5. logique s”quentielle synchroneguizol/polys/synchro.pdf · 2003-01-06 · bascules et devient...
TRANSCRIPT

Licence dÕInformatiqueMARSEILLE-LUMINY
5. Logique s�quentielle synchrone
5.1 - Les circuits de logique s�quentielle synchrone.5.2 - Simplification de la matrice des phases.5.3 - Attribution des variables auxiliaires.5.4 - D�composition fonctionnelle et partitions5.5 - D�composition en l'absence de partitions
5.1. Les circuits de logique s�quentielle synchrone.
5.1.1. Introduction
La diff�rence fondamentale qui existe entre la logique asynchrone et la logiquesynchrone est la pr�sence d'un signal qui va permettre de d�terminer le momentou le changement d'�tat des entr�es doit �tre pris en compte.
Rappelons pour �tre parfaitement clair que dans le cas d'un circuit de logiqueasynchrone, le changement d'�tat d'une entr�e �tait pris en compte d�s l'instanto� il se produisait, ce qui nous interdisait de consid�rer comme possible unchangement d'�tat simultan� de plusieurs entr�es. Dans le cas de la logiquesynchrone, la prise en compte du changement d'�tat s'effectue � l'apparitiond'un signal que nous appellerons Horloge, ce qui nous permet de consid�rercomme logiquement possible la variation simultan�e de plusieurs signauxd'entr�e, en effet bien que leur variation physique se pr�sente � des instantsdiff�rents dans le temps, leur prise en compte effective se produit � l'apparitiondu signal d'�chantillonnage.
A
Horloge
B
Dt
T1 T2 T3
Figure 5.1.1 : �chantillonnage des signaux

Page 5.2 Jacques Guizol & Christian Aperghis
Ce ph�nom�ne dÕ�chantillonnage du signal est parfaitement explicit� par lediagramme de la figure 5.1.1. Au temps T1 le signal A change d'�tat, au tempsT2 le signal B change � son tour d'�tat. Entre les temps T2 et T3 rien ne sepasse car le signal d'horloge est inactif, ce n'est qu'en T3 et pendant le temps T3+ Dt que les signaux seront logiquement pris en compte par le circuit. En fait,tout ce qui se passe avant T3 et apr�s T3 + Dt est ignor� par le syst�me.Globalement, un circuit de logique s�quentielle synchrone se pr�sente commeindiqu� en figure 5.1.2.
s1
sn
.....
C1 .....
Cm
y1
yp
....Circuit
combinatoire Bascules
Horloge
Figure 5.1.2 : Sch�ma g�n�ral dÕun circuit s�quentiel synchrone
Un circuit combinatoire permet de d�terminer, en fonction de l'�tat actuel et desentr�es, quelles seront les sorties et quel sera le code de l'�tat qui doit succ�der.
Les bascules permettent de s�parer les deux �tats, actuel (m�moris�) et suivant.Au moment ou se pr�sente le signal dÕhorloge, l'�tat suivant est recopi� dans lesbascules et devient de ce fait l'�tat actuel, le circuit combinatoire va donc, enfonction des entr�es et de ce nouvel �tat d�terminer de nouvelles sorties et unnouvel �tat suivant. Le cycle se reproduira chaque fois que se pr�sentera lesignal d'horloge.
Nous consid�rerons les bascules par l'interm�diaire desquelles se transmetl'�tat comme des syst�mes simples permettant la m�morisation d'un �l�mentd'information (figure 5.1.3).
Entr�e Sortie
Horloge
Bascule
Figure 5.1.3
L'information qui se pr�sente sur l'entr�eest ignor�e tant que le signal d'horloge estinactif. Lorsque le signal en question sepr�sentera, la bascule enregistrera l'infor-mation qui se trouve � l'entr�e et enr�percutera aussit�t l'�tat sur la sortie.Cette sortie demeurera inchang�e jusqu'�la prochaine �criture.
5.1.2. Repr�sentation sous forme de graphe.
Cette repr�sentation est assez proche de celle que nous avons d�j� pu voir dansle cas du circuit asynchrone. Ainsi que nous lÕavons d�j� not�, la diff�rencevient du fait que dans un circuit asynchrone il nous �tait interdit de modifiersimultan�ment plusieurs variables d'entr�e. En particulier, sur le graphe desphases, pour deux ar�tes cons�cutives, la combinaison des variables dÕentr�e nediff�rait que par la compl�mentation d'au plus une variable (figure 5.1.4).

Logique S�quentielle Synchrone Page5.3
x1x2..00 ..xn
2
1
x1x2..00 ..xn
x1x2..10 ..xn
Figure 5.1.4 : Transition dÕ�tat en logique asynchrone
Cette contrainte ne sÕapplique plus dans le cas du circuit synchrone, car, ainsique nous l'avons d�j� vu, la pr�sence de l'horloge nous permet de passer den'importe quelle combinaison des variables d'entr�e vers n'importe quelle autre(figure 5.1.5).
1
3
Ci Cj
Ck
2
Figure 5.1.5 : De chaque �tat, on peut atteindre tous les autres
Il en r�sulte que, si on consid�re un circuit � n entr�es, quelle que soit laconfiguration qui a permis dÕacc�der � un sommet du graphe, il est n�cessairedÕ�tudier les 2n configurations qui partent de ce sommet.
5.1.3. Machine de Moore, Machine de Mealy.
Nous avons vu, jusqu'� pr�sent, que le fonctionnement d'un circuit s�quentielpeut �tre parfaitement d�fini par un graphe. Il y a n�anmoins deux mani�res derepr�senter le graphe en question, chacune �tant associ�e � une famille demachine s�quentielle.
La premi�re famille, les machines de Moore, lient la configuration de sortie �l'�tat dans lequel se trouve la machine � un instant donn�. Le graphe de cettemachine est repr�sent� en figure 5.1.6. Dans ce type de machine, la sortie estm�moris�e et sera soit un �tat, soit un �v�nement contr�l� par le signaldÕhorloge.
1
2
3
E1
E2 E4
E3
S1
S2
S3
E5
Figure 5.1.6 : Graphe dÕune machine de Moore

Page 5.4 Jacques Guizol & Christian Aperghis
LÕinterpr�tation du fonctionnement dÕune telle machine est :
La machine �tant dans un �tat 1 pour lequel la configuration desortie est S1, lorsque la configuration d'entr�e devient E3 (resp. E4)alors la machine passe dans l'�tat 2 (resp. 3) et la sortie prend lavaleur S2 (resp. S3).
Le sch�ma g�n�ral de ce type de machine est celui repr�sent� en figure 5.1.7.On dira que cette machine respecte les sorties.
E SC2C1 B
5.1.7 : Sch�ma g�n�ral dÕune machine de Moore
Concr�tement, cela signifie que la configuration de sortie est directement li�e �l'�tat de la machine et � cet �tat exclusivement. A noter en outre que laconfiguration de sortie nÕappara�t quÕau moment o� l'�tat consid�r� se pr�senteeffectivement, c'est � dire un temps apr�s la transition qui l'a fait na�tre.
La machine de Mealy ne tient pas compte des �tats en tant que tels, mais biendavantage de ce qui se passe lors de la transition entre deux �tats successifs.
Ainsi dans l'exemple pr�c�dent (figure 5.1.6), on constate que la machine �tantdans l'�tat 1 d�s quÕappara�t la configuration dÕentr�e E3 on peut affirmer sansse tromper que :
¥ La machine va passer dans lÕ�tat 2¥ La sortie va prendre la configuration S2
Il est donc possible de lier le positionnement de la sortie � lÕar�te au lieu de lalier au sommet (figure 5.1.8). La cons�quence est que la sortie ne peut �trequÕun �v�nement.
1
2
3
E1/S1
E2/S1
E3/S2
E4/S3
E5/S2
Figure 5.1.8 : Graphe dÕune machine de Mealy
La figure 5.1.9 montre le sch�ma g�n�ral dÕune machine de Mealy. On parlerapour cette machine de Ônon-respect des sortiesÕ.
E SC2C1 B
Figure 5.1.9 : Sch�ma g�n�ral dÕune machine de Mealy

Logique S�quentielle Synchrone Page5.5
LÕinterpr�tation du fonctionnement dÕune telle machine est :
La machine �tant dans un �tat 1, lorsque la configuration d'entr�edevient E4 (resp. E3) alors la machine transite vers l'�tat 2 (resp. 3)et la sortie se positionne � S2 (resp. S3).
Ainsi, la sortie d'une telle machine r�pond imm�diatement aux sollicitations del'entr�e, elle d�pend � la fois de l'�tat dans lequel se trouve la machine et de laconfiguration qui appara�t sur l'entr�e
5.1.3. Un exemple de circuit s�quentiel synchrone.
Nous allons �tudier un circuit permettant de reconna�tre une s�quence dÕentr�e.
Dans le cas � traiter, cette s�quence sera compos�e de quatre 1 successifs.
Temps : 1 2 3 4 5 6 7 8 9 10 11 12Entr�e : 0 1 1 0 1 1 1 1 1 1 0 1Sortie : 0 0 0 0 0 0 0 1 1 1 0 0
Ainsi que nous lÕavons repr�sent� ci dessus, la sortie passe � 1 au temps 8 cardes 1 sont apparus aux temps 5, 6, 7 et 8. Le fonctionnement de cette machineest enti�rement d�crit par le graphe de la figure 5.1.10, repr�sentatif dÕunemachine de Mealy.
1/10/0 1/0
1/0
0/0
1/00/0
0/0
1/0
1/0
0/0
1/0
0/01/0
0/0
0/0
0
73
5
1
6
4
2
Figure 5.1.10 : Graphe de lÕanalyseur de s�quence Ô1111Õ
La matrice des phases associ�e au graphe est d�crite en figure 5.1.11.
E = 0 E = 1Etat
Pr�sentEtat Suivant Sortie
E = 0 E = 1
01234567
02460246
13571357
00000000
00000001
Figure 5.1.11 : Matrice des phases associ�e

Page 5.6 Jacques Guizol & Christian Aperghis
La construction de la matrice des phases suit les m�mes r�gles que celles quiont �t� d�finies pour les syst�mes asynchrones, exception faite que dans le casdÕun syst�me synchrone la notion dÕ�tat instable a disparu.
5.2. Simplification de la matrice des phases.
5.2.1. Equivalence simple
Deux �tats sont non �quivalents si, pour une m�me entr�e :
¥ le passage � l'�tat suivant produit des sorties contradictoires ;¥ les �tats suivants sont diff�rents et non �quivalents.
Deux �tats sont �quivalents si pour chaque entr�e :
¥ le passage � l'�tat suivant produit des sorties identiques ;¥ les transitions interdites sont les m�mes ;¥ on ne peut pas montrer qu'ils sont non �quivalents.
En pratique : ¦ si les lignes associ�es aux deux �tats de la matrice des phasessont identiques, alors les deux �tats sont �quivalents.
¦ si les sorties associ�es aux deux �tats sont identiques mais queles �tats suivants diff�rent, alors les �tats sont �quivalents sipour chaque entr�e les �tats suivants qui sont diff�rents sonteux m�mes �quivalents.
Lorsque deux �tats ont �t� d�clar�s �quivalents, la ligne correspondante de lÕunde ces �tats sera supprim� de la matrice des phases et toute occurrence de cet�tat sera remplac�e par son �quivalent.
Soit la matrice des phases de la figure 5.2.1. On voit que les lignes 2 et 6 sontidentiques, m�me successeur et m�me sortie. Les �tats correspondants sontdonc �quivalents. De la m�me mani�re sont �quivalents les �tats1, 4 et 8.
E = 0 E = 1
EtatPr�sent
Etat Suivant Sortie
E = 0 E = 1
12345678
24523452
56758615
00101010
11010101
Figure 5.2.1 : Matrice des phases dÕorigine
Apr�s simplification, nous obtenons lamatrice des phases de la figure 5.2.2.
E = 0 E = 1Etat
Pr�sent
Etat Suivant Sortie
E = 0 E = 1
12357
21535
52711
00111
11000
Figure 5.2.2 : Matrice des phases simplifi�e
5.2.2. Equivalence conditionnelle.
LÕ�quivalence conditionnelle se d�finit de la m�me mani�re que pour lescircuits asynchrones. LÕ�quivalence conditionnelle peut �tre simple comme dansla figure 5.2.3. Les �tats 1 et 2 sont �quivalents si les �tats 3 et 4 le sont euxaussi ce qui est le cas.
La matrice des phases peut donc se simplifier en supprimant un des deux �tats3 ou 4 et un des deux �tats 1 ou 2.

Logique S�quentielle Synchrone Page5.7
E = 0 E = 1Etat
Pr�sentEtat Suivant Sortie
E = 0 E = 1
1234
5511
3466
1100
1111
Figure 5.2.3 : Exemple dÕ�quivalence conditionnelle simple.
LÕ�quivalence conditionnelle peut �tre plus complexe � mettre en �vidence, ainsisur le diagramme des phases de la figure 5.2.4 on voit que Les �tats 1 et 3 sont�quivalents si les �tats 4 et 5 le sont aussi, mais pour que les �tats 4 et 5 soient�quivalents il faut que les �tats 1 et 3 soient �quivalents.
E = 0 E = 1Etat
Pr�sentEtat Suivant Sortie
E = 0 E = 1
12345
46513
79755
10111
01000
Figure 5.2.4 : Exemple dÕ�quivalences crois�es
La relation dÕ�quivalence �tant transitive on peut en conclure que les �tats 1 et3 sont �quivalents de m�me que les �tats 4 et 5. Ce qui permet de simplifier lamatrice des phases comme indiqu� en figure 5.2.5.
Il est donc important de disposer dÕune m�thode permettant la d�termination detoutes les �quivalences.
E = 0 E = 1Etat
Pr�sentEtat Suivant Sortie
E = 0 E = 1
124
461
794
101
010
Figure 5.2.5 : Matrice de la figure 5.2.4 simplifi�e
La m�thode qui a �t� d�crite dans le cas des circuits asynchrones sÕappliquesans modification dans le cas des circuits synchrones :
¥ Regroupement de toutes les lignes correspondant aux �tats ayant lesm�mes configurations de sortie (�tats potentiellement �quivalents).
¥ �tablissement dÕune table � deux entr�es, comportant une ligne pourchaque �quivalence possible et une colonne pour chaque �quivalencepossible.
¥ Marquage r�cursif de tous les �tats manifestement non �quivalents.
A la fin de lÕop�ration, tous les �tats non marqu�s sont �quivalents.

Page 5.8 Jacques Guizol & Christian Aperghis
5.2.3. Simplification dÕune matrice des phasesincompl�tement sp�cifi�e.
Une matrice des phases incompl�tement sp�cifi�e est une matrice des phasesdans laquelle figurent des signes dÕindiff�rence. Nous allons retrouver ici leprobl�me des pseudo-�quivalences d�j� vu � propos des circuits asynchrones.
Deux �tats sont dits pseudo-�quivalents si la ligne correspondant � lÕun dÕentreeux comportant un ou plusieurs signes dÕindiff�rence, elle peut �tre rendueidentique � la ligne correspondant � un autre �tat en rempla�ant les signesdÕindiff�rence par les symboles convenables.
En pratique : ¦ si les lignes associ�es aux deux �tats de la matrice des phasessont unifiables, alors les deux �tats sont pseudo-�quivalents.
¦ si les sorties associ�es aux deux �tats sont unifiables mais queles �tats suivants diff�rent, alors les �tats sont pseudo-�quivalents si pour chaque entr�e, les �tats suivants qui sontdiff�rents sont eux m�me pseudo-�quivalents.
Contrairement � la relation dÕ�quivalence, la pseudo-�quivalence nÕest pastransitive.
Par exemple dans la matrice des phases de la figure 5.2.6, les lignes 1 et 2 sontpseudo-�quivalentes, les lignes 2 et 3 sont elles aussi pseudo-�quivalentes alorsque les lignes 1 et 3 ne sont pas pseudo-�quivalentes.
E = 11 E = 10Etat
Pr�sentEtat Suivant Sortie
E = 00 E = 01 E = 11 E = 10E = 00 E = 01
123
444
5-5
-66
777
000
000
111
1-0
Figure 5.2.6 : Matrice comportant 2 pseudo-�quivalences exclusives.
Ce qui revient � dire que lÕon peut proc�der � la simplification 1 - 2 (figure5.2.7a) ou � la simplification 2 - 3 (figure 5.2.7b) mais pas aux deux � la fois.
Cette propri�t� de non-transitivit� ne simplifie pas le probl�me. En effet, enfonction de lÕordre dans lequel seront appliqu�es les simplifications, le r�sultatpourra �tre plus ou moins complexe.
E = 11 E = 10Etat
Pr�sentEtat Suivant Sortie
E = 00 E = 01 E = 11 E = 10E = 00 E = 01
13
44
55
66
77
00
00
11
10
E = 11 E = 10Etat
Pr�sentEtat Suivant Sortie
E = 00 E = 01 E = 11 E = 10E = 00 E = 01
12
44
55
-6
77
00
00
11
10
Figure 5.2.7 a&b : Deux fa�ons de simplifier la matrice de la figure 5.2.6.
Logique S�quentielle Synchrone Page5.9
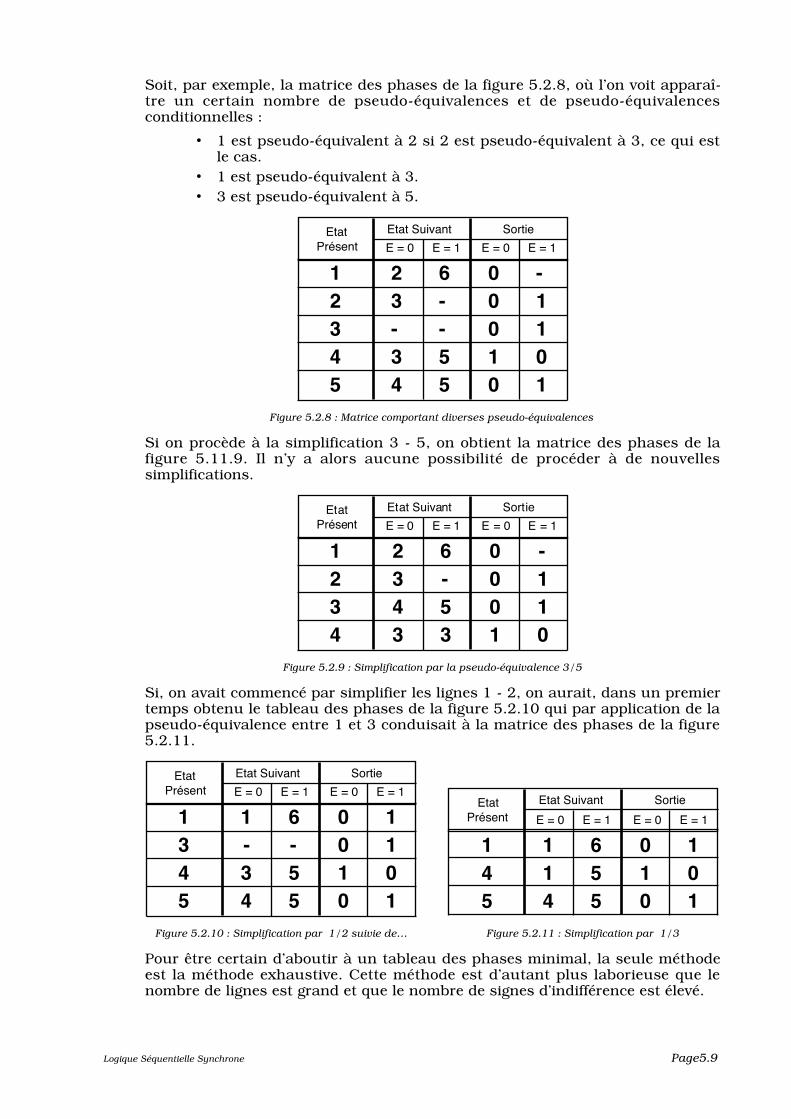
Soit, par exemple, la matrice des phases de la figure 5.2.8, o� lÕon voit appara�-tre un certain nombre de pseudo-�quivalences et de pseudo-�quivalencesconditionnelles :
¥ 1 est pseudo-�quivalent � 2 si 2 est pseudo-�quivalent � 3, ce qui estle cas.
¥ 1 est pseudo-�quivalent � 3.¥ 3 est pseudo-�quivalent � 5.
E = 0 E = 1Etat
Pr�sentEtat Suivant Sortie
E = 0 E = 1
12345
23-34
6--55
00010
-1101
Figure 5.2.8 : Matrice comportant diverses pseudo-�quivalences
Si on proc�de � la simplification 3 - 5, on obtient la matrice des phases de lafigure 5.11.9. Il nÕy a alors aucune possibilit� de proc�der � de nouvellessimplifications.
E = 0 E = 1Etat
Pr�sentEtat Suivant Sortie
E = 0 E = 1
1234
2343
6-53
0001
-110
Figure 5.2.9 : Simplification par la pseudo-�quivalence 3/5
Si, on avait commenc� par simplifier les lignes 1 - 2, on aurait, dans un premiertemps obtenu le tableau des phases de la figure 5.2.10 qui par application de lapseudo-�quivalence entre 1 et 3 conduisait � la matrice des phases de la figure5.2.11.
E = 0 E = 1Etat
Pr�sentEtat Suivant Sortie
E = 0 E = 1
1345
1-34
6-55
0010
1101
Figure 5.2.10 : Simplification par 1/2 suivie deÉ
E = 0 E = 1Etat
Pr�sentEtat Suivant Sortie
E = 0 E = 1
145
114
655
010
101
Figure 5.2.11 : Simplification par 1/3
Pour �tre certain dÕaboutir � un tableau des phases minimal, la seule m�thodeest la m�thode exhaustive. Cette m�thode est dÕautant plus laborieuse que lenombre de lignes est grand et que le nombre de signes dÕindiff�rence est �lev�.

Page 5.10 Jacques Guizol & Christian Aperghis
5.2.4 M�thode g�n�rale de d�termination de pseudo-�quivalences.
Soit la matrice des phases de la figure 5.2.12.
Cette matrice comportant un certain nombre de lignes et un grand nombre designes dÕindiff�rence, son �tude exhaustive demanderait un temps consid�rable.
E = 11 E = 10Etat
Pr�sentEtat Suivant Sortie
E = 00 E = 01 E = 11 E = 10E = 00 E = 01
123456789
1011
1--44-44-4-
442-----881
7-6-1101101010-
0-1001-11-0
-1-1111-11-
-11-0------
001----0-00
-511779799-1
Figure 5.2.12 : Matrice des phases � simplifier
Nous allons utiliser pour la simplifier la m�thode mise au point par Paull etUnger. Nous allons construire et remplir une table repr�sentative de toutes les�quivalences possibles (figure 5.2.13).
Ainsi, par exemple, dans la case se trouvant sur la ligne 7 et la colonne 8, onindiquera que la condition pour que ces deux �tats soient �quivalents est que :
¥ les �tats 7 et 9 soient �quivalents ;¥ les �tats 1 et 10 soient �quivalents.
Si deux �tats sont manifestement non �quivalents, (configurations de sortie nonunifiables) ou conditionn�s � lÕ�quivalence de deux �tats non �quivalents, ilsseront barr�s. Si aucune condition nÕest requise, la case sera gris�e.
23456789
1011
1 2 3 4 5 6 7 8 9 10
Dans cette case on
fera appara�tre les
conditions pour que
les �tats 7 et 8
soient �quivalents.
Figure 5.2.13 : Table de Paul et Unger
Logique S�quentielle Synchrone Page5.11
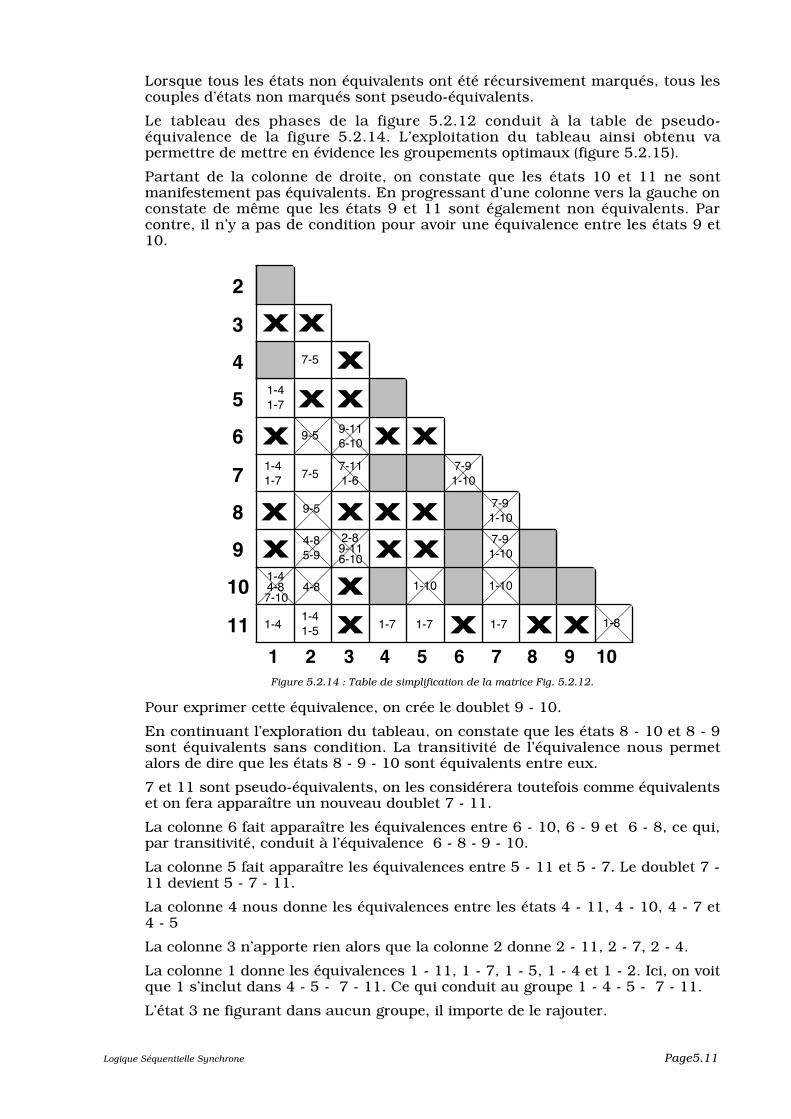
Lorsque tous les �tats non �quivalents ont �t� r�cursivement marqu�s, tous lescouples dÕ�tats non marqu�s sont pseudo-�quivalents.
Le tableau des phases de la figure 5.2.12 conduit � la table de pseudo-�quivalence de la figure 5.2.14. LÕexploitation du tableau ainsi obtenu vapermettre de mettre en �vidence les groupements optimaux (figure 5.2.15).
Partant de la colonne de droite, on constate que les �tats 10 et 11 ne sontmanifestement pas �quivalents. En progressant dÕune colonne vers la gauche onconstate de m�me que les �tats 9 et 11 sont �galement non �quivalents. Parcontre, il nÕy a pas de condition pour avoir une �quivalence entre les �tats 9 et10.
2
3
4
5
6
7
8
9
10
11
1 2 3 4 5 6 7 8 9 10
1-41-7
1-41-7
1-4
7-5
9-5
4-85-9
4-8
1-41-5
7-111-6
2-89-116-10
1-7
7-91-10
7-91-10
1-10
7-91-10
1-44-87-10
1-7 1-7
1-10
1-8
9-116-10
7-5
9-5
x xx
x xx x x
x x x xx xx
xx x x x
Figure 5.2.14 : Table de simplification de la matrice Fig. 5.2.12.
Pour exprimer cette �quivalence, on cr�e le doublet 9 - 10.
En continuant lÕexploration du tableau, on constate que les �tats 8 - 10 et 8 - 9sont �quivalents sans condition. La transitivit� de lÕ�quivalence nous permetalors de dire que les �tats 8 - 9 - 10 sont �quivalents entre eux.
7 et 11 sont pseudo-�quivalents, on les consid�rera toutefois comme �quivalentset on fera appara�tre un nouveau doublet 7 - 11.
La colonne 6 fait appara�tre les �quivalences entre 6 - 10, 6 - 9 et 6 - 8, ce qui,par transitivit�, conduit � lÕ�quivalence 6 - 8 - 9 - 10.
La colonne 5 fait appara�tre les �quivalences entre 5 - 11 et 5 - 7. Le doublet 7 -11 devient 5 - 7 - 11.
La colonne 4 nous donne les �quivalences entre les �tats 4 - 11, 4 - 10, 4 - 7 et4 - 5
La colonne 3 nÕapporte rien alors que la colonne 2 donne 2 - 11, 2 - 7, 2 - 4.
La colonne 1 donne les �quivalences 1 - 11, 1 - 7, 1 - 5, 1 - 4 et 1 - 2. Ici, on voitque 1 sÕinclut dans 4 - 5 - 7 - 11. Ce qui conduit au groupe 1 - 4 - 5 - 7 - 11.
LÕ�tat 3 ne figurant dans aucun groupe, il importe de le rajouter.

Page 5.12 Jacques Guizol & Christian Aperghis
A propos de la colonne 1, il aurait �t� possible de proc�der au regroupement 1 -2 - 4 mais, dans ces conditions, la configuration obtenue aurait �t� moinscompacte :
A ce stade, la proposition dÕ�quivalence que nous obtenons est la suivante :
6 - 8 - 9 - 10 / 1 - 4 - 5 - 7 - 11 / 4 - 10 / 2 - 4 / 2 - 7 / 2 - 11 / 1 - 2 / 3
10987654321
Ligne Regroupements
¯
9-10
8-9-10
8-9-10/7-11
6-8-9-10/7-11
6-8-9-10/5-7-11
6-8-9-10/4-5-7-11/4-10
6-8-9-10/4-5-7-11/4-10
6-8-9-10/4-5-7-11/4-10/2-4/2-7/2-11
6-8-9-10/1-4-5-7-11/4-10/2-4/2-7/2-11/1-2
Figure 5.2.15 : Table des regroupements obtenus � partir de la table de simplification.
Les �quivalences �tant maintenant mises en �vidence, il importe de proc�der �un choix coh�rent des termes qui conduiront au tableau final. Il fauts�lectionner le nombre minimal de termes de sorte que tous les �tatsapparaissent une fois et une seule.
Dans notre cas, un regroupement pourrait �tre : 6 - 8 - 9 - 10 / 1 - 4 - 5 - 7 - 11/ 2 / 3. En effet, le regroupement 6 - 8 - 9 - 10 est obtenu sans condition. Leregroupement 1 - 4 - 5 - 7 - 11 contient des pseudo-�quivalences se ramenant �la condition dÕ�quivalence de 1 et 4, ce qui est v�rifi�.
La cr�ation du tableau des phases ne pose alors aucun probl�me majeur.
Identification des termes : * A : 6 - 8 - 9 - 10
* B : 1 - 4 - 5 - 7 - 11
* C : 2
* D : 3
E = 11 E = 10Etat
Pr�sentEtat Suivant Sortie
E = 00 E = 01 E = 11 E = 10E = 00 E = 01
ABCD
BB--
ABBC
ABBB
AB-A
10-1
111-
-011
0001
Figure 5.2.16 : Matrice r�duite finalement obtenue.

Logique S�quentielle Synchrone Page5.13
5.3. Attribution des variables auxiliaires.
Le tableau des phases obtenu et optimis�, il reste � d�terminer le nombre devariables n�cessaires pour coder les �tats repr�sentatifs du circuit.
Soit n le nombre de lignes de la matrice des phases simplifi�e, le nombre r devariables auxiliaires sera tel que 2r-1 < n £ 2r.
Quel que soit le crit�re de d�finition de la minimalit�, il nÕexiste actuellementaucune m�thode pour d�terminer une relation entre la configuration desvariables interm�diaires et les �tats de la matrice des phases permettantdÕobtenir une r�alisation minimale.
Pour illustrer la m�thode g�n�rale dÕattribution de variables auxiliaires, nousallons partir dÕune matrice des phases repr�sentative dÕun circuit g�n�rant le bitde parit� d'un code DCB (chiffre compris entre 0 et 9) se pr�sentant poidsfaibles en t�te.
1
1/000/00 1/00 0/00 1/00 0/00 1/00 0/00
0/00 1/001/00 0/00
0/00 1/00
0/101/01
0/01 0/01 0/10 0/011/10
0/10 0/10 0/01
3
1
6 74 5
2
8 9 10 11 12 13 14 15
Figure 5.3.1 : Graphe des phases dÕun g�n�rateur de parit� des digits d�cimaux cod� en ASCII.
Si la sortie se limitait � une seule valeur donnant le bit de parit�, on ne pourraitpas distinguer lÕinstant o� le circuit a fini dÕ�chantillonner les 4 bits (instant o�la sortie devient pertinente). On va donc utiliser 2 sorties A et B. A recevra lavaleur de parit�, alors que B indiquera la validit� de A en prenant la valeurcompl�mentaire.
E = 0 E = 1Etat
Pr�sentEtat Suivant Sortie
E = 0 E = 1
1234567
2456711
3547611
00000000001001
00000000000110
Figure 5.3.2 : Matrice des phases associ�e apr�s simplification
Page 5.14 Jacques Guizol & Christian Aperghis
Le graphe repr�sentatif du fonctionnement de ce circuit et la matrice desphases simplifi�e sont respectivement donn�s en figure 5.3.1 et 5.3.2.
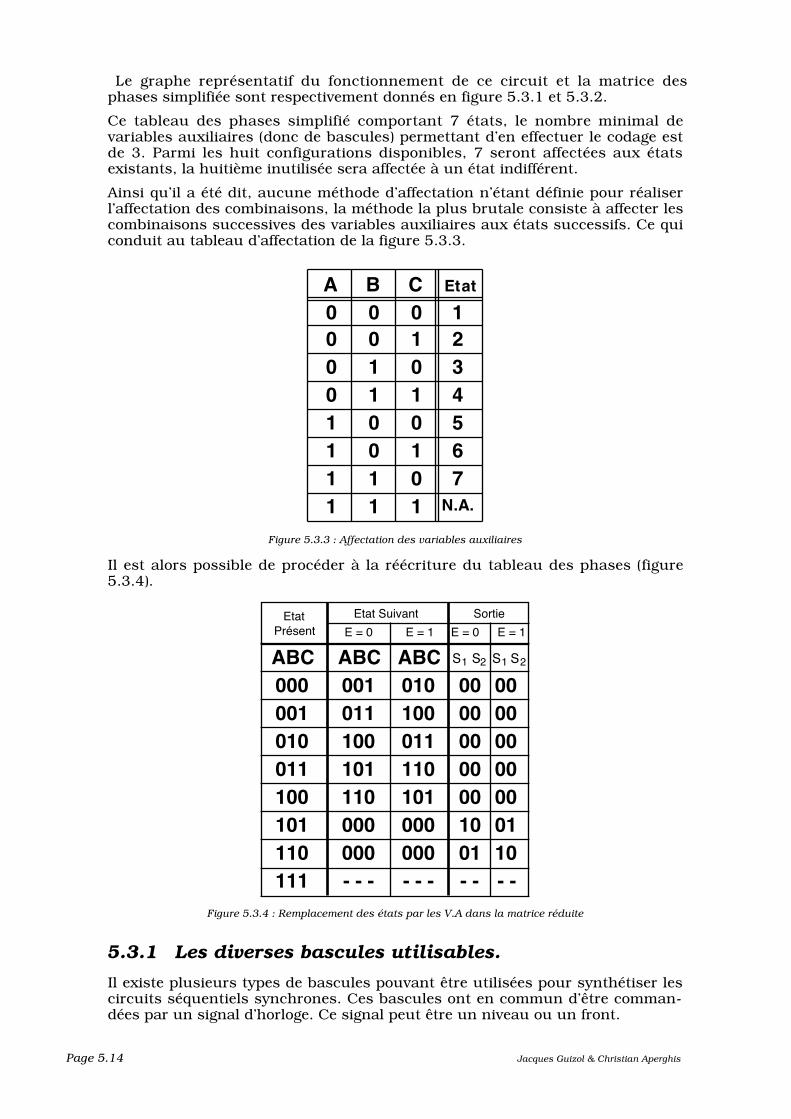
Ce tableau des phases simplifi� comportant 7 �tats, le nombre minimal devariables auxiliaires (donc de bascules) permettant dÕen effectuer le codage estde 3. Parmi les huit configurations disponibles, 7 seront affect�es aux �tatsexistants, la huiti�me inutilis�e sera affect�e � un �tat indiff�rent.
Ainsi quÕil a �t� dit, aucune m�thode dÕaffectation nÕ�tant d�finie pour r�aliserlÕaffectation des combinaisons, la m�thode la plus brutale consiste � affecter lescombinaisons successives des variables auxiliaires aux �tats successifs. Ce quiconduit au tableau dÕaffectation de la figure 5.3.3.
A00001111
B00110011
C01010101
Etat
1234567
N.A.
Figure 5.3.3 : Affectation des variables auxiliaires
Il est alors possible de proc�der � la r��criture du tableau des phases (figure5.3.4).
E = 0 E = 1
Etat Suivant Sortie
E = 0 E = 1Etat
Pr�sent
S1 S2 S1 S2ABC000001010011100101110111
00000000001001- -
00000000000110- -
ABC001011100101110000000- - -
ABC010100011110101000000- - -
Figure 5.3.4 : Remplacement des �tats par les V.A dans la matrice r�duite
5.3.1 Les diverses bascules utilisables.
Il existe plusieurs types de bascules pouvant �tre utilis�es pour synth�tiser lescircuits s�quentiels synchrones. Ces bascules ont en commun dÕ�tre comman-d�es par un signal dÕhorloge. Ce signal peut �tre un niveau ou un front.

Logique S�quentielle Synchrone Page5.15
5555....3333....1111....1111.... LLLLaaaa bbbbaaaassssccccuuuulllleeee RRRRSSSS....
Il sÕagit dÕune bascule � deux entr�es Set et Reset, masqu�es par un signaldÕhorloge permettant la prise en compte du signal � un moment bien pr�cisdans le temps (figure 5.3.5)
H
R
SQ
R
S
H
Q
Figure 5.3.5 : Sch�ma de principe et symbolique de la bascule RS
* Lorsque lÕentr�e S (set) est active, � lÕapparition du signal dÕhorloge,la sortie Q est activ�e.
* Lorsque lÕentr�e R (reset) est active, � lÕapparition du signal dÕhorloge,la sortie Q est d�sactiv�e.
* Lorsque aucune des deux entr�es nÕest activ�e, lÕapparition du signaldÕhorloge ne provoque aucun changement sur la sortie.
5555....3333....1111....2222.... LLLLaaaa bbbbaaaassssccccuuuulllleeee JJJJKKKK
K
J
H
S
H
K
JS
Figure 5.3.6 : Sch�ma de principe et symbolique de la bascule JK
Il sÕagit dÕune bascule � deux entr�es, command�e par un signal dÕhorloge actifsur un front descendant (figure 5.3.6).
* Lorsque lÕentr�e J est active, � lÕapparition du front descendant dusignal dÕhorloge, la sortie est activ�e.
* Lorsque lÕentr�e K est active, � lÕapparition du front descendant dusignal dÕhorloge, la sortie est d�sactiv�e.
* Lorsque aucune des deux entr�es nÕest activ�e, lÕapparition du frontdescendant du signal dÕhorloge ne provoque aucun changement sur lasortie.
* Lorsque les deux entr�es J et K sont simultan�ment activ�es,lÕapparition du front descendant du signal dÕhorloge provoque unecompl�mentation de la sortie.

Page 5.16 Jacques Guizol & Christian Aperghis
5555....3333....1111....3333.... LLLLaaaa bbbbaaaassssccccuuuulllleeee TTTT
H
K
JS
T
Figure 5.3.7 : Sch�ma de principe de la bascule T � partir dÕune JK
CÕest une utilisation sp�cifique de la bascule JK dans laquelle les entr�es J et Ksont simultan�ment command�es (figure 5.3.7).
Dans ces conditions :
* Lorsque lÕentr�e T est active, � lÕapparition du front descendant dusignal dÕhorloge, la sortie est compl�ment�e.
* Lorsque lÕentr�e T est inactive, lÕapparition du front descendant dusignal dÕhorloge ne provoque aucun changement sur la sortie.
5555....3333....1111....4444.... LLLLaaaa bbbbaaaassssccccuuuulllleeee DDDD
H
SD
Figure 5.3.8 : Sch�ma de la bascule D
La bascule D est en fait une m�moire qui, � lÕapparition du front montant delÕhorloge, prend syst�matiquement en compte lÕinformation quÕon lui pr�sentepour la m�moriser (figure 5.3.8).
* Lorsque lÕentr�e D est � lÕ�tat haut, d�s lÕapparition du front montantdu signal dÕhorloge, la sortie passe � lÕ�tat haut.
* Lorsque lÕentr�e D est � lÕ�tat bas, d�s lÕapparition du front montantdu signal dÕhorloge, la sortie passe � lÕ�tat bas.
5.3.2. Utilisation des diverses bascules.
Pour terminer lÕexemple de la figure 5.3.1, il nous faut �crire 6 fonctions,une fonction set et une fonction reset pour chacune des trois bascules ducircuit. Pour chacune dÕelle, la fonction d�pendra des transitions � assurer entrelÕ�tat pr�sent et lÕ�tat suivant.
5555....3333....2222....1111.... UUUUttttiiiilllliiiissssaaaattttiiiioooonnnn ddddeeee bbbbaaaassssccccuuuulllleeeessss RRRRSSSS....
o La bascule est dans lÕ�tat 0 (�tat pr�sent) et doit transiter vers un �tat 0 (�tatsuivant) deux possibilit�s de commande sÕoffrent � nous :
¦ ne rien faire, dans ces conditions la sortie reste donc � 0 ;
¦ commander un reset, dans ces conditions la sortie est forc�e � 0, etdonc en d�finitive ne bouge pas. On dira que lÕon est en pr�sence dÕunreset optionnel que lÕon repr�sentera sur le diagramme deKarnaugh par la lettre r.

Logique S�quentielle Synchrone Page5.17
o La bascule est dans lÕ�tat 1 (�tat pr�sent) et doit transiter vers un �tat 1 (�tatsuivant) deux possibilit�s de commande sÕoffrent � nous :
¦ ne rien faire, dans ces conditions la sortie reste donc � 1 ;
¦ commander un set, dans ces conditions la sortie est forc�e � 1, etdonc en d�finitive ne bouge pas. On dira que lÕon est en pr�sence dÕunset optionnel que lÕon repr�sentera sur le diagramme deKarnaugh par la lettre s.
o La bascule est dans lÕ�tat 1 (�tat pr�sent) et doit transiter vers un �tat 0 (�tatsuivant) Nous nÕavons pas de choix possible, la commande reset doitimp�rativement �tre activ�e. On est en pr�sence dÕun reset obligatoire quelÕon repr�sentera sur le diagramme de Karnaugh par la lettre R.
o La bascule est dans lÕ�tat 0 (�tat pr�sent) et doit transiter vers un �tat 1 (�tatsuivant) Nous nÕavons pas de choix possible, la commande set doitimp�rativement �tre activ�e. On est en pr�sence dÕun set obligatoire quelÕon repr�sentera sur le diagramme de Karnaugh par la lettre S.
Les �tats non utilis�s apparaissent quant � eux comme des indiff�rentsclassiques. LÕapplication de ces principes � la table de la figure 5.3.4 conduitpour la bascule A aux deux diagrammes de la figure 5.3.9.
00
01
11
10
00
S
01
S
S
S
11
-
-
10
s
s
CEAB
00
01
11
10
00
r
r
r
01
r
11
R
R
-
-
10
R
R
CEAB
Figure 5.3.9 : Table de commandes pour bascule RS
Par exemple, �tant dans lÕ�tat cod� 010, on doit pour une entr�e de valeur 0,atteindre lÕ�tat cod� 100 et pour une entr�e de valeur 1, atteindre lÕ�tat cod�011. Donc, dans le premier cas, la bascule A devra subir un set obligatoire,alors que dans le second cas, on pourra lui appliquer un reset optionnel.
La synth�se sÕop�re pour chacune des entr�es en prenant en compte lescommandes obligatoires (lettres majuscules) et en ne consid�rant lescommandes optionnelles (lettres minuscules) que lorsquÕelles induisent unesimplification. On obtient ainsi :
SA = ABE + ACE
RA = AB + AC
Une �tude identique pour les bascules B et C conduit aux �quations :
SB = ABCE + ACE + ABCE
RB = AB +BE et
Sc = ABE + ABCE + ABCE
Rc = AC +CE

Page 5.18 Jacques Guizol & Christian Aperghis
5555....3333....2222....2222.... UUUUttttiiiilllliiiissssaaaattttiiiioooonnnn ddddeeee bbbbaaaassssccccuuuulllleeeessss JJJJKKKK....
L� encore, il nous faut �crire 6 fonctions, une fonction J et une fonction K pourchacune des trois bascules du circuit. Pour chacune dÕelle, la fonction d�pendrades transitions � assurer entre lÕ�tat pr�sent et lÕ�tat suivant.
o La bascule est dans lÕ�tat 0 (�tat pr�sent) et doit transiter vers un �tat 0 (�tatsuivant) deux possibilit�s de commande sÕoffrent � nous :
¦ ne rien faire, dans ces conditions la sortie reste donc � 0 ;
¦ commander un K, dans ces conditions la sortie est forc�e � 0, et doncen d�finitive ne bouge pas. On dira que lÕon est en pr�sence dÕun resetoptionnel que lÕon repr�sentera sur le diagramme de Karnaugh par lalettre k.
o La bascule est dans lÕ�tat 1 (�tat pr�sent) et doit transiter vers un �tat 1 (�tatsuivant) deux possibilit�s de commande sÕoffrent � nous :
¦ ne rien faire, dans ces conditions la sortie reste donc � 1.
¦ Commander un J, dans ces conditions la sortie est forc�e � 1, et doncen d�finitive ne bouge pas. On dira que lÕon est en pr�sence dÕun setoptionnel que lÕon repr�sentera sur le diagramme de Karnaugh par lalettre j.
o La bascule est dans lÕ�tat 1 (�tat pr�sent) et doit transiter vers un �tat 0 (�tatsuivant). Dans ces conditions, il est imp�ratif dÕactionner la commande Kafin de forcer la transition, mais en parall�le, il est possible dÕactiver lacommande J, la combinaison �ventuelle des deux ayant pour effet decompl�menter la sortie et donc de la faire passer de 1 � 0. Ainsi, sur lediagramme de Karnaugh repr�sentatif de la fonction K on fera appara�tre unK majuscule dans la case correspondante et sur le diagramme de Karnaughrepr�sentatif de la fonction J on fera appara�tre un j minuscule dans la casecorrespondante.
o La bascule est dans lÕ�tat 0 (�tat pr�sent) et doit transiter vers un �tat 1 (�tatsuivant). Dans ces conditions, il est imp�ratif dÕactionner la commande J afinde forcer la transition, mais en parall�le, il est possible dÕactiver lacommande K, la combinaison �ventuelle des deux ayant pour effet decompl�menter la sortie et donc de la faire passer de 0 � 1. Ainsi, sur lediagramme de Karnaugh repr�sentatif de la fonction J on fera appara�tre unJ majuscule dans la case correspondante et sur le diagramme de Karnaughrepr�sentatif de la fonction K on fera appara�tre un k minuscule dans la casecorrespondante.
Reprenant la matrice de la figure 5.3.4, nous obtenons, pour la bascule A, lesdiagrammes de Karnaugh repr�sent�s en figure 5.3.10.
00
01
11
10
00
J
01
J
J
J
11
j
j
-
-
10
j
j
j
j
CEAB
00
01
11
10
00
k
k
k
k
01
k
k
k
k
11
K
K
-
-
10
K
K
CEAB
Figure 5.3.10 : Table de commandes pour bascule JK
La synth�se se fait pour chacune des entr�es en prenant en compte lescommandes obligatoires (lettres majuscules) et en ne consid�rant lescommandes optionnelles (lettres minuscules) que si elles conduisent une

Logique S�quentielle Synchrone Page5.19
simplification. On obtient ainsi :
JA = BE +CE
KA = B +C
Pour les bascules B et C, on obtient respectivement :
JB = ACE + ACE + ACE
KB = A +E et
JC = ABE + ABE + ABE
KC = A +E
5555....3333....2222....3333.... UUUUttttiiiilllliiiissssaaaattttiiiioooonnnn ddddeeee bbbbaaaassssccccuuuulllleeeessss TTTT....
Il nous faut �crire 3 fonctions, une pour chacune des bascules. La commande Tdoit �tre activ�e chaque fois quÕune transition 0 -> 1 ou 1 -> 0 appara�t entrelÕ�tat pr�sent et lÕ�tat suivant et ne doit pas lÕ�tre lorsque la bascule ne changepas dÕ�tat. Dans ces conditions, il nÕy a pas de possibilit� de commandeoptionnelle. Par contre les �tats indiff�rents peuvent �tre utilis�s pour lasimplification.
Le diagramme de Karnaugh obtenu pour la bascule A est repr�sent� en figure5.3.11.
00
01
11
10
00
T
01
T
T
T
11
T
T
-
-
10
T
T
CEAB
Figure 5.3.11 : Table de commandes pour bascule T
La fonction TA obtenue est la suivante :
TA = AB + AC +BE +CE
La m�me �tude conduit pour B et C aux fonctions :
TB = AB +BE + ACE + ACE + ABCE
TC = CE + AC + ABE + ABE + ABCE
5555....3333....2222....4444.... UUUUttttiiiilllliiiissssaaaattttiiiioooonnnn ddddeeee bbbbaaaassssccccuuuulllleeeessss DDDD....
Il nous faut, l� aussi, �crire une fonction pour chacune des trois bascules, lar�gle �tant que lÕon ne se pr�occupe pas de lÕ�tat pr�sent, on doit pr�senter surlÕentr�e D la valeur que lÕon veut voir appara�tre pour lÕ�tat suivant.
Ainsi, pour la bascule A le diagramme de Karnaugh est celui repr�sent� enfigure 5.3.12.

Page 5.20 Jacques Guizol & Christian Aperghis
00
01
11
10
00
D
01
D
D
D
11
-
-
10
D
D
CEAB
Figure 5.3.12 : Table de commandes pour bascule D
La fonction obtenue pour la bascule A est :
DA = ABC + ACE + ABE
Et pour les bascules B et C :
DB = ABE + ACE + ABCE + ABCE
DC = ACE + BCE + ABCE
5.3.3. Les partitions.
5555....3333....3333....1111.... PPPPaaaarrrrttttiiiittttiiiioooonnnn ddddeeee llllÕÕÕÕeeeennnnsssseeeemmmmbbbblllleeee ddddeeeessss ����ttttaaaattttssss
Une partition de l'ensemble des �tats est un ensemble form� de sous ensemblesde l'ensemble des �tats tel que chaque �tat appartienne � un sous ensemble et �un seul. La partition form�e d'un seul �l�ment (c'est � dire regroupant la totalit�des �tats s'appelle la partition unit�. La partition comportant autant d'�l�mentsqu'il y a d'�tats (chaque �l�ment ne contenant qu'un seul �tat) s'appelle lapartition z�ro.
Le produit de deux partitions est une partition compos�e des intersections dechacun des �l�ments de la premi�re partition avec chacun des �l�ments de laseconde.
Exemple : {{1,3},{2,4,5},{6,7}} ¥ {{1,2,4},{3,5,6,7}} = {{1},{3},{2,4},{5},{6,7}}
Soient y1Éyk les variables qui codent les 2n �tats dÕun circuit donn�É
o yi induit une partition Qi � 2 �l�ments Qi0 et Qi1 ou
* Qi0 = { y1,É, yi-1, 0, yi+1,É, yn }
* Qi1 = { y1,É, yi-1, 1, yi+1,É, yn }
o yi et yj induisent une partition P � 4 �l�ments P00, P01, P10, P11 o�PklÊ=Ê{Êy1,É, yi-1, k, yi+1,É, yj-1, l, yj+1,É, yn }
On a PklÊ=ÊQik Ç Qjl et donc P = Qi ¥ Qj.
o De fa�on g�n�rale, yi1,É, yip induisent une partition P � 2p �l�ments telle queP = Qi1¥É¥Qip.
Remarque : Chaque �l�ment de la partition P est identifi� par unecombinaison yi1, É, yip.

Logique S�quentielle Synchrone Page 5.21
5555....3333....3333....2222.... SSSSiiiimmmmpppplllliiiiffffiiiiccccaaaattttiiiioooonnnn ddddeeeessss ����qqqquuuuaaaattttiiiioooonnnnssss ddddÕÕÕÕ����ttttaaaatttt
Soient :
¥ y1, É, yn les variables qui codent les �tats.
¥ Y1,É, Yn les valeurs des variables y1,É, yn au temps suivant.
¥ E1,É, Ep les diff�rentes combinaisons d'entr�e.
De mani�re g�n�rale, Yi= Fi(y1,É, yn, E1,É, Ep).
Plus pr�cis�ment,
Yi = Clk
i .Ekl
åæ
èç
ö
ø÷
k=1
p
å o� chaque Clki repr�sente une combinai-
son des y1,É, yn qui code un �tat dont le successeur pour l'entr�e Ek est cod�par une combinaison des Y1,É, Yn telle que Yi = 1.
Par exemple, la figure 5.3.13 repr�sente une partie dÕun tableau des phases.
EtatPr�sent
Etat Suivant
E1
00011110
01101000
Figure 5.3.13 : Exemple
Y1 = C11
1 +C211( ).E1+¼ avec
C111 = y1y2 et C21
1 = y1y2
Y2 = C112 .E1+¼ avec
C112 = y1y2
Yi est �gal � une fonction qui d�pend strictement de yj s'il existe une entr�e Ekpour laquelle :
¶ Il existe un Clki �gal � z1,É, zj,É, zn ;
· tous les autres Clki sont diff�rents de z1,¼z j,¼,zn
avec zh = yh ou zh = yh .
Si " k on a
îïíïì
¥ÊsoitÊ
lkiC = 1
lå
¥ÊsoitÊ
lkiC = yi
lå
¥ÊsoitÊ
lkiC = yi
lå
alors Yi = F(yi ,E1,...,Ep )
Etat Pr�sentEtats Suivants
y1ÉÉyiÉÉyn
. . . . . . 0 . . . . . .
. . . . . . 0 . . . . . .
. . . . . . 1 . . . . . .
. . . . . . 1 . . . . . .
............
Ek1 Ek2 Ek3
Y1ÉÉYiÉÉYn
. . . . . . 1 . . . . . .
. . . . . . 1 . . . . . .
. . . . . . 1 . . . . . .
. . . . . . 1 . . . . . .
............
Y1ÉÉYiÉÉYn
. . . . . . 0 . . . . . .
. . . . . . 0 . . . . . .
. . . . . . 1 . . . . . .
. . . . . . 1 . . . . . .
............
Y1ÉÉYiÉÉYn
. . . . . . 1 . . . . . .
. . . . . . 1 . . . . . .
. . . . . . 0 . . . . . .
. . . . . . 0 . . . . . .
............
Qi0
Qi1
Qi1
Qi0
Qi1
Qi1
Qi0
a b c
Figure 5.3.14 : Cas o� Yi = F(yi, Ei, ..., Ep)

Page 5,22 Jacques Guizol & Christian Aperghis
En dÕautres termes, pour toute entr�e Ek, on a :
¥ soit tous les �tats ont comme successeurs des �tats de Qi1 (figure
5.3.14 a) ;
¥ soit tous les �tats de Qi0 et eux seuls, ont comme successeurs des �tats
de Qi0 (figure 5.3.14 b) ;
¥ soit tous les �tats de Qi0 et eux seuls, ont comme successeurs des �tats
de Qi1 (figure 5.3.14 c) ;
Ainsi, on aura Yi = F(yi ,E1,...,Ep ) si pour chaque Ek les �tats suivants dÕuneclasse de la partition Qi se trouvent tous dans une m�me classe.
La partition Qi poss�de alors la propri�t� de substitution.
DDDD����ffffiiiinnnniiiittttiiiioooonnnn : Une partition de lÕensemble des �tats est uuuunnnneeee ppppaaaarrrrttttiiiittttiiiioooonnnn ���� pppprrrroooopppprrrriiii����tttt���� ddddeeee ssssuuuubbbbssssttttiiiittttuuuuttttiiiioooonnnn
((((PPPPPPPPSSSS)))) si tous les �tats figurant dans une classe ont pour successeurs, ppppoooouuuurrrr cccchhhhaaaaccccuuuunnnneeee
ddddeeeessss ccccoooommmmbbbbiiiinnnnaaaaiiiissssoooonnnnssss dÕentr�e, des �tats situ�s ttttoooouuuussss dans une m�me classe.
TTTThhhh����oooorrrr����mmmmeeee : Pour yi1,..., yin, si P = Qi1,..., Qim est une P.P.S. alors :
ÊÊYi1Ê=ÊFi1(yi1,...,Êyim,Ê...,ÊE1,Ê...,ÊEp);ÊÊÊÊ----------------------------------------;ÊÊÊÊYimÊ=ÊFim(ÊÊyi1,...,Êyim,Ê...,ÊE1,Ê...,ÊEp)ÊÊÊ
D�monstration :
Supposons quÕil existe i h tel que Yi h d�pende strictement, pour une entr�e Ek ,
dÕun yj Ï {y i1, ..., yi m}. Soit le Clkih = z1...z j...zn tel que tous les autres Clk
ih soient
diff�rents de z1...z j...zn o� zt = yt ou yt .
On a z1...z j...zn et z1...z j...zn qui appartiennent � une m�me classe de P, alors
que Succ Ek( z1...z j...zn ) et Succ Ek( z1...z j...zn ) appartiennent � deux classesdiff�rentes de P car :
etSuccEk( z1...z j...zn )Ê=Êr1...yih...rnÊ
SuccEk( z1...z j...zn )Ê=Ê s1...yih ...sn
Donc P nÕest pas une Partition � Propri�t� de Substitution
Si nous reprenons lÕexemple du g�n�rateur de parit� (figure 5.3.15)
E = 0 E = 1Etat
Pr�sent
Etat Suivant Sortie
E = 0 E = 1
1234567
2456711
3547611
00000000001001
00000000000110
Figure 5.3.15 : Reproduction de la figure 5.3.2
Appelons x le bloc {1}, y le bloc {2,3}, z lebloc {4,5} et w le bloc {6,7}.
Avec le bloc y, on v�rifie que pour uneentr�e � 0, le successeur de 2 est 4 alorsque celui de 3 est 5. 2 et 3 forment unbloc ; 4 et 5 forment un bloc ; le succes-seur de tout �tat du bloc y lorsque l'en -tr�e passe � 0 se trouve dans le bloc z.
Par un raisonnement analogue, on cons-tate que pour une entr�e � 1, le succes -seur de tout �tat du bloc y est dans z.
Donc, P = { {1} {2,3} {4,5} {6,7} } est unePPS.

Logique S�quentielle Synchrone Page 5.23
Sur les trois variables n�cessaires pour coder les �tats du circuit, deux peuvent�tre utilis�es pour induire le codage de la partition P.
Si nous choisissons A et B, on aura alors P = QA . Q B et donc les comman desdes bascules associ�es � A et B ne d�pendent que de A, de B et des entr�es.
Il est alors possible de proc�der � une attribution des variables (figure 5.3.16)
{1} x 0 0A B A B C
0 0 *0 1 00 1 11 1 11 1 01 0 01 0 1
Etats1234567
{2,3} y 0 1
{4,5} z 1 1
{6,7} w 1 0
Partition
Figure 5.3.16 : Attribution des variables induisant une partition.
Qui nous donne la matrice des �tats de la figure 5.3.17 :
E = 0 E = 1
Etat Suivant Sortie
E = 0 E = 1Etat
Pr�sent
S1 S2 S1 S2ABC00-010011111110100101
00000000001001
00000000000110
ABC01011111010010100-00-
ABC01111011110110000-00-
Figure 5.3.17 : Matrice des �tats prenant en compte la PPS
DÕo� les �quations dÕ�tats pour une r�alisation � partir de bascules RS :
SA = B
SB = A
SC = BE +BCE
RA = B
RB = A
RC = CE
Et les �quations pour les variables de sortie :
S1 = ABCE + ABCE S2 = ABCE + ABCE
Il est facile de constater la simplification consid�rable des �quations dÕ�tatsquÕapporte la m�thode. Un examen attentif du tableau dÕ�quivalence de la figure5.3.16 explique le ph�nom�ne, Dans chacune des lignes de cette table, les deuxpremiers bits de lÕ�tat suivant d�pendent exclusivement des deux premiers bitsde lÕ�tat pr�sent. Ceci a pour cons�quence de ne faire d�pendre les entr�es des

Page 5,24 Jacques Guizol & Christian Aperghis
bascules A et B que des sorties de ces m�mes bascules. Les fonctionscorrespondantes seront en d�finitive des fonctions de deux variables au lieudÕ�tre des fonctions de quatre variables.
5555....3333....3333....3333.... RRRReeeecccchhhheeeerrrrcccchhhheeee ddddeeeessss PPPPPPPPSSSS....
La recherche des PPS pour une matrice des phases donn�e ne peut sÕeffectuerque de mani�re exhaustive.
Pour chaque paire dÕ�tats {Ei,Ej} :
¶ {Ei,Ej} forme une classe.
· Pour chaque classe, on produit les classes dÕ�tats successeurs :
Si Q = { Ei 1,..., Eip } est une classe, chaque entr�e ek d�termine uneclasse dÕ�tats successeurs QSek = { Succek(Ei1), ..., Succek(Eip) }.
¸ Fusionner les classes qui ont un �l�ment en commun.
¹ SÕil nÕy a plus quÕune classe qui contienne tous les �tats (partition unit�)ou si au moins une classe contient des �tats incompatibles, alors il ya �chec dans la recherche de PPS ; Ei et Ej sont incompatibles.
sinon sÕil existe des �tats qui ne sont dans aucune base, aller en ·
sinon, on a alors une partition. On v�rifie quÕelle poss�de lapropri�t� de substitution. Si ce nÕest pas le cas, Ei et Ej sontincompatibles.
Nous allons appliquer la m�thode sur le tableau des phases de la figure 5.3.15.
+ Initialisons la recherche avec le bloc �{1-2}.
Lorsque lÕentr�e prend la valeur 0, les successeurs de 1 et de 2 sont 2 et 4.D'apr�s la d�finition, 2 et 4 doivent se trouver dans le m�me bloc, 2 faisant d�j�partie d'un bloc, 4 doit imp�rativement faire partie du m�me bloc pour que lapropri�t� de substitution soit v�rifi�e.
Nous cr�ons donc le bloc {1-2-4}
Par ailleurs, lorsque l'entr�e prend la valeur 1, les successeurs de 1 et 2 sont 3et 5 qui doivent former un nouveau bloc, ce qui nous donne {1-2-4} , {3-5}
ClassePr�sente
Classe Suivante
E = 0 E = 1
{1,2}
{1,2,4}
{3,5}
{1,2,4,6}
{3,5,7}
{1,2,3,4,5,6,7}
{2,4}
{2,4,6}
{5,7}
{2,4,6,1}
{5,7,1}
{3,5}
{3,5,7}
{4,6}
{3,5,7,1}
{4,6,1}
1234567
02456711
13547611
E.P.E.S.
Echec : Partition Unit�Figure 5.3.18 : Recherche dÕune PPS avec initialisation {1,2}
Si nous consid�rons maintenant les successeurs de 3 et de 5 , nous trouvonspour une entr�e de valeur 0, les �tats 5 et 7 ce qui revient � cr�er le bloc {3-5-7}puisque {3-5} Ç {5-7} ¹Ê¯. Ce qui nous donne {1-2-4} , {3-5-7}
Pour une entr�e de valeur 1, les �tats 3 et 5 ont pour successeurs 4 et 6 dÕo�cr�ation dÕun nouveau bloc {1-2-4-6} , {3-5-7}.

Logique S�quentielle Synchrone Page 5.25
Finalement, lÕexamen des successeurs de 5 et 7 pour une entr�e de valeur 0,soit 7 et 1, conduit � la partition unit� {1-2-3-4-5-6-7}
La tentative de cr�er une PPS en partant du bloc {1-2} se solde par un �chec.
+ Nouvel essai � partir du bloc {1-3}.
v e = 0 â {{1-3} , {2-5}}v e = 1 â {{1-3-4} , {2-5}}
3 et 4 dans le premier bloc donnent :
v e = 0 â {{1-3-4} , {2-5-6}}v e = 1 â {{1-3-4-7} , {2-5-6}}
4 et 7 dans le premier bloc conduisent � :
v e = 0 â {1-2-3-4-5-6-7}. Echec
ClassePr�sente
Classe Suivante
E = 0 E = 1
{1,3}
{1,3,4}
{2,5}
{1,3,4,7}
{2,5,6}
{2,5}
{2,5,6}
{4,7}
{2,5,6,1}
{3,4}
{3,4,7}
{5,6}
Echec : 1 et 2 ne peuventappartenir � une m�me classe
Figure 5.3.19 : Recherche PPS avec init {1,3}
Nouvelle tentative � partir de {1-4}v e = 0 â {{1-4} , {2-6}}v e = 1 â {{1-4} , {2-6} , {3-7}}
Avec le bloc 2-6
v e = 0 â {{1-4} , {2-6} , {3-7}}v e = 1 â {{1-4-5} , {2-6} , {3-7}}
Avec le bloc 3-7
v e = 0 â {{1-4-5} , {2-6} , {3-7}}v e = 1 â {{1-4-5} , {2-6} , {3-7}}
Avec le couple 1-4
v e = 0 â {{1-4-5} , {2-6-3-7}}v e = 1 â {{1-4-5} , {2-6-3-7}}
Avec le couple 2-7
v e = 0 â {{1-4-5} , {2-6-3-7}}v e = 1 â {{1-4-5} , {2-6-3-7}}
ClassePr�sente
Classe Suivante
E = 0 E = 1
{1,4}
{1,4}
{2,6}
{3,7}
{1,4,5}
{2,6}
{3,7}
{1,4,5}
{2,3,6,7}
{2,6}
{2,6}
{1,4}
{1,5}
{2,6,7}
{1,4}
{1,5}
{2,3,6,7}
{1,4,5}
{3,7}
{3,7}
{1,5}
{1,4}
{3,6,7}
{1,5}
{1,4}
{2,3,6,7}
{1,4,5}
Figure 5.3.20 : Recherche PPS avec init {1,4}
Toutes les possibilit�s ont �t� explor�es, la partition que nous venons de mettreen �vidence est une PPS comportant donc 2 classes :
XÊ=Ê{1-4-5}ÊetÊYÊ=Ê{2-6-3-7}
Notons au passage que cette PPS n'est pas unique. Nous avons vupr�c�demment (¤ 5.3.3.2) que {{2-3} , {4-5} , {6-7} , {1}} est aussi une PPS pourle circuit �tudi�.
5555....3333....3333....4444.... LLLLeeeessss ����qqqquuuuaaaattttiiiioooonnnnssss ddddeeee ssssoooorrrrttttiiiieeee....
Nous avons jusquÕici �tudi� plus particuli�rement lÕassignation des variablesauxiliaires conduisant au circuit combinatoire le plus simple pour ce qui est dela commande des successions dÕ�tats en ignorant le circuit combinatoire quidoit au bout du compte g�n�rer les diff�rentes sorties du syst�me s�quentiel.
De fait, cette partie du circuit est g�n�ralement moins complexe que cellerelative aux changements dÕ�tats. Il nÕen demeure pas moins que la simplifica-tion de la logique de sortie contribue � diminuer le co�t g�n�ral de r�alisationdu circuit.

Page 5,26 Jacques Guizol & Christian Aperghis
Le probl�me pos� est identique � celui que nous venons de voir, � savoirlÕattribution des variables auxiliaires aux diff�rents �tats car, d�s lors, lastructure du circuit logique de sortie est enti�rement fix�e. La m�thode despartitions � propri�t�s de substitution laisse toutefois certains degr�s de libert�dans le choix de lÕattribution des variables auxiliaires permettant uneoptimisation de la logique de sortie.
Si lÕon doit coder 2 p �tats et si lÕon a une PPS � 2 q classes (q < p) alors qvariables auxiliaires seront utilis�es pour coder les 2 q classes et les p-qvariables auxiliaires restantes seront utilis�es librement pour identifier chaque�tat. Ce facteur de libert� va nous permettre de proc�der � une simplificationdes sorties.
Une partition est une Partition de Groupement de Sorties (PGS) si tous les�tats dÕune classe correspondent � une m�me sortie ou � des sorties noncontradictoires.
RRRReeeemmmmaaaarrrrqqqquuuueeeessss : Une PGS ne peut en aucun cas �tre une PPS, cela signifierait que la matrice des phases
nÕest pas simplifi�e.
Les sorties ne d�pendent que des entr�es et des variables auxiliaires utilis�es pour coder
les classes de la PGS.
Un circuit sera compl�tement simplifi� si on trouve une PPS et une PGS compatibles.
Soit par exemple la matrice des phases de la figure 5.3.21 dans laquelle il estais� de d�terminer la PPS {{1-2} , {3-4}}
E = 0 E = 1Etat
Pr�sentEtat Suivant Sortie
E = 0 E = 1
1234
2143
4312
1001
0110
FigureÊÊ4.3.21Ê:ÊMatriceÊdeÊphasesÊdeÊd�part.
PPS = {{1,2},{3,4}}
La figure 5.3.21 montre quÕune mauvaise attribution des variables (a), conduit �la matrice cod�e (b).
E = 0 E = 1
Etat Suivant Sortie
E = 0 E = 1Etat
Pr�sent
AB00011011
AB01001110
AB11100001
S1001
S0110
1234
AB00011011
a bFigure 5.3.21 : Exemple de mauvaise attribution des variables.
DÕo�, les �quations suivantes, si on d�cide dÕutiliser des bascules T pour lar�alisation finale :
TA = e
TB = e + A
S = ABe + ABe + ABe + ABe

Logique S�quentielle Synchrone Page 5.27
Une bonne attribution consisterait � mettre en �vidence le fait que les sortiesdes �tats 1 et 4 et des �tats 2 et 3 peuvent �tre regroup�es pour former une PGS{{1-4} , {2-3}} . Ceci nous permet de proc�der � une attribution des variablesauxiliaires mieux adapt�e (figure 5.3.22).
E = 0 E = 1
Etat Suivant Sortie
E = 0 E = 1Etat
Pr�sent
AB00011110
AB01001011
AB10110001
S1001
S0110
b
1234
AB00011110
aFigure 5.3.22 : Attribution des variables tenant compte de la PGS.
Ce r�sultat est obtenu en utilisant la variable A pour distinguer les deux blocsde la PGS ({1,4} et {2,3}), et la variable B pour distinguer les deux blocs de la PPS({1,2} et {3,4}). Cette attribution nous permet dÕaboutir � la matrice de la figure5.3.22 et la r�alisation au moyen de bascules T nous am�ne aux �quationssuivantes :
TA = e
TB = e + A
S = Be +Be
o� la sortie S ne d�pend pas de A.
5.4. D�composition fonctionnelle et partitions.
5.4.1 D�composition � lÕaide de PPS
Donnons (ou rappelons) tout dÕabord quelques d�finitions :
DDDD����ffffiiiinnnniiiittttiiiioooonnnn 1111 : La partition triviale ne comportant quÕun seul bloc regroupant tous les �tats est appel�e
ppppaaaarrrrttttiiiittttiiiioooonnnn uuuunnnniiiitttt����.
DDDD����ffffiiiinnnniiiittttiiiioooonnnn 2222 : La partition triviale comportant autant de blocs que ce quÕil y a dÕ�tats (un �tat par bloc)
est appel�e ppppaaaarrrrttttiiiittttiiiioooonnnn zzzz����rrrroooo.
DDDD����ffffiiiinnnniiiittttiiiioooonnnn 3333 : Le produit de deux partitions est la partition obtenue en prenant les intersections de
chacun des blocs de la premi�re partition avec chacun des blocs de la seconde.
Exemple : {{1, 3}, {2, 4, 5}, {6, 7}} . {{1, 2, 4}, {3, 5, 6, 7}} = {{1}, {3}, {2, 4}, {5}, {6,7}}
DDDD����ffffiiiinnnniiiittttiiiioooonnnn 4444 : Deux partitions sont oooorrrrtttthhhhooooggggoooonnnnaaaalllleeeessss si leur produit donne la partition z�ro.
Dans lÕexemple ci-dessus, on peut v�rifier que PPS et PGS sont orthogonales.
5555....4444....1111....1111.... DDDD����ccccoooommmmppppoooossssiiiittttiiiioooonnnn eeeennnn ccccaaaassssccccaaaaddddeeee....
TTTThhhh����oooorrrr����mmmmeeee : L'existence d'une PPS sur l'ensemble des �tats d'un syst�me s�quentiel autorise la
d�composition de ce syst�me en deux sous-syst�mes plac�s en cascade. Le premier de
ces sous-syst�mes d�fini par la PPS n'est fonction que des variables d'entr�e, le second,
d�fini par une partition orthogonale � la PPS, est fonction des variables d'entr�e et de
l'�tat dans lequel se trouve le premier sous-syst�me.
La figure 5.4.1. donne le sch�ma de principe dÕune telle d�composition.

Page 5,28 Jacques Guizol & Christian Aperghis
Machine 1 Machine 2
BB
Horloge
Entr�e
Sortie
Figure 5.4.1 : Sch�ma de principe dÕune d�composition cascad�e
Nous allons sur lÕexemple de la figure 5.4.2, montrer comment on peut d�com -poser le syst�me s�quentiel et d�finir la succession des �tats pour chacun dessous-syst�mes composants.
E = 0 E = 1Etat
Pr�sentEtat Suivant Sortie
E = 0 E = 1
1234567
5736142
4163751
0000001
1010100
Figure 5.4.2 : Matrice des phases dÕun circuit � cascader.
La matrice des phases repr�sent�e admet une PPS {{1-3-5} , {2-4-6-7}}.
Consid�rons un premier sous-syst�me M1 � deux �tats, chacun correspondant �un des deux �tats de la PPS :
EtatPr�sent
Etat Suivant
E = 0 E = 1
JK
JK
KJ
avec
îïïíïïìJÊ=Ê{1-3-5}
ÊÊÊÊÊet
KÊ=Ê{2-4-6-7}
Figure 5.4.3 : Matrice dÕ�tats du sous-syst�me M1.
Il est alors indispensable pour r�aliser la machine M 2 de cr�er une nouvellepartition qui soit orthogonale � la PPS, par exemple {{1-6} , {4-5} , {2-3} ,{ 7}}
Cette partition qui nÕest pas une PPS, permet de d�finir un second sous-syst�me� 4 �tats (P, Q, R, S). Elle se doit dÕ�tre orthogonale � la pr�c�dente afin que leurproduit mettre en �vidence la partition z�ro, la seule qui isole les �tats. Ainsitoute paire form�e par un �tat de M 1 et un �tat de M2 correspond � un �tat deM et � un seul, un des �tats de la matrice des phases r�duite de d�part.
La machine M2, sera pilot�e par la machine M1. Ses variables d'entr�e seront lesvariables d'entr�e de M (dans le cas qui nous int�resse, une seule entr�e E), et

Logique S�quentielle Synchrone Page 5.29
les variables repr�sentatives de l'�tat de la machine M 1, selon le tableau de lafigure 5.4.4.
EtatPr�sent
Etat Suivant
E = 0 E = 1
PQRS
QPR-
QPSR
QRPP
QSP-
J K J K
avec
îïíïì
ÊÊPÊ=Ê{1-6}
ÊÊQÊ=Ê{4,5}
ÊÊRÊ=Ê{2-3}
ÊÊSÊ=Ê {7}
Figure 5.4.4 : Table des �tats de M2 en fonction des entr�es et des �tats de M1
Comment avons nous proc�d� pour la construction de ce tableau ?
Soit � d�terminer le successeur de lÕ�tat P dans le cas ou la machine M1 estdans lÕ�tat J et que lÕentr�e prend la valeur 0.
¶ Si la machine M1 est dans lÕ�tat J et que la machine M2 est dans lÕ�tatP, cela signifie que lÕ�tat �quivalent de la machine M correspond �lÕintersection des classes J et P, soit 1.
· On voit sur le tableau des phases de la figure 5.4.2 que le successeurde lÕ�tat 1 lorsque lÕentr�e prend la valeur 0 est lÕ�tat 5.
¸ On constate par ailleurs sur la matrice des phases de la machine M 1le successeur de lÕ�tat J lorsque lÕentr�e prend la valeur 0 est J.
¹ La machine M2 doit donc dans ces conditions passer dans un �tat Xtel que X Ç J = 5 soit X Q= .
Ces op�rations sont � renouveler pour chacune des cases de la matricerepr�sentative de la machine M2.
La matrice des sorties est repr�sent�e en figure 5.4.5.
EtatPr�sent
Etat Suivant
E = 0 E = 1
PQRS
000-
0001
0000
111-
J K J K
Figure 5.4.5 : Matrice des sorties du syst�me
La construction de ce tableau ob�it aux r�gles suivantes :
Soit � d�terminer lÕ�tat de la sortie dans le cas o� la machine M1 est dans lÕ�tatJ, la machine M2 est dans lÕ�tat P alors que lÕentr�e prend la valeur 0.
¶ Si la machine M1 est dans lÕ�tat J et que la machine M2 est dans lÕ�tatP, cela signifie que lÕ�tat �quivalent de la machine M correspond �lÕintersection des classes J et P, soit 1.
· On voit sur le tableau des phases de la figure 5.4.2 que lorsque lamachine M est dans lÕ�tat 1, la transition associ�e � une entr�e devaleur 0, g�n�re une sortie � 0.

Page 5,30 Jacques Guizol & Christian Aperghis
Ces op�rations sont � renouveler pour chacune des cases de la matrice de sortierepr�sentative de la machine M2.
En conclusion, lÕ�tablissement de ces tables nÕoffre pas de difficult� particuli�re.En effet, toute partition d�finit une relation dÕ�quivalence, ce qui signifie que les�tats dÕun m�me bloc sont �quivalents entre eux et que les tables des figures5.4.3 et 5.4.4 sont relatifs aux classes dÕ�quivalence. Nous terminons par lar�alisation qui sera bas�e sur lÕutilisation de bascules T. La figure 5.4.6 montrelÕ�tude de la machine M1.
EtatPr�sent
Etat Suivant
E = 0 E = 1
A01
A01
A10
EA
0
1
1
1
0ÊÊÊ Ê1
TA = E
Figure 5.4.6 : R�alisation de la Machine M1 en utilisant des bascules T
La figure 5.4.7 repr�sente la r�alisation de la partie �tat de la machine M2 enfonction des entr�es (E) de lÕ�tat de M1 (A) et de lÕ�tat pr�c�dent de M2 (B et C).
EtatPr�sent
Etat Suivant
E = 0 E = 1
BC00011110
A=0 A=1
BC010011-
BC01001011
BC011000
-
BC011100
00
A=0 A=1
EA
BC
00
01
11
10
00
-
01 11 10
1
1
-
1
1
1
TB = EC+EAB
EA
BC
00
01
11
10
00 01 11 10
1
1
-
1
1
-
1
1
1
1
1
1
1
Tc = BC+BA+EA+ABC
Figure 5.4.7 : R�alisation de la partie �tat de la machine M2.
Enfin, il ne reste plus quÕ� r�aliser la fonction produisant la sortie de M, cÕest �dire la sortie de M2 en fonction des entr�es et des �tats des 2 machines..
EA
BC
00
01
11
10
00
-
01
1
11 10
1
-
1
1
S = EBC+EA
EtatPr�sent
Etat Suivant
E = 0 E = 1
PQRS
000-
0001
0000
111-
J K J K
Figure 5.4.8 : R�alisation de la sortie de M2.

Logique S�quentielle Synchrone Page 5.31
5555....4444....1111....2222.... DDDD����ccccoooommmmppppoooossssiiiittttiiiioooonnnn eeeennnn ppppaaaarrrraaaallllllll����lllleeee....
L'existence de deux PPS orthogonales entre elles dans l'ensemble des �tats d'unsyst�me s�quentiel entra�ne l'existence d'une d�composition en deux soussyst�mes plac�s parall�lement l'un � l'autre, l'�tat de chacun des sous-syst�mesn'�tant fonction que des variables d'entr�e de la machine initiale.
Le sch�ma g�n�ral d'une telle machine est repr�sent� en figure 5.4.9.
B
Machine 2
Machine 1
B
Horloge
Entr�e
Sortie
ÊÊC
ircui
t
Com
binato
ire
Figure 5.4.9 : Sch�ma de principe dÕune d�composition en parall�le.
Soit par exemple le syst�me s�quentiel d�fini par la matrice des phases de lafigure 5.4.10.
EtatPr�sent
Etat SuivantSortie
E = 0 E = 1
123456
465213
332544
000100
Figure 5.4.10 : Matrice des phases
Il est ais� de v�rifier qu'il existe une premi�re PPS {{1-2-3} , {4-5-6}} et unedeuxi�me PPS {{1-6} , {2-5} , {3-4}} . De plus, ces deux PPS pr�sentent laparticularit� d'�tre orthogonales entre elles.
Soient les blocs
îïíïì
ÊÊâÊÊÊJÊ=Ê{1-2-3}ÊÊâÊÊÊKÊ=Ê{4-5-6}ÊÊâÊÊÊPÊ=Ê{1-6}ÊÊâÊÊÊQÊ=Ê{Ê2-5}ÊÊâÊÊÊRÊ=Ê{Ê3-4}
ÊÊÊÊ
IlsÊd�finissentÊdeuxÊmachinesparall�lesÊM1ÊetÊM2ÊqueÊnouspouvonsÊrepr�senterÊparÊleurstableauxÊdesÊphasesÊ(fig.Ê4.4.11)

Page 5,32 Jacques Guizol & Christian Aperghis
EtatPr�sent
Etat Suivant
E = 0 E = 1
PQR
RRQ
RPQ
Machine M 2
EtatPr�sent
Etat Suivant
E = 0 E = 1
JK
JK
KJ
Machine M 1
Figure 5.4.11 : Tables des phases des 2 machines d�termin�es par les PPS
Le mode de construction de ces tables ne diff�re en rien de ce qui a �t� vujusquÕ� pr�sent. Ainsi, par exemple, sur la ligne Q pour la colonne E = 1, onporte la r�f�rence du bloc R car tous les successeurs de P lorsque l'entr�e prendla valeur 1 se trouvent dans le bloc en question.
LÕattribution des variables auxiliaires peut se faire comme suit :
Machine M1 : â Etat J -> A = 0
â Etat K -> A = 1
Machine M2 : â Etat P -> B = 0, C = 0
â Etat Q -> B = 0, C = 1
â Etat R -> B = 1, C = 1
Ce qui nous donne les matrices cod�es de la figure 5.4.12.
.
EtatPr�sent
Etat Suivant
E = 0 E = 1
BC000111
BC111101
BC110001
Machine M 2
EtatPr�sent
Etat Suivant
E = 0 E = 1
A01
A10
Machine M 1
A01
Figure 5.4.12 : Affectation des valeurs des variables
Et une r�alisation au moyen de bascules T conduit aux �quations dÕ�tatssuivantes :
TA = E
TB = E +B +C
TC = EB +C
Pour ce qui est de la sortie, il suffit de mettre en application ce qui a �t� dit ausujet des partitions orthogonales, � savoir que le produit de deux partitionsorthogonales donne la partition unit�. Ainsi, un bloc de la machine M1 et unbloc de la machine M 2 d�finissent un �tat et un seul, ce quÕil est facile derepr�senter (figure 5.4.13).
JK
P16
Q25
R34
M1M2
01
0000
0100
1101
ABC
10--
Figure 5.4.13 : Table de correspondance des �tats de M avec ceux de M1/M2 et matrice de sortie

Logique S�quentielle Synchrone Page 5.33
Ce qui conduit � lÕ�quation de sortie S = AB.
DÕo� le circuit final de la figure 5.4.14.
TC
TA
TB
M1
M2
E S
Figure 5.4.14 : R�alisation du circuit selon le sch�ma de la figure 5.4.9.
5.5. D�composition en lÕabsence de PPS.
Nous avons vu jusqu'� pr�sent que l'existence d'une PPS entra�nait la possibilit�d'une d�composition fonctionnelle. Toutefois la probabilit� de mettre en�vidence une PPS sur un tableau des phases pris au hasard est extr�mementfaible, d'o� lÕint�r�t de m�thodes de d�composition applicables en lÕabsence dePPS.
Lorsque le sous-syst�me, dont l'�tat ne d�pend que des variables d'entr�e, estdonn� par avance (utilisation de circuits int�gr�s standards) cette proc�durer�v�le tout son int�r�t.
5.5.1. Le circuit impos� est un registre � d�calage.
Un registre � d�calage est un dispositif simple et peu co�teux repr�sent� enfigure 5.5.1
Xn X3 X2 X1Xe Xs
Figure 5.5.1 : Repr�sentation g�n�rale dÕun registre � d�calage.
A un instant donn�, une information Xe entre dans le registre, en s'inscrivantdans la position Xn cette information chasse l'ancien contenu de X n en X n-1 etainsi de suite jusqu'en X 1 qui est perdu. En quelque sorte, un registre �d�calage permet de m�moriser lÕ�v�nement actuel et les n-1 �v�nements qui ontpr�c�d�.
Ainsi, lorsque la sortie d�pend d'un nombre fini de symboles d'entr�e successifs,m�moriser ce nombre de symboles permet de r�duire le circuit s�quentiel et�ventuellement de le ramener � un simple syst�me combinatoire.

Page 5,34 Jacques Guizol & Christian Aperghis
Soit une machine qui d�tecte la s�quence 1, 1, 0, il est clair que le fait deconna�tre � tout instant les deux valeurs prises par l'entr�e aux instants n-1 etn-2 nous permet lorsque se pr�sente la valeur au temps n de d�terminer l'�tatde la sortie par une simple combinaison de ces trois valeurs (figure 5.5.2).
Xn Xn-1 Xn-2
Sortie
Figure 5.5.2 : Montage detecteur de s�quence 110 avec registre � d�calage.
Ainsi, sÕil est possible de mettre en �vidence une telle d�composition sur untableau des phases donn�, la r�alisation du circuit correspondant en serasimplifi�e.
LÕarbre dÕambigu�t� va nous permettre dÕaboutir � ce r�sultat. Sa racine estform� de l'ensemble de tous les �tats, et les diverses branches sont obtenuespar partitionnements successifs en fonction de la variable d'entr�e. Si, unnombre fini n de partitionnements conduit pour chaque feuille terminale un �tatunique, alors le syst�me s�quentiel se r�alise en utilisant un registre � d�calagede longueur n et un circuit combinatoire.
Etudions cette d�composition sur un circuit dont le tableau des phases estdonn� figure 5.5.3.
E = 0 E = 1Etat
Pr�sentEtat Suivant Sortie
E = 0 E = 1
12345
24332
15111
10101
01101
Figure 5.5.3 : Matrice des phases.
A partir de lÕ'ensemble des �tats {1,2,3,4,5}, on constate que l'ensemble dessuccesseurs de cet ensemble pour E = 0 est {2,3,4}.
En effet pour E = 0, â le successeur de 1 est 2
â le successeur de 2 est 4
â le successeur de 3 est 3
â le successeur de 4 est 3
â le successeur de 5 est 2
De la m�me fa�on, on d�termine les successeurs de lÕensemble {1,2,3,4,5} pourE = 1. Ceux-ci d�finissent lÕensemble {1,5}.
En effet pour E = 1, â le successeur de 1 est 1
â le successeur de 2 est 5
â le successeur de 3 est 1
â le successeur de 4 est 1
â le successeur de 5 est 1.

Logique S�quentielle Synchrone Page 5.35
La racine de l'arbre {1,2,3,4,5} se scinde en deux branches (figure 5.5.5)
{1,2,3,4,5}
{2,3,4} {1,5}
E=0 E=1
Figure 5.5.5 : Partitionnement de lÕensemble de d�part
La construction de lÕarbre sÕach�ve lorsquÕon aboutit � un noeud tel que :
¶ ce noeud existe d�j� parmi ses anc�tresET
· tous les noeuds de m�me niveau que lui ont un nombredÕ�tats inf�rieur ou �gal au sien (figure 5.5.6).
Le nombre minimal dÕ�tats du circuit s�quentiel est exactement le nombredÕ�tats du noeud qui a provoqu� lÕarr�t. Le nombre dÕ�tage du registre �d�calage sera �gal au nombre de niveaux de lÕarbre. Si lÕon poursuivait laconstruction de lÕarbre, les niveaux suivants contiendraient soit des noeudsdont le nombre dÕ�tats est au plus �gal au nombre dÕ�tats du noeud ayantprovoqu� lÕarr�t (par d�finition), soit au noeud lui m�me (car il est son propreanc�tre).
{1,2,3,4,5}
{2,3,4} {1,5}
E=0 E=1
{3} {1} {2} {1} {4} {5} {2} {1}
{3,4} {1,5} {2} {1}
Niveau 1
Niveau 2
Niveau 3
E=0 E=1 E=0 E=1
E=0 E=1 E=0 E=1 E=0 E=1 E=0 E=1
Figure 5.5.6 : Arbre dÕambig�it� total
Dans notre exemple, lÕarbre se termine en 3 niveaux et chaque feuille terminaleest repr�sentative d'un et un seul �tat de la machine. Le syst�me peut �trer�alis� en utilisant un registre � d�calage de longueur 3 et un circuitcombinatoire pour g�n�rer la sortie selon le sch�ma de principe de la figure5.5.7.
E3 E2 E1E
SortieCircuitCombinatoire
Figure 5.5.7 : Principe de r�alisation du syst�me d�crit par la MP fig. 5.5.3

Page 5.36 Jacques Guizol & Christian Aperghis
Pour la r�alisation, chaque feuille terminale de lÕarbre est d�finie par le cheminqui a permis dÕy aboutir (figure 5.5.8a). Ce qui nous permet de construire lediagramme de Karnaugh repr�sentatif de l'�tat de la sortie (figure 5.5.8b).
D'o� la fonction :
S = E1E2E3 + E2E3E + E1E2E3 + E3E
31214521
E1
00001111
E2
00110011
E3
01010101
0011
1
01
1
1
11
1
1
10
11
00
0111
10
E1E2
E3E
Figure 5.5.8 : a)Configuration du registre � d�calage pour chacun des �tatsb) Ecriture de la matrice de sortie en fonction de lÕentr�e et du registre � d�calage
Si, par exemple, nous consid�rons lÕ�tat 1, la sortie prend la valeur 1 pour E =0. LÕ�tat 1 est atteint selon 3 configurations du registre � d�calage : 001, 011 et111. Dans la matrice de sortie, nous trouverons donc un 1 en 0010, 0110 et1110. On proc�de de m�me pour compl�ter la matrice.
Les circuits qui admettent une d�composition aussi �l�mentaire (registre � d�ca-lage + circuit combinatoire) sont extr�mement rares. Toutefois, une d�composi-tion de ce type conduit souvent � une r�alisation simplifi�e demandant unregistre � d�calage suivi d'un circuit s�quentiel. Ce type de d�composition seraaussi mis en �vidence par un arbre dÕambigu�t�, lequel sera construit, ainsi quenous l'avons d�j� vu, jusqu'� ce que les conditions dÕarr�t soient rencontr�es.
Soit un circuit g�n�rateur de bit dÕimparit� sur 4 bits, d�fini par son tableau desphases (figure 5.5.9).
Son arbre dÕambigu�t� est donn� dans la figure 5.5.10
Etat Suivant
E = 0 E = 1Etat
Pr�sent
1234567
2456711
3547611
Figure 5.5.9 : Matrice des phases
Logique S�quentielle Synchrone Page 5.37
{1,3,5,6,7} {1,2,5,6,7}{1,2,4,6,7} {1,3,4,6,7}
{1,2,3,4,5,6,7}
{1,2,4,5,6,7} {1,3,4,5,6,7}
E=0 E=1
{1,2,4,6} {1,3,5,7} {1,2,5,7} {1,3,4,6} {1,2,4,7} {1,3,5,6} {1,2,5,6} {1,3,4,7}
E=0 E=1 E=0 E=1
E=0 E=1 E=0 E=1 E=0 E=1 E=0 E=1
{1,2,4,6}
E=0
Figure 5.5.10 : Table dÕambigu�t� du g�n�rateur de bit dÕimparit�.
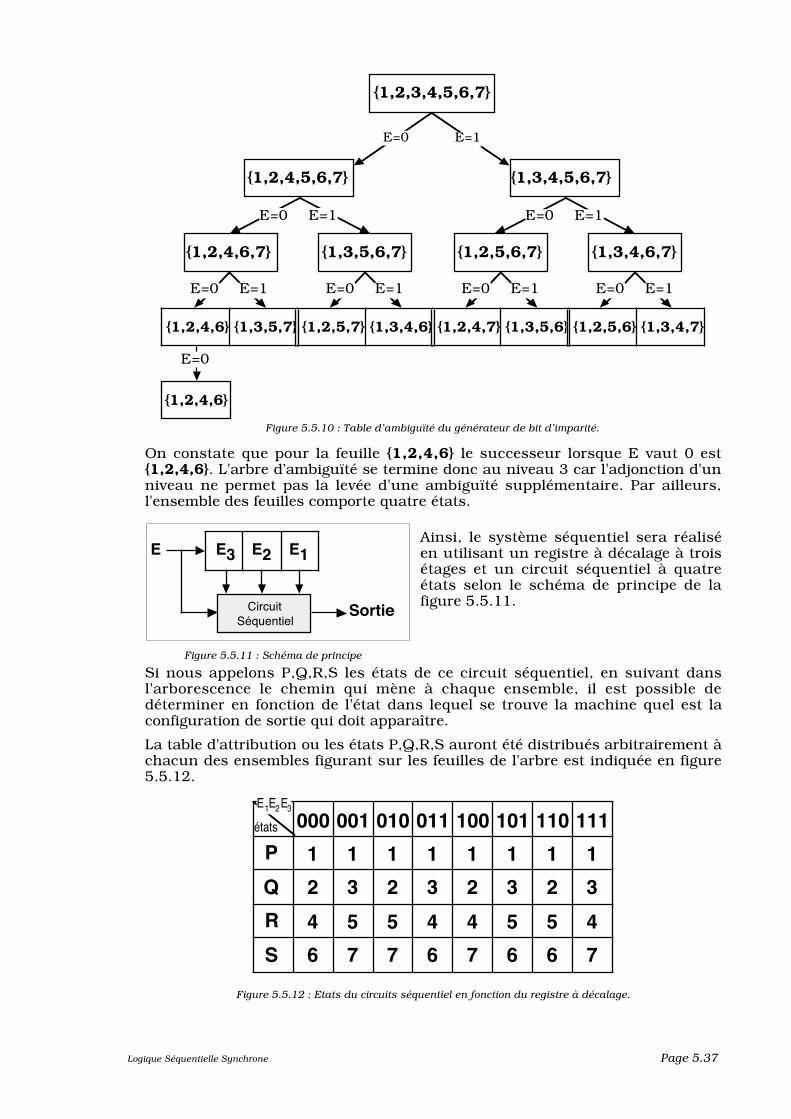
On constate que pour la feuille {1,2,4,6} le successeur lorsque E vaut 0 est{1,2,4,6}. L'arbre dÕambigu�t� se termine donc au niveau 3 car l'adjonction d'unniveau ne permet pas la lev�e d'une ambigu�t� suppl�mentaire. Par ailleurs,l'ensemble des feuilles comporte quatre �tats.
E3 E2 E1E
SortieCircuitS�quentiel
Figure 5.5.11 : Sch�ma de principe
Ainsi, le syst�me s�quentiel sera r�alis�en utilisant un registre � d�calage � trois�tages et un circuit s�quentiel � quatre�tats selon le sch�ma de principe de lafigure 5.5.11.
Si nous appelons P,Q,R,S les �tats de ce circuit s�quentiel, en suivant dansl'arborescence le chemin qui m�ne � chaque ensemble, il est possible ded�terminer en fonction de l'�tat dans lequel se trouve la machine quel est laconfiguration de sortie qui doit appara�tre.
La table d'attribution ou les �tats P,Q,R,S auront �t� distribu�s arbitrairement �chacun des ensembles figurant sur les feuilles de l'arbre est indiqu�e en figure5.5.12.
P
Q
R
S
000
1
2
4
6
001
1
3
5
7
010
1
2
5
7
011
1
3
4
6
100
1
2
4
7
101
1
3
5
6
110
1
2
5
6
111
1
3
4
7
E1E2E3
�tats
Figure 5.5.12 : Etats du circuits s�quentiel en fonction du registre � d�calage.

Page 5.38 Jacques Guizol & Christian Aperghis
Les tableaux des figures 5.5.9 et 5.5.12 permettent de d�terminer lefonctionnement de la machine s�quentielle M1 (figure 5.5.13) dont les �tats P, Q,R et S d�pendent des �tats du registre � d�calage et de lÕentr�e.
P
Q
R
S
000
Q
R
S
P
001
Q
R
S
P
010
Q
R
S
P
011
Q
R
S
P
100
Q
R
S
P
101
Q
R
S
P
110
Q
R
S
P
111
Q
R
S
P
Etat suivantE=0 E=1
000
Q
R
S
P
001
Q
R
S
P
010
Q
R
S
P
011
Q
R
S
P
100
Q
R
S
P
101
Q
R
S
P
110
Q
R
S
P
111
Q
R
S
P
E.P
Figure 5.5.13 : Table des phases du circuit ayant pour �tats P, Q, R et S.
La construction de ce tableau ob�it aux r�gles d�j� expos�es pour lad�composition fonctionnelle au moyen des PPS. Soit � d�terminer le successeurde lÕ�tat P dans le cas ou le registre � d�calage contient la valeur 000 et quelÕentr�e prend la valeur 1.
� Si M1, le registre � d�calage contient la valeur 000 et que la machineM2 est dans lÕ�tat P, cela signifie que lÕ�tat �quivalent de la machine Mcorrespond � lÕintersection des classes 000 et P, soit, en fonction dutableau de la figure 5.5.12, lÕ�tat 1.
� On voit sur le tableau des phases de la figure 5.5.9 que le successeurde lÕ�tat 1 lorsque lÕentr�e prend la valeur 1 est lÕ�tat 3.
� Par ailleurs, le registre contient la valeur 000 et lÕentr�e qui sepr�sente est � la valeur 1, au temps suivant cette valeur de lÕentr�esera prise en compte et le registre contiendra la valeur E3E2E1= 100.
� La machine M2 doit donc dans ces conditions passer dans un �tat Xtel que X Ç 001 = 3, soit X = Q. (E1E2E3= 001).
Ces op�rations sont � renouveler pour chacune des cases de la matricerepr�sentative de la machine M2.
Dans ce cas particulier, on constate que toutes les colonnes sont identiques. Lecircuit s�quentiel obtenu M2, ne d�pend donc pas des diverses entr�es (sauf delÕhorloge). Un tel circuit est qualifi� de circuit s�quentiel autonome. Ici, il ser�sume en fait � un compteur modulo 4 dont le tableau des phases est repr�-sent� en figure 5.5.14.
EtatPr�sent
EtatSuivant
PQRS
QRSP
Figure 5.5.14 : Tableau des phases dÕun compteur modulo 4
Le g�n�rateur de bit de parit� se compose finalement d'un compteur moduloquatre associ� � un registre � d�calage et d'un circuit combinatoire. DÕo� lesch�ma de la figure 5.5.15.

Logique S�quentielle Synchrone Page 5.39
E3 E2 E1E
SortieCircuit
Combinatoire
Horloge
M1 : Registre � D�calage
M2 : Compteur modulo 4
M
Figure 5.5.15 : Sch�ma de principe du g�n�rateur de parit�
La r�alisation de la machine M2 et la synth�se de la sortie ne pr�sentent aucunedifficult� majeure.
Affectation des variables auxiliaires :
âÊPÊ®ÊAÊ=Ê0,ÊBÊ=0
âÊQÊ®ÊAÊ=Ê0,ÊBÊ=Ê1
âÊRÊ®ÊAÊ=Ê1,ÊBÊ=Ê1
âÊSÊ®ÊAÊ=Ê1,ÊBÊ=Ê0
EtatPr�sent
EtatSuivant
0 00 11 11 0
01111000
A B A B
Figure 5.5.16 : Matrice des phases cod�e de la machine M2
D�termination de lÕ�tat de la sortie (figure 5.5.17) en fonction des sorties (E1 E2E3) de la machine M1, le registre � d�calage, des variables dÕ�tat de la machineM2 (A et B) et de lÕentr�e de donn�es (E).
E1E2E3
E A B S1 S2
000001010011100101110111
0000001000000001
0000000100000010
0000000100000010
0000001000000001
0000000100000010
0000001000000001
0000001000000001
0000000100000010
000 001 010 011 100 101 110 111S1 S2 S1 S2 S1 S2 S1 S2 S1 S2 S1 S2 S1 S2
Figure 5.5.17 : Matrice des sorties de la machine compl�te.

Page 5.40 Jacques Guizol & Christian Aperghis
5.5.2. D�composition avec une machine impos�e.
Il existe une autre possibilit� de d�composition d'un circuit s�quentiel,consistant � utiliser un circuit existant, d�fini par son tableau des phases.
Soit � r�aliser la machine M d�finie par le tableau des phases de la figure5.5.18a en utilisant la machine M1 d�finie par le tableau des phases de lafigure 5.5.18b.
E = 0 E = 1Etat
Pr�sentEtat Suivant Sortie
E = 0 E = 1
123456
235245
634311
000000
010101
EtatPr�sent
Etat Suivant
E = 0 E = 1
JKL
KLK
LJJ
Figure 5.5.18 : a) Matrice des phases de M ; b) Matrice des phases de M1
Le premier probl�me est bien �videmment de d�terminer si une telle r�alisationest possible, cÕest � dire si lÕon peut mettre en �vidence pour les deux machinesdes cycles compatibles. La proc�dure � suivre pour parvenir � cetted�termination est la suivante.
On suppose qu'� un instant donn�, les deux machines se trouvent dans un �tatarbitrairement d�sign� comme initial. Dans le cas qui nous int�resse nouschoisissons les �tats 1 pour la machine M et J pour la machine M1. Cette�quivalence d'�tats sera not�e 1-J.
Dans ces conditions, pour E = 0 la machine M passe dans l'�tat 2 alors que lamachine M1 passe dans l'�tat K, soit l'�quivalence 2-K.
De m�me, pour E = 1 l'�quivalence telle quenous venons de la d�finir sera 6-L.
Nous aurons ainsi obtenu une premi�re lignedu tableau que nous d�sirons construire(figure 5.5.19)
EtatPr�sent
Etat Suivant
E = 0 E = 1
1-J2-K
2-K3-L
6-L3-J
Figure 5.5.19 : Premi�res �quivalences
Les deux �quivalences que nous venons de faire appara�tre vont permettre depoursuivre la construction du tableau, c'est � dire de d�terminer lessuccesseurs de 2-K et de 6-L pour E = 0 et E = 1 (figure 5.5.20).
EtatPr�sent
Etat Suivant
E = 0 E = 1
1-J2-K6-L3-L
2-K3-L5-K5-K
6-L3-J1-J4-J
Figure 5.5.20 : Poursuite de l'extraction des �quivalences.
Les quatre nouvelles �quivalences qui viennent dÕappara�tre doivent � leur tour�tre �tudi�es et ainsi de suite jusquÕ� exploration compl�te de toutes les�quivalences qui auront �t� mises en �vidence. Au bout du compte, nousobtenons le tableau de la figure 5.5.21.

Logique S�quentielle Synchrone Page 5.41
EtatPr�sent
Etat Suivant
E = 0 E = 1
1-J2-K6-L3-L3-J5-K4-J4-L
2-K3-L5-K5-K5-K4-L2-K2-K
6-L3-J1-J4-J4-L1-J3-L3-J
Figure 5.5.21 : Table compl�te des �quivalences.
Cette table nous permet de constater que l'�tat J est associ� au bloc [1,3,4], quel'�tat K est associ� au bloc [2,5] et que l'�tat L est associ� au bloc [3,4,6].
En d�finitive, si 1 est l'�tat initial de la machine M et que J est l'�tat initial de lamachine M1, en envoyant la m�me s�quence de symboles sur les entr�es de M etde M1, il sera possible en observant l'�tat de M de d�duire l'�tat de M1, etinversement en observant l'�tat de M1 de d�terminer dans quel bloc se trouve lamachine M.
â Si M1 se trouve dans l'�tat J, M se trouve dans l'un des �tats 1, 3 ou 4.â Si M1 se trouve dans l'�tat K, M se trouve dans l'un des �tats 2 ou 5.â Si M1 se trouve dans l'�tat L M se trouve dans l'un des �tats 3, 4 ou 6.
Le r�le de la machine M2, qui reste � construire, sera de lever lÕambigu�t� et,comme chacun des blocs comporte un maximum de trois �tats, le nombred'�tats de M2 sera �gal � trois. Appelons les P, Q, R.
L'attribution de P, Q, R aux �tats des diff�rents blocs est parfaitement arbitraire,toutefois, on obtiendra un r�sultat optimal en attribuant, autant que possible,un m�me �tat de M2 � un �tat donn� de M (figure 5.5.21).
.
134
�tat M1
�tat MJ
1,3,4K
2,5L
3,4,6
PQR
-25
634
�tat
M2
Figure 5.5.21 : Correspondance entre les �tat de M et ceux de M1 et M2
M�me si la r�gle qui vient dÕ�tre �nonc�e ne peut �tre respect�e, il est �videntque le choix d'un �tat parmi J, K, L et d'un �tat pris parmi P, Q, R d�finit sansaucune ambigu�t� un �tat et un seul de M. Ce qui revient � dire que la mise encascade de la machine M1 impos�e et de la machine M2 � r�aliser doit avoir uncomportement identique � celui de la machine d'origine M. Les deux machinesM1 et M2 seront cascad�es selon un sch�ma classique que l'on a donn� enpr�c�demment (figure 5.4.1)
LÕalgorithme de construction du tableau des phases de la machine M2 a d�j� �t��voqu�. Si, par exemple, nous cherchons lÕ�tat suivant de Q pour une entr�e Ede valeur 0 alors que M1 est dans un �tat L, on d�termine lÕ�tat pr�c�dent de lamachine M sur la table de la figure 5.5.21, au croisement de la ligne Q et de la

Page 5.42 Jacques Guizol & Christian Aperghis
colonne L, soit lÕ�tat 3. la table de la figure 5.5.18a permet dÕobtenir lesuccesseur de 3 pour une entr�e E=0, soit lÕ�tat 5. On revient alors sur la table5.5.21 o� lÕon trouve cet �tat 5 sur la ligne corresponadant � lÕ�tat R de M2.LÕ�tat suivant que lÕon recherchait pour M2 est donc R. En proc�dant ainsi pourchaque configuration, on obtient le r�sultat indiqu� en figure 5.5.22.
JQRQ
PQR
K-QR
LQRQ
JPRQ
K-QP
LPRQ
Etat SuivantE = 0 E = 1Etat
Pr�sent
Figure 5.5.22 : Matrice des phases de la machine M2
5.5.3. D�composition fonctionnelle dans le cas g�n�ral.
Les syst�mes s�quentiels pour lesquels une d�composition en PPS est possiblesont peu nombreux car les conditions � remplir sont tr�s strictes et de ce faitrarement pr�sentes. Il est cependant possible de proc�der � une d�compositionfonctionnelle, y compris en lÕabsence de PPS, en ayant recours � l'utilisationd'un crit�re beaucoup moins restrictif que nous appellerons couverture avecpropri�t� de substitution, soit en abr�g� CPS.
DDDD����ffff iiiinnnniiii tttt iiiioooonnnn 1 : Soit un ensemble form� par les �tats d'un syst�me s�quentiel, tout ensemble C form�
par des sous ensembles de l'ensemble pr�c�dent tel que chaque �tat du syst�me
s�quentiel figure au moins une fois dans un des sous ensembles, est une ccccoooouuuuvvvveeeerrrr ttttuuuurrrreeee
dddduuuu ssssyyyysssstttt����mmmmeeee ssss����qqqquuuueeeennnnttttiiiieeeellll....
Soit un syst�me s�quentiel � six �tats (1,2,3,4,5,6).
L'ensemble C = [(1,3);(2,4,5);(4,6)] est une couverture et, par analogie avec lesPPS, nous appellerons bloc chaque �l�ment de C en le repr�sentant entreparenth�ses pour le diff�rencier des partitions.
DDDD����ffff iiiinnnniiii tttt iiiioooonnnn 2 : Si pour une couverture, chaque paire d'�tats pris � l'int�rieur d'un m�me bloc, a comme
successeur, pour chacune des combinaisons d'entr�e, des paires dÕ�tats situ�s tous les
deux � l'int�rieur d'un m�me bloc, on dit que la couverture est une ccccoooouuuuvvvveeeerrrrttttuuuurrrreeee aaaavvvveeeecccc
pppprrrroooopppprrrriiii����tttt���� ddddeeee ssssuuuubbbbssssttttiiiittttuuuuttttiiiioooonnnn, ou en abr�g� CPS.
L'existence d'une CPS entra�ne naturellement l'existence d'une d�compositionen cascade, compos�e de :
� un sous-syst�me M1 dont l'�tat ne d�pend que des variables d'entr�eset ayant autant d'�tats que ce qu'il y a de blocs ;
� un sous-syst�me M2 ayant un nombre d'�tats �gal au nombre d'�tatsdu bloc en poss�dant le plus grand nombre.
DDDD����ffff iiiinnnniiii tttt iiiioooonnnn 3 : Toute couverture pour laquelle aucun bloc n'est un sous ensemble d'un autre bloc est
une ccccoooouuuuvvvveeeerrrrttttuuuurrrreeee rrrr����dddduuuuiiiitttteeee.
Il est important de noter que bien que les couvertures r�duites ne conduisentpas n�cessairement � la r�alisation la plus �conomique, leur nombre est tel qu'ilest impossible de les utiliser de mani�re raisonnable. Dans tout ce qui suit,nous ne parlerons que de couverture r�duite et toute mention du termecouverture devra, de ce fait, �tre interpr�t�e comme couverture r�duite.
5555....5555....3333....1111.... RRRReeeecccchhhheeeerrrrcccchhhheeee dddd''''uuuunnnneeee CCCCPPPPSSSS....
Il est ais� de rechercher les CPS ; tout syst�me s�quentiel en poss�de un grandnombre. Le probl�me est plut�t li� � la d�termination des CPS pr�sentant unint�r�t, celles comportant un nombre de blocs aussi r�duit que possible.

Logique S�quentielle Synchrone Page 5.43
Tout syst�me s�quentiel � n �tats poss�de deux CPS triviales (celle qui comporteun bloc de n �tats et celle qui comporte n blocs de 1 �tat) et au moins n-2 CPSnon triviales, car pour tout m (1 < m < n), lÕensemble form� par tous les blocs dem �tats est une CPS (�ventuellement non r�duite).
Ceci est �vident si on consid�re que les successeurs de m �tats d'un bloc sontau plus au nombre de m et forment par cons�quent n�cessairement l'un desblocs de la couverture (figure 5.5.23).
m Etats
E = 0
m Etats
m Etats
E = 1
Figure 5.5.23 : Egalit� de la cardinalit� des �tats dans les transitions.
Ce type de couverture que l'on appelle couverture universelle ne pr�sentequ'un int�r�t r�duit. En pratique, c'est par essais successifs que l'on rechercheles CPS. Reprenons, par exemple, le tableau des phases de la figure 5.5.18a afind'expliquer le principe de cette recherche.
Si on tente de former le bloc (1,2), on d�termine de fait les blocs (2,3) et (3,6),(2,3) conduit de son cot� � (3,5) et (3,4) alors que (3,6) donne (1,4). En fin decompte nous aboutissons � la couverture :
[ (1 ,2);(2 ,3);(3 ,6);(3 ,5);(3 ,4);(1 ,4);(4 ,5);(2 ,5);(2 ,4);(1 ,3);(4 ,6)] Ê
Au niveau de la r�alisation, cela nous conduit � un premier sous-syst�me M1 �onze �tats et un second sous-syst�me M2 � deux �tats.
Prenons comme d�part le bloc (2,5) la couverture obtenue dans ces conditionsest : [(2,5);(3,4);(1,3);(4,6)] Soit en d�finitive une machine M1 � quatre �tats, etune machine M2 � deux �tats.
Le bloc (1,3,4) conduit � la couverture [(1,3,4);(2,5);(3,4,6)], celle qui avait �t�trouv�e apr�s constitution de la table 5.5.21.
5555....5555....3333....2222.... DDDD����ccccoooommmmppppoooossssiiiittttiiiioooonnnn eeeennnn ssss����rrrriiiieeee....
Pour une CPS donn�e, la d�composition en s�rie ne pose aucun probl�meparticulier. sur l'exemple que nous venons de voir avec la CPS [(2,5);(3,4);(1,3);(4,6)], en appelant les quatre blocs A, B, C, D selon la convention :
*ÊAÊ:Ê(2,5) *ÊBÊ:Ê(3,4) *ÊCÊ:Ê(1,3) *ÊDÊ:Ê(4,6)
La machine M1 serait d�crite par le tableau des phases de la figure 5.5.24a. Lamachine M2 est une machine � deux �tats P et Q, pour lequel nous d�finirons letableau de correspondance de la figure 5.5.24b.

Page 5.44 Jacques Guizol & Christian Aperghis
EtatPr�sent
Etat Suivant
E = 0 E = 1
ABCD
BAAA
CBDC
A
2
5
B
4
3
C
1
3
D
4
6P
Q
Figure 5.5.24 : a) Table des phases de M1 ; b) Table de correspondance de M2.
Des deux tables pr�c�dentes nous d�duisons le tableau des phases de lamachine M2 d�crit en figure 5.5.25.
AQP
PQ
BPQ
CPQ
DPQ
AQP
Etat SuivantE = 0Etat
Pr�sentBQP
CQP
DQP
E = 1
Figure 5.5.25 : Matrice des phases de la machine M2
Ce tableau se construit comme tous ceux que nous avons rencontr�s lors de lar�alisation de machines cascad�es. Soit � d�terminer lÕ�tat suivant de P pourune valeur de lÕentr�e prenant la valeur 0, la machine M1 �tant dans lÕ�tat A.
� Le tableau de la figure 5.5.24b nous dit que lorsque la machine M1 estdans lÕ�tat A et la machine M2 dans lÕ�tat P, lÕ�tat �quivalent pour lamachine M est lÕ�tat 2.
� On voit sur le tableau des phases de la machine M, que le successeurde lÕ�tat 2 lorsque lÕentr�e prend la valeur 0 est lÕ�tat 3.
� Par ailleurs, pour la machine M1 le successeur de lÕ�tat A lorsquelÕentr�e prend la valeur 0 est lÕ�tat B.
� La machine M2 doit donc dans ces conditions passer dans un �tat Xtel que X Ç B = 3 soit X = Q.
Ces op�rations sont bien entendu � renouveler pour chacune des cases de lamatrice repr�sentative de la machine M2.
5555....5555....3333....3333.... DDDD����ccccoooommmmppppoooossssiiiittttiiiioooonnnn eeeennnn ppppaaaarrrraaaallllllll����lllleeee....
Nous avons d�j� vu, lors de l'�tude des PPS, que chaque fois qu'il �tait possiblede mettre en �vidence deux PPS orthogonales, la machine pouvait se r�aliser enmettant en parall�le deux syst�mes ind�pendants.
Un r�sultat identique est applicable aux CPS, car si le produit de deux CPSdonne la CPS z�ro, (celle qui comporte N blocs de un �tat chacun), alors lad�termination de deux blocs, l'un pour la machine M1, l'autre pour la machineM2, permet dÕisoler sans ambigu�t� un �tat et un seul de la machine M.
Soit une machine M d�finie par son tableau des phases (figure 5.5.26).

Logique S�quentielle Synchrone Page 5.45
EtatPr�sent
Etat Suivant
E = 0 E = 1
123456
232565
143634
Figure 5.5.26 : Matrice des phases de M.
Sur cette matrice, il est possible de mettre en �vidence les CPS suivantes :
Ê
C1Ê=Ê [ (1,3,4);(2,5);(1,3,6)]
C2Ê=Ê [ (1);(3,5);(2,4,6)]
C3Ê=Ê [ (1,3);(2,6);(3,5);(4,6)]
C4Ê=Ê [ (1);(2,5);(3,6);(3,4)]
Ê
On constate que les CPS C1 et C2 , d'une part, C3 et C4 , d'autre part, sontorthogonales.
Ainsi donc en consid�rant sur C3 et C4 les affectations suivantes :
+ÊC3
îïïíïïì
Ê
PÊ®Ê(1,3)
ÊQÊ®Ê(2,6)
ÊRÊ®Ê(3,5Ê)
SÊ®Ê(4,6)+Ê
C4
îïïíïïì
Ê
AÊ®Ê(1)
BÊ®Ê(2,5)
CÊ®Ê(3,6)
DÊ®Ê(3,4)
On obtient pour les machines M1 et M2 les tableaux des phases de la figure5.5.27.
EtatPr�sent
Etat Suivant
E = 0 E = 1
PQRS
QRQR
PSPS
EtatPr�sent
Etat Suivant
E = 0 E = 1
ABCD
BCBB
ADDC
Machine M2Machine M1
Figure 5.5.27 :Matrices des phases des machines M1 et M2.
Ce qui correspond � deux machines en parall�le selon le sch�ma que nous
avons d�j� d�crit sur la figure 5.4.9.
Le circuit combinatoire CC fournit, en fonction de l'�tat simultan� de M1 et M2,le signal de sortie de la machine M.

Page 5.46 Jacques Guizol & Christian Aperghis
5555....5555....3333....4444.... LLLLeeeessss mmmmaaaacccchhhhiiiinnnneeeessss PPPPeeeerrrrmmmmuuuuttttaaaattttiiiioooonnnn ---- RRRReeeesssseeeetttt....
DDDD����ffffiiiinnnniiiittttiiiioooonnnnssss : Une machine est une mmmmaaaacccchhhhiiiinnnneeee ppppeeeerrrrmmmmuuuuttttaaaattttiiiioooonnnn ---- rrrreeeesssseeeetttt si et seulement si les colonnes
de son tableau des phases sont soit des colonnes permutations soit des colonnes reset.
Une colonne d'un tableau des phases est une ccccoooolllloooonnnnnnnneeee ppppeeeerrrrmmmmuuuuttttaaaattttiiiioooonnnn si cette colonne
contient tous les �tats de la machine.
Une colonne d'un tableau des phases est une ccccoooolllloooonnnnnnnneeee rrrreeeesssseeeetttt si toutes les lignes de
cette colonne contiennent le m�me �tat.
Par exemple v�rifions si la machine d�crite par le tableau des phases de la figure5.5.28 est une machine permutation - reset.
E = 11 E = 10Etat
Pr�sent
Etat Suivant
E = 00 E = 01
123456
235416
365412
222222
135342
Figure 5.5.28 : Matrice des phases dÕune machine Permutation-Reset.
â La colonne E = 00 est une colonne permutation.â La colonne E = 01 est une colonne permutation.â La colonne E = 11 est une colonne reset.â La colonne E = 10 nÕest ni une colonne permutation ni une colonne reset.
Cette machine n'est donc pas une machine permutation - reset.
Les machines permutation - reset (que l'on d�signera maintenant sous le nomde machine P-R) jouent un r�le important dans la r�alisation des syst�mess�quentiels. On montre que tout syst�me peut �tre r�alis� en mettant en s�rieun nombre fini de machines P-R. Si ce type de machines joue de fait un r�lecanonique dans la logique s�quentielle, elles nÕont dÕint�r�t que sur un planpurement th�orique car la r�alisation dÕun syst�me donn� � partir de machinesP-R conduit rarement � un r�sultat satisfaisant du point de vue �conomique.
D�montrons que toute machine s�quentielle peut �tre d�compos�e en unecascade de machine P-R. Pour cela, nous allons mettre en �vidence les pointssuivants :
� Toute machine � 2 �tats est une machine P-R.
� Toute machine � n �tats peut �tre d�compos�e en une machine P-R ens�rie avec une machine ayant au plus n-1 �tats
La premi�re assertion est �vidente, les deux colonnes du tableau des phasesd'une telle machine ne peuvent contenir que deux �tats diff�rents (colonnepermutation) ou deux �tats identiques (colonne reset).
Pour montrer la seconde assertion, nous allons supposer qu'une machine MnÕest pas une machine P-R. Cette machine poss�de au moins une colonne quin'est ni une colonne permutation ni une colonne reset (si plusieurs colonnesr�pondent � cette d�finition, on travaillera sur celle qui poss�de le plus grandnombre d'�tats diff�rents). Soit P le nombre d'�tats distincts de cette colonne, ona P £ n-1 sinon la colonne serait une colonne permutation.

Logique S�quentielle Synchrone Page 5.47
Si nous consid�rons la CPS form�e par tous les blocs ayant P �tats de tellemani�re que les P �tats distincts de la colonne qui nÕest pas une colonnepermutation figurent dans l'un des blocs. Une telle couverture permet ded�composer la machine M en une sous machine M1 mise en s�rie avec une sousmachine M2. Il reste maintenant � prouver que M1 est bien une machine P-R.
Une colonne permutation de M faisant correspondre � deux blocs distincts de P�tats deux autre blocs distincts de P �tats, la colonne qui dans M1 est l'imaged'une colonne permutation de M, fait correspondre � deux �tats distincts de M1deux autres �tats distincts de M1 et forme par cons�quent une colonnepermutation. Une colonne qui n'est pas une colonne permutation de M faitcorrespondre � tous les blocs de P �tats le bloc comportant les P �tats distinctsde cette colonne (cÕest vrai pour la colonne comportant le plus grand nombre d'�tats distincts,et � fortiori pour toute colonne ayant Q �tats distincts avec QÊ£ÊP).
La colonne correspondante de M1 est ainsi une colonne reset. Une CPScorrectement d�termin�e conduisant soit � une colonne permutation soit � unecolonne reset, on peut affirmer que la machine M1 est une machine P-R.
Dans ces conditions, la machine M2 aura P �tats, c'est � dire autant d'�tats qu'ily a d'�l�ments dans chaque bloc. Mais comme P £ n-1, la machine M2 aura auplus n-1 �tats. Ainsi, si M2 n'est pas une machine P-R il suffira de r�p�terl'algorithme qui, dans le cas le plus d�favorable, sera appliqu� n-2 fois ce quiconduira � une cascade de n-1 machines.
Soit la machine d�crite par le tableau des phases de la figure 5.5.29.
EtatPr�sent
Etat Suivant
E = 0 E = 1
12345
23451
12421
Figure 5.5.29 : Matrice des phases.
On constate imm�diatement que la colonne E =0 est une colonne permutation, alors que lacolonne E = 1 n'est ni une colonne permutation,ni une colonne reset.
La colonne E = 1 comportant trois �tatsdistincts, on cherche une couverture form�e deblocs de trois �tats incluant les trois �tats quiapparaissent dans la colonne en question soit lebloc (1,2,3).
On arrive � :[(1,2,4);(2,3,5);(1,3,4);(2,4,5);(1,3,5)]
Les blocs peuvent �tre r�f�renc�s :
ÊPÊÐ>Ê(1,2,4) QÊÐ>Ê(2,3,5) RÊÐ>Ê(1,3,4) SÊÐ>Ê(2,4,5) TÊÐ>Ê(1,3,5)
Ce qui permet de d�terminer pour la machine M1 le tableau des phases de lafigure 5.5.30.
EtatPr�sent
Etat Suivant
E = 0 E = 1
PQRST
QRSTP
PPPPP
Figure 5.5.30 : Matrice des phases de M1.
Cette machine M1 est une machine P-R. La colonne pour E=0 est une colonnepermutation, lÕautre est une colonne reset.

Page 5.48 Jacques Guizol & Christian Aperghis
La machine MA comportera trois �tats, que nous pouvons affecter selon letableau de la figure 5.5.31.
P124
Q235
R134
S245
ABC
T135
Figure 5.5.31 : Table de correspondance de M2.
Pour obtenir toujours selon lÕalgorithme de d�finition des machines cascad�es letableau des phases de la figure 5.5.32. Les entr�es de cette machine sont :
� LÕentr�e g�n�rale E du circuit ;
� Les sorties P, Q, R, S et T de la machine M1.
PABC
ABC
QBCA
RABC
Etat SuivantE = 0Etat
Pr�sentE = 1
SBCA
TBCA
PABB
QBCA
RACB
SBBA
TACA
Figure 5.5.32 : Table des phases de la machine MA
Cette machine MA n'�tant toujours pas une machine P-R, (colonnes P,S et Tpour E = 1), lÕalgorithme sera appliqu� une nouvelle fois pour cr�er une machineP-R (M2) et une machine cascad�e MB.
Une nouvelle couverture [(A,B);(B,C);(A,C)] va nous permettre de cr�er lamachine M2 (figure 5.5.33)
P(A,B)(B,C)(A,C)
(A,B)(B,C)(A,C)
Q(B,C)(A,C)(A,B)
R(A,B)(B,C)(A,C)
Etat SuivantE = 0Etat
Pr�sentE = 1
S(B,C)(A,C)(A,B)
T(B,C)(A,C)(A,B)
P(A,B)(A,B)(A,B)
Q(B,C)(A,C)(A,B)
R(A,C)(B,C)(A,B)
S(A,B)(A,B)(A,B)
T(A,C)(A,C)(A,C)
Les colo nnes qui n '� ta ient ni permuta tio nni reset sont devenues col onn es reset
Les co lon nes-permuta tio nle sont res t�es.
Figure 5.5.33 : Table pr�c�dente transform�e par la CPS.
Remarquons au passage que pour une machine comportant trois �tats, cÕest laseule couverture pr�serv�e possible.
Si nous appelons a,b,g les trois blocs de la couverture [(A,B);(B,C);(A,C)], selonla convention suivante :
ÊÊ
Ê*ÊÊaÊÐ>Ê(A,B)*ÊÊbÊÐ>Ê(B,C)*ÊÊgÊÐ>Ê(A,C)Ê
ÊÊ

Logique S�quentielle Synchrone Page 5.49
Nous pouvons repr�senter le tableau des phases de la machine M2 (figure5.5.34)
Pabg
abg
Qbga
Rabg
Etat SuivantE = 0Etat
Pr�sentE = 1
Sbga
Tbga
Paaa
Qbga
Rgba
Saaa
Tggg
Figure 5.5.34 : Matrice des phases de la machine M2.
Cette machine M2 est une machine P-R. De plus, chaque bloc ne comportantque deux �tats, la machine M3 qui reste � construire et qui sera cascad�e avecla machine M2 sera une machine � deux �tats m et n (figure 5.5.35) doncn�cessairement une machine P-R.
a
AB
b
BC
g
AC
m
n
Figure 5.5.35 : Matrice des phases deM3.
Cette machine M3 qui comportera trois groupesdÕentr�es :
� LÕentr�e g�n�rale E du circuit.
� Les sorties P, Q, R, S et T de la machine M1
� Les sorties a, b et g de la machine M2
La matrice des phases de cette machine (figure 5.5.36) sera construite � partir :
¬ Du diagramme des phases de la machine MA (figure 5.5.32)
Du diagramme des phases de la machine M2 (figure 5.5.34)
 De la table de dÕaffectation des �tats de la machine M3 (figure 5.5.35)
a b g
m m m
n n n
a b g
m n n
n m m
a b g
m m m
n n n
a b g
m n n
n m m
a b g
m n n
n m m
a b g
m m m
n m n
a b g
m n n
n m m
a b g
m n m
n m n
a b g
n n n
n m m
a b g
m n m
n m m
P Q R S T P Q R S T
Etat SuivantE = 0 E = 1
m
n
EtatPr�sent
Figure 5.5.35 : Matrice des phases de la machine M3.
En fin de compte, la machine M a �t� d�compos�e en trois machines P-R. Unemachine M1 � cinq �tats, une machine M2 � trois �tats et une machine M3 �deux �tats. Selon le sch�ma de la figure 5.5.36
B
Machine 1 Machine 2
B B
Horloge
Entr�e
SortieMachine 3
Figure 5.5.36 : Sch�ma de principe de la machine obtenue;