apresentação do powerpoint - engenharias-recife · pdf fileprof. me: lucas...
TRANSCRIPT

Professor Me: Lucas Corrêa de Almeida
Geometria analítica
Prof. Me: Lucas Corrêa de Almeida
Definição A palavra “geometria” vem do grego “geometrien” onde “geo”
significa terra e “metrien” medida. Geometria foi, em sua origem,a ciência de medição de terras.
O historiador grego Heródoto (500 a.C.) atribuiu aosegípcios o início da geometria, mas outras civilizações antigas(babilônios, hindus, chineses) também possuíam muitasinformações geométricas.

Prof. Me: Lucas Corrêa de Almeida
Definição Geometria plana
A geometria plana, também chamada geometriaelementar ou Euclidiana, teve início na Grécia antiga. Esseestudo analisava as diferentes formas de objetos, e baseia-seem três conceitos básicos: ponto, reta e plano.

Prof. Me: Lucas Corrêa de Almeida
Definição Geometria espacial
Ramo da geometria que estuda a medida do espaçoocupado por um sólido. Cálculo dos volumes de um cubo, prisma,pirâmide, cone, cilindro, esfera e de um paralelepípedo.

Prof. Me: Lucas Corrêa de Almeida
Definição Axioma
O termo axioma é originado da palavra grega αξιωμα(axioma), que significa algo que é considerado ajustado ouadequado, ou que tem um significado evidente. Entre osfilósofos dos gregos antigos, um axioma era uma reivindicaçãoque podia ser vista para ser verdade sem nenhuma necessidadede prova.
Exemplos:1 - Dados quaisquer dois pontos distintos, A e B, existe uma única reta queos contém
Prof. Me: Lucas Corrêa de Almeida
2 – Em cada reta existem ao menos dois pontos distintos
3 - Dois segmentos são congruentes (iguais) se eles têm a mesma medida.
4 - Dois ângulos são congruentes (iguais) se eles têm a mesma medida.
Observação. Usamos o termo congruentes, e não iguais, para distinguirdo termo “igual”, que significa, matematicamente, o “mesmo objetomatemático”.
Definição

Prof. Me: Lucas Corrêa de Almeida
Definição Alguns símbolos usados em geometria
A, B, C,.... ponto
r, s, t,... reta
AÔB, DÔE,... Ô ângulo do vértice O ou medida de ângulo

Prof. Me: Lucas Corrêa de Almeida
Definição 𝐴𝐵,... segmento de extremidade A e B, ou reta que passa por
A,B
𝛥 ABC triângulo de vértices A,B,C
AB ≡ CD segmento AB congruente ao segmento CD

Prof. Me: Lucas Corrêa de Almeida
VETORES
Prof. Me: Lucas Corrêa de Almeida
Grandezas físicas
Podemos dizer de modo mais usual que grandeza é tudoaquilo que pode variar quantitativamente.
Deste modo, grandezas físicas são as que podem sermedidas.
São divididas em dois grupos: escalares e vetoriais.

Prof. Me: Lucas Corrêa de Almeida
Vetores e Escalares Um vetor possui módulo assim como direção e sentido. Uma
grandeza vetorial possui tanto módulo (valor numérico) quandodireção e sentido, portanto, pode ser representado por um vetor.
Exemplo: deslocamento, velocidade e aceleração.
Nem toda grandeza física envolve uma direção e/ou umsentido. Essas grandezas são denominadas grandezas escalares.Que são grandezas que só possuem um valor e uma unidade:
Exemplo: temperatura, massa, tempo.

Prof. Me: Lucas Corrêa de Almeida
Representação de um vetor É um ente matemático representado por um segmento de reta
orientado. E tem algumas características básicas.
Possuí módulo. (Que é o comprimento da reta)
Tem uma direção (plano em que se analisa)
E um sentido. (Que é pra onde a “flecha” está apontando).
Exemplo:
Módulo
Sentido
Direção da
Reta Suporte

Prof. Me: Lucas Corrêa de Almeida
Representação de uma Grandeza Vetorial
As grandezas vetoriais são representadas daseguinte forma: a letra que representa agrandeza, e uma a “flechinha” sobre a letra.Da seguinte forma...
𝑣𝑩
𝑨
𝐹𝑶 𝑷
𝑑
𝑴
𝑵

Prof. Me: Lucas Corrêa de Almeida
Comparação entre vetores
Vetores iguais
Mesmo Módulo
Mesma Direção
Mesmo Sentido
O vetor 𝑎 é igual ao vetor 𝑏.
a
b
r
s
𝑎 = 𝑏

Prof. Me: Lucas Corrêa de Almeida
Comparação entre vetores
Vetores Opostos
Sobre os vetores 𝑏 e 𝑐 podemos afirmar:
Tem o mesmo módulo, mesma direção mas sentidos
opostos.
O vetor 𝑐 é oposto aos vetores 𝑎 e 𝑏 .
a
b
r
s
ct
𝑎 = 𝑏 = − 𝑐

Prof. Me: Lucas Corrêa de Almeida
Vetores Observações
a) Quando escrevemos: 𝑣 = 𝐴𝐵, estamos dizendo que um vetor 𝑣 édeterminado pelo segmento orientado AB.
b) Quando dois vetores são paralelos, indicamos por 𝑢// 𝑣.
Exemplo:
𝑣 = 𝐴𝐵
𝑎//𝑏
Exemplo:

Prof. Me: Lucas Corrêa de Almeida
Vetores
c) Dois vetores 𝑢 e 𝑣 são iguais, e indica-se por 𝑢 = 𝑣, se tiveremiguais o módulo, a direção e o sentido; Observe:
d) Qualquer ponto do espaço é representante do vetor zero (ouvetor nulo), que é indicado por 0 ou 𝐴𝐴 (a origem coincide com aextremidade). Por não possuir direção e sentidos definidos,considera-se paralelo a qualquer vetor
𝒖 ≠ 𝒗 𝒖 ≠ 𝒗 𝒖 ≠ 𝒗 𝒖 = 𝒗
𝑉𝑒𝑡𝑜𝑟: 0 𝑜𝑢 𝐴𝐴𝐴
Sentidos opostos Módulos diferentes Direções e sentidos
diferentesMódulo, direção e
sentido iguais.
Prof. Me: Lucas Corrêa de Almeida
Vetorese) A cada vetor não-nulo 𝑣 corresponde um vetor oposto − 𝑣, de
mesmo módulo e mesma direção de 𝑣 , porém, de sentidocontrário. Se 𝑣 = 𝐴𝐵, o vetor 𝐵𝐴é o oposto de 𝐴𝐵, isto é, 𝐴𝐵 =
− 𝐴𝐵 = 𝐵𝐴.
𝑣 = 𝐴𝐵=−𝐵𝐴

Prof. Me: Lucas Corrêa de Almeida
Vetores
f) - O vetor 𝑢 é unitário se 𝑢 = 1.
- A cada vetor 𝑣, com 𝑣 ≠ 0, é possível associar dois vetoresunitários de mesma direção de 𝑣 𝑢 e −𝑢 . Na figura,vemos 𝑣 = 6 e 𝑢 = −𝑢 = 1
- O vetor 𝑢 unitário que tem o mesmo sentido de 𝑣 é chamadoversor de 𝑣.
Prof. Me: Lucas Corrêa de Almeida
Vetores
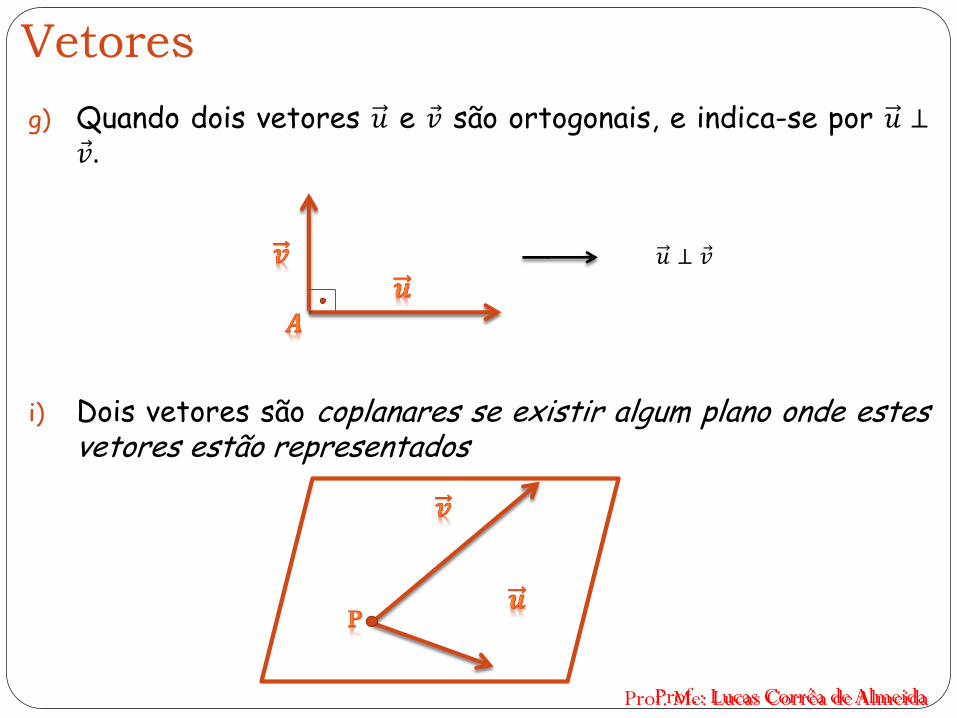
g) Quando dois vetores 𝑢 e 𝑣 são ortogonais, e indica-se por 𝑢 ⊥ 𝑣.
i) Dois vetores são coplanares se existir algum plano onde estesvetores estão representados
Prof.: Lucas Corrêa de Almeida
𝑢 ⊥ 𝑣

Prof. Me: Lucas Corrêa de Almeida
Exercícios1) A figura abaixo é constituída de nove quadrados congruentes.Decidir se é verdadeira ou falsa cada uma das seguintes afirmações.
A B C D
L M N E
J I H G
KP O
F

Prof. Me: Lucas Corrêa de Almeida
Exercícios2) A figura abaixo representa um paralelepípedo retângulo. Decidir se éverdadeira ou falsa cada uma das afirmações
A B
CD
E
HG
F

Prof. Me: Lucas Corrêa de Almeida
Soma vetorial Há duas regras para realização da soma vetorial:
Regra do paralelogramo;
Regra do polígono.

Prof. Me: Lucas Corrêa de Almeida
Soma vetorial regra do paralelogramo
Assim:
Neste caso os vetores são transpostos de forma afecharem um paralelogramo, esta regra é eficaz somente comdois vetores.
OBS: Paralelogramo porque traça-se uma reta paralela saindo daorigem do outro seguimento.
𝑎
𝑏 𝑎
𝑏
+ =
𝑆
𝑆 = 𝑎 + 𝑏
Prof. Me: Lucas Corrêa de Almeida
ExemplosDado os vetores ....
Prof. Me: Lucas Corrêa de Almeida
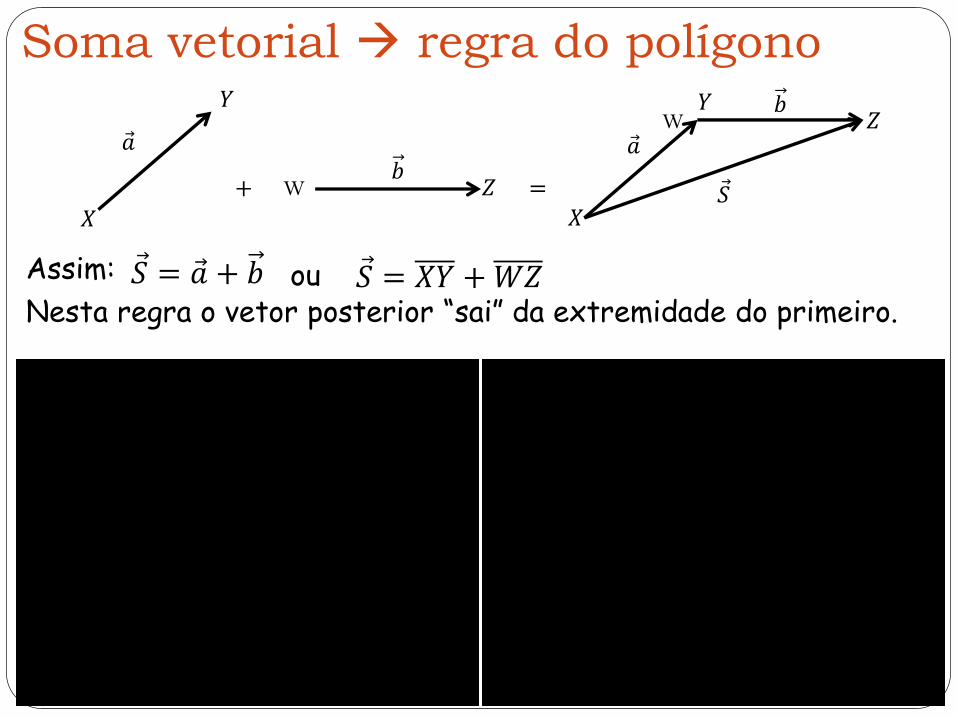
Soma vetorial regra do polígono
Assim:
Nesta regra o vetor posterior “sai” da extremidade do primeiro.
𝑎𝑏
𝑆
𝑏
𝑎
+ =
𝑋
𝑌
W 𝑍
𝑋
𝑌W 𝑍
𝑆 = 𝑎 + 𝑏 ou 𝑆 = 𝑋𝑌 +𝑊𝑍
Prof. Me: Lucas Corrêa de Almeida
Soma vetorial Propriedades
Sendo 𝑢, 𝑣 e 𝑤 vetores quaisquer, a adição admite as seguintespropriedades:
i. Comutativa: 𝑢 + 𝑣 = 𝑣 + 𝑢
ii. Associativa: 𝑢 + 𝑣 + 𝑤 = 𝑢 + ( 𝑣 + 𝑤)
iii. Elemento neutro: 𝑢 + 0 = 𝑢
iv. Elemento oposto: 𝑢 + (−𝑢) = 0
Prof. Me: Lucas Corrêa de Almeida
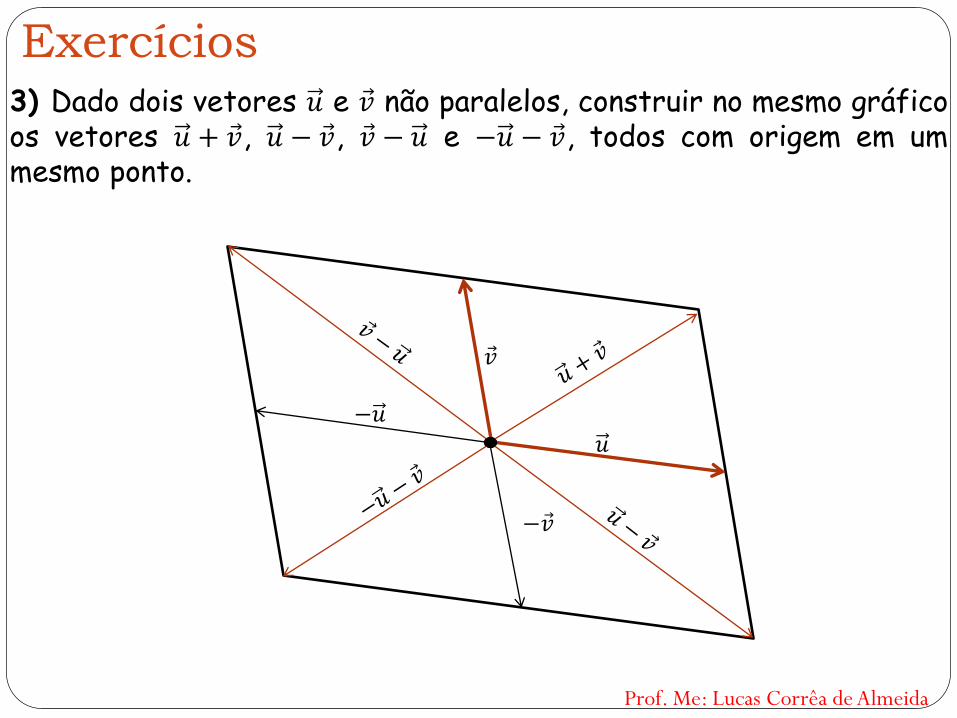
Exercícios3) Dado dois vetores 𝑢 e 𝑣 não paralelos, construir no mesmo gráficoos vetores 𝑢 + 𝑣, 𝑢 − 𝑣, 𝑣 − 𝑢 e −𝑢 − 𝑣, todos com origem em ummesmo ponto.
𝑣
𝑢
− 𝑣
−𝑢
Prof. Me: Lucas Corrêa de Almeida
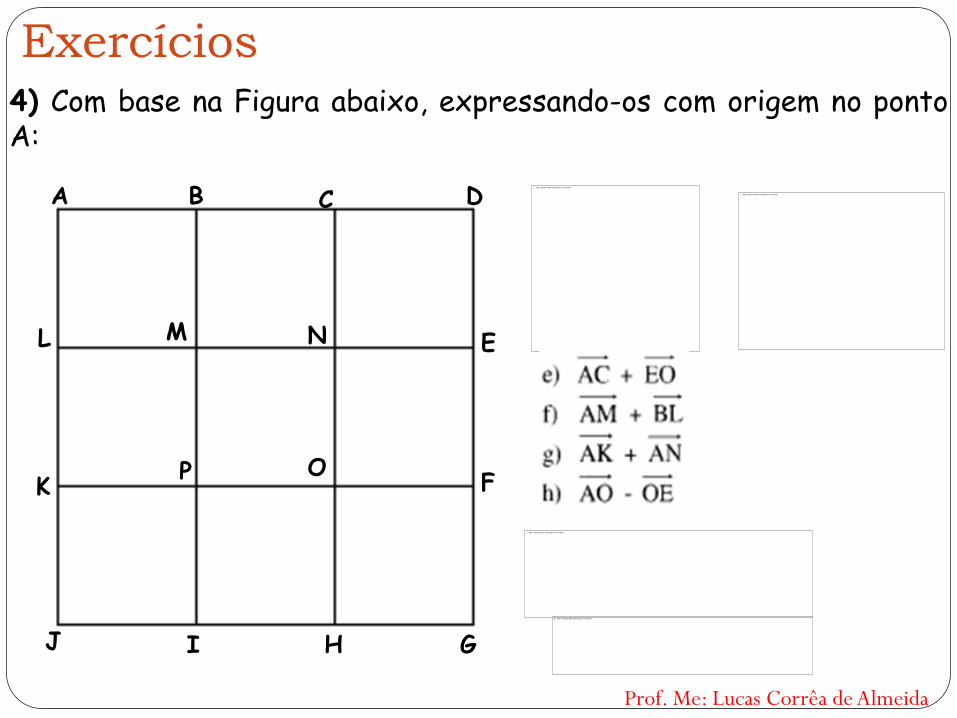
Exercícios4) Com base na Figura abaixo, expressando-os com origem no pontoA:
A B C D
L M N E
J I H G
KP O
F

Prof. Me: Lucas Corrêa de Almeida
Exercícios5) Com base na figura abaixo, determinar os vetores abaixo,expressando-os com origem no ponto A:
A B
CD
E
HG
F

Prof. Me: Lucas Corrêa de Almeida
Componentes de vetores Uma técnica mais organizada para somar vetores envolve
álgebra, mas exigem que vetores sejam colocados em sistema decoordenadas. Um componente de um vetor é a projeção domesmo sobre o eixo.
ax=componente de 𝑎 na coordenada xay=componente de 𝑎 na coordenada y
𝑎𝑦
𝑎𝑥
𝑎
Este processo é chamado de decomposição de vetores.Portanto:
sin 𝜃 =𝑎𝑦
𝑎cos 𝜃 =
𝑎𝑥 𝑎
tan 𝜃 =𝑎𝑦
𝑎𝑥
𝑦
𝑥𝜃

Prof. Me: Lucas Corrêa de Almeida
Módulo de um vetorConsidere o vetor no plano cartesiano:
onde 𝑣𝑥 = 3 𝑚 e 𝑣𝑦 = 4 𝑚
O módulo do vetor 𝑣, pode ser encontrado através de umasimples relação trigonométrica, conhecida como teorema dePitágoras. Fazendo:
4 𝑣
𝑦(𝑚)
𝑥(𝑚)3
𝑎² = 𝑏² + 𝑐² → 𝑣 2 = 3² + 4² → 𝑣 = 9 + 16 → 𝑣 = 5𝑚

Prof. Me: Lucas Corrêa de Almeida
Módulo de um vetor
Podemos então dizer que, para encontrarmos o módulo de um vetorbasta elevarmos seus componentes ao quadrado, soma-los e logotirar a raiz:
No caso da soma de mais vetores, o módulo pode serencontrado, fazendo a relação:
𝑣 = 𝑣²𝑥 + 𝑣²𝑦 + 𝑣²𝑧 + ∙∙∙ +𝑣²𝑛
𝑣 = 𝑣²𝑥 + 𝑣²𝑦
Prof. Me: Lucas Corrêa de Almeida
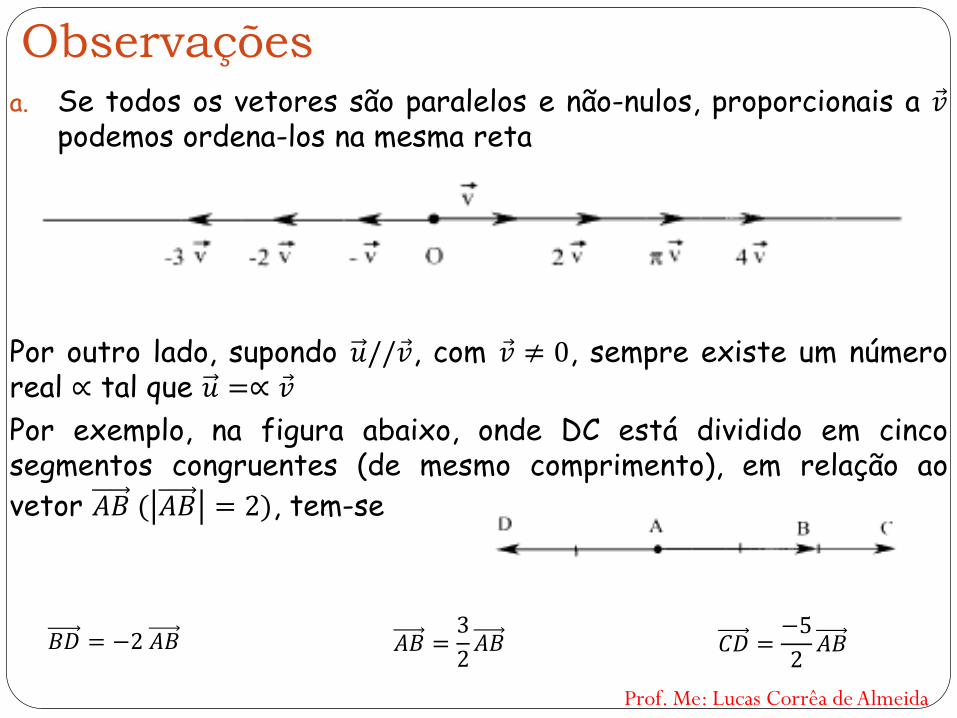
Observaçõesa. Se todos os vetores são paralelos e não-nulos, proporcionais a 𝑣
podemos ordena-los na mesma reta
Por outro lado, supondo 𝑢// 𝑣, com 𝑣 ≠ 0, sempre existe um númeroreal ∝ tal que 𝑢 =∝ 𝑣
Por exemplo, na figura abaixo, onde DC está dividido em cincosegmentos congruentes (de mesmo comprimento), em relação ao
vetor 𝐴𝐵 ( 𝐴𝐵 = 2), tem-se
𝐴𝐵 =3
2𝐴𝐵𝐵𝐷 = −2 𝐴𝐵 𝐶𝐷 =
−5
2𝐴𝐵
Prof. Me: Lucas Corrêa de Almeida
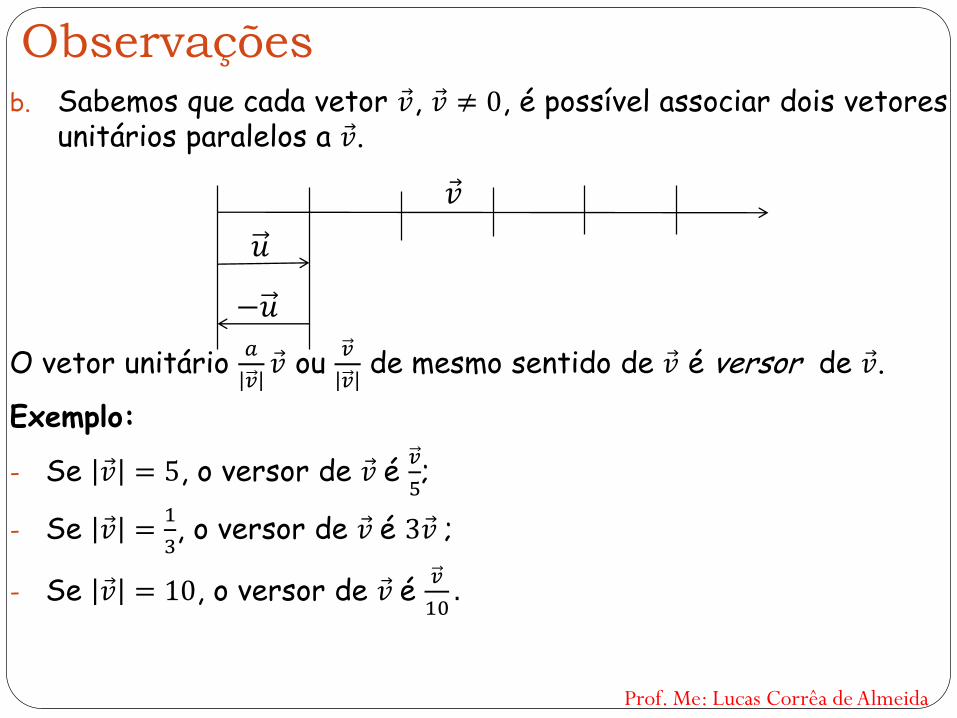
Observaçõesb. Sabemos que cada vetor 𝑣, 𝑣 ≠ 0, é possível associar dois vetores
unitários paralelos a 𝑣.
O vetor unitário𝑎
𝑣 𝑣 ou
𝑣
𝑣de mesmo sentido de 𝑣 é versor de 𝑣.
Exemplo:
- Se 𝑣 = 5, o versor de 𝑣 é𝑣
5;
- Se 𝑣 =1
3, o versor de 𝑣 é 3 𝑣 ;
- Se 𝑣 = 10, o versor de 𝑣 é𝑣
10.
𝑣
𝑢
−𝑢

Prof. Me: Lucas Corrêa de Almeida
ExemploExemplo:

Prof. Me: Lucas Corrêa de Almeida
Problemas pospostosLivro: Paulo Winterle
Página: 14 – n°s: 1 e 2
Página: 15 – n°s: 4, 5 e 6
Pàgina: 16 – n°s: 8 e 12
Prof. Me: Lucas Corrêa de Almeida
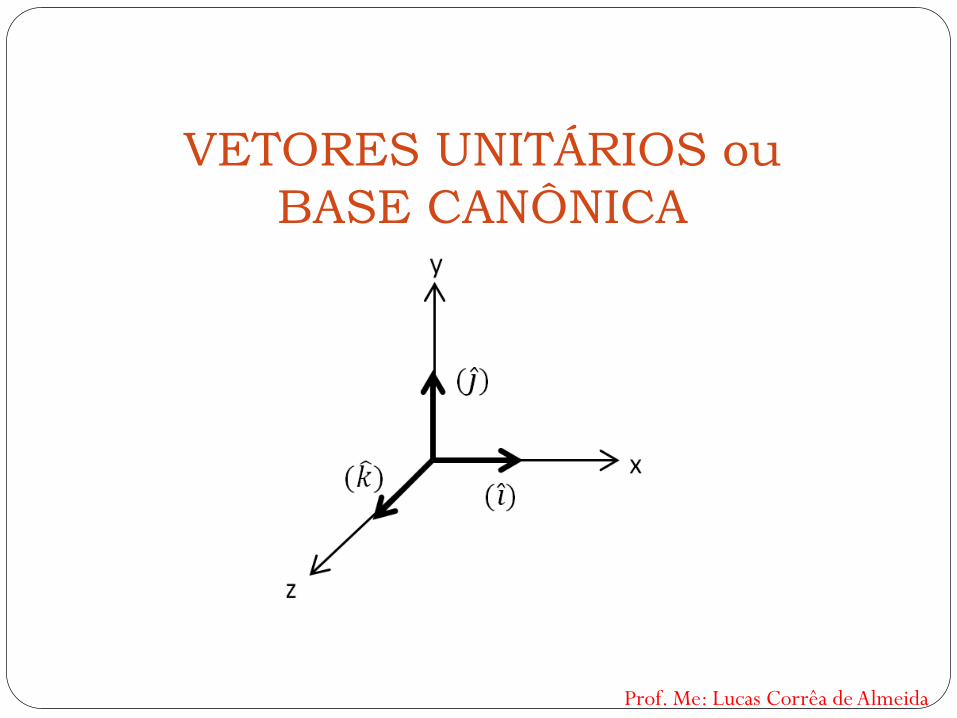
VETORES UNITÁRIOS ou
BASE CANÔNICA

Prof. Me: Lucas Corrêa de Almeida
Vetores Unitários Um vetor unitário é um vetor que possui módulo igual a 1. Sua
única função é especificar uma direção e um sentido, ou seja, elenão possui dimensão e nem unidade.
São representados da seguinte maneira:
𝑎 = 𝑎𝑥 𝑖 + 𝑎𝑦 𝑗 + 𝑎𝑧 𝑘

Prof. Me: Lucas Corrêa de Almeida
Vetores Unitários Podemos expressar qualquer vetor deste sistema de coordenadas. Por
exemplo 𝑎 𝑒 𝑏 abaixo:
Este sistema é chamado de sistema de coordenadas dextrogiro;
𝑎𝑥 e 𝑎𝑦 são chamados de componentes escalares (ou como dito antes,simplesmente componentes);
𝑎𝑥 𝑖 𝑒 𝑎𝑦 𝑗 são vetores, chamados componentes vetoriais de 𝑎.
Exemplo:
𝑎 = 𝑎𝑥 𝑖 + 𝑎𝑦 𝑗 𝑏 = 𝑏𝑥 𝑖 + 𝑏𝑦 𝑗 + 𝑏𝑧 𝑘
𝑎𝑥 𝑖
𝑎𝑦 𝑗
𝑎 𝑎 = 𝑎𝑥 𝑖 + 𝑎𝑦 𝑗

Prof. Me: Lucas Corrêa de Almeida
Somando os vetores componente a componente
Dado os vetores 𝑎 𝑒 𝑏, calcule soma: 𝑅 = 𝑎 + 𝑏
Sendo:
Se calcularmos a diferença, teremos:
𝑎 = 𝑎𝑥 𝑖 + 𝑎𝑦 𝑗 + 𝑎𝑧 𝑘 𝑏 = 𝑏𝑥 𝑖 + 𝑏𝑦 𝑗 + 𝑏𝑧 𝑘 𝑅 = 𝑅𝑥 𝑖 + 𝑅𝑦 𝑗 + 𝑅𝑧 𝑘
𝑅𝑥 = 𝑎𝑥 𝑖 + 𝑏𝑥 𝑖 𝑅𝑦 = 𝑎𝑦 𝑗 + 𝑏𝑦 𝑗 𝑅𝑧 = 𝑎𝑧 𝑘 + 𝑏𝑧 𝑘
𝑅 = 𝑎 − 𝑏 𝑅 = 𝑎𝑥 − 𝑏𝑥 𝑖 + 𝑎𝑦 − 𝑏𝑦 𝑗 + 𝑎𝑧 − 𝑏𝑧 𝑘

Prof. Me: Lucas Corrêa de Almeida
Exercício Dado os vetores realize a soma e faça um gráfico contendo cada
um e a resultante:
Exercícios do livro: 1/2/3/4/5/6/7/8/9/11/12/13
𝑎 = 4,2 𝑖 − 1,5 𝑗
𝑏 = − 1,6 𝑖 + 2,9 𝑗 𝑐 = − 3,7 𝑖

Prof. Me: Lucas Corrêa de Almeida
Multiplicação de VetoresMultiplicação de um vetor por um escalar (número)
Se multiplicarmos um vetor ( 𝑎) por um escalar (S), obteremos umnovo vetor S 𝑎. Seu módulo é o produto de 𝑎 pelo valor absoluto deS. Sua direção e sentido são os mesmo se S > 0 e contrário se S <0.
Exemplo:
Se 𝑆 = 4 e 𝑎 = 2 𝑖 + 3 𝑗 − 6 𝑘, então:
𝑆 𝑎 = 4(2 𝑖 + 3 𝑗 − 6 𝑘) 𝑆 𝑎 = 8 𝑖 + 12 𝑗 − 24 𝑘
Prof. Me: Lucas Corrêa de Almeida
Multiplicação de VetoresMultiplicação de vetor por vetor
Existem duas formas de multiplicar vetor por vetor
1 ª PRODUTO ESCALAR (produz um escalar):
O produto escalar de 𝑎 𝑒 𝑏 é definido como:
OBS:
Se 𝜃=0° cos 0° = 1 𝑎 . 𝑏 = 𝑎𝑏 (vetores paralelos)
Se 𝜃=90° cos 90° = 0 𝑎 . 𝑏 = 0 (vetores ortogonais)
O produto escalar obedece a lei comutativa
𝑎 . 𝑏 = 𝑎 . 𝑏 . cos 𝜃
𝑎 . 𝑏 = 𝑏 . 𝑎
Prof. Me: Lucas Corrêa de Almeida
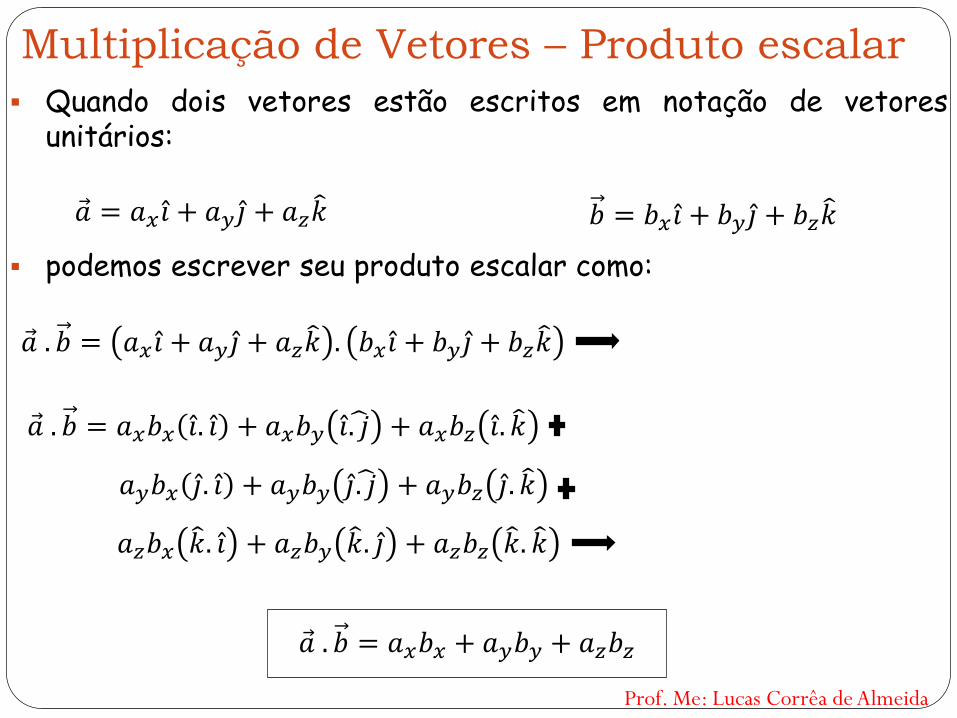
Multiplicação de Vetores – Produto escalar
Quando dois vetores estão escritos em notação de vetoresunitários:
podemos escrever seu produto escalar como:
𝑎 = 𝑎𝑥 𝑖 + 𝑎𝑦 𝑗 + 𝑎𝑧 𝑘 𝑏 = 𝑏𝑥 𝑖 + 𝑏𝑦 𝑗 + 𝑏𝑧 𝑘
𝑎 . 𝑏 = 𝑎𝑥 𝑖 + 𝑎𝑦 𝑗 + 𝑎𝑧 𝑘 . 𝑏𝑥 𝑖 + 𝑏𝑦 𝑗 + 𝑏𝑧 𝑘
𝑎 . 𝑏 = 𝑎𝑥𝑏𝑥 + 𝑎𝑦𝑏𝑦 + 𝑎𝑧𝑏𝑧
𝑎 . 𝑏 = 𝑎𝑥𝑏𝑥 𝑖. 𝑖 + 𝑎𝑥𝑏𝑦 𝑖 . 𝑗 + 𝑎𝑥𝑏𝑧 𝑖. 𝑘
𝑎𝑦𝑏𝑥 𝑗. 𝑖 + 𝑎𝑦𝑏𝑦 𝑗 . 𝑗 + 𝑎𝑦𝑏𝑧 𝑗. 𝑘
𝑎𝑧𝑏𝑥 𝑘. 𝑖 + 𝑎𝑧𝑏𝑦 𝑘. 𝑗 + 𝑎𝑧𝑏𝑧 𝑘. 𝑘

Prof. Me: Lucas Corrêa de Almeida
Multiplicação de Vetores 2º PRODUTO VETORIAL (produz outro vetor)
O produto vetorial de 𝑎 𝑒 𝑏, (lê-se a vetorial b), produz um terceirovetor 𝑐 cujo módulo é dado por:
Onde o módulo pode ser calculado como: 𝑎𝑥𝑏 = 𝑎𝑏 𝑠𝑒𝑛 𝜃
OBS:
Se 𝜃 = 0°ou 180°sin 𝜃 = 0 𝑐 = 𝑎𝑥𝑏 = 0
Se 𝜃 = 90° sin 𝜃 = 1 𝑐 = 𝑎𝑥𝑏 = 𝑎𝑏
Se 𝜃 = 270°sin 𝜃 = -1 𝑐 = 𝑎𝑥𝑏 = −𝑎𝑏
𝑐 = 𝑎𝑥𝑏
Prof. Me: Lucas Corrêa de Almeida
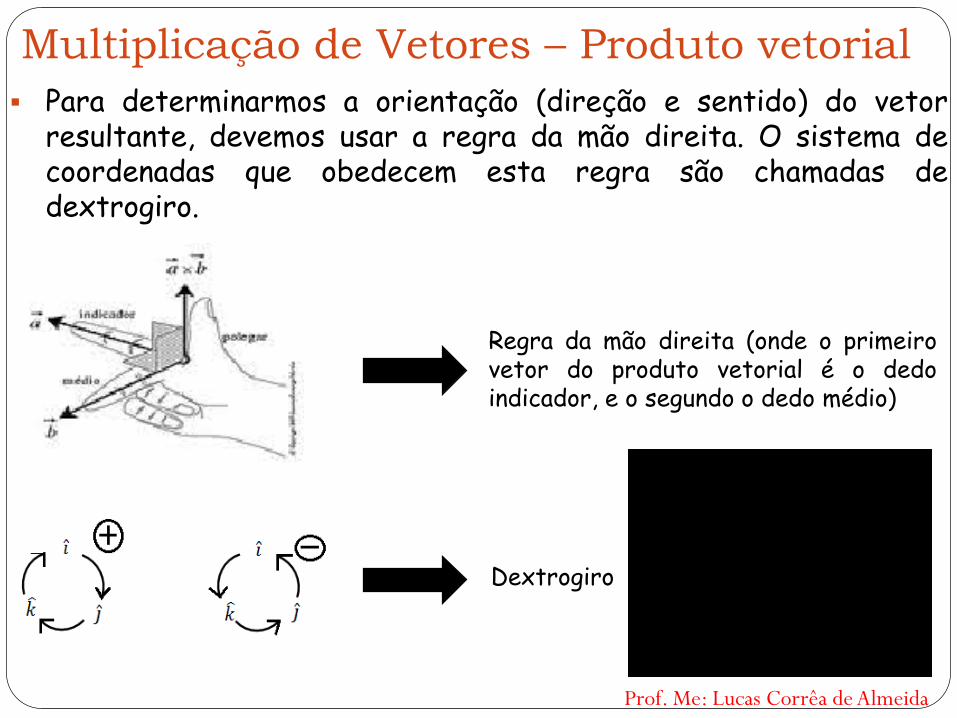
Multiplicação de Vetores – Produto vetorial
Para determinarmos a orientação (direção e sentido) do vetorresultante, devemos usar a regra da mão direita. O sistema decoordenadas que obedecem esta regra são chamadas dedextrogiro.
Regra da mão direita (onde o primeirovetor do produto vetorial é o dedoindicador, e o segundo o dedo médio)
Dextrogiro
Prof. Me: Lucas Corrêa de Almeida
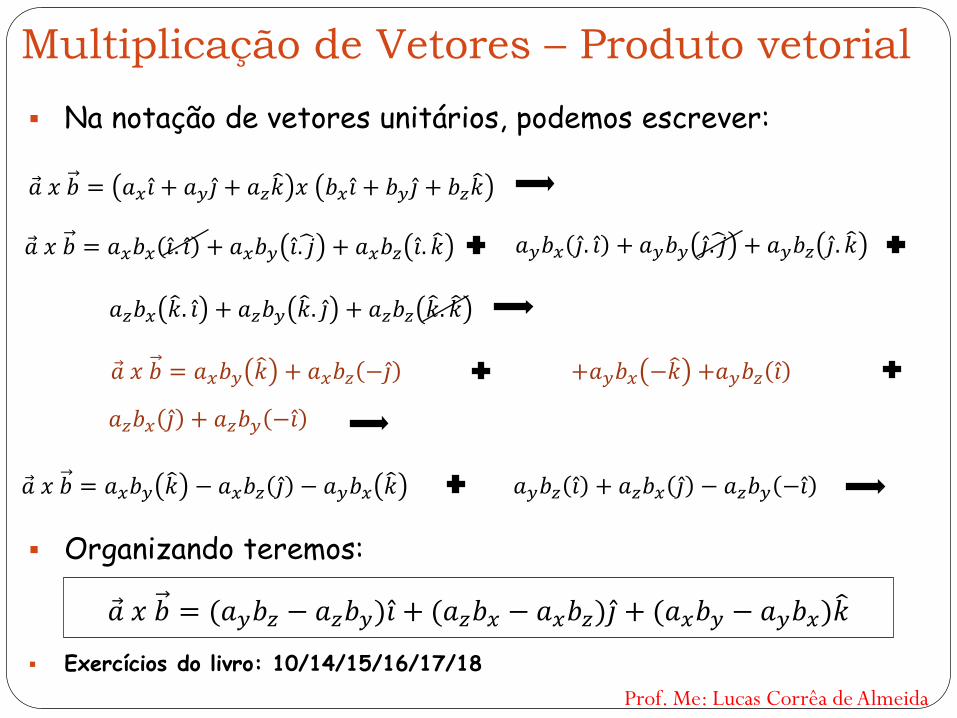
Na notação de vetores unitários, podemos escrever:
Organizando teremos:
Exercícios do livro: 10/14/15/16/17/18
𝑎 𝑥 𝑏 = (𝑎𝑦𝑏𝑧 − 𝑎𝑧𝑏𝑦) 𝑖 + (𝑎𝑧𝑏𝑥 − 𝑎𝑥𝑏𝑧) 𝑗 + (𝑎𝑥𝑏𝑦 − 𝑎𝑦𝑏𝑥) 𝑘
𝑎 𝑥 𝑏 = 𝑎𝑥 𝑖 + 𝑎𝑦 𝑗 + 𝑎𝑧 𝑘 𝑥 𝑏𝑥 𝑖 + 𝑏𝑦 𝑗 + 𝑏𝑧 𝑘
𝑎 𝑥 𝑏 = 𝑎𝑥𝑏𝑥 𝑖. 𝑖 + 𝑎𝑥𝑏𝑦 𝑖 . 𝑗 + 𝑎𝑥𝑏𝑧 𝑖. 𝑘 𝑎𝑦𝑏𝑥 𝑗. 𝑖 + 𝑎𝑦𝑏𝑦 𝑗 . 𝑗 + 𝑎𝑦𝑏𝑧 𝑗. 𝑘
𝑎𝑧𝑏𝑥 𝑘. 𝑖 + 𝑎𝑧𝑏𝑦 𝑘. 𝑗 + 𝑎𝑧𝑏𝑧 𝑘. 𝑘
𝑎 𝑥 𝑏 = 𝑎𝑥𝑏𝑦 𝑘 + 𝑎𝑥𝑏𝑧 − 𝑗 +𝑎𝑦𝑏𝑥 − 𝑘 +𝑎𝑦𝑏𝑧 𝑖
𝑎 𝑥 𝑏 = 𝑎𝑥𝑏𝑦 𝑘 − 𝑎𝑥𝑏𝑧 𝑗 − 𝑎𝑦𝑏𝑥 𝑘 𝑎𝑦𝑏𝑧 𝑖 + 𝑎𝑧𝑏𝑥 𝑗 − 𝑎𝑧𝑏𝑦 − 𝑖
𝑎𝑧𝑏𝑥 𝑗 + 𝑎𝑧𝑏𝑦 − 𝑖
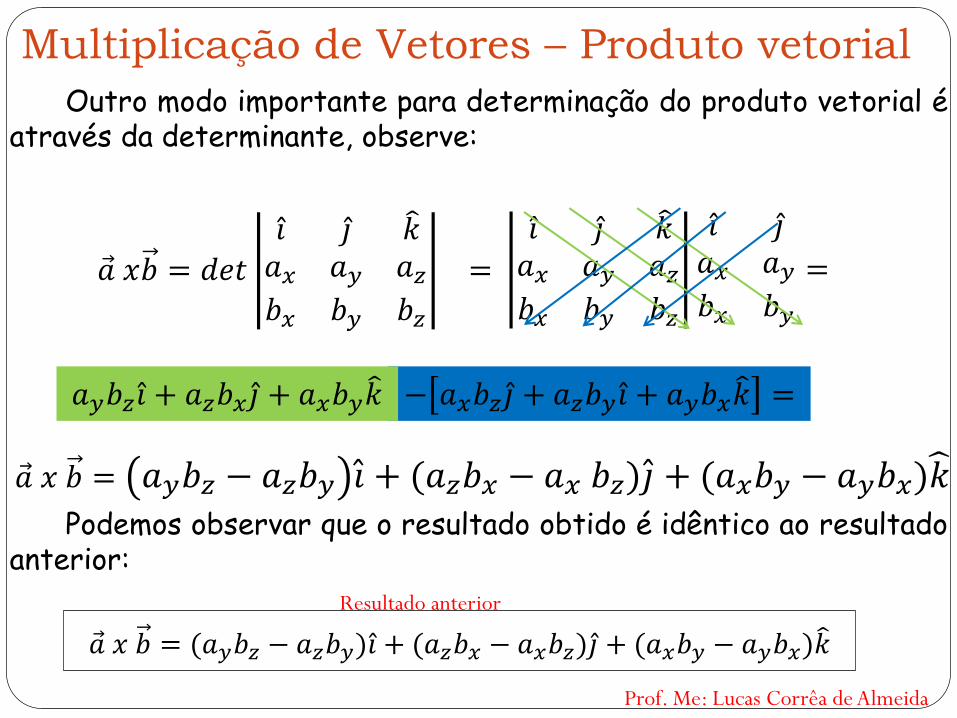
Multiplicação de Vetores – Produto vetorial
Prof. Me: Lucas Corrêa de Almeida
Outro modo importante para determinação do produto vetorial éatravés da determinante, observe:
Podemos observar que o resultado obtido é idêntico ao resultadoanterior:
𝑖 𝑗 𝑘𝑎𝑥 𝑎𝑦 𝑎𝑧𝑏𝑥 𝑏𝑦 𝑏𝑧
𝑖 𝑗𝑎𝑥 𝑎𝑦𝑏𝑥 𝑏𝑦
= 𝑎 𝑥𝑏 = 𝑑𝑒𝑡
𝑖 𝑗 𝑘𝑎𝑥 𝑎𝑦 𝑎𝑧𝑏𝑥 𝑏𝑦 𝑏𝑧
=
− 𝑎𝑥𝑏𝑧 𝑗 + 𝑎𝑧𝑏𝑦 𝑖 + 𝑎𝑦𝑏𝑥 𝑘 =𝑎𝑦𝑏𝑧 𝑖 + 𝑎𝑧𝑏𝑥 𝑗 + 𝑎𝑥𝑏𝑦 𝑘
𝑎 𝑥 𝑏 = 𝑎𝑦𝑏𝑧 − 𝑎𝑧𝑏𝑦 𝑖 + 𝑎𝑧𝑏𝑥 − 𝑎𝑥 𝑏𝑧 𝑗 + (𝑎𝑥𝑏𝑦 − 𝑎𝑦𝑏𝑥) 𝑘
𝑎 𝑥 𝑏 = (𝑎𝑦𝑏𝑧 − 𝑎𝑧𝑏𝑦) 𝑖 + (𝑎𝑧𝑏𝑥 − 𝑎𝑥𝑏𝑧) 𝑗 + (𝑎𝑥𝑏𝑦 − 𝑎𝑦𝑏𝑥) 𝑘
Multiplicação de Vetores – Produto vetorial
Resultado anterior

Prof. Me: Lucas Corrêa de Almeida
Exercício
1) Dado os vetores:
Faça:
a) 𝑎 . 𝑏
b) 𝑏 . 𝑎
c) 𝑎 𝑥 𝑏
d) 𝑏 𝑥 𝑎
𝑎 = 3 𝑖 + 2 𝑗 − 3 𝑘
𝑏 = 2 𝑖 − 2 𝑗 + 𝑘
𝑒
Prof. Me: Lucas Corrêa de Almeida
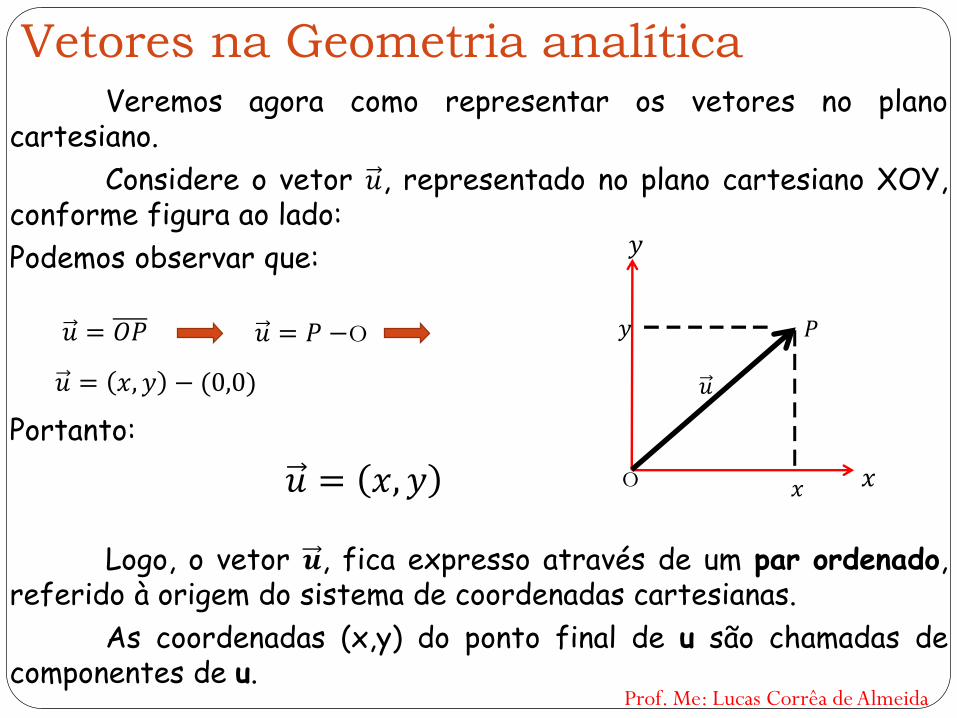
Vetores na Geometria analíticaVeremos agora como representar os vetores no plano
cartesiano.
Considere o vetor 𝑢, representado no plano cartesiano XOY,conforme figura ao lado:
Podemos observar que:
Portanto:
Logo, o vetor 𝒖, fica expresso através de um par ordenado,referido à origem do sistema de coordenadas cartesianas.
As coordenadas (x,y) do ponto final de u são chamadas decomponentes de u.
𝑢
𝑦
𝑥
𝑦
𝑥O
𝑃𝑢 = 𝑂𝑃 𝑢 = 𝑃 −O
𝑢 = 𝑥, 𝑦 − (0,0)
𝑢 = 𝑥, 𝑦

Prof. Me: Lucas Corrêa de Almeida
Exemplo
Dado os vetores 𝑎 = (4,3, −2) e 𝑏 = (−1,2,3), calcule para eles:
a) A soma.
b) Multiplicar o resultado da soma pelo escalar 5.
c) O produto escalar.
d) O produto vetorial.

Prof. Me: Lucas Corrêa de Almeida
Problemas propostosLivro: Paulo Winterle
Página: 40 – n°s: 1, 2, 3 e 5.
Página: 41 – n°s: 7 e 16
Página: 66 – n°s: 1, 2 e 3
Página: 87 – n°s: 1, 2 e 3

Prof. Me: Lucas Corrêa de Almeida
Produto mistoSejam três vetores 𝑢, 𝑣 e 𝑤:
𝑢 = (𝑥1, 𝑦1, 𝑧1) 𝑣 = (𝑥2, 𝑦2, 𝑧2) 𝑤 = (x3, y3, z3)
O produto misto de 𝑢, 𝑣 e 𝑤 é indicado por (𝑢, 𝑣, 𝑤) e é dado pelonúmero real:
Se o produto misto for nulo, significa que os vetores sãocoplanares.
Observe que a ordem dos vetores é importante. A cada troca deposição o produto misto muda de sinal.
𝑢 . 𝑣 x 𝑤 = 𝑢, 𝑣, 𝑤 = [u, v, w] =
𝑥1 𝑦1 𝑧1𝑥2 𝑦2 𝑧2𝑥3 𝑦3 𝑧3

Prof. Me: Lucas Corrêa de Almeida
Produto misto Propriedades:
i. 𝑢 , 𝑣 , 𝑤 = 0, se um deles é o vetor nulo ou se forem coplanares.
ii. 𝑢 , 𝑣 , 𝑤 = − 𝑣 , 𝑢 , 𝑤 = 𝑣 , 𝑤 , 𝑢 = …
iii. 𝑚𝑢 , 𝑣 , 𝑤 = 𝑚 𝑢 , 𝑣 , 𝑤
iv. 𝑢 + 𝑎, 𝑣 , 𝑤 = 𝑢 , 𝑣 , 𝑤 + 𝑎 , 𝑣 , 𝑤
Sobre a condição de coplanaridade entre 3 vetores:
𝑢 , 𝑣 , 𝑤 = 0 Vetores coplanares Lineram. dependente (LD)
𝑢 , 𝑣 , 𝑤 ≠ 0 Vetores não coplanares Linearm. Independente (LI)

Prof. Me: Lucas Corrêa de Almeida
Produto misto – interpretação geométrica
Geometricamente, o módulo do produto misto é igual aovolume do paralelepípedo de arestas determinadas pelos vetoresnão-coplanares 𝑢, 𝑣 e 𝑤.
𝑣
𝑤𝑢
𝑉𝑃 = 𝑢 , 𝑣 ,𝑤

Prof. Me: Lucas Corrêa de Almeida
Produto misto – interpretação geométrica
Exemplo:
Sejam os vetores 𝑢 = (3,𝑚,−2) , 𝑣 = (1,−1,0) e 𝑤 = (2,−1,2) .Calcular o valor de 𝑚 para que o volume do paralelepípedodeterminado por 𝑢, 𝑣 e 𝑤 seja 16 𝑢. 𝑣. (unidades de volume)

Prof. Me: Lucas Corrêa de Almeida
Produto misto – interpretação geométrica
Outra forma geométrica que podemos encontrar com oproduto misto é o volume do tetraedro.
Dado pela equação: 𝑣
𝑤
𝑢
𝑉𝑇 =𝑢 , 𝑣 , 𝑤
6

Prof. Me: Lucas Corrêa de Almeida
Produto misto – interpretação geométrica
Exemplo:
Sejam os pontos 𝐴(1,2,−1), 𝐵(5,0,1), 𝐶(2,−1,1) e 𝐷(6,1,−3), vérticesde um tetraedro. Calcular o volume do tetraedro, sabendo que 𝑢 =
𝐴𝐵, 𝑣 = 𝐴𝐶 e 𝑤 = 𝐴𝐷.
Prof. Me: Lucas Corrêa de Almeida
ExercíciosLivro: Paulo Winterle
Página: 99 – n°s: 1, 2, 3, 4 e 5.
Página: 100 – n°s: 6, 8 e 9.

Prof. Me: Lucas Corrêa de Almeida
A RETA

Prof. Me: Lucas Corrêa de Almeida
A Reta – equação vetorial da reta
Consideremos um ponto 𝐴(𝑥1, 𝑦1, 𝑧1) e um vetor não nulo 𝑣= 𝑎, 𝑏, 𝑐 . Só existe uma reta 𝑟 que passa por 𝐴 e tem direção de 𝑣.Um ponto 𝑃(𝑥, 𝑦, 𝑧) pertence a 𝑟 se e somente se, o vetor 𝐴𝑃 éparalelo a 𝑣, isto é:
𝐴𝑃 = 𝑡. 𝑣 (1)
Para algum real 𝑡, temos:
𝑃 − 𝐴 = 𝑡. 𝑣 ou P = A + 𝑡 𝑣 (2)
ou em coordenadas:
Qualquer uma dessas equações é denominada equaçãovetorial de r. O vetor 𝑣 é chamado vetor diretor da reta 𝑟 e 𝑡 édenominado parâmetro.
𝑥, 𝑦, 𝑧 = 𝑥1, 𝑦1, 𝑧1 + 𝑡 𝑎, 𝑏, 𝑐 (𝟑)

Prof. Me: Lucas Corrêa de Almeida
A Reta – equação vetorial da reta
Exemplo:
A reta r que passa por A(1,-1,4) e tem direção de 𝑣 = (2,3,2),tem equação vetorial, de acordo com (3):
Desta igualdade vem:
onde (𝑥, 𝑦, 𝑧) representa um ponto qualquer de r.
Se desejarmos obter pontos de r, basta atribuir valorespara t, Por exemplo, para 𝑡 = 1, obtêm-se:
E, portanto, 𝑃1 = (3,2,6) ∈ 𝑟
𝑥, 𝑦, 𝑧 = 1,−1,4 + 1 2,3,2𝑥, 𝑦, 𝑧 = (3,2,6)
𝑟: 𝑥, 𝑦, 𝑧 = 1,−1,4 + 𝑡 2,3,2 (4)
𝑥, 𝑦, 𝑧 = 𝑥1, y1, z1 + t a, b, c (3)

Prof. Me: Lucas Corrêa de Almeida
A Reta – equação vetorial da reta
De forma análoga.
para 𝑡 = 2, obtém-se 𝑥, 𝑦, 𝑧 = 1, −1,4 + 2 2,3,2 = 5,5,8
e, portanto, 𝑃2 5,5,8 ∈ 𝑟;
para 𝑡 = 3, obtém-se o ponto 𝑃3 7,8,10 ;
para 𝑡 = 0, obtém-se o próprio ponto 𝐴 1,−1,4 ;
para 𝑡 = −1, obtém-se o ponto 𝑃4 −1,−4,2 ;
E assim por diante. Se t assumir todos os valores reais, teremos todos osinfinitos pontos da reta.
O gráfico mostra os pontos obtidos com seus correspondentes parâmetros.

Prof. Me: Lucas Corrêa de Almeida
A Reta - equação vetorial da reta Observações:a) Vimos que cada real 𝑡 corresponde um ponto 𝑃 ∈ 𝑟 . A recíproca também éverdadeira, isso é, a cada 𝑃 ∈ 𝑟 corresponde um número real 𝑡, Por exemplo, sabe-seque o ponto 𝑃(5,5,8) pertence à reta.
𝑟: 𝑥, 𝑦, 𝑧 = 1, −1,4 + 𝑡 2,3,2
Logo, o ponto (5,5,8) é particular (𝑥, 𝑦, 𝑧) na equação (4) e, portanto, éverdadeira a afirmação:
(5,5,8) = 1,−1,4 + 𝑡 2,3,2 , para algum real 𝑡.
Desta igualdade, vem
(5,5,8) = 1,−1,4 + 𝑡 2,3,2 ou (4,6,4) = +𝑡 2,3,2 , e portanto 𝑡 = 2.
b) A equação (4) não é única equação vetorial de 𝑟. Existem, na verdade, infinitas,pois basta tomar outro ponto 𝑟 (em vez de 𝐴) ou outro qualquer não-nulo que sejamúltiplo de 𝑣. Por exemplo, a equação:
𝑥, 𝑦, 𝑧 = 1,−1,4 + 𝑡 4,6,4
É outra equação vetorial de 𝑟 onde se utilizou o vetor 2 𝑣 = (4,6,4) como vetordiretor em vez de 𝑣 2,3,2 .

Prof. Me: Lucas Corrêa de Almeida
Equações Paramétricas da RetaDa equação vetorial da reta
𝑥, 𝑦, 𝑧 = 𝑥1, 𝑦1, 𝑧1 + 𝑡 𝑎, 𝑏, 𝑐
ou ainda
𝑥, 𝑦, 𝑧 = 𝑥1 + at, 𝑦1 + 𝑏𝑡, 𝑧1 + 𝑐𝑡
pela condição de igualdade, obtém-se:
Esta equação é chamada equação paramétrica da reta.
𝑥 = 𝑥1 + 𝑎𝑡𝑦 = 𝑦1 + 𝑏𝑡𝑧 = 𝑧1 + 𝑐𝑡
Prof. Me: Lucas Corrêa de Almeida
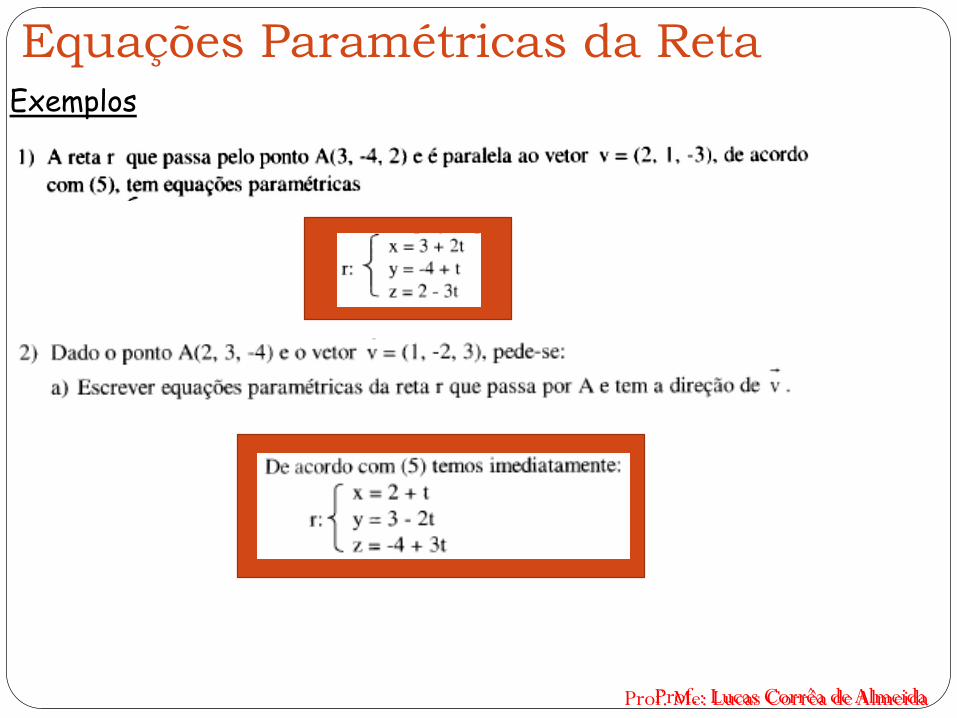
Equações Paramétricas da RetaExemplos
Prof.: Lucas Corrêa de Almeida

Prof. Me: Lucas Corrêa de Almeida
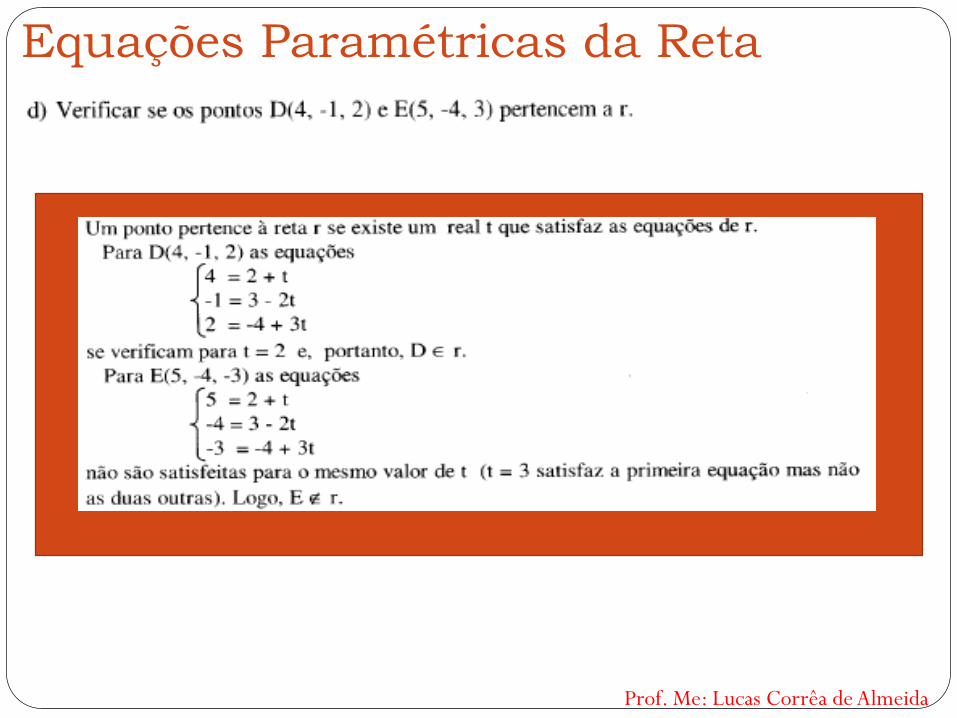
Equações Paramétricas da Reta
Prof.: Lucas Corrêa de Almeida
Prof. Me: Lucas Corrêa de Almeida
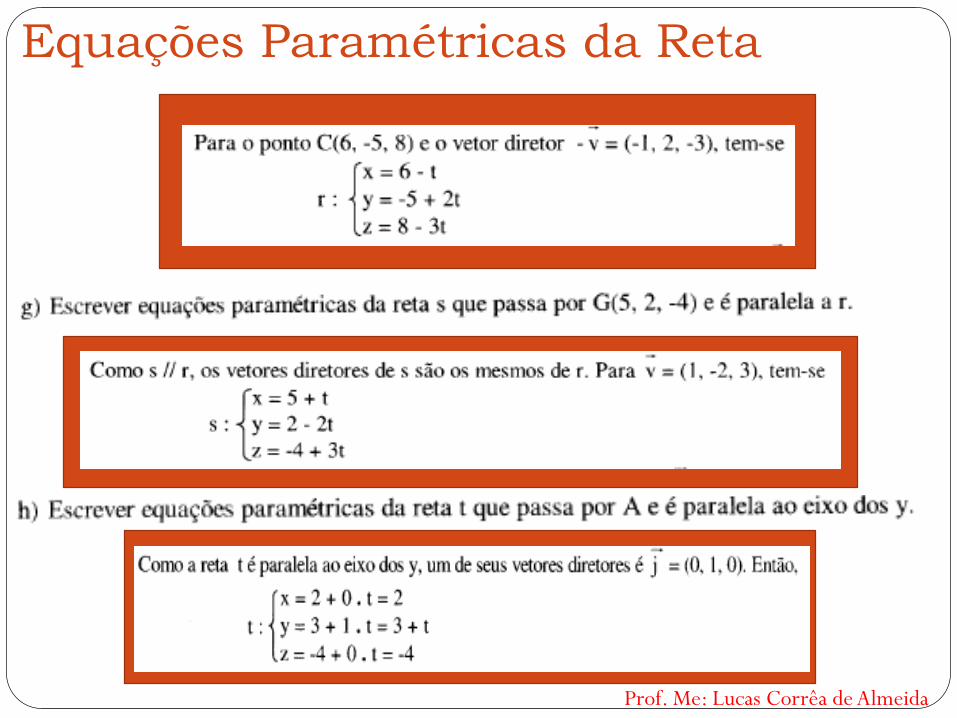
Equações Paramétricas da Reta

Prof. Me: Lucas Corrêa de Almeida
Equações Paramétricas da Reta
Prof. Me: Lucas Corrêa de Almeida
Equações Paramétricas da Reta
Prof. Me: Lucas Corrêa de Almeida
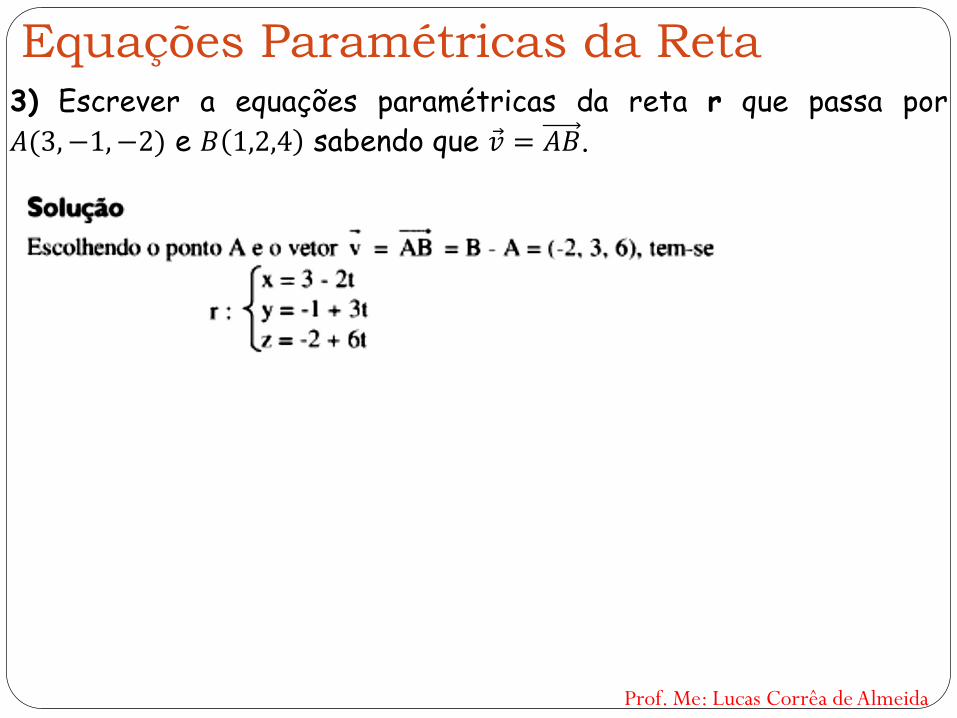
Equações Paramétricas da Reta3) Escrever a equações paramétricas da reta r que passa por𝐴(3,−1,−2) e 𝐵 1,2,4 sabendo que 𝑣 = 𝐴𝐵.

Prof. Me: Lucas Corrêa de Almeida
Equações paramétricas de um segmento de Reta
Consideremos a reta r do exemplo anterior e nela o segmento AB.
As equações paramétricas do segmento AB são as mesmas da reta r, porém,com o 𝟎 ≤ 𝒕 ≤ 𝟏.
Considere 𝐴(3, −1, −2) e 𝐵 1,2,4 a equação paramétrica do segmento derate AB será:
Observação:
A equação 𝑃 = 𝐴 + 𝑡(𝐵 − 𝐴) também pode ser expressa de modo equivalente por:
AB: 𝑥 = 3 − 2𝑡𝑦 = −1 + 3𝑡𝑧 = −2 + 6𝑡
Podemos observar que:para 𝑡 = 0, obtém-se o ponto A.para 𝑡 = 1, obtém-se o ponto B.e para 𝑡 entre 0 e 1, obtém-se os pontos entre A e B.
𝑃 = 𝑡𝐵 + 1 − 𝑡 𝐴

Prof. Me: Lucas Corrêa de Almeida
Equações Simétricas da RetaEquações simétricas da reta.
Das equações paramétricas
𝑥 = 𝑥1 + 𝑎𝑡 𝑦 = 𝑦1 + 𝑏𝑡 𝑧 = 𝑧1 + 𝑏𝑡
com 𝑎, 𝑏 e 𝑐 ≠ 0, temos:
𝑡 =𝑥 − 𝑥1
𝑎𝑡 =
𝑦 − 𝑦1
𝑏𝑡 =
𝑧 −𝑧1
𝑐
Como para cada ponto da reta corresponde um só valor para 𝒕,obtemos as igualdades:
𝑥 − 𝑥1𝑎
=𝑦 − 𝑦1
𝑏=𝑧 − 𝑧1𝑐
Sendo estas equações conhecidas como equações simétricas da reta.

Prof. Me: Lucas Corrêa de Almeida
Equações Simétricas da RetaExemplo:
Prof. Me: Lucas Corrêa de Almeida
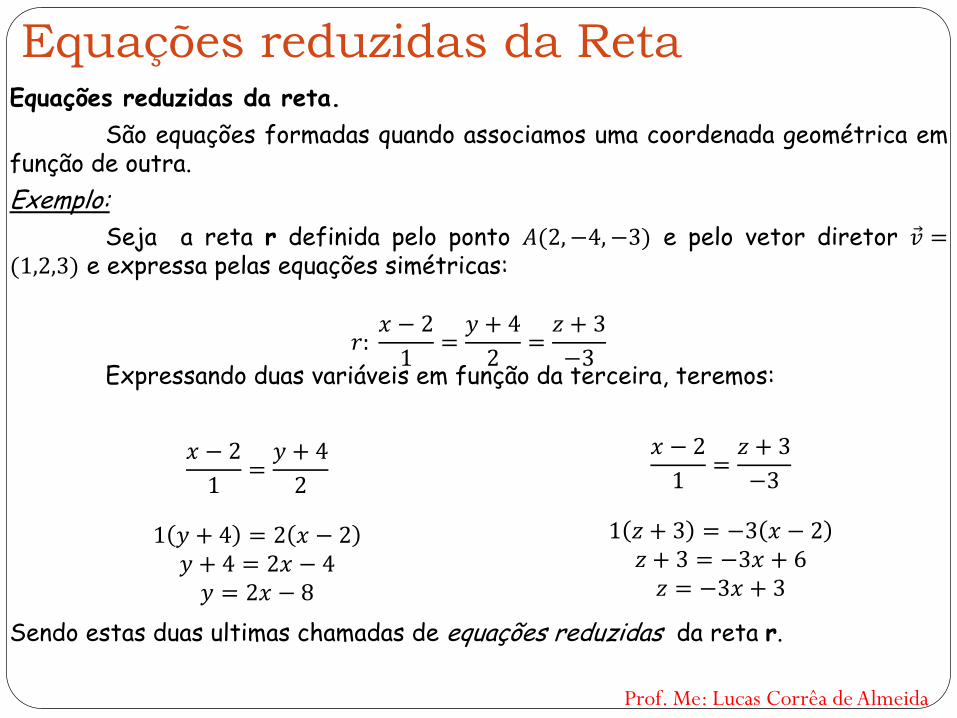
Equações reduzidas da RetaEquações reduzidas da reta.
São equações formadas quando associamos uma coordenada geométrica emfunção de outra.
Exemplo:
Seja a reta r definida pelo ponto 𝐴(2, −4, −3) e pelo vetor diretor 𝑣 =(1,2,3) e expressa pelas equações simétricas:
Expressando duas variáveis em função da terceira, teremos:
Sendo estas duas ultimas chamadas de equações reduzidas da reta r.
𝑥 − 2
1=𝑦 + 4
2
1 𝑦 + 4 = 2 𝑥 − 2𝑦 + 4 = 2𝑥 − 4𝑦 = 2𝑥 − 8
𝑥 − 2
1=𝑧 + 3
−3
1 𝑧 + 3 = −3 𝑥 − 2𝑧 + 3 = −3𝑥 + 6𝑧 = −3𝑥 + 3
𝑟:𝑥 − 2
1=𝑦 + 4
2=𝑧 + 3
−3

Prof. Me: Lucas Corrêa de Almeida
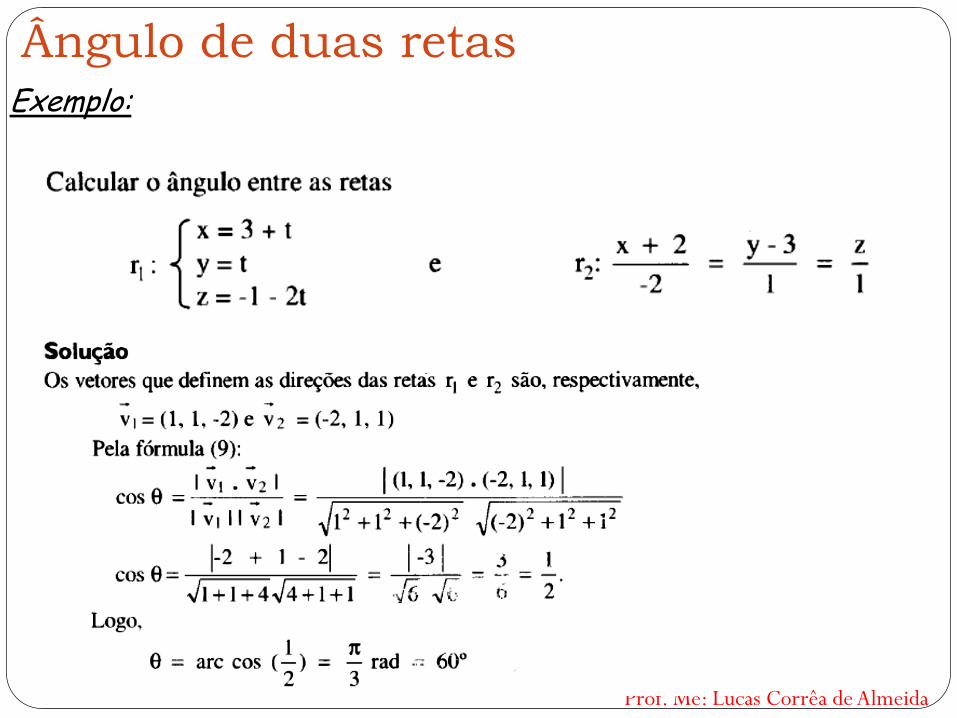
Ângulo de duas retasÂngulo de duas retas.
Observações:
Quando o ângulo entre as retas forem de 90° (𝑟1 ⊥ 𝑟2) o produto escalarentre elas é zero 𝑣1 . 𝑣2 = 0
Sejam as retas 𝑟1 e 𝑟2 com as direções 𝑣1 e 𝑣2, respectivamente.
Chama-se ângulo de duas retas 𝑟1 e 𝑟2o menor Ângulo de um vetor diretor de 𝑟1 e deum vetor diretor de 𝑟2 . Logo, sendo 𝜃 esteângulo, tem-se:
cos 𝜃 =𝑣1 .𝑣2
𝑣1 𝑣2, com 0 ≤ 𝜃 ≤
𝜋
2
Prof. Me: Lucas Corrêa de Almeida
Ângulo de duas retasExemplo:

Prof. Me: Lucas Corrêa de Almeida
Reta ortogonal a duas retasReta ortogonal a duas retas.
Podemos também determinar uma terceira reta 𝑟3 e direção 𝑣3 ,tomando como referências duas retas 𝑟1 e 𝑟2 não-paralelas com direções 𝑣1e 𝑣2.
Se 𝑣3 é ortogonal aos vetores 𝑣1 e 𝑣2, temos:
𝑣3 . 𝑣1 = 0
𝑣3 . 𝑣2 = 0
Quando temos esta condição de ortogonalidade entre o vetor 𝑣3 com osvetores 𝑣1 e 𝑣2, podemos dizer que 𝑣3 é resultado do produto vetorial entre 𝑣1 e 𝑣2.
𝑣3 = 𝑣1 𝑥 𝑣2

Prof. Me: Lucas Corrêa de Almeida
Reta ortogonal a duas retasExemplo:
OBS: veja o tópico “INTERCESÃO ENTRE DUAS RETAS” na página118.

Prof. Me: Lucas Corrêa de Almeida
ExercíciosLivro: Paulo Winterle
Página: 118 – n°s: 1, 4, 5, e 6.
Página: 119 – n°s: 8, 12 e 13.
Página: 120- – n°: 20

Prof. Me: Lucas Corrêa de Almeida
O PLANO

Prof. Me: Lucas Corrêa de Almeida
Equação geral do plano.
Observe o plano 𝜋 abaixo, contendo dois vetores 𝑛 e 𝐴𝑃:
Vemos que 𝑛 e 𝐴𝑃 são ortogonais, e sabemos que pelo produtoescalar entre eles o resulta é zero:
𝑛 ∙ 𝐴𝑃 = 0

Prof. Me: Lucas Corrêa de Almeida
Equação geral do plano.
Sabendo que 𝐴𝑃 = 𝑃 − 𝐴, temos:
Se 𝑛 = 𝑎, 𝑏, 𝑐 , 𝑃(𝑥, 𝑦, 𝑥) e 𝐴(𝑥1, 𝑦1, 𝑧1), teremos:
Se fizermos −𝑎𝑥1 − 𝑏𝑦1 − 𝑐𝑦3 = d , teremos a equação geral doplano:
𝑛 ∙ (𝑃 − 𝐴) = 0
𝑎, 𝑏, 𝑐 ∙ 𝑥, 𝑦, 𝑧 − 𝑥1, 𝑦1, 𝑧1 = 0 →
𝑎, 𝑏, 𝑐 ∙ 𝑥 − 𝑥1, 𝑦 − 𝑦1, 𝑧 − 𝑧2 = 0 →
𝑎 𝑥 − 𝑥1) + 𝑏(𝑦 − 𝑦1) + 𝑐(𝑧 − 𝑧2 = 0 →
𝑎𝑥 + 𝑏𝑦 + 𝑐𝑧 − 𝑎𝑥1 − 𝑏𝑦1 − 𝑐𝑦3 = 0
𝑎𝑥 + 𝑏𝑦 + 𝑐𝑧 + 𝑑 = 0

Prof. Me: Lucas Corrêa de Almeida
Equação geral do plano.Observações
a) Assim como 𝑛 = (𝑎, 𝑏, 𝑐) é um vetor normal a 𝜋, qualquer vetormúltiplo de 𝑛 é ortogonal (normal) ao plano.
b) Para obtermos os pontos de um plano, basta atribuir valores aduas variáveis e calcular o valor da outra equação dada.
Exemplo: considere a equação: 𝜋: 3𝑥 + 2𝑦 − 𝑧 + 1 = 0 , seatribuirmos valores para 𝑥 e 𝑦 como sendo 4 e 2 respectivamente,encontraremos valores para 𝑧. Neste caso 𝑧 será 9, e assim, o pontoencontrado será: (4, −2,9).
Prof. Me: Lucas Corrêa de Almeida
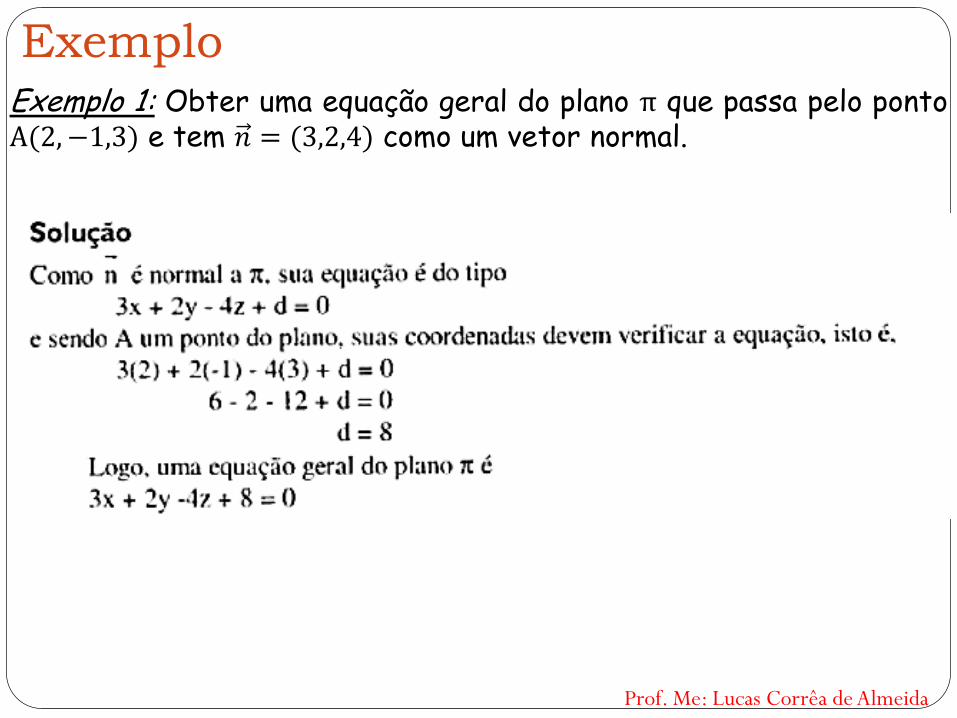
ExemploExemplo 1: Obter uma equação geral do plano π que passa pelo pontoA(2,−1,3) e tem 𝑛 = (3,2,4) como um vetor normal.

Prof. Me: Lucas Corrêa de Almeida
ExemploExemplo 2: Escreva uma equação geral do plano 𝜋 que passa peloponto 𝐴(2,1,3) e é paralelo ao plano
𝜋1: 3𝑥 − 4𝑦 − 2𝑧 + 5 = 0
Prof. Me: Lucas Corrêa de Almeida
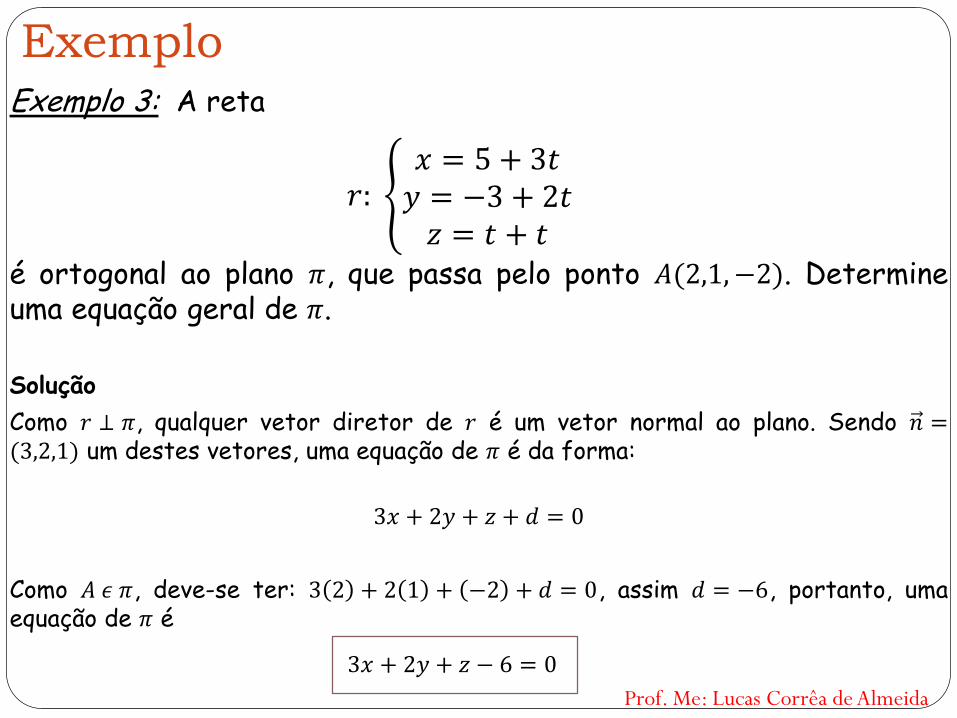
ExemploExemplo 3: A reta
é ortogonal ao plano 𝜋, que passa pelo ponto 𝐴(2,1,−2). Determineuma equação geral de 𝜋.
Solução
Como 𝑟 ⊥ 𝜋, qualquer vetor diretor de 𝑟 é um vetor normal ao plano. Sendo 𝑛 =(3,2,1) um destes vetores, uma equação de 𝜋 é da forma:
3𝑥 + 2𝑦 + 𝑧 + 𝑑 = 0
Como 𝐴 𝜖 𝜋, deve-se ter: 3 2 + 2 1 + −2 + 𝑑 = 0, assim 𝑑 = −6, portanto, umaequação de 𝜋 é
𝑟: 𝑥 = 5 + 3𝑡𝑦 = −3 + 2𝑡𝑧 = 𝑡 + 𝑡
3𝑥 + 2𝑦 + 𝑧 − 6 = 0

Prof. Me: Lucas Corrêa de Almeida
Equação vetorial e paramétrica do plano
Observe o plano 𝜋 abaixo, que possui um ponto 𝐴(𝑥0, 𝑦0, 𝑧0) e doisvetores 𝑢 = 𝑎1, 𝑏1, 𝑐1 e 𝑣 = (𝑎2, 𝑏2, 𝑐2) paralelos ao plano 𝜋, sendo 𝑢 e 𝑣 não-paralelos.
Para todo ponto 𝑝(𝑥, 𝑦, 𝑧) no plano, os vetores 𝐴𝑃 , 𝑢 e 𝑣 sãocoplanares. Mas para que 𝑃 pertença ao plano, deve existir doisnúmeros reais ℎ e 𝑡 tais que:
𝑃 − 𝐴 = ℎ𝑢 + 𝑡 𝑣

Prof. Me: Lucas Corrêa de Almeida
Equação vetorial e paramétrica do plano
ou𝑃 = 𝐴 + ℎ𝑢 + 𝑡 𝑣
Se substituirmos as coordenadas de cada pontos e vetor, teremos:
Está equação é denominada equação vetorial do plano 𝜋. Com 𝑢 e 𝑣 osvetores diretores.
𝑥, 𝑦, 𝑧 = 𝑥0, 𝑦0, 𝑧0 + ℎ 𝑎1, 𝑏1, 𝑐1 + 𝑡 𝑎2, 𝑏2, 𝑐2
Prof. Me: Lucas Corrêa de Almeida
Equação vetorial e paramétrica do plano
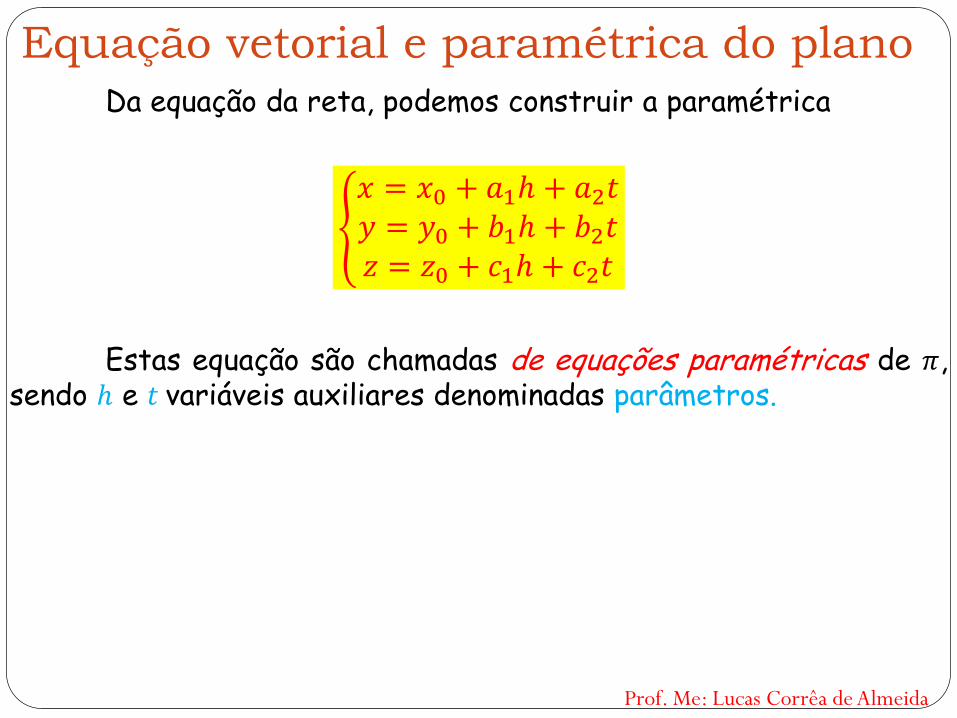
Da equação da reta, podemos construir a paramétrica
Estas equação são chamadas de equações paramétricas de 𝜋,sendo ℎ e 𝑡 variáveis auxiliares denominadas parâmetros.
𝑥 = 𝑥0 + 𝑎1ℎ + 𝑎2𝑡𝑦 = 𝑦0 + 𝑏1ℎ + 𝑏2𝑡𝑧 = 𝑧0 + 𝑐1ℎ + 𝑐2𝑡
Prof. Me: Lucas Corrêa de Almeida
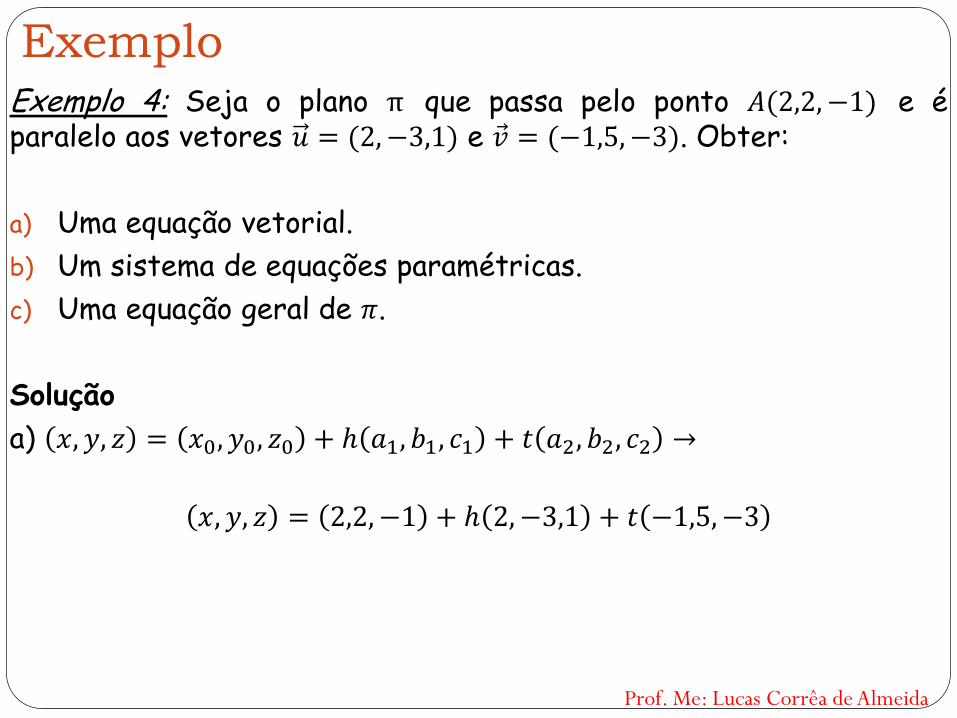
ExemploExemplo 4: Seja o plano π que passa pelo ponto 𝐴(2,2, −1) e éparalelo aos vetores 𝑢 = (2,−3,1) e 𝑣 = (−1,5,−3). Obter:
a) Uma equação vetorial.
b) Um sistema de equações paramétricas.
c) Uma equação geral de 𝜋.
Solução
a) 𝑥, 𝑦, 𝑧 = 𝑥0, 𝑦0, 𝑧0 + ℎ 𝑎1, 𝑏1, 𝑐1 + 𝑡 𝑎2, 𝑏2, 𝑐2 →
𝑥, 𝑦, 𝑧 = 2,2, −1 + ℎ 2,−3,1 + 𝑡 −1,5,−3
Prof. Me: Lucas Corrêa de Almeida
Exemplo
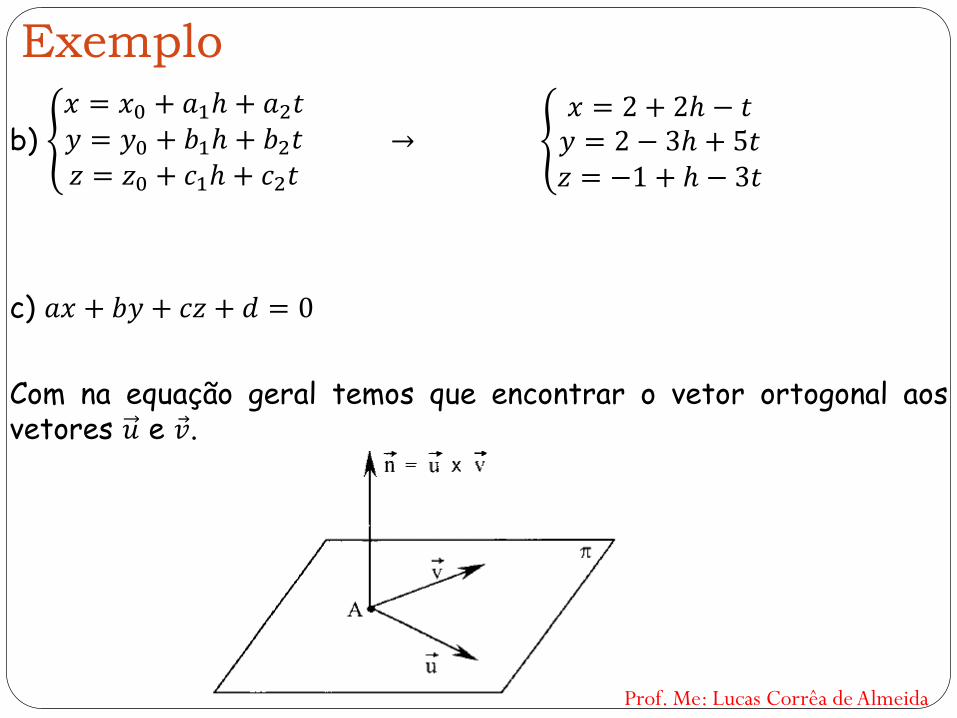
b) 𝑥 = 𝑥0 + 𝑎1ℎ + 𝑎2𝑡𝑦 = 𝑦0 + 𝑏1ℎ + 𝑏2𝑡𝑧 = 𝑧0 + 𝑐1ℎ + 𝑐2𝑡
→ 𝑥 = 2 + 2ℎ − 𝑡𝑦 = 2 − 3ℎ + 5𝑡𝑧 = −1 + ℎ − 3𝑡
c) 𝑎𝑥 + 𝑏𝑦 + 𝑐𝑧 + 𝑑 = 0
Com na equação geral temos que encontrar o vetor ortogonal aosvetores 𝑢 e 𝑣.

Prof. Me: Lucas Corrêa de Almeida
ExemploPara encontrar o vetor 𝑛, basta fazer o produto vetorial entre 𝑢 e 𝑣,pois como sabemos o produto vetorial entre dois vetores, resultanum vetor ortogonal aos dois. Assim:
𝑢 𝑥 𝑣 = 𝑛
𝑢 𝑥 𝑣 = 𝑖 𝑗 𝑘2 −3 1−1 5 −3
= (4,5,7)
Assim: 4𝑥 + 5𝑦 + 7𝑧 + 𝑑 = 0. Utilizando o ponto 𝐴, temos:
4 2 + 5 2 + 7 −1 + 𝑑 = 0 → 𝑑 = −11
Portanto, a equação geral de reta será:
4𝑥 + 5𝑦 + 7𝑧 − 11 = 0

Prof. Me: Lucas Corrêa de Almeida
Ângulo de dois planosConsidere os planos 𝜋1 e 𝜋2 com vetores normais 𝑛1 e 𝑛2,
respectivamente.
Chama-se ângulo de dois planos, o menor ângulo que um vetornormal de um plano forma o vetor normal o outro plano.
cos 𝜃 =𝑛1 ∙ 𝑛2𝑛1 𝑛2

Prof. Me: Lucas Corrêa de Almeida
ExemploExemplo 5: Determine o ângulo entre os planos:
𝜋1: 2𝑥 + 𝑦 − 𝑧 + 3 = 0 e 𝜋2: 𝑥 + 𝑦 − 4 = 0