$ 1 È / ,6( 0 2 ' $ / $ 3$ 5 7 ,5 ' ( 8 0 $ 7 e & 1...
TRANSCRIPT
ANÁLISE MODAL A PARTIR DE UMA TÉCNICA DE
DECOMPOSIÇÃO NO DOMÍNIO DO TEMPO
Nelson de Alcantara Cruz Junior
Projeto de Graduação apresentado ao Curso de Engenharia Mecânica da Escola Politécnica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Engenheiro
Orientador: Daniel Alves Castello
Rio de Janeiro
Agosto/2017
ANÁLISE MODAL A PARTIR DE UMA TÉCNICA DE DECOMPOSIÇÃO NO
DOMÍNIO DO TEMPO
Nelson de Alcantara Cruz Junior
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO DE
ENGENHARIA MECÂNICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS
PARA A OBTENÇÃO DO GRAU DE ENGENHEIRO MECÂNICO.
Examinada por:
________________________________________________
Prof.° Daniel Alves Castello, DSc.
________________________________________________
Prof.° Fernando Augusto de Noronha Castro Pinto, Dr. Ing.
________________________________________________
Prof.° Thiago Gamboa Ritto, DSc.
RIO DE JANEIRO - RJ, BRASIL
AGOSTO/2017

de Alcantara Cruz Junior, Nelson Análise modal a partir de uma técnica de decomposição
no domínio do tempo / Nelson de Alcantara Cruz Junior - Rio de Janeiro: UFRJ/ ESCOLA POLITÉCNICA, 2017
XII, 50p.: il.; 29,7 cm Orientador: Daniel Alves Castello Projeto de Graduação - UFRJ/ Escola Politécnica/
Curso de Engenharia Mecânica, 2017 Referências Bibliográficas: p.50 1. Decomposição em Domínio Temporal 2.Estimação
de parâmetros modais 3. Monitoração da Integridade Estrutural I. Alves Castello, Daniel II. Universidade Federal do Rio de Janeiro, Escola Politécnica, Curso de Engenharia Mecânica III. Análise modal partir de uma técnica de decomposição no domínio do tempo.
iii
Agradecimentos
Gostaria de agradecer ao meu professor orientador, Daniel, que me ajudou a realizar o
trabalho desse estudo, através de reuniões periódicas, e pela oportunidade de aprender sobre o assunto desse projeto. Além é claro, de me ensinar 2 disciplinas durante a graduação.
Agradeço ao meu amigo Gabriel Silva, que estava presente nas minhas reuniões com o
meu professor orientador e também proporcionou ótimo suporte em relação ao projeto e para a escrita deste relatório.
Gostaria de agradecer à professora Anna Carla pelo suporte no meu intercâmbio que
certamente foi essencial para que eu fizesse bem este projeto e para que eu crescesse como profissional.
Reconhecimento também à todos os demais professores do Departamento de Engenharia Mecânica da UFRJ que contribuíram no meu aprendizado como engenheiro mecânico.
Por fim, gostaria de agradecer à minha família por todo o suporte durante a graduação
e durante este projeto.
iv
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte dos
requisitos necessários para a obtenção do grau de Engenheiro Mecânico
ANÁLISE MODAL A PARTIR DE UMA TÉCNICA DE DECOMPOSIÇÃO NO
DOMÍNIO DO TEMPO
Nelson de Alcantara Cruz Junior
Agosto/2017
Orientador: Daniel Alves Castello
Curso: Engenharia Mecânica
Os métodos de Monitoração da Integridade Estrutural permitem fazer diagnósticos da saúde de uma estrutura. Alguns destes métodos são baseados tanto em dados de medição quanto em modelos computacionais. Com relação aos dados de medição, destaca-se o grande interesse em dados modais. Este trabalho tem o objetivo de estudar a técnica da Decomposição em Domínio Temporal que pode ser utilizada para a estimação desses parâmetros.
Na primeira parte deste projeto é explicada a teoria desta técnica. Essa seção disserta sobre as hipóteses e os cálculos necessários para fazer a estimação dos parâmetros modais. Nas seções seguintes são explicados os algoritmos necessários para a implementação da técnica assim como o resultado gerado. Durante a explicação dos resultados, o estudo é feito para diversas configurações a fim de testar a abrangência da técnica de Decomposição em Domínio Temporal.
A conclusão foi de que a técnica funciona satisfatoriamente quando são utilizados dados sintéticos e experimentais obtidos a partir de um modelo de viga.
Palavras-chave: Decomposição em Domínio Temporal, parâmetros modais, frequência natural, aceleração, ruído.
v

Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of the
requirements for the degree of Mechanical Engineer
ANALYSIS OF THE TIME DOMAIN DECOMPOSITION TECHNIQUE FOR THE
ESTIMATION OF MODAL PARAMETERS
Nelson de Alcantara Cruz Junior
August/2017
Advisor: Daniel Alves Castello
Course: Mechanical Engineering
The methods of System Health Monitoring allow to make diagnoses of the health of a structure. Some of these methods are based both on measured data and computational models. As for the measured data, it should be emphasized the great interest in modal data. The objective of this work is to analyze the Time Domain Decomposition (TDD) technique aimed at extracting modal parameters from time domain data.
In the first part of this project the theory of this technique is explained. This section discusses the hypotheses and calculations needed to provide the estimates of the modal parameters. In the following sections the algorithms required for the implementation of the technique as well as the results are explained. During the explanation of the results, the analyses are made for several configurations in order to test the coverage of the Time Domain Decomposition technique.
The conclusion was that the technique works satisfactorily when using synthetic data from a beam. Keywords: Time Domain Decomposition, modal parameters, natural frequency, acceleration, noise
vi

Lista de Figuras
1 Técnica do problemas inversos da metodologia de Monitoração daIntegridade Estrutural. Adaptado de [1] . . . . . . . . . . . . . . . . 2
2 EsquemaViga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 Flowchart . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134 Representação do modelo de viga com os graus de liberdade simulado
pelo Matlab/CALFEM . . . . . . . . . . . . . . . . . . . . . . . . . . 155 Desenho esquemático da posição de cada sensor sob a viga que está
dividida igualmente em 10 elementos . . . . . . . . . . . . . . . . . . 156 Primeiro modo natural de vibração teórico . . . . . . . . . . . . . . . 167 Segundo modo natural de vibração teórico . . . . . . . . . . . . . . . 168 Terceiro modo natural de vibração teórico . . . . . . . . . . . . . . . 179 Quarto modo natural de vibração teórico . . . . . . . . . . . . . . . . 1710 Quinto modo natural de vibração teórico . . . . . . . . . . . . . . . . 1711 PSD do sinal de aceleração do sensor 2 . . . . . . . . . . . . . . . . . 1812 PSD do sinal de aceleração do sensor 8 . . . . . . . . . . . . . . . . . 1813 Comparação entre frequências naturais analíticas e o PSD do sinal de
medição das acelerações (sensor 4) . . . . . . . . . . . . . . . . . . . . 1914 Convergência das frequências naturais para diferentes modos em função
do número de elementos da viga. . . . . . . . . . . . . . . . . . . . . 2015 Janela de configuração da ferramenta FDATools já parametrizada
para o terceiro modo. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2216 Resposta em frequência do filtro de cada método para o modo 1. . . . 2217 Resposta em frequência do filtro de cada método para o modo 2. . . . 2318 Resposta em frequência do filtro de cada método para o modo 3. . . . 2319 Resposta em frequência do filtro de cada método para o modo 4. . . . 2320 Resposta em frequência do filtro de cada método para o modo 5. . . . 2421 Ampliação da Figura 24. Sinal resposta da aceleração em função do
tempo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2522 Representação da excitação impulso exercida na viga . . . . . . . . . 2623 Exemplo de excitação ruído realizada na viga . . . . . . . . . . . . . 2724 Sinal de resposta da aceleração em função do tempo após a aplicação
do TDD para uma excitação impulso. . . . . . . . . . . . . . . . . . . 2825 Densidade Espectral de Potência do sinal refeito após TDD para os
sensores 2 e 5 (filtragem do terceiro modo) . . . . . . . . . . . . . . . 2926a Comparação entre o sinal original, o filtrado antes do TDD e o refeito
pelo TDD respectivo ao modo 4. Medição realizada pelo sensor 7. . . 29
vii

26b Aproximação da comparação entre o sinal original, o filtrado antes doTDD e o refeito pelo TDD respectivo ao modo 4. Medição realizadapelo sensor 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
27 Segundo modo de vibração com referência da viga sem excitação . . . 3628 Resposta da aceleração UGDL (modo 4) para filtros de diferentes
tamanhas de banda de passagem . . . . . . . . . . . . . . . . . . . . 3929 Power Spectrum Density (PSD) do sinal de aceleração do modo 1 para
as vigas sem amortecimento e com amortecimento . . . . . . . . . . . 4030 Power Spectrum Density (PSD) do sinal de aceleração do modo 3 para
as vigas sem amortecimento e com amortecimento . . . . . . . . . . . 4031 Power Spectrum Density (PSD) do sinal de aceleração do modo 5 para
as vigas sem amortecimento e com amortecimento . . . . . . . . . . . 4132 Representação esquemática do experimento realizado por Souza . . . 4433 Densidade Espectral de Potência do sinal de aceleração medido
experimentalmente após um impacto martelo. . . . . . . . . . . . . . 4634 Comparação entre as formas modais 1 e 2 obtidas pelo TDD e obtidas
pelo Modelo de Elementos Finitos. . . . . . . . . . . . . . . . . . . . 4735 Comparação entre as formas modais 3 e 4 obtidas pelo TDD e obtidas
pelo Modelo de Elementos Finitos. . . . . . . . . . . . . . . . . . . . 4736 Comparação entre as formas modais 5 e 6 obtidas pelo TDD e obtidas
pelo Modelo de Elementos Finitos. . . . . . . . . . . . . . . . . . . . 48
viii
Lista de Tabelas
1 Propriedades da Viga . . . . . . . . . . . . . . . . . . . . . . . . . . . 142 Frequências naturais de vibração teóricas para uma viga de 10 elementos 163 Frequências naturais de vibração teóricas para uma viga de 100 elementos 204 Intervalo de frequências de corte para o projeto do filtro passa-banda 215 Valores MAC das formas modais obtidas pelo TDD para um excitação
impulso no sensor 10. Medição feita com os dados de aceleração semalteração e com os dados poluídos. . . . . . . . . . . . . . . . . . . . 32
6 Frequências naturais encontrados com o sinal refeito após o métodoTDD para um excitação impulso no sensor 10. Medição feita com osdados de aceleração sem alteração e com os dados poluídos. . . . . . . 33
7 Contribuição do ruído no sinal refeito com o método TDD para umexcitação impulso no sensor 10. Medição feita com os dados deaceleração sem alteração e com os dados poluídos. . . . . . . . . . . . 34
8 Valores MAC das formas modais obtidas pelo TDD para um excitaçãoimpulso no sensor 8. Medição feita com os dados de aceleração semalteração e com os dados poluídos. . . . . . . . . . . . . . . . . . . . 35
9 Frequências naturais encontrados com o sinal refeito após o métodoTDD para um excitação impulso no sensor 8. Medição feita com osdados de aceleração sem alteração e com os dados poluídos. . . . . . . 35
10 Contribuição do ruído no sinal refeito com o método TDD paraum excitação impulso no sensor 8. Medição feita com os dados deaceleração sem alteração e com os dados poluídos. . . . . . . . . . . . 36
11 Valores de MAC para uma excitação do tipo ruído ao longo da viga. . 3712 Frequências naturais do sinal refeito para uma excitação do tipo ruído
ao longo da viga. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3713 Contribuição do ruído no sinal refeito para uma excitação do tipo
aleatória ao longo da viga. . . . . . . . . . . . . . . . . . . . . . . . . 3814 Resultados de uma excitação impulso na borda da viga sem poluir os
dados para um Filtro com variação da banda de passagem de 2% . . 3815 Resultados de uma excitação impulso na borda da viga sem poluir os
dados para um Filtro com variação da banda de passagem de 30% . . 3816 Taxa de amortecimento por modo de vibração . . . . . . . . . . . . . 4117 Resultado relativo à uma viga com amortecimento de Rayleigh.
Excitação impulso na borda da viga sem poluição dos dados . . . . . 4218 Valores MAC das formas modais obtidas pelo TDD com dados poluídos
de 10% para um excitação impulso no sensor 10. . . . . . . . . . . . . 43
ix
19 Frequências naturais encontrados com o sinal refeito após o métodoTDD para dados poluídos de 10%. Medição feita com excitaçãoimpulso no sensor 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
20 Contribuição do ruído no sinal refeito com o método TDD para dadospoluídos de 10%. Medição feita com excitação impulso no sensor 10. . 44
21 Propriedades da viga utilizada no experimento . . . . . . . . . . . . . 4522 Frequências naturais obtidas com dados experimentais para viga
bi-apoiada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4523 Formas modais obtidas com dados experimentais para viga bi-apoiada. 45
x

Sumário
1 Introdução 11.1 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Revisão Bibliográfica . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.4 Organização do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Teoria 52.1 Considerações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Extração das formas modais . . . . . . . . . . . . . . . . . . . . . . . 62.3 Obtenção de outros parâmetros modais . . . . . . . . . . . . . . . . . 92.4 Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.5 Discussão sobre a teoria . . . . . . . . . . . . . . . . . . . . . . . . . 11
3 Algoritmo e aplicação 123.1 Visão Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.2 Simulação Elementos Finitos . . . . . . . . . . . . . . . . . . . . . . . 14
3.2.1 Modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.2.2 Análise modal com problema de autovalor e autovetor . . . . . 15
3.3 Intervalo das frequências naturais - Densidade Espectral de Potência . 173.3.1 Convergência do Método de Elementos Finitos . . . . . . . . . 19
3.4 Filtro Passa-Banda . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.5 Poluição dos dados . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4 Resultados e análise 264.1 Sinal de excitação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.2 Sinal de resposta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.3 Método de comparação . . . . . . . . . . . . . . . . . . . . . . . . . . 314.4 Análises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.4.1 Resposta com excitação impulso no sensor 10 ao final da viga 324.4.2 Resposta com excitação impulso ao variar a posição de impacto
na viga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.4.3 Resposta com excitação ruído ao longo da viga . . . . . . . . . 354.4.4 Alteração da banda de passagem do filtro . . . . . . . . . . . . 374.4.5 Adição de amortecimento ao modelo . . . . . . . . . . . . . . 394.4.6 Aumento da poluição dos dados . . . . . . . . . . . . . . . . . 424.4.7 Dados experimentais . . . . . . . . . . . . . . . . . . . . . . . 43
xi

5 Conclusão 49
Referências Bibliográficas 50
xii

1 Introdução
1.1 Motivação
No ramo da engenharia mecânica ou da engenharia civil, toda estrutura estánaturalmente sujeita a esforços para os quais ela foi projetada ou então por cargas nãoesperadas. Dessa forma, o seu uso poderá gerar danos que podem levar a uma falhacrítica que ocorre em um período menor que a vida útil para a qual ela foi concebida.É de interesse conhecer técnicas não destrutivas que possam ajudar a identificaresses danos principalmente se forem internos, dado o seu difícil diagnóstico. Maisinteressante ainda seria que essas técnicas permitissem um monitoramento remotopara a garantia da integridade estrutural e para a prevenção de falhas. Essa área deconhecimento da engenharia é chamada de Monitoração da Integridade Estruturalou Structural Health Monitoring (SHM) em inglês [2].
A quantidade de pesquisas no domínio de Monitoração da Integridade Estruturalapresentou um aumento considerável nos últimos anos, dado pelo seu potencial emgarantir a segurança de projetos e pelo seu benefício econômico. Praticamente todasa indústrias privadas e públicas querem detectar os danos o mais rápido possívelem seus produtos ou na sua infraestrutura e , para tal, a detecção requer que elasusem alguma forma de Monitoração da Integridade Estrutural. Como exemplo,companhias aeroespaciais em conjunto com agências governamentais estudam essatecnologia para identificar danos na nave espacial que estão escondidos pelos escudostérmicos [2]. Além disso, atualmente não existem métodos quantitativos robustospara determinar se uma construção está segura para reocupação após um terremoto[2] e, neste contexto, as pesquisas em SHM podem levar ao desenvolvimento detécnicas mais eficientes e robustas. Por fim, a maior parte da manutenção de sistemasestruturais e mecânicos é feita em uma referência temporal, onde é verificado apóscerto tempo de uso se o produto/estrutura está em boas condições. A tecnologia deMonitoração da Integridade Estrutural vai permitir o atual pensamento de fazer amanutenção baseada no tempo de uso evoluir para um baseado no estado mecânicoatual da estrutura, sendo este potencialmente mais eficiente em termos de custo [2].
Como Friswell [3] explica bem, uma das técnicas possíveis para a Monitoraçãoda Integridade Estrutural é o uso de métodos inversos na detecção de danos usandodados de vibração. Como um dano é a mudança das propriedades do material e/ougeométricas, o desempenho observado da estrutura obrigatoriamente mudará. Dessaforma, esta técnica baseia-se na medição periódica de dados saída, como a aceleração,por exemplo, e modelo, normalmente de elementos finitos, para a estimação do dano.Uma representação esquemática da metodologia se encontra na Figura 1. Assim, uma
1
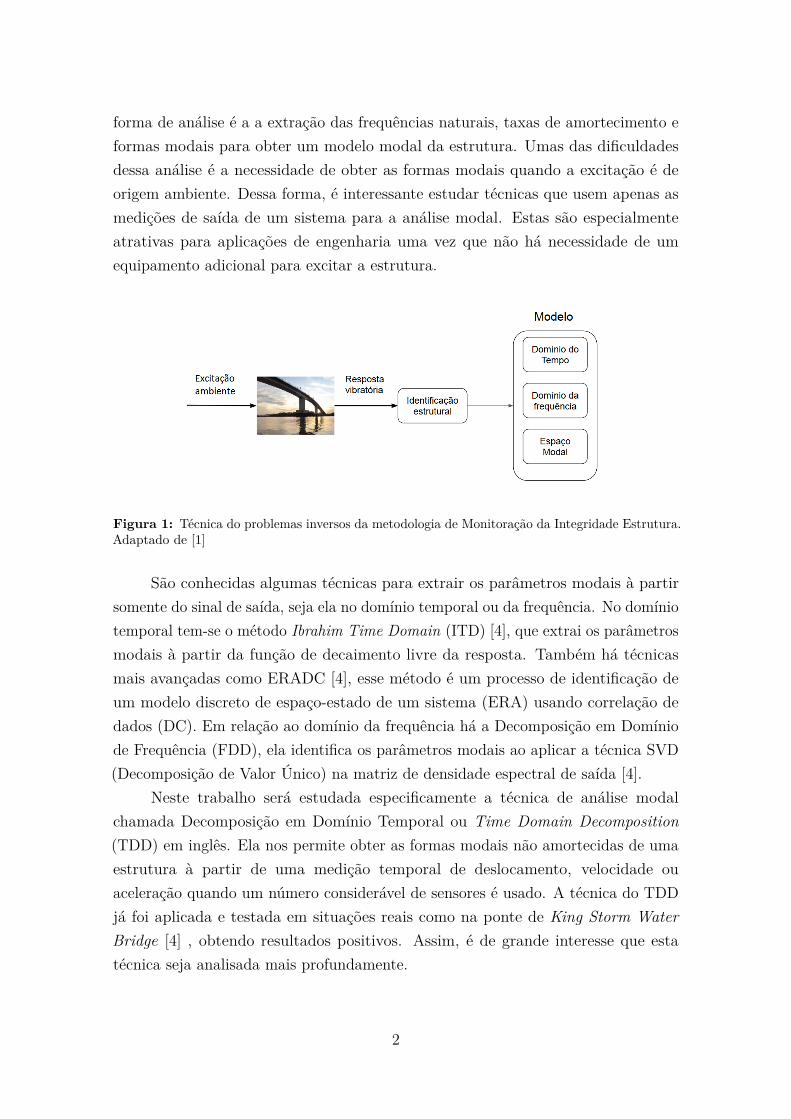
forma de análise é a a extração das frequências naturais, taxas de amortecimento eformas modais para obter um modelo modal da estrutura. Umas das dificuldadesdessa análise é a necessidade de obter as formas modais quando a excitação é deorigem ambiente. Dessa forma, é interessante estudar técnicas que usem apenas asmedições de saída de um sistema para a análise modal. Estas são especialmenteatrativas para aplicações de engenharia uma vez que não há necessidade de umequipamento adicional para excitar a estrutura.
Figura 1: Técnica do problemas inversos da metodologia de Monitoração da Integridade Estrutura.Adaptado de [1]
São conhecidas algumas técnicas para extrair os parâmetros modais à partirsomente do sinal de saída, seja ela no domínio temporal ou da frequência. No domíniotemporal tem-se o método Ibrahim Time Domain (ITD) [4], que extrai os parâmetrosmodais à partir da função de decaimento livre da resposta. Também há técnicasmais avançadas como ERADC [4], esse método é um processo de identificação deum modelo discreto de espaço-estado de um sistema (ERA) usando correlação dedados (DC). Em relação ao domínio da frequência há a Decomposição em Domíniode Frequência (FDD), ela identifica os parâmetros modais ao aplicar a técnica SVD(Decomposição de Valor Único) na matriz de densidade espectral de saída [4].
Neste trabalho será estudada especificamente a técnica de análise modalchamada Decomposição em Domínio Temporal ou Time Domain Decomposition(TDD) em inglês. Ela nos permite obter as formas modais não amortecidas de umaestrutura à partir de uma medição temporal de deslocamento, velocidade ouaceleração quando um número considerável de sensores é usado. A técnica do TDDjá foi aplicada e testada em situações reais como na ponte de King Storm WaterBridge [4] , obtendo resultados positivos. Assim, é de grande interesse que estatécnica seja analisada mais profundamente.
2

1.2 Objetivos
O Objetivo deste trabalho é apresentar a técnica da Decomposição em DomínioTemporal (TDD) que permite extrair os parâmetros modais de um sistema, maisprecisamente as formas modais não amortecidas, à partir somente de dados de saídacomo o deslocamento, velocidade e aceleração.
Este trabalho, com a programação em Matlab R©, também tem o objetivo deavaliar os resultados dessa técnica segundo o que ela propõe. Para tanto, será usada ateoria de elementos finitos para simular uma viga com o auxílio do Toolbox CALFEMdo Matlab R©. Dessa forma, dados sintéticos vão permitir a análise do TDD.
1.3 Revisão Bibliográfica
Worden e Farrar [2] fazem uma introdução à teoria de Monitoração daIntegridade Estrutural, apresentando assim um escopo geral da metodologia.Friswell [3] também retrata essa temática em seu artigo, com o foque maior sobre ométodo dos problemas inversos.
A técnica de Decomposição no Domíno Temporal deste estudo foi baseadanos artigos realizados por Byeong et al. [4] , e pelos dois artigos de CASTELLO eHERNANDEZ et al. em [5] e [6].
Em [7] é apresentada a teoria de elementos finitos que é necessária para usara ferramenta CALFEM, utilizada para a simulação de sistemas físicos. Em [8] ,um manual de utilização desse Toolbox, assim como as teorias que a compõe sãoapresentadas.
Por fim, em [1] encontra-se um curso sobre métodos de identificação parasistemas estruturais. Nele são abordados as teorias da Monitoração da IntegridadeEstrutural, de Vibrações e Tratamento de Sinais, que são de grande importânciapara o estudo deste trabalho.
1.4 Organização do Trabalho
Primeiramente, na Seção 2, é apresentada a base da teoria da Decomposiçãoem Domínio Temporal que é o foco deste estudo. Serão retradadas as hipóteses ecomo as formas naturais de vibração podem ser adquiridas matematicamente à partirda medição do sinal de saída.
Na Seção 3, é discutido como foi feita a simulação em Elementos Finitosnecessária para obter os dados sintéticos. Também encontram-se nessa seção asconsiderações importantes para a aplicação do algoritmo, como o filtro necessáriopara a teoria e a forma de estimar uma faixa de frequências naturais. Por fim, é
3
discutido como será feito para poluir os dados de medição e assim testar a robustezdo TDD.
Na Seção 4, são analisados os resultados obtidos pelo algoritmo aplicado. Serádiscutido a pertinência da técnica de estudo para certas situações como ela sendoaplicada para excitações diferentes, para dados de saída poluídos, para uma alteraçãodo filtro aplicado, para adição de amortecimento ao modelo e para dados obtidosexperimentalmente.
Na Seção 5, são apresentadas as conclusões.
4

2 Teoria
A teoria da Decomposição em Domínio Temporal (TDD) será detalhada nessaseção. Este capítulo possui como base os estudos feitos no artigo de Byeong et al [4].
2.1 Considerações
Para a discussão da teoria, considera-se uma viga como a representada abaixo naFigura 2. Ela é uma viga engastada-livre com p sensores de deslocamento instaladosque medirão o movimento vertical.
Figura 2: Viga engastada-livre com p sensores
Como descrito anteriormente, em primeiro lugar deve-se ter uma resposta saídado sistema, seja ela o deslocamento, a velocidade ou a aceleração. Pela teoria daálgebra linear, é de conhecimento geral que um vetor pode ser escrito pela combinaçãolinear de seus vetores base, e no caso da dinâmica linear, uma base para a respostade saída são as formas modais ortogonais. Dessa forma, para o caso considerado, ovetor do perfil do deslocamento y(t) em um tempo t causado por uma carga qualquerarbitrária, pode ser escrito como
y(t) =∞∑
i=1ci(t)ϕi (2.1)
Onde y(t) = [y1, y2 . . . yp(t)]T é o vetor do perfil de deslocamento da resposta medidae ϕi = [ϕ1i, ϕ2i . . . ϕpi]T é a i-ésima forma natural de vibração. A variável ci(t)corresponde à i-ésima contribuição modal deste modo de vibração no deslocamento.Pode-se fazer a mesma análise para a saída da aceleração ao diferenciar a equação2.1, obtêm-se assim
y(t) =∞∑
i=1ci(t)ϕi (2.2)
Considerando que uma aceleração contínua seja amostrada à uma frequência deF amostras por segundo, deve-se prevenir a aliasing espectral nessa etapa de mediçãoe assim as respostas são assumidas pré-filtradas através de um filtro passa-baixa ouanálogo. A frequência de limite do filtro B deve respeitar a condição que B < F/2.Adotando-se a hipótese de que a resposta do sistema pode ser representada, com
5

certo nível de acurácia, pelos n primeiros modos de vibração, a versão no tempodiscreto da equação 2.2 é dada como segue abaixo. O perfil de aceleração discretoy(k.∆t), onde k é a amostragem e ∆t é a discretização do tempo, será utilizado apartir deste ponto como y(k).
y(k) =n∑
i=1ci(k)ϕi + εt(k) (2.3)
Onde
εt(k) =m∑
n+1ci(k)ϕi
E o vetor εt(k) de dimensão p× 1 representa o erro de truncamento no tempo daamostra k, com m sendo o número de modos.
Em uma abordagem de único-grau-de-liberdade (UGDL), é assumido que ocomportamento de um sistema na vizinhança de uma ressonância é determinadomajoritariamente pelo respectivo modo de vibração. Dessa forma, ao contrário de umaabordagem de múltiplos-graus-de-liberdade (MGDL), o UGDL possui basicamenteum único modo e este essencialmente contribuirá na resposta do sistema.
Como as acelerações medidas são amostradas em sensores de múltiplaslocalizações, a resposta pode ser classificada como uma saída de um sistema demúltiplos-graus-de-liberdade, o que é o caso para a grande maioria das estruturasreais. Assim, há a obrigatoriedade de extrair do sinal MGDL obtido os sinais UGDLrespectivos de cada modo isoladamente.
Dentre as alternativas de extrações possíveis [4], uma solução simples e práticapara tal problema é a utilização de filtros digitais passa-banda. Ao projetar um filtrodesse tipo que permita a passagem do sinal para a faixa de frequências correspondentea um único modo, é possível realizar a transformação de um sinal MGDL para umsinal UGDL.
2.2 Extração das formas modais
Adotando-se a hipótese de que o sistema apresenta modos bem espaçados,pode-se considerar que o sinal filtrado yi obtido à partir da filtragem do sinal originaly(t) pode ser representado como segue:
yi(k) = ci(k)ϕi + εf (k) (2.4)
No qual o índice i denota que o sinal original y foi filtrado utilizando um filtro comfrequência central ao redor do i-ésimo modo e o vetor εf (k) de dimensão p × 1
6

representa o ruído causado pela amostragem no tempo k e pelo filtro.Supondo que o vetor p× 1 da aceleração UGDL já isolado na amostra k , yi(k)
, contenha o espaço modal e o espaço ortogonal de ruído, a dimensão do espaçomodal será 1, correspondendo ao i-ésimo modo, e a dimensão do espaço de ruídoserá o restante p− 1.
Assim, o vetor ruído de dimensão p × 1 pode se escrito na sua basecorrespondente:
εf (k) =p−1∑j=1
dj(k)ψ(i)j (2.5)
Onde ψ(i)j = [ψi
1j, ψi2j . . . ψ
ipj]T representa o j-ésimo vetor de dimensão p × 1 da
i-ésima base ortogonal correspondente ao ruído após a filtragem no i-ésimo modo edj(k) é a contribuição do j-ésimo vetor do ruído no vetor de erro total, εf (k), naamostra de tempo k.
Assim, ao reescrever a equação 2.4, a equação do vetor correspondente àaceleração de único-grau-de-liberdade torna-se
yi(k) = ci(k)ϕi +p−1∑j=1
dj(k)ψ(i)j (2.6)
Ao tomar N medições, pode-se reescrever a equação 2.6 sob a forma expandidaabaixo
y1i(1) y1i(2) . . . y1i(N)y2i(1) y2i(2) . . . y2i(N)
... ... . . . ...ypi(1) ypi(2) . . . ypi(N)
=
ϕ1i
ϕ2i
...ϕpi
[ci(1) ci(2) . . . ci(N)
]
+p−1∑j=1
ψi
1j
ψi2j...ψi
pj
[dj(1) dj(2) . . . dj(N)
]
A equação acima pode ser escrita também de uma forma concisa como
Yi = ϕicTi +
p−1∑j=1ψ
(i)j d
Tj (2.7)
Onde Yi é uma matrix p×N que representa a história temporal medida da saídada aceleração após o isolamento do modo i. O vetor ci = [ci(1), ci(2) . . . ci(N)]T de
7

dimensão N × 1 representa a i-ésima contribuição modal da aceleração na respostatemporal. Por fim, dj = [dj(1), dj(2) . . . dj]T é um vetor N × 1 correspondente àj-ésima contribuição do ruído em função do tempo.
Para a próxima etapa da teoria, multiplica-se essa história temporal Yi pelasua transposta como na equação 2.8.
Os componentes [Ei]q,r da matriz Ei são proporcionais à correlação cruzadaentre as respostas dos q-ésimo e r-ésimo sensores, calculados no atraso (lag) igual azero. Esta afirmação baseia-se na hipótese de que os sinais são ergódicos.
Ei = YiYTi (2.8)
Assim, pode-se substituir a equação 2.7 na equação 2.8 para obter
Ei = ϕicTi ciϕ
T +ϕicTi
p−1∑j=1djψ
(i)j
T +p−1∑j=1ψ
(i)j d
Tj ciϕ
Ti +
p−1∑j=1
p−1∑k=1ψ
(i)j d
Tj dkψ
(i)k
T (2.9)
Considerando que qualquer vetor 1×N das linhas pertencentes à matriz Yi
da equação 2.7 sejam formadas pelo espaço modal e pelo espaço ortogonal de ruído,algumas simplificações podem ser feitas. O vetor que denota a i-ésima contribuiçãomodal da história temporal ci também pode ser visto como uma base que vaiconstituir o espaço modal. O mesmo pode ser dito para o espaço de ruído que vaiser formado por p− 1 bases que representam o j-ésimo fator de contribuição para oruído dj , onde o j varia de 1 à p− 1. Dessa forma, analisar essas contribuições comobases ortogonais, as seguintes relações são válidas
cTmcn =
qm, m = n
0, m 6= n(2.10a)
dTmdn =
σm, m = n
0, m 6= n(2.10b)
cTmdn = dT
mcn = 0 (2.10c)
Assim, a equação 2.9 pode ser simplificada e ela se torna
Ei = ϕiqiϕTi +
p−1∑j=1ψ
(i)j σjψ
(i)j
T (2.11)
Onde os valores escalares qi = cTi ci e σj = dT
j dj representam o nível da energia doi-ésimo modo e das j-ésima formas ψ(i)
j
8
A equação 2.11 pode ser reescrita como
Ei = UΩUT (2.12)
Onde a matriz unitária U = [ϕi,ψ(i)1 ,ψ
(i)2 . . .ψ
(i)p−1] de dimensão p× p é a matriz de
vetores singulares de Ei, e a matriz diagonal Ω = diag[qi, σ1, σ2 . . . σp−1] é a matrizde valores singulares de Ei. Assume-se que as ordens dos valores singulares segueqi > σ1 > σ2 > · · · > σp−1, e assim o i-ésimo modo natural não amortecido ϕi podeser obtido tomando-se o primeiro vetor singular após uma Decomposição em ValoresSingulares (SVD) de Ei.
Os valores singulares correspondentes ao ruído σ1, σ2 . . . σp−1 deverão ser zerocaso não haja ruído no sinal. Se houver um ruído, esses valores existirão, entretantoeles serão muito baixos se comparados à qi. Pode-se considerar os valores singularescomo um nível de energia das amostras que contribuem para o modo de vibraçãocorrespondente, assim quanto mais desprezíveis forem os valores de σ menor será oerro de medição proveniente dos ruídos.
A teoria foi baseada em medições de aceleração, mas para medições dedeslocamento ou velocidade, a equação 2.4 pode ser substituída para as notações deyi(k) = ci(k)ϕi + εf (k) ou yi(k) = ci(k)ϕi + εf (k), respectivamente. Neste caso,as contribuições modais serão diferentes mas as formas modais de vibração não vãomudar. Dessa forma, o mesmo procedimento pode ser aplicado para estas outrasalternativas de medições de respostas.
2.3 Obtenção de outros parâmetros modais
Como foi discutido, uma forma de isolar o sistema MGDL em UGDL é ter umaideia da faixa das frequências naturais para assim aplicar o filtro passa-banda. Umasugestão para isso é utilizar a Densidade Espectral de Potência do sinal, que seráabordada adiante. Dessa forma, é possível aplicar o método TDD sem conhecer comexatidão as frequências naturais.
Após obter as formas modais não amortecidas, a próxima etapa é encontrarum método para descobrir os outros parâmetros modais da teoria, como a taxa deamortecimento e a frequência natural exata. Pré-multiplicando a equação 2.7 pelatransposta da forma modal correspondente ao modo isolado ϕi, obtêm-se
ϕTi Yi = ϕT
i ϕicTi +ϕT
i
p−1∑j=1ψ
(i)j d
Tj (2.13)
O segundo termo da equação 2.13 desaparece pois adota-se a hipótese de que a
9

base do ruído é ortogonal à forma modal. Dessa forma, isola-se o fator de contribuiçãoao i-ésimo modo cT
i e encontra-se
cTi = 1
ϕTi ϕi
ϕTi Yi (2.14)
Tendo encontrado uma equação para o fator de contribuição cTi , o sinal da
resposta pode ser refeito ao utilizar a equação 2.4 e desprezando o termo do ruído
yi(k) = ci(k)ϕi (2.15)
O sinal contém um sistema de única saída UGDL que foi calculado à partir dossinais da resposta de todos os p sensores em uma amostragem de N medidas. Essesinal de saída representa o comportamento do i-ésimo modo da aceleração. Assim, oauto-espectro do sinal refeito e do cT
i vai conter apenas um pico, a frequência nestepico é a frequência natural do i-ésimo modo.
Para cada modo, pode-se usar um outro método de análise modal para extrairas taxas de amortecimento e as frequências naturais exatas, como o ERADC oupeak-picking, a partir do sinal de aceleração UGDL refeito [4].
Finalmente, o método de obtenção do fator de contribuição modal foi calculadopela aceleração, mas como pode-se ver pela equação 2.14, essa contribuição continuaidêntica para as medidas de deslocamento e velocidade. Dessa forma, os resultadoscontinuam sendo aplicados sem perda de generalidade.
2.4 Resumo
Em resumo, a teoria da Decomposição em Domínio Temporal segue os seguintespassos:
1. É obtida a resposta de um sistema através de p sensoress de deslocamento,velocidade ou aceleração. A excitação exercida na estrutura é um carga qualquerarbitrária.
2. Projeta-se um filtro passa banda para cada modo de vibração. A banda depassagem é calculada à patir de uma ideia das frequências naturais. Comoserá abordado mais adiante, neste trabalho foi usada a Densidade Espectral dePotência para tal estimação. Assim, para cada modo haverá uma matriz Yi dedimensão p×N .
3. A matriz Yi é multiplicada pela sua transposta para obter a matriz Ei (verequação 2.8).
10

4. Aplica-se a técnica de Decomposição em Valores Singulares (SVD) na matrizEi para encontrar as matrizes U e Ω (ver equação 2.12).
5. É extraída a primeira coluna de U, ela será a forma de vibração natural nãoamortecida do modo i , ϕi , correspondente à filtragem feita.
6. Calcula-se a fator de contribuição correspondente ao i-ésimo modo filtrado, ci,pela equação 2.14.
7. É refeito o sinal UGDL para cada modo com a equação 2.15 e um método deanálise modal pode ser usado para extrair as frequências naturais exatas e ataxa de amortecimento.
2.5 Discussão sobre a teoria
O método da Decomposição em Domínio Temporal baseia-se em separar amedição do sinal MGDL em um conjunto de sinais UGDL isoladamente por modo eas formas modais são extraídas à partir da decomposição de valores singulares damatriz Ei obtida pela resposta. Ele se torna mais eficiente conforme o número desensores aumenta na estrutura, obtendo assim maior resolução nas formas modais.
A técnica é dividida em uma parte somente espacial, para a identificação dasformas modais, e em uma parte somente temporal, para a identificação de frequênciasnaturais e taxas de amortecimento. Este procedimento leva a uma simplicidade eeficiência na hora do processamento de dados. Outra vantagem da separação deanálise entre tempo e espaço é que a acurácia do método para extrair as formasmodais não depende do número de pontos temporais da amostragem ou da resoluçãoda frequência. Assim, as formas modais convergem rapidamente em relação aonúmero de amostras obtidas.
Dessa forma, técnica de Decomposição em Domínio Temporal é especialmenteútil para a análise modal de grandes estruturas excitadas pelo ambiente uma vezque a suas baixas frequências são de grande interesse. O TDD pode ser aplicado semmaiores problemas numa aplicação em tempo real já que o processo de filtragemnecessário para a isolação do modo pode ser feito por um circuito eletrônico ou porum pré-tratamento de dados [4].
11

3 Algoritmo e aplicação
3.1 Visão Geral
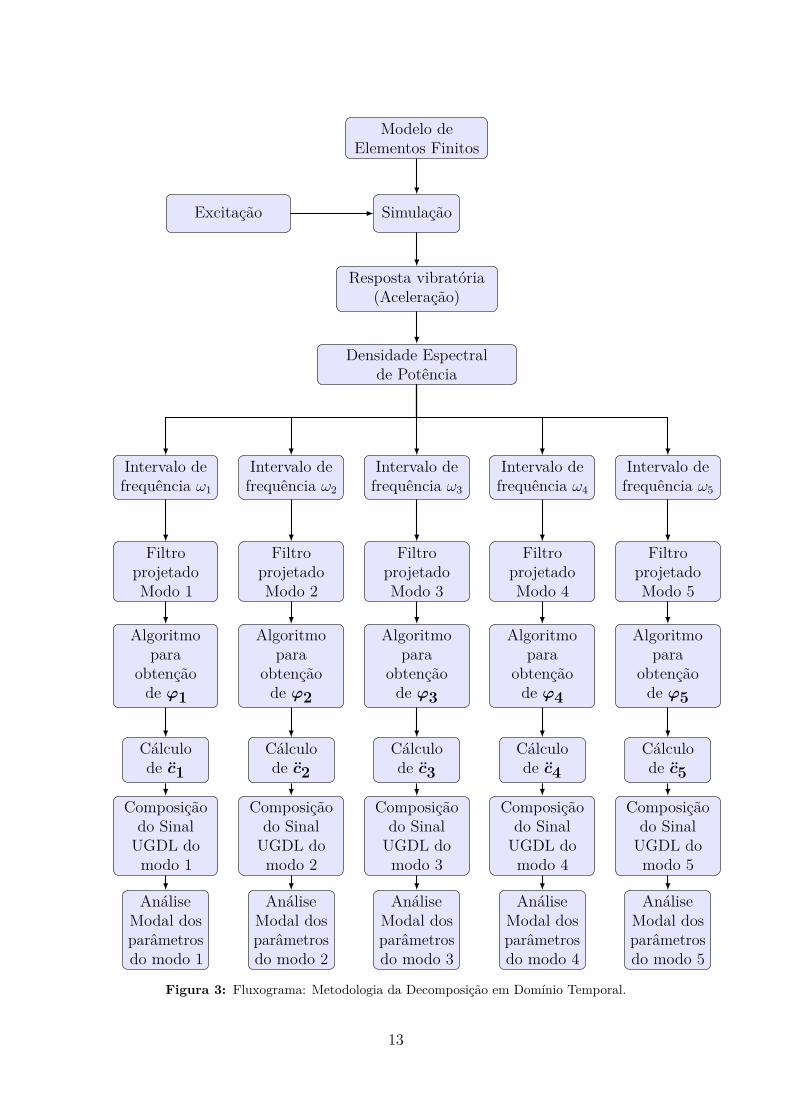
Nesta seção encontra-se a explicação de pontos chaves da metodologia deimplementação do algoritmo da Decomposição em Domínio Temporal que foi realizadoem Matlab R©. Na Figura 3 é representado de forma esquemática o que é feito nocódigo de programação.
Segue uma explicação sucinta sobre a metodologia apresentada no fluxograma.Primeiramente, a partir das propriedades da viga considerada será feita uma simulaçãoem Elementos Finitos pelo CALFEM (Computed Aided Learning o the FiniteElement Method) [8], que é um conjunto de funções feitas para o Matlab R©, afim de gerar dados sintéticos com o objetivo de testar os resultados do método epoder analisá-lo. Com os dados de aceleração, é necessário obter uma ideia dasfrequências naturais para a aplicação do filtro passa-banda. Para isso, foi feita aanálise de Densidade Espectral de Potência no sinal sintético para calcular a faixa dabanda de passagem. Em seguida, um filtro é projetado para cada modo de vibração,neste trabalho os estudos serão feitos até o quinto modo, por consequência haverá 5filtros diferentes. Essa escolha de 5 modos foi puramente arbitrária. Após obter essesfiltros, deve-se aplicá-los no sinal de saída e dessa forma a análise é ramificada em 5caminhos diferentes, sendo um para cada sinal de saída filtrado obtendo um sistemade único-grau-de-liberdade respectivo ao modo isolado. Em cada ramo, aplica-se asequações algébricas como foi explicado na seção 2 sobre a teoria e obtêm-se assim aforma natural de vibração respectiva ao modo considerado. Ainda com as equaçõesteóricas, o sinal de medição pode ser refeito (Equações 2.14 e 2.15) para que os outrosparâmetros modais, como a frequência natural exata e a taxa de amortecimento,possam ser extraídos.
12
Modelo deElementos Finitos
Excitação Simulação
Resposta vibratória(Aceleração)
Densidade Espectralde Potência
Intervalo defrequência ω1
FiltroprojetadoModo 1
Algoritmopara
obtençãode ϕ1
Cálculode c1
Composiçãodo SinalUGDL domodo 1
AnáliseModal dosparâmetrosdo modo 1
Intervalo defrequência ω2
FiltroprojetadoModo 2
Algoritmopara
obtençãode ϕ2
Cálculode c2
Composiçãodo SinalUGDL domodo 2
AnáliseModal dosparâmetrosdo modo 2
Intervalo defrequência ω3
FiltroprojetadoModo 3
Algoritmopara
obtençãode ϕ3
Cálculode c3
Composiçãodo SinalUGDL domodo 3
AnáliseModal dosparâmetrosdo modo 3
Intervalo defrequência ω4
FiltroprojetadoModo 4
Algoritmopara
obtençãode ϕ4
Cálculode c4
Composiçãodo SinalUGDL domodo 4
AnáliseModal dosparâmetrosdo modo 4
Intervalo defrequência ω5
FiltroprojetadoModo 5
Algoritmopara
obtençãode ϕ5
Cálculode c5
Composiçãodo SinalUGDL domodo 5
AnáliseModal dosparâmetrosdo modo 5
Figura 3: Fluxograma: Metodologia da Decomposição em Domínio Temporal.
13

3.2 Simulação Elementos Finitos
3.2.1 Modelo
Criado pela divisão de mecânica estrutural da universidade de Lund no começodos anos 70, o CALFEM permite fazer de forma simples simulações em elementosfinitos através de funções incorporadas na sua configuração. Para poder começara análise, é necessário definir as propriedades físicas da viga. Foi escolhido umaviga engastada-livre fornecida por Gabriel Lucas Sousa da Silva com as propriedadeslistadas na tabela 1 abaixo. A viga não possui amortecimento exceto quando émencionado o contrário durante os estudo dos resultados.
Tabela 1: Propriedades da Viga
Módulo de Elasticidade (GPa) 200Comprimento (m) 0.511Altura (mm) 3.04Base (mm) 30.07Densidade (Kg/m3) 7850
Dessa forma, os outros parâmetros necessários para o cálculo como o momentode inércia e a área são
I = b× h3
12 = 71.875mm4
A = b× h = 93.33 mm2
Para a análise de Elementos Finitos, a viga foi dividida em elementos detamanhos iguais, a ligação entre eles é feita pelo nó que contém 3 graus de liberdade:movimento horizontal, vertical e de rotação. Esta modelagem é representada pelodesenho esquemático encontrado na figura 4.
No desenho, também são definidos os graus de liberdade do ponto engastadona viga mesmo que estes não se movam (e efetivamente não possam ser chamados degraus de liberdade). Não é feita nenhuma medição nesta posição, mas a notação semanteve por uma questão de consistência e simplificação entre as referências desteestudo e o código escrito em Matlab R©.
Em relação à nominação dos sensores, serão identificadas somente as aceleraçõesverticais. Para esta medição serão utilizados 10 sensores espaçados igualmente naviga, como representado na Figura 5.
Dentre as diversas possibilidades de modelagens de vigas, o CALFEM podeconsiderar um elemento do tipo Timoshenko, Euler-Bernoulli ou do tipo não linear.Para este trabalho foi escolhido o modelo de Euler-Bernoulli para a simulação.
14
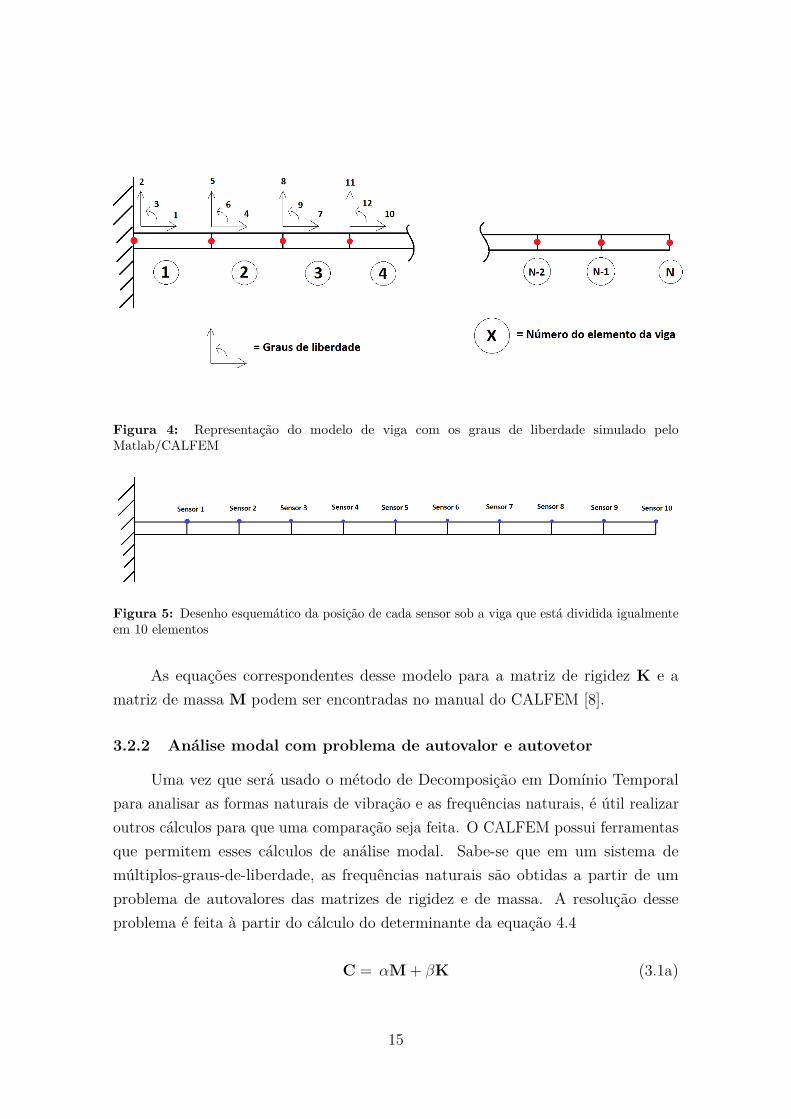
Figura 4: Representação do modelo de viga com os graus de liberdade simulado peloMatlab/CALFEM
Figura 5: Desenho esquemático da posição de cada sensor sob a viga que está dividida igualmenteem 10 elementos
As equações correspondentes desse modelo para a matriz de rigidez K e amatriz de massa M podem ser encontradas no manual do CALFEM [8].
3.2.2 Análise modal com problema de autovalor e autovetor
Uma vez que será usado o método de Decomposição em Domínio Temporalpara analisar as formas naturais de vibração e as frequências naturais, é útil realizaroutros cálculos para que uma comparação seja feita. O CALFEM possui ferramentasque permitem esses cálculos de análise modal. Sabe-se que em um sistema demúltiplos-graus-de-liberdade, as frequências naturais são obtidas a partir de umproblema de autovalores das matrizes de rigidez e de massa. A resolução desseproblema é feita à partir do cálculo do determinante da equação 4.4
C = αM + βK (3.1a)
15
ω2n = λ (3.1b)
Onde K é a matriz de rigidez do sistema, M é a matriz de massa e ωn é o vetor quecontém as frequências naturais de vibração.
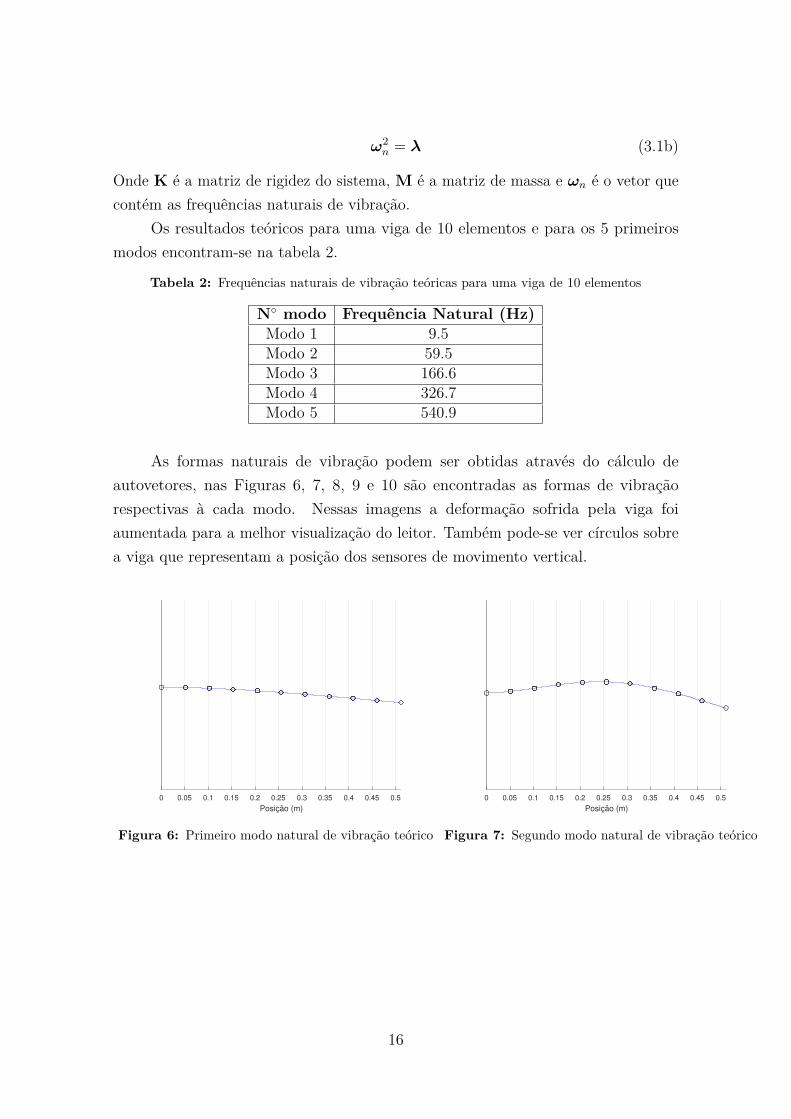
Os resultados teóricos para uma viga de 10 elementos e para os 5 primeirosmodos encontram-se na tabela 2.
Tabela 2: Frequências naturais de vibração teóricas para uma viga de 10 elementos
N modo Frequência Natural (Hz)Modo 1 9.5Modo 2 59.5Modo 3 166.6Modo 4 326.7Modo 5 540.9
As formas naturais de vibração podem ser obtidas através do cálculo deautovetores, nas Figuras 6, 7, 8, 9 e 10 são encontradas as formas de vibraçãorespectivas à cada modo. Nessas imagens a deformação sofrida pela viga foiaumentada para a melhor visualização do leitor. Também pode-se ver círculos sobrea viga que representam a posição dos sensores de movimento vertical.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5Posição (m)
Figura 6: Primeiro modo natural de vibração teórico
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5Posição (m)
Figura 7: Segundo modo natural de vibração teórico
16

0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5Posição (m)
Figura 8: Terceiro modo natural de vibração teórico
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5Posição (m)
Figura 9: Quarto modo natural de vibração teórico
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5Posição (m)
Figura 10: Quinto modo natural de vibração teórico
3.3 Intervalo das frequências naturais - Densidade Espectralde Potência
Após a excitação arbitrária exercida na estrutura deve-se medir as aceleraçõesda resposta do sistema. Essa análise da medição de saída deve ser feita com uma certafrequência de amostragem e é necessário definí-la. O intervalo de tempo entre cadamedição de resposta é de 0,0001 segundo e dessa forma a frequência de amostragemé de 10000 Hz ou 10 kHz. O intervalo total de medição é de 1 segundo.
Como descrito pela teoria da seção 2, primeiramente deve-se ter uma ideia dointervalo de cada frequência natural do sistema para que assim o filtro passa-bandapossa ser projetado. Com este objetivo, a teoria da Densidade Espectral de Potência(PSD) será utilizada. O espectro de potência de uma série temporal descreve a
17

distribuição de potência em termos das componentes de frequência que compõe umsinal (espectro). Para que esse cálculo seja feito é necessário que a energia do sinalesteja concentrada em um intervalo finito de tempo considerável. Como é necessárioencontrar o espectro do sinal, será preciso fazer uma análise da transformada deFourier. O cálculo da Densidade Espectral de Potência é feito à partir do quadradodo valor absoluto desta transformada, como é representado na equação 3.2.
Sxx(f) = |x(f)|2 (3.2)
Onde Sxx(f) é o valor absoluto da transformada de Fourier, x(f), na frequência dosinal f. Por fim, é importante ressaltar que existe outras formas mais precisas decalcular o PSD, porém não foram utilizadas neste trabalho.
Nas figuras 11 e 12 pode-se observar dois exemplos de gráficos da DensidadeEspectral de Potência para o sinal de aceleração medido pelos sensores 2 e 8.
0 100 200 300 400 500 600
Frequência (Hz)
-120
-100
-80
-60
-40
-20
0
Pot
ênci
a/F
requ
ênci
a (d
B/H
z)
Densidade do Espectro de Potência do sensor 2 VS Frequência
Figura 11: PSD do sinal de aceleração do sensor 2
0 100 200 300 400 500 600
Frequência (Hz)
-120
-100
-80
-60
-40
-20
0P
otên
cia/
Fre
quên
cia
(dB
/Hz)
Densidade do Espectro de Potência do sensor 8 VS Frequência
Figura 12: PSD do sinal de aceleração do sensor 8
Os intervalos de frequências naturais serão obtidos através dos picos vistos pelosresultados do PSD. Considera-se um intervalo de 10% ao redor do valor de frequênciacorrespondente a esse pico. Logo, a faixa que será usada pelo filtro passa-bandapara definir a frequência de corte para o i-ésimo modo será entre [90%ωi ; 110%ωi].Entretanto, pode ocorrer um caso no qual o sensor esteja em um nó do modo devibração natural, assim ele não irá vibrar e consequentemente não será visto noespectro de potência. Este fenômeno pode ser visto na Figura 12 para o sensor 8onde o modo 2 de vibração (aproximadamente 59 Hz) não é identificado. Dessaforma, torna-se necessário analisar mais de um sensor a fim de observar todos osmodos de vibração. Finalmente, para a metodologia final todos os sensores foramanalisados e, desta forma, foi observado que a frequência de pico não é alterada aopercorrer os sensores da viga.
18
3.3.1 Convergência do Método de Elementos Finitos
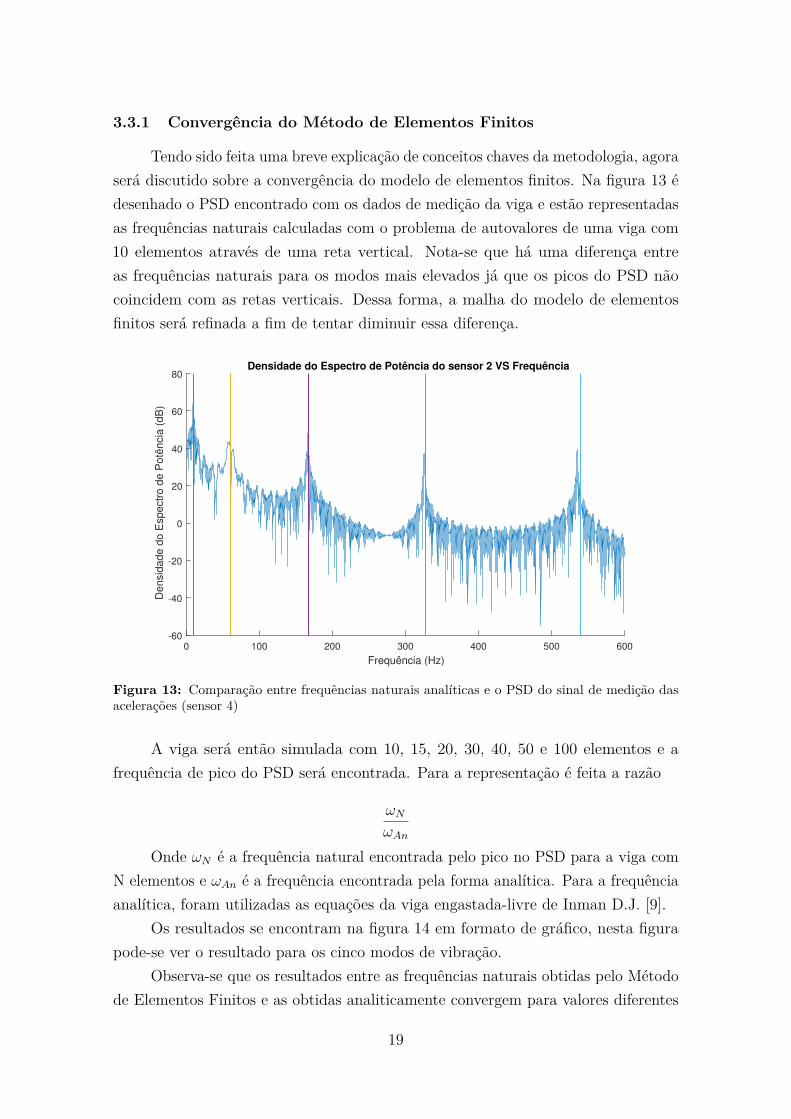
Tendo sido feita uma breve explicação de conceitos chaves da metodologia, agoraserá discutido sobre a convergência do modelo de elementos finitos. Na figura 13 édesenhado o PSD encontrado com os dados de medição da viga e estão representadasas frequências naturais calculadas com o problema de autovalores de uma viga com10 elementos através de uma reta vertical. Nota-se que há uma diferença entreas frequências naturais para os modos mais elevados já que os picos do PSD nãocoincidem com as retas verticais. Dessa forma, a malha do modelo de elementosfinitos será refinada a fim de tentar diminuir essa diferença.
0 100 200 300 400 500 600Frequência (Hz)
-60
-40
-20
0
20
40
60
80
Den
sida
de d
o E
spec
tro d
e P
otên
cia
(dB
)
Densidade do Espectro de Potência do sensor 2 VS Frequência
Figura 13: Comparação entre frequências naturais analíticas e o PSD do sinal de medição dasacelerações (sensor 4)
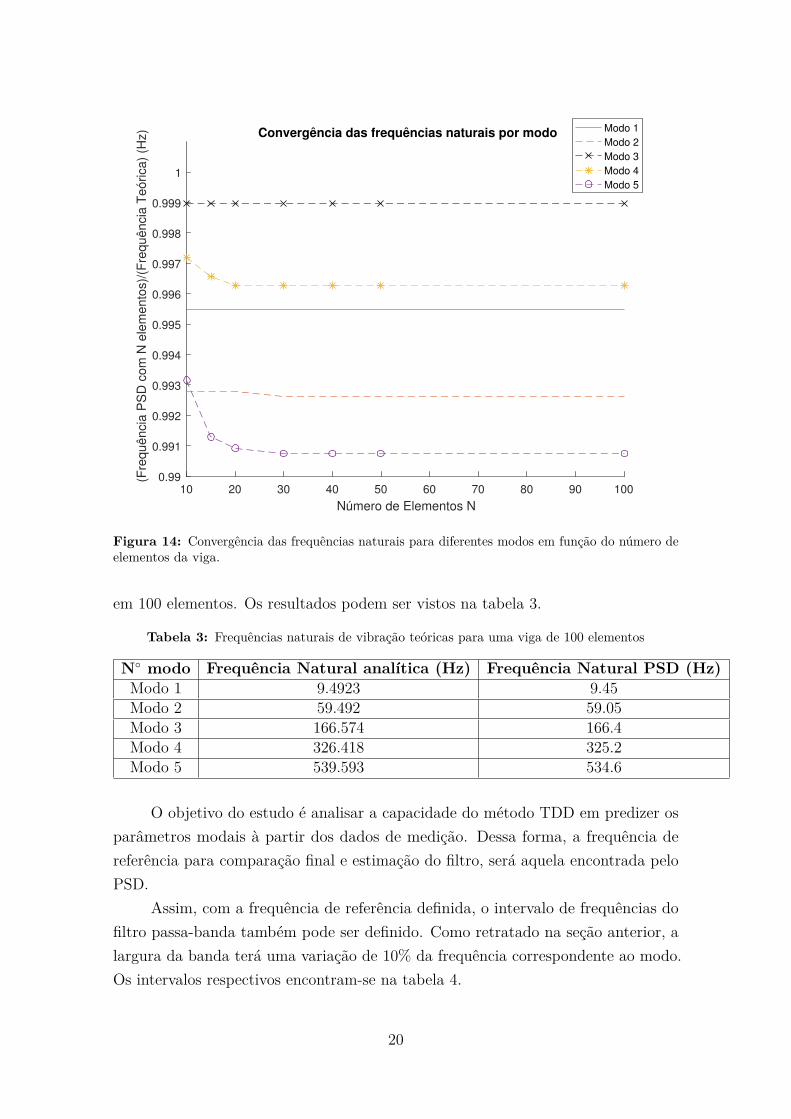
A viga será então simulada com 10, 15, 20, 30, 40, 50 e 100 elementos e afrequência de pico do PSD será encontrada. Para a representação é feita a razão
ωN
ωAn
Onde ωN é a frequência natural encontrada pelo pico no PSD para a viga comN elementos e ωAn é a frequência encontrada pela forma analítica. Para a frequênciaanalítica, foram utilizadas as equações da viga engastada-livre de Inman D.J. [9].
Os resultados se encontram na figura 14 em formato de gráfico, nesta figurapode-se ver o resultado para os cinco modos de vibração.
Observa-se que os resultados entre as frequências naturais obtidas pelo Métodode Elementos Finitos e as obtidas analiticamente convergem para valores diferentes
19
10 20 30 40 50 60 70 80 90 100Número de Elementos N
0.99
0.991
0.992
0.993
0.994
0.995
0.996
0.997
0.998
0.999
1
(Fre
quên
cia
PS
D c
om N
ele
men
tos)
/(Fre
quên
cia
Teór
ica)
(Hz) Convergência das frequências naturais por modo Modo 1
Modo 2Modo 3Modo 4Modo 5
Figura 14: Convergência das frequências naturais para diferentes modos em função do número deelementos da viga.
em 100 elementos. Os resultados podem ser vistos na tabela 3.
Tabela 3: Frequências naturais de vibração teóricas para uma viga de 100 elementos
N modo Frequência Natural analítica (Hz) Frequência Natural PSD (Hz)Modo 1 9.4923 9.45Modo 2 59.492 59.05Modo 3 166.574 166.4Modo 4 326.418 325.2Modo 5 539.593 534.6
O objetivo do estudo é analisar a capacidade do método TDD em predizer osparâmetros modais à partir dos dados de medição. Dessa forma, a frequência dereferência para comparação final e estimação do filtro, será aquela encontrada peloPSD.
Assim, com a frequência de referência definida, o intervalo de frequências dofiltro passa-banda também pode ser definido. Como retratado na seção anterior, alargura da banda terá uma variação de 10% da frequência correspondente ao modo.Os intervalos respectivos encontram-se na tabela 4.
20
Tabela 4: Intervalo de frequências de corte para o projeto do filtro passa-banda
N modo Frequênciade pico (Hz)
Limite inferiorpara o filtro (Hz)
Limite superiorpara o filtro (Hz)
Modo 1 9.45 8.5 10.4Modo 2 59.05 53,2 65Modo 3 166.4 149,8 183Modo 4 325.2 292.7 357.7Modo 5 534.6 481.1 588.1
3.4 Filtro Passa-Banda
O filtro passa-banda tem a função de isolar um único-grau-de-liberdade daresposta que contém múltiplos-graus-de-liberdade. Ele fará isso ao filtrar os diversosgraus de liberdade e fazer com que apenas um domine a resposta, para isso énecessário que o intervalo de frequências seja bem definido. Como explicado na seçãoanterior, pode-se obter um intervalo de frequência que definirá as frequências decortes do filtro passa-banda.
Neste estudo, o filtro utilizado é o filtro do tipo Butterworth em formato digital.Para encontrar as funções de transferência características através do Matlab R©,foram estudadas duas opções: uma através da função butter já pré-estabelecidano Matlab R©, e outra através da ferramenta FDATools também do Matlab R©.Esta subseção tem o objetivo de explicar a escolha entre um dos dois métodos,como a opção do filtro obtido pela função butter encontra problemas na filtragem,esta subseção também tem o intuito de discutir as suas diferenças a fim de evitardificuldades futuras.
Primeiramente define-se a ordem do filtro a ser projetado, em ambos os métodosele possui ordem 4. Pelo primeiro método, a função necessita passar a ordem eas frequências de corte superior e inferior, pelo segundo método, o FDAToolspermite a criação de qualquer filtro mas apenas o Butterworth será considerado,nesta ferramenta especifica-se também a ordem e as frequências de corte. Uma janelarepresentativa do FDATools encontra-se na Figura 15.
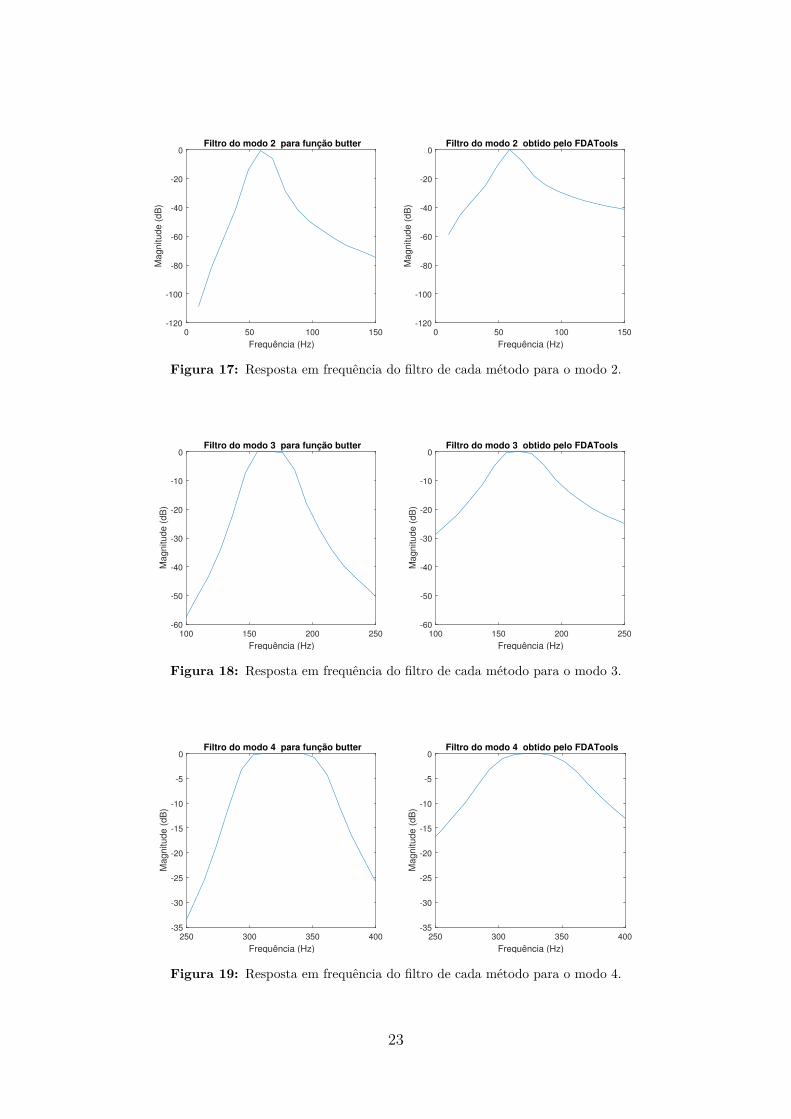
Assim, para as frequências de corte especificadas na tabela 4, as figuras 16-20representam o projeto do filtro passa-banda Butterworth para cada modo e paracada método.
Pelas figuras 16-20 pode-se observar que os filtros têm dificuldade em filtrarintervalos de frequências muito baixos. No caso do filtro projetado com a funçãobutter, para frequências entre 10 e 25 Hz, ele tende a aumentar o sinal da respostaao contrário de filtrar. Para o caso do filtro obtido pelo FDATools, embora ele tenhadificuldades para filtrar baixas frequências, ele continua filtrando o sinal. Para os
21

Figura 15: Janela de configuração da ferramenta FDATools já parametrizada para o terceiromodo.
demais modos este problema não ocorre, entretanto isto é algo à ser levado em contana escolha do filtro passa-banda caso frequências baixas queiram ser analisadas.
Dessa forma, o filtro escolhido para este trabalho foi este obtido pela ferramentaFDATools.
0 20 40 60 80 100Frequência (Hz)
-60
-40
-20
0
20
40
Mag
nitu
de (d
B)
Filtro do modo 1 para função butter
0 20 40 60 80 100Frequência (Hz)
-60
-40
-20
0
20
40
Mag
nitu
de (d
B)
Filtro do modo 1 obtido pelo FDATools
Figura 16: Resposta em frequência do filtro de cada método para o modo 1.
22
0 50 100 150Frequência (Hz)
-120
-100
-80
-60
-40
-20
0M
agni
tude
(dB
)Filtro do modo 2 para função butter
0 50 100 150Frequência (Hz)
-120
-100
-80
-60
-40
-20
0
Mag
nitu
de (d
B)
Filtro do modo 2 obtido pelo FDATools
Figura 17: Resposta em frequência do filtro de cada método para o modo 2.
100 150 200 250Frequência (Hz)
-60
-50
-40
-30
-20
-10
0
Mag
nitu
de (d
B)
Filtro do modo 3 para função butter
100 150 200 250Frequência (Hz)
-60
-50
-40
-30
-20
-10
0
Mag
nitu
de (d
B)
Filtro do modo 3 obtido pelo FDATools
Figura 18: Resposta em frequência do filtro de cada método para o modo 3.
250 300 350 400Frequência (Hz)
-35
-30
-25
-20
-15
-10
-5
0
Mag
nitu
de (d
B)
Filtro do modo 4 para função butter
250 300 350 400Frequência (Hz)
-35
-30
-25
-20
-15
-10
-5
0
Mag
nitu
de (d
B)
Filtro do modo 4 obtido pelo FDATools
Figura 19: Resposta em frequência do filtro de cada método para o modo 4.
23

400 450 500 550 600 650 700Frequência (Hz)
-40
-35
-30
-25
-20
-15
-10
-5
0
Mag
nitu
de (d
B)
Filtro do modo 5 para função butter
400 450 500 550 600 650 700Frequência (Hz)
-40
-35
-30
-25
-20
-15
-10
-5
0
Mag
nitu
de (d
B)
Filtro do modo 5 obtido pelo FDATools
Figura 20: Resposta em frequência do filtro de cada método para o modo 5.
24

3.5 Poluição dos dados
Para testar a robustez da técnica da Decomposição em Domínio Temporal, seráestudado a influência de uma aleatoriedade no sinal de medição da aceleração. Osinal poluído terá uma diferença de mais ou menos 1% do valor máximo da mediçãodurante todo o intervalo de tempo, onde a distribuição aleatória utilizada é do tipouniforme. O cálculo é feito pela equação abaixo.
Apoluido = Amedido ± 0.01×Amáximo (3.3)
Na figura 21 pode ser visto uma ampliação do gráfico de aceleração em funçãodo tempo com o sinal original e o sinal poluído. Caso fosse desenhado o intervalointeiro de medição de 1 segundo, não seria possível ver a diferença entre os doissinais.
É importante dizer que esse tipo de poluição não retrata todos os casos possíveise que ele pode até ser considerado baixo em função da aplicação. Por exemplo, umcaso no qual uma fresa está usinando uma peça, somente nas frequências onde háo corte provocado pela ferramente que haverá incertezas na medição. Entretanto,como o objetivo é fazer uma primeira análise do método TDD, este tipo de poluiçãofoi realizado.
0.126 0.128 0.13 0.132 0.134 0.136
Tempo (s)
0.18
0.2
0.22
0.24
0.26
0.28
0.3
Ace
lera
ção
(m/s
²)
Medição da aceleração em função do tempo no sensor 4
Sinal originalSinal poluido
Figura 21: Ampliação da Figura 24. Sinal resposta da aceleração em função do tempo.
25

4 Resultados e análise
Neste capítulo serão estudados os resultados obtidos após a aplicação doalgoritmo emMatlab R© do método TDD com as considerações discutidas nos capítulos2 e 3. Em um primeiro momento será retratado o sinal de excitação imposto nomodelo, em seguida a resposta das acelerações após o TDD, ou seja, com um sistemade único-grau-de-liberdade. Depois disso são apresentados os métodos de comparaçãoseguido dos resultados. Nesta parte final também será estudado o impacto ao variaralguns parâmetros chaves do método, como a variação do intervalo da banda depassagem do filtro Butterworth e o tipo de excitação imposta na viga. Por fim, éestudado o algoritmo TDD com a utlização de dados reais obtidos experimentalmente.
4.1 Sinal de excitação
Foi definido na teoria do capítulo 2 que a técnica da Decomposição em DomínioTemporal funciona para uma força arbitária, mesmo assim será definido o tipo deforça utilizada na simulação de elementos finitos. Haverá dois tipos de excitação,uma força impulso que aumenta de intensidade linearmente de 0 à 1 Newton emum intervalo de tempo de 0,15 segundo e após isso desce linearmente de 1 Newtonaté 0 em um intervalo de tempo de 0,10 segundo. Como é feita a medição para 1segundo, o resto da excitação permanece constante e igual à zero, a sua representaçãose encontra na figura 22.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1Tempo (s)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Forç
a (N
)
Excitação impulso realizada na viga
Figura 22: Representação da excitação impulso exercida na viga
O outro tipo de excitação é um ruído, ele é importante uma vez que um
26
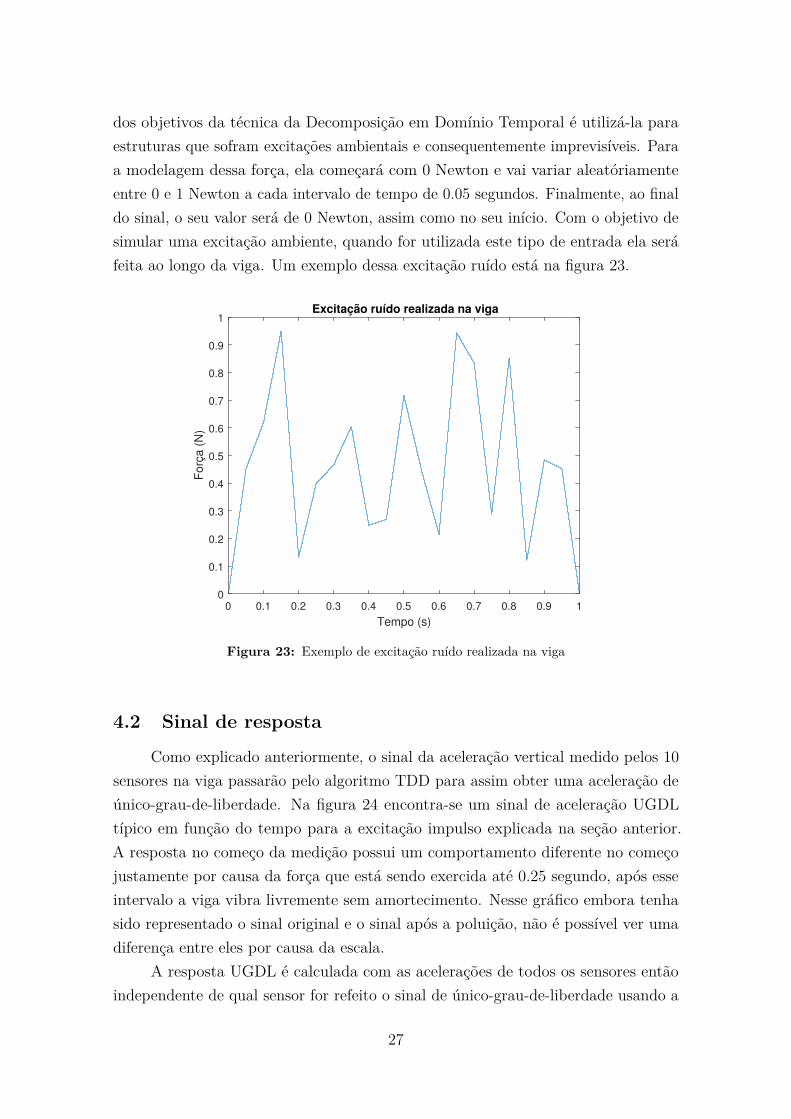
dos objetivos da técnica da Decomposição em Domínio Temporal é utilizá-la paraestruturas que sofram excitações ambientais e consequentemente imprevisíveis. Paraa modelagem dessa força, ela começará com 0 Newton e vai variar aleatóriamenteentre 0 e 1 Newton a cada intervalo de tempo de 0.05 segundos. Finalmente, ao finaldo sinal, o seu valor será de 0 Newton, assim como no seu início. Com o objetivo desimular uma excitação ambiente, quando for utilizada este tipo de entrada ela seráfeita ao longo da viga. Um exemplo dessa excitação ruído está na figura 23.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1Tempo (s)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Forç
a (N
)
Excitação ruído realizada na viga
Figura 23: Exemplo de excitação ruído realizada na viga
4.2 Sinal de resposta
Como explicado anteriormente, o sinal da aceleração vertical medido pelos 10sensores na viga passarão pelo algoritmo TDD para assim obter uma aceleração deúnico-grau-de-liberdade. Na figura 24 encontra-se um sinal de aceleração UGDLtípico em função do tempo para a excitação impulso explicada na seção anterior.A resposta no começo da medição possui um comportamento diferente no começojustamente por causa da força que está sendo exercida até 0.25 segundo, após esseintervalo a viga vibra livremente sem amortecimento. Nesse gráfico embora tenhasido representado o sinal original e o sinal após a poluição, não é possível ver umadiferença entre eles por causa da escala.
A resposta UGDL é calculada com as acelerações de todos os sensores entãoindependente de qual sensor for refeito o sinal de único-grau-de-liberdade usando a
27

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1Tempo (s)
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1A
cele
raçã
o (m
/s²)
Medição da aceleração em função do tempo no sensor 4
Sinal originalSinal poluido
Figura 24: Sinal de resposta da aceleração em função do tempo após a aplicação do TDD parauma excitação impulso.
equação 2.15, a resposta será a mesma mudando apenas a sua magnitude. Assim,apenas de forma ilustrativa será denominado um sensor para refazer o sinal e formara Densidade Espectral de Potência correspondente, mas não há uma importância emqual sensor escolher. Isso pode ser visto na figura 25 , onde é realizada a DensidadeEspectral de Potência para os sensores 2 e 5 após a aplicação do TDD.
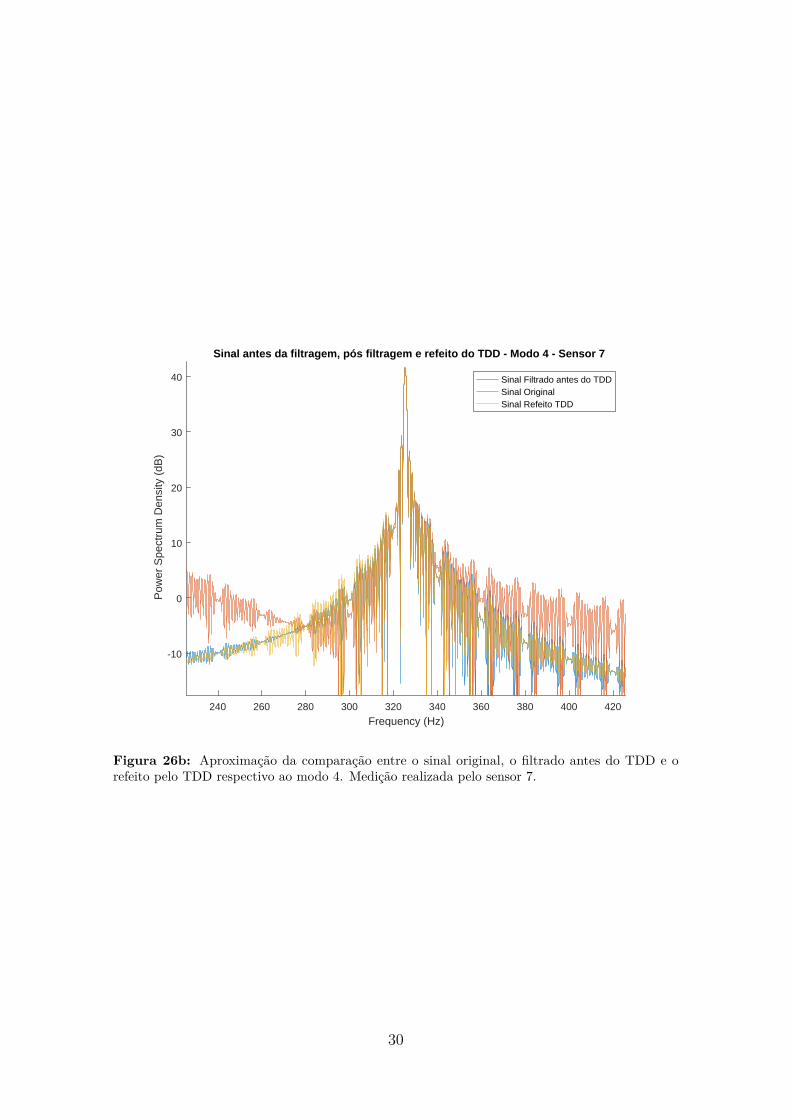
Por fim, para uma última análise do sinal de resposta, é comparado os resultadosem três situações: sinal original da aceleração medido, o sinal da aceleração filtradoe o sinal da aceleração UGDL refeito pelo método TDD. Todos esses sinais estãorepresentados na figura 26a para a medição no sensor 7 e com a filtragem no modo 4.Em seguida na figura 26b é feita uma aproximação para a faixa respectiva ao pico dafrequência do quarto modo de vibração. Observa-se claramente o efeito da filtragemexercida no sinal e também o do método TDD, que transforma o sinal MGDL emUGDL. Ao se aproximar do pico respectivo à frequência natural, a diferença entre os3 sinais diminuem até se tornarem indistinguíveis, como pode ser visto no gráfico dafigura 26b.
28

0 100 200 300 400 500 600Frequência (Hz)
-60
-40
-20
0
20
40P
ower
Spe
ctru
m D
ensi
ty (d
B)
PSD do sensor 2 após TDD
0 100 200 300 400 500 600Frequência (Hz)
-60
-40
-20
0
20
40
Pow
er S
pect
rum
Den
sity
(dB
)
PSD do sensor 5 após TDD
Figura 25: Densidade Espectral de Potência do sinal refeito após TDD para os sensores 2 e 5(filtragem do terceiro modo)
0 100 200 300 400 500 600
Frequency (Hz)
-60
-40
-20
0
20
40
60
80
Pow
er S
pect
rum
Den
sity
(dB
)
Sinal antes da filtragem, pós filtragem e refeito do TDD - Modo 4 - Sensor 7
Sinal Filtrado antes do TDDSinal OriginalSinal Refeito TDD
Figura 26a: Comparação entre o sinal original, o filtrado antes do TDD e o refeito pelo TDDrespectivo ao modo 4. Medição realizada pelo sensor 7.
29
240 260 280 300 320 340 360 380 400 420
Frequency (Hz)
-10
0
10
20
30
40
Pow
er S
pect
rum
Den
sity
(dB
)
Sinal antes da filtragem, pós filtragem e refeito do TDD - Modo 4 - Sensor 7
Sinal Filtrado antes do TDDSinal OriginalSinal Refeito TDD
Figura 26b: Aproximação da comparação entre o sinal original, o filtrado antes do TDD e orefeito pelo TDD respectivo ao modo 4. Medição realizada pelo sensor 7.
30

4.3 Método de comparação
Antes de começar as análises, é necessário fazer uma breve explicação dosmétodos de comparação que serão utlizados.
Para a comparação dos modos de vibração naturais, que é o principal objetivoda técnica TDD, será utilizado o Modal Assurance Criterion ou MAC.O númeroMAC varia entre 0 e 1 tal que MAC tende a 1 quando existe uma relação linear entreos dois vetores, e MAC tende a 0 caso contrário.O MAC pode ser pensado como oquadrado da correlação entre dois vetores modais. Dessa forma, um bom resultadoserá se o valor MAC entre a forma modal encontrada pelo TDD e a encontrada pelocálculo teórico forem perto de 1. Na equação 4.1 encontra-se como é feito o cálculodo MAC.
MAC(ϕr,ϕs) = |ϕTr ϕs|2
(ϕTr ϕr)(ϕT
s ϕs) (4.1)
Onde ϕr e ϕs são os dois vetores à serem comparadosPara a frequência natural de vibração, a comparação será feita tendo como
referência as frequências de pico da tabela 4 que são as frequências naturaisencontradas no sinal de resposta medido pela modelo de elementos finito antes dafiltragem, e não as frequências naturais de vibração teóricas encontradas através docálculo do problema de autovalores. Essa forma de analisar os resultados também émais próximo de um método real de medição, uma vez que é mais difícil resolver asolução teórica. Assim, a diferença entre os valores medidos e os encontrados peloTDD é dado pela equação 4.2
∆ TDD(%) = |ωr − ωT DD
ωr
|×100 (4.2)
Onde ωr é a frequência natural de vibração de referência (Tabela 4) e ωT DD éa frequência natural obtida pelo método da Decomposição em Domínio Temporalapós refazer o sinal das acelerações em único-grau-de-liberdade.
Finalmente, também será analisado o peso do ruído do sinal. O objetivo éanalisar a influência dos erros de medição, seja do filtro ou dos dados poluídos, sobreo resultado encontrado da forma modal. Conforme visto no capítulo 2, esses erroscorrespondem ao nível dos valores de σ da matriz Ω = diag[qi, σ1, σ2 . . . σp−1].Comoσ1 é bem maior que os demais valores de σ, os outros serão negligenciados. Sendo qi
o peso do vetor da forma modal do sinal, a influência do ruído no sinal será calculadopela equação 4.3 abaixo
31

CR(%) = σ1
σ1 + qi
× 100 (4.3)
Onde CR significa Contribuição do Ruído no Sinal.
4.4 Análises
4.4.1 Resposta com excitação impulso no sensor 10 ao final da viga
Primeiramente é analisada a resposta para a configuração mais simples, umaexcitação impulso na ponta da viga, e assim será estudada a resposta da aceleraçãoobtida pelo algoritmo do TDD. Lembra-se que o TDD filtra o sinal UGDL porfrequência natural, assim cada modo de vibração vai ter o seu próprio resultado, queé visto no fluxograma da figura 3. Como discutido na seção anterior, os resultadosse encontram divididos em três partes, um estudo sobre os valores obtidos do MACem relação às formas modais teóricas, outro sobre as frequências naturais medidascom a aceleração em UGDL e o último com os valores da contribuição do ruído nosistema de acordo com a equação 4.3. Em cada um dos três estudos haverá umamedição para o sinal de aceleração sem alterações e haverá também a aceleraçãoobtida após uma poluição de dados como descrito na equação 3.3 onde é adicionadoum pequeno fator aleatório para simular um ruído no sinal. Como os dados poluídostêm natureza aleatória, o seu valor vai mudar a cada medição e assim foram feitastrês medições. Esses resultados se encontram nas tabelas 5, 6 e 7 respectivamentepara o MAC, para a frequência natural e para o ruído
Tabela 5: Valores MAC das formas modais obtidas pelo TDD para um excitação impulso nosensor 10. Medição feita com os dados de aceleração sem alteração e com os dados poluídos.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5MAC
Sinal não poluído 1.0000 0.9981 1.0000 1.0000 1.0000
MAC - Sinal poluídoMedição 1 1.0000 0.9982 1.0000 1.0000 0.9999
MAC - Sinal poluídoMedição 2 1.0000 0.9981 1.0000 1.0000 0.9999
MAC - Sinal poluídoMedição 3 1.0000 0.9981 1.0000 1.0000 0.9999
Como os valores de MAC são próximos de 1, o resultado obtido pelo o métododa Decomposição em Domínio Temporal para encontrar as formas modais éextremamente próximo dos vetores encontrados pelo cálculo teórico obtidos aoresolver o problema de autovetores. Pode-se observar que poluir o sinal não altera o
32

resultado final de forma significativa. No caso das 3 medições de dados poluídos,apenas os modos 2 e 5 tiveram um valor alterado para o número MAC, mas deforma desprezível. Dessa forma, conclui-se que na configuração de excitação impulsona ponta da viga, o método TDD possui uma boa capacidade de predição dasformas naturais de vibração e que para este fim ele é consideravelmente robusto àperturbações no sinal.
Tabela 6: Frequências naturais encontrados com o sinal refeito após o método TDD para umexcitação impulso no sensor 10. Medição feita com os dados de aceleração sem alteração e com osdados poluídos.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5ω (Hz)
Sinal não poluído 9.35 58.99 166.37 325.19 534.61
ω - Sinal poluídoMedição 1 (Hz) 9.35 58.99 166.37 325.19 534.61
ω - Sinal poluídoMedição 2 (Hz) 9.35 58.99 166.37 325.19 534.62
ω - Sinal poluídoMedição 3 (Hz) 9.35 58.99 166.37 325.19 534.62
∆ TDD(%) 1.05 0.1 0.02 0.003 0.0019
Em seguida, será analisada a capacidade do TDD em encontrar as frequênciasnaturais de vibração.
As frequências de referência são de 9.45 Hz, 59.05 Hz, 166.4 Hz, 325.2 Hz e534.6 Hz respectivamente para os modos 1, 2, 3, 4 e 5, e as diferençascorrespondentes se encontram na tabela 6. Conclui-se então que as frequênciasnaturais também dão resultados muito próximos dos que foram medidos pelo sinalde aceleração de múltiplo-grau-de-liberdade antes da aplicação do filtro e o métodoTDD está consistente para essa configuração. Por fim, mais uma vez os resultadosdas frequências naturais não sofrem alteração significativa ao aplicar uma poluiçãoaleatória nos dados.
O último estudo para esse caso é para a contribuição do ruído no sinal.Ao analisar a tabela 7, pode-se ver que o peso do ruído varia entre cada modo
sem ordem aparente. Nota-se também que ao adicionar a poluição aleatória nosdados de medida, o valor do ruído tem uma ligeira variação, com máximo de 1.2%,conclui-se então que o nível de 1% de poluição não gera um impacto significativopara esta configuração. Por fim, observa-se que um valor de peso do ruído altoestá relacionado aos modos que possuem o valor de MAC diferente de 1, e quantomaior a contribuição, maior é essa diferença. Dessa forma, uma hipótese é que umacontribuição de ruído elevada pode diminuir a eficiência do método TDD e assim
33
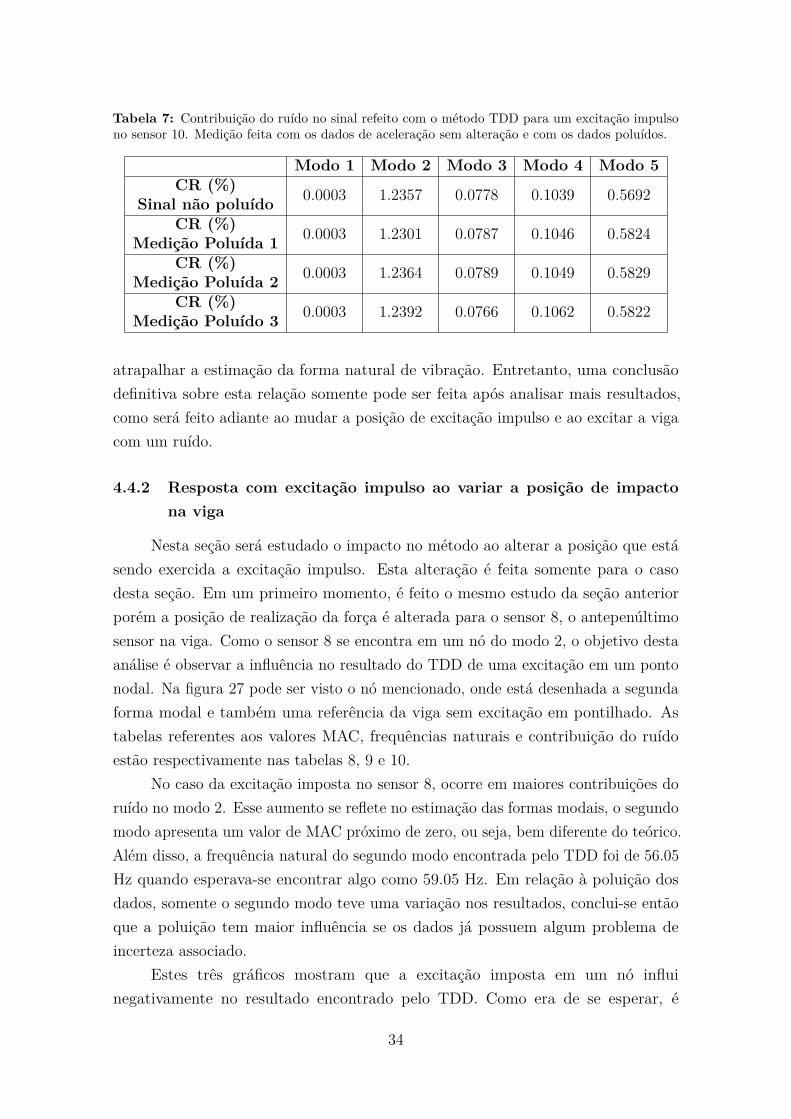
Tabela 7: Contribuição do ruído no sinal refeito com o método TDD para um excitação impulsono sensor 10. Medição feita com os dados de aceleração sem alteração e com os dados poluídos.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5CR (%)
Sinal não poluído 0.0003 1.2357 0.0778 0.1039 0.5692
CR (%)Medição Poluída 1 0.0003 1.2301 0.0787 0.1046 0.5824
CR (%)Medição Poluída 2 0.0003 1.2364 0.0789 0.1049 0.5829
CR (%)Medição Poluído 3 0.0003 1.2392 0.0766 0.1062 0.5822
atrapalhar a estimação da forma natural de vibração. Entretanto, uma conclusãodefinitiva sobre esta relação somente pode ser feita após analisar mais resultados,como será feito adiante ao mudar a posição de excitação impulso e ao excitar a vigacom um ruído.
4.4.2 Resposta com excitação impulso ao variar a posição de impactona viga
Nesta seção será estudado o impacto no método ao alterar a posição que estásendo exercida a excitação impulso. Esta alteração é feita somente para o casodesta seção. Em um primeiro momento, é feito o mesmo estudo da seção anteriorporém a posição de realização da força é alterada para o sensor 8, o antepenúltimosensor na viga. Como o sensor 8 se encontra em um nó do modo 2, o objetivo destaanálise é observar a influência no resultado do TDD de uma excitação em um pontonodal. Na figura 27 pode ser visto o nó mencionado, onde está desenhada a segundaforma modal e também uma referência da viga sem excitação em pontilhado. Astabelas referentes aos valores MAC, frequências naturais e contribuição do ruídoestão respectivamente nas tabelas 8, 9 e 10.
No caso da excitação imposta no sensor 8, ocorre em maiores contribuições doruído no modo 2. Esse aumento se reflete no estimação das formas modais, o segundomodo apresenta um valor de MAC próximo de zero, ou seja, bem diferente do teórico.Além disso, a frequência natural do segundo modo encontrada pelo TDD foi de 56.05Hz quando esperava-se encontrar algo como 59.05 Hz. Em relação à poluição dosdados, somente o segundo modo teve uma variação nos resultados, conclui-se entãoque a poluição tem maior influência se os dados já possuem algum problema deincerteza associado.
Estes três gráficos mostram que a excitação imposta em um nó influinegativamente no resultado encontrado pelo TDD. Como era de se esperar, é
34
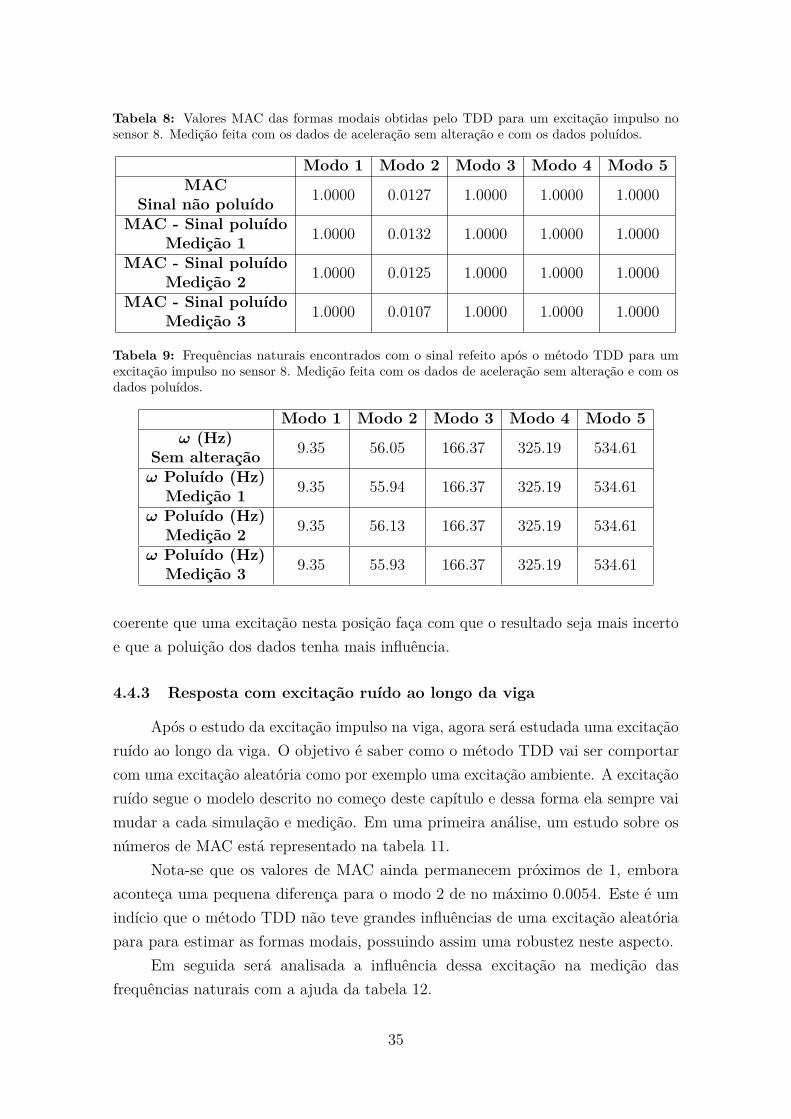
Tabela 8: Valores MAC das formas modais obtidas pelo TDD para um excitação impulso nosensor 8. Medição feita com os dados de aceleração sem alteração e com os dados poluídos.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5MAC
Sinal não poluído 1.0000 0.0127 1.0000 1.0000 1.0000
MAC - Sinal poluídoMedição 1 1.0000 0.0132 1.0000 1.0000 1.0000
MAC - Sinal poluídoMedição 2 1.0000 0.0125 1.0000 1.0000 1.0000
MAC - Sinal poluídoMedição 3 1.0000 0.0107 1.0000 1.0000 1.0000
Tabela 9: Frequências naturais encontrados com o sinal refeito após o método TDD para umexcitação impulso no sensor 8. Medição feita com os dados de aceleração sem alteração e com osdados poluídos.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5ω (Hz)
Sem alteração 9.35 56.05 166.37 325.19 534.61
ω Poluído (Hz)Medição 1 9.35 55.94 166.37 325.19 534.61
ω Poluído (Hz)Medição 2 9.35 56.13 166.37 325.19 534.61
ω Poluído (Hz)Medição 3 9.35 55.93 166.37 325.19 534.61
coerente que uma excitação nesta posição faça com que o resultado seja mais incertoe que a poluição dos dados tenha mais influência.
4.4.3 Resposta com excitação ruído ao longo da viga
Após o estudo da excitação impulso na viga, agora será estudada uma excitaçãoruído ao longo da viga. O objetivo é saber como o método TDD vai ser comportarcom uma excitação aleatória como por exemplo uma excitação ambiente. A excitaçãoruído segue o modelo descrito no começo deste capítulo e dessa forma ela sempre vaimudar a cada simulação e medição. Em uma primeira análise, um estudo sobre osnúmeros de MAC está representado na tabela 11.
Nota-se que os valores de MAC ainda permanecem próximos de 1, emboraaconteça uma pequena diferença para o modo 2 de no máximo 0.0054. Este é umindício que o método TDD não teve grandes influências de uma excitação aleatóriapara para estimar as formas modais, possuindo assim uma robustez neste aspecto.
Em seguida será analisada a influência dessa excitação na medição dasfrequências naturais com a ajuda da tabela 12.
35
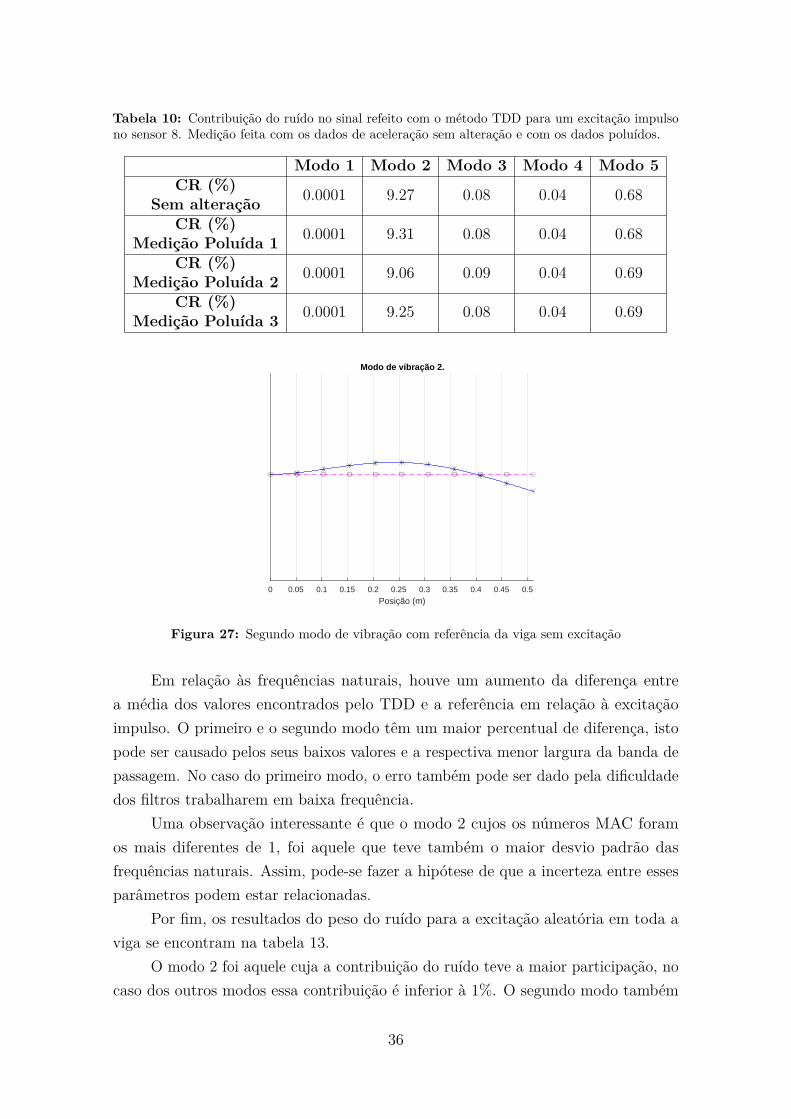
Tabela 10: Contribuição do ruído no sinal refeito com o método TDD para um excitação impulsono sensor 8. Medição feita com os dados de aceleração sem alteração e com os dados poluídos.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5CR (%)
Sem alteração 0.0001 9.27 0.08 0.04 0.68
CR (%)Medição Poluída 1 0.0001 9.31 0.08 0.04 0.68
CR (%)Medição Poluída 2 0.0001 9.06 0.09 0.04 0.69
CR (%)Medição Poluída 3 0.0001 9.25 0.08 0.04 0.69
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Posição (m)
Modo de vibração 2.
Figura 27: Segundo modo de vibração com referência da viga sem excitação
Em relação às frequências naturais, houve um aumento da diferença entrea média dos valores encontrados pelo TDD e a referência em relação à excitaçãoimpulso. O primeiro e o segundo modo têm um maior percentual de diferença, istopode ser causado pelos seus baixos valores e a respectiva menor largura da banda depassagem. No caso do primeiro modo, o erro também pode ser dado pela dificuldadedos filtros trabalharem em baixa frequência.
Uma observação interessante é que o modo 2 cujos os números MAC foramos mais diferentes de 1, foi aquele que teve também o maior desvio padrão dasfrequências naturais. Assim, pode-se fazer a hipótese de que a incerteza entre essesparâmetros podem estar relacionadas.
Por fim, os resultados do peso do ruído para a excitação aleatória em toda aviga se encontram na tabela 13.
O modo 2 foi aquele cuja a contribuição do ruído teve a maior participação, nocaso dos outros modos essa contribuição é inferior à 1%. O segundo modo também
36

Tabela 11: Valores de MAC para uma excitação do tipo ruído ao longo da viga.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5MAC
Medição 1 1.0000 0.9959 1.0000 0.9998 0.9999
MACMedição 2 1.0000 0.9972 0.9999 1.0000 1.0000
MACMedição 3 1.0000 0.9946 0.9998 0.9997 0.9999
Tabela 12: Frequências naturais do sinal refeito para uma excitação do tipo ruído ao longo daviga.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5ω (Hz)
Medição 1 8.85 59.28 166.36 325.59 534.23
ω (Hz)Medição 2 9.24 56.43 166.89 325.28 534.59
ω (Hz)Medição 3 9.13 52.88 166.17 325.64 534.32
Media ω (Hz) 9.07 56.20 166.47 325.5 534.38Desvio Padrão ω (Hz) 0.16 2.62 0.29 0.16 0.15
∆ TDD entreωmedia e ωr (%) 4.02 4.83 0.04 0.09 0.04
teve uma maior variação nessas três medidas. Como consequência, esse foi o modoque teve a maior variação do número MAC na estimação modal, assim como o maiorerro em relação à estimação da frequência natural.
Em geral, pode-se dizer o TDD forneceu resultados acurados quando a excitaçãodo sistema foi do tipo aleatória. Os números MAC continuaram sendo próximos de1, que é o principal objetivo, e as frequências naturais, assim como o peso do ruídono sinal, tiveram resultados coerentes com o esperado.
4.4.4 Alteração da banda de passagem do filtro
Uma análise interessante é observar como o método da Decomposição emDomínio Temporal vai responder à uma alteração da largura da banda de passagemdo filtro passa banda. Dessa forma, além do filtro já projetado com frequênciasde corte variando em 10% entorno da frequência encontrada pelo PSD da respostaoriginal de aceleração, também será projetado outros dois filtros. Haverá um filtrocom banda menor que possui uma variação de 2% e um filtro com banda maior comessa variação de 30%.
Ao aplicar o método TDD para uma excitação impulso na borda da viga e sem
37

Tabela 13: Contribuição do ruído no sinal refeito para uma excitação do tipo aleatória ao longoda viga.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5CR (%)
Medição 1 0.003 1.870 0.122 1.253 0.6618
CR (%)Medição 2 0.008 1.494 0.103 0.659 0.714
CR (%)Medição 3 0.001 1.778 0.143 0.802 0.589
Media 0.004 1.714 0.123 0.905 0.655Desvio Padrão 0.002 0.16 0.016 0.25 0.051
poluir os dados, obtém-se os resultados das tabelas 14 e 15 ao usar o filtro de 2% e30% respectivamente. O resultado para o filtro com a variação de 10% se encontrana tabela 5, 6 e 7 para as linhas da medição sem poluição.
Tabela 14: Resultados de uma excitação impulso na borda da viga sem poluir os dados para umFiltro com variação da banda de passagem de 2%
Filtro com variação de 2% Modo 1 Modo 2 Modo 3 Modo 4 Modo 5MAC 1.0000 0.9988 1.0000 1.0000 1.0000
Frequência Natural (Hz) 9.21 58.81 166.36 325.419 5354.62Contribuição do ruído (%) 0.0003 0.104 0.018 0.007 0.007
Ao comparar os resultados usando o filtro de 10% como referência, o filtro combanda menor apresenta diferentes resultados. Com uma banda de passagem de 2%, ovalor de MAC melhorou ligeiramente embora que de forma negligenciável, entretantocomo ele já era próximo de 1 realmente seria difícil aumentar de forma significativa.As frequências naturais para o filtro menor também foram alteradas e dessa vez paravalores mais distante daqueles usados como referência. E por fim, a contribuição doruído no sinal refeito da aceleração diminuiu consideravelmente, sendo todos inferiorà 0.1%, como era de se esperar.
Tabela 15: Resultados de uma excitação impulso na borda da viga sem poluir os dados para umFiltro com variação da banda de passagem de 30%
Filtro com variação de 30% Modo 1 Modo 2 Modo 3 Modo 4 Modo 5MAC 1.0000 0.9961 1.0000 0.9991 0.9987
Frequência Natural (Hz) 9.44 59.02 166.37 325.19 534.61Contribuição do ruído (%) 0.0007 10.83 1.014 9.50 38.95
Ao analisar o filtro de banda maior, nota-se um comportamento inverso daqueleencontrado ao diminuir a banda de passagem. Os valores de MAC tendem à sedistanciar de 1 e assim a estimação do modo de vibração natural tende à piorar. As
38

frequências naturais ficam mais próximas dos valores de referência no caso dos modos1 e 2, já para os modos maiores como os 3, 4 e 5 as frequências não se alteram. Comuma filtragem pior, ocorre um aumento considerável na contribuição do ruído nosinal refeito da aceleração.
Na figura 28 há um comparativo da Densidade Espectral de Potência (PSD) feitoao aplicar os três tipos de filtro discutidos. Observa-se uma diferença considerávelno nível de ruído após a filtragem, que pode ser um fator decisivo ao analisar dadosreais. Assim, uma boa ideia é repetir essa análise para uma medição de resposta real,onde haverá maior ruído no sinal. No caso do estudo deste trabalho os dados sãosintéticos e assim é normal que o peso do ruído seja baixo, entretanto em um casoreal espera-se que esse fator seja maior. Dessa forma, é preferível diminuir a banda depassagem um vez que essa opção tende a fazer com que contribuição do ruído diminuaconsideravelmente como é visto na tabela 14. A vantagem da escolha do filtro commenor banda é que seu efeito é de aumentar a precisão da estimação das formasmodais com o aumento do número de MAC, que é o principal objetivo do TDD.Além disso, as frequências de vibração desse estudo são suficientemente espaçadas,caso elas fossem mais próximas, aumentar a banda de passagem certamente teriamais impactos negativos no resultado
0 200 400 600Frequency (Hz)
-20
-10
0
10
20
30
40
50
60
Pow
er S
pect
rum
Den
sity
(dB
)
Filtro de variação de 2% - Modo 4
0 200 400 600Frequency (Hz)
-40
-20
0
20
40
60
Pow
erS
pect
rum
Den
sity
(dB
)
Filtro de variação de 10% - Modo 4
0 200 400 600Frequency (Hz)
-60
-40
-20
0
20
40
60
Pow
er S
pect
rum
Den
sity
(dB
)
Filtro de variação de 30% - Modo 4
Figura 28: Resposta da aceleração UGDL (modo 4) para filtros de diferentes tamanhas de bandade passagem
Assim, é preferível diminuir a largura da banda de passagem, principalmentese as frequências naturais já forem conhecidas com uma boa precisão.
4.4.5 Adição de amortecimento ao modelo
A viga simulada até então não possuía amortecimento, como discutido na seção3, então nesta próxima análise será adicionada uma matriz de amortecimento Cao modelo. A matriz de amortecimento C será um amortecimento proporcional ouconhecida também como amortecimento de Rayleigh.
A forma da matriz de amortecimento de Rayleigh é dada por
39

C = αM + βK (4.4)
Onde os seus valores de α e β definidos são de respectivamente 1× 10−2 e 1× 10−5
na simulação.Para a comparação entre o modelo sem amortecimento e com amortecimento,
foi feita uma excitação impulso na borda da viga e os dados de medição não forampoluídos. Os gráficos de Densidade Espectral de Potência (PSD) para cada modelopara os modos 1, 3 e 5 encontram-se respectivamente nas figuras 29, 30, e 31.
0 20 40 60 80 100Frequency (Hz)
0
10
20
30
40
50
60
70
Pow
er S
pect
rum
Den
sity
(dB
)
Viga sem Amortecimento - Modo 1
0 20 40 60 80 100Frequency (Hz)
0
10
20
30
40
50
60
70
Pow
er S
pect
rum
Den
sity
(dB
)
Viga com Amortecimento - Modo 1
Figura 29: Power Spectrum Density (PSD) do sinal de aceleração do modo 1 para as vigas semamortecimento e com amortecimento
0 100 200 300 400 500 600Frequency (Hz)
-120
-100
-80
-60
-40
-20
0
20
Pow
er S
pect
rum
Den
sity
(dB
)
Viga sem Amortecimento - Modo 3
0 100 200 300 400 500 600Frequency (Hz)
-120
-100
-80
-60
-40
-20
0
20
Pow
erS
pect
rum
Den
sity
(dB
)
Viga com Amortecimento - Modo 3
Figura 30: Power Spectrum Density (PSD) do sinal de aceleração do modo 3 para as vigas semamortecimento e com amortecimentom
Ao observar os gráficos nota-se que há uma atenuação do sinal ao aumentara frequência natural de vibração. No primeiro modo não é nem mesmo observado
40
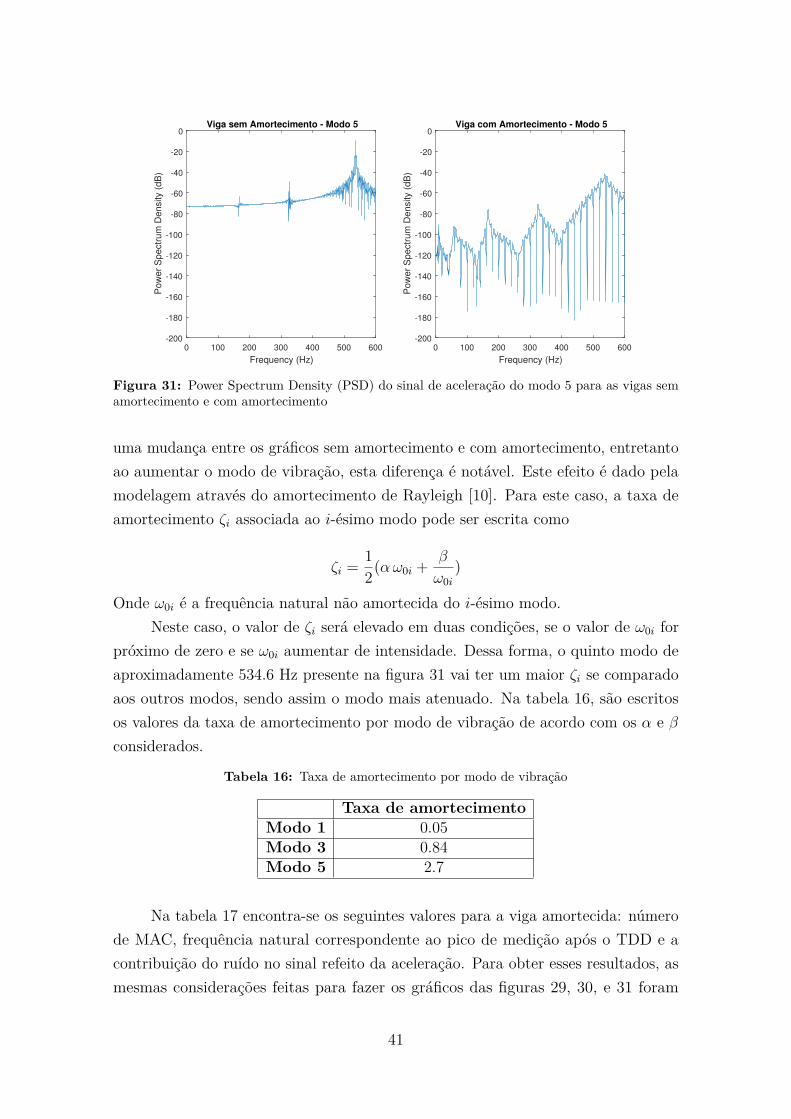
0 100 200 300 400 500 600Frequency (Hz)
-200
-180
-160
-140
-120
-100
-80
-60
-40
-20
0
Pow
er S
pect
rum
Den
sity
(dB
)
Viga sem Amortecimento - Modo 5
0 100 200 300 400 500 600Frequency (Hz)
-200
-180
-160
-140
-120
-100
-80
-60
-40
-20
0
Pow
er S
pect
rum
Den
sity
(dB
)
Viga com Amortecimento - Modo 5
Figura 31: Power Spectrum Density (PSD) do sinal de aceleração do modo 5 para as vigas semamortecimento e com amortecimento
uma mudança entre os gráficos sem amortecimento e com amortecimento, entretantoao aumentar o modo de vibração, esta diferença é notável. Este efeito é dado pelamodelagem através do amortecimento de Rayleigh [10]. Para este caso, a taxa deamortecimento ζi associada ao i-ésimo modo pode ser escrita como
ζi = 12(αω0i + β
ω0i
)
Onde ω0i é a frequência natural não amortecida do i-ésimo modo.Neste caso, o valor de ζi será elevado em duas condições, se o valor de ω0i for
próximo de zero e se ω0i aumentar de intensidade. Dessa forma, o quinto modo deaproximadamente 534.6 Hz presente na figura 31 vai ter um maior ζi se comparadoaos outros modos, sendo assim o modo mais atenuado. Na tabela 16, são escritosos valores da taxa de amortecimento por modo de vibração de acordo com os α e βconsiderados.
Tabela 16: Taxa de amortecimento por modo de vibração
Taxa de amortecimentoModo 1 0.05Modo 3 0.84Modo 5 2.7
Na tabela 17 encontra-se os seguintes valores para a viga amortecida: númerode MAC, frequência natural correspondente ao pico de medição após o TDD e acontribuição do ruído no sinal refeito da aceleração. Para obter esses resultados, asmesmas considerações feitas para fazer os gráficos das figuras 29, 30, e 31 foram
41

utilizadas. Em relação à viga sem amortecimento, os resultados são aquelesencontrados na linha da medição sem poluição das tabelas 5, 6 e 7.
Tabela 17: Resultado relativo à uma viga com amortecimento de Rayleigh. Excitação impulso naborda da viga sem poluição dos dados
Viga com Amortecimento Modo 1 Modo 2 Modo 3 Modo 4 Modo 5MAC 1.0000 0.9979 0.9999 0.9999 0.9998
Frequência Natural (Hz) 9.35 57.57 166.12 324.28 535.94Contribuição do ruído (%) 0.0003 1.3009 0.4978 1.9891 5.776
Em relação aos números MAC obtidos, a viga com amortecimento tem umresultado praticamente igual à da viga sem amortecimento. Como o amortecimentonão é muito elevado, esse era o resultado esperado uma vez que o método do TDDencontra as formas modais não amortecidas, assim os resultados de uma viga comamortecimento deveriam ser próximos de uma viga não amortecida. Já para asfrequências naturais, pode-se ver que as frequências naturais da viga amortecidatendem a ser menores que as da viga não amortecida, exceto pelo modo 5 que o sinalé muito perturbado. Esse resultado também é coerente uma vez que para a vigaamortecida é encontrado as frequências naturais amortecidas que são menores que asfrequências naturais não amortecidas. Finalmente, a contribuição do ruído no sinalrefeito é maior para a viga amortecida, principalmente para os modos 4 e 5, onde aatenuação do sinal é maior.
Conclui-se, então, que a adição do amortecimento está coerente com a teoria ecom o que se espera acontecer com o modelo.
4.4.6 Aumento da poluição dos dados
Como foi observado pelas tabelas 5, 6 e 7 para a excitação impulso, a umapoluição dos dados de 1% do valor máximo da medição não gera uma diferençaconsiderável no resultado do TDD. Assim, o fator de poluição dos dados seráaumentado para testar a robustez do método da Decomposição em Domínio Temporal.Na seguinte análise, a poluição dos dados no sinal medido da aceleração mudarápara 10% do máximo da medição e será feita uma excitação impulso na borda livreda viga. Os resultados para o número MAC, para frequência natural do sinal refeitopelo TDD e para a contribuição do ruído no sinal se encontram respectivamente nastabelas 18, 19 e 20.
Ao adicionar uma poluição de 10% no sinal da aceleração, houve uma diferençano resultado, ao contrário da poluição de 1%. Com exceção do primeiro modo, onúmero de MAC apresentou valores mais diferentes de 1, embora que ainda próximos
42
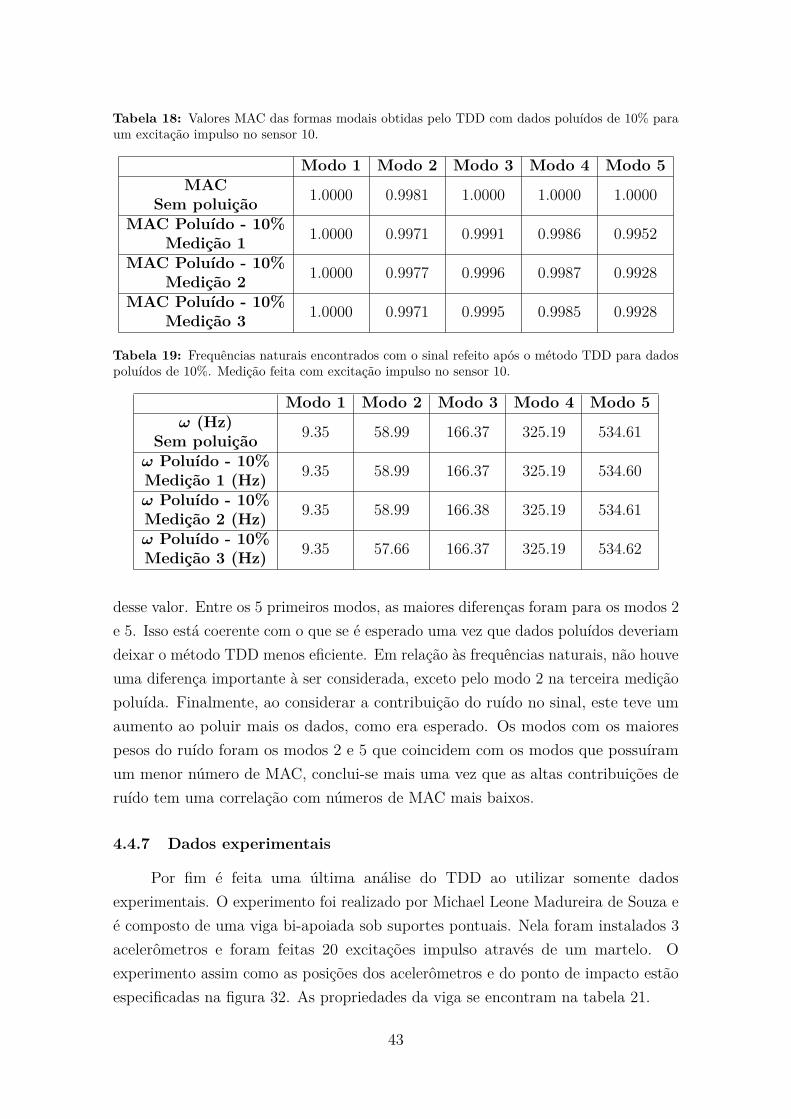
Tabela 18: Valores MAC das formas modais obtidas pelo TDD com dados poluídos de 10% paraum excitação impulso no sensor 10.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5MAC
Sem poluição 1.0000 0.9981 1.0000 1.0000 1.0000
MAC Poluído - 10%Medição 1 1.0000 0.9971 0.9991 0.9986 0.9952
MAC Poluído - 10%Medição 2 1.0000 0.9977 0.9996 0.9987 0.9928
MAC Poluído - 10%Medição 3 1.0000 0.9971 0.9995 0.9985 0.9928
Tabela 19: Frequências naturais encontrados com o sinal refeito após o método TDD para dadospoluídos de 10%. Medição feita com excitação impulso no sensor 10.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5ω (Hz)
Sem poluição 9.35 58.99 166.37 325.19 534.61
ω Poluído - 10%Medição 1 (Hz) 9.35 58.99 166.37 325.19 534.60
ω Poluído - 10%Medição 2 (Hz) 9.35 58.99 166.38 325.19 534.61
ω Poluído - 10%Medição 3 (Hz) 9.35 57.66 166.37 325.19 534.62
desse valor. Entre os 5 primeiros modos, as maiores diferenças foram para os modos 2e 5. Isso está coerente com o que se é esperado uma vez que dados poluídos deveriamdeixar o método TDD menos eficiente. Em relação às frequências naturais, não houveuma diferença importante à ser considerada, exceto pelo modo 2 na terceira mediçãopoluída. Finalmente, ao considerar a contribuição do ruído no sinal, este teve umaumento ao poluir mais os dados, como era esperado. Os modos com os maiorespesos do ruído foram os modos 2 e 5 que coincidem com os modos que possuíramum menor número de MAC, conclui-se mais uma vez que as altas contribuições deruído tem uma correlação com números de MAC mais baixos.
4.4.7 Dados experimentais
Por fim é feita uma última análise do TDD ao utilizar somente dadosexperimentais. O experimento foi realizado por Michael Leone Madureira de Souza eé composto de uma viga bi-apoiada sob suportes pontuais. Nela foram instalados 3acelerômetros e foram feitas 20 excitações impulso através de um martelo. Oexperimento assim como as posições dos acelerômetros e do ponto de impacto estãoespecificadas na figura 32. As propriedades da viga se encontram na tabela 21.
43

Tabela 20: Contribuição do ruído no sinal refeito com o método TDD para dados poluídos de10%. Medição feita com excitação impulso no sensor 10.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5CR (%)
Sem poluição 0.0003 1.2357 0.0778 0.1039 0.5692
CR (%)Medição Poluída 1 - 10% 0.0004 1.2234 0.3362 1.1187 5.493
CR (%)Medição Poluída 2 - 10% 0.0005 1.3969 0.3110 1.1648 5.713
CR (%)Medição Poluído 3 - 10% 0.0004 1.3835 0.3398 1.0453 5.627
Figura 32: Representação esquemática do experimento realizado por Souza
Souza mediu os valores de aceleração causados pelos 20 impactos em funçãodo tempo e estes dados podem ser utilizados para a aplicação do algoritmo TDD.Como explicado na metodologia, primeiramente deve-se ter uma ideia das frequênciasnaturais e para isso é feita a Densidade Espectral de Potência do sinal. O PSD dosinal obtido pelo acelerômetro 3 após um impacto do martelo é mostrado na figura33.
Dessa forma serão tomados arbitrariamente os 6 primeiros picos Espectral paraa aplicação do TDD. Para isso, deve-se analisar todos os três acelerômetros a fim deeliminar a possibilidade de que um acelerômetro esteja perto de um nó. Na próximaetapa, é projetado um filtro digital passa-banda com limites inferiores e superioresde respectivamente 90% e 110% da frequência de pico do modo. Assim, utiliza-seo FDATools para criar estes 6 filtros e em seguida aplicar as equações matriciaisestudadas.
Como há 20 impactos do martelo, o TDD será aplicada 20 vezes para cada umdos 6 modos. Ao final, serão extraídas as médias e os desvios padrões das formasmodais encontradas e das frequências naturais extraídas com o Peak-Picking dosinal UGDL refeito. Os resultados das frequências se encontram na tabela 22. Poruma questão de referência, é válido mencionar que Souza encontrou as frequências
44

Tabela 21: Propriedades da viga utilizada no experimento
Propriedades da viga realutilizada para a aquisição de dados
Módulo de Elasticidade 7.760 ×1010kN/mBase da viga 76.2 mmAltura da viga 6 mm
Comprimento da viga 1464 mmMassa volumétrica 2700 Kg/m3
naturais durante o seu experimento e os seus valores para os modos 1, 2, 3, 4, 5e 6 são de respectivamente 6.70 Hz, 26.91 Hz, 60.36 Hz, 107.28 Hz, 167.30 Hz e244.28 Hz. Por fim, os resultados das formas modais se encontram na tabela 23,onde φ1, φ2 e φ3 representam o coeficiente relativo à cada acelerômetro da formamodal φ = [φ1 φ2 φ3].
Tabela 22: Frequências naturais obtidas com dados experimentais para viga bi-apoiada.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5 Modo 6FrequênciaMédia (Hz) 6.79 26.95 60.52 106.44 166.70 242.40
FrequênciaDesvio Padrão (Hz) 0.003 0.004 0.02 0.33 0.13 1.2
Tabela 23: Formas modais obtidas com dados experimentais para viga bi-apoiada.
Modo 1 Modo 2 Modo 3 Modo 4 Modo 5 Modo 6φ1
Média -0.31 -0.67 -0.70 -0.78 -0.56 -0.77
φ1Desvio Padrão 0.004 0.001 0.004 0.037 0.012 0.122
φ2Média -0.60 -0.73 0.023 0.55 0.51 -0.012
φ2Desvio Padrão 0.005 0.001 0.014 0.091 0.023 0.068
φ3Média -0.74 0.11 0.71 -0.28 -0.65 0.58
φ3Desvio Padrão 0.005 0.003 0.005 0.069 0.011 0.205
Como o desvio padrão das frequências naturais e das formas modais aumentam,conclui-se que o método TDD apresenta mais incerteza conforme aumenta-se o modode vibração. Além deste fenômeno ter sido observado com os dados sintéticos, essaé uma conclusão coerente uma vez que um modo maior necessita de mais sensorespara ser bem determinado.
45
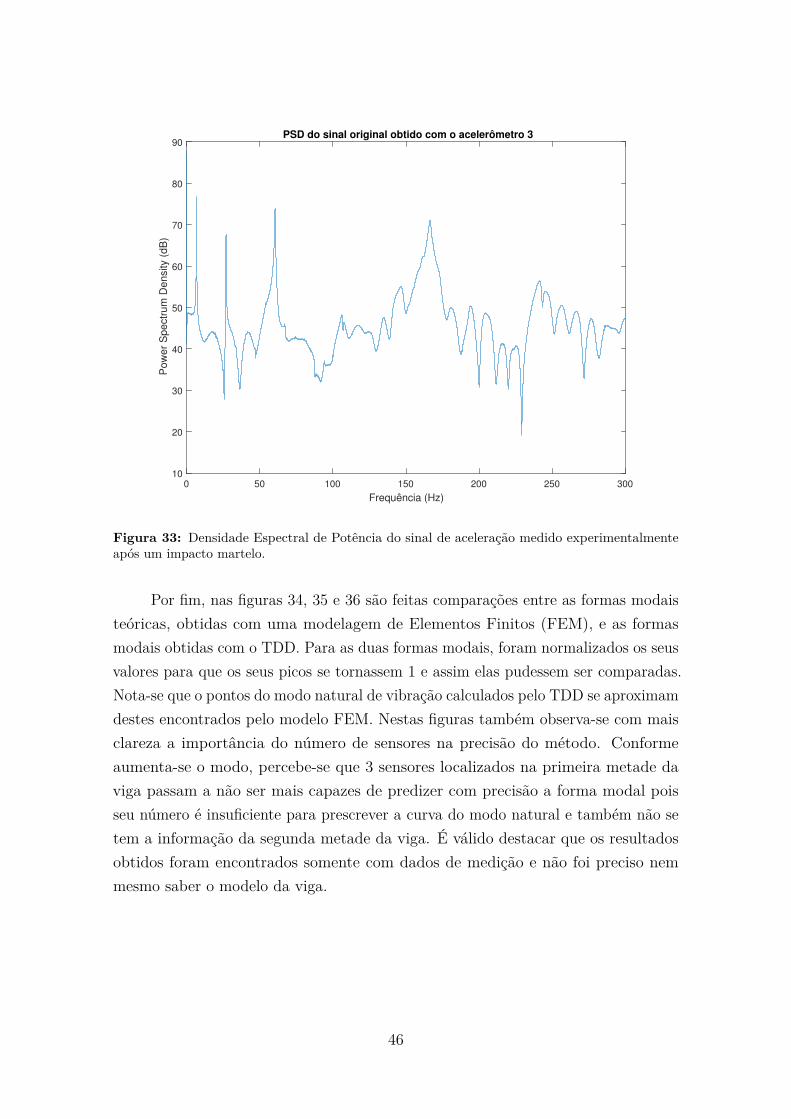
0 50 100 150 200 250 300Frequência (Hz)
10
20
30
40
50
60
70
80
90
Pow
er S
pect
rum
Den
sity
(dB
)
PSD do sinal original obtido com o acelerômetro 3
Figura 33: Densidade Espectral de Potência do sinal de aceleração medido experimentalmenteapós um impacto martelo.
Por fim, nas figuras 34, 35 e 36 são feitas comparações entre as formas modaisteóricas, obtidas com uma modelagem de Elementos Finitos (FEM), e as formasmodais obtidas com o TDD. Para as duas formas modais, foram normalizados os seusvalores para que os seus picos se tornassem 1 e assim elas pudessem ser comparadas.Nota-se que o pontos do modo natural de vibração calculados pelo TDD se aproximamdestes encontrados pelo modelo FEM. Nestas figuras também observa-se com maisclareza a importância do número de sensores na precisão do método. Conformeaumenta-se o modo, percebe-se que 3 sensores localizados na primeira metade daviga passam a não ser mais capazes de predizer com precisão a forma modal poisseu número é insuficiente para prescrever a curva do modo natural e também não setem a informação da segunda metade da viga. É válido destacar que os resultadosobtidos foram encontrados somente com dados de medição e não foi preciso nemmesmo saber o modelo da viga.
46
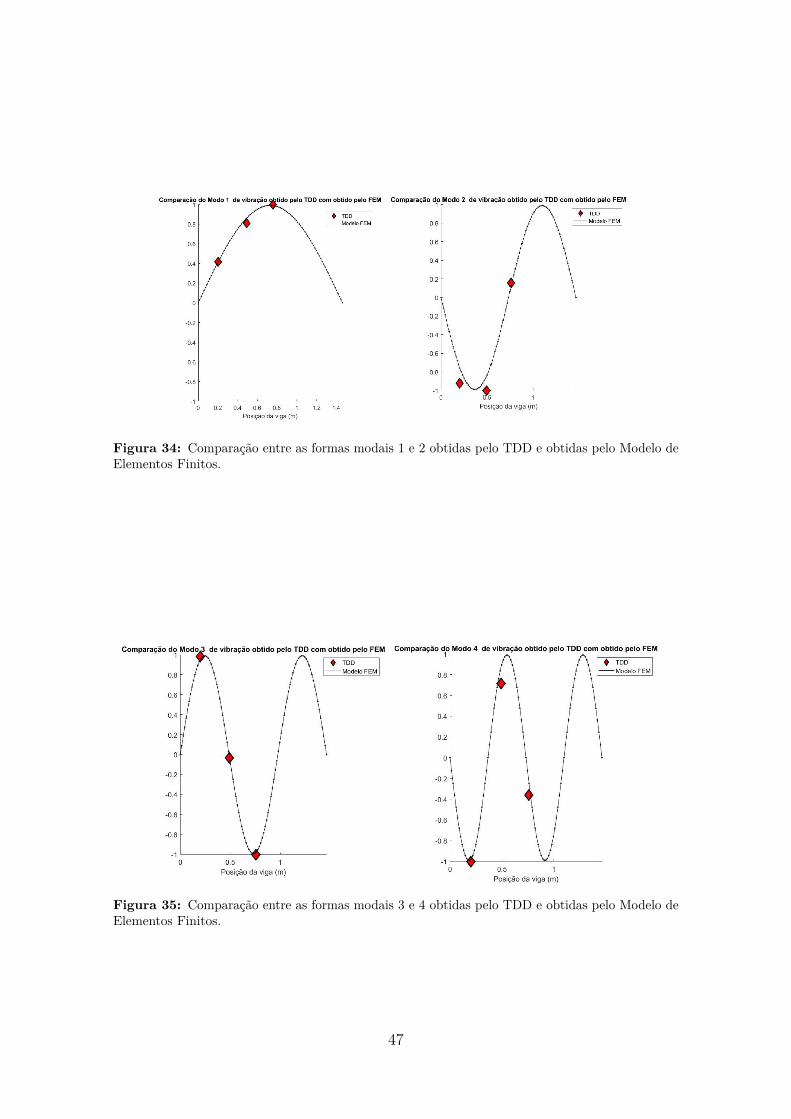
Figura 34: Comparação entre as formas modais 1 e 2 obtidas pelo TDD e obtidas pelo Modelo deElementos Finitos.
Figura 35: Comparação entre as formas modais 3 e 4 obtidas pelo TDD e obtidas pelo Modelo deElementos Finitos.
47
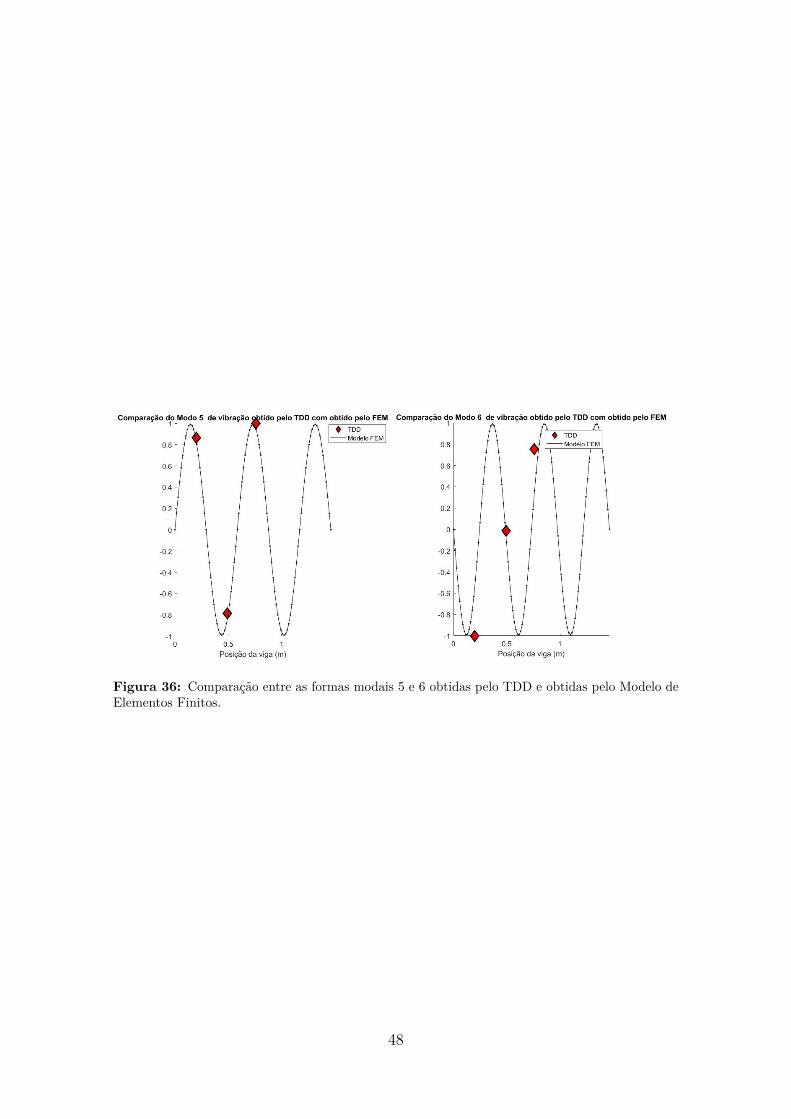
Figura 36: Comparação entre as formas modais 5 e 6 obtidas pelo TDD e obtidas pelo Modelo deElementos Finitos.
48

5 Conclusão
Este trabalho apresentou um breve estudo da técnica da Decomposição emDomínio Temporal que pode ser uma das ferramentas para a análise dos métodos deMonitorização da Integridade Estrutural. O TDD consiste em medir um sinal deresposta do sistema, filtrá-lo e aplicar uma série de operações matriciais para obteros parâmetros modais do sistema.
Primeiramente foi explicada a teoria por trás da técnica da Decomposição emDomínio temporal, dissertando sobre as hipóteses e os cálculos numéricos para aestimação da forma modal.
Em um segundo momento, foram apresentados o algoritmo em Matlab R©, amodelagem em elementos finitos e as considerações necessárias. Foi discutido sobrecomo estimar as frequências naturais à partir dos dados de medição e como é possívelimplementar o filtro digital no sinal.
No último capítulo foi feita a análise dos resultados obtidos ao aplicar o métododa Decomposição em Domínio Temporal em dados sintéticos e experimentais paradiferentes situações.
O método da Decomposição em Domínio Temporal correspondeu bem àsdiferentes análises, principalmente com o seu objetivo principal de estimar as formasnaturais de vibração. A única situação onde a estimação com maior diferença foipara o caso no qual a excitação impulso é realizada sobre um nó do respectivo modode vibração da viga.
Tendo como base as frequências naturais encontradas com o PSD do sinal daaceleração antes da filtragem, as frequências naturais encontradas ao refazer o sinalda aceleração pelo TDD foram relativamente próximas dos definidos como referência.Os valores da diferença nos piores casos são de 1% para excitação impulso e de 4.8%para a excitação ruído.
A contribuição do ruído no sinal UGDL refeito da aceleração foi próxima de 0para a maioria das situações, uma das causas é que os dados gerados são sintéticos enão reais. Essa contribuição tende a ser maior no quinto modo e está relacionadacom a incerteza do método ao estimar as formas modais. Alguns fatores podemcontribuir no aumento do peso do ruído no sinal, como uma excitação próxima àum nó, o aumento da largura da banda de passagem do filtro e a adição de umamortecimento ao modelo.
Ao utilizar apenas dados experimentais, o resultado foi promissor uma vez queos pontos calculados com o TDD coincidiram bem com a forma modal encontradapela modelagem FEM.
49

Referências
[1] E.CHATZI. "idenfitication methods for structural systems".http://www.chatzi.ibk.ethz.ch/education/identification-methods-for-structural-systems.html,"2015". [Online; acessado 30-Maio-2017].
[2] FARRAR, C.R.; WORDEN, K. An introduction to structural health monitoring.Philosophical transactions of the royal society, Dezembro 2006.
[3] FRISWELL, M.I. Damage identification using inverse methods. Philosophicaltransactions of the royal society, Dezembro 2006.
[4] BYEONG, H.K.; STUBBS, N.; PARK , T. A new method to extract modalparameters using output-only responses. Journal of Sound and Vibrations 282,2005.
[5] HERNANDEZ, W.P.; CASTELLO, D. A. et al. Uncertainty characterizationin measured modal properties for model calibration analysis. Congress ofMechanical Engineering, 2013.
[6] HERNANDEZ, W.; CASTELLO, D. et al. Análise da incerteza na estimativade parâmetros modais. XXXIV CILAMCE, 2013.
[7] FISH, J.; BELYTSCHKO, T. A First Course in Finite Elements. Ed. Wiley,2007.
[8] AUSTRELL, P-E et al. Calfem a finite element toolbox version 3.4. 2004.
[9] Inman, D. J. Engineering vibration. Prentice Hall, 2007.
[10] GERADIN, Michel.; RIXEN, D. J. Mechanical Vibrations, Theory andApplication to Structural Dynamics. Ed. Wiley, 3nd edition, 2015.
50