astronomia eofÍsica e iÊncias tmosfÉricas epartamento de ... · eletromagnético no guia de onda...
TRANSCRIPT
UNIVERSIDADE DE SÃO PAULO INSTITUTO DE ASTRONOMIA, GEOFÍSICA E CIÊNCIAS ATMOSFÉRICAS
DEPARTAMENTO DE CIÊNCIAS ATMOSFÉRICAS
ARMANDO HEILMANN
AVALIAÇÃO DO SISTEMA DE DETECÇÃO DE DESCARGAS ATMOSFÉRICAS EM VLF - ZEUS NO
BRASIL
SÃO PAULO AGOSTO/2006
ARMANDO HEILMANN
AVALIAÇÃO DO SISTEMA DE DETECÇÃO DE DESCARGAS ATMOSFÉRICAS EM VLF - ZEUS NO
BRASIL
SÃO PAULO 2006
DDiisssseerrttaaççããoo ddee MMeessttrraaddoo ssuubbmmeettiiddoo àà ccoommiissssããoo ddaa ppóóss--ggrraadduuaaççããoo ddoo DDeeppaarrttaammeennttoo ddee CCiiêênncciiaass AAttmmoossfféérriiccaass ppaarraa aa oobbtteennççããoo ddoo ttííttuulloo ddee MMeessttrree eemm CCiiêênncciiaass AAttmmoossfféérriiccaass.. OOrriieennttaaddoorr:: DDrr.. CCaarrllooss AAuugguussttoo MMoorraalleess RRooddrriigguueezz

EVALUATION OF THE DETECTION SYSTEM OF ATMOSPHERIC DISCHARGES IN VLF -
ZEUS IN BRAZIL

Dedico este trabalho
Á meus pais, que em muitas etapas de minha formação não se permitiram um esmorecimento, mesmo quando as mais desagradáveis surpresas tornaram-se companheiras
indesejáveis, souberam conduzir-me pelo caminho da persistência, dedico. Á “pessoas” na qual pude contar com o incondicional apoio e incentivo e que da mais
sutil maneira deixaram marcas indeléveis em minhas lembranças, meus agradecimentos.
Agradecimentos
Agradeço ao meu orientador Dr. Carlos Augusto Morales Rodriguez pela imensa
clareza e disposição frente este trabalho e de quem tenho tirado todo o tempo necessário para
cumprir as freqüentes exigências da profissão.
Ao Dr. Hérnan Joel Cervantes Rodriguez (IF/USP) pela colaboração e atuação muitas
vezes na espécie de consultor e tradutor de inúmeros problemas na qual foi possível transpor
vários dos inevitáveis embates do projeto.
A CAPES - Fundação Coordenação de Aperfeiçoamento de Pessoal de Nível Superior,
o qual este trabalho não poderia ter sido realizado sem o suporte dessa tradicional instituição,
pelo que desejo expressar meus agradecimentos.
A Furnas Centrais Elétricas S.A e ao Grupo de Eletricidade Atmosférica (ELAT) do
Instituto Nacional de Pesquisas Espaciais (INPE) pela colaboração com os dados da rede
RINDAT que satisfizeram as intenções deste trabalho, bem como ao Observatório Nacional
de Atenas (NOA- Greek Observatory) e a Universidade de Connecticut pelo fornecimento dos
dados do sistema ZEUS.
Aos funcionários do IAG/USP pela prestatividade e em especial à Rosemary Feijó da
Silva Santos pela dedicação e atenção nos esforços e elucidações prestadas.
Aos Doutores da banca pela atenção despendida ao meu compromisso de trabalho e
pesquisa.
Á meus amigos especiais que sutilmente não deixaram sucumbir meus objetivos, Ieda
Pscheidt, André Carlos Lehum, Ezequiel Burkarter, Fabiano Thomazzi, Rogério Mazur,
Carlos Alberto Jousseph Coelho e Gustavo Zampier dos Santos Lima.
Epicuro (341 a.C - 270 a.C), filósofo, escritor.
“Os grandes navegadores devem sua reputação aos temporais e tempestades”. Titus Lucretius Carus (Lucrécio, 98 – 55 a.C), poeta e filósofo.
“Se era Júpiter que atirava o relâmpago, por que espalharia seus dardos flamejantes de uma maneira tão caprichosa e pródiga sobre o mar vazio e sobre templos a ele dedicados? E por que esperava até que as nuvens espessas e escuras cobrissem o céu antes de atirar suas faíscas? ...”. Sir Isaac Newton (1643 - 1727), físico e matemático.
“O raio deve ser composto de um fluído elétrico, embora não consiga explicar sobre como uma coisa tão vaporosa e instável como uma nuvem atue como uma máquina de fricção capaz de gerar eletricidade ”. Charles François de Cister Du Fay (1698 - 1729), físico.
“Deve haver alguma utilidade na eletricidade, [...], pois falam tanto sobre ela.” Dr. Karl B. McEachron (1889 - 1954), engenheiro da General Electric.
“Se ouvir o trovão, o relâmpago não o atingiu. Se viu o relâmpago, é por que escapou dele. E se o relâmpago o atingiu,... bem, você não saberá!”. Dr. Martin Uman (abertura da International Conference for Atmospheric Electricity - 1999).
“O relâmpago afeta a camada de Ozônio? O que causa os Sprites? Quanto de óxido nítrico é produzido pelas descargas atmosféricas? Quando estas perguntas forem respondidas, poderemos alterar fundamentalmente nossa compreensão de como a eletricidade interage com a atmosfera...”. Albert Einstein, (1879-1955). Físico, matemático e humanista alemão.
"O segredo da criatividade é saber como esconder as suas fontes".
RESUMO
Descargas elétricas irradiam pacotes de energia em todo o espectro eletromagnético, sendo
que na faixa de freqüência do Very Low Frequency (VLF) produzem um ruído denominado
sferics. Estes sferics se propagam a grandes distâncias através de múltiplas reflexões entre o
guia de onda formado pela superfície terrestre e a baixa ionosfera. Através de receptores de
rádio na freqüência de VLF (5-15 kHz) instalados no continente Africano e Europeu, a rede
de monitoramento de descargas atmosféricas de longa distância – ZEUS está continuamente
monitorando sferics sobre o 1/3 do globo terrestre. A partir deste monitoramento, este projeto
de pesquisa almeja avaliar o desempenho do sistema ZEUS sobre o Brasil. A avaliação da
rede ZEUS será feita a partir de análises teóricas que envolvem a propagação do sinal
eletromagnético no guia de onda formado pela superfície da terra e a ionosfera e partir de
comparações com a Rede Integrada Nacional de Detecção de Descargas Atmosféricas –
RINDAT. Nas análises teóricas foram desenvolvidos modelos de Monte-Carlo que simulam
os erros inerentes ao sistema, em diferentes configurações de propagação (dia e noite, saltos-
ionosféricos e propagação sob a superfície terrestre). Como resultados, são elaborados mapas
de erros de localização para as diferentes configurações de sensores utilizados. Finalmente, as
comparações com a rede RINDAT permítem inferir os erros experimentais que foram
utilizados para se investigar a fonte de erro do sistema ZEUS. Os resultados obtidos indicam
que a rede ZEUS possui um erro de localização médio entre 66.18 km com desvio padrão de
32.18 km sobre o sudeste brasileiro, assumindo que a rede RINDAT representa a verdade
terrestre. Por outro lado, as simulações teóricas que utilizam um erro teórico do sistema
(20µs) indicavam erros de localização de 20-30 km, o que representa um erro 2 a 3 vezes
menor que o esperado. Posteriormente inferiu-se qual seria o erro real do sistema e novas
simulações de Monte-Carlo foram realizadas, o que produziu distribuições de erro similares as
observadas experimentalmente e com um erro médio de ~ 58 km e desvio padrão ~ 30 km. A
variação dos erros de localização para os períodos de transição da noite para o dia e dia para a
noite se deve às variações da ionosfera que não estão completamente bem ajustadas no
algoritmo de localização de descargas atmosféricas da rede ZEUS. Por fim o cálculo de um
novo valor de erro médio para as ATDs foi proposto e a distribuição dos erros médios de
localização de sferics sobre o Brasil indicam ser entre 70 e 90 km, com uma média de 78 km
para a região Sudeste.
Palavras-chaves: descargas atmosféricas, sferics, arrival time diference (ATD) e VLF.
ABSTRACT
Electric discharges irradiate packages of energy in the whole electromagnetic spectrum, and
in the strip of frequency of Very Low Frequency (VLF) they produce a noise denominated
sferics. These sferics spread at great distances through multiple reflections among the wave
guide formed by the terrestrial surface and the low ionosphere. Through receivers of radio in
the frequency of VLF (5-15 kHz) installed in the African and European continent, the net of
monitor of atmospheric discharges of long distance - ZEUS is continually monitoring sferics
on the 1/3 of the globe. Starting from this monitoring, this research project longs for to
evaluate the acting of the system ZEUS on Brazil. The evaluation of the net ZEUS will be
made starting from theoretical analyses that involve the propagation of the electromagnetic
sign in the wave guide formed by the surface of the earth and the ionosphere and to leave of
comparisons with the Net Integrated National of Detection of Atmospheric Discharges -
RINDAT. In the theoretical analyses they were developed models of Monte-Carlo that
simulate the inherent errors to the system, in different propagation configurations (day and
night, ionospheric jump and propagation under the terrestrial surface). As results, maps of
location errors are elaborated for the different configurations of sensor used. Finally, the
comparisons with the net RINDAT allow to infer the experimental errors that were used to
investigate the source of errors of the system ZEUS. The obtained results indicate that the net
ZEUS possesses a error of medium location among 66.18 km with standard deviation of 32.18
km on the Brazilian southeast, assuming that the net RINDAT represents the terrestrial truth.
On the other hand, the theoretical simulations that use a theoretical error of the system (20 s)
they indicated errors of location of 20-30 km, what represents a error 2 to 3 times smaller than
the expected. Later it was inferred which would be the real error of the system and new
simulations of Monte-Carlo were accomplished, what produced observed similar error
distributions experimentally them and with a medium error of ~ 58 km and standard deviation
~ 30 km. The variation of the location error for the transition periods of the night for the day
and day for the night is due to the variations of the ionosphere that are not completely well
adjusted in the algorithm of location of atmospheric discharges of the net ZEUS. Finally the
calculation of a new value of medium errors for ATDs was proposed and the distribution of
the medium error of sferics location on Brazil indicates to be between 70 and 90 km, with an
average of 78 km for the Southeast area.
LISTA DE FIGURAS
Figura. 1.1 – Estágios de uma nuvem: (a) ao saturar-se, a massa de ar úmido que se elevou da superfície aquecida da Terra cria uma nuvem cúmulos, estágio inicial, (b) estágio maduro, (c) inicia-se o processo de dissipação devido ao decréscimo das correntes ascendente que levam ar úmido ou aumento da temperatura. (setas vermelhas – ar quente, setas azuis – ar frio)........6
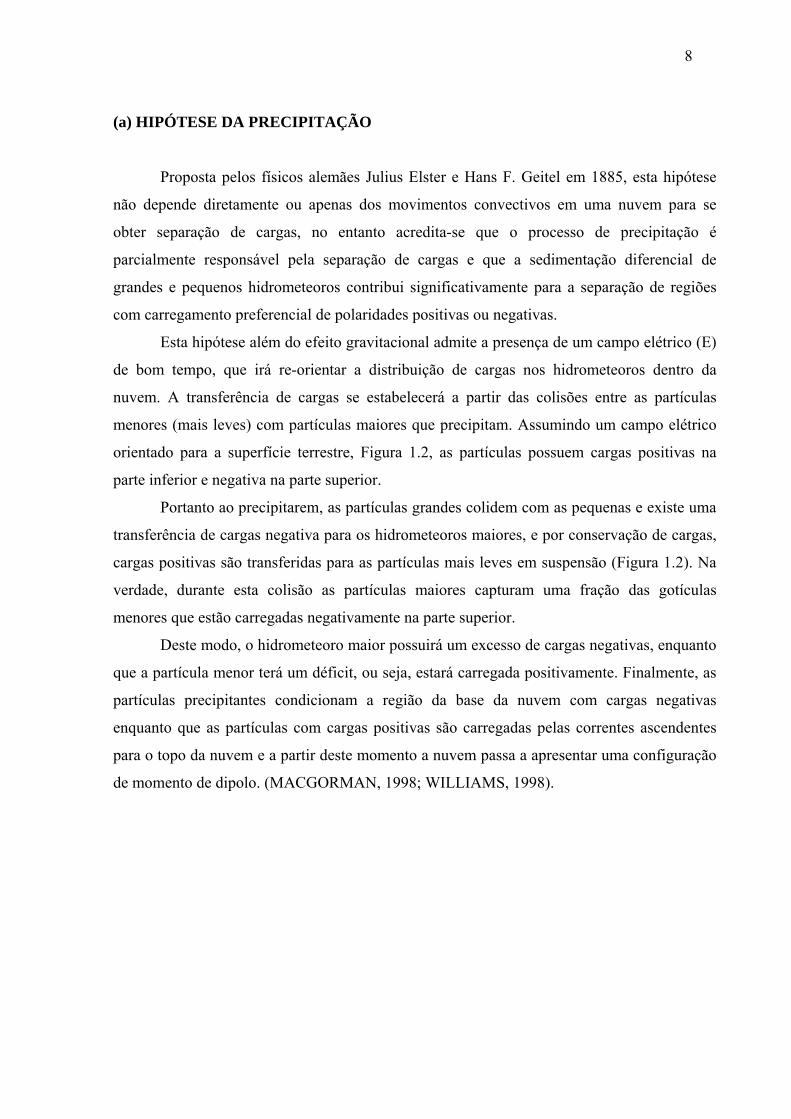
Figura. 1.2 - Hipótese da Precipitação. Sugerindo que a gravidade induz um movimento descendente das gotas de chuva e cristais de gelo (precipitantes), provoca a colisão com partículas menores de água e cristais de gelo em suspensão. A presença de um Campo Elétrico direcionado para a terra induz a transferência de cargas negativas para as partículas precipitantes e positivas para as partículas em suspensão. No detalhe a transferência de carga por colisão entre partículas precipitantes (polarizadas pelo campo elétrico) e gotículas de água/cristais de gelo em suspensão na nuvem............................................................................9
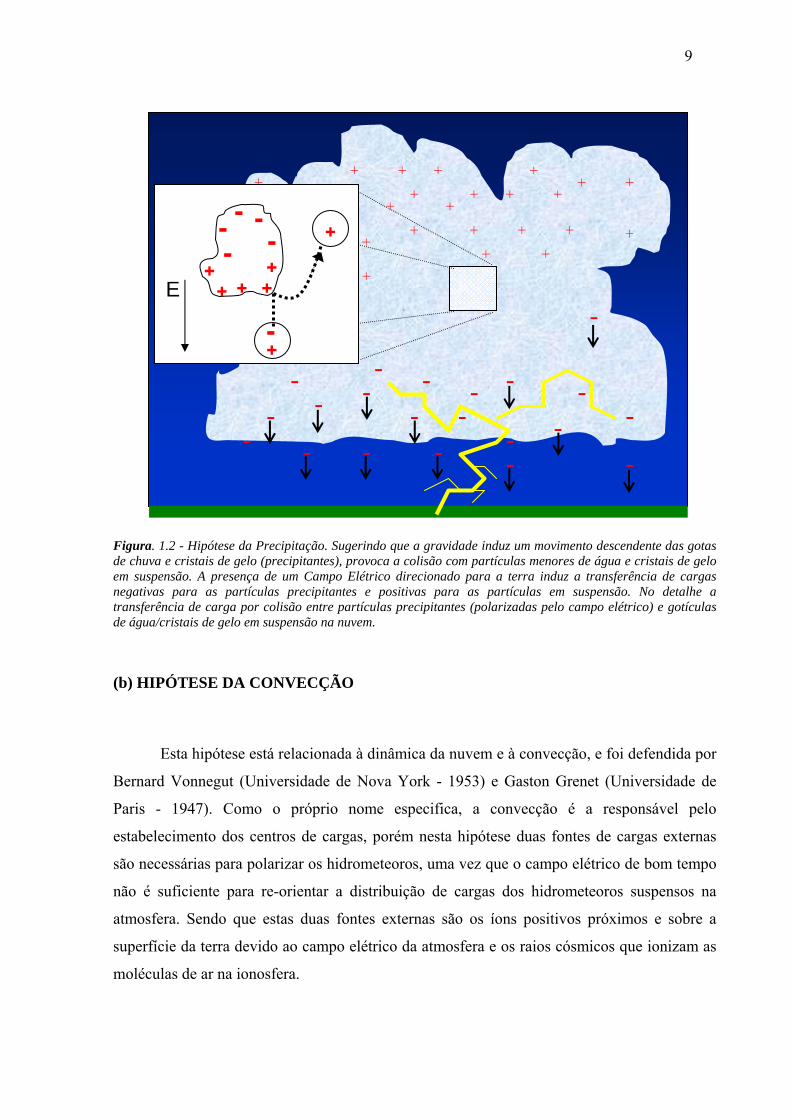
Figura. 1.3 – Hipótese da Convecção. Propõe que as correntes ascendentes de ar quente introduzem íons livres positivas (provenientes da superfície da terra) até o topo da nuvem, os íons livres negativos liberadas pelo processo de ionização dos raios cósmicos (topo) são atraídos para dentro da nuvem e se agregam aos cristais de gelo e gotículas superesfriadas, formando uma camada negativa e sendo transportada pelas correntes descendentes para baixo...................................................................................................................................................11
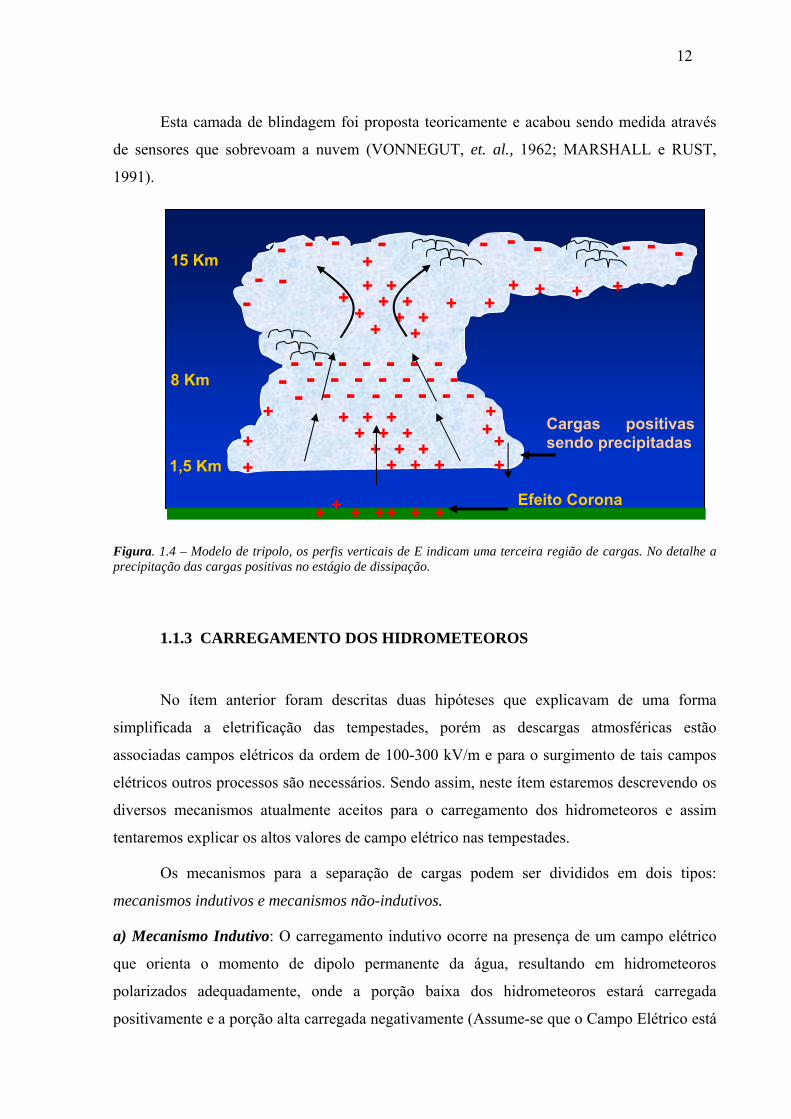
Figura. 1.4 – Modelo de tripolo, os perfis verticais de E indicam uma terceira região de cargas. No detalhe a precipitação das cargas positivas no estágio de dissipação.....................12
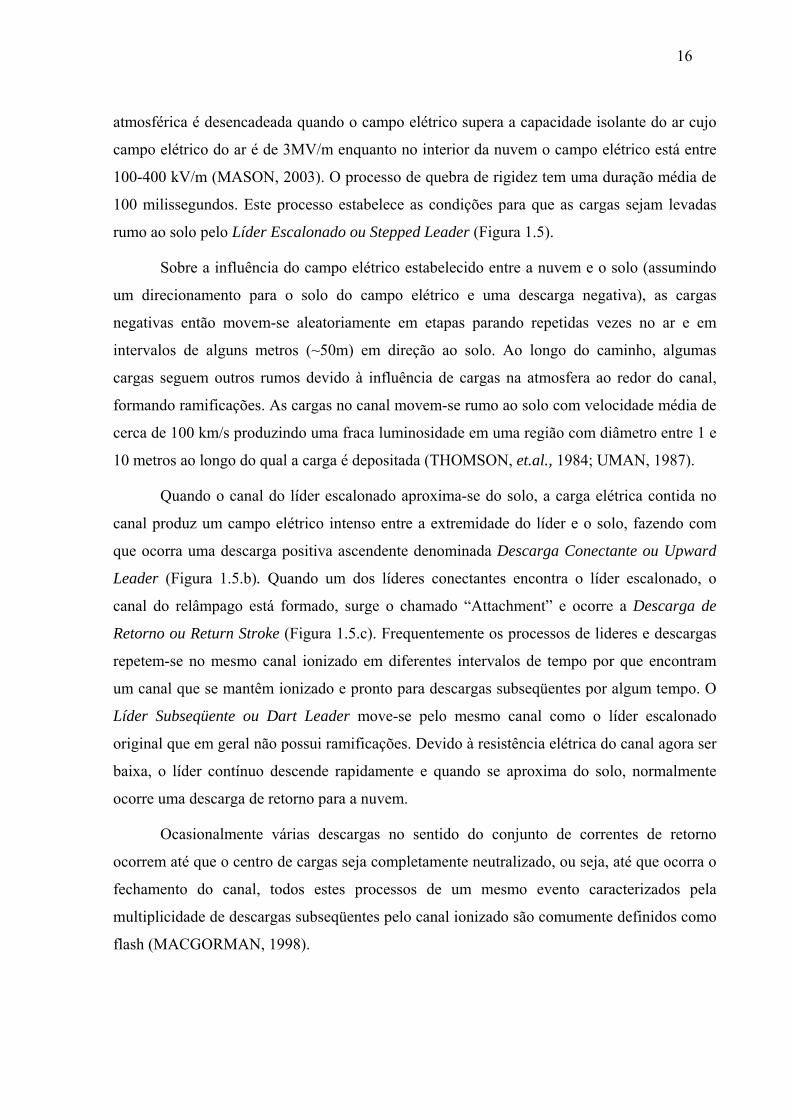
Figura. 1.5 – Uma descarga atmosférica do tipo nuven-solo (NS), admitindo uma estrutura bipolar da nuven de tempestade. Em (a) o líder escalonado (saltando e parando em intervalos), na seqüência (b) ocorre uma descarga conectante devido à proximidade do líder escalonado em seguida ocorre à descarga propriamente dita chamada de descarga de retorno. (c) repetidas descargas subseqüentes de retorno são conhecidas como Flash...............................................17
Figura. 2.1 – Espectro eletromagnético representando suas freqüências características, regiões não-ionizantes e regiões ionizantes..............................................................................21
Figura. 2.2 - A figura representa o Espectro de Potência (Watt) versus Freqüência (kHz), para os usuais espectros eletromagnéticos provenientes de uma descarga atmosférica. Os alcances de 100, 400 e 5000 km correspondem respectivamente às ondas com freqüência no VHF, LF e VLF...........................................................................................................................................22
Figura. 2.3 – Tipos de ondas de rádio que representam meio pela qual ocorrem as devidas propagações eletromagnéticas. .................................................................................................23
Figura. 2.4 – Ondas de Superfície: propagam-se acompanhando a curvatura da Terra sem obstruções. Estas ondas possuem um alcance limitado (400 km). É possível utilizar a onda de superfície para comunicações em freqüências até alguns megahertz.......................................25
Figura 2.5 - Comportamento das Ondas de Céu, admitindo um salto na ionosfera e a propagação em ambas as direções do sinal eletromagnético característico de uma descarga atmosférica. ..............................................................................................................................26
Figura. 2.6 – Distribuição vertical das camadas na atmosfera e regiões na ionosfera. ...........29
Figura. 2.7 – Distribuição de descargas atmosféricas observadas pelo OLS referente ao período de 12 meses para 1989 (fonte: http://wwwghcc.msfc.nasa.gov/ols.html)...................31
Figura. 2.8 – Operational Linescan System – OLS lançado a bordo do Titan 2. ....................31
Figura. 2.9 – Distribuição de descargas atmosféricas observadas pelo OTD referente ao período entre janeiro/dezembro de 1999 ..................................................................................33
Figura. 2.10 –Optical Transient Detector – OTD a bordo do satélite microlab ......................33
Figura. 2.11 – Distribuição de descargas atmosféricas anual observadas pelo LIS para 2004 (fonte: http://thunder.nsstc.nasa.gov/data/query/distributions.html)........................................34
Figura. 2.12 –Lightning Imaging Sensor – LIS a bordo do satélite TRMM...........................35
Figura. 2.13 – Fast On-orbit Recording of Transient Events – FORTE a bordo do satellite PegasusXL. ...............................................................................................................................36
Figura 2.14 - Localização dos sensores de detecção de descargas atmosféricas da RINDAT...................................................................................................................................................38
Figura. 2.15 – Antenas do sistema SIDDEM: (a) Sensor Safir instalado no morro do Mirante em SC, (b) Sensor Impact instalado em Campo Grande MS. ..................................................38
Figura. 2.16 – Localização dos sensores, no detalhe a área de cobertura da RINDAT. (Com Permissão, PINTO, et al., 2003)...............................................................................................39
Figura. 2.17 – Configuração dos processadores de dados da Rede RINDAT. (Com Permissão, PINTO, et al., 2003). ................................................................................................................39
Figura. 2.18 – Localização dos sensores da rede WWLLN. ...................................................40
Figura. 2.19 – Localização dos sensores de VLF da rede ZEUS ............................................42
Figura. 2.20 - Sensores de VLF que fazem parte da Rede ZEUS. ..........................................42
Figura. 2.21 –Time of Arrival – TOA, Distribuição de uma rede de sensores que utilizam este método que considera a diferença na chegada do sinal eletromagnético VLF/LF e a medida do campo elétrico vertical das ondas de superfície proveniente de uma descarga atmosférica. No detalhe o sistema de equações que representam à diferença de tempo e seus respectivos sensores.....................................................................................................................................44
Figura. 2.22 – Magnetic Direction Finding – MDF, Antenas de loop-cruzado (1,2 e 3) detectando o campo magnético proveniente da descarga. (No detalhe o método que considera o ângulo formado entre a direção do canal da descarga e as espiras da antena (φ1, φ2 e φ3)).45
Figura. 2.23 – ATDs sobre o globo representado por hipérboles e cuja intersecção identifica a localização de um sferic. ..........................................................................................................47
Figura. 2.24 – Configuração dos sensores da rede ZEUS: a) sensores que fazem parte da configuração EUROPA, b) sensores que fazem parte da configuração ÁFRICA....................48
Figura. 2.25 – A figura mostra uma descarga atmosférica e dois receptores do sinal de rádio. Os relógios acima indicam os tempos T1, T2 e TO, que os sensores 1e 2 receberam o sinal a partir de um tempo inicial da descarga, respectivamente. ........................................................49
Figura. 2.26 – Comportamento das ATDs na forma de hipérboles sobre o globo, cuja intersecção identifica a localização de uma descarga atmosférica (fonte de sferic). Configuração Europa da rede ZEUS. .......................................................................................50
Figura. 2.27 – Comportamento das ATDs na forma de hipérboles sobre o globo, cuja intersecção identifica a localização de uma descarga atmosférica (fonte de sferic). Configuração África da rede ZEUS..........................................................................................50
Figura. 2.28 – Sensor do tipo IMPACT, localizado em Campo Grande - MT. ......................53
Figura. 2.29 – Sensores do tipo SAFIR, localizado na região de Entre Rios do Sul (Norte do Rio Grande do Sul). ..................................................................................................................53
Figura. 3.1: Arquitetura do hardware e a dinâmica de processamento da rede ZEUS............56
Figura. 3.2. Comportamento temporal do campo elétrico para um sinal de VLF oriundo da mesma descarga atmosférica e recebida por sensores em diferentes localizações...................56
Figura. 3.3 – Comportamento da variação da altura da ionosfera às 19h00min UTC. A escala a esquerda representa a altura da ionosfera em km ..................................................................59
Figura. 3.4 – Idem a Figura 3.3, porém para as 08h00min UTC.............................................59
Figura. 3.5 – Distribuição dos erros das ATDs, no detalhe o desvio padrão com 20.018 µseg...................................................................................................................................................61
Figura. 3.6 – Distribuição do erro médio de localização (km) para a configuração África com 7 sensores assumindo saltos ionosféricos para uma atmosfera às 19h00min UTC..................63
Figura. 3.7 – Idem Figura 3.6, porém para uma atmosfera às 08h00min UTC.......................63
Figura. 3.8 – Idem 3.6, porém para configuração com 7 sensores Europa 08h00min. ...........64
Figura. 3.9 Idem à Figura 3.8, porém para as 19h00min UTC................................................64
Figura. 3.10 – Distribuição do erro médio de localização (km) para a configuração África com 7 sensores assumindo propagação sobre a superfície terrestre tomando a forma esféricas...................................................................................................................................................66
Figura. 3.11 – Idem Figura 3.10, porém para configuração Europa com 7 sensores. .............66
Figura. 3.12- Distribuição do erro médio de localização (km) para a configuração África com 7 sensores assumindo propagação sobre a superfície terrestre tomando a forma geodésica....68
Figura. 3.13 – Idem Figura 3.12, porém para a configuração Europa com 7 sensores. ..........68
Figura. 3.14 - Distribuição do erro médio de localização (km) para a configuração África com 7 sensores às 19:00 UTC. Os erros foram simulados utilizando ATDs teóricas sem ionosfera e ATDs medidas com ionosfera................................................................................70
Figura. 3.15 – Idem 3.14, porém para uma simulação às 08h00min UTC..............................70
Figura.3.16 – Idem Figura 3.14, porém para a configuração Europa com 7 sensores. ...........71
Figura. 3.17 - Idem Figura 3.15, porém para a configuração Europa com 7sensores.............71
Figura. 3.18 – Distribuição espacial do erro médio de localização (km) para a configuração África com 7 sensores, às 19h00min UTC. Estes erros foram simulados utilizando ATDs teóricas com ionosfera e ATDs medidas sem ionosfera...........................................................74
Figura. 3.19 – Distribuição espacial do erro médio de localização (km) para a configuração África com 7 sensores, às 08h00min UTC. Os erros foram simulados utilizando ATDs teóricas com ionosfera e ATDs medidas sem ionosfera...........................................................75
Figura. 3.20 - Distribuição espacial do erro médio de localização (km) para a configuração Europa com 7 sensores, às 19h00min UTC. Estas distribuições espaciais dos erros foram simuladas utilizando ATDs teóricas com ionosfera e ATDs medidas sem ionosfera. .............75
Figura. 3.21 – Distribuição espacial do erro médio de localização (km) para a configuração Europa com 7 sensores, às 08h00min UTC. Os erros foram simulados utilizando ATDs teóricas com ionosfera e ATDs medidas sem ionosfera...........................................................76
Figura. 4.1 – Mapa da distribuição de descargas atmosféricas observadas pelo sistema RINDAT para o dia 10 de dezembro de 2004 entre os períodos de 19h45min e 20h00min UTC. .........................................................................................................................................82
Figura. 4.2 – Mapa da distribuição de descargas atmosféricas observadas pelo sistema ZEUS para o dia 10 de dezembro de 2004 entre os períodos de 19h45min e 20h00min UTC. As elipses representam os erros característicos de posição aonde as ATDs se encontram paralelas...................................................................................................................................................83
Figura. 4.3 – Mapa da distribuição de descargas atmosféricas observadas simultaneamente pelos sistemas RINDAT (em azul) e ZEUS (em vermelho). Dados referentes ao dia 10 de dezembro de 2004 entre os períodos de 19h45min e 20h00min. .............................................84
Figura. 4.4 – Mapa da acumulação de descargas atmosféricas observadas pelo sistema RINDAT para o período de Julho de 2004 à Janeiro de 2005..................................................86
Figura. 4.5 – Mapa da acumulação de descargas atmosféricas observadas pelo sistema ZEUS p ara o período de Julho de 2004 à Janeiro de 2005.................................................................86
Figura. 4.6 – Distribuição espacial do número de medidas coincidentes entre os sistemas RINDAT e ZEUS utilizando os critérios de 0.1 mili-segundos de janela temporal e 300 km na diferença de observação............................................................................................................87
Figura. 4.7 Distribuição espacial do erro médio de localização da rede ZEUS a partir das medidas coincidentes obtidas na Figura 4.6. ............................................................................88
Figura.. 4.8. Distribuição de freqüência do erro de localização da rede ZEUS para as medidas coincidentes entre os sistemas ZEUS e RINDAT. (a) (esquerda) distribuição de freqüência; (b) (direita) distribuição de freqüência cumulativa do erro......................................................89
Figura. 4.9 – Histogramas que comparam os resultados entre RINDAT/ZEUS e das simulações teóricas, utilizando saltos ionosféricos. Na vertical a freqüência de distribuição dos erros em (%), tomando as configurações da Europa, com 7 sensores. ..............................91
Figura. 4.10 – Histogramas que comparam os resultados entre RINDAT/ZEUS e das simulações teóricas, utilizando saltos ionosféricos. Na vertical a freqüência de distribuição dos erros em (%), tomando as configurações da África, com 7 sensores.................................92
Figura. 4.11 – Histogramas que comparam os resultados entre RINDAT/ZEUS e das simulações teóricas, utilizando saltos ionosféricos. Na vertical a freqüência de distribuição dos erros em (%), tomando as configurações da Europa, com 6 sensores (combinação 1346811)...................................................................................................................................93
Figura. 4.12 – Histogramas que comparam os resultados entre RINDA/ZEUS e das simulações teóricas, utilizando saltos ionosféricos. Na vertical a freqüência de distribuição dos erros em (%), tomando as configurações da Europa, com 6 sensores (combinação 2346811)...................................................................................................................................94
Figura. 4.13 – Histogramas que comparam os resultados entre RINDA/ZEUS e das simulações teóricas, utilizando saltos ionosféricos. Na vertical a freqüência de distribuição dos erros em (%), tomando as configurações da África, com 6 sensores (combinação 4678911)...................................................................................................................................95
Figura. 4.14 – Histogramas que comparam os resultados entre RINDA/ZEUS e das simulações teóricas, utilizando saltos ionosféricos. Na vertical a freqüência de distribuição dos erros em (%), tomando as configurações da África, com 6 sensores (combinação 46891011).................................................................................................................................96
Figura. 4.15 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da Europa, com 5 sensores (124811)............97
Figura. 4.16 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da Europa, com 5 sensores (146811)............98
Figura. 4.17 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da África, com 5 sensores (468911). ............99
Figura. 4.18 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da África, com 5 sensores (4891011). ..........99
Figura. 4.19 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da Europa, com 4 sensores (3468)..............101
Figura. 4.20 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da Europa, com 4 sensores (14811)............101
Figura. 4.21 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da África, com 4 sensores (4789). ..............102
Figura. 4.22 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da África, com 4 sensores (46811). ............103
Figura. 4.23 – Distribuição temporal dos erros médios de localização obtidos dos dados disponíveis com as configurações de 4,5,6 e 7 sensores de VLF...........................................105
Figura. 4.24 – Distribuição dos erros corrigidos para as ATDs, obtido com todas as combinações de sensores de VLF e cuja média e desvio padrão indicam o novo valor com a qual será re-calculado os erros médios. ..................................................................................106
Figura. 4.25 – Distribuição espacial do erro médio teórico de localização obtida para todas as configurações de sensores e soluções continentais analisadas nos itens 4.3, a partir de um erro na ATD de 45.809 µs..............................................................................................................108
Figura. 4.26 – Distribuição dos erros médios encontrados para o caso teórico (todos os sensores) e experimental (ZEUS/RINDAT), admitindo um erro teórico na ATD de 45.809µs.................................................................................................................................................108
Figura. A.1 – Triângulo esférico formado pela longitude e latitude. Define os locais sobre a superfície terrestre sendo possível o cálculo da distância entre seus respectivos pontos.......119
Figura. B.1 – Distribuição do erro médio para a configuração África com 6 sensores, (Unidade em Km). Estas isolinhas foram simuladas utilizando propagação sobre a superfície terrestre tomando a forma esférica da Terra...........................................................................124
Figura. B.2 – Distribuição do erro médio para a configuração África com 5 sensores, (Unidade em Km). Estas isolinhas foram simuladas utilizando propagação sobre a superfície terrestre tomando a forma esférica da Terra...........................................................................125
Figura. B.3 – Distribuição do erro médio para a configuração África com 4 sensores, (Unidade em Km). Estas isolinhas foram simuladas utilizando propagação sobre a superfície terrestre tomando a forma esférica da Terra...........................................................................126
Figura. B.4 – Distribuição do erro médio para a configuração Europa com 6 sensores, (Unidade em Km). Estas isolinhas foram simuladas utilizando propagação sobre a superfície terrestre tomando a forma esférica da Terra...........................................................................127
Figura. B.5 – Distribuição do erro médio para a configuração Europa com 5 sensores, (Unidade em Km). Estas isolinhas foram simuladas utilizando propagação sobre a superfície terrestre tomando a forma esférica da Terra...........................................................................128
Figura. B.6 – Distribuição do erro médio para a configuração Europa com 4 sensores, (Unidade em Km). Estas isolinhas foram simuladas utilizando propagação sobre a superfície terrestre tomando a forma esférica da Terra...........................................................................129
LISTA DE TABELAS
Tabela 3.1: Verificação dos dados obtidos pelas figuras 3.14 e 3.15 que consideram as simulações para as 19h00min UTC e 08h00min UTC, respectivamente para a configuração África. .......................................................................................................................................72
Tabela 3.2: Verificação dos dados obtidos pelas figuras 3.16 e 3.17 que consideram as simulações para as 19h00min UTC e 08h00min UTC, respectivamente para a configuração Europa.......................................................................................................................................73
Tabela 3.3: Verificação dos dados obtidos pelas figuras 3.18 e 3.19 que consideram as simulações para as 19h00min UTC e 08h00min UTC, respectivamente para a configuração África. .......................................................................................................................................77
Tabela 3.4: Verificação dos dados obtidos pelas figuras 3.20 e 3.21 que consideram as simulações para as 19h00min UTC e 08h00min UTC, respectivamente para a configuração Europa.......................................................................................................................................78
Tabela 4.1 – Exemplo da comparação entre os dados obtidos pela Rede RINDAT e ZEUS, para o dia 25/12/2004 às 18h24min UTC, expressando a latitude e longitude de localização de uma descarga atmosférica para RINDAT e ZEUS respectivamente, em seguida, os números que expressam as possíveis combinações de sensores para a Rede ZEUS, no dia especificado, bem como o valor estimado da velocidade de fase e desvio padrão proposta pela mesma. Por último, os valores da diferença no tempo e espaço entre as medias feitas por RINDAT e ZEUS, respectivamente. ...........................................................................................................85
Tabela C.1: Apresentação dos dados de “strokes” da rede RINDAT para o dia 31/12/2004 às 21h00min, sobre a região sudeste do Brasil. ..........................................................................130
Tabela C.2: Apresentação dos dados de “strokes” da rede ZEUS para o dia 31/12/2004 às 21h00min, sobre a região sudeste do Brasil. ..........................................................................130
Tabela C.3 : Resultados para os sensores da Europa e África (casos teóricos, medidos e corrigidos) com 6 sensores. ....................................................................................................131
Tabela C.4: Resultados apresentados para os sensores da Europa e África para os casos, teóricos, medidos e corrigidos, com 5 sensores. ....................................................................133
Tabela C.5.a: Resultados apresentados para os sensores da Europa para os casos, teóricos, medidos e corrigidos, com 4 sensores. ...................................................................................134
Tabela C.5.b: Resultados apresentados para os sensores da África para os casos, teóricos, medidos e corrigidos, com 4 sensores. ...................................................................................135
LISTA DE ABREVIATURAS SFERICS – Rádio Atmospherics CEMIG - Companhia Energética de Minas Gerais LIS – Lightning Imaging Sensor OTD – Optical Transient Detector OLS - Operational Linescan System FORTE – Fast On-orbit Recording of Transient Events WWLL – World Wide Lightning Network TOGA – Time of Group Arrival ATD – Arrival Time Difference SIDDEM – Sistema de Informação Integrada Baseado no Sistema de Detecção de Descargas Atmosféricas RINDAT – Rede Integrada de Detecção de Descargas Atmosféricas SAFIR - Sureveillance at Alerte Fourde par Interférometrie Radiolélectrique MDF – Magnetic Direction Finding GPS - Global Positioning System IMPACT - Improved Accuracy from Combined Technology IN - Relâmpago Intra-Nuvem ou dentro da nuvem LF - Low Frequency E - Campo Elétrico LPATS - Lightning Positioning and Tracking System MDF - Magnetic Direction Finder NLDN - National Lightning Detection Network NS - Relâmpago Nuvem-Solo SN – Relâmpago solo-nuvem NN – Relâmpago nuvem-nuvem NCL – Nível de Condensação por Levantamento NC - Nível de Condensação RINDAT - Rede Integrada Nacional de Detecção de Descargas Atmosféricas TOA - Time of Arrival (Tempo de Chegada) VLF - Very Low Frequency ED – Eficiência de Detecção RF – Rádio freqüência CCD - Charge Coupled device LDAR – Lightning Detection and Ranging PDD - Photo Diode Detector DMPS – Defense Meteorological Satellite Program TRMM - Tropical Rainfall Measuring Mission LLS - Lightning Location System SIMEPAR - Sistema Meteorológico do Paraná FURNAS - Furnas Centrais Elétricas S.A INPE - Instituto Nacional de Pesquisas Espaciais
NOMENCLATURA ADOTADA A seguir uma proposta de nomenclatura dos termos técnicos de maior emprego na literatura
aplicada. Esta terminologia será utilizada ao longo deste trabalho.
Em Português
Em Inglês
Definição
Descarga Atmosférica
ou Relâmpago
Lightning
Conceito correspondente ao fenômeno do fluxo de corrente e fechamento do canal de descarga e nas descargas subseqüentes. Está associado também ao fenômeno elétrico, visual e sonoro. O relâmpago é um efeito luminoso perceptível visualmente em função da corrente de retorno no canal de descarga.
Descarga elétrica
Electric discharge
Fluxo de cargas a partir de um objeto carregado eletricamente, que pode corresponder a processo disruptivo em meio isolante ou descarregamento através de meio condutor. Embora seja de emprego comum na mídia para designar as descargas atmosféricas, o mesmo não é considerado um termo adequado para designar o fenômeno por não conferir qualquer caráter de especificidade ao significado da descarga.
Descarga atmosférica
Flash
Referência à descarga atmosférica de retorno (“return stroke”) envolvido após o fechamento do canal. Este tipo de descarga pode ser constituído de uma ou mais descargas (“strokes”) pelo canal.
Raio Stroke Fluxo de corrente elétrica que percorre um canal ionizado entre a nuvem e o solo. Isto ocorre quando o campo elétrico é suficientemente forte para quebrar a rigidez dielétrica do ar.
ÍNDICE
CAPÍTULO 1 ..........................................................................................................................1
INTRODUÇÃO ........................................................................................................................1 1.1 ELETRIFICAÇÃO DAS TEMPESTADES...............................................................1
1.1.1 AS PRIMEIRAS NOÇÕES...................................................................................1
1.1.2 ELETRIFICAÇÃO DAS TEMPESTADES..........................................................4
1.1.3 CARREGAMENTO DOS HIDROMETEOROS................................................12
1.2 OS PROCESSOS DE UMA DESCARGA ATMOSFÉRICA .................................15
1.3 RADIO ATMOSPHERICS ......................................................................................17
1.4 OBJETIVOS.............................................................................................................18
CAPÍTULO 2 ........................................................................................................................19
PROPAGAÇÃO DAS ONDAS ELETROMAGNÉTICAS NO GUIA DE ONDA (TERRA – IONOSFERA)......................................................................................................19
2.1 O ESPECTRO DAS ONDAS ELETROMAGNÉTICAS........................................20
2.2 FENÔMENOS ASSOCIADOS À PROPAGAÇÃO DO VLF ................................22
2.2.1 ONDAS DE SUPERFÍCIE..................................................................................24
2.2.2 ONDAS DE CÉU ................................................................................................25
2.3 A IONOSFERA E A PROPAGAÇÃO A LONGAS DISTÂNCIAS ......................27
2.4 OS SISTEMAS E OS MÉTODOS PARA MONITORAR DESCARGAS ATMOSFÉRICAS................................................................................................................30
2.4.1 SISTEMAS ÓTICOS DE LOCALIZAÇÃO.......................................................30
2.4.2 SISTEMAS DE RÁDIO-LOCALIZAÇÃO ........................................................36
a) SISTEMAS DE MONITORAMENTO DAS DESCARGAS ATMOSFÉRICAS ..37
b) OS MÉTODOS E TÉCNICAS PARA MONITORAMENTO DAS DESCARGAS ATMOSFÉRICAS........................................................................................................43
c) OS INSTRUMENTOS PARA O MONITORAMENTO DAS DESCARGAS ATMOSFÉRICAS........................................................................................................52
CAPÍTULO 3 ......................................................................................................................54
DADOS E METODOLOGIA................................................................................................54 3.1 DESCRIÇÃO DOS DADOS COLETADOS...........................................................54
3.2 ALGORITMO DE LOCALIZAÇÃO DE DESCARGAS ATMOSFÉRICAS........58
3.3 MODELO DE MONTE-CARLO.............................................................................60
3.4 DISTRIBUIÇÃO DOS ERROS MÉDIOS DE LOCALIZAÇÃO...........................62
3.4.1 PROPAGAÇÃO ATRAVÉS DE SALTOS IONOSFÉRICOS ..........................62
3.4.2 PROPAGAÇÃO SOBRE A SUPERFÍCIE: ESFERA........................................65
3.4.3 PROPAGAÇÃO SOBRE A SUPERFÍCIE: GEÓIDE........................................67
3.4.4 EFEITO DA IONOSFERA: GEÓIDE X IONOSFERA.....................................69
3.4.5 EFEITO DA IONOSFERA: IONOSFERA X GEÓIODE.................................74
CAPÍTULO 4 ......................................................................................................................80
RESULTADOS E DISCUSSÕES .........................................................................................80 4.1 RESULTADOS E DISCUSSÕES............................................................................80
4.2 ERROS EXPERIMENTAIS ....................................................................................80
4.3 DISTRIBUIÇÃO ESPACIAL DOS ERROS DE LOCALIZAÇÃO .......................88
4.4 DEPENDÊNCIA DOS ERROS EM FUNÇÃO DAS SOLUÇÕES ........................90
4.4.1 7 SENSORES ......................................................................................................91
4.4.2 6 SENSORES ......................................................................................................93
4.4.3 5 SENSORES ......................................................................................................96
4.4.4 4 SENSORES ....................................................................................................100
4.5 DEPENDÊNCIA TEMPORAL DOS ERROS.......................................................103
4.6 DISTRIBUICAO DOS ERROS DAS ATDS.........................................................105
4.7 ERROS DE LOCALIZAÇÃO DA ZEUS AJUSTADOS PARA O BRASIL .......107
CAPÍTULO 5 ......................................................................................................................109
CONCLUSÃO.......................................................................................................................109 5.1 ALGORITMO DE LOCALIZAÇÃO A PARTIR DO MÉTODO DA ATD. .......109
5.2 DISTRIBUIÇÃO DOS ERROS DE LOCALIZAÇÃO EXPERIMENTAL..........111
5.3 DEPENDÊNCIA TEMPORAL DOS ERROS DE LOCALIZAÇÃO...................112
5.4 DISTRIBUIÇÃO DO ERRO DE LOCALIZAÇÃO DA REDE ZEUS AJUSTADO PARA O BRASIL. .............................................................................................................112
CAPÍTULO 6 ......................................................................................................................113 6.1 REFERÊNCIAS BIBLIOGRÁFICAS ......................................................................113
APÊNDICE ...........................................................................................................................119 APÊNDICE A – EQUAÇÕES PARA PROPAGAÇÃO SOBRE A SUPERFÍCIE TERRESTRE (TRIÂNGULOS ESFÉRICOS – FORMA ESFÉRICA) ............................119
APÊNDICE A – EQUAÇÕES PARA PROPAGAÇÃO SOBRE A SUPERFÍCIE TERRESTRE (TRIÂNGULOS ESFÉRICOS – FORMA GEÓIDE) ................................121
APÊNDICE A – EQUAÇÕES PARA PROPAGAÇÃO ATRAVÉS DE SALTOS IONOSFÉRICOS ...............................................................................................................121
APÊNDICE B.....................................................................................................................124
APÊNDICE C.....................................................................................................................130

1
CAPÍTULO 1
INTRODUÇÃO 1.1 ELETRIFICAÇÃO DAS TEMPESTADES
1.1.1 AS PRIMEIRAS NOÇÕES Nas civilizações antigas já eram conhecidas às propriedades elétricas de alguns
materiais. A palavra eletricidade deriva do vocábulo grego elektron (âmbar), como
conseqüência da propriedade que tem essa substância de atrair partículas de pó ao ser atritado
com fibras de lã.
O cientista inglês William Gilbert, primeiro a estudar sistematicamente a eletricidade e
o magnetismo em 1600, verificou que outros materiais, além do âmbar, adquiriam, quando
atritados, a propriedade de atrair outros corpos, e chamou a força observada de elétrica.
Atribuiu essa eletrificação à existência de um "fluido" que, depois de removido de um corpo
por fricção, deixava uma "emanação". Embora a linguagem utilizada seja curiosa, as noções
de Gilbert se aproximam dos conceitos modernos, desde que a palavra “fluido” seja
substituída por "carga", e emanação por "campo elétrico".
No século XVIII, o francês Charles François de Cisternay Du Fay comprovou a
existência de dois tipos de força elétrica: uma de atração, já conhecida, e outra de repulsão.
Suas observações foram depois organizadas por Benjamin Franklin, que atribuiu sinais -
positivo e negativo - para distinguir os dois tipos de carga. Nessa época, já haviam sido
reconhecidas duas classes de materiais: isolantes e condutores.
Benjamin Franklin (1706–1790) comprovou experimentalmente a hipótese de que a
eletricidade poderia ser drenada de uma nuvem colocando um mastro metálico abaixo de uma
tempestade e aproximando desta um corpo aterrado (em contato com o solo para escoar a
eletricidade do mastro). Thomas-François D’Álibard (1703-1799) realizou este experimento e
2
conseguiu obter o efeito esperado, estavam concebidos os pára-raios, que objetivava proteger
as grandes construções da ação das descargas elétricas. Ao empinar uma pipa durante uma
tempestade em Junho de 1752 na Pensylvania, Franklin demonstrou de forma subseqüente,
que o relâmpago é um fenômeno elétrico resultado do desequilíbrio elétrico entre a nuvem e o
solo.
Também em 1752, L.G.Lemonnier repetiu o experimento de Franklin com o mastro
metálico, mas ao invés de aproximar um fio aterrado, colocou um pouco de poeira para ver se
ela seria atraída. Ele descobriu que mesmo quando não havia nuvens, situação conhecida
como Condição de tempo bom, existia uma fraca eletrização na atmosfera. Em 1775,
G.Beccaria confirmou a existência de uma variação diurna de tal eletrificação na condição de
tempo bom e determinou que a polaridade da carga elétrica na atmosfera nestas condições era
positiva e que ela mudava para negativa quando havia tempestades próximas, em
concordância com as observações de Franklin.
Em 1800, o conde Alessandro Volta inventou a pilha elétrica, transformada por outros
pesquisadores em fonte de corrente elétrica de aplicação prática. Em 1820, André-Marie
Ampére demonstrou as relações entre correntes paralelas em 1831. Michael Faraday fez
descobertas que levaram ao desenvolvimento do dínamo, do motor elétrico e do
transformador. Ainda em 1820, Jean Baptiste Biot (1774-1862) e Félix Savart (1791-1841)
formularam, a partir de observações experimentais, a lei que leva seus nomes e que permite o
cálculo de campos magnéticos produzidos por correntes elétricas. James Clerk Maxwell
(1865) encerrou um ciclo da história da eletricidade ao formular as equações que unificam e
descrevem os comportamentos elétrico e magnético da matéria.
Em 1860, W. Thomson (conhecido como Lord Kelvin) defendeu a idéia de que cargas
positivas deveriam existir na atmosfera para explicar sua eletrificação em tempo bom. Ele foi
o primeiro a reconhecer a eletrificação da atmosfera como uma manifestação de um campo
elétrico.
O aproveitamento dos novos conhecimentos na indústria e na vida cotidiana se iniciou
no fim do século XIX. Em 1873, o cientista belga Zénobe Gramme demonstrou que a
eletricidade podia ser transmitida de um ponto a outro através de cabos condutores aéreos. Em
1879, o americano Thomas Edson inventou a lâmpada incandescente e, dois anos depois,
construiu, na cidade de Nova York, a primeira central de energia elétrica com sistema de
distribuição. A eletricidade já tinha aplicação no campo das comunicações a partir do
telégrafo e do telefone, progressivamente este conhecimento foi introduzido nas fábricas e
3
residências. Em 1885, J.Elster e H.F. Geitel propuseram a primeira teoria para explicar a
estrutura elétrica das tempestades. Em 1887, W.Linss estimou que a Terra perdesse quase
toda a sua carga para a atmosfera condutora em menos de uma hora, a menos que a fonte de
cargas fosse restabelecida. Este fato deu origem ao que se denomina problema fundamental
da eletricidade atmosférica, isto é, como a carga negativa da Terra é mantida.
A partir de uma câmera, H.H.Hoffert, conseguiu observar descargas atmosféricas em
1889. Mais tarde em 1897, F.Pockels estimou pela primeira vez a intensidade máxima da
corrente de um relâmpago no solo, através da medida do campo magnético residual produzido
por relâmpagos em rochas basálticas. Finalmente em 1899, J.Elster e H.F.Geitel descobriram
que a radioatividade está presente na atmosfera, estabelecendo com isso uma explicação para
a presença de íons na atmosfera. Em 1890, Joseph John Thomson descobriu o elétron e este
fato marcou a passagem da ciência da eletricidade para o das propriedades eletrônicas,
conhecimento este precursor dos grandes avanços tecnológicos.
Robert Millikan e seu aprendiz Harvey Fletcher, em 1906, tentaram medir a carga de
um único elétron através de uma gotícula com um pequeno excesso de elétrons. Como
resultado admitiu-se a carga do elétron negativa e de natureza quantizada. Estes estudos
contribuíram para a descoberta posterior do Pósitron em 1932 que assumia a mesma carga do
elétron exceto que esta é positiva.
Em 1911, Ernest Rutherford propôs um modelo para o átomo, sugerindo que os
elétrons orbitavam um núcleo carregado, com um diâmetro de 1/100.000. 000.000.000
metros, da mesma forma que os planetas orbitavam o Sol. Rutherford também sugeriu que o
núcleo era formado por prótons, sendo que cada um teria uma carga do tipo positiva.
Esta visão estabilizou a força elétrica que mantém um átomo unido. Posterior a
Rutherford e seu modelo atômico, Niels Bohr propôs que os elétrons ocupam apenas certas
órbitas em torno do núcleo, e que outras órbitas são impossíveis. Até os dias mais atuais
existem descobertas no campo do eletromagnetismo e eletricidade atmosférica, como, por
exemplo, citam-se as descoberta nos anos 90 dos sprites e mais recentemente ainda a emissão
de raios gama acima das nuvens de tempestade, cogitando-se sua origem também das
descargas atmosféricas (SMITH, et, al., 2006).
4
1.1.2 ELETRIFICAÇÃO DAS TEMPESTADES
As tempestades são caracterizadas por nuvens que apresentam desenvolvimento
vertical acentuado e contam com a presença de descargas atmosféricas, ou seja, relâmpagos.
Durante o desenvolvimento destas tempestades o campo elétrico aumenta devido ao
estabelecimento de regiões com centros de carga de sinais opostos. Após um determinado
tempo o campo elétrico gerado é suficientemente grande para romper a constante dielétrica do
ar, ocasionando assim uma descarga atmosférica.
De uma forma simplificada uma nuvem de tempestade inicia-se a partir da elevação de
uma parcela de ar quente e úmida, que pode ter se originado do aquecimento do ar próximo à
superfície, ou por efeitos orográficos (topografia) ou mesmo por efeitos dinâmicos, ou seja, o
deslocamento de frentes frias ou quentes. À medida que esta parcela de ar se eleva na
atmosfera, esta parcela sofre expansão em decorrência da diminuição da pressão atmosférica
com a altura e a temperatura resfria-se por uma expansão adiabática, uma vez que não existe
troca de calor com o ambiente nem mudança de fase.
O resfriamento da parcela do ar provoca uma diminuição da capacidade da parcela em
reter o vapor de água e conseqüentemente ocorre um aumento da umidade relativa do ar. Ao
atingir uma umidade relativa de 100% a parcela torna-se saturada e a condensação pode
ocorrer, sendo que este nível é comumente definido como nível de condensação por
levantamento (NCL) (Figura 1.1.a). Caso a parcela de ar esteja mais quente que o ar ambiente,
a mesma se eleva, e a condensação inicia-se. Dessa maneira, o vapor d’água disponível nesta
parcela de ar começa a condensar sobre aerossóis hidroscópicos conhecidos como núcleos de
condensação de nuvem (NCN). Portanto as primeiras gotículas de nuvens (raio de ~ 10-20
µm) começam a crescer e fica estabelecido o processo de crescimento de gotículas por
condensação. Durante esta mudança de fase ocorre uma liberação de calor latente
proporcional à água condensada, logo a taxa de resfriamento da parcela é diminuída e o
processo de expansão torna-se um processo pseudo-adiabático ou adiabático úmido.
Enquanto a parcela de ar levantada estiver com uma temperatura maior que o
ambiente, ou seja, atmosfera absolutamente instável, a nuvem pode se desenvolver
verticalmente.
À medida que a parcela se eleva e o processo de condensação se torna dominante, as
gotículas de nuvem começam a crescer em tamanho o que poderá desencadear o processo de
coalescência. Para isso, as gotinhas de nuvem têm que atingir raios superiores a 60 µm para
5
que a eficiência de colisão e coalescência se tornem eficaz. Portanto ao atingir estas
dimensões, as gotículas maiores começam a colidir com as menores (como as gotículas
maiores tem maior massa, estas possuem diferentes velocidades o que pode aumentar a
chance de colisões), e coalescem, ou seja, capturam as partículas menores. Este processo é de
extrema importância para o alargamento da distribuição de tamanho de gotículas e
conseqüente formação de gotas de chuva para nuvens quentes (nuvens que se desenvolvem a
tempeturas maiores que 0oC).
Com o desenvolvimento da nuvem, a parcela de ar se eleva e conseqüente pode
ultrapassar a isoterma de 0oC. Ao atingir esta altitude existe uma alta probabilidade da
formação de cristais de gelo dentro desta parcela. Isto se deve ao fato que a parcela de ar está
saturada em relação à água, porém está supersaturada em relação ao gelo. Este resultado é
uma resposta à pressão de vapor de saturação do gelo ser menor do que da água, logo ocorrerá
uma maior difusão de vapor para gelo, isto é, formação de cristais de gelo a partir da
deposição de vapor sobre núcleos de gelo (NG). Conseqüentemente, a parcela se torna um
ambiente altamente instável e partículas de gelo começam a crescer à custa das gotículas de
nuvem (estas começam a evaporar para manter o nível de saturação da parcela). Durante este
processo, algumas gotículas de nuvem se congelam e outras parcialmente, ou seja,
denominadas de gotículas de nuvem super-resfriadas. Sendo que entre 0 e -15oC é comum
observar a presença de gotículas de água, gotículas de água super-resfriadas e cristais de gelo,
porém se a parcela de ar atingir temperaturas abaixo de -40 oC, somente vapor d’água e
cristais de gelo coexistem. Sendo assim, ao ultrapassar a isoterma de 0 oC, a nuvem é definida
como nuvem fria, e os processos de formação de gelo tornam-se dominantes. Sendo que além
da deposição do vapor e congelamento das gotículas, a colisão entre estes diversos
hidrometeoros pode iniciar os processos de agregação e acreção. Sendo que a agregação é o
processo de colisão entre cristais de gelo que se agregam (formação de flocos de neve),
enquanto que a acreção é a colisão de cristais de gelo com gotículas de água super-resfriadas
(formação de granizo).
Dessa forma, a tempestade pode ser definida como uma nuvem fria que se iniciou em
uma fase quente e possui gotículas de água e cristais de gelo. A precipitação irá ocorrer
quando os hidrometeoros atingirem uma massa suficiente, força da gravidade, para
balancearem a força de empuxo, corrente ascendente, e assim precipitarem. Em geral as gotas
ou cristais de gelo devem atingir diâmetros da ordem de 1 mm, ou seja, velocidade terminal
da ordem alguns metros por segundo.
6
A tempestade se desenvolverá verticalmente até que a temperatura da parcela de ar
dentro da nuvem seja igual ou menor que o ar ambiente, assim atingindo o nível de equilíbrio.
Nas tempestades, este estágio se caracteriza pela definição da maturação, e a massa de ar
levantada começa a ser expandir lateralmente, e assim forma-se a “bigorna”.
Este movimento horizontal, além de formar a bigorna poderá induzir os movimentos
descendentes laterais à nuvem. Sendo que uma parte do ar irá se misturar com a nuvem, ou
seja, entranhará, e conseqüentemente este entranhamento irá diluir a nuvem (irá evaporar),
que poderá se intensificar. Com o entranhamento, existe um aumento do vapor d’água devido
à evaporação ou sublimação e com isso aumenta-se a supersaturação do meio novamente e as
partículas começam a crescer por condensação ou deposição de vapor.
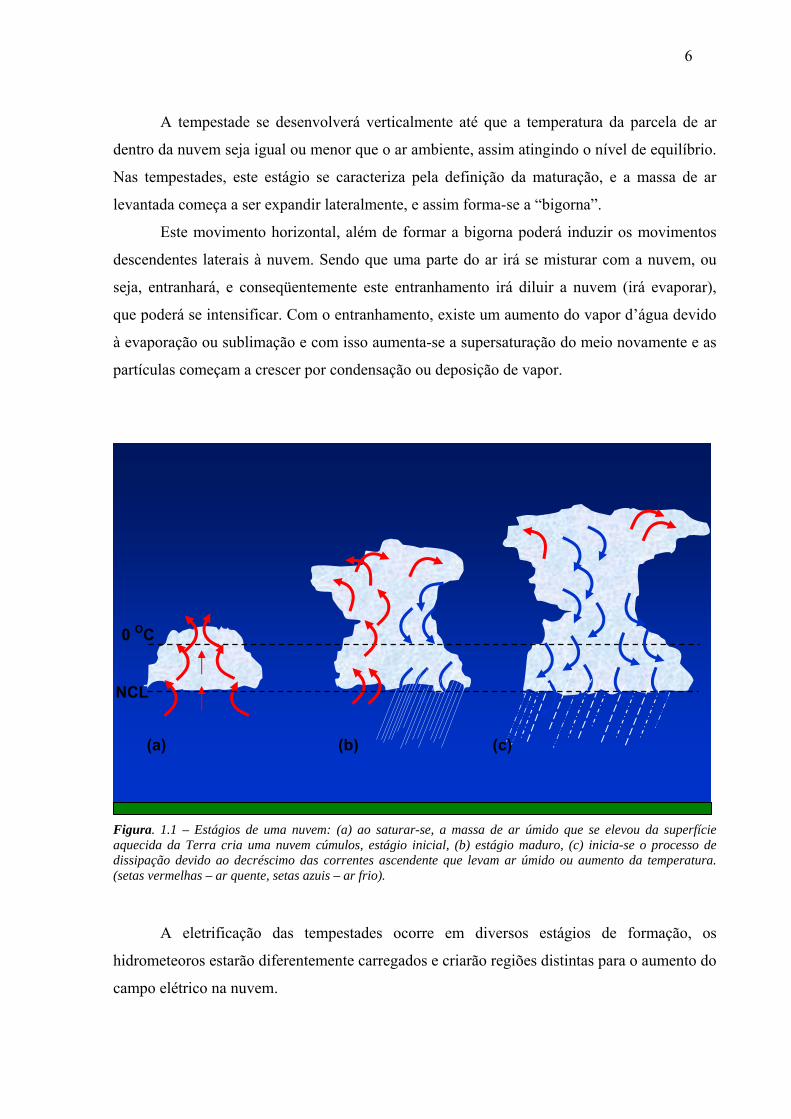
Figura. 1.1 – Estágios de uma nuvem: (a) ao saturar-se, a massa de ar úmido que se elevou da superfície aquecida da Terra cria uma nuvem cúmulos, estágio inicial, (b) estágio maduro, (c) inicia-se o processo de dissipação devido ao decréscimo das correntes ascendente que levam ar úmido ou aumento da temperatura. (setas vermelhas – ar quente, setas azuis – ar frio).
A eletrificação das tempestades ocorre em diversos estágios de formação, os
hidrometeoros estarão diferentemente carregados e criarão regiões distintas para o aumento do
campo elétrico na nuvem.
0 OC
(c) (a) (b)
NCL
7
A ocorrência de uma descarga atmosférica só será possível quando o campo elétrico da
nuvem for suficiente para quebrar a rigidez dielétrica do ar. Admitindo-se que inicialmente o
ar é um dielétrico e o Esolo (campo elétrico) próximo à superfície terrestre está entre 10–15
kV/m a descarga ocorre quando o EIN (campo elétrico dentro da nuvem) for maior que o Ear
(campo elétrico do ar). Dessa maneira o ar que inicialmente era um isolante transforma-se em
condutor. Como conseqüência, os íons negativos e os elétrons livres do ar são fortemente
atraídos pelas cargas positivas presentes nas nuvens ou induzidas no solo, formando um
caminho chamado de canal condutor.
Os relâmpagos podem iniciar-se na nuvem e fluírem para o solo (relâmpago nuvem-
solo - NS), do solo para a nuvem (SN) (são descargas raras, usualmente ocorrem no topo das
montanhas e em edifício altos) (MACGORMAN, 1998). Descargas dentro da nuvem
(relâmpagos intra-nuvem - IN) ou a partir de um ponto na nuvem para outro ponto da nuvem
denominam-se (relâmpago nuvem-nuvem - NN).
Os relâmpagos NS podem ser classificados quanto ao tipo de carga neutralizada na
nuvem. São classificados como negativos caso sejam neutralizadas cargas do centro de cargas
negativas e como relâmpagos positivos, caso sejam neutralizadas cargas do centro de cargas
positivas. Relâmpagos NS positivos têm chamado à atenção, pois estão associados à corrente
contínua (duração de centenas de mili-segundos) que está relacionado com as queimadas em
florestas e sérios danos em linhas de transmissão (UMAN, 1971).
Do ponto de vista fenomenológico, existem duas hipóteses que são utilizadas para
explicar a eletrificação das nuvens de tempestades: (a) hipótese da Precipitação e (b) hipótese
da Convecção. Em geral estas hipóteses admitem uma estrutura elétrica das nuvens na forma
de um dipolo elétrico vertical com o centro de cargas positivo na parte superior da nuvem,
acima de um centro de carga negativa ou até mesmo um centro secundário de cargas positivas
abaixo de centro de cargas negativas (MACGORMAN, 1998; WILLIAMS, 1988):
8
(a) HIPÓTESE DA PRECIPITAÇÃO
Proposta pelos físicos alemães Julius Elster e Hans F. Geitel em 1885, esta hipótese
não depende diretamente ou apenas dos movimentos convectivos em uma nuvem para se
obter separação de cargas, no entanto acredita-se que o processo de precipitação é
parcialmente responsável pela separação de cargas e que a sedimentação diferencial de
grandes e pequenos hidrometeoros contribui significativamente para a separação de regiões
com carregamento preferencial de polaridades positivas ou negativas.
Esta hipótese além do efeito gravitacional admite a presença de um campo elétrico (E)
de bom tempo, que irá re-orientar a distribuição de cargas nos hidrometeoros dentro da
nuvem. A transferência de cargas se estabelecerá a partir das colisões entre as partículas
menores (mais leves) com partículas maiores que precipitam. Assumindo um campo elétrico
orientado para a superfície terrestre, Figura 1.2, as partículas possuem cargas positivas na
parte inferior e negativa na parte superior.
Portanto ao precipitarem, as partículas grandes colidem com as pequenas e existe uma
transferência de cargas negativa para os hidrometeoros maiores, e por conservação de cargas,
cargas positivas são transferidas para as partículas mais leves em suspensão (Figura 1.2). Na
verdade, durante esta colisão as partículas maiores capturam uma fração das gotículas
menores que estão carregadas negativamente na parte superior.
Deste modo, o hidrometeoro maior possuirá um excesso de cargas negativas, enquanto
que a partícula menor terá um déficit, ou seja, estará carregada positivamente. Finalmente, as
partículas precipitantes condicionam a região da base da nuvem com cargas negativas
enquanto que as partículas com cargas positivas são carregadas pelas correntes ascendentes
para o topo da nuvem e a partir deste momento a nuvem passa a apresentar uma configuração
de momento de dipolo. (MACGORMAN, 1998; WILLIAMS, 1998).
9
Figura. 1.2 - Hipótese da Precipitação. Sugerindo que a gravidade induz um movimento descendente das gotas de chuva e cristais de gelo (precipitantes), provoca a colisão com partículas menores de água e cristais de gelo em suspensão. A presença de um Campo Elétrico direcionado para a terra induz a transferência de cargas negativas para as partículas precipitantes e positivas para as partículas em suspensão. No detalhe a transferência de carga por colisão entre partículas precipitantes (polarizadas pelo campo elétrico) e gotículas de água/cristais de gelo em suspensão na nuvem.
(b) HIPÓTESE DA CONVECÇÃO
Esta hipótese está relacionada à dinâmica da nuvem e à convecção, e foi defendida por
Bernard Vonnegut (Universidade de Nova York - 1953) e Gaston Grenet (Universidade de
Paris - 1947). Como o próprio nome especifica, a convecção é a responsável pelo
estabelecimento dos centros de cargas, porém nesta hipótese duas fontes de cargas externas
são necessárias para polarizar os hidrometeoros, uma vez que o campo elétrico de bom tempo
não é suficiente para re-orientar a distribuição de cargas dos hidrometeoros suspensos na
atmosfera. Sendo que estas duas fontes externas são os íons positivos próximos e sobre a
superfície da terra devido ao campo elétrico da atmosfera e os raios cósmicos que ionizam as
moléculas de ar na ionosfera.
+ +
+
+ +
+
+ +
+ +
+ + +
+ +
+
+ + + +
+ + +
+
+
+
- --
-
- -
- --
-- -
- - -
- -
- -
-
- + +
- -
+
+ -
+ +
+
- - -
E
10
O processo de carregamento inicia-se quando uma parcela de ar mais quente que o ar
ambiente começa a se elevar e íons positivos próximos à superfície são inseridos dentro desta
parcela (pode ser carregado livremente, ou mesmo estarem acoplados aos aerossóis).
Conseqüentemente, a parcela de ar se satura e existe a formação de gotículas de nuvem. Estas
gotículas então tornam-se carregadas positivamente. À medida que a nuvem se desenvolve
verticalmente ela penetra em níveis mais altos na troposfera e começa a atrair os íons
negativos, gerados pela ionização das moléculas de ar, que tem maior mobilidade naquela
altura.
Assim os íons negativos começam a formar uma camada de blindagem na periferia da
nuvem. Com o desenvolvimento da tempestade, ou seja, estabelecimento dos movimentos
ascendentes e descendentes, os íons negativos começam a entranhar dentro da nuvem e
regiões ou centros começam a ser formar, Figura 1.3. Adicionalmente, os hidrometeoros
começam a colidir e a transferência de cargas vista na hipótese anterior também se inicia.
Portanto, nesta hipótese também temos uma distribuição de dipolo positivo, ou seja, cargas
positivas no topo da nuvem e negativa na base. Porém o entranhamento do ar e os
movimentos descendentes transportam os íons negativos para o interior da nuvem, e podem
assim estabelecer várias regiões de cargas positivas e negativas.
11
Figura. 1.3 – Hipótese da Convecção. Propõe que as correntes ascendentes de ar quente introduzem íons livres positivas (provenientes da superfície da terra) até o topo da nuvem, os íons livres negativos liberadas pelo processo de ionização dos raios cósmicos (topo) são atraídos para dentro da nuvem e se agregam aos cristais de gelo e gotículas superesfriadas, formando uma camada negativa e sendo transportada pelas correntes descendentes para baixo.
A hipótese da convecção é mais aceita hoje em dia, pois explica a estrutura elétrica
das tempestades sem a presença de um campo elétrico que re-orienta a distribuição de cargas
nos hidrometeoros (MACGORMAN, 1998; WILLIAMS, 1998).
Observações do campo elétrico no interior de nuvens sugerem um modelo de dipolo
ou tripolo eletrostático conforma mostra a Figura 1.4 (WILLIAMS, 1998). O modelo de
dipolo eletrostático possui uma camada de concentração de cargas negativas
aproximadamente entre os níveis de temperatura de -10oC e -25oC e uma camada de cargas
positivas em temperaturas inferiores a -25oC enquanto o modelo de tripolo eletrostático
admite uma segunda concentração de cargas positivas, porém de magnitude menor que a
anterior, entre os níveis de temperatura de 0oC e -10oC. Existem concordâncias a respeito de
uma camada de cargas na região superior da nuvem e que é conhecida como camada de
blindagem que por sua vez é induzida pelas cargas situadas no topo da nuvem, descritas no
modelo de tripolo eletrostático e que induzem esta camada a adquirir uma polaridade oposta
na fronteira superior da nuvem.
+ + + + + +
+ + + + + +
+
+ + +
+ + + + +
+ + +
+
+
+
+
+
+
+
+
+
+
+
+
+ +
+
+
+
+ +
- -- - -- - -
- --
--- -
- ---
--
- ---
---
-- -
-
--
---
-- - -- --
--
--- - -- -
-
- - - -
12
Esta camada de blindagem foi proposta teoricamente e acabou sendo medida através
de sensores que sobrevoam a nuvem (VONNEGUT, et. al., 1962; MARSHALL e RUST,
1991).
Figura. 1.4 – Modelo de tripolo, os perfis verticais de E indicam uma terceira região de cargas. No detalhe a precipitação das cargas positivas no estágio de dissipação.
1.1.3 CARREGAMENTO DOS HIDROMETEOROS
No ítem anterior foram descritas duas hipóteses que explicavam de uma forma
simplificada a eletrificação das tempestades, porém as descargas atmosféricas estão
associadas campos elétricos da ordem de 100-300 kV/m e para o surgimento de tais campos
elétricos outros processos são necessários. Sendo assim, neste ítem estaremos descrevendo os
diversos mecanismos atualmente aceitos para o carregamento dos hidrometeoros e assim
tentaremos explicar os altos valores de campo elétrico nas tempestades.
Os mecanismos para a separação de cargas podem ser divididos em dois tipos:
mecanismos indutivos e mecanismos não-indutivos.
a) Mecanismo Indutivo: O carregamento indutivo ocorre na presença de um campo elétrico
que orienta o momento de dipolo permanente da água, resultando em hidrometeoros
polarizados adequadamente, onde a porção baixa dos hidrometeoros estará carregada
positivamente e a porção alta carregada negativamente (Assume-se que o Campo Elétrico está
- - -- - -
- - -- - -
- - -- - -
- - -- -
- - ---- - --- - -
- + +
+
+ +
+ +
+ +
+
+
+ +
+ +
+ +
+ +
+ +
+ +
+
+ +
+ + +
+
+ + + + + + + Efeito Corona
1,5 Km
8 Km
15 Km
+ + + + + +
Cargas positivas sendo precipitadas
13
orientado para a superfície terrestre), conforme Figura 1.2. Essencialmente os hidrometeoros
admitem composições associadas à determinada quantidade de água e possuem polaridade de
carga devida estar ou não na presença de um campo elétrico. Durante a colisão de partículas
de diferentes polarizações e tamanhos, inseridos num campo elétrico inicial, partículas
maiores (velocidade de queda maior) adquirem cargas negativas e migram para a base da
nuvem enquanto partículas menores adquirem cargas positivas que são carregadas para as
regiões mais altas da nuvem pelas correntes ascendentes. Desta forma a nuvem adquire uma
estrutura bipolar de eletrificação e embora seja um mecanismo eficiente no que tange a
separação de cargas, as limitações para este tipo de transferência residem num tempo
adequado de contato para que ocorra a efetiva transferência de cargas bem como a
dependência do ângulo de contato e magnitude de polarização pelo campo elétrico.
(MACGORMAN, 1998; MASON, 2003; WILLIAMS, 1988).
b) Mecanismo Não-Indutivo: Neste mecanismo não existe a necessidade de um campo
elétrico, porém para a separação de cargas é necessária uma colisão seguida da separação de
partículas. O conhecimento sobre este tipo de mecanismo de separação de cargas é resultado
de experiências controladas de colisão entre partículas e que estabelece alguns parâmetros de
dependência como, por exemplo, o tamanho das partículas, o conteúdo de água líquida no
interior da nuvem, a temperatura e a velocidade de impacto entre as partículas (MARSHAL,
et. al., 1978; REYNOLDS, et. al., 1957). Ao contrário do que ocorre no mecanismo indutivo,
a transferência de carga é mais rápida no mecanismo não-indutivo. Dentro deste tipo de
carregamento, encontram-se: mecanismos de captura de íons, mecanismo de transferência
íon-partícula e mecanismo indutivo de partícula-partícula.
c) Mecanismo de Captura de Íons: Quando uma quantidade igual de íons positivos e
negativos está presente, pode ocorrer uma polarização preferencial nas gotículas (efeito
Wilson). Os hidrometeoros que se precipitam, em relação a íons que se movem em sentido
ascendente sob influência dos ventos e do campo elétrico, tornam-se polarizados devido um
campo elétrico, assim íons que apresentam mesmo sinal, como os sinais da parte inferior dos
hidrometeoros, são repelidos e íons com sinais opostos são atraídos e capturados. Ocorre que
para este mecanismo ser evidente o movimento dos íons deve ser menor que a velocidade dos
hidrometeoros, caso contrário pode ocorrer que os íons de mesma polaridade que a parte
inferior dos hidrometeoros podem ser capturados na parte superior (topo) do hidrometeoro.
14
Em tempestades a concentração de íons é insuficiente para que ocorra uma captura seletiva de
íons, desta forma o mecanismo de captura seletiva de íons descreve de maneira parcial o
desenvolvimento do campo elétrico dentro de uma nuvem de tempestade.
d) Mecanismo de Transferência Íon-Partícula: Quando íons gasosos são capturados ou
emitidos por hidrometeoros denomina-se mecanismo de transferência de cargas íon-partícula.
Este processo pode distribuir cargas sistematicamente em diferentes regiões de uma
tempestade sem haver o deslocamento dos hidrometeoros. Embora nem todas as distribuições
de cargas sejam originadas por este processo (MACGORMAN, 1998).
e) Mecanismo Indutivo Partícula-Partícula: Hidrometeoros que sofrem interação com outras
partículas caracterizam o mecanismo de transferência de cargas partícula-partícula. O grau de
polarização está relacionado à existência de um campo elétrico ambiente. Devido esta
interação relacionar cargas opostas ou de mesma polaridade, ocorre interações e afastamentos
entre as partículas e a indução de cargas em hidrometeoros é modificada com a aproximação
de um outro hidrometeoro, sendo que este pode estar com uma velocidade terminal de queda
diferente de outros hidrometeoros envolvidos no processo. Este processo também se
denomina transferência por precipitação e, portanto, a transferência de cargas neste
mecanismo é marcada principalmente pelo grau de polarização das partículas cuja indução de
cargas nos hidrometeoros é modificada durante a aproximação de outro hidrometeoro
(MACGORMAN, 1998).
f) Carregamento Durante Derretimento: Sugere que o gelo carrega-se positivamente quando
ocorre derretimento. O processo ocorre quando bolhas de CO2 libertam-se do gelo e devido à
superfície molhada do gelo se quebram, esta camada de bolhas que se quebram carrega
consigo cargas de sinal negativo, implicando que as partículas de gelo adquirem um excesso
de cargas positivas (MACGORMAN, 1998).
g) Efeito Termo – Elétrico: Outra propriedade microfísica que pode ser responsável pela
transferência de cargas é o efeito termo-elétrico. Este efeito sugere que a água possui
moléculas que podem se dissociar em Cátions (H+) e Ânions (OH-), se estes elementos
possuem diferentes mobilidades, eles terão diferentes taxas de difusão ao longo de um
gradiente térmico. Desta forma acaba existindo uma separação de cargas de acordo com o
gradiente de temperatura imposto. O que ocorre é que na fase líquida a mobilidade é muito
15
pequena, no entanto no gelo a mobilidade do Cátion é muito maior que a do Ânion e se
houver um gradiente de temperatura ao longo de um fragmento de gelo, os íons H+ difundem-
se de maneira mais rápida para o gelo mais frio ocasionando uma resultante de cargas
negativas na região mais quente (MACGORMAN, 1998).
h) Camada Elétrica Dupla: Esta hipótese assume a existência de uma dupla camada elétrica
entre as interfaces da água e o ar, gelo e ar ou gelo e água. Sugere, portanto que bolhas de
CO2 podem estar na em fase líquida ou sólida e quando estas emergem para a superfície e se
quebram, gotículas escapam e carregam as cargas que estão nas camadas mais próximas da
borda, ocasionando uma carga resultante maior com sinal oposto na parte inferior da camada.
Pode ocorrer também que se uma partícula transfere mais carga na parte superior do que na
parte inferior da outra partícula, pode ocorrer uma transferência de carga resultante para a
camada de fronteira (MACGORMAN, 1998).
i) Camada Quase – Líquida: Alguns pesquisadores tais como Faraday (1860) e recentemente
Baker e Dash (1994) sugeriram que a interface entre o gelo e ar é uma camada quase-líquida,
mas que possui características típicas de gelo. Sugere que as partículas possuem uma camada
elétrica dupla, mas com diferentes espessuras que pressupõem camadas quase-líquidas
diferentes. Esta diferença de espessura da camada quase-líquida pode ter origem na forma
como ocorreu o crescimento por deposição das partículas, assim após ocorrem à colisão e
separação entre as partículas, aquelas com camadas mais espessas perdem massa para as
partículas que possuem um crescimento mais lento, resultando cargas positivas para as
partículas com crescimento mais rápido (MACGORMAN, 1998).
1.2 OS PROCESSOS DE UMA DESCARGA ATMOSFÉRICA
Um relâmpago nuvem-solo inicia-se através da quebra de rigidez dielétrica do ar
dentro da nuvem. A presença da condutividade e de cargas na superfície da Terra infere um
campo elétrico de tempo bom, que em geral está orientado em direção ao solo e é
conseqüência da existência de cargas na superfície da Terra e da condutividade terrestre.
Contudo assumindo um aumento exponencial da condutividade elétrica da superfície com a
altitude, o campo elétrico decresce na mesma proporção que diminui o número de elétrons
livres, (no entanto, próximo ao solo o campo elétrico apresenta variações atribuídas aos
movimentos das cargas além das variações diurnas e sazonais), assim uma descarga
16
atmosférica é desencadeada quando o campo elétrico supera a capacidade isolante do ar cujo
campo elétrico do ar é de 3MV/m enquanto no interior da nuvem o campo elétrico está entre
100-400 kV/m (MASON, 2003). O processo de quebra de rigidez tem uma duração média de
100 milissegundos. Este processo estabelece as condições para que as cargas sejam levadas
rumo ao solo pelo Líder Escalonado ou Stepped Leader (Figura 1.5).
Sobre a influência do campo elétrico estabelecido entre a nuvem e o solo (assumindo
um direcionamento para o solo do campo elétrico e uma descarga negativa), as cargas
negativas então movem-se aleatoriamente em etapas parando repetidas vezes no ar e em
intervalos de alguns metros (~50m) em direção ao solo. Ao longo do caminho, algumas
cargas seguem outros rumos devido à influência de cargas na atmosfera ao redor do canal,
formando ramificações. As cargas no canal movem-se rumo ao solo com velocidade média de
cerca de 100 km/s produzindo uma fraca luminosidade em uma região com diâmetro entre 1 e
10 metros ao longo do qual a carga é depositada (THOMSON, et.al., 1984; UMAN, 1987).
Quando o canal do líder escalonado aproxima-se do solo, a carga elétrica contida no
canal produz um campo elétrico intenso entre a extremidade do líder e o solo, fazendo com
que ocorra uma descarga positiva ascendente denominada Descarga Conectante ou Upward
Leader (Figura 1.5.b). Quando um dos líderes conectantes encontra o líder escalonado, o
canal do relâmpago está formado, surge o chamado “Attachment” e ocorre a Descarga de
Retorno ou Return Stroke (Figura 1.5.c). Frequentemente os processos de lideres e descargas
repetem-se no mesmo canal ionizado em diferentes intervalos de tempo por que encontram
um canal que se mantêm ionizado e pronto para descargas subseqüentes por algum tempo. O
Líder Subseqüente ou Dart Leader move-se pelo mesmo canal como o líder escalonado
original que em geral não possui ramificações. Devido à resistência elétrica do canal agora ser
baixa, o líder contínuo descende rapidamente e quando se aproxima do solo, normalmente
ocorre uma descarga de retorno para a nuvem.
Ocasionalmente várias descargas no sentido do conjunto de correntes de retorno
ocorrem até que o centro de cargas seja completamente neutralizado, ou seja, até que ocorra o
fechamento do canal, todos estes processos de um mesmo evento caracterizados pela
multiplicidade de descargas subseqüentes pelo canal ionizado são comumente definidos como
flash (MACGORMAN, 1998).
17
Figura. 1.5 – Uma descarga atmosférica do tipo nuven-solo (NS), admitindo uma estrutura bipolar da nuven de tempestade. Em (a) o líder escalonado (saltando e parando em intervalos), na seqüência (b) ocorre uma descarga conectante devido à proximidade do líder escalonado em seguida ocorre à descarga propriamente dita chamada de descarga de retorno. (c) repetidas descargas subseqüentes de retorno são conhecidas como Flash.
Durante este processo o campo elétrico e magnético produzidos pelas descargas
atmosféricas sofre variações no tempo e no espaço, desta forma emítem um ruído
característico conhecido como Radio Atmospherics – Sferics, estes possuem maior parte da
energia irradiada no espectro do Very Low Frequency (VLF) e Extremely Low Frequency
(ELF) (AL´PERT, et. al.,1970 ), cujas ondas eletromagnéticas propagam-se a longas
distâncias dentro do guia de onda formado pela baixa Ionosfera e a superfície da Terra
(BARR et. al, 2000; BUDDEN, 1951; LEE, 1989).
1.3 RADIO ATMOSPHERICS
Desde 1920 até 1960 a parte da atmosfera com grande concentração de elétrons livres
e íons, conhecida como ionosfera, possibilitou a base para as explorações por ondas de rádio.
Mais de 20 anos depois das formulações das equações de Maxwell em 1860, Hertz
comprovou a propagação de ondas eletromagnéticas (ORSINI, 1950).
Os sferics são pulsos de curta duração (entre 1 – 10 ms) com campos elétricos verticais
provenientes de descargas atmosféricas. O significado espectral da forma de onda pode ser
+ + + + + + +
+ + + + + + +
+ + + + + + +
- - - - - - -
- - - - - - -
- - - - - - -
+ + + + +
--- --
--
--
-
+ + +
+ +
+ +
+ +
+ +
+ +
- -(a) (b) (c)
18
usado para estudos a respeito da propagação de ondas de rádio pelo guia de onda formado
pela superfície da Terra e a baixa ionosfera (TAYLOR, 1960).
O pulso eletromagnético gerado por uma descarga atmosférica está situado numa
banda larga do espectro eletromagnético, contudo, a maior parte da energia irradiada
encontra-se no espectro do Very Low Frequency (VLF) e Extremely Low Frequency (ELF),
sendo que estas energias se propagam livremente pelo guia de onda formado pela baixa
ionosfera e a superfície terrestre (CUMMER, 1997).
1.4 OBJETIVOS
Esta dissertação de mestrado tem por objetivo principal avaliar o erro de localização
da rede ZEUS (Long Range Lightning Monitoring Network) a partir de análises teóricas e
experimentais.
As avaliações dos erros de localização serão abordadas da seguinte forma:
• Avaliação teórica da propagação das ondas de VLF: Cálculo teórico dos erros de
localização da rede ZEUS a partir da definição da propagação das ondas de VLF.
• Dependência dos sensores na acurácia da localização, ou seja, identificação dos erros
de localização em função dos receptores utilizados na solução e hora do dia.
• Cálculo do erro experimental a partir da comparação entre os dados observados entre
as redes RINDAT e ZEUS e comparação com os modelos teóricos.
19
CAPÍTULO 2
PROPAGAÇÃO DAS ONDAS ELETROMAGNÉTICAS NO GUIA DE ONDA (TERRA – IONOSFERA)
As ondas de rádio de ELF (Extremely Low Frequency: 3 Hz – 3 kHz) e VLF (Very
Low Frequency: 3 kHz – 30 kHz), despontaram grande interesse no monitoramento de
tempestades devido as suas propriedades de propagação. Vimos que estas ondas de propagam
a longas distâncias através de sucessivas reflexões no guia de onda formado pela superfície da
terra e a ionosfera. Este renovado interesse foi resultado de experiências realizadas durante a
Primeira e Segunda Guerra Mundial a partir da rádio comunicação e navegação.
Ondas no ELF /VLF conseguem se propagar a longas distâncias levando informações
a cerca do comportamento do campo elétrico das descargas elétricas e inferindo condições ao
conhecimento dos fenômenos a elas associadas. Estas ondas podem penetrar profundamente
abaixo da superfície da terra e interagir com a estrutura geológica da terra. Esta interação
induz campos secundários, com efeitos mensuráveis acima da superfície da terra, importante
também para outras áreas de pesquisa como, por exemplo, a prospecção de petróleo e de
águas subterrâneas (KAROUS, et, al., 1983). A compreensão apropriada da física da geração
e da propagação de ELF/VLF acena uma interação com materiais, aplicações nas
comunicações e no monitoramento de fenômenos naturais (BARR et. al., 2000).
De forma a entender os sistemas utilizados para a localização de descargas atmosféricas,
este capítulo discutirá as freqüências características, suas propriedades e comportamento, em
seguida os fenômenos associados à propagação das ondas em VLF e finalmente os sistemas e
métodos de monitoramento de descargas atmosféricas.
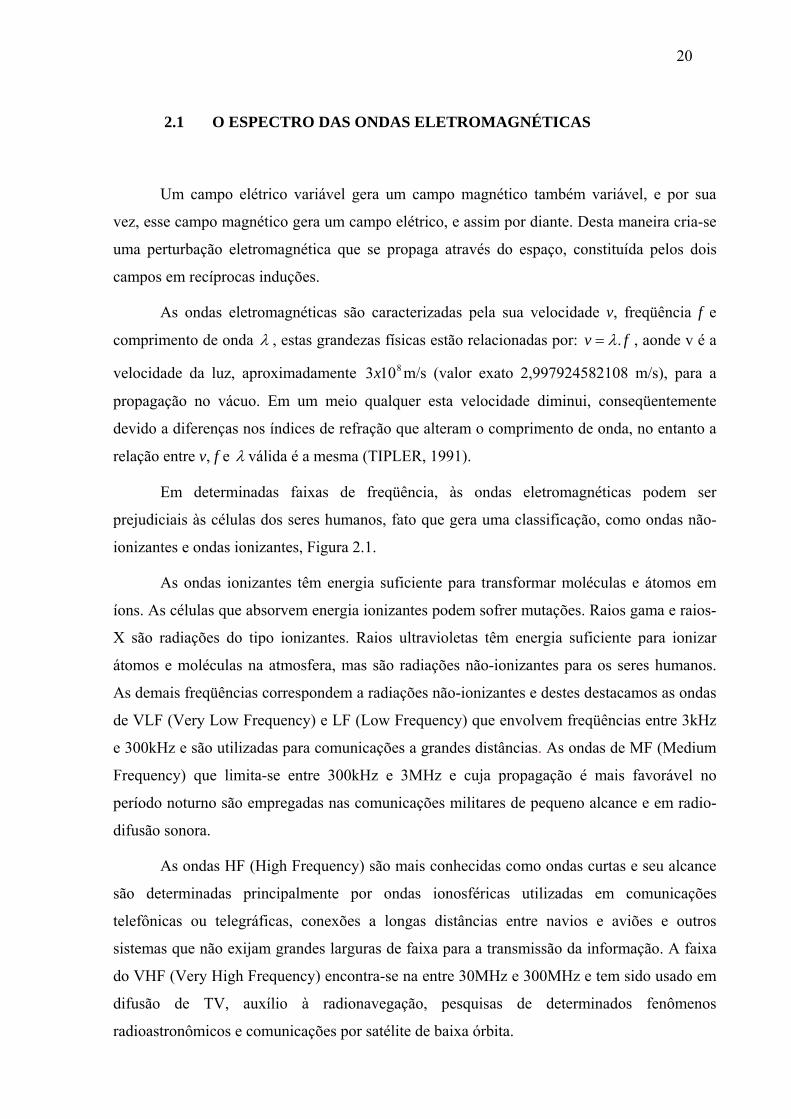
20
2.1 O ESPECTRO DAS ONDAS ELETROMAGNÉTICAS
Um campo elétrico variável gera um campo magnético também variável, e por sua
vez, esse campo magnético gera um campo elétrico, e assim por diante. Desta maneira cria-se
uma perturbação eletromagnética que se propaga através do espaço, constituída pelos dois
campos em recíprocas induções.
As ondas eletromagnéticas são caracterizadas pela sua velocidade v, freqüência f e
comprimento de onda λ , estas grandezas físicas estão relacionadas por: fv .λ= , aonde v é a
velocidade da luz, aproximadamente 8103x m/s (valor exato 2,997924582108 m/s), para a
propagação no vácuo. Em um meio qualquer esta velocidade diminui, conseqüentemente
devido a diferenças nos índices de refração que alteram o comprimento de onda, no entanto a
relação entre v, f e λ válida é a mesma (TIPLER, 1991).
Em determinadas faixas de freqüência, às ondas eletromagnéticas podem ser
prejudiciais às células dos seres humanos, fato que gera uma classificação, como ondas não-
ionizantes e ondas ionizantes, Figura 2.1.
As ondas ionizantes têm energia suficiente para transformar moléculas e átomos em
íons. As células que absorvem energia ionizantes podem sofrer mutações. Raios gama e raios-
X são radiações do tipo ionizantes. Raios ultravioletas têm energia suficiente para ionizar
átomos e moléculas na atmosfera, mas são radiações não-ionizantes para os seres humanos.
As demais freqüências correspondem a radiações não-ionizantes e destes destacamos as ondas
de VLF (Very Low Frequency) e LF (Low Frequency) que envolvem freqüências entre 3kHz
e 300kHz e são utilizadas para comunicações a grandes distâncias. As ondas de MF (Medium
Frequency) que limita-se entre 300kHz e 3MHz e cuja propagação é mais favorável no
período noturno são empregadas nas comunicações militares de pequeno alcance e em radio-
difusão sonora.
As ondas HF (High Frequency) são mais conhecidas como ondas curtas e seu alcance
são determinadas principalmente por ondas ionosféricas utilizadas em comunicações
telefônicas ou telegráficas, conexões a longas distâncias entre navios e aviões e outros
sistemas que não exijam grandes larguras de faixa para a transmissão da informação. A faixa
do VHF (Very High Frequency) encontra-se na entre 30MHz e 300MHz e tem sido usado em
difusão de TV, auxílio à radionavegação, pesquisas de determinados fenômenos
radioastronômicos e comunicações por satélite de baixa órbita.
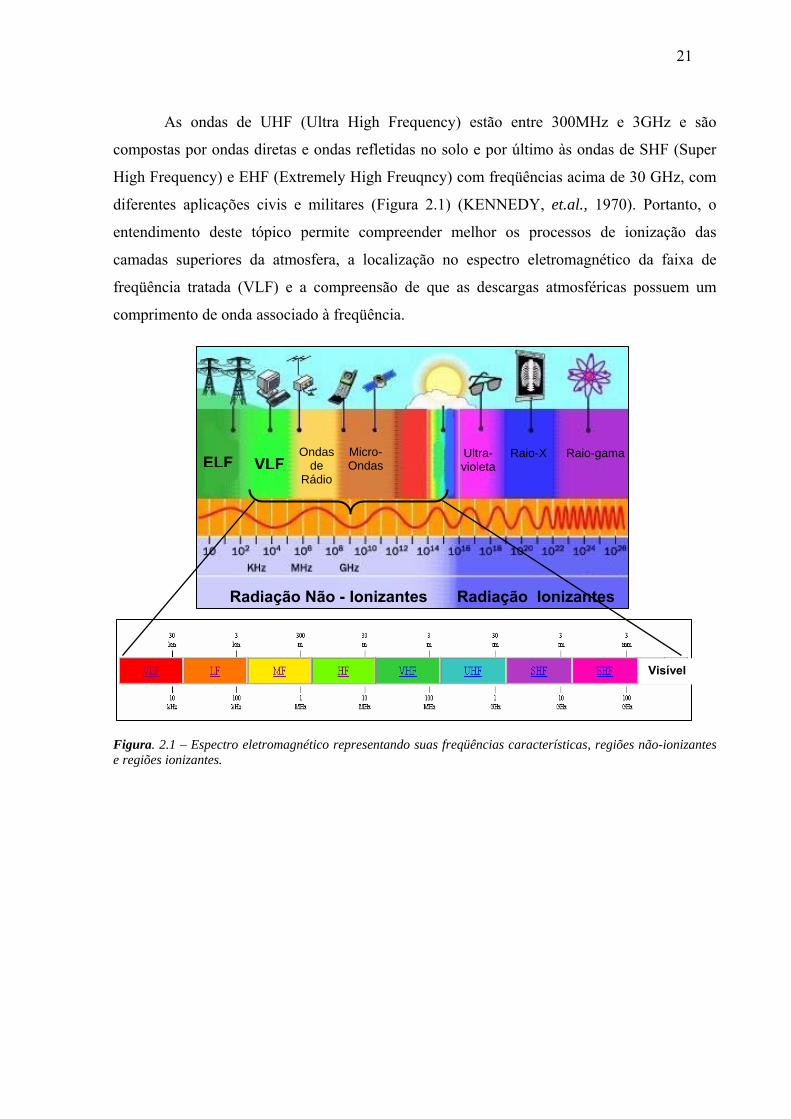
21
As ondas de UHF (Ultra High Frequency) estão entre 300MHz e 3GHz e são
compostas por ondas diretas e ondas refletidas no solo e por último às ondas de SHF (Super
High Frequency) e EHF (Extremely High Freuqncy) com freqüências acima de 30 GHz, com
diferentes aplicações civis e militares (Figura 2.1) (KENNEDY, et.al., 1970). Portanto, o
entendimento deste tópico permite compreender melhor os processos de ionização das
camadas superiores da atmosfera, a localização no espectro eletromagnético da faixa de
freqüência tratada (VLF) e a compreensão de que as descargas atmosféricas possuem um
comprimento de onda associado à freqüência.
Figura. 2.1 – Espectro eletromagnético representando suas freqüências características, regiões não-ionizantes e regiões ionizantes.
Visível
ELF VLFOndas
de Rádio
Micro-Ondas
Ultra-violeta
Raio-X Raio-gama
Radiação Não - Ionizantes Radiação Ionizantes
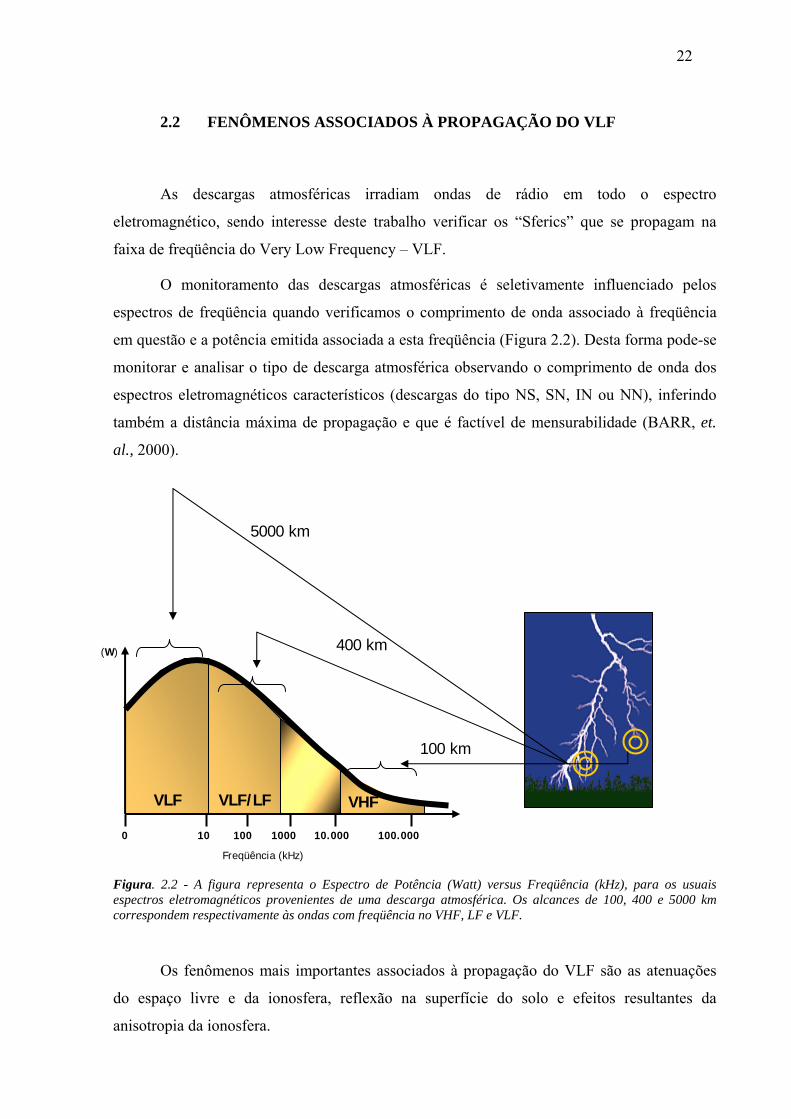
22
2.2 FENÔMENOS ASSOCIADOS À PROPAGAÇÃO DO VLF
As descargas atmosféricas irradiam ondas de rádio em todo o espectro
eletromagnético, sendo interesse deste trabalho verificar os “Sferics” que se propagam na
faixa de freqüência do Very Low Frequency – VLF.
O monitoramento das descargas atmosféricas é seletivamente influenciado pelos
espectros de freqüência quando verificamos o comprimento de onda associado à freqüência
em questão e a potência emitida associada a esta freqüência (Figura 2.2). Desta forma pode-se
monitorar e analisar o tipo de descarga atmosférica observando o comprimento de onda dos
espectros eletromagnéticos característicos (descargas do tipo NS, SN, IN ou NN), inferindo
também a distância máxima de propagação e que é factível de mensurabilidade (BARR, et.
al., 2000).
Figura. 2.2 - A figura representa o Espectro de Potência (Watt) versus Freqüência (kHz), para os usuais espectros eletromagnéticos provenientes de uma descarga atmosférica. Os alcances de 100, 400 e 5000 km correspondem respectivamente às ondas com freqüência no VHF, LF e VLF.
Os fenômenos mais importantes associados à propagação do VLF são as atenuações
do espaço livre e da ionosfera, reflexão na superfície do solo e efeitos resultantes da
anisotropia da ionosfera.
VLF/LF VLF VHF
10 0 100 1000 10.000 100.000
Freqüência (kHz)
(W)
5000 km
400 km
100 km
23
Na Figura 2.2 nota-se que o máximo do espectro de potência está entre 8 – 10 kHz e à
medida que a freqüência aumenta a potência diminui. É possível inferir uma distância de
propagação a partir do comprimento de onda característico de cada freqüência. Da relação λ =
υ/f, observa-se que à medida que a freqüência diminui o comprimento de onda aumenta, esta
relação inversamente proporcional estabelece comprimentos de ondas entre 10-100 km para a
freqüência no VLF e comprimentos de ondas entre 1-10 m para a freqüência no VHF
(KENNEDY, 1970).
A situação mais simples de propagação de uma onda seria por visada direta
(característico para as altas freqüências). Embora seja possível apenas num ambiente
completamente desobstruído. A propagação da onda direta no espaço livre pode ser
considerada principalmente em freqüências elevadas, como em VHF além de UHF e SHF. O
alcance da propagação direta fica limitado quando há necessidade de serem consideradas
alterações introduzidas pela presença da própria atmosfera e a topografia. Em freqüências
muito altas o sinal de rádio reflete no solo e passa a ser uma onda de céu (Figura 2.3).
Ondas de Superfície
Ondas de Terrestres Ondas Diretas
Ondas de Ionosféricas Ondas de Céu
Ondas Troposféricas Ondas Refletidas
Figura. 2.3 – Tipos de ondas de rádio que representam meio pela qual ocorrem as devidas propagações eletromagnéticas.
Budden (1951), Wait (1961) e Lee (1986) mostraram que no espectro eletromagnético
do VLF o sinal emitido por uma descarga atmosférica é refletido pela camada D da ionosfera
e que, apresenta um comportamento anisotrópico como toda a ionosfera, sofrendo alterações
diárias, influência das estações do ano e dos ciclos solares.
Em propagações que envolvem grandes distâncias as ondas de céu são características
das freqüências muito baixas, embora apresentem propagações de ondas de superfície. A
propagação em VLF a longas distâncias, muitas vezes apresenta-se como uma combinação
entre os dois tipos de ondas (de superfície e de céu), podendo ocorrer interferência pela
combinação destrutiva das ondas (ORSINI, 1950).
24
2.2.1 ONDAS DE SUPERFÍCIE
Este tipo de onda representa a parcela do campo irradiado por uma descarga
atmosférica, que se propaga ao longo do contorno da Terra. Admite-se que a superfície induza
uma corrente no solo devido à presença de um campo elétrico local, que induzem novos
campos, numa sucessão que tende a se difundir em toda região. Como o terreno possui
condutividades finitas, as correntes induzidas implicam em efeitos que tendem a diminuir as
amplitudes das componentes do campo magnético (NORTON, 1936).
Essa tendência de seguir a curvatura da Terra (Figura 2.4) é que torna possível a
transmissão de ondas de superfície a distâncias de até 400 km aproximadamente, antes de
ocorrer interferência com outros tipos de ondas.
Grande parte das deformações do solo é pequena quando comparados com os
comprimentos de onda do VLF, mas para isto supõe-se uma propagação sobre uma superfície
lisa. Os campos eletromagnéticos de freqüências mais altas curvam-se apenas ligeiramente,
não o bastante para proporcionar uma transmissão a longas distâncias.
A onda de superfície não explica a possibilidade de propagação à longa distância,
confirmada pelo engenheiro italiano Guglielmo Marconi (1874-1937) em 1901 (telegrafia
sem fios através do oceano Atlântico). Cálculos efetuados anteriormente demonstravam a
insuficiência da propagação por difração numa Terra esférica para cobrir distâncias tão
grandes.
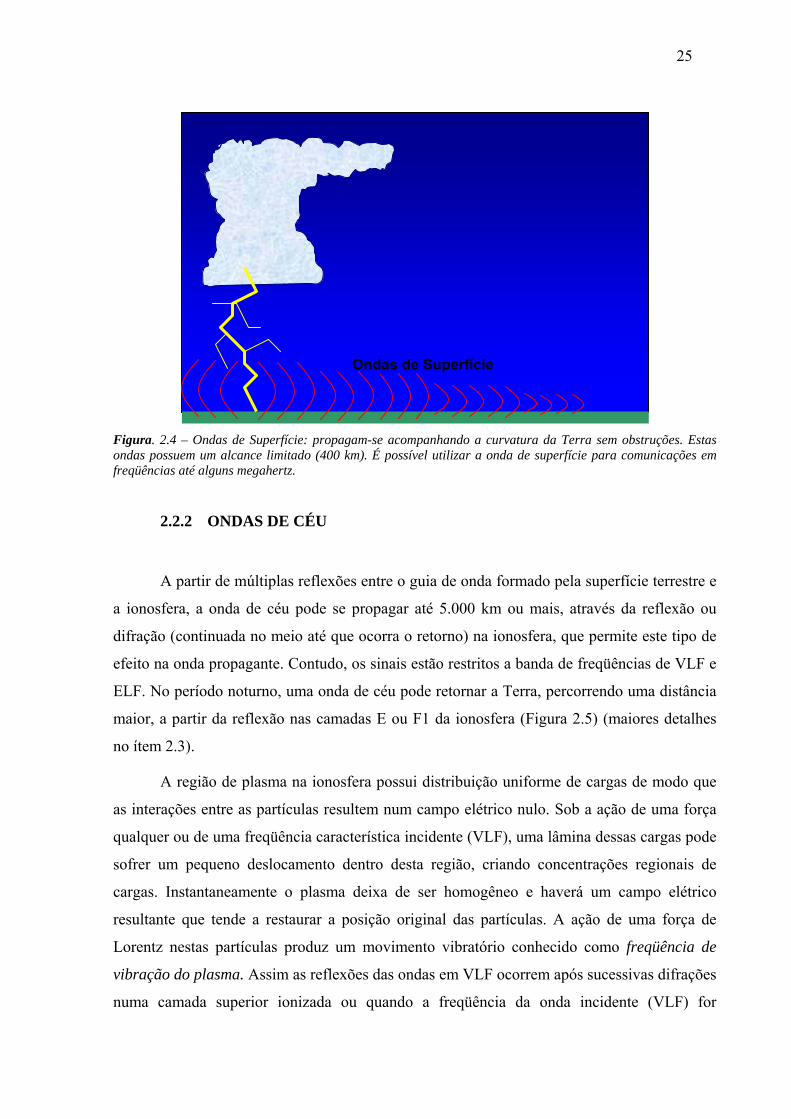
25
Figura. 2.4 – Ondas de Superfície: propagam-se acompanhando a curvatura da Terra sem obstruções. Estas ondas possuem um alcance limitado (400 km). É possível utilizar a onda de superfície para comunicações em freqüências até alguns megahertz.
2.2.2 ONDAS DE CÉU
A partir de múltiplas reflexões entre o guia de onda formado pela superfície terrestre e
a ionosfera, a onda de céu pode se propagar até 5.000 km ou mais, através da reflexão ou
difração (continuada no meio até que ocorra o retorno) na ionosfera, que permite este tipo de
efeito na onda propagante. Contudo, os sinais estão restritos a banda de freqüências de VLF e
ELF. No período noturno, uma onda de céu pode retornar a Terra, percorrendo uma distância
maior, a partir da reflexão nas camadas E ou F1 da ionosfera (Figura 2.5) (maiores detalhes
no ítem 2.3).
A região de plasma na ionosfera possui distribuição uniforme de cargas de modo que
as interações entre as partículas resultem num campo elétrico nulo. Sob a ação de uma força
qualquer ou de uma freqüência característica incidente (VLF), uma lâmina dessas cargas pode
sofrer um pequeno deslocamento dentro desta região, criando concentrações regionais de
cargas. Instantaneamente o plasma deixa de ser homogêneo e haverá um campo elétrico
resultante que tende a restaurar a posição original das partículas. A ação de uma força de
Lorentz nestas partículas produz um movimento vibratório conhecido como freqüência de
vibração do plasma. Assim as reflexões das ondas em VLF ocorrem após sucessivas difrações
numa camada superior ionizada ou quando a freqüência da onda incidente (VLF) for
Ondas de Superfície
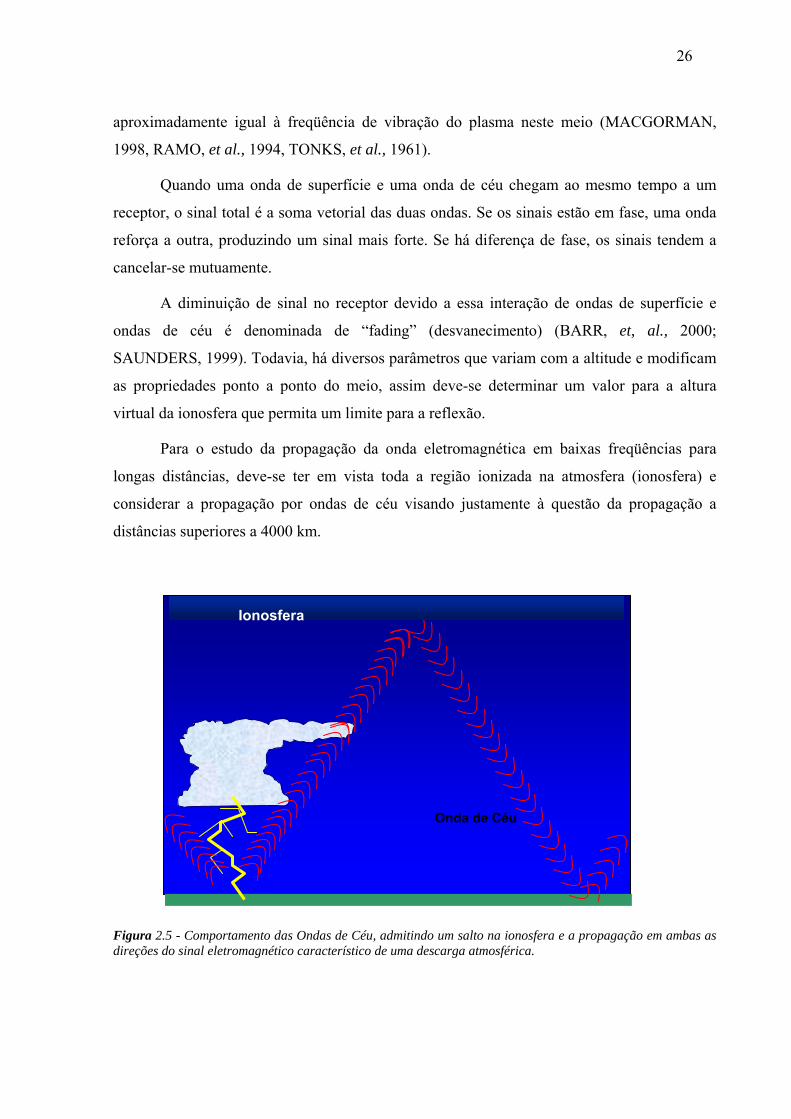
26
aproximadamente igual à freqüência de vibração do plasma neste meio (MACGORMAN,
1998, RAMO, et al., 1994, TONKS, et al., 1961).
Quando uma onda de superfície e uma onda de céu chegam ao mesmo tempo a um
receptor, o sinal total é a soma vetorial das duas ondas. Se os sinais estão em fase, uma onda
reforça a outra, produzindo um sinal mais forte. Se há diferença de fase, os sinais tendem a
cancelar-se mutuamente.
A diminuição de sinal no receptor devido a essa interação de ondas de superfície e
ondas de céu é denominada de “fading” (desvanecimento) (BARR, et, al., 2000;
SAUNDERS, 1999). Todavia, há diversos parâmetros que variam com a altitude e modificam
as propriedades ponto a ponto do meio, assim deve-se determinar um valor para a altura
virtual da ionosfera que permita um limite para a reflexão.
Para o estudo da propagação da onda eletromagnética em baixas freqüências para
longas distâncias, deve-se ter em vista toda a região ionizada na atmosfera (ionosfera) e
considerar a propagação por ondas de céu visando justamente à questão da propagação a
distâncias superiores a 4000 km.
Figura 2.5 - Comportamento das Ondas de Céu, admitindo um salto na ionosfera e a propagação em ambas as direções do sinal eletromagnético característico de uma descarga atmosférica.
Ionosfera
Onda de Céu
27
2.3 A IONOSFERA E A PROPAGAÇÃO A LONGAS DISTÂNCIAS
Quando tratamos das ondas de céu é necessária à existência de uma região refletora na
atmosfera superior, foi então que surgiu uma proposta simultaneamente (independentemente),
dada por Arthur Edwin Kennelly (1861-1939) e Oliver Heaviside, da existência de uma região
eletrizada que poderia dar conta dos fenômenos de propagação. Esta camada conhecida
inicialmente por camada de Kennelly-Heaviside, hoje designada por ionosfera, foi na época
um tema muito discutido pela comunidade científica (ORSINI, 1950; RUSSEL, et al., 1995).
Esta região foi comprovada experimentalmente em 1925 por Edward Victor Appleton
(1892-1965), que descobriu a existência das camadas refletoras no seu interior. O
conhecimento das características da ionosfera é em grande parte baseado nos seus efeitos
sobre ondas eletromagnéticas.
Como o Sol é a fonte natural de energia de maior influência na atmosfera, a ionização
das camadas atmosféricas está intimamente relacionada com os efeitos da atividade solar
sobre o planeta e, portanto, as variações da ionosfera dependem da hora do dia, da estação do
ano, das coordenadas geográficas e do ciclo de atividade solar (AARONS, 1982; ORSINI,
1950).
Para fins de análise do comportamento da propagação das ondas eletromagnéticas, as
camadas ionosféricas são identificadas como Camada D, E e Camada F (Figura 2.6).
A existência destas camadas ionizadas na atmosfera superior pode ser explicada em
termos qualitativamente simples. Para altas altitudes, a radiação solar que causa a ionização
das moléculas gasosas é muito intensa, tendo poucas moléculas disponíveis, a concentração
de elétrons livres é pequena. Em altitudes mais baixas há uma concentração de moléculas
muito maior, por este motivo ocorre um máximo da densidade de elétrons. Em altitudes
inferiores a concentração de moléculas é ainda maior, mas a maior parte da radiação ionizante
já foi absorvida, ocorrendo à concentração de elétrons livres. Portanto, admitem-se camadas
espessas de gases ionizados, com uma elevada densidade de elétrons em função da altura
(MACGORMAN, 1998).
Como a atmosfera superior é composta por vários gases distintos, embora
predominantemente nitrogênio (N2) com 78% e oxigênio (O2) com 21%, e como esses gases
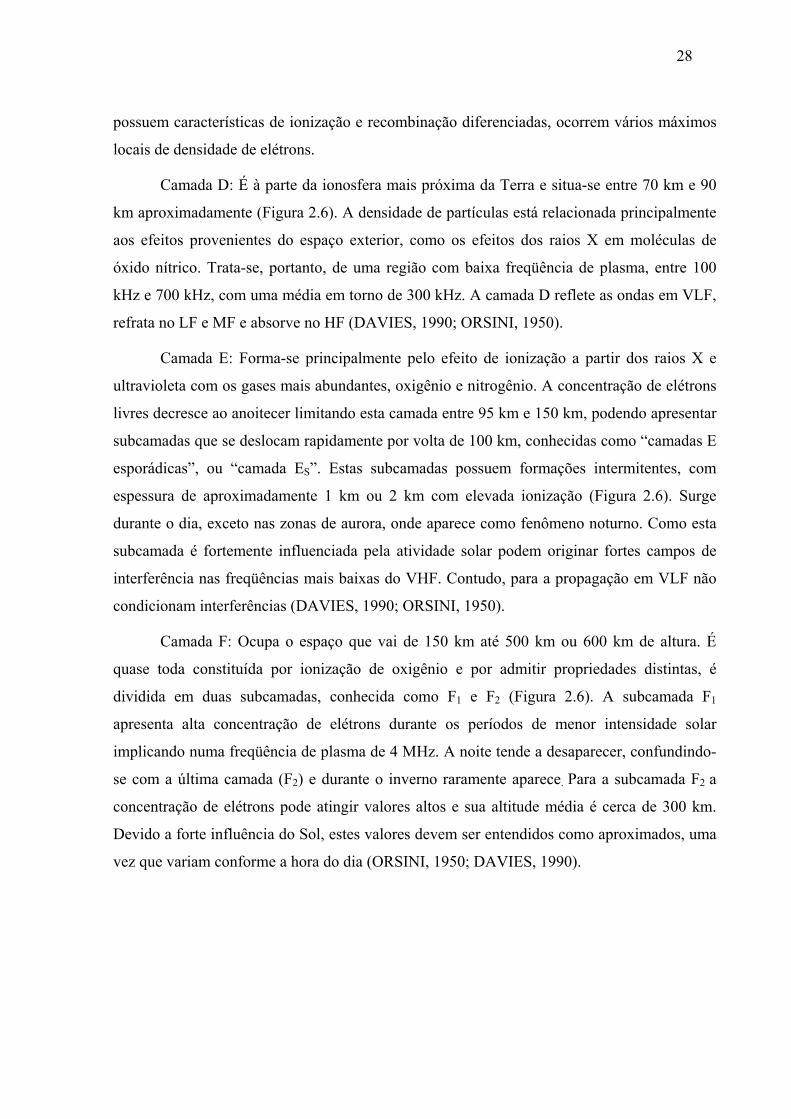
28
possuem características de ionização e recombinação diferenciadas, ocorrem vários máximos
locais de densidade de elétrons.
Camada D: É à parte da ionosfera mais próxima da Terra e situa-se entre 70 km e 90
km aproximadamente (Figura 2.6). A densidade de partículas está relacionada principalmente
aos efeitos provenientes do espaço exterior, como os efeitos dos raios X em moléculas de
óxido nítrico. Trata-se, portanto, de uma região com baixa freqüência de plasma, entre 100
kHz e 700 kHz, com uma média em torno de 300 kHz. A camada D reflete as ondas em VLF,
refrata no LF e MF e absorve no HF (DAVIES, 1990; ORSINI, 1950).
Camada E: Forma-se principalmente pelo efeito de ionização a partir dos raios X e
ultravioleta com os gases mais abundantes, oxigênio e nitrogênio. A concentração de elétrons
livres decresce ao anoitecer limitando esta camada entre 95 km e 150 km, podendo apresentar
subcamadas que se deslocam rapidamente por volta de 100 km, conhecidas como “camadas E
esporádicas”, ou “camada ES”. Estas subcamadas possuem formações intermitentes, com
espessura de aproximadamente 1 km ou 2 km com elevada ionização (Figura 2.6). Surge
durante o dia, exceto nas zonas de aurora, onde aparece como fenômeno noturno. Como esta
subcamada é fortemente influenciada pela atividade solar podem originar fortes campos de
interferência nas freqüências mais baixas do VHF. Contudo, para a propagação em VLF não
condicionam interferências (DAVIES, 1990; ORSINI, 1950).
Camada F: Ocupa o espaço que vai de 150 km até 500 km ou 600 km de altura. É
quase toda constituída por ionização de oxigênio e por admitir propriedades distintas, é
dividida em duas subcamadas, conhecida como F1 e F2 (Figura 2.6). A subcamada F1
apresenta alta concentração de elétrons durante os períodos de menor intensidade solar
implicando numa freqüência de plasma de 4 MHz. A noite tende a desaparecer, confundindo-
se com a última camada (F2) e durante o inverno raramente aparece. Para a subcamada F2 a
concentração de elétrons pode atingir valores altos e sua altitude média é cerca de 300 km.
Devido a forte influência do Sol, estes valores devem ser entendidos como aproximados, uma
vez que variam conforme a hora do dia (ORSINI, 1950; DAVIES, 1990).
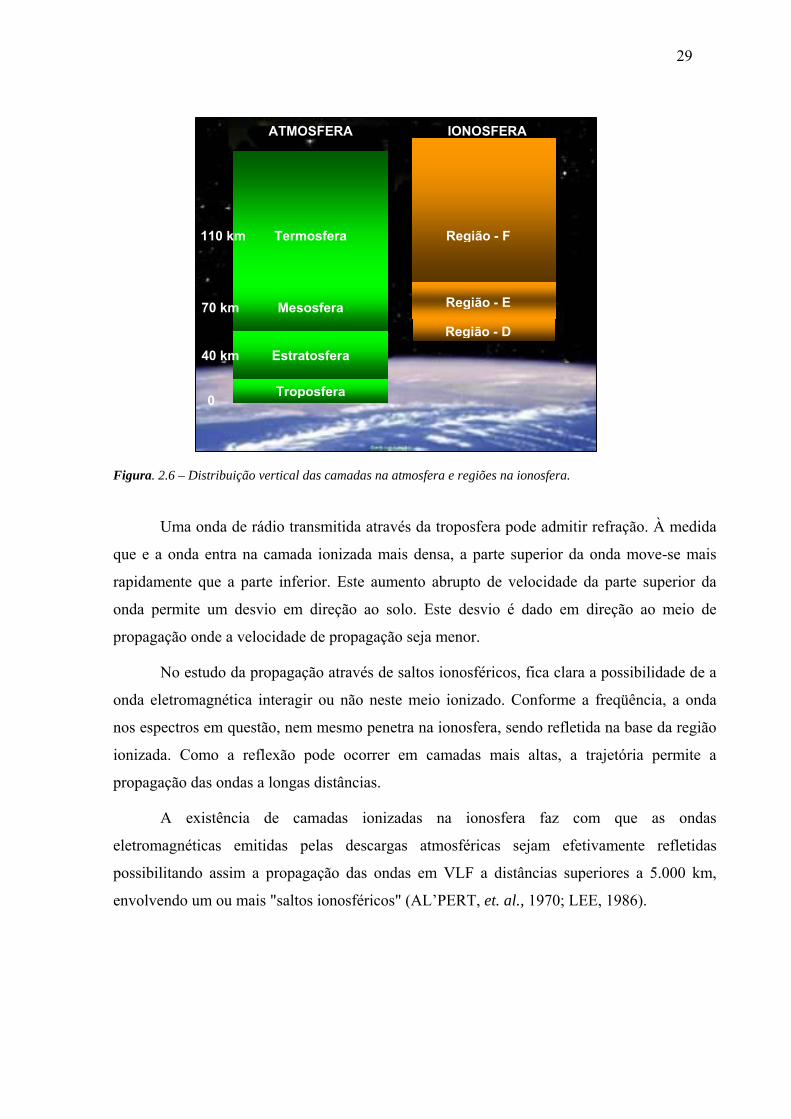
29
Figura. 2.6 – Distribuição vertical das camadas na atmosfera e regiões na ionosfera.
Uma onda de rádio transmitida através da troposfera pode admitir refração. À medida
que e a onda entra na camada ionizada mais densa, a parte superior da onda move-se mais
rapidamente que a parte inferior. Este aumento abrupto de velocidade da parte superior da
onda permite um desvio em direção ao solo. Este desvio é dado em direção ao meio de
propagação onde a velocidade de propagação seja menor.
No estudo da propagação através de saltos ionosféricos, fica clara a possibilidade de a
onda eletromagnética interagir ou não neste meio ionizado. Conforme a freqüência, a onda
nos espectros em questão, nem mesmo penetra na ionosfera, sendo refletida na base da região
ionizada. Como a reflexão pode ocorrer em camadas mais altas, a trajetória permite a
propagação das ondas a longas distâncias.
A existência de camadas ionizadas na ionosfera faz com que as ondas
eletromagnéticas emitidas pelas descargas atmosféricas sejam efetivamente refletidas
possibilitando assim a propagação das ondas em VLF a distâncias superiores a 5.000 km,
envolvendo um ou mais "saltos ionosféricos" (AL’PERT, et. al., 1970; LEE, 1986).
Troposfera
Estratosfera
Mesosfera
Termosfera
ATMOSFERA IONOSFERA
Região - D
Região - E
Região - F
0
40 km
70 km
110 km
30
2.4 OS SISTEMAS E OS MÉTODOS PARA MONITORAR DESCARGAS
ATMOSFÉRICAS
Os sistemas de monitoramento de descargas atmosféricas utilizam instrumentos no
espectro de rádio das ondas eletromagnéticas, espectro ótico e ondas acústicas. Estes
instrumentos foram desenvolvidos com propriedades específicas e distintas, condicionando
um monitoramento adequado para diferentes tipos de descargas atmosféricas.
As tecnologias utilizadas pelos sistemas de monitoramento de descargas atmosféricas
detêm limitações específicas a qual pretende-se nos próximos tópicos esclarecer. A seguir,
apresentam-se alguns instrumentos, métodos e sistemas que são utilizados atualmente para
monitorar e localizar descargas atmosféricas.
2.4.1 SISTEMAS ÓTICOS DE LOCALIZAÇÃO
Os instrumentos de sistemas óticos são representados pelo Operational Linescan
System (OLS), Optical Transient Detector (OTD) o Lightning Imaging Sensor (LIS) e o On-
orbit Recording of Transient Events (FORTE) os quais são capazes de detectar as variações
de luminosidade em nuvens durante o dia e a noite. Na seqüência são detalhadas as técnicas
utilizadas nestes sistemas óticos de localização de descargas atmosféricas.
Operational Linescan System – OLS: Lançado a bordo do Titan 2 em janeiro de 1973, Figura
2.8, e operando nos satélites do programa de defesa meteorológico norte-americano (DMPS –
Defense Meteorological Satellite Program), este instrumento consiste num instrumento usado
para monitorar a distribuição global de nuvens de tempestades durante a noite e a temperatura
do topo destas nuvens. Portanto o OLS permite a identificação de fontes de baixa emissão de
energia luminosa nas imagens (Figura. 2.7).
O mapeamento total do globo é realizado a cada 24 horas por dois radiômetros (Photo
Diode Detector– PDD) de varredura oscilatória e um tubo foto-multiplicador. O OLS está a
borde de um satélite que efetua medidas num período orbital de 101 minutos (~ 1,6 horas) e
suas atividades cessaram em 31 de janeiro de 1991 (ORVILLE. et, al,. 1986).
A distribuição de descargas atmosféricas observadas pelo OLS é mostrada pela Figura
2.7 e o período compreendido é de 12 meses que sobrepostos resultou em uma distribuição de
descargas atmosféricas sobre o globo.
31
Figura. 2.7 – Distribuição de descargas atmosféricas observadas pelo OLS referente ao período de 12 meses para 1989 (fonte: http://wwwghcc.msfc.nasa.gov/ols.html).
Figura. 2.8 – Operational Linescan System – OLS lançado a bordo do Titan 2.
Um dos radiômetros é utilizado para medir a temperatura do topo da nuvem observada
pelo canal do infravermelho termal (10.5 a 12.5 µm). O outro radiômetro era utilizado para
medir a luminosidade dos objetos na faixa do visível (0.4 a 0.1 µm) e estava acoplado a um
tubo foto-multiplicador que aumentava em 4 vezes a sensibilidade do sensor (ORVILLE, et
al,. 1986).
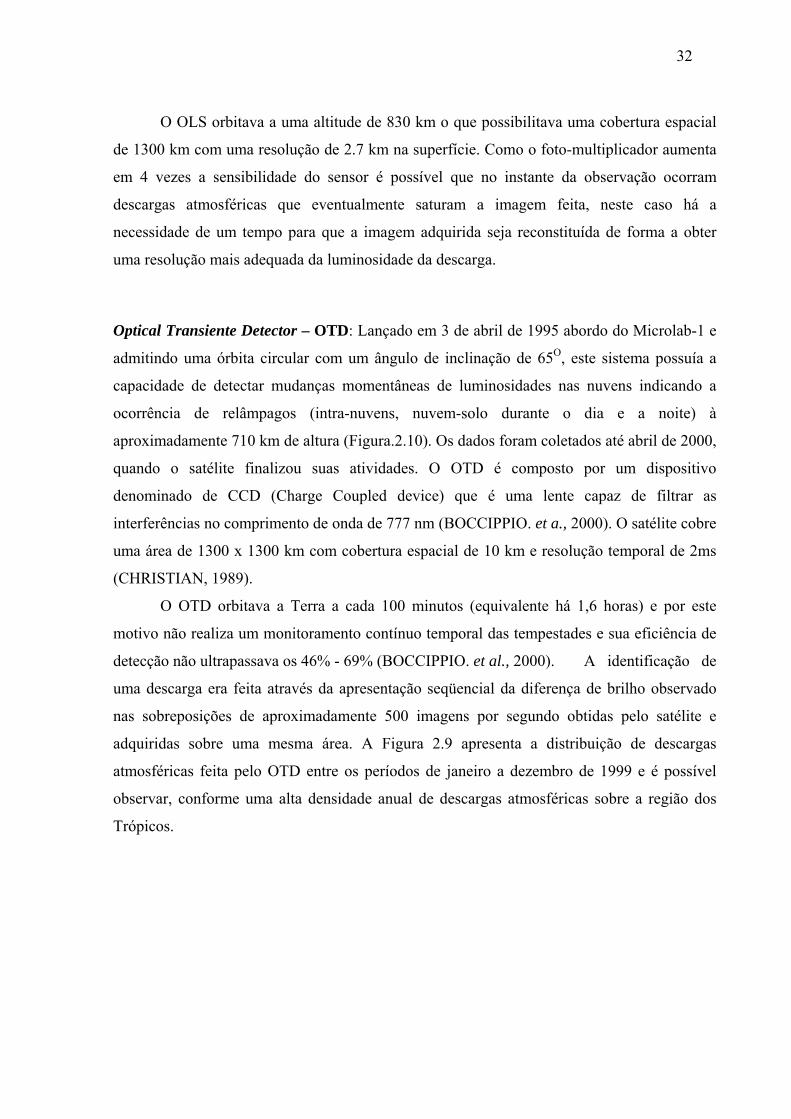
32
O OLS orbitava a uma altitude de 830 km o que possibilitava uma cobertura espacial
de 1300 km com uma resolução de 2.7 km na superfície. Como o foto-multiplicador aumenta
em 4 vezes a sensibilidade do sensor é possível que no instante da observação ocorram
descargas atmosféricas que eventualmente saturam a imagem feita, neste caso há a
necessidade de um tempo para que a imagem adquirida seja reconstituída de forma a obter
uma resolução mais adequada da luminosidade da descarga.
Optical Transiente Detector – OTD: Lançado em 3 de abril de 1995 abordo do Microlab-1 e
admitindo uma órbita circular com um ângulo de inclinação de 65O, este sistema possuía a
capacidade de detectar mudanças momentâneas de luminosidades nas nuvens indicando a
ocorrência de relâmpagos (intra-nuvens, nuvem-solo durante o dia e a noite) à
aproximadamente 710 km de altura (Figura.2.10). Os dados foram coletados até abril de 2000,
quando o satélite finalizou suas atividades. O OTD é composto por um dispositivo
denominado de CCD (Charge Coupled device) que é uma lente capaz de filtrar as
interferências no comprimento de onda de 777 nm (BOCCIPPIO. et a., 2000). O satélite cobre
uma área de 1300 x 1300 km com cobertura espacial de 10 km e resolução temporal de 2ms
(CHRISTIAN, 1989).
O OTD orbitava a Terra a cada 100 minutos (equivalente há 1,6 horas) e por este
motivo não realiza um monitoramento contínuo temporal das tempestades e sua eficiência de
detecção não ultrapassava os 46% - 69% (BOCCIPPIO. et al., 2000). A identificação de
uma descarga era feita através da apresentação seqüencial da diferença de brilho observado
nas sobreposições de aproximadamente 500 imagens por segundo obtidas pelo satélite e
adquiridas sobre uma mesma área. A Figura 2.9 apresenta a distribuição de descargas
atmosféricas feita pelo OTD entre os períodos de janeiro a dezembro de 1999 e é possível
observar, conforme uma alta densidade anual de descargas atmosféricas sobre a região dos
Trópicos.
33
Figura. 2.9 – Distribuição de descargas atmosféricas observadas pelo OTD referente ao período entre janeiro/dezembro de 1999(fonte: http://thunder.nssfc.nasa.gov/data/OTDsummaries/)
Figura. 2.10 –Optical Transient Detector – OTD a bordo do satélite microlab. Lightning Imaging Sensor – LIS: Abordo do satélite TRMM (Tropical Rainfall Measuring
Mission) lançado em 28 novembro de1997 do Tanegashima Space Center no Japão, o LIS é
um instrumento capaz de localizar e detectar descargas atmosféricas acima da superfície da
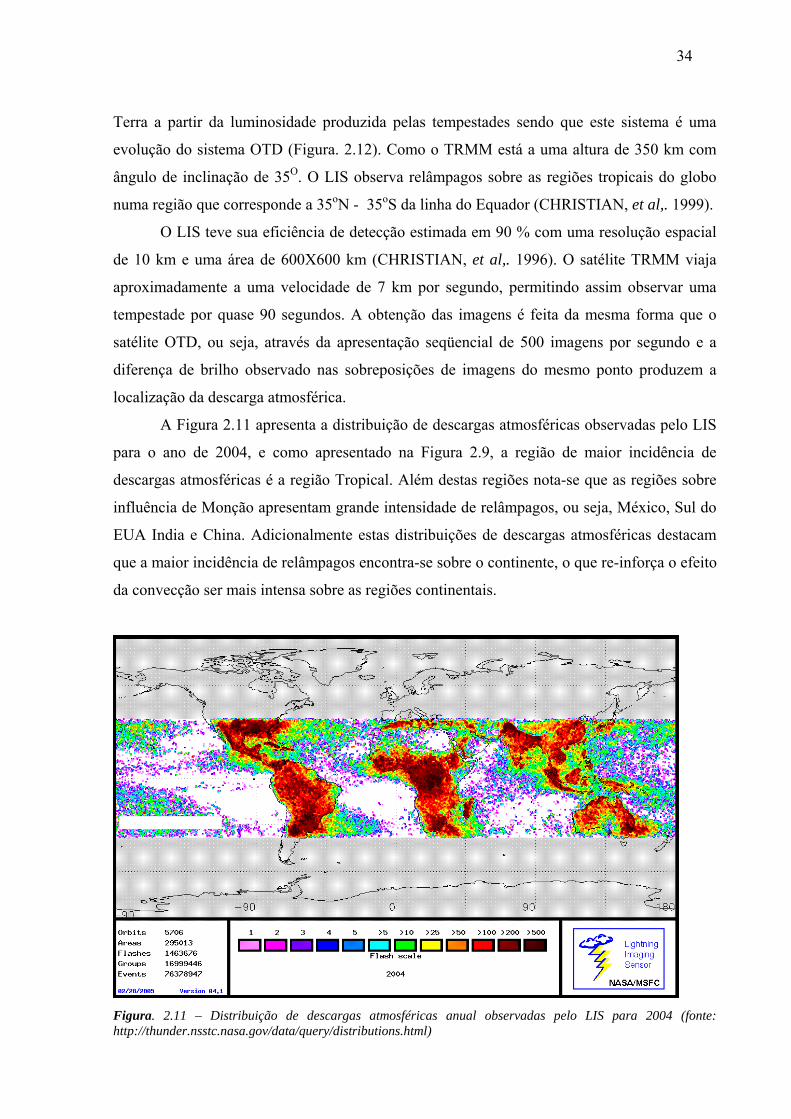
34
Terra a partir da luminosidade produzida pelas tempestades sendo que este sistema é uma
evolução do sistema OTD (Figura. 2.12). Como o TRMM está a uma altura de 350 km com
ângulo de inclinação de 35O. O LIS observa relâmpagos sobre as regiões tropicais do globo
numa região que corresponde a 35oN - 35oS da linha do Equador (CHRISTIAN, et al,. 1999).
O LIS teve sua eficiência de detecção estimada em 90 % com uma resolução espacial
de 10 km e uma área de 600X600 km (CHRISTIAN, et al,. 1996). O satélite TRMM viaja
aproximadamente a uma velocidade de 7 km por segundo, permitindo assim observar uma
tempestade por quase 90 segundos. A obtenção das imagens é feita da mesma forma que o
satélite OTD, ou seja, através da apresentação seqüencial de 500 imagens por segundo e a
diferença de brilho observado nas sobreposições de imagens do mesmo ponto produzem a
localização da descarga atmosférica.
A Figura 2.11 apresenta a distribuição de descargas atmosféricas observadas pelo LIS
para o ano de 2004, e como apresentado na Figura 2.9, a região de maior incidência de
descargas atmosféricas é a região Tropical. Além destas regiões nota-se que as regiões sobre
influência de Monção apresentam grande intensidade de relâmpagos, ou seja, México, Sul do
EUA India e China. Adicionalmente estas distribuições de descargas atmosféricas destacam
que a maior incidência de relâmpagos encontra-se sobre o continente, o que re-inforça o efeito
da convecção ser mais intensa sobre as regiões continentais.
Figura. 2.11 – Distribuição de descargas atmosféricas anual observadas pelo LIS para 2004 (fonte: http://thunder.nsstc.nasa.gov/data/query/distributions.html)
35
Figura. 2.12 –Lightning Imaging Sensor – LIS a bordo do satélite TRMM.
Fast On-orbit Recording of Transient Events – FORTE: Desenvolvido pela parceria
entre o Laboratório Nacional de Los Alamos e o Laboratório nacional Sadia no Novo México,
foi lançado em 29 de Agosto de 1997 da Base da Força Aérea de Vandenberg a bordo do
satélite Pegasus XL. O Forte cobre uma região de 1300 x 1300 km e consiste de três
instrumentos: um sistema de RF (rádio freqüência), um sistema ótico e um classificador de
eventos (Figura. 2.13). Sua inclinação de 70.0o e órbita de aproximadamente 799 km de
altitude, permite detectar e fazer correlação entre uma descarga elétrica no espectro ótico e as
emissões no espectro do VHF (SUSZCYNSKY, et al., 2000).
O sistema RF detém três receptores de RF no espectro de freqüência de 30-300 MHz
(VHF) que analisam a forma de onda das descargas atmosféricas.
O sistema ótico consiste em um sensor de varredura (Lightning Location System -
LLS) de 10 x10 km, com capacidade de detectar 500 amostras/segundo (e localizar
geograficamente um relâmpago) e um fotodetector (Optical Lightning System) e uma câmera
de CCD para fornecer a definição espacial e temporal das descargas atmosféricas.
O classificador de eventos, baseado na tecnologia de processamento de sinal digital,
fornece as características das formas de onda dos sinais eletromagnéticos provindo dos
relâmpagos (SUSZCYNSKY, et al., 2000).
36
Figura. 2.13 – Fast On-orbit Recording of Transient Events – FORTE a bordo do satellite PegasusXL.
2.4.2 SISTEMAS DE RÁDIO-LOCALIZAÇÃO
As descargas atmosféricas podem ser localizadas através de instrumentos que utilizam
o espectro de rádio através das medidas de Campo Elétrico e Magnético emitidos pelas
descargas atmosféricas.
O monitoramento de descargas atmosféricas sobre o Brasil é feito pela: RINDAT
(Rede Integrada Nacional de Detecção de Descargas Atmosféricas) que utiliza as tecnologias
IMPACT e LPATS e os métodos do TOA (Time of Arrival) e MDF (Magnetic Direction
Finding ), pela WWLLN (World Wide Lightning Location Network) que utiliza o método
TOGA (Time of Group Arrival), pela ZEUS (Long Range Lightning Monitoring Network)
que se utiliza do método do ATD (Arrival Time Difference), e futuramente o SIDDEM
(Sistema de Informações Integradas Baseado no Sistema de Detecção de Descargas
Atmosféricas) que utiliza os métodos do TOA/MDF além do sistema SAFIR. Finalmente
temos o LDAR (Lightning Detection and Ranging) que utiliza o método TOA que não esta
disponível no Brasil. Cada uma destas redes utiliza diferentes instrumentos e freqüências para
localizarem relâmpagos bem como técnicas ou métodos característicos, os quais serão
descritos a seguir.
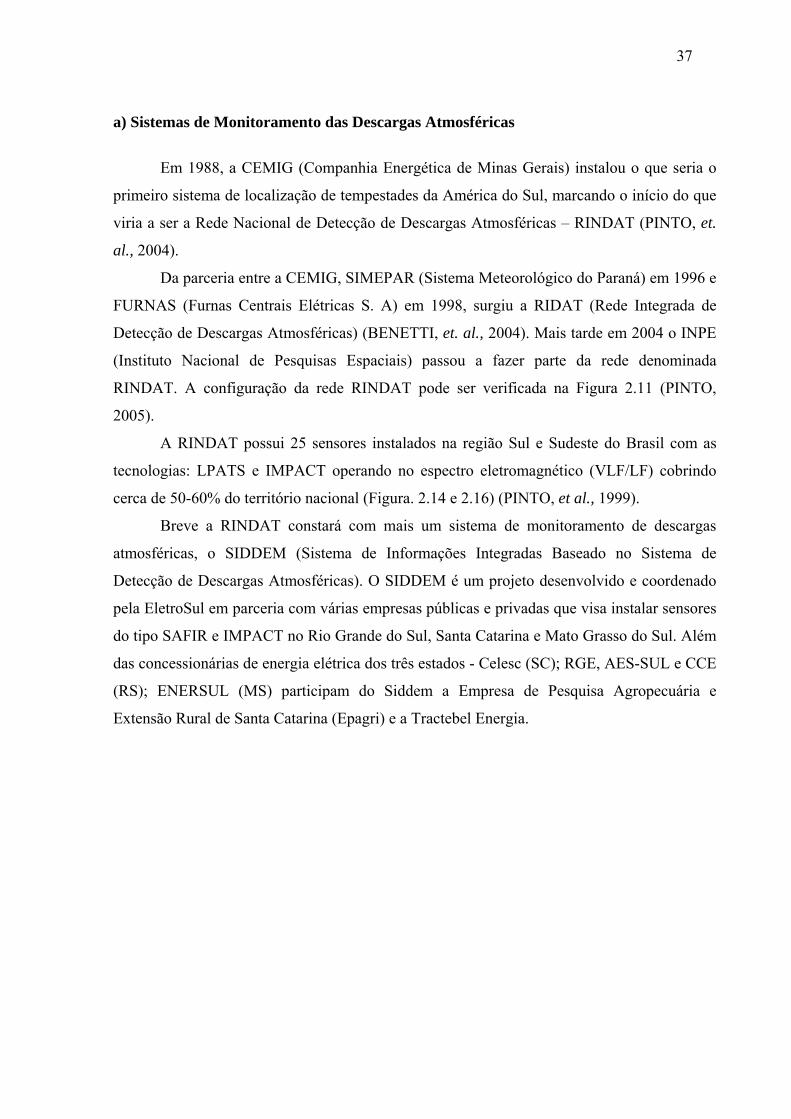
37
a) Sistemas de Monitoramento das Descargas Atmosféricas
Em 1988, a CEMIG (Companhia Energética de Minas Gerais) instalou o que seria o
primeiro sistema de localização de tempestades da América do Sul, marcando o início do que
viria a ser a Rede Nacional de Detecção de Descargas Atmosféricas – RINDAT (PINTO, et.
al., 2004).
Da parceria entre a CEMIG, SIMEPAR (Sistema Meteorológico do Paraná) em 1996 e
FURNAS (Furnas Centrais Elétricas S. A) em 1998, surgiu a RIDAT (Rede Integrada de
Detecção de Descargas Atmosféricas) (BENETTI, et. al., 2004). Mais tarde em 2004 o INPE
(Instituto Nacional de Pesquisas Espaciais) passou a fazer parte da rede denominada
RINDAT. A configuração da rede RINDAT pode ser verificada na Figura 2.11 (PINTO,
2005).
A RINDAT possui 25 sensores instalados na região Sul e Sudeste do Brasil com as
tecnologias: LPATS e IMPACT operando no espectro eletromagnético (VLF/LF) cobrindo
cerca de 50-60% do território nacional (Figura. 2.14 e 2.16) (PINTO, et al., 1999).
Breve a RINDAT constará com mais um sistema de monitoramento de descargas
atmosféricas, o SIDDEM (Sistema de Informações Integradas Baseado no Sistema de
Detecção de Descargas Atmosféricas). O SIDDEM é um projeto desenvolvido e coordenado
pela EletroSul em parceria com várias empresas públicas e privadas que visa instalar sensores
do tipo SAFIR e IMPACT no Rio Grande do Sul, Santa Catarina e Mato Grasso do Sul. Além
das concessionárias de energia elétrica dos três estados - Celesc (SC); RGE, AES-SUL e CCE
(RS); ENERSUL (MS) participam do Siddem a Empresa de Pesquisa Agropecuária e
Extensão Rural de Santa Catarina (Epagri) e a Tractebel Energia.
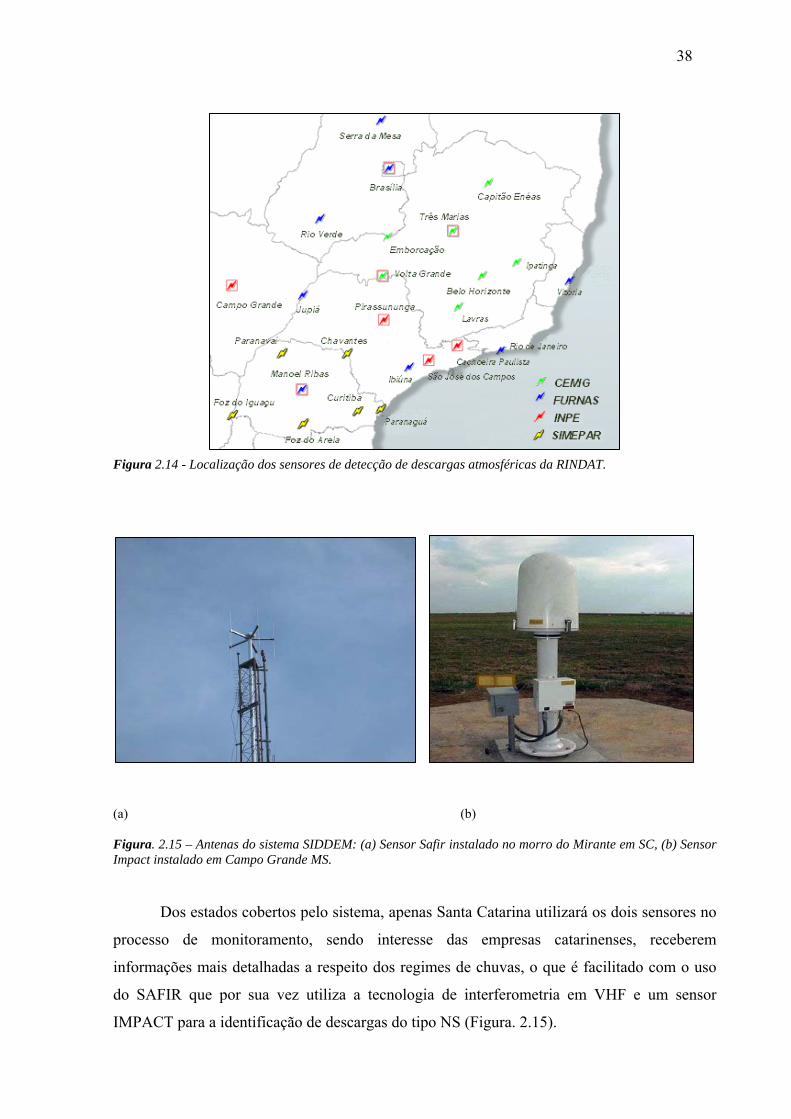
38
Figura 2.14 - Localização dos sensores de detecção de descargas atmosféricas da RINDAT.
(a) (b) Figura. 2.15 – Antenas do sistema SIDDEM: (a) Sensor Safir instalado no morro do Mirante em SC, (b) Sensor Impact instalado em Campo Grande MS.
Dos estados cobertos pelo sistema, apenas Santa Catarina utilizará os dois sensores no
processo de monitoramento, sendo interesse das empresas catarinenses, receberem
informações mais detalhadas a respeito dos regimes de chuvas, o que é facilitado com o uso
do SAFIR que por sua vez utiliza a tecnologia de interferometria em VHF e um sensor
IMPACT para a identificação de descargas do tipo NS (Figura. 2.15).
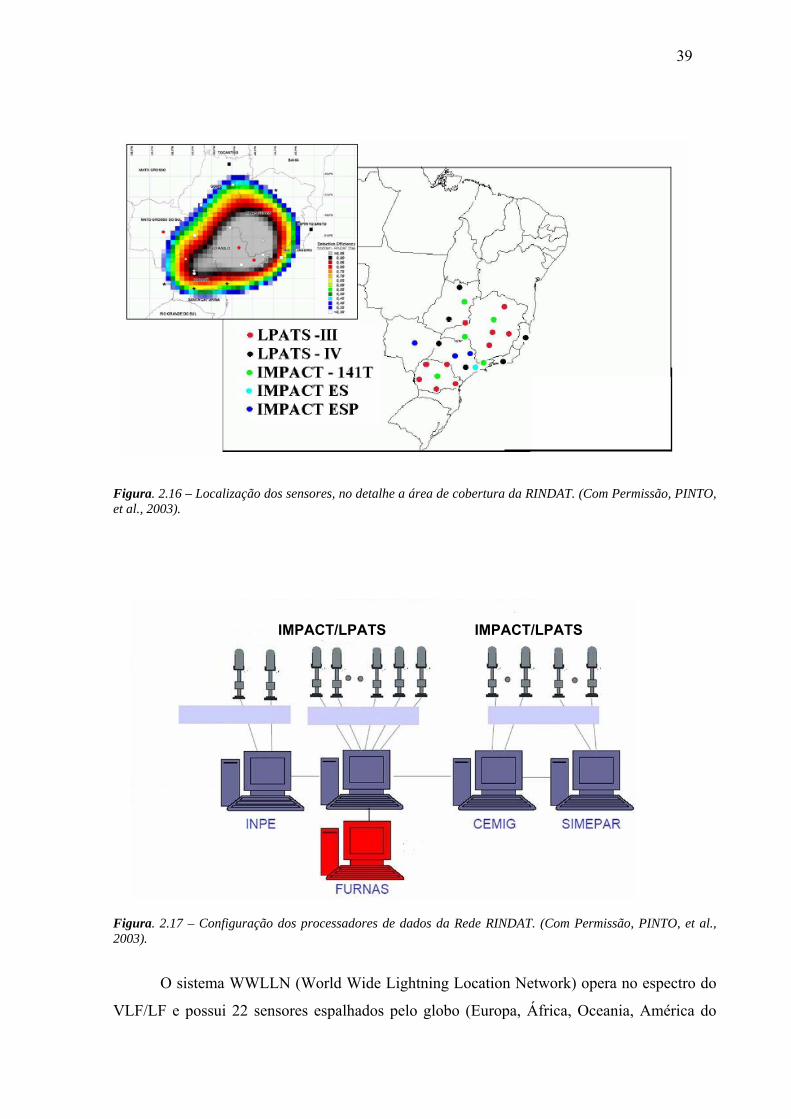
39
Figura. 2.16 – Localização dos sensores, no detalhe a área de cobertura da RINDAT. (Com Permissão, PINTO, et al., 2003).
Figura. 2.17 – Configuração dos processadores de dados da Rede RINDAT. (Com Permissão, PINTO, et al., 2003).
O sistema WWLLN (World Wide Lightning Location Network) opera no espectro do
VLF/LF e possui 22 sensores espalhados pelo globo (Europa, África, Oceania, América do
IMPACT/LPATS IMPACT/LPATS
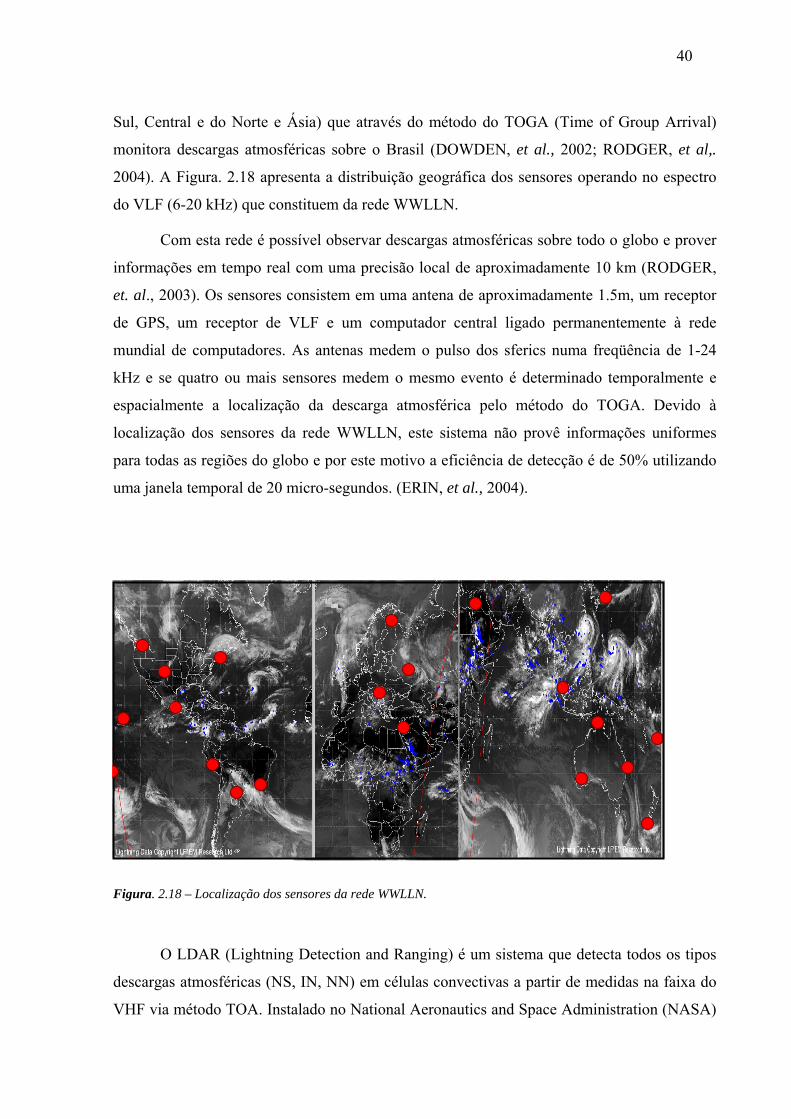
40
Sul, Central e do Norte e Ásia) que através do método do TOGA (Time of Group Arrival)
monitora descargas atmosféricas sobre o Brasil (DOWDEN, et al., 2002; RODGER, et al,.
2004). A Figura. 2.18 apresenta a distribuição geográfica dos sensores operando no espectro
do VLF (6-20 kHz) que constituem da rede WWLLN.
Com esta rede é possível observar descargas atmosféricas sobre todo o globo e prover
informações em tempo real com uma precisão local de aproximadamente 10 km (RODGER,
et. al., 2003). Os sensores consistem em uma antena de aproximadamente 1.5m, um receptor
de GPS, um receptor de VLF e um computador central ligado permanentemente à rede
mundial de computadores. As antenas medem o pulso dos sferics numa freqüência de 1-24
kHz e se quatro ou mais sensores medem o mesmo evento é determinado temporalmente e
espacialmente a localização da descarga atmosférica pelo método do TOGA. Devido à
localização dos sensores da rede WWLLN, este sistema não provê informações uniformes
para todas as regiões do globo e por este motivo a eficiência de detecção é de 50% utilizando
uma janela temporal de 20 micro-segundos. (ERIN, et al., 2004).
Figura. 2.18 – Localização dos sensores da rede WWLLN.
O LDAR (Lightning Detection and Ranging) é um sistema que detecta todos os tipos
descargas atmosféricas (NS, IN, NN) em células convectivas a partir de medidas na faixa do
VHF via método TOA. Instalado no National Aeronautics and Space Administration (NASA)
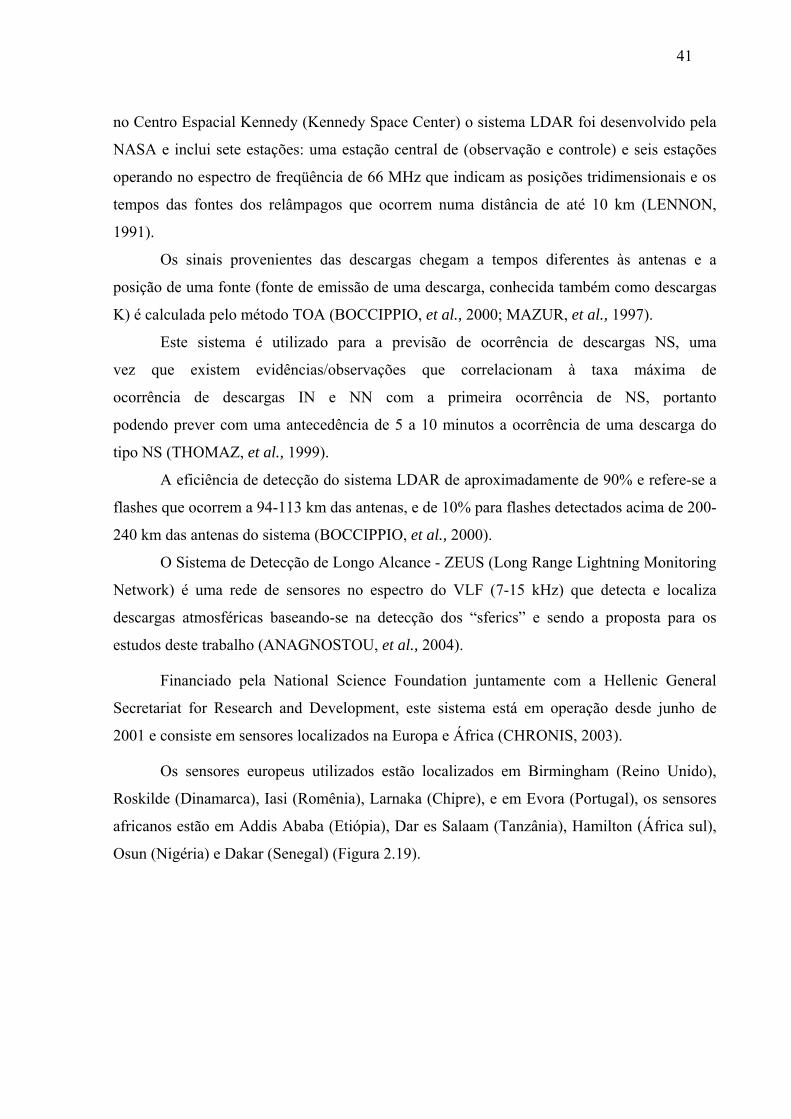
41
no Centro Espacial Kennedy (Kennedy Space Center) o sistema LDAR foi desenvolvido pela
NASA e inclui sete estações: uma estação central de (observação e controle) e seis estações
operando no espectro de freqüência de 66 MHz que indicam as posições tridimensionais e os
tempos das fontes dos relâmpagos que ocorrem numa distância de até 10 km (LENNON,
1991).
Os sinais provenientes das descargas chegam a tempos diferentes às antenas e a
posição de uma fonte (fonte de emissão de uma descarga, conhecida também como descargas
K) é calculada pelo método TOA (BOCCIPPIO, et al., 2000; MAZUR, et al., 1997).
Este sistema é utilizado para a previsão de ocorrência de descargas NS, uma
vez que existem evidências/observações que correlacionam à taxa máxima de
ocorrência de descargas IN e NN com a primeira ocorrência de NS, portanto
podendo prever com uma antecedência de 5 a 10 minutos a ocorrência de uma descarga do
tipo NS (THOMAZ, et al., 1999).
A eficiência de detecção do sistema LDAR de aproximadamente de 90% e refere-se a
flashes que ocorrem a 94-113 km das antenas, e de 10% para flashes detectados acima de 200-
240 km das antenas do sistema (BOCCIPPIO, et al., 2000).
O Sistema de Detecção de Longo Alcance - ZEUS (Long Range Lightning Monitoring
Network) é uma rede de sensores no espectro do VLF (7-15 kHz) que detecta e localiza
descargas atmosféricas baseando-se na detecção dos “sferics” e sendo a proposta para os
estudos deste trabalho (ANAGNOSTOU, et al., 2004).
Financiado pela National Science Foundation juntamente com a Hellenic General
Secretariat for Research and Development, este sistema está em operação desde junho de
2001 e consiste em sensores localizados na Europa e África (CHRONIS, 2003).
Os sensores europeus utilizados estão localizados em Birmingham (Reino Unido),
Roskilde (Dinamarca), Iasi (Romênia), Larnaka (Chipre), e em Evora (Portugal), os sensores
africanos estão em Addis Ababa (Etiópia), Dar es Salaam (Tanzânia), Hamilton (África sul),
Osun (Nigéria) e Dakar (Senegal) (Figura 2.19).
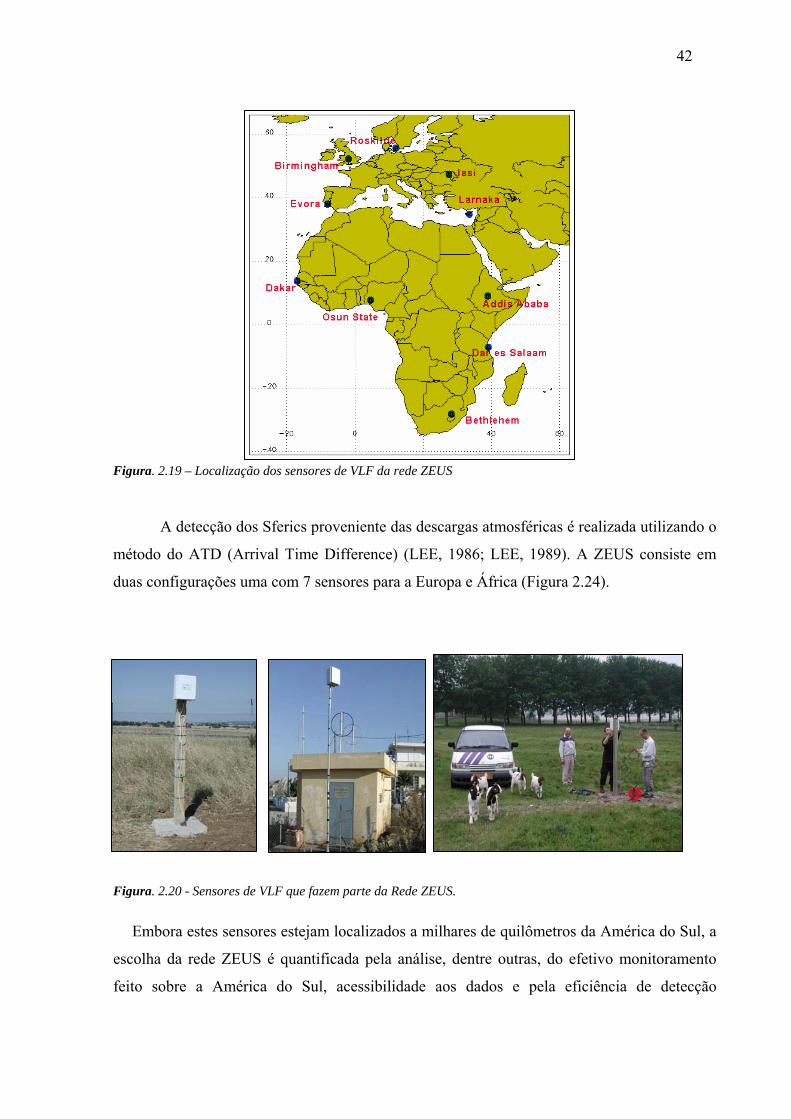
42
Figura. 2.19 – Localização dos sensores de VLF da rede ZEUS
A detecção dos Sferics proveniente das descargas atmosféricas é realizada utilizando o
método do ATD (Arrival Time Difference) (LEE, 1986; LEE, 1989). A ZEUS consiste em
duas configurações uma com 7 sensores para a Europa e África (Figura 2.24).
Figura. 2.20 - Sensores de VLF que fazem parte da Rede ZEUS.
Embora estes sensores estejam localizados a milhares de quilômetros da América do Sul, a
escolha da rede ZEUS é quantificada pela análise, dentre outras, do efetivo monitoramento
feito sobre a América do Sul, acessibilidade aos dados e pela eficiência de detecção
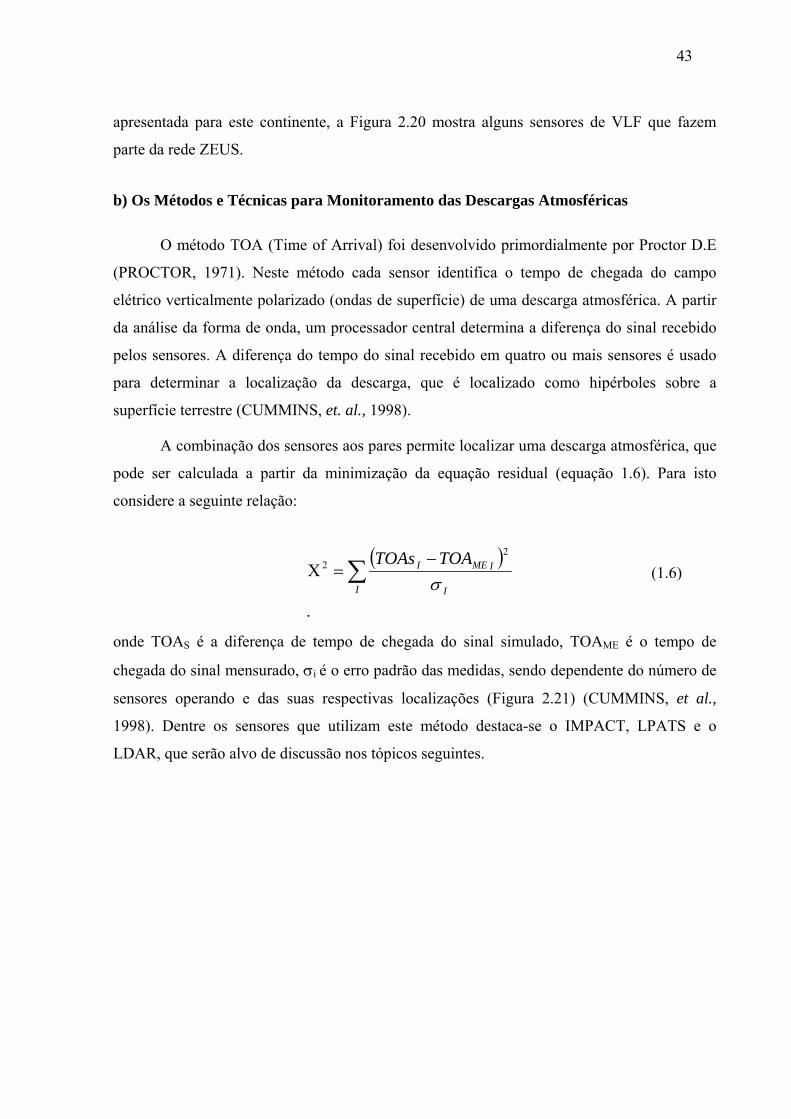
43
apresentada para este continente, a Figura 2.20 mostra alguns sensores de VLF que fazem
parte da rede ZEUS.
b) Os Métodos e Técnicas para Monitoramento das Descargas Atmosféricas
O método TOA (Time of Arrival) foi desenvolvido primordialmente por Proctor D.E
(PROCTOR, 1971). Neste método cada sensor identifica o tempo de chegada do campo
elétrico verticalmente polarizado (ondas de superfície) de uma descarga atmosférica. A partir
da análise da forma de onda, um processador central determina a diferença do sinal recebido
pelos sensores. A diferença do tempo do sinal recebido em quatro ou mais sensores é usado
para determinar a localização da descarga, que é localizado como hipérboles sobre a
superfície terrestre (CUMMINS, et. al., 1998).
A combinação dos sensores aos pares permite localizar uma descarga atmosférica, que
pode ser calculada a partir da minimização da equação residual (equação 1.6). Para isto
considere a seguinte relação:
onde TOAS é a diferença de tempo de chegada do sinal simulado, TOAME é o tempo de
chegada do sinal mensurado, σi é o erro padrão das medidas, sendo dependente do número de
sensores operando e das suas respectivas localizações (Figura 2.21) (CUMMINS, et al.,
1998). Dentre os sensores que utilizam este método destaca-se o IMPACT, LPATS e o
LDAR, que serão alvo de discussão nos tópicos seguintes.
( )
.
22 ∑
−=Χ
I I
IMEI TOATOAsσ
(1.6)
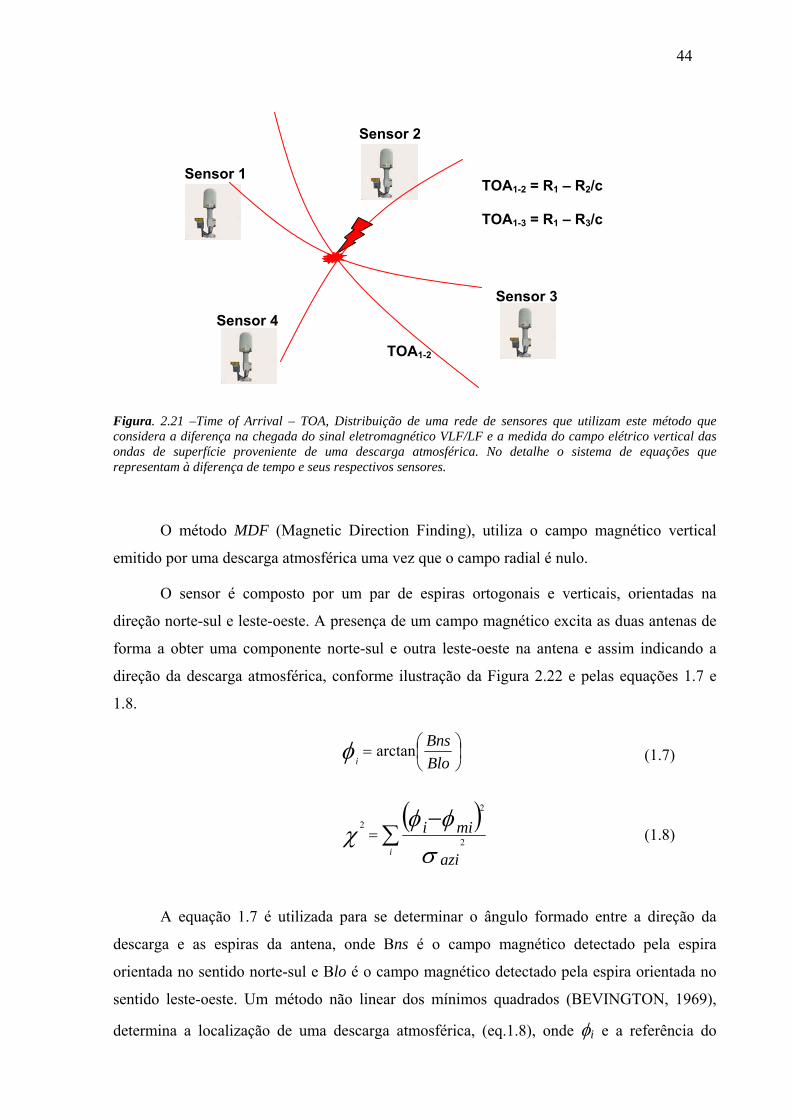
44
Figura. 2.21 –Time of Arrival – TOA, Distribuição de uma rede de sensores que utilizam este método que considera a diferença na chegada do sinal eletromagnético VLF/LF e a medida do campo elétrico vertical das ondas de superfície proveniente de uma descarga atmosférica. No detalhe o sistema de equações que representam à diferença de tempo e seus respectivos sensores.
O método MDF (Magnetic Direction Finding), utiliza o campo magnético vertical
emitido por uma descarga atmosférica uma vez que o campo radial é nulo.
O sensor é composto por um par de espiras ortogonais e verticais, orientadas na
direção norte-sul e leste-oeste. A presença de um campo magnético excita as duas antenas de
forma a obter uma componente norte-sul e outra leste-oeste na antena e assim indicando a
direção da descarga atmosférica, conforme ilustração da Figura 2.22 e pelas equações 1.7 e
1.8.
A equação 1.7 é utilizada para se determinar o ângulo formado entre a direção da
descarga e as espiras da antena, onde Bns é o campo magnético detectado pela espira
orientada no sentido norte-sul e Blo é o campo magnético detectado pela espira orientada no
sentido leste-oeste. Um método não linear dos mínimos quadrados (BEVINGTON, 1969),
determina a localização de uma descarga atmosférica, (eq.1.8), onde φi e a referência do
Sensor 1
Sensor 4
Sensor 2
Sensor 3
TOA1-2 = R1 – R2/c TOA1-3 = R1 – R3/c
TOA1-2
( )∑
−=
⎟⎠⎞
⎜⎝⎛=
i
i
azi
mii
BloBns
σφφ
χ
φ
2
2
2
arctan (1.7)
(1.8)
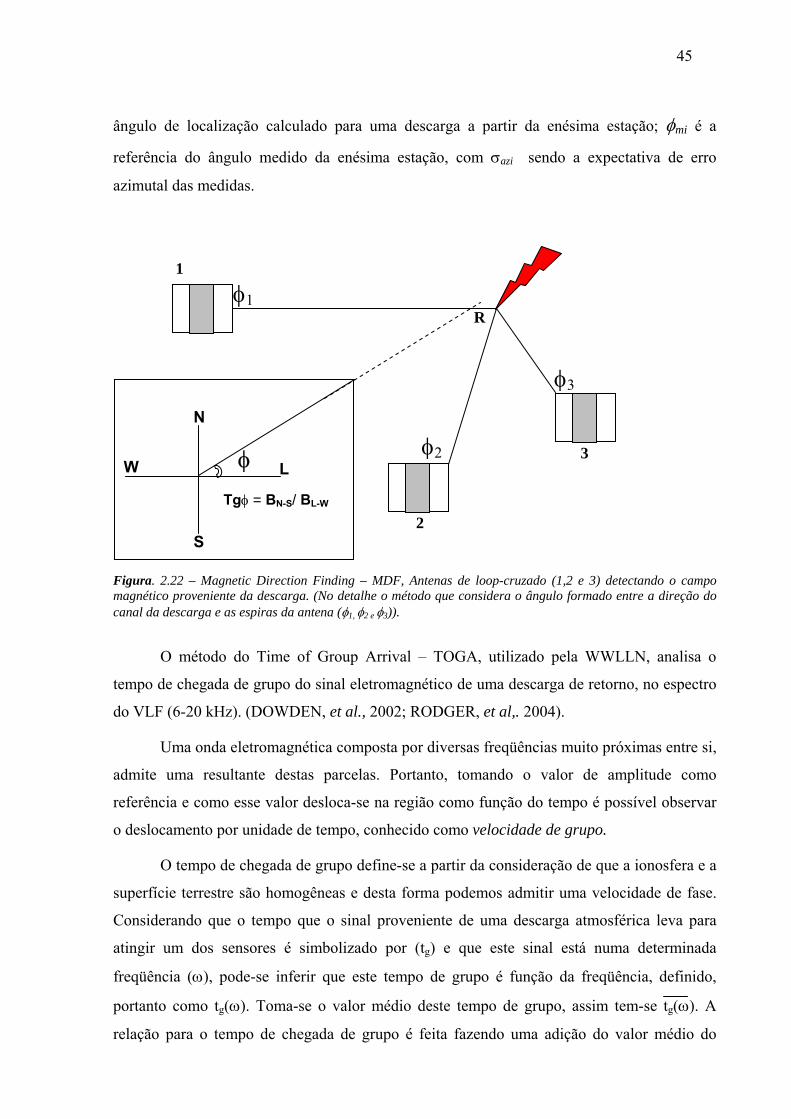
45
ângulo de localização calculado para uma descarga a partir da enésima estação; φmi é a
referência do ângulo medido da enésima estação, com σazi sendo a expectativa de erro
azimutal das medidas.
Figura. 2.22 – Magnetic Direction Finding – MDF, Antenas de loop-cruzado (1,2 e 3) detectando o campo magnético proveniente da descarga. (No detalhe o método que considera o ângulo formado entre a direção do canal da descarga e as espiras da antena (φ1, φ2 e φ3)).
O método do Time of Group Arrival – TOGA, utilizado pela WWLLN, analisa o
tempo de chegada de grupo do sinal eletromagnético de uma descarga de retorno, no espectro
do VLF (6-20 kHz). (DOWDEN, et al., 2002; RODGER, et al,. 2004).
Uma onda eletromagnética composta por diversas freqüências muito próximas entre si,
admite uma resultante destas parcelas. Portanto, tomando o valor de amplitude como
referência e como esse valor desloca-se na região como função do tempo é possível observar
o deslocamento por unidade de tempo, conhecido como velocidade de grupo.
O tempo de chegada de grupo define-se a partir da consideração de que a ionosfera e a
superfície terrestre são homogêneas e desta forma podemos admitir uma velocidade de fase.
Considerando que o tempo que o sinal proveniente de uma descarga atmosférica leva para
atingir um dos sensores é simbolizado por (tg) e que este sinal está numa determinada
freqüência (ω), pode-se inferir que este tempo de grupo é função da freqüência, definido,
portanto como tg(ω). Toma-se o valor médio deste tempo de grupo, assim tem-se tg(ω). A
relação para o tempo de chegada de grupo é feita fazendo uma adição do valor médio do
1
2
3
R φ1
φ2
φ3
W L
S
N
φ
Tgφ = BN-S/ BL-W
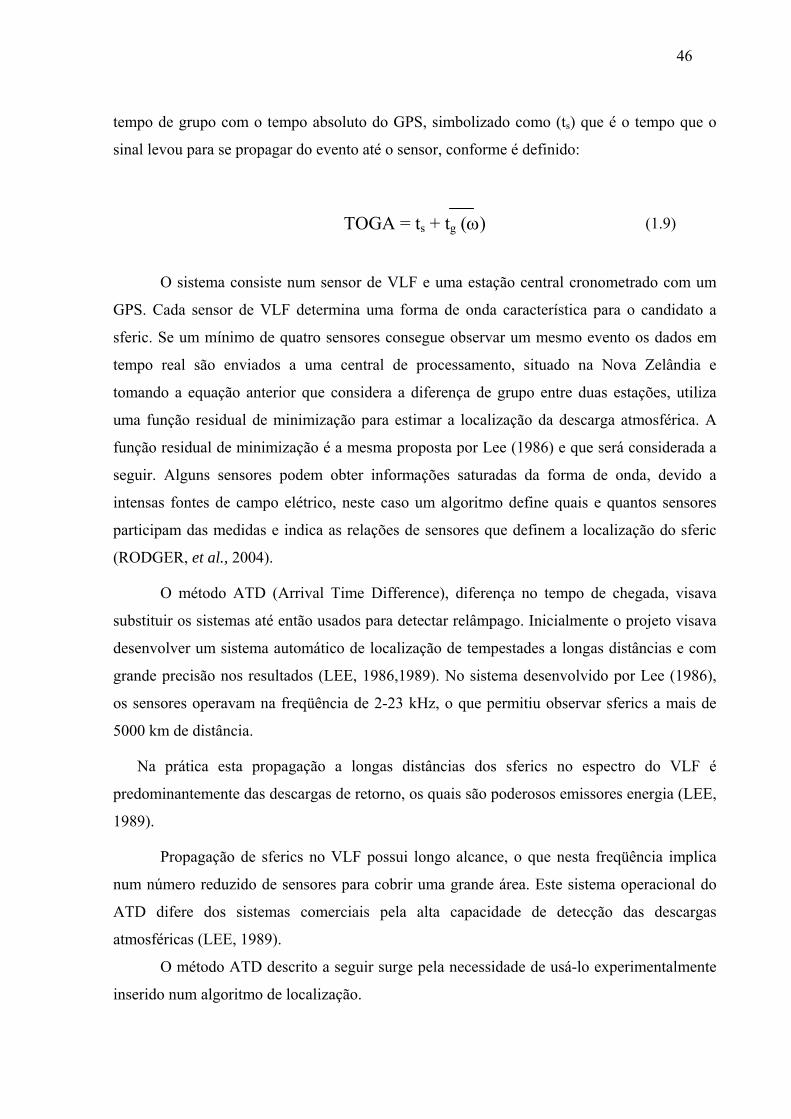
46
tempo de grupo com o tempo absoluto do GPS, simbolizado como (ts) que é o tempo que o
sinal levou para se propagar do evento até o sensor, conforme é definido:
TOGA = ts + tg (ω)
O sistema consiste num sensor de VLF e uma estação central cronometrado com um
GPS. Cada sensor de VLF determina uma forma de onda característica para o candidato a
sferic. Se um mínimo de quatro sensores consegue observar um mesmo evento os dados em
tempo real são enviados a uma central de processamento, situado na Nova Zelândia e
tomando a equação anterior que considera a diferença de grupo entre duas estações, utiliza
uma função residual de minimização para estimar a localização da descarga atmosférica. A
função residual de minimização é a mesma proposta por Lee (1986) e que será considerada a
seguir. Alguns sensores podem obter informações saturadas da forma de onda, devido a
intensas fontes de campo elétrico, neste caso um algoritmo define quais e quantos sensores
participam das medidas e indica as relações de sensores que definem a localização do sferic
(RODGER, et al., 2004).
O método ATD (Arrival Time Difference), diferença no tempo de chegada, visava
substituir os sistemas até então usados para detectar relâmpago. Inicialmente o projeto visava
desenvolver um sistema automático de localização de tempestades a longas distâncias e com
grande precisão nos resultados (LEE, 1986,1989). No sistema desenvolvido por Lee (1986),
os sensores operavam na freqüência de 2-23 kHz, o que permitiu observar sferics a mais de
5000 km de distância.
Na prática esta propagação a longas distâncias dos sferics no espectro do VLF é
predominantemente das descargas de retorno, os quais são poderosos emissores energia (LEE,
1989).
Propagação de sferics no VLF possui longo alcance, o que nesta freqüência implica
num número reduzido de sensores para cobrir uma grande área. Este sistema operacional do
ATD difere dos sistemas comerciais pela alta capacidade de detecção das descargas
atmosféricas (LEE, 1989).
O método ATD descrito a seguir surge pela necessidade de usá-lo experimentalmente
inserido num algoritmo de localização.
(1.9)
47
O campo elétrico vertical proveniente de uma descarga atmosférica é medido por
sensores no VLF e o sinal analógico da sua forma de onda é convertido para um sinal digital
sincronizado com um GPS. Estas formas de onda são compactadas por um software e
transmitidas para um computador central via internet. Os candidatos a fontes de sferics são
analisados em relação aos diferentes sensores com a finalidade de extrair os valores de ATD.
Os valores de ATD serão utilizados para localizar efetivamente uma descarga atmosférica
(Figura 2.23).
Os sensores normalmente operam independentemente, cuja combinação aos pares
pode variar dependendo de quais sensores estavam operando no momento da ocorrência deste
evento. A diferença entre o tempo de chegada dos sferics em dois sensores admite uma região
sobre a superfície terrestre de possível localização de uma descarga atmosférica. Estas regiões
são caracterizadas por hipérboles sobre esta região do globo, assim a combinação de várias
medidas de outros sensores, resulta na intersecção destas hipérboles que por sua vez define a
localização de um sferic (LEE, 1986) (Figura 2.23).
Figura. 2.23 – ATDs sobre o globo representado por hipérboles e cuja intersecção identifica a localização de um sferic.
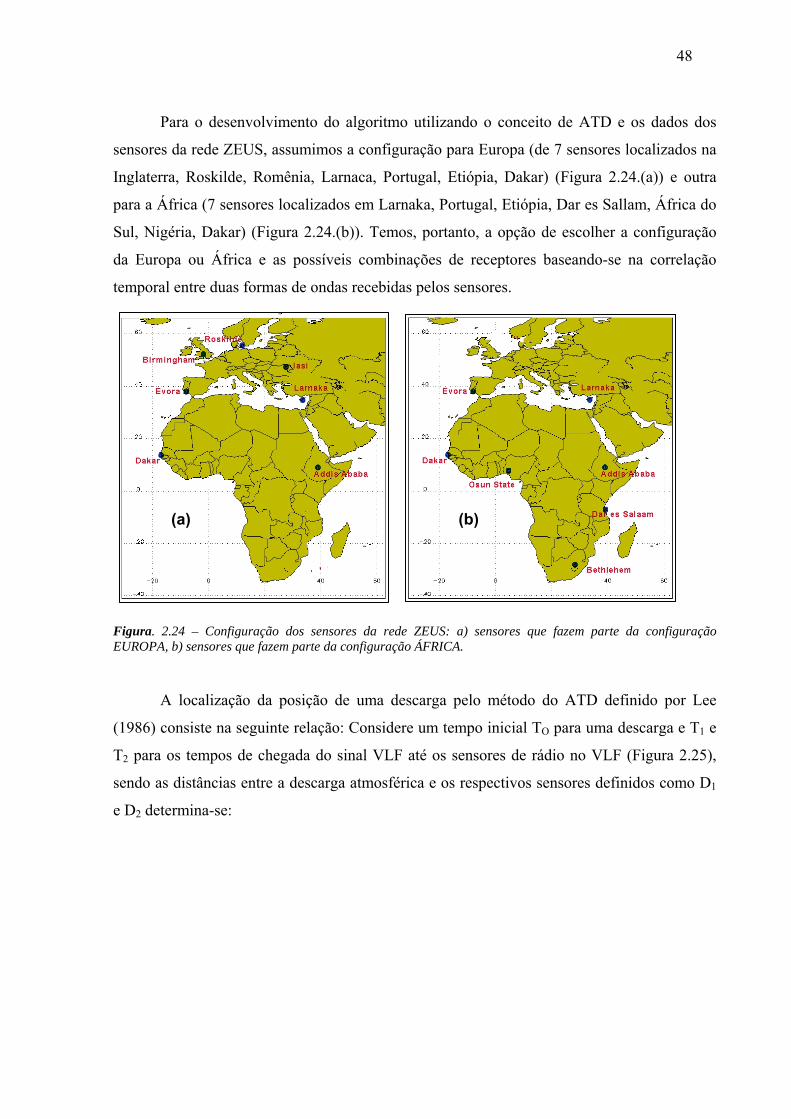
48
Para o desenvolvimento do algoritmo utilizando o conceito de ATD e os dados dos
sensores da rede ZEUS, assumimos a configuração para Europa (de 7 sensores localizados na
Inglaterra, Roskilde, Romênia, Larnaca, Portugal, Etiópia, Dakar) (Figura 2.24.(a)) e outra
para a África (7 sensores localizados em Larnaka, Portugal, Etiópia, Dar es Sallam, África do
Sul, Nigéria, Dakar) (Figura 2.24.(b)). Temos, portanto, a opção de escolher a configuração
da Europa ou África e as possíveis combinações de receptores baseando-se na correlação
temporal entre duas formas de ondas recebidas pelos sensores.
Figura. 2.24 – Configuração dos sensores da rede ZEUS: a) sensores que fazem parte da configuração EUROPA, b) sensores que fazem parte da configuração ÁFRICA.
A localização da posição de uma descarga pelo método do ATD definido por Lee
(1986) consiste na seguinte relação: Considere um tempo inicial TO para uma descarga e T1 e
T2 para os tempos de chegada do sinal VLF até os sensores de rádio no VLF (Figura 2.25),
sendo as distâncias entre a descarga atmosférica e os respectivos sensores definidos como D1
e D2 determina-se:
(a)
(a) (b)
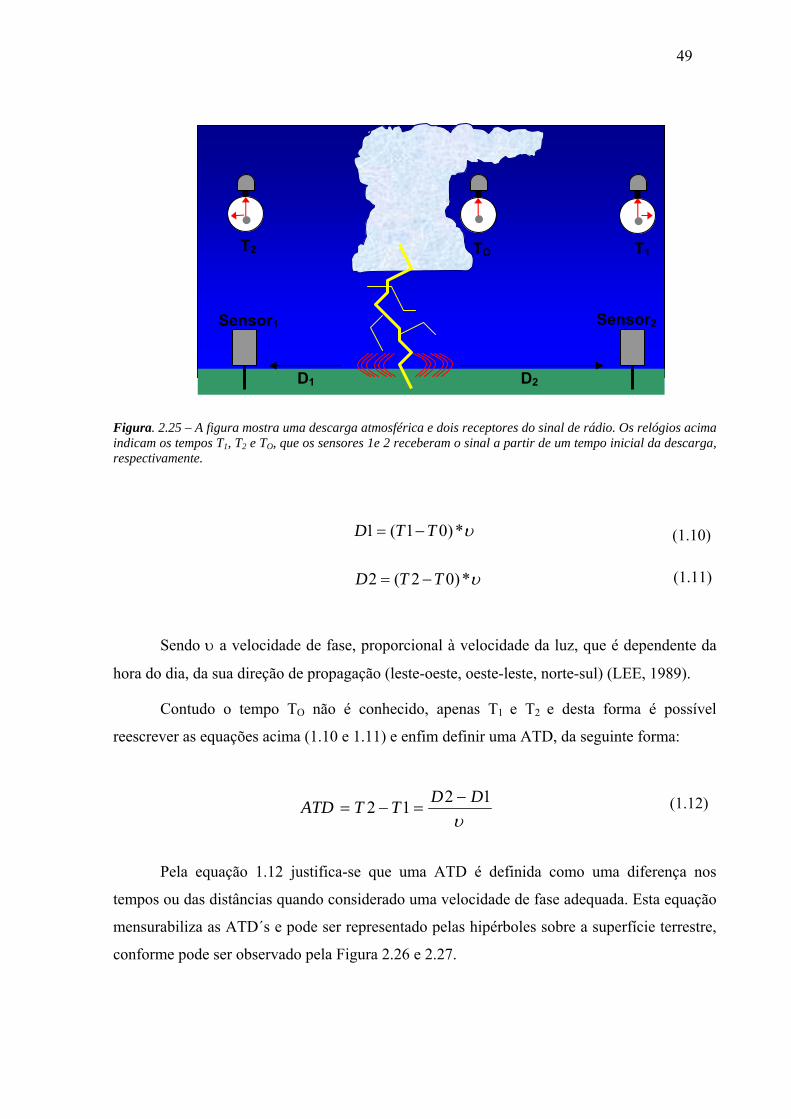
49
Figura. 2.25 – A figura mostra uma descarga atmosférica e dois receptores do sinal de rádio. Os relógios acima indicam os tempos T1, T2 e TO, que os sensores 1e 2 receberam o sinal a partir de um tempo inicial da descarga, respectivamente.
Sendo υ a velocidade de fase, proporcional à velocidade da luz, que é dependente da
hora do dia, da sua direção de propagação (leste-oeste, oeste-leste, norte-sul) (LEE, 1989).
Contudo o tempo TO não é conhecido, apenas T1 e T2 e desta forma é possível
reescrever as equações acima (1.10 e 1.11) e enfim definir uma ATD, da seguinte forma:
Pela equação 1.12 justifica-se que uma ATD é definida como uma diferença nos
tempos ou das distâncias quando considerado uma velocidade de fase adequada. Esta equação
mensurabiliza as ATD´s e pode ser representado pelas hipérboles sobre a superfície terrestre,
conforme pode ser observado pela Figura 2.26 e 2.27.
υ*)01(1 TTD −=
υ*)02(2 TTD −=
(1.10)
(1.11)
υ1212 DDTTATD −
=−= (1.12)
. . . TO T1 T2
D1 D2
Sensor1 Sensor2
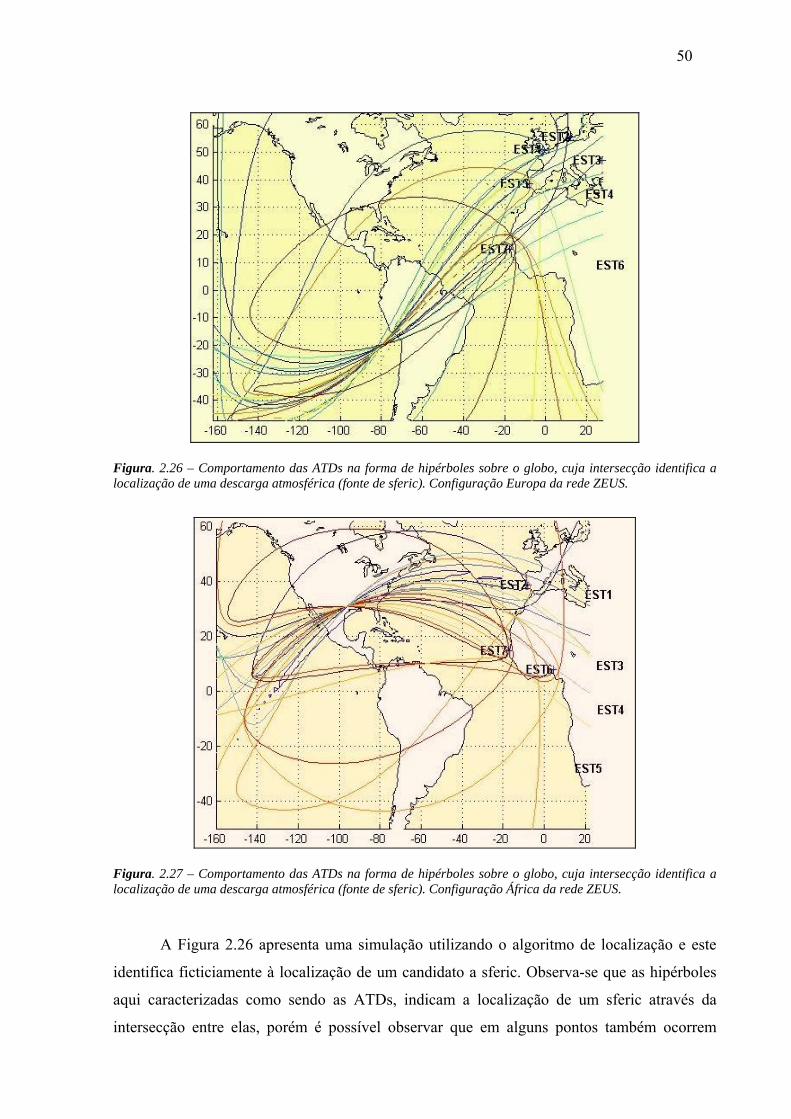
50
Figura. 2.26 – Comportamento das ATDs na forma de hipérboles sobre o globo, cuja intersecção identifica a localização de uma descarga atmosférica (fonte de sferic). Configuração Europa da rede ZEUS.
Figura. 2.27 – Comportamento das ATDs na forma de hipérboles sobre o globo, cuja intersecção identifica a localização de uma descarga atmosférica (fonte de sferic). Configuração África da rede ZEUS.
A Figura 2.26 apresenta uma simulação utilizando o algoritmo de localização e este
identifica ficticiamente à localização de um candidato a sferic. Observa-se que as hipérboles
aqui caracterizadas como sendo as ATDs, indicam a localização de um sferic através da
intersecção entre elas, porém é possível observar que em alguns pontos também ocorrem
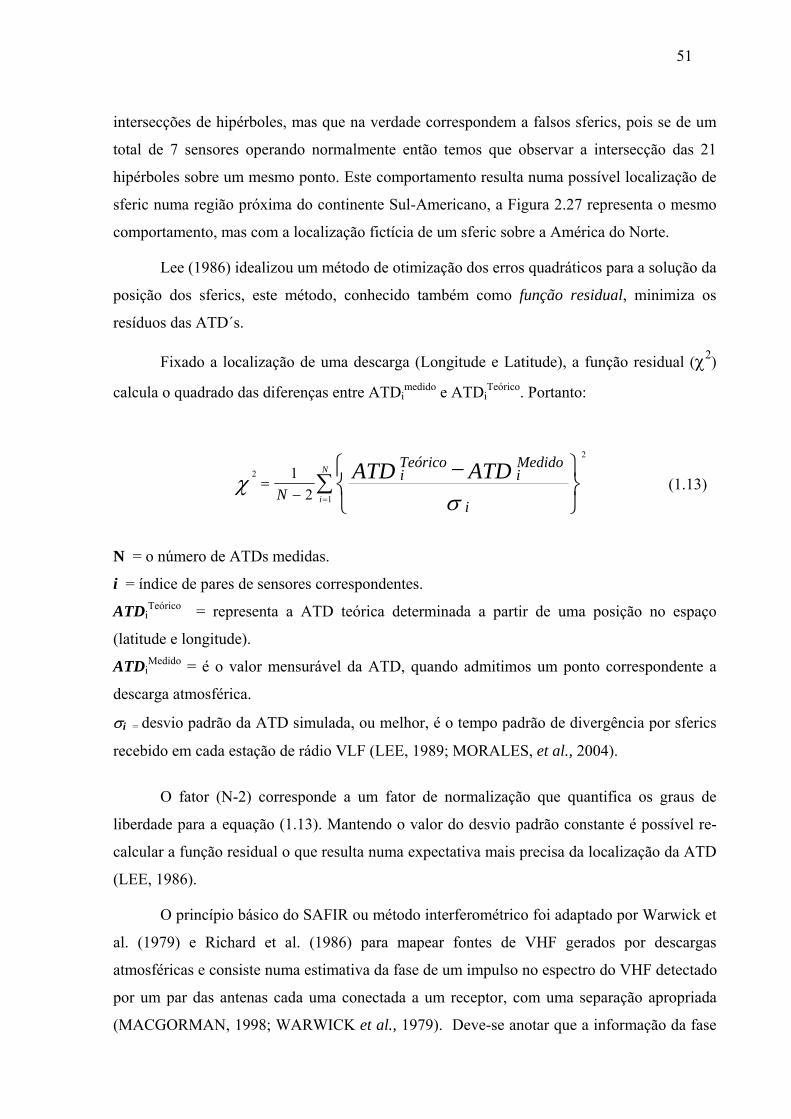
51
intersecções de hipérboles, mas que na verdade correspondem a falsos sferics, pois se de um
total de 7 sensores operando normalmente então temos que observar a intersecção das 21
hipérboles sobre um mesmo ponto. Este comportamento resulta numa possível localização de
sferic numa região próxima do continente Sul-Americano, a Figura 2.27 representa o mesmo
comportamento, mas com a localização fictícia de um sferic sobre a América do Norte.
Lee (1986) idealizou um método de otimização dos erros quadráticos para a solução da
posição dos sferics, este método, conhecido também como função residual, minimiza os
resíduos das ATD´s.
Fixado a localização de uma descarga (Longitude e Latitude), a função residual (χ2)
calcula o quadrado das diferenças entre ATDimedido e ATDi
Teórico. Portanto:
N = o número de ATDs medidas.
i = índice de pares de sensores correspondentes.
ATDiTeórico = representa a ATD teórica determinada a partir de uma posição no espaço
(latitude e longitude).
ATDiMedido = é o valor mensurável da ATD, quando admitimos um ponto correspondente a
descarga atmosférica.
σi = desvio padrão da ATD simulada, ou melhor, é o tempo padrão de divergência por sferics
recebido em cada estação de rádio VLF (LEE, 1989; MORALES, et al., 2004).
O fator (N-2) corresponde a um fator de normalização que quantifica os graus de
liberdade para a equação (1.13). Mantendo o valor do desvio padrão constante é possível re-
calcular a função residual o que resulta numa expectativa mais precisa da localização da ATD
(LEE, 1986).
O princípio básico do SAFIR ou método interferométrico foi adaptado por Warwick et
al. (1979) e Richard et al. (1986) para mapear fontes de VHF gerados por descargas
atmosféricas e consiste numa estimativa da fase de um impulso no espectro do VHF detectado
por um par das antenas cada uma conectada a um receptor, com uma separação apropriada
(MACGORMAN, 1998; WARWICK et al., 1979). Deve-se anotar que a informação da fase
∑⎭⎬⎫
⎩⎨⎧ −
=−=
N
i i
Medidoi
Teóricoi
NATDATD
1
2
2
21
σχ (1.13)
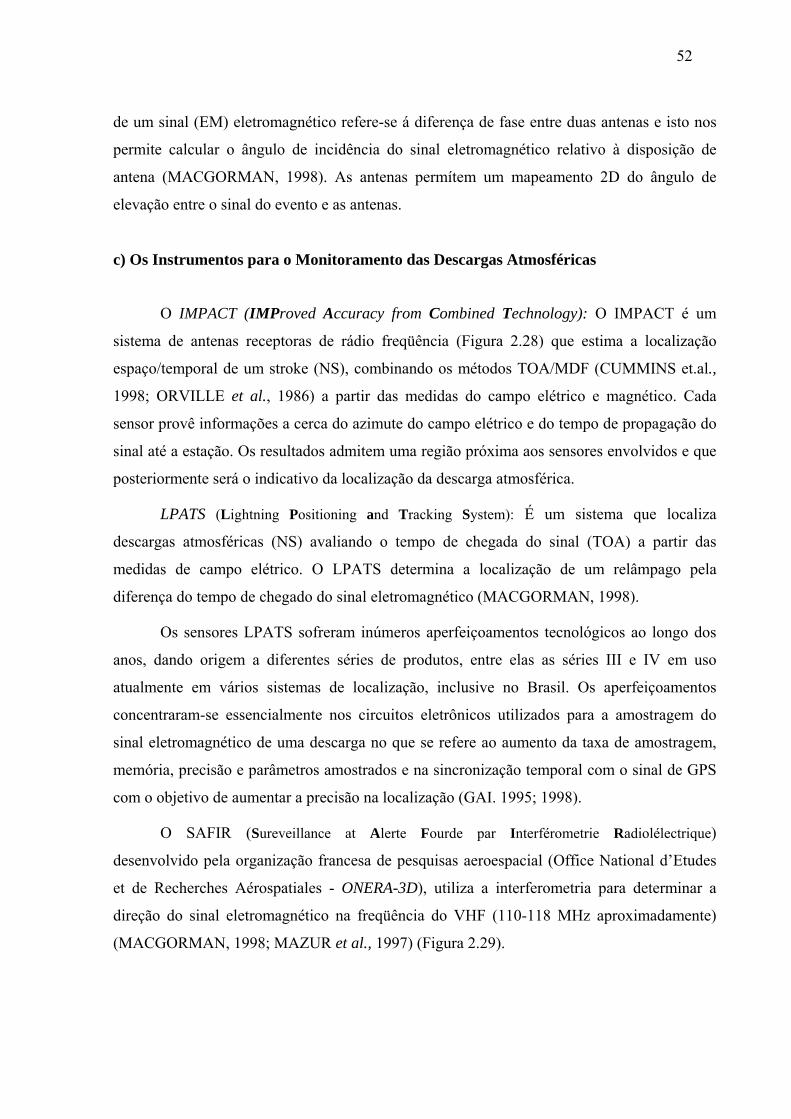
52
de um sinal (EM) eletromagnético refere-se á diferença de fase entre duas antenas e isto nos
permite calcular o ângulo de incidência do sinal eletromagnético relativo à disposição de
antena (MACGORMAN, 1998). As antenas permítem um mapeamento 2D do ângulo de
elevação entre o sinal do evento e as antenas.
c) Os Instrumentos para o Monitoramento das Descargas Atmosféricas
O IMPACT (IMProved Accuracy from Combined Technology): O IMPACT é um
sistema de antenas receptoras de rádio freqüência (Figura 2.28) que estima a localização
espaço/temporal de um stroke (NS), combinando os métodos TOA/MDF (CUMMINS et.al.,
1998; ORVILLE et al., 1986) a partir das medidas do campo elétrico e magnético. Cada
sensor provê informações a cerca do azimute do campo elétrico e do tempo de propagação do
sinal até a estação. Os resultados admitem uma região próxima aos sensores envolvidos e que
posteriormente será o indicativo da localização da descarga atmosférica.
LPATS (Lightning Positioning and Tracking System): É um sistema que localiza
descargas atmosféricas (NS) avaliando o tempo de chegada do sinal (TOA) a partir das
medidas de campo elétrico. O LPATS determina a localização de um relâmpago pela
diferença do tempo de chegado do sinal eletromagnético (MACGORMAN, 1998).
Os sensores LPATS sofreram inúmeros aperfeiçoamentos tecnológicos ao longo dos
anos, dando origem a diferentes séries de produtos, entre elas as séries III e IV em uso
atualmente em vários sistemas de localização, inclusive no Brasil. Os aperfeiçoamentos
concentraram-se essencialmente nos circuitos eletrônicos utilizados para a amostragem do
sinal eletromagnético de uma descarga no que se refere ao aumento da taxa de amostragem,
memória, precisão e parâmetros amostrados e na sincronização temporal com o sinal de GPS
com o objetivo de aumentar a precisão na localização (GAI. 1995; 1998).
O SAFIR (Sureveillance at Alerte Fourde par Interférometrie Radiolélectrique)
desenvolvido pela organização francesa de pesquisas aeroespacial (Office National d’Etudes
et de Recherches Aérospatiales - ONERA-3D), utiliza a interferometria para determinar a
direção do sinal eletromagnético na freqüência do VHF (110-118 MHz aproximadamente)
(MACGORMAN, 1998; MAZUR et al., 1997) (Figura 2.29).
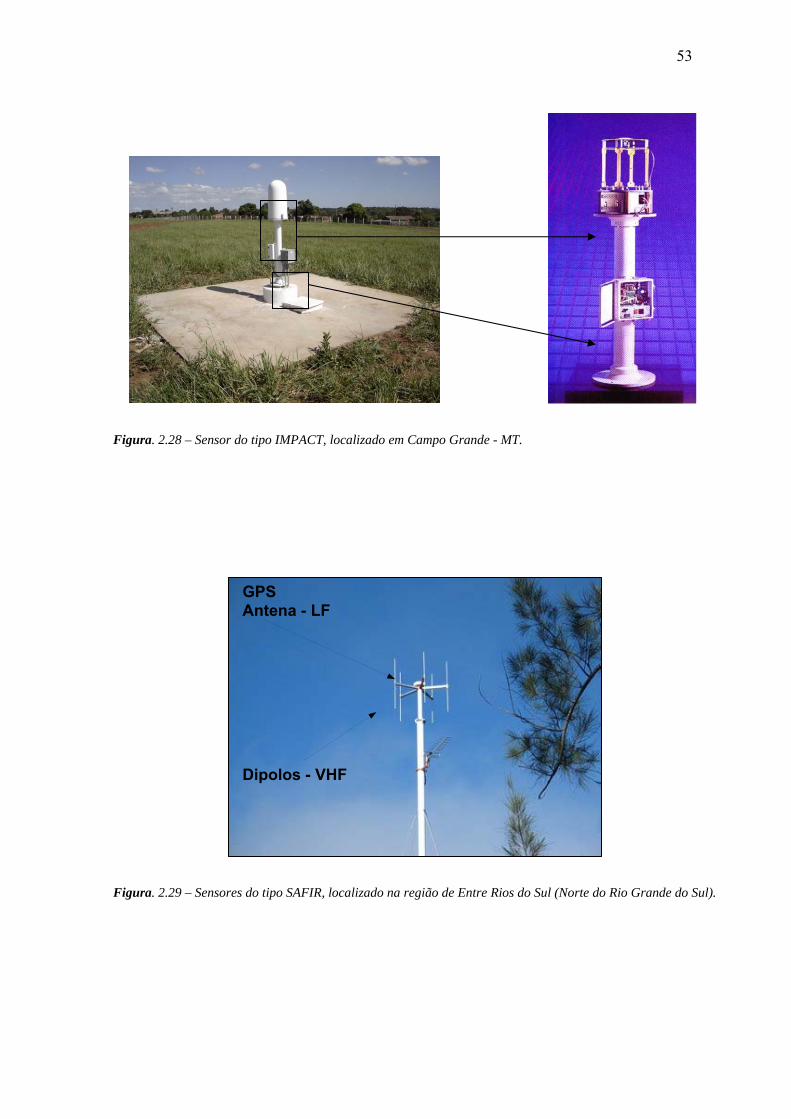
53
Figura. 2.28 – Sensor do tipo IMPACT, localizado em Campo Grande - MT.
Figura. 2.29 – Sensores do tipo SAFIR, localizado na região de Entre Rios do Sul (Norte do Rio Grande do Sul).
GPS Antena - LF
Dipolos - VHF
54
CAPÍTULO 3
DADOS E METODOLOGIA
3.1 DESCRIÇÃO DOS DADOS COLETADOS
A introdução deste capítulo se segue frisando os objetivos conforme mencionado no
ítem 1.4, na qual este estudo visa avaliar os erros de localização da rede ZEUS sobre o Brasil,
para tanto os dados de descargas atmosféricas da rede ZEUS serão comparados com uma rede
consolidada de monitoramento de descargas atmosféricas sobre o Brasil, RINDAT.
Os dados de strokes da RINDAT utilizados neste estudo compreendem o período de
Julho de 2004 à Janeiro de 2005 e foram fornecidos por FURNAS Centrais Elétricas e o
grupo de Eletricidade Atmosférica – ELAT do INPE. Enquanto que os dados de sferics da
ZEUS foram cedidos pela Universidade de Connecticut.
A seguir, convenientemente retomaremos uma breve descrição da rede ZEUS e
RINDAT para compreender formalmente como a descrição destes sistemas.
ZEUS O Sistema de Detecção de Descargas Atmosféricas de Longo Alcance – ZEUS (Long
Range Lightning Monitoring Network) foi inicialmente estabelecido em Junho de 2001 pelo
Hellenic General Secretariat for Research and Development a partir da instalação de 7
sensores de rádio na freqüência de VLF sobre o continente Europeu, (CHRONIS, 2003). Mais
tarde em 2003, a National Science Foundation financiou a aquisição de mais 4 sensores de
VLF para o continente Africano.
55
O sistema ZEUS é uma rede de sensores que operam no espectro do VLF (7-15 kHz)
que detectam e localizam descargas atmosféricas baseando-se na detecção dos “sferics”, sobre
o continente africano e europeu (ANAGNOSTOU, et al., 2004; CHRONIS, 2003).
Sferics são ruídos emitidos por descargas atmosféricas observadas nas ondas de rádio,
sendo que apresentam uma potência máxima na faixa do espectro do VLF (8 - 10 kHz). Estes
sferics conseguem se propagar a longas distâncias a partir de múltiplas reflexões dentro do
guia de onda formado pela baixa ionosfera e a superfície terrestre.
A rede ZEUS se baseia no trabalho desenvolvido por Lee (1986), aonde o sinal
eletromagnético emitido por um sferics é continuamente monitorado a partir da medida do
campo elétrico vertical por um receptor de rádio em VLF.
O sistema de detecção de descargas atmosféricas da rede ZEUS pode se dividido em
duas partes: receptores do sinal VLF e um computador central que atua como uma estação.
Um esboço simplificado deste sistema é ilustrado em Figura 3.1. Cada receptor consiste de
uma antena de VLF externa, um pré-amplificador, um Sistema de Posicionamento Global
(GPS), um conversor de sinal analógico/digital, e um computador com acesso a comunicação
via internet.
Os dados medidos pelo receptor são digitalizados e arquivados no PC que executa uma
filtragem para classificar prováveis candidatos de sferics e eliminar ruídos (fontes externas
tais como: linhas de transmissão, carros, trem, transmissoras de rádio e etc.).
Posteriormente estes arquivos são comprimidos e enviados em tempo real à estação
central através da internet. Em seguida, o computador central recebe os dados digitais das
formas de onda dos sferic de cada um dos receptores de VLF.
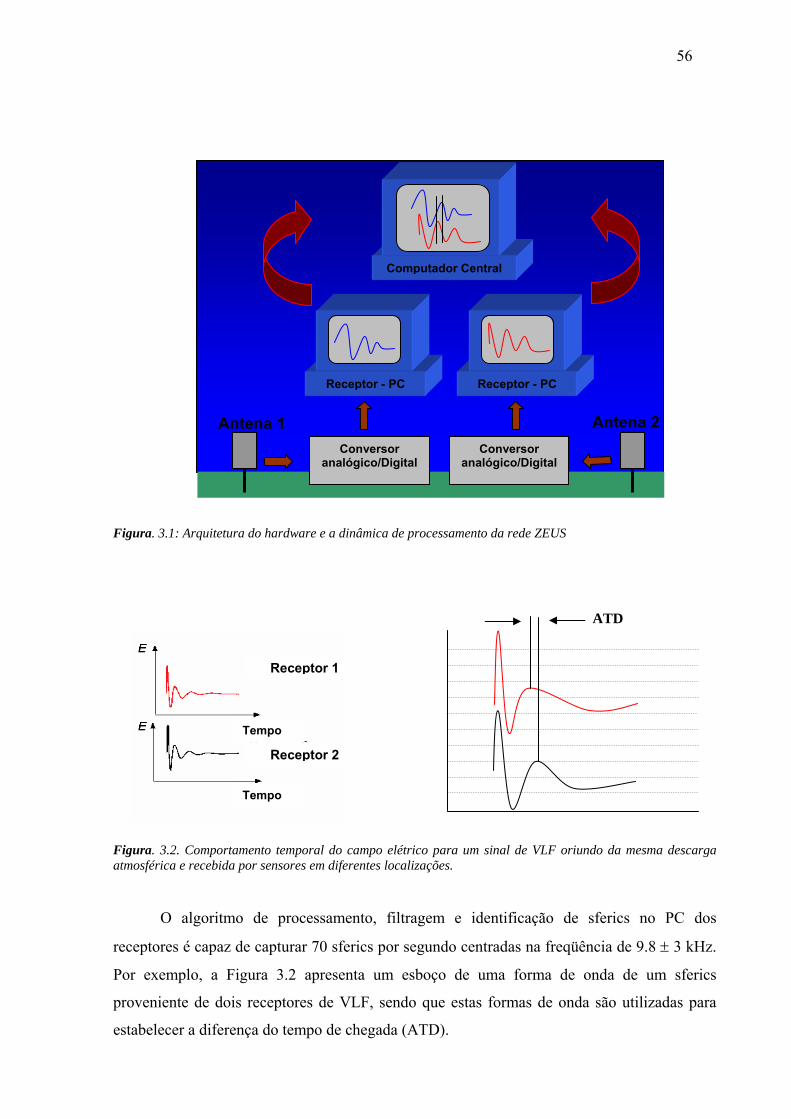
56
Figura. 3.1: Arquitetura do hardware e a dinâmica de processamento da rede ZEUS
Figura. 3.2. Comportamento temporal do campo elétrico para um sinal de VLF oriundo da mesma descarga atmosférica e recebida por sensores em diferentes localizações.
O algoritmo de processamento, filtragem e identificação de sferics no PC dos
receptores é capaz de capturar 70 sferics por segundo centradas na freqüência de 9.8 ± 3 kHz.
Por exemplo, a Figura 3.2 apresenta um esboço de uma forma de onda de um sferics
proveniente de dois receptores de VLF, sendo que estas formas de onda são utilizadas para
estabelecer a diferença do tempo de chegada (ATD).
Antena 1 Antena 2
Conversor analógico/Digital
Conversor analógico/Digital
Receptor - PC Receptor - PC
Computador Central
ATD
Receptor 1
Receptor 2
Tempo
Tempo
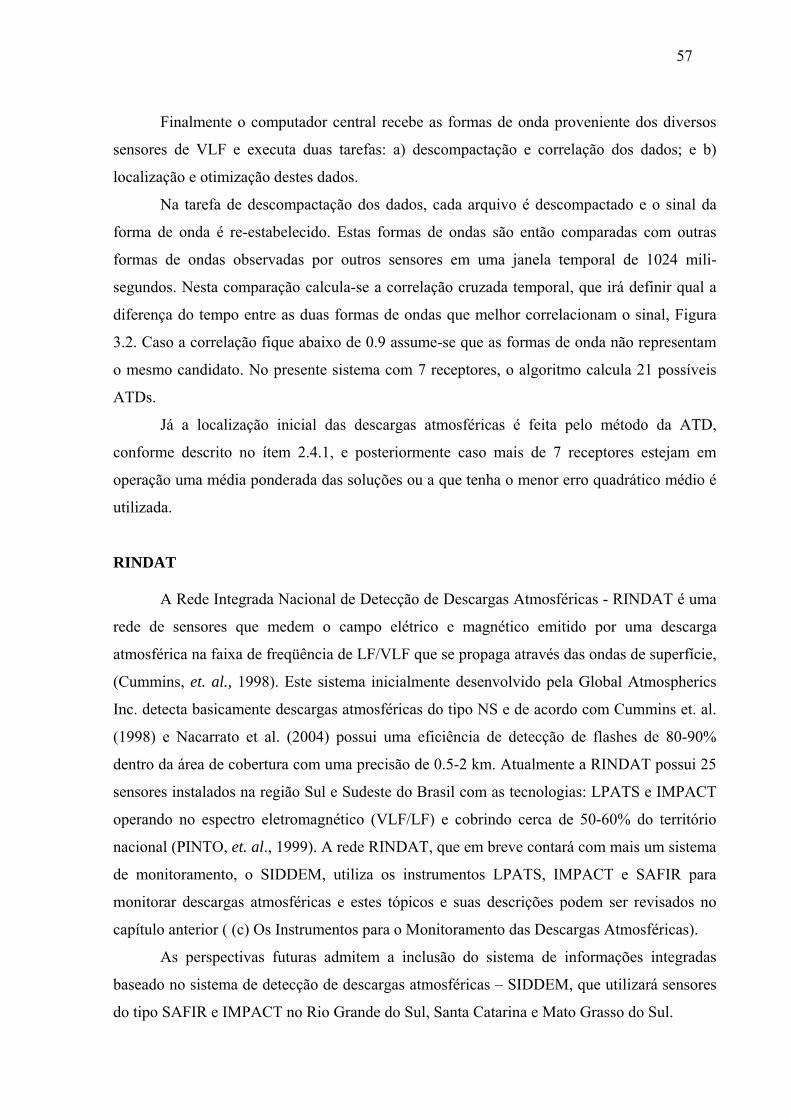
57
Finalmente o computador central recebe as formas de onda proveniente dos diversos
sensores de VLF e executa duas tarefas: a) descompactação e correlação dos dados; e b)
localização e otimização destes dados.
Na tarefa de descompactação dos dados, cada arquivo é descompactado e o sinal da
forma de onda é re-estabelecido. Estas formas de ondas são então comparadas com outras
formas de ondas observadas por outros sensores em uma janela temporal de 1024 mili-
segundos. Nesta comparação calcula-se a correlação cruzada temporal, que irá definir qual a
diferença do tempo entre as duas formas de ondas que melhor correlacionam o sinal, Figura
3.2. Caso a correlação fique abaixo de 0.9 assume-se que as formas de onda não representam
o mesmo candidato. No presente sistema com 7 receptores, o algoritmo calcula 21 possíveis
ATDs.
Já a localização inicial das descargas atmosféricas é feita pelo método da ATD,
conforme descrito no ítem 2.4.1, e posteriormente caso mais de 7 receptores estejam em
operação uma média ponderada das soluções ou a que tenha o menor erro quadrático médio é
utilizada.
RINDAT A Rede Integrada Nacional de Detecção de Descargas Atmosféricas - RINDAT é uma
rede de sensores que medem o campo elétrico e magnético emitido por uma descarga
atmosférica na faixa de freqüência de LF/VLF que se propaga através das ondas de superfície,
(Cummins, et. al., 1998). Este sistema inicialmente desenvolvido pela Global Atmospherics
Inc. detecta basicamente descargas atmosféricas do tipo NS e de acordo com Cummins et. al.
(1998) e Nacarrato et al. (2004) possui uma eficiência de detecção de flashes de 80-90%
dentro da área de cobertura com uma precisão de 0.5-2 km. Atualmente a RINDAT possui 25
sensores instalados na região Sul e Sudeste do Brasil com as tecnologias: LPATS e IMPACT
operando no espectro eletromagnético (VLF/LF) e cobrindo cerca de 50-60% do território
nacional (PINTO, et. al., 1999). A rede RINDAT, que em breve contará com mais um sistema
de monitoramento, o SIDDEM, utiliza os instrumentos LPATS, IMPACT e SAFIR para
monitorar descargas atmosféricas e estes tópicos e suas descrições podem ser revisados no
capítulo anterior ( (c) Os Instrumentos para o Monitoramento das Descargas Atmosféricas).
As perspectivas futuras admitem a inclusão do sistema de informações integradas
baseado no sistema de detecção de descargas atmosféricas – SIDDEM, que utilizará sensores
do tipo SAFIR e IMPACT no Rio Grande do Sul, Santa Catarina e Mato Grasso do Sul.
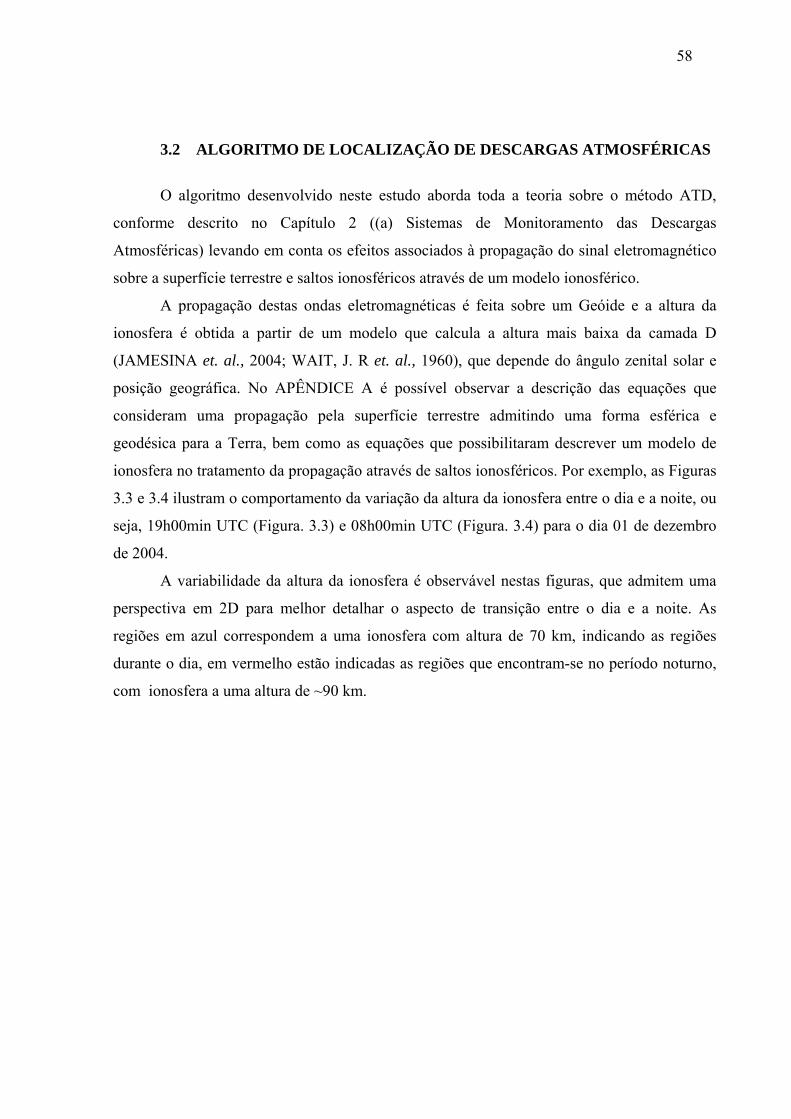
58
3.2 ALGORITMO DE LOCALIZAÇÃO DE DESCARGAS ATMOSFÉRICAS
O algoritmo desenvolvido neste estudo aborda toda a teoria sobre o método ATD,
conforme descrito no Capítulo 2 ((a) Sistemas de Monitoramento das Descargas
Atmosféricas) levando em conta os efeitos associados à propagação do sinal eletromagnético
sobre a superfície terrestre e saltos ionosféricos através de um modelo ionosférico.
A propagação destas ondas eletromagnéticas é feita sobre um Geóide e a altura da
ionosfera é obtida a partir de um modelo que calcula a altura mais baixa da camada D
(JAMESINA et. al., 2004; WAIT, J. R et. al., 1960), que depende do ângulo zenital solar e
posição geográfica. No APÊNDICE A é possível observar a descrição das equações que
consideram uma propagação pela superfície terrestre admitindo uma forma esférica e
geodésica para a Terra, bem como as equações que possibilitaram descrever um modelo de
ionosfera no tratamento da propagação através de saltos ionosféricos. Por exemplo, as Figuras
3.3 e 3.4 ilustram o comportamento da variação da altura da ionosfera entre o dia e a noite, ou
seja, 19h00min UTC (Figura. 3.3) e 08h00min UTC (Figura. 3.4) para o dia 01 de dezembro
de 2004.
A variabilidade da altura da ionosfera é observável nestas figuras, que admitem uma
perspectiva em 2D para melhor detalhar o aspecto de transição entre o dia e a noite. As
regiões em azul correspondem a uma ionosfera com altura de 70 km, indicando as regiões
durante o dia, em vermelho estão indicadas as regiões que encontram-se no período noturno,
com ionosfera a uma altura de ~90 km.
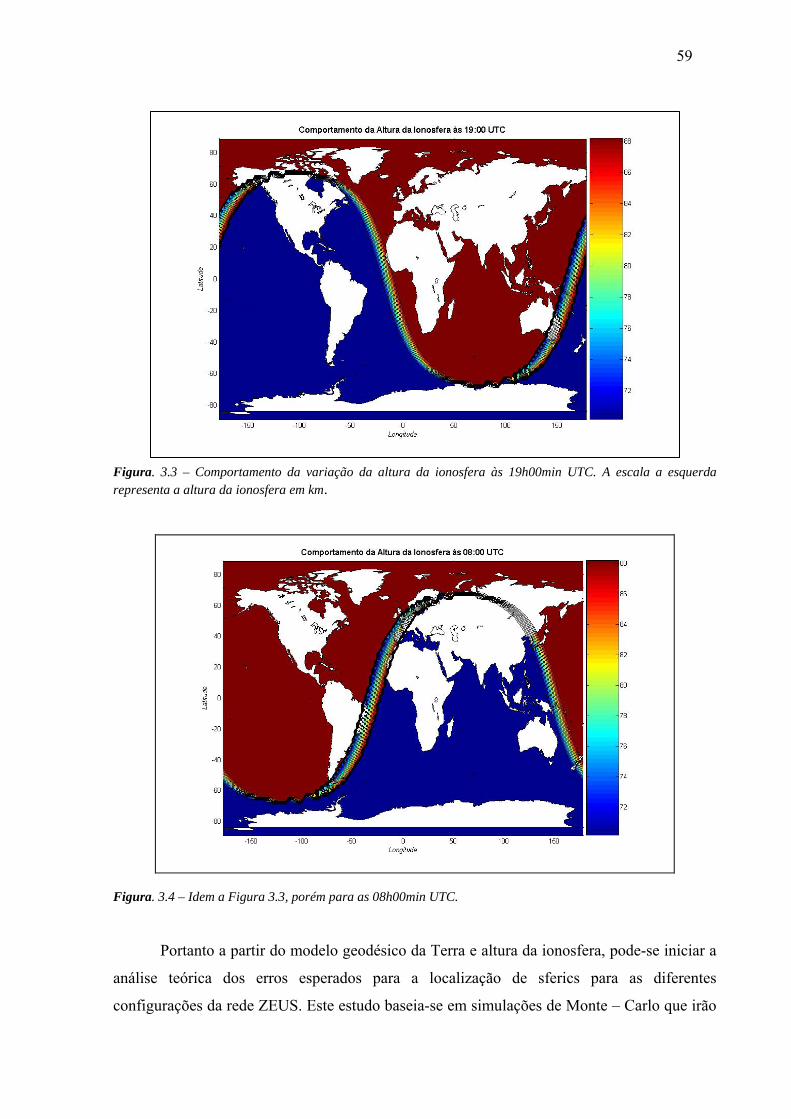
59
Figura. 3.3 – Comportamento da variação da altura da ionosfera às 19h00min UTC. A escala a esquerda representa a altura da ionosfera em km.
Figura. 3.4 – Idem a Figura 3.3, porém para as 08h00min UTC.
Portanto a partir do modelo geodésico da Terra e altura da ionosfera, pode-se iniciar a
análise teórica dos erros esperados para a localização de sferics para as diferentes
configurações da rede ZEUS. Este estudo baseia-se em simulações de Monte – Carlo que irão
60
considerar a propagação do sinal VLF através de saltos ionosféricos ou pela superfície
terrestre.
Inicialmente o algoritmo de Monte-Carlo calcula as ATDs teóricas (“verdadeiras”) e
simula as ATDs medidas a partir de um erro aleatório sobre as ATDs teóricas. Para o cálculo
das ATDs teóricas são simulados diversas condições sobre as quais destacam-se o cálculo das
ATDs teóricas usando um modelo esférico, geodésico e ionosférico. Após a escolha do
modelo o algoritmo simula a distância entre todos os pontos de grade, tomados num intervalo
de dois por dois graus, sobre o globo até as respectivas localizações dos sensores. Neste
estudo, inicialmente é aplicado um erro de 20µ segundos que de acordo com o fabricante dos
sensores da rede ZEUS, está associado às medidas do GPS, forma geóide da Terra e as
variações da ionosfera. Esta janela temporal de 20µ segundos, posteriormente sofrerá uma
correção adequada, partindo dos dados coincidentes entre dois sistemas confiáveis e o
algoritmo desenvolvido.
O algoritmo é composto por sub-rotinas entre elas a rotina que calcula a distância entre
dois pontos sobre a superfície, com e sem os efeitos da ionosfera, além das sub-rotinas que
calculam a hora do nascer e pôr do sol, longitude e latitude de um dado ponto, altura da
ionosfera como função das horas e interações de minimização residual. Este algoritmo foi
elaborado com intenção de avaliar os erros médios de localização através das simulações de
interação conhecido como Modelo de Monte – Carlo.
3.3 MODELO DE MONTE-CARLO
Este modelo é baseado na simulação de variáveis aleatórias para resolução de
problemas. Entretanto a maior inconveniência deste método é o número de simulações
necessárias para reduzir o erro da estimativa da solução esperada, o que tende na prática, a
tornar o método muito lento. Contudo, o algoritmo de localização de descargas atmosféricas
respondeu de maneira eficiente os cálculos de interação.
Este termo foi empregado primeiramente pelos cientistas que desenvolveram a bomba
atômica em 1942, já a denominação de “método” provém da cidade de Monte Carlo, no
principado de Mônaco, famosa pelos seus cassinos e jogos de roleta, que são dispositivos que
produzem números aleatórios (HULL, 1997). Segundo Hull (1997), o método de Monte Carlo
tende a ser mais eficiente que outros métodos numéricos quando os processos envolvidos são
estocásticos, pois o tempo usado pela simulação de Monte Carlo cresce de forma praticamente
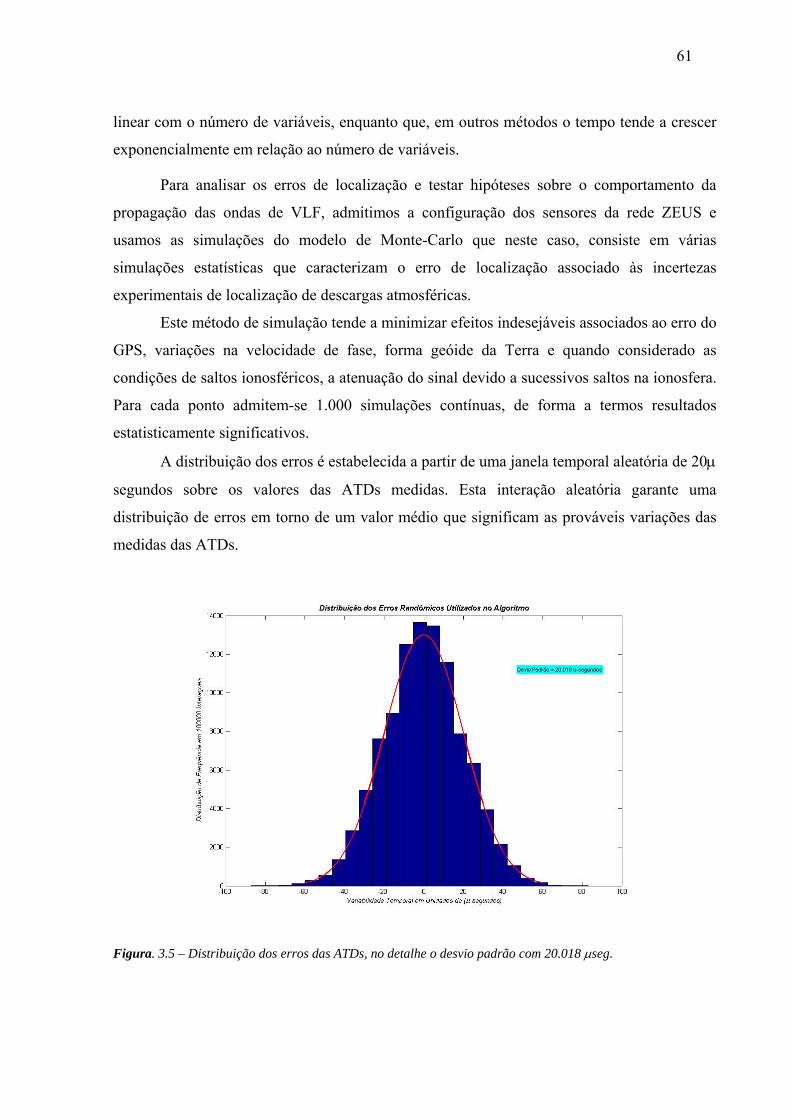
61
linear com o número de variáveis, enquanto que, em outros métodos o tempo tende a crescer
exponencialmente em relação ao número de variáveis.
Para analisar os erros de localização e testar hipóteses sobre o comportamento da
propagação das ondas de VLF, admitimos a configuração dos sensores da rede ZEUS e
usamos as simulações do modelo de Monte-Carlo que neste caso, consiste em várias
simulações estatísticas que caracterizam o erro de localização associado às incertezas
experimentais de localização de descargas atmosféricas.
Este método de simulação tende a minimizar efeitos indesejáveis associados ao erro do
GPS, variações na velocidade de fase, forma geóide da Terra e quando considerado as
condições de saltos ionosféricos, a atenuação do sinal devido a sucessivos saltos na ionosfera.
Para cada ponto admitem-se 1.000 simulações contínuas, de forma a termos resultados
estatisticamente significativos.
A distribuição dos erros é estabelecida a partir de uma janela temporal aleatória de 20µ
segundos sobre os valores das ATDs medidas. Esta interação aleatória garante uma
distribuição de erros em torno de um valor médio que significam as prováveis variações das
medidas das ATDs.
Figura. 3.5 – Distribuição dos erros das ATDs, no detalhe o desvio padrão com 20.018 µseg.
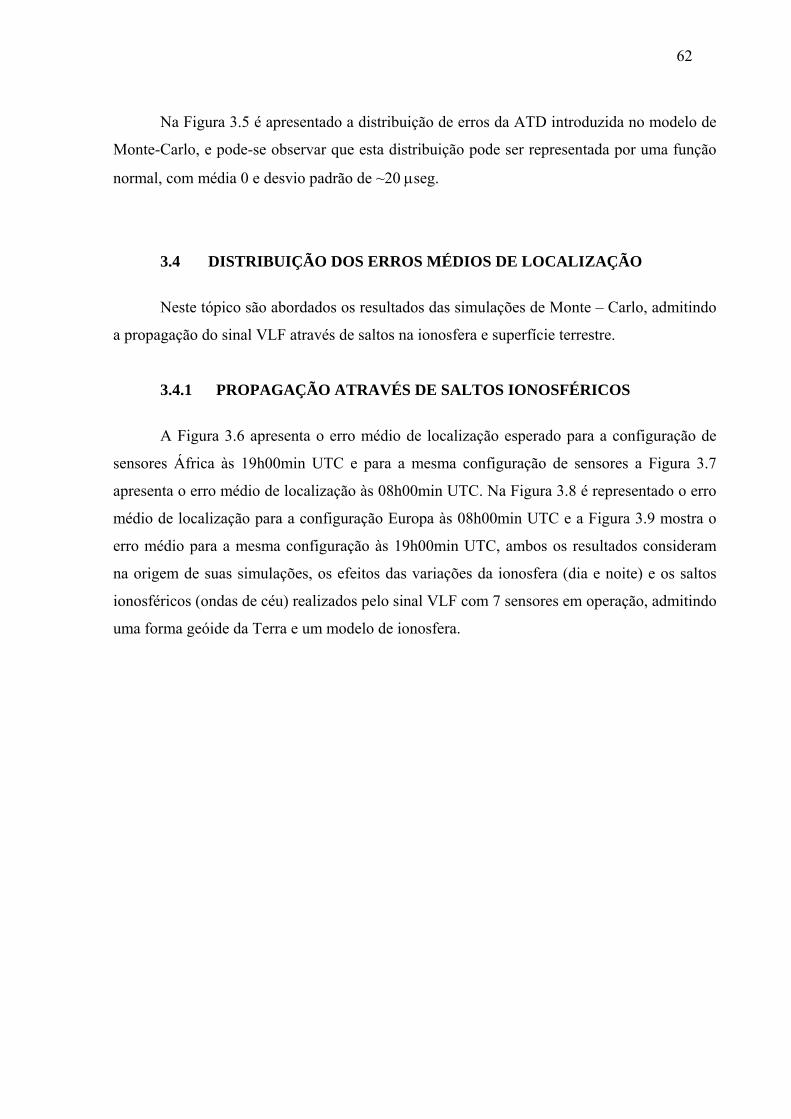
62
Na Figura 3.5 é apresentado a distribuição de erros da ATD introduzida no modelo de
Monte-Carlo, e pode-se observar que esta distribuição pode ser representada por uma função
normal, com média 0 e desvio padrão de ~20 µseg.
3.4 DISTRIBUIÇÃO DOS ERROS MÉDIOS DE LOCALIZAÇÃO
Neste tópico são abordados os resultados das simulações de Monte – Carlo, admitindo
a propagação do sinal VLF através de saltos na ionosfera e superfície terrestre.
3.4.1 PROPAGAÇÃO ATRAVÉS DE SALTOS IONOSFÉRICOS
A Figura 3.6 apresenta o erro médio de localização esperado para a configuração de
sensores África às 19h00min UTC e para a mesma configuração de sensores a Figura 3.7
apresenta o erro médio de localização às 08h00min UTC. Na Figura 3.8 é representado o erro
médio de localização para a configuração Europa às 08h00min UTC e a Figura 3.9 mostra o
erro médio para a mesma configuração às 19h00min UTC, ambos os resultados consideram
na origem de suas simulações, os efeitos das variações da ionosfera (dia e noite) e os saltos
ionosféricos (ondas de céu) realizados pelo sinal VLF com 7 sensores em operação, admitindo
uma forma geóide da Terra e um modelo de ionosfera.
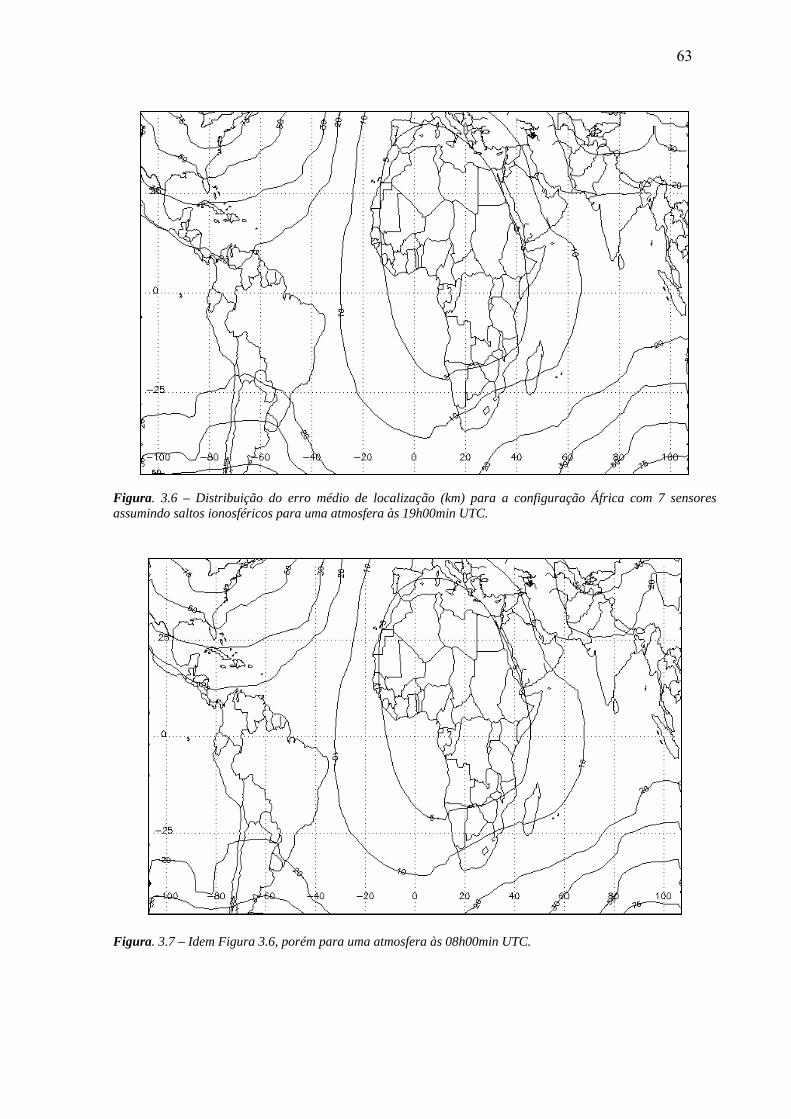
63
Figura. 3.6 – Distribuição do erro médio de localização (km) para a configuração África com 7 sensores assumindo saltos ionosféricos para uma atmosfera às 19h00min UTC.
Figura. 3.7 – Idem Figura 3.6, porém para uma atmosfera às 08h00min UTC.
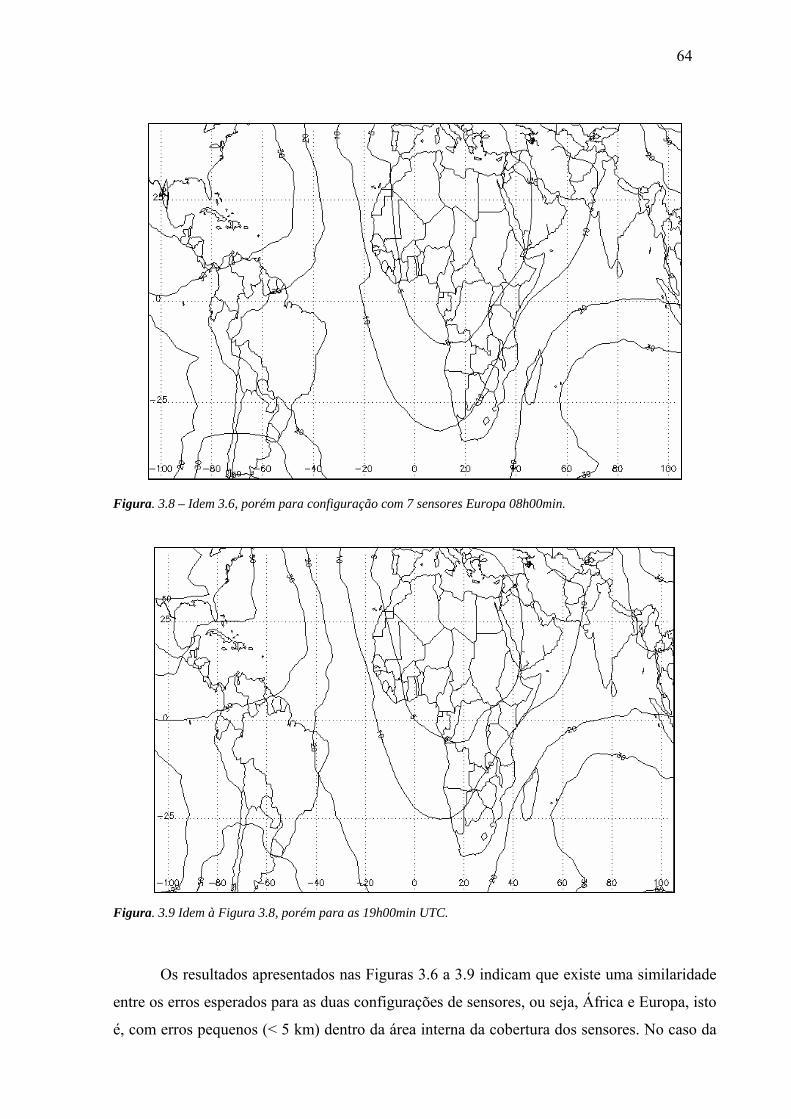
64
Figura. 3.8 – Idem 3.6, porém para configuração com 7 sensores Europa 08h00min.
Figura. 3.9 Idem à Figura 3.8, porém para as 19h00min UTC.
Os resultados apresentados nas Figuras 3.6 a 3.9 indicam que existe uma similaridade
entre os erros esperados para as duas configurações de sensores, ou seja, África e Europa, isto
é, com erros pequenos (< 5 km) dentro da área interna da cobertura dos sensores. No caso da
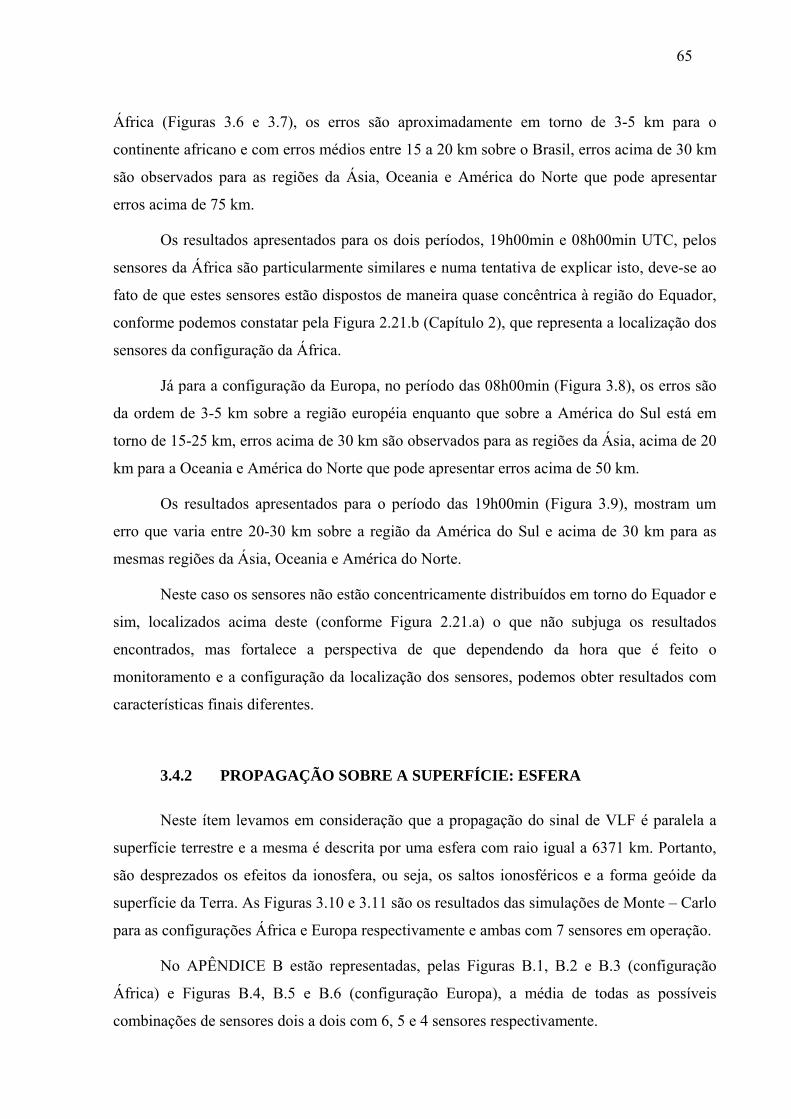
65
África (Figuras 3.6 e 3.7), os erros são aproximadamente em torno de 3-5 km para o
continente africano e com erros médios entre 15 a 20 km sobre o Brasil, erros acima de 30 km
são observados para as regiões da Ásia, Oceania e América do Norte que pode apresentar
erros acima de 75 km.
Os resultados apresentados para os dois períodos, 19h00min e 08h00min UTC, pelos
sensores da África são particularmente similares e numa tentativa de explicar isto, deve-se ao
fato de que estes sensores estão dispostos de maneira quase concêntrica à região do Equador,
conforme podemos constatar pela Figura 2.21.b (Capítulo 2), que representa a localização dos
sensores da configuração da África.
Já para a configuração da Europa, no período das 08h00min (Figura 3.8), os erros são
da ordem de 3-5 km sobre a região européia enquanto que sobre a América do Sul está em
torno de 15-25 km, erros acima de 30 km são observados para as regiões da Ásia, acima de 20
km para a Oceania e América do Norte que pode apresentar erros acima de 50 km.
Os resultados apresentados para o período das 19h00min (Figura 3.9), mostram um
erro que varia entre 20-30 km sobre a região da América do Sul e acima de 30 km para as
mesmas regiões da Ásia, Oceania e América do Norte.
Neste caso os sensores não estão concentricamente distribuídos em torno do Equador e
sim, localizados acima deste (conforme Figura 2.21.a) o que não subjuga os resultados
encontrados, mas fortalece a perspectiva de que dependendo da hora que é feito o
monitoramento e a configuração da localização dos sensores, podemos obter resultados com
características finais diferentes.
3.4.2 PROPAGAÇÃO SOBRE A SUPERFÍCIE: ESFERA
Neste ítem levamos em consideração que a propagação do sinal de VLF é paralela a
superfície terrestre e a mesma é descrita por uma esfera com raio igual a 6371 km. Portanto,
são desprezados os efeitos da ionosfera, ou seja, os saltos ionosféricos e a forma geóide da
superfície da Terra. As Figuras 3.10 e 3.11 são os resultados das simulações de Monte – Carlo
para as configurações África e Europa respectivamente e ambas com 7 sensores em operação.
No APÊNDICE B estão representadas, pelas Figuras B.1, B.2 e B.3 (configuração
África) e Figuras B.4, B.5 e B.6 (configuração Europa), a média de todas as possíveis
combinações de sensores dois a dois com 6, 5 e 4 sensores respectivamente.
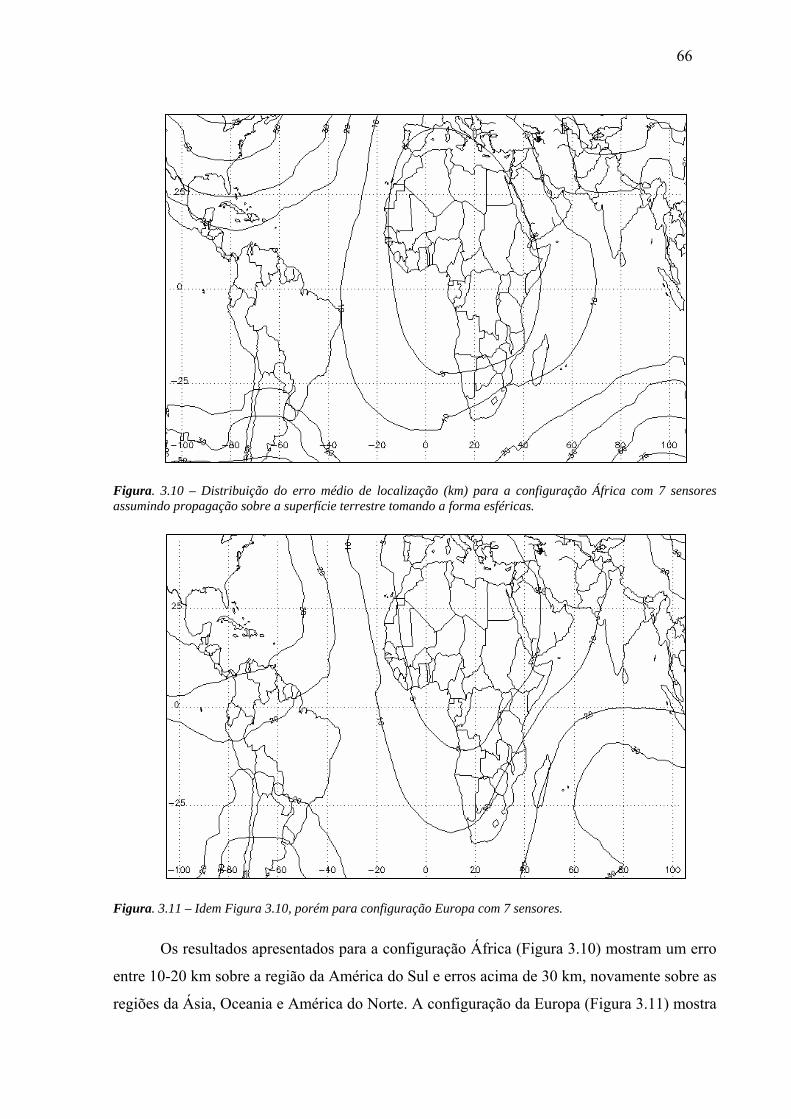
66
Figura. 3.10 – Distribuição do erro médio de localização (km) para a configuração África com 7 sensores assumindo propagação sobre a superfície terrestre tomando a forma esféricas.
Figura. 3.11 – Idem Figura 3.10, porém para configuração Europa com 7 sensores.
Os resultados apresentados para a configuração África (Figura 3.10) mostram um erro
entre 10-20 km sobre a região da América do Sul e erros acima de 30 km, novamente sobre as
regiões da Ásia, Oceania e América do Norte. A configuração da Europa (Figura 3.11) mostra
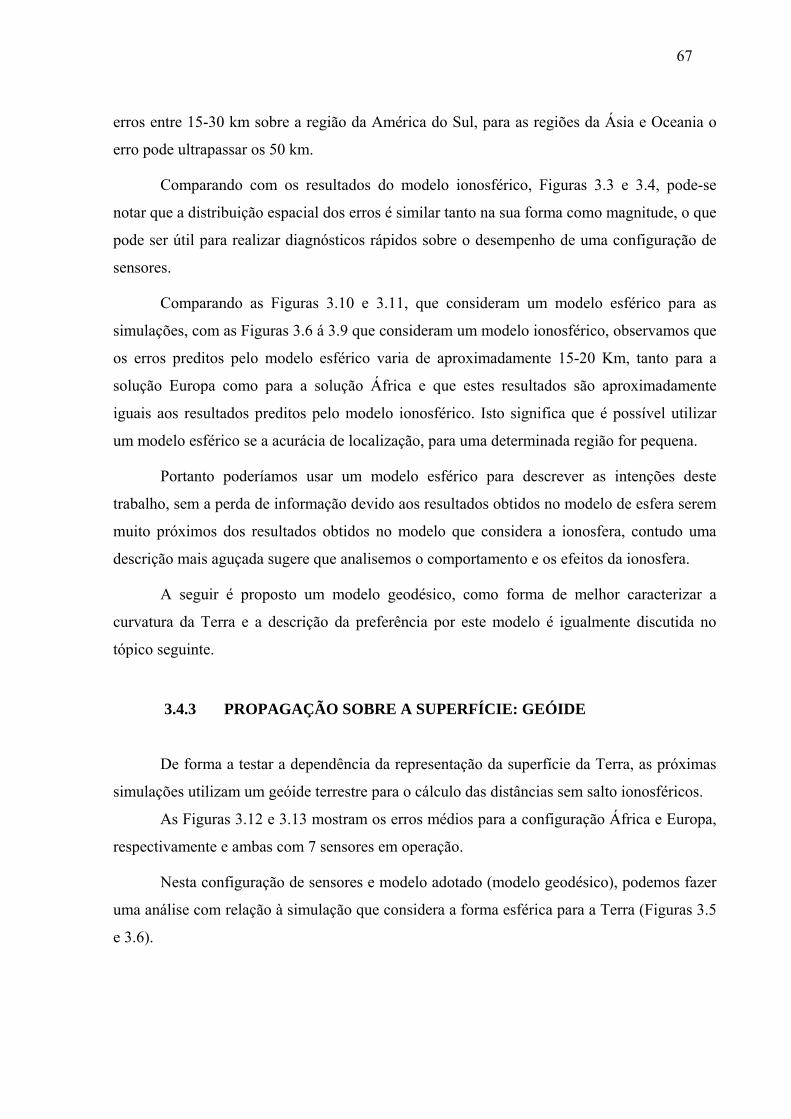
67
erros entre 15-30 km sobre a região da América do Sul, para as regiões da Ásia e Oceania o
erro pode ultrapassar os 50 km.
Comparando com os resultados do modelo ionosférico, Figuras 3.3 e 3.4, pode-se
notar que a distribuição espacial dos erros é similar tanto na sua forma como magnitude, o que
pode ser útil para realizar diagnósticos rápidos sobre o desempenho de uma configuração de
sensores.
Comparando as Figuras 3.10 e 3.11, que consideram um modelo esférico para as
simulações, com as Figuras 3.6 á 3.9 que consideram um modelo ionosférico, observamos que
os erros preditos pelo modelo esférico varia de aproximadamente 15-20 Km, tanto para a
solução Europa como para a solução África e que estes resultados são aproximadamente
iguais aos resultados preditos pelo modelo ionosférico. Isto significa que é possível utilizar
um modelo esférico se a acurácia de localização, para uma determinada região for pequena.
Portanto poderíamos usar um modelo esférico para descrever as intenções deste
trabalho, sem a perda de informação devido aos resultados obtidos no modelo de esfera serem
muito próximos dos resultados obtidos no modelo que considera a ionosfera, contudo uma
descrição mais aguçada sugere que analisemos o comportamento e os efeitos da ionosfera.
A seguir é proposto um modelo geodésico, como forma de melhor caracterizar a
curvatura da Terra e a descrição da preferência por este modelo é igualmente discutida no
tópico seguinte.
3.4.3 PROPAGAÇÃO SOBRE A SUPERFÍCIE: GEÓIDE
De forma a testar a dependência da representação da superfície da Terra, as próximas
simulações utilizam um geóide terrestre para o cálculo das distâncias sem salto ionosféricos.
As Figuras 3.12 e 3.13 mostram os erros médios para a configuração África e Europa,
respectivamente e ambas com 7 sensores em operação.
Nesta configuração de sensores e modelo adotado (modelo geodésico), podemos fazer
uma análise com relação à simulação que considera a forma esférica para a Terra (Figuras 3.5
e 3.6).
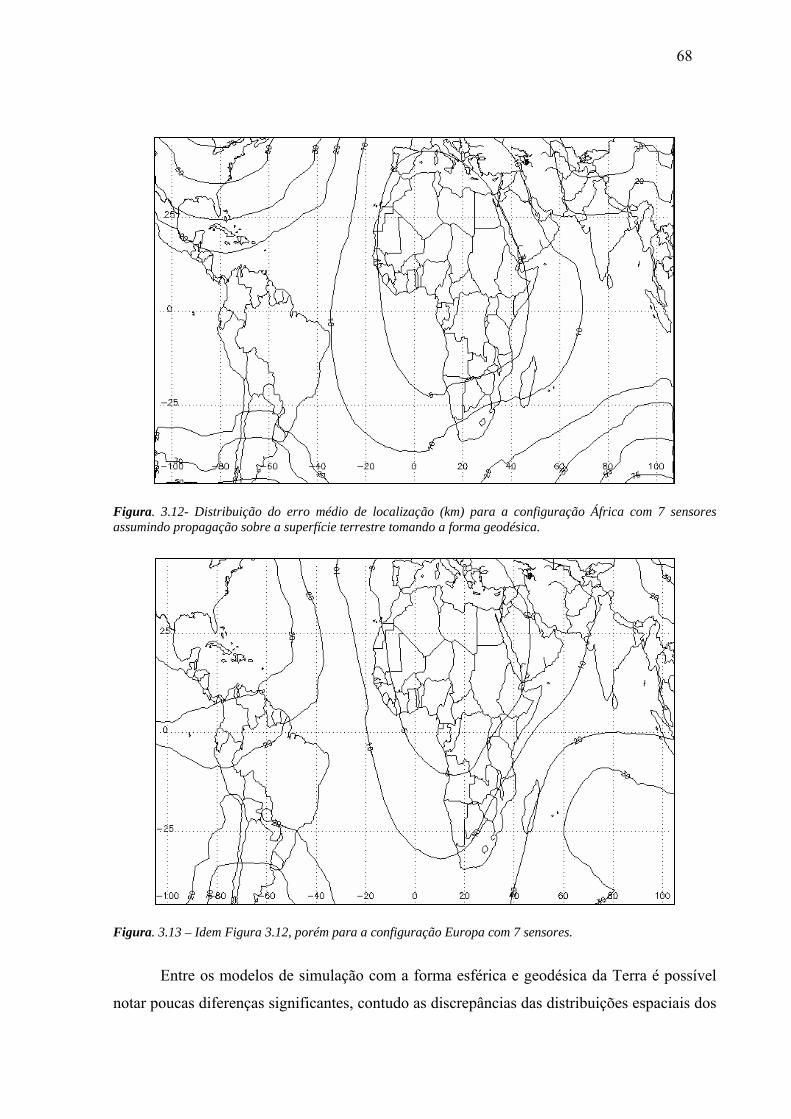
68
Figura. 3.12- Distribuição do erro médio de localização (km) para a configuração África com 7 sensores assumindo propagação sobre a superfície terrestre tomando a forma geodésica.
Figura. 3.13 – Idem Figura 3.12, porém para a configuração Europa com 7 sensores.
Entre os modelos de simulação com a forma esférica e geodésica da Terra é possível
notar poucas diferenças significantes, contudo as discrepâncias das distribuições espaciais dos
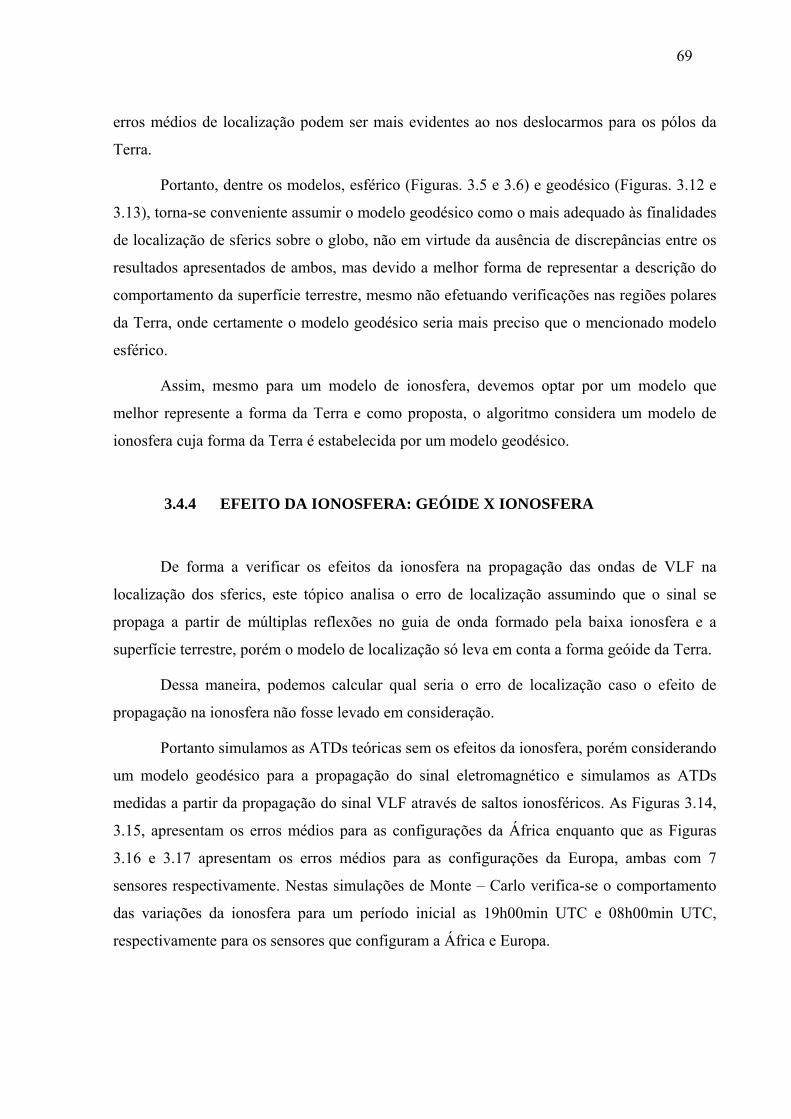
69
erros médios de localização podem ser mais evidentes ao nos deslocarmos para os pólos da
Terra.
Portanto, dentre os modelos, esférico (Figuras. 3.5 e 3.6) e geodésico (Figuras. 3.12 e
3.13), torna-se conveniente assumir o modelo geodésico como o mais adequado às finalidades
de localização de sferics sobre o globo, não em virtude da ausência de discrepâncias entre os
resultados apresentados de ambos, mas devido a melhor forma de representar a descrição do
comportamento da superfície terrestre, mesmo não efetuando verificações nas regiões polares
da Terra, onde certamente o modelo geodésico seria mais preciso que o mencionado modelo
esférico.
Assim, mesmo para um modelo de ionosfera, devemos optar por um modelo que
melhor represente a forma da Terra e como proposta, o algoritmo considera um modelo de
ionosfera cuja forma da Terra é estabelecida por um modelo geodésico.
3.4.4 EFEITO DA IONOSFERA: GEÓIDE X IONOSFERA
De forma a verificar os efeitos da ionosfera na propagação das ondas de VLF na
localização dos sferics, este tópico analisa o erro de localização assumindo que o sinal se
propaga a partir de múltiplas reflexões no guia de onda formado pela baixa ionosfera e a
superfície terrestre, porém o modelo de localização só leva em conta a forma geóide da Terra.
Dessa maneira, podemos calcular qual seria o erro de localização caso o efeito de
propagação na ionosfera não fosse levado em consideração.
Portanto simulamos as ATDs teóricas sem os efeitos da ionosfera, porém considerando
um modelo geodésico para a propagação do sinal eletromagnético e simulamos as ATDs
medidas a partir da propagação do sinal VLF através de saltos ionosféricos. As Figuras 3.14,
3.15, apresentam os erros médios para as configurações da África enquanto que as Figuras
3.16 e 3.17 apresentam os erros médios para as configurações da Europa, ambas com 7
sensores respectivamente. Nestas simulações de Monte – Carlo verifica-se o comportamento
das variações da ionosfera para um período inicial as 19h00min UTC e 08h00min UTC,
respectivamente para os sensores que configuram a África e Europa.
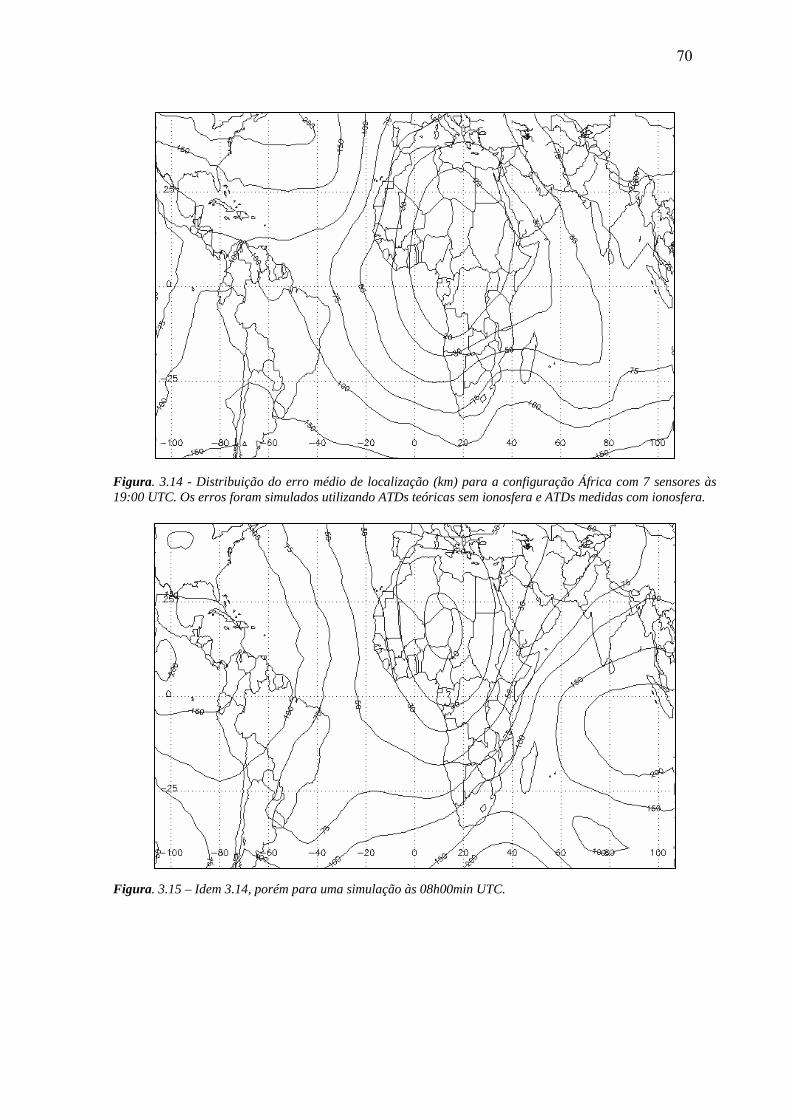
70
Figura. 3.14 - Distribuição do erro médio de localização (km) para a configuração África com 7 sensores às 19:00 UTC. Os erros foram simulados utilizando ATDs teóricas sem ionosfera e ATDs medidas com ionosfera.
Figura. 3.15 – Idem 3.14, porém para uma simulação às 08h00min UTC.
71
Figura.3.16 – Idem Figura 3.14, porém para a configuração Europa com 7 sensores.
Figura. 3.17 - Idem Figura 3.15, porém para a configuração Europa com 7sensores.
Nas Figuras 3.14 (configuração África às 19h00min UTC) e 3.15 (configuração África
às 08h00min UTC) podemos notar um aumento significativo dos erros médios quando
comparado com as simulações que consideram os saltos ionosféricos (Figuras 3.6 e 3.7,
respectivamente). Nas regiões circunscritas pelos sensores os erros variam entre 10-75 km, e
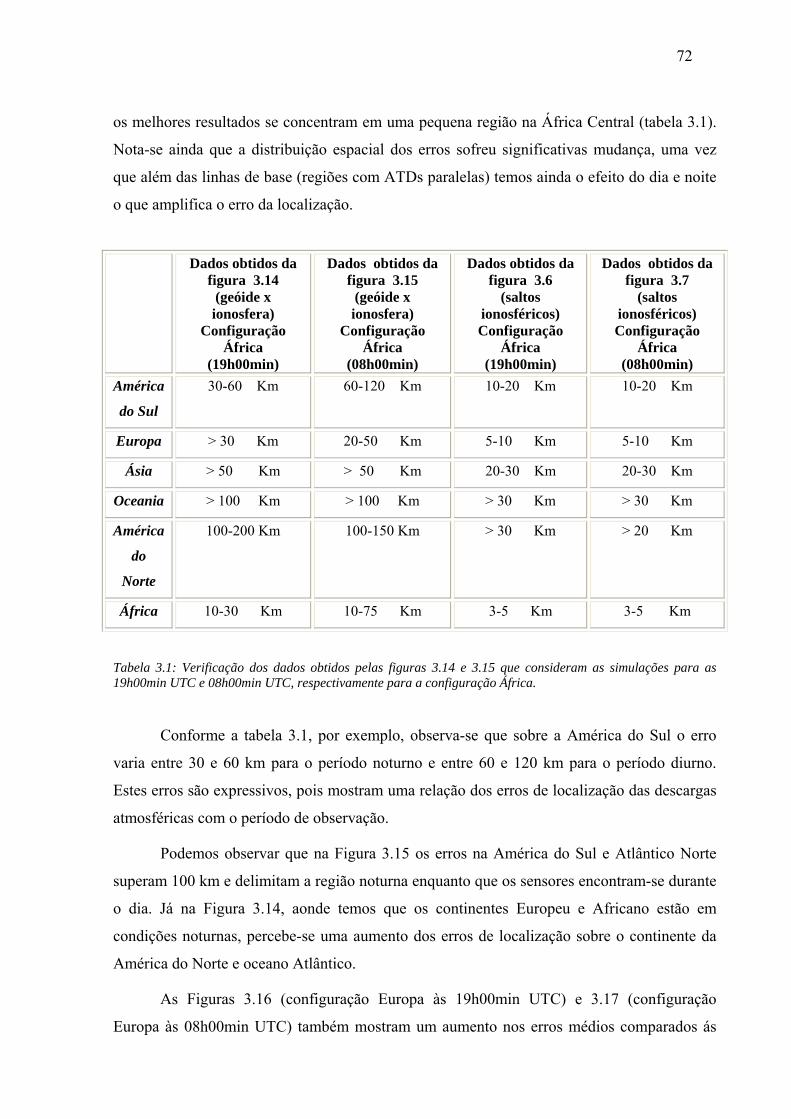
72
os melhores resultados se concentram em uma pequena região na África Central (tabela 3.1).
Nota-se ainda que a distribuição espacial dos erros sofreu significativas mudança, uma vez
que além das linhas de base (regiões com ATDs paralelas) temos ainda o efeito do dia e noite
o que amplifica o erro da localização.
Dados obtidos da figura 3.14
(geóide x ionosfera)
Configuração África
(19h00min)
Dados obtidos da figura 3.15
(geóide x ionosfera)
Configuração África
(08h00min)
Dados obtidos da figura 3.6
(saltos ionosféricos) Configuração
África (19h00min)
Dados obtidos da figura 3.7
(saltos ionosféricos) Configuração
África (08h00min)
América
do Sul
30-60 Km 60-120 Km 10-20 Km
10-20 Km
Europa > 30 Km 20-50 Km 5-10 Km 5-10 Km
Ásia > 50 Km > 50 Km 20-30 Km 20-30 Km
Oceania > 100 Km > 100 Km > 30 Km > 30 Km
América
do
Norte
100-200 Km 100-150 Km > 30 Km > 20 Km
África 10-30 Km 10-75 Km 3-5 Km 3-5 Km
Tabela 3.1: Verificação dos dados obtidos pelas figuras 3.14 e 3.15 que consideram as simulações para as 19h00min UTC e 08h00min UTC, respectivamente para a configuração África.
Conforme a tabela 3.1, por exemplo, observa-se que sobre a América do Sul o erro
varia entre 30 e 60 km para o período noturno e entre 60 e 120 km para o período diurno.
Estes erros são expressivos, pois mostram uma relação dos erros de localização das descargas
atmosféricas com o período de observação.
Podemos observar que na Figura 3.15 os erros na América do Sul e Atlântico Norte
superam 100 km e delimitam a região noturna enquanto que os sensores encontram-se durante
o dia. Já na Figura 3.14, aonde temos que os continentes Europeu e Africano estão em
condições noturnas, percebe-se uma aumento dos erros de localização sobre o continente da
América do Norte e oceano Atlântico.
As Figuras 3.16 (configuração Europa às 19h00min UTC) e 3.17 (configuração
Europa às 08h00min UTC) também mostram um aumento nos erros médios comparados ás
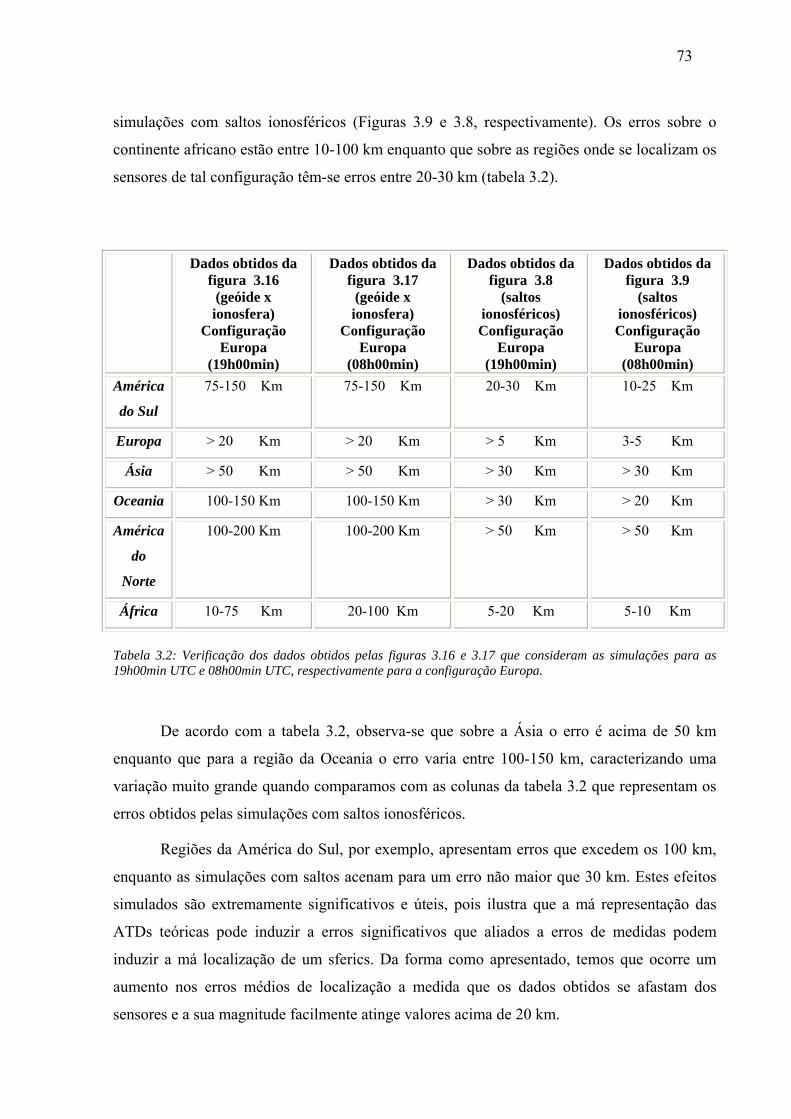
73
simulações com saltos ionosféricos (Figuras 3.9 e 3.8, respectivamente). Os erros sobre o
continente africano estão entre 10-100 km enquanto que sobre as regiões onde se localizam os
sensores de tal configuração têm-se erros entre 20-30 km (tabela 3.2).
Dados obtidos da figura 3.16
(geóide x ionosfera)
Configuração Europa
(19h00min)
Dados obtidos da figura 3.17
(geóide x ionosfera)
Configuração Europa
(08h00min)
Dados obtidos da figura 3.8
(saltos ionosféricos) Configuração
Europa (19h00min)
Dados obtidos da figura 3.9
(saltos ionosféricos) Configuração
Europa (08h00min)
América
do Sul
75-150 Km 75-150 Km 20-30 Km
10-25 Km
Europa > 20 Km > 20 Km > 5 Km 3-5 Km
Ásia > 50 Km > 50 Km > 30 Km > 30 Km
Oceania 100-150 Km 100-150 Km > 30 Km > 20 Km
América
do
Norte
100-200 Km 100-200 Km > 50 Km > 50 Km
África 10-75 Km 20-100 Km 5-20 Km 5-10 Km
Tabela 3.2: Verificação dos dados obtidos pelas figuras 3.16 e 3.17 que consideram as simulações para as 19h00min UTC e 08h00min UTC, respectivamente para a configuração Europa.
De acordo com a tabela 3.2, observa-se que sobre a Ásia o erro é acima de 50 km
enquanto que para a região da Oceania o erro varia entre 100-150 km, caracterizando uma
variação muito grande quando comparamos com as colunas da tabela 3.2 que representam os
erros obtidos pelas simulações com saltos ionosféricos.
Regiões da América do Sul, por exemplo, apresentam erros que excedem os 100 km,
enquanto as simulações com saltos acenam para um erro não maior que 30 km. Estes efeitos
simulados são extremamente significativos e úteis, pois ilustra que a má representação das
ATDs teóricas pode induzir a erros significativos que aliados a erros de medidas podem
induzir a má localização de um sferics. Da forma como apresentado, temos que ocorre um
aumento nos erros médios de localização a medida que os dados obtidos se afastam dos
sensores e a sua magnitude facilmente atinge valores acima de 20 km.
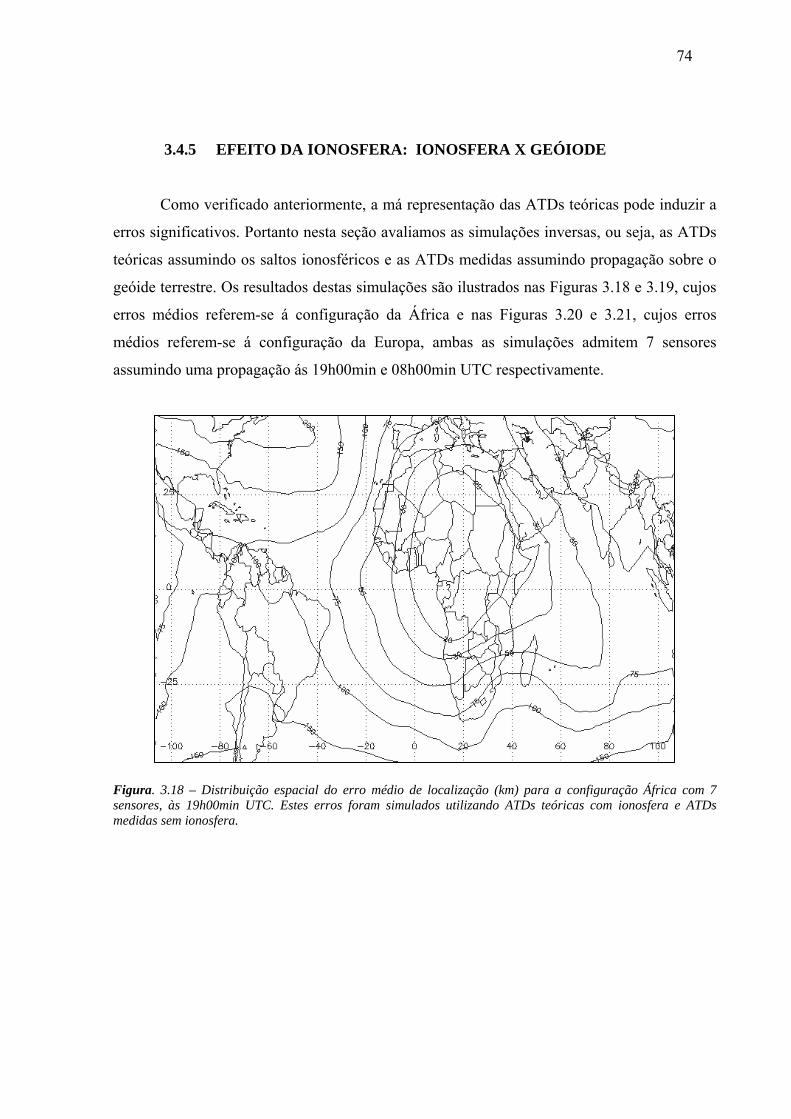
74
3.4.5 EFEITO DA IONOSFERA: IONOSFERA X GEÓIODE
Como verificado anteriormente, a má representação das ATDs teóricas pode induzir a
erros significativos. Portanto nesta seção avaliamos as simulações inversas, ou seja, as ATDs
teóricas assumindo os saltos ionosféricos e as ATDs medidas assumindo propagação sobre o
geóide terrestre. Os resultados destas simulações são ilustrados nas Figuras 3.18 e 3.19, cujos
erros médios referem-se á configuração da África e nas Figuras 3.20 e 3.21, cujos erros
médios referem-se á configuração da Europa, ambas as simulações admitem 7 sensores
assumindo uma propagação ás 19h00min e 08h00min UTC respectivamente.
Figura. 3.18 – Distribuição espacial do erro médio de localização (km) para a configuração África com 7 sensores, às 19h00min UTC. Estes erros foram simulados utilizando ATDs teóricas com ionosfera e ATDs medidas sem ionosfera.
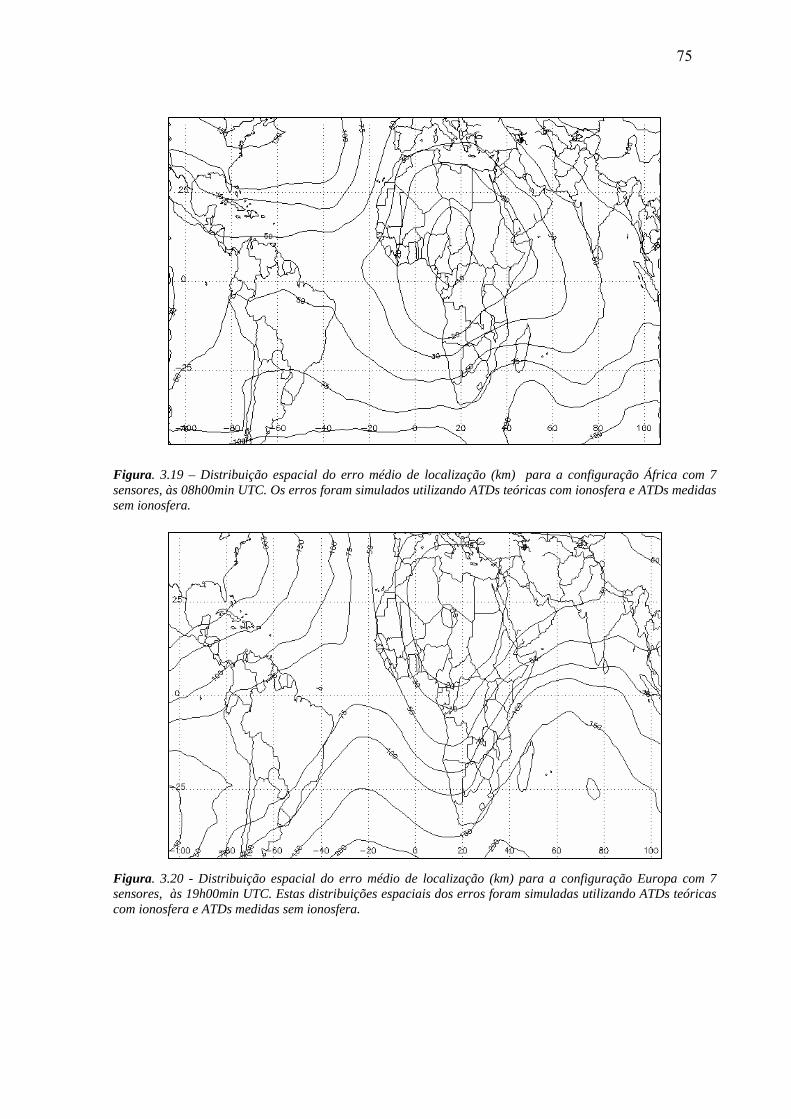
75
Figura. 3.19 – Distribuição espacial do erro médio de localização (km) para a configuração África com 7 sensores, às 08h00min UTC. Os erros foram simulados utilizando ATDs teóricas com ionosfera e ATDs medidas sem ionosfera. Figura. 3.20 - Distribuição espacial do erro médio de localização (km) para a configuração Europa com 7 sensores, às 19h00min UTC. Estas distribuições espaciais dos erros foram simuladas utilizando ATDs teóricas com ionosfera e ATDs medidas sem ionosfera.
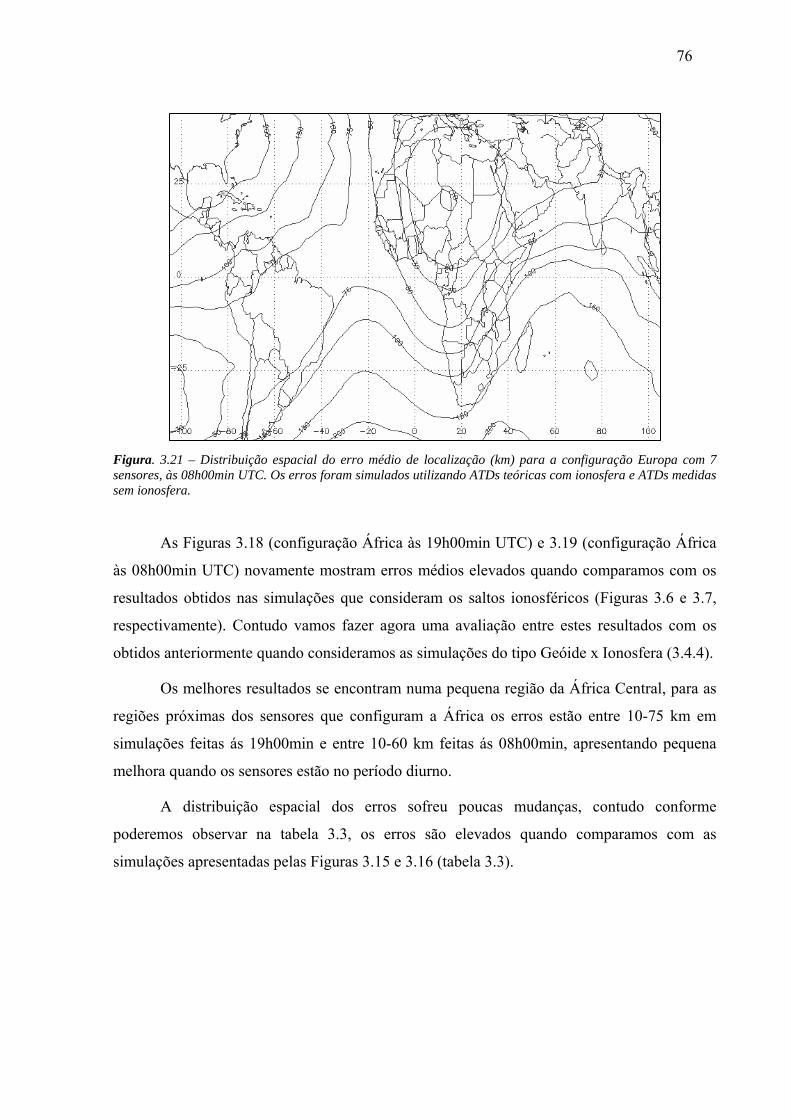
76
Figura. 3.21 – Distribuição espacial do erro médio de localização (km) para a configuração Europa com 7 sensores, às 08h00min UTC. Os erros foram simulados utilizando ATDs teóricas com ionosfera e ATDs medidas sem ionosfera.
As Figuras 3.18 (configuração África às 19h00min UTC) e 3.19 (configuração África
às 08h00min UTC) novamente mostram erros médios elevados quando comparamos com os
resultados obtidos nas simulações que consideram os saltos ionosféricos (Figuras 3.6 e 3.7,
respectivamente). Contudo vamos fazer agora uma avaliação entre estes resultados com os
obtidos anteriormente quando consideramos as simulações do tipo Geóide x Ionosfera (3.4.4).
Os melhores resultados se encontram numa pequena região da África Central, para as
regiões próximas dos sensores que configuram a África os erros estão entre 10-75 km em
simulações feitas ás 19h00min e entre 10-60 km feitas ás 08h00min, apresentando pequena
melhora quando os sensores estão no período diurno.
A distribuição espacial dos erros sofreu poucas mudanças, contudo conforme
poderemos observar na tabela 3.3, os erros são elevados quando comparamos com as
simulações apresentadas pelas Figuras 3.15 e 3.16 (tabela 3.3).
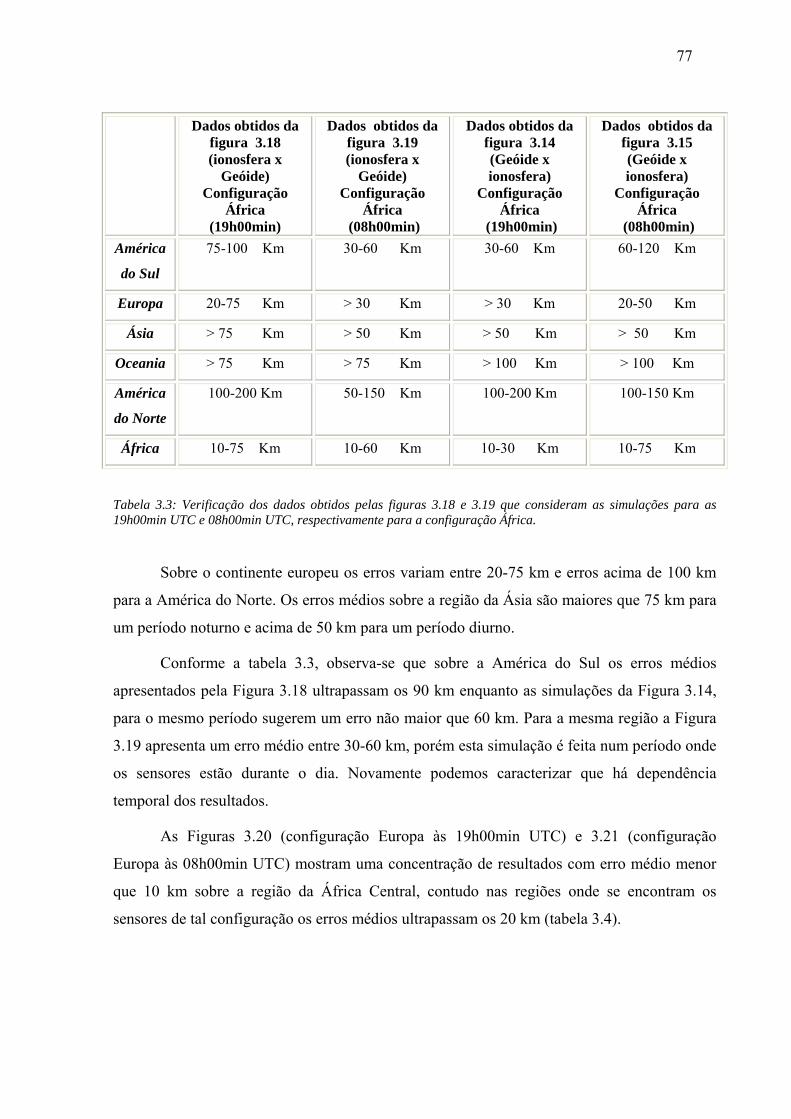
77
Dados obtidos da figura 3.18 (ionosfera x
Geóide) Configuração
África (19h00min)
Dados obtidos da figura 3.19 (ionosfera x
Geóide) Configuração
África (08h00min)
Dados obtidos da figura 3.14 (Geóide x ionosfera)
Configuração África
(19h00min)
Dados obtidos da figura 3.15 (Geóide x ionosfera)
Configuração África
(08h00min) América
do Sul
75-100 Km 30-60 Km 30-60 Km 60-120 Km
Europa 20-75 Km > 30 Km > 30 Km 20-50 Km
Ásia > 75 Km > 50 Km > 50 Km > 50 Km
Oceania > 75 Km > 75 Km > 100 Km > 100 Km
América
do Norte
100-200 Km 50-150 Km 100-200 Km 100-150 Km
África 10-75 Km 10-60 Km 10-30 Km 10-75 Km
Tabela 3.3: Verificação dos dados obtidos pelas figuras 3.18 e 3.19 que consideram as simulações para as 19h00min UTC e 08h00min UTC, respectivamente para a configuração África.
Sobre o continente europeu os erros variam entre 20-75 km e erros acima de 100 km
para a América do Norte. Os erros médios sobre a região da Ásia são maiores que 75 km para
um período noturno e acima de 50 km para um período diurno.
Conforme a tabela 3.3, observa-se que sobre a América do Sul os erros médios
apresentados pela Figura 3.18 ultrapassam os 90 km enquanto as simulações da Figura 3.14,
para o mesmo período sugerem um erro não maior que 60 km. Para a mesma região a Figura
3.19 apresenta um erro médio entre 30-60 km, porém esta simulação é feita num período onde
os sensores estão durante o dia. Novamente podemos caracterizar que há dependência
temporal dos resultados.
As Figuras 3.20 (configuração Europa às 19h00min UTC) e 3.21 (configuração
Europa às 08h00min UTC) mostram uma concentração de resultados com erro médio menor
que 10 km sobre a região da África Central, contudo nas regiões onde se encontram os
sensores de tal configuração os erros médios ultrapassam os 20 km (tabela 3.4).
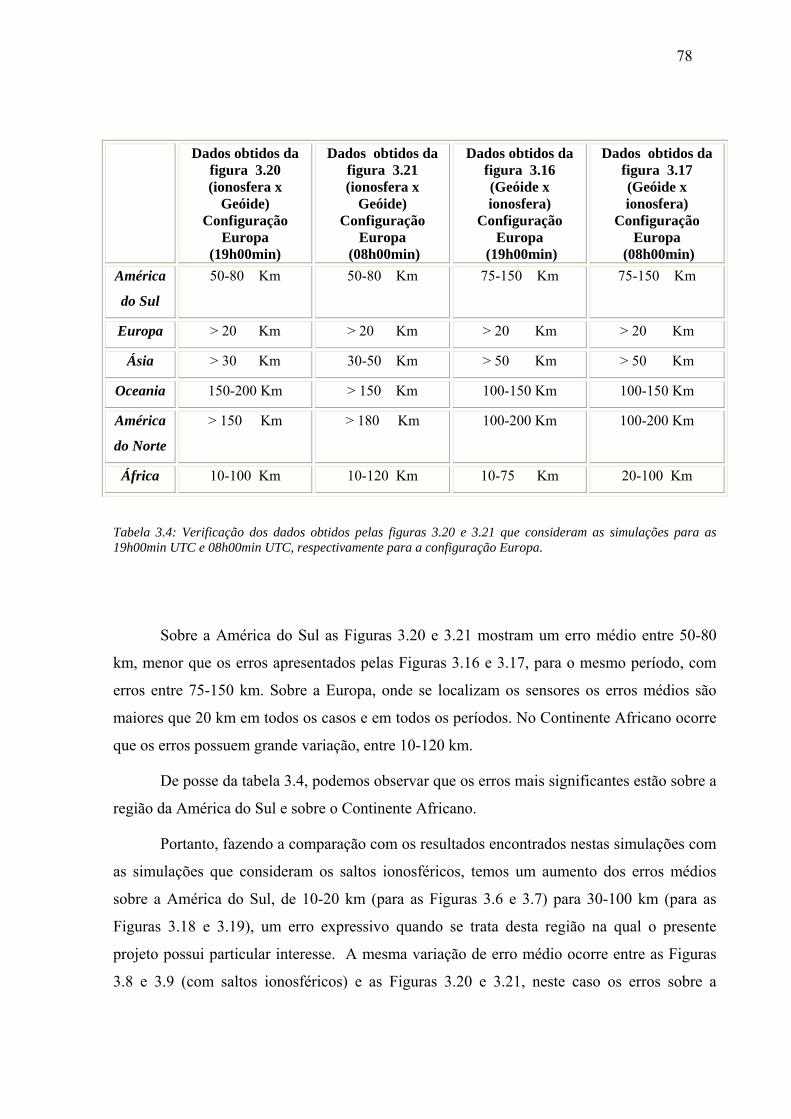
78
Dados obtidos da figura 3.20 (ionosfera x
Geóide) Configuração
Europa (19h00min)
Dados obtidos da figura 3.21 (ionosfera x
Geóide) Configuração
Europa (08h00min)
Dados obtidos da figura 3.16 (Geóide x ionosfera)
Configuração Europa
(19h00min)
Dados obtidos da figura 3.17 (Geóide x ionosfera)
Configuração Europa
(08h00min) América
do Sul
50-80 Km 50-80 Km 75-150 Km 75-150 Km
Europa > 20 Km > 20 Km > 20 Km > 20 Km
Ásia > 30 Km 30-50 Km > 50 Km > 50 Km
Oceania 150-200 Km > 150 Km 100-150 Km 100-150 Km
América
do Norte
> 150 Km > 180 Km 100-200 Km 100-200 Km
África 10-100 Km 10-120 Km 10-75 Km 20-100 Km
Tabela 3.4: Verificação dos dados obtidos pelas figuras 3.20 e 3.21 que consideram as simulações para as 19h00min UTC e 08h00min UTC, respectivamente para a configuração Europa.
Sobre a América do Sul as Figuras 3.20 e 3.21 mostram um erro médio entre 50-80
km, menor que os erros apresentados pelas Figuras 3.16 e 3.17, para o mesmo período, com
erros entre 75-150 km. Sobre a Europa, onde se localizam os sensores os erros médios são
maiores que 20 km em todos os casos e em todos os períodos. No Continente Africano ocorre
que os erros possuem grande variação, entre 10-120 km.
De posse da tabela 3.4, podemos observar que os erros mais significantes estão sobre a
região da América do Sul e sobre o Continente Africano.
Portanto, fazendo a comparação com os resultados encontrados nestas simulações com
as simulações que consideram os saltos ionosféricos, temos um aumento dos erros médios
sobre a América do Sul, de 10-20 km (para as Figuras 3.6 e 3.7) para 30-100 km (para as
Figuras 3.18 e 3.19), um erro expressivo quando se trata desta região na qual o presente
projeto possui particular interesse. A mesma variação de erro médio ocorre entre as Figuras
3.8 e 3.9 (com saltos ionosféricos) e as Figuras 3.20 e 3.21, neste caso os erros sobre a
79
América do Sul variam entre 50-80 km (Figuras 3.20 e 3.21) contra 10-30 km (Figuras 3.8 e
3.9).
Para estas simulações os erros encontrados são muito altos e podem representar grandes
variações nos resultados, admitindo um tipo de simulação ou outro. Portanto diante destas
variações é possível agora verificar o comportamento dos erros experimentais e os
procedimentos para tal análise descrita no capítulo seguinte admitem as simulações com
saltos ionosféricos cuja forma terrestre é um geóide, eliminando assim a persistência dos
eventuais erros significativos e que de forma única vamos desprezar.
80
CAPÍTULO 4
RESULTADOS E DISCUSSÕES
4.1 RESULTADOS E DISCUSSÕES
Este capítulo avalia o erro médio de localização experimental obtido através da
comparação entre os dados observados da rede ZEUS e RINDAT. Posteriormente, estes erros
experimentais são confrontados com as simulações teóricas descritas no capítulo anterior de
forma a quantificarmos os problemas encontrados na localização de sferics pelo sistema
ZEUS na região Sudeste do Brasil.
4.2 ERROS EXPERIMENTAIS
A análise dos erros experimentais é baseada na comparação entre as medidas
provenientes da rede ZEUS e RINDAT e o período escolhido (1 de Julho de 2004 à 31 de
Janeiro de 2005) se deve ao re-processamento dos dados da rede ZEUS que considera todos
os sensores da África e Europa. Como apresentado anteriormente, as duas redes de detecção
possuem tecnologias distintas de medição de descargas atmosféricas o que implica que apesar
de ambos medirem em princípio o mesmo evento, diferentes partes de um relâmpago serão
amostrados pelos os dois sistemas. No sistema ZEUS, por exemplo, medem-se os sferics que
em princípio estão associados às descargas atmosféricas NS e IN/NN (LEE, 1998;
MORALES, 2001) e se propagam a partir de múltiplas reflexões no guia de onda formado
pela ionosfera e a superfície terrestre. Por outro lado, a RINDAT mede basicamente “strokes”
provenientes de descargas atmosféricas do tipo NS que se propagam por ondas de superfície.
Dessa maneira, diferenças espaciais e temporais são esperadas em ambos os sistemas. A partir
81
da definição de um flash, a qual descreve o processo completo de um relâmpago, que pode ter
dimensões temporais de até 1 segundo e espaciais de metros até algumas dezenas de
quilômetros, podemos avaliar os erros de localização da rede ZEUS.
Sendo assim, para a determinação dos erros de localização da rede ZEUS, iremos
assumir que os strokes medidos pela RINDAT são a “verdade terrestre” e possuem erros de
localização entre 0.5-2 km (CUMMINS et. al., 1998; NACARRATO et. al., 2004). As
Figuras 4.1 e 4.2 apresentam a distribuição de descargas atmosféricas observadas pela
RINDAT e ZEUS respectivamente para o dia 10 de Dezembro de 2004 entre 19h45min e
20h00min UTC com um intervalo de tempo de 15 minutos.
Durante este período foram observados 833 strokes pela RINDAT enquanto que a
ZEUS observou 3158 sferics. Os resultados apresentados nas Figuras 4.1 e 4.2 ilustram o
típico erro de localização de sistemas de longo alcance tal como a rede ZEUS, ou seja,
posições alinhadas em uma direção. Basicamente tomando-se as regiões de maior
concentração de strokes da RINDAT pode-se perceber que existem sferics alongo de uma
grande área que pode ser descrita por elipses. Este efeito ilustrado na Figura 4.2 pode ser
interpretado como a região aonde as ATDs tornam-se paralelas.
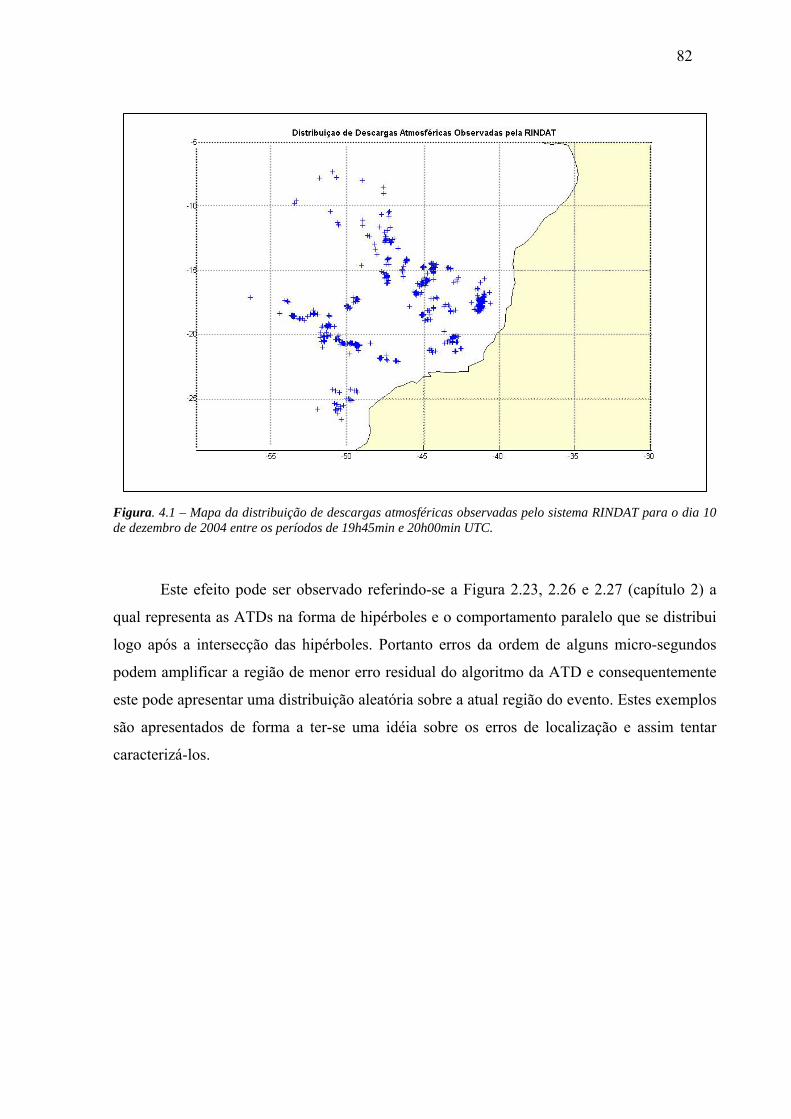
82
Figura. 4.1 – Mapa da distribuição de descargas atmosféricas observadas pelo sistema RINDAT para o dia 10 de dezembro de 2004 entre os períodos de 19h45min e 20h00min UTC.
Este efeito pode ser observado referindo-se a Figura 2.23, 2.26 e 2.27 (capítulo 2) a
qual representa as ATDs na forma de hipérboles e o comportamento paralelo que se distribui
logo após a intersecção das hipérboles. Portanto erros da ordem de alguns micro-segundos
podem amplificar a região de menor erro residual do algoritmo da ATD e consequentemente
este pode apresentar uma distribuição aleatória sobre a atual região do evento. Estes exemplos
são apresentados de forma a ter-se uma idéia sobre os erros de localização e assim tentar
caracterizá-los.

83
Figura. 4.2 – Mapa da distribuição de descargas atmosféricas observadas pelo sistema ZEUS para o dia 10 de dezembro de 2004 entre os períodos de 19h45min e 20h00min UTC. As elipses representam os erros característicos de posição aonde as ATDs se encontram paralelas.
Para determinar os erros de localização foi desenvolvido um algoritmo que busca por
medidas coincidentes da rede ZEUS e RINDAT assumindo uma janela temporal de 0.1 mili
segundo e 300 km de distância. A extensão para grandes distâncias se deve ao fato que as
simulações de Monte-Carlo indicam que os erros esperados podem ser superiores a 200 km
em algumas situações e também porque ainda não existe um estudo feito sobre esta região. A
comparação com os dados da rede RINDAT é restrita sobre a região sudeste do Brasil, pois é
a região onde os erros de localização são inferiores a 2 km e a eficiência de detecção de
flashes é entre 80-90% (NACARRATO et.al., 2004).
A partir da utilização deste critério de busca, foram identificadas 54.530 medidas
coincidentes entre a rede ZEUS e a RINDAT durante o período da análise deste estudo. A
Figura 4.3 apresenta um exemplo das medidas coincidentes entre a ZEUS e RINDAT para o
caso das Figuras 4.1 e 4.2. Neste exemplo podemos verificar as diferenças de localização
entre ambos os sistemas, sendo que no caso da rede ZEUS podemos notar que não existe uma
dependência de localização preferencial, mas sim uma aleatoriedade em torno dos locais
mensurados pela RINDAT. Este fato evidencia que os erros de localização podem ser
avaliados a partir de simulações teóricas que são baseadas em erros aleatórios no tempo. Caso
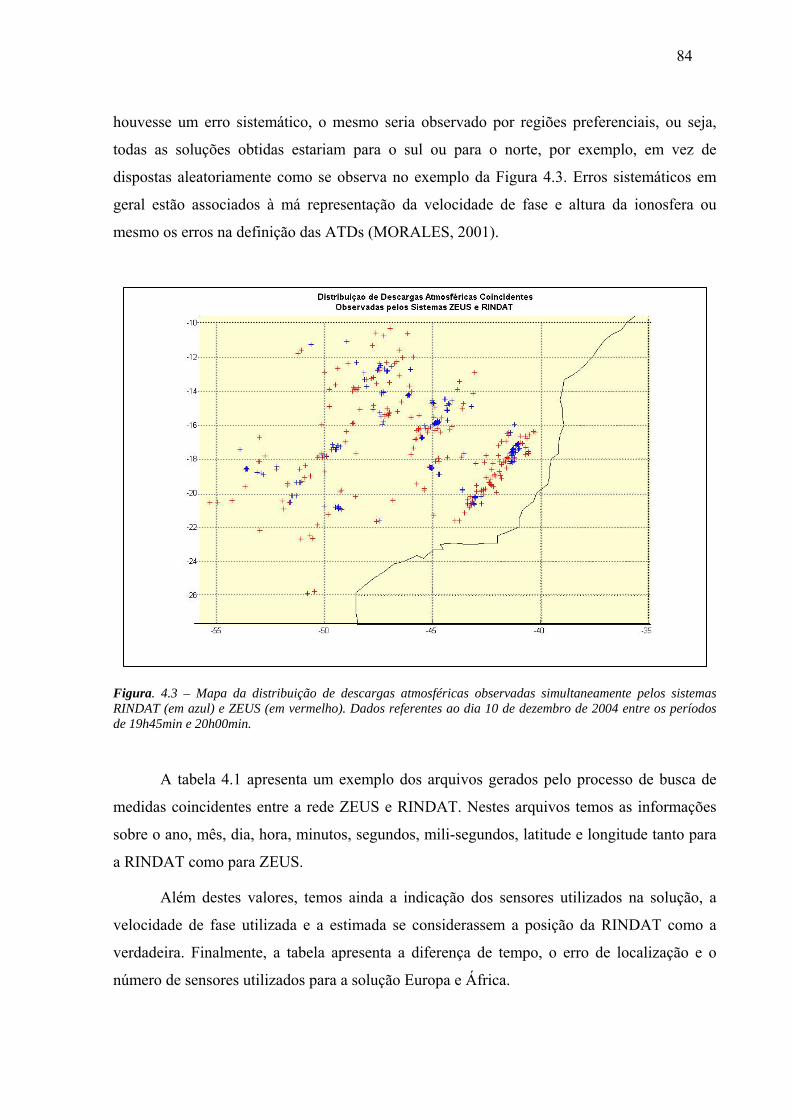
84
houvesse um erro sistemático, o mesmo seria observado por regiões preferenciais, ou seja,
todas as soluções obtidas estariam para o sul ou para o norte, por exemplo, em vez de
dispostas aleatoriamente como se observa no exemplo da Figura 4.3. Erros sistemáticos em
geral estão associados à má representação da velocidade de fase e altura da ionosfera ou
mesmo os erros na definição das ATDs (MORALES, 2001).
Figura. 4.3 – Mapa da distribuição de descargas atmosféricas observadas simultaneamente pelos sistemas RINDAT (em azul) e ZEUS (em vermelho). Dados referentes ao dia 10 de dezembro de 2004 entre os períodos de 19h45min e 20h00min.
A tabela 4.1 apresenta um exemplo dos arquivos gerados pelo processo de busca de
medidas coincidentes entre a rede ZEUS e RINDAT. Nestes arquivos temos as informações
sobre o ano, mês, dia, hora, minutos, segundos, mili-segundos, latitude e longitude tanto para
a RINDAT como para ZEUS.
Além destes valores, temos ainda a indicação dos sensores utilizados na solução, a
velocidade de fase utilizada e a estimada se considerassem a posição da RINDAT como a
verdadeira. Finalmente, a tabela apresenta a diferença de tempo, o erro de localização e o
número de sensores utilizados para a solução Europa e África.
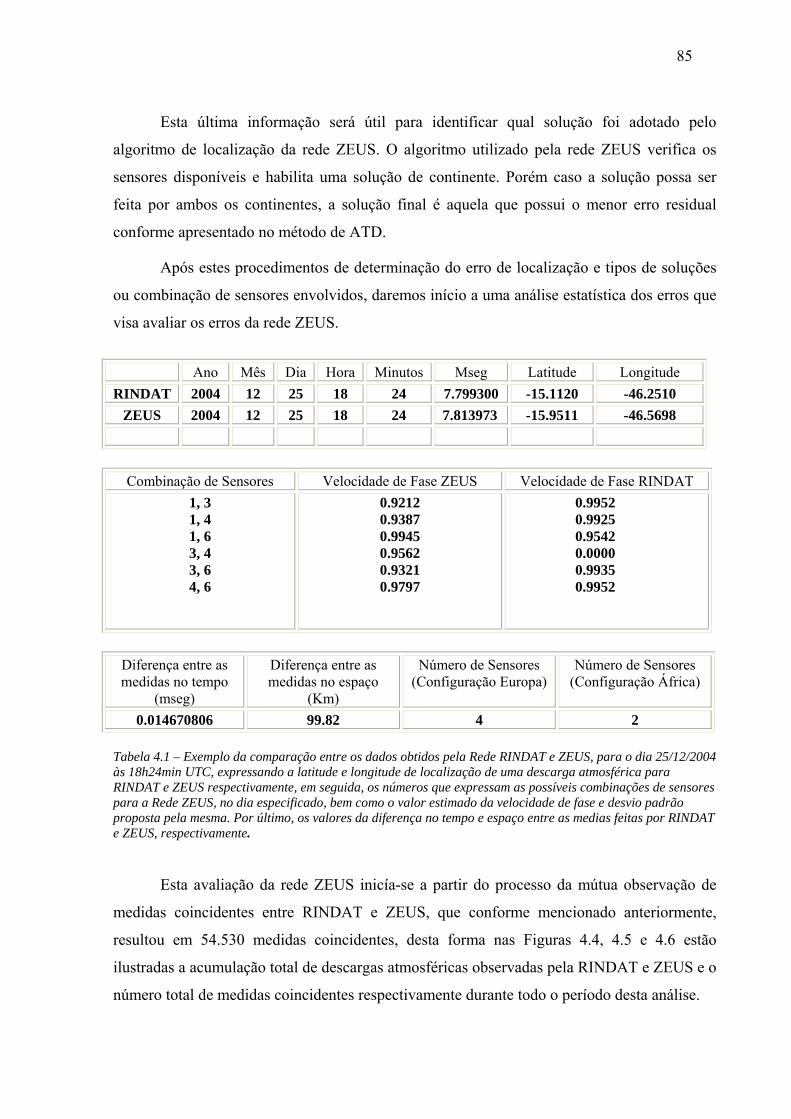
85
Esta última informação será útil para identificar qual solução foi adotado pelo
algoritmo de localização da rede ZEUS. O algoritmo utilizado pela rede ZEUS verifica os
sensores disponíveis e habilita uma solução de continente. Porém caso a solução possa ser
feita por ambos os continentes, a solução final é aquela que possui o menor erro residual
conforme apresentado no método de ATD.
Após estes procedimentos de determinação do erro de localização e tipos de soluções
ou combinação de sensores envolvidos, daremos início a uma análise estatística dos erros que
visa avaliar os erros da rede ZEUS.
Ano Mês Dia Hora Minutos Mseg Latitude Longitude
RINDAT 2004 12 25 18 24 7.799300 -15.1120 -46.2510 ZEUS 2004 12 25 18 24 7.813973 -15.9511 -46.5698
Combinação de Sensores Velocidade de Fase ZEUS Velocidade de Fase RINDAT 1, 3 1, 4 1, 6 3, 4 3, 6 4, 6
0.9212 0.9387 0.9945 0.9562 0.9321 0.9797
0.9952 0.9925 0.9542 0.0000 0.9935 0.9952
Diferença entre as medidas no tempo
(mseg)
Diferença entre as medidas no espaço
(Km)
Número de Sensores (Configuração Europa)
Número de Sensores (Configuração África)
0.014670806 99.82 4 2
Tabela 4.1 – Exemplo da comparação entre os dados obtidos pela Rede RINDAT e ZEUS, para o dia 25/12/2004 às 18h24min UTC, expressando a latitude e longitude de localização de uma descarga atmosférica para RINDAT e ZEUS respectivamente, em seguida, os números que expressam as possíveis combinações de sensores para a Rede ZEUS, no dia especificado, bem como o valor estimado da velocidade de fase e desvio padrão proposta pela mesma. Por último, os valores da diferença no tempo e espaço entre as medias feitas por RINDAT e ZEUS, respectivamente. Esta avaliação da rede ZEUS inicía-se a partir do processo da mútua observação de
medidas coincidentes entre RINDAT e ZEUS, que conforme mencionado anteriormente,
resultou em 54.530 medidas coincidentes, desta forma nas Figuras 4.4, 4.5 e 4.6 estão
ilustradas a acumulação total de descargas atmosféricas observadas pela RINDAT e ZEUS e o
número total de medidas coincidentes respectivamente durante todo o período desta análise.
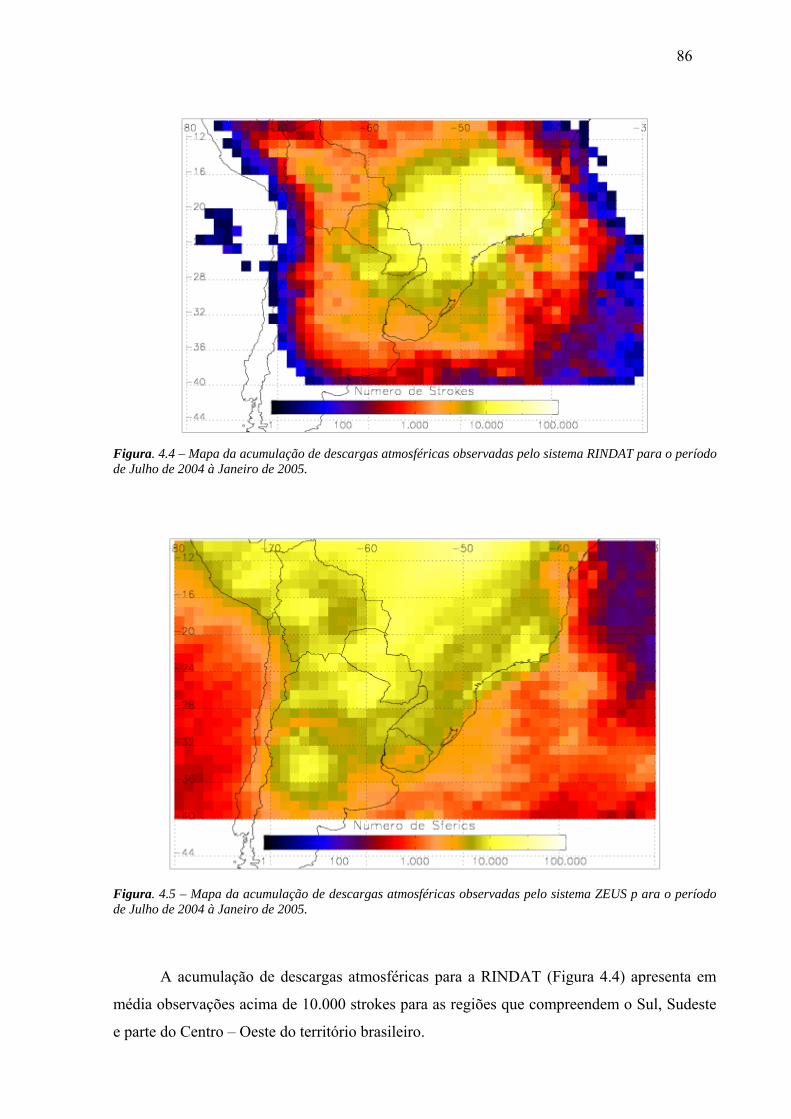
86
Figura. 4.4 – Mapa da acumulação de descargas atmosféricas observadas pelo sistema RINDAT para o período de Julho de 2004 à Janeiro de 2005.
Figura. 4.5 – Mapa da acumulação de descargas atmosféricas observadas pelo sistema ZEUS p ara o período de Julho de 2004 à Janeiro de 2005.
A acumulação de descargas atmosféricas para a RINDAT (Figura 4.4) apresenta em
média observações acima de 10.000 strokes para as regiões que compreendem o Sul, Sudeste
e parte do Centro – Oeste do território brasileiro.
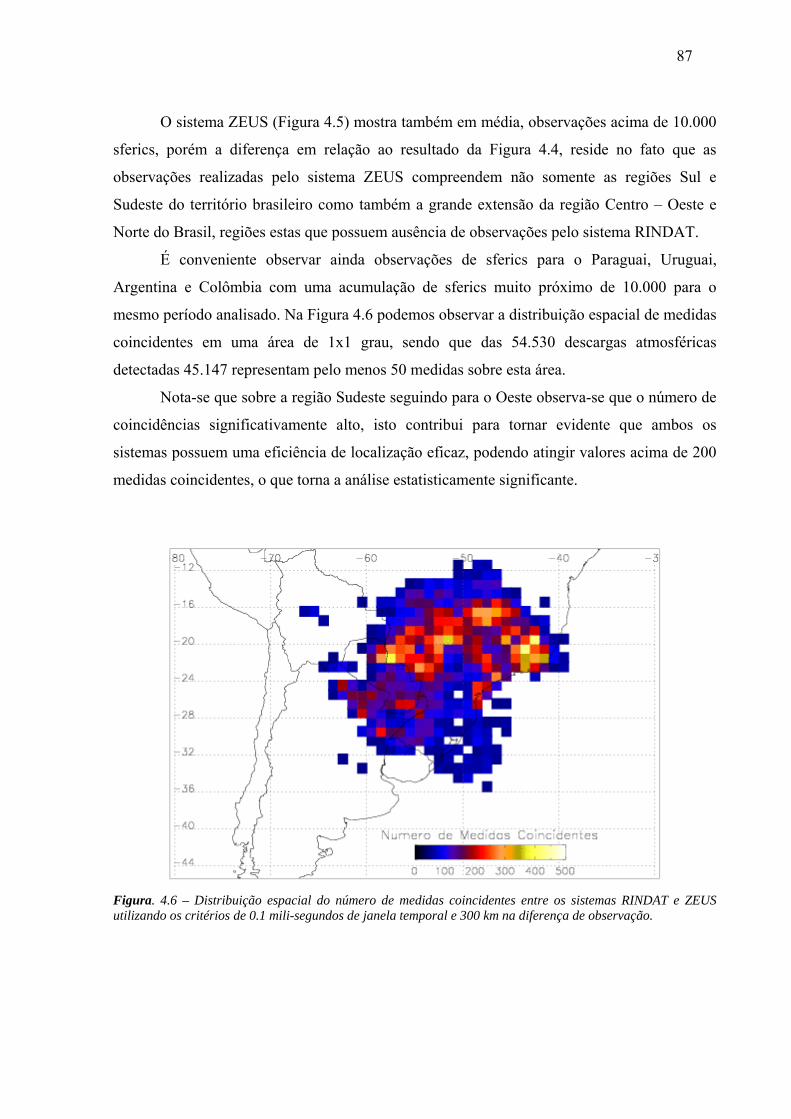
87
O sistema ZEUS (Figura 4.5) mostra também em média, observações acima de 10.000
sferics, porém a diferença em relação ao resultado da Figura 4.4, reside no fato que as
observações realizadas pelo sistema ZEUS compreendem não somente as regiões Sul e
Sudeste do território brasileiro como também a grande extensão da região Centro – Oeste e
Norte do Brasil, regiões estas que possuem ausência de observações pelo sistema RINDAT.
É conveniente observar ainda observações de sferics para o Paraguai, Uruguai,
Argentina e Colômbia com uma acumulação de sferics muito próximo de 10.000 para o
mesmo período analisado. Na Figura 4.6 podemos observar a distribuição espacial de medidas
coincidentes em uma área de 1x1 grau, sendo que das 54.530 descargas atmosféricas
detectadas 45.147 representam pelo menos 50 medidas sobre esta área.
Nota-se que sobre a região Sudeste seguindo para o Oeste observa-se que o número de
coincidências significativamente alto, isto contribui para tornar evidente que ambos os
sistemas possuem uma eficiência de localização eficaz, podendo atingir valores acima de 200
medidas coincidentes, o que torna a análise estatisticamente significante.
Figura. 4.6 – Distribuição espacial do número de medidas coincidentes entre os sistemas RINDAT e ZEUS utilizando os critérios de 0.1 mili-segundos de janela temporal e 300 km na diferença de observação.
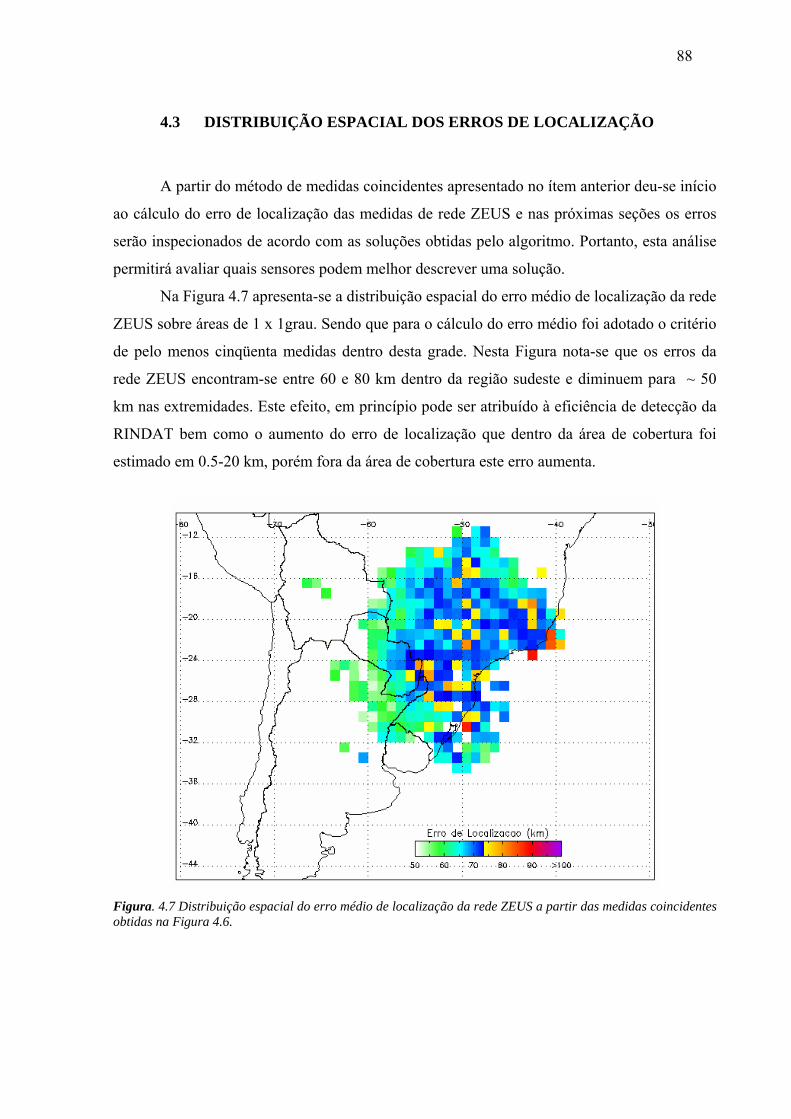
88
4.3 DISTRIBUIÇÃO ESPACIAL DOS ERROS DE LOCALIZAÇÃO
A partir do método de medidas coincidentes apresentado no ítem anterior deu-se início
ao cálculo do erro de localização das medidas de rede ZEUS e nas próximas seções os erros
serão inspecionados de acordo com as soluções obtidas pelo algoritmo. Portanto, esta análise
permitirá avaliar quais sensores podem melhor descrever uma solução.
Na Figura 4.7 apresenta-se a distribuição espacial do erro médio de localização da rede
ZEUS sobre áreas de 1 x 1grau. Sendo que para o cálculo do erro médio foi adotado o critério
de pelo menos cinqüenta medidas dentro desta grade. Nesta Figura nota-se que os erros da
rede ZEUS encontram-se entre 60 e 80 km dentro da região sudeste e diminuem para ~ 50
km nas extremidades. Este efeito, em princípio pode ser atribuído à eficiência de detecção da
RINDAT bem como o aumento do erro de localização que dentro da área de cobertura foi
estimado em 0.5-20 km, porém fora da área de cobertura este erro aumenta.
Figura. 4.7 Distribuição espacial do erro médio de localização da rede ZEUS a partir das medidas coincidentes obtidas na Figura 4.6.
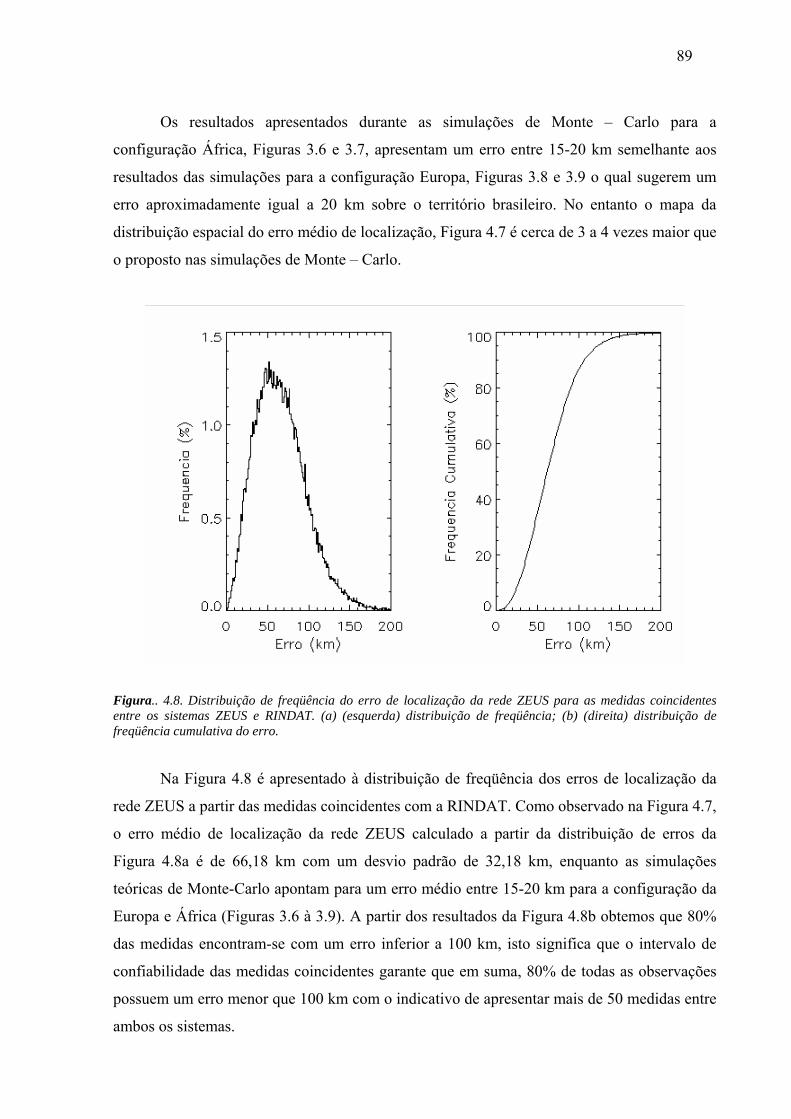
89
Os resultados apresentados durante as simulações de Monte – Carlo para a
configuração África, Figuras 3.6 e 3.7, apresentam um erro entre 15-20 km semelhante aos
resultados das simulações para a configuração Europa, Figuras 3.8 e 3.9 o qual sugerem um
erro aproximadamente igual a 20 km sobre o território brasileiro. No entanto o mapa da
distribuição espacial do erro médio de localização, Figura 4.7 é cerca de 3 a 4 vezes maior que
o proposto nas simulações de Monte – Carlo.
Figura.. 4.8. Distribuição de freqüência do erro de localização da rede ZEUS para as medidas coincidentes entre os sistemas ZEUS e RINDAT. (a) (esquerda) distribuição de freqüência; (b) (direita) distribuição de freqüência cumulativa do erro. Na Figura 4.8 é apresentado à distribuição de freqüência dos erros de localização da
rede ZEUS a partir das medidas coincidentes com a RINDAT. Como observado na Figura 4.7,
o erro médio de localização da rede ZEUS calculado a partir da distribuição de erros da
Figura 4.8a é de 66,18 km com um desvio padrão de 32,18 km, enquanto as simulações
teóricas de Monte-Carlo apontam para um erro médio entre 15-20 km para a configuração da
Europa e África (Figuras 3.6 à 3.9). A partir dos resultados da Figura 4.8b obtemos que 80%
das medidas encontram-se com um erro inferior a 100 km, isto significa que o intervalo de
confiabilidade das medidas coincidentes garante que em suma, 80% de todas as observações
possuem um erro menor que 100 km com o indicativo de apresentar mais de 50 medidas entre
ambos os sistemas.
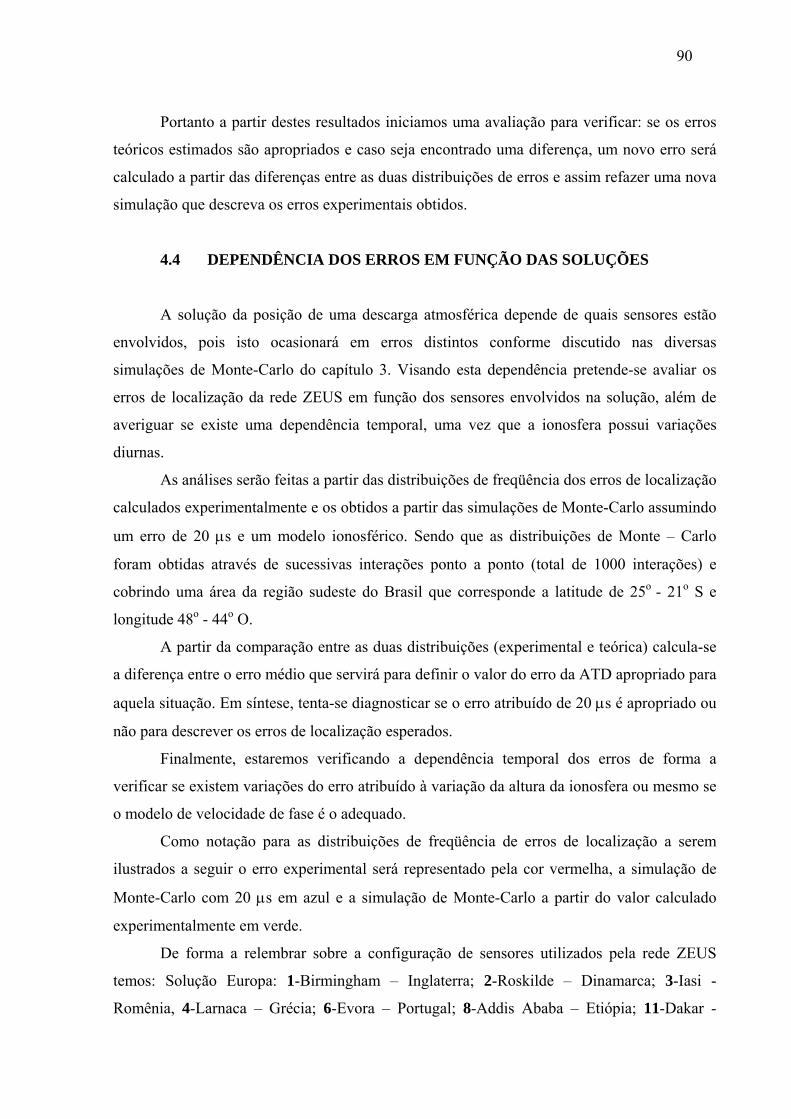
90
Portanto a partir destes resultados iniciamos uma avaliação para verificar: se os erros
teóricos estimados são apropriados e caso seja encontrado uma diferença, um novo erro será
calculado a partir das diferenças entre as duas distribuições de erros e assim refazer uma nova
simulação que descreva os erros experimentais obtidos.
4.4 DEPENDÊNCIA DOS ERROS EM FUNÇÃO DAS SOLUÇÕES
A solução da posição de uma descarga atmosférica depende de quais sensores estão
envolvidos, pois isto ocasionará em erros distintos conforme discutido nas diversas
simulações de Monte-Carlo do capítulo 3. Visando esta dependência pretende-se avaliar os
erros de localização da rede ZEUS em função dos sensores envolvidos na solução, além de
averiguar se existe uma dependência temporal, uma vez que a ionosfera possui variações
diurnas.
As análises serão feitas a partir das distribuições de freqüência dos erros de localização
calculados experimentalmente e os obtidos a partir das simulações de Monte-Carlo assumindo
um erro de 20 µs e um modelo ionosférico. Sendo que as distribuições de Monte – Carlo
foram obtidas através de sucessivas interações ponto a ponto (total de 1000 interações) e
cobrindo uma área da região sudeste do Brasil que corresponde a latitude de 25o - 21o S e
longitude 48o - 44o O.
A partir da comparação entre as duas distribuições (experimental e teórica) calcula-se
a diferença entre o erro médio que servirá para definir o valor do erro da ATD apropriado para
aquela situação. Em síntese, tenta-se diagnosticar se o erro atribuído de 20 µs é apropriado ou
não para descrever os erros de localização esperados.
Finalmente, estaremos verificando a dependência temporal dos erros de forma a
verificar se existem variações do erro atribuído à variação da altura da ionosfera ou mesmo se
o modelo de velocidade de fase é o adequado.
Como notação para as distribuições de freqüência de erros de localização a serem
ilustrados a seguir o erro experimental será representado pela cor vermelha, a simulação de
Monte-Carlo com 20 µs em azul e a simulação de Monte-Carlo a partir do valor calculado
experimentalmente em verde.
De forma a relembrar sobre a configuração de sensores utilizados pela rede ZEUS
temos: Solução Europa: 1-Birmingham – Inglaterra; 2-Roskilde – Dinamarca; 3-Iasi -
Romênia, 4-Larnaca – Grécia; 6-Evora – Portugal; 8-Addis Ababa – Etiópia; 11-Dakar -
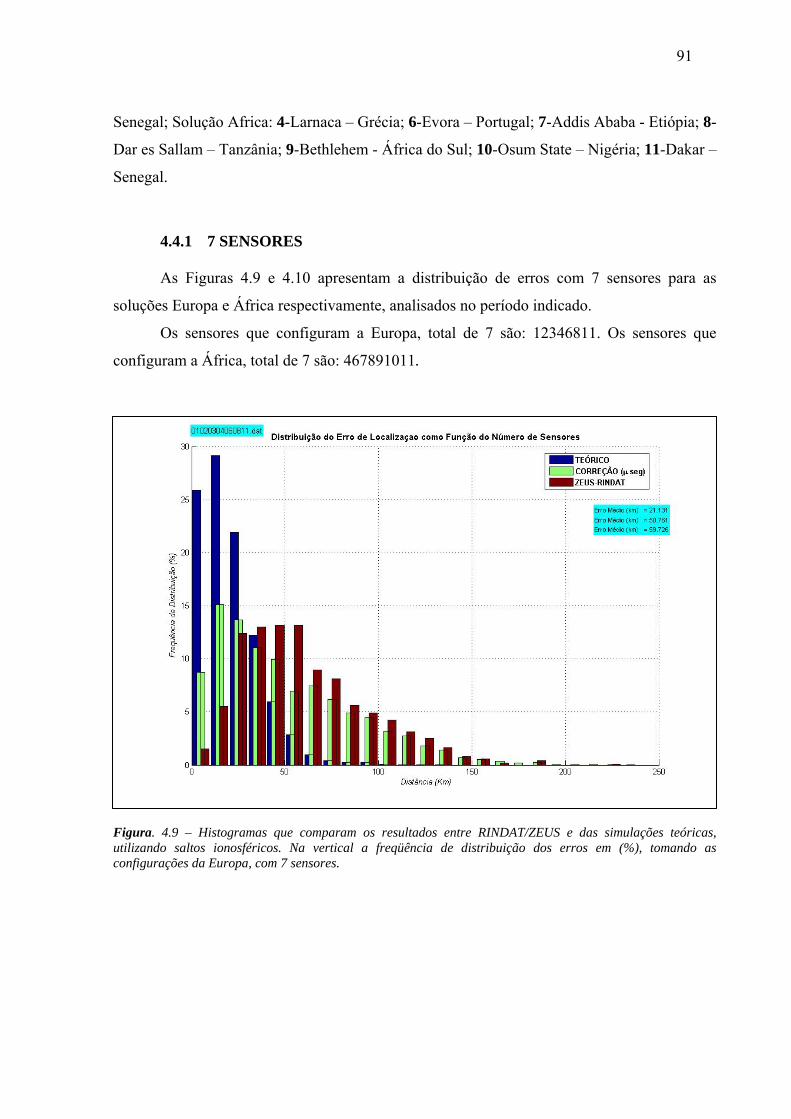
91
Senegal; Solução Africa: 4-Larnaca – Grécia; 6-Evora – Portugal; 7-Addis Ababa - Etiópia; 8-
Dar es Sallam – Tanzânia; 9-Bethlehem - África do Sul; 10-Osum State – Nigéria; 11-Dakar –
Senegal.
4.4.1 7 SENSORES As Figuras 4.9 e 4.10 apresentam a distribuição de erros com 7 sensores para as
soluções Europa e África respectivamente, analisados no período indicado.
Os sensores que configuram a Europa, total de 7 são: 12346811. Os sensores que
configuram a África, total de 7 são: 467891011.
Figura. 4.9 – Histogramas que comparam os resultados entre RINDAT/ZEUS e das simulações teóricas, utilizando saltos ionosféricos. Na vertical a freqüência de distribuição dos erros em (%), tomando as configurações da Europa, com 7 sensores.
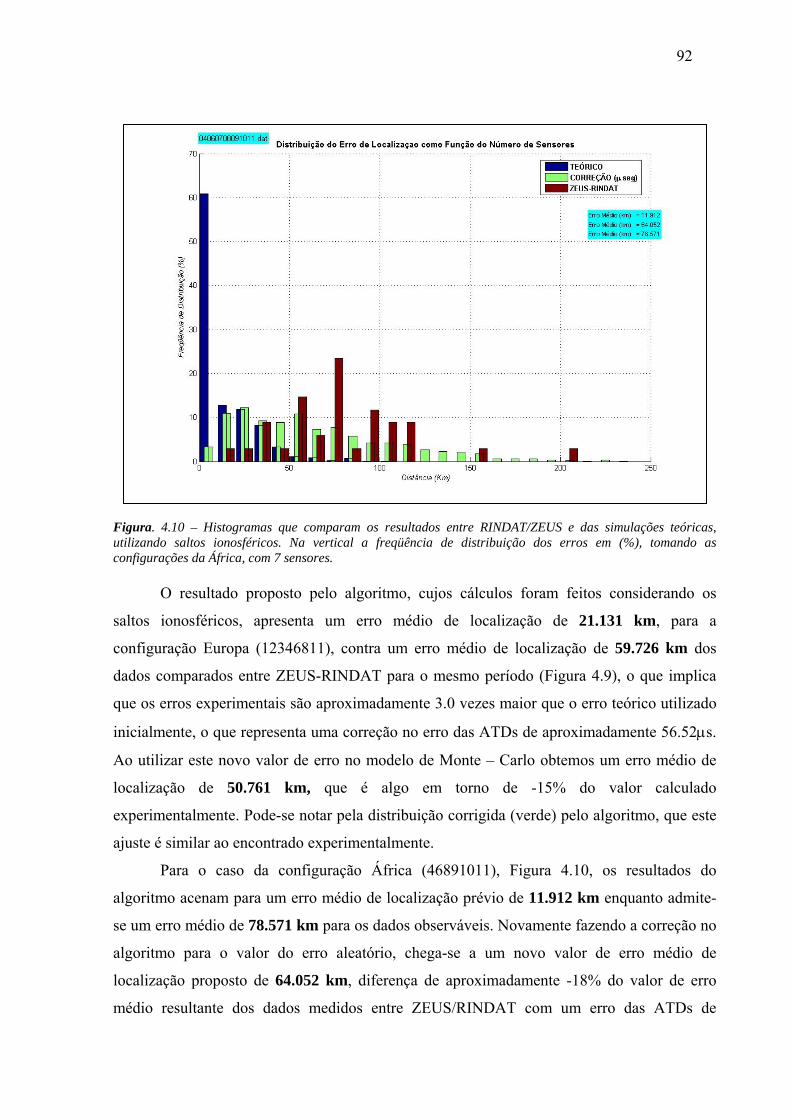
92
Figura. 4.10 – Histogramas que comparam os resultados entre RINDAT/ZEUS e das simulações teóricas, utilizando saltos ionosféricos. Na vertical a freqüência de distribuição dos erros em (%), tomando as configurações da África, com 7 sensores.
O resultado proposto pelo algoritmo, cujos cálculos foram feitos considerando os
saltos ionosféricos, apresenta um erro médio de localização de 21.131 km, para a
configuração Europa (12346811), contra um erro médio de localização de 59.726 km dos
dados comparados entre ZEUS-RINDAT para o mesmo período (Figura 4.9), o que implica
que os erros experimentais são aproximadamente 3.0 vezes maior que o erro teórico utilizado
inicialmente, o que representa uma correção no erro das ATDs de aproximadamente 56.52µs.
Ao utilizar este novo valor de erro no modelo de Monte – Carlo obtemos um erro médio de
localização de 50.761 km, que é algo em torno de -15% do valor calculado
experimentalmente. Pode-se notar pela distribuição corrigida (verde) pelo algoritmo, que este
ajuste é similar ao encontrado experimentalmente.
Para o caso da configuração África (46891011), Figura 4.10, os resultados do
algoritmo acenam para um erro médio de localização prévio de 11.912 km enquanto admite-
se um erro médio de 78.571 km para os dados observáveis. Novamente fazendo a correção no
algoritmo para o valor do erro aleatório, chega-se a um novo valor de erro médio de
localização proposto de 64.052 km, diferença de aproximadamente -18% do valor de erro
médio resultante dos dados medidos entre ZEUS/RINDAT com um erro das ATDs de
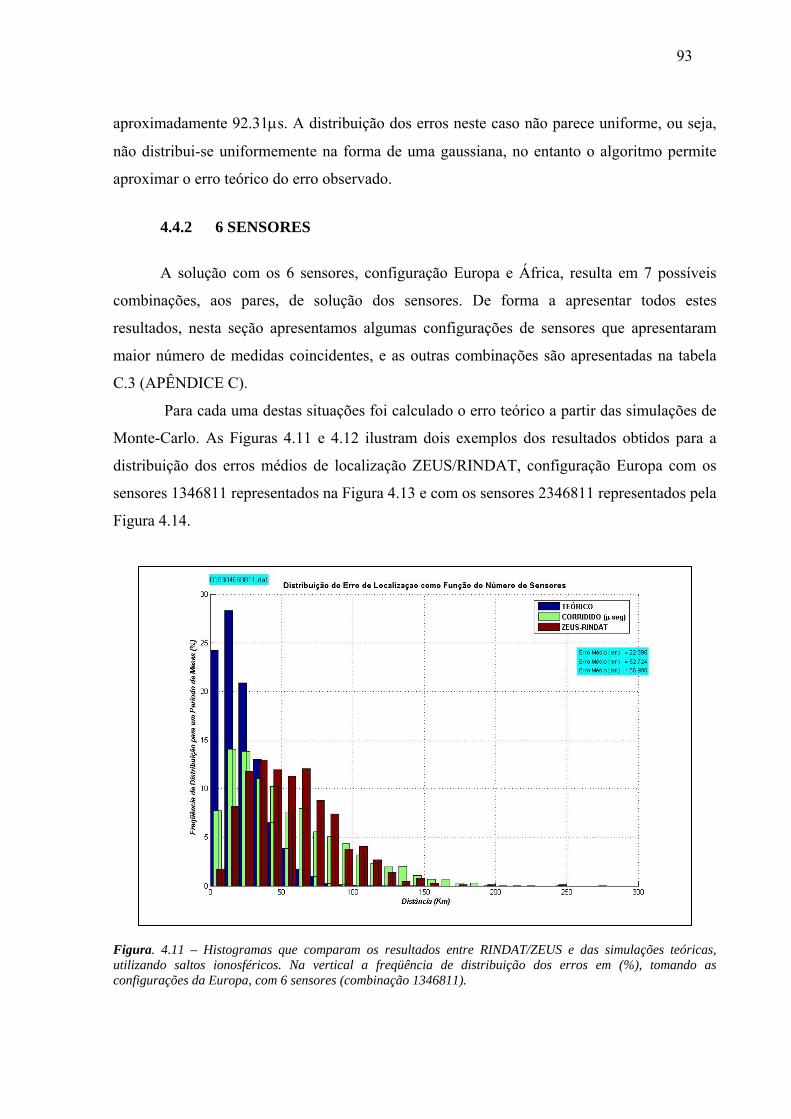
93
aproximadamente 92.31µs. A distribuição dos erros neste caso não parece uniforme, ou seja,
não distribui-se uniformemente na forma de uma gaussiana, no entanto o algoritmo permite
aproximar o erro teórico do erro observado.
4.4.2 6 SENSORES
A solução com os 6 sensores, configuração Europa e África, resulta em 7 possíveis
combinações, aos pares, de solução dos sensores. De forma a apresentar todos estes
resultados, nesta seção apresentamos algumas configurações de sensores que apresentaram
maior número de medidas coincidentes, e as outras combinações são apresentadas na tabela
C.3 (APÊNDICE C).
Para cada uma destas situações foi calculado o erro teórico a partir das simulações de
Monte-Carlo. As Figuras 4.11 e 4.12 ilustram dois exemplos dos resultados obtidos para a
distribuição dos erros médios de localização ZEUS/RINDAT, configuração Europa com os
sensores 1346811 representados na Figura 4.13 e com os sensores 2346811 representados pela
Figura 4.14.
Figura. 4.11 – Histogramas que comparam os resultados entre RINDAT/ZEUS e das simulações teóricas, utilizando saltos ionosféricos. Na vertical a freqüência de distribuição dos erros em (%), tomando as configurações da Europa, com 6 sensores (combinação 1346811).
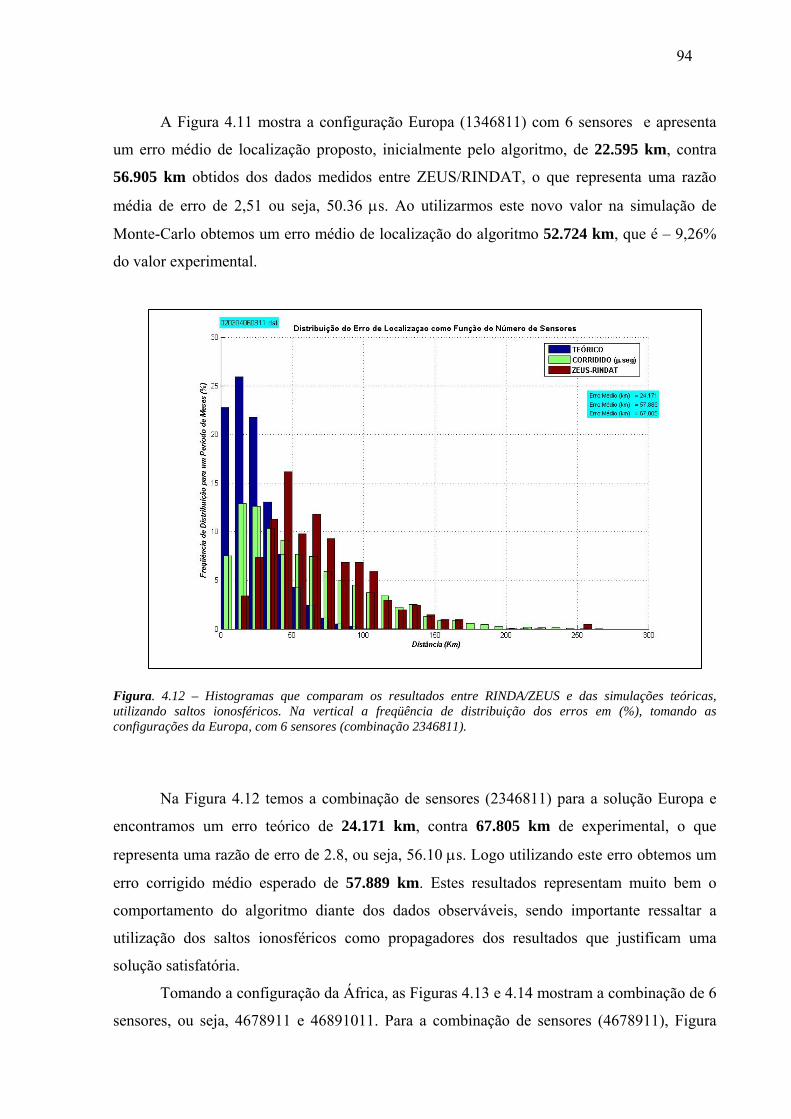
94
A Figura 4.11 mostra a configuração Europa (1346811) com 6 sensores e apresenta
um erro médio de localização proposto, inicialmente pelo algoritmo, de 22.595 km, contra
56.905 km obtidos dos dados medidos entre ZEUS/RINDAT, o que representa uma razão
média de erro de 2,51 ou seja, 50.36 µs. Ao utilizarmos este novo valor na simulação de
Monte-Carlo obtemos um erro médio de localização do algoritmo 52.724 km, que é – 9,26%
do valor experimental.
Figura. 4.12 – Histogramas que comparam os resultados entre RINDA/ZEUS e das simulações teóricas, utilizando saltos ionosféricos. Na vertical a freqüência de distribuição dos erros em (%), tomando as configurações da Europa, com 6 sensores (combinação 2346811).
Na Figura 4.12 temos a combinação de sensores (2346811) para a solução Europa e
encontramos um erro teórico de 24.171 km, contra 67.805 km de experimental, o que
representa uma razão de erro de 2.8, ou seja, 56.10 µs. Logo utilizando este erro obtemos um
erro corrigido médio esperado de 57.889 km. Estes resultados representam muito bem o
comportamento do algoritmo diante dos dados observáveis, sendo importante ressaltar a
utilização dos saltos ionosféricos como propagadores dos resultados que justificam uma
solução satisfatória.
Tomando a configuração da África, as Figuras 4.13 e 4.14 mostram a combinação de 6
sensores, ou seja, 4678911 e 46891011. Para a combinação de sensores (4678911), Figura
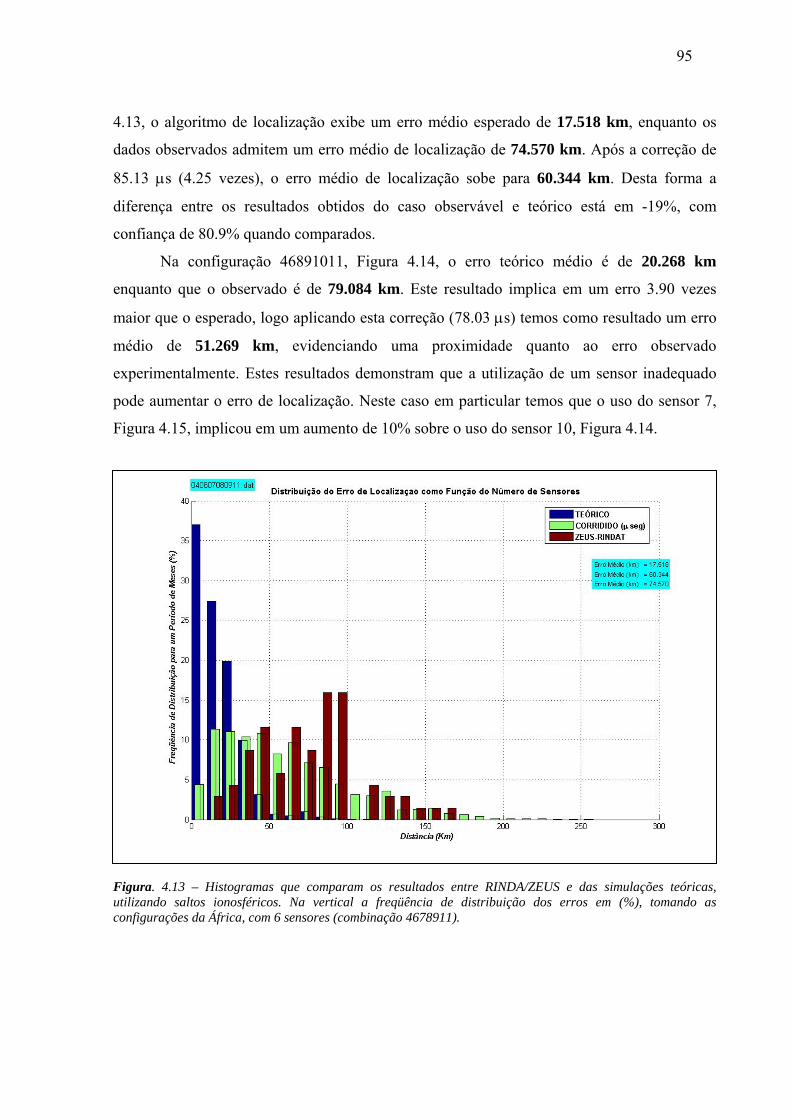
95
4.13, o algoritmo de localização exibe um erro médio esperado de 17.518 km, enquanto os
dados observados admitem um erro médio de localização de 74.570 km. Após a correção de
85.13 µs (4.25 vezes), o erro médio de localização sobe para 60.344 km. Desta forma a
diferença entre os resultados obtidos do caso observável e teórico está em -19%, com
confiança de 80.9% quando comparados.
Na configuração 46891011, Figura 4.14, o erro teórico médio é de 20.268 km
enquanto que o observado é de 79.084 km. Este resultado implica em um erro 3.90 vezes
maior que o esperado, logo aplicando esta correção (78.03 µs) temos como resultado um erro
médio de 51.269 km, evidenciando uma proximidade quanto ao erro observado
experimentalmente. Estes resultados demonstram que a utilização de um sensor inadequado
pode aumentar o erro de localização. Neste caso em particular temos que o uso do sensor 7,
Figura 4.15, implicou em um aumento de 10% sobre o uso do sensor 10, Figura 4.14.
Figura. 4.13 – Histogramas que comparam os resultados entre RINDA/ZEUS e das simulações teóricas, utilizando saltos ionosféricos. Na vertical a freqüência de distribuição dos erros em (%), tomando as configurações da África, com 6 sensores (combinação 4678911).
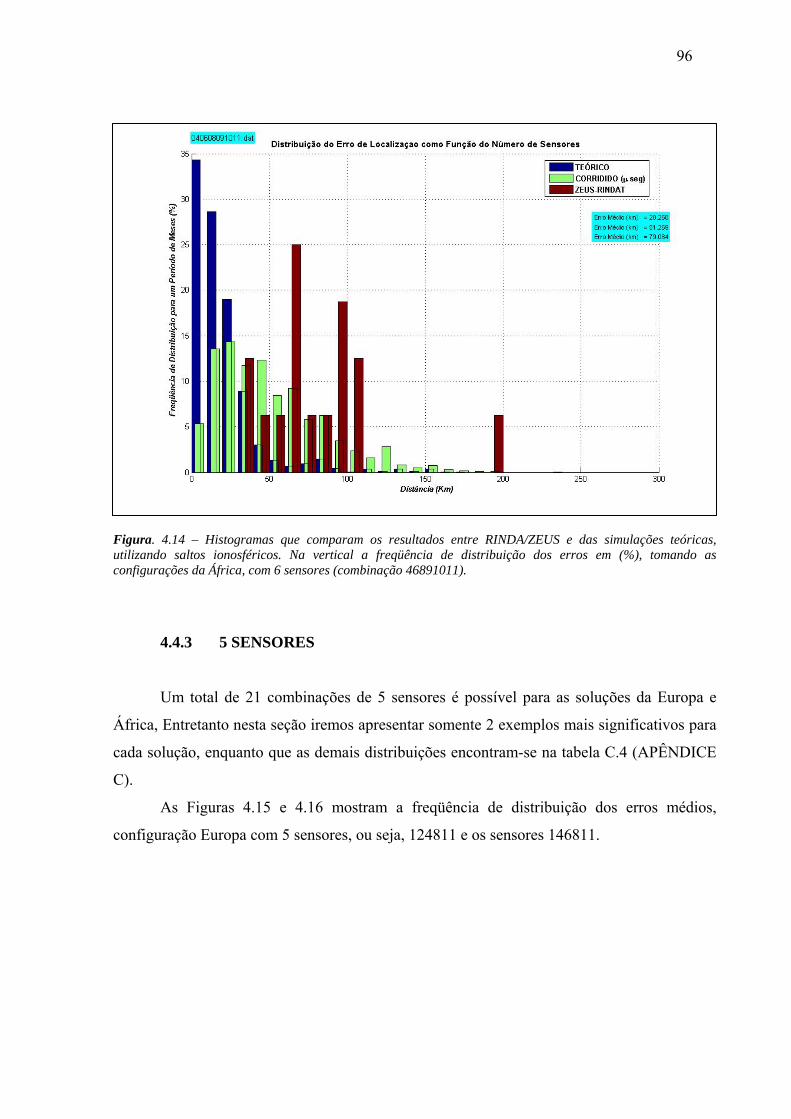
96
Figura. 4.14 – Histogramas que comparam os resultados entre RINDA/ZEUS e das simulações teóricas, utilizando saltos ionosféricos. Na vertical a freqüência de distribuição dos erros em (%), tomando as configurações da África, com 6 sensores (combinação 46891011).
4.4.3 5 SENSORES
Um total de 21 combinações de 5 sensores é possível para as soluções da Europa e
África, Entretanto nesta seção iremos apresentar somente 2 exemplos mais significativos para
cada solução, enquanto que as demais distribuições encontram-se na tabela C.4 (APÊNDICE
C).
As Figuras 4.15 e 4.16 mostram a freqüência de distribuição dos erros médios,
configuração Europa com 5 sensores, ou seja, 124811 e os sensores 146811.
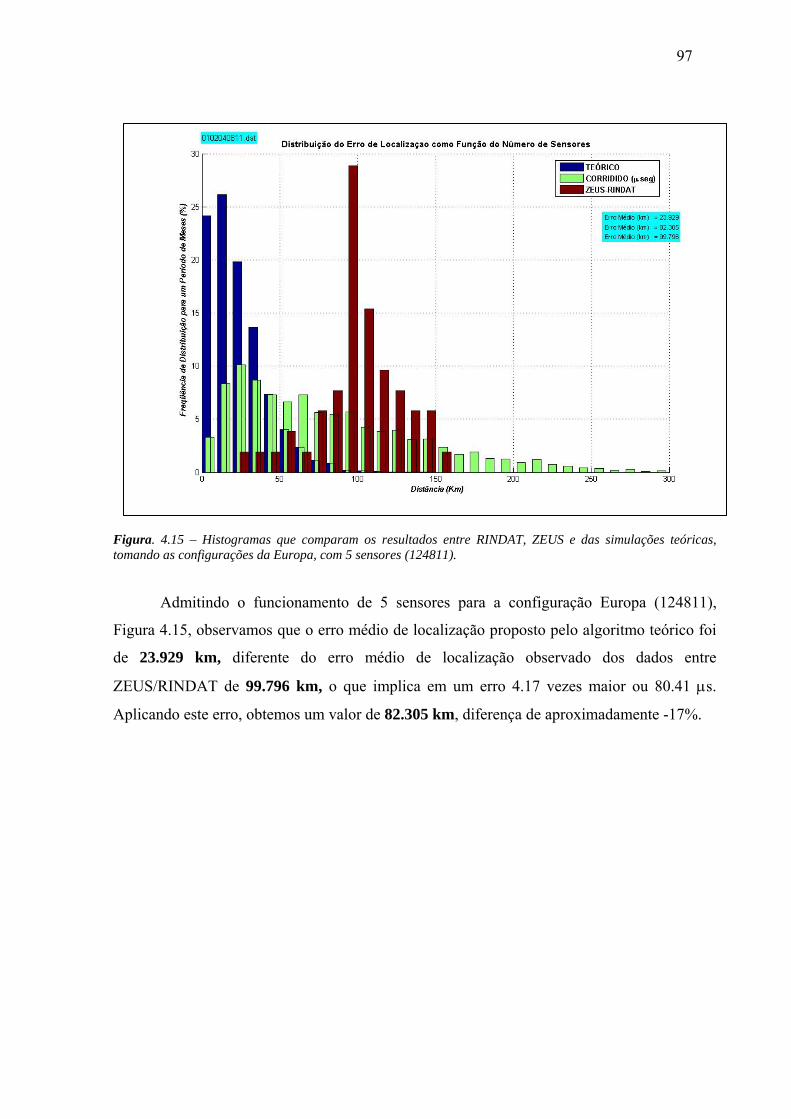
97
Figura. 4.15 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da Europa, com 5 sensores (124811).
Admitindo o funcionamento de 5 sensores para a configuração Europa (124811),
Figura 4.15, observamos que o erro médio de localização proposto pelo algoritmo teórico foi
de 23.929 km, diferente do erro médio de localização observado dos dados entre
ZEUS/RINDAT de 99.796 km, o que implica em um erro 4.17 vezes maior ou 80.41 µs.
Aplicando este erro, obtemos um valor de 82.305 km, diferença de aproximadamente -17%.
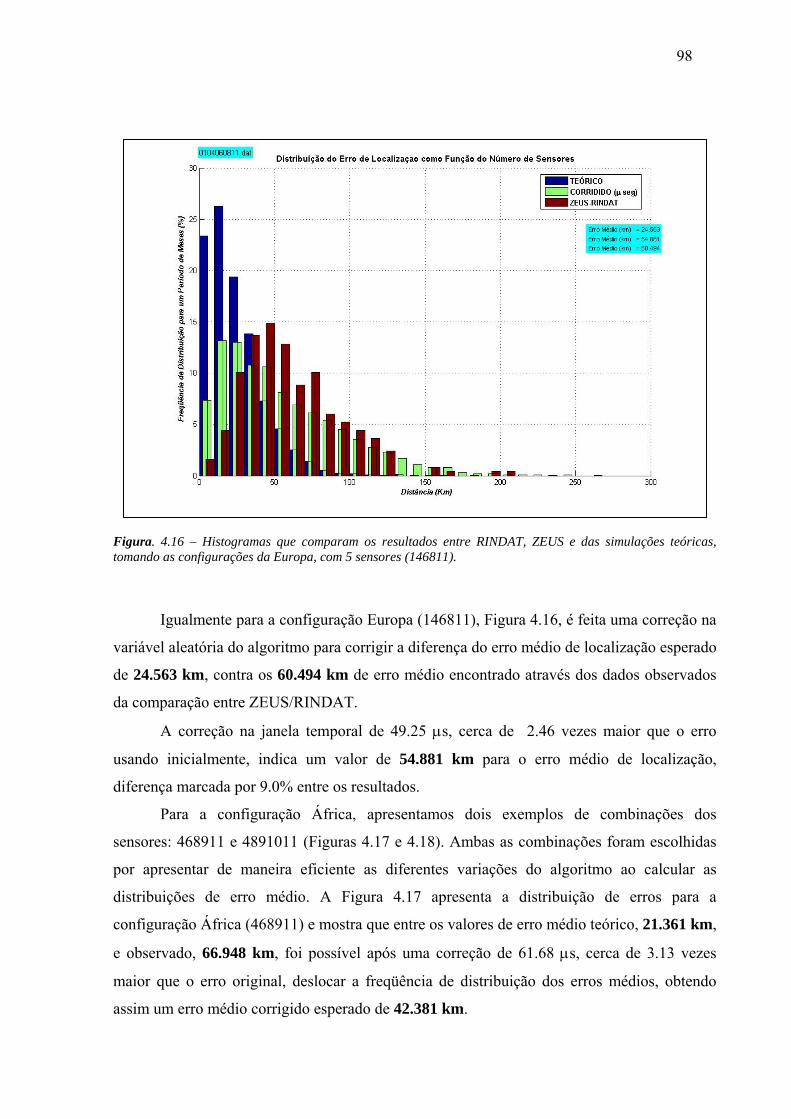
98
Figura. 4.16 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da Europa, com 5 sensores (146811).
Igualmente para a configuração Europa (146811), Figura 4.16, é feita uma correção na
variável aleatória do algoritmo para corrigir a diferença do erro médio de localização esperado
de 24.563 km, contra os 60.494 km de erro médio encontrado através dos dados observados
da comparação entre ZEUS/RINDAT.
A correção na janela temporal de 49.25 µs, cerca de 2.46 vezes maior que o erro
usando inicialmente, indica um valor de 54.881 km para o erro médio de localização,
diferença marcada por 9.0% entre os resultados.
Para a configuração África, apresentamos dois exemplos de combinações dos
sensores: 468911 e 4891011 (Figuras 4.17 e 4.18). Ambas as combinações foram escolhidas
por apresentar de maneira eficiente as diferentes variações do algoritmo ao calcular as
distribuições de erro médio. A Figura 4.17 apresenta a distribuição de erros para a
configuração África (468911) e mostra que entre os valores de erro médio teórico, 21.361 km,
e observado, 66.948 km, foi possível após uma correção de 61.68 µs, cerca de 3.13 vezes
maior que o erro original, deslocar a freqüência de distribuição dos erros médios, obtendo
assim um erro médio corrigido esperado de 42.381 km.
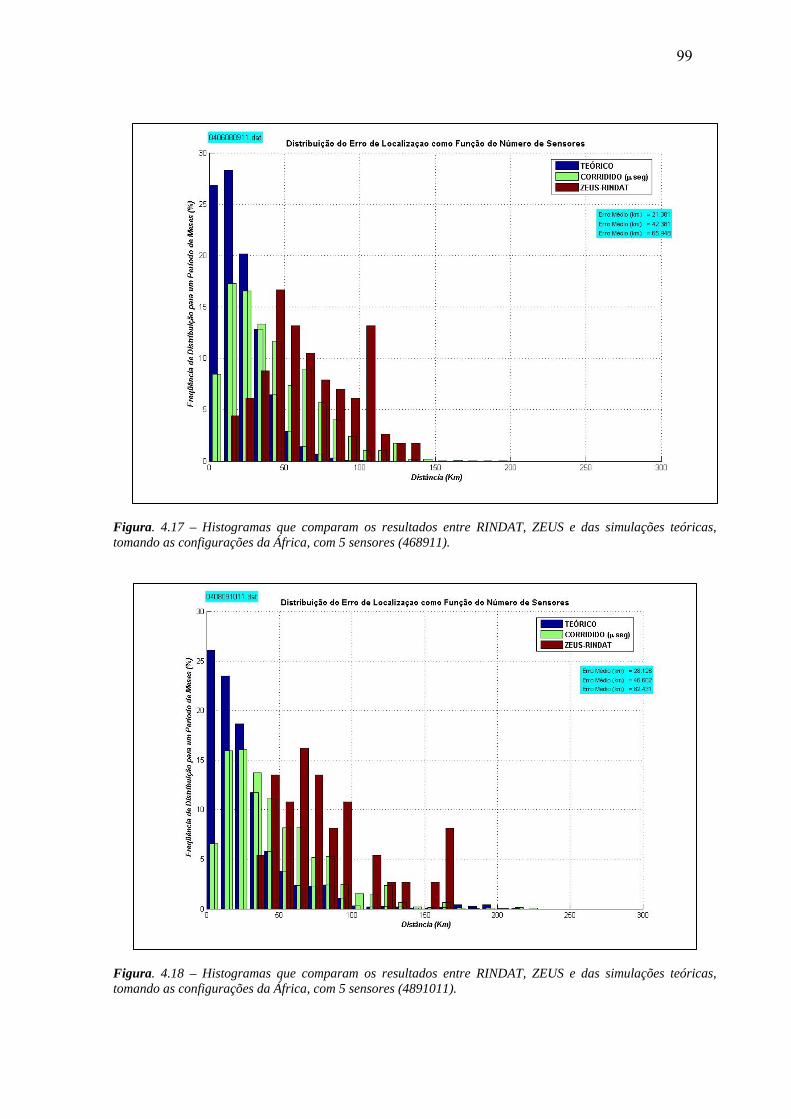
99
Figura. 4.17 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da África, com 5 sensores (468911).
Figura. 4.18 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da África, com 5 sensores (4891011).
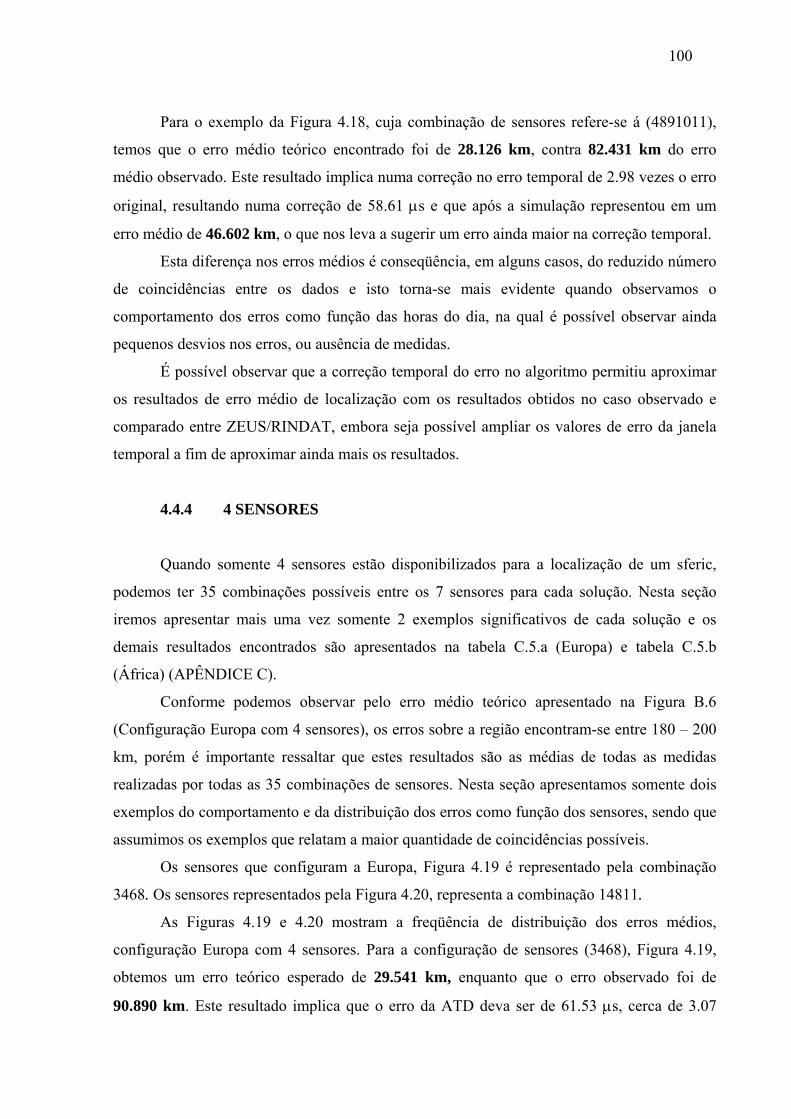
100
Para o exemplo da Figura 4.18, cuja combinação de sensores refere-se á (4891011),
temos que o erro médio teórico encontrado foi de 28.126 km, contra 82.431 km do erro
médio observado. Este resultado implica numa correção no erro temporal de 2.98 vezes o erro
original, resultando numa correção de 58.61 µs e que após a simulação representou em um
erro médio de 46.602 km, o que nos leva a sugerir um erro ainda maior na correção temporal.
Esta diferença nos erros médios é conseqüência, em alguns casos, do reduzido número
de coincidências entre os dados e isto torna-se mais evidente quando observamos o
comportamento dos erros como função das horas do dia, na qual é possível observar ainda
pequenos desvios nos erros, ou ausência de medidas.
É possível observar que a correção temporal do erro no algoritmo permitiu aproximar
os resultados de erro médio de localização com os resultados obtidos no caso observado e
comparado entre ZEUS/RINDAT, embora seja possível ampliar os valores de erro da janela
temporal a fim de aproximar ainda mais os resultados.
4.4.4 4 SENSORES Quando somente 4 sensores estão disponibilizados para a localização de um sferic,
podemos ter 35 combinações possíveis entre os 7 sensores para cada solução. Nesta seção
iremos apresentar mais uma vez somente 2 exemplos significativos de cada solução e os
demais resultados encontrados são apresentados na tabela C.5.a (Europa) e tabela C.5.b
(África) (APÊNDICE C).
Conforme podemos observar pelo erro médio teórico apresentado na Figura B.6
(Configuração Europa com 4 sensores), os erros sobre a região encontram-se entre 180 – 200
km, porém é importante ressaltar que estes resultados são as médias de todas as medidas
realizadas por todas as 35 combinações de sensores. Nesta seção apresentamos somente dois
exemplos do comportamento e da distribuição dos erros como função dos sensores, sendo que
assumimos os exemplos que relatam a maior quantidade de coincidências possíveis.
Os sensores que configuram a Europa, Figura 4.19 é representado pela combinação
3468. Os sensores representados pela Figura 4.20, representa a combinação 14811.
As Figuras 4.19 e 4.20 mostram a freqüência de distribuição dos erros médios,
configuração Europa com 4 sensores. Para a configuração de sensores (3468), Figura 4.19,
obtemos um erro teórico esperado de 29.541 km, enquanto que o erro observado foi de
90.890 km. Este resultado implica que o erro da ATD deva ser de 61.53 µs, cerca de 3.07
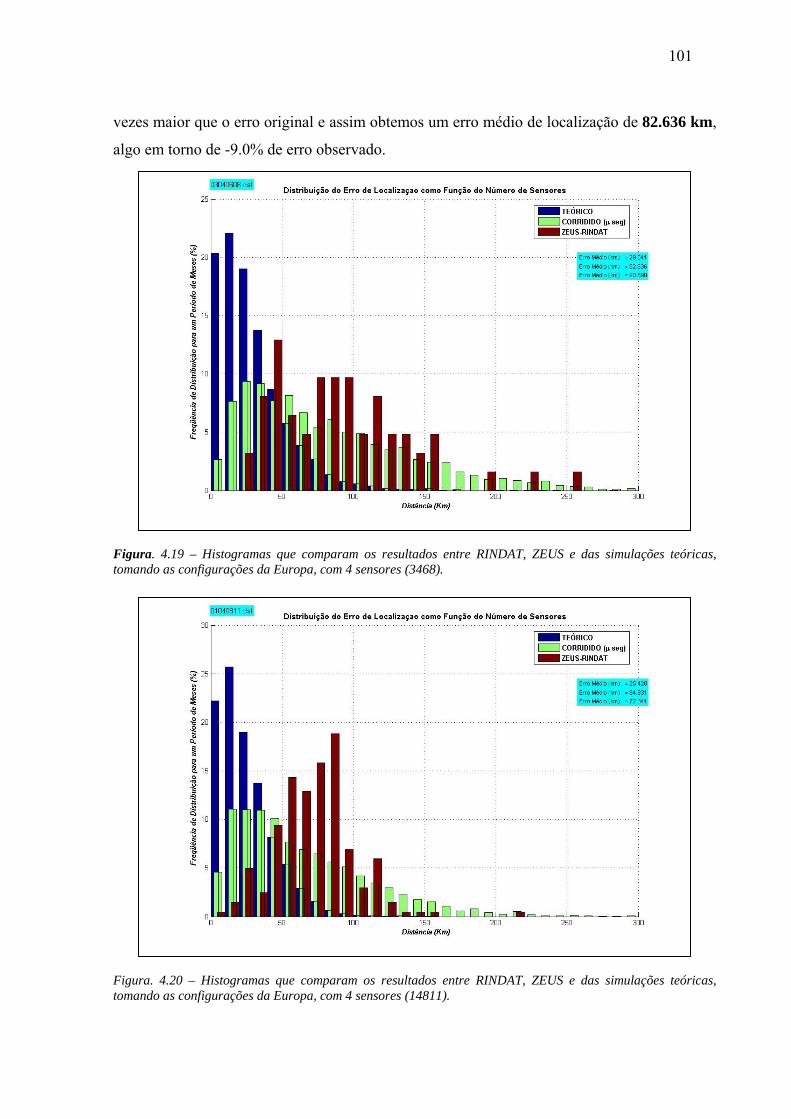
101
vezes maior que o erro original e assim obtemos um erro médio de localização de 82.636 km,
algo em torno de -9.0% de erro observado.
Figura. 4.19 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da Europa, com 4 sensores (3468).
Figura. 4.20 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da Europa, com 4 sensores (14811).
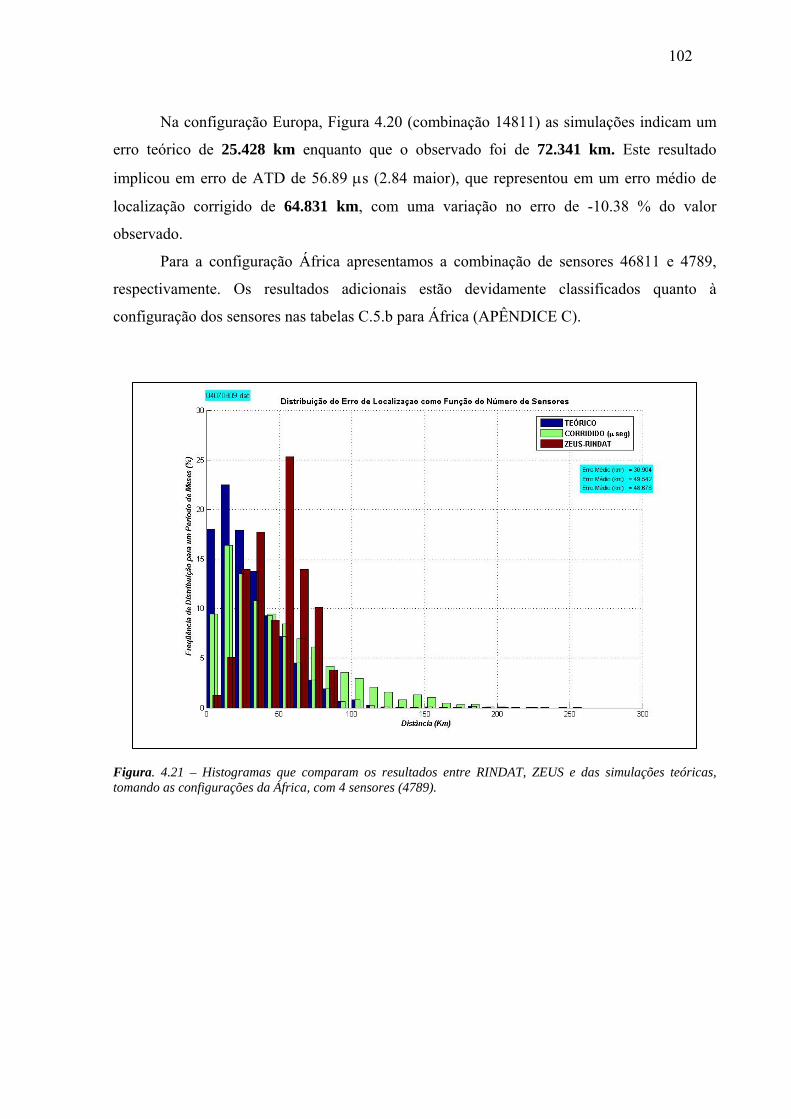
102
Na configuração Europa, Figura 4.20 (combinação 14811) as simulações indicam um
erro teórico de 25.428 km enquanto que o observado foi de 72.341 km. Este resultado
implicou em erro de ATD de 56.89 µs (2.84 maior), que representou em um erro médio de
localização corrigido de 64.831 km, com uma variação no erro de -10.38 % do valor
observado.
Para a configuração África apresentamos a combinação de sensores 46811 e 4789,
respectivamente. Os resultados adicionais estão devidamente classificados quanto à
configuração dos sensores nas tabelas C.5.b para África (APÊNDICE C).
Figura. 4.21 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da África, com 4 sensores (4789).
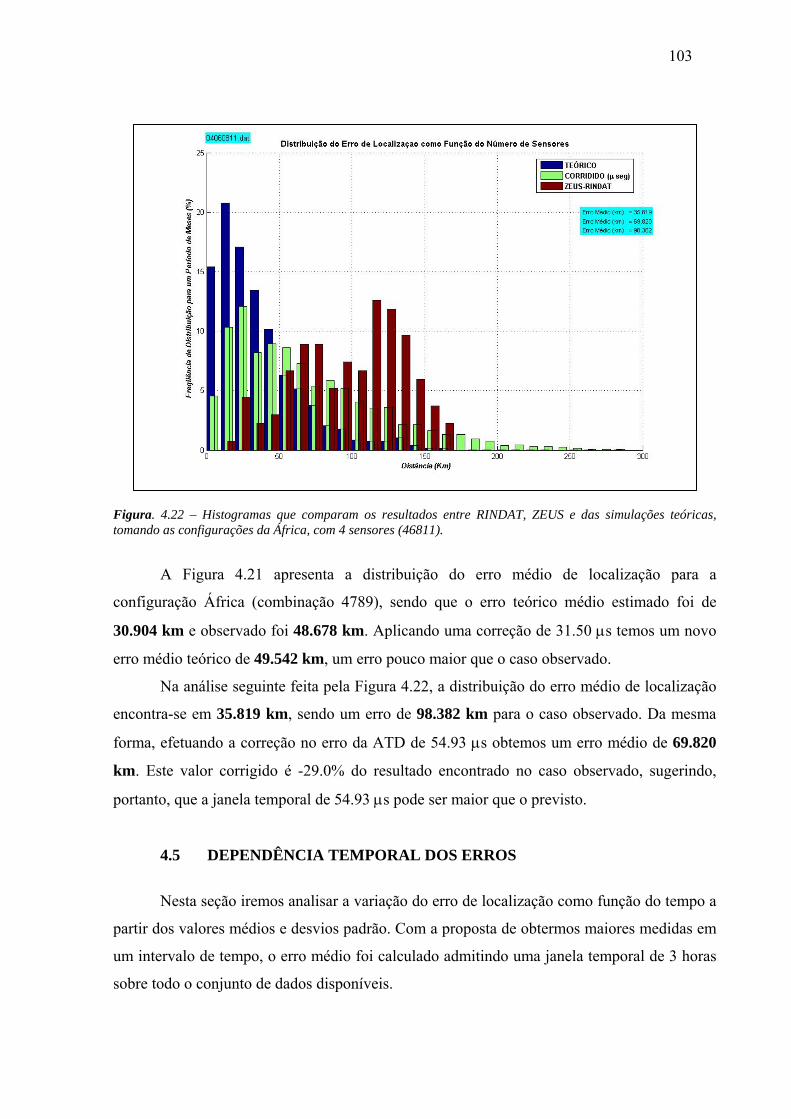
103
Figura. 4.22 – Histogramas que comparam os resultados entre RINDAT, ZEUS e das simulações teóricas, tomando as configurações da África, com 4 sensores (46811).
A Figura 4.21 apresenta a distribuição do erro médio de localização para a
configuração África (combinação 4789), sendo que o erro teórico médio estimado foi de
30.904 km e observado foi 48.678 km. Aplicando uma correção de 31.50 µs temos um novo
erro médio teórico de 49.542 km, um erro pouco maior que o caso observado.
Na análise seguinte feita pela Figura 4.22, a distribuição do erro médio de localização
encontra-se em 35.819 km, sendo um erro de 98.382 km para o caso observado. Da mesma
forma, efetuando a correção no erro da ATD de 54.93 µs obtemos um erro médio de 69.820
km. Este valor corrigido é -29.0% do resultado encontrado no caso observado, sugerindo,
portanto, que a janela temporal de 54.93 µs pode ser maior que o previsto.
4.5 DEPENDÊNCIA TEMPORAL DOS ERROS
Nesta seção iremos analisar a variação do erro de localização como função do tempo a
partir dos valores médios e desvios padrão. Com a proposta de obtermos maiores medidas em
um intervalo de tempo, o erro médio foi calculado admitindo uma janela temporal de 3 horas
sobre todo o conjunto de dados disponíveis.
104
De forma a analisar a variação temporal do erro de localização, optamos neste capítulo
por apresentar o erro médio como função do tempo para as diversas combinações de sensores
e independente da configuração adotada. Isto deve-se ao reduzido número de amostras em
determinados intervalos de tempo ou da possibilidade da ausência de determinados sensores
na solução. Desta maneira é possível verificar se existe uma dependência temporal em relação
à variação da altura da ionosfera e da conseqüente redução do número de sensores.
A Figura 4.23 apresenta a distribuição temporal dos erros de localização para as
respectivas soluções de 4,5,6 e 7 sensores de VLF independente da solução continentalmente
adotada. Assumindo que a região Sudeste do Brasil amanhece e anoitece às 09h00min UTC e
21h00min UTC, podemos admitir por simplicidade que entre o período das 09h00min –
21h00min UTC têm-se o período diurno na região Sudeste e entre 22h00min – 08h00min
UTC o período noturno, com a transição de dia e noite entre 08h00min – 09h00min UTC e
21h00min – 22h00min UTC, respectivamente.
De acordo com o resultado apresentado na Figura 4.23 existe uma variação diurna do
erro de localização percebida entre 08h00min – 11h00min UTC quando o erro aumenta e
estabiliza até aproximadamente 19h00min UTC; Posteriormente o erro diminui até 03h00min
– 06h00min UTC.
As variações mais significativas estão durante a transição da noite para o dia,
respectivamente com uma taxa de 7% e 5% para 4 sensores, 18% e 5% para 5 sensores, 7% e
2% para 6 sensores e finalmente de 12% e 0.2% para 7 sensores.
Em todas as configurações de sensores as variações entre 03h00min – 09h00min UTC
possuem comportamento uniforme e definido, isto pode estar correlacionado com as variações
da altura da ionosfera que, para a Europa e África que se encontram durante o dia a altura é ~
70 km e para o Sudeste do Brasil é ~90 km. Com o avanço do período diurno a altura da
ionosfera cai de 90 km para 70 km em menos de 1-2 horas.
Quando África, Europa e Brasil estão durante o dia é possível perceber que o erro não
apresenta variações, porém à medida que os sensores vão entrando no período noturno os
erros diminuem. Isto pode ser explicado pelo fato que além de uma maior altura,
proporcionando uma propagação mais longa, o sinal de VLF sofre menor interferência e
consequentemente menor ruído o que propicia uma melhor definição das ATDs.
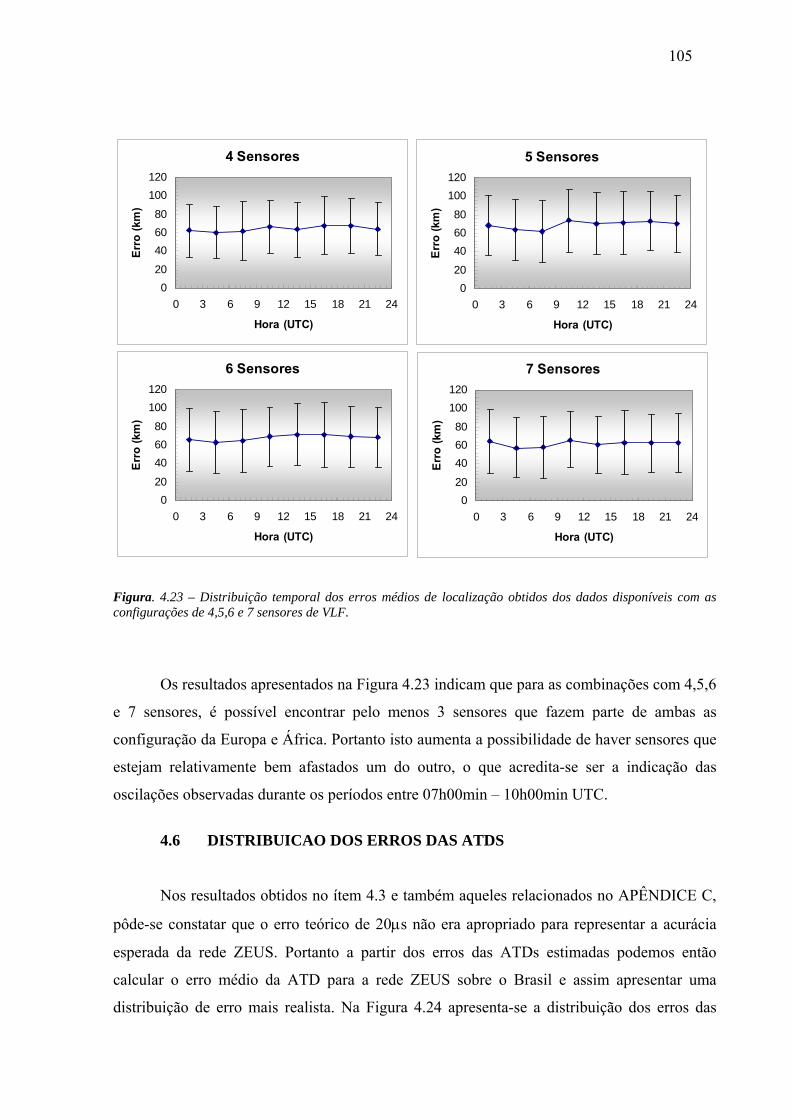
105
Figura. 4.23 – Distribuição temporal dos erros médios de localização obtidos dos dados disponíveis com as configurações de 4,5,6 e 7 sensores de VLF.
Os resultados apresentados na Figura 4.23 indicam que para as combinações com 4,5,6
e 7 sensores, é possível encontrar pelo menos 3 sensores que fazem parte de ambas as
configuração da Europa e África. Portanto isto aumenta a possibilidade de haver sensores que
estejam relativamente bem afastados um do outro, o que acredita-se ser a indicação das
oscilações observadas durante os períodos entre 07h00min – 10h00min UTC.
4.6 DISTRIBUICAO DOS ERROS DAS ATDS
Nos resultados obtidos no ítem 4.3 e também aqueles relacionados no APÊNDICE C,
pôde-se constatar que o erro teórico de 20µs não era apropriado para representar a acurácia
esperada da rede ZEUS. Portanto a partir dos erros das ATDs estimadas podemos então
calcular o erro médio da ATD para a rede ZEUS sobre o Brasil e assim apresentar uma
distribuição de erro mais realista. Na Figura 4.24 apresenta-se a distribuição dos erros das
5 Sensores
020
406080
100120
0 3 6 9 12 15 18 21 24
Hora (UTC)
Err
o (k
m)
4 Sensores
020
406080
100120
0 3 6 9 12 15 18 21 24
Hora (UTC)
Erro
(km
)
6 Sensores
020
406080
100120
0 3 6 9 12 15 18 21 24
Hora (UTC)
Err
o (k
m)
7 Sensores
020
406080
100120
0 3 6 9 12 15 18 21 24
Hora (UTC)
Err
o (k
m)
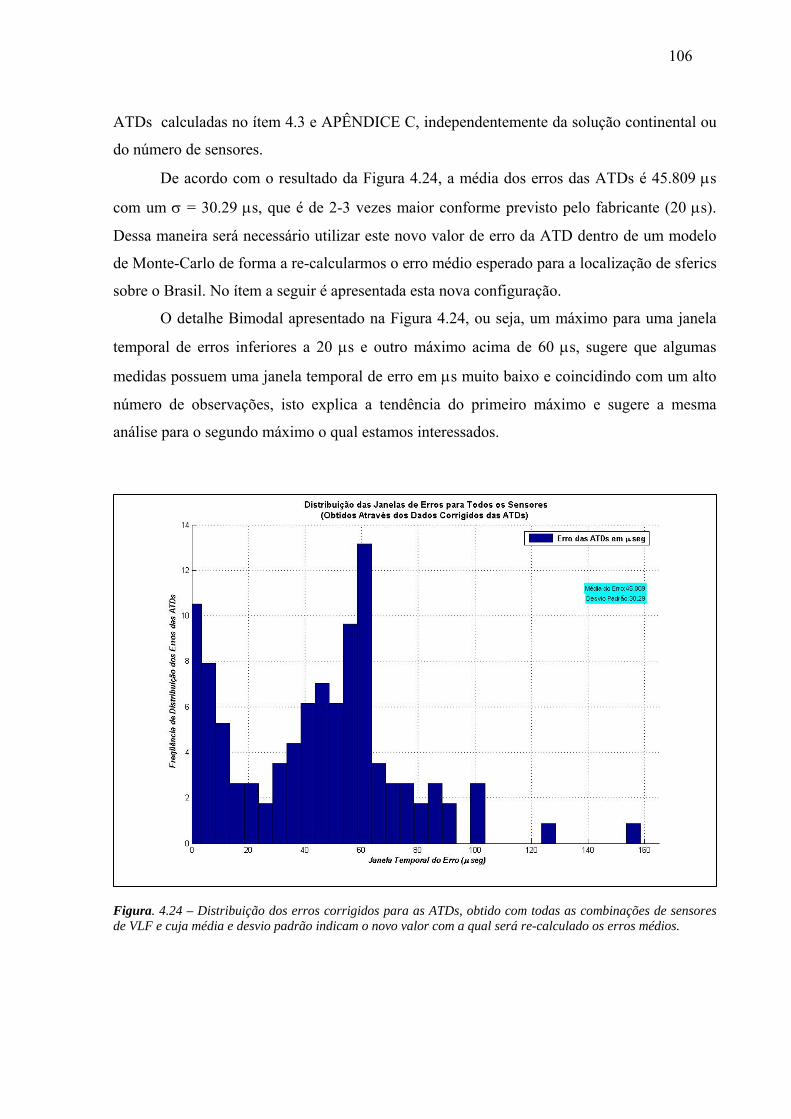
106
ATDs calculadas no ítem 4.3 e APÊNDICE C, independentemente da solução continental ou
do número de sensores.
De acordo com o resultado da Figura 4.24, a média dos erros das ATDs é 45.809 µs
com um σ = 30.29 µs, que é de 2-3 vezes maior conforme previsto pelo fabricante (20 µs).
Dessa maneira será necessário utilizar este novo valor de erro da ATD dentro de um modelo
de Monte-Carlo de forma a re-calcularmos o erro médio esperado para a localização de sferics
sobre o Brasil. No ítem a seguir é apresentada esta nova configuração.
O detalhe Bimodal apresentado na Figura 4.24, ou seja, um máximo para uma janela
temporal de erros inferiores a 20 µs e outro máximo acima de 60 µs, sugere que algumas
medidas possuem uma janela temporal de erro em µs muito baixo e coincidindo com um alto
número de observações, isto explica a tendência do primeiro máximo e sugere a mesma
análise para o segundo máximo o qual estamos interessados.
Figura. 4.24 – Distribuição dos erros corrigidos para as ATDs, obtido com todas as combinações de sensores de VLF e cuja média e desvio padrão indicam o novo valor com a qual será re-calculado os erros médios.
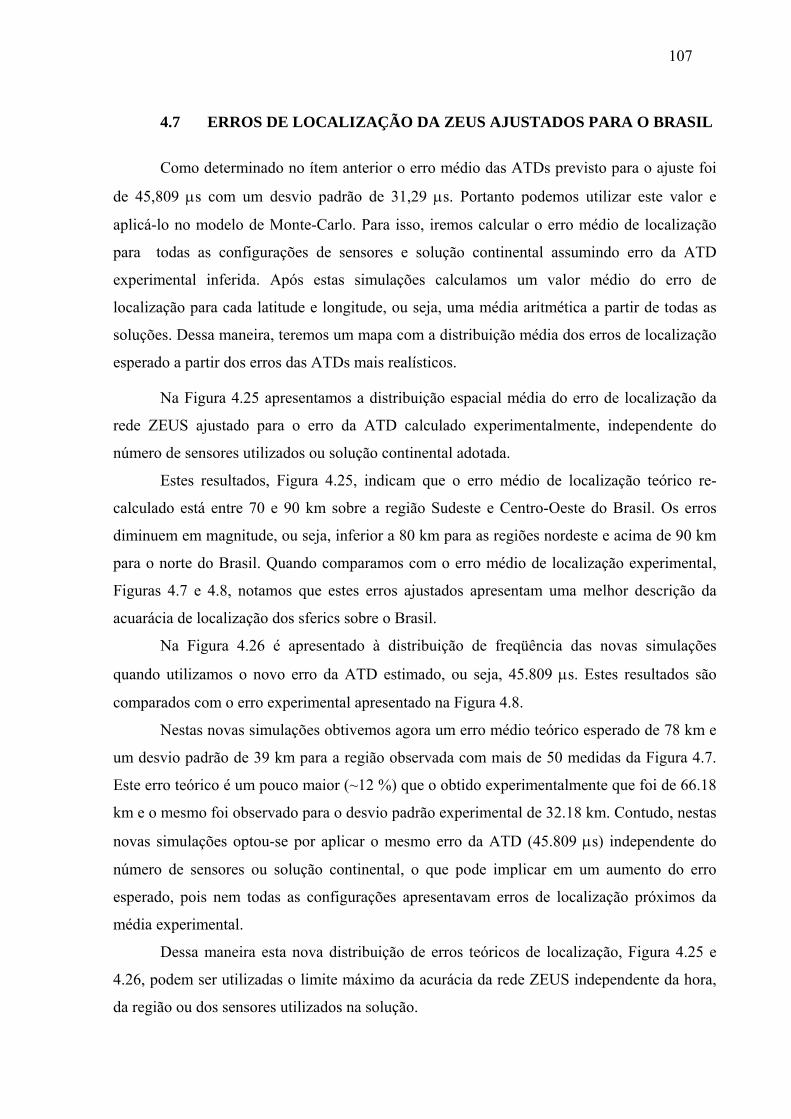
107
4.7 ERROS DE LOCALIZAÇÃO DA ZEUS AJUSTADOS PARA O BRASIL
Como determinado no ítem anterior o erro médio das ATDs previsto para o ajuste foi
de 45,809 µs com um desvio padrão de 31,29 µs. Portanto podemos utilizar este valor e
aplicá-lo no modelo de Monte-Carlo. Para isso, iremos calcular o erro médio de localização
para todas as configurações de sensores e solução continental assumindo erro da ATD
experimental inferida. Após estas simulações calculamos um valor médio do erro de
localização para cada latitude e longitude, ou seja, uma média aritmética a partir de todas as
soluções. Dessa maneira, teremos um mapa com a distribuição média dos erros de localização
esperado a partir dos erros das ATDs mais realísticos.
Na Figura 4.25 apresentamos a distribuição espacial média do erro de localização da
rede ZEUS ajustado para o erro da ATD calculado experimentalmente, independente do
número de sensores utilizados ou solução continental adotada.
Estes resultados, Figura 4.25, indicam que o erro médio de localização teórico re-
calculado está entre 70 e 90 km sobre a região Sudeste e Centro-Oeste do Brasil. Os erros
diminuem em magnitude, ou seja, inferior a 80 km para as regiões nordeste e acima de 90 km
para o norte do Brasil. Quando comparamos com o erro médio de localização experimental,
Figuras 4.7 e 4.8, notamos que estes erros ajustados apresentam uma melhor descrição da
acuarácia de localização dos sferics sobre o Brasil.
Na Figura 4.26 é apresentado à distribuição de freqüência das novas simulações
quando utilizamos o novo erro da ATD estimado, ou seja, 45.809 µs. Estes resultados são
comparados com o erro experimental apresentado na Figura 4.8.
Nestas novas simulações obtivemos agora um erro médio teórico esperado de 78 km e
um desvio padrão de 39 km para a região observada com mais de 50 medidas da Figura 4.7.
Este erro teórico é um pouco maior (~12 %) que o obtido experimentalmente que foi de 66.18
km e o mesmo foi observado para o desvio padrão experimental de 32.18 km. Contudo, nestas
novas simulações optou-se por aplicar o mesmo erro da ATD (45.809 µs) independente do
número de sensores ou solução continental, o que pode implicar em um aumento do erro
esperado, pois nem todas as configurações apresentavam erros de localização próximos da
média experimental.
Dessa maneira esta nova distribuição de erros teóricos de localização, Figura 4.25 e
4.26, podem ser utilizadas o limite máximo da acurácia da rede ZEUS independente da hora,
da região ou dos sensores utilizados na solução.
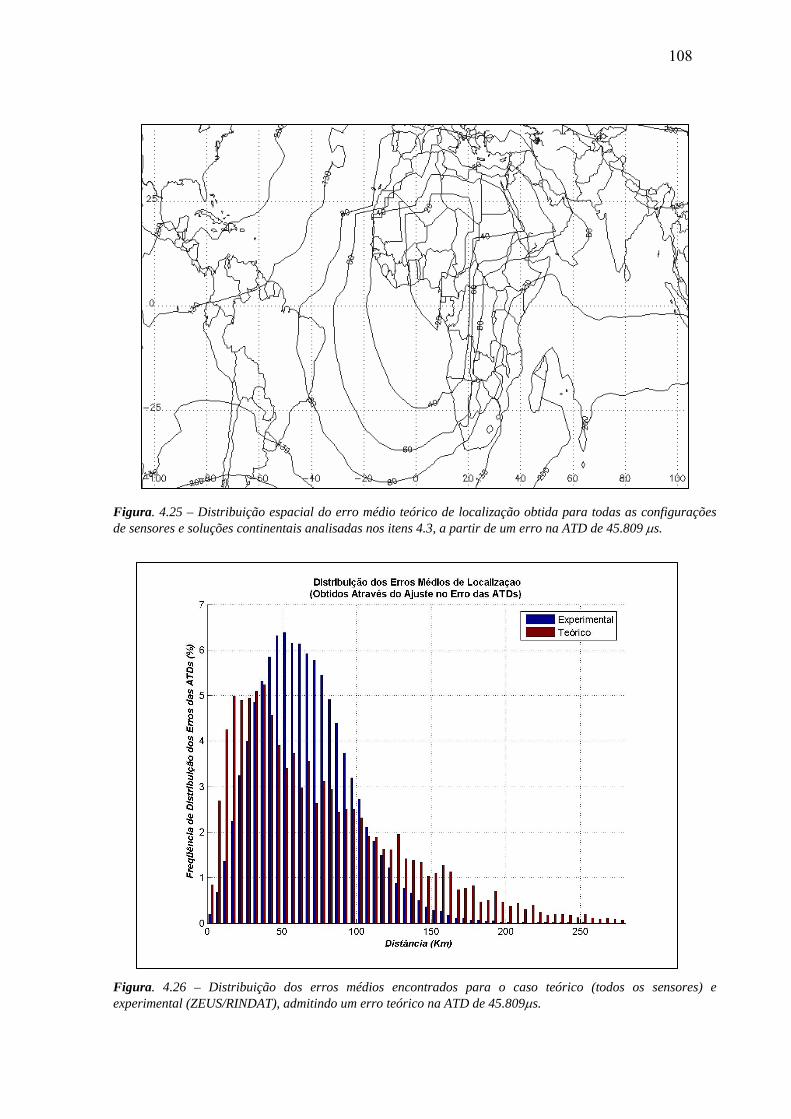
108
Figura. 4.25 – Distribuição espacial do erro médio teórico de localização obtida para todas as configurações de sensores e soluções continentais analisadas nos itens 4.3, a partir de um erro na ATD de 45.809 µs.
Figura. 4.26 – Distribuição dos erros médios encontrados para o caso teórico (todos os sensores) e experimental (ZEUS/RINDAT), admitindo um erro teórico na ATD de 45.809µs.
109
CAPÍTULO 5
CONCLUSÃO Esta dissertação de mestrado apresentou uma avaliação do erro de localização da rede
ZEUS sobre a região Sudeste e Centro-Oeste do Brasil. Esta avaliação foi analisada
teoricamente e experimentalmente. Sendo que as análises teóricas contaram com o
desenvolvimento de um algoritmo de localização de descargas atmosféricas a partir do
método Arrival Time Difference. Neste modelo foram verificados os erros associados às
diferentes formas de propagação do sinal, ou seja, ionosfera e geóide, bem como a
dependência da não parametrização da ionosfera ou forma da Terra. Finalmente, as medidas
da ZEUS são comparadas com a rede RINDAT para obtermos os valores de erro
experimental. Estes erros são então utilizados para finalmente obtermos uma distribuição mais
coerente dos erros de localização da rede ZEUS. A seguir, iremos apresentar as conclusões
mais significativas obtidas neste trabalho dividas em sub-tópicos.
5.1 ALGORITMO DE LOCALIZAÇÃO A PARTIR DO MÉTODO DA ATD.
Foi desenvolvido um algoritmo de localização de sferics, o qual pudesse considerar
toda a teoria acerca do método do arrival time difference – ATD. Posteriormente este método
foi inserido dentro de um modelo de Monte-Carlo o que permitiu realizar simulações teóricas
sobre a localização de descargas atmosféricas e assim inferir os erros de localização em
função de várias condições.
Dentre as várias simulações elaboradas tentou-se diagnosticar os efeitos na localização
dos sferics quando da utilização de saltos-ionosféricos ou mesmo uma simplificação de
propagação sem saltos-ionosféricos, com a utilização da forma geodésica da Terra ou não.
Este tipo de análise será útil para verificar se o algoritmo de localização da rede ZEUS
encontra-se ajustado.
Os resultados das simulações do erro médio de localização utilizando, uma propagação
sobre a superfície terrestre usando a Terra descrita por uma esfera de raio 6.371 km ou um
110
modelo geodésico WSG84, indicaram poucas discrepâncias entre o erro médio previsto. As
maiores diferenças são notadas quando sensores de um hemisfério são utilizados na solução
sobre o hemisfério oposto e isto pode ser observado nos casos em que a distribuição do erro
médio sobre a América do Sul é de ~ 10 km na configura África e de ~ 20 km na configuração
Europa. Portanto a adoção de um modelo geodésico é o mais apropriado para descrever a
propagação do sinal eletromagnético sobre a superfície da Terra.
Nas simulações que envolvem diferentes propagações do sinal, ou seja, saltos-
ionosféricos e sobre a superfície terrestre, foram realizadas duas configurações assumindo o
modelo geodésico para descrever a Terra: a) ATD teórica admite salto-ionosférico e ATD
medido propagação sobre a superfície Terrestre e; b) ATD teórica admite propagação sobre a
superfície terrestre e ATD medida admite propagação via salto-ionosférico.
No caso de ATD teórica com saltos e medida sem saltos ionosféricos (Figuras 3.18 à
3.21), observou-se uma grande variação na magnitude do erro teórico esperado assumindo
como referência as simulações completas com saltos ionosféricos (Figuras 3.6 à 3.9). Esta
variação pode ser observada sobre a América do Sul o qual apresentou um erro médio de 3-4
vezes maior que o erro médio observado nas simulações com saltos ionosféricos. A mesma
magnitude do erro teórico é observado para as regiões do continente Africano e Europeu que
apresentam uma variação de até 10 km.
No caso de ATD teórica sem saltos e medida com saltos ionosféricos (Figuras 3.14 à
3.17), observou-se também o mesmo efeito analisado na configuração inversa, ou seja, uma
grande variação na magnitude do erro teórico esperado, cerca de 3-4 vezes maior assumindo
como referência as simulações completas com saltos ionosféricos (Figuras 3.6 à 3.9). A
magnitude do erro teórico esperado, por exemplo, para a América do Sul, seria entre 15-30
km, conforme as simulações com saltos ionosféricos, porém para ambos os casos a) e b) o
erro encontrado foi entre 50-100 km.
Dessa maneira, estas simulações demonstram que o não tratamento adequado da
representação da ATD teórica que incorpora os saltos ionosféricos e a forma geodésica da
Terra pode implicar em erros relativamente grandes na solução dos sferics. No caso da rede
ZEUS, este modelo ionosférico é parametrizado a partir da velocidade de fase, que simula as
variações da ionosfera. Durante a noite aonde o caminho é mais longo e menos atenuado,
temos uma velocidade menor (demora mais tempo para chegar no receptor) e durante o dia
aonde a propagação é mais curta e mais atenuada temos uma velocidade maior ( o sinal chega
mais rápido).
111
Diante da comparação entre os resultados encontrados para o erro médio de
localização das simulações com saltos ionosféricos (modelo ionosférico) e sem saltos (modelo
geodésico), é possível concluir que existem poucas discrepâncias entre os valores de erro
médio de localização de uma forma de simulação para outra. Isto indica que algumas
simplificações podem ser feitas e o modelo que considera apenas a forma geodésica da Terra
sem saltos na ionosfera, pode ser utilizado para observar o comportamento do erro médio sem
perder a credibilidade na análise, porém é importante considerar que para uma propagação de
VLF a mais de 5.000 km de distância um modelo geodésico com saltos ionosféricos deve ser
pertinente, devido a grandes variações da altura da ionosfera.
5.2 DISTRIBUIÇÃO DOS ERROS DE LOCALIZAÇÃO EXPERIMENTAL
A partir da comparação entre as medidas coincidentes da rede ZEUS e RINDAT
foram elaborados mapas que descrevem as distribuições espaciais dos erros de localização da
rede ZEUS sobre a região Sudeste e Centro-Oeste do Brasil. Os resultados apresentados
indicam que a rede ZEUS possui um erro médio de 66.18 km com um desvio padrão de 32.18
km independente dos sensores utilizados ou solução continental adotada. A partir das
distribuições cumulativas observou que mais de 80% das medidas da rede ZEUS
apresentavam erros abaixo de 80 km.
Portanto, como observado os erros de localização são maiores ou menores dependendo
da combinação dos sensores utilizados. No sistema de localização em tempo real, a solução é
feita a partir dos dados disponíveis que as vezes não são apropriados para algumas regiões.
No caso específico da região Sudeste e Centro-Oeste do Brasil, este efeito torna-se
amplificado quando utilizamos 4 e 5 sensores. As Figuras B3 e B6 (APÊNDICE B) indicam
que o erro para esta região varia entre 50-100 km considerando as combinações com 4
sensores e entre 20-80 km considerando as combinações com 5 sensores, conforme as Figuras
B2 e B5. Estas variações indicam sensores apropriados para a observação, exemplo do sensor
13468 (5 sensores) que realizou, para todo o período de dados disponíveis, 15 medidas sendo
possível corrigir o erro médio de localização com uma variação de 5%. No entanto alguns
sensores apresentam muitas medidas, porém não respondem por uma medida confiável,
exemplo do sensor 1234 (4 sensores) que realizou 2381 medidas no período, mas que resultou
em mais de 90% na variação do erro médio de localização corrigido.
112
5.3 DEPENDÊNCIA TEMPORAL DOS ERROS DE LOCALIZAÇÃO
Pôde-se notar que além da dependência dos sensores na solução da localização dos
sferics existe uma dependência temporal do erro, ou seja, basicamente o erro variava durante
os períodos de transição: dia para noite e noite para o dia. Os erros aumentavam durante a
transição da noite para o dia, 7 à 18%, enquanto que durante a transição do dia para à noite era
entre 0 e 5%. Sendo que o erro maior, transição da noite para o dia, pode ser devido ao fato de
que as tempestades sobre o Brasil encontram-se à noite e o sinal emitido se propaga sob
condições diurnas até os sensores na África e Europa. Isto quer dizer que o sinal sofre grandes
atenuações ao longo da propagação e experimentará variações da altura da camada da
ionosfera. Por outro lado, durante o período vespertino, aonde temos a transição do dia para a
noite, o sinal eletromagnético se propaga basicamente sob condições noturnas até a África e
Europa, logo sofrendo uma menor interferência. Portanto nestes períodos de transição, a
forma de onda dos sferics pode apresentar um maior ou menor ruído, o que implicará em uma
pior ou melhor definição das ATDs.
5.4 DISTRIBUIÇÃO DO ERRO DE LOCALIZAÇÃO DA REDE ZEUS
AJUSTADO PARA O BRASIL.
A partir da comparação da rede ZEUS e RINDAT foi possível calcular o erro da ATD
experimentalmente, o qual representava os erros de localização observados. Utilizando-se o
erro temporal de 45,809 µs nas ATD, foram feitas novas simulações de Monte-Carlo com o
objetivo de descrever a distribuição espacial do erro de localização da rede ZEUS ajustado
para o novo erro da ATD calculado experimentalmente.
Estas novas simulações proporcionaram um erro médio de localização entre 70 e 90
km sobre a região Sudeste e Centro-Oeste do Brasil, sendo que o erro médio de localização
foi de 78 km com um desvio padrão de 39 km. Estes resultados indicam que a simulação
teórica é 12% mais pessimista que as obtidas experimentalmente. Contudo, optou-se por
aplicar o erro novo da ATD em todas as configurações, logo penalizando algumas
configurações para a solução de localização de descargas atmosféricas. Dessa maneira, esta
nova distribuição de erros de localização pode ser utilizada como a acurácia máxima média do
sistema ZEUS sobre a região do Brasil.
113
CAPÍTULO 6
6.1 REFERÊNCIAS BIBLIOGRÁFICAS
AARONS, J., 1982. Global Morphology of Ionospheric Scintillations. Proc. IEEE, v.70 AL´PERT, Y. L; FLIGEL´.D. S, 1970. Propagation of ELF and VLF Waves near the Earth, consultants bureau, New York and London ANAGNOSTOU, E.N., AND T. CHRONIS, 2004. The worth of long-range lightning observations on overland satellite rainfall estimation, Book Chapter, Kluwer Academic Publishers (in review). BARR, R., LLANWYN JONES, D., RODGER, C.J. 2000. ELF and VLF radio waves, Journal of Atmospheric and Solar-Terrestrial Physics, 62, 1689-1718. BENETTI, C.A. A; LEITE, E.A; GARCIA, S.A.M; ASSUNÇÃO, L.A.R; FILHO, A.C; REIS, R.J. 2004. Ridat – Rede Integrada de Detecção de Descargas Atmosféricas no Brasil: Situação Atual, Aplicações e Perspectivas, XI Congr. Bras. Met., 1971-1979, Rio de Janeiro, RJ. BEVINGTON, P.R., 1969. Data Reduction and Error Analysis and Physical Sciences. McGraw Hill, New York. BOCCIPPIO, D.J., DRISCOLL, H.T., KOSHAK, W.J., BLAKESLEE. R.J., BOECK, W.L., MACH, D.A., BUECHLER, D.E., CHRISTIAN, H.J., GOODMAN, S.J., 2000. The Optical Transient Detector (OTD): Instrument Characteristics and Cross-Sensor Validation, Journal of Atmospheric and Oceanic Technology, Vol. 17, No. 4, 441–458. BOCCIPPIO, D.J., HECKMAN, S., GOODMAN, S.J., 2000. A Diagnostic Analysis of the Kennedy Space Center LDAR Network 1.Data Characteristics. Journal of Geophysical Research, 106, 4769-4786. BOCZKO, R., 1984. Conceitos de Astronomia. Editora Edgard Blücher Ltda. BOWHILL, S.A., 1970. Ionospheric Irregularities Causing Random Fading of Very Low Frequencies, Journal of Atmospheric and Solar-Terrestrial Physics, 11, 91-101. BUDDEN, K., 1951. The Propagation of a Radio-Atmsopheric. Phil.Mag. 7, 42, 1-19. CARPENTER, D. L., K. STONE, J. C. SIREN, AND T. L. CRYSTAL, 1972. Magnetospheric electric fields deduced from drifting whistler paths, Journal of Geophysical Research,, 77, 2819.
114
CHALLINOR, R. A., 1967. The phase velocity and attenuation of audio-frequency electro-magnetic waves from simultaneous observations of atmospherics at two-spaced station, Journal of Atmospheric and Terrestrial Physic. 29, 803 – 810.
CHRONIS, T., E.N., ANAGNOSTOU., 2003. Error Analysis for a Long-Range Lightning Monitoring Network of Ground-Based Receivers in Europe. Journal of Geophysical Research-Atmospheres, 108(D24), 4779.
CRHISTIAN, H., BLAKESLLE, R., GOODMAN, S., 1992. Lightning Imaging Sensor for the Earth Observing System, Tech. Rep. TM-4350, NASA.
CRHISTIAN, H., BLAKESLLE, R., GOODMAN, S., DRISCOLL, K., MACH, D., BUECHLER, D., 1996.The Optical Transient Detector (OTD), proceedings of 10th International Conference on Atmospheric Electricity, ICAE, Osaka, Japan.
CRHISTIAN, H., BLAKESLLE, R., GOODMAN, S., DRISCOLL, K., MACH, D., BUECHLER, D., 1999. The Lightning Imaging Sensor, proceedings of 11th International Conference on Atmospheric Electricity, ICAE, Gutersville, Ala.
CUMMER, S. A., 1997. Lightning and Ionospheric Remote Sensing Using VLF/ELF Radio Atmospherics, Thesis submitted to the department of electrical engineering of Stanford University, 1 – 65. CUMMINS, K. L., M. J. NURPHY., E. A. BARDO., W. L. HISCOX., R. B. PYLE., A. E. PIFER., 1998. A Combined TOA/MDF Technology upgrade of the U.S. National Lightning Detection Network. Geophysical Research. 103, D8, 9035-9044. DAVIES, K., 1990.Ionospheric Radio. London: Peter Peregrinus. DOWDEN, R., L; BRUNDELL, J., B & RODGER, C., J., 2002. VLF lightning location by time of group arrival (TOGA) at multiple site, Journal of Atmospheric and Terrestrial Physic 64, 817-830. ERIN H. LAY, ROBERT H. HOLZWORTH, CRAIG J. RODGER, JEREMY N. THOMAS, OSMAR PINTO JR., AND RICHARD L. DOWDEN, 2004. WWLL global lightning detection system: Regional validation study in Brazil, Geophysical Research Letters, vol.31, L03102, doi:10.1029/2003GL018882. GLOBAL ATMOSPHERICS (GAI). 1995. Technical manual for LPATS remote receiver series III. Tucson. GLOBAL ATMOSPHERICS (GAI). 1998. Lightning Position & Tracking Sensor IV (LPATS IV): installation, operation, and maintenance manual. Tucson. HOLTER, Ø., EGELAND, A., OMHOLT, A., 1973. Cosmical Geophysics, Universitetsforlaget, Oslo, Norway, 13, 267-281. HULL, J.C., 1997. Options, Futures, and Other Derivatives. Upper Saddle River: Prentice Hall.
115
JAMESINA J. S., ALLEN, 2004.. Efficient Modeling of Impulsive ELF Antipodal Propagation About the Earth Sphere Using an Optimized Two-Dimensional Geodesic FDTD Grid, IEEE ANTENNAS AND WIRELESS PROPAGATION LETTERS, vol. 3. KAROUS, M. & HJELT, S.E., 1983. Linear Filtering of VLF Dip-Angle Measurements. Geophysical Prospecting, 31: 782 – 794. KENNEDY, G., 1970. Electronic Communication Systems. 2.ed. New York: MacGraw-Hill. LEE, A.C.L. 1986.An experimental study of the remote location lightning flashes using a VLF arrival time difference technique, Quart. J. Roy. Meteor. Soc., 112, 203 – 229.
LEE, A.C.L. 1989. The Limiting Accuracy of Long Wavelength Lightning Flash Location, American Meteorological Society, 6, 43 – 49. LENNON, C. AND L. MAIER, 1991.Lightning mapping system. NASA CP-3106, Vol II, International Aerospace and ground Reference on lightning and Static Electricity. pp. 89-1 to 89-10. MACGORMAN, D. R., RUST, W.D. 1998. The Electrical Nature of Storms, New York, Oxford University Press. MALAYS S., SLATER J., SMITH R.W., KUNZ L.E., KENYON S.C. 1997."Refinements to the World Geodetic System 1984", Proceedings of the 10th International Technical meeting of the Satellite Division of the Institute of Navigation, September 16-19, Kansas City, Missouri, USA. MARSHALL, T.C. AND W.D. RUST, 1991. Electric field soundings through thunderstorms, Journal of Geophysical Research., 96, 22297-22306. MARSHALL, B.J.P., J.LATHAM AND C.P.R. SAUNDERS, 1978. A laboratory study of charge transfer accompanying the collision of ice crystals with a simulated hailstone, Quart. J. Roy. Meteor. Soc., 104, 163-178. MASON, J; MASON, N, 2003. The physics of a thunderstorm, European Journal of Physics, 24. MAZUR, V; WILLIANS, E; BOLDI, R; MAIER, L; PROCTOR, D.E. 1997. Initial Comparison of Lightning Mapping With Operational Time-Of-Arrival and Interferometric System. Journal of Geophysical Research, vol.103, NO.D10, 11,071-11,085. MEEK, J. M., 1939. The Mechanism of the Lightning Discharge, The American Physical Society. MINISTÉRIO DAS COMUNICAÇÕES. PORTARIA Nº. 25, DE 24 DE FEVEREIRO DE 1983 Publicada no D.O.U. em 28/03/83, homepage: www.sulradio.com.br/legislacao/ normas/OD%20-%20Portaria-MC%2025%20de%201983.pdf
116
MORALES, C.A., 2001.Continuous Long-Range Thunderstorm Monitoring by Ground Based VLF Receivers: Experimental Calibration and Validation. Part I of Ph.D. thesis. MORALES, C.A., 2001. Continuous Long-Range Thunderstorm Monitoring by Ground Based VLF Receivers: Cloud-to-Ground Detection Efficiency and IC Detection. Part II of Ph.D. thesis. MORALES, C.A; PINTO, O; ANAGNOSTOU, E; HOLZWORTH, R; DOWDEN, R. 2004. Lightning Measurements Over Brazil: Assement of Different Lightning Detection Systems, Ground. NACCARATO, K.P.; PINTO JR, O.; PINTO, I. R. C. A, 2004a. . Application of a detection efficiency model to correct cloud-to-ground flash density maps in Southeastern Brazil. Proceedings of the 18th International Lightning Detection Conference. Helsinki, Vaisala. NACCARATO, K.P.; PINTO JR, O.; PINTO, I. R. C., A, 2004b., A new approach a detection efficiency model for the RINDAT lightning detection network Proceedings of the International Conference on Grounding and Earthing & International Conference on Lightning Physics and Effects, Belo Horizonte, Brazil, 7-11, November. NORTON, K.A,. 1936. The Propagation of radio waves over the surface of the earth and in the upper atmosphere. Proc. IRE, v.24, n.10, Oct. ORSINI, L. Q. 1950. A Ionosfera e a Previsão das Rádio – Comunicações, dep. De física, Univ. de São Paulo, 1 – 71. ORVILLE, R.E., HENDERSON, R.W. 1986. Global Distribuition of Midnight Lightning: September 1977 to August 1978, Monthly Weather Review vol.114, 2640-2653. PINTO, I. R. C. A., PINTO JR, O., ROCHA, R. M. L., DINIZ, J. H., CARVALHO, A. M., C. FILHO, A. 1999. Cloud-to-ground lightning flashes in the southeastern Brazil in 1993, 2, Time variations and flash characteristics. Journal of Geophysical Research, v.104, n. D24, p. 31,381-31,388, Dec., 1999 PINTO, JR. O., GARCIA, S. A. M,. 2004. The Brazilian Integrated Lightning Detection Network – RINDAT the third largest network in the world, II Workshop RINDAT – GROUND. PINTO, JR. O,. 2005. A Arte da Guerra Contra os Raios, Editora, Oficina de textos. PROCTOR, D.E. 1971. A hyperbolic system for obtaining VHF radio pictures of lightning. Journal of Geophysical Research, 76, 1478-89. PRUPPACHER, H.R., J.D.KLETT. 1978. Microphysics of Clouds and Precipitation, D. Reidel Publishing Co., Dordrecht. RAMO, S., WHINNERY, J. R., VAN DUZER, T., 1994. Fields and Waves in Communication Electronics. 3. ed. New York: John Wiley.
117
REITZ, J.R., MILFORD, F.J., CHRISTY, R.W. 1988. Fundamentos da Teoria Eletromagnética, editora campus, São Paulo. REYNOLDS, S.E., M. BROOK, AND M.F. GOURLEY, 1957. Thunderstorms charge separation, Journal Meteorological, 14, 426-436. RIBEIRO, J.A. J. 2004. Propagação das Ondas Eletromagnéticas, São Paulo: Editora Érica. RICHARD, P., DELANNOY, A., LABAUNE, G., LAROCHE, P., 1986. Results of Spatial and temporal characterization of the VHF-UHF radiation of lightning. Journal of Geophysical Research, 91, 1248-60. RYCROFT, M.J., ISRAELSSON, S., PRICE, C. 2000. The Global Atmospheric Electric Circuit, Solar Activity and Climate Change, Journal of Atmospheric and Solar terrestrial Physics 62 ,1563 – 1576 RODGER, C. J., AND R. L. DOWDEN, 2003. Realtime global mapping of lightning using widely spaced VLF receivers, XXIII General Assembly of the International Union of Geodesy and Geophysics, Abstracts Week B, Pg B. 193, IUGG, Japan, 2003 RODGER, C.J; BRUNDELL, J.B; DOWDEN, R.L; THOMSON,N.R 2004. Location Accuracy of Long Distance VLF Lightning Location Network, Annales Geophysicae 22, 747-758. RUSSEL, C.T., SNARE, R.C., MEANS, J.D., PIERCE, D., DEARBORN, D., LARSON, M., BARR, G., LE, G, 1995. The GGS/polar Magnetic Fields Investigations. Space Science Review v.71. SMITH, M, D; GREFENSTETTE, BRIAN W, 2006. Terrestrial Gamma-ray flashes: status and prospects, Date Received: September 21, 2005 ,Abstract Submission Form 2006 National Radio Science Meeting SAUNDERS, S.R.. 1999. Antennas and Propagation for Wireless Communication Systems. New York, John Wiley. SUSZCYNSKY, D.M.; KIRKLAND, M.W.; JACOBSON, A.R.; FRANZ, R.C.; KNOX, S.O.; GUILLEN, J.L.L.; GREEN, J.L., 2000. FORTE Observations of Simultaneous VHF and Optical Emissions from Lightning: Basic Phenomenology - LA-UR-99-1108, Journal of Geophysical Research-Atmospheres; v.105, no.D2, p.2191-2201. TAYLOR, W.L., 1960. Daytime attenuation rates in the very low frequency band using atmospherics, Journal of Research of the National Bureau of Standards 64D,349-355. TIPLER, P, A, 1991, 1982, 1976. Physics for Scientists and Engineers, third edition Extended version Copyright by Worth Publishers, Inc TONKS, L., LANGMUIR, I., 1961. A General Theory of the Plasma of an arc. Physical Review v.43.
118
THOMAS O. BRITT, CARL L. LENNON, AND LAUNA M. MAIER,. 1999. Lightning Detection and Ranging System, Kennedy Space Center, Refer to KSC- 11785, volume and number of this NASA Tech Briefs issue. THOMSON, E. M.; GALIB, M. A.; UMAN, M. A.; BEASLEY, W. H.; MASTER, M.1984. J. Some features of stroke occurrence in Florida lightning flashes. Journal of Geophysical Research, v. 89, n. D3, p. 4910-4916, June. UMAN, M. A. 1985. Lightning Return Stroke Electric and Magnetic Fields, Journal of Geophysical Research. 90, D4, 6121 – 6130. UMAN, M. A. 1987. The Lightning Discharge, Academic Press, 377. UMAN, M. A. 1971. All About Lightning, ed: Dover Publications. VONNEGUT, B., C.B.MOORE, R.G.SERNONIN, J.W.BULLOK, D.W.STAGGS, and W.E.BRADLEY, 1962. Effect of atmospheric space charge on initial electrification of cumulus clouds, Journal Geophysics Research., 67, 3909-3921. WAIT, J. R,. 1961. Terrestrial propagation of very-low-frequency radio waves: a theoretical investigation, Journal. Res. Nat. Bureau Stand, vol. 64D, p. 153, 1960. WAIT, J.R. A diffraction Theory for LF Sky-Wave Propagation, Journal of Geophysical Research 66, No.6, 1713-1724. WARWICK, J.W., HAYENGA, C.O., BROSHAHAN, J.W., 1979. Interferometric directions of lightning sources at 34 MHz. Journal of Geophysical Research, 84, 2457-63. WILLIAMS, E.R. 1998. The Electrification of Thunderstorms, Scientific American, pp. 48 – 65.
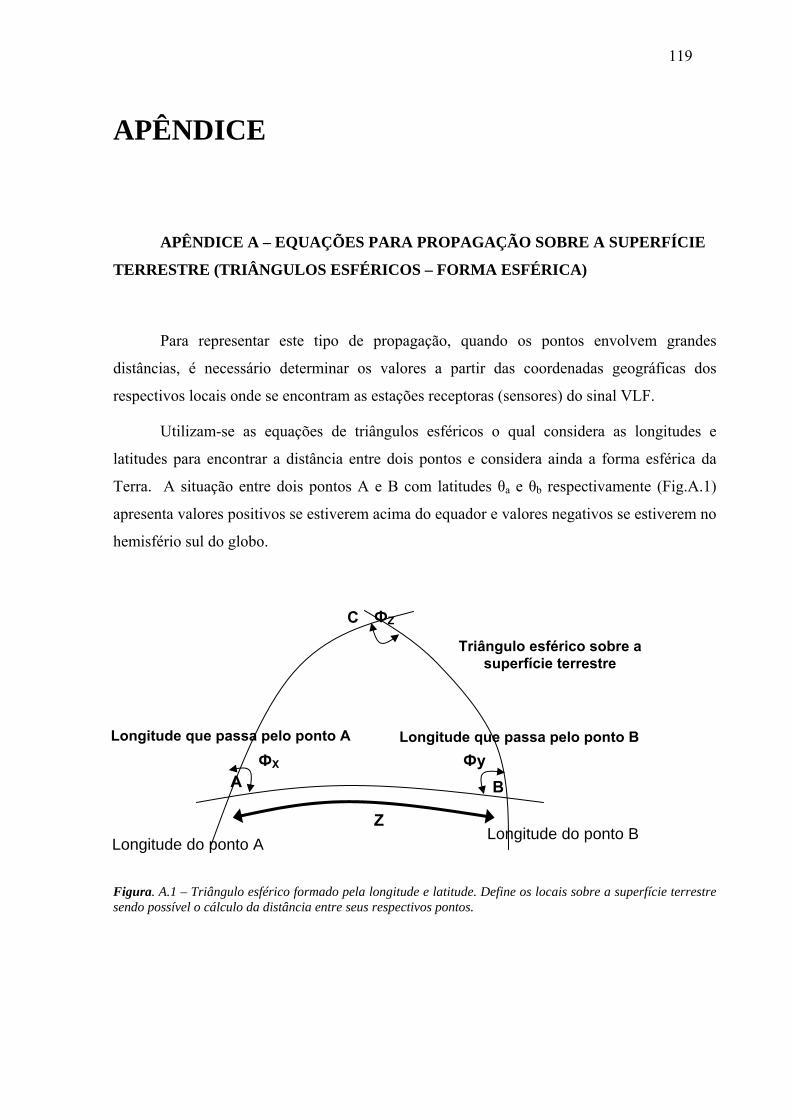
119
APÊNDICE
APÊNDICE A – EQUAÇÕES PARA PROPAGAÇÃO SOBRE A SUPERFÍCIE
TERRESTRE (TRIÂNGULOS ESFÉRICOS – FORMA ESFÉRICA)
Para representar este tipo de propagação, quando os pontos envolvem grandes
distâncias, é necessário determinar os valores a partir das coordenadas geográficas dos
respectivos locais onde se encontram as estações receptoras (sensores) do sinal VLF.
Utilizam-se as equações de triângulos esféricos o qual considera as longitudes e
latitudes para encontrar a distância entre dois pontos e considera ainda a forma esférica da
Terra. A situação entre dois pontos A e B com latitudes θa e θb respectivamente (Fig.A.1)
apresenta valores positivos se estiverem acima do equador e valores negativos se estiverem no
hemisfério sul do globo.
Figura. A.1 – Triângulo esférico formado pela longitude e latitude. Define os locais sobre a superfície terrestre sendo possível o cálculo da distância entre seus respectivos pontos.
C
B A ФX Фy
ФZ
Z
Triângulo esférico sobre a superfície terrestre
Longitude que passa pelo ponto A Longitude que passa pelo ponto B
Longitude do ponto A Longitude do ponto B
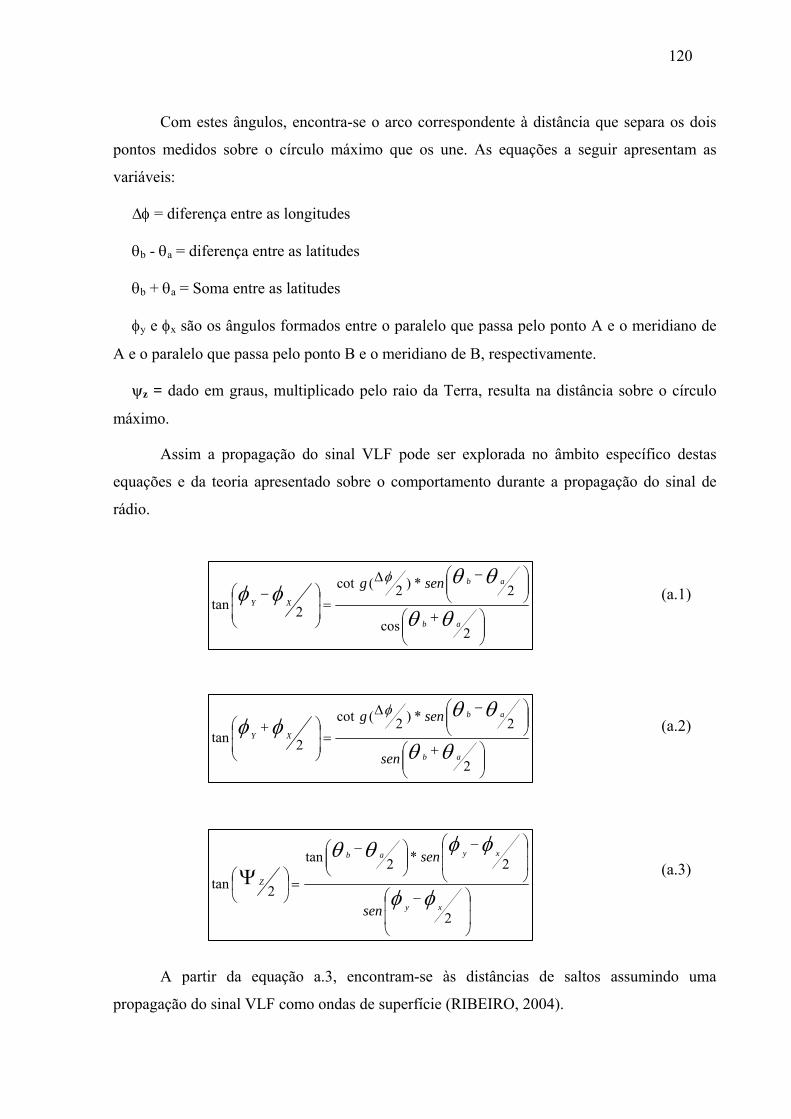
120
Com estes ângulos, encontra-se o arco correspondente à distância que separa os dois
pontos medidos sobre o círculo máximo que os une. As equações a seguir apresentam as
variáveis:
∆φ = diferença entre as longitudes
θb - θa = diferença entre as latitudes
θb + θa = Soma entre as latitudes
φy e φx são os ângulos formados entre o paralelo que passa pelo ponto A e o meridiano de
A e o paralelo que passa pelo ponto B e o meridiano de B, respectivamente.
ψz = dado em graus, multiplicado pelo raio da Terra, resulta na distância sobre o círculo
máximo.
Assim a propagação do sinal VLF pode ser explorada no âmbito específico destas
equações e da teoria apresentado sobre o comportamento durante a propagação do sinal de
rádio.
A partir da equação a.3, encontram-se às distâncias de saltos assumindo uma
propagação do sinal VLF como ondas de superfície (RIBEIRO, 2004).
⎟⎟⎠
⎞⎜⎜⎝
⎛ +
⎟⎟⎠
⎞⎜⎜⎝
⎛ −∆
=⎟⎟⎠
⎞⎜⎜⎝
⎛ −
2cos
2*)2(cot
2tanθθ
θθφφ
φ
ab
ab
XY
seng
⎟⎟⎠
⎞⎜⎜⎝
⎛ +
⎟⎟⎠
⎞⎜⎜⎝
⎛ −∆
=⎟⎟⎠
⎞⎜⎜⎝
⎛ +
2
2*)2(cot
2tanθθ
θθφφ
φ
ab
ab
XY
sen
seng
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −⎟⎟⎠
⎞⎜⎜⎝
⎛ −
=⎟⎠
⎞⎜⎝
⎛Ψ
2
2*2tan
2tanφφ
φφθθ
xy
xyab
Z
sen
sen
(a.1)
(a.2)
(a.3)
121
APÊNDICE A – EQUAÇÕES PARA PROPAGAÇÃO SOBRE A SUPERFÍCIE
TERRESTRE (TRIÂNGULOS ESFÉRICOS – FORMA GEÓIDE)
Para este cálculo usamos um modelo geodésico que determina a distância entre dois
pontos sobre superfície terrestre considerando a forma geóide da Terra.
O modelo geodésico swg84 contribui de forma significativa para o propósito deste.
Em meados dos anos 60 surgiu o primeiro Sistema Geodésico Mundial - WGS60 “World
Geodetic System” 1960. Outros sistemas foram elaborados através de algumas modificações
em 1966, 1972 e 1984, com os respectivos nomes de WGS 66, WGS 72 e WGS 84. Porém em
1996 a NASA (National Aeronautics and Space Administration) e a Universidade do Estado
de Ohio, desenvolveram um Modelo Global para o campo gravimétrico da Terra, designado
como Modelo Gravitacional da Terra 1996 (EGM96). Assim o modelo geodésico WGS 84 é
um sistema tridimensional de coordenadas simples que consideram o Modelo Global para o
campo gravimétrico da Terra (MALAYS et.al, 1997).
APÊNDICE A – EQUAÇÕES PARA PROPAGAÇÃO ATRAVÉS DE SALTOS
IONOSFÉRICOS
Para calcularmos a propagação de ondas de céu sobre o globo, é necessária a utilização
de coordenadas geodésicas (equações de triângulos esféricos) e das equações de saltos
ionosféricos.
A altura virtual (h’) de uma camada ionosférica é a altitude a que deveria existir um
plano refletor perfeito para produzir um efeito semelhante sobre a trajetória das ondas
eletromagnéticas.
À distância em que o sinal de VLF percorre ao refletir (ou refratar) na ionosfera até
retornar a superfície terrestre é conhecida como distância de salto. Para saltos curtos podemos
considerar a superfície terrestre como um plano admitindo propagação por ondas de
superfície, porém, para saltos maiores (acima de 400 km) deve-se considerar o percurso do
sinal pela ionosfera e a forma esférica da Terra.
Para caracterizar com precisão o percurso do sinal eletromagnético via ionosfera é
necessário determinar a relação entre a distância de salto (D), a altura virtual da camada (h’)
que admitimos ter valores de 70 km durante o dia e 90 km durante a noite e o ângulo de
122
⎟⎠⎞
⎜⎝⎛=
saltosDkmdistância
*2_
( )sssaltosDciadisRT
**tan ⎟⎟⎠
⎞⎜⎜⎝
⎛=
elevação (∆), considerando a excentricidade da Terra. O ângulo θ descreve um arco que é a
metade do salto, θ = d/2Rterra. Onde (d) é à distância que a onda percorre pela superfície da
Terra utilizando as equações anteriores.
Utilizando algoritmos que consideram os cálculos para o nascer e pôr do Sol, altura da
ionosfera e a localização do ponto sobre a superfície onde a altura da ionosfera é máxima, são
possíveis inferir distâncias entre dois pontos (distância_km) como função do número de saltos
na ionosfera.
O valor de (saltos) inicialmente é zero e o valor de RT = 6378.140 km é o raio da
Terra. Desta forma obtem-se a equação como função do número de saltos que podem ser
múltiplos (ss), ou seja, maior que 1. Esta equação descreve a quantidade de saltos necessários
para que a onda de céu sofra propagação na ionosfera e encontre o sensor de VLF à
determinada distância:
A máxima distância percorrida pela onda é função da altura virtual, do ângulo de
elevação, do número de saltos e do arco de grande círculo. Portanto, (D) representa a distância
entre dois pontos para uma onda que se propaga via ionosfera. Quanto menor o ângulo de
elevação, maior será à distância percorrido pela onda, contudo maior será sua atenuação na
ionosfera.
O ângulo de elevação mínimo adotado para os cálculos é de 12.8O, portanto, acima
deste ângulo os saltos são calculados pelo algoritmo que se utiliza primeiramente do valor da
altura da ionosfera (H) para aquele dado dia e hora, depois acrescenta os números de saltos
(ss).
As equações que descrevem os procedimentos para o cálculo do ângulo de elevação
são as equações 1.6, 1.7 e 1.8:
(a.4)
(a.5)
123
)1sin(sin2 −⎟⎟⎠
⎞⎜⎜⎝
⎛=∆
RR
T
T
)1cos(*_coscos1 ⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟⎠
⎞⎜⎜⎝
⎛ +=∆
RRR
TT
T ionodistH
90)180/(*21cos −⎟⎠⎞
⎜⎝⎛∆∆
=∆ πa
O valor da distância entre um ponto na superfície terrestre e a base na ionosfera é representado por dist_iono.
(a.6)
(a.7)
(a.8)
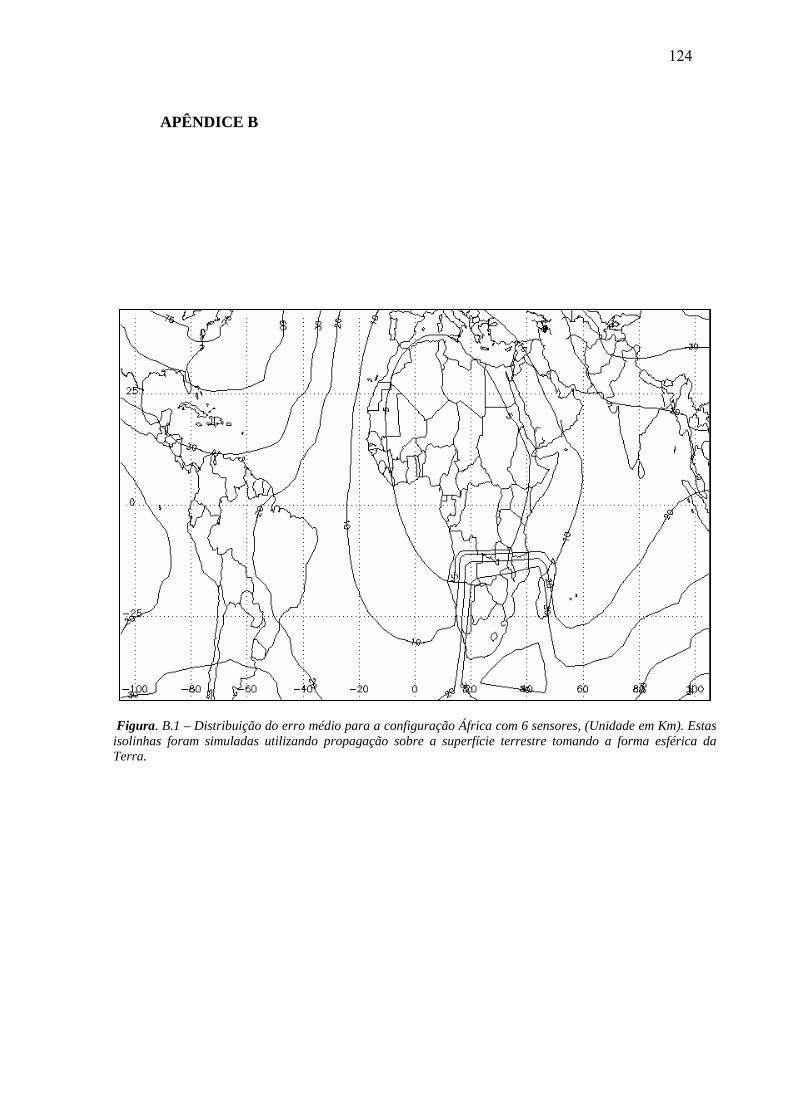
124
APÊNDICE B
Figura. B.1 – Distribuição do erro médio para a configuração África com 6 sensores, (Unidade em Km). Estas isolinhas foram simuladas utilizando propagação sobre a superfície terrestre tomando a forma esférica da Terra.
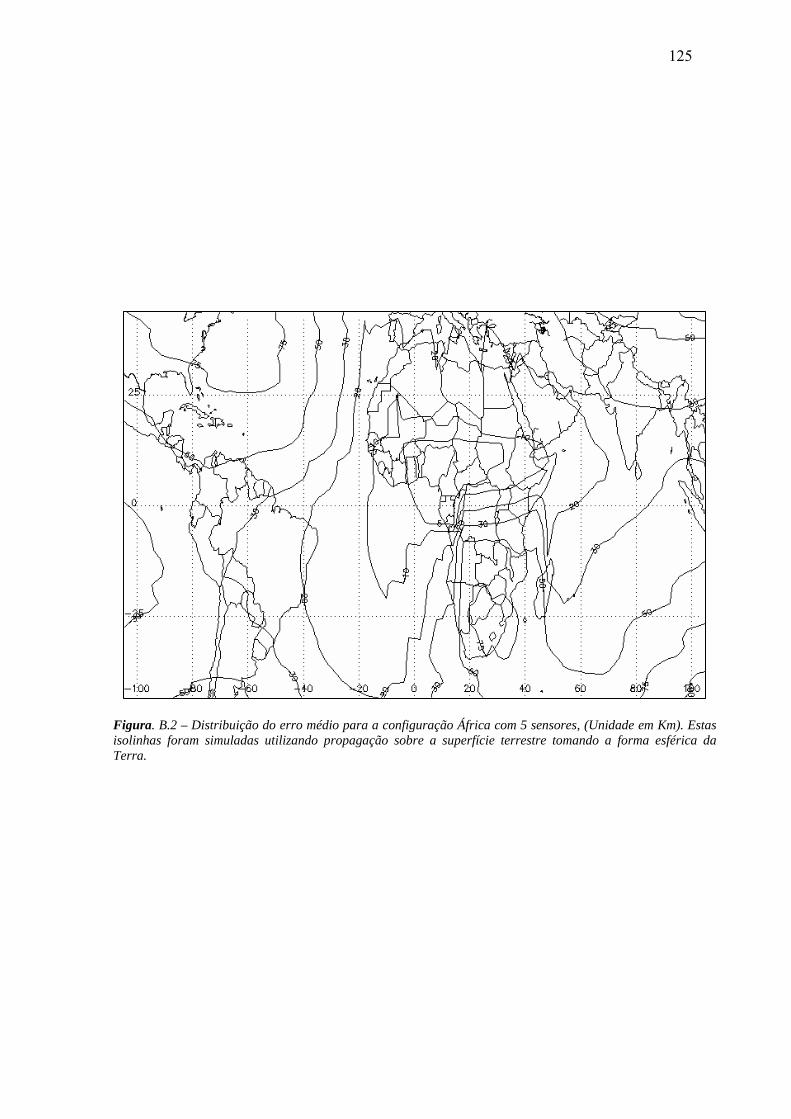
125
Figura. B.2 – Distribuição do erro médio para a configuração África com 5 sensores, (Unidade em Km). Estas isolinhas foram simuladas utilizando propagação sobre a superfície terrestre tomando a forma esférica da Terra.
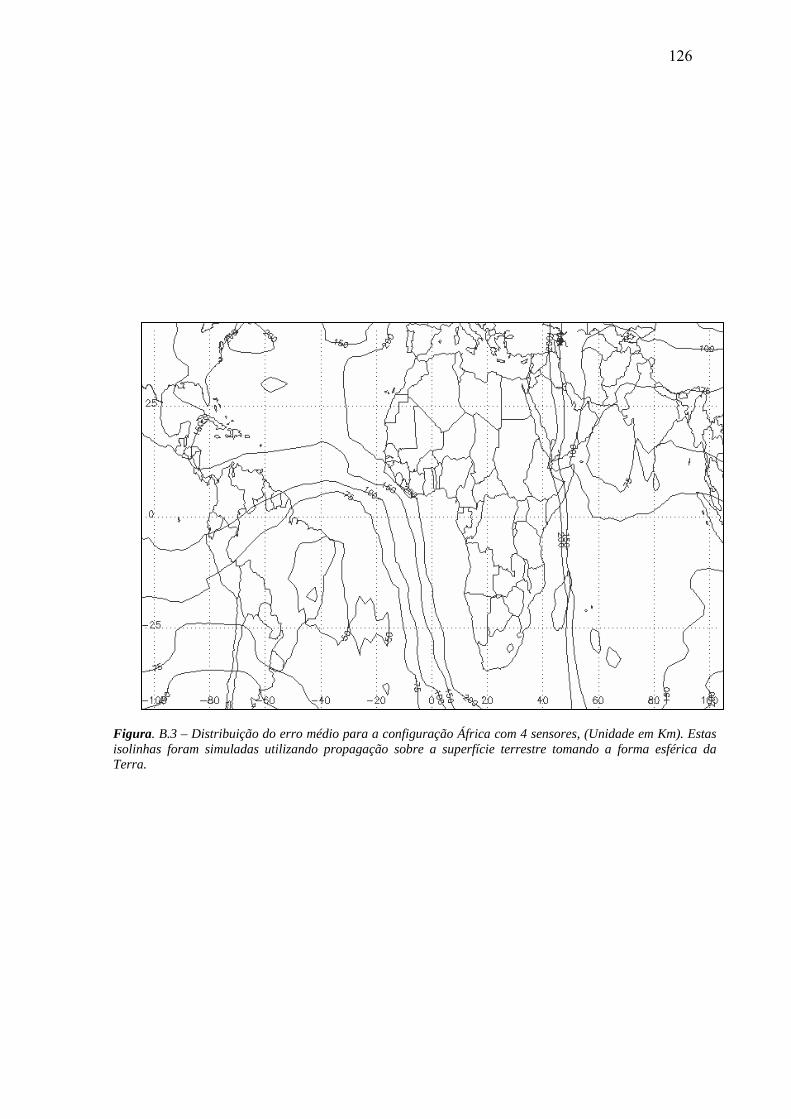
126
Figura. B.3 – Distribuição do erro médio para a configuração África com 4 sensores, (Unidade em Km). Estas isolinhas foram simuladas utilizando propagação sobre a superfície terrestre tomando a forma esférica da Terra.
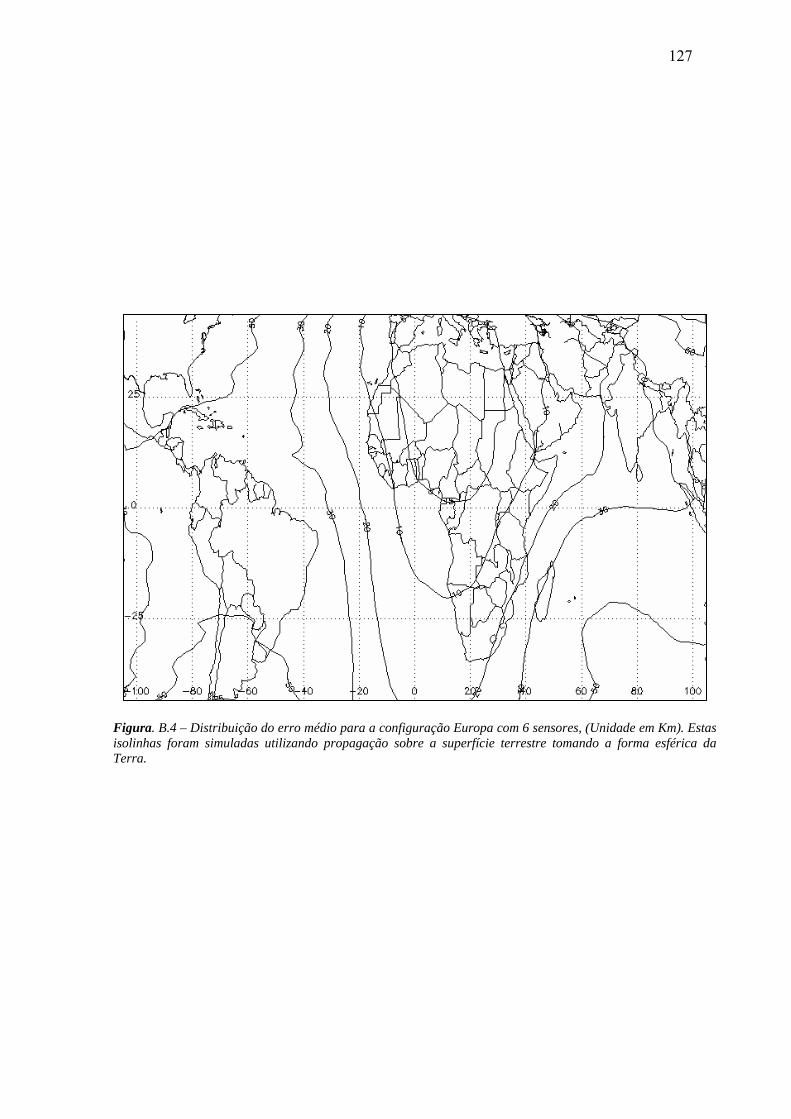
127
Figura. B.4 – Distribuição do erro médio para a configuração Europa com 6 sensores, (Unidade em Km). Estas isolinhas foram simuladas utilizando propagação sobre a superfície terrestre tomando a forma esférica da Terra.
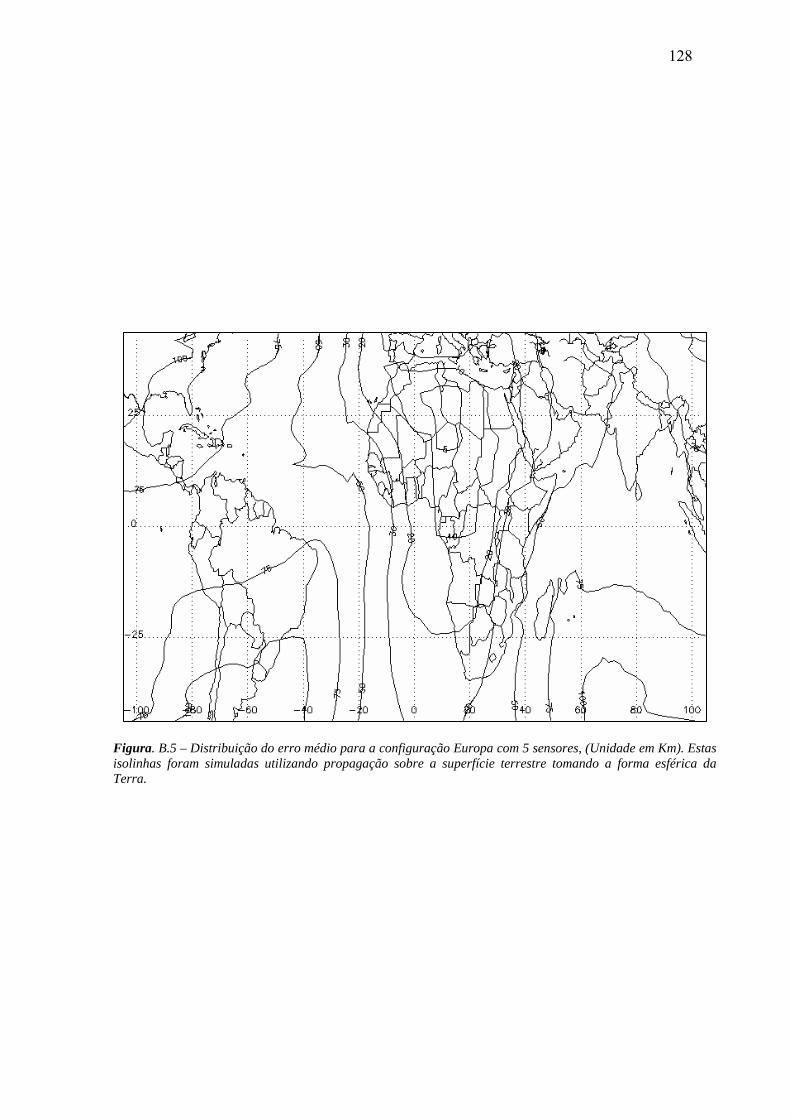
128
Figura. B.5 – Distribuição do erro médio para a configuração Europa com 5 sensores, (Unidade em Km). Estas isolinhas foram simuladas utilizando propagação sobre a superfície terrestre tomando a forma esférica da Terra.
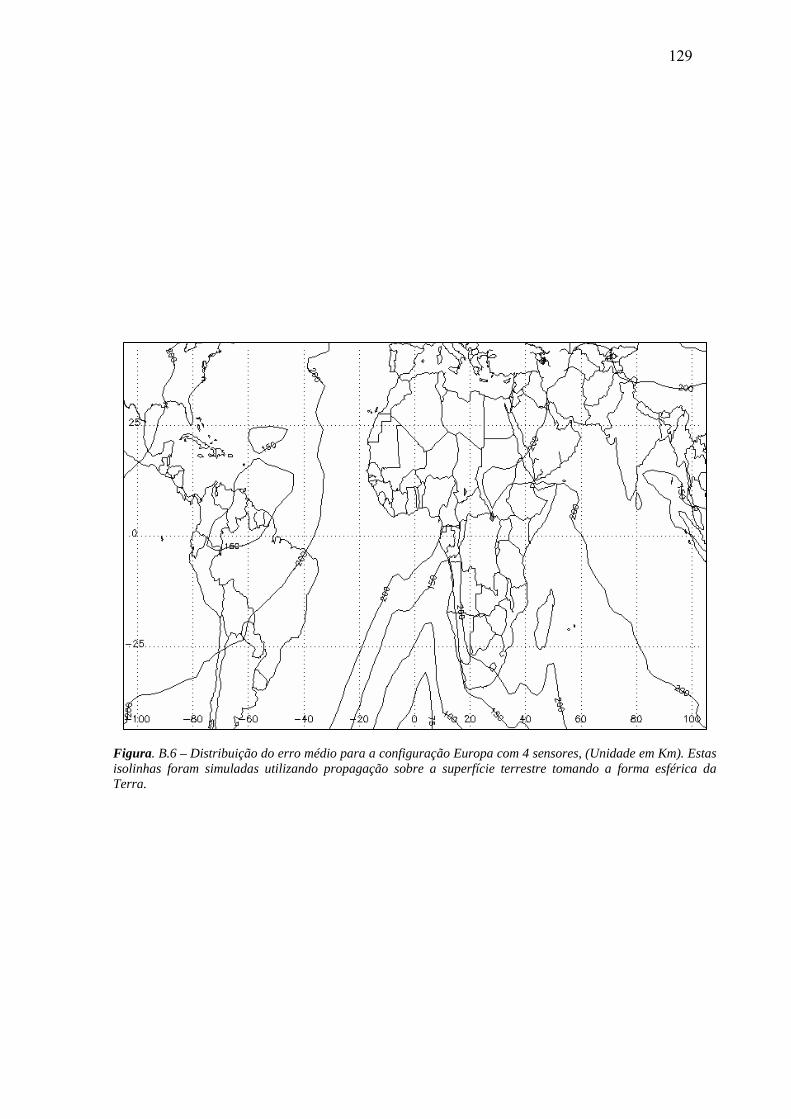
129
Figura. B.6 – Distribuição do erro médio para a configuração Europa com 4 sensores, (Unidade em Km). Estas isolinhas foram simuladas utilizando propagação sobre a superfície terrestre tomando a forma esférica da Terra.
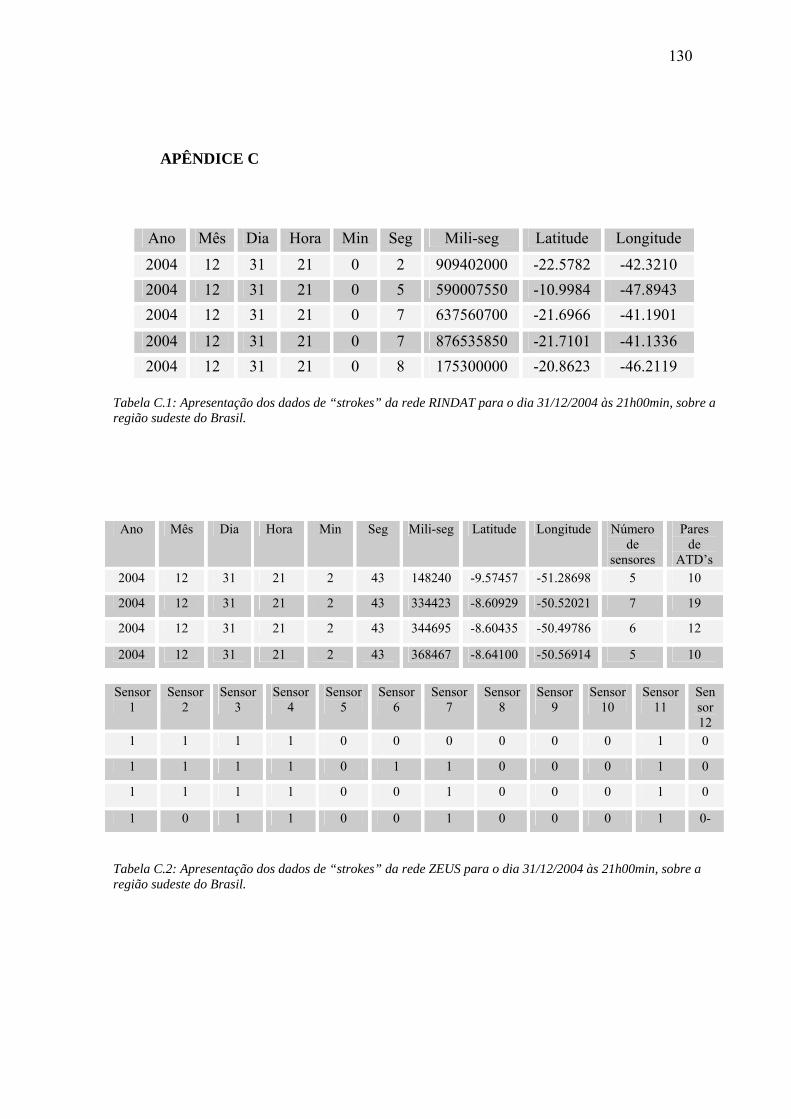
130
APÊNDICE C
Ano Mês Dia Hora Min Seg Mili-seg Latitude Longitude
2004 12 31 21 0 2 909402000 -22.5782 -42.3210 2004 12 31 21 0 5 590007550 -10.9984 -47.8943 2004 12 31 21 0 7 637560700 -21.6966 -41.1901
2004 12 31 21 0 7 876535850 -21.7101 -41.1336 2004 12 31 21 0 8 175300000 -20.8623 -46.2119
Tabela C.1: Apresentação dos dados de “strokes” da rede RINDAT para o dia 31/12/2004 às 21h00min, sobre a região sudeste do Brasil.
Ano Mês Dia Hora Min Seg Mili-seg Latitude Longitude Número de
sensores
Pares de
ATD’s 2004 12 31 21 2 43 148240 -9.57457 -51.28698 5 10
2004 12 31 21 2 43 334423 -8.60929 -50.52021 7 19
2004 12 31 21 2 43 344695 -8.60435 -50.49786 6 12
2004 12 31 21 2 43 368467 -8.64100 -50.56914 5 10
Sensor
1 Sensor
2 Sensor
3 Sensor
4 Sensor
5 Sensor
6 Sensor
7 Sensor
8 Sensor
9 Sensor
10 Sensor
11 Sensor 12
1 1 1 1 0 0 0 0 0 0 1 0
1 1 1 1 0 1 1 0 0 0 1 0
1 1 1 1 0 0 1 0 0 0 1 0
1 0 1 1 0 0 1 0 0 0 1 0-
Tabela C.2: Apresentação dos dados de “strokes” da rede ZEUS para o dia 31/12/2004 às 21h00min, sobre a região sudeste do Brasil.
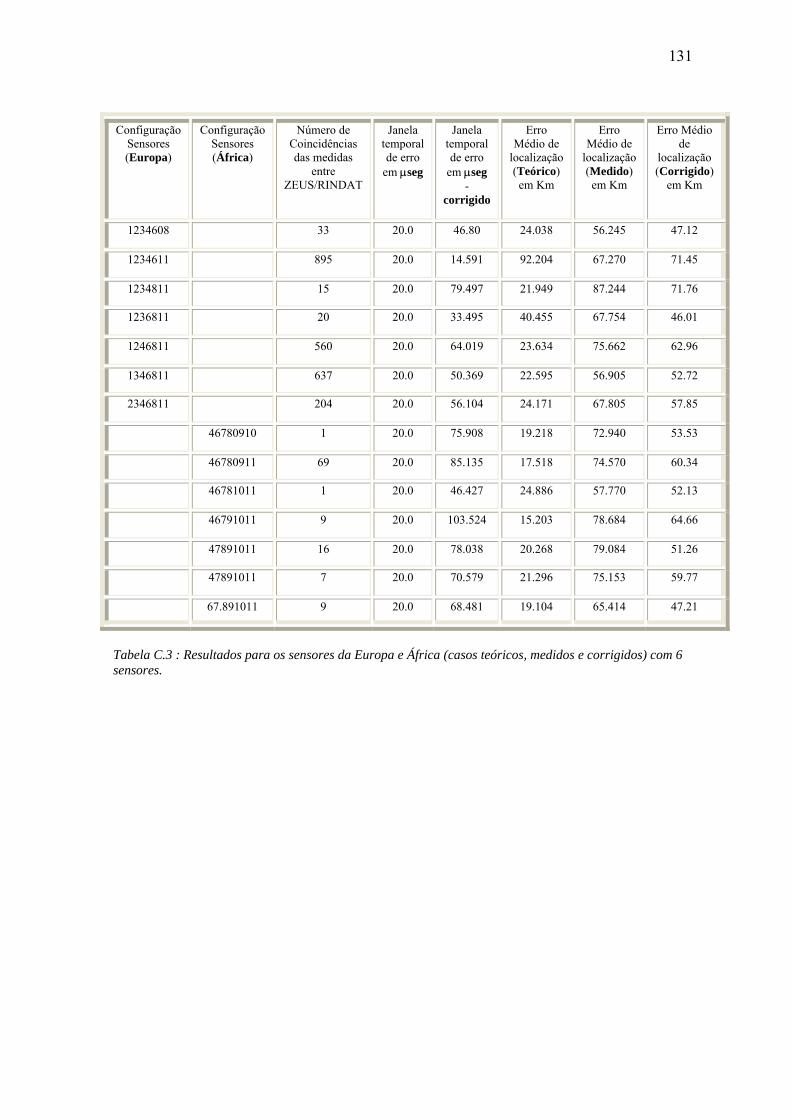
131
Configuração Sensores (Europa)
Configuração Sensores (África)
Número de Coincidências das medidas
entre ZEUS/RINDAT
Janela temporal de erro
em µseg
Janela temporal de erro
em µseg -
corrigido
Erro Médio de
localização (Teórico) em Km
Erro Médio de
localização (Medido) em Km
Erro Médio de
localização (Corrigido)
em Km
1234608 33 20.0 46.80 24.038 56.245 47.12
1234611 895 20.0 14.591 92.204 67.270 71.45
1234811 15 20.0 79.497 21.949 87.244 71.76
1236811 20 20.0 33.495 40.455 67.754 46.01
1246811 560 20.0 64.019 23.634 75.662 62.96
1346811 637 20.0 50.369 22.595 56.905 52.72
2346811 204 20.0 56.104 24.171 67.805 57.85
46780910 1 20.0 75.908 19.218 72.940 53.53
46780911 69 20.0 85.135 17.518 74.570 60.34
46781011 1 20.0 46.427 24.886 57.770 52.13
46791011 9 20.0 103.524 15.203 78.684 64.66
47891011 16 20.0 78.038 20.268 79.084 51.26
47891011 7 20.0 70.579 21.296 75.153 59.77
67.891011 9 20.0 68.481 19.104 65.414 47.21
Tabela C.3 : Resultados para os sensores da Europa e África (casos teóricos, medidos e corrigidos) com 6 sensores.
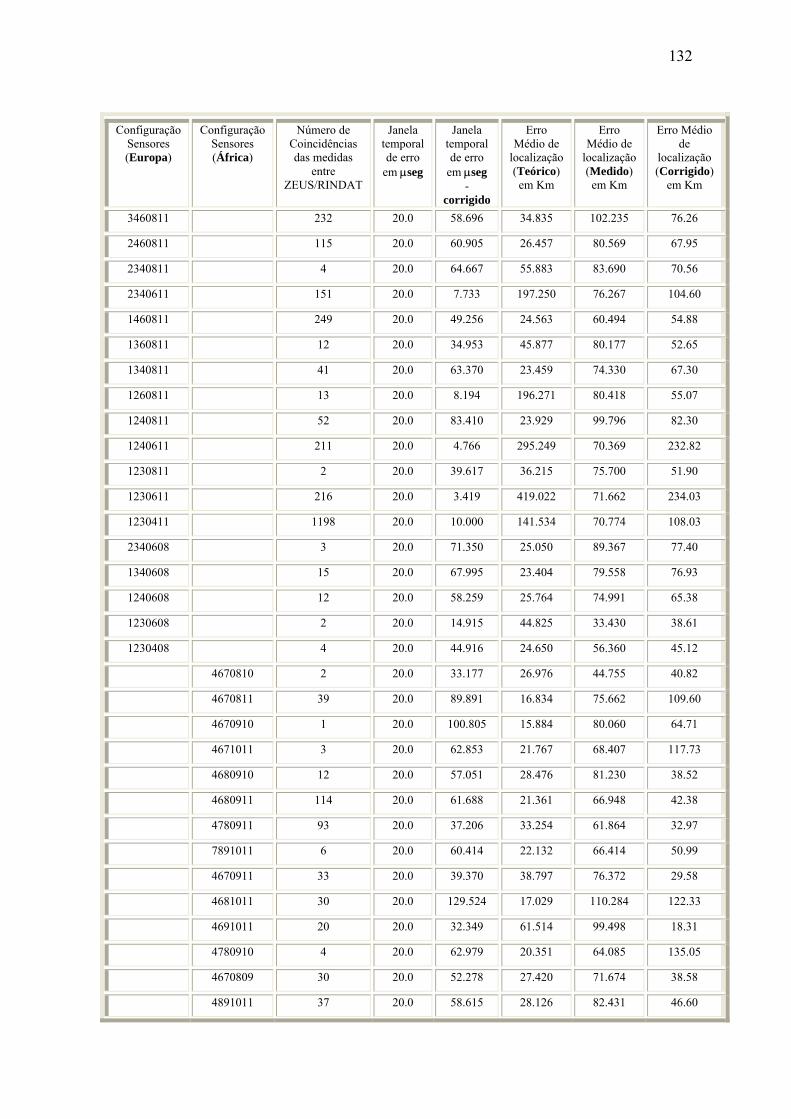
132
Configuração Sensores (Europa)
Configuração Sensores (África)
Número de Coincidências das medidas
entre ZEUS/RINDAT
Janela temporal de erro
em µseg
Janela temporal de erro
em µseg -
corrigido
Erro Médio de
localização (Teórico) em Km
Erro Médio de
localização (Medido) em Km
Erro Médio de
localização (Corrigido)
em Km
3460811 232 20.0 58.696 34.835 102.235 76.26
2460811 115 20.0 60.905 26.457 80.569 67.95
2340811 4 20.0 64.667 55.883 83.690 70.56
2340611 151 20.0 7.733 197.250 76.267 104.60
1460811 249 20.0 49.256 24.563 60.494 54.88
1360811 12 20.0 34.953 45.877 80.177 52.65
1340811 41 20.0 63.370 23.459 74.330 67.30
1260811 13 20.0 8.194 196.271 80.418 55.07
1240811 52 20.0 83.410 23.929 99.796 82.30
1240611 211 20.0 4.766 295.249 70.369 232.82
1230811 2 20.0 39.617 36.215 75.700 51.90
1230611 216 20.0 3.419 419.022 71.662 234.03
1230411 1198 20.0 10.000 141.534 70.774 108.03
2340608 3 20.0 71.350 25.050 89.367 77.40
1340608 15 20.0 67.995 23.404 79.558 76.93
1240608 12 20.0 58.259 25.764 74.991 65.38
1230608 2 20.0 14.915 44.825 33.430 38.61
1230408 4 20.0 44.916 24.650 56.360 45.12
4670810 2 20.0 33.177 26.976 44.755 40.82
4670811 39 20.0 89.891 16.834 75.662 109.60
4670910 1 20.0 100.805 15.884 80.060 64.71
4671011 3 20.0 62.853 21.767 68.407 117.73
4680910 12 20.0 57.051 28.476 81.230 38.52
4680911 114 20.0 61.688 21.361 66.948 42.38
4780911 93 20.0 37.206 33.254 61.864 32.97
7891011 6 20.0 60.414 22.132 66.414 50.99
4670911 33 20.0 39.370 38.797 76.372 29.58
4681011 30 20.0 129.524 17.029 110.284 122.33
4691011 20 20.0 32.349 61.514 99.498 18.31
4780910 4 20.0 62.979 20.351 64.085 135.05
4670809 30 20.0 52.278 27.420 71.674 38.58
4891011 37 20.0 58.615 28.126 82.431 46.60
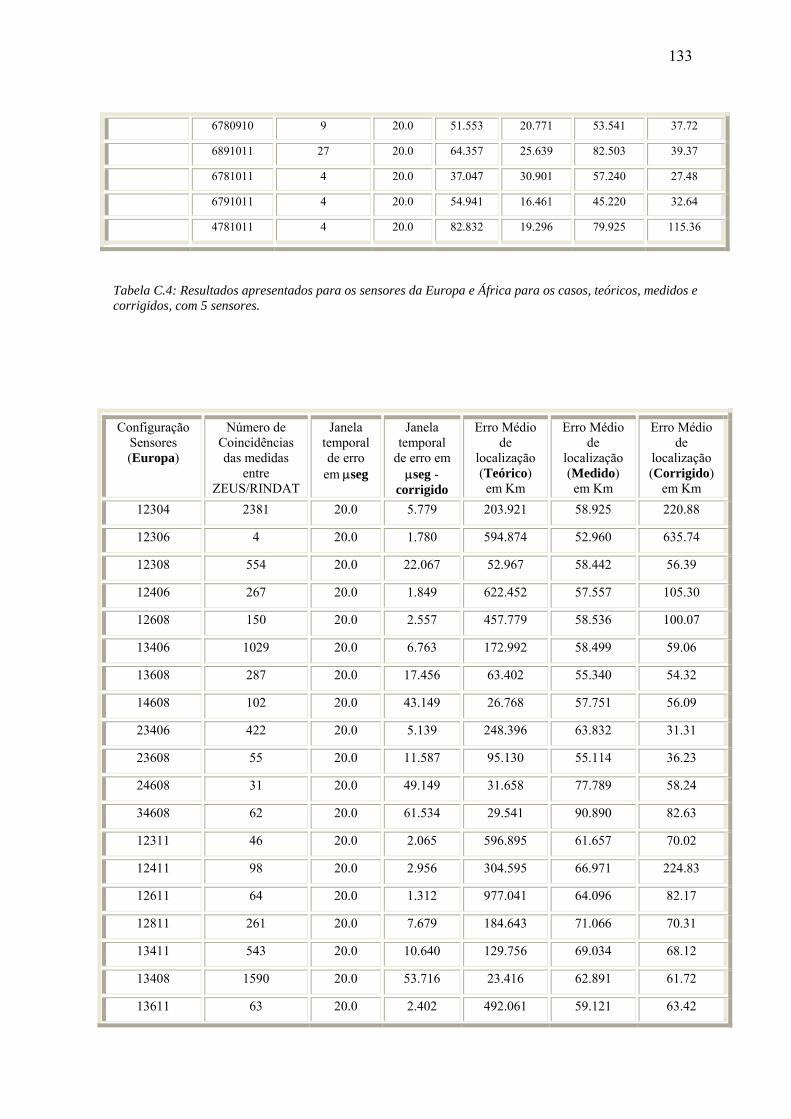
133
6780910 9 20.0 51.553 20.771 53.541 37.72
6891011 27 20.0 64.357 25.639 82.503 39.37
6781011 4 20.0 37.047 30.901 57.240 27.48
6791011 4 20.0 54.941 16.461 45.220 32.64
4781011 4 20.0 82.832 19.296 79.925 115.36
Tabela C.4: Resultados apresentados para os sensores da Europa e África para os casos, teóricos, medidos e corrigidos, com 5 sensores.
Configuração Sensores (Europa)
Número de Coincidências das medidas
entre ZEUS/RINDAT
Janela temporal de erro
em µseg
Janela temporal
de erro em µseg -
corrigido
Erro Médio de
localização (Teórico) em Km
Erro Médio de
localização (Medido) em Km
Erro Médio de
localização (Corrigido)
em Km 12304 2381 20.0 5.779 203.921 58.925 220.88
12306 4 20.0 1.780 594.874 52.960 635.74
12308 554 20.0 22.067 52.967 58.442 56.39
12406 267 20.0 1.849 622.452 57.557 105.30
12608 150 20.0 2.557 457.779 58.536 100.07
13406 1029 20.0 6.763 172.992 58.499 59.06
13608 287 20.0 17.456 63.402 55.340 54.32
14608 102 20.0 43.149 26.768 57.751 56.09
23406 422 20.0 5.139 248.396 63.832 31.31
23608 55 20.0 11.587 95.130 55.114 36.23
24608 31 20.0 49.149 31.658 77.789 58.24
34608 62 20.0 61.534 29.541 90.890 82.63
12311 46 20.0 2.065 596.895 61.657 70.02
12411 98 20.0 2.956 304.595 66.971 224.83
12611 64 20.0 1.312 977.041 64.096 82.17
12811 261 20.0 7.679 184.643 71.066 70.31
13411 543 20.0 10.640 129.756 69.034 68.12
13408 1590 20.0 53.716 23.416 62.891 61.72
13611 63 20.0 2.402 492.061 59.121 63.42
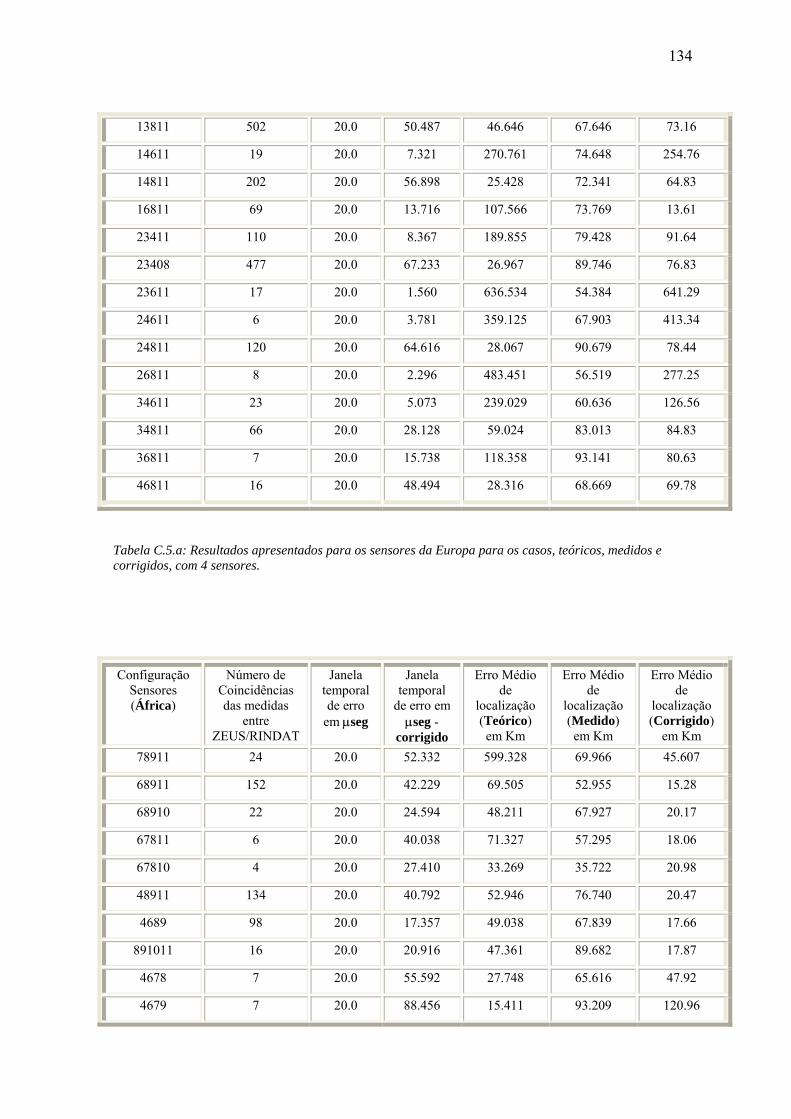
134
13811 502 20.0 50.487 46.646 67.646 73.16
14611 19 20.0 7.321 270.761 74.648 254.76
14811 202 20.0 56.898 25.428 72.341 64.83
16811 69 20.0 13.716 107.566 73.769 13.61
23411 110 20.0 8.367 189.855 79.428 91.64
23408 477 20.0 67.233 26.967 89.746 76.83
23611 17 20.0 1.560 636.534 54.384 641.29
24611 6 20.0 3.781 359.125 67.903 413.34
24811 120 20.0 64.616 28.067 90.679 78.44
26811 8 20.0 2.296 483.451 56.519 277.25
34611 23 20.0 5.073 239.029 60.636 126.56
34811 66 20.0 28.128 59.024 83.013 84.83
36811 7 20.0 15.738 118.358 93.141 80.63
46811 16 20.0 48.494 28.316 68.669 69.78
Tabela C.5.a: Resultados apresentados para os sensores da Europa para os casos, teóricos, medidos e corrigidos, com 4 sensores.
Configuração Sensores (África)
Número de Coincidências das medidas
entre ZEUS/RINDAT
Janela temporal de erro
em µseg
Janela temporal
de erro em µseg -
corrigido
Erro Médio de
localização (Teórico) em Km
Erro Médio de
localização (Medido) em Km
Erro Médio de
localização (Corrigido)
em Km 78911 24 20.0 52.332 599.328 69.966 45.607
68911 152 20.0 42.229 69.505 52.955 15.28
68910 22 20.0 24.594 48.211 67.927 20.17
67811 6 20.0 40.038 71.327 57.295 18.06
67810 4 20.0 27.410 33.269 35.722 20.98
48911 134 20.0 40.792 52.946 76.740 20.47
4689 98 20.0 17.357 49.038 67.839 17.66
891011 16 20.0 20.916 47.361 89.682 17.87
4678 7 20.0 55.592 27.748 65.616 47.92
4679 7 20.0 88.456 15.411 93.209 120.96
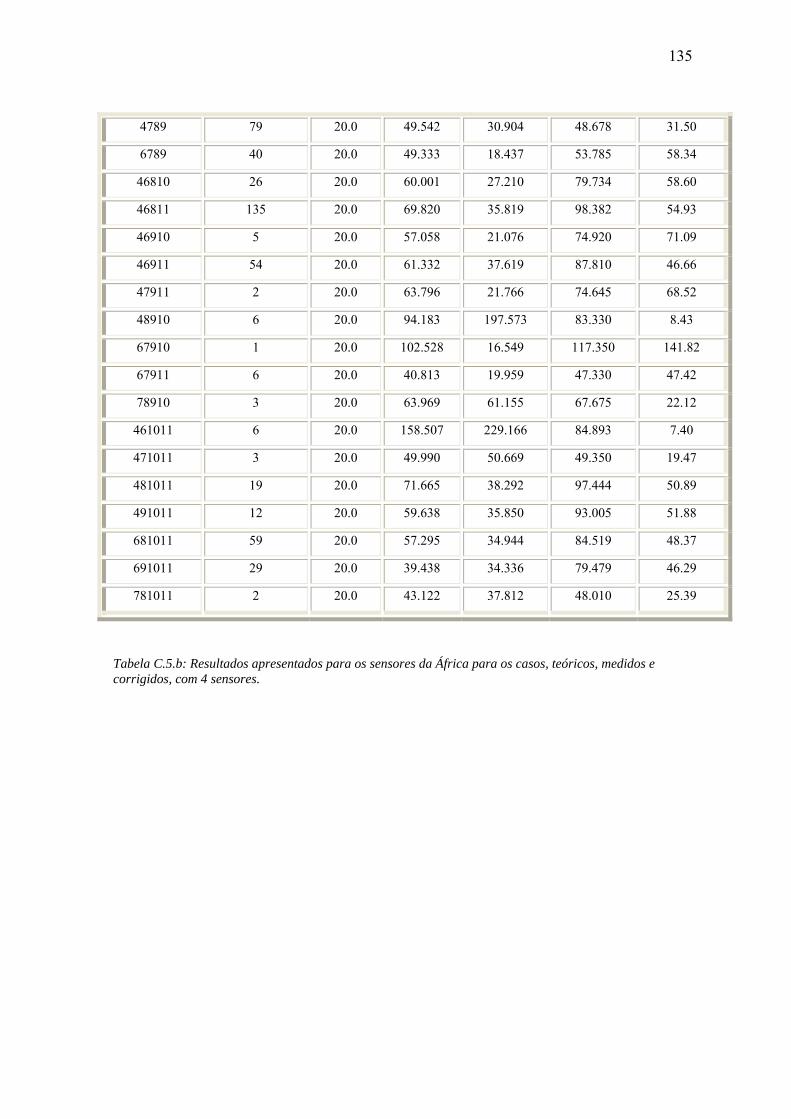
135
4789 79 20.0 49.542 30.904 48.678 31.50
6789 40 20.0 49.333 18.437 53.785 58.34
46810 26 20.0 60.001 27.210 79.734 58.60
46811 135 20.0 69.820 35.819 98.382 54.93
46910 5 20.0 57.058 21.076 74.920 71.09
46911 54 20.0 61.332 37.619 87.810 46.66
47911 2 20.0 63.796 21.766 74.645 68.52
48910 6 20.0 94.183 197.573 83.330 8.43
67910 1 20.0 102.528 16.549 117.350 141.82
67911 6 20.0 40.813 19.959 47.330 47.42
78910 3 20.0 63.969 61.155 67.675 22.12
461011 6 20.0 158.507 229.166 84.893 7.40
471011 3 20.0 49.990 50.669 49.350 19.47
481011 19 20.0 71.665 38.292 97.444 50.89
491011 12 20.0 59.638 35.850 93.005 51.88
681011 59 20.0 57.295 34.944 84.519 48.37
691011 29 20.0 39.438 34.336 79.479 46.29
781011 2 20.0 43.122 37.812 48.010 25.39
Tabela C.5.b: Resultados apresentados para os sensores da África para os casos, teóricos, medidos e corrigidos, com 4 sensores.