anÁlise integrada do sistema propulsivo e do...
TRANSCRIPT

Universidade Federal do Rio de Janeiro
ANÁLISE INTEGRADA DO SISTEMA PROPULSIVO E DO COMPORTAMENTO
DINÂMICO DE EMBARCAÇÕES
LILIANE ALVES DE SOUZA
2015

ii
ANÁLISE INTEGRADA DO SISTEMA PROPULSIVO E DO COMPORTAMENTO
DINÂMICO DE EMBARCAÇÕES
Liliane Alves de Souza
Projeto de Graduação
apresentado ao Curso de
Engenharia Naval e Oceânica da
Escola Politécnica, Universidade
Federal do Rio de Janeiro, como
parte dos requisitos necessários à
obtenção do título de Engenheira
Naval e Oceânica.
Orientador: Luiz Antônio Vaz Pinto
Rio de Janeiro
Agosto de 2015

iii
ANÁLISE INTEGRADA DO SISTEMA PROPULSIVO E DO COMPORTAMENTO
DINÂMICO DE EMBARCAÇÕES
Liliane Alves de Souza
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO DE
ENGENHARIA NAVAL E OCEÂNICA DA ESCOLA POLITÉCNICA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE ENGENHEIRA NAVAL E
OCEÂNICA.
Examinada por:
________________________________________________
Prof. Luiz Antônio Vaz Pinto, D. Sc.- Professor Orientador
________________________________________________
Prof. Severino Fonseca Neto, D. Sc.- Professor Associado
________________________________________________
Prof. Marta Cecília Tapia Reyes, D. Sc.- Professor Associado
________________________________________________
Ulisses A. Monteiro Barbosa – D.Sc., Professor Colaborador DENO/UFRJ
RIO DE JANEIRO, RJ - BRASIL
Agosto de 2015

iv
Souza, Liliane Alves
Análise Integrada do Sistema Propulsivo e do
Comportamento Dinâmico / Liliane Alves de Souza - Rio de
Janeiro: UFRJ / Escola Politécnica, 2015.
Orientador: Luiz Vaz Antônio Pinto
XV, p.59 :Il.; 29,7 cm
Projeto de Graduação - UFRJ / POLI / Engenharia Naval e
Oceânica, 2015.
Referências Bibliográficas: p. 58-59.
1. Apresentação 2. Decifrando a vibração em navios
3.Excitação Propulsor 4.Excitação Motor Diesel de
Propulsão Principal 5. Excitação Eixo Longitudinal
6. Resposta – Estrutura do Navio 7. Resposta –
Superestrutura 8. Ferramenta de Cálculo Desenvolvida
9.Estudo de Caso e Resultados 10. Conclusões e
Recomendações 11. Bibliografia.
I.Pinto, Luiz. II Universidade Federal do Rio de Janeiro,
UFRJ, Escola Politécnica, Curso de Engenharia Naval e
Oceânica. III. Titulo.

v
DEDICATÓRIA
À minha amada família.

vi
AGRADECIMENTOS
À Deus, Aquele que eu não tenho dúvidas que está e sempre estará ao meu
lado, por iluminar meu caminho e por ter guiado meus passos até aqui. A Nossa
Senhora Aparecida, por todas as orações desesperadas em seus pés, todas as
promessas valeram a pena.
Aos meus amados pais, Severino Leandro e Dalvanira Alves. Obrigada por
aturar minhas crises de choro, que não foram poucas ao longo desses 6 anos. Mãe,
obrigada por me acalmar todas as vezes que eu perdia a cabeça e tinha vontade de
largar tudo isso. Obrigada por ser esse exemplo de mulher, independente e guerreira,
que é o porto seguro da família toda. Obrigada por ser essa mãe companheira e
dedicada à família! Pai, obrigada por me ensinar a apreciar as coisas simples da vida.
Meu amor por vocês não tem fim.
À minha irmã, Bárbara Elisa. Obrigada por ser a irmã caçula mais brava do
mundo, mas que sempre vibra com minhas conquistas. Eu quero ser sempre seu
exemplo e sua proteção. Desculpa por atrapalhar seu sono estudando nas
madrugadas.
Ao meu irmão, Leonardo Leandro. Obrigada por tornar os meus dias mais
difíceis há 23 anos. Você é o irmão mais velho mais chato do mundo.
Aos meus familiares que sempre me incentivaram a estudar. Obrigada por me
acompanharem nessa jornada, sendo compreensíveis em ocasiões que não pude
estar presente devido aos momentos de estudo.
Agradeço aos amigos navais, com a qual convivi a maior parte da minha vida
nesses seis anos. Em especial, cito alguns que foram demasiadamente importantes:
Marcela Esteves, Carolina Ferreira, Lívia Laranjeira, Gabriel Botelho, Vinicius Veras,
Leonardo Salles, Daniel Leitão, Pedro Lund, Rafael Fachini e Felipe Teixeira – com
vocês meus dias foram mais felizes e minhas tristezas foram amenizadas!
Ao Álvaro de Lana Brandão. Obrigada por toda a paciência e por aturar todo o
meu mau humor nas semanas de prova e entregas de trabalho. Obrigada por todo
apoio e carinho em momentos que tanto precisei. Obrigada por tudo o que já fez por
mim e pra mim.

vii
Ao meu orientador, Luiz Vaz, que me apoiou e me acolheu desde a primeira
vez em que o procurei. Obrigada pelos prazos flexíveis e pela confiança depositada.
Agradeço imensamente aos professores, pesquisadores e funcionários dos
laboratórios LEME e LEDAV por toda a orientação que recebi, pela paciência e
presteza com que me acompanharam nesses últimos meses. Em especial meu co-
orientador Ulisses Monteiro.
Ao meu grande amigo e mestre, professor Severino Neto. Exemplo de pessoa
do bem, de caráter, de generosidade. Muito me ensinou ao longo desses anos. Muito
obrigada por tanto carinho, pelos abraços sinceros e por todo aprendizado. Uma honra
ter sido sua aluna e agora ser uma amiga de profissão. Não tenho palavras que
descrevam meus sentimentos. Obrigada!
À querida professora Marta Tapia. Muito obrigada pela ajuda em momentos
cruciais da minha trajetória, com palavras, afeto, e aprendizado.
Às minhas amigas, especialmente Natália Ribeiro, Bárbara Ribeiro e Adriane
Mendes. Obrigada por serem minhas amigas de sempre. Por me apoiarem e me
ensinarem o valor de uma amizade verdadeira. Amo muito vocês!
À Projemar. Empresa que me proporcionou trabalhar com pessoas
maravilhosas, que somaram muito na minha vida profissional e pessoal. Em especial,
Rodrigo Klim, Eliza Azevedo, Allan Ramos, Clarissa Maciel, Felipe Da Eira, Gelder
Guerreiro Costa, Higor Pereira, Juliana Mello, Marcos Baptista, Pedro Ivo Macedo e
Richard Carvalho... Espero que um dia possamos trabalhar juntos novamente.
Ao Programa de Recursos Humanos para o Setor de Petróleo e Gás da ANP,
através dos Programas PRH-35, pelo apoio financeiro indispensável para a realização
desse trabalho.
A todos que de alguma forma contribuíram com a realização de mais um sonho
na minha vida, meu mais sincero e grato: Muito obrigada!
“E o segredo é ter muita fé para seguir em frente, mais coragem para enfrentar
os obstáculos e a certeza de que quando nossos sonhos são movidos por amor, a
vitória não demora a chegar.”

viii
Resumo do Projeto de Graduação apresentado à Escola Politécnica / UFRJ como
parte dos requisitos necessários para a obtenção do grau de Engenheira Naval e
Oceânica.
Análise Integrada do Sistema Propulsivo e do Comportamento Dinâmico
Liliane Alves de Souza
Agosto / 2015
Orientador: Luiz Antônio Vaz Pinto
Curso: Engenharia Naval e Oceânica
O presente estudo tem como objetivo avaliar alternativas de sistemas propulsivos para
um navio (dada sua resistência total ao avanço na velocidade de serviço), segundo
diferentes critérios. Além, de possibilitar uma primeira verificação de vibração
excessiva em navios, sem a necessidade de elementos finitos. Foi desenvolvida e
verificada então uma ferramenta para esse fim.
Foram utilizadas duas embarcações que servirão de base para o estudo, uma
embarcação do tipo AHTS e uma do tipo petroleiro. Serão definidas a excitação dos
motores, linha de eixo e propulsor; e a resposta da viga navio e da superestrutura.
Bem como uma investigação da possibilidade de ressonância.
Palavras-Chave: Vibração em Navios, Propulsão, Excitação, Resposta.

ix
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Engineer.
Integrated Analysis of the Propulsion System and the Dynamic Performance
Liliane Alves de Souza
August / 2015
Advisor: Luiz Vaz Pinto
Course: Naval Architecture and Marine Engineering
This study aims to evaluate alternative propulsive systems for ship (given its total
resistance to progress in the speed of service), according to different criteria. In
addition, to allow a first check excessive vibration in ships without the need of finite
elements. It was developed, and then checked a tool for this purpose.
Two vessels were used as a basis for the study, a vessel AHTS type and a tanker type.
It will be defined the excitement of engines, shaft line and propeller; and the response
of the beam and the ship superstructure. Besides, it was investigated the possibility of
resonance.
Keywords: Ship Vibration, Propulsion, Excitation, Response.

x
Índice Geral
1. Apresentação .......................................................................................................... 1
1.1. Introdução ........................................................................................................ 1
1.2. Objetivo e Motivação ........................................................................................ 1
1.3. Metodologia ...................................................................................................... 2
2. Decifrando a vibração em navios ............................................................................ 3
2.1. O que é vibração? ............................................................................................ 3
2.1.1. Vibração Livre para Um Grau de Liberdade ............................................. 3
2.1.2. Vibração Livre para N Graus de Liberdade ............................................... 5
2.2. Como evitá-la? ................................................................................................. 9
2.2.1. Reduzir a amplitude da força excitante, F: ................................................ 9
2.2.2. Aumento de rigidez, K: .............................................................................. 9
2.2.3. Evitar razão de frequência próxima da unidade: ....................................... 9
2.2.4. Aumento de amortecimento, ζ: ............................................................... 10
2.3. Fontes de Excitação e Respostas .................................................................. 10
3. Excitação – Propulsor ............................................................................................ 13
3.1. Esteira ............................................................................................................ 13
3.2. Forças de eixo ................................................................................................ 16
3.3. Força de Pressão no Casco ........................................................................... 18
3.3.1. Impulsos de Pressão – Parcela Cavitante .............................................. 21
3.3.2. Impulsos de Pressão – Parcela Não Cavitante ....................................... 23
3.3.3. Impulsos de Pressão Total ...................................................................... 23
4. Excitação – Motor Diesel de Propulsão Principal .................................................. 24
5. Excitação – Eixo Longitudinal ................................................................................ 26
5.1. Vibração longitudinal ...................................................................................... 26
5.2. Vibração torcional ........................................................................................... 28
5.3. Vibração rotacional ......................................................................................... 29
6. Resposta – Estrutura do Navio .............................................................................. 30

xi
6.1. Vibração da Viga Navio .................................................................................. 30
6.1.1. Vibração Flexional Vertical ...................................................................... 30
6.1.2. Vibração Flexional Horizontal ................................................................. 32
6.1.3. Vibração Torcional .................................................................................. 32
6.1.4. Vibração Longitudinal .............................................................................. 32
7. Resposta – Superestrutura .................................................................................... 33
8. Ferramenta de Cálculo Desenvolvida ................................................................... 36
8.1. Aba Holtrop .................................................................................................... 36
8.2. Aba Série B .................................................................................................... 38
8.3. Aba Fontes de Excitação ............................................................................... 38
8.4. Aba Pressão Induzida na Popa ...................................................................... 39
8.5. Aba Resposta da Viga Navio ......................................................................... 39
8.6. Aba Resposta da Superestrutura ................................................................... 39
8.7. Aba Avaliação de Ressonância ...................................................................... 40
9. Estudo de Caso e Resultados ............................................................................... 41
9.1. Navio Petroleiro .............................................................................................. 41
9.1.1. Resultados – Fontes de Excitação .......................................................... 42
9.1.2. Resultados – Pressão Induzida na Popa ................................................ 43
9.1.3. Resultados – Resposta da Viga Navio .................................................... 44
9.1.4. Resultados – Resposta da Superestrutura ............................................. 44
9.1.5. Resultados – Avaliação da Ressonância ................................................ 45
9.1.6. Resultados – Comparação Elementos Finitos 1D e 3D .......................... 47
9.2. Navio AHTS .................................................................................................... 48
9.2.1. Resultados – Fontes de Excitação .......................................................... 50
9.2.2. Resultados – Pressão Induzida .............................................................. 51
9.2.3. Resultados – Resposta da Viga Navio .................................................... 52
9.2.4. Resultados – Resposta da Superestrutura ............................................. 53
9.2.5. Resultados – Avaliação da Ressonância ................................................ 53
9.2.6. Resultados – Comparações .................................................................... 55

xii
10. Conclusões e Recomendações ......................................................................... 57
11. Bibliografia ......................................................................................................... 58
xiii
Índice de Figuras
Figura 2.1 - Sistema massa-mola ................................................................................... 3
Figura 2.2 - Modo de vibração da viga-navio ................................................................. 5
Figura 2.3 – Fontes de Vibração em Navios ................................................................ 10
Figura 3.1 - Propulsor modelado no software CFX do pacote Ansys ........................... 13
Figura 3.2 – Representação da esteira de um navio - CFX do pacote Ansys .............. 14
Figura 3.3 – Folgas vante-ré - CFX do pacote Ansys ................................................... 15
Figura 3.4 - Linhas D’água sem cortes para um navio com extremas linhas cheias, com
as alterações propostas. ............................................................................................... 16
Figura 3.5- Forças e momentos agindo na pá do hélice que são transferidos ao eixo. 16
Figura 3.6 - Distribuição de carga na pá, para 4 pás diferentes ................................... 17
igura - Empuxo normali ado e momento fletor hori ontal em variações
da frequência da pá. Os valores médios e os desvios padrões; 4, 5 e 6 pás do hélice
fixados em navios convencionais de parafuso simples. ............................................... 18
Figura 3.8 – Variação do Campo de Pressões induzidas pelo Propulsor .................... 19
Figura 3.9 – Forças e Momentos mais importantes dados pelos Impulsos de Pressão
no casco ....................................................................................................................... 20
Figura 3.10 – Valores máximos, médios e mínimos das forças induzidas pelo hélice
(primeiro harmônico na frequência da pá) .................................................................... 20
Figura 3.11 - Exemplos de projeto de propulsores Bi-Hélice ....................................... 22
Figura 3.12 - Parâmetros de entrada para os cálculos dos impulsos de pressão ........ 22
Figura 4.1 - Forças e momentos atuando no alicerce do motor diesel de baixa rotação
...................................................................................................................................... 24
Figura 5.1- Original, equivalente e, simplificado sistema de vibração para o cálculo da
ressonância longitudinal do eixo no modo fundamental ............................................... 28
Figura 5.2 - Vibração rotacional do eixo ....................................................................... 29
Figura 6.1 - Vibração vertical da viga navio de 2 a 5 nós ............................................. 31
Figura 7.1 - Componentes de vibração da superestrutura ........................................... 33
Figura 7.2 - Frequência de Rotação e Frequência de Cisalhamento da Superestrutura
...................................................................................................................................... 35
Figura 8.1 – Dados de Entrada – Parâmetros de Forma – Exemplo AHTS ................. 36
Figura 8.2 – Dados de Entrada – Parâmetros do Propulsor e do Motor – Exemplo
AHTS ............................................................................................................................ 37
Figura 8.3 – Cálculos Holtrop [11] – Exemplo AHTS .................................................... 37
Figura 8.4 – Resultados obtidos Aba Holtrop – Exemplo AHTS .................................. 38

xiv
Figura 9.1 – Embarcação de Estudo – Navio Petroleiro ............................................... 41
Figura 9.2 – Dados do Prosec – Navio Petroleiro ........................................................ 42
Figura 9.3 – Frequência do Propulsor – Navio Petroleiro ............................................. 42
Figura 9.4 – Frequência do Motor – Navio Petroleiro ................................................... 43
Figura 9.5 – Frequência do Eixo Propulsor – Navio Petroleiro ..................................... 43
Figura 9.6 – Pressão Induzida na Popa pelo Propulsor – Navio Petroleiro .................. 43
Figura 9.7 – Dados de Entrada para Resposta da Viga Navio – Navio Petroleiro ....... 44
Figura 9.8 – Frequências de Resposta da Viga Navio – Navio Petroleiro .................... 44
Figura 9.9 – Frequência Natural da Superestrutura – Navio Petroleiro ........................ 45
Figura 9.10 – Avaliação de Ressonância do Propulsor – Navio Petroleiro .................. 46
Figura 9.11 – Avaliação de Ressonância do Motor – Navio Petroleiro ........................ 46
Figura 9.12 – Avaliação de Ressonância do Eixo Propulsor – Navio Petroleiro .......... 47
Figura 9.13 – Modelo 3D e 1D – Navio Petroleiro no 1º Modo de Vibração................. 47
Figura 9.14 – Embarcação de Estudo – Navio AHTS .................................................. 49
Figura 9.15 – Dados do Prosec – Navio AHTS ............................................................ 50
Figura 9.16 – Frequência do Propulsor – Navio AHTS ................................................ 50
Figura 9.17 – Frequência do Motor – Navio AHTS ....................................................... 51
Figura 9.18 – Frequência do Eixo Propulsor – Navio AHTS ........................................ 51
Figura 9.19 – Pressão Induzida na Popa pelo Propulsor – Navio AHTS ..................... 51
Figura 9.20 – Dados de Entrada para Resposta da Viga Navio – Navio AHTS ........... 52
Figura 9.21 – Frequências de Resposta da Viga Navio – Navio AHTS ....................... 52
Figura 9.22 – Frequência Natural da Superestrutura – Navio AHTS ........................... 53
Figura 9.23 – Avaliação de Ressonância do Propulsor – Navio AHTS ........................ 54
Figura 9.24 – Avaliação de Ressonância do Motor – Navio AHTS .............................. 54
Figura 9.25 – Avaliação de Ressonância do Eixo Propulsor – Navio AHTS ................ 55
Figura 9.26 – Frequências Naturais da Viga Navio medidas por Acelerômetro – Navio
AHTS ............................................................................................................................ 55
Figura 9.27 – Modelo 3D – Navio AHTS no 1º Modo de Vibração ............................... 56

xv
Índice de Tabelas
Tabela 2.1 - Ligação entre a excitação e a resposta dos itens .................................... 11
Tabela 3.1 - Máximos valores dos coeficientes de esteira ........................................... 21
Tabela 4.1 - Momentos livres, KN.m - Motor diesel de baixa rotação .......................... 25
Tabela 5.1 - Influência das Vibrações do Eixo sobre as Estruturas ............................. 26
Tabela 9.1 – Dados Principais do Navio Petroleiro ...................................................... 41
Tabela 9.2 – Frequências Naturais do Modelo 3D do Navio Petroleiro ........................ 47
Tabela 9.3 – Frequências Naturais do Modelo 1D do Navio Petroleiro ........................ 48
Tabela 9.4 – Comparação de Frequências Naturais da Viga Navio do Navio Petroleiro
...................................................................................................................................... 48
Tabela 9.5 – Dados Principais do Navio AHTS ............................................................ 49
Tabela 9.6 – Frequências Naturais do Modelo 3D do Navio AHTS ............................. 56
Tabela 9.7 – Comparação de Frequências Naturais da Viga Navio do Navio AHTS ... 56

1
1. Apresentação
1.1. Introdução
Geralmente a vibração existente nos navios não causa efeitos nocivos. Entretanto,
quando problemas de vibração excessiva em navios já em operação são
diagnosticados, as primeiras causas relacionadas são: incômodo à tripulação e
redução do conforto; danos por fadiga em estruturas e partes das máquinas e; mau
funcionamento e aumento da manutenção em componentes das máquinas e
equipamentos. Nesses casos, as correções que devem ser realizadas para
minimização dos danos, costumam ser dispendiosas e demoradas. Daí a importância
dos estudos de vibração para a Engenharia Naval.
O processo para evitar vibrações excessivas deve começar numa fase inicial do
planejamento. Assim, é de extrema importância o desenvolvimento de métodos
confiáveis de previsão sobre o comportamento dinâmico dos navios. Buscando assim,
uma solução integrada entre os principais excitadores e a estrutura da embarcação.
1.2. Objetivo e Motivação
O presente estudo tem como objetivo incorporar critérios de vibração no processo de
seleção do sistema propulsivo de navios. Orientando o arquiteto naval através de
procedimentos de verificação de vibrações em seu projeto, a fim de evitar vibrações
nocivas quando o navio entra em serviço.
Essa análise parece interessante na medida em que hoje a seleção é feita com pouca
ou nenhuma preocupação com o comportamento dinâmico da embarcação e são cada
vez maiores os casos de navios novos com problema de vibração excessiva.

2
1.3. Metodologia
Para obter uma imagem completa do estado atual da técnica relacionada aos
problemas de vibração em navios e as ferramentas para a sua solução, o projetista
tem a sua disposição vários livros didáticos e também simpósios e conferências [1-4].
Assim, para um projetista de navios, é interessante a tarefa de converter informações
em um procedimento eficiente de custo/tempo.
Uma primeira análise do sistema propulsivo integrada ao comportamento dinâmico é
então, desenvolvida ao longo deste projeto. O procedimento é baseado no uso de
equações simples e fórmulas empíricas.
Após o desenvolvimento de uma planilha que sintetiza as fórmulas e equações, duas
embarcações com dados e frequências naturais conhecidos são então testadas, de
modo a avaliar o procedimento aqui apresentado. As frequências naturais destas
embarcações foram estimadas através de medições e modelações, presentes em
trabalhos anteriores que serão aqui referenciados.

3
2. Decifrando a vibração em navios
2.1. O que é vibração?
Qualquer movimento que se repita após um intervalo de tempo é denominado vibração
ou oscilação. A maioria das atividades humanas envolve vibração, uma vez que
qualquer corpo que possua massa e rigidez é passível de viração.
Um sistema vibratório possui, em geral, um meio para armazenar energia potencial,
um meio para armazenar energia cinética e um meio de perda gradual de energia. A
vibração de um sistema envolve a transferência alternada de sua energia potencial
para energia cinética e vice-versa. Porém, se o sistema for amortecido, certa
quantidade de energia é dissipada em cada ciclo de vibração.
Sempre que a frequência de excitação externa coincidir com a natural de vibração de
uma máquina ou estrutura, ocorre um fenômeno conhecido como ressonância, que em
navios resulta em ruídos, desconforto a tripulação e falhas da estrutura e
equipamentos. As forças de excitação externas podem ser originadas no próprio navio,
onde se consideram as forças e momentos de desbalanceamento nos motores
principal e auxiliares, ou podem ser causadas por agentes externos, por exemplo,
forças e momentos causados pelo propulsor e forças causadas pela ação do mar.
2.1.1. Vibração Livre para Um Grau de Liberdade
Um sistema sofre vibração livre quando oscila sob uma perturbação inicial, sem a ação
de nenhuma força após essa perturbação inicial. O sistema vibratório mais simples é
apresentado através de um sistema massa-mola, conforme a Figura 2.1 abaixo:
Figura 2.1 - Sistema massa-mola

4
A equação geral do movimento que descreve um sistema vibratório é apresentada a
seguir:
Onde,
= força de atuação externa;
m = massa do sistema;
c = constante de amortecimento;
k = constante elástica;
Como a vibração é livre, é igual à zero. Além disso, pelo mesmo motivo o
sistema não possui o fator referente ao amortecimento , logo a expressão acima
fica reduzida a:
Assumindo a solução da equação geral x(t) como:
Posição da massa ao longo do tempo;
Velocidade da massa ao longo do tempo;
Aceleração da massa ao longo do tempo;
Substituindo as soluções acima na equação do movimento, tem-se:
Através da equação apresentada acima, pode-se perceber que a frequência natural do
sistema é uma relação entre a rigidez do corpo e sua massa.

5
2.1.2. Vibração Livre para N Graus de Liberdade
Um sistema com n graus de liberdade, possui n frequências naturais, cada uma
associada a sua própria forma modal, conforme mostrado na Figura 2.2:
Figura 2.2 - Modo de vibração da viga-navio
A solução de um sistema com n graus de liberdade é obtida de maneira análoga ao
sistema de um grau de liberdade.
A equação geral do movimento, para massa é descrita da seguinte forma:
Onde,
Designa a soma de todas as forças que agem sobre a massa;
Número de graus de liberdade do sistema;
Aplicando-se a fórmula da equação geral do movimento a cada massa do sistema,
tem-se:

6
Essa equação pode ser expressa na forma matricial como:
Onde , , e são denominadas matrizes de massa, amortecimento e rigidez,
respectivamente, e são dadas por:
E, , , e são os vetores deslocamento, velocidade, aceleração e força,
respectivamente dados por:
Como dito anteriormente, para vibração livre e são iguais a zero, logo tem-se:

7
Pode-se encontrar a solução do problema considerando-o como um problema de
autovalor:
Para, i = 1,2,3 ... n
Adotando-se a separação de variáveis no domínio do espaço e no domínio do tempo,
tem-se:
vetor de máximas amplitudes dos deslocamentos dos graus de
liberdade do sistema
função do tempo t
Substituindo-se a solução na equação anterior, pode-se reescrevê-la desta forma:
Além disso, a equação acima pode ser descrita na forma escalar como n equações
separadas:
Para, i = 1, 2, 3... n
Da qual podemos obter as relações:
Para, i = 1,2,3..n
Visto que o lado esquerdo da equação acima é independente do índice i, e o lado
direito é independente de t, ambos os lados devem ser iguais a uma constante.
Considerando a constante como , pode-se reescrever a equação da seguinte forma:

8
ou
A solução do problema acima pode ser dada por:
Onde,
amplitude
ângulo de fase
Além da solução dada acima, tem-se que não pode assumir um valor arbitrário. Ele
precisa, necessariamente, satisfazer a equação do autovalor:
Para uma solução não trivial da equação acima, o determinante da matriz de
coeficientes deve ser zero. Isto é:
A equação enunciada acima é conhecida como equação característica, é chamado
de autovalor e é a frequência natural do sistema.
Resolvendo-se o determinante e o igualando a zero, podem-se obter as n’s
frequências naturais do sistema de vibração de n graus de liberdade.
É de extrema importância estimar as frequências naturais da viga-navio, para evitar
que os efeitos de ressonância ocorram e causem danos à estrutura.
Para o projeto em questão, serão encontradas as frequências naturais dos 4 primeiros
modos de vibração do navio.
9
2.2. Como evitá-la?
O processo para evitar as vibrações deve começar na fase de desenvolvimento do
projeto conceitual. Os quatro elementos de relevância na vibração do navio são:
- Excitação
- Rigidez
- Relação de frequência
- Amortecimento
De acordo com [5] sabemos que qualquer um dos seguintes tópicos contribui para a
redução da vibração:
2.2.1. Reduzir a amplitude da força excitante, F:
Nas vibrações induzidas por propulsores, a excitação pode ser reduzida alterando-se a
hidrodinâmica instável dos propulsores. Isto pode envolver a remoção ou alteração de
linhas para reduzir a não uniformidade do fluxo da esteira ou podem envolver
modificações geométricas nos propulsores em si.
2.2.2. Aumento de rigidez, K:
É definida como força de mola por unidade de deflexão. Em geral, a rigidez deve ser
aumentada quando as variações na frequência natural são realizadas por variações na
rigidez. Não é uma prática recomendada reduzir a rigidez do sistema em tentativas de
reduzir a vibração do navio.
2.2.3. Evitar razão de frequência próxima da unidade:
Sabendo que ω / ωn = 1 é a condição de ressonância. Nota-se que ω/ωn pode ser
alterada através da variação da frequência de excitação ω ou da frequência natural
ωn. O espectro de ω pode ser alterado, alterando a RPM de uma fonte relevante de
máquinas rotativas ou, no caso de vibrações induzidas por propulsores, alterando
a RPM dos próprios propulsores ou o seu número de pás.

10
2.2.4. Aumento de amortecimento, ζ:
O amortecimento de sistemas estruturais em geral, e dos navios, em particular, é
pequeno; ζ << 1. Além disso, é difícil aumentar o amortecimento significativamente
em sistemas tais como navios; ζ é, em geral, o menos eficaz dos quatro parâmetros
disponíveis para as mudanças nas características de vibração do navio.
2.3. Fontes de Excitação e Respostas
O mecanismo completo de vibração de um navio é bastante complexo quando se leva
em conta todas as fontes de excitação e respostas. Por conseguinte, é mais
conveniente, neste caso, lidar com cada problema separadamente, porém mais de um
problema pode ocorrer ao mesmo tempo. É conveniente que as principais fontes de
vibração excitantes sejam tratadas em primeiro lugar, uma vez que, níveis elevados de
vibração excessiva podem ocorrer quase independentemente das características do
sistema estrutural. Em geral, as principais fontes são o propulsor e o motor diesel
principal de baixa rotação.
Figura 2.3 – Fontes de Vibração em Navios
Resultados aceitáveis são alcançados concentrando a atenção em dois dos quatro
elementos anteriormente citados que são a excitação e a relação de frequência. Têm-
se como objetivos:

11
Minimizar excitações vibratórias, dentro das limitações normais impostas por
variáveis de projeto;
Evitar ressonâncias que envolvem a participação ativa dos principais
subsistemas em faixas de frequência em que as excitações dominantes são
mais fortes.
A avaliação baseia-se nos resultados dos seguintes principais itens de investigação,
que são necessários para obter um comportamento de vibração de um navio:
Resposta:
Vibração Vertical da Viga Navio
Vibração Longitudinal da Superestrutura
Excitação:
Propulsor
Motor diesel de baixa rotação
Vibração do sistema de eixos longitudinais
A ligação entre as fontes de excitação e os itens de resposta, é dada na Tabela 2.1. A
vibração desagradável da superestrutura é o objeto principal a manter sob controle e,
a fonte correspondente mais importante de excitação é o propulsor.
Tabela 2.1 - Ligação entre a excitação e a resposta dos itens
Excitação Resposta
Ressonância da
viga navio
Ressonância da
superestrutura
Vibração forçada na
popa
Propulsor ... x x
Motor diesel de
baixa rotação
x
vertical ... xa
Vibração do eixo
longitudinal
x
longitudinal x ...
xa – causada pela ressonância da viga navio

12
Uma variedade de vibrações locais, como de corrimões, antenas, painéis de
revestimento, etc. podem ser encontradas em ensaios de navios novos, para além
desses três tópicos já abordados. Mas os problemas locais geralmente envolvem
ressonâncias locais estruturais e, são muitas vezes consideradas como problemas
menores, pois a abordagem de correção por rigidez local pode ser facilmente
alcançável.
13
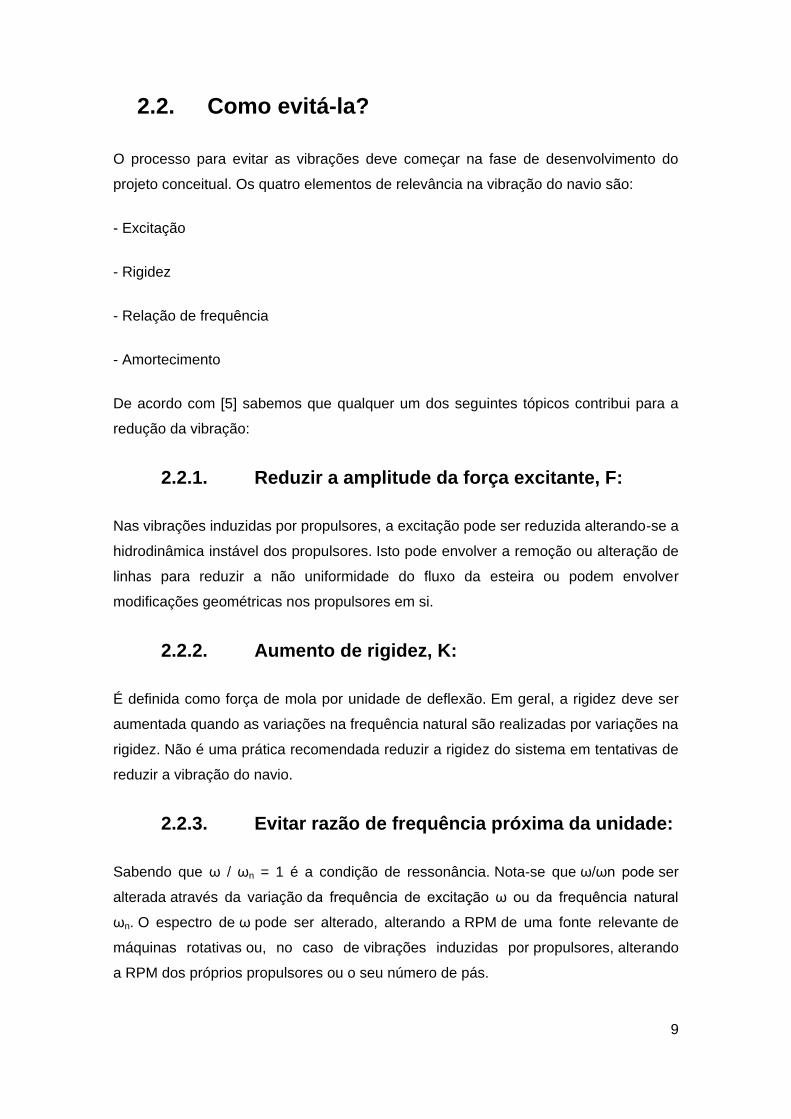
3. Excitação – Propulsor
O propulsor é o componente do navio responsável por pelo menos cerca de 80% dos
problemas de vibração na superestrutura. Onde, navios do tipo Ro-Ro são ainda mais
sensíveis à excitação do mesmo.
A investigação da excitação do hélice deve ser realizada com o intuito de visar linhas
de popa e projeto do propulsor, ideais.
Figura 3.1 - Propulsor modelado no software CFX do pacote Ansys
Fonte: sva-potsdam.de
3.1. Esteira
A esteira formada na água pelo casco é um dos aspectos mais críticos que devem ser
analisados para evitar vibração inaceitável no navio. Problemas de
vibração no propulsor, em geral, começam com linhas de casco desfavoráveis na
região de abertura de popa, e se manifestam como uma esteira não
uniforme. Infelizmente, a excitação da hélice é muito mais difícil de quantificar do
que a excitação a partir de fontes internas das máquinas. Isto acontece por causa da
complexidade da hidrodinâmica instável do funcionamento do hélice, na sequência do
casco não uniforme. Na verdade, a não uniformidade da esteira é a parte mais
complicada, e também a mais importante.

14
Figura 3.2 – Representação da esteira de um navio - CFX do pacote Ansys
Fonte: sva-potsdam.de
Dados da esteira são normalmente apresentados em mapas “isowake” onde as linhas
são desenhadas por pontos de mesma esteira. A Esteira de Taylor ( ) é definida
como:
Onde é a medida da velocidade do escoamento medido para o disco do hélice e
é a medida da velocidade do modelo do navio. Com , por exemplo, a
velocidade da água num ponto particular é de 20% da velocidade do modelo do navio.
Do ponto de vista da excitação, a variação da esteira deve ser a menor possível.
Como exemplo, uma variação da esteira de 0,1 a 0,85 pode dar origem à excitação
excessiva do hélice. Alterações nas linhas popa que garantam uma variação da esteira
de 0,1 a 0,7 são assumidas para dar um nível de excitação consideravelmente menor.
A distinção entre os dois tipos de esteira diferentes é útil para a compreensão da
importância das folgas entre as pás do hélice e superfícies locais do casco. Em
primeiro lugar, é útil considerar que a excitação da superfície do casco pelo hélice é
composta de dois efeitos:

15
Efeito da esteira: Efeito de alterar o fluxo de entrada da esteira para hélice de
acordo com uma relocalização especificada do hélice, mas com o hélice numa
posição fixa em relação ao casco.
Efeito de difração: Efeito de alterar a localização da hélice em relação ao
casco, mas com o fluxo de entrada da esteira para hélice mantida fixa.
Folgas vante-ré geralmente são menos críticas do que os afastamentos verticais.
Esteiras atenuam muito lentamente com essa distância. Embora o aumento das folgas
vante-ré atuem para reduzir a esteira, a redução será ligeiramente detectável dentro
dos limites normais de variação. A folga vertical mínima de 25% do diâmetro do hélice
é mais ou menos aceita como o padrão na prática comercial, bem como na naval.
Figura 3.3 – Folgas vante-ré - CFX do pacote Ansys
Fonte: sva-potsdam.de
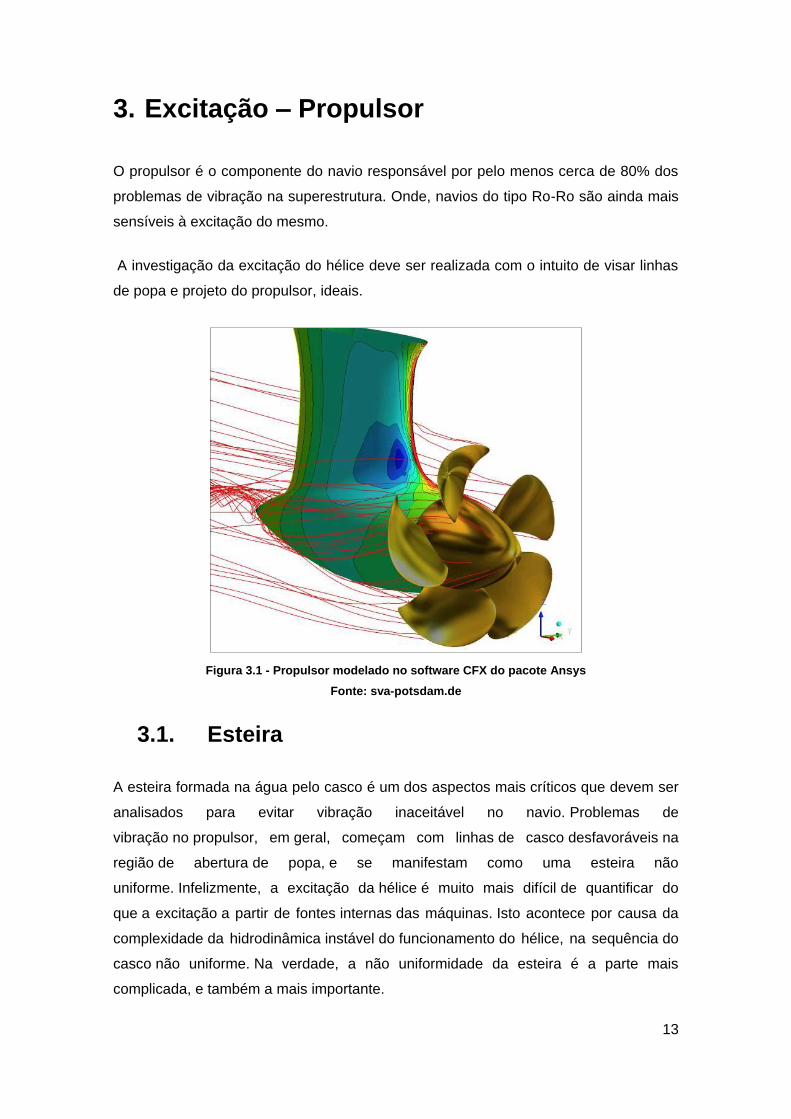
Para navios com altos coeficientes de bloco, regiões de “dead water” podem ocorrer
onde o fluxo for muito instável. Linhas típicas de um navio deste tipo são dadas na
Figura 3.3. A fim de obter maiores folgas entre o hélice e a parte superior da abertura
do hélice, o navio é desenhado com uma linha d´água muito reta na parte superior da
abertura do hélice. As melhores soluções são dadas pelas linhas tracejadas; isto é,
antes melhorar o ângulo da linha d’água do que aumentar as folgas
16
Figura 3.4 - Linhas D’água sem cortes para um navio com extremas linhas cheias, com as
alterações propostas.
As forças induzidas pelo propulsor são frequentemente separadas em dois tipos
principais de acordo com a maneira pela qual elas são transmitidas do propulsor para
o navio; ou seja, forças de eixo e forças na superfície do casco.
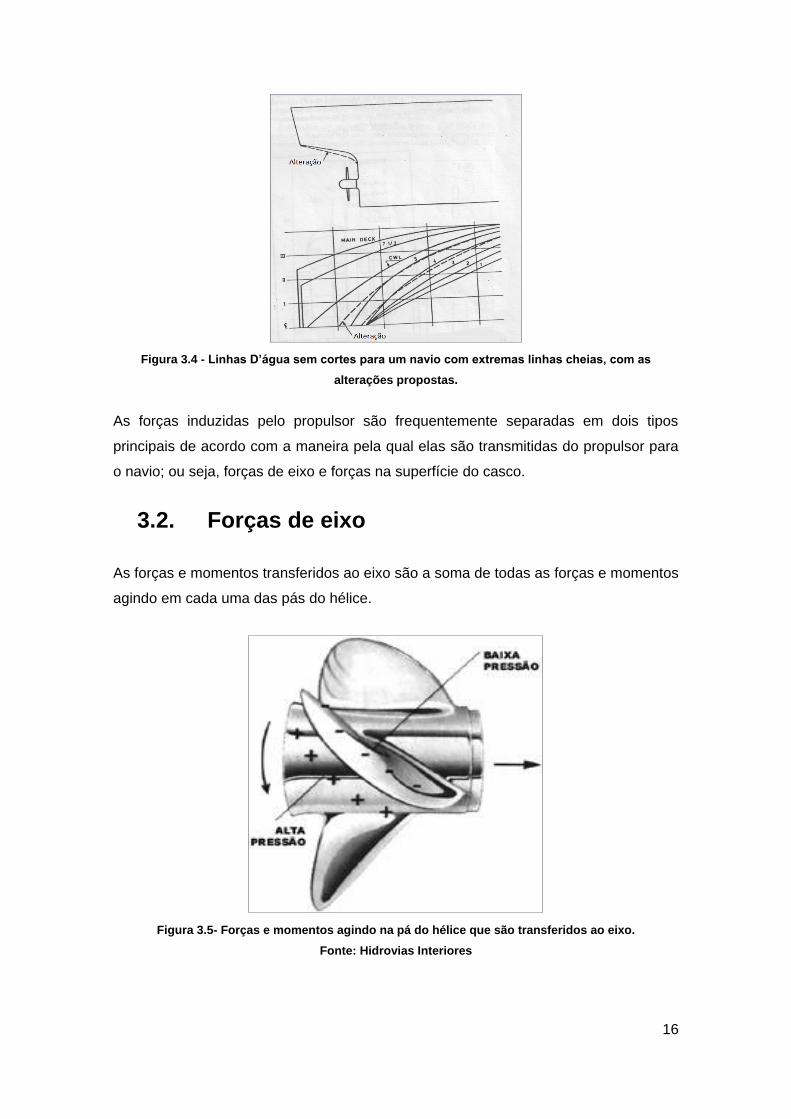
3.2. Forças de eixo
As forças e momentos transferidos ao eixo são a soma de todas as forças e momentos
agindo em cada uma das pás do hélice.
Figura 3.5- Forças e momentos agindo na pá do hélice que são transferidos ao eixo.
Fonte: Hidrovias Interiores

17
Desde que as distâncias entre as pás sejam iguais, as forças e os momentos
transferidos ao sistema de eixos podem ser expressos por uma Série de Fourier,
consistindo somente de componentes de múltiplos da frequência de passagem da pá.
As frequências de excitação são então:
Onde,
frequência de excitação do propulsor
z número de pás do propulsor
revoluções por minuto do propulsor (rpm)
n inteiro [frequência da pá (primeiro harmônico n=1)]
Em principio, existem dois métodos para mudar as forças de eixo; mudando a carga
das pás ou mudando o número de pás. A variação de carregamento na pá pode ser
reduzida com a aplicação de pás com um enviesamento tal que a pá entre na esteira
de forma progressiva.
Figura 3.6 - Distribuição de carga na pá, para 4 pás diferentes
Fonte: www.sciencedirect.com
A amplitude das forças e momentos transferidos ao eixo está indicada na figura 3.7.
As figuras são retiradas de cálculos de propulsores convencionais série B [6].

18
Figura 3.7 - Empuxo normalizado (F3 e momento letor hori ontal em variações da
frequência da pá. Os valores médios e os desvios padrões; 4, 5 e 6 pás do hélice fixados em
navios convencionais de parafuso simples.
Geralmente considera-se que os propulsores com números de pás ímpares induzem
menores variações de carga, mas maiores momentos fletores do que os propulsores
com o número de pás pares. Normalmente, o efeito da cavitação é insignificante nas
forças transmitidas do propulsor para o eixo. Importante apenas, para as forças
transmitidas do propulsor para a superfície do casco.
3.3. Força de Pressão no Casco
A vibração dominante no casco do navio é causada pela cavitação provocada pelo
hélice que, induz forças de pressão na superfície do casco. Foi em meados da década
de 70 que a cavitação desencadeada pela esteira não uniforme, foi descoberta como
sendo a principal culpada na maior parte dos problemas de vibração do navio.

19
Figura 3.8 – Variação do Campo de Pressões induzidas pelo Propulsor
Fonte: sva-potsdam.de
A cavitação normalmente não é prejudicial do ponto de vista do desempenho
propulsivo do navio, a pá continua eficaz. A cavitação pode ou não ser erosiva,
dependendo em grande parte do grau da nuvem de cavitação (uma névoa de
pequenas bolhas). O aspecto devastador de cavitação se manifesta de forma
consistente, principalmente no campo de pressão que se irradia, e o ruído e a vibração
são assim, produzidos. O nível de excitação induzida na superfície do casco por um
hélice cavitado pode ter facilmente uma ordem de magnitude maior do que típicos
níveis onde não há cavitação.
A redução da força vibratória de cavitação é realizável com aperfeiçoamentos no
projeto do propulsor. Como observado anteriormente, a inclinação da pá pode ser
benéfica, assim como as alterações na distribuição da esteira. A ocorrência de
cavitação não pode ser ignorada na tentativa de controlar a vibração induzida pelo
propulsor no casco. Porém, a previsão das forças de cavitação no casco é muito mais
complicada, com muitos fatores contribuintes.
As mais importantes forças e momentos na frequência do hélice são indicados na
Figura 3.9. De acordo com [7] foi observado que os impulsos de pressão atuam na
superfície do casco com a dimensão de três diâmetros do propulsor, frente ao plano
do propulsor. Onde:
Componente vertical integrada das variações de pressão da extremidade
traseira da ré até três vezes o diâmetro do hélice à frente do plano do hélice;

20
Como na direção longitudinal;
Variações do empuxo;
Força vertical hidrodinâmica do hélice;
Momento fletor horizontal hidrodinâmico do hélice;
Figura 3.9 – Forças e Momentos mais importantes dados pelos Impulsos de Pressão no casco
Fonte: Guidelines for Prevention of Excessive Ship Vibration [7]
Na figura 3.10 o total das forças de excitação normalizadas com o empuxo médio é
apresentado. A componente vertical da força de excitação na superfície do casco é
de longe, a maior. A força é a componente horizontal do mesmo impulso de
pressão e é, portanto, apenas uma função da geometria da superfície do casco. Por
outro lado, as variações no empuxo são encontradas como sendo relativamente
pequenas e, no momento é ainda menor.
Figura 3.10 – Valores máximos, médios e mínimos das forças induzidas pelo hélice (primeiro
harmônico na frequência da pá)
Fonte: Guidelines for Prevention of Excessive Ship Vibration [7]

21
Existe uma significante diferença entre o campo de pressões induzido pela não-
cavitação do propulsor e o induzido pela cavitação transiente. Assim, na área da
superfície do casco perto do propulsor, os impulsos de pressão total composto pela
contribuição de ambas, não-cavitação e cavitação do propulsor, devem ser incluídas.
Dessa forma, a projeto em questão utiliza fórmulas empíricas para as estimativas dos
impulsos de pressão do propulsor na frequência da pá, de acordo com [7].
3.3.1. Impulsos de Pressão – Parcela Cavitante
Os cálculos dos impulsos de pressão na frequência da pá para um hélice em
cavitação, , podem ser simplificados pela fórmula:
Onde,
RPM do propulsor;
diâmetro do propulsor;
velocidade do navio (m/s);
calado no centro do navio (m), vide Figura 3.12;
distância de r/R=0,9 para uma posição sobre o casco submerso quando a
pá está na primeira posição, vide Figura 3.12;
quando
máximo pico da esteira; quando não medido, os valores são retirados
da Tabela 3.1, ver figura 3.11 para projetos bi-hélice;
esteira efetiva;
Tabela 3.1 - Máximos valores dos coeficientes de esteira
Mono-Hélice Coeficiente de Esteira Máximo
Petroleiros
OBO
Bulk
LPG/LNG

22
Dry cargo
Contentor
RO/RO
Coasters
Trawlers
Bi-Hélice Coeficiente de Esteira Máximo
Pé de Galinha
Tipo A
Tipo B
Figura 3.11 - Exemplos de projeto de propulsores Bi-Hélice
Fonte: Guidelines for Prevention of Excessive Ship Vibration [7]
Figura 3.12 - Parâmetros de entrada para os cálculos dos impulsos de pressão
Fonte: Guidelines for Prevention of Excessive Ship Vibration [7]

23
Com isso, determinamos a parcela cavitante dos impulsos de pressão. Lembrando
que, no projeto, os critérios de 5 a 10% de cavitação, devem ser aplicados para
fornecer uma proteção razoável contra a subdimensionamento das pás da hélice do
ponto de vista da cavitação instável.
3.3.2. Impulsos de Pressão – Parcela Não Cavitante
Para um propulsor convencional, os impulsos de pressão na frequência da pá
originados da não cavitação do propulsor, , podem ser calculados pela fórmula
simplificada:
Onde,
RPM do propulsor;
diâmetro do propulsor;
distância de r/R=0,9 para uma posição sobre o casco submerso quando a
pá está na primeira posição, vide Figura 3.12;
número de pás do propulsor;
3.3.3. Impulsos de Pressão Total
O total dos impulsos de pressão agindo sobre a parte local da superfície do casco
submerso pode então ser escrito como:
De acordo com [8], o nível máximo admissível para os impulsos de pressão induzidos
pelo propulsor é igual a:

24
4. Excitação – Motor Diesel de Propulsão
Principal
O motor diesel de baixa rotação pode ser uma fonte de vibração estrutural excessiva
se a frequência dos momentos do motor coincidirem com a frequência natural da viga
navio.
A excitação vibratória do motor diesel pode ser considerada como composta de três
componentes periódicas de força e três componentes periódicas de momento atuando
sobre a base do motor. Dois diferentes tipos de forças podem ser associados ao motor
de combustão interna: (a) forças de pressão de gás devido aos processos de
combustão (pares de força) e (b) forças inerciais produzidas pelas acelerações dos
componentes do motor (forças externas). A figura 4.1 mostra as forças e momentos
típicos que atuam sobre um motor diesel.
Figura 4.1 - Forças e momentos atuando no alicerce do motor diesel de baixa rotação
Fonte: Guidelines for Prevention of Excessive Ship Vibration [7]
25
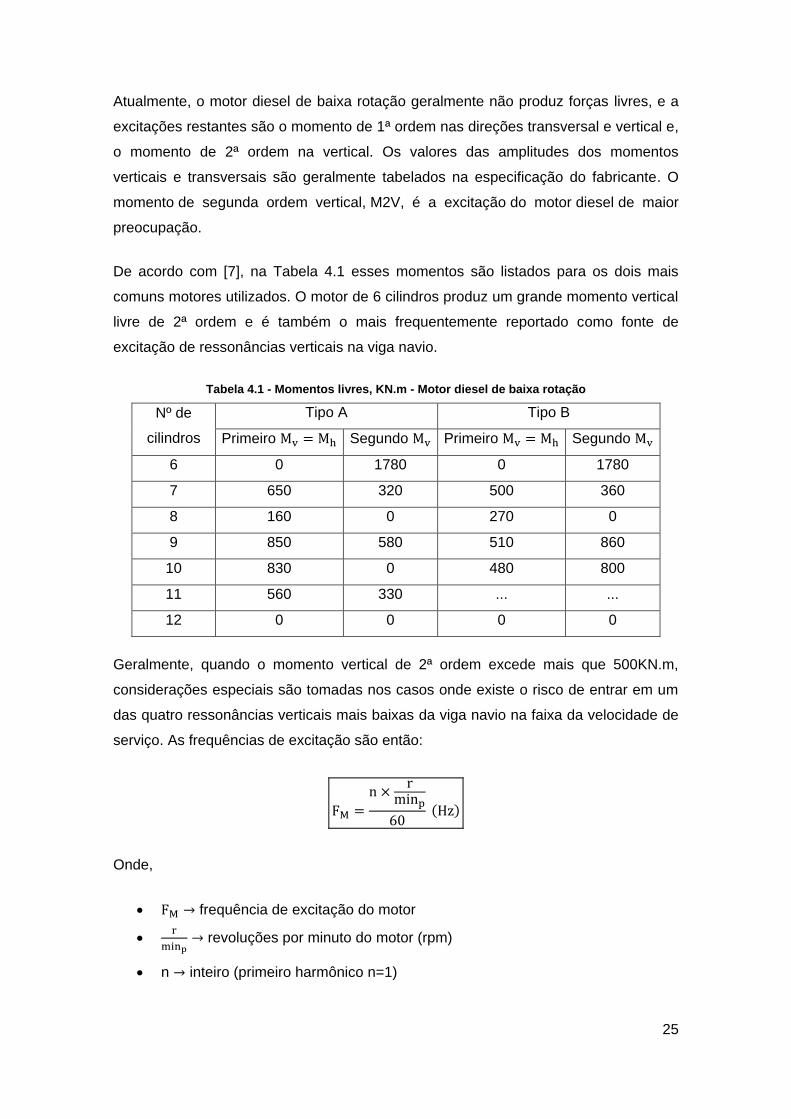
Atualmente, o motor diesel de baixa rotação geralmente não produz forças livres, e a
excitações restantes são o momento de 1ª ordem nas direções transversal e vertical e,
o momento de 2ª ordem na vertical. Os valores das amplitudes dos momentos
verticais e transversais são geralmente tabelados na especificação do fabricante. O
momento de segunda ordem vertical, M2V, é a excitação do motor diesel de maior
preocupação.
De acordo com [7], na Tabela 4.1 esses momentos são listados para os dois mais
comuns motores utilizados. O motor de 6 cilindros produz um grande momento vertical
livre de 2ª ordem e é também o mais frequentemente reportado como fonte de
excitação de ressonâncias verticais na viga navio.
Tabela 4.1 - Momentos livres, KN.m - Motor diesel de baixa rotação
Nº de
cilindros
Tipo A Tipo B
Primeiro Segundo Primeiro Segundo
6 0 1780 0 1780
7 650 320 500 360
8 160 0 270 0
9 850 580 510 860
10 830 0 480 800
11 560 330 ... ...
12 0 0 0 0
Geralmente, quando o momento vertical de 2ª ordem excede mais que 500KN.m,
considerações especiais são tomadas nos casos onde existe o risco de entrar em um
das quatro ressonâncias verticais mais baixas da viga navio na faixa da velocidade de
serviço. As frequências de excitação são então:
Onde,
frequência de excitação do motor
revoluções por minuto do motor (rpm)
n inteiro (primeiro harmônico n=1)

26
5. Excitação – Eixo Longitudinal
A resposta dinâmica do eixo pode ser convenientemente divida em vibração
longitudinal, torcional e rotacional. Sua importância relativa como uma das fontes de
problemas de vibração para a estrutura e maquinário é dada esquematicamente na
Tabela 5.1.
Tabela 5.1 - Influência das Vibrações do Eixo sobre as Estruturas
Tubo
Telescópico Eixo
Mancal
de
Escora
Vibração
da Viga
Navio
Vibração da
Superestrutura
Vibração
local
Vibração longitudinal
x x x x
Vibração torcional
x x
x x
Vibração rotacional x x
5.1. Vibração longitudinal
A vibração longitudinal da linha de eixo excita uma vibração estrutural na sala de
máquinas, no duplo fundo e em outras estruturas locais na sala de máquinas assim
como uma vibração local e global na superestrutura através do mancal de escora, ou
pode excitar as máquinas de propulsão própria, isto é, o motor, a caixa redutora, e os
componentes do sistema de eixos. Ou seja, a vibração longitudinal do eixo é mais
importante a ser verificada neste projeto.
Usualmente, é no modo fundamental que ocorrem os maiores problemas de vibração.
Além disso, a massa total e a rigidez do mancal de escora são os parâmetros mais
importantes.
O projeto do mancal de escora pode ser qualquer um dos seguintes tipos: integrado
com o motor diesel, integrado com a caixa redutora, ou separado do motor e da caixa
redutora.
Mancal de Escora integrado ao Motor Diesel de Baixa Rotação: Como
atualmente, a maioria dos motores diesel de baixa rotação tem um mancal de
escora integrado na extremidade a ré do motor, este determinado tipo de

27
arranjo terá a rigidez do mancal de escora bastante constante,
independentemente da estrutura do duplo fundo. Assim, o modo fundamental
será uma função do tipo de motor, do número de cilindros e do comprimento do
eixo, a partir do motor até o propulsor.
Mancal de Escora integrado à Caixa Redutora: Na maioria das instalações de
média rotação o mancal de escora é integrado à caixa redutora. Nesses casos,
tanto a caixa redutora quanto a estrutura de sustentação são muito importantes
para a rigidez longitudinal total. Assim, os valores empíricos são de difícil
utilização na avaliação direta do modo fundamental.
Mancal de Escora separado do Motor e da caixa Redutora: Este tipo de arranjo
é comumente usado em motores grandes como turbinas de propulsão, mas é
pouco utilizado em instalações de motor diesel de baixa rotação. A variação da
rigidez global do mancal de escora devido ao projeto individual e ao
dimensionamento dos alicerces do mancal de escora e a estrutura do duplo
fundo podem ser significantes e limitam o uso de dados empíricos.
A seguir uma fórmula simples é dada a partir do qual uma estimativa aproximada do
modo fundamental pode ser obtida. Para o modo fundamental, que é uma simples
vibração em fase do conjunto eixo mais a massa do propulsor (incluindo a massa
virtual da água adicionada que é, aproximadamente, 60%do peso do propulsor), sobre
um ponto fixo no alicerce do mancal de escora, a estimativa da frequência natural
pode ser feita utilizando-se a fórmula para um sistema de massa/mola simples:
Onde,
frequência de excitação do eixo;
efetiva rigidez global do mancal de escora;
massa total do sistema
Cálculos da massa efetiva do sistema são efetuados e adicionam-se as massas do
propulsor (incluindo a massa virtual da água) e do sistema de eixos.

28
Em relação à rigidez global do mancal de escora, Det Norske Veritas de acordo com
[9], tem a partir de suas próprias investigações a seguinte experiência:
Figura 5.1- Original, equivalente e, simplificado sistema de vibração para o cálculo da ressonância
longitudinal do eixo no modo fundamental
Fonte: Guidelines for Prevention of Excessive Ship Vibration [7]
5.2. Vibração torcional
Forças de reação no alicerce do mancal de escora originadas pela vibração torcional
do eixo normalmente não produzem excitação na viga navio. No entanto, em navios
que possuem motor diesel de baixa rotação, a vibração na superestrutura foi
verificada. Isto foi devido principalmente a uma ressonância longitudinal torcional
excitada pelo motor na faixa da velocidade total.
A avaliação da vibração torcional do sistema de eixos está sujeita a requisitos de
normas de classificação. Condições de ressonância devem ser evitadas na faixa de
velocidade total.

29
5.3. Vibração rotacional
Na vibração rotacional, Figura 5.2, é interessante investigar a ressonância, pois ela
pode causar significativas:
Tensões dinâmicas adicionais no eixo propulsor próximo ao propulsor;
Perturbações no mancal de escora como superaquecimento ou desgaste;
Ampliação dinâmica de reações dos mancais; que é a causa da vibração
estrutural na popa.
O efeito principal de vibração rotacional ocorre na área do tubo telescópico, portanto,
esta é mais difícil reconhecer que a vibração longitudinal e torcional. De acordo com
[7], entre vários casos de desgaste do mancal do tubo telescópico, nos últimos anos, e
também a perda de um hélice, têm sido atribuídos à vibração rotacional.
A posição do ponto de apoio do mancal de escora e sua rigidez influenciam fortemente
a frequência natural. A dificuldade de obtenção de alta precisão nos cálculos de
frequências naturais reside nas determinações da rigidez e posição do ponto de apoio
do mancal de escora e, da massa adicional de água bem como seu momento de
inércia.
Figura 5.2 - Vibração rotacional do eixo
Fonte: Guidelines for Prevention of Excessive Ship Vibration [7]

30
6. Resposta – Estrutura do Navio
As forças de pulsação do propulsor e do motor diesel de baixa rotação podem causar,
diretamente sobre a superfície do casco ou indiretamente através do eixo, vibração
preocupante na estrutura do navio. O nível de vibração resultante depende:
Magnitude das forças de excitação e suas frequências
Propriedades dinâmicas na estrutura.
Métodos de cálculos simples para a investigação da frequência natural da viga navio
serão apresentados a seguir:
6.1. Vibração da Viga Navio
A forma de vibração da viga navio pode ser uma dos seguintes ou a combinação
destas:
Vibração flexional, vertical ou horizontal;
Vibração torcional;
Vibração longitudinal;
Normalmente, os modos de vibração vertical e longitudinal são ligeiramente
acoplados. Para navios com grandes escotilhas em particular, o acoplamento entre os
modos horizontal e torcional é importante. Assim, temos:
6.1.1. Vibração Flexional Vertical
A vibração flexional vertical do casco é o tipo mais importante de vibração ressonante
que pode ser excitada pelo momento livre de 2ª ordem do motor diesel de baixa
rotação na faixa da velocidade máxima, Figura 6.1. Portanto, para navios equipados
com um motor desequilibrado, tendo momentos livres de 2º ordem superior a
500KN.m, a investigação das frequências naturais e da resposta para os modos
verticais do casco de 2-5 nós deve ser realizada.

31
Figura 6.1 - Vibração vertical da viga navio de 2 a 5 nós
Fonte: Guidelines for Prevention of Excessive Ship Vibration [7]
Existem várias fórmulas semi empíricas que envolvem apenas alguns poucos
parâmetros principais. Estas fórmulas preveem a menor frequência natural com
precisão suficiente para avaliações preliminares. A fórmula apresentada por Kumai
[10] é a seguinte:
Onde,
momento de inércia (m4);
deslocamento incluindo a massa virtual de água
adicionada (kg);
comprimento entre perpendiculares (m);
boca à meia nau (m);
calado de projeto (m);
Esta fórmula possui uma faixa de precisão de quando comparada com o
método de elementos finitos.
32
Para os modos mais elevados:
Onde,
número de nós;
1,02 para petroleiros;
1,0 para graneleiros;
0,845 para cargueiros;
Para os modos mais elevados, entretanto, a precisão da fórmula é significativamente
reduzida devido, principalmente, pelo fato de que tanto a distribuição de massa quanto
a rigidez estão se tornando cada vez mais importantes no sistema de vibração.
6.1.2. Vibração Flexional Horizontal
Para o mesmo número de nós, as frequências naturais de vibração horizontal da viga
navio são normalmente maiores do que os modos verticais da viga navio - para um
navio convencional, da ordem de 50%. A ocorrência de condições ressonantes na
faixa de velocidade máxima é improvável uma vez que nenhuma fonte de excitação
importante existe, exceto o mar.
6.1.3. Vibração Torcional
A vibração torcional somente ocorre em navios porta-contentores com grandes
escotilhas. O centro de torção para esses navios é abaixo da quilha e, as forças
horizontais do propulsor podem gerar grandes momentos de torção.
6.1.4. Vibração Longitudinal
A vibração longitudinal da viga navio pode ser gerada pelas variações de empuxo do
propulsor e pela vibração longitudinal do eixo. Nos casos onde ocorrem grandes
variações de empuxo ou ressonância longitudinal do eixo na faixa de velocidade
máxima, a severidade da vibração da superestrutura depende da ressonância
longitudinal da viga navio e da ressonância da superestrutura.

33
7. Resposta – Superestrutura
A vibração da superestrutura é excitada pela vibração flexional e longitudinal da viga
navio, Figura 7.1. A deflexão total de vibração é formada por:
Deflexão por cisalhamento da superestrutura;
Deflexão do apoio da superestrutura e movimento de corpo rígido devido ao
acoplamento;
Vibração vertical da viga navio ou
Vibração longitudinal da viga navio ou ambas;
Figura 7.1 - Componentes de vibração da superestrutura
Fonte: Guidelines for Prevention of Excessive Ship Vibration [7]
A resposta dinâmica característica da superestrutura é primeiramente uma função da
rigidez de cisalhamento da superestrutura e da rigidez vertical da estrutura de
sustentação, e o grau de acoplamento dos modos da viga navio. O movimento de
corpo rígido da superestrutura é, principalmente, devido a ressonância vertical da viga

34
navio de 2 a 5 nós excitados pelo motor diesel de baixa rotação ou pela vibração
forçada na popa excitada pelo propulsor.
Existem vários métodos simples para cálculos de aproximação da frequência natural
da superestrutura no modo fundamental longitudinal. A frequência natural da
superestrutura é obtida pela soma de dois componentes de acordo com a fórmula que
se segue. Estes dois componentes são a frequência de rotação, , e a frequência de
deflexão por cisalhamento e por flexão, . A frequência de rotação é utilizada para
incluir a flexibilidade do suporte elástico e a frequência de deflexão por cisalhamento e
por flexão, a rigidez de cisalhamento dos painéis no interior da superestrutura. Elas
são calculadas separadamente:
Onde,
constante da mola (N/m);
comprimento da superestrutura (m);
massa da superestrutura (Kg);
raio de giração (m) ~ 0,6h;
altura da superestrutura (m);
área de cisalhamento (m2);
número de anteparas longitudinais;
espessura das anteparas longitudinais (m);
coeficiente transversal de cisalhamento (N/m2);
fator de correção devido a deformação por flexão ~ 0,9;
O resultado da frequência f torna-se:

35
A frequência natural de cisalhamento, , é uma tarefa razoável para avaliar, enquanto
que a frequência natural de rotação, , depende totalmente da estimativa da mola
representando a rigidez efetiva do suporte da superestrutura, k.
Figura 7.2 - Frequência de Rotação e Frequência de Cisalhamento da Superestrutura
Fonte: Guidelines for Prevention of Excessive Ship Vibration [7]

36
8. Ferramenta de Cálculo Desenvolvida
Com a contribuição dos capítulos anteriores foi desenvolvida uma planilha capaz de
estimar as frequências de excitação do propulsor, do motor e do eixo longitudinal.
Além de calcular as respostas da viga navio e da superestrutura para essas
excitações. Ainda, verifica a possibilidade de ressonância entre os componentes.
As abas da planilha serão então abordadas neste capítulo. Cada componente recebeu
uma aba específica para os cálculos.
8.1. Aba Holtrop
Para a determinação da resistência total ao avanço da embarcação e da estimativa de
potência propulsiva foram feitas duas abas (que se complementam) baseadas nos
papers de J. Holtrop [11] (Aba Holtrop) e Oosterveld [12] (Aba Série B, detalhada na
seçãoo 8.2).
Na presente aba os dados de entrada são os parâmetros de forma do navio
(características principais, forma da proa e da popa, e dos apêndices), parâmetros do
propulsor (diâmetro, número de pás, rotação e etc.) e do motor (quantidade, eficiência
de transmissão e margens). Nas figuras abaixo, encontram-se as tabelas presentes
nesta aba, com o exemplo de um navio AHTS.
Figura 8.1 – Dados de Entrada – Parâmetros de Forma – Exemplo AHTS

37
Figura 8.2 – Dados de Entrada – Parâmetros do Propulsor e do Motor – Exemplo AHTS
Com a ajuda das fórmulas encontradas no paper do Holtrop [11] alguns cálculos são
realizados e os resultados para o casco, o motor e o propulsor podem então ser
obtidos, também com a ajuda do paper do Oosterveld [12] que será abordado adiante.
Figura 8.3 – Cálculos Holtrop [11] – Exemplo AHTS

38
Figura 8.4 – Resultados obtidos Aba Holtrop – Exemplo AHTS
8.2. Aba Série B
Como dito anteriormente, as abas Holtrop e Série B se complementam. Por isso, os
resultados encontrados na Figura 8.4 para o motor, propulsor e casco, utilizam-se de
dados presentes também na aba Série B.
A aba Série B é baseada no paper do Oosterveld [12] onde a seleção de um propulsor
do tipo série B é realizada. Através de polinômios interpoladores, contidos na
Referência [12], e dos dados da embarcação fornecidos pela Aba Holtrop, um
propulsor tipo série B é selecionado para a embarcação.
8.3. Aba Fontes de Excitação
A aba Fontes de Excitação é baseada nas seções 3, 4 e 5 deste trabalho.
Para a estimativa da frequência de excitação do propulsor são consideradas as forças
de eixo e a fórmula utilizada está presente na subseção 3.2 (as forças induzidas de
pressão no casco encontram-se na aba seguinte). Tal fórmula possui como dados de
entrada o número de pás do propulsor e sua rotação por minuto (rpm).
Já para a estimativa da frequência do motor utilizou-se a fórmula contida na seção 4,
onde a frequência do propulsor foi considerada. Aqui, não foi levada em consideração
a presença de caixas redutoras.

39
Foi estimada também a frequência do eixo longitudinal, considerando apenas sua
frequência de excitação longitudinal através da fórmula disposta na subseção 5.1. Esta
fórmula possui como dados de entrada a massa total do eixo (massa do eixo + massa
virtual), e a rigidez efetiva do mancal. A massa do eixo deve ser estimada através de
simplificações e a massa total pode ser considerada como sendo acrescida de 60%
desse valor. Já a rigidez global efetiva do mancal de escora é uma constante que
depende da integração ou não do mancal ao motor.
8.4. Aba Pressão Induzida na Popa
Na aba Pressão Induzida na Popa são considerados os Impulsos de Pressão no
Casco abordados na subseção 3.3. Tais Impulsos são calculados através das fórmulas
empíricas presentes na dada subseção e há um limite admissível que deve ser
considerado. Estes impulsos são divididos em parcelas cavitantes e não cavitantes e,
a pressão total induzida não pode ser superior a 8500 N/m2.
Os dados de entrada nesta aba são parâmetros do propulsor, já definidos
anteriormente, além de coeficientes de esteira (que dependem do tipo de embarcação)
e as claras do propulsor, que devem ser calculadas pelo usuário.
8.5. Aba Resposta da Viga Navio
Na aba Resposta da Viga Navio são calculadas as frequências naturais da viga navio
da embarcação nos 4 primeiros modos. As formulas empíricas utilizadas estão
presentes na seção 6 deste trabalho.
Os dados de entrada são os parâmetros da forma, já conhecidos, o momento de
inércia vertical da embarcação, o deslocamento (incluindo a massa virtual) e um
coeficiente que depende do tipo do navio.
Vale lembrar que, para os modos mais elevados, as fórmulas empíricas não
representam tão bem os valores das frequências naturais da viga navio.
8.6. Aba Resposta da Superestrutura
Na aba Resposta da Superestrutura são calculadas as frequências naturais de
resposta da superestrutura quanto às fontes de excitação, sendo esta a mais

40
importante vibração nociva que deve ser evitada. Na seção 7 encontram-se as
fórmulas empíricas que foram utilizadas na planilha para realização dos cálculos.
Os dados de entrada são referentes à superestrutura da embarcação e são eles:
constante da mola, comprimento, massa, raio de giração, altura, número de anteparas
longitudinais, espessura das anteparas, área de cisalhamento, coeficiente transversal
de cisalhamento e um fator de correção. Destes parâmetros podemos citar que a
constante da mola, o raio de giração, a área de cisalhamento e o fator de correção são
estipulados pela Referência [7]. O comprimento da superestrutura, a massa, a altura, o
número de anteparas e suas espessuras são determinados pelo usuário e podem ser
obtidos, numa fase inicial de projeto, através de embarcações semelhantes. O
coeficiente transversal de cisalhamento é uma constante.
Assim, são estimadas as frequências naturais de rotação e cisalhamento da
superestrutura e, por fim, sua frequência natural de resposta.
8.7. Aba Avaliação de Ressonância
De acordo com a Tabela 2.1 deste trabalho, existe uma relação entre as fontes de
excitação e os itens de resposta. Assim, nesta aba é feita uma avaliação da
possibilidade de ressonância entre os componentes principais da embarcação.
Os dados de entrada são as frequências calculadas em toda a planilha. Estas
frequências foram consideradas através de uma faixa de .

41
9. Estudo de Caso e Resultados
Afim de validar a planilha desenvolvida neste trabalho, descrita no capítulo anterior,
serão estudadas duas embarcações de diferentes tipos de modo a verificar se a
planilha se comporta satisfatoriamente.Todas as embarcações e seus respectivos
dados foram retirados da Referência [13].
Para todas as embarcações serão definidas a excitação dos motores, linha de eixo e
propulsor, e a resposta da viga navio e da superestrutura, bem como uma investigação
da possibilidade de ressonância.
9.1. Navio Petroleiro
Um navio dos navios estudados foi o petroleiro apresentado na Figura 9.1 com os
dados mostrados na Tabela 9.1. Este navio possui 8 tanques de carga e 5 tanques de
lastro.
Figura 9.1 – Embarcação de Estudo – Navio Petroleiro
Fonte: OMAE 32 [13]
Tabela 9.1 – Dados Principais do Navio Petroleiro
42
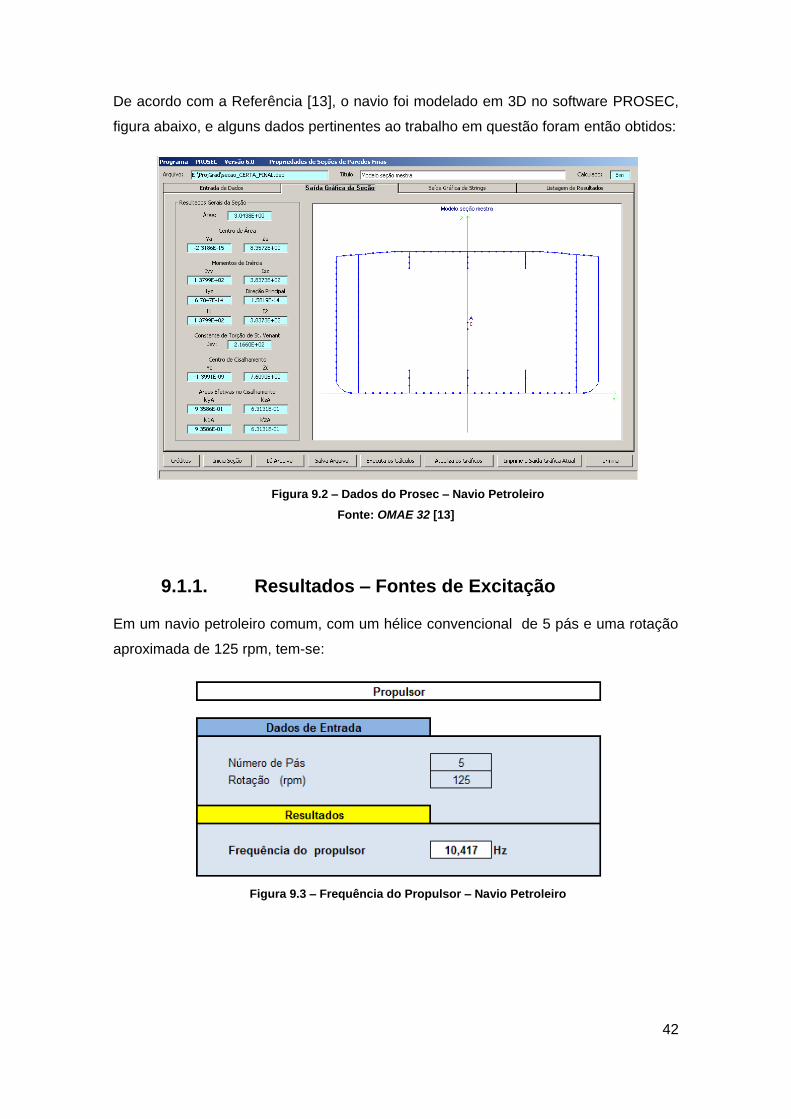
De acordo com a Referência [13], o navio foi modelado em 3D no software PROSEC,
figura abaixo, e alguns dados pertinentes ao trabalho em questão foram então obtidos:
Figura 9.2 – Dados do Prosec – Navio Petroleiro
Fonte: OMAE 32 [13]
9.1.1. Resultados – Fontes de Excitação
Em um navio petroleiro comum, com um hélice convencional de 5 pás e uma rotação
aproximada de 125 rpm, tem-se:
Figura 9.3 – Frequência do Propulsor – Navio Petroleiro

43
E sua respectiva frequência no motor:
Figura 9.4 – Frequência do Motor – Navio Petroleiro
Através de uma estimativa da massa total do eixo, encontra-se também a frequência
longitudinal do eixo:
Figura 9.5 – Frequência do Eixo Propulsor – Navio Petroleiro
9.1.2. Resultados – Pressão Induzida na Popa
A pressão que o propulsor induz na popa do petroleiro pode ser então encontrada:
Figura 9.6 – Pressão Induzida na Popa pelo Propulsor – Navio Petroleiro

44
9.1.3. Resultados – Resposta da Viga Navio
Através do cálculo da inércia vertical da embarcação pelo programa PROSEC pôde-se
estimar a resposta da viga navio da embarcação:
Figura 9.7 – Dados de Entrada para Resposta da Viga Navio – Navio Petroleiro
Vale lembrar que para os modos mais elevados a precisão é significativamente
reduzida devida, principalmente, a distribuição de massa e a rigidez.
Figura 9.8 – Frequências de Resposta da Viga Navio – Navio Petroleiro
9.1.4. Resultados – Resposta da Superestrutura
Através de estimativas de componentes da supererestrutura de um navio petroleiro
como, massa, altura, comprimento, quantidade e espessura das anteparas
longitudinais, pôde-se estimar a frequência natural da superestrutura.

45
Figura 9.9 – Frequência Natural da Superestrutura – Navio Petroleiro
9.1.5. Resultados – Avaliação da Ressonância
Após o cálculo das frequências naturais dos principais componentes do navio
petroleiro é necessária uma avaliação sobre a possibilidade de ressonância entre os
mesmos. Para isso, foi utilizada como base a Tabela 2.1 deste trabalho onde as
relações de excitação e resposta estão expostas. Foi utilizada uma faixa de frequência
de .
No caso do navio petroleiro não há ressonância através da excitação do propulsor. As
faixas de frequências naturais do propulsor e da superestrutura não se encontram.
Além disso, a pressão induzida pelo propulsor na popa do navio é inferior à máxima
admissível.

46
Figura 9.10 – Avaliação de Ressonância do Propulsor – Navio Petroleiro
No presente caso, a planilha não aponta ressonância entre o motor e o primeiro modo
da viga navio.
Figura 9.11 – Avaliação de Ressonância do Motor – Navio Petroleiro
No caso do navio petroleiro não há ressonância através da excitação do eixo
propulsor. As faixas de frequências naturais do eixo, da superestrutura e do primeiro
modo da viga navio não se encontram.

47
Figura 9.12 – Avaliação de Ressonância do Eixo Propulsor – Navio Petroleiro
9.1.6. Resultados – Comparação Elementos Finitos 1D e 3D
De acordo com a Referência [13], o navio foi modelado em 1D e 3D no software
NASTRAN e suas frequências naturais foram então obtidas. Na figura abaixo têm-se o
navio petroleiro no primeiro modo de vibração nas duas modelagens:
Figura 9.13 – Modelo 3D e 1D – Navio Petroleiro no 1º Modo de Vibração
Fonte: OMAE 32 [13]
Tabela 9.2 – Frequências Naturais do Modelo 3D do Navio Petroleiro
Fonte: OMAE 32 [13]
48
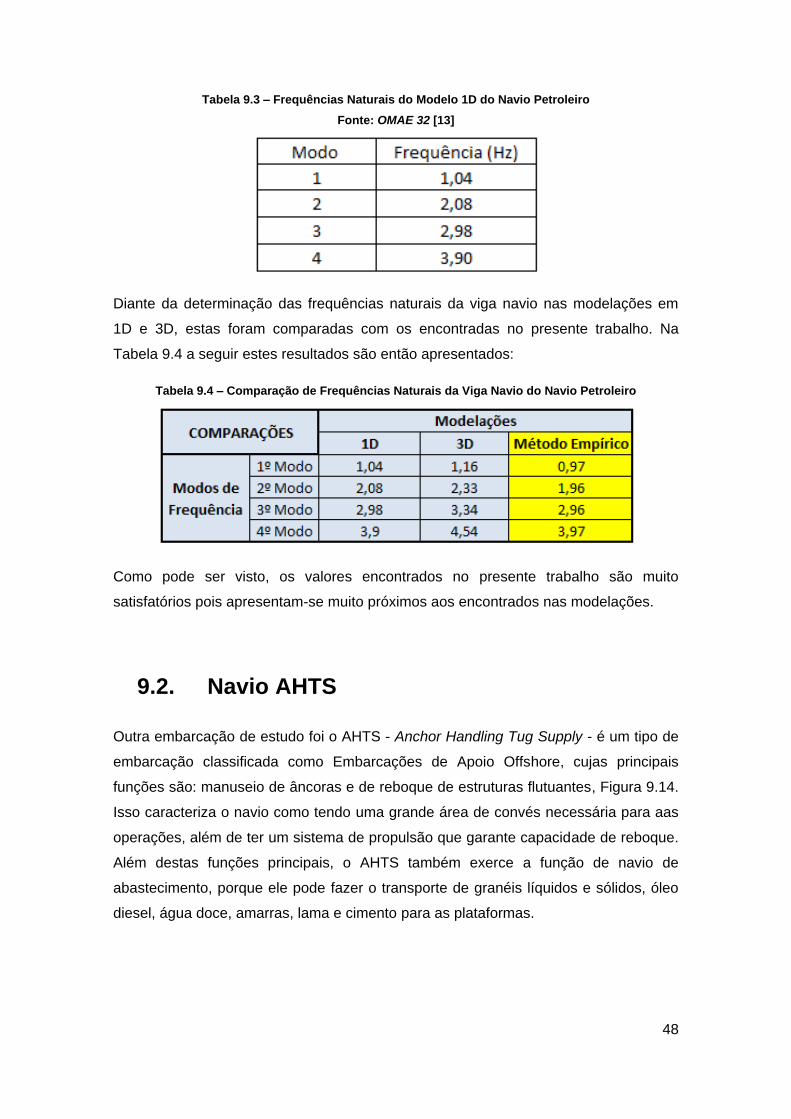
Tabela 9.3 – Frequências Naturais do Modelo 1D do Navio Petroleiro
Fonte: OMAE 32 [13]
Diante da determinação das frequências naturais da viga navio nas modelações em
1D e 3D, estas foram comparadas com os encontradas no presente trabalho. Na
Tabela 9.4 a seguir estes resultados são então apresentados:
Tabela 9.4 – Comparação de Frequências Naturais da Viga Navio do Navio Petroleiro
Como pode ser visto, os valores encontrados no presente trabalho são muito
satisfatórios pois apresentam-se muito próximos aos encontrados nas modelações.
9.2. Navio AHTS
Outra embarcação de estudo foi o AHTS - Anchor Handling Tug Supply - é um tipo de
embarcação classificada como Embarcações de Apoio Offshore, cujas principais
funções são: manuseio de âncoras e de reboque de estruturas flutuantes, Figura 9.14.
Isso caracteriza o navio como tendo uma grande área de convés necessária para aas
operações, além de ter um sistema de propulsão que garante capacidade de reboque.
Além destas funções principais, o AHTS também exerce a função de navio de
abastecimento, porque ele pode fazer o transporte de granéis líquidos e sólidos, óleo
diesel, água doce, amarras, lama e cimento para as plataformas.

49
Figura 9.14 – Embarcação de Estudo – Navio AHTS
Fonte: OMAE 32 [13]
Tabela 9.5 – Dados Principais do Navio AHTS
Fonte: OMAE 32 [13]
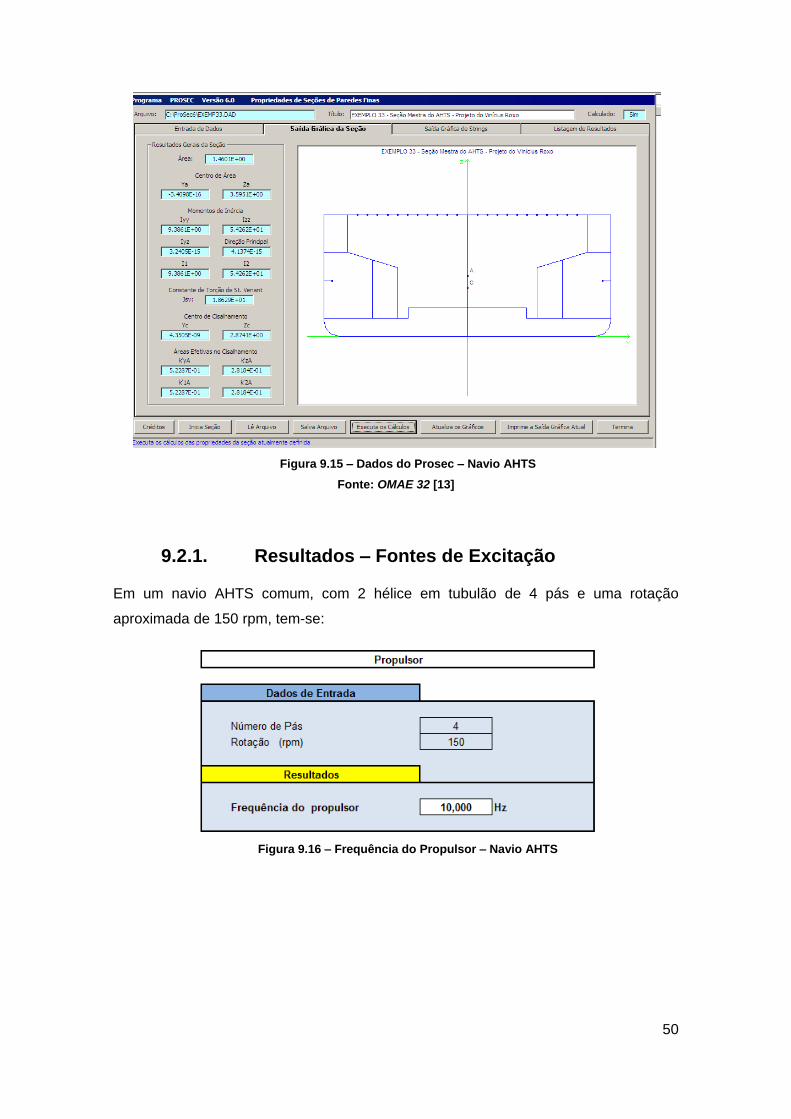
De acordo com a Referência [13], o navio foi modelado em 3D no software PROSEC,
figura abaixo, e alguns dados pertinentes ao trabalho em questão foram então obtidos:
50
Figura 9.15 – Dados do Prosec – Navio AHTS
Fonte: OMAE 32 [13]
9.2.1. Resultados – Fontes de Excitação
Em um navio AHTS comum, com 2 hélice em tubulão de 4 pás e uma rotação
aproximada de 150 rpm, tem-se:
Figura 9.16 – Frequência do Propulsor – Navio AHTS

51
E sua respectiva frequência no motor:
Figura 9.17 – Frequência do Motor – Navio AHTS
Através de uma estimativa da massa total do eixo, encontra-se também a frequência
longitudinal do eixo:
Figura 9.18 – Frequência do Eixo Propulsor – Navio AHTS
9.2.2. Resultados – Pressão Induzida
A pressão que o propulsor induz na popa do AHTS pode ser então encontrada:
Figura 9.19 – Pressão Induzida na Popa pelo Propulsor – Navio AHTS

52
9.2.3. Resultados – Resposta da Viga Navio
Através do cálculo da inércia vertical da embarcação pelo programa PROSEC pôde-se
estimar a resposta da viga navio da embarcação:
Figura 9.20 – Dados de Entrada para Resposta da Viga Navio – Navio AHTS
Vale lembrar que para os modos mais elevados a precisão é significativamente
reduzida devida, principalmente, a distribuição de massa e a rigidez.
Figura 9.21 – Frequências de Resposta da Viga Navio – Navio AHTS

53
9.2.4. Resultados – Resposta da Superestrutura
Através de estimativas de componentes da supererestrutura de um navio AHTS como,
massa, altura, comprimento, quantidade e espessura das anteparas longitudinais,
pôde-se estimar a frequência natural da superestrutura.
Figura 9.22 – Frequência Natural da Superestrutura – Navio AHTS
9.2.5. Resultados – Avaliação da Ressonância
Semelhante ao navio petroleiro, após o cálculo das frequências naturais dos principais
componentes do navio AHTS é necessária uma avaliação sobre a possibilidade de
ressonância entre os mesmos. Para isso, foi utilizada como base a Tabela 2.1 deste
trabalho onde as relações de excitação e resposta estão expostas. Foi utilizada uma
faixa de frequência de .
No caso do navio AHTS há ressonância através da excitação do propulsor. As faixas
de frequências naturais do propulsor aqui estimado e da superestrutura se encontram
e desta forma, a solução seria a mudança na rotação do propulsor. Em relação à
pressão induzida pelo propulsor na popa do navio, esta é inferior à máxima admissível.

54
Figura 9.23 – Avaliação de Ressonância do Propulsor – Navio AHTS
No que se refere a excitação causada pelo motor do navio AHTS a planilha aponta
uma possível ressonância entre o motor e o primeiro modo da viga navio. Isto
acontece pois, a frequência do motor foi calculada com base na frequência do
propulsor. Assim, este problema logo é resolvido com a utilização de motores em
frequências mais elevadas em conjunto com caixas redutoras, o que normalmente
acontece nesse tipo de embarcação.
Figura 9.24 – Avaliação de Ressonância do Motor – Navio AHTS
Em relação ao eixo propulsor, no caso do navio AHTS não há ressonância através da
excitação. As faixas de frequências naturais do eixo, da superestrutura e do primeiro
modo da viga navio não se encontram.

55
Figura 9.25 – Avaliação de Ressonância do Eixo Propulsor – Navio AHTS
9.2.6. Resultados – Comparações
De acordo com a Referência [13], foram realizados testes de vibração no navio. Além
disso, o mesmo foi modelado em 3D no software NASTRAN e suas frequências
naturais foram então obtidas.
A Figura 9.26 mostra os resultados de vibrações verticais do casco do navio, tal como
medido por um acelerômetro situado na popa do navio. Os valores são apresentados
sob a forma de um gráfico da amplitude da velocidade de vibração como uma função
da frequência.
Figura 9.26 – Frequências Naturais da Viga Navio medidas por Acelerômetro – Navio AHTS
Fonte: OMAE 32 [11]
O navio AHTS também foi modelado em 3D em elementos finitos para que sua
frequência natural também fosse estimada dessa forma, como mostrado na figura
abaixo:

56
Figura 9.27 – Modelo 3D – Navio AHTS no 1º Modo de Vibração
Fonte: OMAE 32 [13]
Tabela 9.6 – Frequências Naturais do Modelo 3D do Navio AHTS
Fonte: OMAE 32 [13]
Diante da determinação das frequências naturais da viga navio nas medições e na
modelação em 3D, estas foram comparadas com as encontradas no presente
trabalho. Na Tabela 9.7 a seguir estes resultados são então apresentados:
Tabela 9.7 – Comparação de Frequências Naturais da Viga Navio do Navio AHTS
Como pode ser visto, os valores encontrados no presente trabalho são muito
satisfatórios pois apresentam-se muito próximos aos encontrados nas medições e na
modelação.

57
10. Conclusões e Recomendações
Ao longo de todo o trabalho buscava-se um método simples, preliminar e eficiente
para determinação de vibrações em navios.
Através da seleção e determinação dos parâmetros do propulsor e do motor, a planilha
aqui desenvolvida se mostrou capaz de, numa fase inicial de projeto, dar boas
estimativas quanto as frequências naturais dos principais componentes do navio. Além
disso, esta também avalia possíveis ressonâncias entre itens de excitação e de
resposta. O que torna o trabalho desenvolvido satisfatório.
É importante salientar que, apesar de terem sido encontrados bons resultados para o
caso do navio AHTS, esse método de estimativa através de fórmulas empíricas e,
principalmente, a planilha aqui desenvolvida deve ser utilizada para estimativas de
frequências de navios de deslocamento. Isto porque, todo o trabalho que foi
desenvolvido para enfim chegar a estas fórmulas foi baseado em navios deste tipo.
Para a utilização em outros tipos de navios, estas fórmulas precisam sofrer alguns
ajustes.
Para os trabalhos futuros algumas recomendações devem ser levadas em conta. Para
o cálculo da massa adicional na estimativa da frequência da viga navio, por exemplo,
foi desenvolvida uma fórmula mais precisa e ajustada, contida na Referência [14]. É
preciso melhorar também, a fórmula para o cálculo dos modos mais elevados de
frequência da viga navio.

58
11. Bibliografia
1. Proceedings, Ship Vibration Symposium, SNAME and Ship Structure Committee,
Washington, D.C.,1978.
2. Proceedings, Seventh International Ship Structure Congress (SISSC), Committee
II.4, Steady State Dynamic Loading and Response, Paris, Aug. 1979.
3. Proceedings, Euromech Colloquium 122, Numerical Analysis of the Dynamics of
Ship Structures, Association Technique Maritime Aeronautique (ATMA), Paris,
Sept. 1979.
4. Proceedings, Symposium on Propeller Induced Ship Vibration, INA, London, Dec.
1979.
5. Guidance Notes on Ship Vibration, American Bureau of Shipping, April, 2006.
6. Raestad, A E , “Propeller Loading Tranferred to Shaft ean Values and Standard
Deviations,” Det norske Veritas Report No. 4-06-M, Oslo, Norway, 1977.
7. Johannessen, H , “Guidelines for Prevention of Excessive Ship Vibration,” SNAME
Transactions, Jan. 1980
8. Huse, E , “Pressure Pulses from Cavitating Propeller,” Nordic Ship Technical
Meeting, NSTM, Abo, Finlândia, 1977.
9. Ship Vibration Handbook, Det Norske Veritas, Oslo, Norway, 1980.
10. Kumai, T , “On the Estimation of Natural requencies of Vertical Vibration of Ships,”
Reports of Research Institute for Applied Mechanics, Vol. 16, No. 54, 1968.
11. Holtrop, J. and ennen, G G J , “An approximate power prediction method”,
International Shipbuilding Progress, Vol. 29, July 1982.
12. Oosterveld, W C and Oossanen, P van, “ urther computer analysed data of the
Wageningem B-screw series”, International Shipbuilding Progress, July 1975.
13. Proceedings, 32nd International Conference on Ocean, Effective Shear Area in
One Dimensional Ship Hull Finite Element Models to Predict Natural Frequencies

59
of Vibration, Offshore and Arctic Engineering (OMAE 32), France, Jun. 2013.
14. Ramscheid, F., Modelo Numérico Unidimensional para Análise de Vibração
do Casco de um Navio Petroleiro, Coppe UFRJ, Set. 2012.

60