de classes distintas e/ou de numerosos geo-objetos de
um mesmo elemento em uma mesma area. Portanto, uma area pode ser classificada
como de baixo, medio ou alto contraste de elementos/geo-objetos), conforme os exemplos
ilustrados na Fig. 3.

21
(a) Baixo contraste degeo-objetos de umamesma classe.
(b) Medio contrastede geo-objetos de umamesma classe.
(c) Alto contraste de geo-objetos de uma mesmaclasse.
(d) Baixo contraste degeo-objetos de diferentesclasses.
(e) Medio contraste degeo-objetos de diferentesclasses.
(f) Alto contraste degeo-objetos de diferentesclasses.
Figura 3: Ilustracoes contendo exemplos de caracterısticas que determinam a classificacao dequalidade atribuıda a uma carta topografica apos o processo de avaliacao.Observe que a densi-dade de elementos pode ser determinada pela quantidade de varios geo-objetos de uma mesmaclasse, como por exemplo as ilustracoes (a), (b) e (c) ou pela quantidade de varios geo-objetosde classes distintas conforme as ilustracoes (d), (e) e (f)
2.2 Caracterısticas especıficas do geo-objeto curva de
nıvel
Curva de nıvel e o nome usado para designar uma linha imaginaria que liga pontos que
possuem a mesma altitude. E um metodo, tradicional para representar o relevo terrestre,
permitindo ao usuario ter um valor aproximado da altitude em qualquer parte da carta
IBGE:10. Uma curva de nıvel e uma curva altimetrica ou linha isoıpsa (liga pontos de
mesma altitude).
A partir da visualizacao de uma curva de nıvel e possıvel identificar se o relevo de uma
determinada area e acidentado, plano, montanhoso, ıngreme etc. Diante dessa afirmacao,
percebe-se que a configuracao das linhas e determinada pelas caracterısticas do relevo da
area mapeada.
As principais caracterısticas das curvas, apresentadas a seguir, podem ser observadas
na ilustracao da Fig. 4.

22
1. As curvas de nıvel tendem a ser quase que paralelas (alinhadas) entre si. Entretanto,
isso normalmente acontece quando o declive do terreno e mais constante.
2. Todos os pontos de uma curva de nıvel se encontram na mesma elevacao.
3. Cada curva de nıvel fecha-se sempre sobre si mesma. No entanto, quando isso nao
acontece e porque o fechamento desta curva se encontra em outra folha topografica.
4. As curvas de nıvel nunca se cruzam, podendo se tocar em saltos d’agua ou despe-
nhadeiros.
Figura 4: As curvas de nıvel sao desenhadas em intervalos regulares, que sao chamados deequidistancia das curvas de nıvel. Na figura acima, a ilustracao possui uma escala 1:50.000, aequidistancia e de 20 metros, e as curvas relacionadas a valores multiplos de 100 sao chamadasde curvas-ındice ou mestra. Estas curvas sao sempre representadas por linhas de cor mais fortepara facilitar a leitura e compreensao da topografia. FONTE: adaptado de (OLIVEIRA, 1993)
Em cartas topograficas digitalizadas, a consistencia da cor que representa as curvas
tende a variar devido ao processo de conversao raster to vector. Ou seja, sua coloracao
pode ser mais forte, sendo com isso mais nıtida, nao tao forte, mas ainda permitindo uma
facil visualizacao e quando mais fraca, perde-se a nitidez em virtude da concentracao de
outros elementos proximos a ela. As ilustracoes da Fig. 5 apresentam essas caracterısticas.
2.3 Formas de vetorizacao em cartas topograficas
Em alguns sistemas CAD comerciais dedicados a geografia, como AutoCAD Map
3DTMe ArcGISTM, a representacao vetorial de um geo-objeto presente em cartas to-

23
(a) Cor mais fraca difi-culta a visualizacao dacurva de nıvel.
(b) Cor mediana permiteuma boa visualizacao dacurva de nıvel.
(c) Cor acentuada facilitaa visualizacao da curva denıvel.
Figura 5: Ilustracoes contendo exemplos de caracterısticas que determinam a facilidade devisualizacao das curvas de nıvel em uma carta topografica digitalizada.
pograficas ou mapas em formato de imagem, pode ser criada atraves de vetorizacao manual
ou entao da vetorizacao semiautomatica.
Em sistemas que possibilitam a vetorizacao manual, como o AutoCAD Map 3DTM,
existem ferramentas que propiciam ao usuario a criacao de uma linha sobre o geo-objeto
selecionado respeitando suas formas (curvas) e seu trajeto. Normalmente, para a criacao
dessa linha, e necessario o uso de “zoom” para a exata visualizacao do geo-objeto, possi-
bilitando assim uma vetorizacao mais segura e diminuindo o risco de erros. Na Fig. 6 e
mostrado um exemplo de vetorizacao de hidrografia representada por uma linha em azul
e curvas de nıvel, em vermelho, realizadas no AutoCAD Map 3DTM.
Figura 6: Vetorizacao manual usando o AutoCAD Map 3D
24
Para (DAVIS Jr., 2001), essa vetorizacao tem se tornado um processo interessante do
ponto de vista economico, devido a diminuicao do custo dos equipamentos e softwares.
Porem, alem de ser propensa a erros, e dispendiosa, pois aumenta drasticamente o tempo
de execucao devido a interferencia humana, impossibilitando assim uma rapida conclusao
do processo.
Normalmente, na vetorizacao semiautomatica, o usuario inicia o processo de vetor-
izacao no CAD adotando os seguintes passos: (1) a marcacao de dois pontos extremos no
geo-objeto desejado, sendo um no inıcio e o outro no final, (2) a execucao do comando
que inicia o processo de vetorizacao, interpretando, por meio da coloracao de seus pixels,
os seus pares de coordenadas espaciais ate encontrar o ponto final. O sucesso dessa ve-
torizacao esta diretamente associado a existencia de padroes bem definidos com relacao
a distribuicao das componentes de cor que formam uma imagem. Um CAD que vetoriza
de forma semiautomatica um geo-objeto em uma imagem em preto e branco nao o faz de
maneira eficiente em uma imagem em nıveis de cinza ou colorida devido a variedade de
cores que representam um mesmo geo-objeto.
Alguns sistemas, como o AutoCAD Map 3DTMou o ArcGISTM, possuem operadores
que propiciam uma vetorizacao de forma semiautomatica de um geo-objeto selecionado,
desde que a imagem possua apenas duas cores. Isso significa que o geo-objeto que esta
sendo vetorizado possui uma unica cor em toda sua extensao. Porem, mesmo possuindo
uma unica cor, pode ocorrer o problema de sobreposicao de geo-objetos causados pela
diversidade de informacoes apresentadas (conforme a ilustracao (a) da Fig. 7). Nesse
caso, o operador que gera a linha para representar o geo-objeto por meio da vetorizacao
nao conseguira determinar qual geo-objeto realmente devera vetorizar, pois nomes, valores
de cotas, linhas representando a malha de coordenadas, curvas de nıvel, hidrografia, enfim
todos os geo-objetos fundem-se formando um unico elemento.
Em imagens em nıveis de cinza ou coloridas, nao existe, nos conjuntos de pixels que
representam as linhas, uma cor unica referenciando o geo-objeto curvas de nıvel. Neste
trabalho, essa variacao de cor sera denominada “informacao difusa”. Pode-se observar
tambem que permanece o problema de sobreposicao de geo-objetos causados pela diver-
sidade de informacoes.
Como ja mencionado, conclui-se que a realizacao do processo de vetorizacao semiau-
tomatica em imagens binarias, em nıveis de cinza ou coloridas nao e muito confiavel, pois
como o objeto que esta sendo criado esta sobreposto ao geo-objeto que esta sendo vetori-
zado, ao encontrar uma sobreposicao de outros geo-objetos, conforme as ilustracoes (b) e

25
(a) Parte de uma carta to-pografica em preto e branco.
(b) Parte de uma carta to-pografica em nıveis de cinza.
(c) Parte de uma carta to-pografica colorida.
Figura 7: Parte de uma carta topografica em tres formatos de cores diferentes, destacando ocruzamento de um geo-objeto curva de nıvel com o geo-objeto hidrografia.
(c) da Fig. 7, ele podera seguir uma outra trajetoria que nao seja a do geo-objeto original-
mente selecionado (conforme a ilustracao da Fig. 8), comprometendo assim a eficiencia e
confiabilidade da ferramenta e exigindo um conhecimento bem maior por parte do usuario
para a tomada de decisao quanto a escolha do geo-objeto correto a ser vetorizado.
Figura 8: Simulacao de um processo de vetorizacao semiautomatica que se desvia do seu cursocorreto ao encontrar um cruzamento de linhas.
Isso significa que, tanto em imagens em nıveis de cinza, como nas coloridas, ainda
nao foi possıvel encontrar um CAD que consiga, de maneira eficiente e a baixo custo
financeiro, executar de modo semiautomatico o processo de vetorizacao, quando, durante
a sua execucao, o geo-objeto que foi selecionado apresenta informacoes diferentes com
relacao a coloracao de seus pixels.

26
3 Modelos de Cores
Um modelo de cor e essencialmente uma representacao tridimensional na qual cada
cor e especificada por um ponto no sistema de coordenadas, e o universo de cores que
podem ser reproduzidos por um modelo e chamado de espaco ou gamute de cores. Alem
disso, nao ha um modelo que descreva de forma independente todos os aspectos refentes
as cores e por isso modelos diferentes sao utilizados para ajudar a descrever as diferentes
caracterısticas da cor que sao percebidas pelo ser humano Pedri:08.
Neste trabalho, omitiremos o estudo detalhado da natureza da luz. Esse estudo iria
nos remeter as equacoes de Maxwell do eletromagnetismo, que se fazem necessarias quando
necessitamos entender a interacao da luz com a materia, bem como os fenomenos fısicos da
optica. Entretanto, estamos interessados apenas no estudo da colorimetria, que consiste
em utilizar modelos matematicos para medir a informacao da cor. Todavia, existem varios
modelos de cores que por sua vez podem ser subdivididos em tres tipos de sistemas: (a)
sistemas padrao, (b) sistemas dos dispositivos e (c) sistemas de interface Gomes:94.
(a) Sistemas Padrao : Tem por objetivo estabelecer os sistemas de cor, a fim de facil-
itar a especificacao de cor de forma independente do dispositivo ou das peculiari-
dades de determinadas aplicacoes. Fazem parte desses sistemas o padrao CIE-
RGB e seu sistema complementar CMY e o padrao CIE-XYZ juntamente com
seus varios sistemas uniformes de cor, entre eles os principais modelos, Luv e Lab.
Vale ressaltar que todos esses padroes e seus respectivos modelos foram definidos
pela CIE, Comissao Internacional de Iluminacao, que e o orgao responsavel pela
padronizacao na area da Colorimetria e Fotometria.
(b) Sistemas dos Dispositivos : Sao sistemas de cor associados aos dispositivos graficos
de entrada, processamento e saıda de cor. Fazem parte desses sistemas o Sistema
de Monitor RGB e o complementar Sistema de Monitor CMY, Sistemas de Vıdeo-
componente, Sistema YPbPr (utilizado pela SONY em sua linha BETACAM), Sis-
tema YCbCr (utilizado como padrao em Sistemas de Vıdeo Digital, principalmente

27
nos padroes JPEG, para compressao de imagens, e MPEG, para compressao de
vıdeo) e os Sistemas YIQ e YUV (utilizados nos Sistemas de Vıdeo Composto).
(c) Sistemas de Interface de Cor : Sao sistemas que tem como objetivo facilitar a
especificacao da informacao da cor por parte do usuario. Nesse caso, esses sis-
temas facilitam a comunicacao entre os sistemas dos diversos dispositivos graficos e
o usuario. Fazem parte desses sistemas os Sistemas HSV, HSL, Munsell e Pantone.
Sao apresentados neste capıtulo apenas o modelo RGB do sistema dos dipositivos
e o modelo HSV pertencente ao sistema de interface de cor, pois esses sao os modelos
discutidos nos trabalhos utilizados como referencia. Maiores detalhes sobre os Sistemas
apresentados podem ser encontrados em (PEDRINI; SCHWARTZ, 2008) e (GOMES; VELHO,
1994).
3.1 Modelo RGB
O Modelo RGB e um sistema aditivo baseado na teoria dos tres estımulos (Tristi-
mulus Color Theory) proposta por Young-Helmholtz. Segundo essa teoria, o olho humano
percebe a cor atraves da estimulacao dos tres pigmentos visuais presentes nos cones da
retina, que possuem picos de sensibilidade aproximadamente nos seguintes comprimentos
de onda: 730 mµ (vermelho), 546 mµ (verde) e 435.8 mµ (azul). Foi definido pela CIE,
em 1931, como um dos modelos basicos de cor.
A representacao do espaco de cores no Sistema de Monitor RGB pode ser represen-
tada como um cubo, conforme ilustracao da Fig. 9, o chamado cubo RGB. Para se obter
uma determinada cor e usado um intervalo pre-especificado, normalmente de 0 a 255,
sendo que a cor preta e obtida pela combinacao (0,0,0), a cor branca (255,255,255), o
vermelho (255,0,0), verde (0,255,0) e o azul (0,0,255). Os demais vertices representam o
complemento de cada cor primaria. Cada ponto no interior do cubo corresponde a uma
cor que pode ser representada pela tripla (R,G,B), com os valores R, G e B variando de 0
a 255. Os tons de cinza sao representados ao longo da diagonal principal do cubo, que vai
da origem (ponto correspondente a cor preta) ate o vertice que corresponde a cor branca.
Cada tom ao longo dessa diagonal e formado por contribuicoes iguais de cada primaria.
Cada pixel tem seu proprio valor RGB representado geralmente por tres bytes, um para
cada componente de cor: vermelho, verde e azul. Se cada componente for armazenado
como um byte, cada um podera representar 256 diferentes intensidades. Isso significa que
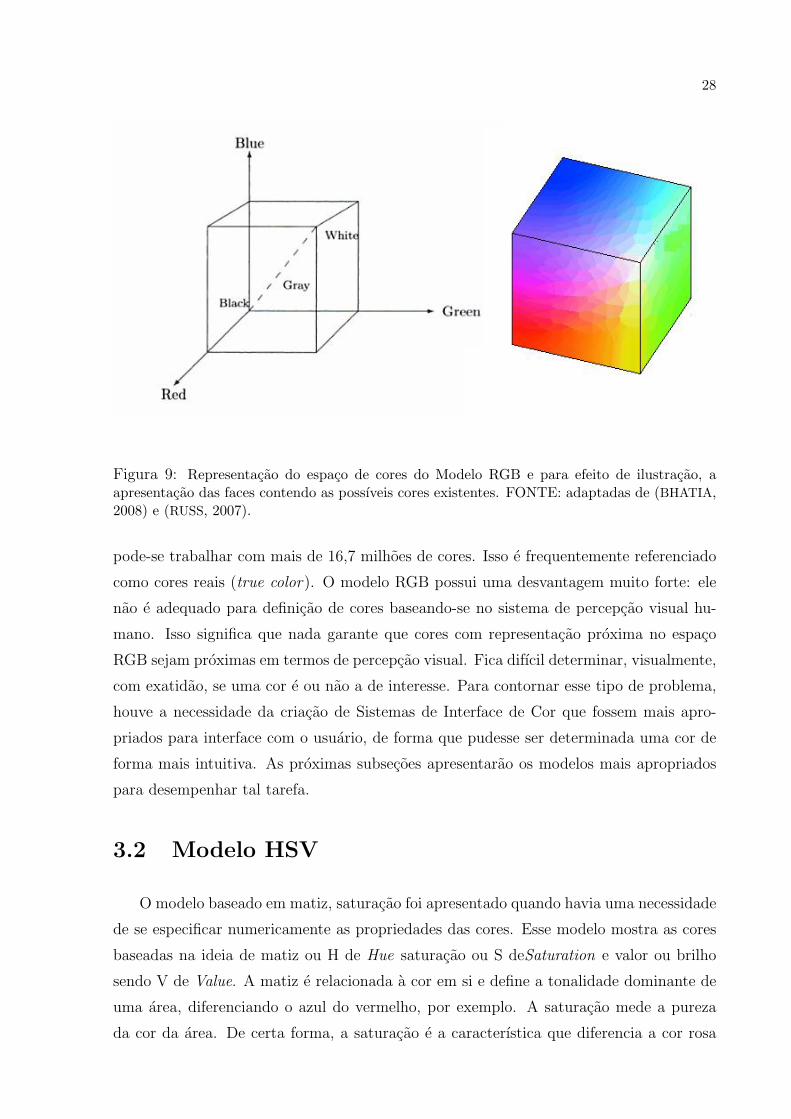
28
Figura 9: Representacao do espaco de cores do Modelo RGB e para efeito de ilustracao, aapresentacao das faces contendo as possıveis cores existentes. FONTE: adaptadas de (BHATIA,2008) e (RUSS, 2007).
pode-se trabalhar com mais de 16,7 milhoes de cores. Isso e frequentemente referenciado
como cores reais (true color). O modelo RGB possui uma desvantagem muito forte: ele
nao e adequado para definicao de cores baseando-se no sistema de percepcao visual hu-
mano. Isso significa que nada garante que cores com representacao proxima no espaco
RGB sejam proximas em termos de percepcao visual. Fica difıcil determinar, visualmente,
com exatidao, se uma cor e ou nao a de interesse. Para contornar esse tipo de problema,
houve a necessidade da criacao de Sistemas de Interface de Cor que fossem mais apro-
priados para interface com o usuario, de forma que pudesse ser determinada uma cor de
forma mais intuitiva. As proximas subsecoes apresentarao os modelos mais apropriados
para desempenhar tal tarefa.
3.2 Modelo HSV
O modelo baseado em matiz, saturacao foi apresentado quando havia uma necessidade
de se especificar numericamente as propriedades das cores. Esse modelo mostra as cores
baseadas na ideia de matiz ou H de Hue saturacao ou S deSaturation e valor ou brilho
sendo V de Value. A matiz e relacionada a cor em si e define a tonalidade dominante de
uma area, diferenciando o azul do vermelho, por exemplo. A saturacao mede a pureza
da cor da area. De certa forma, a saturacao e a caracterıstica que diferencia a cor rosa

29
da cor vermelho. Enquanto a cor vermelho e a cor pura, a cor rosa e um vermelho com
alguma quantidade de cor branca. O valor no modelo HSV esta relacionado a luminancia
da cor. A luminancia e a componente da imagem que so contem as informacoes de brilho
de uma imagem. Ou seja, a luminancia varia de 0 (preto) a 1 (branco) ao longo do eixo V
do cone, onde se encontra a escala de cinza. Os matizes puros sao encontrados no plano
onde a luminosidade e igual a 0.5 e a saturacao e igual a 1.
O sistema HSV e representado por coordenadas em um espaco dentro do qual o modelo
definido e um cone em forma hexagonal (hexacone), ou, uma piramide invertida de seis
lados, conforme ilustracao da Fig. 10. O topo do hexacone (na base) corresponde a V =
1, que contem as cores com mais brilho. Obviamente, as cores apresentadas no plano V
= 1 nao possuem todas as percepcoes possıveis de brilho, podendo ser identificadas por
toda a area do hexacone conforme ilustracao da referida Figura.
Figura 10: Representacao do espaco de cores do Modelo HSV, ilustracao de uma das facesdo hexacone e para efeito de ilustracao, a apresentacao das faces contendo as possıveis coresexistentes. FONTE: adaptadas de (BHATIA, 2008) e (RUSS, 2007).
Observando a ilustracao da da Fig. 10, e possıvel identificar que a componente de
matiz e medida por angulos em torno do eixo vertical, onde o R (Red) e 00, o G (Green)
e 1200 e o B (Blue) e 2400. As cores complementares no modelo HSV estao em posicoes
opostas (1800) no cırculo graduado. O valor da saturacao e uma razao variando de 0, no
centro da linha (eixo V), para 1, na base (lado) do triangulo do hexacone. O ponto no
apice e Preto (B de Black) e tem coordenada 0 para V. Nesse ponto, os valores de H e S
sao irrelevantes. O ponto S = 0, V = 1 e Branco (W de White). Valores intermediarios de
V para S = 0 (no centro da linha) sao os tons de cinza (escala cinza: B - W). Quando S
= 0, o valor de H e irrelevante (denominado por convencao de “indefinido”). Quando S e
diferente de 0, H e relevante. Por exemplo, a cor pura vermelho esta no H = 0◦ ou 360◦, S

30
= 1, V = 1. De fato, qualquer cor com V = 1, S = 1 e a cor pura (saturada) usado como
base inicial para fazer a mistura de cores. Adicionar a cor branca corresponde a reduzir
S (sem alterar V). Sombreamentos sao criados mantendo S = 1 e aumentando V. Tons
sao criados pelo decrescimo de S e V. Obviamente, mudar H corresponde a selecionar a
cor pura com a qual deseja criar uma nova cor.

31
4 Revisao da Literatura
4.1 Segmentacao de geo-objetos em documentos car-
tograficos
Na area de processamento digital de imagens com foco no geoprocessamento, a busca
e reconhecimento automatico de geo-objetos contidos em mapas tem sido tema de um
grande numero de publicacoes nos ultimos 40 anos.
De um modo geral, esse conjunto de publicacoes pode ser dividido em tres categorias.
A primeira trata da busca de um processo de automatizacao na conversao dos geo-objetos
contidos nos mapas em papel para o meio digital (raster to vector). A segunda, trata
da busca de metodos que permitam a segmentacao dos geo-objetos e por fim, a terceira,
trata da busca de metodos para reconstruir e vetorizar os geo-objetos, uma vez que esses
ja foram segmentados. Essas categorias foram propostas por (KARIMA; SADHAL; MC-
NEIL, 1985) onde os autores buscaram, por meio de uma extensa pesquisa, estabelecer
uma classificacao das formas em que dados contidos em documentos sao capturados por
ferramentas CAD. Nesse trabalho, os autores utilizaram os geo-objetos curvas de nıvel,
hidrografia, linhas, rodovias, textos, regioes e/ou sımbolos para a realizacao da classi-
ficacao.
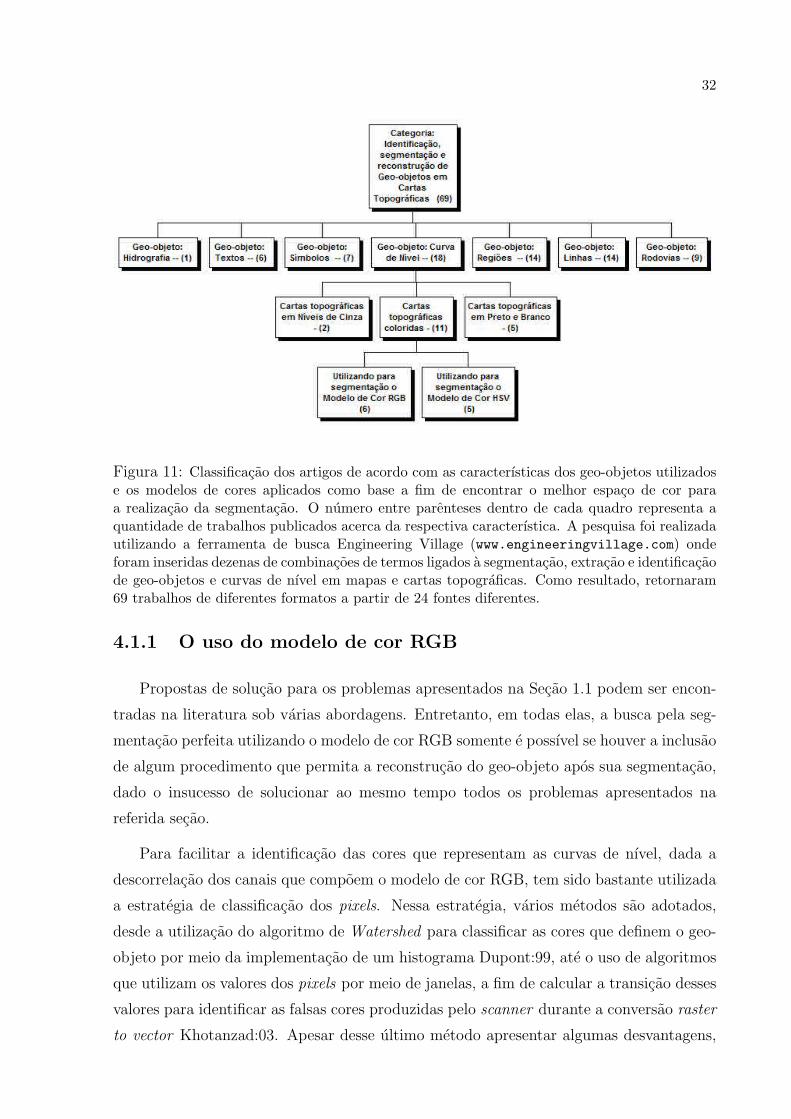
A Fig. 11 apresenta a ilustracao grafica da classificacao adotada neste trabalho para
a identificacao dos principais trabalhos utilizados como referencia. Foram analisados
os seguintes aspectos.: Tipos de geo-objetos segmentados, tipos de cartas topograficas
utilizadas e modelos de cores aplicados para encontrar o melhor espaco de cor para a
realizacao da segmentacao.
Em todos os trabalhos pesquisados nesta dissertacao, seus respectivos autores uti-
lizaram dois modelos de cores aplicados como base, a fim de encontrar um espaco para a
identificacao da cor que representa o geo-objeto curva de nıvel, sendo eles o modelo RGB
ou o HSV.
32
Figura 11: Classificacao dos artigos de acordo com as caracterısticas dos geo-objetos utilizadose os modelos de cores aplicados como base a fim de encontrar o melhor espaco de cor paraa realizacao da segmentacao. O numero entre parenteses dentro de cada quadro representa aquantidade de trabalhos publicados acerca da respectiva caracterıstica. A pesquisa foi realizadautilizando a ferramenta de busca Engineering Village (www.engineeringvillage.com) ondeforam inseridas dezenas de combinacoes de termos ligados a segmentacao, extracao e identificacaode geo-objetos e curvas de nıvel em mapas e cartas topograficas. Como resultado, retornaram69 trabalhos de diferentes formatos a partir de 24 fontes diferentes.
4.1.1 O uso do modelo de cor RGB
Propostas de solucao para os problemas apresentados na Secao 1.1 podem ser encon-
tradas na literatura sob varias abordagens. Entretanto, em todas elas, a busca pela seg-
mentacao perfeita utilizando o modelo de cor RGB somente e possıvel se houver a inclusao
de algum procedimento que permita a reconstrucao do geo-objeto apos sua segmentacao,
dado o insucesso de solucionar ao mesmo tempo todos os problemas apresentados na
referida secao.
Para facilitar a identificacao das cores que representam as curvas de nıvel, dada a
descorrelacao dos canais que compoem o modelo de cor RGB, tem sido bastante utilizada
a estrategia de classificacao dos pixels. Nessa estrategia, varios metodos sao adotados,
desde a utilizacao do algoritmo de Watershed para classificar as cores que definem o geo-
objeto por meio da implementacao de um histograma Dupont:99, ate o uso de algoritmos
que utilizam os valores dos pixels por meio de janelas, a fim de calcular a transicao desses
valores para identificar as falsas cores produzidas pelo scanner durante a conversao raster
to vector Khotanzad:03. Apesar desse ultimo metodo apresentar algumas desvantagens,

33
(pois quando ha intersecao ou fusao de geo-objeto essa abordagem torna-se ineficaz pela
identificacao de algumas cores pertecentes ao elemento como falsas) e possıvel melhora-
lo, agregando novas abordagens. Uma delas, por exemplo, e construir uma aplicacao
que permita selecionar partes do geo-objeto extraindo pequenos fragmentos de curva de
nıvel, a fim de encontrar uma media das tonalidades da cor que a compoem. Depois,
utilizando a distancia de Mahalanobis, detectar a menor distancia entre os tres canais de
cores que representam a cor marrom no espaco de cor do modelo RGB e, a partir das
duas etapas anteriores, implementar uma funcionalidade que permita limiarizar as curvas
de nıvel utilizando, por exemplo, um botao de progressao deslizante a fim de segmentar,
em tempo real, o geo-objeto desejado. Esse procedimento poede ser observado em (CHEN;
TANG; YANG, 2008). Outra forma e melhorar o proprio processo de identificacao das
falsas cores combinando seus respectivos pixels com os pixels alocados na mesma posicao
da imagem original, porem, convertendo-os em nıveis de cinza. A ideia basica do uso dessa
combinacao e que as imagens em nıveis de cinza podem ser representadas com 256 nıveis
e isso diminui a distancia entre as cores que representam as curvas de nıvel. Entretanto,
para a execucao desse metodo, existe uma razoavel sequencia de passos e a necessidade de
implementacao de uma variedade de algoritmos, elevando o custo computacional de todo
o processo Chen:06. Todavia, independentemente das abordagens utilizadas, a qualidade
dos resultados obtidos pode ser questionada por parecer que todos os resultados alcancados
dependem da qualidade dos documentos cartograficos utilizados como base.
Nao obstante, e possıvel abordar o problema de segmentacao de uma forma diferente.
Nesse caso, alterando a forma de analisar o histograma implementado no metodo apre-
sentado por Dupont:99, e possıvel visualizar todos os geo-objetos presentes no documento
cartografico com excecao das curvas de nıvel Pezeshk:08. Porem, e necessaria a conversao
do modelo RGB para o modelo CIE Lab,1 a fim de encontrar a menor distancia entre os
valores das cores geradas pelas falsas cores e aquelas que realmente apresentam as curvas
de nıvel. Ao final dessa abordagem, os resultados alcancados nao parecem ser diferentes
(sob o ponto de vista perceptual) dos resultados alcancados com as abordagens anteriores.
Contudo, no que diz respeito a segmentacao, os quatro problemas apresentados na
Secao 1.1 continuam sem solucao e e possıvel perceber ao longo das ultimas quatro decadas
que o foco maior e dado a etapa de reconstrucao das curvas de nıvel apos a segmentacao.
1Considerado um modelo de cor independente (cor absoluta), pois difere dos modelos RGB e CMYK(cores sintetizadas). O os valores aplicados no espaco CIE Lab sao consistentes em qualquer dispositivo(monitores e impressoras). Ou seja, um dado valor cromatico tera o mesmo resultado, nao importandoo dispositivo utilizado. O que nao ocorre com o modelo RGB por depender do Hardware (monitores,cameras), e CMYK por depender, entre outros fatores, do papel, tipo de tinta e tecnologia de impressaoutilizados.

34
Sobre essa etapa, o maior problema e a reconstrucao dos gaps gerados com a segmentacao
das curvas de nıvel. Nesse caso, uma das formas de solucionar esse tipo de problema e
utilizando a Teoria dos Grafos para conectar as linhas com descontinuidades. Normal-
mente, utiliza-se o algoritmo de Backtracking com o intuito de facilitar a busca dos inıcios
e terminos das linhas que representam as curvas de nıvel Sandhya:09.
4.1.2 O uso do modelo de cor HSV
O modelo de cor HSV tambem pode ser utilizado como meio para a realizacao do pro-
cesso de segmentacao das curvas de nıvel. Entretanto, assim como na sub-secao anterior,
a busca por solucoes para os problemas apresentados na Secao 1.1 somente e possıvel com
o auxılio de algum procedimento que realize a reconstrucao do geo-objeto.
O processo mais utilizado para a identificacao das cores que correspondem as cur-
vas de nıvel e, apos a transformacao do modelo de cor RGB para HSV, vincular alguns
intervalos no canal H como equivalentes aos valores encontrados na representacao das
cores que determinam o referido geo-objeto Arri:99, Salva:03, Loh:04, Dongjun:06. Alem
dessa abordagem, a tentativa de reconstrucao das curvas pode ser amparada pelo uso da
Morfologia Matematica. Iniciando o processo com a conversao do modelo de cor RGB
para o HSV, a reconstrucao dos gaps existentes nas curvas pode ser feita a partir da
realizacao de varias dilatacoes usando um elemento estruturante morfologico. Essa es-
trategia mostra nao ser suficiente, pois ha a necessidade de utilizar outros algoritmos, tais
como a Triangulacao de Delaunay e uma adaptacao do filtro da Mediana para auxiliar no
preenchimento desses gaps. Mesmo assim, e possıvel perceber nos resultados alcancados
que as imagens apresentadas possuem varias curvas com gaps que nao puderam ser re-
construıdos Jinyang:04.
A fim de compreender a importancia do tema ao longo das ultimas quatro decadas,
quando (COFER; TOU, 1972) demonstraram sua preocupacao em definir um processo que
facilite a forma de conversao dos arquivos raster to vector, foi realizada nesta pesquisa
uma ordenacao cronologica das referencias bibliograficas utilizadas nesta pesquisa, sendo
possıvel observar que o assunto de nosso interesse e relativamente recente dados os tra-
balhos apresentados por (DUPONT; DESEILLIGNY; GONDRAN, 1999) e (ARRIGHI; SOILLE,
1999), que tratam efetivamente do assunto referente a segmentacao de curvas de nıvel em
cartas topograficas coloridas.

35
5 Metodos
5.1 Relacao do problema da pesquisa com as hipoteses
levantadas
O problema identificado nesta pesquisa pode ser enunciado da seguinte forma: no
processo de segmentacao de um determinado geo-objeto, os modelos de cores utilizados
como base para identifica-los nao permitem a realizacao de uma segmentacao perfeita
sendo sempre necessaria a aplicacao posterior de um processo de reconstrucao nesse geo-
objeto.
Para buscar um conhecimento cientıfico sobre o problema acima, inicialmente, foram
formuladas duas hipoteses: a primeira parte do princıpio de que o problema e causado
pelo modelo de cor utilizado no processo de segmentacao. A segunda parte do princıpio
que o problema e causado pelo tipo1 de carta topografica digitalizada utilizada nesse
mesmo processo. Apesar do modelo de cor e a qualidade da carta topografica estarem
intrinsicamente ligados no processo de segmentacao, se a avaliacao tiver como foco a com-
paracao entre determinados modelos de cores, nao necessariamente importara a qualidade
atribuıda as cartas, mas sim o desempenho desses modelos na segmentacao de uma quan-
tidade relativa de cartas. Por outro lado, se a avaliacao tiver como foco qual tipo de carta
que se comporta melhor em um determinado modelo de cor, entao esta segunda forma
de avaliar abrangera todos os testes que poderao ser realizados a fim de se identificar o
impacto da combinacao modelo de cor e tipo de carta na causa do problema identificado
nesta pesquisa.
Portanto, uma unica hipotese pode englobar as duas hipoteses inicialmente apresen-
tadas e essa nova hipotese pode ser enunciada a partir do seguinte questionamento: se,
independente do modelo de cor utilizado nos trabalhos pesquisados, os resultados apresen-
1Neste trabalho o tipo da carta topografica refere-se a classificacao qualitativa que essa carta podereceber com relacao ao volume de elementos presentes ao longo do documento e/ou a consistencia da cordesses elementos

36
tados nao sao totalmente satisfatorios por nao apresentarem uma segmentacao perfeita,
entao o que pode comprometer os resultados e a consistencia da cor do geo-objeto apresen-
tado e/ou a concentracao de variados geo-objetos ao longo da carta topografica utilizada.
Nesse caso, a hipotese e pertinente, pois na maioria das vezes, um determinado geo-objeto
apresentado em uma carta topografica possui varios tracados inconsistentes, um razoavel
volume de ruıdos em consequencia do processo de digitalizacao, alem de uma grande con-
centracao de elementos presentes em um mesmo espaco do documento. Entretanto, em
todos os trabalhos pesquisados, os resultados apresentados sempre estao amparados em
um fragmento de uma carta topografica onde o geo-objeto de interesse apresenta excelentes
caracterısticas, tais como a firmeza na cor do elemento que foi segmentado, produzindo
um tracado consistente e pouca fusao de elementos. Sendo assim, o objetivo da Secao
5.2 e efetuar deducoes logicas, partindo da hipotese que foi enunciada como premissa e
chegar a uma possıvel falsificacao. Ou seja, uma hipotese nao falseavel e uma hipotese
corroborada e isso significara que o problema apresentado neste trabalho e uma teoria
aceitavel, isto e, uma verdade temporaria. Para que seja realizada uma tentativa desse
falseamento e necessario estabelecer um vınculo entre essa hipotese e os dados adquiridos
com o metodo que sera apresentado na Secao 5.6. Esse processo de falseamento pode ser
realizado por meio da elaboracao de uma questao chave, que nao passa de uma trans-
formacao da hipotese numa pergunta e que pode ser testada por de meio de questoes. As
questoes-teste permitem que se aceite, rejeite ou modifique a hipotese, que se coletem os
fatos e dados necessarios para enderecar cada problema associado a hipotese bem como
investigar a natureza, logica e estrutura propria da hipotese Quintela:10.
5.2 Hipotese, questao-chave e suas questoes-teste
Hipotese
Se, independente do modelo de cor utilizado, os resultados apresentados nao sao to-
talmente satisfatorios por nao apresentarem uma segmentacao perfeita, entao o que pode
comprometer os resultados e a consistencia da cor do geo-objeto apresentado e/ou a con-
centracao de variados geo-objetos ao longo da carta topografica utilizada.
Questao-chave da Hipotese
A consistencia da cor do geo-objeto curva de nıvel e a concentracao de variados tipos
de objetos em um mesmo espaco do documento sao as unicas responsaveis por determinar

37
a qualidade do processo de segmentacao?
Questoes-teste da Hipotese
1. A consistencia da cor da curva de nıvel interfere no processo de segmentacao pro-
duzindo melhores ou piores resultados independente do modelo de cor utilizado?
2. A classificacao da carta (definida pelo nıvel de presenca de variedades de geo-objetos)
interfere no processo de segmentacao produzindo melhores ou piores resultados in-
dependente do modelo de cor utilizado?
3. Um modelo de cor pode se comportar melhor que o outro, obtendo melhores resul-
tados no processo de segmentacao das curvas de nıvel em carta topografica colorida?
5.3 Descricao da amostra
Para a realizacao dos experimentos que tem como objetivo testar os metodos apresen-
tados neste Capıtulo, foram cedidas pelo Laboratorio de Cartografia do Departamento de
Geografia da Pontifıcia Universidade Catolica de Minas Gerais (PUC Minas), 15 cartas
topograficas coloridas de diferentes regioes do Estado de Minas Gerais. Essas cartas foram
produzidas em datas variadas entre o perıodo de 1969 a 1979 e possuem mal estado de
conservacao, estando a maior parte com coloracao amarelada devido ao tempo e a forma
como foram armazenadas antes de serem adquiridas pela instituicao.
5.4 Instrumentos de medida
Para a classificacao das cartas topograficas, utilizou-se como referencial de medida
de qualidade das cartas topograficas coloridas listadas na Secao 2.1, o modelo de analise
visual estabelecido por (GRIFFITH, 1983), uma vez que essas cartas apresentam todos os
elementos necessarios para elaborar um inventario qualitativo da regiao que esse docu-
mento representa. A forma de classificacao e obtida atribuindo uma escala de valores
(de 1 a 5 pontos) para todas as quadrıculas apresentadas que compoem cada uma das
15 cartas topograficas utilizadas no experimento, de acordo com tres categorias distintas:
(a) contexto topografico; (b) tipo de geo-objeto e; (c) numero de combinacoes entre esses
tipos. Ao final desse processo de avaliacao, todos os pontos obtidos em cada quadrıcula
sao somados e esse valor e dividido pelo numero total de quadrıculas que compoem a carta

38
topografica avaliada. Com o resultado obtido e possıvel classifica-la conforme a presenca
de variedades de elementos / geo-objetos (baixa, baixa-media, media, media-alta ou alta).
Para a classificacao do geo-objeto curva de nıvel, utilizou-se como criterio a con-
sistencia das curvas de nıvel ao longo de cada quadrıcula contida no documento car-
tografico. Essa consistencia foi baseada nos aspectos relativos a sua coloracao. A classi-
ficacao foi realizada por meio da selecao com o mouse, a partir da imagem aumentada de
cada carta topografica, de pequenos fragmentos da curva de nıvel onde foram capturados
apenas os pixels da cor que representa o referido geo-objeto (cor marrom). Apos a captura
desses pixels, foi calculada a media de cada canal a partir da soma desses valores e por
fim, os tres valores combinados (R, G e B) foram convertidos para o formato HSV. A clas-
sificacao foi definida como fraca (para os valores do canal V entre 90 a 100), fraca-media
(para os valores do canal V entre 70 a 89), media (para os valores do canal V entre 50 a
69), media-forte (para os valores do canal V entre 30 a 49) ou forte (para os valores do
canal V entre 10 a 29) em virtude da firmeza da cor. Vale ressaltar que essa classificacao
foi realizada de forma visual combinada com a ordenacao dos valores apresentados pelo
canal V, que representa o brilho de cada cor.
Para a validacao das imagens contendo o geo-objeto curva de nıvel vetorizado, utilizou-
se como referencial a Metodologia de Validacao da Vetorizacao elaborada pelo (IBGE,
2009).
5.5 Implementacao do processo de segmentacao
Para a implementacao do processo de segmentacao, foram eleitos, entre os onze artigos
apresentados no Capıtulo 4, os trabalhos de (CHEN; TANG; YANG, 2008) e de (SALVATORE;
GUITTON, 2003) por demonstrarem maior efetividade na segmentacao dos geo-objetos
curvas de nıvel em relacao aos demais trabalhos pesquisados. Cada um utiliza-se de um
modelo de cor diferente e de um determinado metodo para realizar a segmentacao dessas
curvas.
5.5.1 Segmentacao das curvas de nıvel utilizando o espaco decor do modelo RGB
O algoritmo implementado para a segmentacao das curvas de nıvel empregando o
modelo RGB permite selecionar, com o uso do mouse, pequenas partes de uma determi-
nada curva de nıvel. Essa acao tem como objetivo construir um vetor C0 (R0, G0, B0) a

39
partir da captura de um conjunto de pixels que representam a cor marrom. Utilizando o
calculo da media (representada por m) e da matriz de covariancia dos valores que repre-
sentam cada cor das curvas nos canais R, G e B (representada por S) e construıda uma
funcao de densidade de probabilidade Gaussiana (representada pela equacao 5.1) para a
classificacao de todas as variacoes da cor marrom existentes nos conjuntos selecionados.
K(c, V ) =1
(2π)n/2|S|1/2exp
[−1
2(c− m)′S−1(c− m)
](5.1)
Inicialmente, pode ser intuitivo pensar que classificar todos os pixels que representam
a cor marrom utilizando apenas a distancia Euclidiana geraria bons resultados (essa
distancia e representada pela equacao 5.2, onde d2(c, C0) e a distancia entre o pixel c(r, g, b)
e C0).
d2(c, C0) = (r −R0)2 + (g −G0)2 + (b−B0)2 (5.2)
Todavia esse pensamento esta incorreto. As cores que correspondem a curva de nıvel
estao dispostas no espaco RGB numa especie de uma estrutura em um formato elip-
soidal que traspassa os tres vetores do espaco vetorial representados pelos eixos R, G
e B (conforme pode ser exemplificado pela ilustracao da Fig. 12). Ou seja, estao todas
aglomeradas em uma regiao desse espaco sob o referido formato. Com isso, a identificacao
correta desse aglomerado torna-se difıcil, dada a necessidade de definir um limiar T que
separe os dois elementos presentes na carta, isto e, os valores das cores que indicam as
curvas e o fundo da imagem, por causa do aliasing e das falsas cores. Isso significa que,
utilizando o exemplo do elipsoide, o limiar T seria as bordas desse formato elipsoidal e,
obviamente, tendo o aliasing e as falsas cores nessa mesma fronteira, torna-se delicado
separa-los de forma correta.
Portanto, para identificar a distancia dos pixels que possuem apenas as cores proximas
daquelas que compreendem o geo-objeto, e usada a distancia de Mahalanobis (represen-
tada pela equacao 5.3). Com ela e possıvel medir a distancia entre c e m (apresentada
na equacao ) que, nesse caso, define a distancia entre uma cor c o centro dessa cor (a
cor pura que representa o marrom). Ou seja, quando o limiar T correto e encontrado, as
bordas desse elipsoide fictıcio contemplarao em seu interior apenas as cores pertinentes a
cor marrom, bastando agora implementar uma funcao que receba os parametros (m, S, T ),

40
Figura 12: Exemplo do formato da distribuicao das cores que representa as curvas de nıvelno espaco vetorial que corresponde ao espaco de cores do modelo RGB. Fonte: (CHEN; TANG;YANG, 2008)
onde m representa o centro dessa superfıcie e S as bordas do elipsoide.
d2(c,K) =1
2(c− m)′S−1(c− m) (5.3)
Vale ressaltar que existem diferentes tonalidades que representam o fundo da imagem.
Portanto, para que o algoritmo obtenha resultados favoraveis, e necessario selecionar com
o mouse varias pequenas partes de uma determinada curva de nıvel para que seja obtido
um conjunto de exemplos dos valores que representam os contrastes das curvas com o
fundo. A seguir e apresentado o algoritmo implementado para esse metodo.
Algorithm 1 Segmentacao (P,V)
Requer: : Imagem P e Conjunto V = (m, S, T )1: para cada pixel p(x, y) da imagem P faca2: Distancia (x, y) = (c− µ)′Σ−1(c− µ) onde c corresponde a c(r, g, b)3: Limiar (x, y) = T4: fim para5: Cria uma nova imagem P ′ de cor Branca6: Inicializa L = verdadeiro7: enquanto L faca8: L = falso9: para cada pixel p′(x, y) da imagem P ′ faca
10: se Distancia (x, y) < Limiar (x, y) entao11: p′(x, y) = cor Preto12: L = verdadeiro13: fim se14: fim para15: fim enquantoGarante: Imagem binaria P ′

41
Para que o Algoritmo 1 funcione, o usuario deve selecionar com o mouse, a partir
da imagem ampliada, pequenos fragmentos da curva de nıvel, buscando apenas os pixels
pertencentes a curva de nıvel. A funcao p(x, y) apresentada no algoritmo representa esta
acao. Depois, o Algoritmo 1 procura as distancias dos pixels relativos a coloracao de inte-
resse. Nesse caso, essa medida consiste na distancia de Mahalanobis conforme a equacao
5.3. Ela e calculada considerando a dispersao dos dados, ou seja, e calculada sempre
entre um ponto medio e uma amostra. Para cada uma dessas classes, ela utiliza um vetor
de medias (nesse caso, o vetor e construıdo calculando-se a media de todos os valores de
cada canal de cor dos pixels capturados) e a partir dessas medias, a matriz de covariancia.
Com isso, e possıvel encontrar a distancia entre o centro da cor marrom e todas aquelas
proximas dessa tonalidade. A funcao Distancia(x, y) apresentada no Algoritmo recebe
o valor que e calculado pela distancia de Mahalanobis e Limiar(x, y) recebe o valor do
Limiar necessario para o funcionamento correto do processo de segmentacao.
5.5.2 Segmentacao das curvas de nıvel utilizando o espaco decor do modelo HSV
Apesar da transformacao do modelo RGB para o modelo HSV nao ser linear, o algo-
ritmo necessario para a transformacao desse espaco de cor e facilmente implementado. Os
valores dos canais R, G e B sao dimensionados em vetores de [0,255] enquanto os valores
do modelo HSV aparecem nas seguintes gamas: o H em graus de [0, 360], onde: [0,60]
vermelhos, [61,120] amarelos, [121, 180] verdes, [181, 240] cianos, [241, 300] azuis e de
[301, 360] magentas. Os canais S e V foram implementados na gama [0, 100]. O canal V
recebe o maior dos valores identificados no canais do RGB, o canal S recebe a gama de
valores RGB em relacao a V e, o H depende do RGB em funcao dos maiores valores de
um de seus canais. Caso contrario, se os valores desses canais forem iguais, entao a cor e
indefinida. Essa conversao pode ser melhor compreendida observando o Algoritmo 2, que
foi implementado para essa finalidade.
Apos a realizacao da conversao, o objetivo passa a ser encontrar a cor marrom que
representa as curvas de nıvel localizadas dentro desse novo espaco de cor. Por meio
de alguns experimentos, foi possıvel observar que, quando o canal V ≤ 25, as cores
identificadas sao pretas ou proximas dessa cor e as cores com S ≤ 20 e V ≥ 60 sao
brancas. Em uma carta topografica digitalizada, ≈ 80% dos pixels representam as cores
pretas ou brancas ou muito claras. Com isso, foi construıdo um histograma da matiz
desses pixels restantes e foi detectado que os valores encontrados para a cor marrom no

42
Algorithm 2 Converte RGBparaHSV (P)
Requer: : Pixel P (x, y)1: P {Pixel representado por P (x, y). Cada pixel P , possui P.Red, P.Green e P.Blue }2: max = maximo(P.Red, P.Green, P.Blue)3: min = minimo(P.Red, P.Green, P.Blue)4: V = max5: S = (max−min)/max6: S = (V −min)/V7: se P.Red == P.Green == P.Blue entao8: retorne indefinido {Nao ha cor}9: fim se
Garante: Pixel P ′(x, y) {Pixel representado por P (x, y). Cada pixel P ′, possui P ′.H,P ′.S e P ′.V }
canal H estao concentradas entre 50 a 75 referindo-se as curvas de nıvel.
5.6 Coleta dos dados
O diagrama ilustrado na Fig. 13 apresenta as etapas necessarias para a realizacao
da coleta de dados que auxiliara na realizacao da tentativa de falseamento da questao
chave apresentada nesta dissertacao e que, posteriomente, sera discutida no Capıtulo 7.
Essa coleta foi realizada por meio dos resultados produzidos ao final de cada uma dessas
etapas.
Para a Etapa 1 (Selecao), foram selecionadas 15 cartas topograficas em escala 1:100.000
coloridas digitalizadas com a mesma resolucao (Tabela 1). Todas essas cartas foram con-
vertidas em imagens utilizando um scanner profissional de alta resolucao (scanner de
tambor) para largura maxima da mıdia: 106,7 cm e precisao de linhas: +/- 0,3% (eixo
Y), +/- 0,1% (eixo X).
Para a Etapa 2 (Classificacao das cartas), foram analisadas as 783 quadrıculas conti-
das em cada uma das 15 cartas topograficas, perfazendo um total de 11.745 quadrıculas
avaliadas. A classificacao foi realizada conforme o metodo proposto por (GRIFFITH, 1983)
e apresentado na Secao 5.4. Na Etapa 3 (Classificacao do geo-objeto curva de nıvel), a
classificacao foi definida a partir da estrutura das curvas de nivel, onde foram avaliadas
as caracterısticas da cor. Quanto ao processo da Etapa 4 (Vetorizacao das cartas sele-
cionadas), foram gerados 15 arquivos no formato DXF a partir do software ArcGISTM.
Esses arquivos foram convertidos em imagens no formato JPEG para serem utilizados
na Etapa 6. Vale ressaltar que os processos de classificacao e de vetorizacao de todas as

43
Figura 13: Diagrama contendo as etapas necessarias para a realizacao da coleta de dados.
cartas selecionadas foram realizados sob a supervisao do Laboratorio de Cartografia da
PUC Minas2
No processo de segmentacao da Etapa 5, foram geradas 30 imagens das 15 cartas
topograficas selecionadas, sendo 15 imagens provenientes da operacao de segmentacao
utilizando o modelo de cor RGB a partir do algoritmo proposto por (CHEN; TANG; YANG,
2008) e 15 imagens provenientes da operacao de segmentacao utilizando o modelo de cor
HSV a partir do algoritmo proposto por (SALVATORE; GUITTON, 2003).
Para a identificacao dos valores relativos a recuperacao do geo-objeto curvas de nıvel a
partir do uso dos espacos de cores RGB e HSV, e apresentado pela Etapa 6 (Identificacao
dos ındices de Precisao, Acertividade e Media Harmonica ) um conjunto de procedimen-
tos que possibilitaram a avaliacao da relevancia dos dados retornados no processo de
segmentacao. Nessa etapa, as imagens resultantes do processo de segmentacao sao com-
binadas com suas respectivas imagens vetorizadas, sendo ambas imagens binarias. Ou
seja, cada par de imagens binarias proveniente dos modelos RGB e HSV possui uma im-
2O trabalho foi supervisionado pelo Cartografo Eng. Dartagnan Lino Viana - Especialista em Geo-processamento - responsavel pelo Laboratorio de Cartografia da PUC Minas.

44
Item Regiao Medidas Escala Nr. deQuadrıculas
DPI
1 Buritis 257.9 x 306.5 cm2 Carmo Paranaıba 251.9 x 306.2 cm3 Curvelo 253.2 x 308.3 cm4 Lagamar 251.9 x 306.1 cm5 Manhuacu 248.4 x 308.3 cm6 Mariana 249.9 x 309.2 cm7 Miraporanga 254.1 x 307.7 cm8 Monte Carmelo 250.0 x 305.4 cm 1:100.000 27 x 29 = 783 729 Morada Nova 249.3 x 304.0 cm10 Morro da Garca 241.8 x 293.8 cm11 Patos de Minas 249.3 x 304.5 cm12 Presidente Olegario 247.9 x 305.7 cm13 Raul Soares 237.5 x 291.7 cm14 Serra Selada 237.5 x 296.9 cm15 Serro 249.6 x 305.9 cm
Tabela 1: Caracterısticas basicas das imagens das cartas topograficas coloridas utilizadas noexperimento. Apesar de diferentes medidas e escalas, todas possuem a mesma resolucao
agem binaria ja vetorizada do geo-objeto que se deseja segmentar. A partir da operacao
logica AND, onde e realizado o E logico entre cada pixel correspondente das duas imagens
(segmentada e vetorizada), as imagens sao combinadas produzindo uma nova imagem con-
tendo apenas os pixels que sao comuns entre elas. Com essa operacao e possıvel comparar
a imagem binaria gerada pelo processo de segmentacao a imagem binaria vetorizada, que
contem o conjunto de pixels que idealmente deveria ser segmentado. Com isso e possıvel
obter tres ındices de avaliacao: precisao, acertividade e media harmonica.
A precisao e a fracao dos pixels segmentados pelo algoritmo que possuem corres-
pondencia na carta vetorizada. Nesse processo destaca-se uma caracterıstica importante
das imagens segmentadas: as imagens podem conter, alem do geo-objeto curva de nıvel,
outros geo-objetos que foram segmentados por possuırem os mesmos tons de cores. A
essa similaridade, denominamos falso-positivo. Entretanto, e importante observar nessas
imagens resultantes que, apesar de haver geo-objetos segmentados diferentes das curvas,
a maior parte dos pixels que compoem essas imagens constituem as curvas de nıvel. Essa
quantidade maior de pixels que representam o geo-objeto curva de nıvel supostamente
permitiria elevar o percentual de precisao nesta pesquisa. Todavia, pelo fato das curvas
segmentadas possuırem mais de um pixel para representarem sua espessura, diferente
das curvas vetorizadas que necessitam apenas de um pixel para representar essa mesma
espessura, essa relacao tende a produzir baixos ındices de precisao do conjunto de imagens
segmentadas.

45
Precisao =area imagem segmentada ∩ area imagem vetorizada
area imagem segmentada(5.4)
Nesse caso, a equacao 5.4 representa a razao do numero de pixels recuperados por
meio da combinacao da imagem segmentada e imagem vetorizada sobre o total de pixels
contidos na imagem segmentada. Essa razao mede o sucesso do metodo em nao recuperar
pixels que nao sejam relevantes de acordo com a necessidade de realizar a vetorizacao
automatica.
A Acertividade e a fracao dos pixels da carta vetorizada que foram segmentadas
pelo algoritmo. A acertividade mede o sucesso do metodo em recuperar os pixels que
representam a curva de nıvel. Nesse processo, a principal caracterıstica observada e da
imagem resultante do processo de segmentacao segmentar o que deveria ser segmentado.
A equacao 5.5 representa a razao do numero de pixels recuperados por meio da combinacao
da imagem segmentada e imagem vetorizada sobre o total de pixels contidos na imagem
contendo o objeto vetorizado.
Acertividade =area imagem segmentada ∩ area imagem vetorizada
area imagem vetorizada(5.5)
A media harmonica e uma medida que calcula a media harmonica ponderada dos
valores da acertividade e precisao. Dessa forma, o valor calculado por essa media indica
se um grupo de pixels contem todos os elementos que compoem a curva de nıvel e apenas
esses elementos. O valor da media harmonica de um grupo de pixels que compoem um
conjunto de curvas de nıvel pode ser calculado pela equacao 7.2
Media Harmonica =2× precisao× acertividade
precisao + acertividade(5.6)
Essa medida assume valores no intervalo [0, 1]. O valor 0 indica que nenhum pixel que
faz parte do conjunto de pixels que compoem as curvas de nıvel foi segmentado e o valor
1 indica que todos os pixels que compoem as curvas de nıvel foram segmentados. Assim,
a segmentacao ideal deve retornar um valor igual a 1.

46
6 Apresentacao dos Resultados
6.1 Apresentacao dos resultados obtidos
Neste capıtulo estao descritos os resultados dos experimentos realizados para avaliar o
metodo apresentado na Secao 5.6. O referido metodo foi dividido em 6 etapas, iniciando-
se com a selecao das cartas topograficas coloridas (1a Etapa), passando pela etapa de
classificacao dessas cartas (2a Etapa), classificacao das cores que representam as curvas de
nıvel (3a Etapa), vetorizacao das curvas de nıvel apresentadas em cada uma das 15 cartas
topograficas selecionadas (4a Etapa), operacao de segmentacao utilizando os modelos de
cores RGB e HSV (5a Etapa) e por fim, a 6a Etapa. A ultima etapa e responsavel por
identificar os ındices de Precisao, Acertividade e a Media Harmonica gerados a partir
de variadas operacoes, com o objetivo de produzir os resultados conclusivos que serao
apresentados ao final desta dissertacao.
Sobre a Etapa 2, os resultados relativos a classificacao das cartas topograficas estao
apresentados na 6a coluna da Tabela 2. Esses resultados foram avaliados de acordo com
o modelo de analise visual estabelecido por (GRIFFITH, 1983). Para a Etapa 3, os resul-
tados obtidos no processo de classificacao do geo-objeto curva de nıvel estao apresentados
7a coluna da mesma Tabela. Ainda nessa Tabela, as cores apresentadas na 8a coluna
representam as cores das curvas de nıvel existentes em cada uma das cartas topograficas
listadas na 2a coluna, juntamente com seus respectivos valores representados pelos canais
de cores do modelo HSV.
Na Etapa 4 (Vetorizacao das cartas selecionadas) foram produzidas 15 imagens binarias
contendo o elemento curva de nıvel vetorizado, onde os vetores representando o geo-objeto
curva de nıvel foram representados pela cor preta.
A Etapa 5 foi realizada por meio da execucao de duas funcionalidades implementadas
utilizando os modelos de cores RGB e HSV (ilustracoes das Fig. 14 e 15). Essa execucao
utilizou como base 15 cartas topograficas coloridas representando variadas regioes do Es-

47
Classificacao da cores de acordo com as caracterısticas do geo-objetoitem Carta topografica Canal
HueCanalSa-tura-tion
Canalvalue
Concen-tracao deelementos(2a Etapa)
Classifica-cao daCurva denıvel (3a
Etapa)
Cor dacurva denıvel
1 Carmo do Paranaıba 24 74 79 Baixa-media fraca-media
2 Presid. Olegario 27 37 77 Baixa-media fraca-media
3 Patos de Minas 27 43 73 Baixa fraca-media
4 Serro 26 42 65 Media-alta media
5 Manhuacu 30 37 63 Media media
6 Morada Nova 29 34 57 Baixa-media media
7 Morro da Garca 24 47 49 Media media-forte
8 Lagamar 26 45 46 Alta media-forte
9 Mariana 20 36 43 Media-alta media-forte
10 Curvelo 32 25 43 Media-alta media-forte
11 Buritis 32 27 43 Alta media-forte
12 Monte Carmelo 35 19 37 Media-alta media-forte
13 Miraporanga 32 29 36 Media-alta media-forte
14 Raul Soares 36 39 33 Media media-forte
15 Serra Selada 36 27 28 Alta forte
Tabela 2: Resultados alcancados ao final das Etapas 2 e 3, classificacao das cartas topograficae geo-objetos respectivamente.

48
tado de Minas Gerais conforme apresentadas na Secao 5.6. Essas cartas foram classificadas
de acordo com a quantidade de geo-objetos apresentados dentro de uma quadrıcula. A
area dessa quadrıcula foi delimitada pela malha de coordenadas do referido documento
geografico. No Apendice ?? sao apresentadas amostras de fragmentos das imagens seg-
mentadas de cada carta topografica, selecionadas a partir do uso dos modelos de cores
RGB e HSV. Nao obstante, sao apresentadas tambem as mesmas imagens, porem, vetor-
izadas.
Figura 14: Interface da aplicacao implementada para a segmentacao utilizando o modelo RGB.Note que a ilustracao apresenta duas imagens contendo o mesmo fragmento de uma carta to-pografica. A imagem da esquerda, apresenta o fragmento da carta original. A da direita,apresenta as curvas de nıvel que foram segmentadas.
O limiar necessario para segmentar o geo-objeto utilizando o modelo de cor RGB e
obtido interativamente por meio de uma “barra deslizante”localizada na interface desen-
volvida a partir do algoritmo 1, apresentado na Sub-secao 5.5.1. Nesse modelo de cor,
o limiar e representado diretamente pelo valor obtido com a distancia de Mahalanobis.
Ao deslizar essa “barra”, e produzido um esmaecimento da imagem ate surgirem apenas
as curvas de nıvel. Ou seja, o limiar de identificacao das segmentacao das curvas esta
associado ao valor da menor correlacao entre os canais de cores que definem a cor da
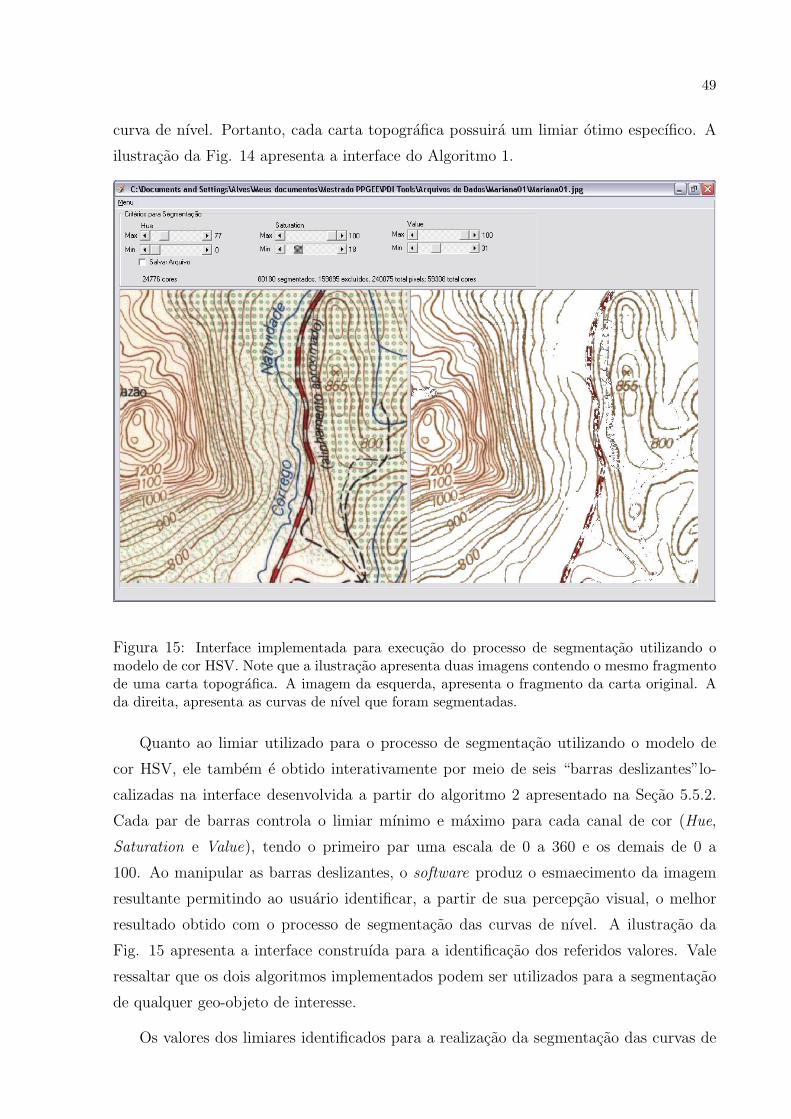
49
curva de nıvel. Portanto, cada carta topografica possuira um limiar otimo especıfico. A
ilustracao da Fig. 14 apresenta a interface do Algoritmo 1.
Figura 15: Interface implementada para execucao do processo de segmentacao utilizando omodelo de cor HSV. Note que a ilustracao apresenta duas imagens contendo o mesmo fragmentode uma carta topografica. A imagem da esquerda, apresenta o fragmento da carta original. Ada direita, apresenta as curvas de nıvel que foram segmentadas.
Quanto ao limiar utilizado para o processo de segmentacao utilizando o modelo de
cor HSV, ele tambem e obtido interativamente por meio de seis “barras deslizantes”lo-
calizadas na interface desenvolvida a partir do algoritmo 2 apresentado na Secao 5.5.2.
Cada par de barras controla o limiar mınimo e maximo para cada canal de cor (Hue,
Saturation e Value), tendo o primeiro par uma escala de 0 a 360 e os demais de 0 a
100. Ao manipular as barras deslizantes, o software produz o esmaecimento da imagem
resultante permitindo ao usuario identificar, a partir de sua percepcao visual, o melhor
resultado obtido com o processo de segmentacao das curvas de nıvel. A ilustracao da
Fig. 15 apresenta a interface construıda para a identificacao dos referidos valores. Vale
ressaltar que os dois algoritmos implementados podem ser utilizados para a segmentacao
de qualquer geo-objeto de interesse.
Os valores dos limiares identificados para a realizacao da segmentacao das curvas de

50
nıvel nas cartas topograficas podem ser observados na Tabela 3. Na 3a coluna da referida
Tabela, sao apresentados os valores identificados a partir do uso do modelo de cor RGB
e da 4a a 9a coluna da mesma Tabela sao apresentados os valores utilizados para cada
canal do modelo de cor HSV a partir de valores minimo e maximo. Vale ressaltar que a
Tabela 3 apresenta uma parcial dos dados coletados durante o experimento e os valores
apresentados foram selecionados em virtude das maiores medias harmonicas alcancadas
pelos referidos modelos. Especificamente sob o Modelo HSV, foram avaliadas as medias
alcancadas com a manipulacao de cada um dos tres canais, sobressaindo-se as medias
harmonicas obtidas na manipulacao do canal Saturation.
As colunas 10a, 11a, 12a, e 13a da Tabela 3 apresentam, respectivamente, a quantidade
total de pixels existentes em cada imagem e subsequentemente a quantidade de pixels
que foram segmentados a partir dessa imagem, a quantidade de pixels que compoem a
imagem contendo o geo-objeto vetorizado e por fim, a quantidade de pixels que compoem
a imagem classificada como relevante apos a realizacao da operacao AND entre as imagens
segmentadas e sua respectiva imagem vetorizada. Com a combinacao desses valores, foi
possıvel identificar a precisao, acertividade e a media harmonica alcancada para cada
carta topografica.
Figura 16: Interface da aplicacao implementada para realizacao da operacao logica AND entreuma imagem contendo o geo-objeto curva de nıvel segmentado (1a imagem menor a esquerda)e sua respectiva imagem mestre contendo o mesmo geo-objeto vetorizado (2a imagem menor aesquerda). A imagem maior a direita, representa o resultado da operacao contendo apenas ospixels comuns entre as duas imagens.
Com relacao a Etapa 6 (Coleta de dados), as colunas 14a, 15a e 16a da Tabela 3

51
apresentam os valores que indicam, respectivamente, a precisao, a acertividade e a media
harmonica alcancada para cada carta topografica por meio dos dois modelos de cores
utilizados. As primeiras 15 linhas da referida Tabela apresentam os valores obtidos a
partir do modelo RGB, e as restantes representam os valores obtidos a partir do modelo
de cor HSV. Esses valores foram alcancados a partir do Limiar definido para cada Modelo
de Cor. A ilustracao apresentada na Fig. 16 apresenta a interface implementada para
a realizacao da operacao logica AND utilizada como base para a identificacao dos pixels
relevantes para a identificacao da precisao, acertividade e media harmonica.
Para a identificacao dos valores referentes a esses tres ındices, cada carta produziu
uma nova imagem a partir de cada limiar obtido pelos dois modelos. Na utilizacao do Mo-
delo RGB, o limiar foi definido a partir da menor para a maior Distancia de Mahalanobis
identificada. Em media, foram produzidas 590 imagens para cada carta topografica. Na
utilizacao do Modelo HSV, o limiar foi definido a partir da manipulacao dos valores relati-
vos a cada um de seus canais. Esse procedimento produziu um conjunto de 1.120 imagens
para cada carta topografica. Esses conjuntos foram obtidos da seguinte forma:
• Para o canal Hue, inicialmente foram alterados o valor mınimo do canal movendo
a barra de progressao do valor mınimo (0) ate o valor maximo (360). Ou seja,
([0, 360] , [1, 360] , . . . , [360, 360]) a fim de reduzir o espaco de cores deste canal. A
seguir, o mesmo procedimento foi realizado, porem no sentido inverso
([0, 360] , [0, 359] , . . . , [0, 0]).
• Para os canais Saturation e Value, os procedimentos foram os mesmos daqueles rea-
lizados para o canal Hue. Entretanto, para esses canais, o espaco foi delimitado
entre 0 a 100.

52
Parcia
ld
os
resu
ltados
cole
tad
os
du
rante
oexp
erim
ento
item
Cart
aT
op
ogra
fica
Dis
t.M
a-
hala
nob
is
Hu
e
(min
)
Hu
e
(max)
Sat.
(min
)
Sat.
(max)
Val.
(min
)
Val.
(max)
Qtd
e
Pxl
Tota
l
Qtd
e
Pxl
Seg
-
men
-
tad
o
Qtd
e
Pxl
Vet
or-
izad
o
Qtd
e
Pxl
Rel
e-
vante
Pre
ci-
sao
Ace
r-
tivi-
dad
e
Med
ia
Har-
mon
ica
(max)
1B
uri
tis
70
00
00
0246015
47415
11340
8173
0,1
70,7
20,2
8
2C
arm
oP
ara
naib
a27
00
00
00
239120
81508
18592
14357
0,1
80,7
70,2
9
3C
urv
elo
18
00
00
00
237144
60046
13316
9766
0,1
60,7
30,2
7
4L
agam
ar
833
00
00
00
239604
239604
24031
24031
0,1
01,0
00,1
8
5M
an
huacu
80
00
00
0232804
96491
32936
21802
0,2
30,6
60,3
4
6M
ari
an
a13
00
00
00
240075
102091
28060
22525
0,2
20,8
00,3
5
7M
irap
ora
nga
12
00
00
00
251196
43682
10016
7392
0,1
70,7
40,2
8
8M
onte
Carm
elo
14
00
00
00
239590
74040
15604
11950
0,1
60,7
70,2
7
9M
ora
da
Nova
44
00
00
00
242048
58100
11308
8202
0,1
40,7
30,2
4
10
Morr
od
aG
arc
a20
00
00
00
215748
52689
7166
4663
0,0
90,6
50,1
6
11
Pato
sd
eM
inas
20
00
00
00
237650
31546
7432
5777
0,1
80,7
80,3
0
12
Pre
sid
.O
legari
o13
00
00
00
240099
34636
11658
5962
0,1
70,5
10,2
6
13
Rau
lS
oare
s16
00
00
00
210672
114216
26073
20744
0,1
80,8
00,3
0
14
Ser
raS
elad
a417
00
00
00
215760
215760
20893
20893
0,1
01,0
00,1
8
15
Ser
ro13
00
00
00
242554
71353
17743
12864
0,1
80,7
30,2
9
16
Bu
riti
s0
0360
33
100
0100
246015
13703
11340
6092
0,4
40,5
40,4
9
17
Carm
oP
ara
naib
a0
0360
14
100
0100
239120
49940
18592
12195
0,2
40,6
60,3
6
18
Cu
rvel
o0
0360
0100
065
237144
32499
13316
8134
0,2
50,6
10,3
6
19
Lagam
ar
00
360
43
100
0100
239604
38237
24031
16351
0,4
30,6
80,5
3
20
Man
huacu
00
360
0100
092
232804
71162
32936
25439
0,3
60,7
70,4
9
21
Mari
an
a0
0360
26
100
0100
240075
41388
28060
17642
0,4
30,6
30,5
1
22
Mir
ap
ora
nga
00
360
26
100
0100
251196
16296
10016
6128
0,3
80,6
10,4
7
23
Monte
Carm
elo
00
360
0100
065
239590
40783
15604
11434
0,2
80,7
30,4
1
24
Mora
da
Nova
00
360
11
100
0100
242048
28460
11308
6697
0,2
40,5
90,3
4
25
Morr
od
aG
arc
a0
0360
26
100
0100
215748
12771
7166
4564
0,3
60,6
40,4
6
26
Pato
sd
eM
inas
00
360
18
100
0100
237650
20128
7432
5656
0,2
80,7
60,4
1
27
Pre
sid
.O
legari
o0
0360
13
100
0100
240099
20666
11658
6398
0,3
10,5
50,4
0
28
Rau
lS
oare
s0
0360
0100
081
210672
40307
26073
17647
0,4
40,6
80,5
3
29
Ser
raS
elad
a0
0360
20
100
0100
215760
34714
20893
12686
0,3
70,6
10,4
6
30
Ser
ro0
0360
23
100
0100
242554
28677
17743
10214
0,3
60,5
80,4
4
Tab
ela
3:R
esul
tado
sob
tido
sco
mo
uso
doM
etod
opr
opos
tona
Seca
o5.
6.

53
7 Interpretacao dos Resultados,Conclusoes e Recomendacoes
7.1 Avaliacao das questoes-teste da hipotese
O metodo apresentado nesta dissertacao esta fudamentado no Metodo Hipotetico-
Dedutivo de (POPPER, 2000) que possui em sua base a elaboracao de hipoteses e sua
refutacao ou corroboracao por meio de tentativas de falseamento. A partir da combinacao
dos dados coletados com os resultados adquiridos ao final de cada etapa do diagrama
apresentado na Secao 5.6, foi possıvel estabelecer um vınculo entre esses dados e a hipotese
formulada na Secao 5.1, a fim de realizar uma tentativa de falsear as respectivas questoes
testes dessa hipotese. Desse modo, nesta dissertacao, a hipotese apresentada sera plausıvel
se a sua questao chave for validada por meio de todas as questoes-teste. Abaixo, seguem
as avaliacoes pertinentes a essas questoes.
Hipotese
Se, independente do modelo de cor utilizado, os resultados apresentados nao sao to-
talmente satisfatorios por nao apresentarem uma segmentacao perfeita, entao o que pode
comprometer os resultados e a consistencia da cor do geo-objeto apresentado e/ou a con-
centracao de variados geo-objetos ao longo da carta topografica utilizada.
Questao chave
A consistencia da cor do geo-objeto curva de nıvel e a concentracao de variados tipos
de objetos em um mesmo espaco do documento sao as unicas responsaveis por determinar
a qualidade do processo de segmentacao?

54
Questao-teste 1
A consistencia da cor da curva de nıvel interfere no processo de segmentacao pro-
duzindo melhores ou piores resultados independente do modelo de cor utilizado?
Independente do modelo de cor utilizado no processo de segmentacao, os resultados
alcancados serao diferenciados em funcao da consistencia da cor que representa o geo-
objeto segmentado. Apesar do geo-objeto curva de nıvel possuir a cor marrom como
padrao para sua representacao, nas 15 cartas selecionadas, todas possuem um tom diferen-
te da referida cor. Isso pode ser observado na Tabela 2, apresentada no Capıtulo anterior.
Nos experimentos realizados, cada carta obteve uma faixa de limiares diferente quando o
processo de segmentacao alcancou a maior media harmonica. Nesse caso, se os limiares
fossem os mesmos para cada modelo de cor, seria possıvel concluir que, independente dessa
consistencia, cada modelo reconheceria a cor marrom como unica e nao por seus tons, o
que nao e verdade. Entretanto, as condicoes relativas ao resultado no que se referem a
melhores ou piores respostas de segmentacao em funcao dos modelos de cores utilizados,
observa-se que o modelo RGB apresenta uma estabilidade das medias harmonicas ao
longo de uma determinada faixa do Limiar, ou seja, dada a classificacao ordenada de
fraca para forte consistencia da cor, a maior media obtida para uma determinada carta
mantem-se inalterada ao longo de uma faixa do limiar. Entretanto, isso nao acontece
quando o modelo HSV e empregado para as mesmas cartas. Esse comportamento pode
ser melhor compreendido por meio dos graficos da Fig. 17. Observe na ilustracao (a) que
a linha de tendencia que define o percurso evolutivo dos tamanhos dos intervalos mantem-
se relativamente constante, ao contrario da ilustracao (b) que representa os intervalos de
estabilidade das medias harmonicas do modelo HSV. Portanto, e possıvel concluir que,
inicialmente, a consistencia da cor interfere no processo de segmentacao.
Questao-teste 2
A classificacao da carta (definida pelo nıvel de presenca de variedades de geo-objetos)
interfere no processo de segmentacao produzindo melhores ou piores resultados indepen-
dente do modelo de cor utilizado?
Existe uma forte relacao, nao necessariamente de causa e efeito, entre a concentracao
de elementos em uma carta topografica colorida e os resultado do processo de segmentacao.
Cada carta topografica utilizada obteve um resultado diferente, inclusive em cada modelo

55
(a) Grafico apresentando o comportamento da estabilidade da media harmonica nas cartas topograficas como uso do modelo RGB
(b) Grafico apresentando o comportamento da estabilidade da media harmonica nas cartas topograficas como uso do modelo HSV
Figura 17: Grafico contendo o comportamento da estabilidade das medias ao longo do pro-cesso de segmentacao das cartas topograficas coloridas. Observe a linha de tendencia tracadademonstrando o percurso evolutivo dessa estabilidade. Para a ilustracao (a), a linha mantem-seequilibrada na horizontal demonstrando a estabilidade. Na ilustracao (b) a linha de tendenciamantem-se ascendente desde o inıcio do percurso.

56
Classificacao das cartas e as medias harmonicas obtidas para cada modelo de cor
item Carta topografica Concentracao
de elementos
Caracterıs-
tica Con-
sistencia da
Cor
Media
Harmonica
RGB
(maior
valor
obtido)
Media
Harmonica
HSV
(maior
valor
obtido)
Estabili-
dade RGB
(Tamanho
do inter-
valo de
limiares)
Estabili-
dade RGB
(Tamanho
do inter-
valo de
limiares)
1 Patos de Minas Baixa Fraca-media 0,30 0,41 1 3
2 Presid. Olegario Baixa-media Fraca-media 0,26 0,40 2 2
3 Carmo Paranaıba Baixa-media Fraca-media 0,29 0,36 8 1
4 Morada Nova Baixa-media Media 0,24 0,34 16 2
5 Manhuacu Media Media 0,34 0,49 1 5
6 Serro Media-alta Media 0,29 0,44 5 2
7 Morro da Garca Media Media-forte 0,16 0,46 10 5
8 Raul Soares Media Media-forte 0,30 0,53 6 3
9 Curvelo Media-alta Media-forte 0,27 0,36 7 1
10 Monte Carmelo Media-alta Media-forte 0,27 0,41 9 9
11 Miraporanga Media-alta Media-forte 0,28 0,47 5 2
12 Mariana Media-alta Media-forte 0,35 0,51 6 3
13 Lagamar Alta Media-forte 0,18 0,53 5 1
14 Buritis Alta Media-forte 0,28 0,49 4 5
15 Serra Selada Alta Forte 0,18 0,46 5 2
Tabela 4: A definicao do Limiar adequado a segmentacao do geo-objeto curva de nıvel foiidentificado por meio das maiores Medias Harmonicas obtidas junto aos modelos de cores RGB eHSV empregados nas 15 cartas topograficas coloridas. A 7a e 8a colunas da Tabela 4 apresentamessas medias e o tamanho do intervalo em que essas medias se mantiveram ao longo do processode segmentacao utilizando os dois modelos.
de cor utilizado.
Na Tabela 4 a seis primeiras colunas apresentam, respectivamente, as cartas utilizadas,
a classificacao dada a concentracao de elementos, a classificacao dada a consistencia da
cor atribuıda a curva de nıvel e as medias obtidas a partir do calculo da precisao e ac-
ertividade identificada. Observe que as cartas topograficas estao ordenadas em funcao da
concentracao de elementos e da consistencia da cor da curva de nıvel. Apesar dessa or-
denacao nao proporcionar uma facil avaliacao visual acerca do comportamento das medias
atribuıdas a cada classificacao, e possıvel identifica-las por meio dos graficos apresentados
nas ilustracoes (a) e (b) da Fig. 18. Esses graficos apresentam o comportamento das
medias harmonicas para cada tipo de modelo de cor durante o processo de segmentacao
das curvas de nıvel.
Observe a linha de tendencia tracada demonstrando o percurso evolutivo dessas
medias. Para a ilustracao (a), a linha de tendencia possui descendencia, o que demonstra
a instabilidade do modelo RGB ao tratar cartas topograficas com grande concentracao
de geo-objetos combinadas com cores mais escuras. Com um comportamento contrario,

57
(a) Grafico apresentando o comportamento das medias harmonicas obtidas pelo modelo RGB ao longo doprocesso de segmentacao.
(b) Grafico apresentando o comportamento das medias harmonicas obtidas pelo modelo HSV ao longo doprocesso de segmentacao.
Figura 18: Grafico contendo o comportamento das Medias Harmonicas ao longo do processode segmentacao das cartas topograficas coloridas.

58
a ilustracao (b), representando o modelo HSV, possui uma linha de tendencia ascen-
dente desde o inıcio, demonstrando um melhor desempenho para cartas topograficas com
alta concentracao de geo-objetos e combinadas com cores mais escuras. Portanto, a classi-
ficacao da carta interfere no processo de segmentacao, produzindo resultados diferenciados
para cada modelo de cor utilizado.
Questao-teste 3
Um modelo de cor pode se comportar melhor que o outro obtendo melhores resultados
no processo de segmentacao das curvas de nıvel em carta topografica colorida?
As medias harmonicas podem sinalizar um determinado comportamento em funcao
da concentracao de elementos e da consistencia das cores que representam as curvas de
nıvel. Apesar das linhas de tendencia tracadas nos graficos ilustrados nas Fig. 17 e
18 expressarem um comportamento diferente em cada modelo, e possıvel questionar se
essas medias realmente sao confiaveis ao ponto de permitir uma conclusao mais segura
sobre a qualidade dos modelos de cores no processo de segmentacao, da relevancia das
caracterısticas de concentracao dos geo-objetos e do impacto causado em detrimento da
consistencia da cor da curva de nıvel ao longo de uma carta topografica colorida. Contudo,
o uso do teste de diferenca entre as medias harmonicas de cada modelo de cor pode eliminar
duvidas sobre esse comportamento, uma vez que essas medias referem-se a dois modelos
de cores independentes. Nesse caso, para obtencao de uma analise mais segura, sera
empregado o metodo de Teste de Hipotese para verificar se o comportamento demonstrado
nos graficos ilustrados na Fig. 18 e compatıvel com os resultados obtidos pelo referido
metodo.
Nesse caso, o interesse do emprego desse teste e verificar se um modelo de cor con-
tribuiu na segmentacao de uma determinada carta ou de um conjunto delas. Ou seja,
deseja-se verificar se a media obtida com um determinado modelo de cor e menor ou
maior que o outro modelo, permitindo identificar se um modelo possui a capacidade de
segmentar melhor que o outro em funcao de uma determinada classificacao da carta ou
da consistencia da cor. Portanto, para que possamos verificar esse comportamento, sera
aplicado um teste de diferenca entre medias populacionais para dados pareados, uma vez
que estamos tratando da mesma populacao, porem utilizando dois modelos de cores difer-
entes. Nesse caso, a partir dos valores apresentados nas colunas Media Harmonica RGB
e Media Harmonica HSV da Tabela 4, queremos verificar se a media atribuıda ao Modelo

59
RGB e menor do que a media do Modelo HSV. Para isso, a equacao 7.1 servira para a
definicao da hipoteses H0, que significa nao haver diferenca entre os Modelos de Cores
RGB e HSV no processo de segmentacao, ou seja, as medias dos dois modelos apos a
aplicacao do teste sao iguais.
H0 : µd = 0
onde µd = µRGB − µHSV
H1 : µd < 0
Entretanto, e necessario estabelecer um nıvel de confianca ou significancia a fim de
rejeitar a hipotese nula (H0), quando ela for verdadeira. Para este problema, este nıvel
foi definido em 5% (α = 0, 05 onde 1−α = 0, 975). Uma vez que a populacao e represen-
tada por 15 cartas topograficas, foi utilizada a variavel Tn−1 da distribuicao t de Student
(conforme a equacao 7.1).
Tn−1 =d
(Sd/√n)T15−1
(7.1)
Esse teste deve ser definido como um teste unilateral a esquerda (com 5% de sig-
nificancia), e a variavel de teste Tn−1 de 15 amostras permite definir um valor crıtico
(obtido da tabela da distribuicao t de Student) de 2,13. Portanto, para valores maiores
de -2,13 aceitaremos H0 (ou seja, o uso dos dois modelos independe do resultado obtido
no processo de segmentacao, dada que a diferenca entre as medias e nula).
d =
∑di
n(7.2)
No entanto, se Tn−1 for menor do que -2,13 rejeitaremos H0 (a media harmonica do
Modelo HSV aumentou demais em relacao a media harmonica do Modelo RGB para que
a diferenca seja devida apenas ao acaso). Vale ressaltar que ha uma chance de 5% de
que venhamos a rejeitar H0 sendo ela verdadeira. Procedendo aos calculos, a equacao 7.2
representa o calculo da media das medias harmonicas para cada modelo de cor, a equacao
7.3 calcula o valor da diferenca entre as medias e com o resultado dessas duas equacoes
e possıvel estabelecer o valor final de -8,42 por meio da equacao 7.1 a fim de rejeitar a
hipotese H0 a 5% de significancia.

60
sd =
√∑d2
i −[(∑di)
2 /n]
n− 1(7.3)
Portanto, conforme demonstrado na equacao 7.4, pelo Teste de Hipotese e possıvel
concluir com 95% de confianca (ou com uma chance de erro de 5%) que a utilizacao
do modelo HSV no processo de segmentacao de curvas de nıvel em cartas topograficas
coloridas classificadas com alta concentracao de elementos e com forte consistencia na cor
e mais eficaz que o modelo RGB.
¯Tn−1 = T9 = −8, 42 < Tn−1, crıtico = T9;0,05 = −T9;0,095 = −2, 13 (7.4)
7.2 Consideracoes Finais
De acordo com os dados apresentados na Tabela 3, O Modelo HSV se mostra mais
eficaz na segmentacao do geo-objeto curva de nıvel. E possıvel observar que os valores
obtidos na media harmonica sao maiores que aqueles alcancados pelo Modelo RGB. En-
tretanto, a regularidade com que se mantem essa media e inferior a regularidade das
medias obtidas pelo Modelo RGB. O grafico ilustrado na Fig. 19 apresenta como exemplo
a superioridade do Modelo HSV na segmentacao da carta topografica do Municıpio de
Raul Soares - MG. Observe no referido grafico que nas linhas tracadas ha uma parte mais
grossa que representa a area onde esta localizada a media harmonica. Nesses tracados, o
comprimento dessa linha e maior no tracado que representa o Modelo RGB. Vale ressaltar
que a linha que representa o Modelo HSV refere-se ao limiar alcancado com a manipulacao
do canal Saturation.
E importante observar alem de todos os resultados apresentados nesta dissertacao
que se o Modelo RGB possui uma descorrelacao entre suas cores primarias, dificultando
a identificacao de uma determinada cor de interesse, entao o modelo HSV seria a me-
lhor opcao para ser utilizado no processo de segmentacao, pois as componentes H, S e V
sao mais correlacionadas. Entretanto, o Modelo RGB, apesar de apresentar essa descor-
relacao, se combinado com metodos que permitem calcular a distancia entre seus canais
de cores tende a facilitar encontrar o geo-objeto curva de nıvel. Ou seja, o que define
a eficacia no processo de segmentacao utilizando o Modelo RGB e o algoritmo utilizado
como suporte para facilitar o reconhecimento de uma determinada cor de interesse, en-

61
Figura 19: Grafico demonstrando o comportamento dos Modelos RGB e HSV no processo desegmentacao das curvas de nıvel da carta topografica do Municıpio de Raul Soares - MG
quanto o que define a eficacia do Modelo HSV no processo de segmentacao sao os valores
que deverao ser estabelecidos nos canais H, S e V a fim de encontrar essa mesma cor.
Portanto, se nao houver um algoritmo que solucione o problema da descorrelacao dos
canais que compoem o Modelo de Cor RGB, independente do tipo da carta utilizada, o
Modelo HSV ira produzir melhores resultados no processo de segmentacao. Entao, especi-
ficamente nesse caso, a resposta corrobora a essa questao-teste. Caso contrario, os dois
serao igualmente adequados ao processo de segmentacao se desconsiderarmos a qualidade
da carta.
Alem disso, algumas cartas nao obtiveram resultados significativos quando segmen-
tadas utilizando o Modelo de Cor RGB. Especificamente as cartas topograficas do Mu-
nicıpio de Serra Selada - MG e do Municıpio de Lagamar - MG nao foram segmentadas
corretamente. Ambas foram classificadas como “Alta concentracao de elementos”e o algo-
ritmo empregado para reconhecer as cores que representam as curvas de nıvel nao logrou
sucesso. Entretanto, outra carta com a mesma classificacao, a do Municıpio de Buritis
- MG, obteve resultados diferentes. Sugere-se que a causa da disparidade dos resultados
entre as tres cartas com a mesma classificacao deve-se a forma como as curvas de nıvel
estao dispostas ao longo do documento cartografico. Observe nos fragmentos apresenta-

62
dos nas ilustracoes da Fig. 20 que ha notada diferenca entre os espacos entre as curvas
de nıvel da carta de Buritis e das demais. Nao obstante, a proximidade das curvas e o
baixo contraste desses elementos com o fundo da imagem causam uma grande confusao
na identificacao do que e ou nao o geo-objeto que se pretende segmentar. A prova disso
esta nas cartas de Serra Selada e Lagamar. Observe nas ilustracoes (d) e (f) da mesma
Figura, que o objeto segmentado foi todo o conjunto, ou seja, fundo e demais geo-objetos.
(a) Fragmento da carta to-pografica do Municıpio deSerra Selada - MG
(b) Fragmento da carta to-pografica do Municıpio deBuritis - MG
(c) Fragmento da carta to-pografica do Municıpio deLagamar - MG
(d) Fragmento da mesmaarea da carta de Serra Se-lada - MG segmentada peloModelo de Cor RGB
(e) Fragmento da mesmaarea da carta de Buritis -MG segmentada pelo Mo-delo de Cor RGB
(f) Fragmento da mesmaarea da carta de Lagamar- MG segmentada pelo Mo-delo de Cor RGB
Figura 20: Resultados obtidos com processo de segmentacao utilizando o Modelo de Cor RGB
Portanto, o Modelo HSV pode ser melhor utilizado pois permite encontrar o geo-objeto
de interesse sem a necessidade de combina-lo com outros metodos o que nao acontece com
o Modelo RGB. Entretanto, como as caracterısticas de consistencia do geo-objeto e de
concentracao de elementos nao podem ser separadas para uma avaliacao global da carta,
pois as duas fazem parte do mesmo documento, a decisao de qual modelo e o mais ade-
quado somente sera possıvel se houver alguma ferramenta que realize segmentacoes em
cartas topograficas coloridas e essa possuir a opcao de qual modelo utilizar.
Conforme estabelecido no inıcio desta Secao, a hipotese sera considerada plausıvel caso
todas as questoes chaves forem corroboradas por meio da validacao das questoes-teste.
Nesse caso, as questoes-testes 1, 2 e 3 foram corroboradas, concluındo que a hipotese de
que o que compromete os resultados da segmentacao e a consistencia da cor do geo-objeto

63
curva de nıvel e/ou a concentracao de variados geo-objetos ao longo da carta topografica
utilizada e plausıvel.
7.3 Limitacoes do metodo e recomendacoes
Nesta dissertacao, o uso do metodo apresentado na Secao 5.6 mostrou-se eficaz no
levantamento dos dados necessarios para a execucao do experimento. No entanto, a
pesquisa tem limitacoes que devem ser esclarecidas. Nao se pode garantir que os dados
obtidos reflitam a realidade devido a quantidade de pixels que compoem a curva de nıvel
da carta original e a quantidade de pixels contidos na imagem com o mesmo geo-objeto
vetorizado. A diferenca entre ambas e relativamente grande, se observarmos que para o
geo-objeto vetorizado basta um unico pixel de espessura para representa-lo, enquanto que
essa espessura e bem maior no objeto original. Portanto, existe um numero razoavel de
falsos-negativos nas imagens segmentadas. Ou seja, varios pixels que compoem as curvas
nao sao tratados como relevantes pois na operacao logica AND e o objeto vetorizado quem
determina quais sao os pixels comuns entre ele o geo-objeto original. Portanto, seria
recomendavel em trabalhos futuros o desenvolvimento de uma ferramenta que permita
filtrar (segmentar) de alguma forma os verdadeiros pixels que compoem a curva de nıvel
original, a fim de gerar uma nova imagem e essa ser usada na referida operacao logica.
Alem disso, e recomendavel como trabalhos futuros uma forma de automatizar o processo
de qualificacao das cartas topograficas propostas por (GRIFFITH, 1983). O processo,
apesar de se mostrar eficaz, e bastante oneroso, pois a quantidade de quadrıculas existentes
em uma unica carta e bastante elevada, gerando um trabalho dispendioso e obviamente
propenso a erros. Portanto, um metodo que permita localizar as referidas quadrıculas,
e identificar, selecionar, segmentar e contabilizar a quantidade de geo-objetos existentes
ness,e espaco pode trazer uma eficiencia consideravel no processo de classificacao de cartas
topograficas.
No mais, espera-se ter podido contribuir com as comunidades academica e cientıfica
na expansao do conhecimento cientıfico e para o desenvolvimento do segmento de solucoes
no processamento digital de imagens, principalmente na segmentacao de geo-objetos em
documentos cartograficos coloridos.

64
Referencias
ARRIGHI, P.; SOILLE, P. From scanned topographic maps to digital elevation models.In: International Symposium on Imaging Applications in Geology. [S.l.]: Reprinted fromthe Proceedings of Geovision 99, 1999. p. 1.
BHATIA, P. K. Computer Graphics. 2. ed. [S.l.]: I.k. International Pvt. Ltd, 2008. 400 p.ISBN 9788189866730.
CARTOGRAFIA., S. de Planejamento da Presidencia IBGE Diretoria de Geodesia e.Carta topografica de Manhuacu - MG - Brasil. Folha SF-23-X-B-III-4, MI-2476/4, escala1:50.000. 1979.
CHEN, H.; TANG, X.; YANG, Y. Recognition of contour line from scanned militarytopographic maps. IEEE International Conference on Information and Automation,ICIA 2008, p. 873–878, June 2008.
CHIANG, Y.-Y. et al. Automatic and accurate extraction of road intersections fromraster maps. Geoinformatica, Kluwer Academic Publishers, Hingham, MA, USA, v. 13,n. 2, p. 121–157, 2009. ISSN 1384-6175.
COFER, R. H.; TOU, J. T. Automated map reading and analysis by computer. In:AFIPS ’72 (Fall, part I): Proceedings of the December 5-7, 1972, fall joint computerconference, part I. New York, NY, USA: ACM, 1972. p. 135–145.
DUPONT, F.; DESEILLIGNY, M.; GONDRAN, M. DTM extraction from topographicmaps. IEEE Fifth International Conference on Document Analysis and Recognition -ICDAR ’99, p. 475–478, September 1999.
GOMES, J.; VELHO, L. Computacao Grafica: Imagens. 1. ed. Rio de Janeiro - RJ:IMPA / SBPM, 1994. 421 p. ISBN 85-244-0088-9.
GREENLEE, D. D. Raster and vector processing for scanned linework. Auto-Carto 8 -International Symposium on Computer-Assisted Cartography, v. 53, n. 10, p. 640–649,1987.
GRIFFITH, J. j. Analise dos recursos visuais do parque nacional do caparao. RevistaFloresta, v. 14, n. 2, p. 15 – 21, 1983.
IBGE. Avaliando os requisitos dos dados vetoriais para sig - conectividade, fechamentode poligonos e parametros de vetorizacao. In: IBGE - INSTITUTO BRASILEIRODE GEOGRAFIA E ESTATıSTICA - GEOCIeNCIAS - CARTOGRAFIA. Manualde Validacao da Vetorizacao. Brasılia, 2009. cap. Execucao da Validacao. Disponıvelem: <http://www.ibge.gov.br/home/geociencias% -/cartografia/validacao\ da\ vetori-.shtm>. Acesso em: 3 dez. 2009.

65
JAIN, A. K. Fundamentals of Digital Image Processing. 1. ed. Englewood Cliffs, NJ:Prentice-Hall Inc., 1989. 571 p. ISBN 0-13-336165-9.
KARIMA, M.; SADHAL, K. S.; MCNEIL, T. . From paper drawings to computer-aideddesign. IEEE Computer Graphics and Applications, v. 5, n. 2, p. 27–39, February 1985.
MARCU, G.; ABE, S. Color clusterization using modified hsl space. Fourth ColorImaging Conference: Color Science, Systems, and Applications Scottsdale, Arizona, p.151–155, November 1995.
DAVIS Jr., C. A. Geometria de triangulos e polıgonos. In: InfoGeo. [S.l.: s.n.], 2001.v. 3, n. 20, p. 26–28.
OLIVEIRA, C. de. Curso de Cartografia Moderna. 2. ed. Sao Paulo: IBGE, 1993. 152 p.
PEDRINI, H.; SCHWARTZ, W. R. Analise de Imagens Digitais : Princıpios,algoritmos e aplicacoes. 1. ed. Sao Paulo - SP: Thomson Learning, 2008. 508 p. ISBN978-85-221-0595-3.
POPPER, K. R. A Logica da Pesquisa Cientıfica. 6. ed. Sao Paulo, SP: Editora Cultrix,2000. 568 p. ISBN 8853160236x.
POUDEROUX, J.; SPINELLO, S. Global contour lines reconstruction in topographicmaps. IEEE Ninth International Conference on Document Analysis and Recognition -ICDAR 2007, n. 2, p. 779–783, September 2007.
RUSS, J. C. The Image Processing Handbook. 5. ed. [S.l.]: CRC Handbook Published inCooperation with IEEE Press, 2007. 817 p. ISBN 978-0849325168.
SALVATORE, S.; GUITTON, P. Contour line recognition from scanned topographicmaps. WSCG (Winter School of Computer Graphics), v. 12, n. 1-3, p. 627–637, feb 2003.Disponıvel em: <http://iparla.labri.fr/publications/2004/SG04>.