8 – equações de estadowebx.ubi.pt/~felippe/texts/contr_systems_text08p.pdf · 8.2 – a...
TRANSCRIPT
J. A. M. Felippe de Souza 8 – Equações de Estado
1
8 – Equações de Estado
8.1 – Representação por Variáveis de Estado 3
Exemplos 4
Exemplo 8.1 4
Exemplo 8.2 6
Exemplo 8.3 6
Exemplo 8.4 8
Matriz na forma companheira 10
Exemplos 11
Exemplo 8.5 11
Exemplo 8.6 12
8.2 – A equação característica e os polos do sistema 14
Exemplos 14
Exemplo 8.7 14
Exemplo 8.8 15
Exemplo 8.9 15
Exemplo 8.10 15
8.3 – Representações Equivalentes 16
Exemplos 17
Exemplo 8.11 17
Exemplo 8.12 19
Exemplo 8.13 20
Exemplo 8.14 22
Exemplo 8.15 24
J. A. M. Felippe de Souza 8 – Equações de Estado
2
8.4 – Transformação Função de Transferência para Equações de Estado 26
Exemplos 26
Exemplo 8.16 26
Exemplo 8.17 27
Exemplo 8.18 28
8.5 – Simulação Analógica 29
Exemplos 30
Exemplo 8.19 30
Exemplo 8.20 30
Exemplo 8.21 30
Exemplo 8.22 31
Exemplo 8.23 32
Exemplo 8.24 33
8.6 – Conversão de Equação de Estado para Função de Transferência 34
Observação 35
Exemplos 36
Exemplo 8.25 36
Exemplo 8.26 37
Exemplo 8.27 38
Exemplo 8.28 39
Exemplo 8.29 40
Múltiplas entradas e múltiplas saídas 41
Exemplo 8.30 43
J. A. M. Felippe de Souza 8 – Equações de Estado
3
Equações de Estado 8.1 – Representação por Variáveis de Estado Já vimos no capítulo 3 (“Representação de Sistemas”) uma forma de representar sistemas (lineares e invariantes no tempo) através de uma função de transferência que relaciona diretamente a entrada (input) com a saída (output). Aqui veremos uma outra forma de representar sistemas com o uso de variáveis inter-nas ao sistema (variáveis de estado). Com as variáveis de estado se constrói um sis-tema de equações diferenciais de 1ª ordem que são chamadas de “equações de estado”. A representação de um sistema em equações de estado considera variáveis internas
� = �����⋮���
o “estado”. Normalmente � terá componentes, sendo a ordem do sistema. (A dimensão do vetor � poderá eventualmente ser maior que ordem do sistema, mas neste caso haverá equações redundantes).
S variáveis de estado
u
(entrada)
y
(saída)

J. A. M. Felippe de Souza 8 – Equações de Estado
4
Para sistemas lineares e invariantes no tempo de ordem as equações de estado têm a forma � = �� + � , ��0� = �� � = �� + �� onde
A é uma matriz ×
B é uma matriz × �
C é uma matriz � ×
D é uma matriz � × �
p = número de entradas
q = número de saídas
No caso de sistemas com apenas uma entrada u(t), i.e., p = 1 e uma saída y(t) i.e., q = 1, temos que
= �����⋮��� , � = ��� �� … ��! " � = �#�!
ou seja, neste caso B é um vetor coluna, C é um vetor linha e D é uma constante d1 (ou seja, D é uma matriz 1 x 1). Exemplo 8.1: Sistema carro-massa-mola
A equação diferencial ordinária (EDO) que descreve este sistema, conforme já visto no capítulo 2 (“Modelização de Sistemas”) é dada por:
eq. (7.1)

J. A. M. Felippe de Souza 8 – Equações de Estado
5
$ #��#%� + & #�#% + '��%� = ��%�
Neste exemplo, se definirmos a variável de estado � = ( ���� ) onde ���%� = ��%� = �*+,çã* #* �/00* * ,+%/%" %, ���%� = ��%� = 1"2*�,#/#" #* �/00* * ,+%/%" %. então o par ��%� = 4 ���%����%�5
representa o estado interno do sistema. Por exemplo, se ��0� = �� = ( 0 −3 ), então isso significa que no instante t = 0 o “estado” do sistema é o carro passando pela origem (���0� = 0) com velocidade – 3m/s, ou seja 3m/s para trás (���0� = −3).
Com a definição de � = 89:9;< acima temos
�� = � = ��
�� = �= = − '$ � − &$ � + 1$ �
e, como �� = � e �� = � , então �� = �� �� = − '$ �� − &$ �� + 1$ � � = ��

J. A. M. Felippe de Souza 8 – Equações de Estado
6
logo, � = ( 0 1−'/$ −&/$) � + ( 01/$) � � = � 1 0 ! � que é a representação deste sistema em equações de estado na forma eq. (8.1). Note que neste caso D = 0. Exemplo 8.2:
Agora, considerando o sistema carro-massa-mola do exemplo anterior com $ = 1 & = 5 ' = 4 então � = 8 0 1−4 −5< � + 801< � � = � 1 0 ! � + �0! �
Exemplo 8.3: Considere um sistema descrito pela equação diferencial ordinária (EDO)
u3y5y4y =′+′′+′′′
cuja a função de transferência é dada por:
s5s4s
3
)5s4s(s
3)s(U)s(Y
23
2
++=
++⋅=
C
A B
A B
C D
� = 0
J. A. M. Felippe de Souza 8 – Equações de Estado
7
Neste caso define-se as variáveis de estado como:
⋅=
⋅=
++⋅==
)()(
)()(
54
)(3)()(
2
3
2
231
sYssX
sYssX
sss
sUsYsX
o que implica que:
⇒⇒⇒⇒
⋅=⋅+⋅+⋅
=⋅
=⋅
)(3)(5)(4)(
)()(
)()(
11
2
1
3
31
2
21
sUsXssXssXs
sXsXs
sXsXs
Mas,
)s(Xs)s(Xs 21
2 ⋅=⋅ e
)()( 31
3sXssXs ⋅=⋅
logo,
⇒⇒⇒⇒
⋅=⋅+⋅+⋅
=⋅
=⋅
)(3)(5)(4)(
)()(
)()(
11
2
3
32
21
sUsXssXssXs
sXsXs
sXsXs
e como )s(X)s(Xs 21 =⋅ e )s(X)s(Xs 31
2 =⋅ , temos que:
⇒⇒⇒⇒
=
⋅+⋅+⋅+⋅
=⋅
=⋅
)()(
)(3)(4)(5)(
)()(
)()(
1
323
32
21
sXsY
sUsXsXsXs
sXsXs
sXsXs
e portanto,

J. A. M. Felippe de Souza 8 – Equações de Estado
8
⇒
=
⋅+⋅−⋅−=⋅
=⋅
=⋅
)()(
)(3)(4)(5)(
)()(
)()(
1
323
32
21
sXsY
sUsXsXsXs
sXsXs
sXsXs
e desta formas obtemos as equações de estado do sistema:
[ ]
=
+
−−
=
xy
uxx
001
3
0
0
450
100
010
&
Note que as matrizes A, B, C e D são neste caso:
−−
=
450
100
010
A
=
1
0
0
B [ ]001=C e D = 0
Exemplo 8.4: Considere um sistema descrito pela equação diferencial ordinária (EDO) #��#%� + /� #�B��#%�B� + ⋯ + /�B� #�#% + /���%� = �� ��%�
É fácil de se notar que a função de transferência deste sistema é dada por D�+�E�+� = ��+� + /�+�B� + ⋯ + /�B�+ + /�
J. A. M. Felippe de Souza 8 – Equações de Estado
9
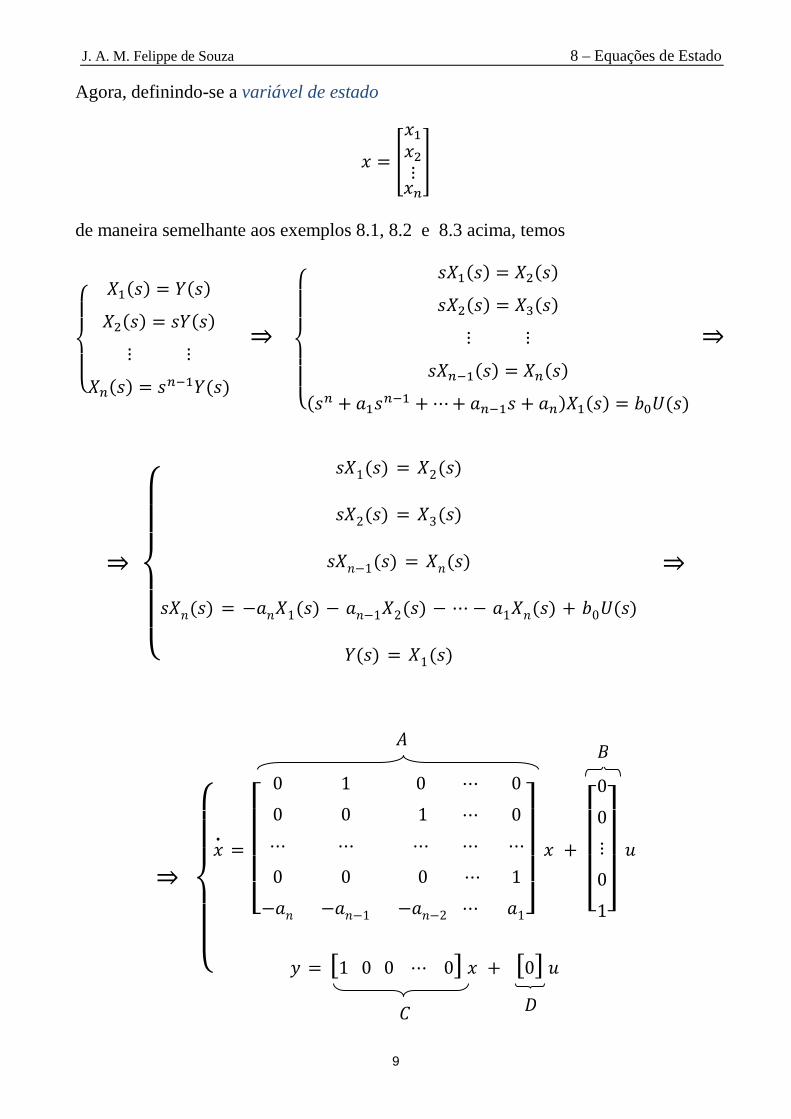
Agora, definindo-se a variável de estado
� = �����⋮���
de maneira semelhante aos exemplos 8.1, 8.2 e 8.3 acima, temos
FGHGI J��+� = D�+�J��+� = +D�+�⋮ ⋮J��+� = +�B�D�+�
⇒ FGGHGGI
+J��+� = J��+�+J��+� = JL�+�⋮ ⋮+J�B��+� = J��+��+� + /�+�B� + ⋯ + /�B�+ + /��J��+� = ��E�+� ⇒
⇒ FGGHGGI +J1�+� = J2�+�
+J2�+� = J3�+�+J−1�+� = J�+�
+J�+� = −/J1�+� − /−1J2�+� − ⋯ − /1J�+� + �0E�+�D�+� = J1�+�
⇒
⇒ FGGHGGI� =
NOOOP 0 1 0 0 0 1⋯ ⋯ ⋯ 0 0 0−/ −/−1 −/−2
⋯ 0⋯ 0⋯ ⋯ ⋯ 1⋯ /1QRR
RS � + NOOOP00⋮01QRR
RS �
� = �1 0 0 ⋯ 0! � + �0! �
A B
C D

J. A. M. Felippe de Souza 8 – Equações de Estado
10
Matriz na forma companheira A matriz A deste exemplo 8.4 acima é dita estar na forma companheira. Note que ela tem
a) os elementos acima da diagonal principal têm todos o valor ‘1’ (um);
b) a última linha é constituída dos coeficientes do polinómio característico de A
��+� = +� + /�+�B� + ⋯ + /�B�+ + /�
com os sinais trocados e na ordem inversa;
além disso,
c) os demais elementos são todos igual a ‘0’ (zero).
Uma matriz quadrada (n x n) A que satisfaz as propriedades (a), (b) e (c) acima é dita estar na forma companheira. Observe que as matrizes A do exemplos 8.1, 8.2 e 8.3, também estão ambas na forma companheira. Se o polinómio característico de uma matriz quadrada (n x n) A tem o coeficiente de seu termo de mais alto grau um valor ao ≠ 0, ou seja, ��+� = /T+� + /�+�B� + ⋯ + /�B�+ + /� então a matriz A na forma companheira terá a forma mais geral:
−
−
−
−
−
=
−−−
oo
n
o
n
o
n
o
n
a
a
a
a
a
a
a
a
a
a
A
1321
10000
01000
00100
00010
L
L
MMMMMM
L
L
L

J. A. M. Felippe de Souza 8 – Equações de Estado
11
No caso particular, mas bastante comum, de ao = 1, a matriz A na “forma companheira” tem o seguinte aspeto:
−−−−−
=
−−− 13n2n1nn aaaaa
10000
01000
00100
00010
A
L
L
MMMMMM
L
L
L
onde, a1 , … , an-1 , an , são os coeficientes da equação característica p(s)
n1n2n
21n
1n asasasas)s(p +++++= −
−−L
Exemplo 8.5: Se a equação diferencial ordinária (EDO) também tivesse derivadas de u, a escolha acima não seria apropriada. Considere o sistema descrito por: �= + 2� + 2� = � + 2� A função de transferência do sistema é: D�+�E�+� = �+ + 2�+� + 2+ + 2
Define-se neste caso:
FGHGIJ��+� = E�+�+� + 2+ + 2
J��+� = + E�+�+� + 2+ + 2 ⇒ U +J��+� = J��+�
+�J��+� + 2+J��+� + 2J��+� = E�+� ⇒
S u(t) y(t)

J. A. M. Felippe de Souza 8 – Equações de Estado
12
⇒ V +J1�+� = J2�+�+J2�+� = −2J1�+� − 2J2�+� + E�+�D�+� = 2J1�+� + J2�+� ⇒ W� = 8 0 1−2 −2< � + 801< �
� = �2 1! � + �0! �
e portanto: � = 8 0 1−2 −2< ,B= 801< ,C=�2 1! e � = �0! e observe que aqui novamente a matriz A deste exemplo está na forma companheira, pois a equação característica do sistema é: ��+� = +� + 2+ + 2 Exemplo 8.6:
Considere o sistema cuja função de transferência é dada por: D�+�E�+� = 2+� + 7+ + 3+� + 4+ − 2
Neste caso o sistema é de segunda ordem, logo tem 2 polos, mas como o numerador da função de transferência tem o mesmo grau que o denominador, o sistema também tem 2 zeros. Primeiramente, dividindo-se o numerador pelo denominador: 2+� + 7+ + 3 +� + 4+ − 2
−2+� − 8+ + 4 2
−+ + 7 Obtemos o quociente de 2 e resto s+7. Logo, D�+�E�+� = 2+� + 7+ + 3+� + 4+ − 2 = 2 + −+ + 7+� + 4+ − 2
A B
C D
J. A. M. Felippe de Souza 8 – Equações de Estado
13
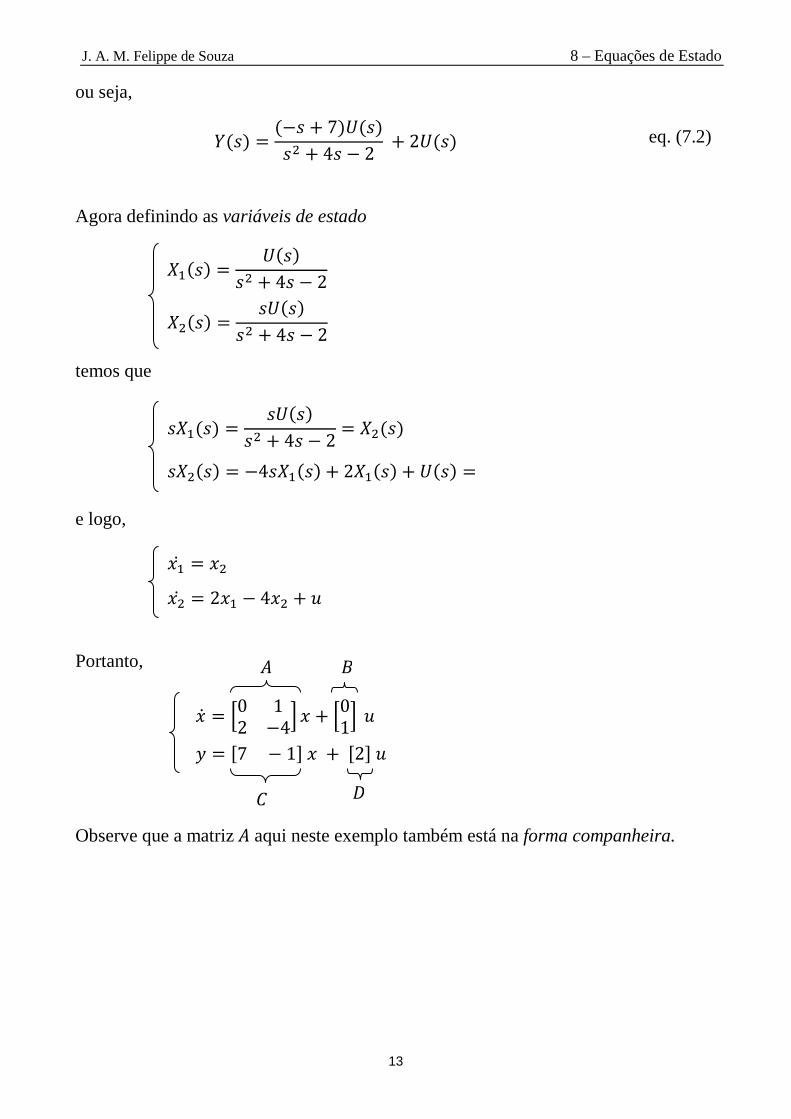
ou seja, D�+� = �−+ + 7�E�+�+� + 4+ − 2 + 2E�+� eq. (7.2)
Agora definindo as variáveis de estado J��+� = E�+�+� + 4+ − 2
J��+� = +E�+�+� + 4+ − 2
temos que +J��+� = +E�+�+� + 4+ − 2 = J��+�
+J��+� = −4+J��+� + 2J��+� + E�+� =
e logo, �� = �� �� = 2�� − 4�� + � Portanto, � = 80 12 −4< � + 801< � � = �7 − 1! � + �2! � Observe que a matriz A aqui neste exemplo também está na forma companheira.
C D
A
C
B

J. A. M. Felippe de Souza 8 – Equações de Estado
14
8.2 – A equação característica e os polos do sistema
Um sistema descrito na forma de equação de estados [eq. (8.1)]: � = �� + � � = �� + �� tem o seu polinómio característico dado por: ��+� = det �+] − ��
Já os polos do sistema são os “autovalores”(ou “valores próprios”) de A, podendo ser repetidos, i.e., duplos, triplos, etc. Como é sabido, os autovalores de A são as raízes do polinómio característico ��+� =det �+] − ��. Exemplo 8.7: Observe que para o sistema do exemplo 8.2 acima, o polinómio característico é dado por:
��+� = det�+] − �� = #"% � + −1_̂ `+ + a_b� =
= +� + &$ + + '$
e, no caso de m = 1, & = 5 e k = 4 ��+� = $+� + &+ + ' = +� + 5+ + 4
Logo, a equação característica pode ser escrita como: +� + 5+ + 4 = 0 e para encontrar os polos, calcula-se as raízes de p(s), ou seja, os autovalores de A
c� = −1 e c� = −4
Observe que a polinómio característico p(s) e os polos c� " c� obtidos aqui são os mesmos que os obtidos através da função de transferência.
S u(t) y(t)

J. A. M. Felippe de Souza 8 – Equações de Estado
15
Exemplo 8.8: Para o sistema do exemplo 8.4 acima, o polinómio característico é: ��+� = det�+] − �� =
= #"%NOOOP + −1 0 0 + −1⋯ ⋯ ⋯ 0 0 0/� /�B� /�B�
⋯ 0⋯ 0⋯ ⋯ ⋯ −1⋯ �+ + /��QRR
RS
= +� + /�+�B� + /�+�B� + ⋯ + /�B�+ + /T
e os polos dos sistema (autovalores de A) são as n raízes de p(s), podendo ser repeti-das, i.e., duplas, triplas, etc. Exemplo 8.9:
Para o sistema do exemplo 8.5 acima, o polinómio característico é: ��+� = det (+ −12 �+ + 2�) = +� + 2+ + 2
e os polos dos sistema (autovalores de A) são: c� = −1 + d c� = −1 − d Exemplo 8.10: Para o sistema do exemplo 8.6 acima, o polinómio característico é: ��+� = det ( + −1−2 �+ + 4�) = +� + 4+ − 2
e os polos dos sistema (autovalores de A) são: c� = −4,45 c� = 0,45

J. A. M. Felippe de Souza 8 – Equações de Estado
16
8.3 – Representações Equivalentes Considere o sistema: � = �� + � , ��0� = �� � = �� + �� cuja variável de estado é x(t). Definindo-se agora uma nova variável de estado �̅ como sendo: �̅ = f� sendo P inversível. Logo, como: �̅ = f� temos que: W � = fB��̅� = fB��̅ e substituindo na eq. (8.3) obtém-se: WfB��̅ = �fB��̅ + �� = �fB��̅ + �� ⇒ W�̅ = f�fB��̅ + f �� = �fB��̅ + ��
Portanto, a representação em Equações de Estado não é única. O sistema das equa-
ções da eq. (8.3) acima pode ser representado na forma equivalente. �̅ = �̅�̅ + g�, �̅�0� = �̅� � = �̅�̅ + �h�
�̅
g
S u(t) y(t)
�̅
�h
eq. (7.3)

J. A. M. Felippe de Souza 8 – Equações de Estado
17
onde: �̅ = f�fB� g = f �̅ = �fB� �h = � Note que a entrada u e a saída y não se alteraram. Somente a representação interna do sistema (variáveis de estado). Exemplo 8.11: Considere um sistema de 2ª ordem do exemplo 8.5, cujas equações de estado são: W� = 8 0 1−2 −2< � + 801< �
� = �2 1! � + �0! �
Portanto, a variável de estado original é: � = (����)
Agora, escolhendo-se, f = 80 11 0< temos que �̅ = f� = (����)
Ou seja, a nova variável de estado �̅ é a antiga variável de estado x com a ordem das componentes trocadas. Calculando �̅, g, �̅ " �h pela eq. (8.5) obtemos
−−=
⋅
−−⋅
== −
01
22
01
10
22
10
01
10PAPA
1
eq. (7.4)

J. A. M. Felippe de Souza 8 – Equações de Estado
18
=
⋅
==
0
1
1
0
01
10PBB ,
[ ] [ ]2101
10121 =
⋅== −CPC ,
e
0== DD e desta forma, as equações de estado abaixo
[ ]
=
+
−−=
xy
uxx
21
0
1
01
22&
são uma representação diferente do mesmo sistema. Observe que a matriz P deste exemplo é igual a própria inversa:
== −
01
10PP 1
Note também que:
P = P–1 ⇒ P·P–1 = P·P = P2
mas P·P-1 = I , logo,
P2 = I Estas matrizes são chamadas de idem potentes.
�̅
g
�̅
�h = 0
J. A. M. Felippe de Souza 8 – Equações de Estado
19
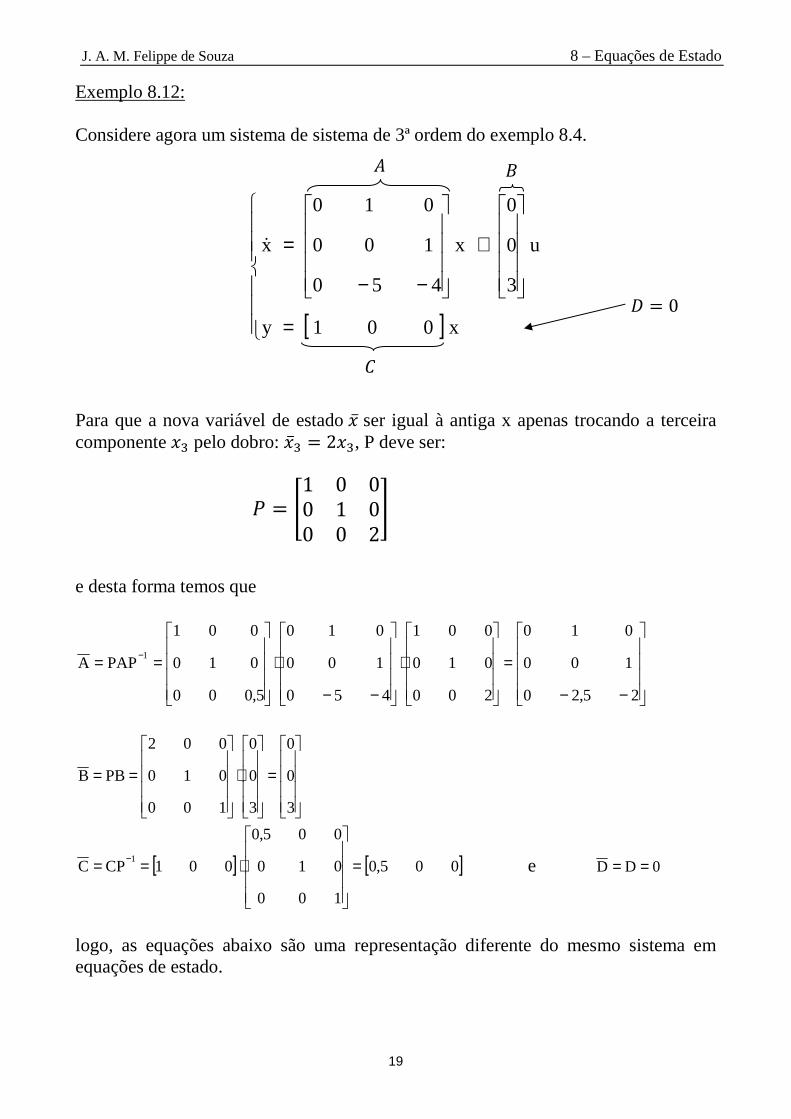
Exemplo 8.12: Considere agora um sistema de sistema de 3ª ordem do exemplo 8.4.
[ ]
=
+
−−
=
x001y
u
3
0
0
x
450
100
010
x&
Para que a nova variável de estado �̅ ser igual à antiga x apenas trocando a terceira componente �L pelo dobro: �̅L = 2�L, P deve ser:
f = i1 0 00 1 00 0 2j
e desta forma temos que
−−
=
⋅
−−
⋅
== −
25,20
100
010
200
010
001
450
100
010
5,000
010
001
PAPA1
=
⋅
==
3
0
0
3
0
0
100
010
002
PBB
[ ] [ ]005,0
100
010
005,0
001CPC1 =
⋅== − e 0DD ==
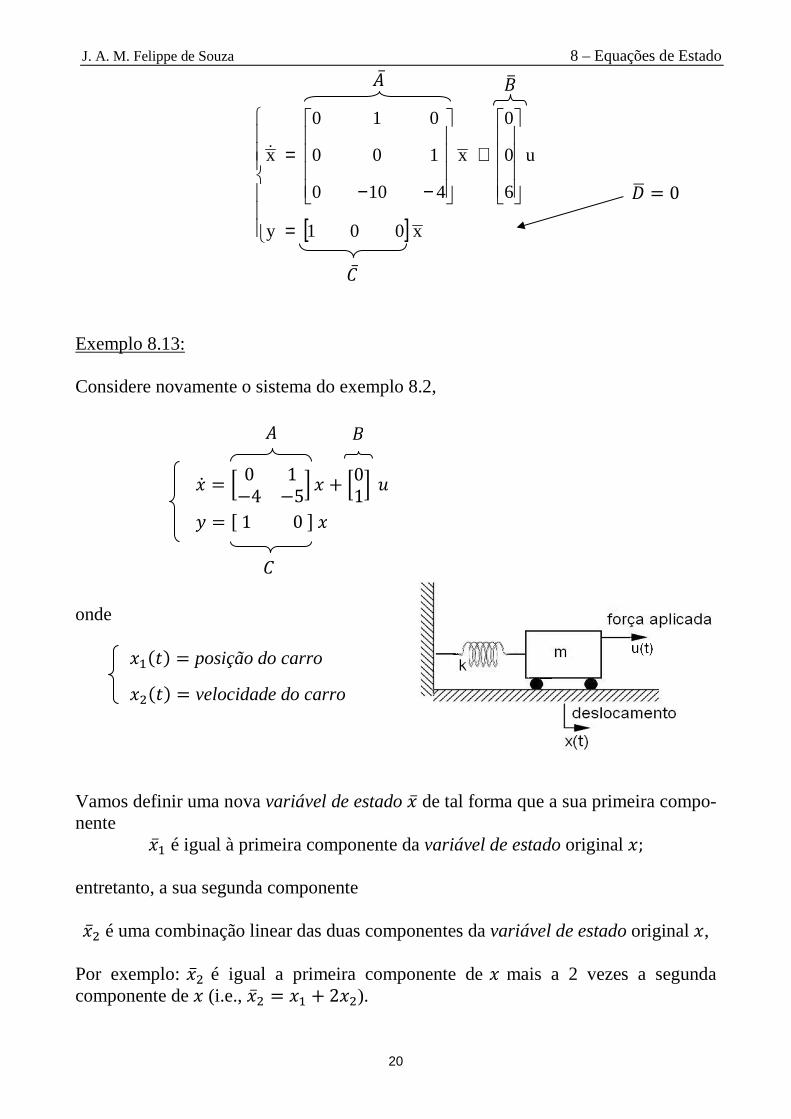
logo, as equações abaixo são uma representação diferente do mesmo sistema em equações de estado.
A B
C
� = 0
J. A. M. Felippe de Souza 8 – Equações de Estado
20
[ ]
=
+
−−
=
x001y
u
6
0
0
x
4100
100
010
x&
Exemplo 8.13: Considere novamente o sistema do exemplo 8.2, � = 8 0 1−4 −5< � + 801< � � = � 1 0 ! �
onde ���%� = posição do carro ���%� = velocidade do carro
Vamos definir uma nova variável de estado �̅ de tal forma que a sua primeira compo-nente �̅� é igual à primeira componente da variável de estado original �; entretanto, a sua segunda componente �̅� é uma combinação linear das duas componentes da variável de estado original �, Por exemplo: �̅� é igual a primeira componente de � mais a 2 vezes a segunda componente de � (i.e., �̅� = �� + 2��).
A B
C
�̅
g
�̅
�h = 0

J. A. M. Felippe de Souza 8 – Equações de Estado
21
Logo, a nova variável de estado: �̅ = (�̅��̅�)
será dada por: �̅��%� = ���%� �̅��%� = ���%� + 2���%� então, �̅ = f� com a matriz P sendo: f = 81 01 2< Esta matriz P é claramente inversível com a inversa fB� dada por: fB� = 8 1 0−0,5 0,5< e portanto podemos calcular �̅, g " �̅ pelas relações em eq. (8.5) obtendo-se: �̅ = f�fB� = (−0,5 0,5−3,5 −4,5)
g = f = 802< �̅ = �fB� = �1 0! �h = � = 0
e o sistema pode ser reescrito de forma equivalente como:
V�̅ = (−0,5 0,5−3,5 −4,5) �̅ + 802< �� = �1 0! �
�̅ g
�̅

J. A. M. Felippe de Souza 8 – Equações de Estado
22
Exemplo 8.14: Para o sistema do exemplo anterior, vamos calcular a matriz P que transforma A em �l dado por: �l = 8−1 00 −4< que é a forma diagonalizada de A, uma vez que os elementos da diagonal, ou seja –1 e –4, são os autovalores de A. Portanto, pela eq. (8.4), �l = f�fB�
que equivale a, �lf = f�
ou seja, 8−1 00 −4< 8/ �� #< = 8/ �� #< 8 0 1−4 −5< Note que aqui nós definimos P como f = 8/ �� #<. Resolvendo esta equação matricial obtemos um sistema de 4 equações com 4 incóg-nitas: a, b, c e d.
FGHGI −/ = −4�−4� = −4#−� = / − 5�−4# = � − 5#
⇒ W/ = 4�� = #
Observe que este sistema não tem uma única solução pois as 4 equações se reduzem, por redundância, a apenas duas. Uma das formas que podemos escrever a solução é �/ � � #! = �/ � //4 �!, / ≠ 0, � ≠ 0.
P P A �l
J. A. M. Felippe de Souza 8 – Equações de Estado
23
Logo, a escolha de P não é única: f = 4/ //4� � 5 , / ≠ 0; � ≠ 0
Agora, se escolhermos, por exemplo, a = 4 e b = 1 temos, f = 44 11 15 ⇒ fB� = 4 1/3 −1/3−1/3 4/3 5 o que implica que, �l = f�fB� = 8−1 00 −4<
o = f = (11) �l = �fB� = �1/3 −1/3! �p = � = 0
ou seja, �̅ = 8−1 00 −4< �̅ + 811< �
� = �1/3 −1/3! � No exemplo acima nós encontramos uma forma equivalente para o sistema de tal forma que a matriz A é diagonal. Entretanto, nem sempre é possível se obter uma representação equivalente: �q = �l�q + o� � = �l�q
com �l na forma diagonal.
Quando isso é possível diz-se que a matriz A é diagonalizável.
eq. (7.5)
�l o
�l �l

J. A. M. Felippe de Souza 8 – Equações de Estado
24
Um resultado bastante conhecido da Álgebra Linear é que se uma matriz A é diagonalizável, então os elementos da sua diagonal principal são os seus próprios autovalores. Se A possui os seus n autovalores, c�, c�, ⋯ , c�
distintos, então este é um caso em que a diagonalização de A é possível. Uma forma de se obter a representação deste sistema na forma diagonalizada para A, é a seguinte: Define-se a matriz M (mudança de base) como sendo: r = �1� 1� … 1�! onde 1s = autovector associado com o autovalor cs , i = 1, 2,… (Note que esta matriz M não é única pois qualquer autovector 1s pode ser substituído por um múltiplo '1s , com ' ≠ 0 ). Escolhendo-se: f = rB� então a transformação de variáveis de estado, �q = f�
nos levará às equações de estado da eq. (8.4) acima com �l na forma diagonal. Na verdade já sabemos que �l será:
�l = f�fB� = rB��r = � c� 00 c� … 0… 0 ⋮ ⋮ 0 0 ⋱ ⋮… c��
e também sabemos que �p = �. Portanto nós só precisamos da eq. (8.4) para calcular o e �l. Exemplo 8.15:
Considere o sistema do exemplo 8.2 acima, cujos autovalores de A (calculados no exemplo 8.7) são: c� = −1 c� = −4

J. A. M. Felippe de Souza 8 – Equações de Estado
25
e os respetivos autovectores, 1� = 8 u−u< 1� = (−v4v )
Escolhendo-se, por exemplo, u = v = 1/3, temos que, r = 4 1/3 −1/3−1/3 4/3 5 = fB�
que foi a matriz P encontrada no exemplo 8.13 acima. Se entretanto escolhermos u = 1 e v = −1, teremos, r = fB� = 4 1 1−1 −45
e portanto, f = rB� = 4 4/3 1/3−1/3 −1/35 �l = f�fB� = 8−1 10 −4<
o = f = ( 1/3−1/3) �l = �fB� = �1 −2!
ou seja, �q = 8−1 00 −4< �q + ( 1/3−1/3) �
� = �1 1!�q que é uma outra representação do mesmo sistema em equações de estado com a matriz A na forma diagonal.
�l o
�l

J. A. M. Felippe de Souza 8 – Equações de Estado
26
8.4 – Transformação Função Transferência para Equações de Estado Não há uma regra única para se transformar sistemas descritos pela sua equação diferencial ordinária (EDO) ou, equivalentemente, pela sua função de transferência, em equações de estado. Vamos mostrar aqui o mesmo sistema, de terceira ordem, descrito pela equação diferencial �w + 12� += 20� = 80� e portanto com função de transferência dada por x�+� = 80+�+ + 2��+ + 10�
e vamos achar três formulações diferentes deste sistema em equações de estado.
Exemplo 8.16:
Considere o sistema descrito pela equação diferencial ordinária (EDO) �w + 12� += 20� = 80� Facilmente podemos achar a função de transferência do sistema G(s) = Y(s)/U(s)
x�+� = 80+L + 12+� + 20+ = D�+�E�+�
Definindo as variáveis de estado: �� = � �� = �� �� = � ⇒ �� = �L �L = �= �L = −20��−12�L + 80�
� = �� ⇒
x = i0 1 00 0 10 −20 −12j x + i 0080j u
� = �1 0 0!� Observe que a matriz A está na forma companheira.
A B
C
J. A. M. Felippe de Souza 8 – Equações de Estado
27
Exemplo 8.17: Vamos considerar o mesmo sistema do exemplo anterior. Entretanto aqui vamos rees-crever a função de transferência G(s) da seguinte forma: x�+� = 5+ ∙ 4�+ + 2� ∙ 4�+ + 10� = D�+�E�+�
Logo, definindo as variáveis de estado da seguinte forma: J��+� = 5E�+�+
J��+� = 20E�+�+�+ + 2�
JL�+� = x�+�. E�|� = D�+� = 80E�+�+�+ + 2��+ + 10� temos que
⇒ FGHGI +J1�+� = 5E�+�
�+ + 2� J2�+� = 4. 5E�+�+ = 4. J1�+�
�+ + 10� J3�+� = 4. 20 E�+�+�+ + 2� = 4. J2�+�
⇒ } �1 = 5��2 = 4�1 − 2�2
�3 = 4�2 − 10�3
que nos dá uma outra formulação em equações de estado deste sistema, diferente do exemplo anterior. Escrevendo na forma matricial temos � = i0 0 04 −2 00 4 −10j � + i500j
� = �0 0 1!�
J��+�E�+�
J��+�E�+�
JL�+�E�+�
⇒

J. A. M. Felippe de Souza 8 – Equações de Estado
28
Exemplo 8.18: Vamos considerar novamente o mesmo sistema dos 2 exemplos anteriores. Entretanto aqui vamos reescrever a função de transferência G(s) da seguinte forma: Expandindo em frações parciais e definindo as variáveis de estado J��+�, J��+� e JL�+� da forma indicada abaixo, x�+� = 4+ + −5�+ + 2� + 1�+ + 10� = D�+�E�+�
temos que
J��+� = 4E�+�+
J��+� = −5E�+��+ + 2�
JL�+� = E�+��+ + 10�
D�+� = (J��+�E�+� + J��+�E�+� + JL�+�E�+� ) E�+�
+J��+� = 4E�+�
+J��+� = −2J��+� − 5E�+�
+JL�+� = −10JL�+� + E�+� D�+� = J��+� + J��+� + JL�+�
logo, as equações de estado ficam: �� = 4� �� = −2�� − 5� �L = −10�L + � � = �� + �� + �L
� = i0 0 00 −2 00 0 −10j � + i 4−51 j �
� = �1 1 1!�
Portanto obtemos uma terceira representação em equações de estado para o mesmo sistema, diferente das anteriores. Note que nesta representação a matriz A está na forma diagonal e os polos do sistema (+ = 0, + = −2 e + = −10) são os elementos da diagonal principal. Obviamente que isso ocorre pois: se a matriz é diagonal, então os elementos da sua diagonal principal são os próprios autovalores do sistema.
J��+�E�+� J��+�E�+� JL�+�E�+�
⇒
⇒
A B
C
J. A. M. Felippe de Souza 8 – Equações de Estado
29
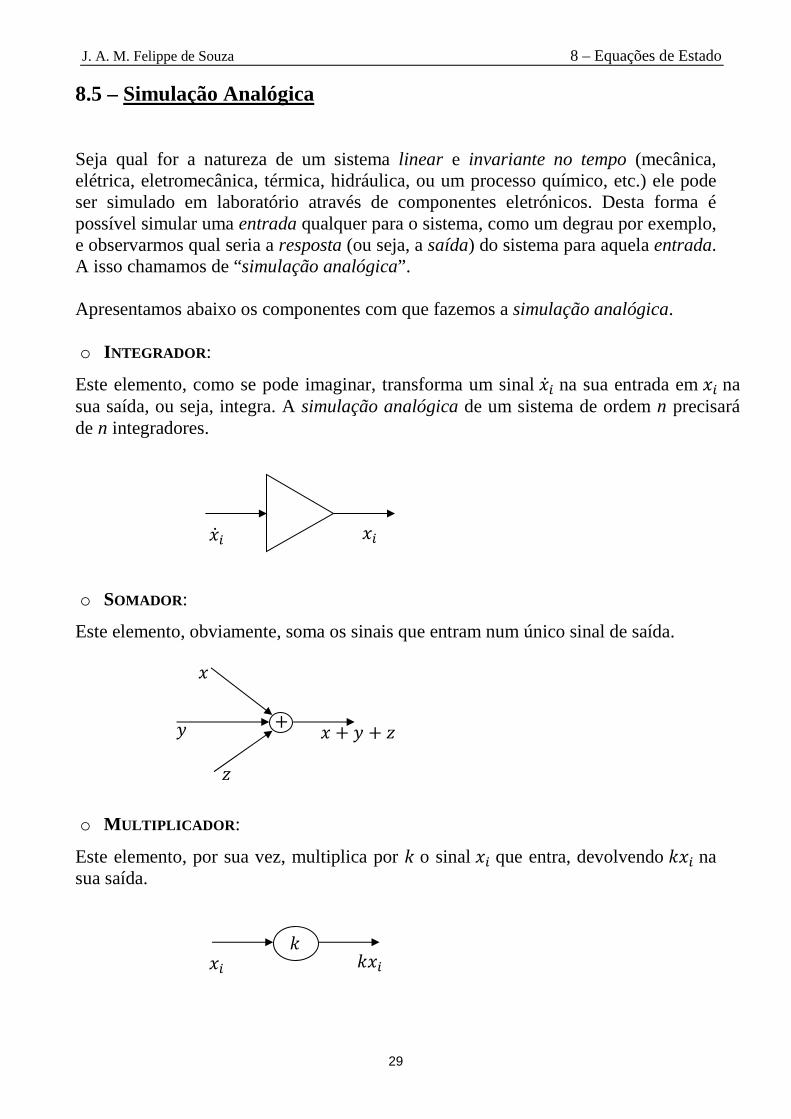
8.5 – Simulação Analógica Seja qual for a natureza de um sistema linear e invariante no tempo (mecânica, elétrica, eletromecânica, térmica, hidráulica, ou um processo químico, etc.) ele pode ser simulado em laboratório através de componentes eletrónicos. Desta forma é possível simular uma entrada qualquer para o sistema, como um degrau por exemplo, e observarmos qual seria a resposta (ou seja, a saída) do sistema para aquela entrada. A isso chamamos de “simulação analógica”. Apresentamos abaixo os componentes com que fazemos a simulação analógica. o INTEGRADOR :
Este elemento, como se pode imaginar, transforma um sinal �s na sua entrada em �s na sua saída, ou seja, integra. A simulação analógica de um sistema de ordem n precisará de n integradores. o SOMADOR :
Este elemento, obviamente, soma os sinais que entram num único sinal de saída. o MULTIPLICADOR :
Este elemento, por sua vez, multiplica por k o sinal �s que entra, devolvendo '�s na sua saída.
�s �s
� + � + ~ �
'�s �s
� ~
+
'
J. A. M. Felippe de Souza 8 – Equações de Estado
30
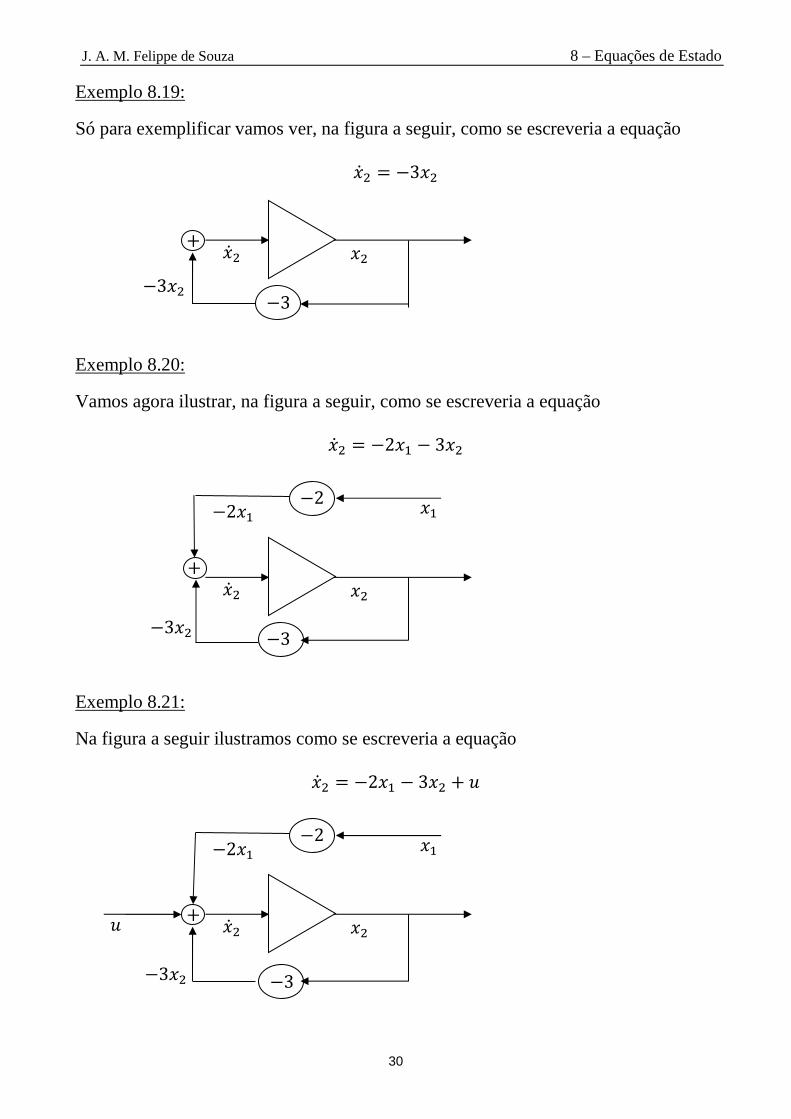
Exemplo 8.19:
Só para exemplificar vamos ver, na figura a seguir, como se escreveria a equação �� = −3�� Exemplo 8.20:
Vamos agora ilustrar, na figura a seguir, como se escreveria a equação �� = −2�� − 3�� Exemplo 8.21:
Na figura a seguir ilustramos como se escreveria a equação �� = −2�� − 3�� + �
�� �� + −2 −2�� ��
−3 −3�� �
�� �� + −2 −2�� ��
−3 −3��
�� �� + −3 −3��
J. A. M. Felippe de Souza 8 – Equações de Estado
31
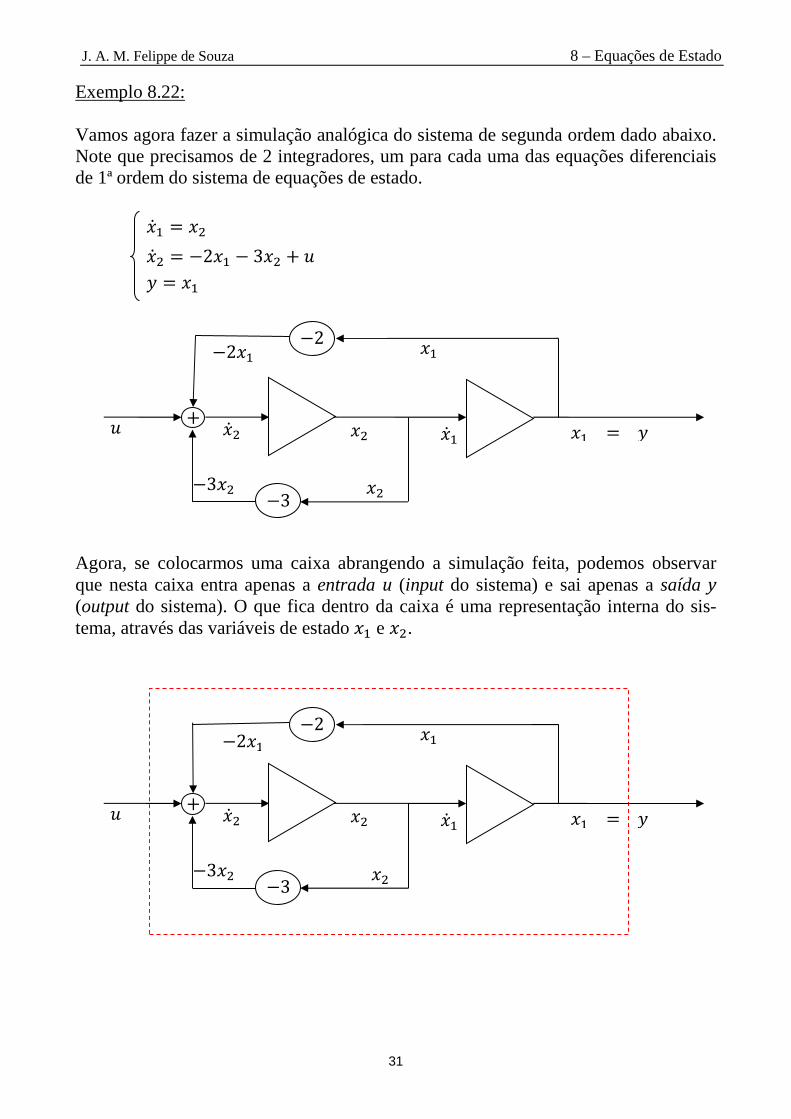
Exemplo 8.22: Vamos agora fazer a simulação analógica do sistema de segunda ordem dado abaixo. Note que precisamos de 2 integradores, um para cada uma das equações diferenciais de 1ª ordem do sistema de equações de estado. Agora, se colocarmos uma caixa abrangendo a simulação feita, podemos observar que nesta caixa entra apenas a entrada u (input do sistema) e sai apenas a saída y (output do sistema). O que fica dentro da caixa é uma representação interna do sis-tema, através das variáveis de estado �� e ��.
�� = �� �� = −2�� − 3�� + � � = ��
�� �� + −2 −2�� ��
−3 −3�� � �� �� = �
�� �� + −2 −2�� ��
−3 −3�� � �� �� = �
��
��
J. A. M. Felippe de Souza 8 – Equações de Estado
32
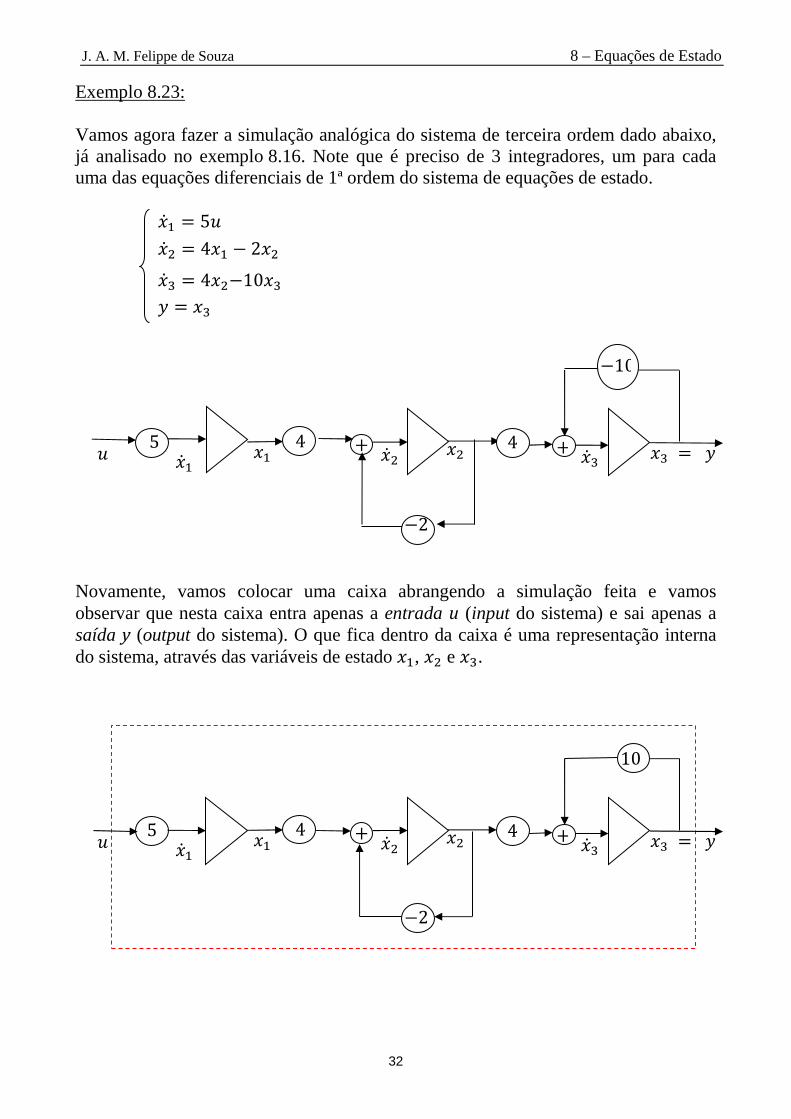
Exemplo 8.23: Vamos agora fazer a simulação analógica do sistema de terceira ordem dado abaixo, já analisado no exemplo 8.16. Note que é preciso de 3 integradores, um para cada uma das equações diferenciais de 1ª ordem do sistema de equações de estado. �� = 5� �� = 4�� − 2�� �L = 4��−10�L � = �L Novamente, vamos colocar uma caixa abrangendo a simulação feita e vamos observar que nesta caixa entra apenas a entrada u (input do sistema) e sai apenas a saída y (output do sistema). O que fica dentro da caixa é uma representação interna do sistema, através das variáveis de estado ��, �� e �L.
�� �� + �� � �� �L = � �L 5 +−2
4 −10
4
�� �� + �� � �� �L = � �L 5 +−2
4 10
4
J. A. M. Felippe de Souza 8 – Equações de Estado
33
Exemplo 8.24:
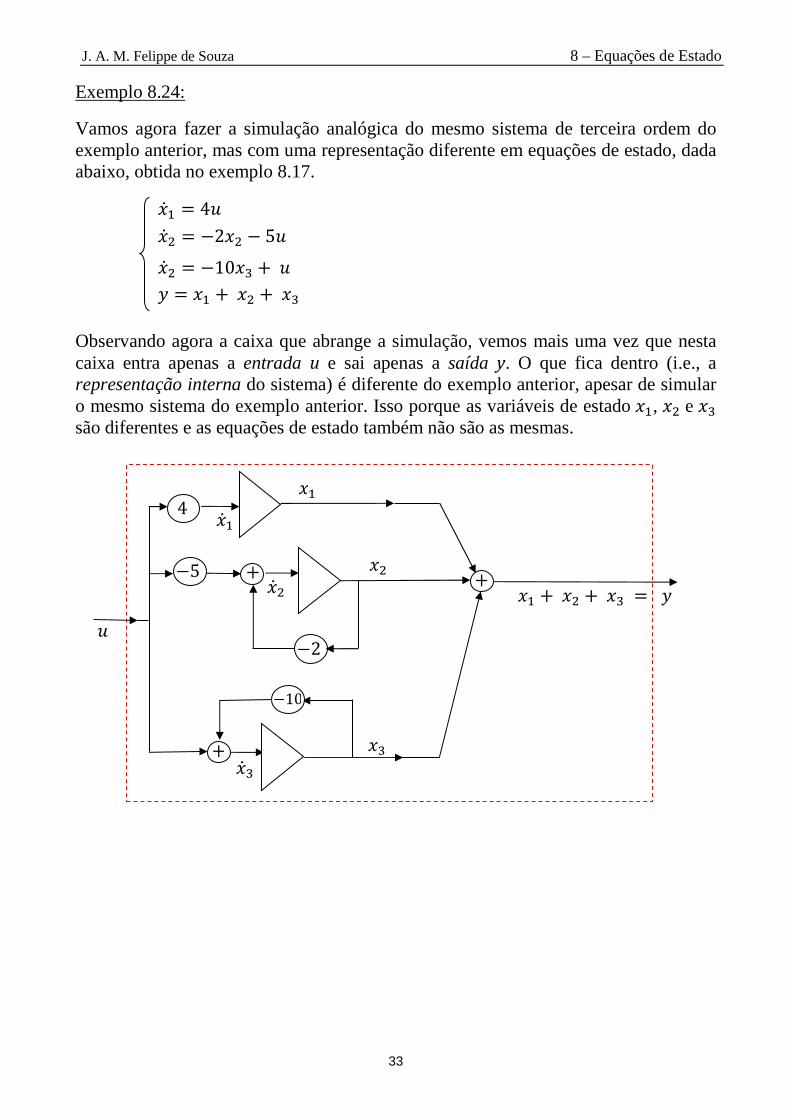
Vamos agora fazer a simulação analógica do mesmo sistema de terceira ordem do exemplo anterior, mas com uma representação diferente em equações de estado, dada abaixo, obtida no exemplo 8.17. �� = 4� �� = −2�� − 5� �� = −10�L + � � = �� + �� + �L Observando agora a caixa que abrange a simulação, vemos mais uma vez que nesta caixa entra apenas a entrada u e sai apenas a saída y. O que fica dentro (i.e., a representação interna do sistema) é diferente do exemplo anterior, apesar de simular o mesmo sistema do exemplo anterior. Isso porque as variáveis de estado ��, �� e �L são diferentes e as equações de estado também não são as mesmas.
�� �� ��
�
�� �� + �� + �L = �
�L
4
+
−2 −10
−5
�L
+ +

J. A. M. Felippe de Souza 8 – Equações de Estado
34
8.6 – Conversão de Equações de Estado para Função de Transferência A representação de um sistema em equações de estado que vimos aqui [na eq. (8.1)], � = �� + � � = �� + �� não é única. Na realidade, como já vimos na secção 8.3, definindo-se a nova variável de estado �̅ como, �̅ = f� para alguma matriz inversível P, então � = �̅� + g� � = �̅� + �h� onde [eq. (8.4)]: �̅ = f�fB� g = f �̅ = �fB� �h = �
é uma outra representação do mesmo sistema em equações de estado. Em particular, se A for diagonalizável e escolhermos f = rB� onde M é a matriz mudança de base r = �1� 1� ⋯ 1�! 1s = /�%*-1"�%*0 /++*�,/#* �*$ * /�%*1/2*0 cs , , = 1,2, … , então �̅ ficará na forma diagonal, com os seus autovalores c�, c�, ⋯ , c�, sendo os elementos da diagonal principal. Por outro lado a representação de um sistema pela sua função de transferência é única. Por exemplo, a função de transferência

J. A. M. Felippe de Souza 8 – Equações de Estado
35
D�+�E�+� �no caso de uma entrada u�t� e uma saída y(t)�
é única (a menos, claro, de uma multiplicação por uma constante nos coeficientes do numerador e do denominador). Observação:
As funções de transferência D�+�E�+� = 4�+ + 1�2+� + 11+ + 15
e D�+�E�+� = 2�+ + 1�+� + 112 + + 152
são a mesma. Nitidamente elas diferem apenas de uma multiplicação por uma cons-tante em ambos o numerador e o denominador. Esta função de transferência é a única deste sistema que tem polos �� = −3 e �� = −1,5 e um zero ~� = − 1. Para converter a representação de um sistema [que tem entrada u(t) e saída y(t)] de equações de estado � = �� + � , ��0� = �� � = �� + �� para função de transferência D�+�E�+�
a fórmula é dada por, D�+�E�+� = ��+] − ��B� + �
Este resultado será mostrado a seguir para um caso mais geral.
S u y
eq. (7.6)
eq. (7.7)
J. A. M. Felippe de Souza 8 – Equações de Estado
36
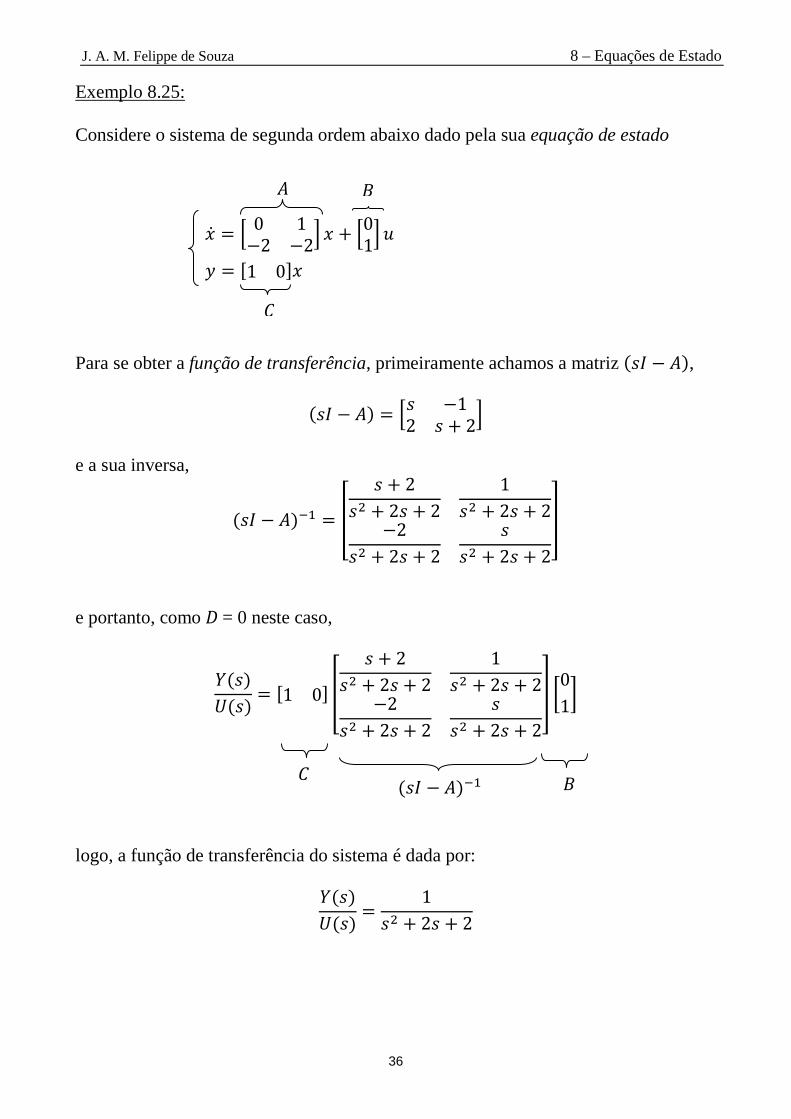
Exemplo 8.25: Considere o sistema de segunda ordem abaixo dado pela sua equação de estado � = 8 0 1−2 −2< � + 801< � � = �1 0!�
Para se obter a função de transferência, primeiramente achamos a matriz �+] − ��, �+] − �� = 8+ −12 + + 2< e a sua inversa,
�+] − ��B� = � + + 2+� + 2+ + 2 1+� + 2+ + 2−2+� + 2+ + 2 ++� + 2+ + 2�
e portanto, como D = 0 neste caso,
D�+�E�+� = �1 0! � + + 2+� + 2+ + 2 1+� + 2+ + 2−2+� + 2+ + 2 ++� + 2+ + 2� (01) logo, a função de transferência do sistema é dada por: D�+�E�+� = 1+� + 2+ + 2
C �+] − ��B� B
A B
C

J. A. M. Felippe de Souza 8 – Equações de Estado
37
Exemplo 8.26: Considere o sistema de segunda ordem abaixo dado pela sua equação de estado � = 8 0 1−4 −5< � + 801< � = �2 1!�
Novamente, para se obter a função de transferência, primeiramente achamos a matriz �+] − ��, �+] − �� = 8+ −14 + + 5< e a sua inversa,
�+] − ��B� = � + + 5+� + 5+ + 4 1+� + 5+ + 4−4+� + 5+ + 4 ++� + 5+ + 4�
logo, como D = 0, a função de transferência fica D�+�E�+� = �2 1! � + + 5+� + 5+ + 4 1+� + 5+ + 4−4+� + 5+ + 4 ++� + 5+ + 4� (01) e portanto, a função de transferência do sistema é dada por: D�+�E�+� = + + 2+� + 5+ + 4
A B
C
C �+] − ��B� B

J. A. M. Felippe de Souza 8 – Equações de Estado
38
Exemplo 8.27:
Considere agora o sistema de terceira ordem abaixo, já visto no exemplo 8.15, dado pela sua equação de estado � = i0 1 00 0 10 −20 −12j � + i 0080j �
� = �1 0 0!� Mais uma vez, começamos calculando a matriz �+] − ��, �+] − �� = i+ −1 00 + −10 20 + + 12j e a sua inversa
�+] − ��B� =NOOOOOP+� + 12+ + 20��+� + + 12��+� 1��+�0 +�+ + 12���+� +��+�0 20+��+� +���+�QRR
RRRS
onde, ��+� = det�+] − �� = +L + 12+� + 20+ o polinómio característico do sistema. Agora, como D = 0, D�+�E�+� = �1 0 0!�+] − ��B� i 0080j e portanto, a função de transferência do sistema é dada por: D�+�E�+� = 80+L + 12+� + 20+
Conforme já tínhamos visto no exemplo 8.15.
B C
J. A. M. Felippe de Souza 8 – Equações de Estado
39
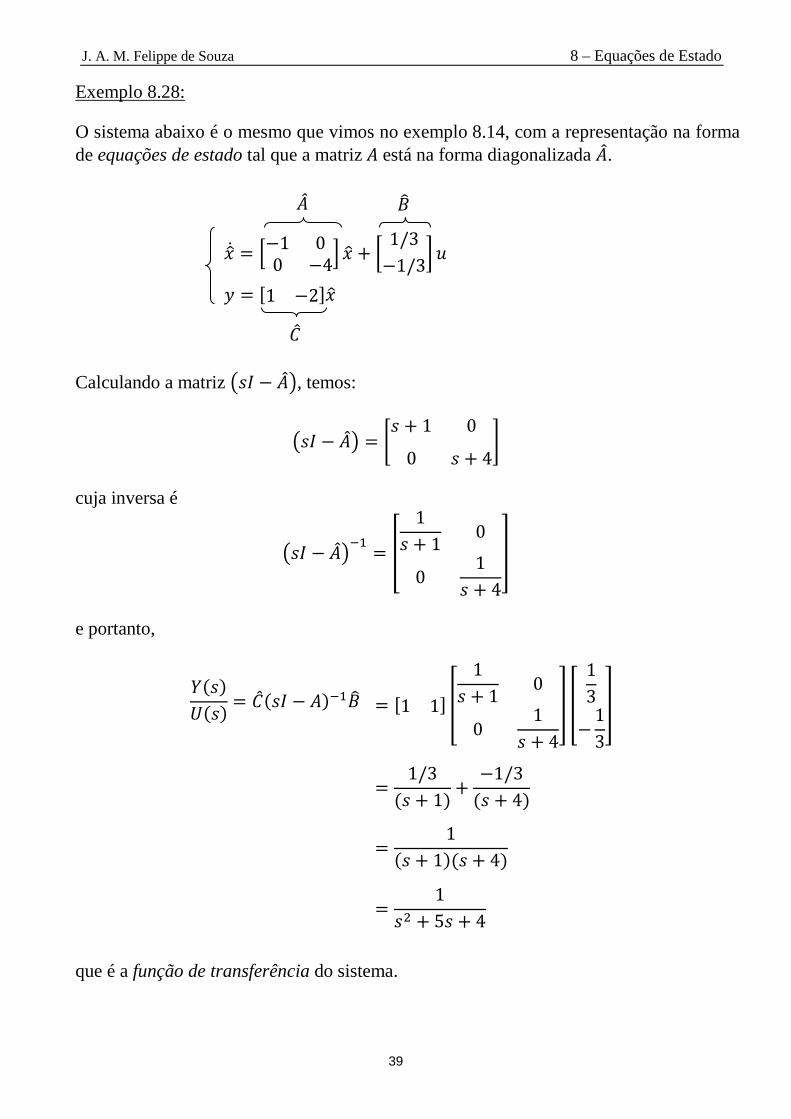
Exemplo 8.28: O sistema abaixo é o mesmo que vimos no exemplo 8.14, com a representação na forma de equações de estado tal que a matriz A está na forma diagonalizada �l. �q = 8−1 00 −4< �q + ( 1/3−1/3) �
� = �1 −2!�q Calculando a matriz �+] − �l�, temos: �+] − �l� = 4+ + 1 00 + + 45 cuja inversa é
�+] − �l�B� = � 1+ + 1 00 1+ + 4�
e portanto, D�+�E�+� = �l�+] − ��B� o = �1 1! � 1+ + 1 0
0 1+ + 4� � 13− 13�
= 1/3�+ + 1� + −1/3�+ + 4�
= 1�+ + 1��+ + 4�
= 1+� + 5+ + 4
que é a função de transferência do sistema.
�l o
�l
J. A. M. Felippe de Souza 8 – Equações de Estado
40
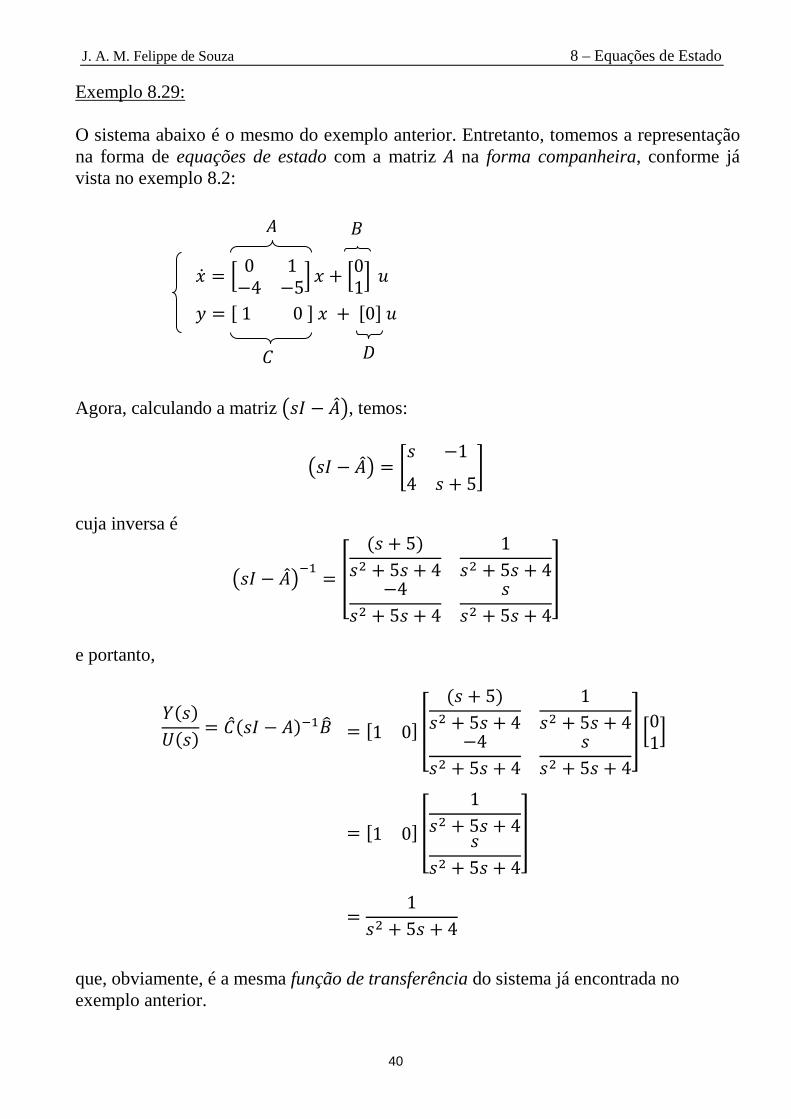
Exemplo 8.29: O sistema abaixo é o mesmo do exemplo anterior. Entretanto, tomemos a representação na forma de equações de estado com a matriz A na forma companheira, conforme já vista no exemplo 8.2: � = 8 0 1−4 −5< � + 801< � � = � 1 0 ! � + �0! �
Agora, calculando a matriz �+] − �l�, temos: �+] − �l� = 4+ −14 + + 55 cuja inversa é
�+] − �l�B� = � �+ + 5�+� + 5+ + 4 1+� + 5+ + 4−4+� + 5+ + 4 ++� + 5+ + 4�
e portanto, D�+�E�+� = �l�+] − ��B� o = �1 0! � �+ + 5�+� + 5+ + 4 1+� + 5+ + 4−4+� + 5+ + 4 ++� + 5+ + 4� 801<
= �1 0! � 1+� + 5+ + 4++� + 5+ + 4�
= 1+� + 5+ + 4
que, obviamente, é a mesma função de transferência do sistema já encontrada no exemplo anterior.
C D
A B
J. A. M. Felippe de Souza 8 – Equações de Estado
41
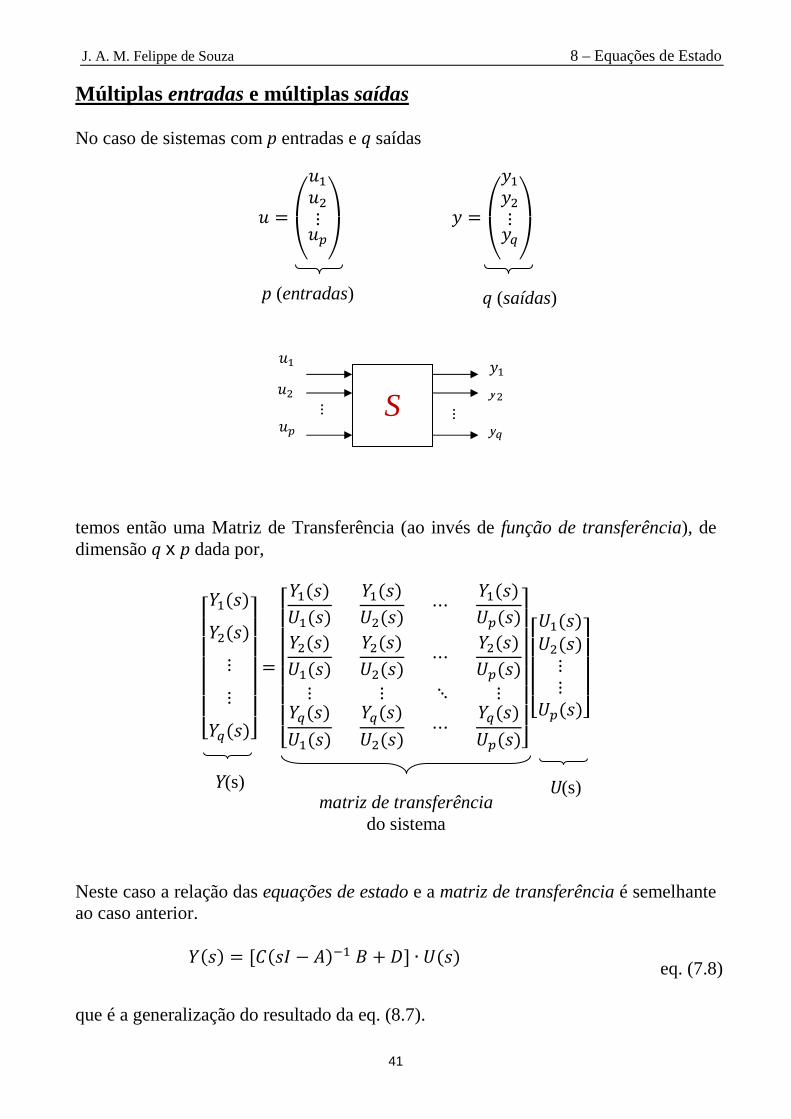
Múltiplas entradas e múltiplas saídas No caso de sistemas com p entradas e q saídas
� = ������⋮���
� � = ������⋮���
�
temos então uma Matriz de Transferência (ao invés de função de transferência), de dimensão q x p dada por,
NOOOOOPD��+�D��+�⋮⋮D��+�QR
RRRRS =
NOOOOOOPD��+�E��+� D��+�E��+� ⋯ D��+�E��+�D��+�E��+� D��+�E��+� ⋯ D��+�E��+�⋮ ⋮ ⋱ ⋮D��+�E��+� D��+�E��+� ⋯ D��+�E��+�QRR
RRRRS
NOOOPE��+�E��+�⋮⋮E��+�QRR
RS
Neste caso a relação das equações de estado e a matriz de transferência é semelhante ao caso anterior. D�+� = ���+] − ��B� + �! ∙ E�+� que é a generalização do resultado da eq. (8.7).
⋮ ⋮ S
�� ��
�� ��
��
��
p (entradas) q (saídas)
Y(s) matriz de transferência
do sistema
U(s)
eq. (7.8)

J. A. M. Felippe de Souza 8 – Equações de Estado
42
Para verificarmos o resultado eq. (8.7) acima considere a Transformada de Laplace das equações de estado da eq. (8.6) quando as condições iniciais são nulas (i.e., �� = 0): W+J�+� = �J�+� + E�+�D�+� = �J�+� + �E�+�
ou seja, W�+] − ��J�+� = E�+�D�+� = �J�+� + �E�+�
e portanto, WJ�+� = �+] − ��B� E�+�D�+� = �J�+� + �E�+�
que é equivalente à eq. (8.8). Portanto um sistema pode ter mais de uma representação na forma de equações de estado, mas apenas uma representação na forma de função de transferência. As relações da eq. (8.7), que repetimos aqui: D�+�E�+� = ��+] − ��B� + �
e da eq. (8.8), que também repetimos aqui: D�+� = ��+] − ��B� E�+� + �E�+� mesmo que aplicadas a representações diferentes do mesmo sistema em equações de estado, conduzem sempre à mesma função de transferência do sistema, pois ela é única. Exemplo 8.30: O sistema abaixo…

J. A. M. Felippe de Souza 8 – Equações de Estado
43
������L��� = �0 10 0 0 01 00 00 0 0 1−1 0� ������L���
8����< = 81 0 0 00 0 1 0< ������L���
Exemplo 8.31: O sistema abaixo… (����) = (−0,5 00 −0,25) 8����< 8����< = 80,5 00 1< 8����<
� (t) A x(t)
y(t) C x(t)
� (t) A x(t)
y(t) C x(t)