auvs: current trends and open challengesdee10008/papers/201306_talk_kth_jmelo.pdf · –700...
TRANSCRIPT

Investigação e Desenvolvimento Tecnológico | Transferência e Valorização de Tecnologia | Formação Avançada Consultoria | Pré-incubação de empresas de base tecnológica
Da
pro
du
ção
de
co
nh
eci
me
nto
à in
ova
ção
de
bas
e c
ien
tífi
ca
AUVs: Current trends and open challenges
José Melo Aníbal Matos, Bruno Ferreira, Nuno Abreu, Nuno Cruz, Rui Almeida Robotics and Intelligent Systems, INESC TEC Faculty of Engineering, University of Porto KTH| June 2013
KTH, June 2013 AUVs: Current trends and open challenges 2
Outline
• INESC TEC
• Robotics and Intelligent Systems @ INESC TEC
• Marine Robotics
• Ocean Systems Group: overview
• Projects
• Research
• Conclusion
KTH, June 2013 AUVs: Current trends and open challenges 3
INESC TEC: facts & figures
• R&D Institute working as an interface between academics and industry – ECE related areas
• Associate Laboratory since 2002, aggregates research groups from different higher education institutes – 700 researchers (~230 PhDs)
KTH, June 2013 AUVs: Current trends and open challenges 4
INESC TEC: facts & figures
• Associate Laboratory since 2002 – USE – Power Systems Unit
– UTM – Telecommunications and Multimedia Unit
– UOSE – Optoelectronics and Electronic Systems Unit
– UESP – Manufacturing Systems Engineering Unit
– USIG – Information and Computer Graphic Systems Unit
– ROBIS – Robotics and Intelligent Systems Unit
– UITT – Innovation and Technology Transfer Unit
– BRAIN - Biomedical Research and Innovation
– LIAAD – Laboratory of Artificial Intelligence and Decision Support
– CRACS – Center for Research in Advanced Computing Systems
– UGEI– Unit of Industrial Management and Engineering
– CISTER - Research Centre in Real-Time and Embedded Computing Systems
– HASLab – High-Assurance Software Laboratory
KTH, June 2013 AUVs: Current trends and open challenges 5
Robotics @ INESC TEC
• Team – 20 senior researchers, 25 PhD students, 2 tecnicians
– Students: ~15 graduate and ~12 undergraduate per year
• Budget > 1.5M€/year – National and European funded programs
– International contracts
• Facilities – Laboratories spanning > 1000 m2
– 2 test tanks
– Electronic and mechanical shops
KTH, June 2013 AUVs: Current trends and open challenges 6
Robotics @ INESC TEC
• Design and implementation of innovative solutions within the areas of land and water robotics, industrial robotics and intelligent systems.
• Fields of actuation – Security and Defense
– Environmental Monitoring and Mapping
– Search and Rescue
– Industrial and Service Robotics
– Process Automation
KTH, June 2013 AUVs: Current trends and open challenges 7
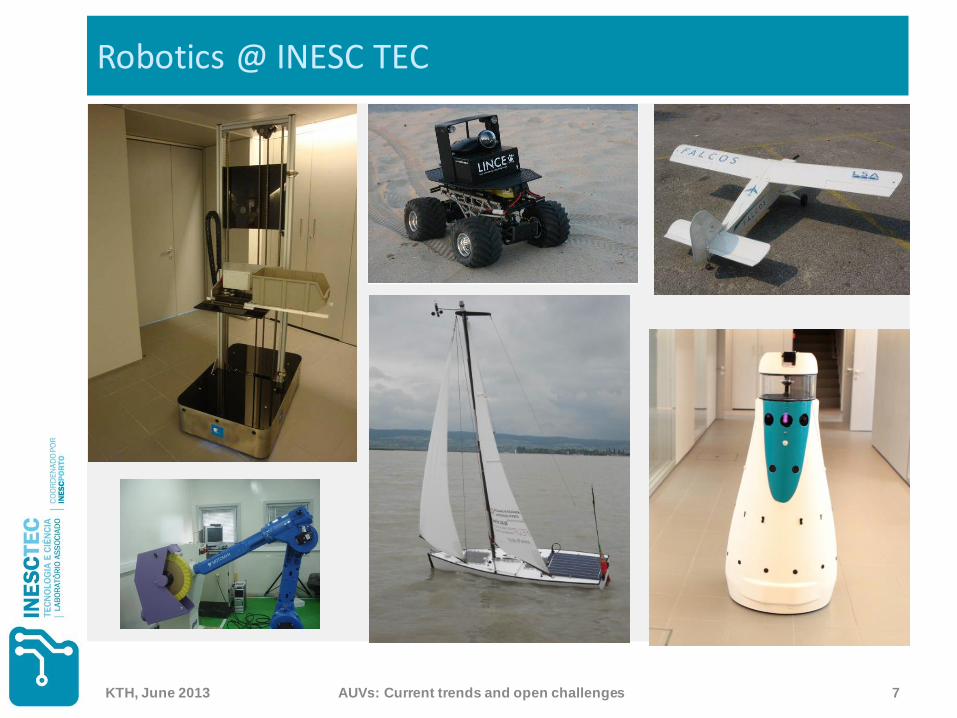
Robotics @ INESC TEC
KTH, June 2013 AUVs: Current trends and open challenges 8
Marine Robotics
• Why aquatic environments? – Large area: about 70% of the Earth surface
– amount of natural resources: oil, hydrocarbons, minerals…
– Important facilities: harbours, hydropower plants, …
• Increasing demand for efficient and effective technologies for underwater exploration and exploitation
• But underwater environments are highly hazardous – Pressure increases 1 atm / 10 meter
– salt water is highly corrosive
– Attenuation of electromagnetic waves
– Poor visibility conditions
KTH, June 2013 AUVs: Current trends and open challenges 9
Marine Robotics
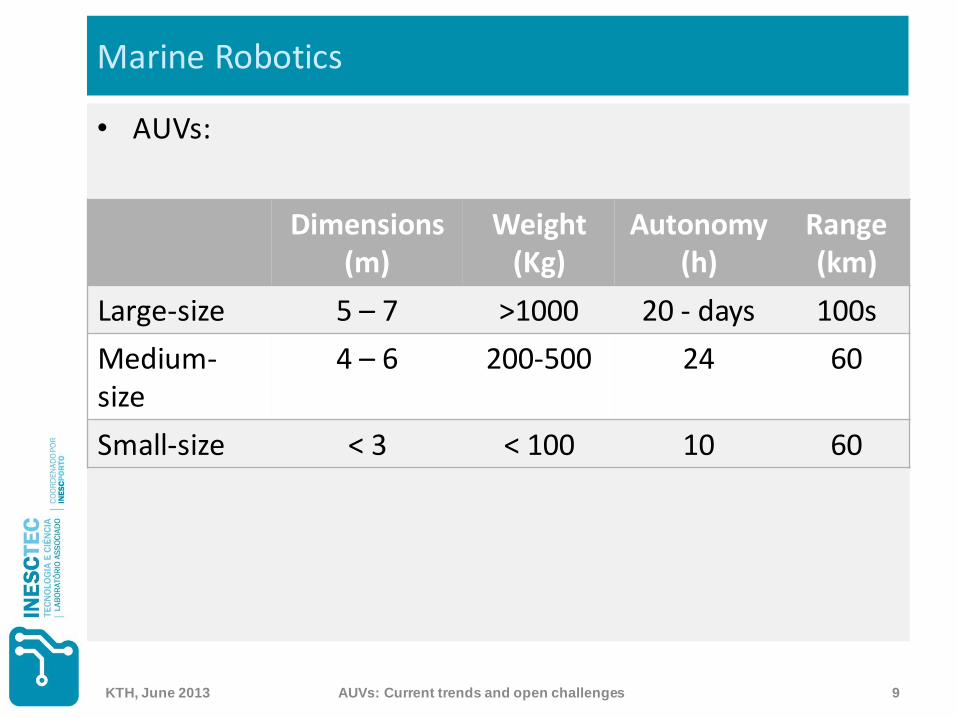
• AUVs:
Dimensions
(m) Weight
(Kg) Autonomy
(h) Range (km)
Large-size 5 – 7 >1000 20 - days 100s
Medium-size
4 – 6 200-500 24 60
Small-size < 3 < 100 10 60
KTH, June 2013 AUVs: Current trends and open challenges 10
Ocean Systems Group
• Highly motivated researchers, with over 15 years of experience – design, development and operation of robotic systems.
• Advanced systems for the automatic collection and processing of data in aquatic environments – AUVs, ASVs, ROVs or Gliders
– Increasing number of applications: monitoring, military, search and rescue, among others.
• Current research thrusts: – navigation and guidance
– control
– planning
– real time adaptive sampling with autonomous vehicles.
KTH, June 2013 AUVs: Current trends and open challenges 11
Ocean Systems Group
KTH, June 2013 AUVs: Current trends and open challenges 12
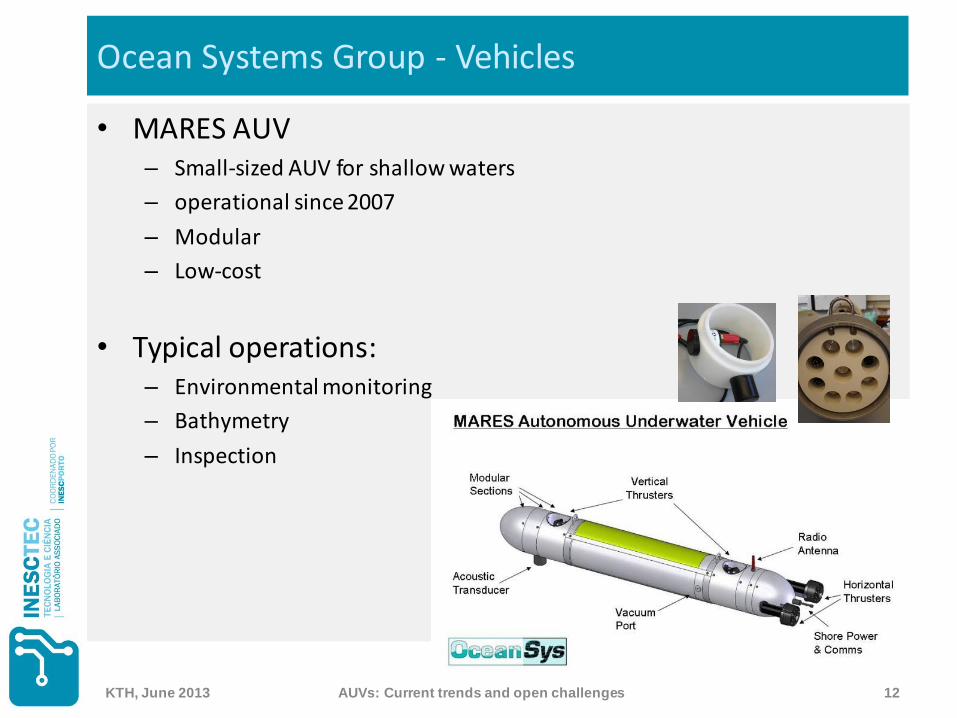
Ocean Systems Group - Vehicles
• MARES AUV – Small-sized AUV for shallow waters
– operational since 2007
– Modular
– Low-cost
• Typical operations: – Environmental monitoring
– Bathymetry
– Inspection
KTH, June 2013 AUVs: Current trends and open challenges 13
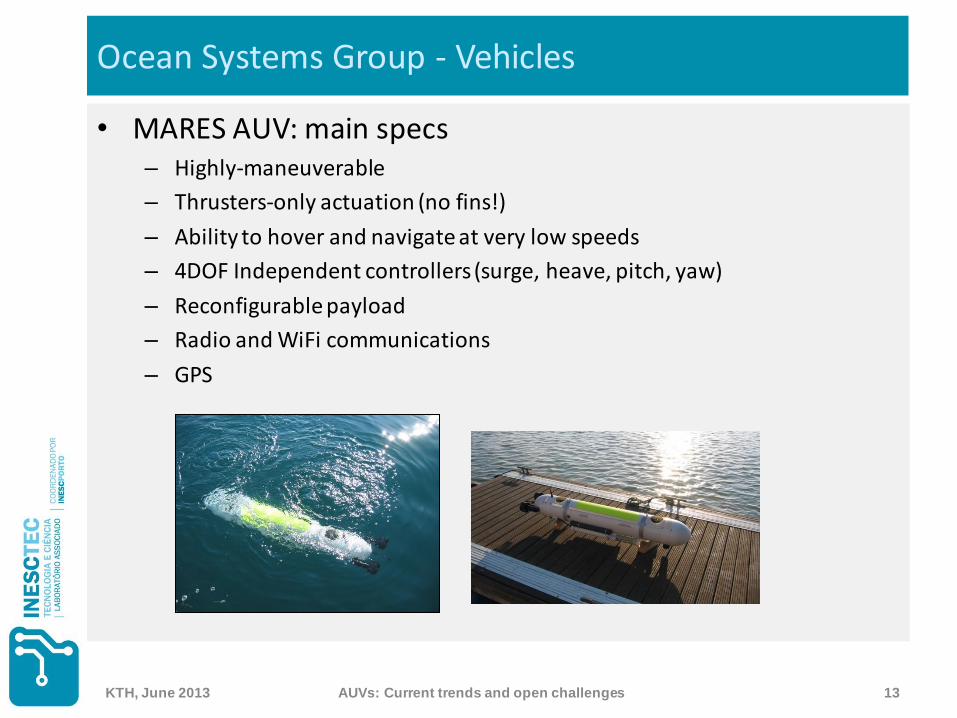
Ocean Systems Group - Vehicles
• MARES AUV: main specs – Highly-maneuverable
– Thrusters-only actuation (no fins!)
– Ability to hover and navigate at very low speeds
– 4DOF Independent controllers (surge, heave, pitch, yaw)
– Reconfigurable payload
– Radio and WiFi communications
– GPS
KTH, June 2013 AUVs: Current trends and open challenges 14
Ocean Systems Group - Vehicles
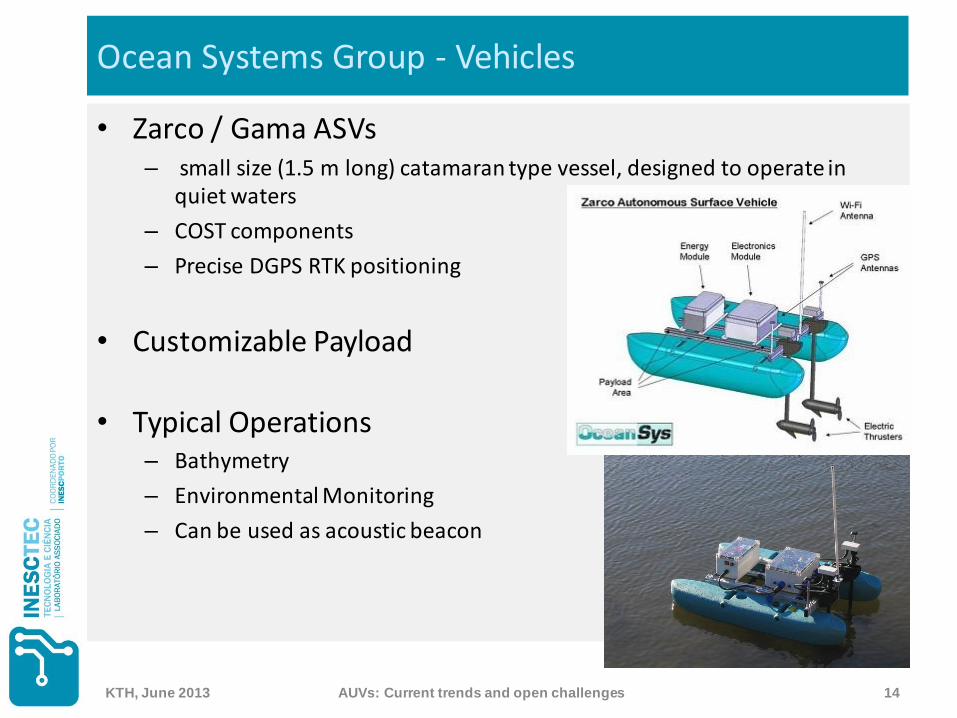
• Zarco / Gama ASVs – small size (1.5 m long) catamaran type vessel, designed to operate in
quiet waters
– COST components
– Precise DGPS RTK positioning
• Customizable Payload
• Typical Operations – Bathymetry
– Environmental Monitoring
– Can be used as acoustic beacon
KTH, June 2013 AUVs: Current trends and open challenges 15
Ocean Systems Group - Vehicles
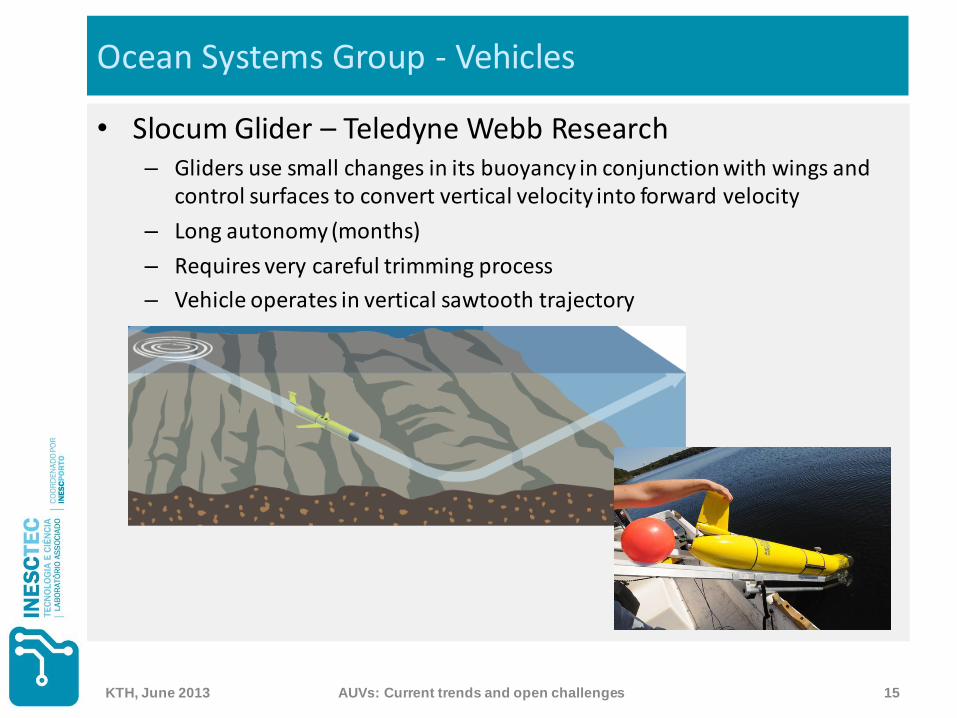
• Slocum Glider – Teledyne Webb Research – Gliders use small changes in its buoyancy in conjunction with wings and
control surfaces to convert vertical velocity into forward velocity
– Long autonomy (months)
– Requires very careful trimming process
– Vehicle operates in vertical sawtooth trajectory
KTH, June 2013 AUVs: Current trends and open challenges 16
Ocean Systems Group - Vehicles
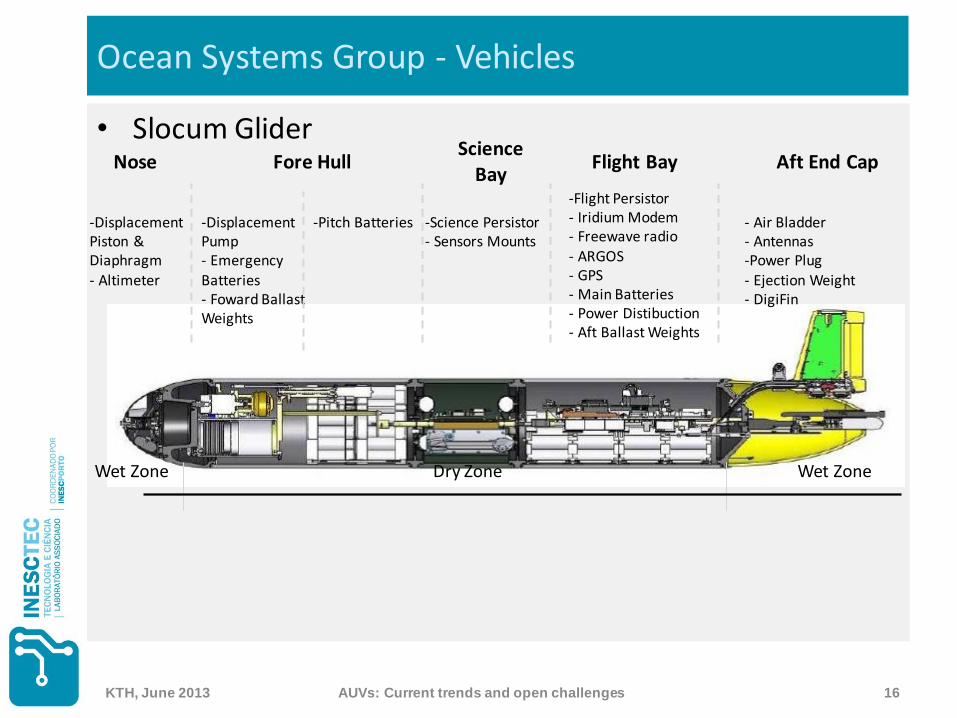
• Slocum Glider
Wet Zone Wet Zone Dry Zone
Nose Fore Hull
-Displacement Pump - Emergency
Batteries - Foward Ballast Weights
-Displacement Piston & Diaphragm
- Altimeter
-Science Persistor - Sensors Mounts
-Flight Persistor - Iridium Modem - Freewave radio
- ARGOS - GPS - Main Batteries - Power Distibuction - Aft Ballast Weights
Flight Bay
-Pitch Batteries
Aft End Cap
- Air Bladder - Antennas -Power Plug
- Ejection Weight - DigiFin
Science Bay
KTH, June 2013 AUVs: Current trends and open challenges 17
Projects: WWECO (2008 – 2011)
• Environmental Assessment and Modeling of Wastewater Discharges using Autonomous Underwater Vehicles Bio-optical Observations
• Adaptive sampling approach for the AUV based on the optical data collected in real time – environmental impact assessment
– detailed maps of effluent dispersion and spatial distribution of resuspended sediments and corrected estimates of plume dilution,
– accurate data for evaluating plume models.
• Automatic mission planning system – Several in-situ data collection campaigns
KTH, June 2013 AUVs: Current trends and open challenges 18
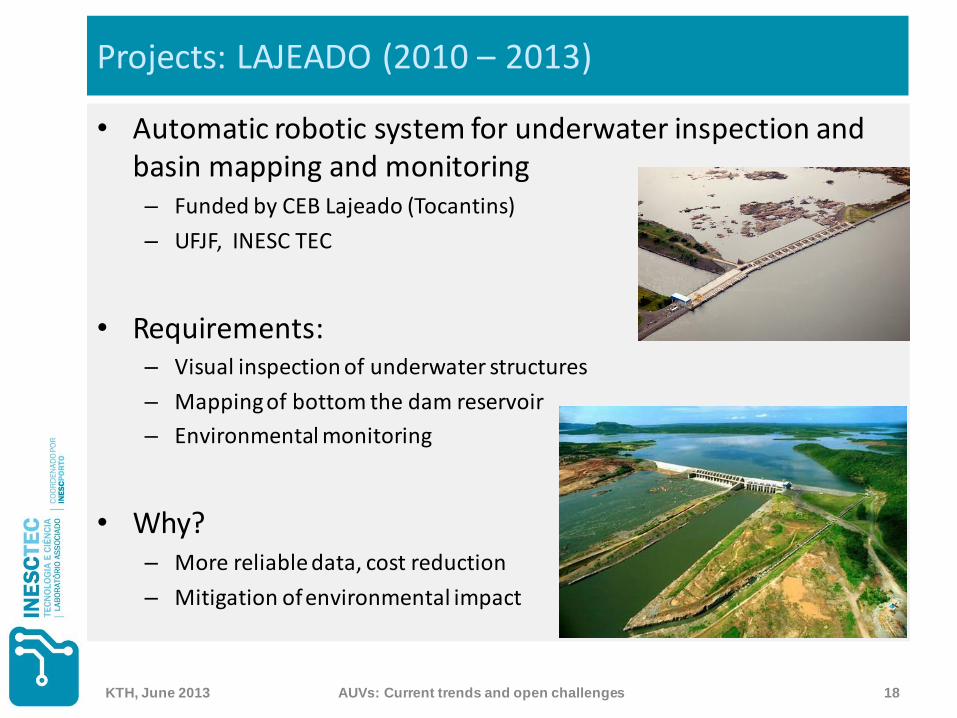
Projects: LAJEADO (2010 – 2013)
• Automatic robotic system for underwater inspection and basin mapping and monitoring – Funded by CEB Lajeado (Tocantins)
– UFJF, INESC TEC
• Requirements: – Visual inspection of underwater structures
– Mapping of bottom the dam reservoir
– Environmental monitoring
• Why? – More reliable data, cost reduction
– Mitigation of environmental impact
KTH, June 2013 AUVs: Current trends and open challenges 19
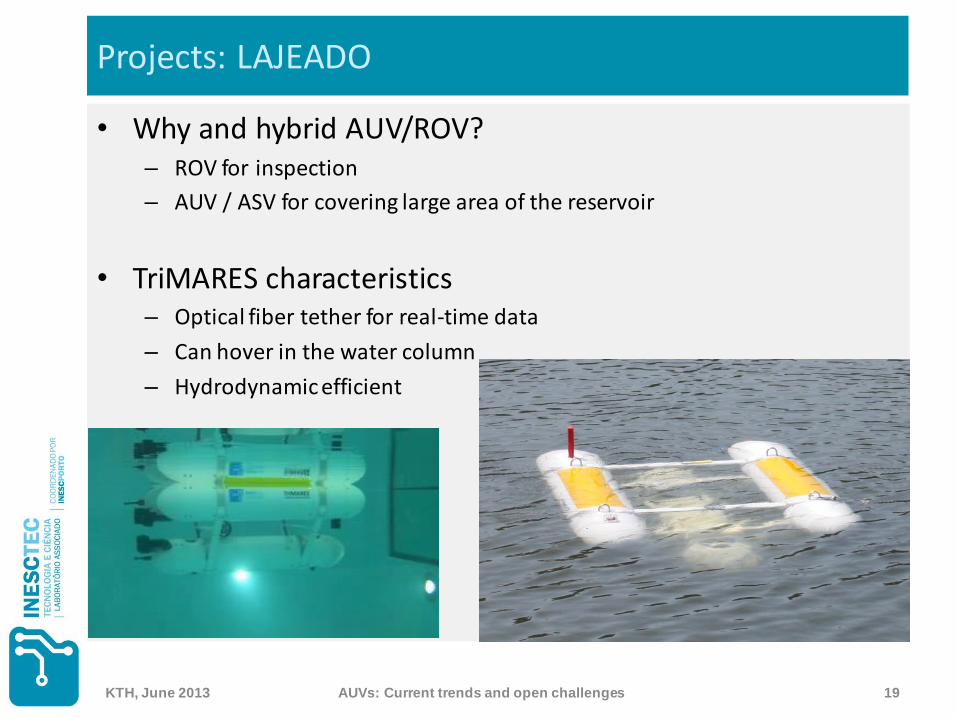
Projects: LAJEADO
• Why and hybrid AUV/ROV? – ROV for inspection
– AUV / ASV for covering large area of the reservoir
• TriMARES characteristics – Optical fiber tether for real-time data
– Can hover in the water column
– Hydrodynamic efficient
KTH, June 2013 AUVs: Current trends and open challenges 20
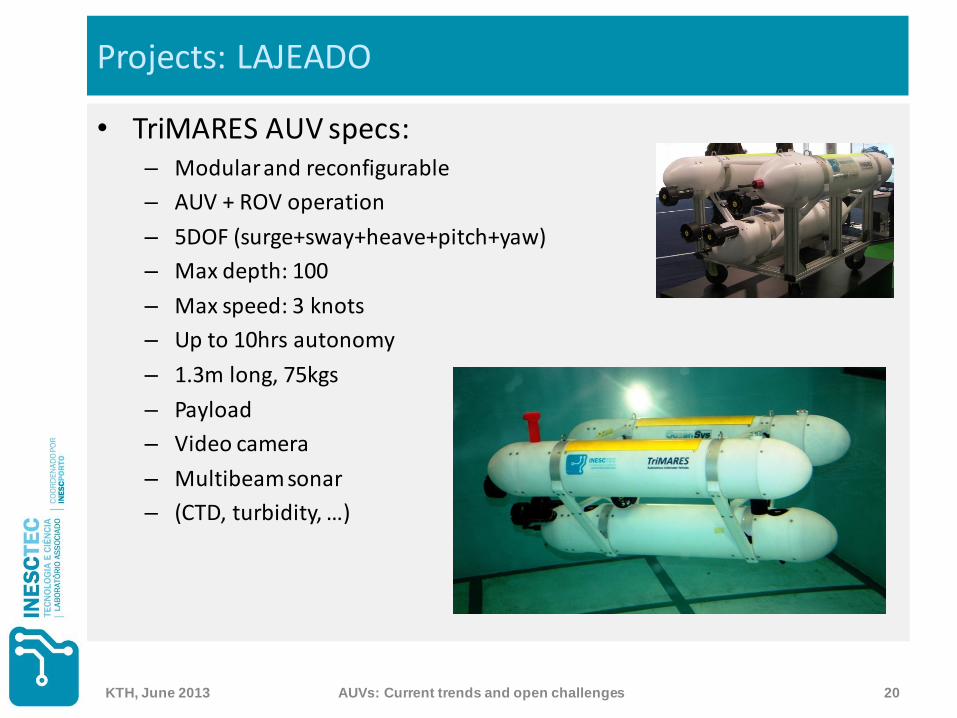
Projects: LAJEADO
• TriMARES AUV specs: – Modular and reconfigurable
– AUV + ROV operation
– 5DOF (surge+sway+heave+pitch+yaw)
– Max depth: 100
– Max speed: 3 knots
– Up to 10hrs autonomy
– 1.3m long, 75kgs
– Payload
– Video camera
– Multibeam sonar
– (CTD, turbidity, …)
KTH, June 2013 AUVs: Current trends and open challenges 21
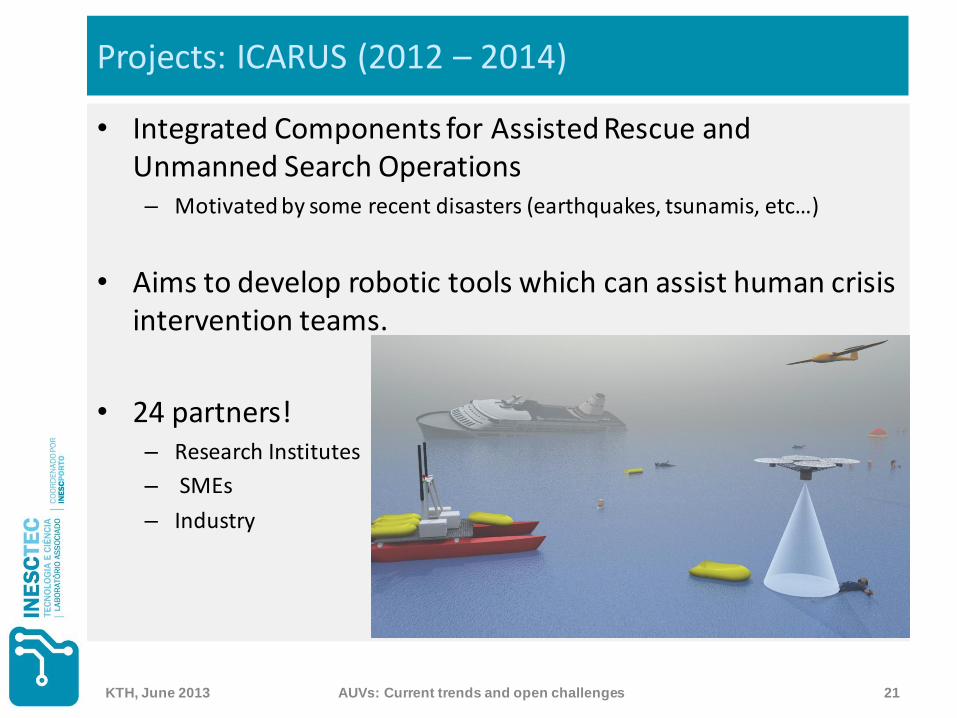
Projects: ICARUS (2012 – 2014)
• Integrated Components for Assisted Rescue and Unmanned Search Operations – Motivated by some recent disasters (earthquakes, tsunamis, etc…)
• Aims to develop robotic tools which can assist human crisis intervention teams.
• 24 partners! – Research Institutes
– SMEs
– Industry
KTH, June 2013 AUVs: Current trends and open challenges 22
Projects: ICARUS
• Development of cooperative Unmanned Surface Vehicle (USV) tools for unmanned SAR – Target detection and tracking.
– Mission planning and control (multiple vehicles)
– Capsule deployment system (life-rafts)
– INESC, Calzoni, CMRE, CINAV
• Collaboration between heterogeneous robotic SAR devices
• Integration of Unmanned SAR tools in the C4I systems of the Human Search And Rescue forces
• Development of a training and support system of the developed Unmanned SAR for the human SAR teams
KTH, June 2013 AUVs: Current trends and open challenges 23
Projects: COGNAT (2012 – 2014)
• Cooperative Glider Navigation and Acoustic Tomography – INESC, CINTAL
• Assess unknown environmental properties and predict the acoustic field in the area of the glider navigation, from hours to days
• Using the tomography data to improve the positioning accuracy of the glider.
KTH, June 2013 AUVs: Current trends and open challenges 24
Projects: other
• Increased autonomy for AUVs - Mission Planning and Obstacle Avoidance – Funding from EDA
– INESC, EDA, FFI, Saab underwater, AB, BWB, WASS
• Using AUVs in mine countermeasure operations – AUV mission (re)planning according to the vehicle and sensor
characteristics
KTH, June 2013 AUVs: Current trends and open challenges 25
On-going PhD thesis research:
• Bruno Ferreira – coordinated control of multiple vehicles
• Nuno Abreu: – Mission planning and re-planning under constraints
• José Melo – Guidance of AUVs according to natural features
– Terrain Based Navigation for AUVs
KTH, June 2013 AUVs: Current trends and open challenges 26
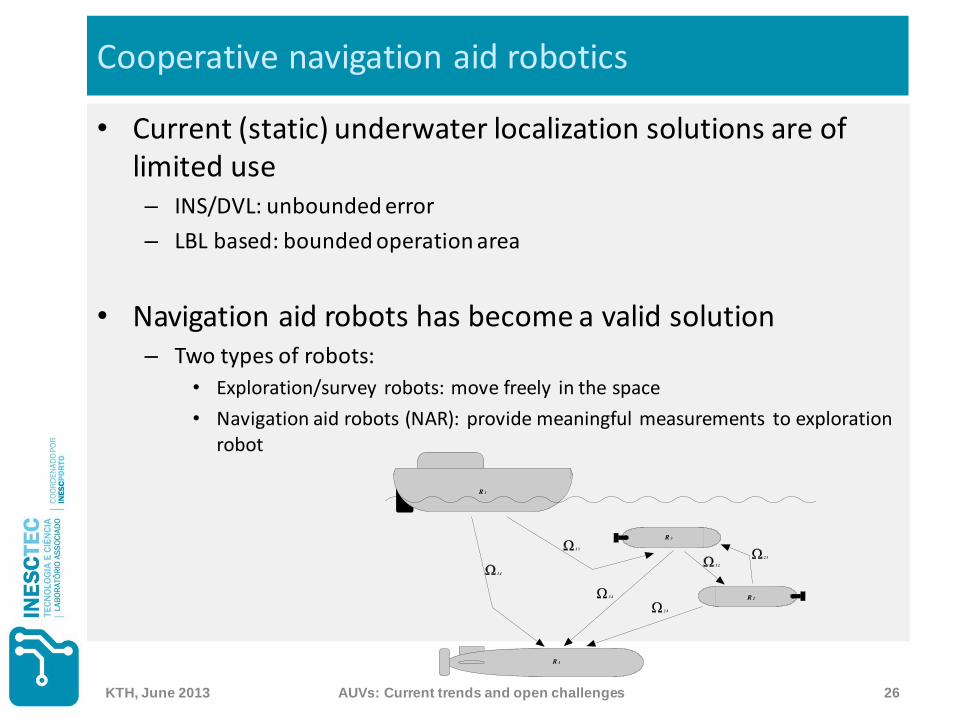
Cooperative navigation aid robotics
• Current (static) underwater localization solutions are of limited use – INS/DVL: unbounded error
– LBL based: bounded operation area
• Navigation aid robots has become a valid solution – Two types of robots:
• Exploration/survey robots: move freely in the space
• Navigation aid robots (NAR): provide meaningful measurements to exploration robot
KTH, June 2013 AUVs: Current trends and open challenges 27
Cooperative navigation aid robotics (2)
• Advantages – Moving beacons make it possible to improve the estimation
– Bounded error position estimates
– Measurements can be made at higher rates
– Combined EM-based and acoustic-based communications allow higher rates of communication than acoustic-based only
• Positioning of navigation aid robots is critical – Coherent motion must be ensured
– Formation-keeping and precision are desired in this approach
– Formation must be manipulated so that the localization of the survey robot is improved
KTH, June 2013 AUVs: Current trends and open challenges 28
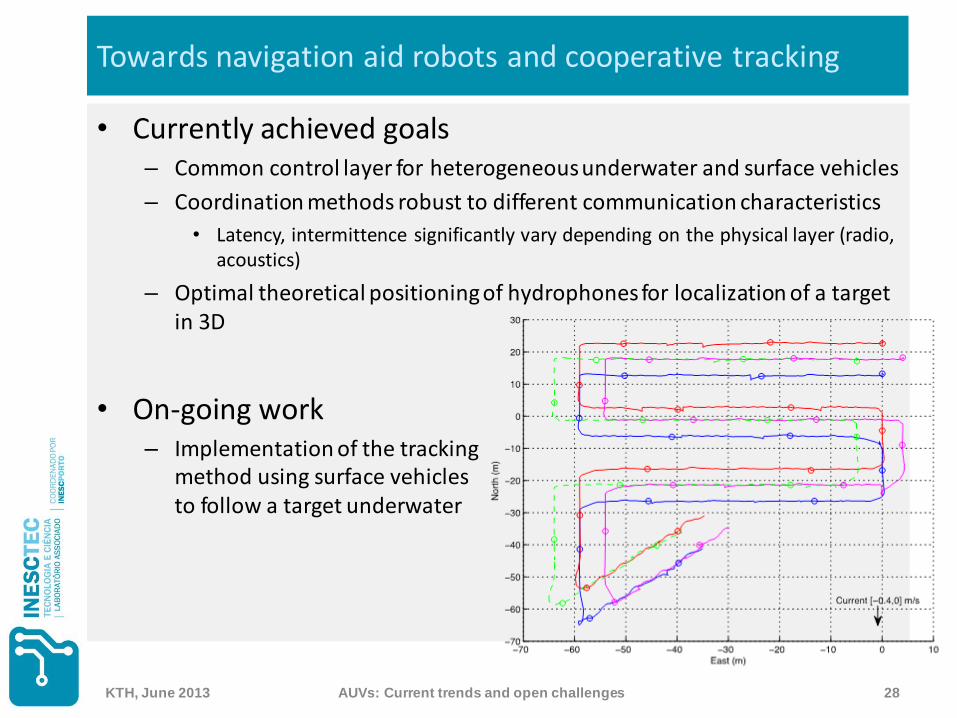
Towards navigation aid robots and cooperative tracking
• Currently achieved goals – Common control layer for heterogeneous underwater and surface vehicles
– Coordination methods robust to different communication characteristics
• Latency, intermittence significantly vary depending on the physical layer (radio, acoustics)
– Optimal theoretical positioning of hydrophones for localization of a target in 3D
• On-going work – Implementation of the tracking
method using surface vehicles to follow a target underwater
KTH, June 2013 AUVs: Current trends and open challenges 29
Planning minehunting operations with AUVs (1)
• Millions of naval mines have been deployed
• Even if the location of some minefields is known, it is too dangerous and expensive to try to dismantle them – MCM vessel + hull-mounted/towed sonar
• Mine hunting techniques that will enable AUVs to: – clandestinely survey a region in the sea for mines
– collect data that enables accurate mine detection
– map of the surveyed area
KTH, June 2013 AUVs: Current trends and open challenges 30
Planning minehunting operations with AUVs (2)
• Advantages – easily transported anywhere given its relatively small size
– low cost when comparing with other traditional MCM assets
– may be deployed in groups and achieve large area coverage in a smaller period of time
– can carry different sensor payloads (sonar, optical and magnetic sensors) according to the target mine they are trying to hunt
– considered expendable so they can operate in close proximity to mines
– they usually do not operate close to the surface, avoiding the related problems of acoustic propagation
– high maneuverability
– operate without risking human lives
• Mission planning involves – the calculation of the trajectories that the AUV will have to follow
– maximizing the quality of the acquired data
– prediction of the performance of the AUV
KTH, June 2013 AUVs: Current trends and open challenges 31
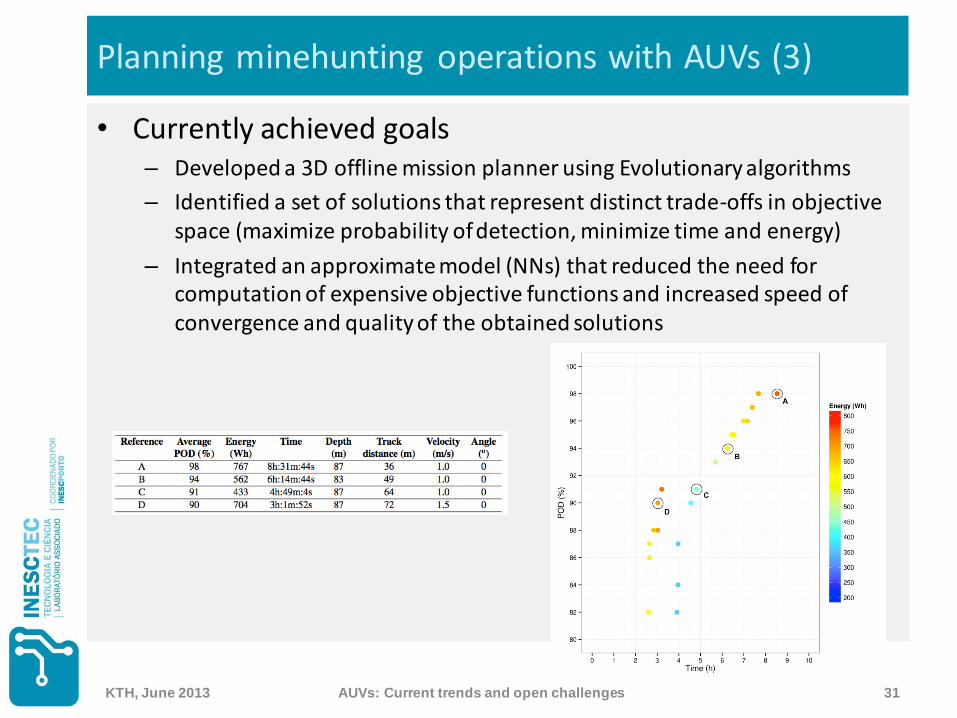
Planning minehunting operations with AUVs (3)
• Currently achieved goals – Developed a 3D offline mission planner using Evolutionary algorithms
– Identified a set of solutions that represent distinct trade-offs in objective space (maximize probability of detection, minimize time and energy)
– Integrated an approximate model (NNs) that reduced the need for computation of expensive objective functions and increased speed of convergence and quality of the obtained solutions
KTH, June 2013 AUVs: Current trends and open challenges 32
Planning minehunting operations with AUVs (4)
• On-going work – Compare the planner’s performance with a simple geometrical planner
(only considering a flat sea bottom)
– Online mission replanning after evaluation of current mission performance
– Planning for multiple vehicles
KTH, June 2013 AUVs: Current trends and open challenges 33
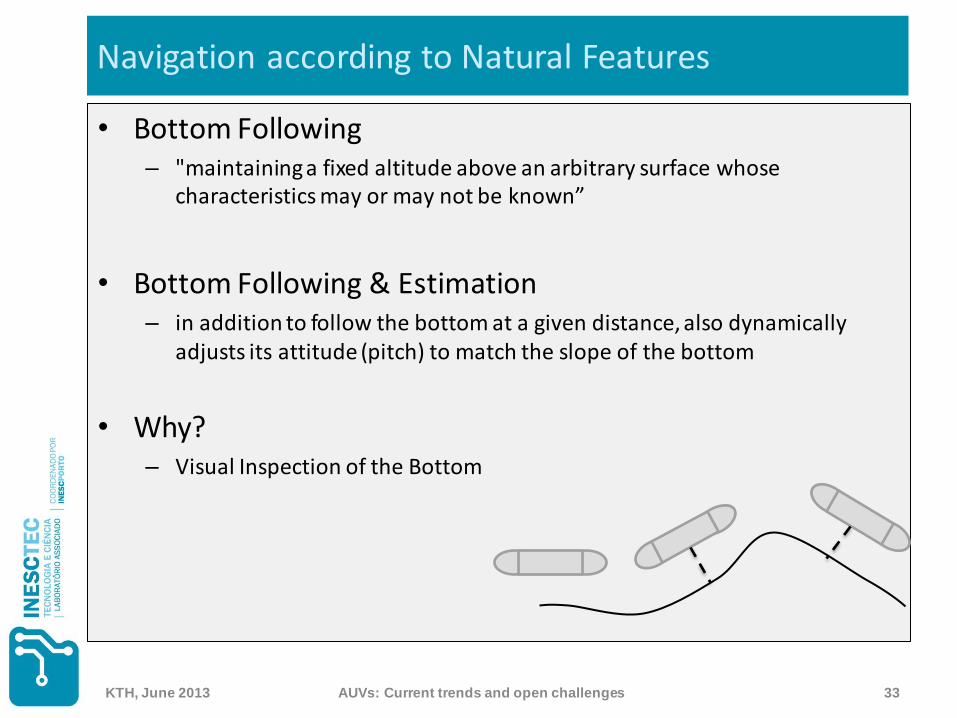
• Bottom Following – "maintaining a fixed altitude above an arbitrary surface whose
characteristics may or may not be known”
• Bottom Following & Estimation – in addition to follow the bottom at a given distance, also dynamically
adjusts its attitude (pitch) to match the slope of the bottom
• Why? – Visual Inspection of the Bottom
Navigation according to Natural Features
KTH, June 2013 AUVs: Current trends and open challenges 34
• Traditional navigation systems of AUVs combine both Acoustic Navigation with Dead-Reckoning – Inherent INS drifts
– Cost of deployment of acoustic beacons/support vessel
• No need for external aiding devices in Terrain Based Navigation (TBN) – Navigation truly autonomous
– Need for a pre-existing map of the terrain
• TBN for AUVs still in research stage! – Lack of underwater terrain maps
– Experimental results only for high-end AUVs
Terrain Based Navigation
KTH, June 2013 AUVs: Current trends and open challenges 35
Terrain Based Navigation (ii)
• TBN produces vehicle horizontal position estimates – matching range measurements of the terrain against an a-priori DTM
– Position estimates bound the INS error growth
• In the last decades there has been extensive research on different TBN methods – Application for both manned and unmanned vehicles (missiles, aircraft)
• Alternative approaches – Correlation-based
– Bayesian
KTH, June 2013 AUVs: Current trends and open challenges 36
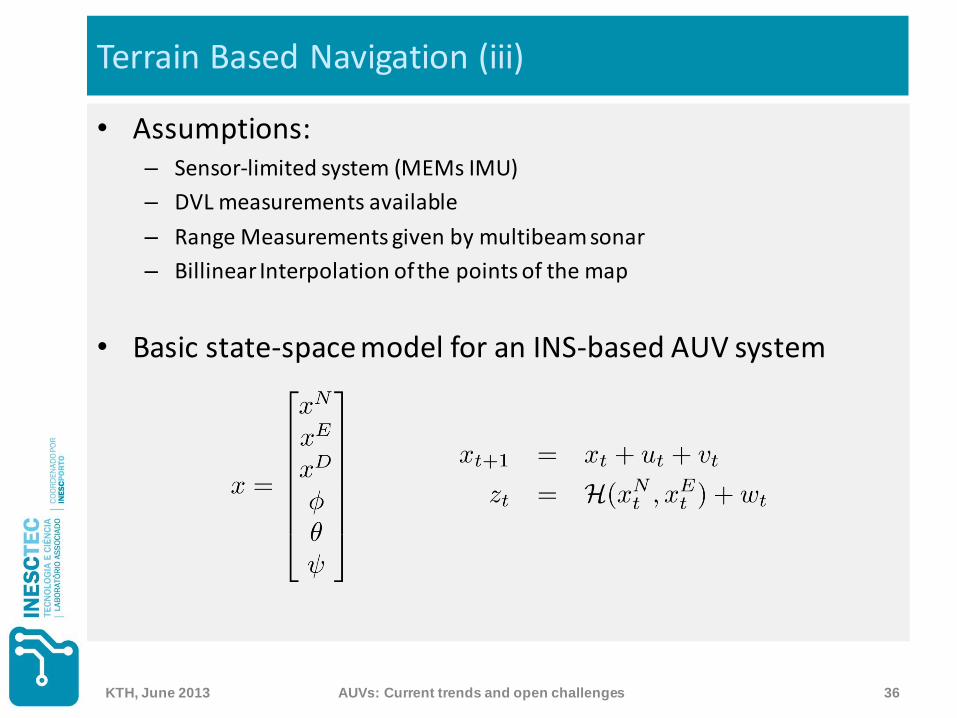
Terrain Based Navigation (iii)
• Assumptions: – Sensor-limited system (MEMs IMU)
– DVL measurements available
– Range Measurements given by multibeam sonar
– Billinear Interpolation of the points of the map
• Basic state-space model for an INS-based AUV system
KTH, June 2013 AUVs: Current trends and open challenges 37
Summary
• Increasing range of applications for marine robotics – Search and rescue
– Defense
– Offshore industry
• Very challenging sensing/perception of the environment
• Automatic planning and re-planning under constraints
• Paradigm shift: single vehicle to multiple vehicles – Decentralized cooperative navigation and control
– Very-low Bandwidth communications
KTH, June 2013 AUVs: Current trends and open challenges 38
Q & A
• Tak!
• Contact info: – [email protected]
– http://oceansys.fe.up.pt