análise sísmica de estruturas porticadas tridimensionais · numa primeira fase, obteve-se a...
TRANSCRIPT
Análise Sísmica de Estruturas Porticadas
Tridimensionais
Determinação da Interacção entre Esforços
André Filipe Valério Belejo
Dissertação para a obtenção do Grau de Mestre em
Engenharia Civil
Júri
Presidente: Professor Doutor Pedro Guilherme Sampaio Viola Parreira
Orientador: Professor Doutor José Paulo Baptista Moitinho de Almeida
Orientador: Professor Doutor Luís Manuel Coelho Guerreiro
Vogal: Professor Doutor João José Rio Tinto de Azevedo
Outubro de 2010

i
Agradecimentos
Tanto a execução desta Dissertação de Mestrado como todo o Curso de Engenharia Civil não
seria possível concluir sem a ajuda de algumas pessoas, as quais tenho que agradecer:
Aos Orientadores Doutor José Paulo Moitinho e Doutor Luís Guerreiro que se mostraram
sempre prontos e disponíveis para ajudar com o que fosse preciso, com muito apreço e
simpatia.
À minha família, principalmente os meus Pais, que sempre me apoiaram, e tudo fizeram
para que a realização do curso fosse possível.
À minha namorada e amigos, tanto aqueles que fiz em Lisboa como os do Entroncamento,
que fizeram com que fosse “fácil” a realização do curso.

iii
Resumo
Na presente dissertação é exposta uma metodologia alternativa à aplicação de espectros de
resposta aos resultados de uma Análise Modal com vista à determinação da combinação de
esforços de dimensionamento relativos à acção sísmica, através de uma análise linear dinâmica
no domínio da frequência. Trata-se de uma generalização da abordagem proposta para uma
estrutura bidimensional por (Ferreira, 2009).
Esta metodologia apresenta como principal contribuição, o desenvolvimento de um processo de
cálculo que contabiliza a interacção entre esforços. A consideração desta interacção é
potencialmente uma vantagem do método desenvolvido, quando comparado com os métodos de
sobreposição modal (Combinação Quadrática Completa, CQC, e Raiz Quadrada da Soma dos
Quadrados, RQSQ), visto que fornece informação sobre a relação entre os sinais dos esforços.
A aplicação deste método, que fora ilustrada através da análise de um pórtico plano, foi agora
efectuada na análise de alguns pórticos tridimensionais.
Numa primeira fase, obteve-se a resposta espectral da estrutura através do Método dos
Elementos Finitos (MEF) para a componente espacial e aplicou -se o processo de combinação de
esforços a uma secção, tendo-se obtido as várias superfícies de interacção entre os três esforços:
esforço normal e momentos flectores segundo as direcções principais de inércia, englobando
várias direcções de actuação da acção sísmica.
Compararam-se posteriormente os resultados obtidos com resultados extraídos da aplicação do
Método de Newmark (MN) na simulação de sismos aleatórios e com o método de sobreposição
modal CQC.
Obtiveram-se resultados algo conservativos, quando comparados com os extraídos dos outros
métodos. No entanto, desenvolvendo estudos mais aprofundados sobre certos aspectos do
método, este poderá no futuro vir a ser um procedimento a considerar no dimensionamento de
estruturas.
Palavras-Chave: Análise Dinâmica; Método dos Elementos Finitos; Resposta Espectral;
Interacção de Esforços; MN; CQC.

v
Abstract
An alternative methodology to Modal Analysis for obtaining the seismic design forces due to the
seismic action is presented in the present work. This methodology is based on a linear dynamic
analysis on the frequency domain, being a generalization of the approach proposal for a two-
dimensional structure.
The main contribution of the present work is the numerical procedure that accounts for the
interaction between internal forces. When compared to the methods of modal combination –
Complete Quadratic Combination (CQC) and Square Root of Sum of Squares (SRSS) – the
consideration of this interaction is potentially advantageous.
This method, which was previously illustrated by the analysis of a plane frame, has now been
applied to the analysis of some three-dimensional frame structures
Initially, we obtained the spectral response of the structure by the finite element method (FEM) for
the space component and applied the process of combining internal forces in one section,
obtaining surfaces of interaction between three internal forces: axial force and bending moments
according to the principal directions of inertia, encompassing various directions for the seismic
action.
After this, we compared the results with results from the application of the Newmark Method (NM)
in the simulation of random earthquakes and the CQC modal superposition method.
Conservative results were obtained when comparing with the results from the methods described,
however, developing more detailed studies on certain aspects of the method, it may become a
method to be considered in the design of structures.
Keywords: Dynamic Analysis; Finite Element Method; Spectral Response; Interaction between
Internal Forces; NM; CQC.

vii
Notação
i. Abreviaturas
CQC Combinação Quadrática Completa
MEF Método dos Elementos Finitos
MN Método de Newmark
Esforço Normal - Momento Flector
Esforço Normal - Momento Flector
Momento Flector - Momento Flector
Esforço Normal - Momento Flector - Momento Flector
RQSQ Raiz Quadrada da Soma dos Quadrados
R.S.A. Regulamento Segurança e Acções
ii. Simbologia
Parcela real da amplitude do deslocamento do grau de liberdade
Área da secção transversal de um elemento
Área da Secção transversal; Operador diferencial de compatibilidade;
Constante que depende das condições iniciais do problema
Amplitude de uma série harmónica
Parcela Imaginária da amplitude do deslocamento do grau de liberdade j
Produto do Operador diferencial de compatibilidade com a matriz das funções
de aproximação; Constante que depende das condições iniciais do problema
Parcela real da amplitude do deslocamento do grau de liberdade
Amortecimento de natureza viscosa do oscilador; Constante que depende das
condições iniciais do problema
[ Matriz de amortecimento da estrutura
Amortecimento Crítico
[ Matriz de amortecimento normalizada
Matriz que define as propriedades mecânicas do Elemento Finito; Constante
que depende das condições iniciais do problema
Deslocamentos nodais do elemento; Parcela Imaginária da amplitude do
deslocamento do grau de liberdade j
Vector dos deslocamentos no referencial local
viii
Vector dos deslocamentos generalizados
Parcela real da amplitude do deslocamento do grau de liberdade
Módulo de Elasticidade do oscilador
Módulo de elasticidade de um elemento finito
Valor esperado de
Efeito da acção sísmica a actuar em
Efeito da acção sísmica a actuar em
Forças de massa; Parcela Imaginária da amplitude do deslocamento do grau de
liberdade j
Frequência de excitação da estrutura, expressa em Hz
Frequência própria da estrutura (oscilador), expressa em Hz
Forças Nodais Equivalentes em cada elemento
Força aplicada, variável no tempo
Força aplicada, periódica no tempo
Configuração da acção, harmónica no tempo, aplicada à estrutura
Forças dissipativas de atrito ou amortecimento
Forças exteriores aplicadas
Forças de inércia
Forças de restituição ou ligação
Forças Nodais equivalentes às forças de massa equivalentes
Forças Nodais Equivalentes aplicadas na fronteira
Forças aplicadas directamente nos nós do elemento
Vector das Forças Nodais Equivalentes no Referencial local
Vector das Forças Nodais Equivalentes generalizadas
Vector de Forças Nodais equivalentes num elemento finito
Transformada de Fourier de
Inversa da transformada de Fourier de
Condição de Incidência nodal
Função de receptância
Transposto do conjugado da função de receptância
Matriz função de receptância
Matriz função de receptância normalizada
Vector do momento flector , calculado pelo MEF na secção da estrutura
Vector do momento flector , calculado pelo MEF nas diversas secções da
estrutura
ix
Vector do momento flector , calculado pelo MEF na secção da estrutura
Vector do momento flector , calculado pelo MEF nas diversas secções da
estrutura
Vector do esforço normal calculado pelo MEF na secção da estrutura
Vector do esforço normal calculado pelo MEF nas diversas secções da
estrutura
Inércia do oscilador segundo
Inércia do oscilador segundo
Inércia de Torção do Oscilador
Matriz identidade
Inércia segundo , de um elemento finito
Inércia segundo , de um elemento finito
Parcela imaginária do momento flector da secção decorrente dos
deslocamentos sofridos pela estrutura
Parcela imaginária do momento flector da secção decorrente dos
deslocamentos sofridos pela estrutura
Parcela imaginária do esforço normal da secção s , decorrente dos
deslocamentos sofridos pela estrutura
Rigidez do oscilador
Matriz de rigidez da estrutura
Matriz de rigidez de um elemento finito
Matriz de rigidez global da estrutura
Matriz de rigidez normalizada
Matriz de Rigidez do elemento finito no referencial local
Matriz de Rigidez do elemento finito no referencial geral
Comprimento do elemento estrutural
Comprimento do elemento finito
Massa do oscilador
Matriz de massa da estrutura
Matriz de massa normalizada
Momento Flector segundo o eixo principal de Inércia
Amplitude do momento flector
Momento Flector segundo o eixo principal de Inércia
Amplitude do momento flector
Momento flector numa qualquer secção da estrutura, num dado instante de
tempo
x
Momento flector na secção da estrutura, num dado instante de tempo
Momento flector numa qualquer secção da estrutura, num dado instante de
tempo
Momento flector na secção da estrutura, num dado instante de tempo
Valor esperado máximo do momento flector na secção , dada uma
frequência de excitação
Valor esperado máximo do momento flector na secção , dada uma
frequência de excitação devido a um sismo
Valor esperado do momento flector na secção , dada uma frequência de
excitação
Momento flector , para efeitos de cálculo, na secção , dada uma frequência
de excitação
Contribuição da frequência de excitação, para o momento flector de
dimensionamento na secção , devido à acção sísmica
Valor esperado máximo do momento flector na secção , dada uma
frequência de excitação
Valor esperado máximo do momento flector na secção , dada uma
frequência de excitação devido a um sismo
Valor esperado do momento flector na secção , dada uma frequência de
excitação
Momento flector , para efeitos de cálculo, na secção , dada uma frequência
de excitação
Contribuição da frequência de excitação, para o momento flector de
dimensionamento na secção , devido à acção sísmica
Matriz de massa consistente de um elemento finito
Esforço normal; Matriz de Equilíbrio na Fronteira
Amplitude do esforço normal
Número de direcções analisadas da elevação no espaço tridimensional
Número de direcções analisadas no plano de interacção no espaço
tridimensional
Valor esperado máximo do esforço normal na secção , dada uma frequência
de excitação
Valor esperado máximo do esforço normal na secção dada uma frequência de
excitação devido a um sismo
Valor esperado do esforço normal na secção , dada uma frequência de
excitação devido a um sismo
Esforço normal de dimensionamento na secção , devido à acção sísmica
Contribuição da frequência de excitação, para o esforço normal de
xi
dimensionamento na secção , devido à acção sísmica
Vector projecção segundo a direcção dos esforços no plano de interacção
Vector projecção segundo a direcção , dada a combinação de todas as
frequências de excitação
Frequência própria da estrutura (oscilador), expressa em
Frequência amortecida
Factor de participação do modo segundo a direcção
Deslocamento do oscilador
Configuração da resposta da estrutura, harmonicamente variável no tempo
Vector das amplitudes dos deslocamentos verificados nos graus de liberdade
da estrutura
Amplitude de oscilação da estrutura
Campo de deslocamento do oscilador
Vector dos deslocamentos verificados nos graus de liberdade da estrutura
Deslocamento inicial do oscilador
Configuração deformada do modo de vibração i
Deslocamentos em coordenadas modais da estrutura do modelo numérico
Vector dos deslocamentos verificados nos graus de liberdade da estrutura,
segundo as suas coordenadas modais
Solução particular da equação que define o movimento da estrutura
Deslocamento relativo, para uma coordenada da estrutura, em função do tempo
Deslocamento no solo em função do tempo
Deslocamento verificado no modo de vibração
Velocidade do oscilador
Vector das velocidades verificadas nos graus de liberdade da estrutura
Velocidade inicial do oscilador
Velocidade relativa, para uma coordenada da estrutura em função do tempo
Velocidade no solo em função do tempo
Velocidade verificada no modo de vibração
Aceleração do oscilador
Vector das acelerações verificados nos graus de liberdade da estrutura
Vector das acelerações iniciais verificados nos graus de liberdade da estrutura
Aceleração verificada no modo de vibração
Aceleração relativa, para uma coordenada da estrutura em função do tempo
Aceleração no solo em função do tempo
Vector de acelerações no solo
xii
Auto matriz função autocorrelação de excitação
Auto matriz função de autocorrelação de excitação dada uma resposta da
estrutura
Auto matriz função autocorrelação de resposta da estrutura
Parcela real do momento flector da secção da estrutura, dada uma
frequência de excitação
Parcela real do momento flector da secção s da estrutura, dada uma
frequência de excitação
Parcela real do esforço normal da secção s da estrutura, dada uma frequência
de excitação
Parcela real do momento flector da secção , decorrente dos deslocamentos
sofridos pela estrutura
Parcela real do momento flector da secção , decorrente dos deslocamentos
sofridos pela estrutura
Parcela real do esforço normal da secção , decorrente dos deslocamentos
sofridos pela estrutura
Área da Secção do Elemento
Valor do espectro de resposta de acelerações, para a frequência p e
coeficiente de amortecimento
Auto matriz função densidade espectral de potência da excitação
Auto matriz função de densidade espectral de potências da excitação dada uma
resposta da estrutura
Vector função de densidade espectral do momento flector das diversas
secções da estrutura
Vector função da máxima densidade espectral do momento flector na
secção da estrutura
Vector função de densidade espectral do momento flector das diversas
secções da estrutura
Vector função da máxima densidade espectral do momento flector na
secção da estrutura
Vector função de densidade espectral do esforço normal das diversas secções
da estrutura
Vector função da máxima densidade espectral do esforço normal na secção
da estrutura
Auto matriz função de densidade espectral de resposta da estrutura
Duração da acção sísmica
Instante inicial
Forças de Fronteira
xiii
Período de oscilação
Período de oscilação amortecido
Matriz de Transformação
Deslocamento longitudinal de um elemento
Campo de deslocamento longitudinal de um elemento
Campo de deslocamentos longitudinal no espaço e no tempo de um elemento
Configuração deformada da estrutura
Vector do modo de vibração da estrutura
Matriz modal
Posição no instante
Velocidade no instante
Aceleração no instante
Terceira Derivada de no instante
Constante interveniente na definição da matriz de amortecimento segundo
Caugnhey
Aceleração equivalente que surge na base da estrutura, dada uma frequência
de excitação , devido a um sismo, que origina
Aceleração equivalente que surge na base da estrutura, dada uma frequência
de excitação , devido a um sismo, que origina
Aceleração equivalente que surge na base da estrutura, dada uma frequência
de excitação , devido a um sismo, que origina
Constante interveniente na definição da matriz de amortecimento segundo
Caugnhey
Factor de Amplificação Dinâmica
Constante interveniente no Método de Newmark
Quociente entre as frequências e
Constante de Euler
Constante interveniente no Método de Newmark
Intervalo de tempo
Intervalo de direcções analisadas que medem a elevação no espaço
tridimensional
Intervalo de direcções analisadas no plano no espaço tridimensional
Intervalo de frequências
Vector dos deslocamentos de um elemento finito obtido através do MEF
Coeficiente de amortecimento
Coeficiente de amortecimento do modo i
Valor esperado do máximo de uma função de densidades de probabilidades
xiv
Valor esperado do máximo da função de densidade espectral do momento
flector
Valor esperado do máximo da função de densidade espectral do momento
flector
Valor esperado do máximo da função de densidade espectral do esforço normal
Coeficiente de correlação entre as frequências próprias e
Densidade de uma barra por unidade de comprimento
Densidade de um elemento finito por unidade de comprimento
Estado de tensão no elemento
Instante de tempo
Direcção que mede a elevação no espaço tridimensional
Vector do modo de vibração normalizado em relação à matriz de massa
Matriz modal normalizada em relação à matriz de massa
Matriz das funções de Aproximação
Função de forma do elemento finito associado ao deslocamento generalizado
Fase de uma série harmónica
Direcção plano no espaço tridimensional
Frequência de passagens ascendentes pelo nível “0”
Frequência de excitação
Frequência máxima de excitação
Frequência discreta
Frequência discreta
Frequência correspondente a cada série harmónica
Vector de valores unitários segundo a direcção e zero nas restantes direcções
Matriz de acelerações unitárias no solo segundo as diferentes direcções
xv
Índice Geral
Resumo ............................................................................................................................................ iii
Abstract ............................................................................................................................................. v
Notação ........................................................................................................................................... vii
Índice Geral ..................................................................................................................................... xv
Índice de Figuras ........................................................................................................................... xix
Índice de Tabelas ........................................................................................................................ xxiii
Capítulo 1 - Introdução ................................................................................................................ 1
1.1 Contextualização ................................................................................................................. 1
1.2 Objectivo .............................................................................................................................. 1
1.3 Organização ......................................................................................................................... 2
Capítulo 2 - Generalidades ......................................................................................................... 3
2.1 Dinâmica de Estruturas ........................................................................................................ 3
2.1.1 Equilíbrio Estático e Equilíbrio Dinâmico ...................................................................... 3
2.1.2 Solicitações em Regime Dinâmico ............................................................................... 4
2.1.3 Osciladores Lineares de Um grau de Liberdade .......................................................... 5
2.1.3.1 Oscilação em Regime Livre .................................................................................. 6
2.1.3.2 Oscilação em Regime Forçado ............................................................................. 8
2.1.3.2.1 Acções Harmónicas ............................................................................................ 9
2.1.3.2.2 Acções Periódicas ............................................................................................. 10
2.1.3.2.3 Excitações Estocásticas .................................................................................... 11
2.1.4 Oscilador Linear de vários graus de Liberdade .......................................................... 13
2.1.4.1 Análise Modal ...................................................................................................... 13
2.1.4.1.1 Frequências Próprias e Modos de Vibração ..................................................... 14
2.1.4.1.2 Condições de Ortogonalidade ........................................................................... 15
2.1.4.1.3 Normalização dos modos de vibração .............................................................. 16
2.1.4.1.4 Definição de Coordenadas Modais ................................................................... 18
2.1.5 Resposta de Osciladores de Vários Graus de Liberdade .......................................... 20
2.1.5.1 Oscilação em Regime Livre ................................................................................ 20
2.1.5.2 Oscilação em Regime Forçado ........................................................................... 21
2.1.5.2.1 Resposta a uma Excitação Harmónica ............................................................. 21
2.1.5.2.2 Resposta a uma Excitação Periódica ............................................................... 22
xvi
2.2 Acção Sísmica ................................................................................................................... 22
2.2.1 Resposta a um conjunto de Acelerações da Base ..................................................... 22
2.2.2 Análise Sísmica por Espectros de Resposta .............................................................. 24
2.2.3 Métodos de Sobreposição Modal ............................................................................... 25
2.3 Combinação de Esforços ................................................................................................... 27
Capítulo 3 - Métodos Numéricos .............................................................................................. 29
3.1 Método dos Elementos Finitos ........................................................................................... 29
3.1.1 Método dos Elementos Finitos aplicado a um pórtico tridimensional......................... 29
3.1.1.1 Definição dos Referenciais .................................................................................. 29
3.1.1.2 Graus de Liberdade ............................................................................................. 30
3.1.1.3 Matriz de Rigidez Elementar ............................................................................... 31
3.1.1.4 Vector de Forças Nodais Equivalentes ............................................................... 34
3.1.1.5 Transformação de Coordenadas ......................................................................... 35
3.1.1.6 Equação Resolvente ........................................................................................... 36
3.1.2 Método dos Elementos Finitos para uma Análise Temporal ...................................... 37
3.2 Método de Newmark .......................................................................................................... 39
3.2.1 Geração do Sismo e a sua aplicação no MN ............................................................. 41
3.2.1.1 Geração do Sismo ............................................................................................... 41
3.2.1.2 Aplicação no MN ................................................................................................. 43
Capítulo 4 - Modelo Numérico – Implementação para o caso tridimensional ..................... 45
4.1 Combinação dos três esforços ....................................................................... 45
4.1.1 Análise da Interacção . ............................................................................. 45
4.1.2 Cálculo das superfícies de Interacção ............................................. 48
4.1.3 Combinação das Curvas de Interacção ........................................... 52
4.2 Definição da Acção Dinâmica ............................................................................................ 52
4.2.1 Resposta da Estrutura ................................................................................................ 52
4.2.2 Calculo dos esforços devido à acção dinâmica .......................................................... 53
Capítulo 5 - Casos de estudo ................................................................................................... 59
5.1 Pórtico Regular .................................................................................................................. 59
5.1.1 Definição de Modelo ................................................................................................... 59
5.1.2 Análise Modal ............................................................................................................. 61
5.1.2.1 Programa em Matlab ........................................................................................... 61
5.1.2.2 Programa em SAP2000 ....................................................................................... 62
5.1.3 Resposta para uma Direcção fixa .............................................................................. 64
5.1.3.1 Interacção de Esforços Resultante da Modelação da Acção
Sísmica a actuar na Estrutura ............................................................................................... 64
xvii
5.1.3.1.1 Caracterização da acção Dinâmica .................................................................. 64
5.1.3.1.2 Relação entre o Valor Máximo Esperado e o Valor Esperado da Resposta da
Estrutura, dado um Sismo ................................................................................................. 64
5.1.3.1.3 Determinação das Curvas de Interacção ................................... 65
5.1.3.1.4 Combinação das Diferentes Curvas de Interacção .................... 66
5.1.3.1.5 Resultados ........................................................................................................ 66
5.1.3.2 Resultados obtidos da Simulação através do MN .............................................. 72
5.1.3.2.1 Estudo Estatístico do Número de Amostras viável ........................................... 72
5.1.3.2.2 Resultados da Simulação ................................................................................. 75
5.1.3.3 Resultados obtidos do método CQC (SAP2000) ................................................ 76
5.1.4 Curvas de Dimensionamento para sismo com direcção desconhecida ..................... 77
5.1.5 Adição de um piso ...................................................................................................... 80
5.1.5.1 Resposta para uma Direcção fixa ....................................................................... 81
5.1.5.2 Resultados obtidos da Simulação através do MN .............................................. 88
5.1.5.3 Resultados obtidos do método CQC (SAP2000) ................................................ 88
5.1.5.4 Curvas de Dimensionamento para sismo com direcção desconhecida ............. 89
5.2 Pórtico Irregular ................................................................................................................. 91
5.2.1 Resposta para uma Direcção fixa .............................................................................. 93
5.2.1.1 Projecção em e ................................................................................... 93
5.2.1.2 Simulação através do MN ................................................................................. 102
5.2.1.3 Resultados obtidos do método CQC (SAP2000) .............................................. 102
5.2.2 Curvas de Dimensionamento para sismo com direcção desconhecida ................... 103
Capítulo 6 - Síntese e Análise dos Resultados obtidos pelos vários métodos ................ 107
6.1 Superfícies de Interacção dos Esforços .......................................................................... 107
6.2 Comparação entre os vários métodos ............................................................................. 108
Capítulo 7 - Conclusões .......................................................................................................... 113
7.1 Considerações Finais ...................................................................................................... 113
7.2 Considerações sobre o método desenvolvido ................................................................. 113
7.3 Limitações do Método do Numérico ................................................................................ 114
7.4 Desenvolvimentos Futuros .............................................................................................. 115
Referências Bibliográficas .......................................................................................................... 117
Anexos ................................................................................................................................................ i
i. Definição da Estrutura ............................................................................................................... i
ii. Geração da Estrutura ............................................................................................................... vi
xviii
iii. Frequências Próprias, Modos de Vibração e Obtenção dos Esforços pelo MEF ......... vii
iv. Determinação das Superfícies de Interacção .......................................... xvi
v. Simulação através do Método de Newmark ........................................................................ xxi
xix
Índice de Figuras
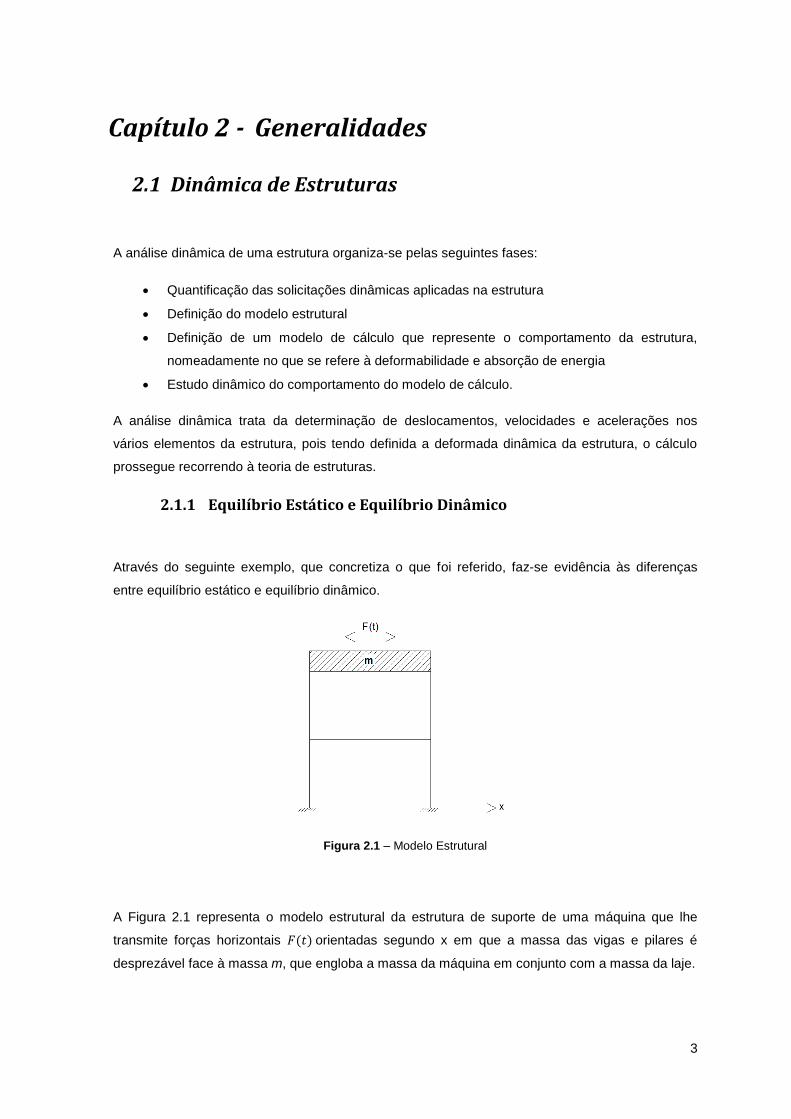
Figura 2.1 – Modelo Estrutural .......................................................................................................... 3
Figura 2.2 – Oscilador de um grau de Liberdade .............................................................................. 5
Figura 2.3 – a) Movimento oscilatório de amortecimento sobre-crítico. b) Movimento oscilatório de
amortecimento sub-crítico. c) Movimento oscilatório de amortecimento crítico (Ferreira, 2009)8
Figura 2.4 – Normalização do valor esperado máximo em função do número de valores
ascendentes no nível “0”(Clough & Penzien, 1995) ................................................................. 13
Figura 2.5 – Eixos locais de uma barra ........................................................................................... 27
Figura 2.6 - Esforços actuantes numa barra ................................................................................... 27
Figura 3.1 – Referencial Local e Geral do Elemento de Barra (Azevedo Á. , 2003) ...................... 29
Figura 3.2 – Graus de Liberdade no nó de um Elemento de Barra (Azevedo Á. , 2003) ............... 30
Figura 3.3 – Forças Generalizadas que correspondem aos graus de liberdade (Azevedo Á. , 2003)
.................................................................................................................................................. 31
Figura 3.4 – Graus de Liberdade e Respectivas Forças num elemento de Barra (Azevedo Á. ,
2003) ......................................................................................................................................... 31
Figura 3.5 – Espectro de Potências dada a ocorrência de um sismo do tipo I num solo do tipo II 42
Figura 3.6 – Acelerograma obtido duma acção sísmica do tipo I num solo de fundação do tipo II de
acordo com o R.S.A. ................................................................................................................. 43
Figura 4.1 - Curva representativa, no plano complexo, de , dada uma frequência de excitação
.............................................................................................................................................. 47
Figura 4.2 – Sistema de coordenadas em que mede a orientação no plano “ ” e a
elevação .................................................................................................................................... 49
Figura 4.3 – Definição de um conjunto de esforços numa dada superfície de
interacção ....................................................................................................... 50
Figura 4.4 – Contribuição de uma frequência de excitação , para o Esforço Normal de
dimensionamento de uma secção , na ocorrência de um sismo ............................................ 56
Figura 5.1 – Pórtico Tridimensional de um piso .............................................................................. 60
Figura 5.2 – Eixos Locais de uma Barra ......................................................................................... 61
Figura 5.3 - Frequências Próprias e respectivos modos de Vibração obtidos através do Programa
em Matlab.................................................................................................................................. 62
Figura 5.4 – Frequências Próprias e respectivos modos de Vibração obtidos através do SAP2000
.................................................................................................................................................. 63
Figura 5.5 – Direcções de actuação da acção sísmica estudadas ................................................. 64
Figura 5.6 – Superfície de Interacção para a acção sísmica a actuar a 0˚ [Newtons e
Newtons.metro] ......................................................................................................................... 67
Figura 5.7 – Superfície de Interacção para a acção sísmica a actuar a 30˚ [Newtons e
Newtons.metro] ......................................................................................................................... 68
xx
Figura 5.8 - Superfície de Interacção para a acção sísmica a actuar a 45˚ [Newtons e
Newtons.metro] ......................................................................................................................... 69
Figura 5.9 - Superfície de Interacção para a acção sísmica a actuar a 60˚ [Newtons e
Newtons.metro] ......................................................................................................................... 70
Figura 5.10 - Superfície de Interacção para a acção sísmica a actuar segundo y
[Newtons e Newtons.metro] ...................................................................................................... 71
Figura 5.11 – Interacção do par de Esforços para o sismo a actuar em qualquer direcção
[Newtons e Newtons.metro] ...................................................................................................... 78
Figura 5.12 – Interacção do par de Esforços para o sismo a actuar em qualquer direcção
[Newtons e Newtons.metro] ...................................................................................................... 78
Figura 5.13 – Interacção do par de Esforços para o sismo a actuar em qualquer direcção
[Newtons.metro] ........................................................................................................................ 79
Figura 5.14 - Superfície de interacção de esforços para o sismo a actuar em
qualquer direcção [Newtons e Newtons.metro] ........................................................................ 79
Figura 5.15 – Pórtico Tridimensional Regular com dois pisos ........................................................ 80
Figura 5.16 – Primeiros modos de Vibração do Pórtico de 2 pisos obtidos através do programa em
Matlab ........................................................................................................................................ 81
Figura 5.17 - Superfície de Interacção para a acção sísmica a actuar a 0˚ no Pórtico
de 2 pisos [Newtons e Newtons.metro]..................................................................................... 83
Figura 5.18 - Superfície de Interacção para a acção sísmica a actuar a 30˚ no pórtico
de 2 pisos [Newtons e Newtons.metro]..................................................................................... 84
Figura 5.19 - Superfície de Interacção para a acção sísmica a actuar a 45˚ no pórtico
de 2 pisos [Newtons e Newtons.metro]..................................................................................... 85
Figura 5.20 - Superfície de Interacção para a acção sísmica a actuar a 60˚ no pórtico
de 2 pisos [Newtons e Newtons.metro]..................................................................................... 86
Figura 5.21 - Superfície de Interacção para a acção sísmica a actuar a 60˚ no pórtico
de 2 pisos [Newtons e Newtons.metro]..................................................................................... 87
Figura 5.22 - Interacção do par de Esforços para o sismo a actuar em qualquer direcção
no pórtico de 2 pisos [Newtons e Newtons.metro] .................................................................... 89
Figura 5.23 - Interacção do par de Esforços para o sismo a actuar em qualquer direcção
no pórtico de 2 pisos [Newtons e Newtons.metro] .................................................................... 90
Figura 5.24 - Interacção do par de Esforços para o sismo a actuar em qualquer direcção
no pórtico de 2 pisos [Newtons.metro] ...................................................................................... 90
Figura 5.25 - Superfície de interacção de esforços em qualquer direcção no pórtico
de 2 pisos [Newtons e Newtons.metro]..................................................................................... 91
Figura 5.26 – Pórtico simétrico com os pilares a apresentar diferentes direcções principais de
Inércia e algumas massas concentradas .................................................................................. 92
Figura 5.27 – Frequências próprias e respectivos modos de vibração do pórtico irregular ........... 92
Figura 5.28 - Superfície de Interacção para a acção sísmica a actuar a 0˚ no Pórtico
Irregular [Newtons e Newtons.metro] ........................................................................................ 94
xxi
Figura 5.29 - Superfície de Interacção para a acção sísmica a actuar a 30˚ no Pórtico
Irregular [Newtons e Newtons.metro] ....................................................................................... 95
Figura 5.30 - Superfície de Interacção para a acção sísmica a actuar a 45˚ no Pórtico
Irregular [Newtons e Newtons.metro] ....................................................................................... 96
Figura 5.31 - Superfície de Interacção para a acção sísmica a actuar a 60˚ no Pórtico
Irregular [Newtons e Newtons.metro] ....................................................................................... 97
Figura 5.32 - Superfície de Interacção para a acção sísmica a actuar a 60˚ no Pórtico
Irregular [Newtons e Newtons.metro] ....................................................................................... 98
Figura 5.33 - Superfície de Interacção para a acção sísmica a actuar a 120˚ no
Pórtico Irregular [Newtons e Newtons.metro] ........................................................................... 99
Figura 5.34 - Superfície de Interacção para a acção sísmica a actuar a 135˚ no
Pórtico Irregular [Newtons e Newtons.metro] ......................................................................... 100
Figura 5.35 - Superfície de Interacção para a acção sísmica a actuar a 150˚ no
Pórtico Irregular [Newtons e Newtons.metro] ......................................................................... 101
Figura 5.36 - Interacção do par de Esforços para o sismo a actuar em qualquer direcção
no pórtico irregular [Newtons e Newtons.metro] ..................................................................... 104
Figura 5.37 - Interacção do par de Esforços para o sismo a actuar em qualquer direcção
no pórtico irregular [Newtons e Newtons.metro] ..................................................................... 104
Figura 5.38 - Interacção do par de Esforços para o sismo a actuar em qualquer direcção
no pórtico irregular [Newtons.metro] ....................................................................................... 105
Figura 5.39 - Superfície de interacção de esforços em qualquer direcção no pórtico
irregular [Newtons e Newtons.metro] ...................................................................................... 105

xxiii
Índice de Tabelas
Tabela 5.1 – Primeiras Frequências Próprias da Estrutura obtidas através do Programa em Matlab
.................................................................................................................................................. 62
Tabela 5.2 - Primeiras Frequências Próprias da Estrutura obtidas através do SAP2000............... 63
Tabela 5.3 – Valores obtidos de , e para as direcções de actuação do sismo em
estudo ........................................................................................................................................ 65
Tabela 5.4 – Valores limites dos Esforços para a actuação da acção sísmica a 0˚ ....................... 67
Tabela 5.5 - Valores limites dos Esforços para a actuação da acção sísmica a 30˚ ...................... 68
Tabela 5.6 - Valores limites dos Esforços para a actuação da acção sísmica a 45˚ ...................... 69
Tabela 5.7 - Valores limites dos Esforços para a actuação da acção sísmica a 60˚ ...................... 70
Tabela 5.8 - Valores limites dos Esforços para a actuação da acção sísmica segundo y .............. 71
Tabela 5.9 – Valores do Esforço Normal obtidos através da Simulação, variando o número de
amostras.................................................................................................................................... 72
Tabela 5.10 - Valores do Momento Flector M1 obtidos através da Simulação, variando o número de
amostras.................................................................................................................................... 73
Tabela 5.11 - Valores do Momento Flector M2 obtidos através da Simulação, variando o número de
amostras.................................................................................................................................... 74
Tabela 5.12 – Valores máximos dos esforços obtidos da Simulação através do MN ..................... 76
Tabela 5.13 – Valores obtidos da combinação modal CQC aplicada no SAP2000 ........................ 77
Tabela 5.14 - Primeiras Frequências Próprias do Pórtico de 2 Pisos obtidas através do Matlab .. 81
Tabela 5.15 - Valores limites dos Esforços para a actuação da acção sísmica a 0˚ no pórtico de 2
pisos .......................................................................................................................................... 83
Tabela 5.16 - Valores limites dos Esforços para a actuação da acção sísmica a 30˚ no pórtico de 2
pisos .......................................................................................................................................... 84
Tabela 5.17 - Valores limites dos Esforços para a actuação da acção sísmica a 45˚ no pórtico de 2
pisos .......................................................................................................................................... 85
Tabela 5.18 - Valores limites dos Esforços para a actuação da acção sísmica a 60˚ no pórtico de 2
pisos .......................................................................................................................................... 86
Tabela 5.19 - Valores limites dos Esforços para a actuação da acção sísmica a 90˚ no pórtico de 2
pisos .......................................................................................................................................... 87
Tabela 5.20 - Valores máximos dos esforços obtidos da Simulação através do MN para o pórtico
de 2 pisos .................................................................................................................................. 88
Tabela 5.21 - Valores obtidos da combinação modal CQC aplicada no SAP2000 ......................... 88
Tabela 5.22 - Valores limites dos Esforços para a actuação da acção sísmica a 0˚ no Pórtico
Irregular ..................................................................................................................................... 94
Tabela 5.23 - Valores limites dos Esforços para a actuação da acção sísmica a 30˚ no Pórtico
Irregular ..................................................................................................................................... 95
Tabela 5.24 - Valores limites dos Esforços para a actuação da acção sísmica a 45˚ no Pórtico
Irregular ..................................................................................................................................... 96
xxiv
Tabela 5.25 - Valores limites dos Esforços para a actuação da acção sísmica a 60˚ no Pórtico
Irregular ..................................................................................................................................... 97
Tabela 5.26 - Valores limites dos Esforços para a actuação da acção sísmica a 90˚ no Pórtico
Irregular ..................................................................................................................................... 98
Tabela 5.27 - Valores limites dos Esforços para a actuação da acção sísmica a 120˚ no Pórtico
Irregular ..................................................................................................................................... 99
Tabela 5.28 - Valores limites dos Esforços para a actuação da acção sísmica a 135˚ no Pórtico
Irregular ................................................................................................................................... 100
Tabela 5.29 - Valores limites dos Esforços para a actuação da acção sísmica a 150˚ no Pórtico
Irregular ................................................................................................................................... 101
Tabela 5.30 - Valores máximos dos esforços obtidos da Simulação através do MN para o Pórtico
irregular ................................................................................................................................... 102
Tabela 5.31 - Valores obtidos da combinação modal CQC aplicada no SAP2000 ....................... 103
Tabela 6.1 – Síntese dos Resultados obtidos pelos vários métodos ............................................ 110
Tabela 6.2 – Diferenças medidas em relação à análise direccional de esforços .......................... 111
Tabela 6.3 – Diferença média de cada método em relação à análise direccional de Esforços .... 111
1
Capítulo 1 - Introdução
1.1 Contextualização
A Dinâmica de estruturas é uma das matérias no âmbito da Engenharia Civil, que devido à
implementação de novos métodos de cálculo com recurso à computação, têm tido uma enorme
evolução nos últimos anos.
Em particular, a engenharia sísmica tem sido uma das áreas mais desenvolvidas, sendo corrente
proceder-se a análises dinâmicas para avaliar o desempenho sísmico de estruturas com um nível
de detalhe que não era possível há poucos anos.
Têm sido propostos diferentes métodos numéricos para modelar o comportamento dinâmico das
estruturas, sendo que dependente da formulação, a análise realiza-se tanto no domínio do tempo
como no domínio da frequência.
A dificuldade que se coloca após obter uma solução numérica, é definir a forma como se devem
combinar os diferentes resultados obtidos para determinar os esforços de dimensionamento da
estrutura, tratando-se da principal preocupação de um engenheiro projectista.
Para esse efeito diversas técnicas têm sido propostas, sendo correntemente os métodos de
sobreposição modal com recurso a espectro de resposta, como são os casos da Combinação
Quadrática Completa (CQC) e da Raiz Quadrada da Soma dos Quadrados (RQSQ), a forma mais
utilizada entre os engenheiros para análises sísmicas. Contudo esses métodos não dão
informação sobre a interacção entre esforços actuantes, o que condiciona o dimensionamento
estrutural.
1.2 Objectivo
O objectivo deste estudo consiste em realizar a análise sísmica de uma estrutura porticada
tridimensional, no domínio da frequência, tendo por base o Método dos Elementos Finitos (MEF),
generalizando a abordagem proposta em (Ferreira, 2009) para uma estrutura bidimensional.
Pretende-se definir uma combinação dos resultados obtidos a partir de um espectro de densidade
de potências, que disponibilize a interacção entre o esforço normal e os momentos flectores
segundo as direcções principais de inércia de uma secção e que contabilize as possíveis
2
direcções que possam assumir no espaço de interacção, sendo essa a principal contribuição do
estudo efectuado e uma das limitações dos métodos de sobreposição modal.
1.3 Organização
No sentido de realizar um estudo faseado e bem fundamento na procura dos objectivos propostos,
a exposição do trabalho desenvolvido encontra-se divido em seis Capítulos:
Capítulo 2- Generalidades; definição de acção dinâmica das diferentes solicitações que ocorrem
em estruturas; estudo de solicitações em regime livre e forçado; estudo de osciladores lineares
tanto de um como de vários graus de liberdade; análise modal; simulações sísmicas; combinações
correntes com recurso a espectro de resposta como CQC e RQSQ.
Capítulo 3- Métodos Numéricos; introdução ao MEF, os seus princípios básicos e a metodologia
realizada para a construção das equações que definem o comportamento dinâmico de uma
estrutura; introdução ao MN, os seus princípios básicos e posterior introdução da acção sísmica
no seu conteúdo para obtenção de esforços devido à mesma.
Capítulo 4- Modelo Numérico – Implementação para o Caso Tridimensional; fundamentação
dos princípios básicos inerentes ao processo de cálculo, definição da acção dinâmica, princípios
essenciais à combinação de esforços pretendida; metodologia aplicada ao cálculo da superfície de
interacção .
Capítulo 5- Casos de Estudo; Definição dos vários modelos de estudo e Obtenção de
Resultados inerentes à análise direccional de esforços e determinação das curvas de interacção
e ainda obtenção de resultados pela simulação recorrendo ao MN assim como os
obtidos do método de sobreposição modal CQC recorrendo ao SAP2000.
Capítulo 6- Síntese e Análise dos Resultados obtidos pelos vários métodos; Análise das
várias superfícies de interacção obtidas e comparação dos resultados obtidos através dos
diferentes métodos.
Capítulo 7- Conclusões; conclusões retiradas do estudo; desenvolvimentos futuros que possam
dar contributo ao estudo realizado.
3
Capítulo 2 - Generalidades
2.1 Dinâmica de Estruturas
A análise dinâmica de uma estrutura organiza-se pelas seguintes fases:
Quantificação das solicitações dinâmicas aplicadas na estrutura
Definição do modelo estrutural
Definição de um modelo de cálculo que represente o comportamento da estrutura,
nomeadamente no que se refere à deformabilidade e absorção de energia
Estudo dinâmico do comportamento do modelo de cálculo.
A análise dinâmica trata da determinação de deslocamentos, velocidades e acelerações nos
vários elementos da estrutura, pois tendo definida a deformada dinâmica da estrutura, o cálculo
prossegue recorrendo à teoria de estruturas.
2.1.1 Equilíbrio Estático e Equilíbrio Dinâmico
Através do seguinte exemplo, que concretiza o que foi referido, faz-se evidência às diferenças
entre equilíbrio estático e equilíbrio dinâmico.
Figura 2.1 – Modelo Estrutural
A Figura 2.1 representa o modelo estrutural da estrutura de suporte de uma máquina que lhe
transmite forças horizontais orientadas segundo x em que a massa das vigas e pilares é
desprezável face à massa m, que engloba a massa da máquina em conjunto com a massa da laje.
4
Tendo quantificado a acção dinâmica e definido o modelo estrutural, procede-se à definição do
modelo matemático. Aqui é necessário considerar a condição de equilíbrio de uma estrutura sob a
acção de solicitações em regime estático e dinâmico, que preconiza que a resultante das
solicitações actuantes deve ser nula em cada um dos elementos da estrutura.
No caso de todas as solicitações serem Forças, em cada elemento da estrutura, deverá verificar-
se equilíbrio entre todas as forças actuantes, que de acordo com (Ravara, 1969) poderão ser dos
seguintes tipos:
– Forças de Inércia
- Forças dissipativas de atrito ou amortecimento
- Forças de restituição ou ligação
- Forças exteriores aplicadas
Ou seja, deverá verificar-se, para cada elemento a condição
(2.1)
No entanto em regime estático as solicitações actuam muito lentamente até ao seu valor final de
modo que se despreza a velocidade e a aceleração, reduzindo (2.1) a
(2.2)
que exprime a condição de equilíbrio estático.
No caso em que as solicitações na estrutura variem ao longo do tempo e que os seus elementos
adquirem velocidades e acelerações de valor considerável, o comportamento da estrutura rege-se
por equações do tipo de (2.1) que exprimem as condições de equilíbrio dinâmico.
O principal objectivo da análise dinâmica das estruturas é estabelecer e resolver equações do tipo
de (2.1) que constituem o modelo matemático da estrutura.
2.1.2 Solicitações em Regime Dinâmico
O carácter estático ou dinâmico de uma solicitação é relativo à estrutura sobre a qual esta actua.
Assim uma dada solicitação apresenta carácter dinâmico relativamente a uma estrutura quando as
5
Forças de Inércia que se desenvolvem apresentam valores significativos em relação às restantes
forças que intervêm no equilíbrio da estrutura.
As solicitações dinâmicas são classificadas em determinísticas ou aleatórias, conforme é
conhecido o seu valor num dado instante ou apenas a respectiva distribuição estatística. Por sua
vez as solicitações determinísticas dividem-se em periódicas ou aperiódicas, conforme os seus
valores se repetem ou não ao fim de um intervalo de tempo fixo, , designado por Período. A
condição de periodicidade é expressa por:
para inteiro (2.3)
2.1.3 Osciladores Lineares de Um grau de Liberdade
De acordo com (Azevedo & Proença, 1991) um oscilador com um grau de liberdade é um sistema
que pode ser reduzido a uma massa concentrada num único ponto e essa massa pode apresentar
apenas uma componente do deslocamento.
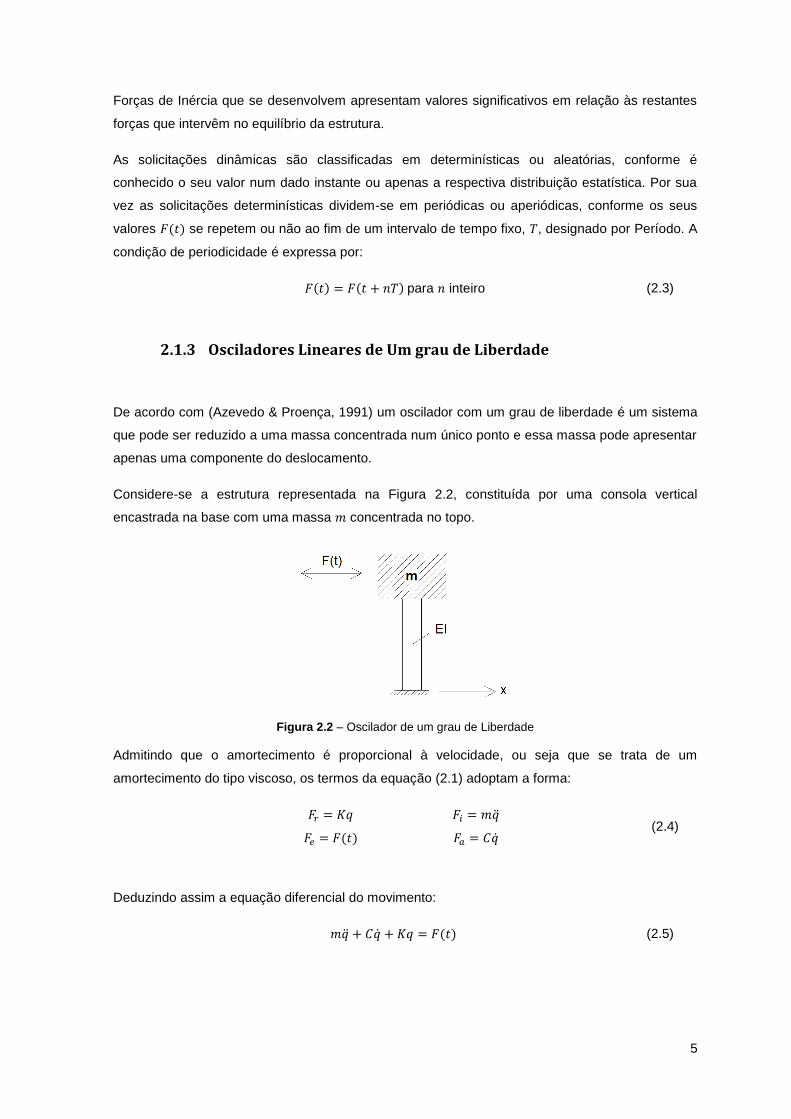
Considere-se a estrutura representada na Figura 2.2, constituída por uma consola vertical
encastrada na base com uma massa concentrada no topo.
Figura 2.2 – Oscilador de um grau de Liberdade
Admitindo que o amortecimento é proporcional à velocidade, ou seja que se trata de um
amortecimento do tipo viscoso, os termos da equação (2.1) adoptam a forma:
(2.4)
Deduzindo assim a equação diferencial do movimento:
(2.5)
6
Onde representa o coeficiente de proporcionalidade entre a força de amortecimento e a
velocidade, ou seja, a força correspondente à velocidade unitária, designada por Amortecimento, e
a relação entre a força de restituição e o deslocamento, designada por Rigidez.
2.1.3.1 Oscilação em Regime Livre
Ao analisar a resposta dum oscilador de um grau de liberdade, na ausência de solicitação exterior,
tem-se a equação diferencial do movimento definida da seguinte forma:
(2.6)
A qual, dividindo ambos os membros por , apresenta-se:
(2.7)
Em que se trata da frequência própria angular não amortecida. Esta traduz a frequência da
resposta na ausência de amortecimento, definida pela expressão:
(2.8)
E é designado pelo coeficiente de amortecimento. Representa a percentagem de amortecimento
em relação ao amortecimento crítico de tal modo que
(2.9)
A solução da equação (2.7) depende do valor , dependendo, como consequência, de três casos
de análise segundo (Azevedo & Proença, 1991):
Amortecimento sobre-crítico,
Amortecimento sob-crítico,
Amortecimento crítico,
No caso de Amortecimento sobre-crítico ( ), a equação que define a resposta da estrutura é
dada da forma:
(2.10)

7
Em que as variáveis A e B traduzem as condições iniciais do movimento e relaciona-se com a
frequência própria da estrutura, , pela expressão:
(2.11)
Nestas condições a resposta da estrutura é aperiódica e sem movimento vibratório (Figura 2.3a).
Para o caso de Amortecimento sob-crítico ( ) obtém-se a resposta através da expressão:
(2.12)
Ou simplificadamente:
(2.13)
Em que , tratando-se da frequência amortecida, é obtida pela expressão:
(2.14)
As variáveis A e B ou e traduzem as condições iniciais, que no caso mais corrente destas
corresponderem ao deslocamento e à velocidade inicial no instante , verifica-se:
(2.15)
(2.16)
Ou, pela abordagem (2.13):
(2.17)
(2.18)
8
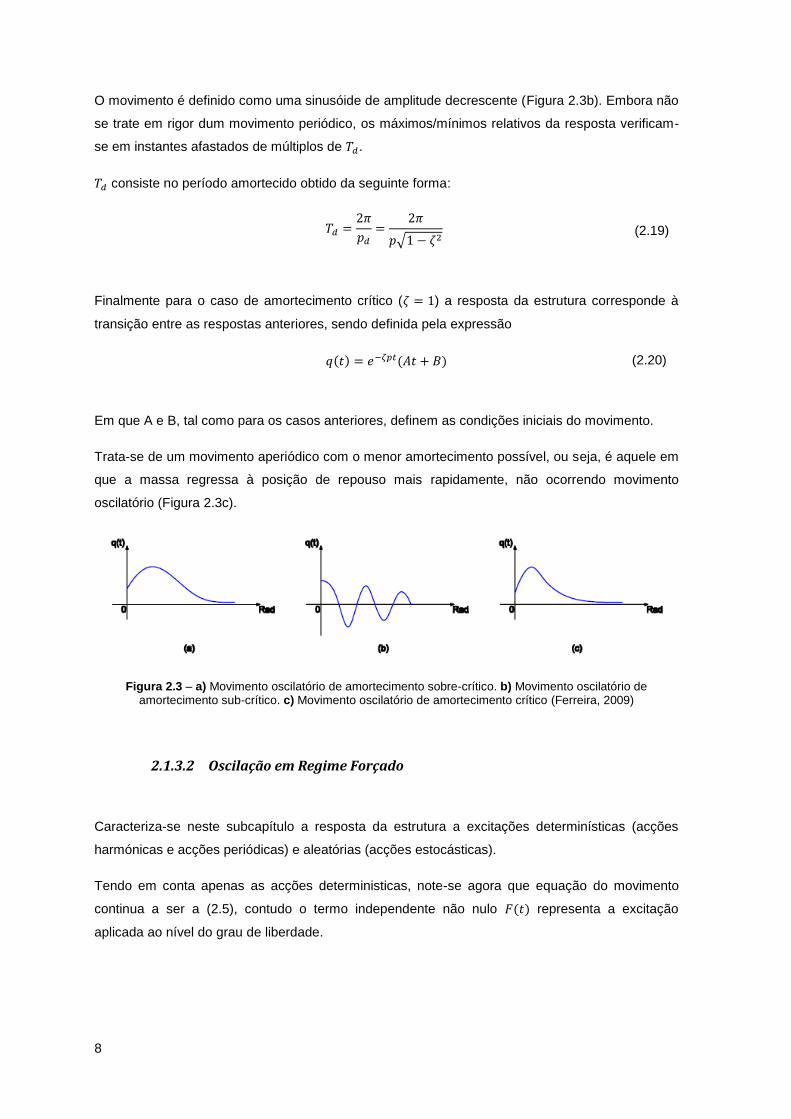
O movimento é definido como uma sinusóide de amplitude decrescente (Figura 2.3b). Embora não
se trate em rigor dum movimento periódico, os máximos/mínimos relativos da resposta verificam-
se em instantes afastados de múltiplos de .
consiste no período amortecido obtido da seguinte forma:
(2.19)
Finalmente para o caso de amortecimento crítico ( ) a resposta da estrutura corresponde à
transição entre as respostas anteriores, sendo definida pela expressão
(2.20)
Em que A e B, tal como para os casos anteriores, definem as condições iniciais do movimento.
Trata-se de um movimento aperiódico com o menor amortecimento possível, ou seja, é aquele em
que a massa regressa à posição de repouso mais rapidamente, não ocorrendo movimento
oscilatório (Figura 2.3c).
Figura 2.3 – a) Movimento oscilatório de amortecimento sobre-crítico. b) Movimento oscilatório de amortecimento sub-crítico. c) Movimento oscilatório de amortecimento crítico (Ferreira, 2009)
2.1.3.2 Oscilação em Regime Forçado
Caracteriza-se neste subcapítulo a resposta da estrutura a excitações determinísticas (acções
harmónicas e acções periódicas) e aleatórias (acções estocásticas).
Tendo em conta apenas as acções deterministicas, note-se agora que equação do movimento
continua a ser a (2.5), contudo o termo independente não nulo representa a excitação
aplicada ao nível do grau de liberdade.
9
2.1.3.2.1 Acções Harmónicas
Considera-se que a estrutura é actuada por uma acção harmónica aplicada da forma
(2.21)
Adoptando a equação do movimento a seguinte forma:
(2.22)
E dividindo a totalidade dos termos por , obtém-se a expressão
(2.23)
A solução desta equação diferencial é composta pela sobreposição da solução geral da equação
homogénea (2.6) e da solução particular da equação não homogénea (2.23) que para o presente
caso, se apresenta
(2.24)
Ou em alternativa
(2.25)
Ao substituir a equação (2.25) na (2.23) e identificando os termos em e , obtém-se
os valores de C e D.
(2.26)
(2.27)
Sendo
(2.28)

10
Considerando a solução particular no formato da (2.25) tem-se
(2.29)
Onde se designa por factor de amplificação dinâmica, dado por
(2.30)
Finalmente o parâmetro representa o desfasamento entre a acção e a resposta, dado por
(2.31)
2.1.3.2.2 Acções Periódicas
Tendo obtida a solução para a resposta a acções harmónicas, pode-se facilmente deduzir a
resposta de um oscilador a acções periódicas.
Qualquer acção periódica com período e com um mínimo de regularidade, pode ser
desenvolvida em Série de Fourier, ou seja, pode ser substituída pela soma de componentes
harmónicas de períodos submúltiplos do período de referência como dita a seguinte expressão:
(2.32)
Onde os termos e são designados por coeficientes de Fourier e se calculam da seguinte
forma:
(com (2.33)
(com (2.34)
Da expressão (2.32) verifica-se que o termo
representa a parcela estática e é responsável pelo
valor médio não nulo da excitação.
11
A resposta do sistema pode ser obtida a partir da sobreposição das respostas a cada uma das
componentes harmónicas de excitação.
Tendo isto, a resposta em regime permanente é dada por
(2.35)
Em que
E e correspondem a e respectivamente para
.
2.1.3.2.3 Excitações Estocásticas
Considere-se a estrutura sujeita a uma excitação aleatória que é caracterizada por um processo
estocástico Gaussiano Ergódico. Neste caso, de acordo com (Azevedo & Proença, 1999) a
excitação pode ser caracterizada pelas seguintes entidades:
- auto matriz função de autocorrelação da excitação
- auto matriz função densidade espectral de potência da excitação
Que se definem e relacionam através das seguintes propriedades
(2.36)
(2.37)
(2.38)
Verifique-se que para representa o valor quadrático médio da solicitação. Por outro
lado quando assume um valor não nulo, fornece uma medida da ligação entre os valores
da solicitação em instantes múltiplos de .
Por sua vez , trata-se da Transformada de Fourier da função de autocorrelação
,em que os seus valores quantificam a contribuição das componentes elementares de
frequência para o valor quadrático médio da solicitação.
Note-se ainda que define o valor esperado da correlação entre as várias
realizações e do processo estocástico, desfasados de um intervalo .
12
No caso de assumir um valor constante, designa-se esse processo por “ruído branco”. Na
verdade, esse processo é meramente teórico, já que o seu valor quadrático médio é infinito. Assim
sendo, para que tal seja fisicamente possível, é necessário definir um intervalo de frequências.
Na sequência do raciocínio, segundo os mesmos autores, definem-se as matrizes de informação
cruzada (excitação - resposta ou o recíproco)
(2.39)
(2.40)
(2.41)
Por fim a resposta da estrutura constitui também ela um processo estocástico ergódico
estacionário caracterizado pelas seguintes auto matrizes função de autocorrelação da resposta.
(2.42)
(2.43)
Por último, é ainda possível demonstrar que estas identidades se relacionam reciprocamente
através matriz função de transferência.
(2.44)
(2.45)
(2.46)
Tratando-se o transposto do conjugado da função de transferência.
Note-se que o integral de tais funções de densidade espectral de resposta dada por (2.44) define o
valor quadrático médio da resposta da estrutura.
No entanto numa análise dinâmica é importante conhecerem-se os valores máximos, já que a
maior parte das vezes, são os valores máximos que condicionam a segurança estrutural.
Para tal, segundo (Azevedo J, 1996) efectua-se uma análise da probabilidade de distribuição de
máximos recorrendo a uma função de densidade espectral de Banda Estreita. Posteriormente
como em qualquer processo é importante determinar com que frequências ocorrem os valores
máximos. Tendo isto e analisando a sequência de passos explanada em (Ferreira, 2009) obtém-se
o valor esperado do máximo que, se pode obter recorrendo à expressão:
13
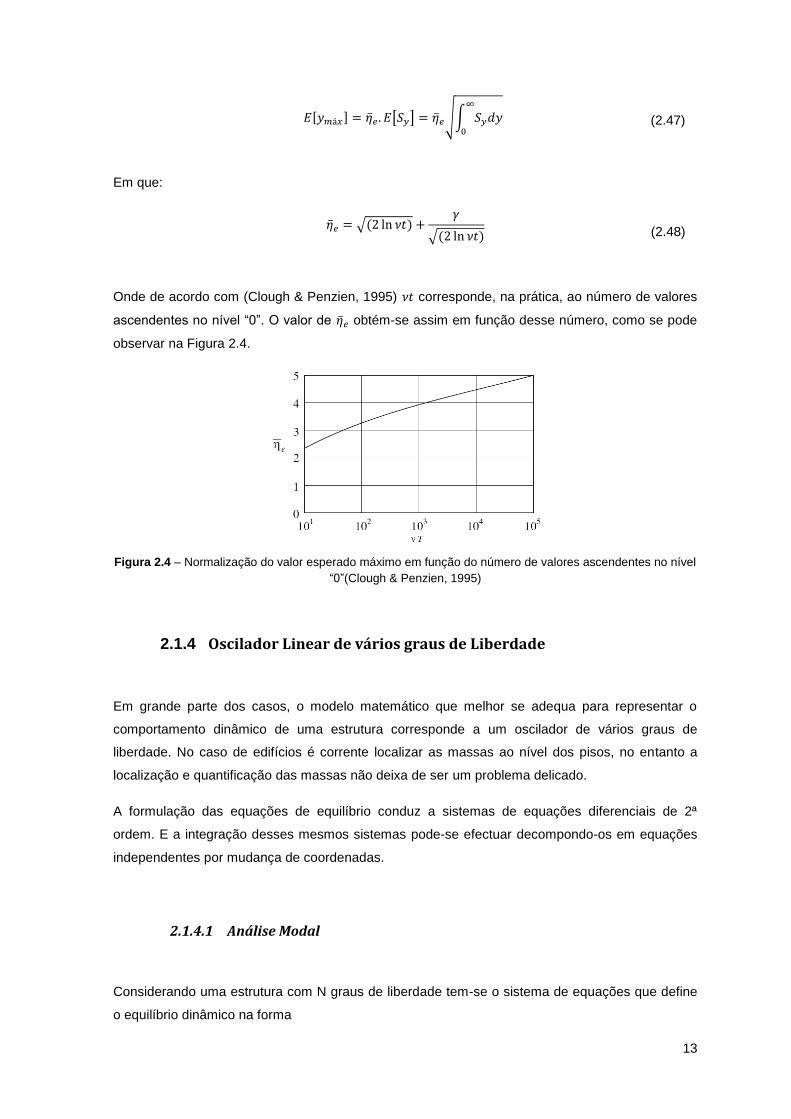
(2.47)
Em que:
(2.48)
Onde de acordo com (Clough & Penzien, 1995) corresponde, na prática, ao número de valores
ascendentes no nível “0”. O valor de obtém-se assim em função desse número, como se pode
observar na Figura 2.4.
Figura 2.4 – Normalização do valor esperado máximo em função do número de valores ascendentes no nível
“0”(Clough & Penzien, 1995)
2.1.4 Oscilador Linear de vários graus de Liberdade
Em grande parte dos casos, o modelo matemático que melhor se adequa para representar o
comportamento dinâmico de uma estrutura corresponde a um oscilador de vários graus de
liberdade. No caso de edifícios é corrente localizar as massas ao nível dos pisos, no entanto a
localização e quantificação das massas não deixa de ser um problema delicado.
A formulação das equações de equilíbrio conduz a sistemas de equações diferenciais de 2ª
ordem. E a integração desses mesmos sistemas pode-se efectuar decompondo-os em equações
independentes por mudança de coordenadas.
2.1.4.1 Análise Modal
Considerando uma estrutura com N graus de liberdade tem-se o sistema de equações que define
o equilíbrio dinâmico na forma
14
(2.49)
Ou, em linguagem matricial
(2.50)
Em que , e se verificam as matrizes de Massa, Amortecimento e Rigidez da Estrutura
respectivamente de ordem N.
Seguindo (Guerreiro, 1999), procede-se a uma pequena explicação do que trata a análise modal
de uma estrutura.
2.1.4.1.1 Frequências Próprias e Modos de Vibração
A determinação das frequências próprias de um determinado sistema é efectuada com base na
análise do movimento em regime livre e sem amortecimento.
De tal modo observa-se assim a equação de equilíbrio dinâmico mais simplificada
(2.51)
Admitindo um movimento da estrutura do tipo harmónico quando vibra com uma dada frequência
, apresenta-se:
(2.52)
Onde representa a condição deformada da estrutura.
Derivando duas vezes a expressão em ordem ao tempo, obtém-se a expressão das acelerações
ao longo do tempo:
(2.53)
Posteriormente ao substituir as equações (2.52) e (2.53) na equação (2.51) e trabalhando esta
última, obtém-se:
(2.54)
15
Para que o sistema de equações (2.54) tenha uma solução não trivial, é necessário igualar o
determinante da matriz a zero.
Logo a determinação de frequências e modos de vibração resulta num problema de determinação
de valores e vectores próprios, em que os valores próprios representam as frequências e os
vectores próprios os modos de vibração. Assim, a cada frequência corresponde um modo de
vibração .
Recorde-se que a determinação das frequências próprias da estrutura e os seus respectivos
modos de vibração foram calculados considerando Amortecimento nulo, no entanto em todas as
estruturas ocorre amortecimento.
Segundo (Ravara, 1969) Caughey demonstrou que os modos de vibração só subsistem se for
diagonalizada pela mesma transformação que diagonaliza e .
Uma solução possível consiste na aplicação do Amortecimento de Rayleigh que assume que a
matriz de amortecimento se trata de uma combinação linear das matrizes de massa e de rigidez,
em que os parâmetros e se apresentam como constantes.
(2.55)
2.1.4.1.2 Condições de Ortogonalidade
Os vectores que definem os modos de vibração apresentam propriedades que são designadas por
condições de ortogonalidade traduzidas pelas equações:
(2.56)
(2.57)
Que representam a ortogonalidade dos modos de vibração de uma estrutura em relação, à matriz
de massa e de rigidez respectivamente.
Com o intuito de demonstrar a ortogonalidade em relação à matriz de massa considere-se a
equação (2.54) para os modos de vibração e :
(2.58)
(2.59)
Multiplicando a equação (2.58) por obtém-se:
16
(2.60)
Ao transpor a equação (2.59) e tendo em conta que as matrizes e são simétricas, obtém-
se a expressão:
(2.61)
Multiplicando ambas as parcelas por
(2.62)
Ao subtrair (2.62) à (2.60) tem-se:
(2.63)
Perante este resultado, está demonstrado o que se entende por ortogonalidade dos modos de
vibração em relação à matriz de Massa uma vez que e são diferentes. E o mesmo se pode
demonstrar para a matriz de Rigidez.
Tirando então partido das condições de ortogonalidade, podem-se estabelecer as seguintes
relações
(2.64)
(2.65)
Em que é a matriz modal, onde cada coluna representa um modo de vibração e e
são matrizes diagonais, como consequência das condições de ortogonalidade.
Note-se que, se os modos de vibração são ortogonais às matrizes de massa e rigidez, também o
serão em relação a qualquer matriz que resulte da combinação linear das duas como é o caso da
matriz de Amortecimento como se viu atrás, logo também se pode estabelecer a seguinte relação
(2.66)
2.1.4.1.3 Normalização dos modos de vibração
Os modos de vibração como já foi referido anteriormente, representam apenas a configuração da
estrutura, quando esta vibra com determinada frequência. Sendo assim, o valor absoluto das
componentes do vector modo de vibração não apresenta qualquer interesse, e sim a relação entre
17
eles. Deste modo, procede-se à normalização do vector modo de vibração com o intuito de facilitar
a sua interpretação.
A forma de normalização dos modos de vibração mais usada, devido às simplificações na
representação da equação de movimento é a normalização em relação à matriz de massa, que
consiste em considerar os modos de vibração de modo a obter a relação:
(2.67)
E recordando que cada termo da matriz diagonal é obtido através da relação
(2.68)
Conclui-se que para obter a normalização pretendida, basta aplicar a seguinte relação ao vector
de configuração modal.
(2.69)
E de forma consequente verifica-se:
(2.70)
Em que corresponde à matriz modal que contém os modos normalizados, e a matriz
identidade.
Tendo em conta esta normalização, centrando-nos na equação (2.58), multiplicando ambos os
termos pela transposta do modo de vibração na sua forma normalizada, obtém-se a relação:
(2.71)
Considerando a condição apresentada em (2.67), e relembrando a designação indicada na (2.65),
demonstra-se:
(2.72)
Isto denota que cada elemento da matriz diagonal , representa o quadrado da frequência de
vibração do modo de vibração correspondente, desde que os modos estejam normalizados à
matriz de massa.
18
Seguindo o mesmo raciocínio, também se obtém a matriz diagonal de amortecimento normalizada
(2.73)
Em que cada elemento da matriz diagonal representa o amortecimento do correspondente
modo de vibração.
2.1.4.1.4 Definição de Coordenadas Modais
O sistema de equações de equilíbrio dinâmico traduzido pela expressão (2.5) é constituído por
equações diferenciais dependentes entre si uma vez que e não são obrigatoriamente
matrizes diagonais. No entanto, de modo a facilitar a resolução do problema, pretende-se
representar o sistema de equações diferenciais num novo referencial, de forma que estas sejam
independentes entre si, tratando-se do referencial de coordenadas modais.
Multiplicando os termos da equação (2.5) pela transposta da matriz global tem-se
(2.74)
Introduzindo o produto
(2.75)
Sendo , o elemento neutro da multiplicação obtém-se
(2.76)
Optando por normalizar à matriz de massa pois o sistema de equações fica mais simples e é mais
fácil de interpretar o significado físico dos vários elementos envolvidos, ao contabilizar então as
propriedades de ortogonalização dos modos de vibração em relação a , definidas nas
equações (2.70), (2.72) e (2.73), tem-se
(2.77)
Ao interpretar-se o produto da matriz pelo vector como uma transformação de
coordenadas, obtém-se o novo referencial designado por referencial das coordenadas modais ou
generalizadas .
19
O sistema de equações de equilíbrio dinâmico, no referencial apresenta-se através da
expressão seguinte:
(2.78)
Definindo-se as transformações de coordenadas:
(transformação para coordenadas modais)
(2.79)
(transformação para coordenadas da estrutura) (2.80)
Obtém-se assim um sistema de equações diferenciais independentes pois todas as matrizes
presentes são matrizes diagonais, onde cada modo de vibração pode ser representado da
seguinte forma:
para o modo (2.81)
A resolução deste sistema de equações permite obter a solução do problema dinâmico expressa
em termos de coordenadas modais.
Note-se que é clara a semelhança entre as equações (2.81) e a equação de equilíbrio dinâmico de
um sistema de um grau de liberdade e é tirando partido dessa semelhança que se obtém a
solução para um sistema de múltiplos graus de liberdade a partir da solução para sistemas de um
grau de liberdade
Note-se ainda que se for utilizada qualquer outra normalização modal, sem ser a normalização à
matriz de massa, o sistema de equações de equilíbrio dinâmico apresenta-se da seguinte forma:
(2.82)
Em que
(transformação para coordenadas modais)
(2.83)
(transformação para as coordenadas da estrutura) (2.84)
20
2.1.5 Resposta de Osciladores de Vários Graus de Liberdade
2.1.5.1 Oscilação em Regime Livre
O sistema de equações do movimento em regime livre de um sistema com vários graus de
liberdade referida ao sistema de coordenadas globais assume o seguinte aspecto
para o modo (2.85)
Por outro lado, de acordo com (Guerreiro, 1999) a resposta de um sistema de um grau de
liberdade, em regime livre e com amortecimento sub-critico é traduzida por:
(2.86)
Em que e correspondem ao deslocamento inicial e à velocidade inicial respectivamente.
Por analogia, a resposta dum sistema com vários graus de liberdade, para cada uma das
coordenadas modais será a seguinte
(2.87)
É necessário ter em conta que se tem que efectuar a transformação das coordenadas para que se
obtenha as condições iniciais referidas ao sistema de coordenadas modais (2.83), uma vez
conhecidas as condições iniciais do movimento relativamente aos graus de liberdade da estrutura.
(2.88)
Após o cálculo da resposta nas coordenadas modais, efectua-se a transformação de coordenadas
para obter a resposta expressa em coordenadas da estrutura.

21
2.1.5.2 Oscilação em Regime Forçado
2.1.5.2.1 Resposta a uma Excitação Harmónica
Na análise da resposta dinâmica de um oscilador de vários graus de liberdade em regime forçado,
pode-se considerar o sistema de equações (2.81).
Num sistema de graus de liberdade, considerando a hipótese de existirem forças harmónicas
aplicadas em todos os graus de liberdade da estrutura.
Assim, segundo (Guerreiro, 1999), a equação (2.81) pode tomar a seguinte forma
(2.89)
Em que é referente ao modo e ao grau de liberdade.
Tendo isto, a resposta no modo de vibração de um sistema de graus de liberdade é traduzida
pela equação
(2.90)
Em que
(2.91)
(2.92)
(2.93)
Também aqui, após o cálculo da resposta nas coordenadas modais é necessário fazer a
transformação de coordenadas para obter a resposta em coordenadas da estrutura.
22
2.1.5.2.2 Resposta a uma Excitação Periódica
No caso da ocorrência de uma solicitação periódica numa estrutura de vários graus de liberdade, a
sua resposta pode ser obtida por sobreposição modal, em que o raciocínio é em tudo idêntico à
resposta a uma excitação periódica por um sistema de 1 grau de liberdade
(2.94)
É apenas necessária transformação de coordenadas para o sistema de coordenadas da estrutura.
2.2 Acção Sísmica
2.2.1 Resposta a um conjunto de Acelerações da Base
Para uma estrutura solicitada por um conjunto de acelerações na base, como é o caso da acção
sísmica, segundo (Guerreiro, 1999), a formulação da equação de equilíbrio dinâmico de acordo
com é semelhante à utilizada para quando a solicitação é feita por um conjunto de forças de
excitação com a diferença que as equações devem ser escritas em coordenadas relativas , ou
seja, no sistema de coordenadas que permita obter o movimento da estrutura em relação ao
movimento do solo .
(2.95)
Perante isto, como apenas as forças de inércia dependem das coordenadas absolutas, o sistema
de equações de equilíbrio dinâmico assume a seguinte forma, escrito em coordenadas relativas
(2.96)
Pelo facto da probabilidade dos apoios da estrutura terem deslocamentos independentes uns dos
outros ser muito reduzida em estruturas de dimensões correntes, admite-se a hipótese de haver
apenas um deslocamento independente em cada direcção ( , e ).
Estes deslocamentos do solo, para serem introduzidos na equação, devem apenas ser
considerados na posição do vector correspondentes às respectivas direcções. Para tal cria-se um
vector com valor unitário nas posições correspondentes à direcção desejada e zero nas restantes.
23
– Vector com valores unitários nas posições correspondentes à direcção e zero nas
restantes
– Vector com valores unitários nas posições correspondentes à direcção e zero nas
restantes
– Vector com valores unitários nas posições correspondentes à direcção e zero nas
restantes
Sendo assim, considerando movimentos no solo em todas as direcções tem-se:
(2.97)
Considerando somente movimentos do solo na direcção e escrevendo a equação nas
coordenadas modais, admitindo uma normalização dos modos de vibração em relação a
verifica-se
(2.98)
Podendo ser representada, para cada modo de vibração, pela seguinte equação
para o modo (2.99)
Nesta expressão, o factor que multiplica a aceleração do solo designa-se do Factor de
Participação Modal segundo , para a direcção em que actua essa aceleração.
(2.100)
Analisando a equação (2.99) verifica-se que a resolução do problema dinâmico de imposição de
acelerações na base pode ser resolvido de forma semelhante ao problema de imposição de forças
dinâmicas nos graus de liberdade da estrutura. É apenas necessário efectuar a seguinte
substituição
(2.101)
Neste caso apenas está a ser contabilizada a aceleração do solo na direcção mas a expressão
anterior é válida para qualquer direcção.
24
2.2.2 Análise Sísmica por Espectros de Resposta
Na maioria dos casos em que se pretende fazer a análise sísmica de estruturas com
comportamento linear, o objectivo deixa de ser conhecer a evolução da resposta ao longo do
tempo, mas apenas calcular os valores extremos desta resposta. Nestes casos é mais prático
recorrer a uma análise sísmica por espectros de resposta.
Espectros de resposta, citando (Guerreiro, 1999) são definidos como uma representação do valor
máximo da resposta (medida em termos de deslocamento, aceleração, esforços, etc.) de um
conjunto de osciladores de um grau de liberdade, quando solicitados por uma determinada acção
sísmica. Estes valores máximos são representados em função da Frequência própria dos
osciladores (ou do seu período) e do valor do coeficiente de Amortecimento considerado.
Recordando que a equação de equilíbrio dinâmico para um oscilador de um grau de liberdade,
quando solicitado por uma aceleração na base, é dada por:
(2.102)
Conhecendo-se o espectro de resposta de acelerações compatível com a serie de acelerações
impostas na base ( ), obtem-se o valor máximo da resposta directamente a partir do espectro,
que será a ordenada do espectro que corresponde à frequência própria do oscilador e ao
amortecimento traduzido por .
(2.103)
Onde traduz o valor do espectro de resposta de acelerações, para a frequência e
coeficiente de amortecimento .
Ao se compararem as equações (2.102) e (2.99) verifica-se que a única diferença corresponde ao
Factor de participação modal que corresponde simplesmente a um factor de escala. Logo:
para o modo (2.104)
Uma vez que se está a trabalhar em regime linear, também a solução será determinada para um
oscilador de um grau de liberdade, afectada do mesmo factor de escala, ou seja:
(2.105)
Aqui corresponde ao valor espectral da aceleração para a direcção e o valor de
corresponde ao valor máximo da aceleração na coordenada generalizada
25
correspondente ao modo de vibração . Verifica-se assim que é possível calcular os valores
máximos da aceleração correspondentes a todos os modos.
O cálculo pode ser igualmente efectuado tanto para deslocamentos como para velocidades, ao ter
acesso aos respectivos espectros de resposta.
(2.106)
(2.107)
Tratando-se do espectro de resposta de velocidades e , o espectro de resposta
de deslocamentos para a direcção , frequência e coeficiente de amortecimento .
Os valores das equações (2.105), (2.106) e (2.107) são obtidos em coordenadas modais o que
implica a necessidade de efectuar a transformação de coordenadas para as coordenadas da
estrutura.
(2.108)
(2.109)
(2.110)
Podendo os valores máximos da resposta da estrutura ser calculados a partir dos vectores de
deslocamento, velocidades ou acelerações obtidos através equações anteriores.
2.2.3 Métodos de Sobreposição Modal
Resta apenas definir como devem ser combinados os resultados obtidos para cada um dos
modos, onde aqui se segue novamente (Guerreiro, 1999).
Uma das regras de combinação modal usada usualmente é a “Raiz Quadrada da Soma dos
Quadrados” (RQSQ), em que como o nome indica, a resposta de uma determinada grandeza pode
ser estimado através da raiz quadrada da soma dos quadrados da resposta dessa grandeza em
cada modo.
(2.111)

26
A regra em causa apresenta resultados satisfatórios desde que as frequências próprias da
estrutura não se encontrem muito próximas entre si. Se tal acontecer, é mais adequado utilizar
outra regra de combinação modal designada por “Combinação Quadrática Completa” (CQC)
traduzida pela expressão:
(2.112)
Em que segundo (Azevedo & Proença, 1991) é dado por uma das expressões:
Para amortecimento modal não constante
(2.113)
Para amortecimento modal constante
(2.114)
Em que
(2.115)
O método CQC garante melhores resultados para modos com frequências próprias próximas
porque considera o efeito da correlação entre as respostas dos vários modos, enquanto o método
RQSQ assume as respostas independentes o que não é verdade para modos com frequências
próprias próximas.
No entanto o facto de o CQC considerar a correlação entre os modos não significa que apresente
valores resultantes da combinação superiores. Tal não acontece, por exemplo, no caso dos
deslocamentos modais dos modos apresentarem sinais contrários, em que torna o coeficiente de
correlação negativo.
No entanto, estes métodos apenas permitem obter a resposta máxima de uma determinada
variável, e em muitas situações, nomeadamente a situação em estudo, o que se pretende é avaliar
a resposta em termos de duas ou mais variáveis simultaneamente.

27
Uma vez tratar-se de obter a resposta mais desfavorável em termos de três variáveis em
simultâneo a componente direccional dos respectivos esforços assume uma
importância primordial, sendo que ambas as combinações citadas, apresentam-se limitadas no
que diz respeito a essa capacidade, e consequentemente as suas mais-valias podem ser postas
em causa.
2.3 Combinação de Esforços
Ao tratar-se de uma estrutura tridimensional, cada secção de uma barra é actuada de esforço
Normal, momentos flectores segundo ( , e segundo ( ), momento torsor e esforços
transversos segundo e segundo , estando os eixos locais apresentados na Figura 2.5.
Figura 2.5 – Eixos locais de uma barra
A Figura 2.6 apresenta todos esses esforços a actuar numa barra com a respectiva nomenclatura
definida para os mesmos.
Figura 2.6 - Esforços actuantes numa barra
28
No entanto no estudo desenvolvido apenas se estuda a interacção entre o esforço normal e
momentos flectores segundo e segundo 2 nas secções extremas da barra, (3,4,5) ou (9,10,11)
uma vez que são normalmente estes três esforços que condicionam o dimensionamento da
estrutura.
Os esforços numa dada secção são calculados com recurso ao MEF Quando a estrutura é
excitada por uma determinada frequência, , como se apresenta no Capítulo 3.
E o estudo da sua interacção é efectuado através duma análise direccional dos esforços, tratando-
se de uma alternativa aos métodos correntemente utilizados.
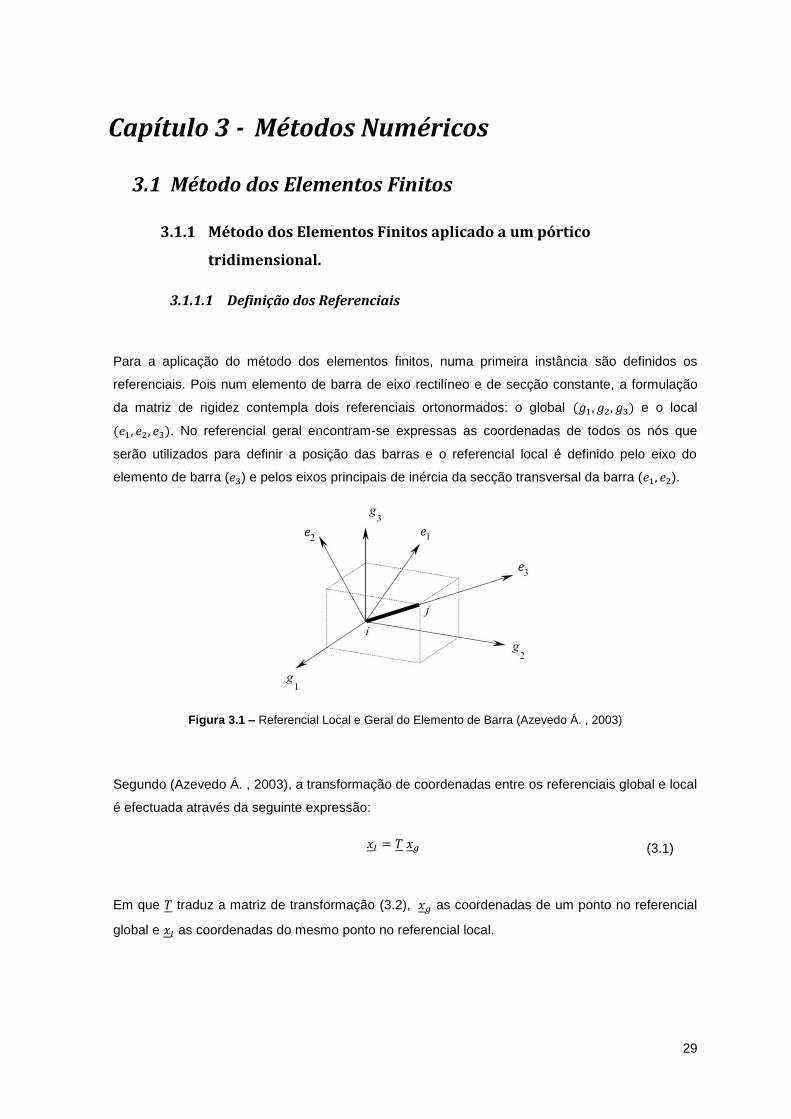
29
Capítulo 3 - Métodos Numéricos
3.1 Método dos Elementos Finitos
3.1.1 Método dos Elementos Finitos aplicado a um pórtico
tridimensional.
3.1.1.1 Definição dos Referenciais
Para a aplicação do método dos elementos finitos, numa primeira instância são definidos os
referenciais. Pois num elemento de barra de eixo rectilíneo e de secção constante, a formulação
da matriz de rigidez contempla dois referenciais ortonormados: o global e o local
. No referencial geral encontram-se expressas as coordenadas de todos os nós que
serão utilizados para definir a posição das barras e o referencial local é definido pelo eixo do
elemento de barra ( ) e pelos eixos principais de inércia da secção transversal da barra ( ).
Figura 3.1 – Referencial Local e Geral do Elemento de Barra (Azevedo Á. , 2003)
Segundo (Azevedo Á. , 2003), a transformação de coordenadas entre os referenciais global e local
é efectuada através da seguinte expressão:
(3.1)
Em que traduz a matriz de transformação (3.2), as coordenadas de um ponto no referencial
global e as coordenadas do mesmo ponto no referencial local.
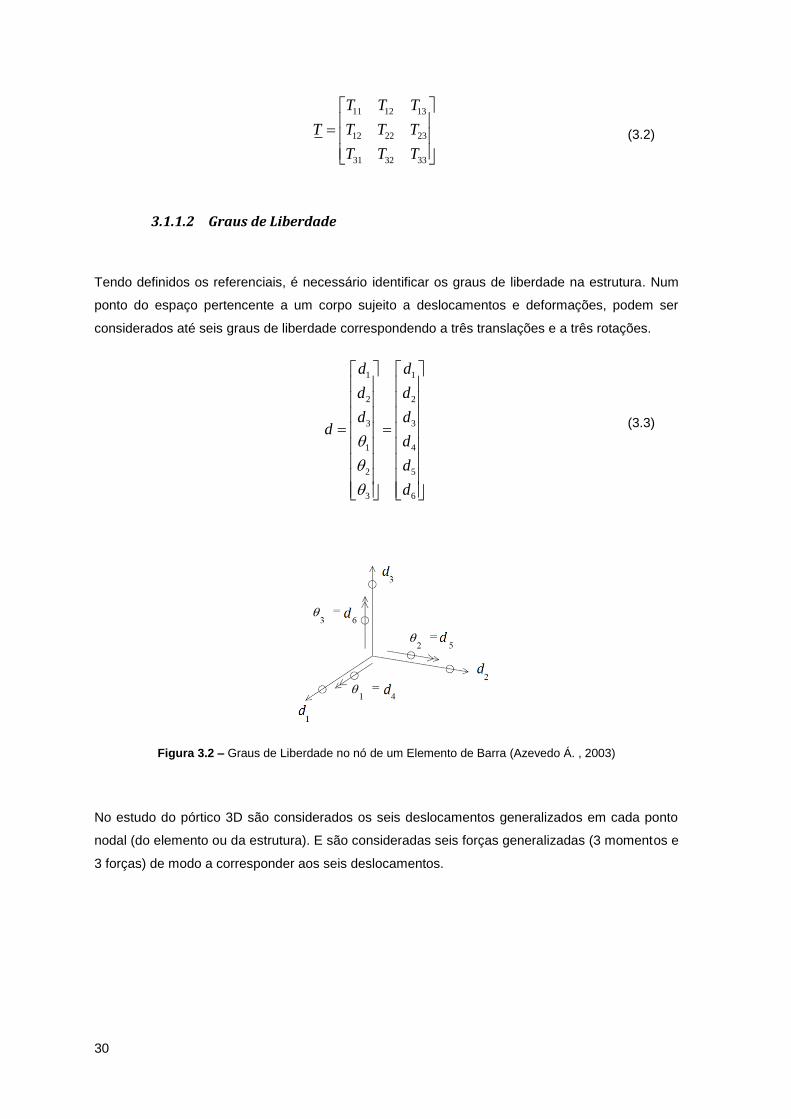
30
11 12 13
12 22 23
31 32 33
T T T
T T T T
T T T
(3.2)
3.1.1.2 Graus de Liberdade
Tendo definidos os referenciais, é necessário identificar os graus de liberdade na estrutura. Num
ponto do espaço pertencente a um corpo sujeito a deslocamentos e deformações, podem ser
considerados até seis graus de liberdade correspondendo a três translações e a três rotações.
1 1
2 2
3 3
1 4
2 5
3 6
d d
d d
d dd
d
d
d
(3.3)
Figura 3.2 – Graus de Liberdade no nó de um Elemento de Barra (Azevedo Á. , 2003)
No estudo do pórtico 3D são considerados os seis deslocamentos generalizados em cada ponto
nodal (do elemento ou da estrutura). E são consideradas seis forças generalizadas (3 momentos e
3 forças) de modo a corresponder aos seis deslocamentos.
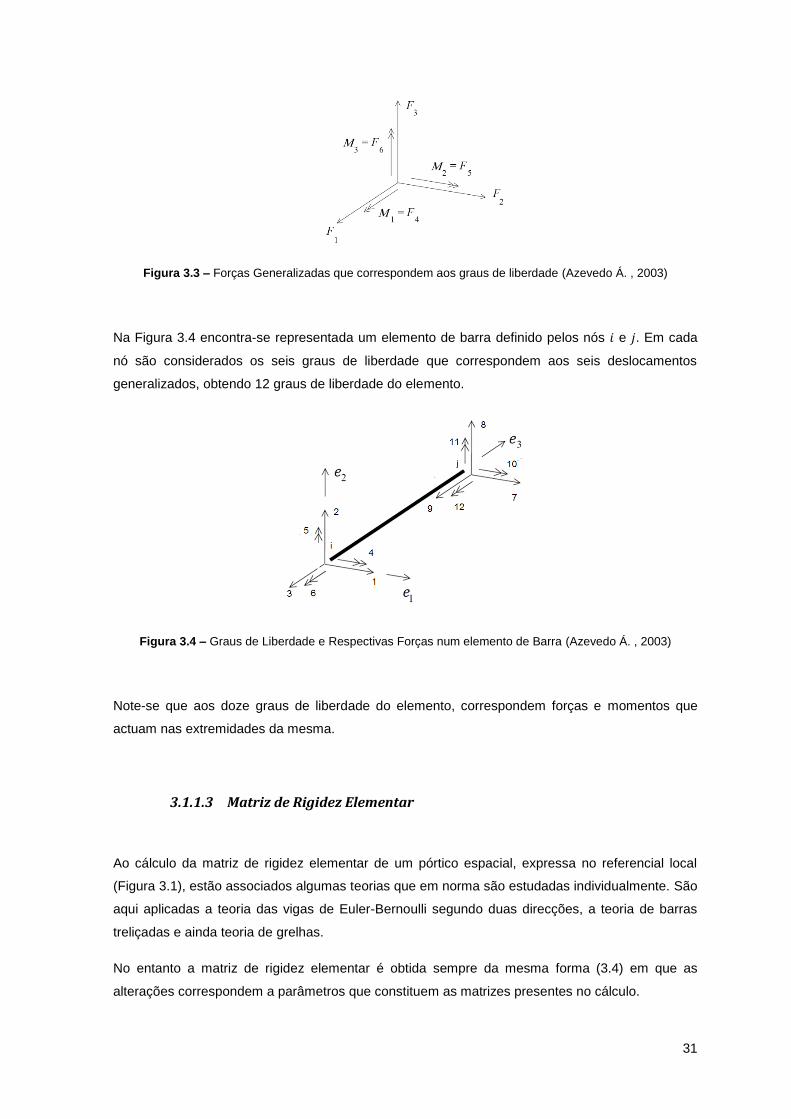
31
Figura 3.3 – Forças Generalizadas que correspondem aos graus de liberdade (Azevedo Á. , 2003)
Na Figura 3.4 encontra-se representada um elemento de barra definido pelos nós e . Em cada
nó são considerados os seis graus de liberdade que correspondem aos seis deslocamentos
generalizados, obtendo 12 graus de liberdade do elemento.
Figura 3.4 – Graus de Liberdade e Respectivas Forças num elemento de Barra (Azevedo Á. , 2003)
Note-se que aos doze graus de liberdade do elemento, correspondem forças e momentos que
actuam nas extremidades da mesma.
3.1.1.3 Matriz de Rigidez Elementar
Ao cálculo da matriz de rigidez elementar de um pórtico espacial, expressa no referencial local
(Figura 3.1), estão associados algumas teorias que em norma são estudadas individualmente. São
aqui aplicadas a teoria das vigas de Euler-Bernoulli segundo duas direcções, a teoria de barras
treliçadas e ainda teoria de grelhas.
No entanto a matriz de rigidez elementar é obtida sempre da mesma forma (3.4) em que as
alterações correspondem a parâmetros que constituem as matrizes presentes no cálculo.

32
(3.4)
Em que de acordo com (Castro, 2009) a matriz , de uma forma mais geral, pode dizer-se que
contém as propriedades mecânicas do elemento finito que permitem caracterizar o comportamento
elástico linear do material estrutural e relacionar os campos de esforços com os campos de
deformações.
Que para o caso tridimensional assume a seguinte forma
1
2
0 0 0
0 0 0
0 0 0
0 0 0 t
EI
EAD
EI
GI
(3.5)
Em que as variáveis aqui em questão são:
– Módulo de Young, constante em todos os pontos do elemento
– Área da secção transversal do elemento de barra, considerada constante
– Módulo de Distorção, também ele constante em todos os pontos
– Momento de Inércia da secção transversal do elemento de barra em relação ao eixo
– Momento de Inércia da secção transversal do elemento de barra em relação ao eixo
– Momento de Inércia de torção da secção transversal do elemento de barra
E é calculado através do produto do operador diferencial de compatibilidade , com a matriz das
funções de aproximação uma vez que
(3.6)
e
(3.7)
E sabendo que
(3.8)
Tem-se finalmente

33
(3.9)
Em que e para o pórtico 3D se encontram definidos respectivamente pelas seguintes
matrizes:
2
2
2
2
0 0 0
0 0 0
0 0 0
0 0 0
d
dx
d
dxA
d
dx
d
dx
(3.10)
2 4 8 10
3 9
1 5 7 11
6 12
0 ( ) 0 ( ) 0 0 0 ( ) 0 ( ) 0 0
0 0 ( ) 0 0 0 0 0 ( ) 0 0 0
( ) 0 0 0 ( ) 0 ( ) 0 0 0 ( ) 0
0 0 0 0 0 ( ) 0 0 0 0 0 ( )
x x x x
x x
x x x x
x x
(3.11)
Em que, segundo (Castro, 2009)
(3.12)
(3.13)
(3.14)
(3.15)
(3.16)
(3.17)
Tendo tudo isto obtém-se por integração na barra, a matriz de rigidez elementar
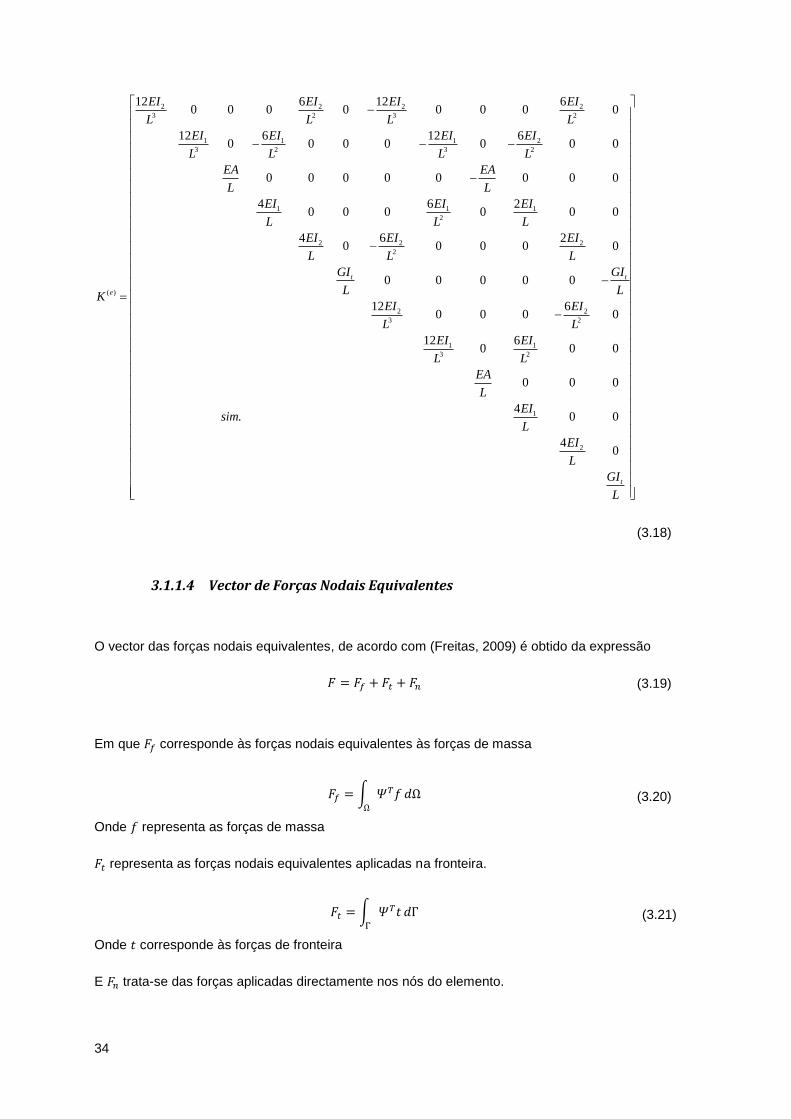
34
2 2 2 2
3 2 3 2
1 1 1 2
3 2 3 2
1 1 1
2
2 2 2
2
( )
2 2
3 2
1 1
3 2
1
12 6 12 60 0 0 0 0 0 0 0
12 6 12 60 0 0 0 0 0 0
0 0 0 0 0 0 0 0
4 6 20 0 0 0 0 0
4 6 20 0 0 0 0
0 0 0 0 0
12 60 0 0 0
12 60 0 0
0 0 0
4. 0 0
t t
e
EI EI EI EI
L L L L
EI EI EI EI
L L L L
EA EA
L L
EI EI EI
L L L
EI EI EI
L L L
GI GI
L LK
EI EI
L L
EI EI
L L
EA
L
EIsim
L
240
t
EI
L
GI
L
(3.18)
3.1.1.4 Vector de Forças Nodais Equivalentes
O vector das forças nodais equivalentes, de acordo com (Freitas, 2009) é obtido da expressão
(3.19)
Em que corresponde às forças nodais equivalentes às forças de massa
(3.20)
Onde representa as forças de massa
representa as forças nodais equivalentes aplicadas na fronteira.
(3.21)
Onde corresponde às forças de fronteira
E trata-se das forças aplicadas directamente nos nós do elemento.
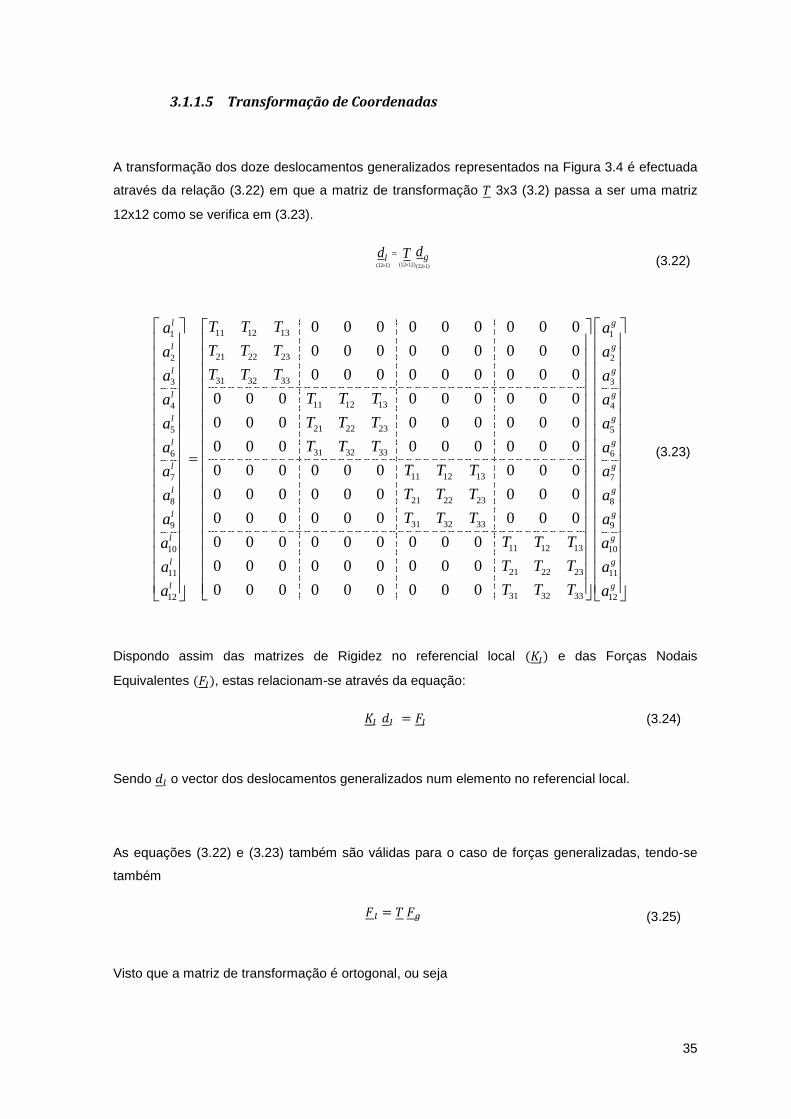
35
3.1.1.5 Transformação de Coordenadas
A transformação dos doze deslocamentos generalizados representados na Figura 3.4 é efectuada
através da relação (3.22) em que a matriz de transformação 3x3 (3.2) passa a ser uma matriz
12x12 como se verifica em (3.23).
(12 12)(12 1) (12 1)
gldd T
(3.22)
11 12 131
21 22 232
31 32 333
11 12 134
21 22 235
31 32 336
11 12 17
8
9
10
11
12
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0
l
l
l
l
l
l
l
l
l
l
l
l
T T Ta
T T Ta
T T Ta
T T Ta
T T Ta
T T Ta
T T Ta
a
a
a
a
a
1
2
3
4
5
6
3 7
21 22 23 8
31 32 33 9
11 12 13 10
21 22 23 11
31 32 33 12
0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
g
g
g
g
g
g
g
g
g
g
g
g
a
a
a
a
a
a
a
T T T a
T T T a
T T T a
T T T a
T T T a
(3.23)
Dispondo assim das matrizes de Rigidez no referencial local e das Forças Nodais
Equivalentes , estas relacionam-se através da equação:
(3.24)
Sendo o vector dos deslocamentos generalizados num elemento no referencial local.
As equações (3.22) e (3.23) também são válidas para o caso de forças generalizadas, tendo-se
também
(3.25)
Visto que a matriz de transformação é ortogonal, ou seja
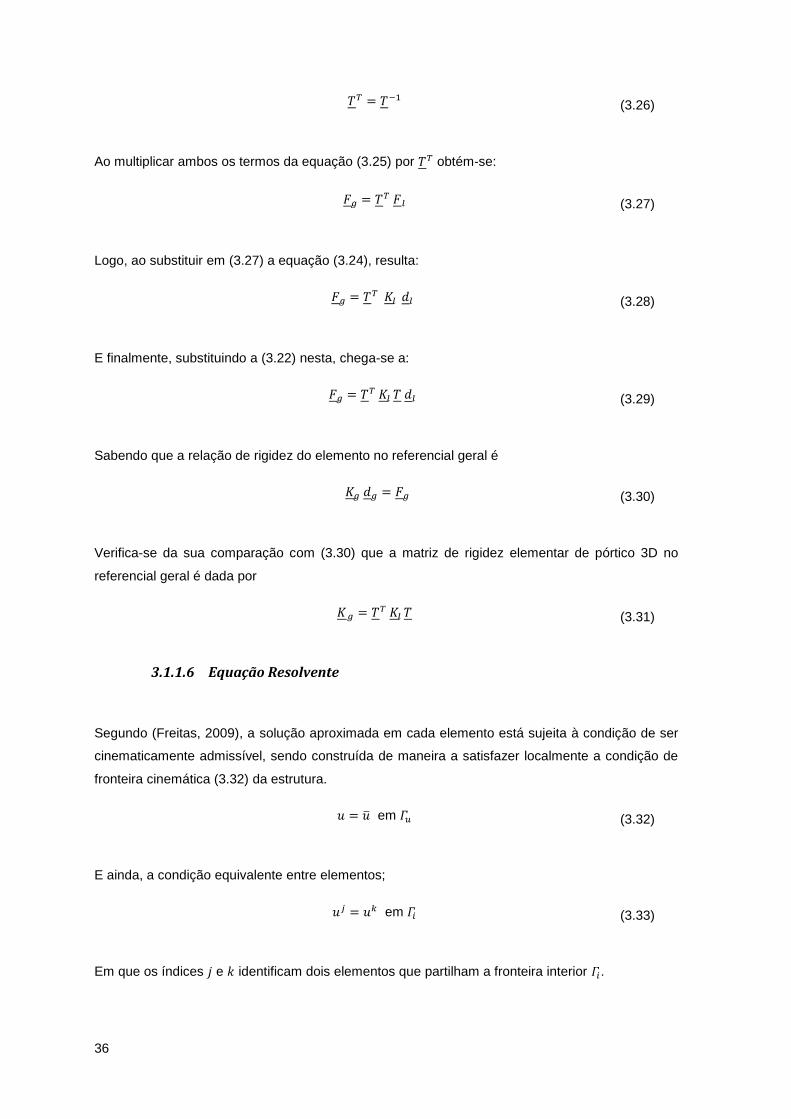
36
(3.26)
Ao multiplicar ambos os termos da equação (3.25) por obtém-se:
(3.27)
Logo, ao substituir em (3.27) a equação (3.24), resulta:
(3.28)
E finalmente, substituindo a (3.22) nesta, chega-se a:
(3.29)
Sabendo que a relação de rigidez do elemento no referencial geral é
(3.30)
Verifica-se da sua comparação com (3.30) que a matriz de rigidez elementar de pórtico 3D no
referencial geral é dada por
(3.31)
3.1.1.6 Equação Resolvente
Segundo (Freitas, 2009), a solução aproximada em cada elemento está sujeita à condição de ser
cinematicamente admissível, sendo construída de maneira a satisfazer localmente a condição de
fronteira cinemática (3.32) da estrutura.
em (3.32)
E ainda, a condição equivalente entre elementos;
em (3.33)
Em que os índices e identificam dois elementos que partilham a fronteira interior .
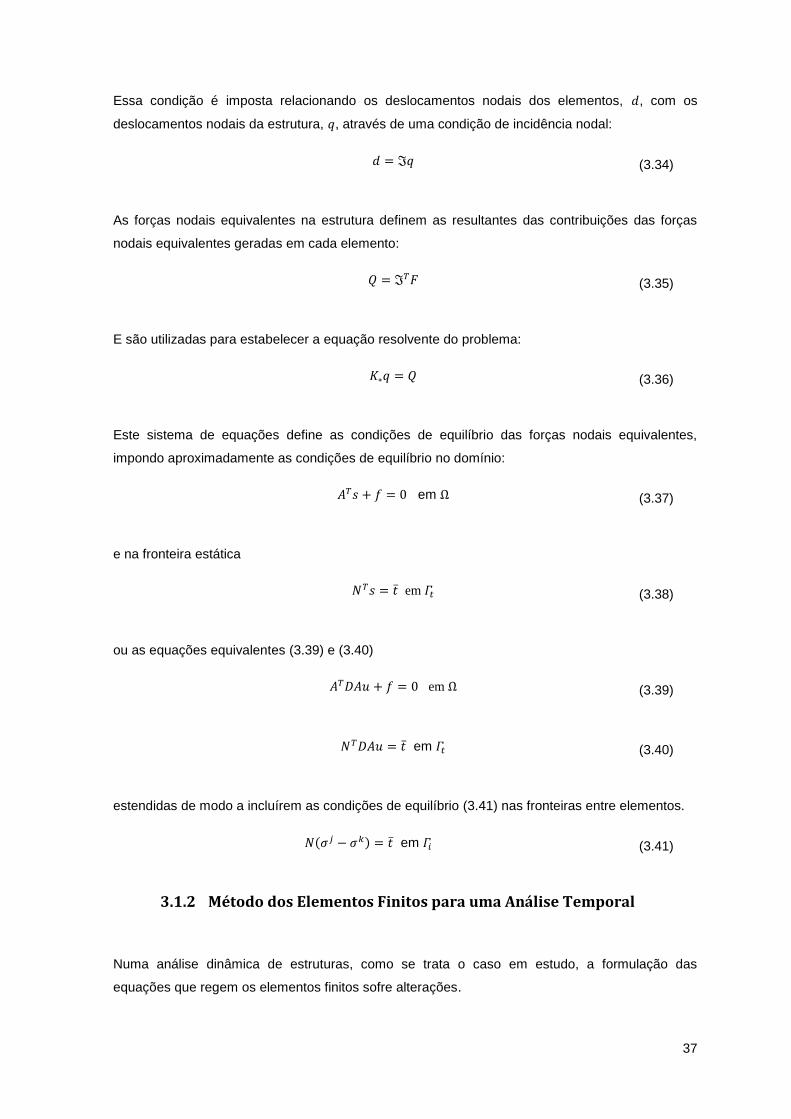
37
Essa condição é imposta relacionando os deslocamentos nodais dos elementos, , com os
deslocamentos nodais da estrutura, , através de uma condição de incidência nodal:
(3.34)
As forças nodais equivalentes na estrutura definem as resultantes das contribuições das forças
nodais equivalentes geradas em cada elemento:
(3.35)
E são utilizadas para estabelecer a equação resolvente do problema:
(3.36)
Este sistema de equações define as condições de equilíbrio das forças nodais equivalentes,
impondo aproximadamente as condições de equilíbrio no domínio:
em (3.37)
e na fronteira estática
em (3.38)
ou as equações equivalentes (3.39) e (3.40)
em (3.39)
em (3.40)
estendidas de modo a incluírem as condições de equilíbrio (3.41) nas fronteiras entre elementos.
em (3.41)
3.1.2 Método dos Elementos Finitos para uma Análise Temporal
Numa análise dinâmica de estruturas, como se trata o caso em estudo, a formulação das
equações que regem os elementos finitos sofre alterações.
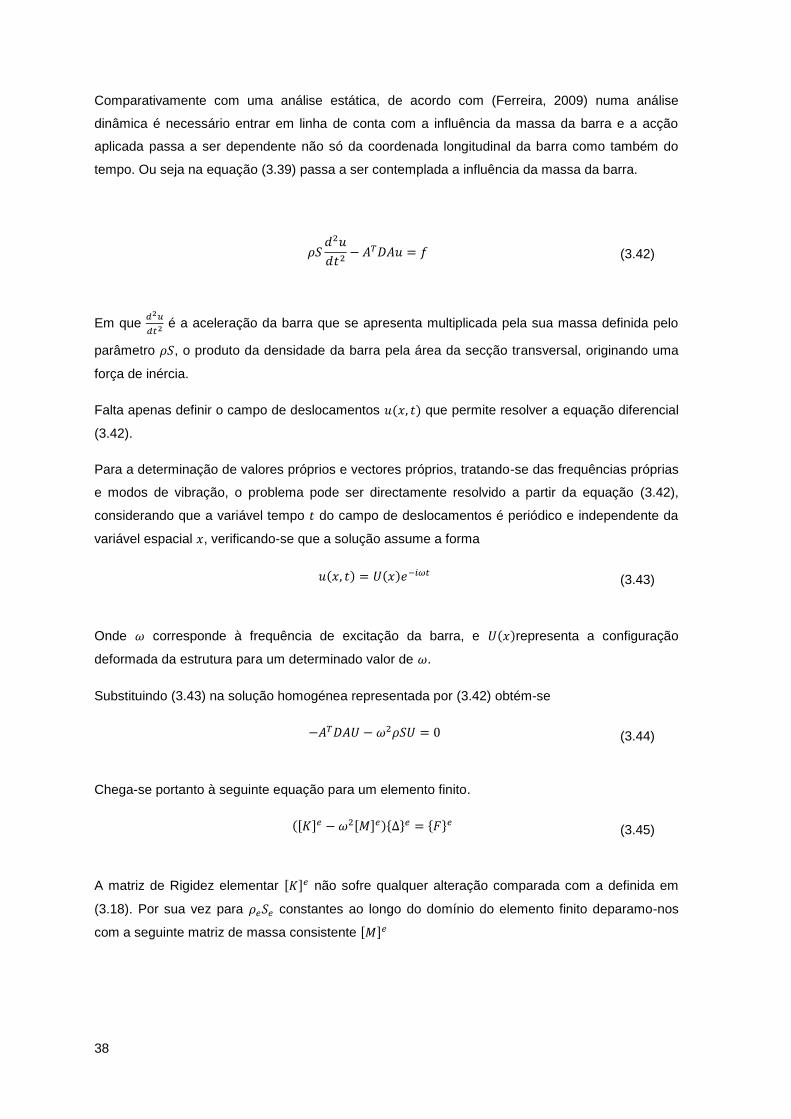
38
Comparativamente com uma análise estática, de acordo com (Ferreira, 2009) numa análise
dinâmica é necessário entrar em linha de conta com a influência da massa da barra e a acção
aplicada passa a ser dependente não só da coordenada longitudinal da barra como também do
tempo. Ou seja na equação (3.39) passa a ser contemplada a influência da massa da barra.
(3.42)
Em que
é a aceleração da barra que se apresenta multiplicada pela sua massa definida pelo
parâmetro , o produto da densidade da barra pela área da secção transversal, originando uma
força de inércia.
Falta apenas definir o campo de deslocamentos que permite resolver a equação diferencial
(3.42).
Para a determinação de valores próprios e vectores próprios, tratando-se das frequências próprias
e modos de vibração, o problema pode ser directamente resolvido a partir da equação (3.42),
considerando que a variável tempo do campo de deslocamentos é periódico e independente da
variável espacial , verificando-se que a solução assume a forma
(3.43)
Onde corresponde à frequência de excitação da barra, e representa a configuração
deformada da estrutura para um determinado valor de .
Substituindo (3.43) na solução homogénea representada por (3.42) obtém-se
(3.44)
Chega-se portanto à seguinte equação para um elemento finito.
(3.45)
A matriz de Rigidez elementar não sofre qualquer alteração comparada com a definida em
(3.18). Por sua vez para constantes ao longo do domínio do elemento finito deparamo-nos
com a seguinte matriz de massa consistente

39
2 2
2
2
2
156 0 0 0 22 0 54 0 0 0 13 0
156 0 22 0 0 0 54 0 13 0 0
140 0 0 0 0 0 70 0 0 0
4 0 0 0 13 0 3 0 0
4 0 13 0 0 0 22 0
0 0 0 0 0 0 0
156 0 0 0 22 0420
156 0 22 0 0
140 0 0 0
4 0 0
4 0
0
e e
e e
e e e
e e e
e e e e
e
e
e
e
L L
L L
L L L
L L L
S LM
L
L
sim L
L
(3.46)
Tendo isto é então necessário acoplar as equações de todos os elementos finitos, como descrito
anteriormente, para determinar a solução global do problema de modo a obter as frequências
próprias da estrutura e respectivos modos de vibração.
3.2 Método de Newmark
O método de Newmark (MN) assume uma forma de integração implícita que procura satisfazer a
equação diferencial no instante utilizando a solução do instante . Em cada instante a
integração é feita através de um conjunto de equações lineares. Recorreu-se a este método tal
como desenvolvido em (Santos, 2008), como ferramenta para validação não só pela facilidade de
processamento numérico, como também pela possibilidade de utilização de uma maior gama de
passos de integração .
Para uma variável , geralmente a série de Taylor permite obter as seguintes equações:
(3.47)
(3.48)
No entanto Newmark apenas considerou as três primeiras derivadas, tendo obtido:
(3.49)
(3.50)

40
Admitindo que a aceleração é linear no passo de integração:
(3.51)
Obtém-se
(3.52)
(3.53)
Tendo isto, para obter as expressões a utilizar no processamento numérico, basta reescrever a
equação fundamental da dinâmica.
(3.54)
Substituindo no conjunto de equações (3.52) e (3.53), a variável a integrar no tempo, verifica-se:
(3.55)
(3.56)
Substituindo as equações (3.55) e (3.56) na equação (3.54) obtém-se a o valor de aceleração no
instante , uma vez conhecidos os valores de deslocamento, velocidade e aceleração no
instante e ainda (conhecida a sua variação).
Obtido , recorre-se novamente às equações (3.55) e (3.56) para obter os valores da
velocidade e deslocamento , tendo assim os valores necessários a utilizar na próxima
iteração.
Na atribuição dos valores dos parâmetros e , tal como em (Santos, 2008) procurou-se utilizar
uma combinação estável, aplicando a regra dos trapézios. Recorreu-se a uma comparação entre
as equações (3.55) e (3.56) com as expressões obtidas da simplificação de Taylor tendo em conta
a aceleração média entre instantes:
(3.57)
(3.58)
Obtendo valores de e .
41
No entanto há várias combinações possíveis para estes parâmetros:
Método da Diferença Central, com e
Método da aceleração linear, com e
No entanto estes dois métodos apresentam-se condicionalmente estáveis, o que torna indesejável
a sua utilização.
De acordo com (Clough & Penzien, 1995) haveria ainda a hipótese de alterar o parâmetro mas
isso implicaria alterar o amortecimento relacionado com o algoritmo o que também não é
desejável.
No entanto, com valores de e , está-se perante um algoritmo estável para
qualquer passo de integração e não introduz amortecimento, ou seja, trata-se de um algoritmo
energeticamente conservativo para o caso de vibração em regime livre.
3.2.1 Geração do Sismo e a sua aplicação no MN
3.2.1.1 Geração do Sismo
Como já foi referido anteriormente, admite-se que as vibrações sísmicas podem ser representadas
por um processo estocástico, estacionário e gaussiano, com densidade espectral de potência
dada pela função .
De tal modo que, segundo (Guerreiro, 1997) para gerar um sismo é então possível gerar
acelerogramas através da sobreposição de séries harmónicas, recorrendo à seguinte expressão:
(3.59)
As amplitudes são definidas para que as acelerações representem o espectro de potências
pretendido. Para isso é necessário que:
(3.60)
Note-se que representa as frequências correspondentes a cada série harmónica considerada,
tendo definido um intervalo . Já corresponde à fase de cada série harmónica e que, com o
objectivo de originar imprevisibilidade à acção sísmica, é definida como uma variável aleatória
uniformemente distribuída no intervalo .
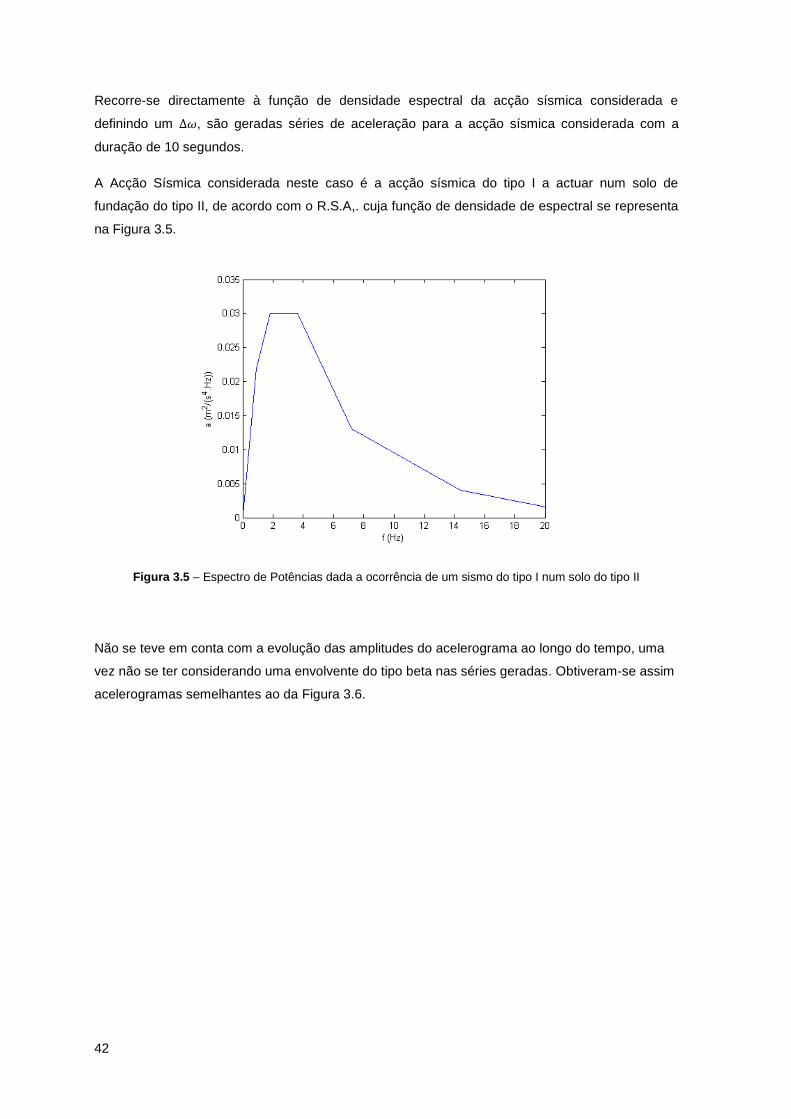
42
Recorre-se directamente à função de densidade espectral da acção sísmica considerada e
definindo um , são geradas séries de aceleração para a acção sísmica considerada com a
duração de 10 segundos.
A Acção Sísmica considerada neste caso é a acção sísmica do tipo I a actuar num solo de
fundação do tipo II, de acordo com o R.S.A,. cuja função de densidade de espectral se representa
na Figura 3.5.
Figura 3.5 – Espectro de Potências dada a ocorrência de um sismo do tipo I num solo do tipo II
Não se teve em conta com a evolução das amplitudes do acelerograma ao longo do tempo, uma
vez não se ter considerando uma envolvente do tipo beta nas séries geradas. Obtiveram-se assim
acelerogramas semelhantes ao da Figura 3.6.
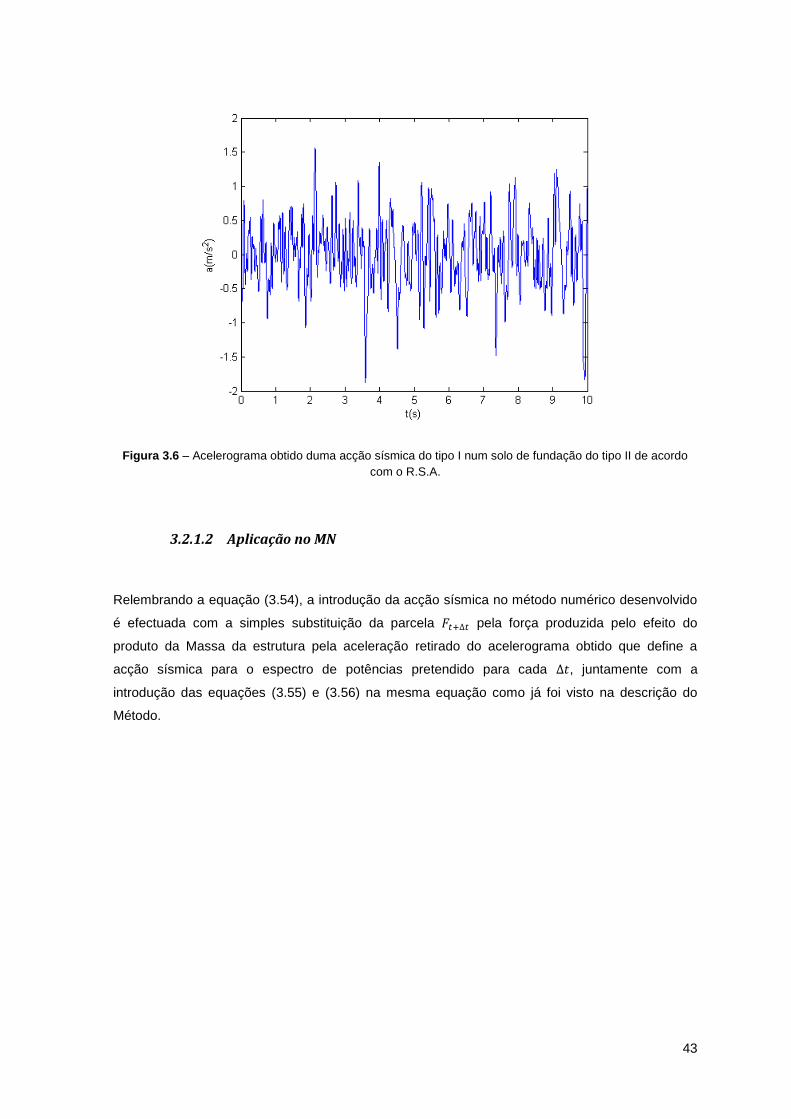
43
Figura 3.6 – Acelerograma obtido duma acção sísmica do tipo I num solo de fundação do tipo II de acordo
com o R.S.A.
3.2.1.2 Aplicação no MN
Relembrando a equação (3.54), a introdução da acção sísmica no método numérico desenvolvido
é efectuada com a simples substituição da parcela pela força produzida pelo efeito do
produto da Massa da estrutura pela aceleração retirado do acelerograma obtido que define a
acção sísmica para o espectro de potências pretendido para cada , juntamente com a
introdução das equações (3.55) e (3.56) na mesma equação como já foi visto na descrição do
Método.

45
Capítulo 4 - Modelo Numérico – Implementação
para o caso tridimensional
Neste capítulo propõe-se uma generalização da técnica proposta por (Ferreira, 2009) utilizada
para o caso bidimensional na qual os esforços são obtidos através de uma análise direccional.
4.1 Combinação dos três esforços
Numa primeira etapa, pegando nos esforços obtidos do MEF, separando em parcela real e parcela
imaginária, obtém-se a sua norma. De seguida analisam-se os conjuntos de esforços no espaço
tridimensional, verificando a ocorrência de desfasamento nos vários pontos do espaço, traduzindo
a interacção. Obtém-se o conjunto de esforços para cada frequência definido por um vector que
traduz a soma direccional dos vectores de cada esforço, calculando posteriormente o conjunto de
esforços máximo somando os vectores associados a cada frequência.
4.1.1 Análise da Interacção .
Como já foi referido anteriormente, o estudo desenvolvido propõe uma análise direccional dos
esforços. Recorrendo ao MEF, quando a estrutura é excitada por uma dada frequência , para a
resposta em regime estacionário, os esforços obtidos numa dada secção s são:
(4.1)
(4.2)
(4.3)
Onde representa a parcela real, e a parcela imaginária dos respectivos esforços no domínio
dos números complexos para uma frequência de excitação .
Os valores obtidos dos esforços são variáveis ao longo do tempo como se pode verificar nas
equações (4.1), (4.2) e (4.3).

46
Uma vez que a fase de cada esforço é dada por:
(4.4)
E que a norma dos mesmos é definida pelas expressões:
(4.5)
(4.6)
(4.7)
Podem-se redigir os esforços podem pelas expressões:
(4.8)
(4.9)
(4.10)
Como tal, tratando-se de número complexos, , e são representados por
uma circunferência de raio , e .
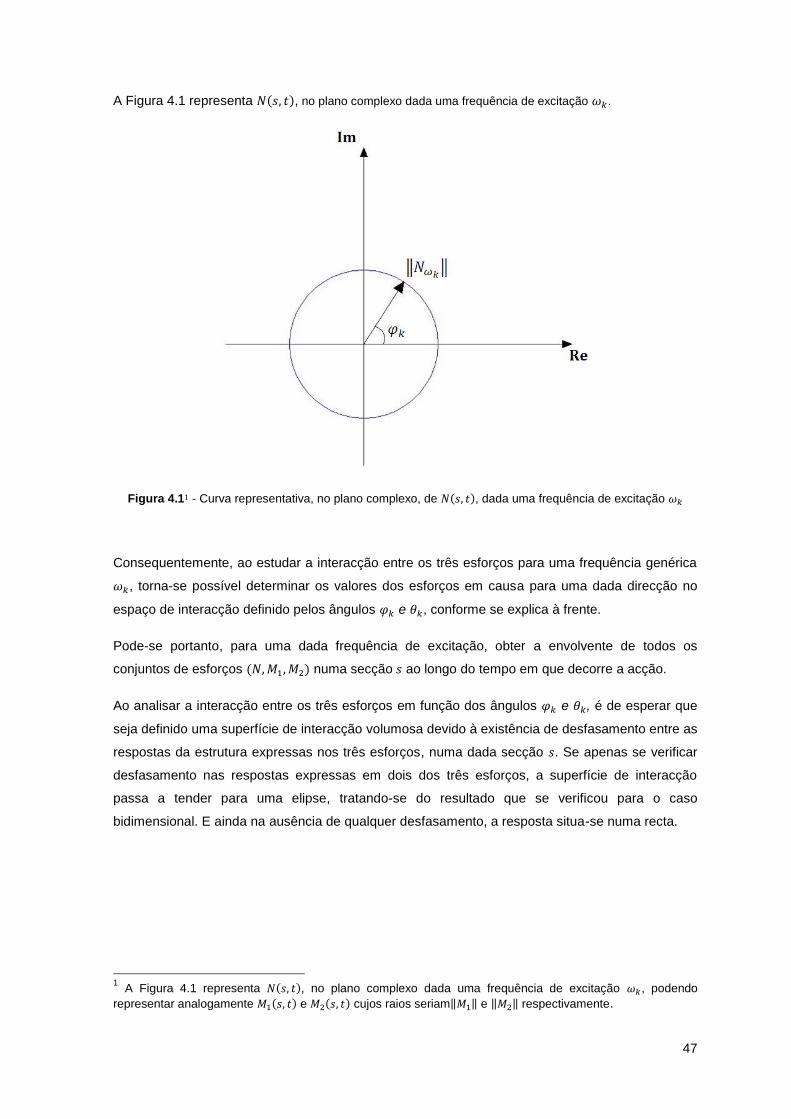
47
A Figura 4.1 representa , no plano complexo dada uma frequência de excitação .
Figura 4.11 - Curva representativa, no plano complexo, de , dada uma frequência de excitação
Consequentemente, ao estudar a interacção entre os três esforços para uma frequência genérica
, torna-se possível determinar os valores dos esforços em causa para uma dada direcção no
espaço de interacção definido pelos ângulos e , conforme se explica à frente.
Pode-se portanto, para uma dada frequência de excitação, obter a envolvente de todos os
conjuntos de esforços numa secção ao longo do tempo em que decorre a acção.
Ao analisar a interacção entre os três esforços em função dos ângulos e , é de esperar que
seja definido uma superfície de interacção volumosa devido à existência de desfasamento entre as
respostas da estrutura expressas nos três esforços, numa dada secção . Se apenas se verificar
desfasamento nas respostas expressas em dois dos três esforços, a superfície de interacção
passa a tender para uma elipse, tratando-se do resultado que se verificou para o caso
bidimensional. E ainda na ausência de qualquer desfasamento, a resposta situa-se numa recta.
1 A Figura 4.1 representa , no plano complexo dada uma frequência de excitação , podendo
representar analogamente e cujos raios seriam e respectivamente.
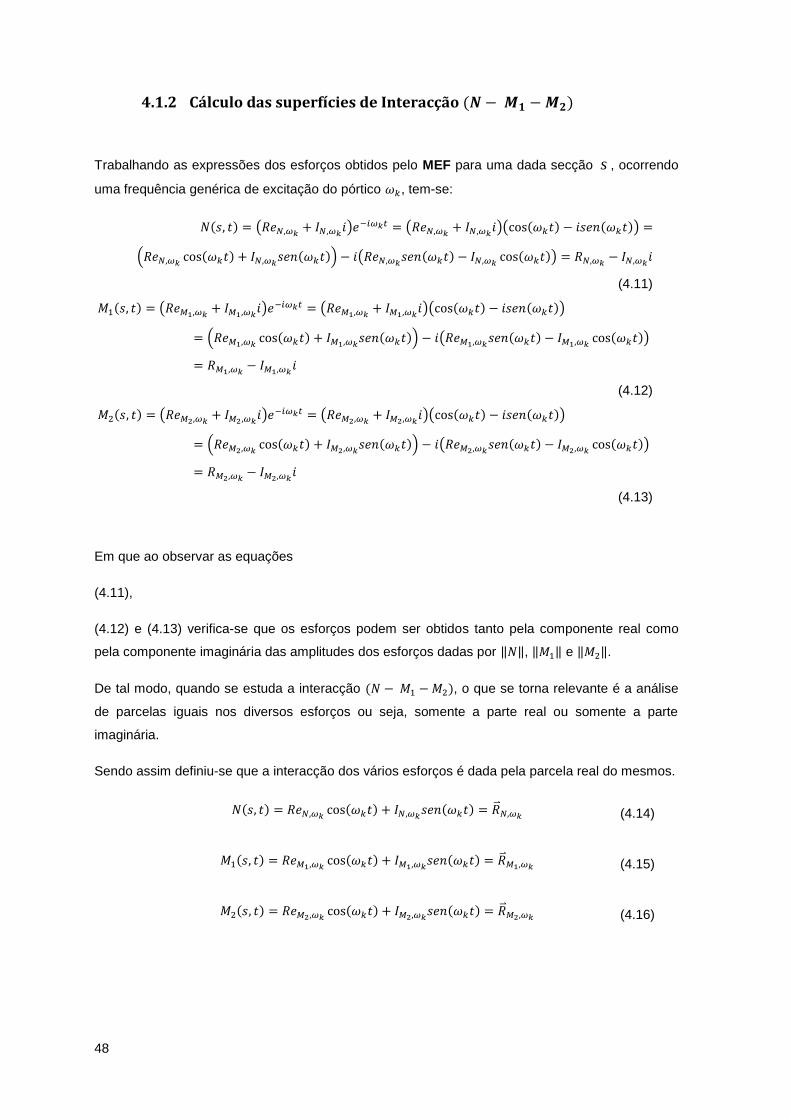
48
4.1.2 Cálculo das superfícies de Interacção
Trabalhando as expressões dos esforços obtidos pelo MEF para uma dada secção s , ocorrendo
uma frequência genérica de excitação do pórtico , tem-se:
(4.11)
(4.12)
(4.13)
Em que ao observar as equações
(4.11),
(4.12) e (4.13) verifica-se que os esforços podem ser obtidos tanto pela componente real como
pela componente imaginária das amplitudes dos esforços dadas por , e .
De tal modo, quando se estuda a interacção , o que se torna relevante é a análise
de parcelas iguais nos diversos esforços ou seja, somente a parte real ou somente a parte
imaginária.
Sendo assim definiu-se que a interacção dos vários esforços é dada pela parcela real do mesmos.
(4.14)
(4.15)
(4.16)

49
Pelo facto dos valores obtidos dos esforços se verificarem em função do tempo, os máximos dos
esforços podem não ocorrer em simultâneo, existindo a necessidade de definir estes valores para
as diversas direcções no espaço, as quais são definidas num sistema de coordenadas em
que mede a orientação no plano “ ” e a elevação, conforme representada na Figura
4.2.
Figura 4.2 – Sistema de coordenadas em que mede a orientação no plano “ ” e a elevação
A partir de tais direcções, obtêm-se os vários conjuntos de esforços .
São assim definidos e com o intuito de definir as várias direcções no espaço:
(4.17)
(4.18)
Sendo definidas da seguinte forma:
(4.19)
(4.20)
50
Ficam assim abrangidas todas as direcções para valores nos quatro octantes superiores do
espaço dos esforços.
Aplicando simples regras de simetria, obtêm-se os esforços máximos em todas as direcções nos
restantes octantes.
E reúnem-se assim as condições para calcular o conjunto de esforços na superfície de interacção
duma secção quando a estrutura é excitada por uma frequência genérica, segundo as
direcções e , recorrendo a um vector .
Onde:
(4.21)
Que definido pelas parcelas reais dos esforços fica:
(4.22)
Figura 4.3 – Definição de um conjunto de esforços numa dada superfície de interacção
Tal como reflecte a equação (4.22), o vector estabelece a projecção da soma dos vectores
dos esforços ,
e , sobre a recta definida pelos ângulos e , que passa na
origem do sistema de eixos que caracteriza o espaço de interacção .
51
Logo, para definir um conjunto de esforços, é necessário obter os vectores dos esforços que
produzem o maior vector projecção , para uma frequência de excitação . Para tal é
necessário determinar a partir do ângulo o instante em que o vector de projecção é
máximo, introduzindo-o posteriormente nas equações (4.14), (4.15) e (4.16).
A expressão matemática que traduz esse raciocínio é dada por:
(4.23)
ou seja,
(4.24)
Como a parte real e imaginária desta expressão têm de se anular, esta define um sistema de duas
equações, que são resolvidas em função de e , as componentes do versor
correspondente ao instante .
Conhecido o valor do ângulo e substituindo-o nas equações (4.14), (4.15) e (4.16) define-se
o conjunto de esforços correspondente, para a frequência de excitação
considerada.
Repetindo o processo para as diversas direcções definidas por e obtém-se a interacção
para a frequência em causa, que resulta numa superfície de interacção com algum
volume.
Por último, refazendo todo este processo para todas as frequências de excitação definidas
anteriormente, obtêm-se todas as curvas de interacção para o espectro de
frequências escolhido.
Há ainda que ter em linha de conta que todo este processo é desenvolvido, com a acção sísmica a
actuar apenas numa direcção. Ao repetir o processo para uma gama de direcções, visto ser
desconhecida a direcção de actuação da acção sísmica, a superfície de interacção ganha volume,
pois haverá direcções de actuação da acção sísmica em que existe mais desfasamento entre as
três respostas que outras.
52
4.1.3 Combinação das Curvas de Interacção
Obtidas as superfícies de interacção em todo o espectro de frequências, a questão
que se coloca é como combiná-las de modo a obter os conjuntos de esforços de
dimensionamento de uma secção .
Visto não existir qualquer relação de dependência entre as frequências analisadas, o vector
projecção que origina a máxima combinação possível de todas as frequências analisadas,
é dada pelo somatório dos vectores projecção de cada frequência analisada.
Assim sendo, calculados o máximo dos vectores para cada frequência discreta ,
determinam-se posteriormente os respectivos conjuntos de esforços , de tal modo que a
soma dos vários conjuntos origina o conjunto de esforços de combinação que
define o vector .
Repetindo o procedimento para todas as direcções definidas por e obtém-se por fim a
superfície de interacção de dimensionamento.
A definição da acção para cada frequência é feita a partir do espectro de potência de aceleração
do sismo, como se apresenta no próximo subcapítulo.
4.2 Definição da Acção Dinâmica
Para se processar o estudo dinâmico do pórtico é ainda necessário definir a acção.
Também aqui as técnicas utilizadas são as mesmas que as implementadas para o caso
bidimensional em (Ferreira, 2009). O objectivo é obter os valores esperados do máximo de cada
esforço partindo de uma função de densidade espectral de potência de aceleração definida para
uma acção sísmica.
4.2.1 Resposta da Estrutura
A resposta da estrutura é dada por um processo estocástico Gaussiano ergódico estacionário, de
modo que as funções densidade espectral dos conjuntos de esforços verificados nas secções da
estrutura são dadas por:
(4.25)
53
(4.26)
(4.27)
Em que os vectores , e
correspondem respectivamente aos vectores de ,
de e de que solicitam as secções da estrutura em função da frequência de excitação, que
foram calculados pelo MEF.
Note-se que tais vectores estão intimamente relacionados com as funções de receptância de cada
grau de liberdade da estrutura, uma vez que são calculados para uma aceleração unitária.
Assim sendo, na definição dos esforços que solicitam a estrutura devido a uma acção dinâmica,
deve-se multiplicar os esforços obtidos para uma aceleração unitária pela aceleração associada à
frequência de excitação da acção. Ora, sendo a acção dinâmica definida por uma função de
densidade espectral de potência de aceleração, , é possível determinar uma função de
densidade de esforços originados pela resposta da estrutura, tal como demonstrado nas equações
(4.25), (4.26) e (4.27).
Note que é uma função que define o quadrado do valor da aceleração por unidade de
frequência, logo ao se estabelecer uma função de densidades espectral de esforços, para as
diferentes secções da estrutura, os seus resultados para uma aceleração unitária também
apresentarão o seu valor quadrático, justificando-se assim a multiplicação pelos respectivos
conjugados nas respectivas equações (4.25), (4.26) e (4.27).
4.2.2 Calculo dos esforços devido à acção dinâmica
Ao restringir o cálculo da resposta para uma determinada secção , tem-se as seguintes funções
de densidade espectral:
(4.28)
(4.29)
(4.30)

54
Os resultados obtidos destas equações, para uma aceleração unitária apresentam o seu valor
quadrático. Por conseguinte a função de densidade espectral de resposta da estrutura define o
quadrado do valor da resposta por unidade de frequência da excitação, ou seja as equações
(4.28), (4.29) e (4.30) definem o quadrado do valor do esforço normal, o quadrado do momento
flector e o quadrado do momento flector numa determinada secção .
De tal modo, os valores esperados dos esforços , e numa determinada secção , são
obtidos através das respectivas expressões:
(4.31)
(4.32)
(4.33)
Querendo obter o valor máximo de cada esforço numa dada secção , procede-se à multiplicação
dos valores esperados dos esforços definidos anteriormente, por um valor constante definido
para cada esforço.
(4.34)
(4.35)
(4.36)
Tal constante tem em conta o número de passagens ascendentes ( ) pelo nível 0,
dependendo estas da frequência de excitação que solicita cada esforço, sendo obtido aplicando a
expressão:
(4.37)
Onde, de acordo com (Clough & Penzien, 1995) corresponde à constante de Euler apresentando
um valor igual a 0,5772, enquanto a parcela corresponde na prática ao número de passagens
pelo nível 0 como já foi referido.
55
De modo a obter o valor mais aproximado possível para cada esforço actuante devido à acção
sísmica, efectuou-se o cálculo analítico do parâmetro , que é posteriormente multiplicado pelo
tempo de duração da acção sísmica ( ).
(4.38)
De acordo com os mesmos autores, para obter e para cada esforço actuante, recorre-se à
expressão:
(4.39)
Ou seja:
(4.40)
(4.41)
(4.42)
e
(4.43)
(4.44)
(4.45)
Calculados todos estes parâmetros, facilmente são obtidos os valores de , e
.
No entanto para se obter a combinação de todas as interacções possíveis entre os esforços
calculados, efectua-se a integração das derivadas dos respectivos valores esperados dos
máximos de cada esforço em todo o espectro de frequências definido, obtendo-se a sua taxa de
crescimento em função da frequência de excitação .
A contribuição de cada frequência para a definição dos esforços de dimensionamento apresenta-
se na Figura 4.4, e expressa-se nos esforços da seguinte forma:
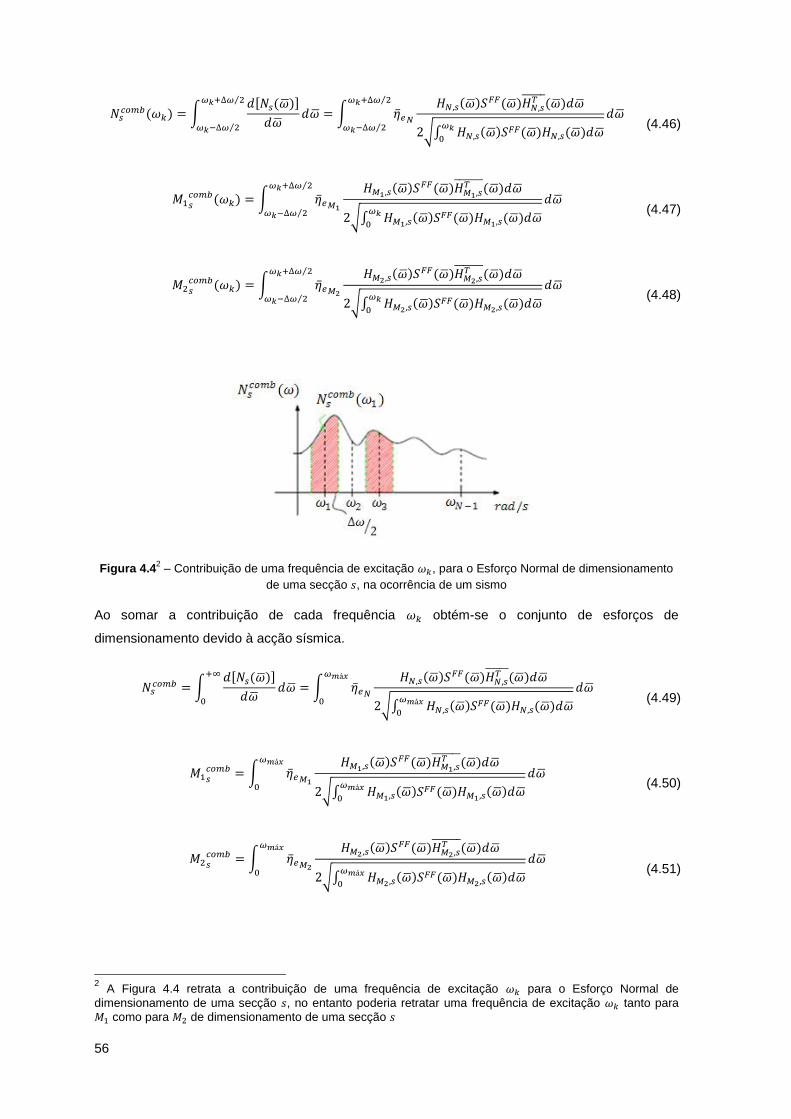
56
(4.46)
(4.47)
(4.48)
Figura 4.42 – Contribuição de uma frequência de excitação , para o Esforço Normal de dimensionamento
de uma secção , na ocorrência de um sismo
Ao somar a contribuição de cada frequência obtém-se o conjunto de esforços de
dimensionamento devido à acção sísmica.
(4.49)
(4.50)
(4.51)
2 A Figura 4.4 retrata a contribuição de uma frequência de excitação para o Esforço Normal de
dimensionamento de uma secção , no entanto poderia retratar uma frequência de excitação tanto para
como para de dimensionamento de uma secção

57
Para uma resposta harmónica, com uma frequência de excitação , numa determinada secção s,
os esforços, comparados com os esforços devido a uma aceleração unitária, apenas variam na
sua fase de modo que para cada frequência de excitação estabelecem-se as seguintes relações:
(4.52)
(4.53)
(4.54)
Os parâmetros ,
e correspondem às acelerações equivalentes que surgem na
base da estrutura quando esta é excitada por uma frequência , devido à acção sísmica, e que
provocam numa determinada secção s ,
e respectivamente,
definindo assim os esforços que caracterizam as superfícies de interacção.
(4.55)
(4.56)
(4.57)

59
Capítulo 5 - Casos de estudo
Neste capítulo estudaram-se dois exemplos concretos:
Uma estrutura porticada regular bissimétrica com um piso, e posteriormente com dois
pisos.
Uma estrutura irregular de um piso, com duas massas concentradas excentricas.
Obtiveram-se as superfícies de interacção de esforços e os valores máximos dos Esforços obtidos
da análise direccional de esforços, do MN e do método de sobreposição modal CQC.
5.1 Pórtico Regular
5.1.1 Definição de Modelo
Num primeiro Exemplo considerou-se um pórtico regular simétrico de Betão Armado com pilares
de 3,5 metros de altura e vigas com vão de 6 m. Tanto as vigas como os pilares apresentam uma
secção de 60x30 cm2. Os pilares apresentam-se orientados com a sua maior direcção segundo y
e as vigas segundo z..
O pórtico é assim definido em 8 “macro-nós”, que correspondem aos nós de ligação entre as
barras, e consequentemente por 8 “macro-barras”, tratando-se estas das vigas e pilares, como se
verifica na Figura 5.1.
60
Figura 5.1 – Pórtico Tridimensional de um piso
De modo a obter uma descritização razoável da estrutura optou-se por dividir cada “macro-barra”
em 10 barras (10 elementos finitos).
Cada “macro-nó” foi definido pelas suas coordenadas, pelas restrições aos deslocamentos que lhe
estão associados e pela sua massa. Considerou-se que os pilares se encontram encastrados ao
terreno, ou seja os “macro-nós” 1,2,3 e 4 apresentam todos os movimentos restringidos. Os
restantes “macro-nós” não apresentam qualquer restrição a nenhum dos 6 deslocamentos,
apresentando portanto os 6 graus de liberdade. Relativamente à massa, nenhum “macro-nó”
apresenta massa associada pelo facto desta estar distribuída pelas barras como se viu atrás (na
definição da matriz de massa).
As “macro-barras” foram definidas pela sua secção pelos “macro-nós” que as definem e ainda por
um vector auxiliar.
Cada secção foi definida pelas rigidezes de flexão nas duas direcções, rigidez axial, rigidez de
torção e pela sua massa. A única diferença na definição das secções das vigas, em relação aos
pilares, foi o facto de se ter acrescentado uma sobrecarga de 40 kN/m à sua massa.
O vector auxiliar permite definir a orientação da secção uma vez que este é definido de modo a
fazer a mudança de coordenadas do eixo global para o eixo local.
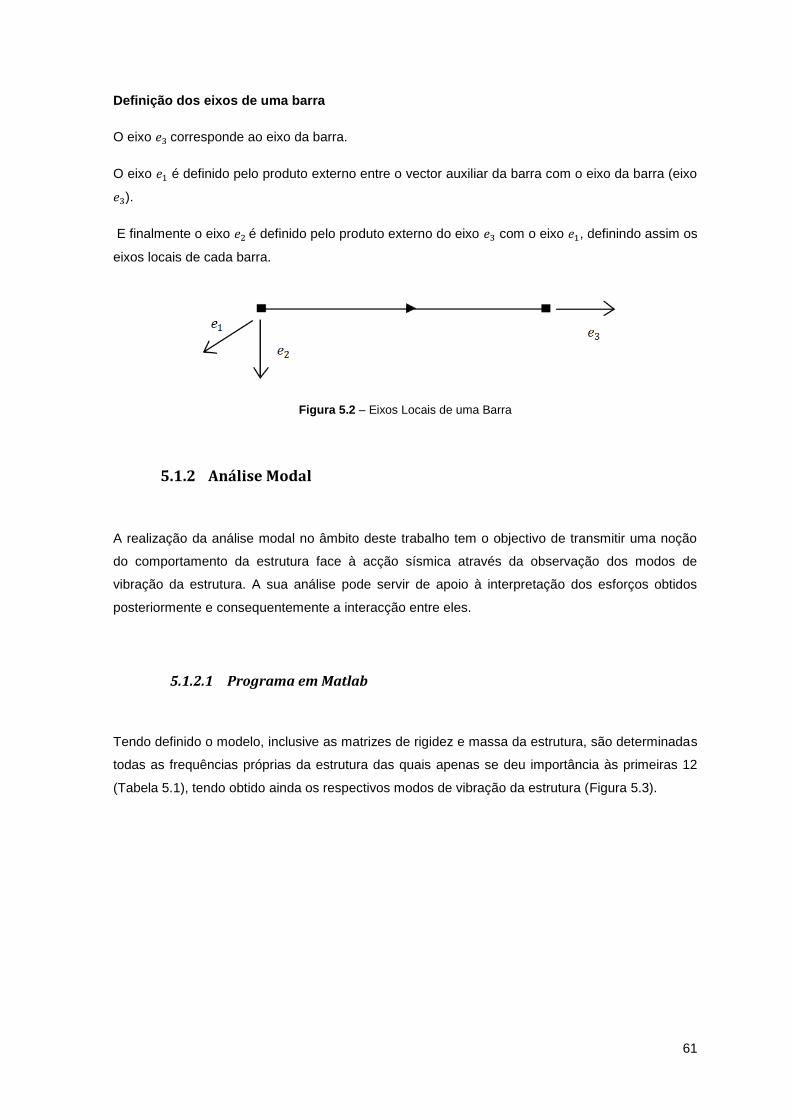
61
Definição dos eixos de uma barra
O eixo corresponde ao eixo da barra.
O eixo é definido pelo produto externo entre o vector auxiliar da barra com o eixo da barra (eixo
).
E finalmente o eixo é definido pelo produto externo do eixo com o eixo , definindo assim os
eixos locais de cada barra.
Figura 5.2 – Eixos Locais de uma Barra
5.1.2 Análise Modal
A realização da análise modal no âmbito deste trabalho tem o objectivo de transmitir uma noção
do comportamento da estrutura face à acção sísmica através da observação dos modos de
vibração da estrutura. A sua análise pode servir de apoio à interpretação dos esforços obtidos
posteriormente e consequentemente a interacção entre eles.
5.1.2.1 Programa em Matlab
Tendo definido o modelo, inclusive as matrizes de rigidez e massa da estrutura, são determinadas
todas as frequências próprias da estrutura das quais apenas se deu importância às primeiras 12
(Tabela 5.1), tendo obtido ainda os respectivos modos de vibração da estrutura (Figura 5.3).
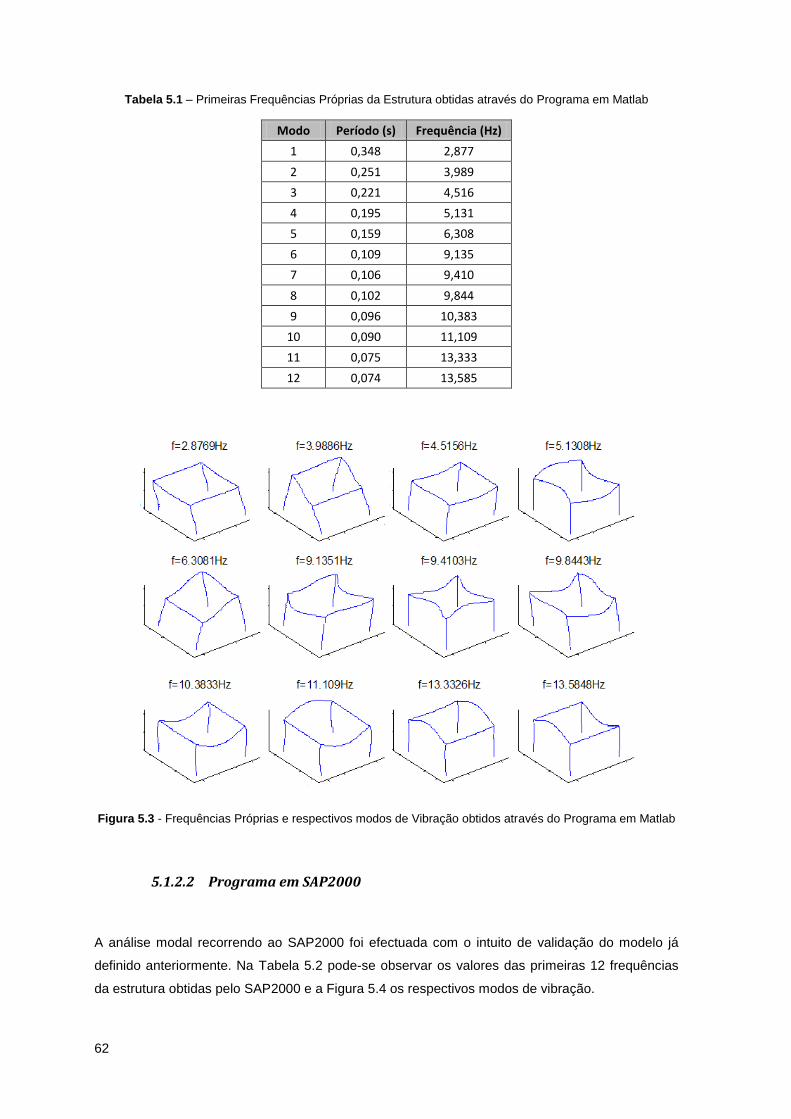
62
Tabela 5.1 – Primeiras Frequências Próprias da Estrutura obtidas através do Programa em Matlab
Modo Período (s) Frequência (Hz)
1 0,348 2,877
2 0,251 3,989
3 0,221 4,516
4 0,195 5,131
5 0,159 6,308
6 0,109 9,135
7 0,106 9,410
8 0,102 9,844
9 0,096 10,383
10 0,090 11,109
11 0,075 13,333
12 0,074 13,585
Figura 5.3 - Frequências Próprias e respectivos modos de Vibração obtidos através do Programa em Matlab
5.1.2.2 Programa em SAP2000
A análise modal recorrendo ao SAP2000 foi efectuada com o intuito de validação do modelo já
definido anteriormente. Na Tabela 5.2 pode-se observar os valores das primeiras 12 frequências
da estrutura obtidas pelo SAP2000 e a Figura 5.4 os respectivos modos de vibração.
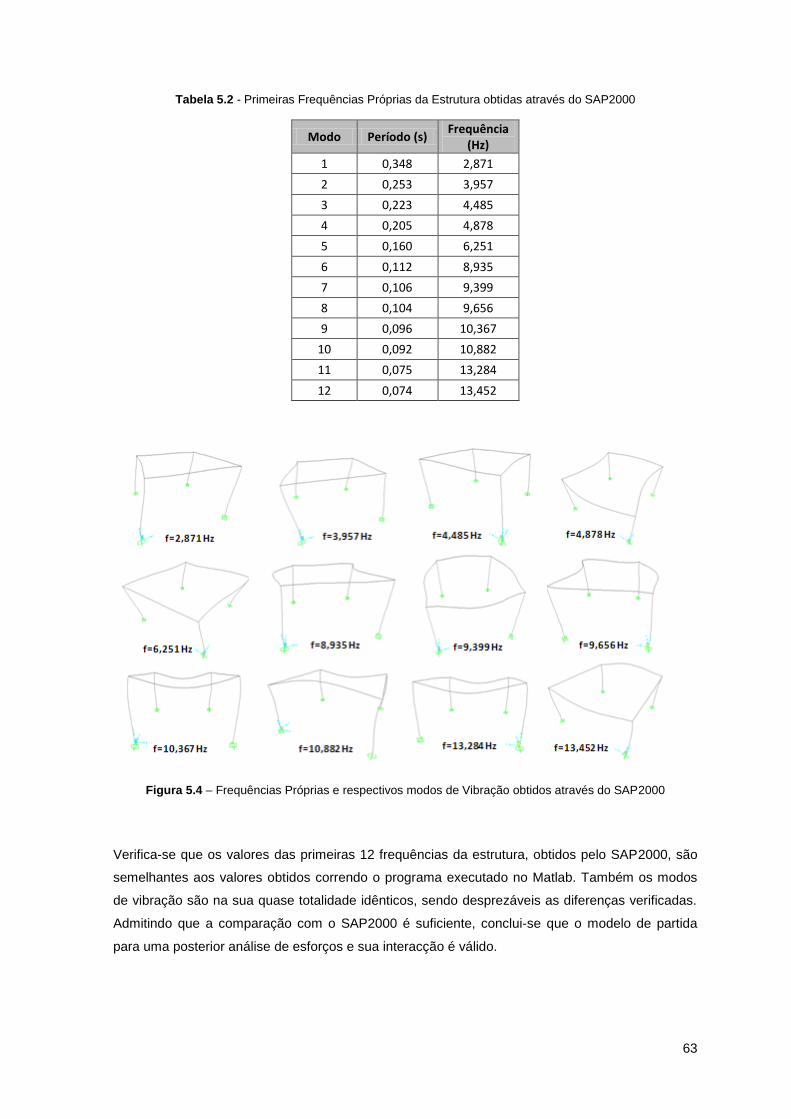
63
Tabela 5.2 - Primeiras Frequências Próprias da Estrutura obtidas através do SAP2000
Modo Período (s) Frequência
(Hz)
1 0,348 2,871
2 0,253 3,957
3 0,223 4,485
4 0,205 4,878
5 0,160 6,251
6 0,112 8,935
7 0,106 9,399
8 0,104 9,656
9 0,096 10,367
10 0,092 10,882
11 0,075 13,284
12 0,074 13,452
Figura 5.4 – Frequências Próprias e respectivos modos de Vibração obtidos através do SAP2000
Verifica-se que os valores das primeiras 12 frequências da estrutura, obtidos pelo SAP2000, são
semelhantes aos valores obtidos correndo o programa executado no Matlab. Também os modos
de vibração são na sua quase totalidade idênticos, sendo desprezáveis as diferenças verificadas.
Admitindo que a comparação com o SAP2000 é suficiente, conclui-se que o modelo de partida
para uma posterior análise de esforços e sua interacção é válido.
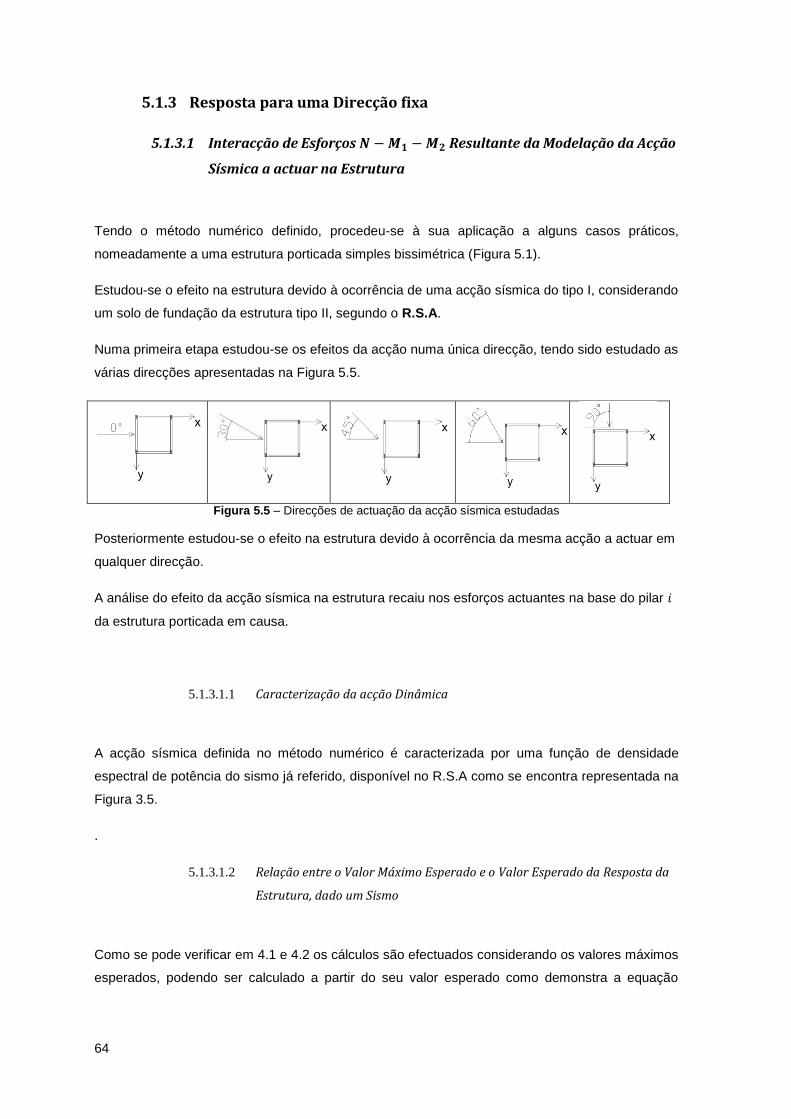
64
5.1.3 Resposta para uma Direcção fixa
5.1.3.1 Interacção de Esforços Resultante da Modelação da Acção
Sísmica a actuar na Estrutura
Tendo o método numérico definido, procedeu-se à sua aplicação a alguns casos práticos,
nomeadamente a uma estrutura porticada simples bissimétrica (Figura 5.1).
Estudou-se o efeito na estrutura devido à ocorrência de uma acção sísmica do tipo I, considerando
um solo de fundação da estrutura tipo II, segundo o R.S.A.
Numa primeira etapa estudou-se os efeitos da acção numa única direcção, tendo sido estudado as
várias direcções apresentadas na Figura 5.5.
Figura 5.5 – Direcções de actuação da acção sísmica estudadas
Posteriormente estudou-se o efeito na estrutura devido à ocorrência da mesma acção a actuar em
qualquer direcção.
A análise do efeito da acção sísmica na estrutura recaiu nos esforços actuantes na base do pilar
da estrutura porticada em causa.
5.1.3.1.1 Caracterização da acção Dinâmica
A acção sísmica definida no método numérico é caracterizada por uma função de densidade
espectral de potência do sismo já referido, disponível no R.S.A como se encontra representada na
Figura 3.5.
.
5.1.3.1.2 Relação entre o Valor Máximo Esperado e o Valor Esperado da Resposta da
Estrutura, dado um Sismo
Como se pode verificar em 4.1 e 4.2 os cálculos são efectuados considerando os valores máximos
esperados, podendo ser calculado a partir do seu valor esperado como demonstra a equação
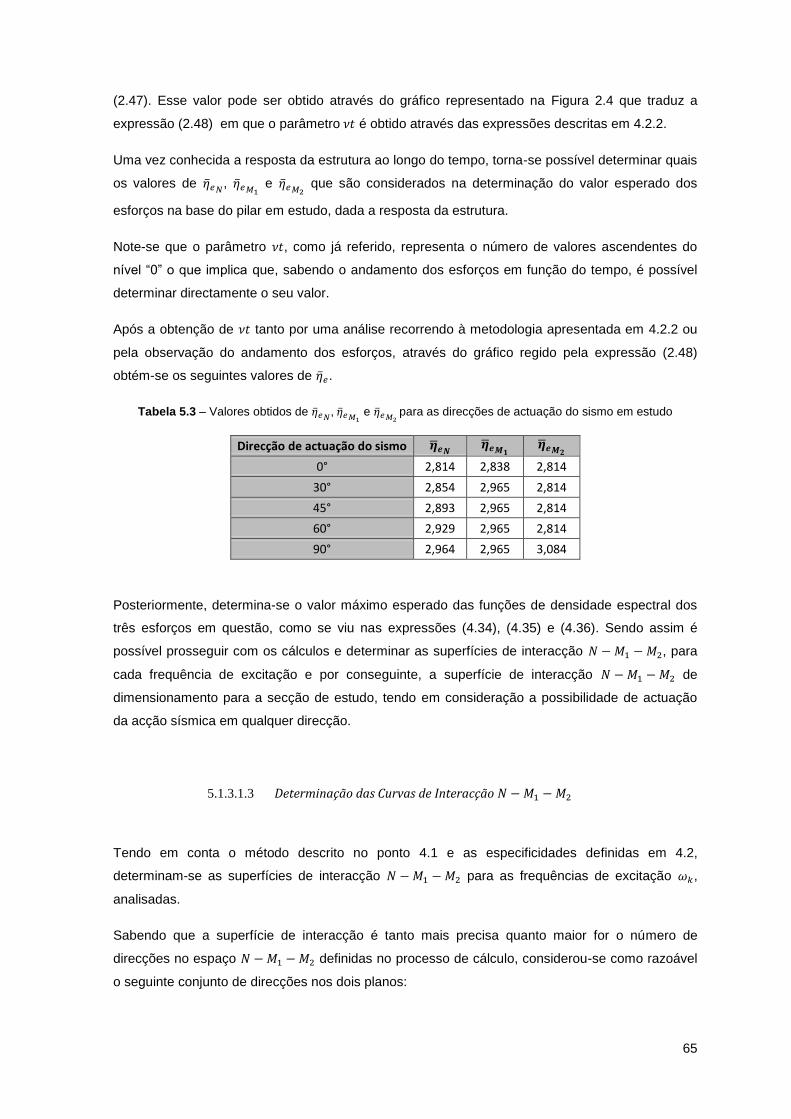
65
(2.47). Esse valor pode ser obtido através do gráfico representado na Figura 2.4 que traduz a
expressão (2.48) em que o parâmetro é obtido através das expressões descritas em 4.2.2.
Uma vez conhecida a resposta da estrutura ao longo do tempo, torna-se possível determinar quais
os valores de , e
que são considerados na determinação do valor esperado dos
esforços na base do pilar em estudo, dada a resposta da estrutura.
Note-se que o parâmetro , como já referido, representa o número de valores ascendentes do
nível “0” o que implica que, sabendo o andamento dos esforços em função do tempo, é possível
determinar directamente o seu valor.
Após a obtenção de tanto por uma análise recorrendo à metodologia apresentada em 4.2.2 ou
pela observação do andamento dos esforços, através do gráfico regido pela expressão (2.48)
obtém-se os seguintes valores de .
Tabela 5.3 – Valores obtidos de , e
para as direcções de actuação do sismo em estudo
Direcção de actuação do sismo
0° 2,814 2,838 2,814
30° 2,854 2,965 2,814
45° 2,893 2,965 2,814
60° 2,929 2,965 2,814
90° 2,964 2,965 3,084
Posteriormente, determina-se o valor máximo esperado das funções de densidade espectral dos
três esforços em questão, como se viu nas expressões (4.34), (4.35) e (4.36). Sendo assim é
possível prosseguir com os cálculos e determinar as superfícies de interacção , para
cada frequência de excitação e por conseguinte, a superfície de interacção de
dimensionamento para a secção de estudo, tendo em consideração a possibilidade de actuação
da acção sísmica em qualquer direcção.
5.1.3.1.3 Determinação das Curvas de Interacção
Tendo em conta o método descrito no ponto 4.1 e as especificidades definidas em 4.2,
determinam-se as superfícies de interacção para as frequências de excitação ,
analisadas.
Sabendo que a superfície de interacção é tanto mais precisa quanto maior for o número de
direcções no espaço definidas no processo de cálculo, considerou-se como razoável
o seguinte conjunto de direcções nos dois planos:
66
Sendo que as direcções e são dadas pelas equações (4.19) e (4.20).
Todo o processo de cálculo da superfície de interacção decorre tal como definido em
4.1.3.
5.1.3.1.4 Combinação das Diferentes Curvas de Interacção
Finalmente estabelece-se a combinação das diferentes superfícies de interacção para a
frequência , a fim de determinar a superfície final para efeitos de dimensionamento. O processo
numérico está descrito em 4.1.3.
Na definição da superfície final de dimensionamento, é mais uma vez necessário ter em conta a
possibilidade de actuação da acção sísmica na estrutura em qualquer direcção.
5.1.3.1.5 Resultados
Tendo o modelo numérico implementado que descreve a análise direccional de esforços definido,
executou-se o mesmo para a acção sísmica a actuar na estrutura somente numa direcção com o
intuito de analisar os esforços actuantes e a sua interacção no pilar do pórtico. Foi-se alterando a
direcção de actuação da acção sísmica, analisando novamente os resultados.
As direcções de actuação da acção sísmica para a análise foram 0˚, 30˚, 45˚, 60˚ e 90˚.
Verifica-se suficiente analisar os esforços para direcções entre os 0˚ e 90˚ pois qualquer direcção
da acção sísmica entre e 90˚ e 360˚, solicita o mesmo pilar de forma semelhante. E as direcções
descritas acima também são suficientes para análise da evolução dos esforços com a alteração da
direcção de actuação da acção sísmica.
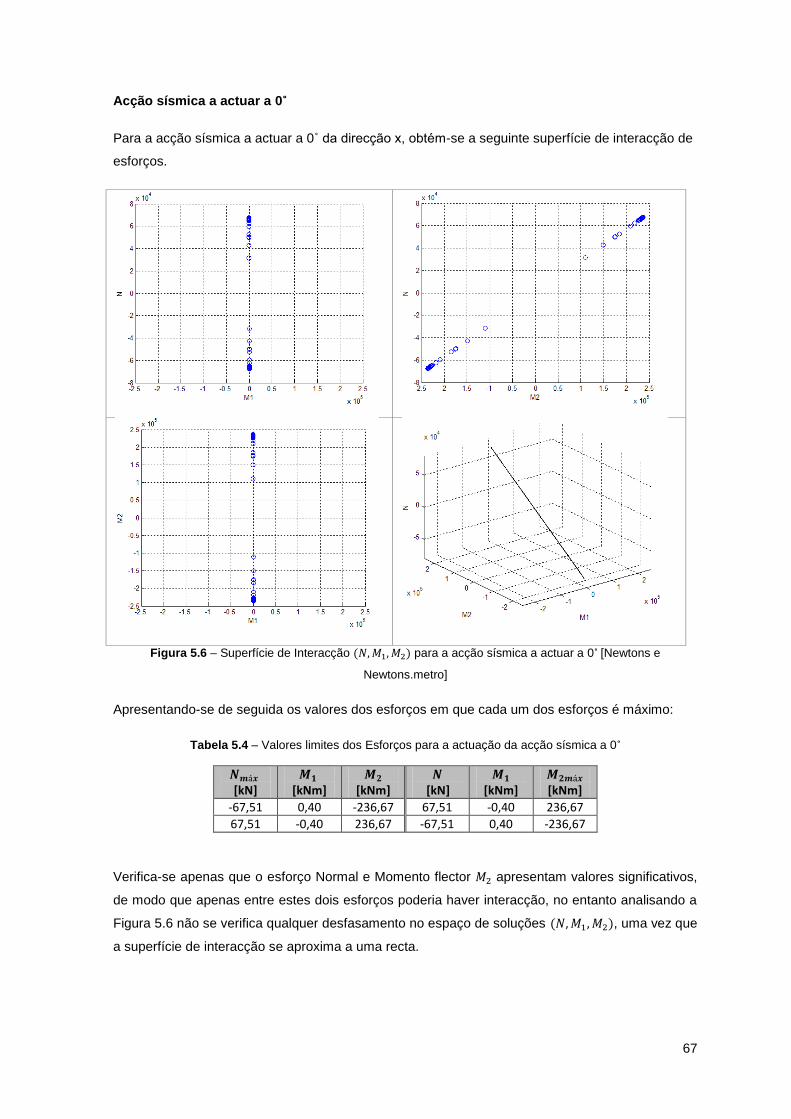
67
Acção sísmica a actuar a 0˚
Para a acção sísmica a actuar a 0˚ da direcção x, obtém-se a seguinte superfície de interacção de
esforços.
Figura 5.6 – Superfície de Interacção para a acção sísmica a actuar a 0˚ [Newtons e
Newtons.metro]
Apresentando-se de seguida os valores dos esforços em que cada um dos esforços é máximo:
Tabela 5.4 – Valores limites dos Esforços para a actuação da acção sísmica a 0˚
[kN]
[kNm]
[kNm]
[kN]
[kNm] [kNm]
-67,51 0,40 -236,67 67,51 -0,40 236,67
67,51 -0,40 236,67 -67,51 0,40 -236,67
Verifica-se apenas que o esforço Normal e Momento flector apresentam valores significativos,
de modo que apenas entre estes dois esforços poderia haver interacção, no entanto analisando a
Figura 5.6 não se verifica qualquer desfasamento no espaço de soluções , uma vez que
a superfície de interacção se aproxima a uma recta.
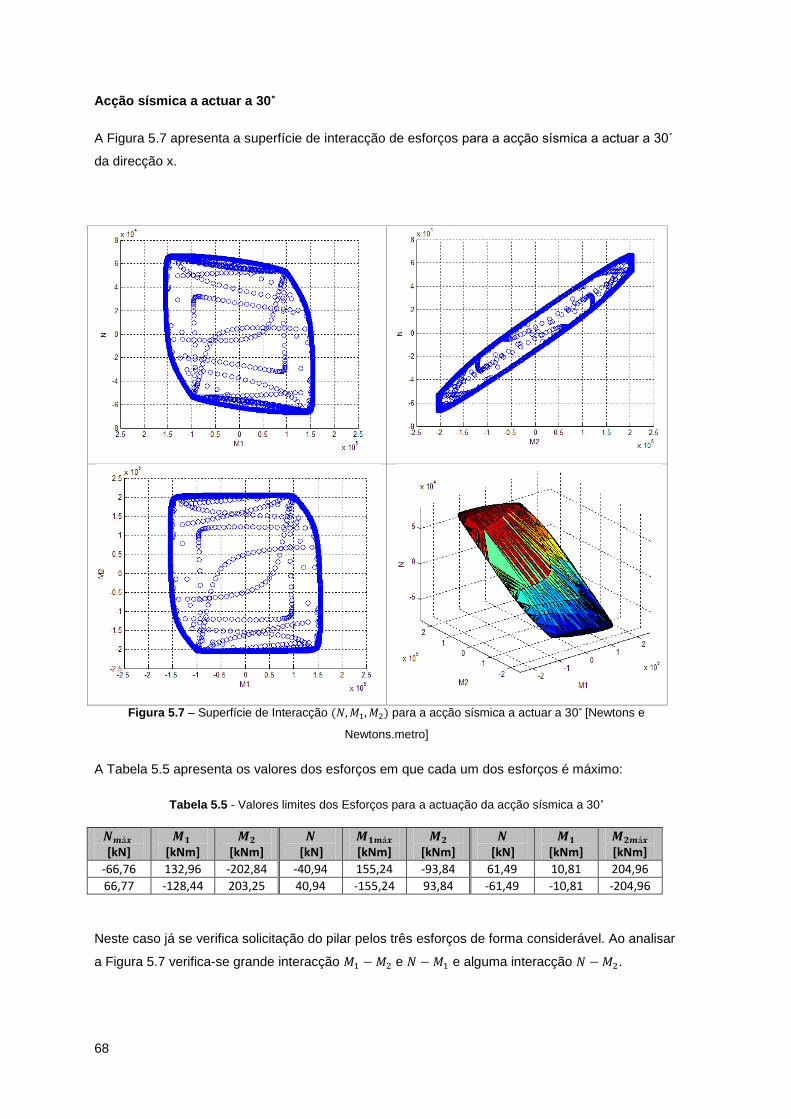
68
Acção sísmica a actuar a 30˚
A Figura 5.7 apresenta a superfície de interacção de esforços para a acção sísmica a actuar a 30˚
da direcção x.
Figura 5.7 – Superfície de Interacção para a acção sísmica a actuar a 30˚ [Newtons e
Newtons.metro]
A Tabela 5.5 apresenta os valores dos esforços em que cada um dos esforços é máximo:
Tabela 5.5 - Valores limites dos Esforços para a actuação da acção sísmica a 30˚
[kN]
[kNm]
[kNm]
[kN] [kNm]
[kNm]
[kN]
[kNm] [kNm]
-66,76 132,96 -202,84 -40,94 155,24 -93,84 61,49 10,81 204,96
66,77 -128,44 203,25 40,94 -155,24 93,84 -61,49 -10,81 -204,96
Neste caso já se verifica solicitação do pilar pelos três esforços de forma considerável. Ao analisar
a Figura 5.7 verifica-se grande interacção e e alguma interacção .
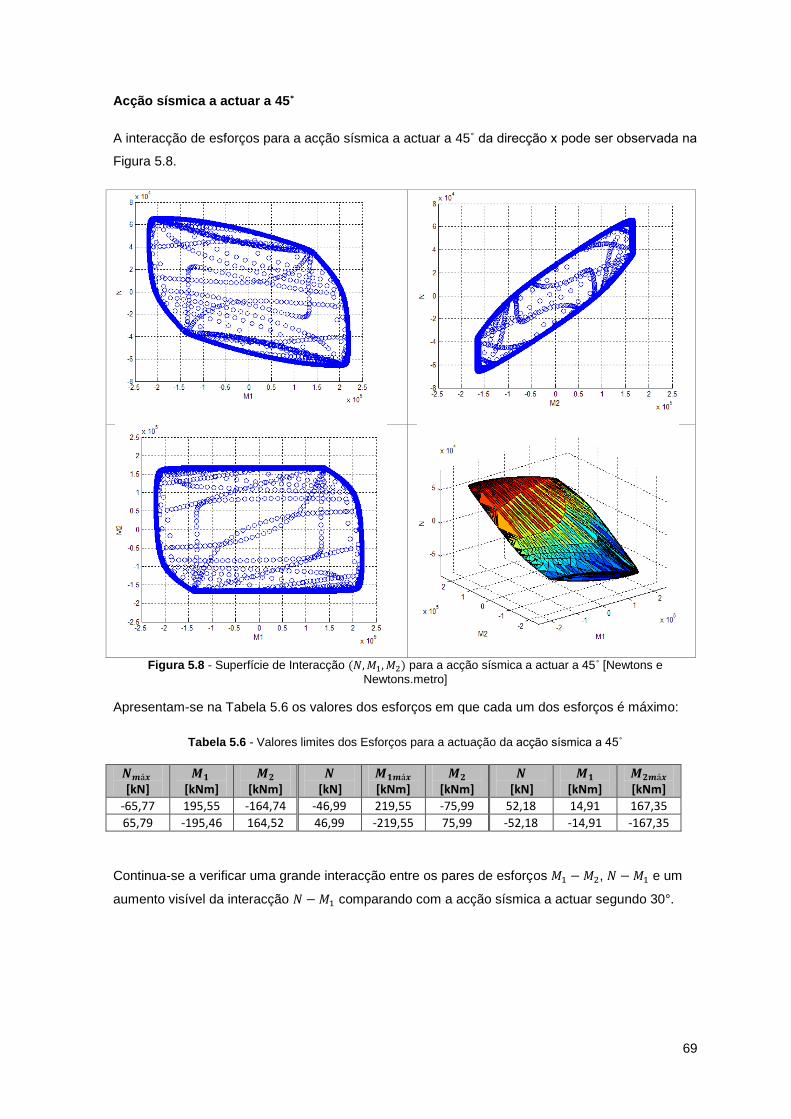
69
Acção sísmica a actuar a 45˚
A interacção de esforços para a acção sísmica a actuar a 45˚ da direcção x pode ser observada na
Figura 5.8.
Figura 5.8 - Superfície de Interacção para a acção sísmica a actuar a 45˚ [Newtons e
Newtons.metro]
Apresentam-se na Tabela 5.6 os valores dos esforços em que cada um dos esforços é máximo:
Tabela 5.6 - Valores limites dos Esforços para a actuação da acção sísmica a 45˚
[kN]
[kNm]
[kNm]
[kN] [kNm]
[kNm]
[kN]
[kNm] [kNm]
-65,77 195,55 -164,74 -46,99 219,55 -75,99 52,18 14,91 167,35
65,79 -195,46 164,52 46,99 -219,55 75,99 -52,18 -14,91 -167,35
Continua-se a verificar uma grande interacção entre os pares de esforços , e um
aumento visível da interacção comparando com a acção sísmica a actuar segundo 30°.
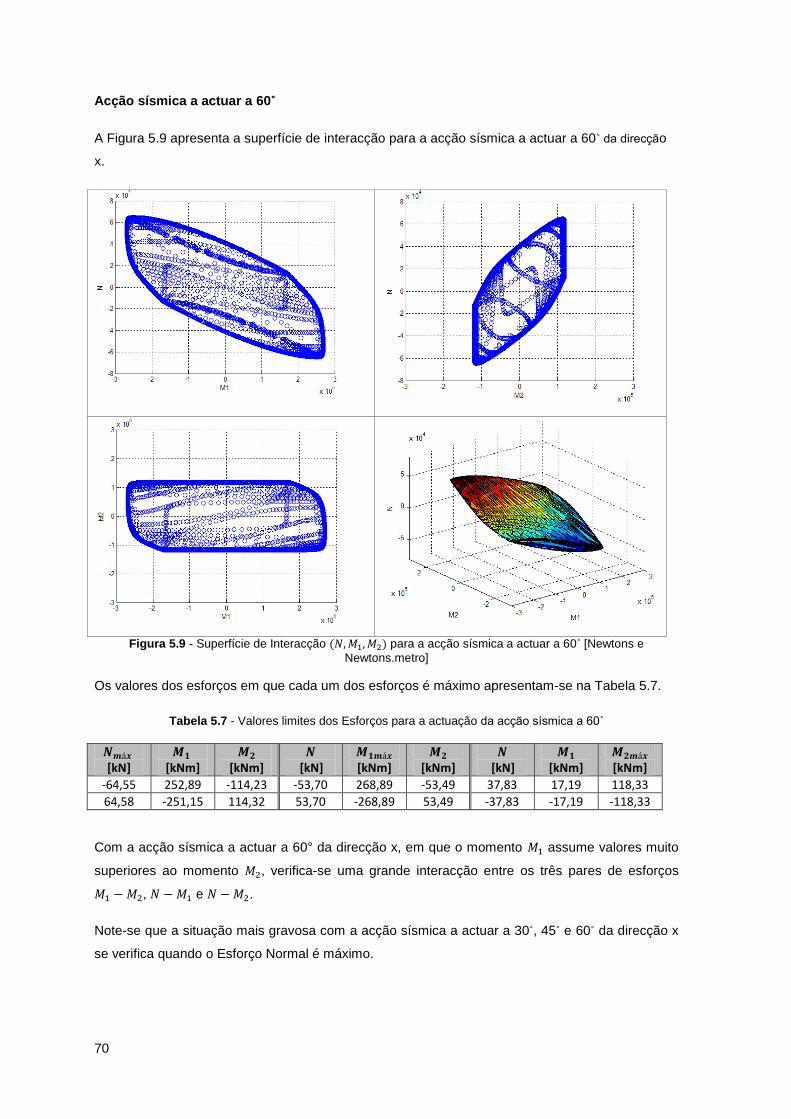
70
Acção sísmica a actuar a 60˚
A Figura 5.9 apresenta a superfície de interacção para a acção sísmica a actuar a 60˚ da direcção
x.
Figura 5.9 - Superfície de Interacção para a acção sísmica a actuar a 60˚ [Newtons e
Newtons.metro]
Os valores dos esforços em que cada um dos esforços é máximo apresentam-se na Tabela 5.7.
Tabela 5.7 - Valores limites dos Esforços para a actuação da acção sísmica a 60˚
[kN]
[kNm]
[kNm]
[kN] [kNm]
[kNm]
[kN]
[kNm] [kNm]
-64,55 252,89 -114,23 -53,70 268,89 -53,49 37,83 17,19 118,33
64,58 -251,15 114,32 53,70 -268,89 53,49 -37,83 -17,19 -118,33
Com a acção sísmica a actuar a 60° da direcção x, em que o momento assume valores muito
superiores ao momento , verifica-se uma grande interacção entre os três pares de esforços
, e .
Note-se que a situação mais gravosa com a acção sísmica a actuar a 30˚, 45˚ e 60˚ da direcção x
se verifica quando o Esforço Normal é máximo.
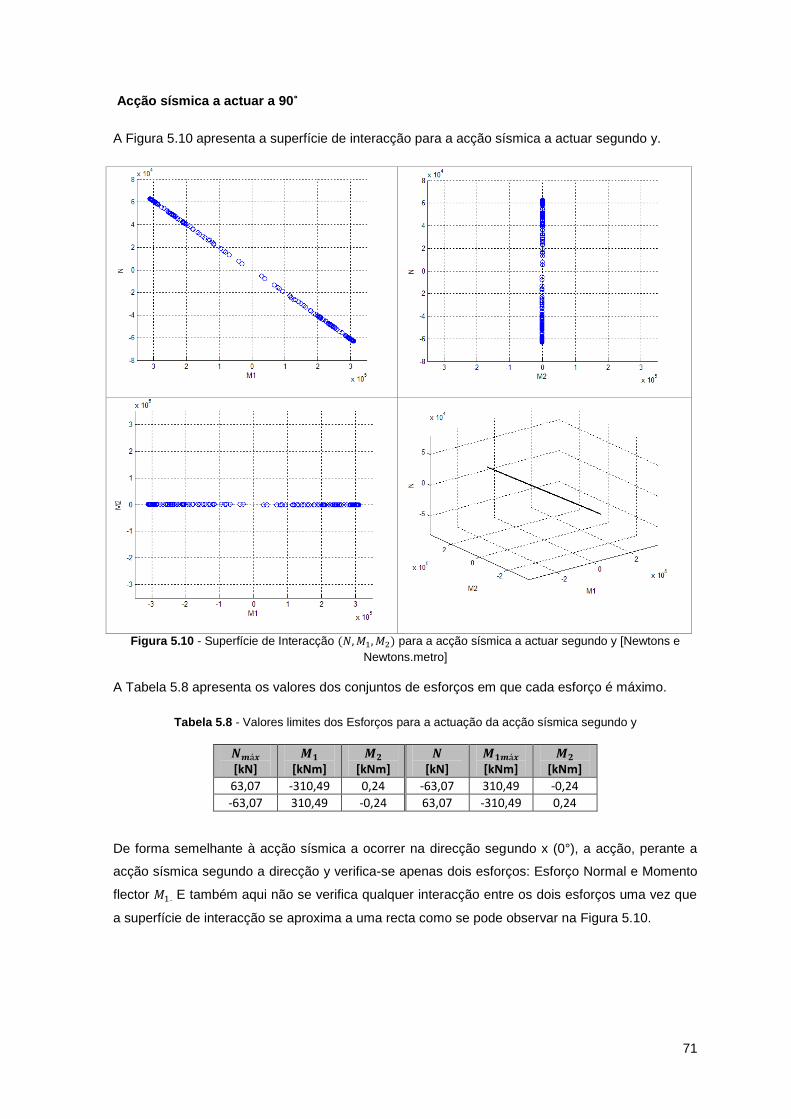
71
Acção sísmica a actuar a 90˚
A Figura 5.10 apresenta a superfície de interacção para a acção sísmica a actuar segundo y.
Figura 5.10 - Superfície de Interacção para a acção sísmica a actuar segundo y [Newtons e
Newtons.metro]
A Tabela 5.8 apresenta os valores dos conjuntos de esforços em que cada esforço é máximo.
Tabela 5.8 - Valores limites dos Esforços para a actuação da acção sísmica segundo y
[kN]
[kNm]
[kNm]
[kN] [kNm]
[kNm]
63,07 -310,49 0,24 -63,07 310,49 -0,24
-63,07 310,49 -0,24 63,07 -310,49 0,24
De forma semelhante à acção sísmica a ocorrer na direcção segundo x (0°), a acção, perante a
acção sísmica segundo a direcção y verifica-se apenas dois esforços: Esforço Normal e Momento
flector . E também aqui não se verifica qualquer interacção entre os dois esforços uma vez que
a superfície de interacção se aproxima a uma recta como se pode observar na Figura 5.10.
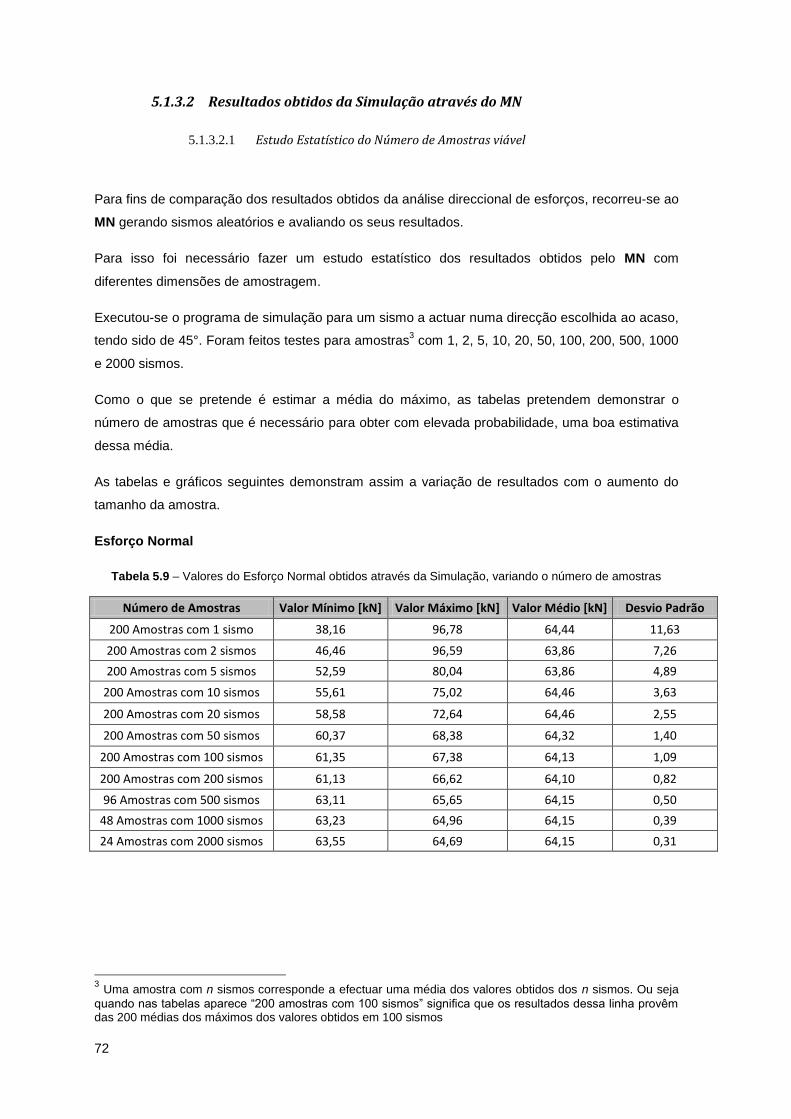
72
5.1.3.2 Resultados obtidos da Simulação através do MN
5.1.3.2.1 Estudo Estatístico do Número de Amostras viável
Para fins de comparação dos resultados obtidos da análise direccional de esforços, recorreu-se ao
MN gerando sismos aleatórios e avaliando os seus resultados.
Para isso foi necessário fazer um estudo estatístico dos resultados obtidos pelo MN com
diferentes dimensões de amostragem.
Executou-se o programa de simulação para um sismo a actuar numa direcção escolhida ao acaso,
tendo sido de 45°. Foram feitos testes para amostras3 com 1, 2, 5, 10, 20, 50, 100, 200, 500, 1000
e 2000 sismos.
Como o que se pretende é estimar a média do máximo, as tabelas pretendem demonstrar o
número de amostras que é necessário para obter com elevada probabilidade, uma boa estimativa
dessa média.
As tabelas e gráficos seguintes demonstram assim a variação de resultados com o aumento do
tamanho da amostra.
Esforço Normal
Tabela 5.9 – Valores do Esforço Normal obtidos através da Simulação, variando o número de amostras
Número de Amostras Valor Mínimo [kN] Valor Máximo [kN] Valor Médio [kN] Desvio Padrão
200 Amostras com 1 sismo 38,16 96,78 64,44 11,63
200 Amostras com 2 sismos 46,46 96,59 63,86 7,26
200 Amostras com 5 sismos 52,59 80,04 63,86 4,89
200 Amostras com 10 sismos 55,61 75,02 64,46 3,63
200 Amostras com 20 sismos 58,58 72,64 64,46 2,55
200 Amostras com 50 sismos 60,37 68,38 64,32 1,40
200 Amostras com 100 sismos 61,35 67,38 64,13 1,09
200 Amostras com 200 sismos 61,13 66,62 64,10 0,82
96 Amostras com 500 sismos 63,11 65,65 64,15 0,50
48 Amostras com 1000 sismos 63,23 64,96 64,15 0,39
24 Amostras com 2000 sismos 63,55 64,69 64,15 0,31
3 Uma amostra com n sismos corresponde a efectuar uma média dos valores obtidos dos n sismos. Ou seja
quando nas tabelas aparece “200 amostras com 100 sismos” significa que os resultados dessa linha provêm das 200 médias dos máximos dos valores obtidos em 100 sismos
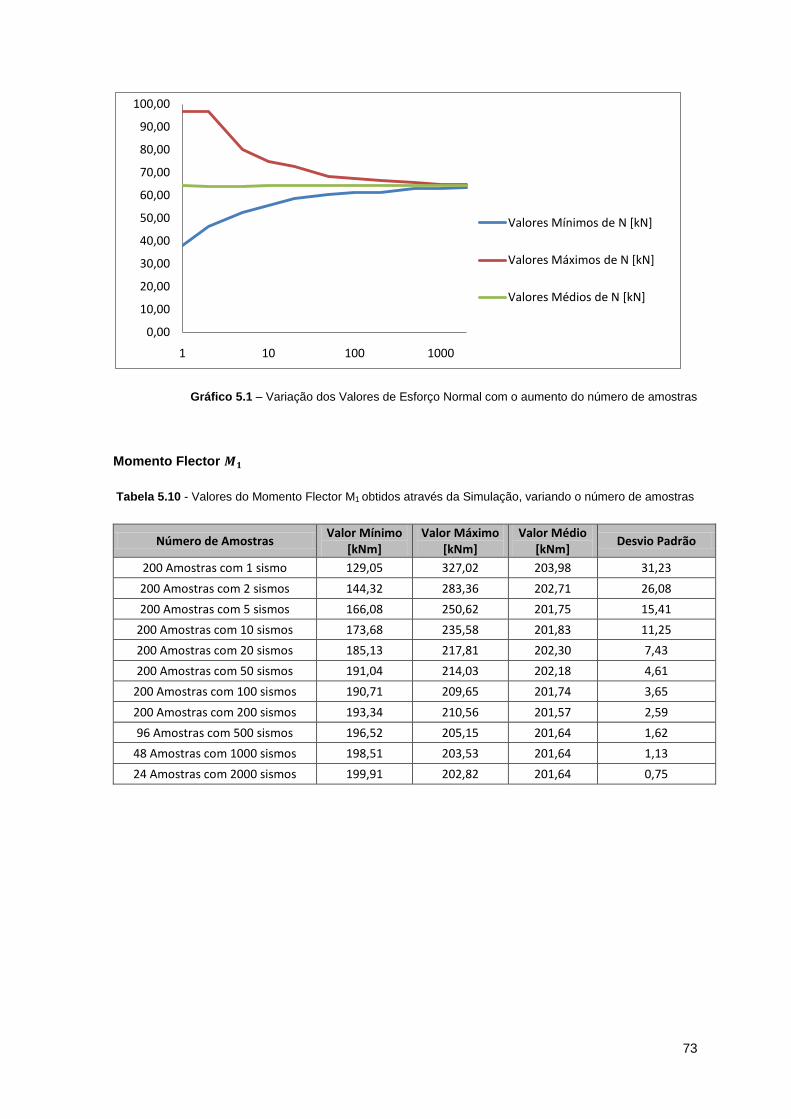
73
Gráfico 5.1 – Variação dos Valores de Esforço Normal com o aumento do número de amostras
Momento Flector
Tabela 5.10 - Valores do Momento Flector M1 obtidos através da Simulação, variando o número de amostras
Número de Amostras Valor Mínimo
[kNm] Valor Máximo
[kNm] Valor Médio
[kNm] Desvio Padrão
200 Amostras com 1 sismo 129,05 327,02 203,98 31,23
200 Amostras com 2 sismos 144,32 283,36 202,71 26,08
200 Amostras com 5 sismos 166,08 250,62 201,75 15,41
200 Amostras com 10 sismos 173,68 235,58 201,83 11,25
200 Amostras com 20 sismos 185,13 217,81 202,30 7,43
200 Amostras com 50 sismos 191,04 214,03 202,18 4,61
200 Amostras com 100 sismos 190,71 209,65 201,74 3,65
200 Amostras com 200 sismos 193,34 210,56 201,57 2,59
96 Amostras com 500 sismos 196,52 205,15 201,64 1,62
48 Amostras com 1000 sismos 198,51 203,53 201,64 1,13
24 Amostras com 2000 sismos 199,91 202,82 201,64 0,75
0,00
10,00
20,00
30,00
40,00
50,00
60,00
70,00
80,00
90,00
100,00
1 10 100 1000
Valores Mínimos de N [kN]
Valores Máximos de N [kN]
Valores Médios de N [kN]
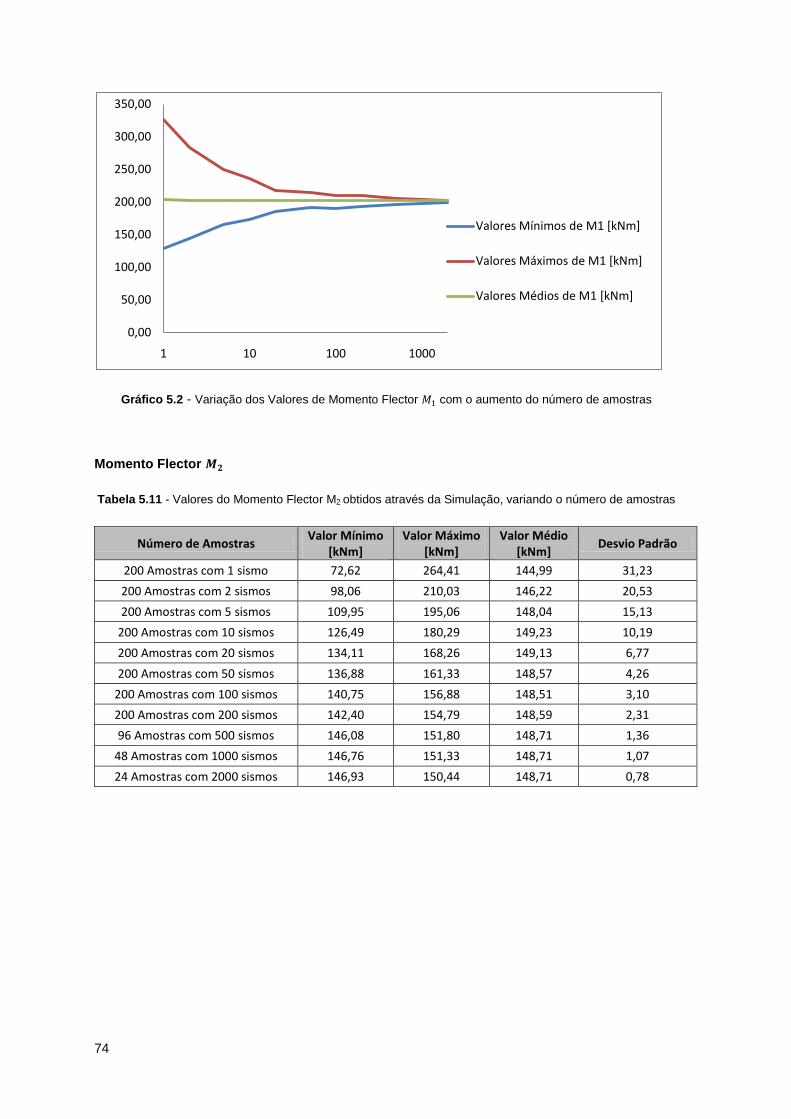
74
Gráfico 5.2 - Variação dos Valores de Momento Flector com o aumento do número de amostras
Momento Flector
Tabela 5.11 - Valores do Momento Flector M2 obtidos através da Simulação, variando o número de amostras
Número de Amostras Valor Mínimo
[kNm] Valor Máximo
[kNm] Valor Médio
[kNm] Desvio Padrão
200 Amostras com 1 sismo 72,62 264,41 144,99 31,23
200 Amostras com 2 sismos 98,06 210,03 146,22 20,53
200 Amostras com 5 sismos 109,95 195,06 148,04 15,13
200 Amostras com 10 sismos 126,49 180,29 149,23 10,19
200 Amostras com 20 sismos 134,11 168,26 149,13 6,77
200 Amostras com 50 sismos 136,88 161,33 148,57 4,26
200 Amostras com 100 sismos 140,75 156,88 148,51 3,10
200 Amostras com 200 sismos 142,40 154,79 148,59 2,31
96 Amostras com 500 sismos 146,08 151,80 148,71 1,36
48 Amostras com 1000 sismos 146,76 151,33 148,71 1,07
24 Amostras com 2000 sismos 146,93 150,44 148,71 0,78
0,00
50,00
100,00
150,00
200,00
250,00
300,00
350,00
1 10 100 1000
Valores Mínimos de M1 [kNm]
Valores Máximos de M1 [kNm]
Valores Médios de M1 [kNm]
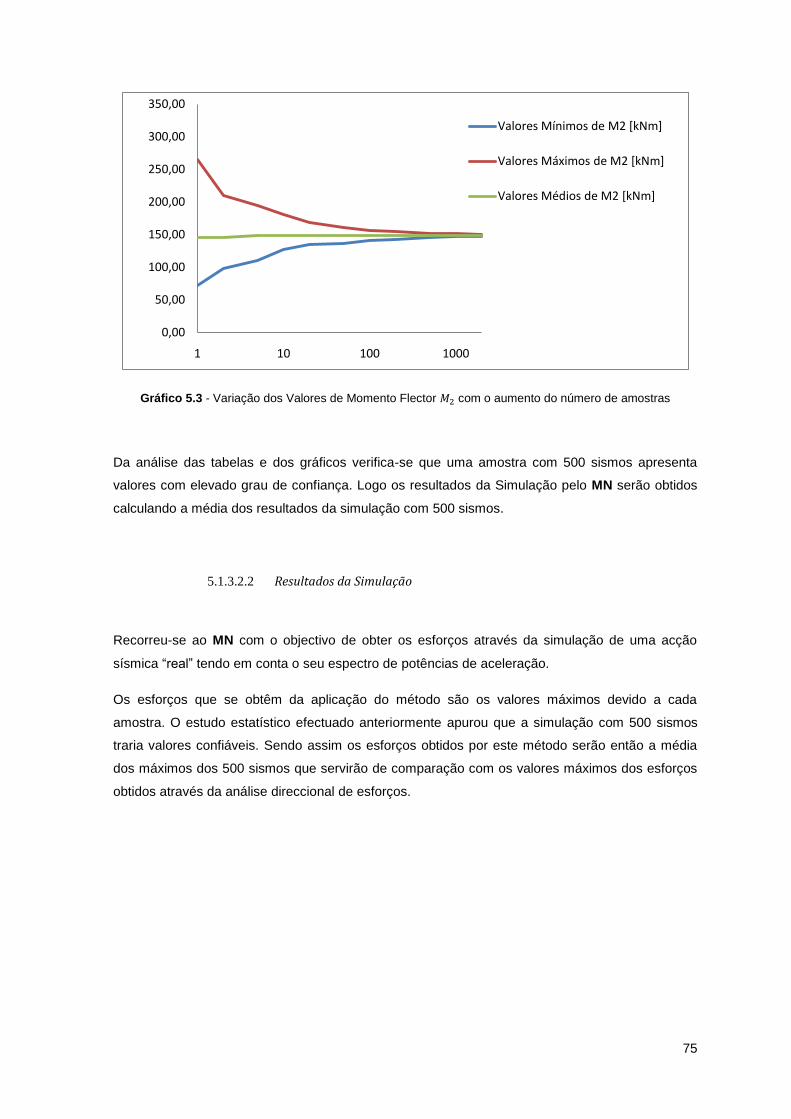
75
Gráfico 5.3 - Variação dos Valores de Momento Flector com o aumento do número de amostras
Da análise das tabelas e dos gráficos verifica-se que uma amostra com 500 sismos apresenta
valores com elevado grau de confiança. Logo os resultados da Simulação pelo MN serão obtidos
calculando a média dos resultados da simulação com 500 sismos.
5.1.3.2.2 Resultados da Simulação
Recorreu-se ao MN com o objectivo de obter os esforços através da simulação de uma acção
sísmica “real” tendo em conta o seu espectro de potências de aceleração.
Os esforços que se obtêm da aplicação do método são os valores máximos devido a cada
amostra. O estudo estatístico efectuado anteriormente apurou que a simulação com 500 sismos
traria valores confiáveis. Sendo assim os esforços obtidos por este método serão então a média
dos máximos dos 500 sismos que servirão de comparação com os valores máximos dos esforços
obtidos através da análise direccional de esforços.
0,00
50,00
100,00
150,00
200,00
250,00
300,00
350,00
1 10 100 1000
Valores Mínimos de M2 [kNm]
Valores Máximos de M2 [kNm]
Valores Médios de M2 [kNm]
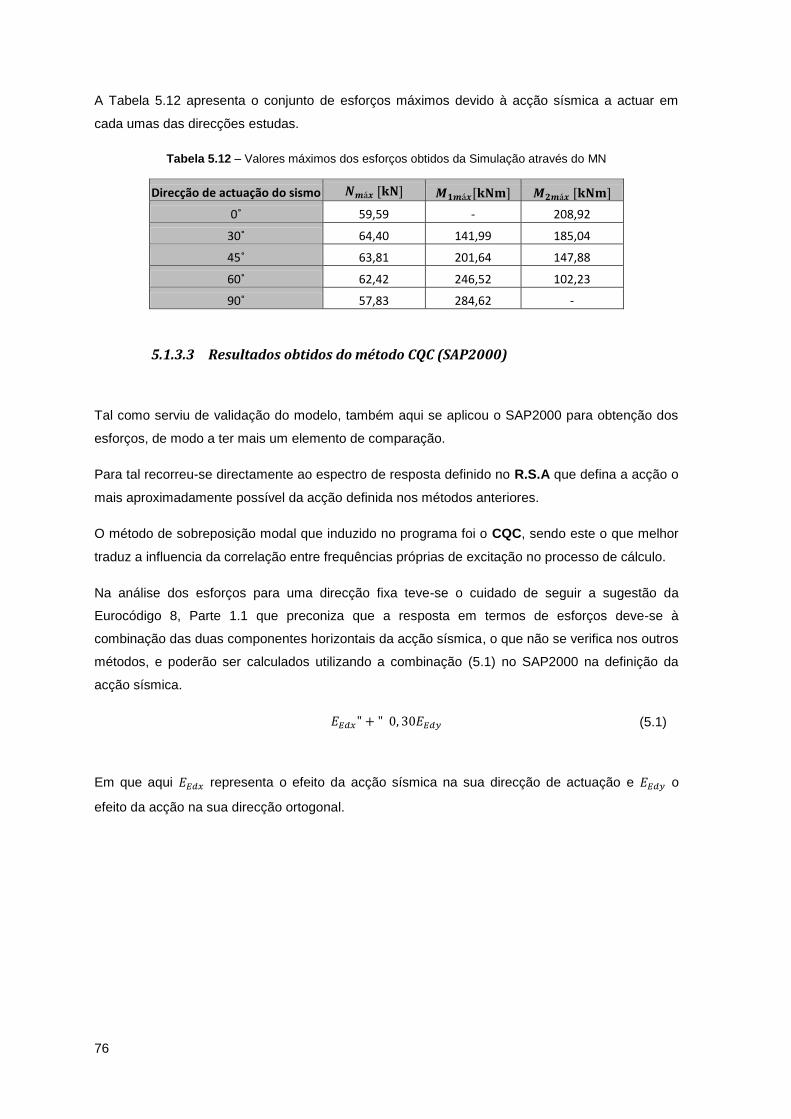
76
A Tabela 5.12 apresenta o conjunto de esforços máximos devido à acção sísmica a actuar em
cada umas das direcções estudas.
Tabela 5.12 – Valores máximos dos esforços obtidos da Simulação através do MN
Direcção de actuação do sismo
0˚ 59,59 - 208,92
30˚ 64,40 141,99 185,04
45˚ 63,81 201,64 147,88
60˚ 62,42 246,52 102,23
90˚ 57,83 284,62 -
5.1.3.3 Resultados obtidos do método CQC (SAP2000)
Tal como serviu de validação do modelo, também aqui se aplicou o SAP2000 para obtenção dos
esforços, de modo a ter mais um elemento de comparação.
Para tal recorreu-se directamente ao espectro de resposta definido no R.S.A que defina a acção o
mais aproximadamente possível da acção definida nos métodos anteriores.
O método de sobreposição modal que induzido no programa foi o CQC, sendo este o que melhor
traduz a influencia da correlação entre frequências próprias de excitação no processo de cálculo.
Na análise dos esforços para uma direcção fixa teve-se o cuidado de seguir a sugestão da
Eurocódigo 8, Parte 1.1 que preconiza que a resposta em termos de esforços deve-se à
combinação das duas componentes horizontais da acção sísmica, o que não se verifica nos outros
métodos, e poderão ser calculados utilizando a combinação (5.1) no SAP2000 na definição da
acção sísmica.
(5.1)
Em que aqui representa o efeito da acção sísmica na sua direcção de actuação e o
efeito da acção na sua direcção ortogonal.
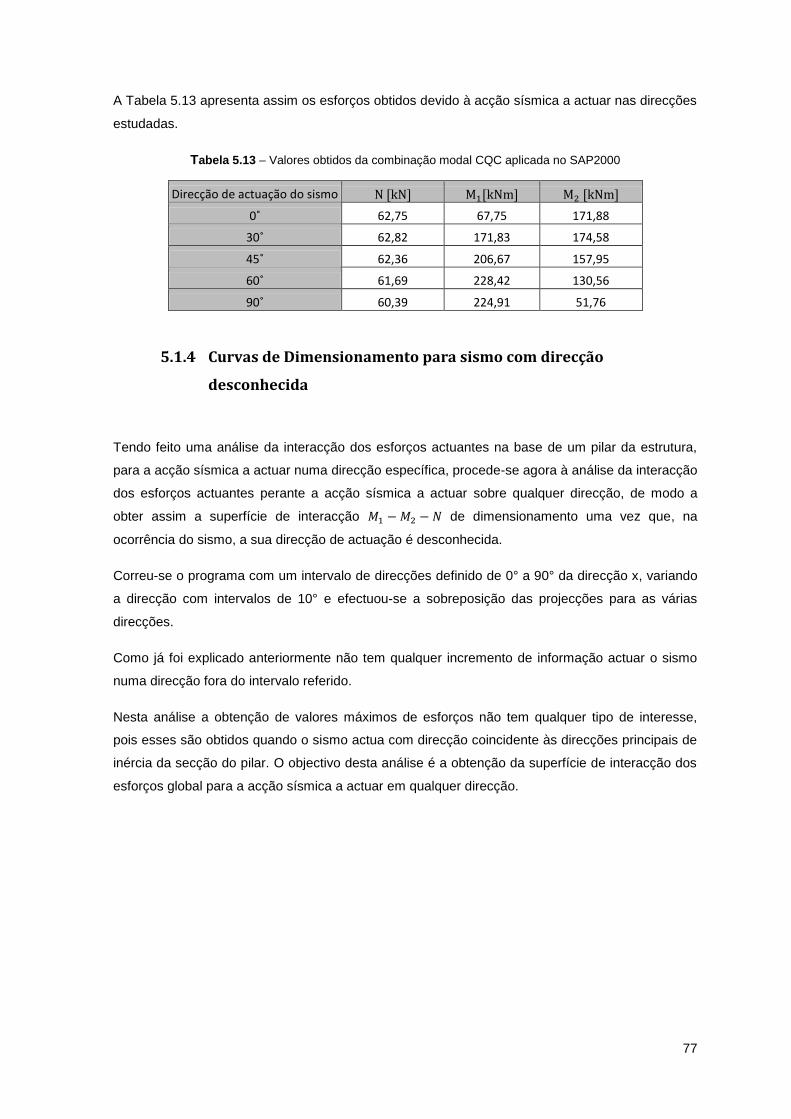
77
A Tabela 5.13 apresenta assim os esforços obtidos devido à acção sísmica a actuar nas direcções
estudadas.
Tabela 5.13 – Valores obtidos da combinação modal CQC aplicada no SAP2000
Direcção de actuação do sismo
0˚ 62,75 67,75 171,88
30˚ 62,82 171,83 174,58
45˚ 62,36 206,67 157,95
60˚ 61,69 228,42 130,56
90˚ 60,39 224,91 51,76
5.1.4 Curvas de Dimensionamento para sismo com direcção
desconhecida
Tendo feito uma análise da interacção dos esforços actuantes na base de um pilar da estrutura,
para a acção sísmica a actuar numa direcção específica, procede-se agora à análise da interacção
dos esforços actuantes perante a acção sísmica a actuar sobre qualquer direcção, de modo a
obter assim a superfície de interacção de dimensionamento uma vez que, na
ocorrência do sismo, a sua direcção de actuação é desconhecida.
Correu-se o programa com um intervalo de direcções definido de 0° a 90° da direcção x, variando
a direcção com intervalos de 10° e efectuou-se a sobreposição das projecções para as várias
direcções.
Como já foi explicado anteriormente não tem qualquer incremento de informação actuar o sismo
numa direcção fora do intervalo referido.
Nesta análise a obtenção de valores máximos de esforços não tem qualquer tipo de interesse,
pois esses são obtidos quando o sismo actua com direcção coincidente às direcções principais de
inércia da secção do pilar. O objectivo desta análise é a obtenção da superfície de interacção dos
esforços global para a acção sísmica a actuar em qualquer direcção.
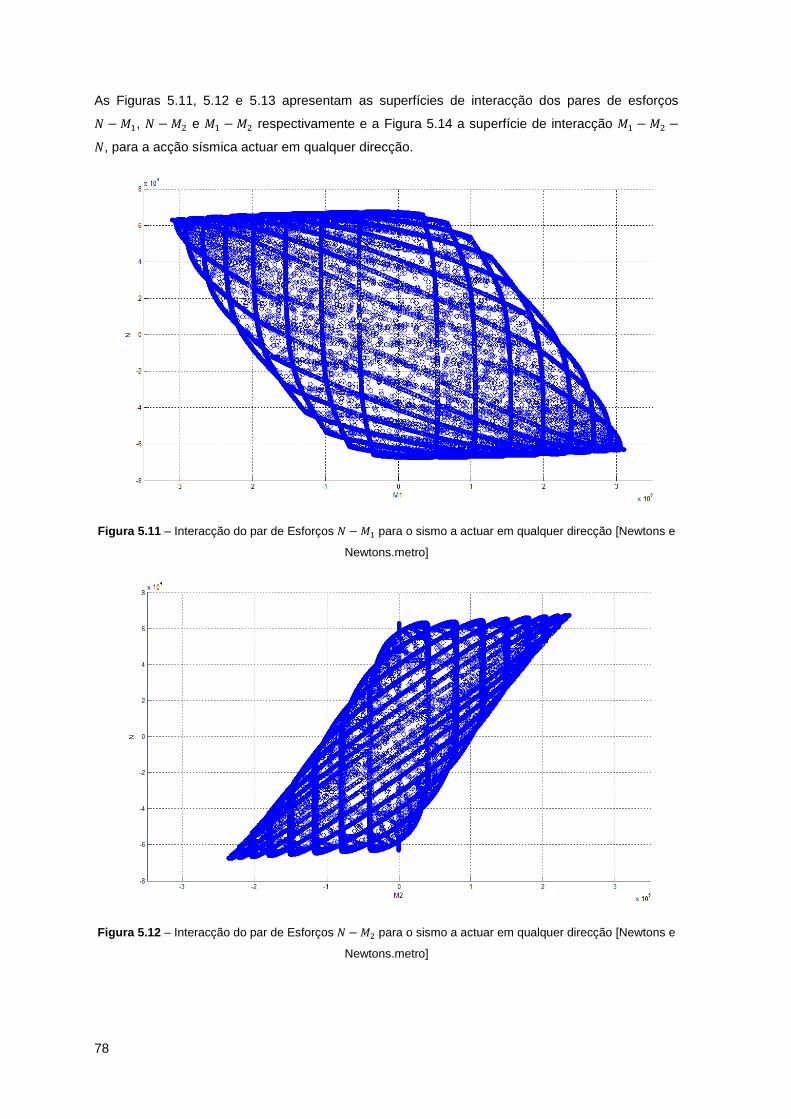
78
As Figuras 5.11, 5.12 e 5.13 apresentam as superfícies de interacção dos pares de esforços
, e respectivamente e a Figura 5.14 a superfície de interacção
, para a acção sísmica actuar em qualquer direcção.
Figura 5.11 – Interacção do par de Esforços para o sismo a actuar em qualquer direcção [Newtons e
Newtons.metro]
Figura 5.12 – Interacção do par de Esforços para o sismo a actuar em qualquer direcção [Newtons e
Newtons.metro]
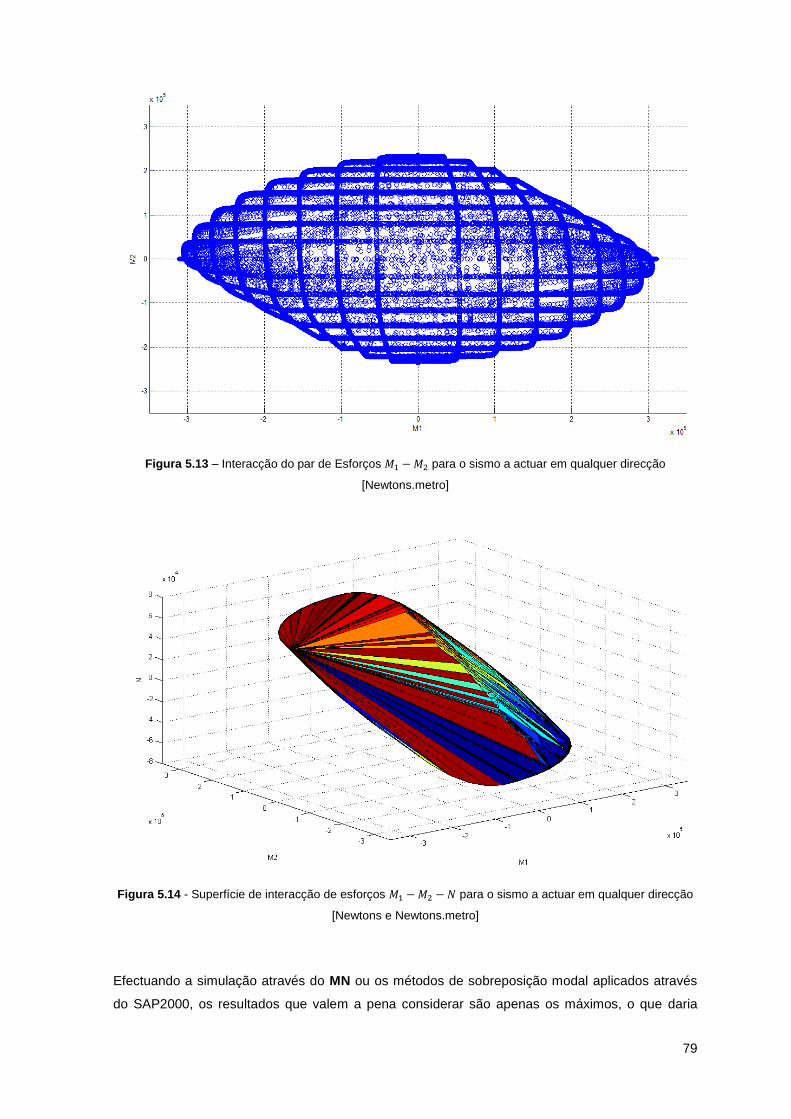
79
Figura 5.13 – Interacção do par de Esforços para o sismo a actuar em qualquer direcção
[Newtons.metro]
Figura 5.14 - Superfície de interacção de esforços para o sismo a actuar em qualquer direcção
[Newtons e Newtons.metro]
Efectuando a simulação através do MN ou os métodos de sobreposição modal aplicados através
do SAP2000, os resultados que valem a pena considerar são apenas os máximos, o que daria
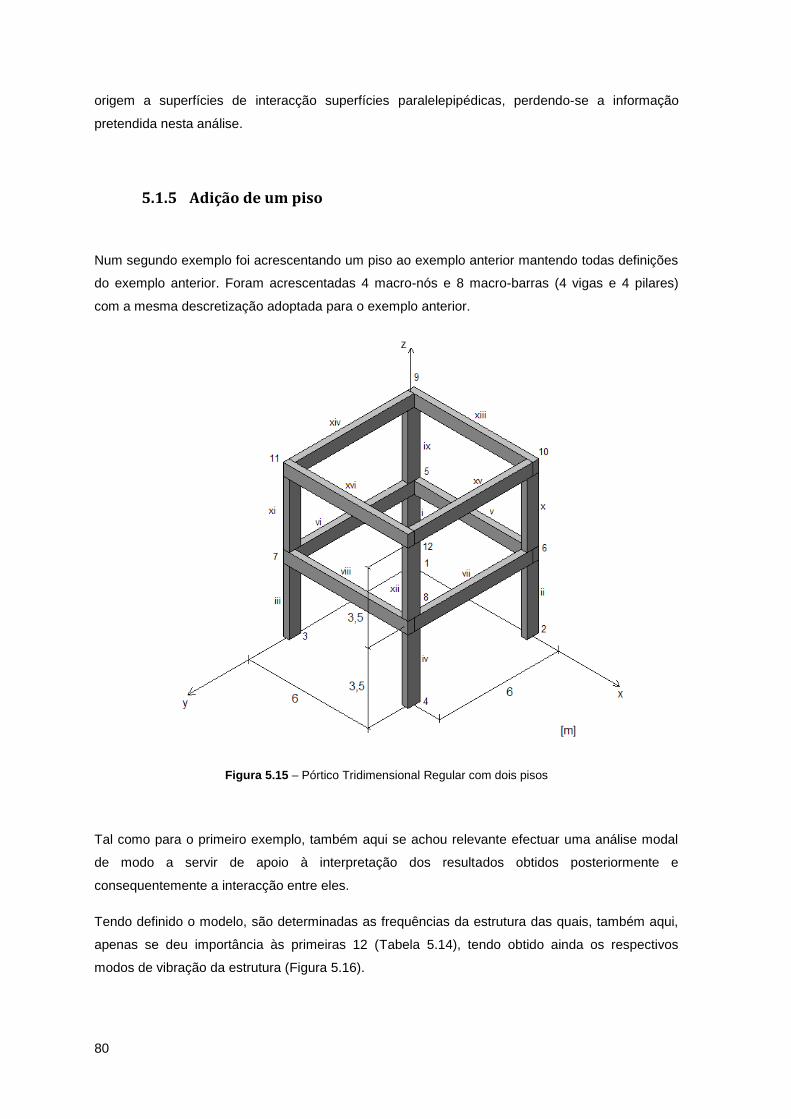
80
origem a superfícies de interacção superfícies paralelepipédicas, perdendo-se a informação
pretendida nesta análise.
5.1.5 Adição de um piso
Num segundo exemplo foi acrescentando um piso ao exemplo anterior mantendo todas definições
do exemplo anterior. Foram acrescentadas 4 macro-nós e 8 macro-barras (4 vigas e 4 pilares)
com a mesma descretização adoptada para o exemplo anterior.
Figura 5.15 – Pórtico Tridimensional Regular com dois pisos
Tal como para o primeiro exemplo, também aqui se achou relevante efectuar uma análise modal
de modo a servir de apoio à interpretação dos resultados obtidos posteriormente e
consequentemente a interacção entre eles.
Tendo definido o modelo, são determinadas as frequências da estrutura das quais, também aqui,
apenas se deu importância às primeiras 12 (Tabela 5.14), tendo obtido ainda os respectivos
modos de vibração da estrutura (Figura 5.16).
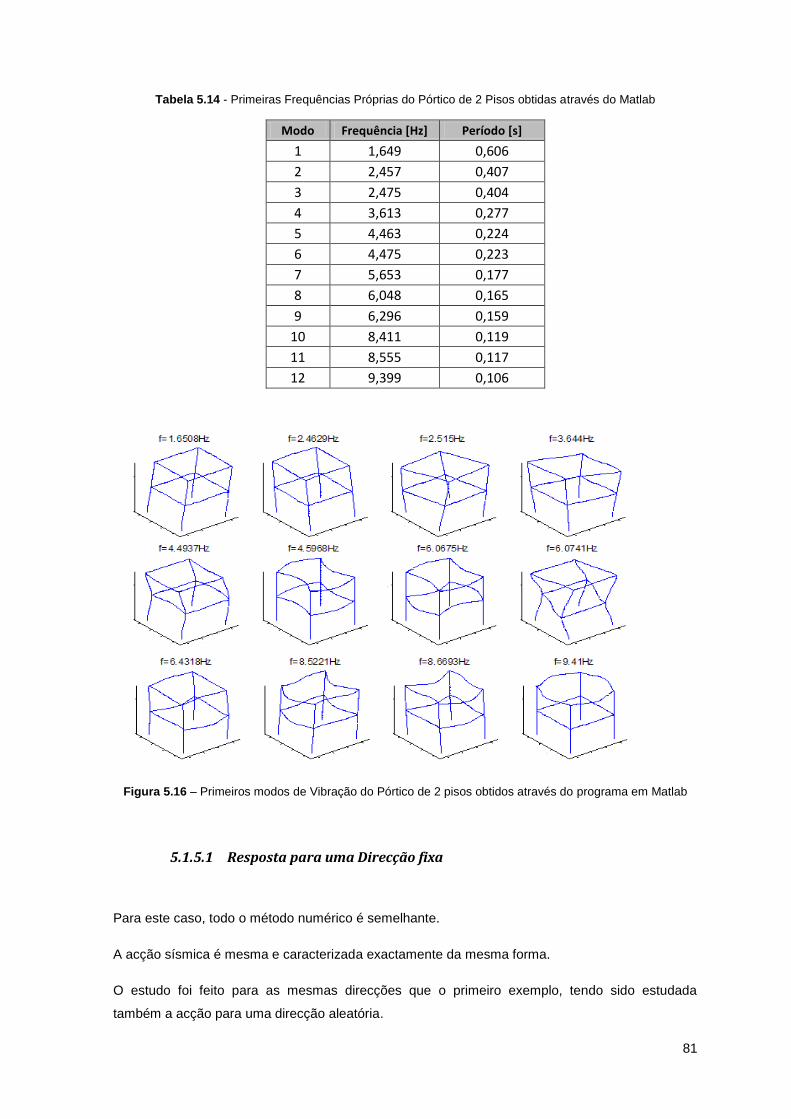
81
Tabela 5.14 - Primeiras Frequências Próprias do Pórtico de 2 Pisos obtidas através do Matlab
Modo Frequência [Hz] Período [s]
1 1,649 0,606
2 2,457 0,407
3 2,475 0,404
4 3,613 0,277
5 4,463 0,224
6 4,475 0,223
7 5,653 0,177
8 6,048 0,165
9 6,296 0,159
10 8,411 0,119
11 8,555 0,117
12 9,399 0,106
Figura 5.16 – Primeiros modos de Vibração do Pórtico de 2 pisos obtidos através do programa em Matlab
5.1.5.1 Resposta para uma Direcção fixa
Para este caso, todo o método numérico é semelhante.
A acção sísmica é mesma e caracterizada exactamente da mesma forma.
O estudo foi feito para as mesmas direcções que o primeiro exemplo, tendo sido estudada
também a acção para uma direcção aleatória.
82
A secção da qual são obtidos os esforços também se mantém.
A determinação do valor esperado dos esforços da secção em causa, foi efectuada exactamente
da mesma forma.
Posteriormente a isto, determina-se o valor máximo esperado das funções de densidade espectral
dos três esforços em questão, reunindo as condições para obter as superfícies de interacção
.
Também a sua determinação é feita de forma análoga ao que foi feito para o primeiro exemplo,
mantendo as mesmas direcções no espaço assim como a combinação das várias
superfícies de modo a obter a superfície de interacção de dimensionamento.
Tendo agora definido desta feita um pórtico de dois pisos com características semelhantes ao
caso anterior, efectuou-se o estudo dos esforços para as direcções de actuação da acção sísmica
estudadas para o primeiro exemplo 0˚, 30˚, 45˚, 60˚ e 90˚.
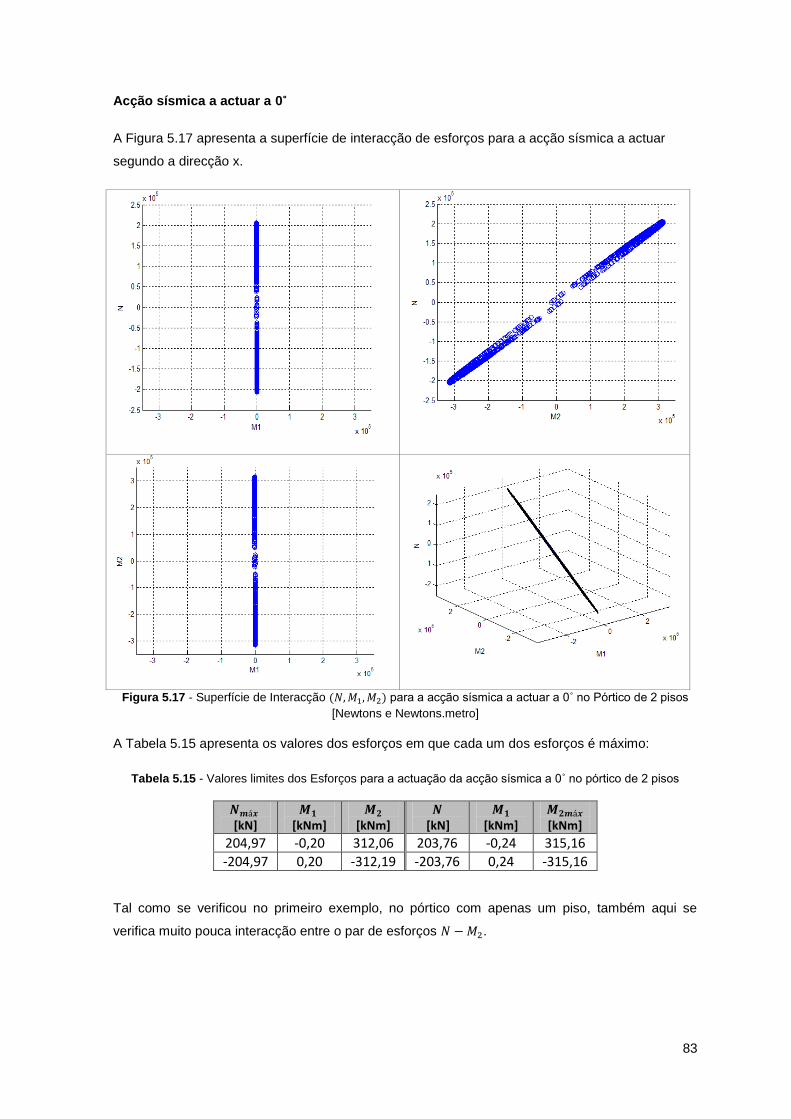
83
Acção sísmica a actuar a 0˚
A Figura 5.17 apresenta a superfície de interacção de esforços para a acção sísmica a actuar
segundo a direcção x.
Figura 5.17 - Superfície de Interacção para a acção sísmica a actuar a 0˚ no Pórtico de 2 pisos
[Newtons e Newtons.metro]
A Tabela 5.15 apresenta os valores dos esforços em que cada um dos esforços é máximo:
Tabela 5.15 - Valores limites dos Esforços para a actuação da acção sísmica a 0˚ no pórtico de 2 pisos
[kN]
[kNm]
[kNm]
[kN]
[kNm] [kNm]
204,97 -0,20 312,06 203,76 -0,24 315,16
-204,97 0,20 -312,19 -203,76 0,24 -315,16
Tal como se verificou no primeiro exemplo, no pórtico com apenas um piso, também aqui se
verifica muito pouca interacção entre o par de esforços .
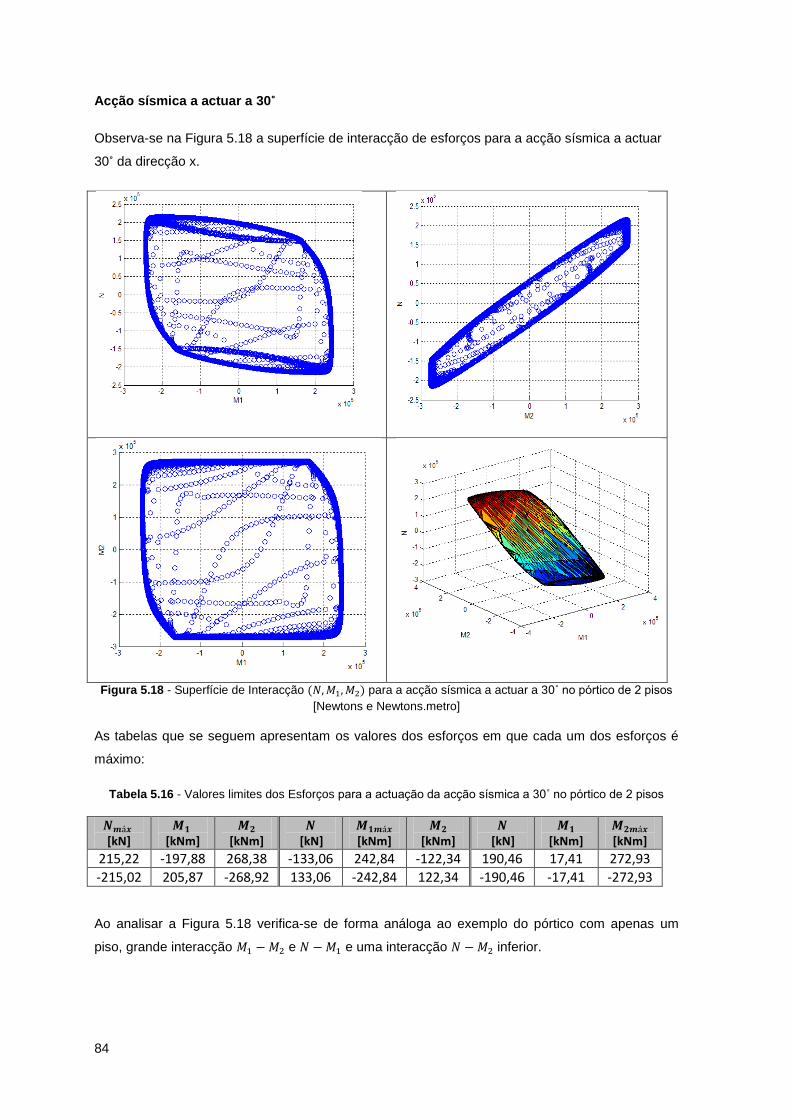
84
Acção sísmica a actuar a 30˚
Observa-se na Figura 5.18 a superfície de interacção de esforços para a acção sísmica a actuar
30˚ da direcção x.
Figura 5.18 - Superfície de Interacção para a acção sísmica a actuar a 30˚ no pórtico de 2 pisos
[Newtons e Newtons.metro]
As tabelas que se seguem apresentam os valores dos esforços em que cada um dos esforços é
máximo:
Tabela 5.16 - Valores limites dos Esforços para a actuação da acção sísmica a 30˚ no pórtico de 2 pisos
[kN]
[kNm]
[kNm]
[kN] [kNm]
[kNm]
[kN]
[kNm] [kNm]
215,22 -197,88 268,38 -133,06 242,84 -122,34 190,46 17,41 272,93
-215,02 205,87 -268,92 133,06 -242,84 122,34 -190,46 -17,41 -272,93
Ao analisar a Figura 5.18 verifica-se de forma análoga ao exemplo do pórtico com apenas um
piso, grande interacção e e uma interacção inferior.
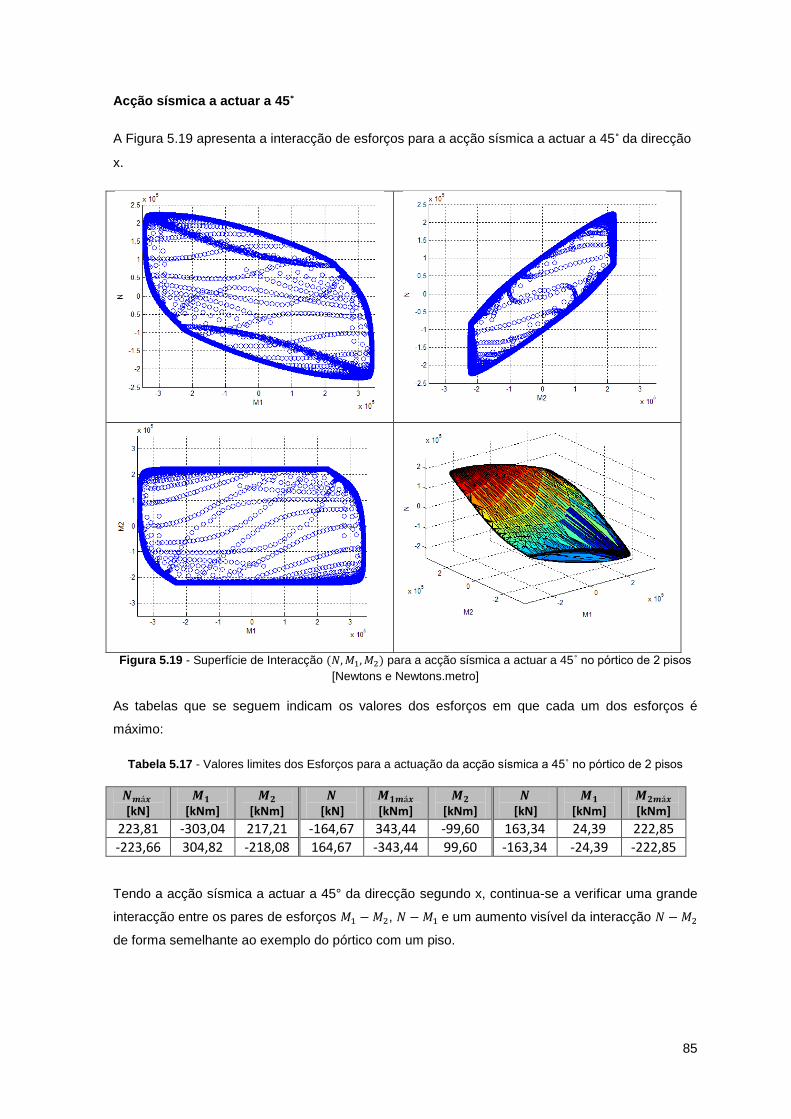
85
Acção sísmica a actuar a 45˚
A Figura 5.19 apresenta a interacção de esforços para a acção sísmica a actuar a 45˚ da direcção
x.
Figura 5.19 - Superfície de Interacção para a acção sísmica a actuar a 45˚ no pórtico de 2 pisos
[Newtons e Newtons.metro]
As tabelas que se seguem indicam os valores dos esforços em que cada um dos esforços é
máximo:
Tabela 5.17 - Valores limites dos Esforços para a actuação da acção sísmica a 45˚ no pórtico de 2 pisos
[kN]
[kNm]
[kNm]
[kN] [kNm]
[kNm]
[kN]
[kNm] [kNm]
223,81 -303,04 217,21 -164,67 343,44 -99,60 163,34 24,39 222,85
-223,66 304,82 -218,08 164,67 -343,44 99,60 -163,34 -24,39 -222,85
Tendo a acção sísmica a actuar a 45° da direcção segundo x, continua-se a verificar uma grande
interacção entre os pares de esforços , e um aumento visível da interacção
de forma semelhante ao exemplo do pórtico com um piso.
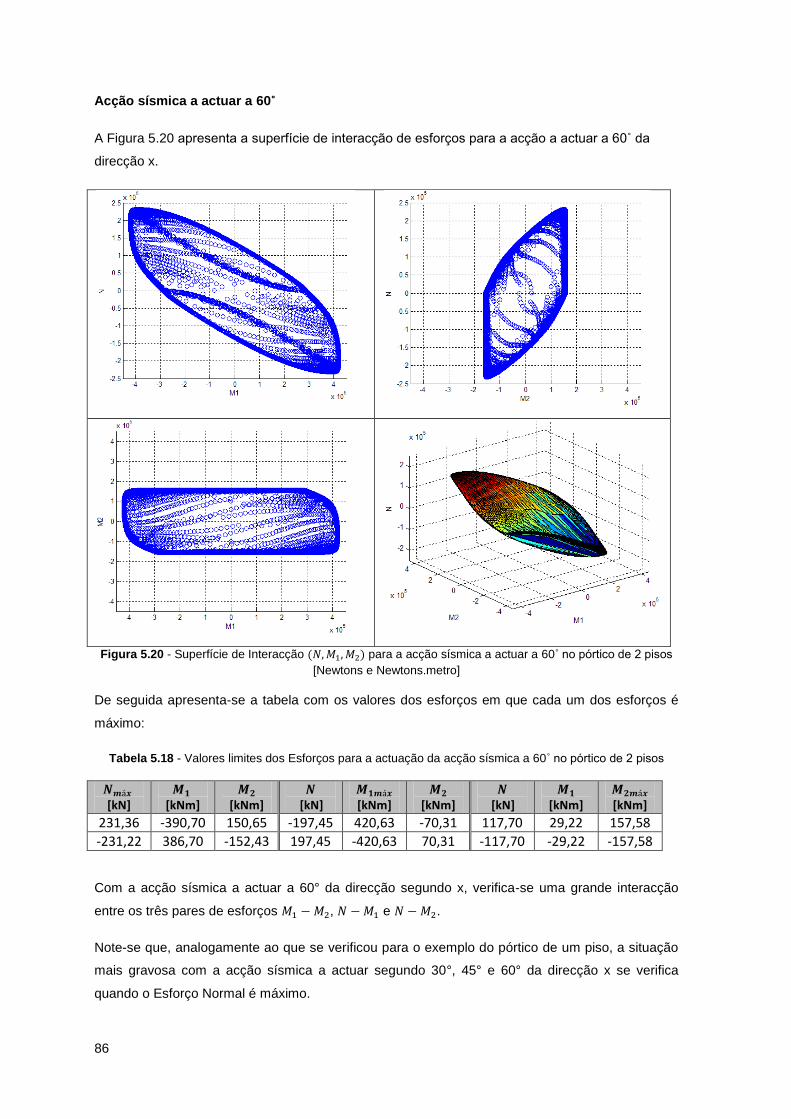
86
Acção sísmica a actuar a 60˚
A Figura 5.20 apresenta a superfície de interacção de esforços para a acção a actuar a 60˚ da
direcção x.
Figura 5.20 - Superfície de Interacção para a acção sísmica a actuar a 60˚ no pórtico de 2 pisos
[Newtons e Newtons.metro]
De seguida apresenta-se a tabela com os valores dos esforços em que cada um dos esforços é
máximo:
Tabela 5.18 - Valores limites dos Esforços para a actuação da acção sísmica a 60˚ no pórtico de 2 pisos
[kN]
[kNm]
[kNm]
[kN] [kNm]
[kNm]
[kN]
[kNm] [kNm]
231,36 -390,70 150,65 -197,45 420,63 -70,31 117,70 29,22 157,58
-231,22 386,70 -152,43 197,45 -420,63 70,31 -117,70 -29,22 -157,58
Com a acção sísmica a actuar a 60° da direcção segundo x, verifica-se uma grande interacção
entre os três pares de esforços , e .
Note-se que, analogamente ao que se verificou para o exemplo do pórtico de um piso, a situação
mais gravosa com a acção sísmica a actuar segundo 30°, 45° e 60° da direcção x se verifica
quando o Esforço Normal é máximo.
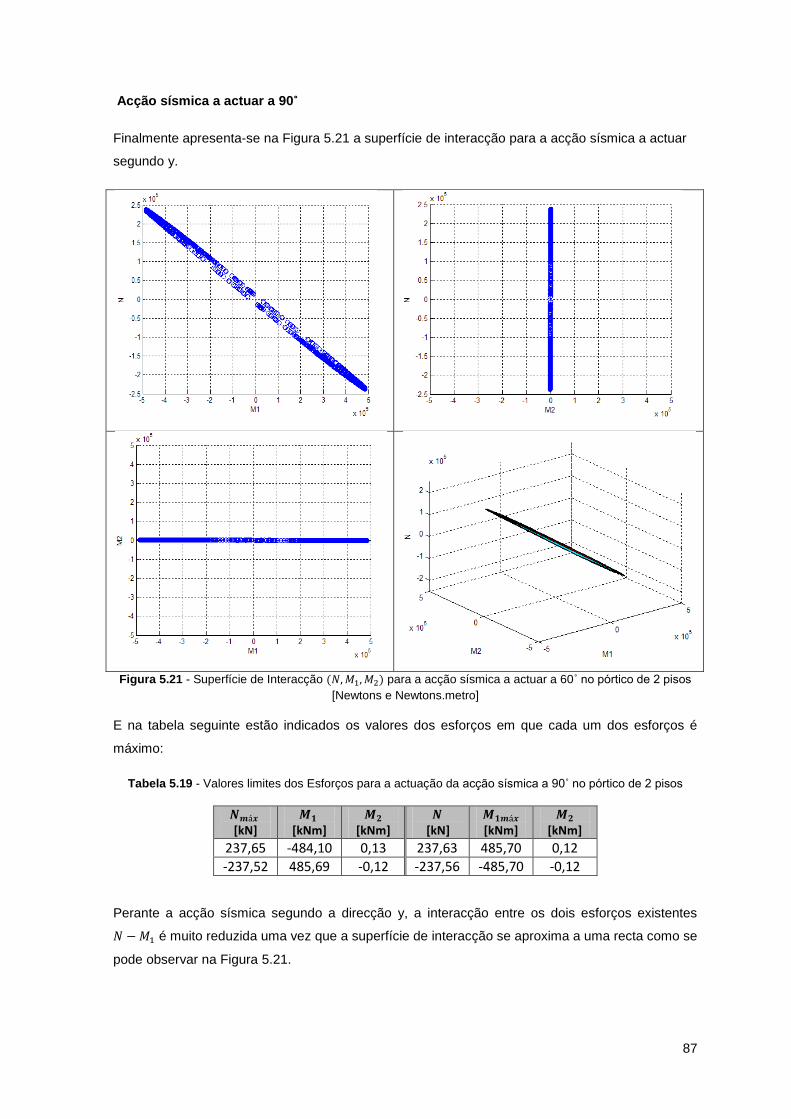
87
Acção sísmica a actuar a 90˚
Finalmente apresenta-se na Figura 5.21 a superfície de interacção para a acção sísmica a actuar
segundo y.
Figura 5.21 - Superfície de Interacção para a acção sísmica a actuar a 60˚ no pórtico de 2 pisos
[Newtons e Newtons.metro]
E na tabela seguinte estão indicados os valores dos esforços em que cada um dos esforços é
máximo:
Tabela 5.19 - Valores limites dos Esforços para a actuação da acção sísmica a 90˚ no pórtico de 2 pisos
[kN]
[kNm]
[kNm]
[kN] [kNm]
[kNm]
237,65 -484,10 0,13 237,63 485,70 0,12
-237,52 485,69 -0,12 -237,56 -485,70 -0,12
Perante a acção sísmica segundo a direcção y, a interacção entre os dois esforços existentes
é muito reduzida uma vez que a superfície de interacção se aproxima a uma recta como se
pode observar na Figura 5.21.
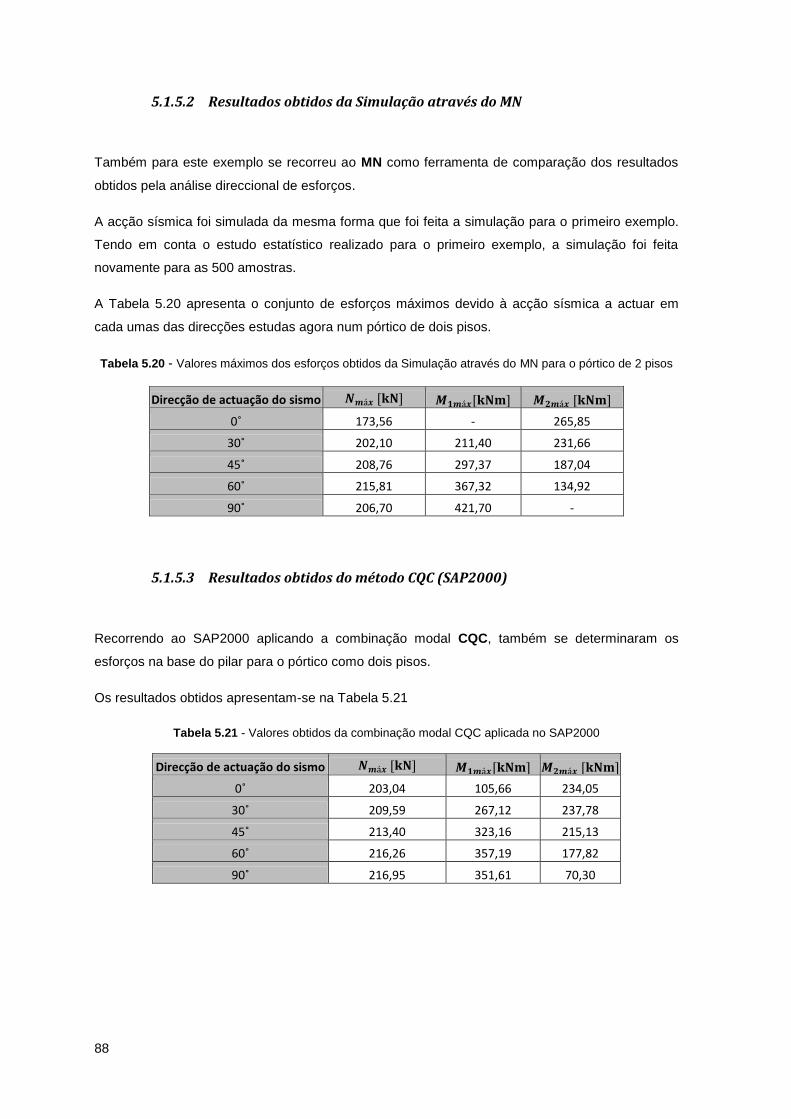
88
5.1.5.2 Resultados obtidos da Simulação através do MN
Também para este exemplo se recorreu ao MN como ferramenta de comparação dos resultados
obtidos pela análise direccional de esforços.
A acção sísmica foi simulada da mesma forma que foi feita a simulação para o primeiro exemplo.
Tendo em conta o estudo estatístico realizado para o primeiro exemplo, a simulação foi feita
novamente para as 500 amostras.
A Tabela 5.20 apresenta o conjunto de esforços máximos devido à acção sísmica a actuar em
cada umas das direcções estudas agora num pórtico de dois pisos.
Tabela 5.20 - Valores máximos dos esforços obtidos da Simulação através do MN para o pórtico de 2 pisos
Direcção de actuação do sismo
0˚ 173,56 - 265,85
30˚ 202,10 211,40 231,66
45˚ 208,76 297,37 187,04
60˚ 215,81 367,32 134,92
90˚ 206,70 421,70 -
5.1.5.3 Resultados obtidos do método CQC (SAP2000)
Recorrendo ao SAP2000 aplicando a combinação modal CQC, também se determinaram os
esforços na base do pilar para o pórtico como dois pisos.
Os resultados obtidos apresentam-se na Tabela 5.21
Tabela 5.21 - Valores obtidos da combinação modal CQC aplicada no SAP2000
Direcção de actuação do sismo
0˚ 203,04 105,66 234,05
30˚ 209,59 267,12 237,78
45˚ 213,40 323,16 215,13
60˚ 216,26 357,19 177,82
90˚ 216,95 351,61 70,30
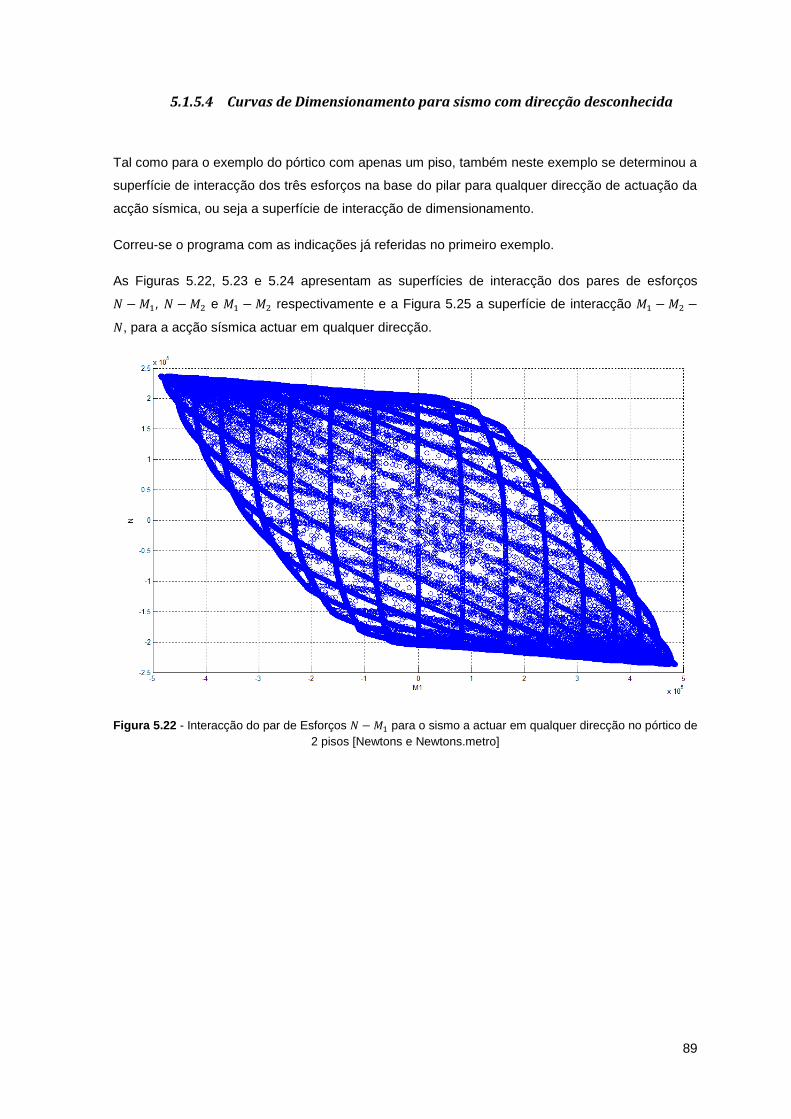
89
5.1.5.4 Curvas de Dimensionamento para sismo com direcção desconhecida
Tal como para o exemplo do pórtico com apenas um piso, também neste exemplo se determinou a
superfície de interacção dos três esforços na base do pilar para qualquer direcção de actuação da
acção sísmica, ou seja a superfície de interacção de dimensionamento.
Correu-se o programa com as indicações já referidas no primeiro exemplo.
As Figuras 5.22, 5.23 e 5.24 apresentam as superfícies de interacção dos pares de esforços
, e respectivamente e a Figura 5.25 a superfície de interacção
, para a acção sísmica actuar em qualquer direcção.
Figura 5.22 - Interacção do par de Esforços para o sismo a actuar em qualquer direcção no pórtico de
2 pisos [Newtons e Newtons.metro]
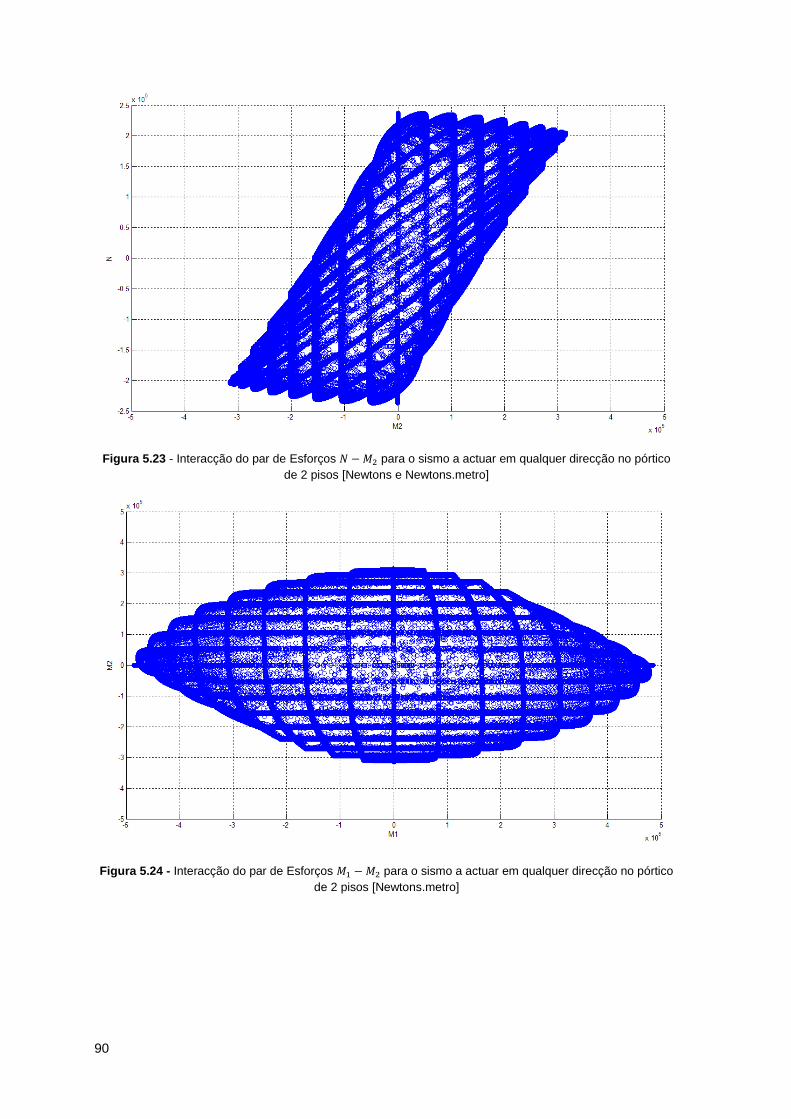
90
Figura 5.23 - Interacção do par de Esforços para o sismo a actuar em qualquer direcção no pórtico
de 2 pisos [Newtons e Newtons.metro]
Figura 5.24 - Interacção do par de Esforços para o sismo a actuar em qualquer direcção no pórtico
de 2 pisos [Newtons.metro]
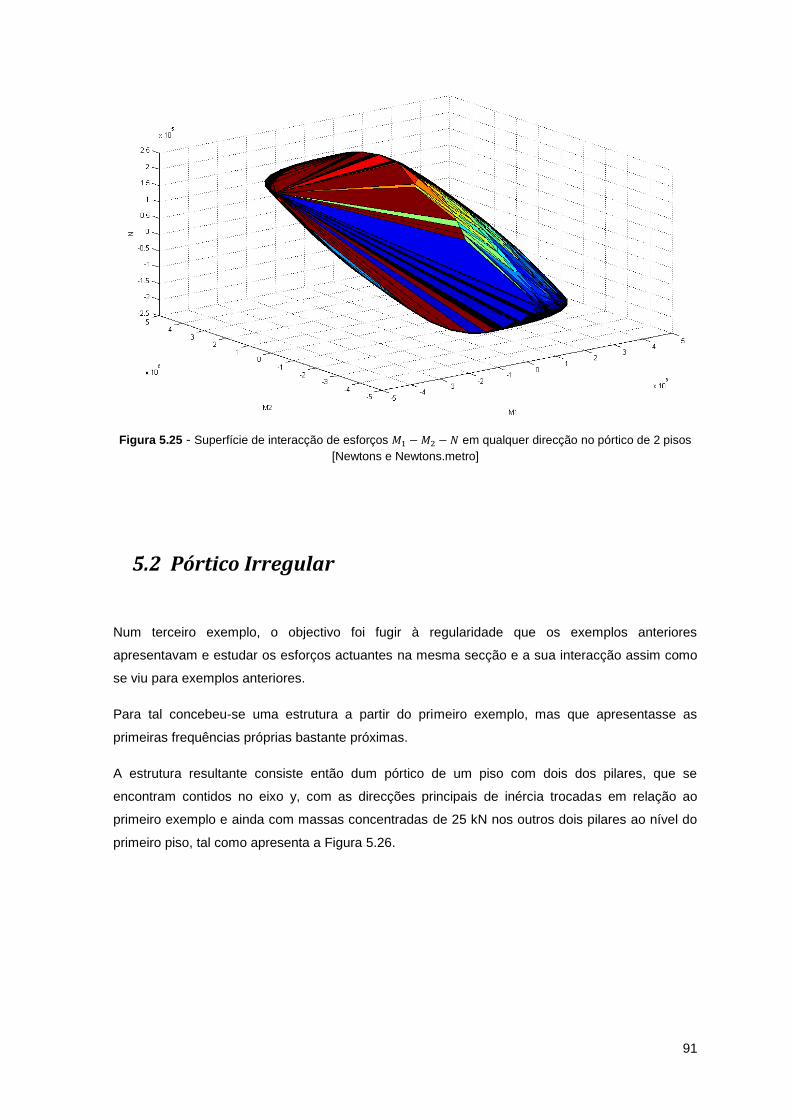
91
Figura 5.25 - Superfície de interacção de esforços em qualquer direcção no pórtico de 2 pisos
[Newtons e Newtons.metro]
5.2 Pórtico Irregular
Num terceiro exemplo, o objectivo foi fugir à regularidade que os exemplos anteriores
apresentavam e estudar os esforços actuantes na mesma secção e a sua interacção assim como
se viu para exemplos anteriores.
Para tal concebeu-se uma estrutura a partir do primeiro exemplo, mas que apresentasse as
primeiras frequências próprias bastante próximas.
A estrutura resultante consiste então dum pórtico de um piso com dois dos pilares, que se
encontram contidos no eixo y, com as direcções principais de inércia trocadas em relação ao
primeiro exemplo e ainda com massas concentradas de 25 kN nos outros dois pilares ao nível do
primeiro piso, tal como apresenta a Figura 5.26.
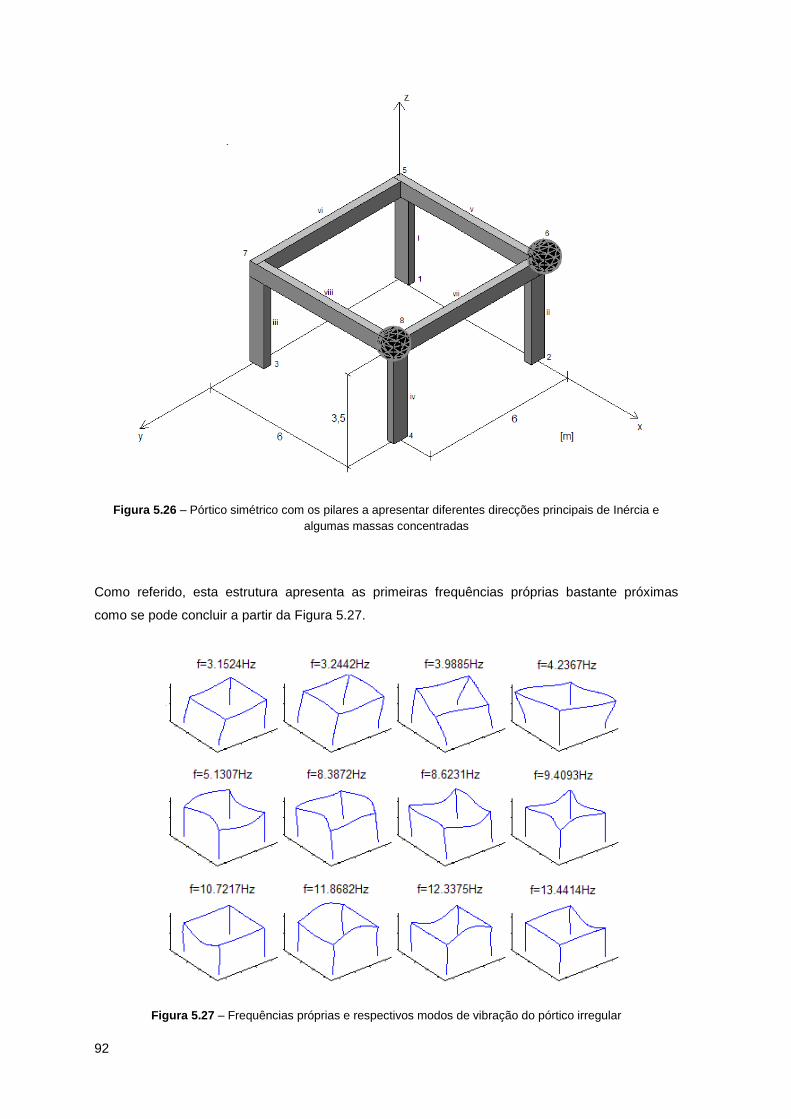
92
Figura 5.26 – Pórtico simétrico com os pilares a apresentar diferentes direcções principais de Inércia e
algumas massas concentradas
Como referido, esta estrutura apresenta as primeiras frequências próprias bastante próximas
como se pode concluir a partir da Figura 5.27.
Figura 5.27 – Frequências próprias e respectivos modos de vibração do pórtico irregular
93
5.2.1 Resposta para uma Direcção fixa
5.2.1.1 Projecção em e
O estudo dos esforços e sua interacção nesta estrutura, através de uma análise direccional, para
uma direcção fixa, é feito de forma análoga ao que foi feito para os outros exemplos, ou seja,
manteve-se a acção e repetiu-se todo o processo de cálculo da determinação das superfícies de
interacção e sua combinação.
Na análise de resultados, apenas houve alterações nas direcções de actuação do sismo que se
verificou necessário considerar. Nesta estrutura, pelo facto de não apresentar bissimetria, não é
suficiente uma análise com a acção sísmica a actuar apenas de 0° a 90° como se verificou nos
exemplos anteriores. Achou-se então necessário acrescentar direcções de actuação do sismo
contidas entre os 90° e os 180° sendo esta última segundo x tal como 0°.
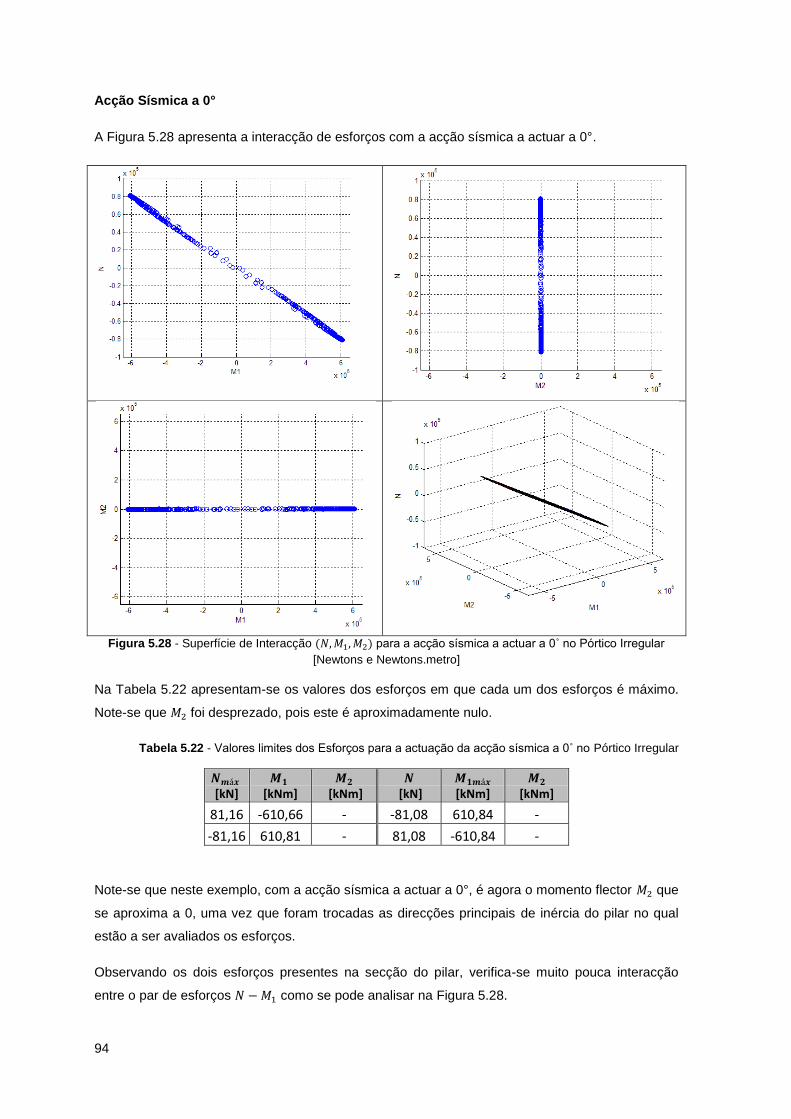
94
Acção Sísmica a 0°
A Figura 5.28 apresenta a interacção de esforços com a acção sísmica a actuar a 0°.
Figura 5.28 - Superfície de Interacção para a acção sísmica a actuar a 0˚ no Pórtico Irregular
[Newtons e Newtons.metro]
Na Tabela 5.22 apresentam-se os valores dos esforços em que cada um dos esforços é máximo.
Note-se que foi desprezado, pois este é aproximadamente nulo.
Tabela 5.22 - Valores limites dos Esforços para a actuação da acção sísmica a 0˚ no Pórtico Irregular
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
81,16 -610,66 - -81,08 610,84 -
-81,16 610,81 - 81,08 -610,84 -
Note-se que neste exemplo, com a acção sísmica a actuar a 0°, é agora o momento flector que
se aproxima a 0, uma vez que foram trocadas as direcções principais de inércia do pilar no qual
estão a ser avaliados os esforços.
Observando os dois esforços presentes na secção do pilar, verifica-se muito pouca interacção
entre o par de esforços como se pode analisar na Figura 5.28.
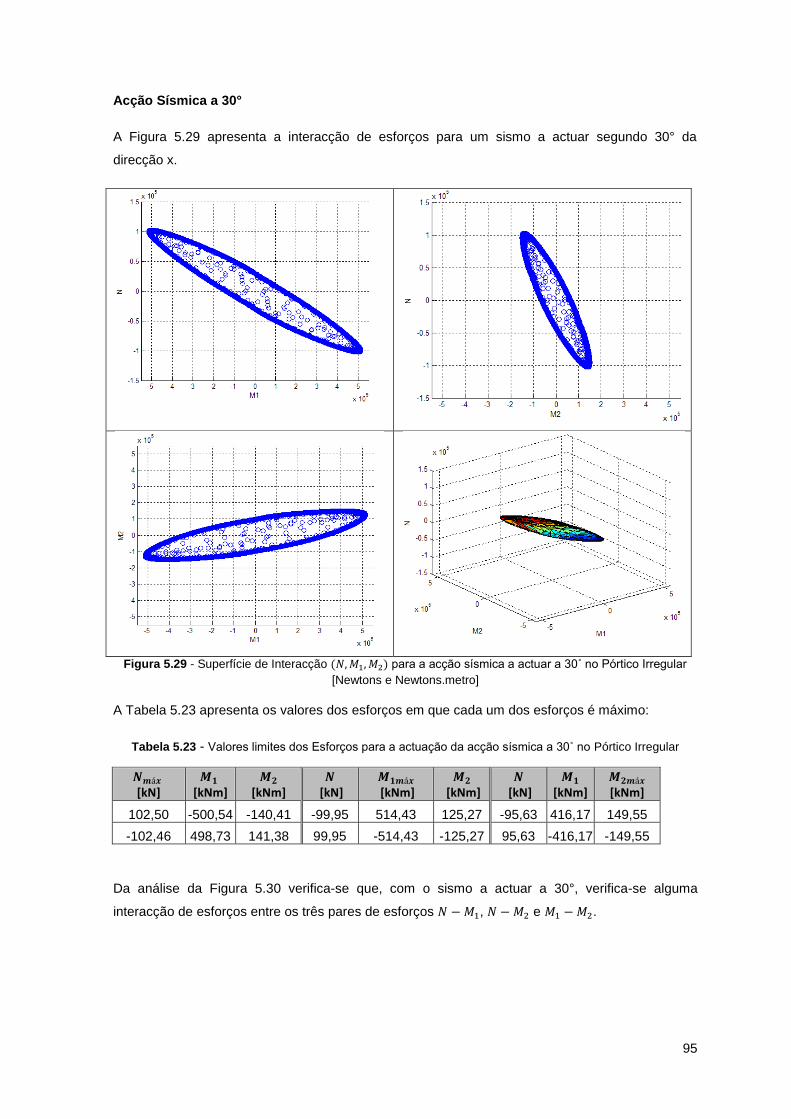
95
Acção Sísmica a 30°
A Figura 5.29 apresenta a interacção de esforços para um sismo a actuar segundo 30° da
direcção x.
Figura 5.29 - Superfície de Interacção para a acção sísmica a actuar a 30˚ no Pórtico Irregular
[Newtons e Newtons.metro]
A Tabela 5.23 apresenta os valores dos esforços em que cada um dos esforços é máximo:
Tabela 5.23 - Valores limites dos Esforços para a actuação da acção sísmica a 30˚ no Pórtico Irregular
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
102,50 -500,54 -140,41 -99,95 514,43 125,27 -95,63 416,17 149,55
-102,46 498,73 141,38 99,95 -514,43 -125,27 95,63 -416,17 -149,55
Da análise da Figura 5.30 verifica-se que, com o sismo a actuar a 30°, verifica-se alguma
interacção de esforços entre os três pares de esforços , e .
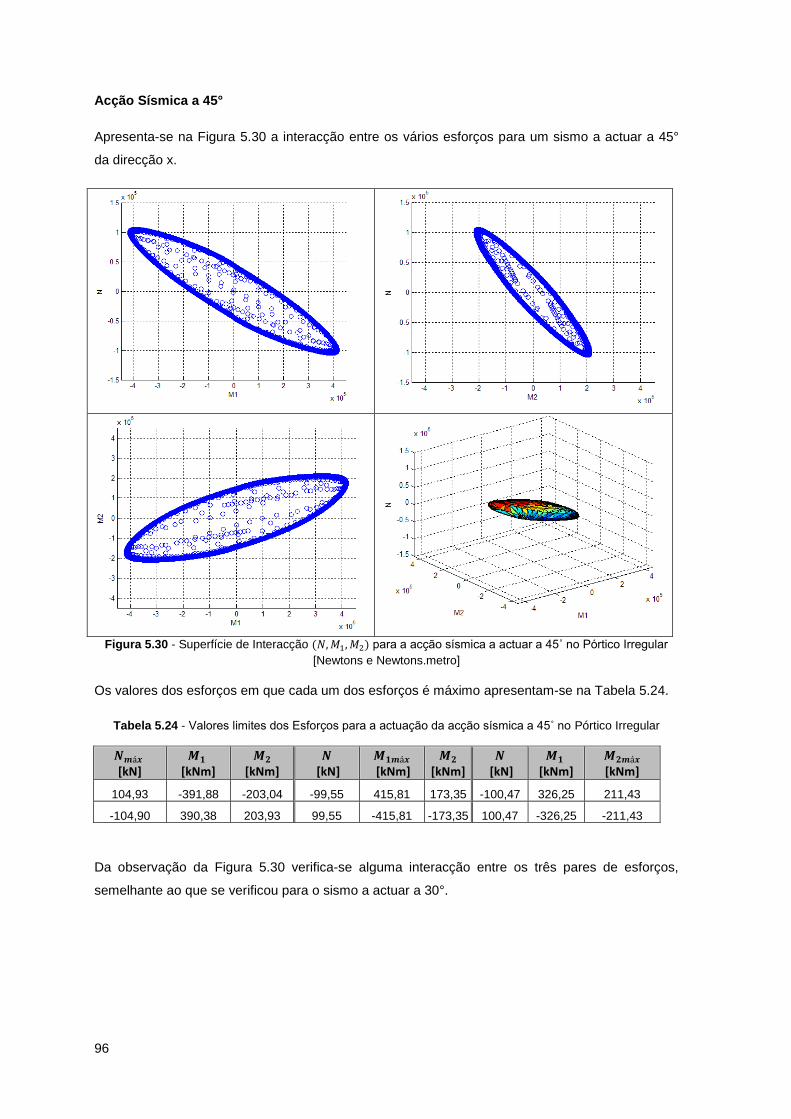
96
Acção Sísmica a 45°
Apresenta-se na Figura 5.30 a interacção entre os vários esforços para um sismo a actuar a 45°
da direcção x.
Figura 5.30 - Superfície de Interacção para a acção sísmica a actuar a 45˚ no Pórtico Irregular
[Newtons e Newtons.metro]
Os valores dos esforços em que cada um dos esforços é máximo apresentam-se na Tabela 5.24.
Tabela 5.24 - Valores limites dos Esforços para a actuação da acção sísmica a 45˚ no Pórtico Irregular
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
104,93 -391,88 -203,04 -99,55 415,81 173,35 -100,47 326,25 211,43
-104,90 390,38 203,93 99,55 -415,81 -173,35 100,47 -326,25 -211,43
Da observação da Figura 5.30 verifica-se alguma interacção entre os três pares de esforços,
semelhante ao que se verificou para o sismo a actuar a 30°.
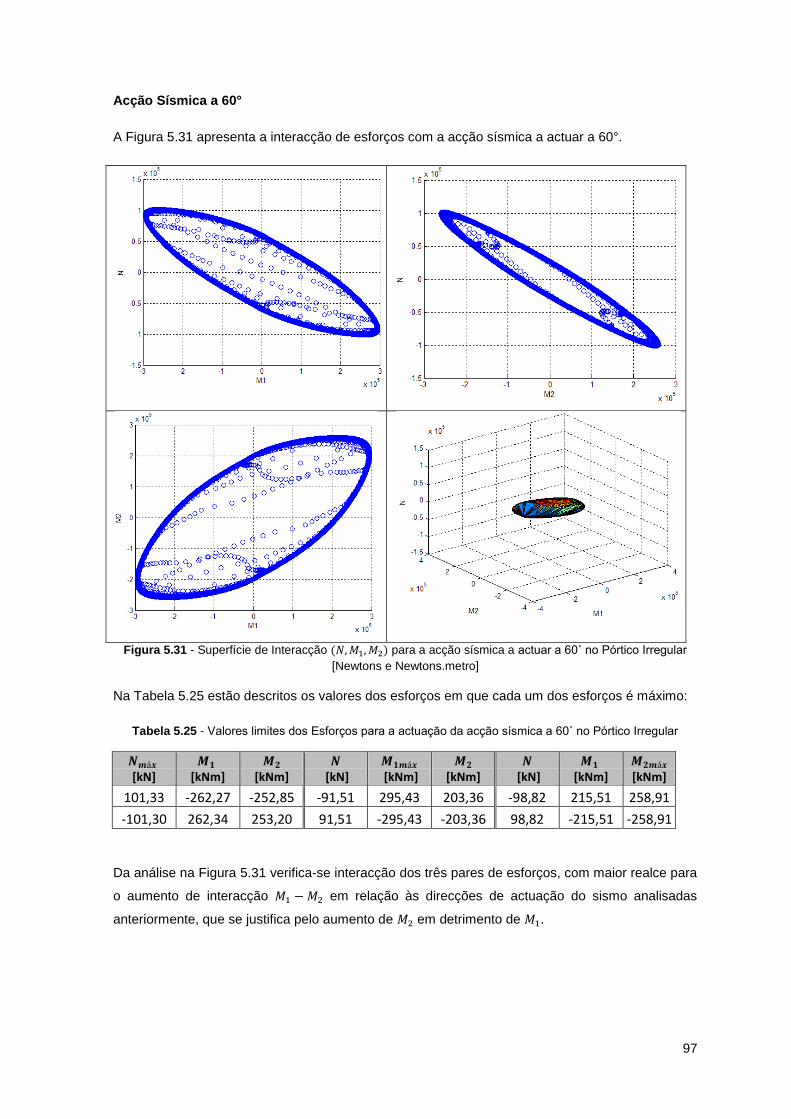
97
Acção Sísmica a 60°
A Figura 5.31 apresenta a interacção de esforços com a acção sísmica a actuar a 60°.
Figura 5.31 - Superfície de Interacção para a acção sísmica a actuar a 60˚ no Pórtico Irregular
[Newtons e Newtons.metro]
Na Tabela 5.25 estão descritos os valores dos esforços em que cada um dos esforços é máximo:
Tabela 5.25 - Valores limites dos Esforços para a actuação da acção sísmica a 60˚ no Pórtico Irregular
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
101,33 -262,27 -252,85 -91,51 295,43 203,36 -98,82 215,51 258,91
-101,30 262,34 253,20 91,51 -295,43 -203,36 98,82 -215,51 -258,91
Da análise na Figura 5.31 verifica-se interacção dos três pares de esforços, com maior realce para
o aumento de interacção em relação às direcções de actuação do sismo analisadas
anteriormente, que se justifica pelo aumento de em detrimento de .
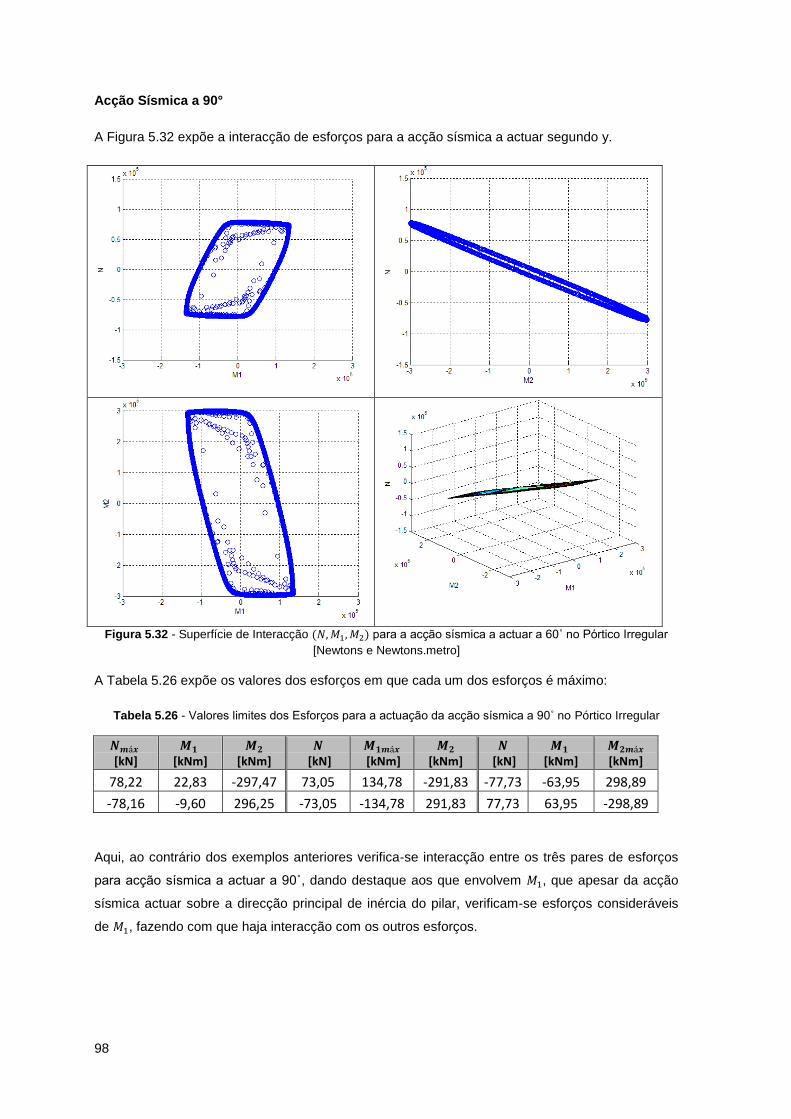
98
Acção Sísmica a 90°
A Figura 5.32 expõe a interacção de esforços para a acção sísmica a actuar segundo y.
Figura 5.32 - Superfície de Interacção para a acção sísmica a actuar a 60˚ no Pórtico Irregular
[Newtons e Newtons.metro]
A Tabela 5.26 expõe os valores dos esforços em que cada um dos esforços é máximo:
Tabela 5.26 - Valores limites dos Esforços para a actuação da acção sísmica a 90˚ no Pórtico Irregular
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
78,22 22,83 -297,47 73,05 134,78 -291,83 -77,73 -63,95 298,89
-78,16 -9,60 296,25 -73,05 -134,78 291,83 77,73 63,95 -298,89
Aqui, ao contrário dos exemplos anteriores verifica-se interacção entre os três pares de esforços
para acção sísmica a actuar a 90˚, dando destaque aos que envolvem , que apesar da acção
sísmica actuar sobre a direcção principal de inércia do pilar, verificam-se esforços consideráveis
de , fazendo com que haja interacção com os outros esforços.
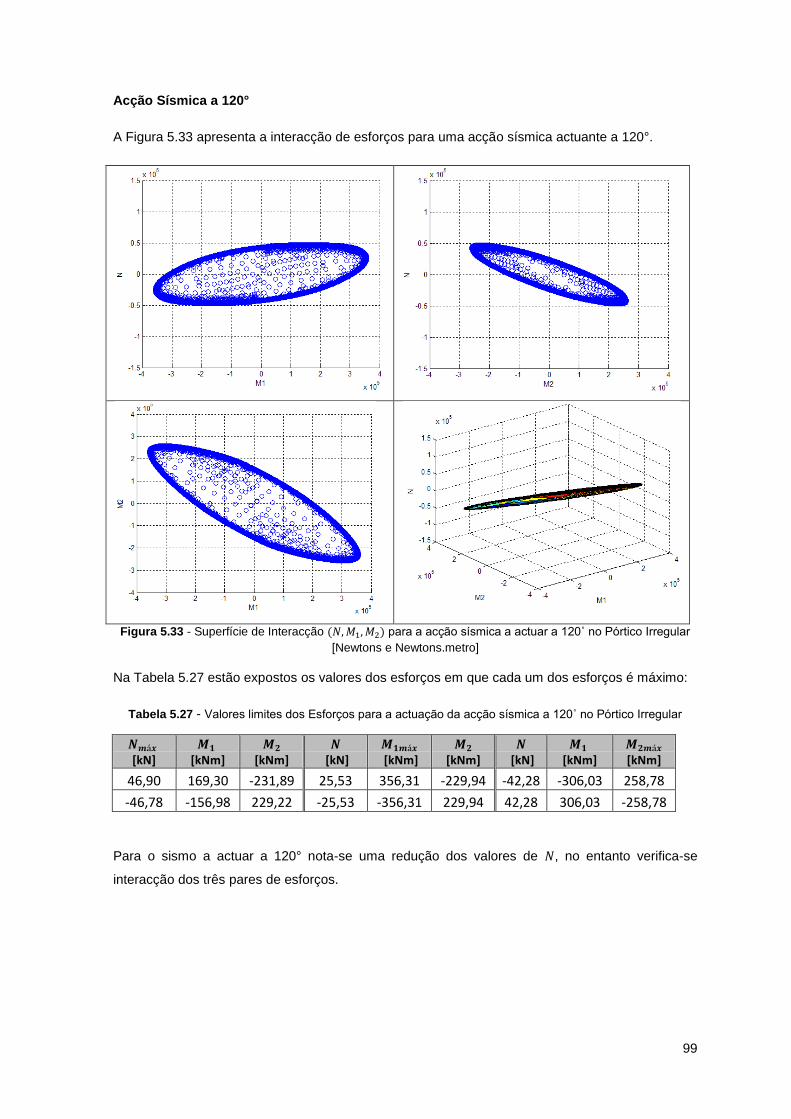
99
Acção Sísmica a 120°
A Figura 5.33 apresenta a interacção de esforços para uma acção sísmica actuante a 120°.
Figura 5.33 - Superfície de Interacção para a acção sísmica a actuar a 120˚ no Pórtico Irregular
[Newtons e Newtons.metro]
Na Tabela 5.27 estão expostos os valores dos esforços em que cada um dos esforços é máximo:
Tabela 5.27 - Valores limites dos Esforços para a actuação da acção sísmica a 120˚ no Pórtico Irregular
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
46,90 169,30 -231,89 25,53 356,31 -229,94 -42,28 -306,03 258,78
-46,78 -156,98 229,22 -25,53 -356,31 229,94 42,28 306,03 -258,78
Para o sismo a actuar a 120° nota-se uma redução dos valores de , no entanto verifica-se
interacção dos três pares de esforços.
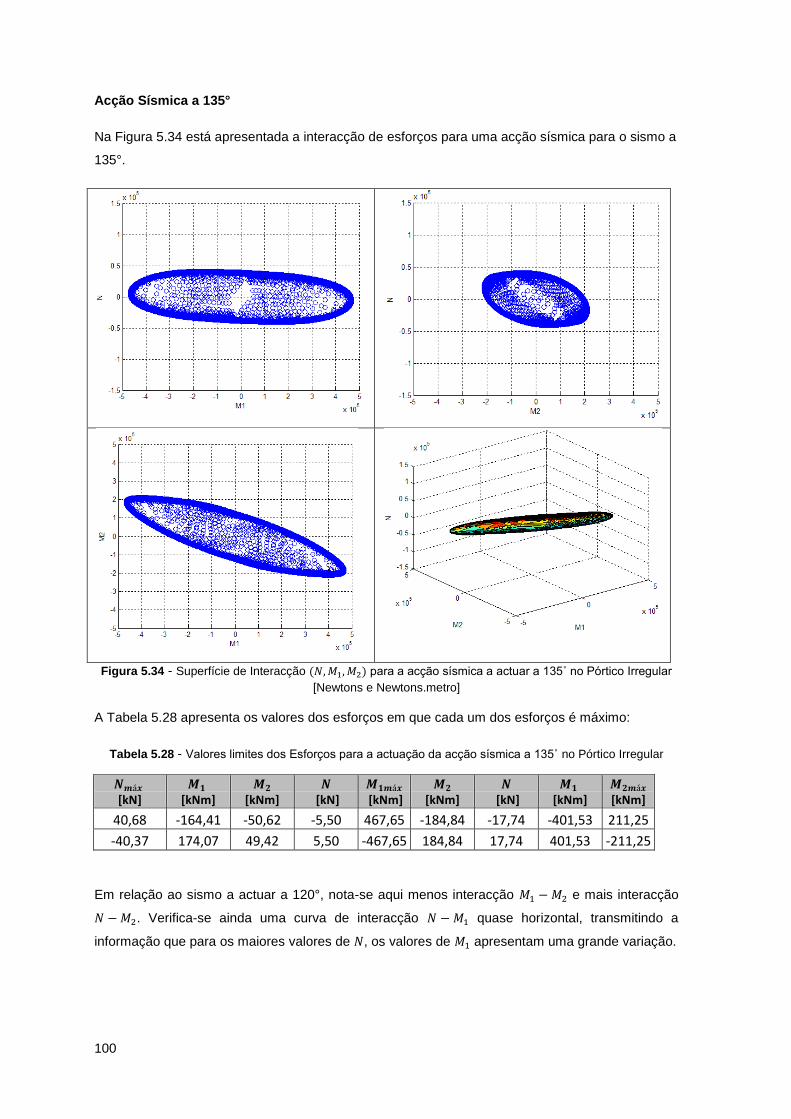
100
Acção Sísmica a 135°
Na Figura 5.34 está apresentada a interacção de esforços para uma acção sísmica para o sismo a
135°.
Figura 5.34 - Superfície de Interacção para a acção sísmica a actuar a 135˚ no Pórtico Irregular
[Newtons e Newtons.metro]
A Tabela 5.28 apresenta os valores dos esforços em que cada um dos esforços é máximo:
Tabela 5.28 - Valores limites dos Esforços para a actuação da acção sísmica a 135˚ no Pórtico Irregular
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
40,68 -164,41 -50,62 -5,50 467,65 -184,84 -17,74 -401,53 211,25
-40,37 174,07 49,42 5,50 -467,65 184,84 17,74 401,53 -211,25
Em relação ao sismo a actuar a 120°, nota-se aqui menos interacção e mais interacção
. Verifica-se ainda uma curva de interacção quase horizontal, transmitindo a
informação que para os maiores valores de , os valores de apresentam uma grande variação.
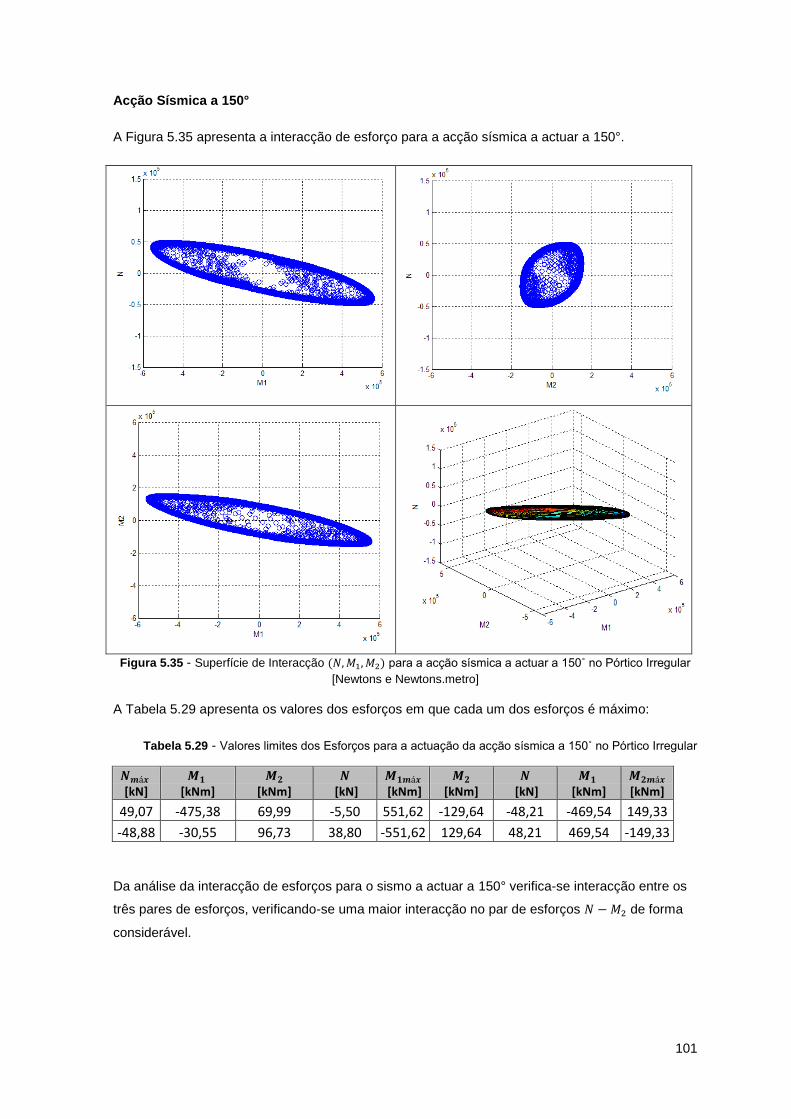
101
Acção Sísmica a 150°
A Figura 5.35 apresenta a interacção de esforço para a acção sísmica a actuar a 150°.
Figura 5.35 - Superfície de Interacção para a acção sísmica a actuar a 150˚ no Pórtico Irregular
[Newtons e Newtons.metro]
A Tabela 5.29 apresenta os valores dos esforços em que cada um dos esforços é máximo:
Tabela 5.29 - Valores limites dos Esforços para a actuação da acção sísmica a 150˚ no Pórtico Irregular
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
[kN]
[kNm]
[kNm]
49,07 -475,38 69,99 -5,50 551,62 -129,64 -48,21 -469,54 149,33
-48,88 -30,55 96,73 38,80 -551,62 129,64 48,21 469,54 -149,33
Da análise da interacção de esforços para o sismo a actuar a 150° verifica-se interacção entre os
três pares de esforços, verificando-se uma maior interacção no par de esforços de forma
considerável.
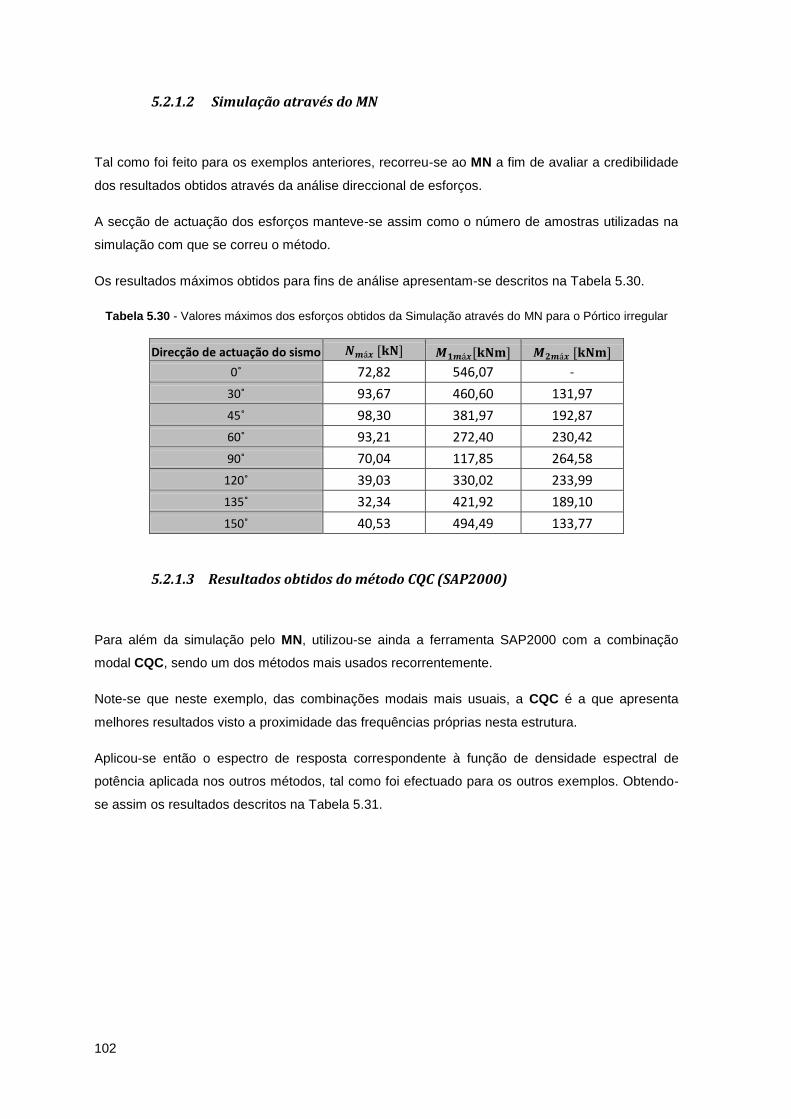
102
5.2.1.2 Simulação através do MN
Tal como foi feito para os exemplos anteriores, recorreu-se ao MN a fim de avaliar a credibilidade
dos resultados obtidos através da análise direccional de esforços.
A secção de actuação dos esforços manteve-se assim como o número de amostras utilizadas na
simulação com que se correu o método.
Os resultados máximos obtidos para fins de análise apresentam-se descritos na Tabela 5.30.
Tabela 5.30 - Valores máximos dos esforços obtidos da Simulação através do MN para o Pórtico irregular
Direcção de actuação do sismo
0˚ 72,82 546,07 -
30˚ 93,67 460,60 131,97
45˚ 98,30 381,97 192,87
60˚ 93,21 272,40 230,42
90˚ 70,04 117,85 264,58
120˚ 39,03 330,02 233,99
135˚ 32,34 421,92 189,10
150˚ 40,53 494,49 133,77
5.2.1.3 Resultados obtidos do método CQC (SAP2000)
Para além da simulação pelo MN, utilizou-se ainda a ferramenta SAP2000 com a combinação
modal CQC, sendo um dos métodos mais usados recorrentemente.
Note-se que neste exemplo, das combinações modais mais usuais, a CQC é a que apresenta
melhores resultados visto a proximidade das frequências próprias nesta estrutura.
Aplicou-se então o espectro de resposta correspondente à função de densidade espectral de
potência aplicada nos outros métodos, tal como foi efectuado para os outros exemplos. Obtendo-
se assim os resultados descritos na Tabela 5.31.
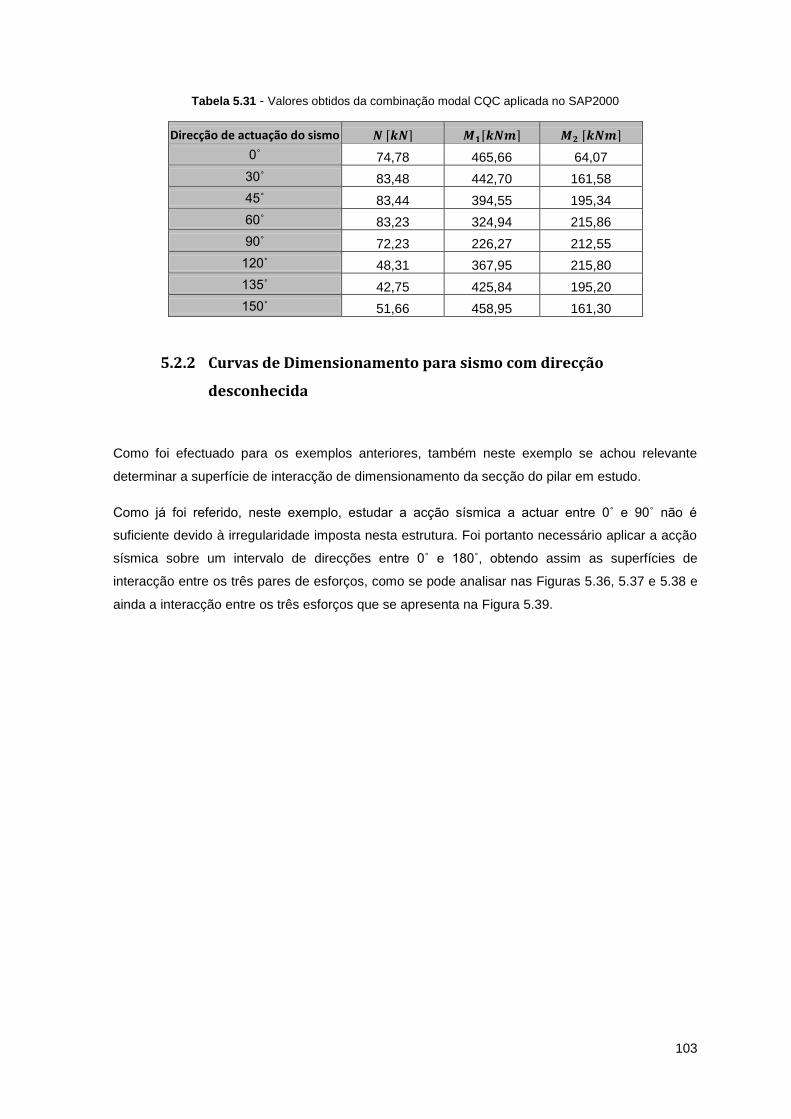
103
Tabela 5.31 - Valores obtidos da combinação modal CQC aplicada no SAP2000
Direcção de actuação do sismo
0˚ 74,78 465,66 64,07
30˚ 83,48 442,70 161,58
45˚ 83,44 394,55 195,34
60˚ 83,23 324,94 215,86
90˚ 72,23 226,27 212,55
120˚ 48,31 367,95 215,80
135˚ 42,75 425,84 195,20
150˚ 51,66 458,95 161,30
5.2.2 Curvas de Dimensionamento para sismo com direcção
desconhecida
Como foi efectuado para os exemplos anteriores, também neste exemplo se achou relevante
determinar a superfície de interacção de dimensionamento da secção do pilar em estudo.
Como já foi referido, neste exemplo, estudar a acção sísmica a actuar entre 0˚ e 90˚ não é
suficiente devido à irregularidade imposta nesta estrutura. Foi portanto necessário aplicar a acção
sísmica sobre um intervalo de direcções entre 0˚ e 180˚, obtendo assim as superfícies de
interacção entre os três pares de esforços, como se pode analisar nas Figuras 5.36, 5.37 e 5.38 e
ainda a interacção entre os três esforços que se apresenta na Figura 5.39.
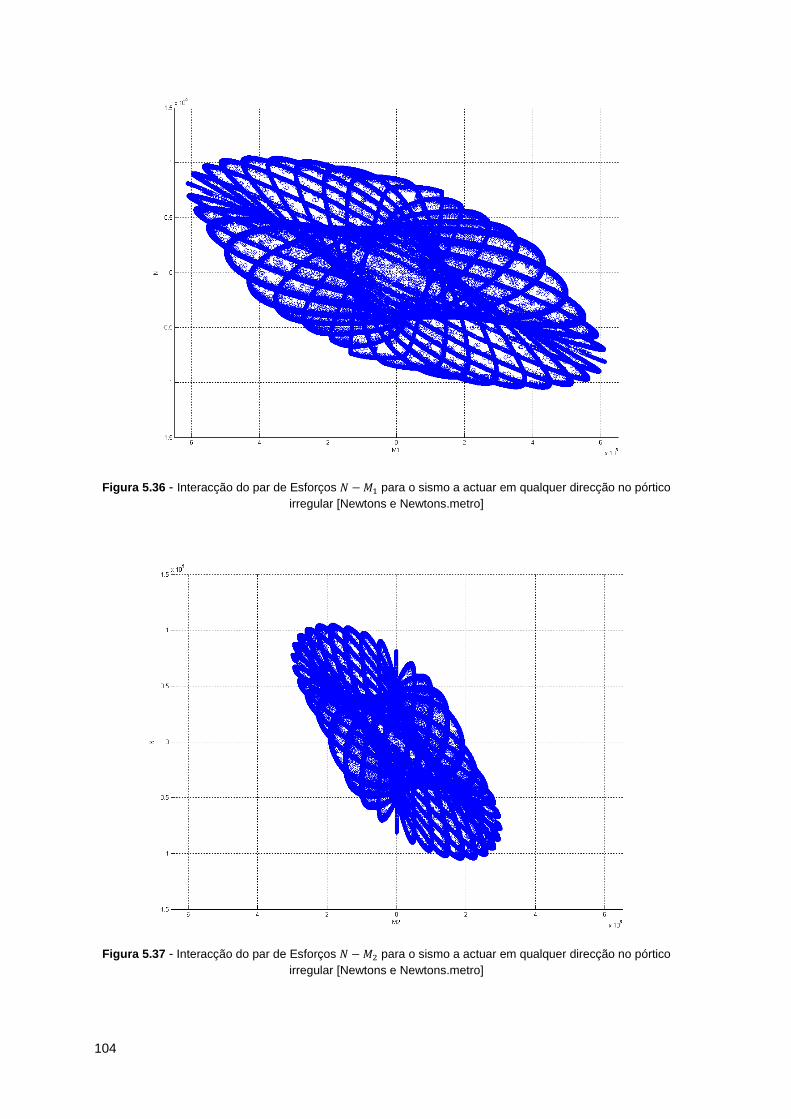
104
Figura 5.36 - Interacção do par de Esforços para o sismo a actuar em qualquer direcção no pórtico
irregular [Newtons e Newtons.metro]
Figura 5.37 - Interacção do par de Esforços para o sismo a actuar em qualquer direcção no pórtico
irregular [Newtons e Newtons.metro]
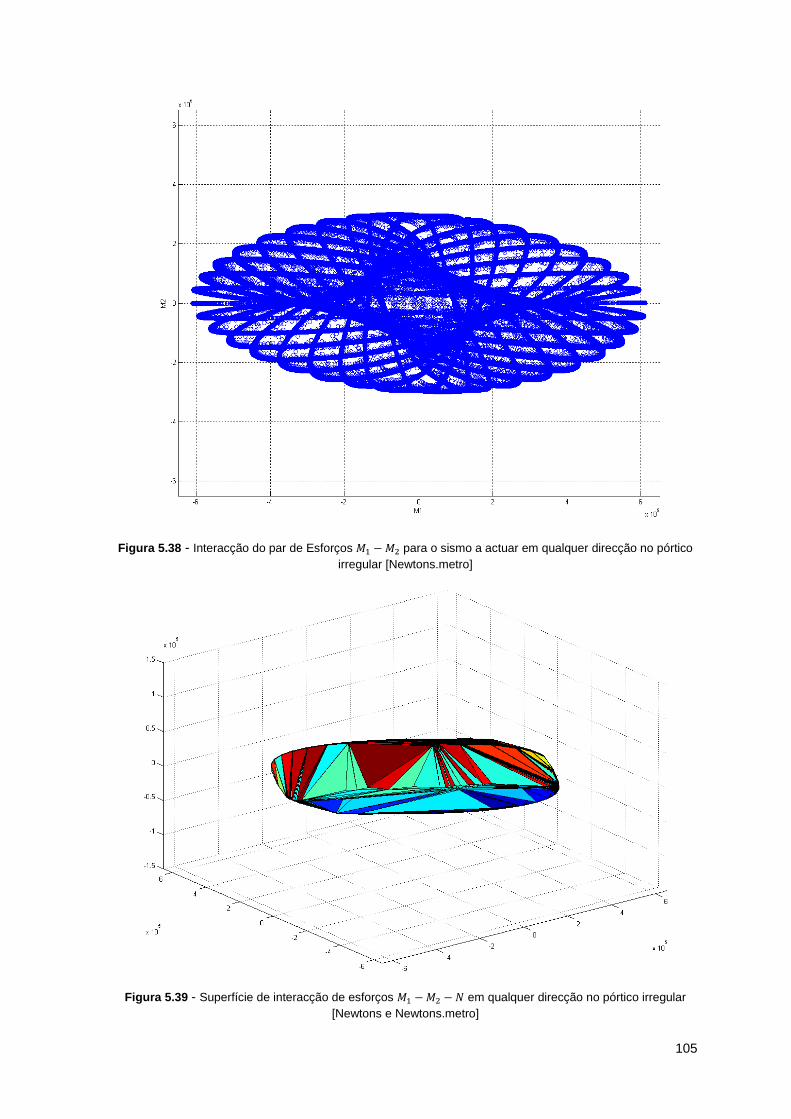
105
Figura 5.38 - Interacção do par de Esforços para o sismo a actuar em qualquer direcção no pórtico
irregular [Newtons.metro]
Figura 5.39 - Superfície de interacção de esforços em qualquer direcção no pórtico irregular
[Newtons e Newtons.metro]

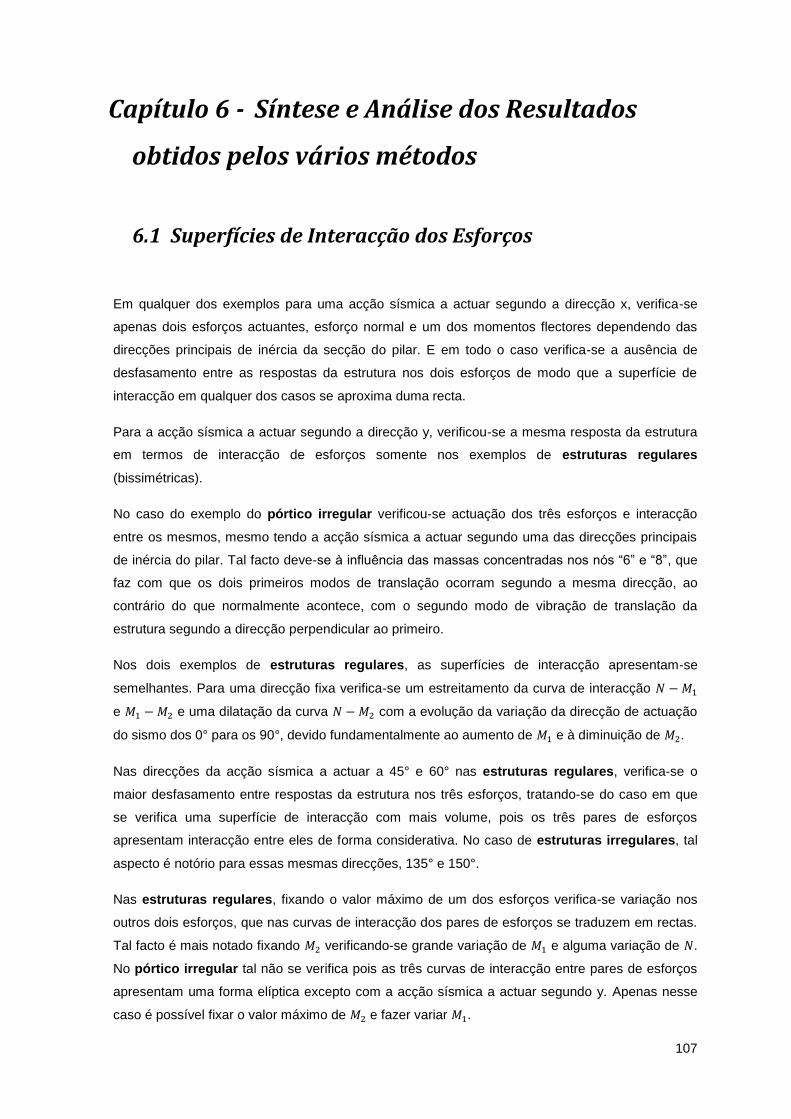
107
Capítulo 6 - Síntese e Análise dos Resultados
obtidos pelos vários métodos
6.1 Superfícies de Interacção dos Esforços
Em qualquer dos exemplos para uma acção sísmica a actuar segundo a direcção x, verifica-se
apenas dois esforços actuantes, esforço normal e um dos momentos flectores dependendo das
direcções principais de inércia da secção do pilar. E em todo o caso verifica-se a ausência de
desfasamento entre as respostas da estrutura nos dois esforços de modo que a superfície de
interacção em qualquer dos casos se aproxima duma recta.
Para a acção sísmica a actuar segundo a direcção y, verificou-se a mesma resposta da estrutura
em termos de interacção de esforços somente nos exemplos de estruturas regulares
(bissimétricas).
No caso do exemplo do pórtico irregular verificou-se actuação dos três esforços e interacção
entre os mesmos, mesmo tendo a acção sísmica a actuar segundo uma das direcções principais
de inércia do pilar. Tal facto deve-se à influência das massas concentradas nos nós “6” e “8”, que
faz com que os dois primeiros modos de translação ocorram segundo a mesma direcção, ao
contrário do que normalmente acontece, com o segundo modo de vibração de translação da
estrutura segundo a direcção perpendicular ao primeiro.
Nos dois exemplos de estruturas regulares, as superfícies de interacção apresentam-se
semelhantes. Para uma direcção fixa verifica-se um estreitamento da curva de interacção
e e uma dilatação da curva com a evolução da variação da direcção de actuação
do sismo dos 0° para os 90°, devido fundamentalmente ao aumento de e à diminuição de .
Nas direcções da acção sísmica a actuar a 45° e 60° nas estruturas regulares, verifica-se o
maior desfasamento entre respostas da estrutura nos três esforços, tratando-se do caso em que
se verifica uma superfície de interacção com mais volume, pois os três pares de esforços
apresentam interacção entre eles de forma considerativa. No caso de estruturas irregulares, tal
aspecto é notório para essas mesmas direcções, 135° e 150°.
Nas estruturas regulares, fixando o valor máximo de um dos esforços verifica-se variação nos
outros dois esforços, que nas curvas de interacção dos pares de esforços se traduzem em rectas.
Tal facto é mais notado fixando verificando-se grande variação de e alguma variação de .
No pórtico irregular tal não se verifica pois as três curvas de interacção entre pares de esforços
apresentam uma forma elíptica excepto com a acção sísmica a actuar segundo y. Apenas nesse
caso é possível fixar o valor máximo de e fazer variar .
108
No exemplo do pórtico irregular, quando um dos momentos é máximo, verifica-se o valor do
outro momento muito próximo do valor máximo. Tal facto deve-se à proximidade dos primeiros
modos de vibração da estrutura o que faculta grande interacção entre eles.
Na mesma linha de raciocínio também se observa que nos exemplos das estruturas regulares
para valores máximos, apresentam-se valores de momentos com sinais contrários e o valor de
esforço normal apresenta o mesmo sinal que . No exemplo do pórtico irregular também em
termos de máximos, os valores de momentos apresentam o mesmo sinal e contrário ao do esforço
normal com a acção sísmica a actuar de 0 a 90°. De 90 a 180° já se verificam sinais contrários nos
valores dos momentos. Tal facto deve-se à diferença na orientação da secção entre os exemplos.
Na estrutura irregular verifica-se uma expansão de todas as curvas que representam a
interacção entre os 3 pares de esforços variando a direcção do sismo de 0° a 90°. Variando depois
até aos 180° verifica-se um estreitamento das curvas de interacção dos pares de esforços
e e um alargamento da curva de interacção . Resultados esses que resultam da
diminuição significativa de a partir dos 90°.
.
6.2 Comparação entre os vários métodos
Para além da análise direccional de esforços, a qual foi objecto de estudo neste trabalho,
obtiveram-se resultados efectuando uma simulação através do MN, e ainda resultados recorrendo
ao método de sobreposição modal CQC, através do programa SAP2000. A análise comparativa
entre os vários métodos tem uma função apenas de validação do método que foi aplicado. Pois as
superfícies de interacção apenas são obtidas pela análise direccional de esforços, enquanto os
outros métodos apenas fornecem valores de esforços máximos, o que resultaria em superfícies de
interacção paralelepipédicas.
A extracção de resultados através da combinação modal CQC, recorrendo ao SAP2000 foi
efectuada pelo facto de correntemente os métodos de sobreposição modal serem os mais usuais.
E como se pode verificar da análise da Tabela 6.1, verifica-se alguma discrepância de valores
máximos dos esforços comparando os valores obtidos do CQC com os obtidos da análise
direccional apresentando-se estes últimos superiores, com uma diferença média de 14%,
considerando todos os valores de esforços obtidos para os três casos estudados como
demonstrado nas Tabelas 6.2 e 6.3.
A aplicação do MN também serviu de comparação aos resultados obtidos da análise direccional
de esforços. Este método tem a vantagem de aqui ser aplicado o sismo através da função de
densidade espectral de potência de aceleração tal como é feito na análise direccional de esforços.
A partir daí, cada sismo é aleatório podendo apresentar valores mais ou menos favoráveis.
Através do estudo estatístico efectuado, determinou-se um número de amostras razoável com o
109
intuito deste método poder servir de referência. Ao analisar novamente a Tabela 6.1 também aqui
se verificou alguma diferença sendo maiores os esforços resultantes da análise direccional de
esforços, no entanto menos notória, uma diferença média de 12,1%, considerando igualmente
todos os valores de esforços obtidos para os três casos estudados expostos nas Tabelas 6.2 e
6.3.
Na comparação dos valores máximos obtidos dos Momentos e através da análise
direccional de esforços com o método de Sobreposição modal CQC nos três exemplos, verifica-se
uma evolução constante da diferença entre valores à medida que se vai variando a direcção. Para
o sismo a actuar a 30º, o momento obtido através do CQC, verifica-se maior que o obtido da
análise direccional de esforços. A 45º já se verifica um valor maior de da análise direccional em
relação ao CQC, aumentando a diferença à medida que a direcção de actuação do sismo também
vai variando até aos 90º. Em relação ao momento verifica-se o contrário, com a acção sísmica
a actuar a 60º verifica-se superior quando estudado pelo CQC.
Isto deve-se fundamentalmente ao facto no CQC, numa direcção específica de actuação do sismo,
considerar a acção também a actuar na direcção ortogonal em simultâneo. Tal não se verifica nem
na análise direccional dos esforços nem no MN. Também devido a este facto se desprezou a
comparação de valores para uma direcção fixa coincidente com eixos principais de inércia do pilar.
Outro aspecto que pode ter condicionado os resultados, é o facto de não se ter considerado uma
envolvente do tipo beta na acção sísmica, que faria com que o tempo da acção sísmica na sua
máxima potencia reduzisse, tendo influência no valor do parâmetro que traduz a “passagem” do
valor médio esperado de cada esforço para o valor máximo, , no que diz respeito à análise
direccional de esforços e à redução do tempo no sismo gerado para obtenção de esforços pelo
MN.
Também a obtenção dos valores esperados dos máximos dos esforços, em que se parte de uma
análise estatística que envolve a obtenção do parâmetro pode não ter sido efectuada da forma
mais precisa, porque as variações de cada esforços não são independentes. Ter este facto em
consideração implica que a teoria usada para a obtenção dos valores esperados do máximo de
cada esforço seja objecto de um estudo mais detalhado, o qual ultrapassa o âmbito deste trabalho.
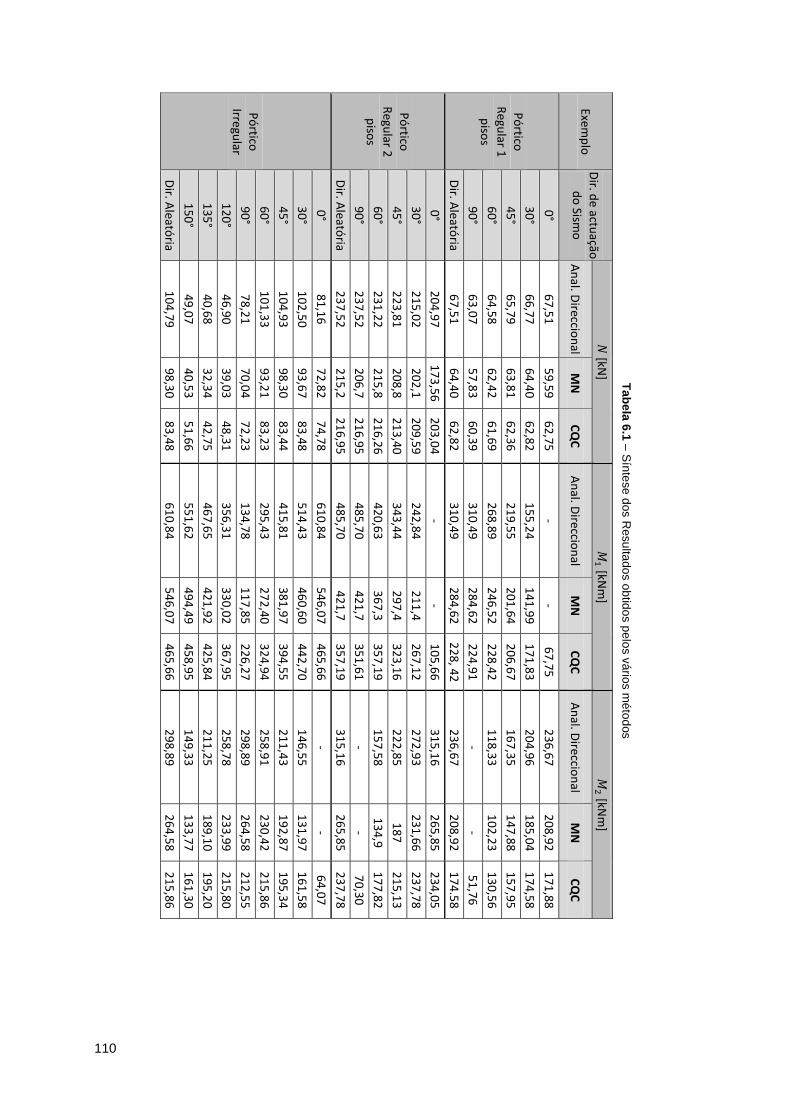
110
Pó
rtico
Irregular
Pó
rtico
Regu
lar 2
piso
s
Pó
rtico
Regu
lar 1
piso
s
Exemp
lo
Dir. A
leatória
15
0°
13
5°
12
0°
90
°
60
°
45
°
30
°
0°
Dir. A
leatória
90
°
60
°
45
°
30
°
0°
Dir. A
leatória
90
°
60
°
45
°
30
°
0°
Dir. d
e actuação
do
Sismo
10
4,7
9
49
,07
40
,68
46
,90
78
,21
10
1,3
3
10
4,9
3
10
2,5
0
81
,16
23
7,5
2
23
7,5
2
23
1,2
2
22
3,8
1
21
5,0
2
20
4,9
7
67
,51
63
,07
64
,58
65
,79
66
,77
67
,51
An
al. Direccio
nal
[kN
]
98
,30
40
,53
32
,34
39
,03
70
,04
93
,21
98
,30
93
,67
72
,82
21
5,2
20
6,7
21
5,8
20
8,8
20
2,1
17
3,5
6
64
,40
57
,83
62
,42
63
,81
64
,40
59
,59
MN
83
,48
51
,66
42
,75
48
,31
72
,23
83
,23
83
,44
83
,48
74
,78
21
6,9
5
21
6,9
5
21
6,2
6
21
3,4
0
20
9,5
9
20
3,0
4
62
,82
60
,39
61
,69
62
,36
62
,82
62
,75
CQ
C
61
0,8
4
55
1,6
2
46
7,6
5
35
6,3
1
13
4,7
8
29
5,4
3
41
5,8
1
51
4,4
3
61
0,8
4
48
5,7
0
48
5,7
0
42
0,6
3
34
3,4
4
24
2,8
4
-
31
0,4
9
31
0,4
9
26
8,8
9
21
9,5
5
15
5,2
4
-
An
al. Direccio
nal
[kN
m]
54
6,0
7
49
4,4
9
42
1,9
2
33
0,0
2
11
7,8
5
27
2,4
0
38
1,9
7
46
0,6
0
54
6,0
7
42
1,7
42
1,7
36
7,3
29
7,4
21
1,4
-
28
4,6
2
28
4,6
2
24
6,5
2
20
1,6
4
14
1,9
9
-
MN
46
5,6
6
45
8,9
5
42
5,8
4
36
7,9
5
22
6,2
7
32
4,9
4
39
4,5
5
44
2,7
0
46
5,6
6
35
7,1
9
35
1,6
1
35
7,1
9
32
3,1
6
26
7,1
2
10
5,6
6
22
8, 4
2
22
4,9
1
22
8,4
2
20
6,6
7
17
1,8
3
67
,75
CQ
C
29
8,8
9
14
9,3
3
21
1,2
5
25
8,7
8
29
8,8
9
25
8,9
1
21
1,4
3
14
6,5
5
-
31
5,1
6
-
15
7,5
8
22
2,8
5
27
2,9
3
31
5,1
6
23
6,6
7
-
11
8,3
3
16
7,3
5
20
4,9
6
23
6,6
7
An
al. Direccio
nal
[kN
m]
26
4,5
8
13
3,7
7
18
9,1
0
23
3,9
9
26
4,5
8
23
0,4
2
19
2,8
7
13
1,9
7
-
26
5,8
5
-
13
4,9
18
7
23
1,6
6
26
5,8
5
20
8,9
2
-
10
2,2
3
14
7,8
8
18
5,0
4
20
8,9
2
MN
21
5,8
6
16
1,3
0
19
5,2
0
21
5,8
0
21
2,5
5
21
5,8
6
19
5,3
4
16
1,5
8
64
,07
23
7,7
8
70
,30
17
7,8
2
21
5,1
3
23
7,7
8
23
4,0
5
17
4.5
8
51
,76
13
0,5
6
15
7,9
5
17
4,5
8
17
1,8
8
CQ
C
Ta
be
la 6
.1 –
Sín
tese
dos R
esu
ltado
s o
btid
os p
elo
s v
ário
s m
éto
dos
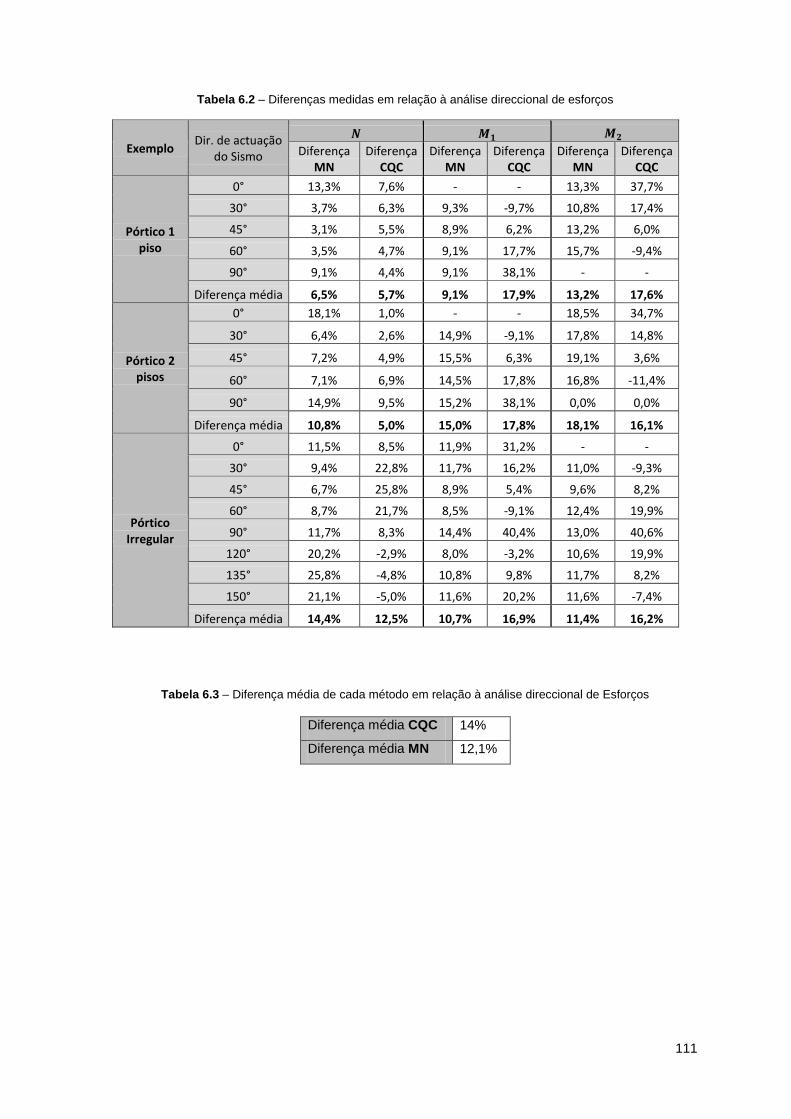
111
Tabela 6.2 – Diferenças medidas em relação à análise direccional de esforços
Exemplo Dir. de actuação
do Sismo
Diferença MN
Diferença CQC
Diferença MN
Diferença CQC
Diferença MN
Diferença CQC
Pórtico 1 piso
0° 13,3% 7,6% - - 13,3% 37,7%
30° 3,7% 6,3% 9,3% -9,7% 10,8% 17,4%
45° 3,1% 5,5% 8,9% 6,2% 13,2% 6,0%
60° 3,5% 4,7% 9,1% 17,7% 15,7% -9,4%
90° 9,1% 4,4% 9,1% 38,1% - -
Diferença média 6,5% 5,7% 9,1% 17,9% 13,2% 17,6%
Pórtico 2 pisos
0° 18,1% 1,0% - - 18,5% 34,7%
30° 6,4% 2,6% 14,9% -9,1% 17,8% 14,8%
45° 7,2% 4,9% 15,5% 6,3% 19,1% 3,6%
60° 7,1% 6,9% 14,5% 17,8% 16,8% -11,4%
90° 14,9% 9,5% 15,2% 38,1% 0,0% 0,0%
Diferença média 10,8% 5,0% 15,0% 17,8% 18,1% 16,1%
Pórtico Irregular
0° 11,5% 8,5% 11,9% 31,2% - -
30° 9,4% 22,8% 11,7% 16,2% 11,0% -9,3%
45° 6,7% 25,8% 8,9% 5,4% 9,6% 8,2%
60° 8,7% 21,7% 8,5% -9,1% 12,4% 19,9%
90° 11,7% 8,3% 14,4% 40,4% 13,0% 40,6%
120° 20,2% -2,9% 8,0% -3,2% 10,6% 19,9%
135° 25,8% -4,8% 10,8% 9,8% 11,7% 8,2%
150° 21,1% -5,0% 11,6% 20,2% 11,6% -7,4%
Diferença média 14,4% 12,5% 10,7% 16,9% 11,4% 16,2%
Tabela 6.3 – Diferença média de cada método em relação à análise direccional de Esforços
Diferença média CQC 14%
Diferença média MN 12,1%

113
Capítulo 7 - Conclusões
7.1 Considerações Finais
O estudo realizado teve como objectivo definir um método para determinar uma combinação de
esforços decorrentes de uma acção sísmica em estruturas tridimensionais, no domínio da
frequência, através de uma análise linear que tenha em consideração a interacção entre esforço
normal, momento flector e momento flector . A aplicação do método desenvolvido foi
ilustrada através da sua aplicação em algumas estruturas porticadas.
Para tal, numa fase inicial foram determinados os esforços numa secção da base do pórtico
recorrendo ao MEF, e posteriormente procedeu-se ao cálculo das superfícies de Interacção
e à sua combinação para a acção sísmica definida a partir do espectro de densidade
espectral de potência de acelerações.
7.2 Considerações sobre o método desenvolvido
Para a obtenção da superfície de interacção de dimensionamento para a secção
estudada devido a actuação de um sismo de tipo I actuante num solo de tipo II, tal como definido
no R.S.A., numa primeira instancia foi necessário recorrer a uma manipulação da função de
densidade espectral de potência de acelerações do sismo, uma vez que esta apenas permite o
cálculo do valor esperado quadrático dos esforços, ou seja, apenas é possível determinar-se os
correspondentes módulos dos seus valores médios, impossibilitando deste modo, uma análise
direccional do esforço normal, momento flector e momento flector no seu plano de
interacção.
Primeiramente tratando-se da análise do comportamento dinâmico de uma estrutura é importante
conhecer-se os valores máximos dos esforços, uma vez que são estes que condicionam a
segurança da estrutura. Sendo a função de densidade espectral de potência de aceleração um
processo estocástico Gaussiano ergódico e admitindo a sua estacionaridade, estudos
desenvolvido por Davenport de acordo com (Clough & Penzien, 1995) possibilitam definir o valor
esperado máximo das funções de densidades espectral do esforço normal e do momentos
flectores na secção de estudo, originadas a partir da resposta da estrutura.
Posteriormente definidos os valores esperados dos máximos de tais esforços, a técnica usada
permite a reposição do valor dos esforços na sua forma complexa, sendo garantido que os
respectivos módulos não sofrem alteração, possibilitando-se assim a definição das superfícies de
114
interacção para cada frequência e o consequente estudo direccional dos seus
respectivos valores no espaço da interacção. Esse facto é determinante para conhecer os valores
máximos dos esforços.
A forma das superfícies de interacção, determinadas para cada frequência de excitação, é
condicionada pelo desfasamento existente entre os esforços. Caso apenas ocorra desfasamento
entre dois dos esforços a superfície reduz-se a uma elipse e na ausência de desfasamento entre
esforços a superfície reduz-se a uma recta. Por sua vez ocorrendo desfasamento entre os três
esforços a superfície apresenta uma forma volumosa.
Por sua vez, a combinação de todas as curvas de interacção calculadas resulta na superfície de
interacção . Fazendo o estudo para todas as possíveis direcções que podem alterar a
resposta da estrutura e sobrepondo-as, obtêm-se a superfície de dimensionamento.
Para tal, para cada direcção de actuação do sismo, calculou-se a “taxa de crescimento” dos
esforços de modo a possibilitar a realização integração dos esforços no espectro de frequências
que define o sismo. Esse facto, permite ter em consideração a evolução dos esforços ao longo das
frequências de excitação da estrutura, sendo que através da manipulação atrás referida, os
valores assumem a forma complexa, originando o resultado final, uma superfície que traduz o
valor esperado da interacção máxima entre os esforços, combinadas todas as frequências de
excitação.
7.3 Limitações do Método do Numérico
O método apresenta no entanto algumas limitações. A matriz de amortecimento definida não
considera constante o coeficiente de amortecimento da estrutura, fazendo-o depender da
frequência de excitação.
A opção que recaiu, na manipulação da matriz de amortecimento, de modo a definir-se
concretamente o coeficiente de amortecimento associado ao primeiro e segundo modo de
vibração, o que origina uma perda de importância da grande maioria das restantes frequências de
excitação.
Poder-se-ia realizar um estudo dos modos condicionantes do comportamento dinâmico de cada
estrutura e posteriormente manipular-se do mesmo modo a matriz de amortecimento. Não
deixando, no entanto de ser questionável tal manipulação, sendo necessários mais estudos que a
fundamentem, que no entanto não foram realizados.
No que diz respeito à determinação da superfície de interacção de dimensionamento,
uma das hipóteses simplificativas do método numérico, recai na independência entre frequências
de excitação da estrutura para efeitos de cálculo. Tal consideração é conservativa, uma vez que é
115
pouco provável a ocorrência simultânea do máximo da interacção em todas as frequências de
excitação.
Verificou-se através das formas das superfícies de interacção obtidas para uma
direcção específica a influência que a interacção entre modos de vibração da estrutura apresenta
O método apenas considera, para cada sismo, a acção a actuar numa uma direcção exacta, não
contabilizando a variação das componentes horizontais dessa acção
Por último, estabelecendo a comparação dos valores obtidos da análise sísmica para a secção da
base do pilar nos três exemplos, entre o método desenvolvido, o método de sobreposição modal
CQC e o MN aplicado a sismos aleatórios, verificou-se que os resultados obtidos do método
desenvolvido revelaram-se algo conservativos em termos de valores máximos comparando com
estes dois métodos.
7.4 Desenvolvimentos Futuros
Um estudo importante recai sobre a definição da matriz de amortecimento. Certamente têm sido
desenvolvidos estudos sobre tal, sendo no entanto importante sustentar certas opções realizadas
no método proposto.
Seria importante de futuro estudar com mais profundidade, a relação entre o valor esperado
máximo de um processo e o seu valor esperado médio, factor determinante na definição da
resposta máxima de uma estrutura dada uma acção estocástica.
Tendo sido feito estudo para estruturas porticadas, seria interessante aplicar o método a outro tipo
de estruturas: estruturas mistas pórtico-parede, estruturas parede, estruturas com diferente
composição…
Algo que poderia ser interessante, seria estudar a importância da aplicação do método em que a
acção não parta do repouso, comparando os resultados com os aqui obtidos.
A título de curiosidade, teria algum interesse aplicar este método aos sismos definidos no
Eurocódigo 8, no entanto seria necessário obter as funções de densidade espectral de potência de
aceleração a partir dos espectros de resposta tal como descrito em (Guerreiro, 1997).

117
Referências Bibliográficas
Azevedo, Á. (2003). Método dos Elementos Finitos 1ª edição. Porto: FEUP.
Azevedo, J. (1996). Vibrações Aleatórias, Dinâmica Estocástica. Lisboa: IST.
Azevedo, J., & Proença, J. (1991). Dinâmica de Estruturas. Lisboa: IST.
Azevedo, J., & Proença, J. (1999). Identificação Dinâmica de Sistemas Estruturais. Lisboa.
Castro, L. (2009). Método dos Elementos Finitos: Análise de Pórticos Planos. Lisboa: IST.
Clough, R., & Penzien, J. (1995). Dynamics of Structures 3rd Edition. USA: Computers &
Structures.
Eurocódigo 8: Projecto de estruturas para resistência aos sismos. (2009).
Ferreira, E. (2009). Dissertação para Obtenção do grau de Mestre em Engenharia Civil "Análise
Sísmica de Estruturas Porticadas: Determinação da Interacção de Esforços". Lisboa: IST.
Freitas, J. (2009). Introdução ao Método dos Elementos Finitos: Estruturas Articuladas. Lisboa:
IST.
Guerreiro, L. (1997). Dissertação de Doutouramento "Isolamento Sísmico de Edifícios". Lisboa:
DECivil IST.
Guerreiro, L. (1999). Revisão de Análise Modal de Análise Sísmica por Espectro de Resposta.
Lisboa: IST.
Ravara, A. (1969). Dinâmica de Estruturas. Lisboa: LNEC.
Regulamento de Segurança e Acções, Decreto de Lei nº 235/83. (1983). Porto Editora.
Santos, P. (2008). Dissertação para obtenção do Grau de Mestre em Engenharia Civil "Soluções
Compatíveis e Soluções Equilibradas em Análise Dinâmica: Aplicação no Domínio do tempo a
Estruturas Porticadas". Lisboa: IST.



i
Anexos
i. Definição da Estrutura
a) Pórtico Regular de 1 piso
global Seccao
If (~Definida)
MacroNos(1) = struct('coords', [ 0.; 0.; 0.], 'incid', [ -1, -1, -1, -1, -1, -1], 'M',
[ 0, 0, 0, 0, 0, 0]);
MacroNos(2) = struct('coords', [ 6.; 0.; 0.], 'incid', [ -1, -1, -1, -1, -1, -1], 'M',
[ 0, 0, 0, 0, 0, 0]);
MacroNos(3) = struct('coords', [ 0.; 6.; 0.], 'incid', [ -1, -1, -1, -1, -1, -1], 'M',
[ 0, 0, 0, 0, 0, 0]);
MacroNos(4) = struct('coords', [ 6.; 6.; 0.], 'incid', [ -1, -1, -1, -1, -1, -1], 'M',
[ 0, 0, 0, 0, 0, 0]);
MacroNos(5) = struct('coords', [ 0.; 0.; 3.5], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [ 0,
0, 0, 0, 0, 0]);
MacroNos(6) = struct('coords', [ 6.; 0.; 3.5], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [0,
0, 0, 0, 0, 0]);
MacroNos(7) = struct('coords', [ 0.; 6.; 3.5], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [ 0,
0, 0, 0, 0, 0]);
MacroNos(8) = struct('coords', [ 6.; 6.; 3.5], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [0,
0, 0, 0, 0, 0]);
napoios=4;
n=10;
MacroBarras(1)=struct('L',0,'Sec',1, 'ni', 1, 'nf', 5, 'aux', [0, 1, 0]);
MacroBarras(2)=struct('L',0,'Sec',1, 'ni', 2, 'nf', 6 , 'aux', [0, 1, 0]);
MacroBarras(3)=struct('L',0,'Sec',1, 'ni', 3, 'nf', 7 , 'aux', [0, 1, 0]);
MacroBarras(4)=struct('L',0,'Sec',1, 'ni', 4, 'nf', 8 , 'aux', [0, 1, 0]);
MacroBarras(5)=struct('L',0,'Sec',2, 'ni', 5, 'nf', 6 , 'aux', [0, 0, 1]);
MacroBarras(6)=struct('L',0,'Sec',2, 'ni', 5, 'nf', 7 , 'aux', [0, 0, 1]);
MacroBarras(7)=struct('L',0,'Sec',2, 'ni', 6, 'nf', 8 , 'aux', [0, 0, 1]);
MacroBarras(8)=struct('L',0,'Sec',2, 'ni', 7, 'nf', 8 , 'aux', [0, 0, 1]);
ii
%betão C25/30
b=0.3; h=0.6;
E=31e9;
rho=25e3/9.8; %
G=E/2.4; % 200e9 30e3
sobrecarga = 40e3/9.8;
Seccao(1) = struct('EI1', E*b*h^3/12, 'EI2', E*h*b^3/12, 'EA', E*b*h, 'GJ', G*h*b^3/3,
'rhoA', rho*b*h);
Seccao(2) = struct('EI1', E*b*h^3/12, 'EI2', E*b^3*h/12, 'EA', E*b*h, 'GJ', G*h*b^3/3,
'rhoA', rho*b*h + sobrecarga);
Seccao(3) = struct('EI1', E*h^3*h/12, 'EI2', E*h^3*h/12, 'EA', E*h*h, 'GJ', G*h*h^3/3,
'rhoA', rho*h*h);
GerarEstrutura(MacroNos, MacroBarras, n);
maxf = 20;
nsteps = 2^11;
deltaf = maxf/nsteps;
% medir_x = [1;1]; % Base do pilar
else
f0 = zeros(desl,1);
medir = Nos(5).incid(1); % Desl seg x no topo do pilar da esquerda
escala=1;
end
b) Pórtico Regular de 1 piso
global Seccao
if (~Definida)
MacroNos(1) = struct('coords', [ 0.; 0.; 0.], 'incid', [ -1, -1, -1, -1, -1, -1], 'M',
[ 0, 0, 0, 0, 0, 0]);
MacroNos(2) = struct('coords', [ 6.; 0.; 0.], 'incid', [ -1, -1, -1, -1, -1, -1], 'M',
[ 0, 0, 0, 0, 0, 0]);
MacroNos(3) = struct('coords', [ 0.; 6.; 0.], 'incid', [ -1, -1, -1, -1, -1, -1], 'M',
[ 0, 0, 0, 0, 0, 0]);
MacroNos(4) = struct('coords', [ 6.; 6.; 0.], 'incid', [ -1, -1, -1, -1, -1, -1], 'M',
[ 0, 0, 0, 0, 0, 0]);
MacroNos(5) = struct('coords', [ 0.; 0.; 3.5], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [ 0,
0, 0, 0, 0, 0]);
iii
MacroNos(6) = struct('coords', [ 6.; 0.; 3.5], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [ 0,
0, 0, 0, 0, 0]);
MacroNos(7) = struct('coords', [ 0.; 6.; 3.5], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [ 0,
0, 0, 0, 0, 0]);
MacroNos(8) = struct('coords', [ 6.; 6.; 3.5], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [ 0,
0, 0, 0, 0, 0]);
MacroNos(9) = struct('coords', [ 0.; 0.; 7], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [ 1, 1,
1, 0, 0, 0]*0);
MacroNos(10) = struct('coords', [ 6.; 0.; 7], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [ 0,
0, 0, 0, 0, 0]);
MacroNos(11) = struct('coords', [ 0.; 6.; 7], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [ 0,
0, 0, 0, 0, 0]);
MacroNos(12) = struct('coords', [ 6.; 6.; 7], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [ 0,
0, 0, 0, 0, 0]);
napoios=4;
n=10;
MacroBarras(1)=struct('L',0,'Sec',1, 'ni', 1, 'nf', 5, 'aux', [0, 1, 0]);
MacroBarras(2)=struct('L',0,'Sec',1, 'ni', 2, 'nf', 6 , 'aux', [0, 1, 0]);
MacroBarras(3)=struct('L',0,'Sec',1, 'ni', 3, 'nf', 7 , 'aux', [0, 1, 0]);
MacroBarras(4)=struct('L',0,'Sec',1, 'ni', 4, 'nf', 8 , 'aux', [0, 1, 0]);
MacroBarras(5)=struct('L',0,'Sec',2, 'ni', 5, 'nf', 6 , 'aux', [0, 0, 1]);
MacroBarras(6)=struct('L',0,'Sec',2, 'ni', 5, 'nf', 7 , 'aux', [0, 0, 1]);
MacroBarras(7)=struct('L',0,'Sec',2, 'ni', 6, 'nf', 8 , 'aux', [0, 0, 1]);
MacroBarras(8)=struct('L',0,'Sec',2, 'ni', 7, 'nf', 8 , 'aux', [0, 0, 1]);
MacroBarras(9)=struct('L',0,'Sec',1, 'ni', 5, 'nf', 9, 'aux', [0, 1, 0]);
MacroBarras(10)=struct('L',0,'Sec',1, 'ni',6, 'nf', 10 , 'aux', [0, 1, 0]);
MacroBarras(11)=struct('L',0,'Sec',1, 'ni', 7, 'nf', 11 , 'aux', [0, 1, 0]);
MacroBarras(12)=struct('L',0,'Sec',1, 'ni', 8, 'nf', 12 , 'aux', [0, 1, 0]);
MacroBarras(13)=struct('L',0,'Sec',2, 'ni', 9, 'nf', 10 , 'aux', [0, 0, 1]);
MacroBarras(14)=struct('L',0,'Sec',2, 'ni', 9, 'nf', 11 , 'aux', [0, 0, 1]);
MacroBarras(15)=struct('L',0,'Sec',2, 'ni', 10, 'nf', 12 , 'aux', [0, 0, 1]);
MacroBarras(16)=struct('L',0,'Sec',2, 'ni', 11, 'nf', 12 , 'aux', [0, 0, 1]);
%betão C25/30
b=0.3; h=0.6;
E=31e9;
rho=25e3/9.8; %
iv
G=E/2.4; % 200e9
sobrecarga = 40e3/9.8;
Seccao(1) = struct('EI1', E*b*h^3/12, 'EI2', E*h*b^3/12, 'EA', E*b*h, 'GJ', G*h*b^3/3,
'rhoA', rho*b*h);
Seccao(2) = struct('EI1', E*b*h^3/12, 'EI2', E*b^3*h/12, 'EA', E*b*h, 'GJ', G*h*b^3/3,
'rhoA', rho*b*h + sobrecarga);
Seccao(3) = struct('EI1', E*h^3*h/12, 'EI2', E*h^3*h/12, 'EA', E*h*h, 'GJ', G*h*h^3/3,
'rhoA', rho*h*h);
GerarEstrutura(MacroNos, MacroBarras, n);
maxf = 20;
nsteps = 2^11;
deltaf = maxf/nsteps;
medir_x = [1;1]; % Base do pilar
else
f0 = zeros(desl,1);
medir = Nos(5).incid(1); % Desl seg x no topo do pilar da esquerda
escala=1;
end
c) Pórtico Irregular
global Seccao
if (~Definida)
MacroNos(1) = struct('coords', [ 0.; 0.; 0.], 'incid', [ -1, -1, -1, -1, -1, -1], 'M',
[ 0, 0, 0, 0, 0, 0]);
MacroNos(2) = struct('coords', [ 6.; 0.; 0.], 'incid', [ -1, -1, -1, -1, -1, -1], 'M',
[ 0, 0, 0, 0, 0, 0]);
MacroNos(3) = struct('coords', [ 0.; 6.; 0.], 'incid', [ -1, -1, -1, -1, -1, -1], 'M',
[ 0, 0, 0, 0, 0, 0]);
MacroNos(4) = struct('coords', [ 6.; 6.; 0.], 'incid', [ -1, -1, -1, -1, -1, -1], 'M',
[ 0, 0, 0, 0, 0, 0]);
MacroNos(5) = struct('coords', [ 0.; 0.; 3.5], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [ 0,
0, 0, 0, 0, 0]);
v
MacroNos(6) = struct('coords', [ 6.; 0.; 3.5], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [
25000, 25000, 25000, 0, 0, 0]);
MacroNos(7) = struct('coords', [ 0.; 6.; 3.5], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [ 0,
0, 0, 0, 0, 0]);
MacroNos(8) = struct('coords', [ 6.; 6.; 3.5], 'incid', [ 0, 0, 0, 0, 0, 0], 'M', [
25000, 25000, 25000, 0, 0, 0]);
napoios=4;
n=10;
MacroBarras(1)=struct('L',0,'Sec',1, 'ni', 1, 'nf', 5, 'aux', [1, 0, 0]);
MacroBarras(2)=struct('L',0,'Sec',1, 'ni', 2, 'nf', 6 , 'aux', [0, 1, 0]);
MacroBarras(3)=struct('L',0,'Sec',1, 'ni', 3, 'nf', 7 , 'aux', [1, 0, 0]);
MacroBarras(4)=struct('L',0,'Sec',1, 'ni', 4, 'nf', 8 , 'aux', [0, 1, 0]);
MacroBarras(5)=struct('L',0,'Sec',2, 'ni', 5, 'nf', 6 , 'aux', [0, 0, 1]);
MacroBarras(6)=struct('L',0,'Sec',2, 'ni', 5, 'nf', 7 , 'aux', [0, 0, 1]);
MacroBarras(7)=struct('L',0,'Sec',2, 'ni', 6, 'nf', 8 , 'aux', [0, 0, 1]);
MacroBarras(8)=struct('L',0,'Sec',2, 'ni', 7, 'nf', 8 , 'aux', [0, 0, 1]);
%betão C25/30
b=0.3; h=0.6;
E=31e9;
rho=25e3/9.8; %
G=E/2.4; % 200e9 30e3
sobrecarga = 40e3/9.8;
Seccao(1) = struct('EI1', E*b*h^3/12, 'EI2', E*h*b^3/12, 'EA', E*b*h, 'GJ', G*h*b^3/3,
'rhoA', rho*b*h);
Seccao(2) = struct('EI1', E*b*h^3/12, 'EI2', E*b^3*h/12, 'EA', E*b*h, 'GJ', G*h*b^3/3,
'rhoA', rho*b*h + sobrecarga);
Seccao(3) = struct('EI1', E*h^3*h/12, 'EI2', E*h^3*h/12, 'EA', E*h*h, 'GJ', G*h*h^3/3,
'rhoA', rho*h*h);
GerarEstrutura(MacroNos, MacroBarras, n);
maxf = 20;
nsteps = 2^11;
deltaf = maxf/nsteps;
vi
medir_x = [1;1]; % Base do pilar
else
f0 = zeros(desl,1);
medir = Nos(5).incid(1); % Desl seg x no topo do pilar da esquerda
escala=1;
end
ii. Geração da Estrutura
function [] = GerarEstrutura(MacroNos, MacroBarras, ndiv)
global Nos Barras
global nnos nbarras
mnos = size(MacroNos,2);
mbarras = size(MacroBarras,2);
for n = 1:mnos
Nos(n) = MacroNos(n);
end
nnos = mnos + mbarras*(ndiv-1);
nbarras = mbarras*ndiv;
% Vamos criar: Nos -> mbarras*(ndiv-1) novos
% Barras -> mbarras*ndiv no total
Nos(mnos+mbarras*(ndiv-1)).coords = Nos(mnos).coords;
Barras(mbarras*ndiv) = struct('L',0,'Sec',0, 'ni', 0, 'nf', 0, 'aux', [0, 0, 0]);
newn = 0;
newb = 0;
startnode = mnos;
vii
for b = 1:mbarras
dx = (MacroNos(MacroBarras(b).nf).coords - MacroNos(MacroBarras(b).ni).coords)/ndiv;
for n = 2:ndiv
coord = MacroNos(MacroBarras(b).ni).coords + dx*(n-1);
newn = newn + 1;
Nos(mnos+newn) = struct('coords', coord, 'incid', [ 0 0 0 0 0 0], ...
'M', [ 0, 0, 0, 0, 0, 0]);
end
if (ndiv == 1)
newb = newb + 1;
Barras(newb) = MacroBarras(b);
else
newb = newb + 1;
startnode = startnode + 1;
Barras(newb) = MacroBarras(b);
Barras(newb).nf = startnode;
for n = 1:ndiv-2
newb = newb + 1;
startnode = startnode + 1;
Barras(newb) = MacroBarras(b);
Barras(newb).ni = startnode-1;
Barras(newb).nf = startnode;
end
newb = newb + 1;
Barras(newb) = MacroBarras(b);
Barras(newb).ni = startnode;
end
end
iii. Frequências Próprias, Modos de Vibração e Obtenção dos Esforços
pelo MEF
FNull = inline('[ 0; 0; 0]','t');
viii
global nnos nbarras
% Declarar barras
global Barras
Barras = struct('L', 0, 'Sec', 0, 'ni', 0, 'nf', 0, 'aux', []);
% Declarar seccoes
global Seccao
Seccao = struct('EI1', 0, 'EI2', 0, 'EA', 0, 'GJ', 0, 'rhoA', 0);
% Declarar nos
global Nos
Nos = struct('coords', [], 'incid', [], 'M', []);
Definida = false;
% Definir a estrutura
EstName = 'Portico3d'
% EstName = 'Portico_2pisos';
%EstName = 'consola';
% Fim das definicoes
eval(EstName);
Definida = true;
% --------------------------------------------------------------
% Atribuir deslocamentos aos nos
desl = 0;
for n = 1:length(Nos) % Todos os nos
for m = 1:6 % Todas as direccoes do no
if (Nos(n).incid(m) < 0)
Nos(n).incid(m) = 0;
ix
else
desl = desl + 1;
Nos(n).incid(m) = desl;
end
end
end
% --------------------------------------------------------------
% Calcular matriz das massas nodais
Mg = zeros(desl);
for n = 1:length(Nos)
for m = 1:6
i = Nos(n).incid(m);
if (i > 0)
Mg(i,i) = Nos(n).M(m);
end
end
end
% --------------------------------------------------------------
% Inicializar a matriz de rigidez global a zero
Kg = zeros(desl);
% --------------------------------------------------------------
% Calcular as matrizes globais barra a barra
for b=1:length(Barras)
e3 = Nos(Barras(b).nf).coords - Nos(Barras(b).ni).coords;
L = sqrt(sum(e3.^2));
e3 = e3'/L;
e1 = cross(Barras(b).aux,e3);
n1 = sqrt(sum(e1.^2));
e1 = e1/n1;
e2 = cross(e3,e1);
x
EAL = Seccao(Barras(b).Sec).EA/L;
EI1L = Seccao(Barras(b).Sec).EI1/L;
EI1L2 = EI1L/L;
EI1L3 = EI1L2/L;
EI2L = Seccao(Barras(b).Sec).EI2/L;
EI2L2 = EI2L/L;
EI2L3 = EI2L2/L;
GJL = Seccao(Barras(b).Sec).GJ/L;
kb = zeros(12,12);
kb([3,9],[3,9]) = EAL* [ 1, -1; -1, 1];
kb([6,12],[6,12]) = GJL* [ 1, -1; -1, 1];
kb([1,5,7,11],[1,5,7,11]) = ...
[12*EI2L3, 6*EI2L2, -12*EI2L3, 6*EI2L2;...
6*EI2L2, 4*EI2L, -6*EI2L2, 2*EI2L;...
-12*EI2L3, -6*EI2L2, 12*EI2L3, -6*EI2L2;...
6*EI2L2, 2*EI2L, -6*EI2L2, 4*EI2L];
kb([2,4,8,10],[2,4,8,10]) = ...
[ 12*EI1L3, -6*EI1L2, -12*EI1L3, -6*EI1L2;...
-6*EI1L2, 4*EI1L, 6*EI1L2, 2*EI1L;...
-12*EI1L3, 6*EI1L2, 12*EI1L3, 6*EI1L2;...
-6*EI1L2, 2*EI1L, 6*EI1L2, 4*EI1L];
rL = Seccao(Barras(b).Sec).rhoA*L/420;
rL2 = rL*L;
rL3 = rL2*L;
mb = zeros(12,12);
mb([3,9],[3,9]) = rL*[140, 70; 70, 140];
% mb([6,12],[6,12]) = ;
mb([1,5,7,11],[1,5,7,11]) = ...
[ 156*rL, 22*rL2, 54*rL, -13*rL2;
22*rL2, 4*rL3, 13*rL2, -3*rL3; ...
54*rL, 13*rL2, 156*rL, -22*rL2; ...
-13*rL2, -3*rL3, -22*rL2, 4*rL3];
xi
mb([2,4,8,10],[2,4,8,10]) = ...
[ 156*rL, -22*rL2, 54*rL, 13*rL2;
-22*rL2, 4*rL3, -13*rL2, -3*rL3; ...
54*rL, -13*rL2, 156*rL, 22*rL2; ...
13*rL2, -3*rL3, 22*rL2, 4*rL3];
% Rodar kb
Tn=[e1 ; e2 ; e3];
T=[Tn, zeros(3,9); ...
zeros(3,3), Tn, zeros(3,6); ...
zeros(3,6), Tn, zeros(3,3); ...
zeros(3,9), Tn ];
tkt=T'*kb*T;
tmt=T'*mb*T;
% Espalhar
inc = [Nos(Barras(b).ni).incid,Nos(Barras(b).nf).incid];
incl = (inc>0);
incr = inc(incl);
Kg(incr,incr) = Kg(incr,incr) + tkt(incl,incl);
Mg(incr,incr) = Mg(incr,incr) + tmt(incl,incl);
if (b==medir_x(1))
incl_x = incl;
incr_x = incr;
k_x = kb*T;
end
end
% Kg\[0,0,0,1000,-1000,0,zeros(1,15)]'
% pause
[vects, vals] = eig(Kg, Mg);
[vals, ord] = sort(diag(vals));
xii
vects=vects(:,ord);
f = sqrt(vals);
f(:)
f1= f(1);
f2= f(2);
% x= [1/f1,f1;1/f2,f2]\[0.01; 0.01];
x= [1/f1,f1;1/f2,f2]\[0.1; 0.1];
x= [1/f1,f1;1/f2,f2]\[0.02; 0.02];
x= [1/f1,f1;1/f2,f2]\[0.05; 0.05];
% ou seja alfa = x(1); beta = x(2)
x(1)
x(2)
Cg = x(1)*Mg + x(2)*Kg;
% Definir forcas, intervalo, etc
% Chama-se de novo a funcao EstName
eval(EstName);
DrawModes();
% Solu��o "analitica"
mindir=0;
maxdir=pi;
deltadir = pi/18;
% ndirs=(maxdir-mindir)/deltadir;
fs = 0:deltaf:(maxf-deltaf);
nfs = size(fs,2);
dirs = mindir:deltadir:maxdir;
ndirs = size(dirs,2);
xiii
ds = zeros(nfs,ndirs);
xs = zeros(12, nfs, ndirs);
DM = diag(vects'*Mg*vects);
DC = diag(vects'*Cg*vects);
DK = diag(vects'*Kg*vects);
for idir = 1:ndirs;
dir = dirs(idir);
f0(1:6:desl,1) = cos(dir)*ones((nnos-napoios),1);
f0(2:6:desl,1) = sin(dir)*ones((nnos-napoios),1);
F0 = Mg*f0;
for i=1:nfs
w = 2*pi*fs(i);
VF = vects'*F0;
u02 = vects*(VF./(-w^2*DM + 1i*w*DC + DK));
ds(i, idir) = u02(medir);
xs(:,i, idir) = k_x(:,incl_x)*u02(incr_x);
end
end
Desenho dos Modos de Vibração
function [ xx ] = Deformada(modo, escala)
% --------------------------------------------------------------
global Barras
global Nos
nsteps = 10;
xx = zeros(3, length(Barras)*(nsteps+2));
for b = 1:length(Barras)
% Matriz de rotacao
xiv
e3 = Nos(Barras(b).nf).coords - Nos(Barras(b).ni).coords;
L = sqrt(sum(e3.^2));
e3 = e3'/L;
e1 = cross(Barras(b).aux,e3);
n1 = sqrt(sum(e1.^2));
e1 = e1/n1;
e2 = cross(e3,e1);
Tn=[e1 ; e2 ; e3];
T=[Tn, zeros(3,9); ...
zeros(3,3), Tn, zeros(3,6); ...
zeros(3,6), Tn, zeros(3,3); ...
zeros(3,9), Tn ];
% Deslocamentos dos nos da barra
incn = [ Nos(Barras(b).ni).incid, Nos(Barras(b).nf).incid];
incl = incn > 0;
incr = incn(incl);
db = zeros(12,1);
db(incl) = modo(incr);
% Rodados para o referencial da barra
db = T*db;
% Coordenadas dos pontos onde se faz o desenho
x=(0:1/nsteps:1)*L;
% Funcoes de forma
f3 = 1-(3.*x.^2)/L^2+(2.*x.^3)/L^3;
f1 = -x+(2.*x.^2)/L-x.^3/L^2;
f4 = +(3.*x.^2)/L^2-(2.*x.^3)/L^3;
f2 = +(x.^2/L)-x.^3/L^2;
% Deslocamentos nos pontos de desenho
dx = [ ...
-f1*db(5)-f2*db(11)+f3*db(1)+f4*db(7); ...
xv
f1*db(4)+f2*db(10)+f3*db(2)+f4*db(8);...
(1-x/L)*db(3)+x/L*db(9)];
% No referencial global
dx = Tn'*dx;
xi = Nos(Barras(b).ni).coords';
xf = Nos(Barras(b).nf).coords';
xfxi = (xf-xi)/L;
pos = (b-1)*(nsteps+2)+1;
xx(:, pos+(0:nsteps)) = (xi'*ones(1,nsteps+1) + xfxi'*x) + dx*escala;
xx(:, pos+nsteps+1) = [NaN; NaN; NaN];
end
maxxyz = -[1 1 1]*1e8;
minxyz = -maxxyz;
for mode=1:min(desl,12)
h(mode) = subplot(3,4,mode);
xx = Deformada(vects(:,mode), escala);
plot3(xx(1,:), xx(2,:), xx(3,:));
title(['f=' num2str(f(mode)/(2*pi)) 'Hz']);
maxxyz = max(maxxyz, max(xx,[],2)');
minxyz = min(minxyz, min(xx,[],2)');
axis equal;
axis vis3d;
end
% para desenhar
hlink = linkprop(h,{'CameraPosition','CameraUpVector',...
'CameraTarget','CameraViewAngle', ...
'XLim','YLim','ZLim','DataAspectRatio','visible'});
key = 'graphics_linkprop';
setappdata(h(1),key,hlink);
set(h(1),'DataAspectRatio',[1 1 1], ...

xvi
'XLim',[minxyz(1) maxxyz(1)], 'YLim',[minxyz(2) maxxyz(2)], ...
'ZLim',[minxyz(3) maxxyz(3)], 'visible','on');
drawnow;
iv. Determinação das Superfícies de Interacção
acels_rsa = [ 0 0 220 300 300 130 40 16 ]*10^-4;
%acels_rsa = [ 1 1 1 1 1 1 1 ];
freqs_rsa = [ 0 0.030 0.900 1.800 3.600 7.200 14.400 20.000 ];
% ndirsphi=20;
% ndirsteta=20*4;
minphi=0;
maxphi=pi/2;
deltaphi = (pi/100);
ndirsphi=round((maxphi-minphi)/deltaphi);
phis = minphi:deltaphi:maxphi;
minteta = 0;
maxteta = 2*pi;
deltateta = (pi/200);
ndirsteta=round((maxteta-minteta)/deltateta);
tetas = minteta:deltateta:maxteta;
max_espectro = 20; % Por causa do rsa
nfreqs = fix(max_espectro/deltaf);
% primeiro indice - phi ; segundo indice - teta
XM1 = zeros(2*ndirsphi+1,ndirsteta, ndirs);
xvii
XM2 = zeros(2*ndirsphi+1,ndirsteta, ndirs);
XN = zeros(2*ndirsphi+1,ndirsteta, ndirs);
start = 1;
last = nfreqs;
%pedir = 4.2;
%start = fix(pedir/deltaf) + 1;
%last = start;
freqs = ((start:last)-0.5)*deltaf;
sa2 = interp1(freqs_rsa, acels_rsa, freqs);
factmaxN=zeros(1,ndirs);
factmaxM1=zeros(1,ndirs);
factmaxM2=zeros(1,ndirs);
%considerar a direc��o 1
EI1 = Seccao(Barras(medir_x(1)).Sec).EI1;
EI2 = Seccao(Barras(medir_x(1)).Sec).EI2;
EA = Seccao(Barras(medir_x(1)).Sec).EA;
for idir = 1:1:ndirs;
dirsismo = idir;
sa2HM12 =
sa2.*(conj(xs(4+offset_x,start:last,dirsismo)).*xs(4+offset_x,start:last,dirsismo));
sa2HM22 =
sa2.*(conj(xs(5+offset_x,start:last,dirsismo)).*xs(5+offset_x,start:last,dirsismo));
sa2HN2 =
sa2.*(conj(xs(3+offset_x,start:last,dirsismo)).*xs(3+offset_x,start:last,dirsismo));
m0N = 0;
m0M1 = 0;
m0M2 = 0;
xviii
m2N = 0;
m2M1 = 0;
m2M2 = 0;
integralM1= 0;
integralM2= 0;
integralN = 0;
sumAbsM = 0;
for i = start:last
dm0N = abs(sa2HN2(i));
dm0M1 = abs(sa2HM12(i));
dm0M2 = abs(sa2HM22(i));
m0N=m0N+dm0N*deltaf;
m0M1=m0M1+dm0M1*deltaf;
m0M2=m0M2+dm0M2*deltaf;
m2N=m2N+dm0N*deltaf*(freqs(i))^2;
m2M1=m2M1+dm0M1*deltaf*(freqs(i))^2;
m2M2=m2M2+dm0M2*deltaf*(freqs(i))^2;
integralM1 = integralM1 + sa2HM12(i)*deltaf;
integralM2 = integralM2 + sa2HM22(i)*deltaf;
integralN = integralN + sa2HN2(i)*deltaf;
if (integralM1 > 0 && integralM2 > 0 && integralN > 0)
saHM1 = sa2HM12(i)/(2*sqrt(integralM1));
xix
saHM2 = sa2HM22(i)/(2*sqrt(integralM2));
saHN = sa2HN2(i)/(2*sqrt(integralN));
alfaM1 = saHM1/abs(xs(4+offset_x,i,dirsismo));
alfaM2 = saHM2/abs(xs(5+offset_x,i,dirsismo));
alfaN = saHN/abs(xs(3+offset_x,i,dirsismo));
alfa = max([ alfaM1, alfaM2, alfaN]);
am1(i) = alfaM1;
am2(i) = alfaM2;
an(i) = alfaN;
Ni = xs(3+offset_x,i,dirsismo)*alfaN*deltaf;
M1i = xs(4+offset_x,i,dirsismo)*alfaM1*deltaf;
M2i = xs(5+offset_x,i,dirsismo)*alfaM2*deltaf;
for iphi=1:1:(ndirsphi+1);
phi= phis(iphi);
cN = sin(phi);
for iteta=1:1:ndirsteta;
teta = tetas(iteta);
cM2 = cos(phi)*sin(teta);
cM1 = cos(phi)*cos(teta);
X = M1i*cM1 + M2i*cM2 + Ni*cN;
if (abs(X) > 1e-2)
s = -imag(X)/abs(X);
c = real(X)/abs(X);
XM1(iphi,iteta,dirsismo) = XM1(iphi,iteta,dirsismo) + real(M1i)*c -
imag(M1i)*s;
XM2(iphi,iteta,dirsismo) = XM2(iphi,iteta,dirsismo) + real(M2i)*c -
imag(M2i)*s;
XN(iphi,iteta,dirsismo) = XN(iphi,iteta,dirsismo) + real(Ni)*c -
imag(Ni)*s;
xx
end
end
end
end
end
t=10;
npassagensN=sqrt(m2N/m0N)*t;
npassagensM1=sqrt(m2M1/m0M1)*t;
npassagensM2=sqrt(m2M2/m0M2)*t;
factmaxN(dirsismo)=sqrt((2*log(npassagensN)))+0.5772/(sqrt((2*log(npassagensN))));
factmaxM1(dirsismo)=sqrt((2*log(npassagensM1)))+0.5772/(sqrt((2*log(npassagensM1))));
factmaxM2(dirsismo)=sqrt((2*log(npassagensM2)))+0.5772/(sqrt((2*log(npassagensM2))));
XM1(:,:,dirsismo) = factmaxM1(dirsismo)*XM1(:,:,dirsismo);
XM2(:,:,dirsismo) = factmaxM2(dirsismo)*XM2(:,:,dirsismo);
XN(:,:,dirsismo) = factmaxN(dirsismo)*XN(:,:,dirsismo);
end
% % primeiro e segundo quadrantes
%
iphi=1:ndirsphi;
iteta=1:(ndirsteta/2);
XM1(2*ndirsphi+2-iphi,iteta+2*ndirsteta/4,1:ndirs) = -XM1(iphi,iteta,1:ndirs);
XM2(2*ndirsphi+2-iphi,iteta+2*ndirsteta/4,1:ndirs) = -XM2(iphi,iteta,1:ndirs);
XN(2*ndirsphi+2-iphi,iteta+2*ndirsteta/4,1:ndirs) = -XN(iphi,iteta,1:ndirs);
%
% %terceiro e quarto quadrantes
%
XM1(2*ndirsphi+2-iphi,iteta,1:ndirs) = -XM1(iphi,iteta+2*ndirsteta/4,1:ndirs);
XM2(2*ndirsphi+2-iphi,iteta,1:ndirs) = -XM2(iphi,iteta+2*ndirsteta/4,1:ndirs);
XN(2*ndirsphi+2-iphi,iteta,1:ndirs) = -XN(iphi,iteta+2*ndirsteta/4,1:ndirs);
xxi
x=reshape(XM1, prod(size(XM1)), 1);
y=reshape(XM2, prod(size(XM2)), 1);
z=reshape(XN, prod(size(XN)), 1);
scatter3(x,y,z)
% k=convhulln([x y z]);
% trisurf(k,x,y,z)
xlabel('M1')
ylabel('M2')
zlabel('N')
v. Simulação através do Método de Newmark
% % definir beta e gamma e passo de integracao
beta = 1/4;
gamma = 1/2;
%
% % definir Newmark
Nmk = Mg + gamma*dt*Cg + beta*dt*dt*Kg;
iNmk = inv(Nmk);
%
k1 = (1-gamma)*dt;
k2 = (0.5-beta)*dt*dt;
k3 = gamma*dt;
k4 = beta*dt*dt;
M0 = sparse(-Kg);
M1 = sparse(-Kg*dt - Cg);
M2 = sparse(-Kg*k2 - Cg*k1);
eval(EstName);
maxN = zeros(ndirs,1);
maxM1 = maxN;
maxM2 = maxN;
xxii
for idir = 1:ndirs;
dir = dirs(idir);
f0(1:6:desl,1) = cos(dir)*ones((nnos-napoios),1);
f0(2:6:desl,1) = sin(dir)*ones((nnos-napoios),1);
nsismos=1;
sismos=1:nsismos;
Nmax = zeros(nsismos,1);
M1max = Nmax;
M2max = Nmax;
for isismo = 1:nsismos;
sismo = sismos(isismo);
u = zeros(desl,1);
du=u;
ddu=u;
gerar_sismo();
% Solu�ao com Newmark+fft
i = 1;
dt1 = 0;
d = zeros(desl, nsteps);
x = zeros(12, nsteps);
while (i < nsteps)
dt1 = dt1 + dt;
i = i+1;
f = Mg*f0*fe(i)+ M0*u + M1*du + M2*ddu;
ddu1 = iNmk*f;
du1 = du + k1*ddu + k3*ddu1;
u1 = u + du*dt + k2*ddu + k4*ddu1;
xxiii
d(:,i) = u1;
x(:,i) = k_x(:,incl_x)*u1(incr_x);
u = u1;
du = du1;
ddu = ddu1;
end
Nmax(isismo) = max(abs(x(3+offset_x,:)));
M1max(isismo) = max(abs(x(4+offset_x,:)));
M2max(isismo) = max(abs(x(5+offset_x,:)));
end
maxN(idir) = mean(Nmax);
maxM1(idir) = mean(M1max);
maxM2(idir) = mean(M2max);
end
Geração do Sismo
dt=t/nsteps;
dti=0:dt:(t-dt);
A = sqrt(2*sa2*deltaf);
%sismo 1
fe=0;
fi=2*pi*rand(nfreqs,1);
for i=start:last;
fx=A(i)*sin((2*pi*freqs(i).*dti+fi(i)));
fe=fe+fx;
end
figure(1);
plot(dti,fe);