automaÇÃo da movimentaÇÃo de dispositivos de...
TRANSCRIPT

UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTOS ACADÊMICOS DE ELETRÔNICA E MECÂNICA
CURSO SUPERIOR DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
LUIS HENRIQUE SANT’ANA
AUTOMAÇÃO DA MOVIMENTAÇÃO DE DISPOSITIVOS DE ÁUDIO EM CÂMARA REVERBERANTE EM ESCALA REDUZIDA PARA MEDIÇÃO
DO COEFICIENTE DE ESPALHAMENTO SONORO DE INCIDÊNCIA ALEATÓRIA
TRABALHO DE CONCLUSÃO DE CURSO
CURITIBA JULHO, 2018
LUIS HENRIQUE SANT’ANA
AUTOMAÇÃO DA MOVIMENTAÇÃO DE DISPOSITIVOS DE ÁUDIO EM CÂMARA REVERBERANTE EM ESCALA REDUZIDA PARA MEDIÇÃO
DO COEFICIENTE DE ESPALHAMENTO SONORO DE INCIDÊNCIA ALEATÓRIA
CURITIBA JULHO, 2018
Trabalho de Conclusão de Curso de Graduação, apresentado ao Curso Superior de Tecnologia em Mecatrônica Industrial, dos Departamentos Acadêmicos de Eletrônica e Mecânica, da Universidade Tecnológica Federal do Paraná – UTFPR, como requisito parcial para a obtenção do título de Tecnólogo. Orientador: Prof. Dr. Márcio Henrique de Avelar Gomes.

TERMO DE APROVAÇÃO
LUIS HENRIQUE SANT’ANA
AUTOMAÇÃO DA MOVIMENTAÇÃO DE DISPOSITIVOS DE ÁUDIO EM CÂMARA REVERBERANTE EM ESCALA REDUZIDA PARA MEDIÇÃO
DO COEFICIENTE DE ESPALHAMENTO SONORO DE INCIDÊNCIA ALEATÓRIA
Este trabalho de conclusão de curso foi apresentado no dia 06 de junho de 2018, como requisito parcial para obtenção do título de Tecnólogo em Mecatrônica Industrial, outorgado pela Universidade Tecnológica Federal do Paraná. O aluno foi arguido pela Banca Examinadora composta pelos professores abaixo assinados. Após deliberação, a Banca Examinadora considerou o trabalho aprovado.
______________________________ Prof. Dr. Milton Luiz Polli Coordenador de Curso
Departamento Acadêmico de Mecânica
______________________________ Prof. M.Sc. Sérgio Moribe
Responsável pela Atividade de Trabalho de Conclusão de Curso Departamento Acadêmico de Eletrônica
BANCA EXAMINADORA
_____________________________ __________________________ Prof. Dr. Juliano Mourão Vieira Prof. Dr. Paulo Bonifácio UTFPR IFSC ___________________________
Prof. Dr. Márcio Henrique de Avelar Gomes Orientador – UTFPR
“A Folha de Aprovação assinada encontra-se na Coordenação do Curso”

RESUMO SANT’ANA, Luis Henrique. AUTOMAÇÃO DA MOVIMENTAÇÃO DE DISPOSITIVOS DE ÁUDIO EM CÂMARA REVERBERANTE EM ESCALA REDUZIDA PARA MEDIÇÃO DO COEFICIENTE DE ESPALHAMENTO SONORO DE INCIDÊNCIA ALEATÓRIA. 62
f. Trabalho de Conclusão de Curso – Departamentos Acadêmicos de Eletrônica e Mecânica, Universidade Tecnológica Federal do Paraná. Curitiba, 2018. Observa-se que grande tempo é despendido para realização da medição do coeficiente de espalhamento sonoro em câmara reverberante devido ao tempo de espera exigido, de acordo com a norma ISO 17497-1:2004, após abertura e fechamento da câmara. Esta ação é necessária para realizar a mudança de posição dos dispositivos de áudio, tornando o tempo de medição especialmente alto quando em posse de apenas uma fonte e um receptor sonoro, mesmo em câmaras em escala reduzida. Assim, idealizou-se um sistema para a automação da movimentação desses dispositivos para a troca de posição fonte-receptor sem necessidade de abertura da câmara. O presente trabalho apresenta uma revisão bibliográfica sobre o coeficiente e o método de medição, um estudo para o planejamento do sistema de automação e seu desenvolvimento. Por fim, a partir de comparações com medições prévias à inserção do sistema de automação e medições interlaboratorias, apresentadas e discutidas, declarou-se que o sistema apresentou resultados satisfatórios. Palavras-chave: Automação. Acústica. Coeficiente de Espalhamento. Câmara
Reverberante.

ABSTRACT SANT’ANA, Luis Henrique. AUTOMATION OF AUDIO DEVICES PLACEMENT IN REDUCED SCALE REVERBERANT CHAMBER FOR RANDOM INCIDENCE SOUND SCATTERING COEFFICIENT MEASUREMENT. 62 p. Final Year Research Project –
Departments of Electronic Engineering and Mechanical Engineering, Federal University of Technology. Curitiba, 2018. It’s noticed the great time spent for the execution of the random incidence scattering coefficient measurement in reverberant chamber due to the waiting time needed, according to ISO 17497-1:2004, after opening and closing the chamber. This action is required for changes in the audio devices positioning, leading to a time expanse specially great when possessing only one audio source and one audio receiver, even in a reduced scale chamber. Therefore, an automated system for the placement of such devices for different source-receiver positions, without the need of opening the door, was wondered. This project presents a literature review about the coefficient and its measurement technique, a study for the automated system development and its construction. At last, from comparisons with measurements done previously the development of the automated system and interlaboratorial measurements, presented and discussed, it could be stated that the system presented satisfactory results. Keywords: Automation. Acoustics. Scattering Coefficient. Reverberant Chamber.

LISTA DE FIGURAS Figura 1 - Espalhamento por superfície irregular (adaptada) ......................................... 18
Figura 2 - Varredura de senos ........................................................................................ 19 Figura 3 – Modelo de primeiro projeto para receptor ..................................................... 29
Figura 4 - Modelo de primeiro projeto para receptor, em câmara .................................. 30 Figura 5 - Modelo de carro para fonte sonora, vista lateral ............................................ 35
Figura 6 - Modelo de carro para fonte sonora, vista trimétrica ....................................... 35 Figura 7 - Modelo de carro para fonte sonora, com fonte sonora, vista trimétrica .......... 35
Figura 8 - Diagrama eletrônico da Ponte H .................................................................... 37 Figura 9 - Diagrama em blocos do sistema .................................................................... 38
Figura 10 - Fluxograma resumido do programa do microcontrolador ............................. 40 Figura 11 - Posicionamento final de fonte e receptor sonoro ......................................... 42
Figura 12 - Comparação entre coeficientes de epalhamento (ITA, K.U.Leuven, presente trabalho) ......................................................................................................................... 45
Figura 13 - Comparação do coeficiente de espalhamento da amostra antes e depois do sistema de automação ................................................................................................... 46
Figura 14 – Coeficiente de absorção do sistema de automação .................................... 46 Figura 15 - Perfil da amostra .......................................................................................... 60
Figura 16 - Coeficiente de absorção de incidência aleatória .......................................... 61 Figura 17 - Coeficiente de espalhamento de incidência aleatória .................................. 62

LISTA DE IMAGENS Imagem 1 - Câmara reverberante .................................................................................. 10
Imagem 2 - Robô em câmara reverberante em escala reduzida, parte externa ............. 11 Imagem 3 - Robô em câmara reverberante em escala reduzida, parte interna .............. 12
Imagem 4 - Amostra senoidal ......................................................................................... 17 Imagem 5 - Projeto 2, motores e acoplamentos ............................................................. 31
Imagem 6 - Impressora 3D ............................................................................................. 31 Imagem 7 - Câmara com sistema de automação ........................................................... 32
Imagem 8 - Fixação do microfone .................................................................................. 33 Imagem 9 - Suporte para sensor ultrassônico ................................................................ 36
Imagem 10 - Ponte H ..................................................................................................... 37 Imagem 11 - Alguns dos dispositivos eletrônicos utilizados ........................................... 39
Imagem 12 - Dispositivos eletrônicos para processmento de áudio ............................... 41

LISTA DE QUADROS Quadro 1 - Etapas de medição (adaptado) .................................................................... 13
Quadro 2 - Coeficiente de espalhamento máximos da mesa por banda de frequência (adaptado) ...................................................................................................................... 20

LISTA DE TABELAS Tabela 1 - Tempo para troca de posições de microfone ................................................ 43
Tabela 2 – Resultado numérico de sbase e αs ................................................................. 44 Tabela 3 - Temperatura e umidade durante a medição ................................................. 60
Tabela 4 - Resultado numérico da medição ................................................................... 61

SUMÁRIO 1 INTRODUÇÃO ............................................................................................................ 10
1.1 PROBLEMA ............................................................................................................. 12 1.2 JUSTIFICATIVA ....................................................................................................... 14 1.3 OBJETIVO GERAL................................................................................................... 15 1.4 OBJETIVOS ESPECÍFICOS .................................................................................... 15 2 MATERIAIS E MÉTODOS .......................................................................................... 16 3 FUNDAMENTAÇÃO TEÓRICA .................................................................................. 17
3.1 VALIDAÇÃO DO TRABALHO .................................................................................. 17 3.2 MEDIÇÃO DO COEFICIENTE DE ESPALHAMENTO SONORO DE INCIDÊNCIA ALEATÓRIA ................................................................................................................... 18 3.3 POSICIONAMENTO DOS DISPOSITIVOS DE ÁUDIO ........................................... 22 3.4 DISPOSITIVOS DE ÁUDIO ...................................................................................... 23 3.5 SISTEMAS DE MANIPULAÇÃO DE MATERIAIS .................................................... 23 3.6 ARDUINO ................................................................................................................. 25 3.7 MOTORES ............................................................................................................... 26 3.7.1 Seleção De Motores De Acordo Com A Aplicação ................................................ 26 3.7.2 Análise De Tipos De Motores ................................................................................ 26 3.8 CONTROLE DE POSIÇÃO ...................................................................................... 27 3.9 MATLAB E ITA TOOLBOX ....................................................................................... 28 4 DESENVOLVIMENTO ................................................................................................ 29
4.1 SELEÇÃO DO SISTEMA E DESENVOLVIMENTO DA ESTRUTURA MECÂNICA PARA MOVIMENTAÇÃO DO MICROFONE .................................................................. 29 4.2 SELEÇÃO DO SISTEMA E DESENVOLVIMENTO DA ESTRUTURA MECÂNICA PARA MOVIMENTAÇÃO DA FONTE SONORA ............................................................ 33 4.3 DESENVOLVIMENTO DA PARTE ELETRÔNICA ................................................... 36 4.4 DESENVOLVIMENTO DA PROGRAMAÇÃO DO MICROCONTROLADOR ........... 39 4.5 DISPOSITIVOS ELETRÔNICOS DE PROCESSAMENTO DE ÁUDIO UTILIZADOS PARA MEDIÇÃO DO COEFICIENTE DE ESPALHAMENTO ........................................ 40 5 APRESENTAÇÃO E ANÁLISE DOS RESULTADOS ................................................ 42 6 CONCLUSÃO E CONSIDERAÇÕES FINAIS ............................................................. 47
REFERÊNCIAS .............................................................................................................. 48 APÊNDICE A – CÓDIGO DO MICROCONTROLADOR................................................50 APÊNDICE B – RELATÓRIO DE MEDIÇÃO DO COEFICIENTE DE ESPALHAMENTO SONORO DE INCIDÊNCIA ALEATÓRIA.......................................................................60

10
1 INTRODUÇÃO
O conhecimento do coeficiente de espalhamento sonoro de incidência aleatória de
superfícies é importante em situações como caracterização do fundo do mar, projetos de
barreiras em estradas e salas acústicas, assim como na simulação de ambientes por
meio de software [1].
A técnica de medição deste coeficiente é relativamente nova, tendo sido
desenvolvida no final da década de 1990 [1], e o método mais utilizado é o de câmara
reverberante. A câmara possui uma mesa giratória na qual é colocada a amostra da
superfície a ser testada. A Imagem 1 apresenta a câmara em escala reduzida
desenvolvida por Cavalcante e Felchack [2], que serviu para o desenvolvimento do
presente trabalho, que busca automatizar a movimentação de microfone e alto falante,
ação necessária durante a medição.
Imagem 1 - Câmara reverberante Fonte: CAVALCANTE; FELCHACK [2] (2016).

11
Até o presente momento, automação em câmara reverberante em escala reduzida
já foi desenvolvida, como mostram as Imagens 2 e 3. Neste caso, a movimentação de
microfones é dada pelo giro de dois motores acoplados na parte superior externa da
câmara [3]. Um é responsável pela variação de altura enquanto outro realiza a rotação
horizontal.
Imagem 2 - Robô em câmara reverberante em escala reduzida, parte externa Fonte: Willson, N. [3] (2011).

12
Imagem 3 - Robô em câmara reverberante em escala reduzida, parte interna Fonte: Willson, N. [3] (2011).
1.1 PROBLEMA
O problema observado é o longo período de tempo necessário para efetuar o
processo de medição como um todo, relativo ao tempo de medição propriamente dito, ou
seja, emissão de sinais e aquisição de respostas ao impulso. Segundo a norma ISO
17497-1:2004 [4] e como apresentado pelo Quadro 1, o processo de medição do
coeficiente de espalhamento sonoro de incidência aleatória é dividido em quatro etapas
de medição de tempos de reverberação, sendo necessárias, em cada uma, pelo menos
dois posicionamentos de fonte sonora e três posicionamentos de receptor sonoro, de
forma que o arranjo final resulte num total de pelo menos 12 posições fonte-receptor [5].
Pode-se realizar uma medição de T1 seguida de uma medição de T3 (assim como T2 e
T4) aproveitando o mesmo posicionamento dos dispositivos devido à semelhança da
presença ou não do espécime (amostra). Assim, se em posse de apenas uma fonte
sonora e um microfone, seria necessária a movimentação desses dispositivos por pelo
menos 22 vezes durante todo o processo, sendo necessário abrir a câmara para cada

13
movimentação. Além disso, também segundo a norma ISO 17497-1:2004 [4], é
necessário esperar 15/N minutos após o fechamento da câmara antes de iniciar os testes,
sendo N o fator de escala da câmara reverberante. O fator de escala da presente câmara
é 5,13 [2]. Vale lembrar que haveria mais dois momentos de espera por motivos de setup
e inserção ou retirada da amostra.
Quadro 1 - Etapas de medição (adaptado)
Tempo de reverberação Amostra Mesa giratória
T1 não presente não rotacionando
T2 presente não rotacionando
T3 não presente rotacionando
T4 presente rotacionando
Fonte: ISO 17497-1:2004 [4].
Assim, percebe-se que é necessário esperar um tempo total de mais de 64 minutos
devido a aberturas de porta apenas para movimentação dos dispositivos na câmara em
questão, valor que é relativamente alto em relação ao tempo de medição em si. Um
exemplo é o próprio trabalho realizado por Cavalcante e Felchack [2] que, com um total
de 20 ciclos de sinal em T1 e T2, 144 ciclos em T3 e T4, com ciclo de sinal de duração de
2,73s, com 12 posicionamentos de fonte-receptor em cada etapa, levaria cerca de 89
minutos para realizar todas as medições.
Porém, na prática, observa-se que um tempo ainda maior é necessário. Para
realização de medições com os mesmos parâmetros, mas com metade do número de
posições fonte-receptor, leva-se cerca de 120 minutos.
Logo, a automação da movimentação dos dispositivos poderia diminuir
drasticamente o tempo necessário para realização do processo. Isso é importante não
apenas por facilitar a execução da medição, como também pelo aumento de precisão
devido ao estreitamento da possibilidade de flutuações de temperatura e umidade
durante sua realização [4, 5].
Porém, a estrutura mostrada nas Imagens 2 e 3 apresenta-se aparentemente
grande e com custos relativamente elevados, o oposto do ideal buscado por este
trabalho, ou seja, um sistema relativamente pequeno e barato. Além disso, busca-se o

14
desenvolvimento de um sistema que não seja destrutivo à câmara, ou seja, sem
necessidade de furos ou rasgos além dos já existentes, evitando danos ao sistema atual
(é importante citar que a câmara possui, como pode ser observado na Imagem 1, alguns
ganchos que são utilizados para passagem de cabos e posicionamento de difusores e
microfone).
Com a solução do problema de tempo de execução através de um sistema
relativamente pequeno, barato, independente estruturalmente e de fácil uso, um terceiro
problema poderia ser combatido: a necessidade de pesquisa na área. Como citado, o
método de medição é relativamente novo [6] e muitas questões relacionadas com a
precisão do método foram levantadas desde a criação da norma ISO 17497-1:2004 [4],
como a utilização da fórmula de Eyring ao invés de Sabine para determinação do
coeficiente de absorção (que está presente na medição do coeficiente de espalhamento)
[6], variações no tempo de reverberação [7, 8], variações de temperatura e umidade [7,
9], número mínimo necessário de posições fonte-receptor [8], efeito de borda [6, 8, 9],
espaço vazio entre amostra e mesa giratória [9], quantidade mínima de períodos
necessários para representar com confiabilidade uma superfície periódica [9], espaço
vazio entre mesa giratória e base da câmara [9, 10], assim como questões relativas à
altura de microfones [10].
1.2 JUSTIFICATIVA
Ainda que seja discutível a necessidade de espera após abertura e fechamento
da câmara [11], a automação da movimentação dos dispositivos de áudio é um passo em
direção à automação total do processo, que facilitaria sua execução e reduziria o tempo
necessário à sua realização.
De qualquer forma, se seguida a norma vigente [4] e respeitado o tempo de espera
após abertura e fechamento da câmara, essa automação pode reduzir drasticamente o
tempo total de execução de medição de coeficiente de espalhamento sonoro de
incidência aleatória.

15
Isso, somado ao desenvolvimento de um sistema relativamente pequeno, barato,
de fácil utilização e independente estruturalmente, fomenta a disseminação e utilização
do método de medição, auxiliando no desenvolvimento de diversas pesquisas e banco
de dados de coeficiente de espalhamento sonoro de diversas superfícies.
1.3 OBJETIVO GERAL
Automatizar a movimentação dos dispositivos de áudio em câmara reverberante
em escala reduzida a partir de um sistema relativamente pequeno, barato, independente
estruturalmente, de fácil uso e sem necessidade de mudanças estruturais na presente
câmara.
1.4 OBJETIVOS ESPECÍFICOS
O presente trabalho possui os seguintes objetivos específicos:
a) desenvolver a parte mecânica;
b) desenvolver a parte eletrônica;
c) desenvolver a parte de controle e programação;
d) verificar a validade do projeto através de comparação entre medições atuais e
prévias à inserção do sistema de movimentação.

16
2 MATERIAIS E MÉTODOS
Após a elaboração do conceito inicial, buscou-se o desenvolvimento do projeto em
si. Para isso, foi realizada pesquisa bibliográfica sobre os diferentes temas abordados
(acústica, mecânica, eletrônica, programação). Em seguida, foi realizada a confecção do
sistema e consequentemente a análise para sua validação, executando ajustes caso
necessário.
Por se tratar do desenvolvimento de um sistema diferente dos atualmente
presentes e com sugestões inovadoras, o trabalho possui característica exploratória, com
informações obtidas basicamente por revisão bibliográfica.

17
3 FUNDAMENTAÇÃO TEÓRICA
Aqui estão apresentados os principais conceitos que serviram como base, guiaram
e garantiram o desenvolvimento do trabalho até sua conclusão.
3.1 VALIDAÇÃO DO TRABALHO
A validação do sistema foi feita a partir de comparação de coeficientes de
espalhamento da câmara e de superfície de referência, que é circular com relevo
senoidal. Ela foi escolhida porque perfis semelhantes já foram utilizados para
comparações interlaboratoriais em diversas escalas e consequentemente seus valores
de coeficiente são bem conhecidos [9].
A amostra confeccionada é apresentada pela Imagem 4. Ela possui cerca de
800mm de diâmetro, sendo aproximados 11 períodos de 75mm e amplitude de 20mm.
Imagem 4 - Amostra senoidal Fonte: Autoria própria.

18
Ela foi construída a partir de estrutura de isopor em formato senoidal. Foram
utilizadas placas de isopor rígido na parte inferior para maior rigidez estrutural. Para evitar
altos valores de absorção, ela foi revestida com massa acrílica e pintada.
3.2 MEDIÇÃO DO COEFICIENTE DE ESPALHAMENTO SONORO DE INCIDÊNCIA
ALEATÓRIA
Por definição, o coeficiente de espalhamento sonoro é um (1) menos a relação
entre a energia acústica refletida especularmente sobre a energia acústica total refletida
por uma superfície num campo difuso, como mostrado pela Equação (1) [4], sendo s o
coeficiente de espalhamento sonoro de incidência aleatória, αs o coeficiente de absorção
de incidência aleatória e αspec o coeficiente de absorção especular de incidência aleatória
[4]. Em outras palavras, é a quantidade de energia refletida de maneira não especular
em relação com a energia refletida total, o que pode ser observado pela Figura 1 (na
Figura 1, α é o coeficiente de absorção e δ é o coeficiente de espalhamento, pois estão
tratados como dependentes da orientação). Por ser dito como de incidência aleatória,
significa que esse valor é o coeficiente de espalhamento médio da superfície,
independente da orientação desta em relação à incidência do som. Por isso em T3 e T4
há rotação da mesa giratória.
Figura 1 - Espalhamento por superfície irregular (adaptada) Fonte: Vorländer; Mommertz, 2000 [1].

19
𝑠 = 1 − 1 − 𝛼𝑠𝑝𝑒𝑐
1 − 𝛼𝑠=
𝛼𝑠𝑝𝑒𝑐 − 𝛼𝑠
1 − 𝛼𝑠 (1)
O coeficiente de espalhamento sonoro de uma superfície é calculado para cada
banda de frequência de terço de oitava. Logo, já que o sinal utilizado é uma varredura de
senos, utiliza-se filtros no processamento para isolar a resposta da câmara a este impulso
para cada faixa de frequência [5]. A resposta ao impulso obtida a partir da excitação do
sistema com uma varredura de senos e utilizando a técnica de deconvolução apresenta
melhores resultados do que quando comparada com outras técnicas [12]. Um exemplo
de uma varredura de senos está presente na Figura 2.
Quando em posse da resposta ao impulso numa banda de frequência após cada
emissão de sinal, observa-se, no domínio do tempo, a curva de decaimento. Dela, extrai-
se o tempo de reverberação condizente ao trecho de -5dB a -20dB em relação ao pico
de magnitude no início da resposta. Realizando a média aritmética dos tempos de
reverberação, obtém-se os valores de Ti para cada banda de frequência e para cada uma
das quatro respectivas etapas do processo como mostrado pelo Quadro 1.
Figura 2 - Varredura de senos Fonte: Autoria própria.

20
Seguindo o trabalho realizado por Cavalcante e Felchack [2], para T1 e T2 são
realizadas 10 medições para cada posicionamento e, para T3 e T4, são emitidos 72 ciclos
de sinal durante a rotação em cada posicionamento. O sinal é uma varredura exponencial
de senos cujo grau é 17 e duração de 2,73s. A taxa de amostragem é de 48000Hz. A
faixa de frequência de medição é de 500Hz até 20000Hz, já que o fator de escala (N) da
câmara é próximo de cinco (5) [2, 4].
Os tempos de reverberação (T, em segundos), a velocidade do som (c, em metros
por segundo) e o coeficiente de atenuação de energia do ar (m, em metros recíprocos)
são as três variáveis presentes no processo e utilizadas para calcular o coeficiente de
absorção de incidência aleatória (αs) e o coeficiente de absorção especular de incidência
aleatória (αspec) (ambos necessários para o cálculo do coeficiente de espalhamento
sonoro de incidência aleatória do espécime) além do coeficiente de espalhamento sonoro
da mesa da câmara (sbase). É necessário conhecer o coeficiente de espalhamento da
base, pois este não pode superar alguns limites, dependentemente da frequência, como
mostra o Quadro 2. A forma de obtenção desses últimos três coeficientes é apresentada
pela Equação (2) (adaptada de [4]). Para o espécime ser declarado como válido, seu
coeficiente de absorção aleatória não pode ser superior a 0,5 [4].
Quadro 2 - Coeficiente de espalhamento máximos da mesa por banda de frequência (adaptado)
Frequência (f/N) Hz 100 125 160 200 250 315 400 500 630
sbase 0,05 0,05 0,05 0,05 0,05 0,05 0,05 0,05 0,10
Frequência (f/N) Hz 800 1000 1250 1600 2000 2500 3150 4000 5000
sbase 0,10 0,10 0,15 0,15 0,15 0,20 0,20 0,20 0,25
Fonte: ISO 17497-1:2004 [4].
𝑋 = 55,3𝑉
𝑆(
1
𝑐𝑗𝑇𝑗−
1
𝑐𝑖𝑇𝑖) −
4𝑉
𝑆(𝑚𝑗 − 𝑚𝑖) (2)
Na Equação 2, para i = 1 e j = 2, obtém-se o coeficiente de absorção de incidência
aleatória; para i = 3 e j = 4, obtém-se o coeficiente de absorção especular; para obter o

21
coeficiente de espalhamento da base, basta utilizar i = 1 e j = 3. Os valores V e S são
constantes, representando o volume e a área da mesa giratória, respectivamente, em
metros cúbicos e metros quadrados.
A velocidade do som no ar (em m/s) pode ser calculada pela Equação (3) [4],
sendo t a temperatura em graus Celsius. O coeficiente de atenuação de energia do ar
(dado em m-1) é calculado como mostrado pela Equação (4) (adaptada de [4]), sendo α
o coeficiente de absorção do ar, em decibéis por metro.
𝑐 = 343,2√273,15 + 𝑡
293,15 (3)
𝑚 = 𝛼
10log (𝑒)≈
𝛼
4.343 (4)
Devido a incertezas na medição, a norma ISO 17497:2004 [4] apresenta algumas
equações para obter o desvio padrão do coeficiente de espalhamento sonoro de
incidência aleatória.
Primeiramente, realiza-se a média dos tempos de reverberação de N medições
realizadas em cada etapa do processo, como mostrado pela Equação (5) (adaptada de
[4]). Por exemplo: para T1, seria realizada a média dos 120 tempos de reverberação (10
ciclos de sinais para cada uma das 12 posições).
�̅� = 1
𝑁∑ 𝑇𝑖
𝑁
𝑖=1
(5)
Em seguida, pode ser calculado o desvio padrão (δ1, δ2, δ3, δ4) para cada tempo
de reverberação (T1, T2, T3, T4), de acordo com a Equação (6) [4], sendo N o número de
medições.

22
𝛿 = √∑(𝑇𝑖 − �̅�)²
𝑁(𝑁 − 1)
𝑁
𝑖=1
(6)
O desvio padrão do coeficiente de absorção de incidência aleatória, do coeficiente
absorção especular de incidência aleatória e do coeficiente de espalhamento de
incidência aleatória podem ser calculados de acordo com as Equações (7, 8 e 9) [4]
respectivamente.
𝛿𝛼𝑠=
55,3𝑉
𝑐𝑆√(
𝛿2
𝑇22)2 + (
𝛿1
𝑇12)2 (7)
𝛿𝛼𝑠𝑝𝑒𝑐=
55,3𝑉
𝑐𝑆√(
𝛿4
𝑇42)2 + (
𝛿3
𝑇32)2 (8)
𝛿𝑠 = |𝛼𝑠𝑝𝑒𝑐 − 1
1 − 𝛼𝑠| − √(
𝛿𝛼𝑠𝑝𝑒𝑐
𝛼𝑠𝑝𝑒𝑐 − 1)
2
+ (𝛿𝛼𝑠
1 − 𝛼𝑠)
2
(9)
3.3 POSICIONAMENTO DOS DISPOSITIVOS DE ÁUDIO
Para cada etapa do processo (T1 a T4), a medição deve ser repetida para, no
mínimo, M = 12 posicionamentos de fonte-receptor. A norma ISO 354:2003 [5] não cita
posicionamentos específicos dos dispositivos de áudio dentro da câmara para o processo
de medição. Porém, especifica distâncias mínimas entre posições. Levando em

23
consideração o fator de escala da câmara em questão, e realizando aproximação dos
valores para cima, conclui-se que a fonte sonora deve apresentar distância mínima de
aproximadamente 60cm entre posicionamentos, enquanto para o microfone o valor é
próximo de 30cm. Além disso, este deve estar sempre a pelo menos 40cm de distância
da fonte sonora e a 20cm de qualquer superfície, seja o espécime, parede da câmara ou
difusor.
Deve-se ressaltar que o sistema de giro da mesa já está completamente funcional,
não sendo, de maneira alguma, o foco deste trabalho [2]. O motor de passo responsável
por rotacionar a mesa não pode ser utilizado para movimentar os dispositivos de áudio,
pelo menos não durante as rotações em T3 e T4, pois o sistema de medição deve ser
invariante no tempo. Portanto, durante as medições deve ocorrer apenas o giro da
amostra e, entre elas, a mudança de posicionamento dos dispositivos.
3.4 DISPOSITIVOS DE ÁUDIO
A fonte sonora tem formato de cubo de 100mm de aresta [13], com um alto falante
em cada face e massa de aproximadamente 1kg.
O receptor sonoro é um microfone modelo 40AE da marca GRAS, de formato
cilíndrico com aproximados 13mm de diâmetro, 83mm de comprimento e massa de 34g.
3.5 SISTEMAS DE MANIPULAÇÃO DE MATERIAIS
Para a correta classificação do sistema utilizado e auxílio no seu desenvolvimento,
deve-se entender a definição e o funcionamento de alguns tipos de sistemas de
manipulação de materiais. São eles: veículo guiado por trilho, conveyor do tipo trolley,
conveyor do tipo carro no trilho, guindastes e veículos guiados automaticamente [14].

24
Um sistema de veículo guiado por trilhos consiste basicamente de um veículo
motorizado que é guiado por um sistema fixo de trilhos energizados, que
consequentemente fornecem energia ao veículo. Pode haver apenas um trilho ou dois
trilhos paralelos, sendo um sistema normalmente suspenso.
Conveyor é qualquer aparato mecânico que auxilie na movimentação de uma
quantidade relativamente grande de materiais através de um trajeto fixo, podendo ser
uma estrutura suspensa.
O sistema de trolley é um tipo de conveyor similar ao sistema de trilhos. Porém,
apesar de o sistema de movimentação e energização não estar nos trilhos, este não é
individual. O mesmo sistema, normalmente cabo ou corrente, exerce força para o
deslocamento dos diversos itens presentes.
O sistema de carro no trilho é um tipo de conveyor no qual um carro é fixado em
trilhos paralelos, no solo, sendo sua locomoção realizada através de um eixo girante em
contato com roda dirigida, esta presa ao carro.
Um sistema de guindaste é o tipo ponte. Nele, um trolley é fixado em uma estrutura
horizontal, esta apoiada sobre trilhos elevados. Um guincho no trolley é responsável pela
manipulação vertical, enquanto o trolley em si e a estrutura horizontal são responsáveis
pela movimentação em plano paralelo ao chão.
Outro sistema de guindaste é o tipo pórtico. A diferença básica é que a estrutura
horizontal não precisa estar diretamente sobre trilhos, mas sim sobre pernas, e estas
estarem sobre trilhos.
O terceiro sistema de guindaste é chamado de jib crane, sendo o guindaste
rotativo. O trolley na estrutura horizontal, agora equilibrada sobre um mastro central,
movimenta-se radialmente. O mastro é responsável pelo movimento circular.
Automated Guided Vehicles (AGVs) são veículos autopropelidos energizados com
baterias a bordo que são guiados por um trajeto previamente definido. Na forma, eles
podem ser de três tipos: trem, caminhão de pallet, ou veículo de única carga. Podem ser
guiados por três maneiras: cabos guia, faixa ou autoguiados.
O cabo guia é um cabo presente abaixo do piso e posicionado de forma a definir
o trajeto. Ele é energizado e o campo eletromagnético por ele emitido é captado por
sensor presente no veículo.

25
O sistema de faixa consiste por uma faixa colada ou pintada no piso. O veículo
possui um sensor óptico para detectar e seguir a faixa corretamente.
Os SGVs (Self Guided Vehicles), ou veículos autoguiados, podem seguir um
trajeto que não seja continuamente marcado, pois utilizam a técnica de dead reckoning
para movimentação, sendo a atualização efetiva de posicionamento realizada através de
estações identificadas por código de barras ou por efeito magnético.
Assim, dentre diferentes formas possíveis para movimentação de fonte sonora,
encaixam-se sistemas baseados em AGV (Automated Guided Vehicle), SGV (Self
Guided Vehicle) e conveyours do tipo carro sobre trilhos e do tipo trolley.
Devido a questões de distâncias mínimas de posicionamento previamente
apresentadas, notou-se a necessidade de posicionamento suspenso de microfone.
Assim, sistemas baseados em conveyour do tipo trolley e guindastes são passíveis de
construção para a movimentação desse dispositivo.
3.6 ARDUINO
O Arduino é uma placa eletrônica que consiste de um microcontrolador AVR,
entradas e saídas digitais e analógicas e bootloader embutido [15]. Além disso, é possível
fazer a alimentação e comunicação com computador através de porta USB, ou realizar a
alimentação com fonte externa, dependendo da quantidade de periféricos e energia
necessária para o correto funcionamento desses dispositivos. Além disso, torna-se
vantajoso por ser baseado em software e hardware livres, facilidade de uso e pelo preço
acessível [15].
O Arduino pode ser utilizado para controlar o sistema de automação, com botões
e display para realizar o interfaceamento. Até o presente momento, um Arduino modelo
UNO é utilizado para controlar a rotação da mesa giratória.

26
3.7 MOTORES
Aqui são tratados os diferentes tipos de motores que podem ser utilizados e é
realizada uma análise básica sobre suas características.
3.7.1 Seleção De Motores De Acordo Com A Aplicação
Diversos motores podem ser utilizados, porém a especificação deve ser feita após
a conclusão do projeto mecânico, para que possa ser avaliado o torque necessário.
Em relação com a movimentação da fonte sonora, de acordo com os tipos de
sistemas de manipulação selecionados, foi idealizada a utilização de motor acoplado à
roda para movimentação transversal em relação ao eixo do motor por pelo menos 60cm.
Supondo uma estrutura pequena e leve, pequenos motores com escovas, sem escovas
ou de passo poderiam ser empregados.
Em relação à movimentação do microfone, no caso de desenvolvimento de
sistemas baseados em conveyor do tipo trolley e consequente movimentação também
transversal ao eixo do motor, os motores com escovas, sem escovas e de passo também
podem ser empregados. No caso do desenvolvimento de um sistema cuja movimentação
efetiva seja radial, motores de rotação baixa e precisa, como motores de passo, ou com
controle de posição, como servo motores, podem ser utilizados.
3.7.2 Análise De Tipos De Motores
O motor de passo do tipo híbrido é o que apresenta melhor torque entre os outros
dois tipos básicos (relutância variável e ímãs permanentes), além de pequeno
deslocamento por passo, ou seja, melhor resolução [16]. Motores de passo de ímãs

27
permanentes possuem menor torque e resolução, mas são encontrados no mercado com
caixas de redução que compensam esses dois fatores. Porém, os motores de passo
necessitam de circuitos mais elaborados, pois é necessário correto chaveamento de
fases [16, 17]. O motor de corrente contínua sem escovas também necessita da
comutação eletrônica de fases, o que eleva o custo total [18].
O motor de corrente contínua com escovas é um motor com controle de velocidade
simples, bastando apenas controlar a tensão elétrica sobre ele, o que pode ser obtido
com circuitos PWM (pulse width modulation). Uma ponte-H de fase completa seria o
suficiente para controlar o motor nas duas direções [16, 18, 19]. Apesar de ser um motor
de alta rotação e baixo torque, encontra-se no mercado motores desse tipo com sistemas
de redução.
Servo motores possuem controle em malha fechada possibilitando, por exemplo,
controle relativamente preciso da posição (angulação) do eixo. Normalmente possuem
rotação limitada até 180º ou 360º.
Imperativamente, o fator mais importante, como citado, é o torque. Após
determinado e encontrados motores que supram a necessidade, deve-se avaliar os
custos, que envolvem também o circuito de controle de velocidade do motor e
posicionamento dos dispositivos de áudio, e o número de pinos necessários do
microcontrolador.
3.8 CONTROLE DE POSIÇÃO
Quando trata-se de motores, pode ser desejado bom controle de velocidade.
Porém, neste caso, o mais importante é o controle de posição. Especialmente com
relação aos sistemas em que a movimentação é transversal ao eixo do motor, apenas
não são desejadas velocidades excessivamente altas, que dificultem o controle de
posição, ou absurdamente baixas, que tornem o processo de movimentação
demasiadamente lento.

28
Nesses casos, se utilizados motores de passo, é possível realizar o controle de
posição apenas pela contagem de passos. Com motores sem escovas, se o controle de
comutação funcionar a partir de sensores como resolvers, encoders ou Hall-effect
transducers, é possível utilizar seus sinais para determinar a posição do motor [18]. Com
motores com escovas, pode-se temporizar seu funcionamento ou realizar uma adaptação
para utilização de um transdutor de efeito-Hall, por exemplo. Porém, em todas essas
situações, o controle seria efetivo com relação ao motor, mas não ao dispositivo de áudio,
havendo incertezas devido a atrito e folgas mecânicas. Logo, uma maneira de realizar o
controle seria através de cálculo de distância por sensor ultrassônico. Há modelos
baratos e compatíveis com o Arduino, como o HC-SR04.
Sensores indutivos ou capacitivos, dependendo do material, poderiam ser
utilizados como sensores de fim de curso, assim como chaves de fim de curso.
No caso de um veículo seguidor de faixa, a presença ou ausência da faixa poderia
indicar pontos para o posicionamento.
Já com relação a sistemas em que a movimentação efetiva seja radial, podem ser
empregados motores de passo e realizar o controle de posição pela contagem de passos,
ou então utilizar servo motores.
3.9 MATLAB E ITA TOOLBOX
Os processos de emissão e recepção dos sinais de áudio, pós processamento e
cálculo do coeficiente de espalhamento são realizados dentro do ambiente Matlab e ITA
Toolbox.
O Matlab é um ambiente digital desenvolvido especificamente para análise e
processamento, a partir de algoritmos, de dados matemáticos como vetores e matrizes.
O ITA toolbox é uma ferramenta desenvolvida para o ambiente Matlab
especificamente para aquisição e manipulação de sinais de áudio. Foi criada pelo
Institute of Technical Acoustics da RWTH Aachen University, na Alemanha. Seu código
é aberto e sua distribuição, gratuita.

29
4 DESENVOLVIMENTO
Aqui é apresentado o processo de escolha de projetos, além do desenvolvimento
e estruturação das partes mecânica, eletrônica e de controle (programação).
4.1 SELEÇÃO DO SISTEMA E DESENVOLVIMENTO DA ESTRUTURA MECÂNICA
PARA MOVIMENTAÇÃO DO MICROFONE
Dentre os tipos de sistemas de manipulação de materiais selecionados (conveyour
do tipo trolley e guindaste) foi escolhido um sistema baseado em guindaste do tipo jib
crane, por facilidade estrutural.
As Figuras 3 e 4 apresentam o modelo do primeiro projeto, desenvolvido em
Solidworks, que foi confeccionado. A estrutura base era de madeira, fixada na câmara
pelos ganchos já presentes. Nela era fixado um motor e a ele uma haste de alumínio. O
microfone ficava posicionado no extremo da haste, com contrapeso na outra
extremidade.
Figura 3 – Modelo de primeiro projeto para receptor Fonte: Autoria própria.

30
Figura 4 - Modelo de primeiro projeto para receptor, em câmara Fonte: Autoria própria.
Devido à inclinação das hastes de madeira, o movimento final de microfone
sofreria variação de altura, o que era desejado. Após sua confecção, foi observada
grande folga no eixo do servo motor utilizado, o SG90, causando deslocamento da haste
de alumínio.
Assim, foi desenvolvida uma segunda estrutura na qual as hastes inclinadas foram
substituídas por um único mastro central. Foi feito encadeamento de três servo motores
SG90, dois para possibilidade de volta de 360° e um terceiro para variação de altura. Os
acoplamentos foram confeccionados em impressora 3D e podem ser observados na
Imagem 5. A impressora, de modelo Mini da marca UP, está apresentada na Imagem 6.
Esperava-se que com a separação dos eixos e distribuição do peso a haste de
alumínio não fosse mais deslocada. Porém, havia muito balanço do microfone após
movimentação, também devido a folgas mecânicas.

31
Imagem 5 - Projeto 2, motores e acoplamentos Fonte: Autoria própria.
Imagem 6 - Impressora 3D Fonte: Autoria própria.

32
Logo, optou-se por troca do motor e reforço da estrutura. A ideia de variação de
altura foi abandonada pela simples volta de 360° obtida a partir de rotação de motor de
passo. O motor escolhido foi o 28BYJ-48. O acoplamento entre eixo de motor e haste de
alumínio teve de ser improvisado com madeira devido à falta em estoque em lojas virtuais
e ausência em lojas físicas na cidade.
Para o reforço estrutural foi adicionada uma treliça e mais um gancho de fixação
na parte central, necessitando de furo adicional na câmara. A Imagem 7 apresenta as
estruturas já finalizadas e montadas.
Imagem 7 - Câmara com sistema de automação Fonte: Autoria própria.
A fixação do microfone a 400mm do eixo central possibilita que até oito posições
sejam atingidas, pois a distância mínima de 300mm é respeitada em rotações de 45°.

33
O suporte para microfone é de modelo comercial, não tendo sido desenvolvido no
presente trabalho. Ele pode ser observado com mais detalhes, montado na estrutura final,
na Imagem 8.
Imagem 8 - Fixação do microfone Fonte: Autoria própria.
4.2 SELEÇÃO DO SISTEMA E DESENVOLVIMENTO DA ESTRUTURA MECÂNICA
PARA MOVIMENTAÇÃO DA FONTE SONORA
Dentre os sistemas de manipulação base selecionados (AGV, SGV e conveyours
do tipo carro sobre trilhos e do tipo trolley), foram idealizados alguns sistemas para
possível construção:
a) um misto de AGV com conveyour do tipo carro sobre trilhos – a fonte sonora é
fixada em um tipo de carro que locomove-se sobre trilho fixado na base da
câmara;

34
b) um veículo seguidor de faixa que tem suas posições de parada delimitadas pela
ausência da faixa, sendo a fonte sonora fixada a ele;
c) um sistema baseado em conveyour do tipo trolley – a fonte sonora é fixada a
um suporte que move-se, num trajeto delimitado por trilho na base da câmara,
puxado por correias. O movimento é executado por motor, provavelmente de
passo, fixo e não acoplado ao suporte.
Dentre os tipos de sistemas idealizados, sabendo que não seriam necessárias
mais do que duas posições de fonte sonora, os critérios de escolha para o
desenvolvimento foram:
a) desempenho acústico - a estrutura ou suas partes não devem ocupar espaço
demasiadamente grande dentro da câmara, para evitar altos valores de
absorção e espalhamento sonoro;
b) custo;
c) viabilidade/dificuldade técnica;
d) mão de obra;
e) precisão de posicionamento – por questões estruturais, sempre esperou-se
maior precisão do sistema de posicionamento de microfone. Além disso, como
o número de posições de microfone é maior e ele move-se num trajeto circular
de ida e volta para evitar torção de cabos, faz mais sentido movimentar o
microfone para cada uma de suas posições para cada posição de fonte sonora.
Assim, a fonte sonora passaria apenas uma vez por suas posições durante a
medição de cada tempo de reverberação (T1, T2, T3, T4), sendo necessário
apenas respeitar os limites mínimos de distância.
Assim, o sistema selecionado foi o misto de AGV com conveyour do tipo carro
sobre trilhos. As Figuras 5, 6 e 7 apresentam o modelo do sistema, em Solidworks.
A extrusão piramidal na parte do superior do carro não foi o suficiente para apoiar
a fonte sonora com segurança. Logo, foi utilizado arame de ferro galvanizado de 2,1mm
de diâmetro, preso por parafusos no carro e na fonte, para maior estabilidade.

35
Figura 5 - Modelo de carro para fonte sonora, vista lateral Fonte: Autoria própria.
Figura 6 - Modelo de carro para fonte sonora, vista trimétrica Fonte: Autoria própria.
Figura 7 - Modelo de carro para fonte sonora, com fonte sonora, vista trimétrica Fonte: Autoria própria.

36
Na Imagem 9 é possível observar o suporte para o sensor ultrassônico, impresso
em impressora 3D. Ele deve ser inclinado em relação às paredes do veículo em 10° para
que o sensor fique paralelo à parede de fundo da câmara e as medições de distância
possam ser efetuadas corretamente.
Imagem 9 - Suporte para sensor ultrassônico Fonte: Autoria própria.
4.3 DESENVOLVIMENTO DA PARTE ELETRÔNICA
O motor de passo escolhido para a movimentação do microfone foi o 28BYJ-48
utilizando o driver ULN2003a. O motor escolhido para a movimentação da fonte sonora
foi um motor com escovas de 3V a 6V com caixa de redução. O baixo custo e a
popularidade foram fatores que influenciaram na escolha.
Para controlar o motor que move a fonte sonora, foi desenvolvida uma ponte H
com entradas lógicas optoisoladas. Seu diagrama está apresentado pela Figura 8 e ela
pode ser observada na Imagem 10.

37
Figura 8 - Diagrama eletrônico da Ponte H Fonte: Autoria própria.
Imagem 10 - Ponte H Fonte: Autoria própria.
Para controle de posição do microfone utilizou-se a contagem de passos e para a
fonte sonora foi usado o sensor ultrassônico HC-SR04.

38
Foi adicionado à câmara um sensor de temperatura e umidade, modelo DHT 22,
para utilização durante a medição de coeficiente de espalhamento sonoro.
Para interfaceamento, foi utilizado um botão sem trava para comandar a troca de
posições e um display OLED SSD1331 para fornecer informações como temperatura e
umidade relativa, set de posição da fonte sonora, assim como posição atual e erro
(offset), número da posição fonte–receptor atual, contagem de passos do motor do
microfone e aviso de movimentação dos dispositivos de áudio ou giro da mesa.
O diagrama em blocos final da eletrônica é apresentado pela Figura 9. Nele não
estão presentes os dispositivos de interface e o barramento para energização de nível
lógico (VCC e GND), proveniente do microcontrolador.
A Imagem 11 apresenta os dispositivos eletrônicos que ficam fora da câmara (com
exceção de dispositivos de interface).
Figura 9 - Diagrama em blocos do sistema Fone: Autoria própria.

39
Imagem 11 - Alguns dos dispositivos eletrônicos utilizados Da esquerda para a direita: fonte de alimentação, ponte H, jumper, driver ULN2003a, cabo de alimentação e dados para o microcontrolador, Arduino UNO, barramento lógico. Fonte: Autoria própria.
4.4 DESENVOLVIMENTO DA PROGRAMAÇÃO DO MICROCONTROLADOR
Primeiramente, foi desenvolvido um programa em MATLAB para cálculo de
parâmetros do motor de passo da mesa giratória. Depois foi feito em Arduino o cálculo
do tempo necessário para execução tanto da função de cálculo de distância quanto da
apresentação de informações no display. Também foi criado um programa para
determinação empírica da relação passos/grau do motor do microfone.
O programa final, responsável pela movimentação dos dispositivos de áudio,
rotação da mesa giratória, medição de temperatura e umidade e apresentação de
informações está presente no APÊNDICE A. Seu fluxograma resumido pode ser
observado na Figura 10.

40
Tendo conhecimento da relação passos/grau do motor do microfone, seu chamado
“vetor de posição” possui valores previamente calculados. O sistema de movimentação
da fonte sonora apresentou comportamento mais tendencioso do que preciso. Logo, os
seus valores do vetor de posição, assim como os referentes à tensão de operação e
distância de frenagem, foram declarados a partir de observação do seu comportamento
médio.
Figura 10 - Fluxograma resumido do programa do microcontrolador Fonte: Autoria própria.
4.5 DISPOSITIVOS ELETRÔNICOS DE PROCESSAMENTO DE ÁUDIO UTILIZADOS
PARA MEDIÇÃO DO COEFICIENTE DE ESPALHAMENTO
Os dispositivos eletrônicos de processamento de áudio utilizados para medições
estão apresentados na Imagem 12.

41
Imagem 12 - Dispositivos eletrônicos para processmento de áudio Ao fundo: amplificador de potência Alesis, modelo RA-100. À esquerda: alimentador para microfone G.R.A.S. À direita: interface de áudio RME, modelo Hammerfall DSP Multiface II.

42
5 APRESENTAÇÃO E ANÁLISE DOS RESULTADOS
Para definição das posições, todas as distâncias mínimas exigidas pela norma [4]
foram respeitadas. A Figura 11 apresenta o posicionamento final dos dispositivos, a partir
de uma vista superior, e a quais posições fonte-receptor cada posicionamento pertence.
As paredes laterais da câmara não são paralelas, pois isso auxilia na redução de ondas
estacionárias [2].
Figura 11 - Posicionamento final de fonte e receptor sonoro Fonte: Autoria própria.
Percebeu-se que, apesar dos posicionamentos de microfone ocorrerem a cada
45°, não seria possível a implementação de 8 posições de microfone, porque ou este
ficaria muito próximo dos difusores, ou muito próximo da fonte sonora, de acordo com a
norma [4]. Porém, o arranjo apresentado respeita todos os requisitos da norma.
Em relação à precisão da movimentação do microfone, não foi observado
problema algum. Em relação à movimentação da fonte sonora, foi observado desvio de
até 25mm para mais ou para menos. Como citado, isso não apresenta problema algum
para as medições, pois todos os posicionamentos de microfone são realizados para cada
posicionamento de fonte sonora, não havendo necessidade de movimentá-la mais de
43
uma vez para cada uma de suas posições durante medições referentes ao mesmo tempo
de reverberação (T1, T2, T3, T4). Isso pode ser observado na Figura 11. Em outras
palavras, mesmo com imprecisão absoluta na movimentação, a precisão relativa é boa.
Para cada tempo de reverberação, a fonte sonora apresenta duas posições que
respeitam as distâncias entre posicionamentos próprios e em relação ao receptor sonoro.
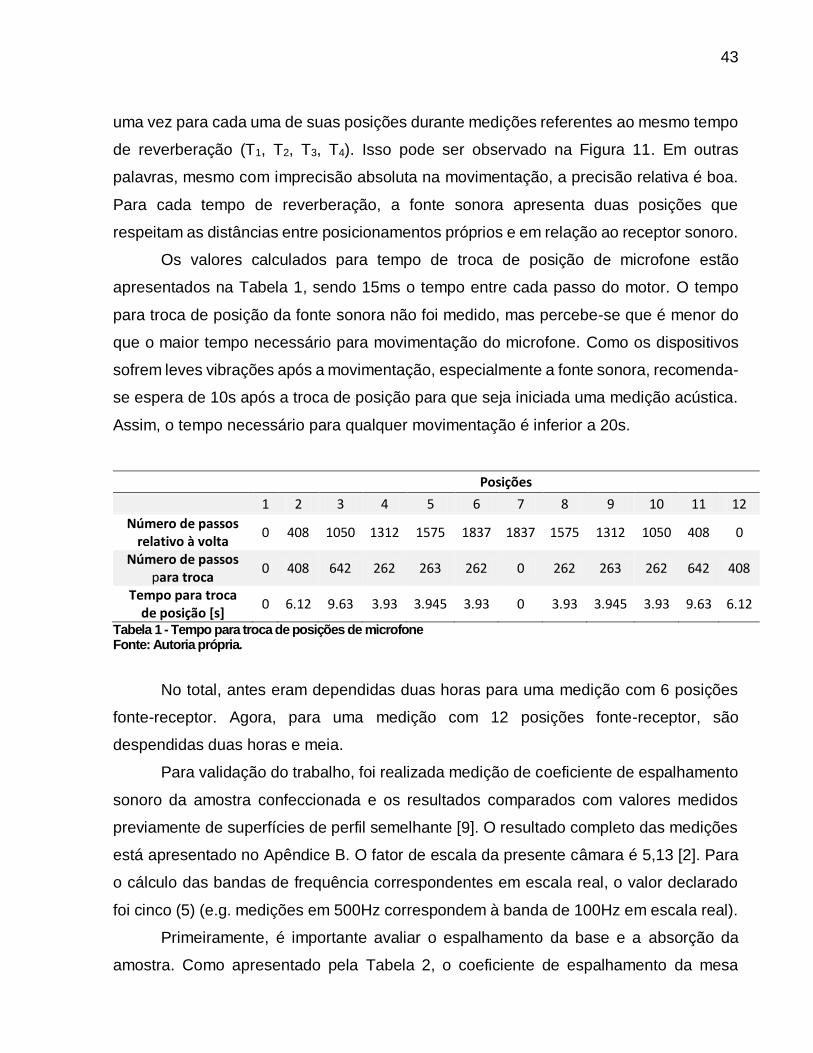
Os valores calculados para tempo de troca de posição de microfone estão
apresentados na Tabela 1, sendo 15ms o tempo entre cada passo do motor. O tempo
para troca de posição da fonte sonora não foi medido, mas percebe-se que é menor do
que o maior tempo necessário para movimentação do microfone. Como os dispositivos
sofrem leves vibrações após a movimentação, especialmente a fonte sonora, recomenda-
se espera de 10s após a troca de posição para que seja iniciada uma medição acústica.
Assim, o tempo necessário para qualquer movimentação é inferior a 20s.
Posições
1 2 3 4 5 6 7 8 9 10 11 12
Número de passos relativo à volta
0 408 1050 1312 1575 1837 1837 1575 1312 1050 408 0
Número de passos para troca
0 408 642 262 263 262 0 262 263 262 642 408
Tempo para troca de posição [s]
0 6.12 9.63 3.93 3.945 3.93 0 3.93 3.945 3.93 9.63 6.12
Tabela 1 - Tempo para troca de posições de microfone Fonte: Autoria própria.
No total, antes eram dependidas duas horas para uma medição com 6 posições
fonte-receptor. Agora, para uma medição com 12 posições fonte-receptor, são
despendidas duas horas e meia.
Para validação do trabalho, foi realizada medição de coeficiente de espalhamento
sonoro da amostra confeccionada e os resultados comparados com valores medidos
previamente de superfícies de perfil semelhante [9]. O resultado completo das medições
está apresentado no Apêndice B. O fator de escala da presente câmara é 5,13 [2]. Para
o cálculo das bandas de frequência correspondentes em escala real, o valor declarado
foi cinco (5) (e.g. medições em 500Hz correspondem à banda de 100Hz em escala real).
Primeiramente, é importante avaliar o espalhamento da base e a absorção da
amostra. Como apresentado pela Tabela 2, o coeficiente de espalhamento da mesa

44
(sbase) e o coeficiente de absorção da amostra (αs) estão abaixo dos limites máximos
exigidos. Os limites de espalhamento da mesa também estão apresentados na Tabela 2
e 0,5 é o limite para a absorção da amostra [4].
Banda correspondente à escala real f[Hz]
sbase ISO [-]
sbase [-]
αs [-]
100 0,05 0.00 0.23
125 0,05 0.00 0.29
160 0,05 0.00 0.23
200 0,05 0.00 0.19
250 0,05 0.00 0.17
315 0,05 0.00 0.22
400 0,05 0.03 0.22
500 0,05 0.00 0.20
630 0,10 0.00 0.14
800 0,10 0.00 0.10
1000 0,10 0.00 0.10
1250 0,10 0.01 0.13
1600 0,15 0.01 0.08
2000 0,15 0.02 0.05
2500 0,15 0.02 0.03
3150 0,20 0.04 0.06
4000 0,20 0.00 0.00 Tabela 2 – Resultado numérico de sbase e αs
Fonte: Autoria própria.
A Figura 12 apresenta a comparação interlaboratorial de coeficiente de
espalhamento em função do período da amostra em relação ao comprimento de onda da
frequência (Λ/ λ).

45
Figura 12 - Comparação entre coeficientes de epalhamento (ITA, K.U.Leuven, presente trabalho) Fonte: Autoria própria.
É observada maior discrepância entre os coeficientes nas frequências mais altas.
Isso pode ser devido à não proporcionalidade das amostras. A amostra do artigo citado
[9] possui proporção período/amplitude de 3,47, enquanto a utilizada neste trabalho é de
3,75. Isso significa que a amplitude da amostra do artigo é relativamente maior ao seu
período do que a amostra utilizada neste trabalho. Isso pode resultar em maiores valores
de espalhamento, como observado.
Porém, comparando com resultados de medição realizada previamente à inserção
do sistema de automação, na Figura 13, observa-se que o coeficiente de espalhamento
da amostra apresentou-se, previamente, ainda mais baixo. Com a Figura 14, que
apresenta o coeficiente de absorção do sistema de automação em relação à câmara
previamente à inserção do sistema, observa-se que o sistema de automação em si não
atenua significativamente as ondas sonoras nas altas frequências, não sendo causa da
discrepância.
A análise com as medições antigas, porém, deve ser feita com cuidado. A medição
foi realizada com seis posições fonte-receptor e é possível que tenha havido mudança
de orientação da amostra e da mesa giratória entre medições em diferentes posições de
T1 e T2. Além disso, os valores de velocidade do som e coeficiente de atenuação do ar
utilizados foram os mesmos que os da nova medição, pois antes não havia sido
implementado um sistema de medição de temperatura e umidade.

46
Figura 13 - Comparação do coeficiente de espalhamento da amostra antes e depois do sistema de automação Fonte: Autoria própria.
Figura 14 – Coeficiente de absorção do sistema de automação Fonte: Autoria própria.
Outro fator que pode ter influenciado os baixos valores de espalhamento nas altas
frequências é o material utilizado. Apesar de tomadas as devidas precauções para evitar
grande absorção proveniente da amostra, ainda é um material menos rígido do que
madeira, utilizado no artigo [9]. Por fim, outro possível motivo para discrepância é a menor
responsividade do microfone para altas frequências [20].

47
6 CONCLUSÃO E CONSIDERAÇÕES FINAIS
Após a análise dos resultados conclui-se que a automação da movimentação dos
dispositivos de áudio foi satisfatória e cumpriu com todos os requisitos. Na prática, para
uma medição completa com seis posições eram despendidas duas horas. Agora, em
duas horas e meia faz-se uma medição com 12 posições, uma ganho de tempo de 37,5%.
Para aumentar a precisão de posicionamento da fonte sonora, o sensor
ultrassônico pode ser substituído por chaves fim de curso ou sensores indutivos ou
capacitivos. Se desejado um sistema com três posicionamentos, o veículo seguidor de
faixa é uma opção. Outra melhoria seria a confecção de estrutura mais rígida para o
suporte da fonte sonora, diminuindo vibrações após movimentação.
Em relação à movimentação do microfone, também há espaço para melhorias. Se
ignorado o valor mínimo entre microfone e fonte sonora sugerido pela norma [4], que é
mais uma indicação global, e for realizado o cálculo de distância crítica em campo difuso
[21], o microfone provavelmente poderá realizar as oito posições num plano horizontal
circular. Se a distância crítica for menor a ponto de permitir que o microfone fique ainda
mais baixo, é passível a análise para confecção um sistema que altere a altura do
microfone para que mais posições possam ser atingidas.
Em relação à amostra, por sua base ser um perfil de isopor e não um bloco
usinado, economiza-se muito em custo de material e mão de obra, facilitando a confecção
de várias amostras. Porém, como observado, é possível que isso gere valores imprecisos
de coeficiente de espalhamento. Logo, é interessante a realização de melhor estudo
sobre o assunto.
Em relação à aquisição de sinais, é importante a implementação de curva de
correção para os sinais provenientes do microfone.

48
REFERÊNCIAS
[1] VORLÄNDER, Michael; MOMMERTZ, Eckard. Definition and measurement of random-incidence scattering coefficients. Applied Acoustics, Elsevier, v. 60, n. 2, p. 187-199, 2000. [2] CAVALCANTE, Ian M.; FELCHACK, Vinicius da M. MEDIÇÃO DO COEFICIENTE DE ESPALHAMENTO ACÚSTICO DE INCIDÊNCIA ALEATÓRIA EM CÂMARA REVERBERANTE EM ESCALA REDUZIDA. Trabalho de conclusão de curso –
Universidade Tecnológica Federal do Paraná, 2016. [3] WILLSON, Nathan. Small Scale Reverberation Chamber. 2011. Disponível em: http://web.uvic.ca/~nwillson/projects/UROP/FinalReportUROP.pdf Acesso em: 06 nov. 2017, 09:21. [4] ISO 17497-1. Acoustics – Sound-scattering properties of surfaces – Part 1: Measurement of the random-incidence scattering coefficient in a reverberation room. 2004. [5] ISO 354. Acoustics – Measurement of Sound Absorption in a Reverberation Room. 2003.
[6] D’Antonio, Peter; RIFE, Brian. The State of Art in the Measurement of Acoustical Coefficients. 20??. Disponível em: http://rpgacoustic.com/documents/2016/09/state-of-the-art-in-measuring-acoustical-coefficients.pdf Acesso em: 26 nov. 2017, 23:20. [7] RYCHTÁRIKOVÁ, Monika; et al. Correction Algorithm for Sound Scattering Coefficient Measurements. International Congress on Acoustics, 2016.
[8] MÜLLER-TRAPET, Markus; VORLÄNDER, Michael. Uncertainty Analysis of Standardized Measurements of Random-Incidence Absorption and Scattering Coefficients. The Journal of the Acoustical Society of America, vol. 137, p. 63, 2015.
[9] VOLÄNDER, Michael; et al. Case Studies in Measurement of Random Incidence Scattering Coefficients. Acta Acustica united with Acustica, vol. 90, p. 858-867, 2004. [10] SHTREPI, Louena; et al. Accuracy of the Random-Incidence Scattering Coefficient Measurement. Applied Acoustics, Elsevier, vol. 106, p. 23 – 35, 2016.
[11] DE GEETERE, L.; VERMEIR, G. Investigations on real-scale experiments for the measurement of the ISO scattering coeficiente in the reverberation room. Proc. Forum Acusticum, Sevilla, 2002, CD-ROM, paper RBA-06-004-IP. Disponível em: http://www.sea-acustica.es/fileadmin/publicaciones/Sevilla02_rba06004.pdf Acesso em: 23 mai. 2018, 01:12.

49
[12] MÜLLER, Swen; MASSARANI, Paulo. Medições da Resposta em Frequência de Sistemas de Sonorização. LAENA – INMETRO. 20??. [13] TOURINHO, André Miazaki da Costa. Construção de modelo para a análise de funções de transferência de sistemas vibro-acústicos. Projeto de graduação –
Universidade de Brasília – UnB, 2011. [14] GROOVER, Mikell P. Automation, Production Systems, and Computer Integrated Manufacturing. 2008.
[15] CAVALCANTE, Marisa A.; TAVOLARO, Cristiane R. C.; MOLISANI, Elio. FÍSICA COM ARDUINO PARA INICIANTES. Revista Brasileira de Ensino de Física, v. 33, n. 4, p. 4503-1 – 4503-9. 2011. [16] ACARNLEY, Peter P. STEPPING MOTORS: a guide to modern theory and
practice. 2ed. 1984. [17] KENJO, Takashi. STEPPING MOTORS AND THEIR MICROPROCESSOR CONTROLS. 1984. Reimpressão. 1990.
[18] HENDERSHOT JR., J. R.; MILLER, T.J.E. DESIGN OF BRUSHLESS PERMANENT-MAGNET MOTORS. 1994. [19] KENJO, Takashi. POWER ELECTRONICS FOR THE MICROPROCESSOR AGE. 1990. Reimpressão. 1995. [20] GRAS SOUND AND VIBRATION. GRAS 40AE 1/2” Prepolarized Free-Field Microphone. Disponível em: https://www.gras.dk/products/measurement-microphone-cartridge/prepolarized-cartridges-0-volt/product/150-40ae Acesso em: 06 jul. 2018, 10:07. [21] KUTTRUFF, Heinrich. ROOM ACOUSTICS. 5ed. 2009.

50
APÊNDICE A – CÓDIGO DO MICROCONTROLADOR
Aqui é apresentado o código utilizado no microcontrolador Arduino para
movimentação dos dispositivos de áudio, leitura de temperatura e umidade, rotação da
mesa giratória e apresentação de informações.
//Código utilizado para movimentação dos dispositivos de áudio e rotação da
mesa da
//câmara reverberante em escala reduzida da Universidade Tecnológica Federal
do Paraná - UTFPR
//Autor: aluno de graduação Luis Henrique Sant'Ana
//Orientador: Prof. Dr. Márcio Henrique de Avelar Gomes
//função 'turn' e demais parâmetros relativos à mesa giratória
//foram baseados no código desenvolvido por Ian Cavalcante e Vinícius Felchack
//antes de iniciar o programa (fazer upload)
//posicionar microfone na sua posição 1 e
//poscicionar fonte sonora a uma distância (sourcePos[0] + range) da parede
//(ou simplesmente próximo à sua posição 2)
#include <U8glib.h> //biblioteca do display OLED
#include <DHT.h> //biblioteca do sensor de temperatura e umidade
#include <Ultrasonic.h> //biblioteca do sensor ultrassônico
//até a função 'setup' os parâmetros devem ser inseridos pelo usuário
//após a função setup o programa deve ser independente
//pinagem do Arduino
#define triggerPin 0 //pino trigger do sensor ultrassônico
#define echoPin 1 //pino echo do sensor ultrssônico
#define posPin 2 //pino para botão da troca de posição
#define ttPin 3 //pino para botão para rotação da mesa giratória
#define stepperPin1 4 //pino 1 do motor do microfone
#define stepperPin2 5 //pino 2 do motor do microfone
#define stepperPin3 6 //pino 3 do motor do microfone
#define stepperPin4 7 //pino 4 do motor do microfone
#define thPin 8 //pino do sensor de temperatura e umidade
#define mosfet1pin 9 //pino do MOSFET 1 da ponte H
#define mosfet4pin 10 //pino do MOSFET 4 da ponte H
#define mosfet3pin 11 //pino do MOSFET 3 da ponte H
#define mosfet2pin 12 //pino do MOSFET 2 da ponte H
#define ttPulsePin 13 //pino de pulsos da mesa giratória
//outros parâmetros
//temperatura e umidade
#define DHTTYPE DHT22 //modelo do sensor de temperatura e umidade
//o sensor de temperatura e umidade necessita de 2000ms entre medições
//logo, são feitas 4 chamadas das funções de movimentação a cada 500ms

51
//como na rotina ('delayFunction') está adicionada atualização constante da
distância da fonte sonora,
//o valor de espera pode ser menor
//Uma medição de distância leva cerca de 10ms, necessita de delay de 60ms e a
rotina do display leva cerca de 140ms
//logo:
#define timesToCall 4 //quantas vezes a função 'delayFunction()'
deve ser chamada
#define delayTH 300 //intervalo de tempo entre chamadas para
movimentação [ms]
//posições fonte-receptor
#define sourceN 2 //número de posições de fonte
#define posLimit 12 //número de posições totais
//fonte sonora
#define breakingDistance 120 //distância [mm] em que a frenagem deve
começar para posição 1
#define breakingDistance2 120 //distância [mm] em que a frenagem deve
começar para posição 2
#define range 200 //distância [mm] para que a fonte não se mova
desnecessariamente
#define highVoltage 4 //tensão para alta velocidade
#define lowVoltage 3 //tensão para baixa velocidade
//mesa giratória
//nota interna: valores para 10 micropassos
#define T 60000 //passos para a rotação (se variável 'j' for unsigned int,
valor máximo é 65535)
#define tHigh 2355 //tempo alto do pulso
#define tLow tHigh //tempo baixo do pulso
//inicializações
U8GLIB_SSD1306_128X64 u8g(U8G_I2C_OPT_NO_ACK); //inicialização do display OLED
DHT dht(thPin, DHTTYPE); //inicialização do sensor de
temperatura e umidade
Ultrasonic ultrasonic(triggerPin, echoPin); //inicialização do sensor
ultrassônico
//declaração de variáveis
//sensor de temperatura e umidade
int i = 0; //contador para as chamadas de movimentação
float h = 0.0, t = 0.0; //umidade relativa [%], temperatura [°C]
//sensor ultrassônico
long int timex = 0; //variável de tempo utilizado para medição de
distância
float distance = 0.0; //distância [mm]
//posições fonte-receptor
int pos = 0; //posição atual
volatile boolean flagPos = false; //flag para troca de posição
//fonte sonora
float x = 0.0, sourceSet = 0.0, offset = 0.0; //posição, posição destino, erro
[mm]

52
int highSpeed = 0, lowSpeed = 0, codePos = 0; //velocidades de movimentação e
posição de referência para o código
//microfone
int micSteps = 0, micSet = 0; //posição, posição destino
boolean A = false, B = false, C = false; //variáveis lógicas para giro do
motor para movimentação do microfone
//mesa giratória
unsigned int j = 0; //contador de passos do motor da mesa giratória
volatile boolean flagTT = false; //flag para giro da mesa
//vetores de posição
const int sourcePos[2] = {150, 800}; //posições [mm] da fonte sonora
const int micPos[6] = {0, 408, 1050, 1312, 1575, 1837}; //posições [passos] do
microfone
//apresentação das funções
void draw();
void readTH();
void delayFunction();
void measureDistance();
void setFlagPos();
void changePosition();
void moveSource();
void moveMic();
void setFlagTT();
void turn();
void setup()
{
//pinos do display OLED já configurados na inicialização
//pino do sensor de temperatura e umidade já configurado na inicialização
//pinos do sensor ultrassônico já configurados na inicialização
readTH();
sourceSet = sourcePos[0];
measureDistance();
u8g.firstPage();
do
{
draw();
} while(u8g.nextPage());
//fonte sonora
pinMode(mosfet1pin, OUTPUT);
pinMode(mosfet2pin, OUTPUT);
pinMode(mosfet3pin, OUTPUT);
pinMode(mosfet4pin, OUTPUT);
digitalWrite(mosfet1pin, LOW);
digitalWrite(mosfet2pin, LOW);
digitalWrite(mosfet3pin, LOW);
digitalWrite(mosfet4pin, LOW);
highSpeed = highVoltage;
highSpeed = map(highSpeed, 0, 5, 0, 255);
lowSpeed = lowVoltage;
lowSpeed = map(lowSpeed, 0, 5, 0, 255);

53
//microfone
pinMode(stepperPin1, OUTPUT);
pinMode(stepperPin2, OUTPUT);
pinMode(stepperPin3, OUTPUT);
pinMode(stepperPin4, OUTPUT);
digitalWrite(stepperPin1, LOW);
digitalWrite(stepperPin2, LOW);
digitalWrite(stepperPin3, LOW);
digitalWrite(stepperPin4, HIGH); //inicia com fase 4 acionada
//posições fonte-receptor
pinMode(posPin, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(posPin), setFlagPos, FALLING);
delay(1000);
flagPos = false;
pos = 1;
//mesa giratória
pinMode(ttPin, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(ttPin), setFlagTT, FALLING);
delay(1000);
flagTT = false;
pinMode(ttPulsePin, OUTPUT);
digitalWrite(ttPulsePin, LOW);
moveSource();
}
void loop()
{
readTH();
u8g.firstPage();
do
{
draw();
} while(u8g.nextPage());
if((digitalRead(posPin) == LOW) && (!flagPos))
{
while(digitalRead(posPin) == LOW)
{}
delay(500);
flagPos = false;
}
if((digitalRead(ttPin) == LOW) && (!flagTT))
{
while(digitalRead(ttPin) == LOW)
{}
delay(500);
flagTT = false;
}
delayFunction();
}

54
void draw()
{
u8g.setFont(u8g_font_courB12);
u8g.setColorIndex(1);
u8g.setPrintPos(0,12);
u8g.print("t=");
u8g.print(t);
u8g.setPrintPos(0,25);
u8g.print("h=");
u8g.print(h);
u8g.setPrintPos(0, 38);
u8g.print("set=");
u8g.print(sourceSet, 0);
u8g.setPrintPos(0, 51);
u8g.print(" x =");
u8g. print(x, 0);
u8g.setPrintPos(0, 64);
u8g.print("off=");
u8g.print(offset, 0);
u8g.setPrintPos(80, 12);
u8g.print("p=");
u8g.print(pos);
u8g.setPrintPos(80, 25);
u8g.print("mic");
u8g.setPrintPos(80,38);
u8g.print(micSteps);
if((flagPos) || (flagTT))
{
u8g.drawStr(80, 64, "!");
}
}
void readTH()
{
t = dht.readTemperature(); //Celsius, 'true' for Fahrenheit
h = dht.readHumidity();
}
void delayFunction()
{
for(i = 0; i < timesToCall; i++)
{
if(flagPos)
{
changePosition();
}
else
{
if(flagTT)
{
u8g.firstPage();
do
{
draw();
} while(u8g.nextPage());
turn();
}

55
}
measureDistance();
u8g.firstPage();
do
{
draw();
} while(u8g.nextPage());
delay(delayTH);
}
}
void measureDistance()
{
timex = ultrasonic.timing();
x = ultrasonic.convert(timex,1) * 10;
offset = x - sourceSet;
delay(60);
}
void setFlagPos()
{
flagPos = true;
}
void changePosition()
{
delay(500);
if(digitalRead(posPin) == LOW)
{
if(pos == 1)
{
pos = posLimit;
}
else
{
pos--;
}
}
else
{
if(pos == posLimit)
{
pos = 1;
}
else
{
pos++;
}
}
u8g.firstPage();
do
{
draw();

56
} while(u8g.nextPage());
moveSource();
moveMic();
flagPos = false;
}
void moveSource()
{
//posição de fonte 1 (sourcePos[0])
codePos = 0;
if((pos > codePos * (posLimit/sourceN)) && (pos <= ((codePos + 1)) *
(posLimit/sourceN)))
{
sourceSet = sourcePos[codePos];
measureDistance();
if(x > (sourceSet + range))
{
//é pressuposto que a fonte sempre estará na posição
//sourceSet = sourcePos[1] quando deva ir até
//sourcePos[0]
analogWrite(mosfet1pin, highSpeed);
digitalWrite(mosfet4pin, HIGH);
while(x > (sourceSet + breakingDistance))
{
measureDistance();
}
digitalWrite(mosfet1pin, LOW);
digitalWrite(mosfet4pin, LOW);
}
}
else
{
//posição de fonte 2 (sourcePos[1])
codePos = 1;
if((pos > codePos * (posLimit/sourceN)) && (pos <= ((codePos + 1) *
(posLimit/sourceN))))
{
sourceSet = sourcePos[1];
measureDistance();
if(x < (sourceSet - range))
{
//é pressuposto que a fonte sempre estará na posição
//sourceSet = sourcePos[0] quando deva ir até
//sourcePos[1]
analogWrite(mosfet2pin, lowSpeed);
digitalWrite(mosfet3pin, HIGH);

57
while(x < (sourceSet - breakingDistance2))
{
measureDistance();
}
digitalWrite(mosfet2pin, LOW);
digitalWrite(mosfet3pin, LOW);
}
}
}
}
void moveMic()
{
//o código para giro do motor do microfone simula um circuito lógico digital
//que comuta as saídas lógicas para as entradas no driver do motor de acordo
com os bits 'A', 'B' e 'C'
//'A' seria um bit de direção proveniente do microcontrolador
//e 'B' e 'C' seriam saídas de contadores digitais, contando a cada pulso de
clock também proveniente do microcontrolador
micSet = pos - 1;
if(pos > (posLimit/sourceN))
{
micSet = map(micSet, (posLimit/sourceN - 1), (2 * posLimit/sourceN - 1),
(posLimit/sourceN - 1), 0);
}
if(micPos[micSet] > micSteps)
{
A = true;
}
else
{
if(micPos[micSet] < micSteps)
{
A = false;
}
}
while(micSteps != micPos[micSet])
{
if((!B && !C) || (B && C))
{
C = !C;
}
else
{
B = !B;
}
if((!A && !B && C) || (A && B && !C))
{
digitalWrite(stepperPin1, HIGH);
digitalWrite(stepperPin2, LOW);

58
digitalWrite(stepperPin3, LOW);
digitalWrite(stepperPin4, LOW);
}
else
{
if(B && C)
{
digitalWrite(stepperPin1, LOW);
digitalWrite(stepperPin2, HIGH);
digitalWrite(stepperPin3, LOW);
digitalWrite(stepperPin4, LOW);
}
else
{
if((!A && B && !C) || (A && !B && C))
{
digitalWrite(stepperPin1, LOW);
digitalWrite(stepperPin2, LOW);
digitalWrite(stepperPin3, HIGH);
digitalWrite(stepperPin4, LOW);
}
else
{
//if(!B && !C)
digitalWrite(stepperPin1, LOW);
digitalWrite(stepperPin2, LOW);
digitalWrite(stepperPin3, LOW);
digitalWrite(stepperPin4, HIGH);
}
}
}
delay(15);
if(A)
{
micSteps++;
}
else
{
micSteps--;
}
}
}
void setFlagTT()
{
flagTT = true;
}
void turn()
{
j = 0;
while ((digitalRead(ttPin) == LOW) && (j < T))
{
digitalWrite(ttPulsePin, HIGH);
delayMicroseconds(tHigh);

59
digitalWrite(ttPulsePin, LOW);
delayMicroseconds(tLow);
j++;
}
flagTT = false;
}

60
APÊNDICE B – RELATÓRIO DE MEDIÇÃO DE COEFICIENTE DE ESPALHAMENTO
SONORO DE INCIDÊNCIA ALEATÓRIA
A câmara reverberante utilizada, localizada na Universidade Tecnológica Federal
do Paraná – UTFPR, possui formato trapezoidal, volume interno de 1,48m³, fator de
escala 5,13 e área de absorção de 0,39m². A medição foi realizada no dia 14 de maio de
2018, utilizando 12 posições de fonte-receptor, durante duas horas e meia. A amostra
utilizada é circular, com 800mm de diâmetro e perfil senoidal, apresentado na Figura 15.
Figura 15 - Perfil da amostra Fonte: Autoria própria.
Os valores de temperatura e umidade podem ser observados na Tabela 3. Os
resultados numéricos, na Tabela 4. O coeficiente de absorção é apresentado na Figura
16 e o espalhamento da amostra na Figura 17.
Ti Posições fonte-receptor
1 2 3 4 5 6 7 8 9 10 11 12
T1 20.6 20.6 20.6 20.6 20.6 20.6 20.6 20.6 20.6 20.6 20.6 20.6
Temperatura T2 20.5 20.5 20.5 20.5 20.5 20.5 20.5 20.5 20.5 20.5 20.5 20.5
[°C] T3 20.6 20.5 20.5 20.5 20.5 20.4 20.5 20.5 20.5 20.4 20.4 20.5
T4 20.6 20.5 20.5 20.5 20.5 20.5 20.5 20.4 20.5 20.5 20.5 20.5
T1 62 62 62 62.1 62.1 62.1 62.1 62.1 62.1 62.1 62.1 62.1
Umidade T2 63.5 63.5 63.5 63.5 63.5 63.5 63.5 63.5 63.5 63.5 63.5 63.5
[%] T3 62.2 62.4 62.5 62.6 62.7 62.7 62.8 62.8 62.9 62.9 63 63
T4 63.1 63.2 63.3 63.3 63.4 63.5 63.4 63.6 63.6 63.6 63.7 63.7 Tabela 3 - Temperatura e umidade durante a medição Fonte: Autoria própria.

61
Banda correspondente à escala real f[Hz]
sbase
[-] αs [-]
αspec [-]
S [-]
100 0.00 0.23 0.27 0.05
125 0.00 0.29 0.33 0.05
160 0.00 0.23 0.26 0.04
200 0.00 0.19 0.21 0.02
250 0.00 0.17 0.19 0.02
315 0.00 0.22 0.24 0.03
400 0.03 0.22 0.28 0.08
500 0.00 0.20 0.44 0.30
630 0.00 0.14 0.50 0.43
800 0.00 0.10 0.59 0.54
1000 0.00 0.10 0.59 0.54
1250 0.01 0.13 0.59 0.52
1600 0.01 0.08 0.61 0.57
2000 0.02 0.05 0.64 0.62
2500 0.02 0.03 0.67 0.66
3150 0.04 0.06 0.69 0.67
4000 0.00 0.00 0.67 0.67
Tabela 4 - Resultado numérico da medição Fonte: Autoria própria.
Figura 16 - Coeficiente de absorção de incidência aleatória Fonte: Autoria própria.

62
Figura 17 - Coeficiente de espalhamento de incidência aleatória Fonte: Autoria própria.