avaliaÇÃo da precisÃo de posicionamentos...
TRANSCRIPT

II Simpósio Brasileiro de Geomática Presidente Prudente - SP, 24-27 de julho de 2007
V Co ló qu i o B ra si l ei ro d e Ci ên ci a s Geo d ési ca s ISSN 1981-6251, p. 263-268
F. F. Ramos; D. D. Rodrigues; R. J. O. Andrade
AVALIAÇÃO DA PRECISÃO DE POSICIONAMENTOS POR INTERSEÇÃO ANGULAR A RÉ
FERNANDA FARIA RAMOS
DALTO DOMINGOS RODRIGUES RAFAEL JOSÉ DE OLIVEIRA ANDRADE
Universidade Federal de Viçosa - UFV
Centro de Ciências Exatas e Tecnológicas - CCE Departamento de Engenharia Civil, Viçosa - MG
{nanda_framos, rafaeljoaufv}@yahoo.com.br [email protected]
RESUMO - A técnica de Interseção Angular a Ré ou Recessão permite a determinação da posição de um ponto ocupado a partir de visadas a pontos conhecidos, com exceção se o ponto ocupado for colinear aos pontos de apoio ou estiver posicionado sobre a “circunferência perigosa”. Essa técnica é aplicada em topografia, fotogrametria e outras áreas correlatas. As literaturas disponíveis não avaliam a precisão da posição nem a elipse dos erros quando há observações redundantes nem divulgam as derivadas parciais que permitem a propagação de variâncias quando não há observações redundantes. O presente trabalho obteve e analisou a precisão de posicionamentos por Interseção Angular a Ré com e sem observações redundantes. O estudo empregou a fórmula de Tienstra e o Método dos Mínimos Quadrados. Os cálculos estão em função de posições (e precisões) fictícias pré-estabelecidas simulando a realidade quanto a configuração geométrica dos pontos visados. Os resultados obtidos revelaram que o método com observações redundantes fornece posição com maior confiabilidade que o uso da fórmula de Tienstra na Interseção Angular a Ré. O melhor resultado para o problema é obtido quando o ponto ocupado está dentro da circunferência perigosa e do triangulo formado pelos pontos de apoio. ABSTRACT - The technique of resection determine the position of an unknown accessible point P by its bearings from known points. This technique is applied in surveying, photogrammetry and other areas. Available literatures do not evaluate the precision of the position nor the error ellipse when it has redundant observations. The present paper analyzed the precision of positionings for resection with and without redundant observations. Were used formulas of Tienstra and the Least Square Method. The results had disclosed that the method with redundant observations supplies position with bigger trustworthiness that the use of formulas of Tienstra. The best one resulted for the problem is gotten when the occupied point is inside of the polygon formed by fixed points.
1 INTRODUÇÃO
Topografia é uma ciência aplicada, baseada na geometria e na trigonometria, de âmbito restrito, que tem como objetivo estudar a forma, dimensão e a posição relativa de uma porção limitada da superfície terrestre, sem levar em conta a esfericidade da Terra. ESPARTEL, (1987).
Partindo-se do conceito que a topografia é considerada um caso particular da Geografia, pode-se afirmar que os métodos planimétricos, com fins de levantamento, implantação ou posicionamento, devem ser encarados sumariamente como aplicações da geometria plana.
A planimetria estuda e estabelece os procedimentos e métodos de medida, no plano horizontal, de distâncias e ângulos, e a conseqüente determinação de coordenadas planas (X,Y) de pontos de interesse.
O método planimétrico de interseção angular a ré, também chamado de Problema de Pothenot ou Problemas dos Três Pontos, é um dos métodos para a determinação planimétrica de pontos, mediante observações angulares feitas destes e dirigidas a outros pontos de coordenadas conhecidas (geralmente vértices geodésicos). É necessário fazer no mínimo três visadas em pontos de coordenas conhecidas, segundo PEÑA, (2002).
As bibliografias encontradas que fazem o estudo do método da interseção angular a ré não avaliam a precisão e a elipse dos erros, daí vem a necessidade de se
II Simpósio Brasileiro de Geomática Presidente Prudente - SP, 24-27 de julho de 2007
V Colóquio Brasileiro de Ciências Geodésicas
F. F. Ramos; D. D. Rodrigues; R. J. O. Andrade
fazer um estudo mais detalhado a fim de comparar as precisões quando se utiliza ou não observações redundantes.
Além das comparações quanto ao número de observações, serão comparadas quatro posições diferentes, do ponto incógnita (ponto P), em relação à circunferência perigosa, que é a circunferência que contém os três pontos de apoio, ou seja, a circunferência que passa pelos três pontos de apoio.
2 OBJETIVO
O Objetivo deste trabalho é avaliar a precisão de posicionamentos por interseção angular a ré, fazendo comparações dessas precisões, com e sem utilização de observações redundantes, para diferentes posições do ponto a ser determinado.
3 REVISÃO BIBLIOGRÁFICA
Neste tópico serão apresentados resumos da revisão bibliográfica realizada nos seguintes assuntos: lei de propagação de covariâncias, método dos mínimos quadrados, equações de Tienstra e elipse dos erros.
3.1 Lei de Propagação das Covariâncias
A lei de propagação das covariâncias consiste numa fórmula que expressa a relação entre as covariâncias das medidas e as covariâncias das quantidades derivadas, SILVA, (2003).
Na propagação, as covariâncias dos elementos observados se propagam às grandezas derivadas por meio do modelo funcional que relaciona as observações com os parâmetros a serem estimados.
A fórmula que expressa a relação entre as covariâncias das observações e as dos parâmetros é denominada ‘fórmula de propagação das covariâncias’ ou, em termos clássicos, ‘lei de propagação dos erros’. 3.2 Equações de Tienstra
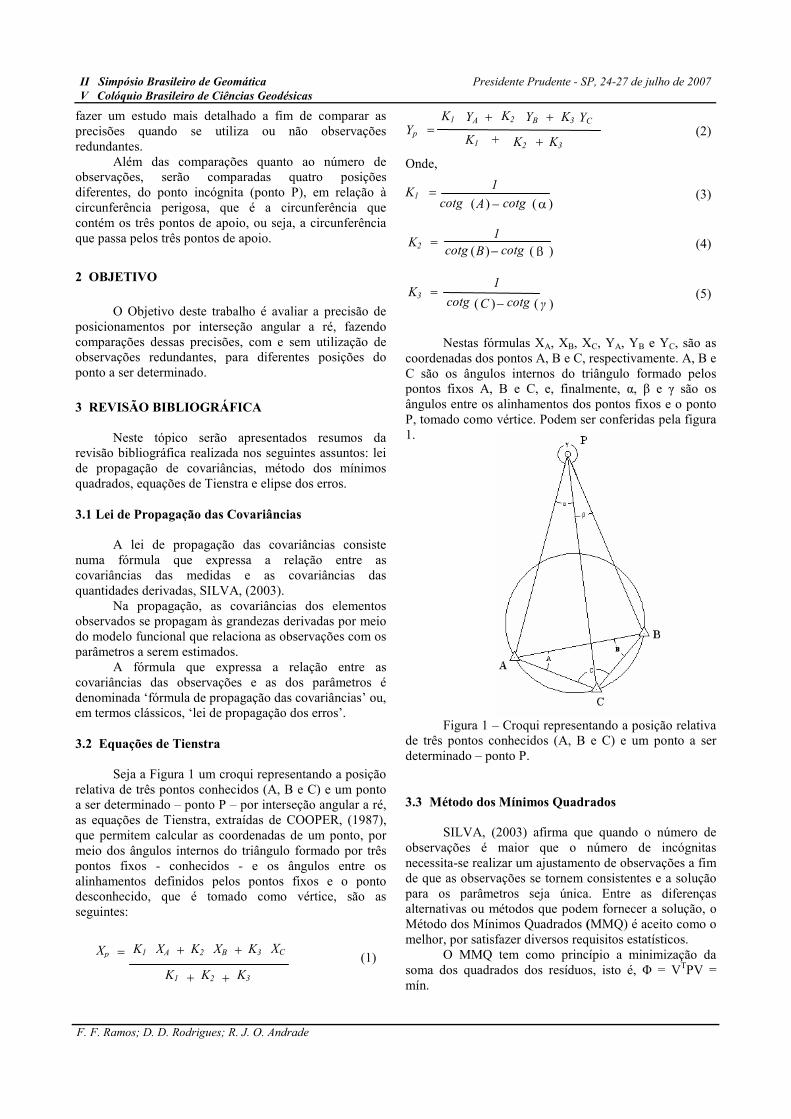
Seja a Figura 1 um croqui representando a posição relativa de três pontos conhecidos (A, B e C) e um ponto a ser determinado – ponto P – por interseção angular a ré, as equações de Tienstra, extraídas de COOPER, (1987), que permitem calcular as coordenadas de um ponto, por meio dos ângulos internos do triângulo formado por três pontos fixos - conhecidos - e os ângulos entre os alinhamentos definidos pelos pontos fixos e o ponto desconhecido, que é tomado como vértice, são as seguintes:
(1)
(2)
Onde,
(3)
(4)
(5)
Nestas fórmulas XA, XB, XC, YA, YB e YC, são as
coordenadas dos pontos A, B e C, respectivamente. A, B e C são os ângulos internos do triângulo formado pelos pontos fixos A, B e C, e, finalmente, α, β e γ são os ângulos entre os alinhamentos dos pontos fixos e o ponto P, tomado como vértice. Podem ser conferidas pela figura 1.
Figura 1 – Croqui representando a posição relativa
de três pontos conhecidos (A, B e C) e um ponto a ser determinado – ponto P.
3.3 Método dos Mínimos Quadrados
SILVA, (2003) afirma que quando o número de observações é maior que o número de incógnitas necessita-se realizar um ajustamento de observações a fim de que as observações se tornem consistentes e a solução para os parâmetros seja única. Entre as diferenças alternativas ou métodos que podem fornecer a solução, o Método dos Mínimos Quadrados (MMQ) é aceito como o melhor, por satisfazer diversos requisitos estatísticos.
O MMQ tem como princípio a minimização da soma dos quadrados dos resíduos, isto é, Φ = VTPV = mín.
= K3 1
− ( ) C ( cotg γ )
cotg
= K2 1
− ( ) B ( )β cotg cotg
= K1 1
−
( ) A ( )cotg α cotg
= Yp + + K1 YA K2 YB K3
+ K1 + K2 K3
YC
= Xp + + K1 XA K2 XB K3 XC
+ + K1 K2 K3
II Simpósio Brasileiro de Geomática Presidente Prudente - SP, 24-27 de julho de 2007
V Colóquio Brasileiro de Ciências Geodésicas
F. F. Ramos; D. D. Rodrigues; R. J. O. Andrade
3.2 Método Paramétrico
Segundo SILVA, (2004) no ajustamento de observações denominam-se parâmetros (ou observações indiretas) as grandezas que em geral não são obtidas diretamente, ou seja, aquelas que são calculadas em função das grandezas obtidas diretamente. As coordenadas são exemplos típicos de parâmetros.
Para aplicar o MMQ com a finalidade de estimar o valor dos parâmetros, utiliza-se o Método Paramétrico. Para a aplicação desse método é necessária montar as equações de observações, que são modelos matemáticos relacionando parâmetros e observações.
Após o processamento do ajustamento são obtidos os valores ajustados dos parâmetros assim como as observações ajustadas e a matriz das covariâncias dos parâmetros.
4 MATERIAIS E MÉTODOS
Segundo SILVA, (2004) no ajustamento de observações denominam-se parâmetros (ou observações indiretas) as grandezas que em geral não são obtidas diretamente, ou seja, aquelas que são calculadas em função das grandezas obtidas diretamente. As coordenadas são exemplos típicos de parâmetros.
4.1 Lei de Propagação das Covariâncias
O material utilizado foi um micro computador Pentium e os softwares AutoCad, versão 2006, Maple versão 7.0 e Microsoft Excel versão 2003.
4.2 Metodologia
A metodologia adotada foi dividida em três partes: simulação das situações experimentais, cálculos e desenho das elipses dos erros. As situações simuladas visaram representar as mais diferentes prováveis situações em um possível posicionamento por interseção a ré. Os cálculos foram realizados de duas maneiras para cada situação experimental: sem e com observações redundantes.
4.2.1 Simulação das situações experimentais
Inicialmente foram pré-estabelecidas oito situações
variando a posição do ponto desconhecido. Para os cálculos foram empregados dois métodos: as fórmulas de Tienstra para os casos que não havia observações redundantes e o MMQ para as situações com observações redundantes.
As situações estudadas foram materializadas graficamente no Software AutoCAD obtendo a configuração geométrica desejada (a partir de comandos de criação e edição de pontos, linhas e polígonos) e
extraindo do software as coordenadas dos pontos conhecidos, os ângulos internos, os ângulos observados e as coordenadas aproximadas do ponto a ser determinado.
Na Figura 1 os ângulos α, β e γ são os ângulos formados entre as direções determinadas pelo vértice – ponto P - e os pontos de apoio A, B e C. Os ângulos A, B e C são os ângulos internos do triângulo que têm como vértices os pontos A, B e C.
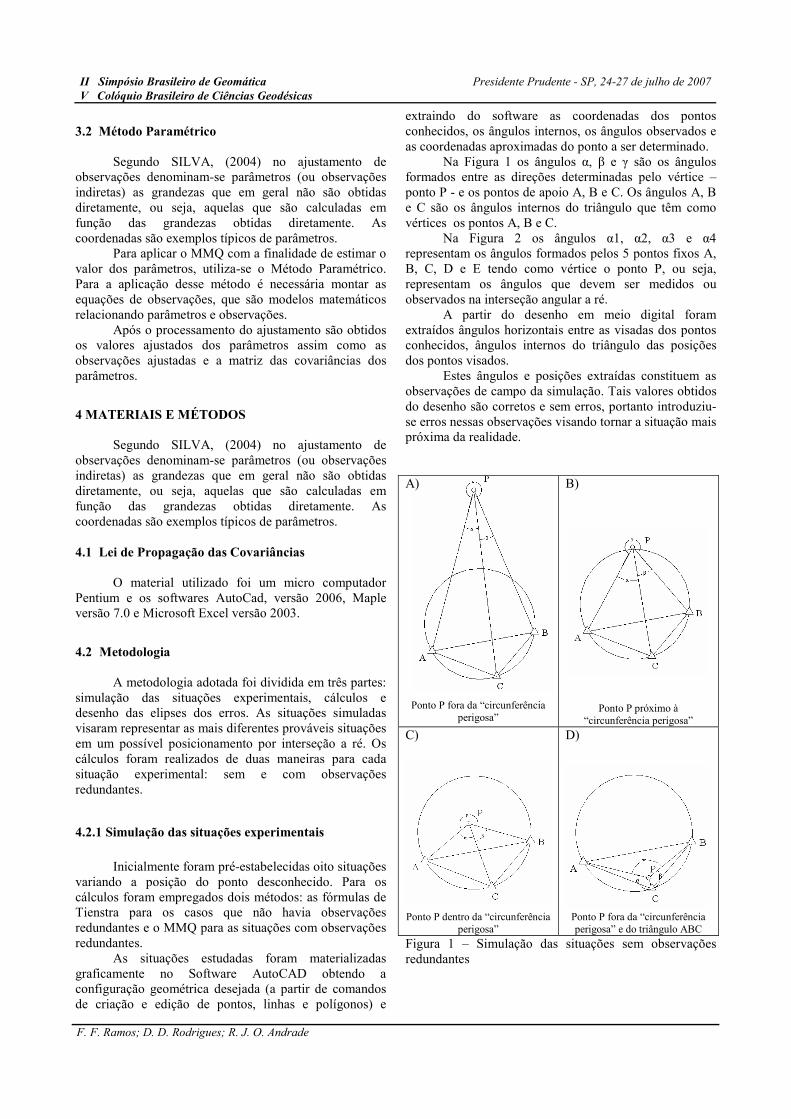
Na Figura 2 os ângulos α1, α2, α3 e α4 representam os ângulos formados pelos 5 pontos fixos A, B, C, D e E tendo como vértice o ponto P, ou seja, representam os ângulos que devem ser medidos ou observados na interseção angular a ré.
A partir do desenho em meio digital foram extraídos ângulos horizontais entre as visadas dos pontos conhecidos, ângulos internos do triângulo das posições dos pontos visados.
Estes ângulos e posições extraídas constituem as observações de campo da simulação. Tais valores obtidos do desenho são corretos e sem erros, portanto introduziu-se erros nessas observações visando tornar a situação mais próxima da realidade.
A)
Ponto P fora da “circunferência perigosa”
B)
Ponto P próximo à
“circunferência perigosa”
C) Ponto P dentro da “circunferência
perigosa”
D) Ponto P fora da “circunferência perigosa” e do triângulo ABC
Figura 1 – Simulação das situações sem observações redundantes
II Simpósio Brasileiro de Geomática Presidente Prudente - SP, 24-27 de julho de 2007
V Colóquio Brasileiro de Ciências Geodésicas
F. F. Ramos; D. D. Rodrigues; R. J. O. Andrade
B)
A)
Ponto P afastado dos pontos de apoio
B)
Ponto P próximo aos pontos de apoio
C)
– Ponto P no alinhamento dos pontos de apoio E e D
D)
Ponto P dentro do polígono formado pelos pontos de apoio
Figura 2 – Simulação das situações com observações redundantes
A partir do desenho em meio digital foram extraídos ângulos horizontais entre as visadas dos pontos conhecidos, ângulos internos do triângulo das posições dos pontos visados.
Estes ângulos e posições extraídas constituem as observações de campo da simulação. Tais valores obtidos do desenho são corretos e sem erros, portanto introduziu-se erros nessas observações visando tornar a situação mais próxima da realidade.
4.2.2 Cálculos
As fórmulas dos cálculos foram implementadas em forma de comandos no software Maple utilizando variáveis, que permitiram, de forma rápida, variar os valores de entrada e obter os resultados.
Para a primeira estratégia, não utilizando observações redundantes, foram acrescentados erros nas observações e foram adotados desvios padrão semelhantes para todas as situações da Figura 1.
Para a segunda estratégia os cálculos utilizando o MMQ – método paramétrico – foi atribuído um erro e um desvio padrão para cada observação da Figura 2. Para as coordenadas aproximadas, também foi atribuído um erro.
Para os cálculos dos elementos das elipses dos erros utilizou-se o software Microsoft Excel 2003. O
Nível de Confiança (NC) utilizado para os cálculos foi de 95%.
Com os resultados dos cálculos em mãos as elipses foram desenhadas no software Autocad 2006 utilizando os comandos de edição e construção. Para o desenho das elipses utilizou a escala mais conveniente para melhor visualização. 5 RESULTADOS E DISCUSSÕES
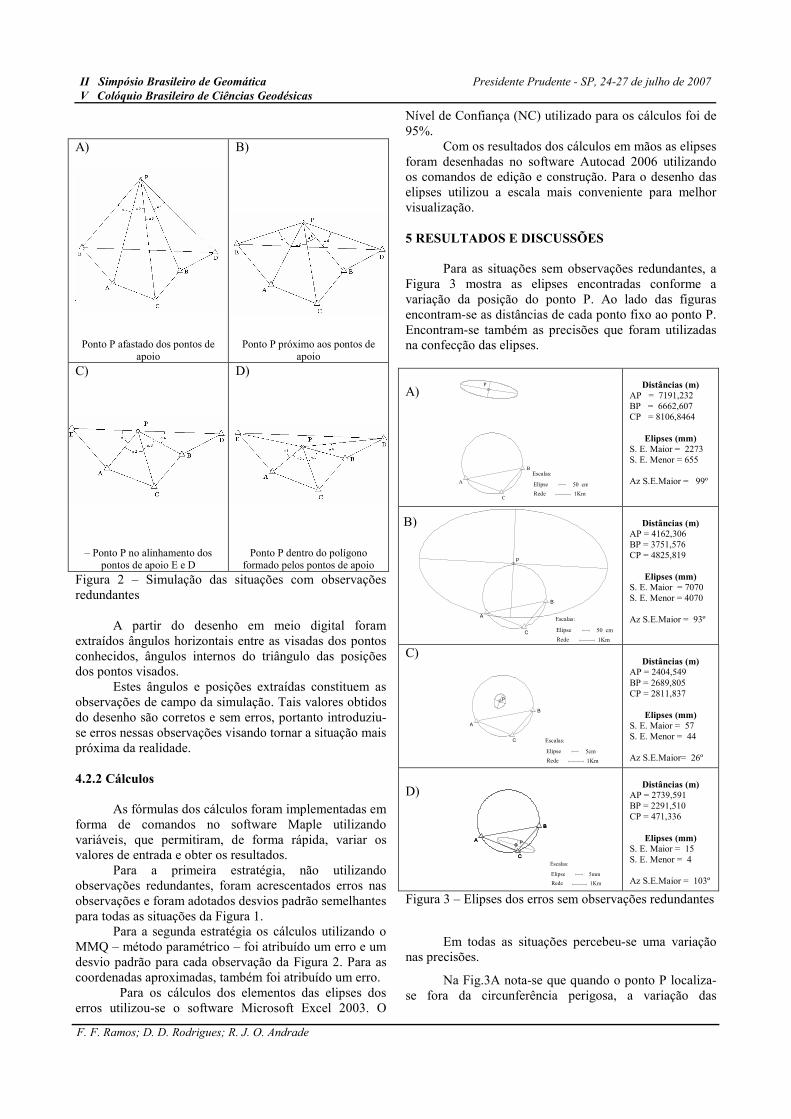
Para as situações sem observações redundantes, a Figura 3 mostra as elipses encontradas conforme a variação da posição do ponto P. Ao lado das figuras encontram-se as distâncias de cada ponto fixo ao ponto P. Encontram-se também as precisões que foram utilizadas na confecção das elipses.
A)
Distâncias (m)
AP = 7191,232 BP = 6662,607 CP = 8106,8464
Elipses (mm) S. E. Maior = 2273 S. E. Menor = 655 Az S.E.Maior = 99º
Distâncias (m)
AP = 4162,306 BP = 3751,576 CP = 4825,819
Elipses (mm) S. E. Maior = 7070 S. E. Menor = 4070 Az S.E.Maior = 93º
C)
Distâncias (m)
AP = 2404,549 BP = 2689,805 CP = 2811,837
Elipses (mm) S. E. Maior = 57 S. E. Menor = 44 Az S.E.Maior= 26º
D)
Distâncias (m)
AP = 2739,591 BP = 2291,510 CP = 471,336
Elipses (mm) S. E. Maior = 15 S. E. Menor = 4 Az S.E.Maior = 103º
Figura 3 – Elipses dos erros sem observações redundantes
Em todas as situações percebeu-se uma variação nas precisões.
Na Fig.3A nota-se que quando o ponto P localiza-se fora da circunferência perigosa, a variação das
A
B
C
P
Escalas:
Rede
Elipse 50 cm
1Km
A
B
C
P
Escalas:
Rede
Elipse 50 cm
1Km
A
B
C
P
Escalas:
Rede
Elipse 5cm
1Km
A
B
C
A
B
C
A
B
C
P
Escalas:
Rede
Elipse 5mm
1Km
II Simpósio Brasileiro de Geomática Presidente Prudente - SP, 24-27 de julho de 2007
V Colóquio Brasileiro de Ciências Geodésicas
F. F. Ramos; D. D. Rodrigues; R. J. O. Andrade
Escalas:
Rede
Elipse 5cm
1Km
A
B
C
P
D
E
A
B
C
P
D
E
A
B
C
P
D
E
A
B
C
P
D
E
A
B
C
D
E
A
B
C
P
Escalas:
Rede
Elipse 5cm
1Km
A
B
C
P
A
B
C
D
E
A
B
C
Escalas:
Rede
Elipse 5cm
1Km
A
B
C
P
A
B
C
D
E
A
B
C
Escalas:
Rede
Elipse 5cm
1Km
precisões tende a diminuir a medida que P afasta-se da circunferência perigosa.
Na Fig 3B pode ser observado uma expressiva alteração nas precisões da elipse. Com o ponto P sobre a circunferência o resultado não pode ser solucionado, essa situação mostrou que a proximidade do ponto P a circunferência perigosa, tende realmente a tal conclusão.
Na Fig. 3C observa-se um aumento expressivo das precisões. A geometria que envolve os pontos fixos e o ponto P, fez com que a elipse se tornasse muito menor.
Na Fig. 3D temos a situação próxima ao ideal. Podemos observar que as distorções são bem pequenas. Uma vez que a situação ideal é a similaridade entre os ângulos, obtém-se um resultado satisfatório quando se consegue chegar próximo a esta situação.
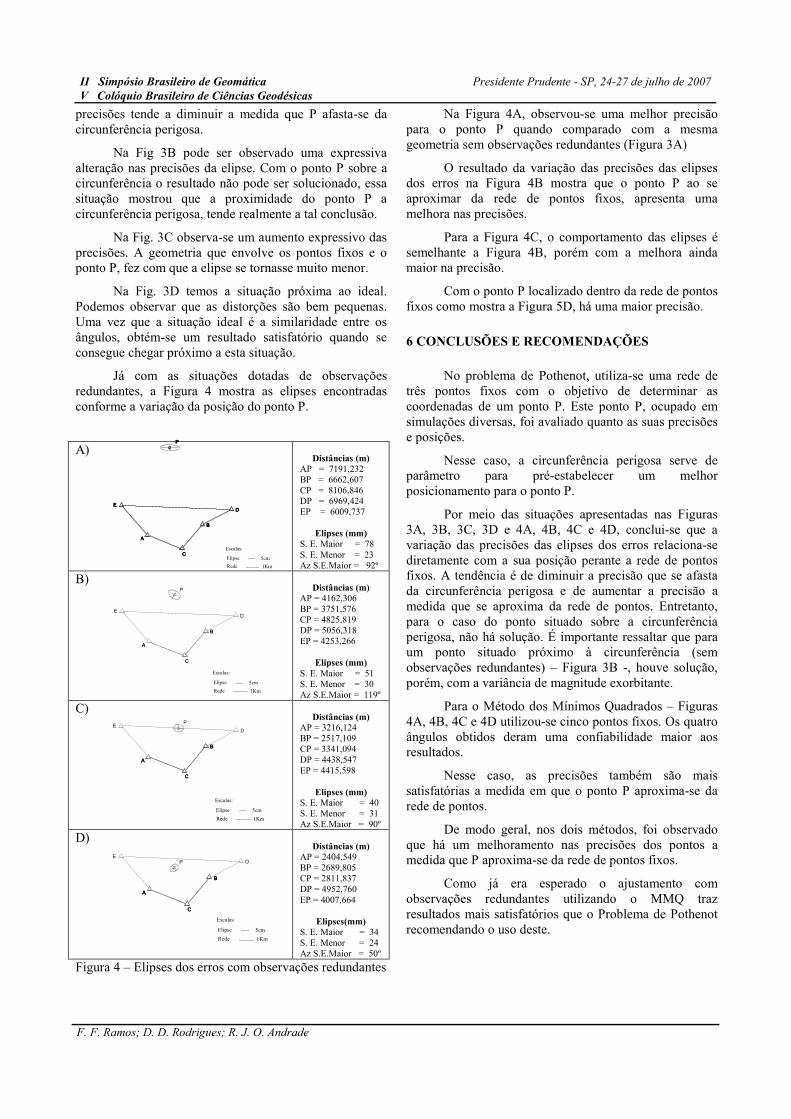
Já com as situações dotadas de observações redundantes, a Figura 4 mostra as elipses encontradas conforme a variação da posição do ponto P.
A)
Distâncias (m)
AP = 7191,232 BP = 6662,607 CP = 8106,846 DP = 6969,424 EP = 6009,737
Elipses (mm) S. E. Maior = 78 S. E. Menor = 23 Az S.E.Maior = 92º
B)
Distâncias (m)
AP = 4162,306 BP = 3751,576 CP = 4825,819 DP = 5056,318 EP = 4253,266
Elipses (mm) S. E. Maior = 51 S. E. Menor = 30 Az S.E.Maior = 119º
C)
Distâncias (m)
AP = 3216,124 BP = 2517,109 CP = 3341,094 DP = 4438,547 EP = 4415,598
Elipses (mm) S. E. Maior = 40 S. E. Menor = 31 Az S.E.Maior = 90º
D)
Distâncias (m)
AP = 2404,549 BP = 2689,805 CP = 2811,837 DP = 4952,760 EP = 4007,664
Elipses(mm)
S. E. Maior = 34 S. E. Menor = 24 Az S.E.Maior = 50º
Figura 4 – Elipses dos erros com observações redundantes
Na Figura 4A, observou-se uma melhor precisão para o ponto P quando comparado com a mesma geometria sem observações redundantes (Figura 3A)
O resultado da variação das precisões das elipses dos erros na Figura 4B mostra que o ponto P ao se aproximar da rede de pontos fixos, apresenta uma melhora nas precisões.
Para a Figura 4C, o comportamento das elipses é semelhante a Figura 4B, porém com a melhora ainda maior na precisão.
Com o ponto P localizado dentro da rede de pontos fixos como mostra a Figura 5D, há uma maior precisão.
6 CONCLUSÕES E RECOMENDAÇÕES
No problema de Pothenot, utiliza-se uma rede de três pontos fixos com o objetivo de determinar as coordenadas de um ponto P. Este ponto P, ocupado em simulações diversas, foi avaliado quanto as suas precisões e posições.
Nesse caso, a circunferência perigosa serve de parâmetro para pré-estabelecer um melhor posicionamento para o ponto P.
Por meio das situações apresentadas nas Figuras 3A, 3B, 3C, 3D e 4A, 4B, 4C e 4D, conclui-se que a variação das precisões das elipses dos erros relaciona-se diretamente com a sua posição perante a rede de pontos fixos. A tendência é de diminuir a precisão que se afasta da circunferência perigosa e de aumentar a precisão a medida que se aproxima da rede de pontos. Entretanto, para o caso do ponto situado sobre a circunferência perigosa, não há solução. É importante ressaltar que para um ponto situado próximo à circunferência (sem observações redundantes) – Figura 3B -, houve solução, porém, com a variância de magnitude exorbitante.
Para o Método dos Mínimos Quadrados – Figuras 4A, 4B, 4C e 4D utilizou-se cinco pontos fixos. Os quatro ângulos obtidos deram uma confiabilidade maior aos resultados.
Nesse caso, as precisões também são mais satisfatórias a medida em que o ponto P aproxima-se da rede de pontos.
De modo geral, nos dois métodos, foi observado que há um melhoramento nas precisões dos pontos a medida que P aproxima-se da rede de pontos fixos.
Como já era esperado o ajustamento com observações redundantes utilizando o MMQ traz resultados mais satisfatórios que o Problema de Pothenot recomendando o uso deste.
II Simpósio Brasileiro de Geomática Presidente Prudente - SP, 24-27 de julho de 2007
V Colóquio Brasileiro de Ciências Geodésicas
F. F. Ramos; D. D. Rodrigues; R. J. O. Andrade
7 REFERÊNCIAS
ESPARTEL, L. Curso de Topografia. 9ª ed. Rio de Janeiro: Globo. 1987. 655p.
COOPER, M. A. R. Control surveys in civil engineering, London: Collins, 1987.
PEÑA, J. S. LA INTERSECCIÓN INVERSA: MÉTODO GEOMÉTRICO, TOPOGRÁFICO Y CARTOGRÁFICO. XIV Congreso Internacional de Ingeniería Gráfica, Santander, España – 5-7 junio de 2002
RODRIGUES, D. D.: Técnicas Topográficas para posicionamento planimétrico, com avaliação da precisão, Notas de aula, Universidade Federal de Viçosa, edição do autor, 2004.
SILVA, A.S.: Ajustamento pelo Método dos Mínimos Quadrados em Ciências Geodésicas, Curso de Engenharia de Agrimensura, Departamento de Engenharia Civil da Universidade Federal de Viçosa, Viçosa - MG, 2003.